Katalog ECTS - program studiów kierunku Automatyka i ... fileKatalog ECTS - program studiów...
31
Katalog ECTS - program studiów kierunku Automatyka i robotyka, Studia II stopnia, rok akademicki 2013/2014 Automatyka i robotyka studia stacjonarne II stopnia profil ogólnoakademicki Lp Nazwa przedmiotu ECTS Rozkład zajęć w sem. (godz. w tygodniu) sem. 1 sem. 2 Sem. 3 w c l p w c l p w c l P 1 Metody optymalizacji 6 2 2 2 Modelowanie i identyfikacja 6 2 2 3 Teoria sterowania 6 2 2 4 Układy wykonawcze automatyki 6 2 2 5 Sensoryka i pomiary przemysłowe 6 2 2 Moduł ogólnouczelniany 8 Moduł ogólnouczelniany lub na innym kierunku 1 2 Moduł specjalistyczny – Komputerowe Systemy Automatyki 8 Inteligentne metody sterowania 6 2 2 9 Systemy zdarzeniowe 6 2 1 1 10 Lokalizacja i nawigacja robotów 6 2 2 11 Automatyzacja procesów przemysłowych 3 1 2 12 Zdecentralizowane układy automatyki i robotyki 6 2 2 13 Zaawansowane systemy decyzyjne 3 1 1 14 Systemy wieloagentowe 2 2 1 Wizja maszynowa w robotyce i automatyzacji 2 2 1 15 Metody programowania sterowników logicznych 2 2 1 Rekonfigurowalne wbudowane sterowniki logiczne 2 2 1 16 Automatyzacja systemów z odnawialnymi źródłami energii 2 1 1 Napędy urządzeń przemysłowych i pojazdów mechanicznych 2 1 1 17 Sterowanie w strukturze sieci rozległej 2 1 1 Systemy komunikacji 2 1 1 Praca dyplomowa 18 Praca przejściowa 2 2 19 Seminarium specjalistyczne 6 3 20 Seminarium dyplomowe I 4 1 21 Seminarium dyplomowe II 7 2 22 Problemy i zastosowania współczesnej techniki 2 1 Razem liczba godzin / punktów ECTS 90 10 0 10 0 10 0 6 6 6 0 7 6 20h / 30p 22h / 30p 19h+2h pula ogólnouczelniana / 30p w - wykład · c - ćwiczenia · l - laboratorium · p - projekt · egzamin
Transcript of Katalog ECTS - program studiów kierunku Automatyka i ... fileKatalog ECTS - program studiów...
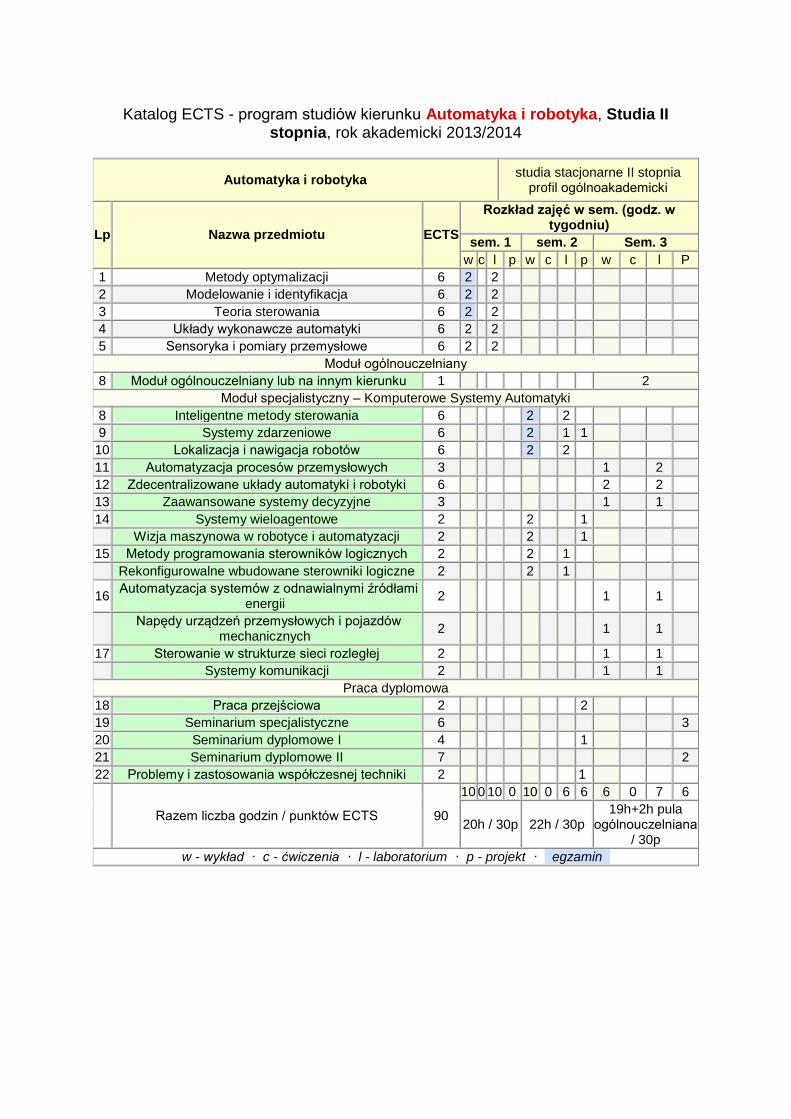
Katalog ECTS - program studiów kierunku Automatyka i robotyka, Studia II stopnia, rok akademicki 2013/2014
Automatyka i robotyka studia stacjonarne II stopnia
profil ogólnoakademicki
Lp Nazwa przedmiotu ECTS
Rozkład zajęć w sem. (godz. w tygodniu)
sem. 1 sem. 2 Sem. 3
w c l p w c l p w c l P
1 Metody optymalizacji 6 2 2
2 Modelowanie i identyfikacja 6 2 2
3 Teoria sterowania 6 2 2
4 Układy wykonawcze automatyki 6 2 2
5 Sensoryka i pomiary przemysłowe 6 2 2
Moduł ogólnouczelniany
8 Moduł ogólnouczelniany lub na innym kierunku 1 2
Moduł specjalistyczny – Komputerowe Systemy Automatyki
8 Inteligentne metody sterowania 6 2 2
9 Systemy zdarzeniowe 6 2 1 1
10 Lokalizacja i nawigacja robotów 6 2 2
11 Automatyzacja procesów przemysłowych 3 1 2
12 Zdecentralizowane układy automatyki i robotyki 6 2 2
13 Zaawansowane systemy decyzyjne 3 1 1
14 Systemy wieloagentowe 2 2 1
Wizja maszynowa w robotyce i automatyzacji 2 2 1
15 Metody programowania sterowników logicznych 2 2 1
Rekonfigurowalne wbudowane sterowniki logiczne 2 2 1
16 Automatyzacja systemów z odnawialnymi źródłami
energii 2 1 1
Napędy urządzeń przemysłowych i pojazdów
mechanicznych 2 1 1
17 Sterowanie w strukturze sieci rozległej 2 1 1
Systemy komunikacji 2 1 1
Praca dyplomowa
18 Praca przejściowa 2 2
19 Seminarium specjalistyczne 6 3
20 Seminarium dyplomowe I 4 1
21 Seminarium dyplomowe II 7 2
22 Problemy i zastosowania współczesnej techniki 2 1
Razem liczba godzin / punktów ECTS 90
10 0 10 0 10 0 6 6 6 0 7 6
20h / 30p 22h / 30p 19h+2h pula
ogólnouczelniana / 30p
w - wykład · c - ćwiczenia · l - laboratorium · p - projekt · egzamin
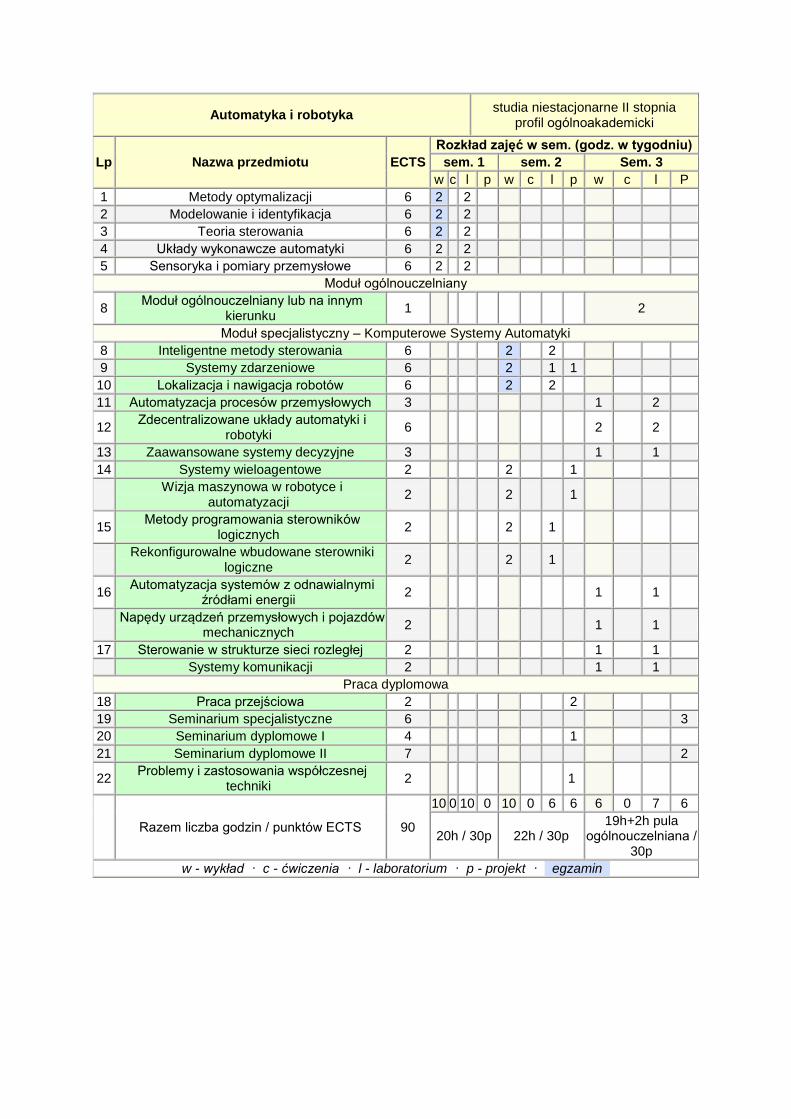
Automatyka i robotyka studia niestacjonarne II stopnia
profil ogólnoakademicki
Lp Nazwa przedmiotu ECTS
Rozkład zajęć w sem. (godz. w tygodniu)
sem. 1 sem. 2 Sem. 3
w c l p w c l p w c l P
1 Metody optymalizacji 6 2 2
2 Modelowanie i identyfikacja 6 2 2
3 Teoria sterowania 6 2 2
4 Układy wykonawcze automatyki 6 2 2
5 Sensoryka i pomiary przemysłowe 6 2 2
Moduł ogólnouczelniany
8 Moduł ogólnouczelniany lub na innym
kierunku 1 2
Moduł specjalistyczny – Komputerowe Systemy Automatyki
8 Inteligentne metody sterowania 6 2 2
9 Systemy zdarzeniowe 6 2 1 1
10 Lokalizacja i nawigacja robotów 6 2 2
11 Automatyzacja procesów przemysłowych 3 1 2
12 Zdecentralizowane układy automatyki i
robotyki 6 2 2
13 Zaawansowane systemy decyzyjne 3 1 1
14 Systemy wieloagentowe 2 2 1
Wizja maszynowa w robotyce i
automatyzacji 2 2 1
15 Metody programowania sterowników
logicznych 2 2 1
Rekonfigurowalne wbudowane sterowniki
logiczne 2 2 1
16 Automatyzacja systemów z odnawialnymi
źródłami energii 2 1 1
Napędy urządzeń przemysłowych i pojazdów
mechanicznych 2 1 1
17 Sterowanie w strukturze sieci rozległej 2 1 1
Systemy komunikacji 2 1 1
Praca dyplomowa
18 Praca przejściowa 2 2
19 Seminarium specjalistyczne 6 3
20 Seminarium dyplomowe I 4 1
21 Seminarium dyplomowe II 7 2
22 Problemy i zastosowania współczesnej
techniki 2 1
Razem liczba godzin / punktów ECTS 90
10 0 10 0 10 0 6 6 6 0 7 6
20h / 30p 22h / 30p 19h+2h pula
ogólnouczelniana / 30p
w - wykład · c - ćwiczenia · l - laboratorium · p - projekt · egzamin
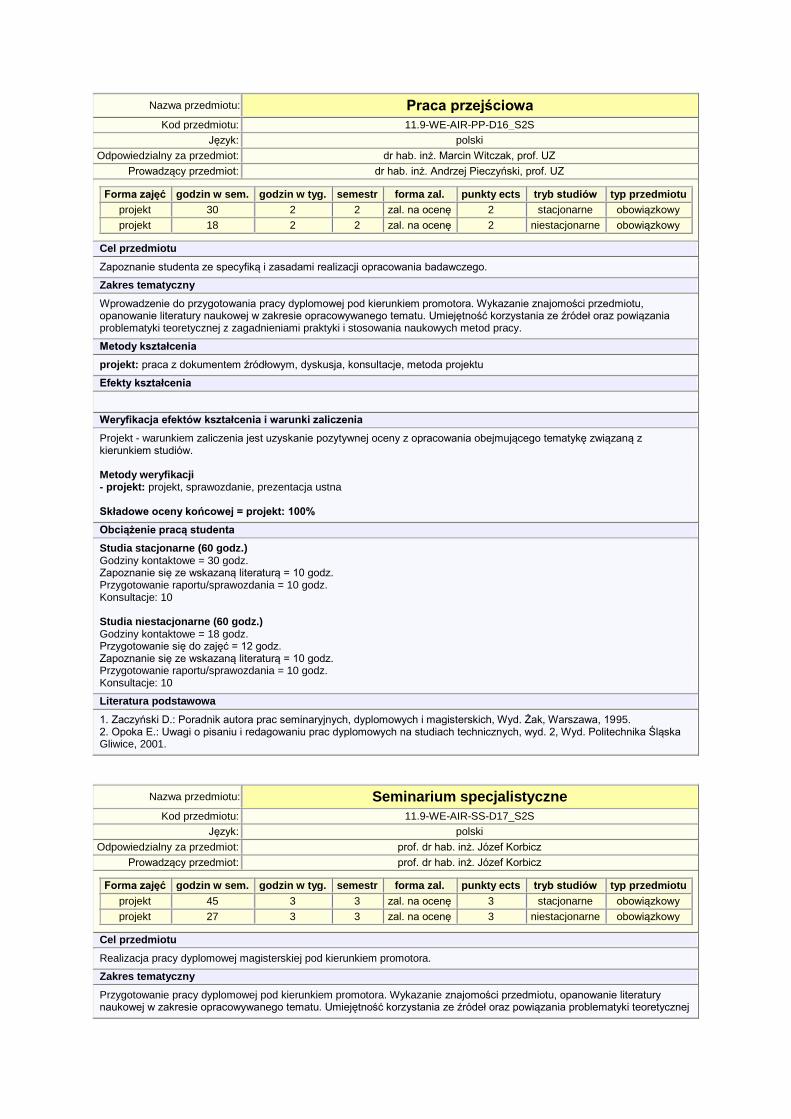
Nazwa przedmiotu: Praca przejściowa Kod przedmiotu: 11.9-WE-AIR-PP-D16_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Marcin Witczak, prof. UZ
Prowadzący przedmiot: dr hab. inż. Andrzej Pieczyński, prof. UZ
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
projekt 30 2 2 zal. na ocenę 2 stacjonarne obowiązkowy
projekt 18 2 2 zal. na ocenę 2 niestacjonarne obowiązkowy
Cel przedmiotu
Zapoznanie studenta ze specyfiką i zasadami realizacji opracowania badawczego.
Zakres tematyczny
Wprowadzenie do przygotowania pracy dyplomowej pod kierunkiem promotora. Wykazanie znajomości przedmiotu, opanowanie literatury naukowej w zakresie opracowywanego tematu. Umiejętność korzystania ze źródeł oraz powiązania problematyki teoretycznej z zagadnieniami praktyki i stosowania naukowych metod pracy.
Metody kształcenia
projekt: praca z dokumentem źródłowym, dyskusja, konsultacje, metoda projektu
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z opracowania obejmującego tematykę związaną z kierunkiem studiów. Metody weryfikacji - projekt: projekt, sprawozdanie, prezentacja ustna Składowe oceny końcowej = projekt: 100%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 30 godz. Zapoznanie się ze wskazaną literaturą = 10 godz. Przygotowanie raportu/sprawozdania = 10 godz. Konsultacje: 10 Studia niestacjonarne (60 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 10 godz. Przygotowanie raportu/sprawozdania = 10 godz. Konsultacje: 10
Literatura podstawowa
1. Zaczyński D.: Poradnik autora prac seminaryjnych, dyplomowych i magisterskich, Wyd. Żak, Warszawa, 1995. 2. Opoka E.: Uwagi o pisaniu i redagowaniu prac dyplomowych na studiach technicznych, wyd. 2, Wyd. Politechnika Śląska Gliwice, 2001.
Nazwa przedmiotu: Seminarium specjalistyczne Kod przedmiotu: 11.9-WE-AIR-SS-D17_S2S
Język: polski
Odpowiedzialny za przedmiot: prof. dr hab. inż. Józef Korbicz
Prowadzący przedmiot: prof. dr hab. inż. Józef Korbicz
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
projekt 45 3 3 zal. na ocenę 3 stacjonarne obowiązkowy
projekt 27 3 3 zal. na ocenę 3 niestacjonarne obowiązkowy
Cel przedmiotu
Realizacja pracy dyplomowej magisterskiej pod kierunkiem promotora.
Zakres tematyczny
Przygotowanie pracy dyplomowej pod kierunkiem promotora. Wykazanie znajomości przedmiotu, opanowanie literatury naukowej w zakresie opracowywanego tematu. Umiejętność korzystania ze źródeł oraz powiązania problematyki teoretycznej
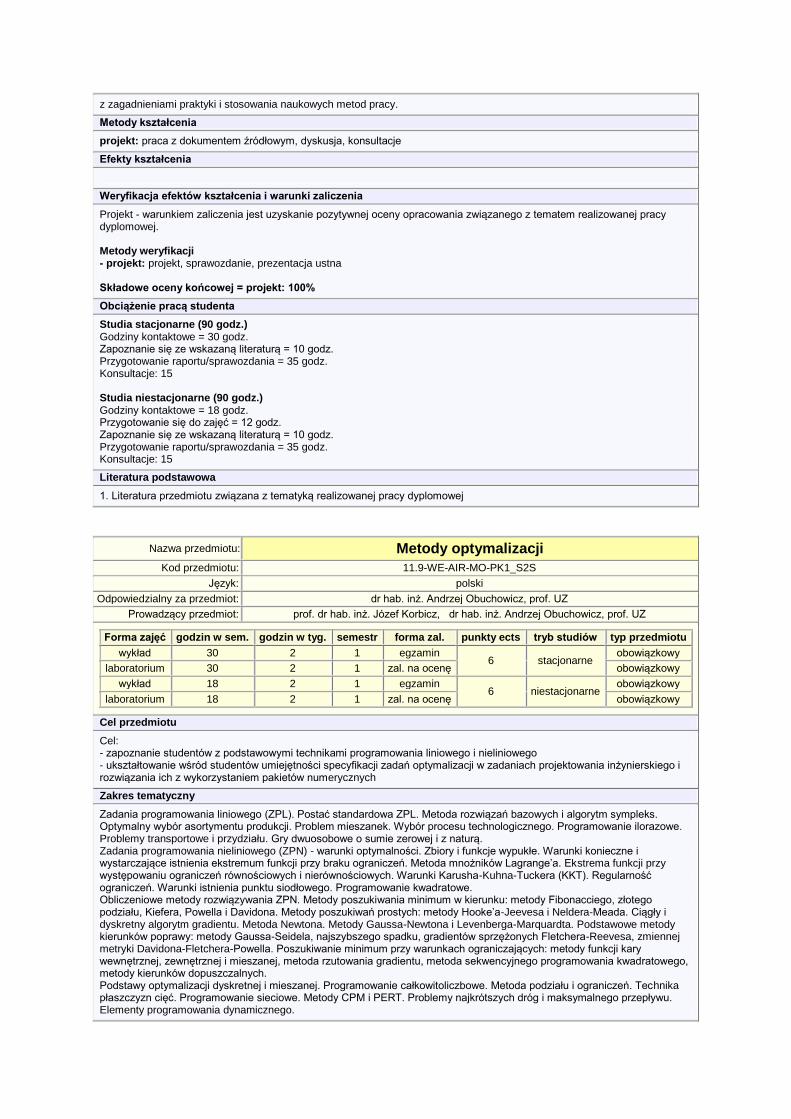
z zagadnieniami praktyki i stosowania naukowych metod pracy.
Metody kształcenia
projekt: praca z dokumentem źródłowym, dyskusja, konsultacje
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej oceny opracowania związanego z tematem realizowanej pracy dyplomowej. Metody weryfikacji - projekt: projekt, sprawozdanie, prezentacja ustna Składowe oceny końcowej = projekt: 100%
Obciążenie pracą studenta
Studia stacjonarne (90 godz.) Godziny kontaktowe = 30 godz. Zapoznanie się ze wskazaną literaturą = 10 godz. Przygotowanie raportu/sprawozdania = 35 godz. Konsultacje: 15 Studia niestacjonarne (90 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 10 godz. Przygotowanie raportu/sprawozdania = 35 godz. Konsultacje: 15
Literatura podstawowa
1. Literatura przedmiotu związana z tematyką realizowanej pracy dyplomowej
Nazwa przedmiotu: Metody optymalizacji Kod przedmiotu: 11.9-WE-AIR-MO-PK1_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Andrzej Obuchowicz, prof. UZ
Prowadzący przedmiot: prof. dr hab. inż. Józef Korbicz, dr hab. inż. Andrzej Obuchowicz, prof. UZ
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 1 egzamin 6 stacjonarne
obowiązkowy
laboratorium 30 2 1 zal. na ocenę obowiązkowy
wykład 18 2 1 egzamin 6 niestacjonarne
obowiązkowy
laboratorium 18 2 1 zal. na ocenę obowiązkowy
Cel przedmiotu
Cel: - zapoznanie studentów z podstawowymi technikami programowania liniowego i nieliniowego - ukształtowanie wśród studentów umiejętności specyfikacji zadań optymalizacji w zadaniach projektowania inżynierskiego i rozwiązania ich z wykorzystaniem pakietów numerycznych
Zakres tematyczny
Zadania programowania liniowego (ZPL). Postać standardowa ZPL. Metoda rozwiązań bazowych i algorytm sympleks. Optymalny wybór asortymentu produkcji. Problem mieszanek. Wybór procesu technologicznego. Programowanie ilorazowe. Problemy transportowe i przydziału. Gry dwuosobowe o sumie zerowej i z naturą. Zadania programowania nieliniowego (ZPN) - warunki optymalności. Zbiory i funkcje wypukłe. Warunki konieczne i wystarczające istnienia ekstremum funkcji przy braku ograniczeń. Metoda mnożników Lagrange’a. Ekstrema funkcji przy występowaniu ograniczeń równościowych i nierównościowych. Warunki Karusha-Kuhna-Tuckera (KKT). Regularność ograniczeń. Warunki istnienia punktu siodłowego. Programowanie kwadratowe. Obliczeniowe metody rozwiązywania ZPN. Metody poszukiwania minimum w kierunku: metody Fibonacciego, złotego podziału, Kiefera, Powella i Davidona. Metody poszukiwań prostych: metody Hooke’a-Jeevesa i Neldera-Meada. Ciągły i dyskretny algorytm gradientu. Metoda Newtona. Metody Gaussa-Newtona i Levenberga-Marquardta. Podstawowe metody kierunków poprawy: metody Gaussa-Seidela, najszybszego spadku, gradientów sprzężonych Fletchera-Reevesa, zmiennej metryki Davidona-Fletchera-Powella. Poszukiwanie minimum przy warunkach ograniczających: metody funkcji kary wewnętrznej, zewnętrznej i mieszanej, metoda rzutowania gradientu, metoda sekwencyjnego programowania kwadratowego, metody kierunków dopuszczalnych. Podstawy optymalizacji dyskretnej i mieszanej. Programowanie całkowitoliczbowe. Metoda podziału i ograniczeń. Technika płaszczyzn cięć. Programowanie sieciowe. Metody CPM i PERT. Problemy najkrótszych dróg i maksymalnego przepływu. Elementy programowania dynamicznego.
Optymalizacja globalna. Optymalizacja stochastyczna. Adaptacyjne przeszukiwanie losowe. Algorytm symulowanego wyżarzania. Techniki Monte-Carlo i łańcuchy Markowa. Algorytmy ewolucyjne i genetyczne. Zagadnienia praktyczne. Upraszczanie i eliminacja ograniczeń. Eliminacja nieciągłości. Skalowanie zadania. Numeryczne przybliżanie gradientu. Wykorzystanie procedur bibliotecznych. Przegląd wybranych bibliotek procedur optymalizacyjnych. Omówienie metod zaimplementowanych w popularnych systemach przetwarzania numerycznego i symbolicznego.
Metody kształcenia
wykład: wykład problemowy, wykład konwencjonalny laboratorium: ćwiczenia, ćwiczenia laboratoryjne
Efekty kształcenia
Jest w stanie wskazać efektywną metodę optymalizacji dla konkretnego problemu. K2A_W02 T2A_W01, T2A_W03
Potrafi wykorzystać środowiska numeryczne (Matlab, Maple) do wyznaczania rozwiązań optymalnych problemów złożonych.
K2A_W02 T2A_W01, T2A_W03
Umie wyjaśnić działanie iteracyjnych algorytmów optymalizacji K2A_W02 T2A_W01, T2A_W03
Potrafi wyznaczyć rozwiązania optymalne dla zadań programowania liniowego, wypukłego i wybranych klas zadań optymalizacji dyskretnej
K2A_W02 T2A_W01, T2A_W03
Umie formułować zadania optymalizacji na podstawie tekstowego opisu problemu technicznego, technologicznego czy logistycznego
K2A_W02 T2A_W01, T2A_W03
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej i ustnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: egzamin w formie pisemnej - laboratorium: sprawozdanie, sprawdzian, kolokwium Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 30 godz. Wykonanie zadań zleconych przez prowadzącego = 30 godz. Przygotowanie się do egzaminu = 20 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 30 godz. Wykonanie zadań zleconych przez prowadzącego = 30 godz. Zajęcia realizowane na odległość = 24 godz. Przygotowanie się do egzaminu = 20 godz.
Literatura podstawowa
1. Kukuła K.(red.): Badania operacyjne w przykładach i zadaniach, PWN, Warszawa, 2006 2. Bertsekas D.: Nonlinear programming, Athena Scientific, 2004 3. Ignasiak E.(red.): Badania operacyjne, PWN, Warszawa, 2001 4. Kusiak J., Danielewska-Tułecka A., Oprocha P.: Optymalizacja. Wybrane metody z przykładami zastosowań, PWN, 2009
Literatura uzupełniająca
1. Bertsekas D.: Convex Analysis and Optimization, Athena Scientific, 2003 2. Spall J.: Intoduction to Stochastic Search and Optimization: Estimation, Simulation and Control, Wiley InterScience, 2003
Nazwa przedmiotu: Modelowanie i identyfikacja Kod przedmiotu: 11.9-WE-AIR-MII-PK2_S2S
Język: polski
Odpowiedzialny za przedmiot:
dr hab. inż. Andrzej Janczak, prof. UZ
Prowadzący przedmiot: dr hab. inż. Andrzej Janczak, prof. UZ
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 1 egzamin 6 stacjonarne obowiązkowy
laboratorium 30 2 1 zal. na ocenę obowiązkowy
wykład 18 2 1 egzamin 6 niestacjonarne
obowiązkowy
laboratorium 18 2 1 zal. na ocenę obowiązkowy
Cel przedmiotu
- zapoznanie studentów z podstawowymi konstruowania modeli na podstawie wiedzy strukturalnej i pomiarów - ukształtowanie podstawowych umiejętności w zakresie stosowania nieparametrycznych metod identyfikacji - ukształtowanie podstawowych umiejętności w zakresie stosowania parametrycznych metod identyfikacji
Zakres tematyczny
Wprowadzenie. Obiekty i modele, zastosowania modeli. Identyfikacja systemów i modelowanie matematyczne. Równoważność modeli, kryteria równoważności modeli. Estymacja parametrów. Definicje błędu identyfikacji. Konstruowanie modeli na podstawie wiedzy strukturalnej i pomiarów. Algorytm identyfikacji systemu. Nieparametryczne metody identyfikacji. Analiza przebiegów przejściowych. Metody częstotliwościowe. Metody korelacyjne. Analiza widmowa. Metoda najmniejszych kwadratów. Statyczny model liniowy. Zadanie minimalizacji sumy kwadratów błędów. Rozwiązanie równania normalnego. Analiza estymatora metody najmniejszych kwadratów. Najlepszy liniowy estymator nieobciążony. Przedziały ufności ocen parametrów. Złożoność modeli. Triangularyzacja ortogonalna. Algorytm rekurencyjny. Modele systemów dynamicznych. Klasyfikacja modeli. Ogólna struktura modelu liniowego. Modele AR, MA, ARMA, FIR, ARX, ARMAX, OE, model Boxa-Jenkinsa. Modele systemów o wielu wejściach i wielu wyjściach. Modele nieliniowe. Modele Wienera i Hammersteina. Modele Volterry i Kolmogorova-Gabora. Modele w przestrzeni stanów. Wybór struktury modelu. Sygnały wejściowe. Charakterystyki sygnałów deterministycznych. Charakterystyki sygnałów stochastycznych. Sygnały wejściowe stosowane w zadaniach identyfikacji. Warunek trwałego pobudzania. Metoda błędu predykcji. Symulacja i predykcja. Predyktory optymalne. Estymacja parametrów modelu ARX metodą najmniejszych kwadratów. Estymacja parametrów metodą błędu predykcji. Problem zgodności ocen parametrów. Metoda zmiennych instrumentalnych. Algorytm identyfikacji metodą zmiennych instrumentalnych. Wybór zmiennych instrumentalnych. Rekurencyjne metody estymacji parametrów. Ogólna charakterystyka rekurencyjnych algorytmów identyfikacji. Rekurencyjna metoda najmniejszych kwadratów. Zapominanie wykładnicze. Rekurencyjna metoda zmiennych instrumentalnych. Rekurencyjna metoda błędu predykcji. Adaptacja parametrów regulatora samonastrajającego. Identyfikacja systemów w układzie zamkniętym. Warunki identyfikowalności systemów objętych sprzężeniem zwrotnym. Metody bezpośrednie. Metody pośrednie. Wpływ sprzężenia zwrotnego na dokładność estymacji. Identyfikacja systemów metodami podprzestrzeni. Modele systemu deterministycznego i systemu stochastycznego w przestrzeni stanów. Identyfikacja systemu deterministycznego. Identyfikacja systemu stochastycznego.
Metody kształcenia
wykład: symulacja, ćwiczenia laboratoryjne, wykład konwencjonalny laboratorium: symulacja, ćwiczenia laboratoryjne
Efekty kształcenia
Potrafi konstruować modele dynamicznych systemów liniowych, stosując metodę zmiennych instrumentalnych
K2A_U08 T2A_U11
Potrafi konstruować modele dynamicznych systemów liniowych, stosując metodę błędu predykcji
K2A_U08 T2A_U11
Potrafi konstruować modele systemów liniowych, stosując metodę najmniejszych kwadratów K2A_U08 T2A_U11
Potrafi konstruować modele systemów, stosując analizę przebiegów przejściowych K2A_U08 T2A_U11
Zna zasady modelowania nieliniowej statyki i dynamiki z wykorzystaniem sieci neuronowych i systemów rozmytych
K2A_W03 T2A_W01, T2A_W03
Zna definicje zadania identyfikacji systemów, modelowania matematycznego i ogólny algorytm identyfikacji systemu
K2A_W03 T2A_W01, T2A_W03
Zna zasady identyfikacji modeli statycznych systemów liniowych metodę najmniejszych kwadratów
K2A_W03 T2A_W01, T2A_W03
Zna klasyfikację modeli systemów dynamicznych, ogólną strukturę modelu liniowego, modele AR, MA, ARMA, FIR, ARX, ARMAX, OE i model Boxa-Jenkinsa
K2A_W03 T2A_W01, T2A_W03
Zna zasady identyfikacji modeli dynamicznych systemów liniowych metodą najmniejszych kwadratów
K2A_W03 T2A_W01, T2A_W03
Zna zasady identyfikacji modeli dynamicznych systemów liniowych metodą błędu predykcji K2A_W03 T2A_W01, T2A_W03
Zna zasady identyfikacji modeli dynamicznych systemów liniowych metodą zmiennych instrumentalnych
K2A_W03 T2A_W01, T2A_W03
Zna zasady identyfikacji modeli dynamicznych systemów liniowych metodami rekurencyjnymi
K2A_W03 T2A_W01, T2A_W03
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej i ustnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: sprawozdanie, sprawdzian, egzamin w formie pisemnej
- laboratorium: sprawozdanie, sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 36 godz. Wykonanie zadań zleconych przez prowadzącego = 4 godz. Przygotowanie się do egzaminu = 40 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 32 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 30 godz. Wykonanie zadań zleconych przez prowadzącego = 10 godz. Przygotowanie się do egzaminu = 48 godz.
Literatura podstawowa
1. E. Bielinska, J. Figwer, J. Kasprzyk, T. Legierski, Z. Ogonowski, M. Pawełczyk, Identyfikacja procesów. Praca zbiorowa pod red. J. Kasprzyka. Wyd. Politechniki Slaskiej, Gliwice, 2002 2. K. Janiszowski, Identyfikacja modeli parametrycznych w przykładach. Wyd. EXIT, Warszawa, 2002 3. L. Ljung, System identification. Theory for the User. Prentice Hall, Upper Saddle River, 1999 4. O. Nelles, Nonlinear System Identification. From Classical Approaches to Neural Networks and Fuzzy models. Springer, New York, Berlin, Heidelberg, 2001 5. T. Söderström, P. Stoica, Identyfikacja systemów. Wydawnictwo Naukowe PWN, Warszawa, 1997
Literatura uzupełniająca
1. M. Norgaard, O. Ravn, N.K. Poulsen, L.K. Hansen, Neural Networks for Modelling and Control of Dynamic Systems. Springer, London, 2000
Nazwa przedmiotu: Układy wykonawcze automatyki Kod przedmiotu: 11.9-WE-AIR-UWA-PK4_S2S
Język: polski
Odpowiedzialni za przedmiot: prof. dr hab. inż. Igor Korotyeyev, dr inż. Jacek Kaniewski
Prowadzący przedmiot: prof. dr hab. inż. Igor Korotyeyev, dr inż. Jacek Kaniewski,
dr inż. Paweł Szcześniak
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 1 zal. na ocenę 6 stacjonarne
obowiązkowy
laboratorium 30 2 1 zal. na ocenę obowiązkowy
wykład 18 2 1 zal. na ocenę 6 niestacjonarne
obowiązkowy
laboratorium 18 2 1 zal. na ocenę obowiązkowy
Cel przedmiotu
Cel: - zapoznanie studentów z podstawowymi pneumatycznymi, hydraulicznymi i elektromechanicznymi układami wykonawczymi automatyki - zapoznanie studentów z zagadnieniami dotyczącymi automatyzacji systemów - ukształtowanie wiedzy z zakresu układów wykonawczych w systemach automatycznych
Zakres tematyczny
Wprowadzenie. Zadania realizowane przez urządzenia wykonawcze w systemach automatyki. Nośniki energii wykorzystywane w urządzeniach wykonawczych. Sygnały w systemach automatyki. Przykłady zastosowań urządzeń wykonawczych w automatyce. Pneumatyczne urządzenia wykonawcze. Fizyczne właściwości gazów. Sprężone powietrze - wytwarzanie i rozprowadzanie. Elementy pneumatycznych układów automatyki. Budowa i podstawowe właściwości napędów pneumatycznych. Schematy układów pneumatycznych. Komputerowo wspomagane projektowanie układów pneumatycznych. Przykłady zastosowania pneumatycznych urządzeń wykonawczych w automatyce. Hydrauliczne urządzenia wykonawcze. Budowa, zasada działania i podstawowe właściwości hydraulicznych urządzeń wykonawczych. Opis matematyczny właściwości zespołów funkcjonalnych i układów hydraulicznych. Część zasilająca, sterująca i wykonawcza układów hydraulicznych. Symbole graficzne podstawowych zespołów funkcjonalnych układów hydraulicznych. Przykłady zastosowania hydraulicznych urządzeń wykonawczych w automatyce. Elektryczne urządzenia wykonawcze. Maszyny elektryczne stosowane w automatyce jako urządzenia wykonawcze. Układy zasilania silników wykonawczych. Regulacja położenia, prędkości i momentu w elektrycznych układach napędowych. Napędy prądu stałego, prądu zmiennego, napędy z silnikami bezszczotkowymi oraz silnikami krokowymi w automatyce. Urządzenia wykonawcze w elektrotermii. Przykłady zastosowania elektrycznych i elektropneumatycznych urządzeń wykonawczych w
automatyce Zastosowania urządzeń wykonawczych w automatyce. Urządzenia sterujące w układach automatyki. Przykłady układów automatyki z pneumatycznymi, hydraulicznymi, elektrycznymi oraz elektropneumatycznymi urządzeniami wykonawczymi.
Metody kształcenia
wykład: wykład problemowy, wykład konwencjonalny laboratorium: zajęcia praktyczne, ćwiczenia laboratoryjne
Efekty kształcenia
Potrafi pracować indywidualnie i w zespole K2A_U13 T2A_U08, T2A_U09,
T2A_U15
Potrafi posługiwać się układami wykonawczymi automatyki K2A_U13 T2A_U08, T2A_U09,
T2A_U15
ma wiedzę z zakresu pneumatycznych, hydraulicznych i elektromechanicznych układów automatyki
K2A_W09 T2A_W04, T2A_W05
zna zagadnienia dotyczące podstawowych układów wykonawczych w typowych systemach automatyki
K2A_W09 T2A_W04, T2A_W05
zna podstawy teoretyczne dotyczące układów wykonawczych oraz ich zastosowania w układach automatyki
K2A_W09 T2A_W04, T2A_W05
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z kolokwiów pisemnych lub ustnych przeprowadzonych co najmniej raz w semestrze. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze wszystkich ćwiczeń laboratoryjnych, przewidzianych do realizacji w ramach programu laboratorium. Metody weryfikacji - wykład: prezentacja ustna, kolokwium - laboratorium: sprawozdanie, prezentacja ustna, sprawdzian Składowe oceny końcowej = wykład: 60% + laboratorium: 40%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 30 godz. Przygotowanie raportu/sprawozdania = 10 godz. Wykonanie zadań zleconych przez prowadzącego = 20 godz. Zajęcia realizowane na odległość = 20 godz. Przygotowanie do kolokwium: 20 Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 39 godz. Zapoznanie się ze wskazaną literaturą = 37 godz. Przygotowanie raportu/sprawozdania = 29 godz. Wykonanie zadań zleconych przez prowadzącego = 29 godz. Przygotowanie: 10
Literatura podstawowa
1. Z. Zajda, L. Żebrowski, Urządzenia i układy automatyki, Wydawnictwo Politechniki Wrocławskiej, Wrocław, 1993 2. J. Bednarczyk, Elektryczne elementy automatyki, AGH, Kraków, 1988 3. J. Honczarenko, Roboty przemysłowe. Budowa i zastosowanie. WNT, Warszawa, 2004 4. Pizoń, Elektrohydrauliczne analogowe i cyfrowe układy automatyki. WNT, Warszawa, 1995 5. M. Hering, Podstawy elektrotermii. Część I i II, Warszawa, WNT, 1992, 1998
Literatura uzupełniająca
1. B. Chorowski, M. Werszko, Mechaniczne urządzenia automatyki, Warszawa, WNT 2. P. Osiecka, Hydrostatyczny napęd maszyn, Warszawa, WNT, 2004 3. T. Legierski, J. Kasprzyk, J. Wyrwał, J. Hajda, Programowanie sterowników PLC, Wydawnictwo Pracowni Komputerowej Jacka Skalmierskiego, Gliwice, 1998
Nazwa przedmiotu: Sensoryka i pomiary przemysłowe Kod przedmiotu: 06.0-WE-AIR-SIPP-PK5_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Ryszard Rybski, prof. UZ
Prowadzący przedmiot: dr hab. inż. Ryszard Rybski, prof. UZ
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 1 zal. na ocenę 6 stacjonarne
obowiązkowy
laboratorium 30 2 1 zal. na ocenę obowiązkowy
wykład 18 2 1 zal. na ocenę 6 niestacjonarne
obowiązkowy
laboratorium 18 2 1 zal. na ocenę obowiązkowy
Cel przedmiotu
- zapoznanie studentów z parametrami czujników pomiarowych oraz metodami opisu ich właściwości statycznych i dynamicznych - zapoznanie studentów z podstawowymi blokami funkcjonalnymi torów przetwarzania sygnałów pomiarowych - zapoznanie studentów z budowa, zasadą działania i właściwościami przetworników pomiarowych wielkości nieelektrycznych oraz obszarami ich zastosowań - uświadomienie studentom wymagań stawianych czujnikom i przetwornikom pomiarowych
Zakres tematyczny
Wprowadzenie. Właściwości metrologiczne czujników pomiarowych. Klasyfikacja czujników. Technologie wytwarzania czujników. Czujniki i przetworniki w systemie pomiarowym. Przetworniki analogowe, analogowo-cyfrowe i cyfrowo-analogowe. Przesyłanie sygnałów wyjściowych czujników. Interfejsy czujników i przetworników pomiarowych. Czujniki inteligentne. Bezprzewodowe sieci sensorowe. Pomiary temperatury. Termometry rezystancyjne. Termometry termoelektryczne. Półprzewodnikowe czujniki temperatury. Pirometry. Termometry szumowe. Termometry światłowodowe. Pomiary ciśnienia. Czujniki piezorezystancyjne. Korekcja błędów czujników piezorezystancyjnych. Czujniki tensometryczne. Czujniki pojemnościowe. Pomiary poziomu. Poziomomierze pływakowe, hydrostatyczne i pojemnościowe. Zastosowanie ultradźwięków w pomiarach poziomu. Pomiary prędkości i przepływu płynów. Pomiary prędkości płynów metodą anemometryczną. Pomiar prędkości na zasadzie Dopplera. Przepływomierze zwężkowe. Rotametry. Przepływomierze turbinowe. Przepływomierze Coriolisa. Przepływomierze ultradźwiękowe. Przepływomierze elektromagnetyczne. Liczniki objętości płynów. Pomiary przemieszczeń. Czujniki indukcyjnościowe i pojemnościowe przemieszczenia. Czujniki zbliżeniowe. Optoelektroniczne czujniki przemieszczenia. Zastosowanie przetworników ultradźwiękowych do pomiaru przemieszczeń. Pomiary parametrów ruchu. Pomiary prędkości obrotowej. Pomiary drgań i wstrząsów. Akcelerometry piezoelektryczne. Akcelerometry pojemnościowe. Akcelerometry pojemnościowe. Pomiary siły i masy. Tensometryczne czujniki siły. Układy pomiarowe z tensometrycznymi czujnikami siły. Piezoelektryczne czujniki siły. Pomiary wilgotności. Pomiary wilgotności powietrza: higrometr psychrometryczny, higrometr punktu rosy, impedancyjne czujniki wilgotności. Pomiary wilgotności ciał stałych: metody impedancyjne, metody spektrometryczne.
Metody kształcenia
wykład: ćwiczenia laboratoryjne, wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne
Efekty kształcenia
Jest świadomy wymagań stawianych sensorom w pomiarach przemysłowych K2A_W14 T2A_W02, T2A_W07
Potrafi zaplanować i przeprowadzić pomiary charakterystyk sensorów, przetworników pomiarowych i elementów toru przetwarzania sygnałów pomiarowych
K2A_U18 T2A_U08
Umie objaśnić zasadę działania czujników pomiarowych podstawowych wielkości nieelektrycznych oraz potrafi wskazywać - posługując się przykładami - najważniejsze
obszary ich zastosowań. K2A_W14
T2A_W02, T2A_W07
Student zna parametry oraz metody stosowane do opisu i oceny właściwości statycznych i dynamicznych czujników pomiarowych
K2A_W14 T2A_W02, T2A_W07
Potrafi wymienić podstawowe bloki funkcjonalne współczesnego toru przetwarzania sygnałów pomiarowych.
K2A_W14 T2A_W02, T2A_W07
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium przeprowadzonego w formie pisemnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: sprawozdanie, test w formie pisemnej - laboratorium: sprawozdanie Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz.
Zajęcia realizowane na odległość = 12 godz. Przygotowanie się do kolokwiów: 12 Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 29 godz. Zapoznanie się ze wskazaną literaturą = 29 godz. Przygotowanie raportu/sprawozdania = 29 godz. Wykonanie zadań zleconych przez prowadzącego = 29 godz. Zajęcia realizowane na odległość = 12 godz. Przygotowanie: 16
Literatura podstawowa
1. J. Piotrowski (red.), Pomiary. Czujniki i metody pomiarowe wybranych wielkości fizycznych i składu chemicznego, Wydawnictwa Naukowo-Techniczne, Warszawa, 2009 2. M. Miłek, Metrologia elektryczna wielkości nieelektrycznych, Oficyna Wydawnicza Uniwersytetu Zielonogórskiego, Zielona Góra, 2006 3. W. Nawrocki, Rozproszone systemy pomiarowe, Wydawnictwa Komunikacji I Łączności, Warszawa, 2006
Literatura uzupełniająca
1. S. Tumański, Technika pomiarowa. WNT, Warszawa, 2007 2. J. Zakrzewski, Czujniki i przetworniki pomiarowe. Podręcznik problemowy. Wydawnictwo Politechniki Śląskiej, Gliwice, 2004
Nazwa przedmiotu: Teoria sterowania Kod przedmiotu: 06.0-WE-AIR-TS-PK3_S2S
Język: polski
Odpowiedzialny za przedmiot:
dr inż. Wojciech Paszke
Prowadzący przedmiot: dr inż. Wojciech Paszke, prof. dr hab. inż. Dariusz Uciński
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 1 egzamin 6 stacjonarne
obowiązkowy
laboratorium 30 2 1 zal. na ocenę obowiązkowy
wykład 18 2 1 egzamin 6 niestacjonarne
obowiązkowy
laboratorium 18 2 1 zal. na ocenę obowiązkowy
Cel przedmiotu
Cel: - zapoznanie studentów z metodami analizy układów nieliniowych - ukształtowania wśród studentów zrozumienia różnych definicji stabilności - zapoznanie studentów z metodami formułowania i rozwiązywania problemów sterowania optymalnego
Wymagania wstępne
Analiza matematyczna, Algebra liniowa, Technika regulacji automatycznej, Sterowanie procesami ciągłymi
Zakres tematyczny
Wprowadzenie. Najczęściej spotykane układy nieliniowe. Reprezentacja w przestrzeni stanów. Punkt równowagi. Typowe zachowania układów nieliniowych. Cykle graniczne. Analiza dynamicznych właściwości układów nieliniowych za pomocą płaszczyzny fazowej. Układy nieliniowe drugiego rzędu; graficzna reprezentacja za pomocą portretu fazowego. Punkty osobliwe. Graficzne i numeryczne metody generowania portretu fazowego. Analiza stabilności układów liniowych z zastosowaniem portretu fazowego. Analiza stabilności układów nieliniowych z zastosowaniem portretu fazowego. Analiza stabilności. Różne definicje stabilności układów nieliniowych. Metoda linearyzacji Lapunowa. Bezpośrednia metoda Lapunowa. Analiza globalnej stabilności asymptotycznej. Twierdzenie La Salle'a. Stabilność układów nieliniowych o parametrach zmiennych w czasie. Twierdzenia o niestabilności. Kryteria stabilności absolutnej. Nieliniowość w sektorze. Kryteria Popowa i koła. Synteza regulatorów w oparciu o metodę Lapunowa. Funkcje opisujące. Definicja cyklu granicznego i charakterystyk. Twierdzenie o istnieniu. Definicja funkcji opisującej. Funkcja opisująca dla elementu z nasyceniem, przekaźnika, członu ze strefą martwą i histerezą. Analiza cyklu granicznego za pomocą funkcji opisującej. Analiza stabilności cyklu granicznego. Linearyzacja przez sprzężenie zwrotne. Podstawy matematyczne. Algebra Liego. Linearyzacja wejściowo-wyjściowa. Warunki linearyzowalności. Warunki sterowalności. Algorytm linearyzacji wejściowo-stanowej. Formy normalne. Dyfeomorfizm. Algorytm linearyzacji wejściowo-wyjściowej. Dynamika wewnętrzna. Układy nieliniowe asymptotycznie minimalnofazowe. Metoda backstepping. Ogólny opis regulatora. Wymagania. Opis metody. Charakterystyki regulatora.
Sterowanie ślizgowe. Ogólny opis. Powierzchnie przełączeń. Struktura regulatora ślizgowego. Problem szarpania. Sterowanie optymalne. Zadania ciągłego i dyskretnego sterowania optymalnego. Wykorzystanie rachunku wariacyjnego do optymalizacji sterowania. Zasada maksimum dla stanu końcowego swobodnego i danego czasu końcowego. Zakres zastosowań zasady maksimum. Wariant dla problemu ze swobodnym stanem końcowym i swobodnym czasem końcowym. Wariant dla problemu z ustalonym czasem końcowym i ogólnym warunkami brzegowymi. Problem sterowania minimalno-czasowego. Zależność hamiltonianu od sterowania ekstremalnego. Zasada maksimum z ograniczeniami na stan. Sprowadzanie zadań sterowania optymalnego do programowania matematycznego. Programowanie dynamiczne. Optymalizacja układów liniowych niestacjonarnych przy kwadratowych funkcjonałach jakości. Rozwiązywanie równania różniczkowego Riccatiego. Problem liniowo-kwadratowy z czasem nieskończonym. Algebraiczne równanie Riccatiego. Regulacja predykcyjna. Zadanie regulacji predykcyjnej. Odpowiedź swobodna i wymuszona. Regulator DMC analityczny. Uwzględnianie ograniczeń sterowania w algorytmie analitycznym
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: ćwiczenia rachunkowe, ćwiczenia laboratoryjne
Efekty kształcenia
Potrafi sprowadzić zadanie sterowania optymalnego do problemu programowania matematycznego.
K2A_W04, K2A_U09
T2A_W01, T2A_W03, T2A_U10
Potrafi rozwiązać wybrane zadania ciągłego i dyskretnego sterowania optymalnego.
K2A_U09 T2A_U10
Zna metody linearyzacji układu nieliniowego, w szczególności z użyciem metody przez sprzężenie zwrotne.
K2A_W04, K2A_U04
T2A_W01, T2A_W03, T2A_U15, T2A_U18
Potrafi dokonać analizy stabilności oraz syntezy sterownika w oparciu o metody Lapunowa.
K2A_U07 T2A_U09
Potrafi wykonać analizę cyklu granicznego za pomocą funkcji opisującej K2A_W04, K2A_U07
T2A_W01, T2A_W03, T2A_U09
Ma wiedzę o podstawowych metodach analizy stabilności układów nieliniowych
K2A_W04 T2A_W01, T2A_W03
Rozumie wpływ nieliniowości na charakterystyki statyczne i dynamiczne ukałdów
K2A_W04 T2A_W01, T2A_W03
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład – warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej lub ustnej. Laboratorium – warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: egzamin w formie pisemnej - laboratorium: sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 20 godz. Wykonanie zadań zleconych przez prowadzącego = 20 godz. Zajęcia realizowane na odległość = 20 godz. Przygotowanie się do egzaminu = 20 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz. Zajęcia realizowane na odległość = 24 godz. Przygotowanie się do egzaminu = 24 godz.
Literatura podstawowa
T. Kaczorek, A. Dzieliński, W. Dąbrowski, Podstawy teorii sterowania, Wydawnictwa Naukowo-Techniczne, Warszawa, 2006 H. Górecki, Optymalizacja systemów dynamicznych, Wydawnictwo Naukowe PWN, Warszawa, 1993 P. Tatjewski: Zaawansowane sterowanie obiektów przemysłowych, struktury i algorytmy, EXIT, Warszawa 2002.
K.J. Åström, R.M. Murray, Feedback Systems: An Introduction for Scientists and Engineers, Princeton University Press, Princeton, 2009 Stanisław H. Żak, Systems and Control, Oxford University Press, New York, 2003
Literatura uzupełniająca
R.F. Stengel, Optimal Control and Estimation, Dover Publications, Mineola, N.Y., 1994 M.W. Spong, S. Hutchinson, M. Vidyasagar, Robot Modeling and Control, Wiley, Hoboken, NJ, 2006
Nazwa przedmiotu: Seminarium dyplomowe I Kod przedmiotu: 11.9-WE-AIR-SD1-D18_S2S
Język: polski
Odpowiedzialny za przedmiot: prof. dr hab. inż. Dariusz Uciński
Prowadzący przedmiot: prof. dr hab. inż. Dariusz Uciński
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
projekt 15 1 2 zal. na ocenę 4 stacjonarne obowiązkowy
projekt 9 1 2 zal. na ocenę 4 niestacjonarne obowiązkowy
Cel przedmiotu
Ćwiczenie umiejętności prezentowania i dyskutowania wyników pracy dyplomowej magisterskiej.
Zakres tematyczny
W ramach Seminarium dyplomowego I studenci na forum grupy seminaryjnej przedstawiają, w formie prezentacji komputerowej częściowe efekty realizowanej pracy dyplomowej. Każda prezentacja kończy się dyskusją, w której czynny udział bierze grupa seminaryjna. Dopuszcza się opracowanie i przedstawianie prezentacji w języku angielskim.
Metody kształcenia
projekt: praca z dokumentem źródłowym, dyskusja
Efekty kształcenia
Potrafi integrować uzyskane informacje, dokonywać ich interpretacji i krytycznej oceny, a także wyciągać wnioski oraz formułować i wyczerpująco
uzasadniać opinie.
K2A_W16, K2A_U02
T2A_W10, T2A_W11, T2A_U03, T2A_U04,
T2A_U06
Student potrafi pozyskać informacje z literatury, baz danych oraz innych źródeł także w języku angielskim.
K2A_K01 T2A_K01
Weryfikacja efektów kształcenia i warunki zaliczenia
Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej oceny zrealizowanej części pracy dyplomowej. Metody weryfikacji - projekt: sprawozdanie, prezentacja ustna Składowe oceny końcowej = projekt: 100%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 30 godz. Zapoznanie się ze wskazaną literaturą = 45 godz. Przygotowanie raportu/sprawozdania = 75 godz. Wykonanie zadań zleconych przez prowadzącego = 15 godz. Konsultacje: 15 Studia niestacjonarne (180 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 45 godz. Przygotowanie raportu/sprawozdania = 75 godz. Wykonanie zadań zleconych przez prowadzącego = 15 godz. Konsultacje: 15
Literatura podstawowa
1. Literatura przedmiotu związana z tematyką realizowanej pracy dyplomowej
Nazwa przedmiotu: Seminarium dyplomowe II Kod przedmiotu: 11.9-WE-AIR-SD2-D19_S2S
Język: polski
Odpowiedzialny za przedmiot: prof. dr hab. inż. Dariusz Uciński
Prowadzący przedmiot: prof. dr hab. inż. Dariusz Uciński
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
projekt 30 2 3 zal. na ocenę 7 stacjonarne obowiązkowy
projekt 18 2 3 zal. na ocenę 7 niestacjonarne obowiązkowy
Cel przedmiotu
Doskonalenie umiejętności prezentowania i dyskutowania wyników pracy dyplomowej magisterskiej.
Wymagania wstępne
Seminarium dyplomowe I
Zakres tematyczny
W ramach Seminarium dyplomowego II studenci na forum grupy seminaryjnej przedstawiają, w formie prezentacji komputerowej końcowe efekty realizowanej pracy dyplomowej. Każda prezentacja kończy się dyskusją, w której czynny udział bierze grupa seminaryjna. Dopuszcza się opracowanie i przedstawianie prezentacji w języku angielskim.
Metody kształcenia
projekt: dyskusja
Efekty kształcenia
Potrafi biegle porozumiewać się przy użyciu różnych technik w środowisku zawodowym. K2A_W18 T2A_W09, T2A_W11
Potrafi odpowiednio określić priorytety służące realizacji określonego celu. K2A_K02 T2A_K02, T2A_K05
Posiada umiejętność wystąpień ustnych dotyczących zagadnień szczegółowych z dyscypliny Automatyka i robotyka.
K2A_K06 T2A_K07
Weryfikacja efektów kształcenia i warunki zaliczenia
Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej prezentacji wyników pracy dyplomowej. Metody weryfikacji - projekt: sprawozdanie, prezentacja ustna Składowe oceny końcowej = projekt: 100%
Obciążenie pracą studenta
Studia stacjonarne (210 godz.) Godziny kontaktowe = 30 godz. Zapoznanie się ze wskazaną literaturą = 30 godz. Przygotowanie raportu/sprawozdania = 105 godz. Wykonanie zadań zleconych przez prowadzącego = 30 godz. Konsultacje: 15 Studia niestacjonarne (210 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 30 godz. Przygotowanie raportu/sprawozdania = 105 godz. Wykonanie zadań zleconych przez prowadzącego = 30 godz. Konsultacje: 15
Literatura podstawowa
1. Literatura przedmiotu związana z tematyką realizowanej pracy dyplomowej magisterskiej
Specjalność: Komputerowe Systemy Automatyki
Nazwa przedmiotu: Inteligentne metody sterowania Kod przedmiotu: 11.9-WE-AIR-ISS-PS6_S2S
Język: polski
Odpowiedzialny za przedmiot:
dr hab. inż. Marcin Witczak, prof. UZ
Prowadzący przedmiot: prof. dr hab. inż. Dariusz Uciński, dr inż. Wojciech Paszke
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 egzamin 6 stacjonarne obowiązkowy
laboratorium 30 2 2 zal. na ocenę obowiązkowy
wykład 18 2 2 egzamin 6 niestacjonarne
obowiązkowy
laboratorium 18 2 2 zal. na ocenę obowiązkowy
Cel przedmiotu
- zapoznanie studentów w technikami obliczeń inteligentnych: sztucznymi sieciami neuronowymi i logiką rozmytą - ukształtowanie umiejętności projektowania systemów sterowania za pomocą metod inteligentnych
Zakres tematyczny
Wprowadzenie do sztucznych sieci neuronowych: Właściwości sieci neuronowych, podstawowe topologie połączeń międzyneuronowych, metody uczenia, właściwości sztucznych sieci neuronowych, obszary zastosowań w automatyce i robotyce. Sieci jednokierunkowe wielowarstwowe: Budowa podstawowej jednostki przetwarzającej. Struktura sieci i jej zasada działania, algorytm wstecznej propagacji błędu i jego modyfikacje, pojęcie uogólniania wiedzy, regularyzacja. Zastosowanie sieci wielowarstwowych do zadania klasyfikacji. Sieci dynamiczne: Sieci jednokierunkowe z opóźnieniami, sieci rekurencyjne (sieć Williamsa-Zipsera) i sieci częściowo rekurencyjne (sieć Elmana). Modele szeregowo-równoległy i równoległy identyfikacji. Wprowadzenie do logiki rozmytej: Pojęcie zbioru rozmytego, proces rozmywania i wyostrzania. Baza reguł, generowanie bazy reguł. Model wnioskowania Mamdaniego i Takagi-Sugeno. Sterowanie z modelem odwrotnym: Analiza działania układu sterowania z modelem odwrotnym, warunki realizowalności. Proces budowy modelu odwrotnego systemu. Generowanie danych uczących na potrzeby modelowania odwrotnego. Synteza układu sterowania z neuronowym modelem odwrotnym. Realizacja neuronowego układu sterowania odwrotnego w środowisku Simulink. Sterowanie typu "feedforward": Analiza działania układu automatycznej regulacji z regulatorem typu PID wspomaganego sprzężeniem od sygnału zadanego. Analiza właściwości układu. Projektowanie neuronowego układu sterowania ze sprzężeniem od sygnału zadanego. Realizacja układu sterowania w środowisku Simulink. Sterowanie predykcyjne: Analiza działania układów sterowania predykcyjnego z modelem. Proces budowy predyktora wielokrokowego w oparciu o sztuczne sieci neuronowe. Wyznaczanie optymalnego ciągu sterowań jako proces optymalizacji funkcji kosztu. Synteza układu sterowania z neuronowym predyktorem. Realizacja neuronowego układu sterowania predykcyjnego w środowisku Simulink. Układy regulacji automatycznej z regulatorem rozmytym: Zasada działania regulatora rozmytego. Analogie pomiędzy regulatorem rozmytym, a regulatorem typu PID. Budowa bazy reguł na potrzeby układu sterowania. Synteza układu automatycznej regulacji z regulatorem rozmytym. Realizacja rozmytego regulatora w środowisku Simulink.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne
Efekty kształcenia
Ma świadomość dynamicznego rozwoju dziedziny. K2A_W06 T2A_W04, T2A_W05
Potrafi projektować i realizować nowoczesne systemy sterowania z zastosowaniem sztucznych sieci neuronowych i logiki rozmytej.
K2A_U12 T2A_U14, T2A_U15
Rozumie działanie technik obliczeń inteligentnych opartych o sztuczne sieci neuronowe i logikę rozmytą, a także jest świadomy ich użyteczności w sytuacjach gdy wykorzystanie klasycznych
technik regulacji nie daje oczekiwanych rezultatów K2A_W06
T2A_W04, T2A_W05
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej i ustnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia Metody weryfikacji - wykład: egzamin w formie pisemnej - laboratorium: sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 20 godz. Wykonanie zadań zleconych przez prowadzącego = 20 godz. Zajęcia realizowane na odległość = 20 godz. Przygotowanie się do egzaminu = 20 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz.
Wykonanie zadań zleconych przez prowadzącego = 24 godz. Zajęcia realizowane na odległość = 24 godz. Przygotowanie się do egzaminu = 24 godz.
Literatura podstawowa
1. J. Korbicz, A. Obuchowicz, D. Uciński D., Sieci neuronowe. Podstawy i zastosowania, Akademicka Oficyna Wydawnicza, PLJ, Warszawa, 1994 2. R. Rojek, K. Bartecki, J. Korniak, Zastosowanie sztucznych sieci neuronowych i logiki rozmytej w automatyce, Oficyna Wydawnicza Politechniki Opolskiej, Opole, 2000 3. R.R. Yager, D.P. Filev, Podstawy modelowania i sterowania rozmytego, WNT, Warszawa, 1995 4. M. Noorgard, O. Ravn, N.M. Poulsen, L.K. Hansen, Neural networks for Modelling and Control of Dynamic Systems, Springer-Verlag, Londyn, 2000
Nazwa przedmiotu: Systemy zdarzeniowe Kod przedmiotu: 11.9-WE-AIR-SZ-PS7_S2S
Język: polski
Odpowiedzialni za przedmiot: prof. dr hab. inż. Marian Adamski, dr hab. inż. Andrei Karatkevich
Prowadzący przedmiot: prof. dr hab. inż. Marian Adamski, dr inż. Grzegorz Andrzejewski
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 egzamin
6 stacjonarne
obowiązkowy
laboratorium 15 1 2 zal. na ocenę obowiązkowy
projekt 15 1 2 zal. na ocenę obowiązkowy
wykład 18 2 2 egzamin
6 niestacjonarne
obowiązkowy
laboratorium 9 1 2 zal. na ocenę obowiązkowy
projekt 9 1 2 zal. na ocenę obowiązkowy
Cel przedmiotu
Cel: - zapoznanie studentów ze sposobami formalnej specyfikacji systemów zdarzeniowych; - ukształtowanie podstaw teoretycznych, niezbędnych do zrozumienia sposobów projektowania, funkcjonowania oraz weryfikacji systemów zdarzeniowych.
Zakres tematyczny
Nieformalne wprowadzenie do systemów zdarzeniowych. Podstawy matematyczne. Elementy teorii automatów do formalnej specyfikacji systemów zdarzeniowych. Automat skończony jako model systemu zdarzeniowego. Automaty deterministyczne i niedeterministyczne. Wprowadzenie do logiki temporalnej. Struktura czasu – czas liniowy i rozgałęziony. Operatory i formuły logiki temporalnej. Logika LTL, CTL, CTL*. Intuicyjne przykłady specyfikacji prostych systemów zdarzeniowych w języku logiki temporalnej. Zdarzeniowe systemy reaktywne Ogólna koncepcja HCSFM. Realizacja synchroniczna systemów zdarzeniowych. Realizacja asynchroniczna systemów zdarzeniowych. Formalna weryfikacja specyfikacji systemów zdarzeniowych: Analiza systemu poprzez badanie specyfikacji, zadanej w logikach LTL i CTL. Własności typu „bezpieczeństwo” i „żywotność”. Kontr-przykłady. Metody „model checking”.. Zastosowanie narzędzia typu model checker (na przykładzie NuSMV). Przemysłowe formy specyfikowania i dokumentowania systemów reaktywnych. Wybrane elementy języka UML. Znormalizowane języki programowania sterowników logicznych PLC (norma 1131-3). Hierarchiczny diagram sterowania SFC.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: ćwiczenia rachunkowe, ćwiczenia laboratoryjne
Efekty kształcenia
W wystarczającym dla projektowania prostych układów sterujących stopniu zna podstawy teorii automatów
K2A_W12 T2A_W03, T2A_W06
Potrafi sporządzić specyfikację układu sterowania z wykorzystaniem języków projektowania sterowników logicznych (norma 1131-3)
K2A_W12 T2A_W03, T2A_W06
Umie zweryfikować zdarzeniowy układ sterowania, wykorzystując narzędzie typu model checker
K2A_U15 T2A_U09
Potrafi posługiwać się odpowiednim aparatem matematycznym w projektowaniu zdarzeniowych układów sterowania
K2A_W12 T2A_W03, T2A_W06
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej i ustnej
Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia Projekt - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z zadań projektowych wskazanych przez prowadzącego zajęcia Metody weryfikacji - wykład: sprawdzian, egzamin w formie pisemnej - laboratorium: sprawozdanie, sprawdzian, kolokwium - projekt: zadania projektowe Składowe oceny końcowej = wykład: 40% + laboratorium: 30% + projekt: 30%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 30 godz. Zapoznanie się ze wskazaną literaturą = 15 godz. Przygotowanie raportu/sprawozdania = 15 godz. Wykonanie zadań zleconych przez prowadzącego = 30 godz. Przygotowanie się do egzaminu = 15 godz. Konsultacje: 15 Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 45 godz. Zapoznanie się ze wskazaną literaturą = 18 godz. Przygotowanie raportu/sprawozdania = 30 godz. Wykonanie zadań zleconych przez prowadzącego = 36 godz. Konsultacje: 15
Literatura podstawowa
1. R. Klimek, Wprowadzenie do logiki temporalnej, AGH Uczelniane wydawnictwa naukowo-dydaktyczne, Kraków, 1999. 2. I. Grobelna, Weryfikacja modelowa z NuSMV, Oficyna Wydawnicza Uniwersytetu Zielonogórskiego, Zielona Góra, 2011. 3. J. Pecol Embedded Systems. A Contemporary Design Tool, Willey, 2008 4. C. Girault, R. Volk, Petri Nets for Systems Engineering. A Guide to Modeling, Verification and Applications, Springer Verlag, Berlin, 2003
Literatura uzupełniająca
1. Ch. Baier, J.-P. Katoen, Principles of Model Checking, MIT Press, 2008. 2. O. Grumberg, H. Veith (Eds.): 25 Years of Model Checking - History, Achievements, Perspectives. Lecture Notes in Computer Science 5000, Springer, 2008. 3. T.Kropf, Introduction to Formal Hardware Verification. Springer, Berlin, 1999 4. R. Cavada, A. Cimatti, G. Keighren, E. Olivetti, M. Pistore, M Roveri, NuSMV 2.5 Tutorial (http://nusmv.fbk.eu/NuSMV/tutorial/index.html)
Nazwa przedmiotu: Lokalizacja i nawigacja robotów Kod przedmiotu: 11.9-WE-AIR-LINR-PS8_S2S
Język: polski
Odpowiedzialny za przedmiot:
dr inż. Maciej Patan
Prowadzący przedmiot: prof. dr hab. inż. Dariusz Uciński, dr inż. Maciej Patan
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 egzamin 6 stacjonarne
obowiązkowy
laboratorium 30 2 2 zal. na ocenę obowiązkowy
wykład 18 2 2 egzamin 6 niestacjonarne
obowiązkowy
laboratorium 18 2 2 zal. na ocenę obowiązkowy
Cel przedmiotu
- ukształtowanie podstawowych umiejętności w zakresie formułowania i implementacji zadań lokalizacji oraz planowania ruchu robotów mobilnych, - zapoznanie studentów z metodami i technikami nawigowania robotami mobilnymi - nabycie umiejętności integrowania dostępnych systemów robota mobilnego
Zakres tematyczny
Wprowadzenie. Sposoby poruszania się robotów mobilnych. Roboty wyposażone w nogi oraz roboty jeżdżące na kołach. Sformułowanie podstawowych problemów. Przykłady i typowe aplikacje. Percepcja robota. Klasyfikacja czujników. Charakterystyka działania sensorów. Pomiary i ich niepewność. Propagacja błędu pomiarowego. Ekstrakcja cech. Algorytmy percepcyjne. Algorytmy wizyjne. Modele reprezentacji danych sensorycznych. Modele przestrzeni roboczej (modele rastrowe, geometryczne, topologiczne).
Kinematyka robotów mobilnych. Modele i ograniczenia kinematyki. Sterowność robota. Przestrzeń robocza i kontrola ruchu. Kinematyka członów wykonawczych (kamera, dalmierze laserowe, manipulatory, etc.). Lokalizacja robota mobilnego. Klasyfikacja metod. Podstawowe wyzwania w lokalizacji robotów mobilnych. Odometria. Lokalizacja w oparciu o mapę otoczenia. Metody lokalizacji probabilistycznej. Zastosowanie filtru Kalmana w lokalizacji. Systemy lokalizacji stosujące znaczniki otoczenia i globalne systemy pozycjonujące. Autonomiczne budowanie mapy otoczenia. Nawigacja. Planowanie trajektorii. Klasyfikacja metod planowania ruchu. Przegląd podstawowych technik planowania ruchu (grafy widoczności, dekompozycja przestrzeni roboczej, metody probabilistyczne, metody sztucznego potencjału etc.). Unikanie przeszkód nieruchomych i ruchomych. Optymalizacja ruchu robota. Sieci robotów mobilnych. Modele sieci robotów mobilnych. Systemy scentralizowane oraz wieloagentowe. Metody planowania ruchu wielu robotów. Koordynacja działań. Utrzymywanie spójności sieci, algorytmy randez-vous i optymalnego rozmieszczania robotów.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: praca w grupach, ćwiczenia laboratoryjne
Efekty kształcenia
Potrafi kreatywnie posługiwać się dedykowanym oprogramowaniem i dostępnymi bibliotekami numerycznymi w implementowaniu zadań nawigacji
K2A_U10 T2A_U08, T2A_U10
Potrafi wykorzystać algorytmiczne podejście do określania rozwiązań planowania ruchu dla roju robotów mobilnych
K2A_U10 T2A_U08, T2A_U10
Potrafi zastosować metody i algorytmy percepcji w oparciu o systemy sensoryczne robota
K2A_W06, K2A_U10
T2A_W04, T2A_W05, T2A_U08, T2A_U10
Zna i potrafi zastosować proste modele robotów mobilnych K2A_W06, K2A_U10
T2A_W04, T2A_W05, T2A_U08, T2A_U10
Rozumie cele i ograniczenia zadań nawigacji robotów mobilnych K2A_W06, K2A_W08
T2A_W04, T2A_W05, T2A_W06
Ma wiedzę w zakresie podstawowych systemów i typowych aplikacji robotyki mobilnej
K2A_W06, K2A_W08
T2A_W04, T2A_W05, T2A_W06
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z egzaminu przeprowadzonego w formie pisemnej i ustnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: egzamin w formie pisemnej - laboratorium: sprawozdanie, sprawdzian Składowe oceny końcowej = wykład: 60% + laboratorium: 40%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 20 godz. Zapoznanie się ze wskazaną literaturą = 20 godz. Przygotowanie raportu/sprawozdania = 20 godz. Wykonanie zadań zleconych przez prowadzącego = 20 godz. Zajęcia realizowane na odległość = 20 godz. Przygotowanie się do egzaminu = 20 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz. Zajęcia realizowane na odległość = 24 godz. Przygotowanie się do egzaminu = 24 godz.
Literatura podstawowa
1. M. J. Giergiel, Z. Hendzel, W. Żyliński: Modelowanie i sterowanie mobilnych robotów kołowych. Wydawnictwo Naukowe PWN, Warszawa 2002. 2. K. Tchoń, A. Mazur, I. Hossa, R. Dulęba: Manipulatory i roboty mobilne. Wydawnictwo PLJ, Warszawa 2000. 3. T. Zielińska: Maszyny Kroczące. Podstawy, projektowanie, sterowanie i wzorce biologiczne. Wydawnictwo Naukowe PWN, Warszawa 2003.
Literatura uzupełniająca
1. Siegwart R., Nourbakhsh I.: Introduction to autonomous mobile robots, MIT Press, 2004 2. Murphy R.: Introduction to AI Robotics, MIT Press, 2000
Nazwa przedmiotu: Zdecentralizowane układy automatyki i robotyki Kod przedmiotu: 11.9-WE-AIR-ZUAR-PS12_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Marcin Witczak, prof. UZ
Prowadzący przedmiot: dr inż. Łukasz Dziekan
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 3 zal. na ocenę 6 stacjonarne
obowiązkowy
laboratorium 30 2 3 zal. na ocenę obowiązkowy
wykład 18 2 3 zal. na ocenę 6 niestacjonarne
obowiązkowy
laboratorium 18 2 3 zal. na ocenę obowiązkowy
Cel przedmiotu
- zapoznanie studentów z podstawami zdecentralizowanych systemów automatyki i robotyki - ukształtowanie wśród studentów zrozumienia konieczności zapewnienia wysokiego stopnia decentralizacji systemów sterowania - ukształtowanie podstawowych umiejętności w zakresie projektowania zdecentralizowanych systemów automatyki i robotyki
Zakres tematyczny
Wprowadzenie. Struktury funkcjonalne komputerowych systemów automatyki. Struktury sprzętowe - klasyfikacja. Charakterystyka systemów: DCS, hybrydowych, SCADA Struktury systemów. Przegląd struktur systemów DCS, rozwiązania sieciowe, redundancje. Stacje Procesowe. Przegląd stacji procesowych: funkcje, struktury sprzętowe, redundancje, oprogramowanie Kierunki rozwoju. Nowe funkcje systemów DCS, zaawansowane algorytmy sterowania i diagnostyka w systemach DCS. Wprowadzenie do Proficy Process Systems. Demonstracja przykładowych rozwiązań. Projektowanie systemów DCS. Przegląd architektury Proficy Process Systems. Stacje inżynierskie. Obsługa alarmów. Przetwarzania danych procesowych. Konsole operatorski. Archiwizacja i przetwarzanie danych historycznych.
Metody kształcenia
wykład: dyskusja laboratorium: gry dydaktyczne, ćwiczenia laboratoryjne
Efekty kształcenia
Potrafi pracować indywidualnie i w zespole K2A_U06, K2A_U17
T2A_U13, T2A_U16, T2A_U17
Jest zdolny do wdrożenia zaproponowanego systemu DCS, oraz potrafi zaplanować i przeprowadzić jego testy
K2A_U06, K2A_U17
T2A_U13, T2A_U16, T2A_U17
Potrafi przygotować i przeprowadzić projekt aplikacji systemów DCS do sterowania i do nadzorowania procesów przemysłowych
K2A_U06, K2A_U17
T2A_U13, T2A_U16, T2A_U17
Charakteryzuje i interpretuje pracę stacji procesowych, operatorskich i inżynierskich
K2A_U06, K2A_U17
T2A_U13, T2A_U16, T2A_U17
Potrafi wymienić i scharakteryzować różne rozwiązania systemów klasy DCS (zdecentralizowane układy sterowania) i ich struktury
K2A_U06, K2A_U17
T2A_U13, T2A_U16, T2A_U17
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny ze sprawdzianów przeprowadzonych w formie pisemnej, Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: kolokwium - laboratorium: prezentacja ustna, kolokwium Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (180 godz.) Godziny kontaktowe = 60 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz. Zajęcia realizowane na odległość = 24 godz. Studia niestacjonarne (180 godz.) Godziny kontaktowe = 36 godz. Przygotowanie się do zajęć = 24 godz. Zapoznanie się ze wskazaną literaturą = 24 godz. Przygotowanie raportu/sprawozdania = 24 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz. Zajęcia realizowane na odległość = 24 godz.
Przygotowanie się do egzaminu = 24 godz.
Literatura podstawowa
1. A.G. Aghdam, J. Lavaei: Decentralized control of interconnected systems, VDM Verlag, Berlin, 2008 2. Bailey D. I E. Wright: Practical SCADA for Industry, Elsevier, London, 2003 3. P. Tatjewski: Zaawansowane sterowanie obiektów przemysłowych, struktury i algorytmy, EXIT, Warszawa 2002. 4. GE Fanuc: Proficy Process Systems - dokumentacja, www.astor.com.pl 5. Stanisław H. Żak, Systems and Control, Oxford University Press, New York, 2003
Nazwa przedmiotu: Zaawansowane systemy decyzyjne Kod przedmiotu: 11.9-WE-AIR-ZSD-PS13_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Andrzej Pieczyński, prof. UZ
Prowadzący przedmiot: dr hab. inż. Andrzej Pieczyński, prof. UZ, dr inż. Paweł Majdzik
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 3 stacjonarne
obowiązkowy
laboratorium 15 1 3 zal. na ocenę obowiązkowy
wykład 9 1 3 zal. na ocenę 3 niestacjonarne
obowiązkowy
laboratorium 9 1 3 zal. na ocenę obowiązkowy
Cel przedmiotu
Cele: - zapoznanie z zaawansowanymi technikami wydobywania wiedzy z danych - poznanie metod zastosowania miękkich obliczeń w systemach podejmowania decyzji - ukształtowanie umiejętności budowy hybrydowych systemów ekspertowych - nabycie umiejętności budowy systemów decyzyjnych w warunkach wiedzy niepewnej i nieprecyzyjnej
Zakres tematyczny
Podejmowanie decyzji w warunkach niepełnej, niepewnej i nieprecyzyjnej informacji. Parametryczne i nieparametryczne problemy decyzyjne. Zastosowanie przybliżonych i rozwiniętych systemów ekspertowych. Teoria możliwości. Zastosowanie zbiorów przybliżonych i rozmytych w bazach wiedzy. Optymalizacja drzew decyzyjnych. Odkrywanie wiedzy w bazach danych, eksploracja danych. Przygotowanie wstępne danych. Zastosowanie miękkich obliczeń w wydobywaniu wiedzy z danych (data mining). Zastosowanie sieci neuronowych w podejmowaniu decyzji. Sieci neuronowe w grupowaniu i klasyfikacji. Ekstrakcja wiedzy z danych z wykorzystaniem sieci neuronowych. Rozmyte systemy decyzyjne. Systemy neuronowo rozmyte i ewolucyjno rozmyte w tworzeniu bazy wiedzy. Klasyfikatory rozmyte. Neuronowo-rozmyte systemy decyzyjne różnego typu. Zastosowanie zbiorów przybliżonych w wspomaganiu decyzji. Zbiory przybliżone oparte na dominacji. Indukcja wzorców klasyfikacji w postaci reguł decyzyjnych. Projektowanie systemów wspomagania decyzji. Hybrydowe systemy decyzyjne.
Metody kształcenia
wykład: konsultacje, metoda projektu, ćwiczenia laboratoryjne, wykład problemowy laboratorium: symulacja, konsultacje, metoda projektu, ćwiczenia laboratoryjne
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium w formie pisemnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: projekt, sprawozdanie, kolokwium, egzamin w formie pisemnej - laboratorium: projekt, sprawozdanie, sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (90 godz.) Godziny kontaktowe = 30 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 12 godz. Przygotowanie raportu/sprawozdania = 12 godz. Wykonanie zadań zleconych przez prowadzącego = 12 godz. Zajęcia realizowane na odległość = 12 godz. Studia niestacjonarne (90 godz.)
Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 12 godz. Zapoznanie się ze wskazaną literaturą = 12 godz. Przygotowanie raportu/sprawozdania = 12 godz. Wykonanie zadań zleconych przez prowadzącego = 12 godz. Zajęcia realizowane na odległość = 12 godz. Przygotowanie się do egzaminu = 12 godz.
Literatura podstawowa
1. Z. Bubnicki i in., Techniki informacyjne w badaniach systemowych, Wydawnictwa Naukowo-Techniczne, Warszawa, 2007 2. J. Łęski, Systemy neuronowo-rozmyte, Wydawnictwa Naukowo-Techniczne, Warszawa, 2008 3. R. K. Nowicki, Rozmyte systemy decyzyjne w zadaniach z ograniczoną wiedzą, Akademicka Oficyna Wydawnicza Exit, Warszawa, 2009 4. D. Rutkowska, M. Piliński, L. Rutkowski, Sieci neuronowe, algorytmy genetyczne i zbiory rozmyte, Wydawnictwo Naukowe PWN, Warszawa, 1999
Literatura uzupełniająca
1. Pieczyński, Reprezentacja wiedzy w diagnostycznym systemie ekspertowym, Lubuskie Towarzystwo Naukowe w Zielonej Górze, Zielona Góra, 2003. 2. B. Nadiru, J. Y. Cheung, Fuzzy Engineering Expert Systems with Neural Network Applications, John Wiley & Sons, Inc. New York, 2002.
Nazwa przedmiotu: Automatyzacja procesów przemysłowych Kod przedmiotu: 06.0-WE-AIR-APP-PS11_S2S
Język: polski
Odpowiedzialny za przedmiot: dr inż. Paweł Majdzik
Prowadzący przedmiot: dr inż. Paweł Majdzik
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 3 stacjonarne
obowiązkowy
laboratorium 30 2 3 zal. na ocenę obowiązkowy
wykład 9 1 3 zal. na ocenę 3 niestacjonarne
obowiązkowy
laboratorium 18 2 3 zal. na ocenę obowiązkowy
Cel przedmiotu
- zapoznanie studenta z metodami projektowania zautomatyzowanych systemów produkcyjnych - nabycie umiejętności projektowania i programowania procedur diagnostycznych dla elementów składowych systemu oraz procedur sterowania przebiegiem procesów produkcyjnych - zapoznanie z wymaganiami dotyczącymi projektowania systemów czasu rzeczywistego
Zakres tematyczny
Wprowadzenie. Celowość i techniczne możliwości automatyzacji procesów przemysłowych. Podstawowe elementy przemysłowego systemu automatyzacyjnego. Stopień automatyzacji procesu. Poziomy systemu automatyzującego i ich wymagania. Graficzna reprezentacja procesów przemysłowych. Automatyzacja w wybranych gałęziach przemysłu: układy mechaniczne, hydrauliczne, pneumatyczne, elektryczne i mieszane. Urządzenia i systemy automatyzujące. Komputerowe systemy automatyzacyjne i sterowniki używane do automatyzacji procesów przemysłowych. Sterowniki programowalne PLC - ich budowa, zastosowania i tryby pracy. Scentralizowanie i rozproszone struktury automatyzacji - topologia, zalety i wady. Systemy automatyzujące z redundancją sprzętową i programową. Systemy odporne na uszkodzenia. Reprezentacja danych procesów przemysłowych w systemach automatyzujących. Konwersja analogowo-cyfrowa i cyfrowo analogowa. Podstawy sterowania cyfrowego. Komunikacja magistralą PROFIBUS oraz przemysłową siecią ETHERNET. Systemy czasu rzeczywistego. Interakcja pomiędzy procesami przemysłowymi a systemami automatyzującymi. Klasyfikacja i analiza wymagań procesów sterowanych w czasie rzeczywistym. Współbieżność procesów i ich realizacja. Asynchroniczne i synchroniczne programowanie systemów czasu rzeczywistego. Metody synchronizacji procesów: semafory i obszary krytyczne. Komunikacja pomiędzy procesami: pamięć dzielona i przesyłanie komunikatów. Metody szeregowania zadań. Programowanie systemów czasu rzeczywistego w języku ADA. Robotyzacja procesów przemysłowych. Roboty w systemach produkcyjnych i transportowych. Analiza typowych rozwiązań: manipulacyjne, orientowania, mocowania, wykonawcze, kontrolne, diagnostyczne, sterowania. Niezawodność, elastyczność i eksploatacja systemów zrobotyzowanych. Struktura i funkcje zautomatyzowanych systemów produkcyjnych. Zasady projektowania zautomatyzowanych stanowisk pracy z robotami przemysłowymi. Automatyzacja i robotyzacja wybranych procesów przemysłowych: montaż, spawanie, paletyzacja, malowanie, obsługa obrabiarek sterowanych numerycznie. Statystyczne narzędzia zarządzania jakością procesów przemysłowych. Klasyczne i statystyczne metody w sterowaniu jakością. Omówienie metod statystycznych wykorzystywanych w statystycznym sterowaniu procesem (SPC), nadzorowaniu aparatury kontrolno-pomiarowej (MSA), analizie skutków i przyczyn wad (FMEA) oraz statystycznej kontroli odbiorczej. Stopień spełnienia przez proces wymogów jakościowych. Karty kontrolne Shewharta. Statystyczna kontrola odbiorcza. Omówienie metod statystycznych wykorzystywanych w systemach zarządzania jakością zgodnych z ISO 9000.
Metody kształcenia
wykład: ćwiczenia laboratoryjne, wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z kolokwiów pisemnych lub ustnych przeprowadzonych co najmniej raz w semestrze. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: sprawdzian, kolokwium - laboratorium: sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (90 godz.) Godziny kontaktowe = 45 godz. Przygotowanie się do zajęć = 18 godz. Zapoznanie się ze wskazaną literaturą = 9 godz. Wykonanie zadań zleconych przez prowadzącego = 18 godz. Studia niestacjonarne (90 godz.) Godziny kontaktowe = 27 godz. Przygotowanie się do zajęć = 30 godz. Zapoznanie się ze wskazaną literaturą = 9 godz. Wykonanie zadań zleconych przez prowadzącego = 24 godz.
Literatura podstawowa
1. Mikulczyński, T.: Automatyzacja procesów produkcyjnych. Wydawnictwa Naukowo-Techniczne WNT, Warszawa, 2009. 2. Broel-Plater, B.: Układy wykorzystujące sterowniki PLC. Projektowanie algorytmów sterowania. Wydawnictwo MIKOM, Warszawa 2009. 3. Honczarenko, J.: Roboty przemysłowe. Budowa i zastosowanie. WNT, Warszawa 2010. 4. Kowalewski, H.: Automatyzacja dyskretnych procesów produkcyjnych. WNT, Warszawa, 1984.
Nazwa przedmiotu: Wizja maszynowa w robotyce i automatyzacji Kod przedmiotu: 11.9-WE-AIR-WMWRIA-PSW_A9_S2S
Język: polski
Odpowiedzialny za przedmiot: dr inż. Bartłomiej Sulikowski
Prowadzący przedmiot: prof. dr hab. inż. Dariusz Uciński, dr inż. Bartłomiej Sulikowski
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 zal. na ocenę 2 stacjonarne
wybieralny
projekt 15 1 2 zal. na ocenę wybieralny
wykład 18 2 2 zal. na ocenę 2 niestacjonarne
wybieralny
projekt 9 1 2 zal. na ocenę wybieralny
Cel przedmiotu
- zapoznanie studentów z zastosowaniem systemów wizyjnych w procesie sterowania robotem i zespołem robotów - zapoznanie studentów z zaawansowanymi algorytmami przetwarzania obrazów, ekstrakcji cech i klasyfikacji podczas działania systemu wizyjnego - ukształtowanie umiejętności strojenia układów przetwarzania obrazów (zastosowanie filtrów różnego rodzaju, dwuwymiarowa transformata Fouriera, transformata Hadamarda) - zapoznanie studentów z zagadnieniem stereowizji - zapoznanie studentów z problemem rozpoznawania ruchu (określanie kierunku, zwrotu, prędkości, przewidywanie położenia)
Zakres tematyczny
Akwizycja obrazów cyfrowych. Optyka. Dyskretyzacja. Twierdzenie Shannona, Matryce CCD i CMOS, metody efektywnego przesyłania obrazów. Integracja systemów wizyjnych z urządzeniami wykonawczymi (robotami, systemami automatyki) i zabezpieczeniami. Transformacje globalne i lokalne. Transformata Fouriera. Szybka transformata Fouriera. Transformata Hadamarda. Operatory liniowe i nieliniowe. Metody segmentacji. Progowanie. Segmentacja na podstawie podobieństw i różnic. Ekstrakcja cech. Metody statystyczne. Metoda Analizy Składników Głównych (PCA). Metoda minimalizacji entropii (ME). Klasyfikacja. Metody z grupy NN, Metody sztucznej inteligencji w rozpoznawaniu obrazów. Stereowizja. Obrazy w sterowaniu robotami. Orientacja. Rozpoznawanie ruchu.
Metody kształcenia
wykład: dyskusja, metoda projektu, wykład konwencjonalny projekt: metoda projektu
Efekty kształcenia
potrafi scharakteryzować proces sterowania manipulatorem w oparciu o system wizyjny
K2A_W07 T2A_W03, T2A_W05
potrafi zintegrować system wizyjny z działającymi systemami automatyki i robotyki
K2A_U11 T2A_U09, T2A_U10
potrafi opisać zagadnienie stereowizji i określić obszary jej zastosowań w robotyce
K2A_W07 T2A_W03, T2A_W05
potrafi scharakteryzować wszystkie etapy przetwarzania obrazów K2A_W07 T2A_W03, T2A_W05
potrafi zaproponować dobór elementów składowych systemu wizyjnego spełniającego zadawane wymagania
K2A_W07, K2A_U11
T2A_W03, T2A_W05, T2A_U09, T2A_U10
zna działanie przemysłowych systemów wizyjnych K2A_W07 T2A_W03, T2A_W05
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium przeprowadzonego przynajmniej raz w semestrze. Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z zadania projektowego wskazanego przez prowadzącego zajęcia. Metody weryfikacji - wykład: projekt, sprawozdanie, sprawdzian, kolokwium - projekt: projekt Składowe oceny końcowej = wykład: 65% + projekt: 35%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 45 godz. Przygotowanie się do zajęć = 5 godz. Zapoznanie się ze wskazaną literaturą = 7 godz. Przygotowanie raportu/sprawozdania = 3 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 27 godz. Przygotowanie się do zajęć = 10 godz. Zapoznanie się ze wskazaną literaturą = 7 godz. Przygotowanie raportu/sprawozdania = 6 godz. Wykonanie zadań zleconych przez prowadzącego = 10 godz.
Literatura podstawowa
1. Horn B. K. P., Robot Vision, MIT Press, McGraw-Hill, 1986 2. Nieniewski M., Segmentacja obrazów cyfrowych. Metody segmentacji wielodziałowej, EXIT, Warszawa, 2005 3. Davies E.R., Machine Vision. Theory, algorithms, practicalities, Elsevier, 2005 4. Hornberg A. (ed)., Handbook of machine vision, Willey-VCH Verlag, 2006
Literatura uzupełniająca
1. Skarbek W., Metody reprezentacji obrazów cyfrowych, PLJ, Warszawa, 1993. 2. Pavlidis T., Grafika i przetwarzanie obrazów, WNT, Warszawa, 1987. 3. Tadeusiewicz R., Korohoda P., Komputerowa analiza i przetwarzanie obrazów, FPT, Kraków, 1997. 4. Ballard D. H., Brown C. M., Computer Vision, Prentice-Hall, New York, 1982.
Nazwa przedmiotu: Systemy wieloagentowe Kod przedmiotu: 11.9-WE-AIR-SW-PSW_A9_S2S
Język: polski
Odpowiedzialny za przedmiot: dr inż. Mariusz Jacyno
Prowadzący przedmiot: dr inż. Mariusz Jacyno, prof. dr hab. inż. Dariusz Uciński
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 zal. na ocenę 2 stacjonarne
wybieralny
projekt 15 1 2 zal. na ocenę wybieralny
wykład 18 2 2 zal. na ocenę 2 niestacjonarne
wybieralny
projekt 9 1 2 zal. na ocenę wybieralny
Cel przedmiotu
Cel przedmiotu - zapoznanie studentów z architekturą oraz właściwościami systemów wieloagentowych - ukształtowanie wśród studentów zrozumienia konieczności koordynacji systemów wieloagentowych oraz zaznajomienie ich
z obecnymi mechanizmami koordynacji - ukształtowanie podstawowych umiejętności wykorzystania modeli systemów wieloagentowych podczas rozwiązywania problemów z zakresu koordynacji autonomicznych robotów
Zakres tematyczny
Wprowadzenie. Agenty i obiekty. Agenty i systemy ekspertowe. Agenty i systemy rozproszone. Typowe zastosowania systemów agentowych. Inteligentne agenty. Abstrakcyjne architektury agentowe. Zadania agentów. Projektowanie inteligentnych agentów. Agenty wnioskujące. Agenty jako systemy reaktywne. Agenty hybrydowe. Systemy wieloagentowe. Współpraca: kooperatywne rozproszone rozwiązywanie problemów (CDPS), planowanie częściowo globalne, zgodność i koordynacja. Wieloagentowe podejmowanie decyzji. Interakcje wieloagentowe. Koncepcje rozwiązania. Równowaga Nasha. Strategie czyste i mieszane. Efektywność w sensie Pareto. Kooperatywność i niekooperatywność. Interakcje o sumie zerowej i inne. Dylemat więźnia. Eksperymenty Axelroda. Formowanie koalicji: rdzeń, wartość Shapleya, reprezentacja dla gier koalicyjnych, generowanie struktury koalicyjnej. Alokacja rzadkich zasobów: typy aukcji, aukcje pojedynczych pozycji (angielska, holenderska, Vickreya), aukcje kombinatoryczne, określanie zwycięzcy, języki licytacji, mechanizm VCG. Logiczne podstawy systemów wieloagentowych: logika modalna na potrzeby wnioskowania epistemicznego, wnioskowanie o stanie mentalnym, logika kooperatywna. Zastosowania tego typu logik. Systemy złożone, emergentne oraz samoorganizujące się. Systemy autonomiczne.
Metody kształcenia
wykład: metoda projektu, wykład konwencjonalny projekt: metoda projektu
Efekty kształcenia
Potrafi pracować indywidualnie i w zespole. K2A_W07 T2A_W03, T2A_W05
Jest w stanie wyjaśnić pojęcie samoorganizacji oraz mechanizmy odpowiedzialne za jej pojawienie się w systemach złożonych.
K2A_W07 T2A_W03, T2A_W05
Potrafi zdefiniować pojęcie systemu złożonego oraz jego głównych właściwości. K2A_W07 T2A_W03, T2A_W05
Zna techniki umożliwiające komunikację i współpracę w takich systemach, potrafiąc dokonać implementacji dobierając odpowiedni sprzęt i oprogramowanie.
K2A_W07 T2A_W03, T2A_W05
Potrafi rozróżniać architektury systemów inteligentnych autonomicznych agentów. K2A_W07 T2A_W03, T2A_W05
Potrafi przedstawić trzy podstawowe techniki tworzenia agentów oraz wyjaśnić różnice pomiędzy nimi.
K2A_W07 T2A_W03, T2A_W05
Potrafi projektować systemy wieloagentowe w robotyce mobilnej. K2A_W07 T2A_W03, T2A_W05
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z kolokwiów pisemnych lub ustnych przeprowadzonych co najmniej raz w semestrze. Projekt - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z zadania projektowego przydzielonego przez prowadzącego zajęcia. Metody weryfikacji - wykład: egzamin w formie pisemnej - projekt: projekt Składowe oceny końcowej = wykład: 50% + projekt: 50%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 45 godz. Zapoznanie się ze wskazaną literaturą = 5 godz. Przygotowanie raportu/sprawozdania = 5 godz. Wykonanie zadań zleconych przez prowadzącego = 5 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 27 godz. Zapoznanie się ze wskazaną literaturą = 10 godz. Przygotowanie raportu/sprawozdania = 10 godz. Wykonanie zadań zleconych przez prowadzącego = 13 godz.
Literatura podstawowa
1. M. Wooldridge, An Introduction to MutliAgent Systems, Wiley, Chichestery, 2009 2. Y. Shoham and K. Leyton-Brown Multiagent Systems: Algorithmic, Gamer-Theoretic, and Logical Foundations, Cambridge University Press, Cambridge, 2008
Nazwa przedmiotu: Metody programowania sterowników logicznych Kod przedmiotu: 11.9-WE-AIR-MPSL-PSW_B10_S2S
Język: polski
Odpowiedzialni za przedmiot: prof. dr hab. inż. Marian Adamski, dr inż. Małgorzata Kołopieńczyk
Prowadzący przedmiot: prof. dr hab. inż. Marian Adamski, dr inż. Małgorzata Kołpieńczyk
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 2 zal. na ocenę wybieralny
wykład 18 2 2 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 2 zal. na ocenę wybieralny
Cel przedmiotu
Cel: - zapoznanie studentów z technikami projektowania i programowania nowoczesnych przemysłowych systemów sterowania klasy PLC - ukształtowanie umiejętności konfiguracji i programowania sterowników klasy SIMATIC S7-1200 - ukształtowanie umiejętności wizualizacji prostych procesów przemysłowych
Zakres tematyczny
Wprowadzenie. Specyfikacja i weryfikacja formalna programów sterowania logicznego. Systemy reaktywne o podwyższonym stopniu bezpieczeństwa. Przykłady wizualnej specyfikacji programów sterowania logicznego w języku UML. Diagram przypadków użycia, diagram maszyny stanowej, diagram aktywności. Przykłady weryfikacji formalnej z wykorzystaniem sieci Petriego i logiki formalnej . Regułowy opis sieci Petriego w języku sekwentów Gentzena. Formalna specyfikacja sieci Petriego z wykorzystaniem tablic decyzyjnych. Wzajemne odwzorowanie sieci Petriego i diagramów sterowania SFC. Opis programu w języku drabinkowym LD na podstawie tablicy decyzyjnej. Wykorzystanie profesjonalnych narzędzi do weryfikacji i uwiarygodniania programów: sterowania logicznego. Weryfikacja modelu metodą „model checking”. SMV. Architektura i obsługa sterowników nowej generacji: sterownik STEP7-1200 firmy Siemens. Praca sterownika w sieci przemysłowej. Elementy wizualizacji. Sposoby sprawdzania poprawności oprogramowania. Testowanie programów. Programowanie sterowników zgodne z normami międzynarodowymi IEC. Standard 1131-3. Nowe wymagania stawiane sterownikom w systemach o podwyższonej niezawodności (dependable systems). Implementacja programowa współbieżnych i rozproszonych algorytmów sterowania. Modularność. Rdzenie projektowe. Specyfikowanie i konfigurowanie diagramów FBD. Sterowniki softwarowe SLC. Modelowanie oprogramowania z wykorzystaniem diagramów skończonej maszyny stanów. System CAD StateWORKS. Programowanie sterowników PLC nowej generacji firmy Siemens. Zwiększona rola diagramów FBD,. Akceptacja schematów drabinkowych przez przemysł., Uniwersalność języka strukturalnego ST. oraz Hierarchiczne diagramy sterowania SFC jako dogodna forma odwzorowania sieci Petriego i diagramów maszyny stanów UML.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium przeprowadzonego przynajmniej raz w semestrze. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z wykonywanych ćwiczeń laboratoryjnych. Metody weryfikacji - wykład: sprawdzian - laboratorium: sprawozdanie Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 45 godz. Przygotowanie się do zajęć = 3 godz. Zapoznanie się ze wskazaną literaturą = 3 godz. Przygotowanie raportu/sprawozdania = 3 godz. Wykonanie zadań zleconych przez prowadzącego = 6 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 27 godz. Przygotowanie się do zajęć = 7 godz. Zapoznanie się ze wskazaną literaturą = 7 godz. Przygotowanie raportu/sprawozdania = 7 godz.
Wykonanie zadań zleconych przez prowadzącego = 12 godz.
Literatura podstawowa
1. J.K.Peckol, Embedded Systems. A Complementary Design Tool, John Wiley, 2009 2. J. Kasprzyk, Programowanie sterowników przemysłowych WNT, Warszawa, 2008 3. M. Adamski, M. Chodań, Modelowanie układów sterowania dyskretnego z wykorzystaniem sieci SFC, Wydawnictwo Politechniki Zielonogórskiej, 2000 4. Praca zbiorowa pod red. M.Adamskiego i Z. Skowrońskiego, Modele formalne w syntezie systemowej, Oficyna Wydawnicza Uniwersytetu Zielonogórskiego, 2010 5. F. Bonifatti, P. Monari, U. Samperi, IEC 1131-1 Programming Methodology. Software engineering methods for industrial automated systems, CJ International, Seyssins, France, 1997
Literatura uzupełniająca
1. J.K.Peckol, Embedded Systems. A Complementary Design Tool, John Wiley, 2009 2. F.Wagner, R. Schmuki, T.Wagner, P.Wolstenholme. Modeling software with Finite State Machine. A Practical Approach, CRC Press, Parkway, 2006
Nazwa przedmiotu: Rekonfigurowalne wbudowane sterowniki logiczne Kod przedmiotu: 06.0-WE-AIR-RWSL-PSW_B10_S2S
Język: polski
Odpowiedzialni za przedmiot: prof. dr hab. inż. Marian Adamski, prof. dr hab. inż. Alexander Barkalov
Prowadzący przedmiot: prof. dr hab. inż. Marian Adamski, prof. dr hab. inż. Alexander Barkalov
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 30 2 2 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 2 zal. na ocenę wybieralny
wykład 18 2 2 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 2 zal. na ocenę wybieralny
Cel przedmiotu
Cel: - zapoznanie studentów z technologią mikrosystemów cyfrowych w kontekście układów sterowania - ukształtowanie umiejętności projektowania i programowania rekonfigurowalnych sterowników logicznych
Zakres tematyczny
Wprowadzenie. Scalony mikrosystem cyfrowy SoC jako sterownik logiczny. Struktura modularnego, rekonfigurowalnego mikrosterownika logicznego. Programowanie i konfigurowanie mikrosterownika logicznego. Programowanie wbudowanego procesora. Konfigurowanie struktury matrycowej. Rola języków opisu sprzętu w prototypowaniu mikrosterownika logicznego. Specjalizowane rekonfigurowalne sterowniki logiczne. Konfigurowanie bloków funkcjonalnych sterownika zgodnie ze standardami międzynarodowymi IEC Programowanie specjalizowanej mikroprogramowanej jednostki sterującej zgodnie ze specyfikacją w postaci diagramów SFC. Bezpieczny układowy sterownik logiczny. Architektura. Konfigurowanie. Sterowniki mikroprogramowane w systemach reaktywnych o wysokim stopniu bezpieczeństwa.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium przeprowadzonego w formie pisemnej przynajmniej raz w semestrze. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z wykonywanych ćwiczeń laboratoryjnych. Metody weryfikacji - wykład: sprawdzian - laboratorium: sprawozdanie Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 45 godz. Przygotowanie się do zajęć = 3 godz. Zapoznanie się ze wskazaną literaturą = 3 godz. Przygotowanie raportu/sprawozdania = 3 godz. Wykonanie zadań zleconych przez prowadzącego = 6 godz.
Studia niestacjonarne (60 godz.) Godziny kontaktowe = 27 godz. Przygotowanie się do zajęć = 7 godz. Zapoznanie się ze wskazaną literaturą = 7 godz. Przygotowanie raportu/sprawozdania = 7 godz. Wykonanie zadań zleconych przez prowadzącego = 12 godz.
Literatura podstawowa
1. A.Barkalov, L. Titarenko, Logic Synthesis for FMS-based Control Units, Springer-Verlag, Berlin, 2009 2. A.Barkalov, L. Titarenko, Synthesis for Compositional Microprogram Control Units, Springer-Verilag, Berlin, 2009 3. M.Adamski, A. Karatkievich, M. Węgrzyn (Ed), Design of Embedded Control Systems, Springer (USA), 2005 4. Praca zbiorowa pod red. M.Adamskiego i Z. Skowrońskiego, Modele formalne w syntezie systemowej, Oficyna Wydawnicza Uniwersytetu Zielonogórskiego, Zielona Góra, 2010
Literatura uzupełniająca
1. P. Minns, I. Elliot, FSM Based Digital Design using Verilog HDL, John Wiley, 2008 2. F. Bonifatti, P. Monari, U. Samperi, IEC 1131-3 Programming Methodology. Software engineering methods for industrial automated systems, CJ International, Seyssins, France, 1997
Nazwa przedmiotu: Automatyzacja systemów z odnawialnymi źródłami energii Kod przedmiotu: 06.0-WE-AIR-ASZOZE-PSW_C14_S2S
Język: polski
Odpowiedzialni za przedmiot: dr hab. inż. Grzegorz Benysek, prof. UZ, dr inż. Marcin Jarnut
Prowadzący przedmiot: dr hab. inż. Grzegorz Benysek, prof. UZ, dr inż. Marcin Jarnut
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 3 zal. na ocenę wybieralny
wykład 9 1 3 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 3 zal. na ocenę wybieralny
Cel przedmiotu
Cel: - zapoznanie studentów z niekonwencjonalnymi technikami wytwarzania energii elektrycznej - zapoznanie studentów z zagadnieniami dotyczącymi automatyzacji systemów z odnawialnymi źródłami energii - ukształtowanie wiedzy z zakresu wykorzystania odnawialnych źródeł energii w inteligentnych budynkach
Zakres tematyczny
Wprowadzenie. Zasoby energii i zapotrzebowanie na energię. Odnawialne źródła energii. Energia wiatru. Systemy przemiany wiatru. Energia słońca. Rodzaje i budowa kolektorów słonecznych. Przykłady instalacji przemysłowych z wykorzystaniem ogniw fotowoltaicznych. Energia geotermalna. Podstawy działania i budowy pomp ciepła. Biogaz, biomasa i ciepło odpadowe. Fermentacja jako sposób otrzymywania biogazu. Wykorzystanie słomy, chrustu. Wykorzystanie elektrolizy i wodoru. Układy sterowania odnawialnych źródeł energii. Sterowanie w układach z ogniwami fotowoltaicznymi. Automatyzacja elektrowni wiatrowych. Układy automatyki pomp ciepła. Układy sterowania kolektorów słonecznych. Sterownie w systemach wykorzystujących biomasę i biogaz. Skojarzone systemy energetyczne z odnawialnymi źródłami energii. Automatyzacja układów ze skojarzonymi źródłami odnawialnymi energii elektrycznej. Układy z ogniwami fotowoltaicznymi i kolektorami słonecznymi. Systemy ogrzewania z pompami ciepła, kolektorami słonecznymi oraz piecami na biomasę lub biogaz. Odnawialne źródła energii w inteligentnych budynkach. Inteligentny budynek. Systemy sterowania w inteligentnych budynkach. Wykorzystanie odnawialnych źródeł energii w inteligentnych budynkach. Zarządzanie energią elektryczną. System grzewczy. Automatyzacja innych systemów w inteligentnym budynku. Zastosowanie sterowników PLC w inteligentnych budynkach z odnawialnymi źródłami energii.
Metody kształcenia
wykład: wykład problemowy, wykład konwencjonalny laboratorium: ćwiczenia laboratoryjne, wykład problemowy, wykład konwencjonalny
Efekty kształcenia
Potrafi pracować indywidualnie i w zespole K2A_U13 T2A_U08, T2A_U09,
T2A_U15
Potrafi posłużyć się metodami oraz urządzeniami umożliwiającymi analizę właściwości systemów z odnawialnymi źródłami energii
K2A_U13 T2A_U08, T2A_U09,
T2A_U15
Zna podstawy teoretyczne dotyczące systemów sterowania oraz wykorzystania odnawialnych źródeł energii w inteligentnych budynkach
K2A_W10 T2A_W02, T2A_W05
Ma wiedzę z zakresu źródeł energii odnawialnej K2A_W10 T2A_W02, T2A_W05
Zna zagadnienia dotyczące automatyzacji pracy systemów z odnawialnymi źródłami energii
K2A_W10 T2A_W02, T2A_W05
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnych ocen z kolokwiów pisemnych lub ustnych przeprowadzonych co najmniej raz w semestrze. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze wszystkich ćwiczeń laboratoryjnych, przewidzianych do realizacji w ramach programu laboratorium. Metody weryfikacji - wykład: prezentacja ustna, kolokwium - laboratorium: sprawozdanie, prezentacja ustna, kolokwium Składowe oceny końcowej = wykład: 60% + laboratorium: 40%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 30 godz. Przygotowanie się do zajęć = 6 godz. Zapoznanie się ze wskazaną literaturą = 6 godz. Przygotowanie raportu/sprawozdania = 9 godz. Wykonanie zadań zleconych przez prowadzącego = 3 godz. Przygotowanie się do kolokwium: 6 Studia niestacjonarne (60 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 10 godz. Zapoznanie się ze wskazaną literaturą = 8 godz. Przygotowanie raportu/sprawozdania = 10 godz. Wykonanie zadań zleconych przez prowadzącego = 8 godz. Przygotowanie: 6
Literatura podstawowa
1. E. Klugmann, E. Klugmann-Radziemska, Alternatywne źródła energii. Energetyka fotowoltaiczna, Wydawnictwo Ekonomia i Środowisko, Białystok, 1999 2. W. Lewandowski, Proekologiczne źródła energii odnawialnej, WNT, Warszawa, 2001 3. J. Marecki, Podstawy przemian energii, WNT, Warszawa, 1995 4. T. Legierski, J. Kasprzyk, J. Wyrwał, J. Hajda, Programowanie sterowników PLC, Wydawnictwo Pracowni Komputerowej Jacka Skalmierskiego, Gliwice 1998
Literatura uzupełniająca
1. S. Heier, R. Waddington, Grid Integration of Wind Energy Conversion Systems, John Wiley & Sons, 2006 2. A. Luque, Handbook of Photovoltaic Science and Engineering, John Wiley & Sons, 2003 3. R. O’Hayre, Fuel Cell Fundamentals, John Wiley & Sons, 2006
Nazwa przedmiotu: Systemy komunikacji Kod przedmiotu: 06.5-WE-AIR-SK-PSW_D15_S2S
Język: polski
Odpowiedzialny za przedmiot: doc. dr inż. Emil Michta
Prowadzący przedmiot: doc. dr inż. Emil Michta
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 3 zal. na ocenę wybieralny
wykład 9 1 3 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 3 zal. na ocenę wybieralny
Cel przedmiotu
- zapoznanie studentów z podstawami budowy i funkcjonowania lokalnych i rozległych systemów komunikacji, - zapoznanie studentów z metodami analizy zależności czasowych w systemach komunikacji, - ukształtowanie wśród studentów umiejętności budowy i konfigurowania systemów komunikacji.
Zakres tematyczny
Ewolucja systemów komunikacji. Model ISO/OSI i model ISA. Klasyfikacja systemów komunikacyjnych. Model komunikacyjny sieciowego systemu automatyki. Analiza parametrów komunikacyjnych. Statyczne i dynamiczne modele zadań. Analiza dotrzymania ograniczeń czasowych w systemach automatyki - metody RM, DM i EDF. Lokalne systemy komunikacji. Sieci przemysłowe i lokalne sieci komputerowe w systemach automatyki. Standardy komunikacyjne lokalnych systemów komunikacji. Analiza i synteza systemów automatyki z sieciami i Profibus, CAN, LonWorks i Interbus-S. Analiza i synteza systemów automatyki z sieciami bezprzewodowymi IEEE 802.11 i IEEE 802.15. Ethernet przemysłowy w lokalnych systemach komunikacji. Rozległe systemy komunikacji. Standardowe i dedykowane rozległe systemy komunikacji w zastosowaniach automatyki. Wykorzystanie kablowych, światłowodowych i bezprzewodowych sieci teleinformatycznych. Technologie internetowe w
rozległych systemach automatyki. Determinizm czasowy w sieciach TCP/IP. Tunelowanie protokołów w systemach lokalnych. Bezpieczeństwo przesyłanej informacji. Rozwiązania systemów komunikacyjnych w automatyzacji procesów przemysłowych i obiektów. Integracja systemów komunikacji.
Metody kształcenia
wykład: dyskusja, konsultacje, wykład konwencjonalny laboratorium: dyskusja, konsultacje, praca w grupach, ćwiczenia laboratoryjne
Efekty kształcenia
K_K01 - ma świadomość znaczenia systemów komunikacyjnych w obszarze automatyki i robotyki K2A_W15 T2A_W02
K_U02 - potrafi zbudować i uruchomić wybrane systemy komunikacyjne K2A_U20 T2A_U16
K_U01 - potrafi wyznaczyć parametry komunikacyjne dla wybranych standardów komunikacyjnych K2A_U20 T2A_U16
K_W01 - ma wiedzę w zakresie standardów, budowy i funkcjonowania systemów komunikacyjnych K2A_W15 T2A_W02
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium w formie pisemnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów z przygotowania teoretycznego do ćwiczeń oraz zaliczenia wszystkich ćwiczeń laboratoryjnych. Metody weryfikacji - wykład: kolokwium - laboratorium: sprawdzian Składowe oceny końcowej = wykład: 50% + laboratorium: 50%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 30 godz. Przygotowanie się do zajęć = 15 godz. Zapoznanie się ze wskazaną literaturą = 5 godz. Wykonanie zadań zleconych przez prowadzącego = 10 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 19 godz. Zapoznanie się ze wskazaną literaturą = 5 godz. Wykonanie zadań zleconych przez prowadzącego = 10 godz. Zajęcia realizowane na odległość = 8 godz.
Literatura podstawowa
1. Kowalik R., Pawlicki C.: Podstawy teletechniki. Oficyna Wydawnicza Politechniki Warszawskiej. Warszawa, 2006 2. Michta E.: Modele komunikacyjne sieciowych systemów pomiarowo - sterujących. Wydawnictwo Politechniki Zielonogórskiej. Zielona Góra, 2000 3. Thompson L.M.: Industrial Data Communication. ISA, 2007
Literatura uzupełniająca
1. Mahalik N.P.: Fieldbus Technology. Springer, 2003 2. Neuman P.: Systemy komunikacji w technice automatyzacji. COSIW, Warszawa, 2003
Nazwa przedmiotu: Sterowanie w strukturze sieci rozległej Kod przedmiotu: 06.5-WE-AIR-SWSSR-PSW_D15_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Wiesław Miczulski, prof. UZ
Prowadzący przedmiot: dr inż. Robert Szulim
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 3 zal. na ocenę wybieralny
wykład 9 1 3 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 3 zal. na ocenę wybieralny
Cel przedmiotu
- Zapoznanie studentów z wybranymi elementami technologii informatycznych stosowanych w systemach wykorzystujących strukturę sieci rozległej - Ukształtowanie podstawowych umiejętności w zakresie projektowania i uruchamiania systemów informatycznych wykorzystujących interfejsy sieciowe, elementy programowania współbieżnego oraz bazy danych
Zakres tematyczny
Wprowadzenie. Wybrane elementy technologii sieciowych stosowane w strukturze sieci rozległej. Protokoły TCP/IP, HTTP, FTP, SMTP. Przegląd możliwości współczesnych systemów operacyjnych stosowanych w urządzeniach wbudowanych oraz serwerach w zakresie komunikacji z urządzeniami zewnętrznymi przy pomocy protokołu TCP/IP. Rozwiązania programowe dedykowane do wymiany danych w heterogenicznych środowiskach sieciowych. Sieciowe strumienie wymiany danych TCP i UDP. Wybrane elementy budowy aplikacji współbieżnych. Zastosowanie ich do budowy aplikacji wykorzystujących technologie internetowe i urządzenia automatyki. Procesy, wątki, współdzielenie zasobów, unikanie zakleszczeń. Serwery WWW. Budowa i działanie serwerów WWW. Uruchamianie, administrowanie i wdrażanie w strukturze sieci rozległej w różnych systemach operacyjnych. Uruchamianie portali WWW przeznaczonych do współpracy z urządzeniami automatyki. Zastosowanie technologii Java i .NET w sterowaniu w strukturze sieci rozległej. Wykorzystanie wybranych elementów technologii do przesyłania danych w środowiskach sieciowych i prezentacja ich w postaci apletów na stronach WWW. Integracja systemów baz danych z urządzeniami automatyki. Wybrane elementy budowy aplikacji dla systemów wbudowanych umożliwiających gromadzenie danych w bazach danych i udostępnianie ich do dalszego przetwarzania.
Metody kształcenia
wykład: wykład konwencjonalny laboratorium: praca w grupach, zajęcia praktyczne, metoda projektu
Efekty kształcenia
Ma świadomość znaczenia wymiany danych pomiędzy urządzeniami i systemami w obszarze automatyki i robotyki
K2A_W15 T2A_W02
Potrafi zbudować prosty system informatyczny wykorzystujący interfejsy komunikacyjne oraz elementy programowania współbieżnego
K2A_U19 T2A_U09, T2A_U10,
T2A_U16
Potrafi zbudować prosty system informatyczny wykorzystujący bazę danych do gromadzenia informacji o pracy systemu
K2A_U19 T2A_U09, T2A_U10,
T2A_U16
Potrafi uruchamiać proste portale WWW o charakterze dynamicznym K2A_U19 T2A_U09, T2A_U10,
T2A_U16
Ma podstawową wiedzę w zakresie technologii informatycznych stosowanych w strukturze sieci rozległej
K2A_W15 T2A_W02
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium w formie pisemnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów z przygotowania teoretycznego do ćwiczeń oraz zaliczenia wszystkich ćwiczeń laboratoryjnych. Metody weryfikacji - wykład: test w formie pisemnej - laboratorium: projekt, prezentacja ustna, sprawdzian Składowe oceny końcowej = wykład: 40% + laboratorium: 60%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 30 godz. Przygotowanie się do zajęć = 8 godz. Zapoznanie się ze wskazaną literaturą = 6 godz. Przygotowanie raportu/sprawozdania = 4 godz. Wykonanie zadań zleconych przez prowadzącego = 8 godz. Zajęcia realizowane na odległość = 4 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 9 godz. Zapoznanie się ze wskazaną literaturą = 9 godz. Przygotowanie raportu/sprawozdania = 4 godz. Wykonanie zadań zleconych przez prowadzącego = 10 godz. Zajęcia realizowane na odległość = 10 godz.
Literatura podstawowa
1. Pinkoń K., ABC Internetu, Helion, 1998 2. Liberty J, Hurwitz D, ASP.NET programowanie, Helion, 2007 3. W.R. Stevens, Programowanie zastosowań sieciowych w systemie Unix, Wydawnictwa Naukowo-Techniczne, Warszawa 1995
Literatura uzupełniająca
1. Ullman Jeffrey D., Widom Jennifer, Podstawowy wykład z baz danych, Wydawnictwa Naukowo-Techniczne, Warszawa 2001 2. Sportach M., Sieci komputerowe. Księga eksperta, Helion, Gliwice, 1999
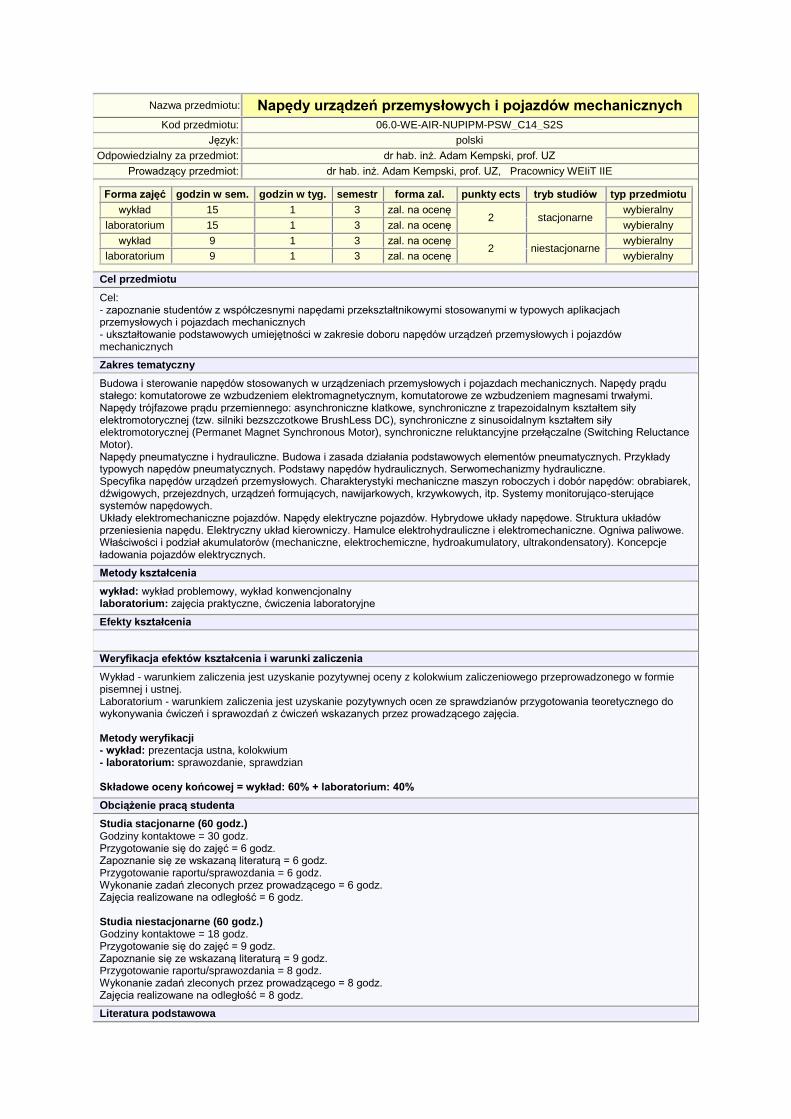
Nazwa przedmiotu: Napędy urządzeń przemysłowych i pojazdów mechanicznych Kod przedmiotu: 06.0-WE-AIR-NUPIPM-PSW_C14_S2S
Język: polski
Odpowiedzialny za przedmiot: dr hab. inż. Adam Kempski, prof. UZ
Prowadzący przedmiot: dr hab. inż. Adam Kempski, prof. UZ, Pracownicy WEIiT IIE
Forma zajęć godzin w sem. godzin w tyg. semestr forma zal. punkty ects tryb studiów typ przedmiotu
wykład 15 1 3 zal. na ocenę 2 stacjonarne
wybieralny
laboratorium 15 1 3 zal. na ocenę wybieralny
wykład 9 1 3 zal. na ocenę 2 niestacjonarne
wybieralny
laboratorium 9 1 3 zal. na ocenę wybieralny
Cel przedmiotu
Cel: - zapoznanie studentów z współczesnymi napędami przekształtnikowymi stosowanymi w typowych aplikacjach przemysłowych i pojazdach mechanicznych - ukształtowanie podstawowych umiejętności w zakresie doboru napędów urządzeń przemysłowych i pojazdów mechanicznych
Zakres tematyczny
Budowa i sterowanie napędów stosowanych w urządzeniach przemysłowych i pojazdach mechanicznych. Napędy prądu stałego: komutatorowe ze wzbudzeniem elektromagnetycznym, komutatorowe ze wzbudzeniem magnesami trwałymi. Napędy trójfazowe prądu przemiennego: asynchroniczne klatkowe, synchroniczne z trapezoidalnym kształtem siły elektromotorycznej (tzw. silniki bezszczotkowe BrushLess DC), synchroniczne z sinusoidalnym kształtem siły elektromotorycznej (Permanet Magnet Synchronous Motor), synchroniczne reluktancyjne przełączalne (Switching Reluctance Motor). Napędy pneumatyczne i hydrauliczne. Budowa i zasada działania podstawowych elementów pneumatycznych. Przykłady typowych napędów pneumatycznych. Podstawy napędów hydraulicznych. Serwomechanizmy hydrauliczne. Specyfika napędów urządzeń przemysłowych. Charakterystyki mechaniczne maszyn roboczych i dobór napędów: obrabiarek, dźwigowych, przejezdnych, urządzeń formujących, nawijarkowych, krzywkowych, itp. Systemy monitorująco-sterujące systemów napędowych. Układy elektromechaniczne pojazdów. Napędy elektryczne pojazdów. Hybrydowe układy napędowe. Struktura układów przeniesienia napędu. Elektryczny układ kierowniczy. Hamulce elektrohydrauliczne i elektromechaniczne. Ogniwa paliwowe. Właściwości i podział akumulatorów (mechaniczne, elektrochemiczne, hydroakumulatory, ultrakondensatory). Koncepcje ładowania pojazdów elektrycznych.
Metody kształcenia
wykład: wykład problemowy, wykład konwencjonalny laboratorium: zajęcia praktyczne, ćwiczenia laboratoryjne
Efekty kształcenia
Weryfikacja efektów kształcenia i warunki zaliczenia
Wykład - warunkiem zaliczenia jest uzyskanie pozytywnej oceny z kolokwium zaliczeniowego przeprowadzonego w formie pisemnej i ustnej. Laboratorium - warunkiem zaliczenia jest uzyskanie pozytywnych ocen ze sprawdzianów przygotowania teoretycznego do wykonywania ćwiczeń i sprawozdań z ćwiczeń wskazanych przez prowadzącego zajęcia. Metody weryfikacji - wykład: prezentacja ustna, kolokwium - laboratorium: sprawozdanie, sprawdzian Składowe oceny końcowej = wykład: 60% + laboratorium: 40%
Obciążenie pracą studenta
Studia stacjonarne (60 godz.) Godziny kontaktowe = 30 godz. Przygotowanie się do zajęć = 6 godz. Zapoznanie się ze wskazaną literaturą = 6 godz. Przygotowanie raportu/sprawozdania = 6 godz. Wykonanie zadań zleconych przez prowadzącego = 6 godz. Zajęcia realizowane na odległość = 6 godz. Studia niestacjonarne (60 godz.) Godziny kontaktowe = 18 godz. Przygotowanie się do zajęć = 9 godz. Zapoznanie się ze wskazaną literaturą = 9 godz. Przygotowanie raportu/sprawozdania = 8 godz. Wykonanie zadań zleconych przez prowadzącego = 8 godz. Zajęcia realizowane na odległość = 8 godz.
Literatura podstawowa
1. I. Boldea, S.A. Nasar, Electric Drives, CRC Press, 1999 2. H. Tunia, M. P. Kaźmierkowski, Automatyka napędu przekształtnikowego, PWN, 1987 3. T. Orłowska-Kowalska, Bezczujnikowe układy napędowe z silnikami indukcyjnymi, Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław, 2003 4. M. P. Kaźmierkowski, F. Blaabjerg, R. Krishnan, Control in Power Electronics, Selected Problems, Elsevier, 2002 5. Z. Grunwald, Napęd elektryczny, WNT, 1987
Literatura uzupełniająca
1. T. R. Crompton, Battery Reference Book, Newnes, Oxford, 2003 2. W. Szejnach, Napęd i sterowanie pneumatyczne, WNT, 2005