Wpływ zaburzenia środka masy na stateczność pojazdu przy ... · ruchu modelu pojazdu w...
12
JAROSŁAW ZALEWSKI WPŁYW ZABURZENIA ĝRODKA MASY NA STATECZNOĝû POJAZDU PRZY IMPULSOWYM ZAKŁÓCENIU RUCHU PROSTOLINIOWEGO Streszczenie Przeprowadzono analizĊ wpływu zaburzenia połoĪenia Ğrodka masy modelu ma- tematycznego samochodu na jego statecznoĞü, przy nagłym zakłóceniu ruchu prostoliniowego przez impulsowy obrót koła kierownicy, oraz losowo wystĊpujące nie- równoĞci nawierzchni drogi. Zagadnienie rozwaĪano bazując na definicji statecznoĞci technicznej stochastycz- nej, analizując prawdopodobieĔstwo znalezienia siĊ trajektorii pojazdu w okreĞlonym obszarze drogi. PodjĊto równieĪ próbĊ porównania otrzymanych wyników z definicją statecznoĞci rzeczywistych pojazdów (norma ISO 8855). Przeprowadzono symulacjĊ ruchu modelu pojazdu w Ğrodowisku MSC Adams/Car dla trudnych warunków drogowych, przy prĊdkoĞci 70km/h. Wyniki analiz posłuĪyü mogą równieĪ jako element okreĞlający uniwersalnoĞü prezentowanej metody. Słowa kluczowe: statecznoĞü, Ğrodek masy samochodu, zakłócenie ruchu 1. Wprowadzenie Badania nad bezpieczeĔstwem Ğrodków transportu są integralnym elementem analizy bezpie- czeĔstwa ruchu, jako całoĞci. RównieĪ elementy związane z bezpieczeĔstwem ruchu drogowego wydają siĊ byü istotne z punktu widzenia uĪytkowników dróg. Analiza dotycząca bezpieczeĔstwa i dynamiki Ğrodków transportu jest równie waĪnym zagadnieniem z punktu widzenia badaĔ nauko- wych. Badania te moĪna przeprowadziü na rzeczywistych obiektach, co generuje dodatkowe problemy wynikające przede wszystkim z koniecznoĞci posiadania zaplecza badawczego, lub uĪy- wając ich modeli matematycznych, co skraca czas i koszty. Łatwiej jest bowiem przeprowadziü symulacjĊ ruchu modelu pojazdu w Ğrodowisku wirtualnym, niĪ organizowaü rzeczywiste badania terenowe. Problem nie dotyczy oczywiĞcie wszystkich przypadków, jednak omawiane tu zagadnie- nia z pewnoĞcią naleĪą do grupy badaĔ, których realizacja wiąĪe siĊ z trudnoĞciami. WĞród nich wyróĪniü moĪna właĞciwe obciąĪenie samochodu tak, aby uzyskaü poĪądanie połoĪenie Ğrodka masy, zamkniĊty tor, na którym moĪna prowadziü badania (jazda samochodu) oraz odpowiednie warunki drogowe. Do przeprowadzenia symulacji wykorzystano pakiet MSCAdams/Car.
Transcript of Wpływ zaburzenia środka masy na stateczność pojazdu przy ... · ruchu modelu pojazdu w...

JAROSŁAW ZALEWSKI
WPŁYW ZABURZENIA RODKA MASY NA STATECZNO POJAZDU PRZY IMPULSOWYM ZAKŁÓCENIU RUCHU PROSTOLINIOWEGO
Streszczenie Przeprowadzono analiz wpływu zaburzenia poło enia rodka masy modelu ma-
tematycznego samochodu na jego stateczno , przy nagłym zakłóceniu ruchu prostoliniowego przez impulsowy obrót koła kierownicy, oraz losowo wyst puj ce nie-równo ci nawierzchni drogi.
Zagadnienie rozwa ano bazuj c na definicji stateczno ci technicznej stochastycz-nej, analizuj c prawdopodobie stwo znalezienia si trajektorii pojazdu w okre lonym obszarze drogi. Podj to równie prób porównania otrzymanych wyników z definicjstateczno ci rzeczywistych pojazdów (norma ISO 8855).
Przeprowadzono symulacj ruchu modelu pojazdu w rodowisku MSC Adams/Car dla trudnych warunków drogowych, przy pr dko ci 70km/h. Wyniki analiz posłu y mog równie jako element okre laj cy uniwersalno prezentowanej metody.
Słowa kluczowe: stateczno , rodek masy samochodu, zakłócenie ruchu
1. Wprowadzenie
Badania nad bezpiecze stwem rodków transportu s integralnym elementem analizy bezpie-cze stwa ruchu, jako cało ci. Równie elementy zwi zane z bezpiecze stwem ruchu drogowego wydaj si by istotne z punktu widzenia u ytkowników dróg. Analiza dotycz ca bezpiecze stwa i dynamiki rodków transportu jest równie wa nym zagadnieniem z punktu widzenia bada nauko-wych. Badania te mo na przeprowadzi na rzeczywistych obiektach, co generuje dodatkowe problemy wynikaj ce przede wszystkim z konieczno ci posiadania zaplecza badawczego, lub u y-waj c ich modeli matematycznych, co skraca czas i koszty. Łatwiej jest bowiem przeprowadzisymulacj ruchu modelu pojazdu w rodowisku wirtualnym, ni organizowa rzeczywiste badania terenowe. Problem nie dotyczy oczywi cie wszystkich przypadków, jednak omawiane tu zagadnie-nia z pewno ci nale do grupy bada , których realizacja wi e si z trudno ciami. W ród nich wyró ni mo na wła ciwe obci enie samochodu tak, aby uzyska po danie poło enie rodka masy, zamkni ty tor, na którym mo na prowadzi badania (jazda samochodu) oraz odpowiednie warunki drogowe.
Do przeprowadzenia symulacji wykorzystano pakiet MSCAdams/Car.

163
2. Stateczno techniczna stochastyczna
Definicj stateczno ci technicznej stochastycznej podano na podstawie pracy [1]. Dany jest układ równa stochastycznych:
)](,,[ ttxfdtdx ξ=
(1)
gdzie ),...,( 1 nxxx = oraz ),...,(),,( 1 nffytxf = s wektorami, natomiast )...,()( 1 nt ξξξ = , 0≥t jest procesem stochastycznym, którym opisano losowo wyst puj ce za-
burzenia. Układem (1) mo na opisa ruch modelu pojazdu, sprowadzaj c do takiej postaci klasyczne równania ruchu (oparte o prawa Newtona).
Zało ono, e funkcja ),,( ytxf jest okre lona dla ka dego nn EyEx ∈∈ , i 0≥t .
Przyj to, e dla procesu stochastycznego ))(,,0( ttf ξ zachodzi absolutna całkowalno :
=∞<T
dtttfP0
1}))(,,0({ ξ, dla ka dego 0>T . (2)
Zało ono tak e istnienie pewnego procesu stochastycznego ))(,,( ttXf ξ spełniaj cego kry-terium Lipschitza w przedziale [0, T]
1212 )())(,,())(,,( xxtttxfttxf −≤− ηξξ(3)
dla innego procesu )(tη , bezwzgl dnie całkowalnego w tdanym przedziale.Wynikiem powy szych zało e jest istnienie tylko jednego rozwi zania z warunkami pocz t-
kowymi 0tt = oraz 00 )( xtx = , b d cego procesem stochastycznym bezwzgl dnie ci głym,
z prawdopodobie stwem 1 dla 0tt ≥ .
Przyj to dwa obszary w przestrzeni euklidesowej nE : ω – ograniczony i otwarty, stanowi cyobszar warunków pocz tkowych oraz Ω – ograniczony i zamkni ty (obszar dopuszczalnych roz-wi za ), gdzie Ω⊂ω . Zało ono istnienie liczby dodatniej 10 << ε oraz procesu
stochastycznego )(tX , okre lonego dla 0tt ≥ . Oznaczono równie warunki pocz tkowe rozwi -
zania przez 0tt = , 00 )( xtx = oraz samo rozwi zanie przez ),,( 00 xtt . Definicja stateczno ci technicznej stochastycznej: je li ka de rozwi zanie równania (1), maj ce
warunki pocz tkowe ),,( 00 xtt w obszarze ω , nale y do obszaru Ω z prawdopodobie stwemε−1 , to układ (1) jest stateczny technicznie stochastycznie wzgl dem ω , Ω oraz procesu )(tξ
z prawdopodobie stwem ε−1 (rys. 1). Definicj t opisano wzorem (4).
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014

Jarosław Zalewski Wpływ zaburzenia rodka masy na stateczno pojazdu przy impulsowym zakłóceniu
ruchu prostoliniowego
164
ωε ∈−>Ω∈ 000 ,1}),,{( xdlaxttP (4)
Rys. 1. Graficzna interpretacja stateczno ci technicznej stochastycznej
ródło: [4].
2.1. Model matematyczny symulowanego pojazdu
Na rys. 2 przedstawiono model fizyczny symulowanego samochodu sportowego o 90 stopniach swobody [5]. Model stworzono z podsystemów o własno ciach dynamicznych zbli onych do rze-czywistych. W prezentowanym modelu obci enie reprezentowane jest przez dwie masy odpowiadaj ce kierowcy i pasa erowi (pojazd dwumiejscowy). Ponadto nadwozie obci ono baga-em umieszczonym w jego przedniej cz ci. Zaburzenia geometrii nadwozia zrealizowano jako
przesuni cie rodka masy wzgl dem jego pozycji nominalnej, okre lonej wzgl dem tzw. punktu „origo”, reprezentuj cego pocz tek układu współrz dnych zwi zanego z drog , a jednocze nie po-ruszaj cego si wraz z pojazdem.
Rys. 2. Widok pełnego modelu fizycznego badanego pojazdu
ródło: MSC Adams/Car.

165
Przy zało eniu, e brył nadwozia mo na przedstawi jako zbiór prostopadło cianów reprezen-tuj cych okre lone bryły nadwozia, model matematyczny samochodu opisa mo na jak w pracach [5], [6] czy [8] równaniami ruchu post powego i obrotowego.
Podstawowe parametry modelu samochodu sportowego w MSC Adams/Car:
– masa nadwozia bez obci enia kgm 995= ;– poło enie punktu „origo wzgl dem rodka przedniej kraw dzi niezaburzonego nadwozia:
mzymx ccc 48,0,0,9,0 −===– nominalne współrz dne rodka masy wzgl dem punktu „origo” nadwozia niezaburzonego:
mzymx ccc 45,0,0,5,1 === ; – nominalne warto ci momentów bezwładno ci dla nadwozia niezaburzonego wzgl dem osi
przechodz cych przez punkt „origo”: 222 2838,2940,401 mkgImkgImkgI zzyyxx ⋅=⋅=⋅=
; – nominalne warto ci momentów dewiacji dla nadwozia niezaburzonego wzgl dem osi prze-
chodz cych przez punkt „origo”: 0,671,0 2 =⋅== yzzxxy ImkgII
.
2.2. Zaburzenia parametrów masowo – bezwładno ciowych
Do badania stateczno ci technicznej stochastycznej w ekstremalnych warunkach ruchu przyj to zaburzenie poło enia rodka masy nadwozia wynikaj ce z nierównomiernego obci enia. Zało ono, e parametry masowo – bezwładno ciowe uległy zmianie.
Dodaj c mas kierowcy i pasa era oraz baga u zwi kszono mas całego modelu pojazdu. Odległo rodków mas obci aj cych nadwozie od przedniej jego kraw dzi pokazano na rys. 3 i 4.
Przyj to nast puj c konfiguracj obci enia nadwozia:
– masa kierowcy kgm 751 = , masa pasa era kgm 1052 = , masa baga u kgmB 50= .Na podstawie rys. 3 i 4, oraz wcze niejszych zało e wyznaczono współrz dne rodka masy
nadwozia., co w efekcie dało nast puj ce wyniki:
– masa całkowita nadwozia kgmN 1225= ; – współrz dne rodka masy wzgl dem punktu „origo”:
mzmymx ccc 454,0,081,0,481,1 === ; – warto ci momentów bezwładno ci dla nadwozia zaburzonego wzgl dem osi przechodz cych
przez punkt „origo”: 222 3297,3441,461 mkgImkgImkgI zzyyxx ⋅=⋅=⋅=
; – warto ci momentów dewiacji dla nadwozia zaburzonego wzgl dem osi przechodz cych przez
punkt „origo”: 222 455,824,148 mkgImkgImkgI yzzxxy ⋅=⋅=⋅=
.
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014

Jarosław Zalewski Wpływ zaburzenia rodka masy na stateczno pojazdu przy impulsowym zakłóceniu
ruchu prostoliniowego
166
Rys. 3. Rzut nadwozia modelu samochodu sportowego z góry
ródło: opracowanie własne.
Rys. 4. Rzut nadwozia modelu samochodu samochodu sportowego z boku
ródło: opracowanie własne.
2.3. Zaburzenia pochodz ce od nawierzchni drogi
Badanie stateczno ci technicznej stochastycznej przeprowadzono dla oblodzonej drogi płaskiej oraz dla drogi z losowo wyst puj cymi nierówno ciami nawierzchni, równie oblodzonej. Wyst -powanie tych zaburze zrealizowano zast puj c płask powierzchni drogi opisan plikiem „2d_flat.rdf”, prze plik „2d_stochastic_uneven.rdf” definiuj cym dany profil.
W badanym modelu matematycznym samochodu przeprowadzono pewn modyfikacj doty-cz c opon. Wykorzystano model opony FTIRE, który, ze wzgl du na losowy charakter nierówno ci, jest zdolny współpracowa z drog o takiej nawierzchni. Własno ci modeli opon stan-dardowo przypisanych do analizowanego modelu uniemo liwiaj przeprowadzenie symulacji na

167
profilu nawierzchni o losowych nierówno ciach, poniewa długo fali tych nierówno ci jest mniej-sza ni promie koła jezdnego [7].
Model opony FTRIE (ang. flexible tire ring) zło ony jest z odkształcalnych paneli poł czonych elementami spr ystymi, mog cych odkształca si w trzech wzajemnie prostopadłych kierunkach.
3. Badania symulacyjne stateczno ci technicznej stochastycznej modelu matematycznegosamochodu o nierównomiernym obci eniu
W celu przeprowadzenia symulacji przyj to nast puj ce zało enia: – model pojazdu traktowany jest jako ciało quasisztywne, za nadwozie jest reprezentowane
przez zbiór elementów prostopadło ciennych; – w procesach symulacyjnych wykorzystano model matematyczny samochodu, którego ele-
menty zawieszenia s nieliniowe; – losowo wyst puj ce nierówno ci nawierzchni drogi opisano procesem stochastycznym sta-
cjonarnym w szerszym sensie i globalnie ergodycznym; – realizuj c ruch pojazdu przyj to układy współrz dnych jak w pracy [4];– zaburzenie parametrów masowo – bezwładno ciowych realizowano poprzez nierównomierne
obci enie pojazdu (p. 3.1); – zakłócenie ruchu przy pr dko ci 70km/h zrealizowano poprzez wprowadzenie impulsowego
obrotu koła kierownicy o 90° w kierunku przeciwnym do ruchu wskazówek zegara. Symulacja przeprowadzona została dla dwóch konfiguracji: samochód obci ony kierowc , pa-
sa erem oraz baga em na oblodzonej płaskiej nawierzchni drogi, oraz na oblodzonej nawierzchni drogi z losowo wyst puj cymi nierówno ciami.
Wykorzystano manewr tzw. „impulse steer”, czyli odpowiedzi układu na pojedynczy, nagły obrót kołem kierownicy. Symulacja odbyła si na odcinku drogi o długo ci 107m.
Uzyskano po dwie trajektorie dla ka dego z opisywanych warunków ruchu: dla pojazdu z do-datkowo zaburzonym poło eniem rodka masy, oraz dla pojazdu bez zaburzenia. Ka dy zestaw zawiera trajektori dla manewru na drodze gładkiej oblodzonej oraz na drodze oblodzonej z losowo wyst puj cymi nierówno ciami.
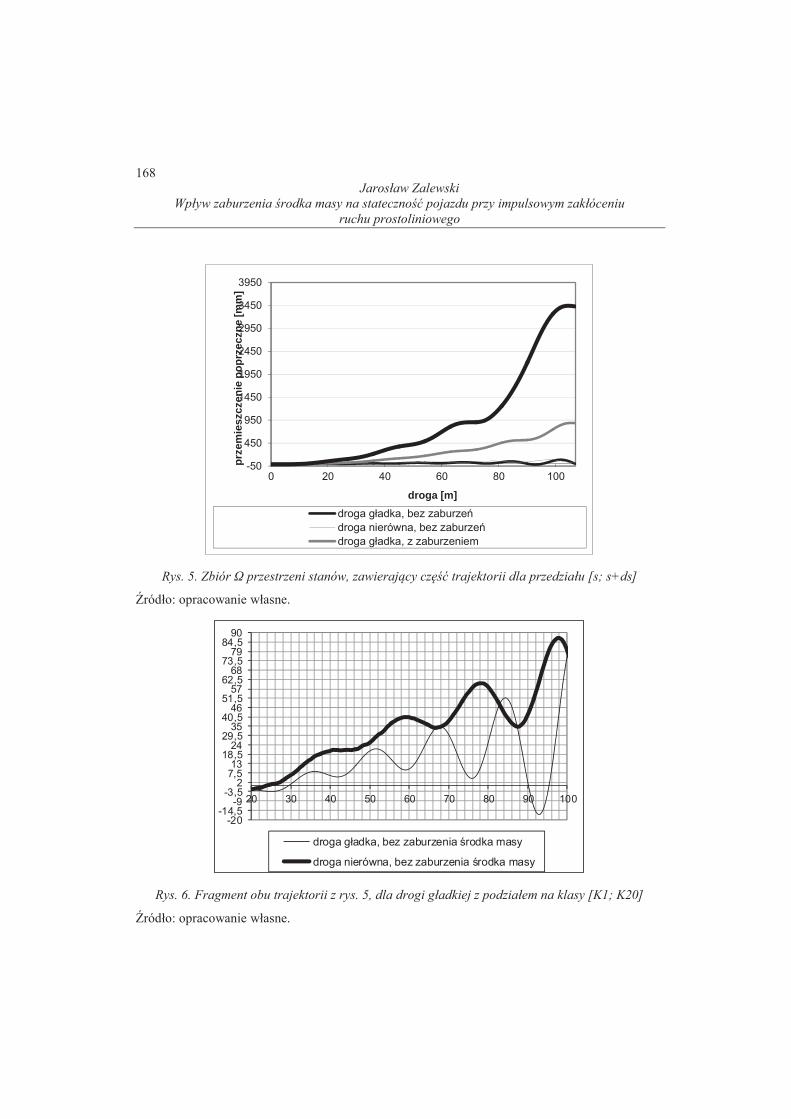
Na rys. 5 pokazano wszystkie cztery trajektorie jako zale no poprzecznego przemieszczenia pojazdu w funkcji przebytej drogi. Zaznaczono na nim równie zbiór przestrzeni stanów (zbiór rozwi za ). Zbiór ten zawiera cz trajektorii zwi zan z przedziałem [s; s+ds] dla odcinka drogi od 20 do 100m, dla którego badano niestateczno modelu pojazdu. Omawiany odcinek drogi został podzielony na 40 podprzedziałów, ka dy równy 2m.
Na rys. 6 pokazano wybrany fragment trajektorii dla ruchu pojazdu z niezaburzonym poło e-niem rodka masy. Odcinek ten na osi przemieszczenia poprzecznego podzielono na 20 klas [K1; K20], co 5,5mm. Zakres ten przypada na cz trajektorii, w której model samochodu, po wprowadzeniu impulsowego zakłócenia (obrót kołem kierownicy) usiłuje powróci do ruchu pro-stoliniowego.
Na rys. 7 zaprezentowano wycinek trajektorii dla ruchu modelu z zaburzonym, wskutek nie-równomiernego obci enia, poło eniem rodka masy. Zakres przemieszczenia poprzecznego dla tego fragmentu równie podzielono na 20 klas [K1; K20] z tym, e co 170mm.
Nast pnie zbadano cz sto ci przebywania rozwi zania w ka dej klasie.
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014
Jarosław Zalewski Wpływ zaburzenia rodka masy na stateczno pojazdu przy impulsowym zakłóceniu
ruchu prostoliniowego
168
-50
450
950
1450
1950
2450
2950
3450
3950
0 20 40 60 80 100
prze
mie
szcz
enie
pop
rzec
zne
[mm
]
droga [m]droga gładka, bez zaburzedroga nierówna, bez zaburzedroga gładka, z zaburzeniem
Rys. 5. Zbiór przestrzeni stanów, zawieraj cy cz trajektorii dla przedziału [s; s+ds]
ródło: opracowanie własne.
-20-14,5
-9-3,5
27,513
18,524
29,535
40,546
51,557
62,568
73,579
84,590
20 30 40 50 60 70 80 90 100
droga gładka, bez zaburzenia rodka masy
droga nierówna, bez zaburzenia rodka masy
Rys. 6. Fragment obu trajektorii z rys. 5, dla drogi gładkiej z podziałem na klasy [K1; K20]
ródło: opracowanie własne.

169
0170340510680850
102011901360153017001870204022102380255027202890306032303400
20 30 40 50 60 70 80 90 100
droga gładka, z zaburzeniem rodka masy
droga nierówna, z zaburzeniem rodka masy
Rys. 7. Fragment obu trajektorii z rys. 5 dla drogi nierównej z podziałem na klasy [K1; K20]
ródło: opracowanie własne.
4. Analiza otrzymanych rezultatów
Wyznaczono cz sto ci zdarze , czyli przebywanie rozwi zania w okre lonej klasie zbioru do-puszczalnych rozwi za . W ka dym kolejnym kroku przedziału [s; s+ds] zbadano cz sto ci zdarze wyst powania rozwi zania w danej klasie, przy czym za prac [8] przyj to drog jako zbiór okre lono ci układu (5).
NN
KW Kjj =)(
(5)gdzie:
– KjW– cz sto przebywania rozwi zania w danej klasie;
– KjN– ilo podprzedziałów, dla których rozwi zanie przebywa w danej klasie;
– N – ilo wszystkich podprzedziałów.Otrzymane warto ci cz sto ci zdarze przedstawiono w tab. 1. Celem oblicze było porówna-
nie cz sto ci wyst powania rozwi zania (trajektorii) w ka dej z przyj tych klas.
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014

Jarosław Zalewski Wpływ zaburzenia rodka masy na stateczno pojazdu przy impulsowym zakłóceniu
ruchu prostoliniowego
170
Tab. 1. Cz sto ci przebywania rozwi za w ka dej klasie dla obu przypadków z rys. 6 i 7
bez zaburzenia rodka masy z zaburzeniem rodka masy
droga gładka droga nierówna droga gładka droga nierówna
Klasa KjN KjW KjN KjW KjN KjW KjN KjW
1 1 0,025 0 0,000 16 0,400 6 0,150 2 1 0,025 0 0,000 11 0,275 5 0,125 3 0 0,000 0 0,000 5 0,125 6 0,150 4 6 0,150 3 0,075 6 0,150 2 0,050 5 7 0,175 2 0,050 2 0,050 3 0,075 6 7 0,175 1 0,025 0 0,000 6 0,150 7 3 0,075 2 0,050 0 0,000 2 0,050 8 4 0,100 6 0,150 0 0,000 1 0,025 9 3 0,075 1 0,025 0 0,000 1 0,025
10 3 0,075 4 0,100 0 0,000 0 0,000 11 0 0,000 8 0,200 0 0,000 1 0,025 12 3 0,075 3 0,075 0 0,000 1 0,025 13 1 0,025 1 0,025 0 0,000 0 0,000 14 0 0,000 2 0,050 0 0,000 1 0,025 15 0 0,000 3 0,075 0 0,000 1 0,025 16 0 0,000 0 0,000 0 0,000 0 0,000 17 0 0,000 1 0,025 0 0,000 1 0,025 18 1 0,025 0 0,000 0 0,000 1 0,025 19 0 0,000 2 0,050 0 0,000 1 0,025 20 0 0,000 1 0,025 0 0,000 1 0,025
ródło: opracowanie własne.

171
5. Wyniki bada stateczno ci technicznej stochastycznej modelu matematycznegosamochodu
Badania stateczno ci technicznej stochastycznej modelu samochodu dokonano porównuj c tra-jektorie ruchu oraz cz sto ci zdarze wyst powania rozwi zania w okre lonym wycinku obszaru drogi.
Je li zgodnie z rys. 6 i 7 obszar, w którym mo e znajdowa si trajektoria podzieli na 20 rów-nych przedziałów, to dla odcinka [s; s+ds] mo na zaobserwowa wpływ warunków drogowych i obci enia pojazdu na jej przebieg. Dla tak przyj tych warunków trajektorie po omini ciu prze-szkody mieszcz si w obszarze . Za obszar ten mo na przyj np. szeroko dwóch pasów ruchu, przy czym nale y uwzgl dni , e trajektorie zostały wyznaczone dla rodka masy układu sztywnego. Nale y zatem doda szeroko pasów ruchu obejmuj c szeroko pojazdu. Je eli natomiast zaw -onoby obszar do ok. 3m (jeden pas ruchu), to ruch pojazdu z zaburzonym poło eniem rodka
masy na drodze nierównej (rys.7) mógłby zosta uznany za niestateczny. Maksymalne warto ci amplitud trajektorii samochodu bez i z zaburzeniami poło enia rodka
masy s , w pobli u granicy stateczno ci. Jedynie dla ruchu na nierównej nawierzchni drogi i przy nierównomiernym obci eniu trajektoria wykracza poza przyj ty obszar stateczno ci. Sposób okre-slania obszaru stateczno ci dla manewru podwójnej zmiany pasa ruchu został opisany w pracy [8].
W tab. 1 pokazano zestawienie oblicze dla ruchu na nawierzchni oblodzonej. Istotne ró nice dla ruchu pojazdu bez zaburzonego poło enia rodka masy wyst puj w klasach:
– 4 – odpowiednio 0,15 na drodze gł dkiej i 0,075 na nierównej;– 5 – odpowiednio 0,175 na drodze gł dkiej i 0,05 na nierównej;– 6 – odpowiednio 0,175 na drodze gł dkiej i 0,025 na nierównej;– 11 – odpowiednio 0 na drodze gł dkiej i 0,2 na nierównej;Dla ruchu pojazdu z zaburzonym rodkiem masy: – 1 – odpowiednio 0,4 na drodze gł dkiej i 0,15 na nierównej;– 2 – odpowiednio 0,275 na drodze gł dkiej i 0,125 na nierównej;– 6 – odpowiednio 0 na drodze gł dkiej i 0,15 na nierównej.Maksymalna wielko amplitudy trajektorii samochodu na drodze gładkiej dla klasy 20 jest
w obu przypadkach równa zeru, natomiast na drodze nierównej wynosi 0,1. Zaburzenie poło enia rodka masy w poł czeniu z ekstremalnym warunkami drogowymi istot-
nie wpływa zatem zarówno na maksymalne wielko ci amplitud trajektorii, jak i na cz sto ci zdarzewyst powania rozwi zania w klasach dla du ych amplitud trajektorii.
6. Porównanie stateczno ci modeli matematycznych ze stateczno ci obiektów rzeczywistych
Poj cia stateczno ci samochodu dla analizy ruchu obiektu rzeczywistego zostały przedstawione w normie ISO 8855:1991. W normie tej stan ustalony okre lono jako stan pojazdu, w którym suma przyło onych zewn trznych sił i momentów, a tak e równowa cych je sił bezwładno ci i momen-tów tworzy układ niezmienny. Stan przej ciowy opisany został jako inne stany ni opisany powy ej.
Podane normie definicje mo na porówna ze stateczno ci zdefiniowan , dla modelu matema-tycznego. Bior c pod uwag charakter odpowiedzi układu na wymuszenie mo na wyci gnz porównania definicji nast puj ce wnioski.
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014

Jarosław Zalewski Wpływ zaburzenia rodka masy na stateczno pojazdu przy impulsowym zakłóceniu
ruchu prostoliniowego
172
Otrzymane rozwi zania, z których rozwi zanie dla modelu bez zaburze poło enia rodka masy mo nby uzna za wyj ciowe, lub stan ustalony, mo na porówna z definicjami stateczno ci oboj t-nej pod warunkiem, e przyj te zaburzenia b d mie małe warto ci, a dodatkowe wymuszenie obrotem koła kierownicy nie spowoduje wzmocnienia odpowiedzi modelu. Ma to miejsce dla tra-jektorii modelu bez zaburze poło enia rodka masy. W przypadku nierównomiernego jej rozkładu mo na mówi o niestateczno ci nieokresowej dla rzeczywistych pojazdów (wzmocnienie odpowie-dzi układu).
Nie mo na natomiast odnie otrzymanych rozwi za ani do stateczno ci okresowej, ani do oscylacyjnej ze wzgl du na charakter ich wzajemnego przebiegu.
7. Wnioski
Celem pracy było pokazanie wybranych aspektów dotycz cych bezpiecze stwa ruchu drogo-wego.
Na podstawie symulacji ruchu pojazdu z niezaburzonym i zaburzonym poło eniem rodka masy w programie Adams/Car otrzymano trajektorie ruchu w dwóch ró nych warunkach drogowych, ale przy nawierzchni oblodzonej. Wykazano, e niewielkie na pozór zaburzenie poło enia rodka masy ma tym wi kszy wpływ na stateczno techniczn stochastyczn ruchu samochodu, im trudniejsze panuj warunki drogowe, z punktu widzenia jako ci nawierzchni. Ponadto krzywe te posłu yły do odniesienia si do stateczno ci samochodów wg normy ISO 8855:1991.
W zakres dalszych bada mo e wej prowadzenie analiz zwi zanych dodatkowo z warunkami atmosferycznymi w szerszym aspekcie (droga sucha i mokra), oraz z zaburzeniami wynikłymi np. z niepoprawnej geometrii elementów zawieszenia modelu pojazdu.
Bibliografia
1. Bogusz W., Stateczno techniczna, Warszawa 1972, PWN.2. Kisilowski J., Kardas-Cinal E., On a Certain Method of Examining Stability of Mathematical
Models of railway Vehicles with Disturbances Occurring in Real Objects, VSD Suplementto vol. 23, Proceedings of 13th IAVSD Symposium held in Chengdu, Sichuan, P. R. China,August 23 – 27, 1993.
3. Kisilowski J., Choroma ski W., Łopata H., Investigation of Technical Stochastic Stability ofLateral Vibrations of Mathematical Model of Rail Vehicle, Engineering Transactions, PolishAcademy of Sciences – IPPT, Vol.33, Warsaw 1985.
4. Kisilowski J., Zalewski J., On a certain possibility of practical application of stochastic tech-nical stability, Eksploatacja i niezawodno , Maintenance and Reliability, 1(37)/2008.
5. Nabagło T., Synteza układu sterowania semiaktywnego zawieszenia samochodu podzespo-łów elementami magnetoreologicznymi, Rozprawa doktorska, Politechnika Krakowska,Kraków 2006.
6. Ng Luke, Reinforcement learning of dynamic collaborative driving, Doctoral thesis, Water-loo, Ontario, Canada 2008.
7. Using Adams, MSC Software Corporation.8. Zalewski J., Modelowanie wpływu zaburze geometrii nadwozia na stateczno ruchu po-
jazdu samochodowego, Rozprawa doktorska, Politechnika Warszawska, 2011.

173
INFLUENCE OF THE CENTER OF MASS DISTURBANCE ON THE STABILITY OF A VEHICLE AFTER THE IMPULSE DISRUPTION OF ITS STRAIGHT-LINE MOTION
Summary Analysis of the influence of the center of mass disturbance on the stability of a mo-
tor vehicle mathematical model was prepared, at a sudden disruption of its straight-line motion by the impulse rotation of the steering wheel, as well as randomly occur-ring unevenness of the road surface.
The issue was considered basing on the definition of the stochastic technical stability, analysing the probability of the vehicle trajectory remaining in a particular area of the road. Attempt was also made to compare the obtained results with the definition of stability for the real vehicles (ISO 8855).
Simulation was conducted for the vehicle model in MSC Adams/Car software for difficult road conditions, at the speed of 70km/h The results can also be used as a com-ponenet qualifying the versatility of the presented method.
Keywords: stability, the center of mass of a motor vehicle, motion disruption
Jarosław Zalewski Wydział Administracji i Nauk Społecznych Politechnika Warszawska Pl. Politechniki 1, 00-661 Warszawa e-mail: [email protected]
Studies & Proceedings of Polish Association for Knowledge Management Nr 70, 2014









![DANE IDENTYFIKACYJNE POJAZDU - Idea Getin · Zadanie: Ocena stanu technicznego i określenie wartości rynkowej pojazdu DANE IDENTYFIKACYJNE POJAZDU Dane: [C] III-2020 Marka: MERCEDES-BENZ](https://static.fdocuments.pl/doc/165x107/6000e21ce6bda277e432a9a0/dane-identyfikacyjne-pojazdu-idea-getin-zadanie-ocena-stanu-technicznego-i-okrelenie.jpg)