Podstawy automatyki i robotyki - Politechnika...
75
Podstawy Podstawy automatyki i robotyki automatyki i robotyki Specjalności okrętowe St. niestacjonarne St. niestacjonarne Sem. III Wykład Sem. 1-2013/14 Hossein Ghaemi
Transcript of Podstawy automatyki i robotyki - Politechnika...
PodstawyPodstawyautomatyki i robotykiautomatyki i robotyki
Specjalności okrętoweSt. niestacjonarneSt. niestacjonarneSem. IIIWykład
Sem. 1-2013/14Hossein Ghaemi
Hossein GhaemiKatedra Energetyki i Automatykig y y
Wydział Oceanotechniki i OkrętownictwaPolitechnika Gdańska
pok. 188 WOiOTel.: 58 348 6053Tel.: 58 348 6053
e-mail: [email protected] pg gda pl/~ghaemiwww.pg.gda.pl/ ghaemi
Konsultacje: wtorek 12.00-12.55
Podstawy automatyki i robotyki
Tematyczny zakres przedmiotu1 POJĘCIA PODSTAWOWE1. POJĘCIA PODSTAWOWE
Sprzężenie zwrotne – podstawowy mechanizm sterowania, techniczne problemy projektowania układów sterowania.
2. KLASYFIKACJA UKŁADÓW STEROWANIAUkłady sterowania liniowe i nieliniowe, układy sterowania o parametrach skupionych i rozłożonych, układy sterowania stacjonarne i niestacjonarne, układy sterowania jednowymiarowe i wielowymiarowe, układy sterowania o działaniu ciągłymi dyskretnym, układy sterowania optymalne, układy sterowania adaptacyjne, układy sterowania ekstremalne.
3. ELEMENTY UKŁADÓW AUTOMATYKIRównanie podstawowych elementów liniowych, elementy powodujące straty energii, elementy magazynujące energię potencjalną, elementy magazynujące energię kinetyczną, wprowadzenie równań układów dynamicznych, równanie Lagrange’a, linearyzacja.g g , y j
4. FUNKCJA PRZEJŚCIARodzaje modeli matematycznych równanie różniczkowe, transformacja Laplace’a, transmitancja, rozwiązanie równań różniczkowych, odpowiedzi czasowe, charakterystyki skokowe i impulsowe.
5. SCHEMATY BLOKOWEZwiązek pomiędzy schematem blokowym a równaniem różniczkowym, związek pomiędzy równaniem różniczkowyma transmitancją, związek pomiędzy schematem blokowym a transmitancją, połączenie równoległe, połączenie szeregowe, połączenie ze sprzężeniem zwrotnym, algebra schematów blokowych.
6. ANALIZA UKŁADÓW STEROWANIA W PRZESTRZENI STANUPrzestrzeń stanu, stan otoczenia, rozwiązanie liniowego równania różniczkowego, model stacjonarny, model
Podstawy automatyki i robotyki
niestacjonarny, zastosowanie transformacji Laplace’a do rozwiązania równań stanu i obserwacji, macierz transmitancji układu sterowania w metodzie przestrzeni stanu.
Tematyczny zakres przedmiotu7. METODA CZĘSTOTLIWOŚCIOWA OPISU I ANALIZY UKŁADÓW STEROWANIA
Transmitancja widmowa, charakterystyki A-F Nyquist’a, logarytmyczne charakterystyki Bodego, pasmo przenoszenia.
8. STABILNOŚĆ UKŁADÓW STEROWANIADefinicje i pojęcia, stabilność w sensie Lapunov’a, kryterium stabilności Hurwitza, kryterium stabilności Nyquista, zapas amplitudy, zapas fazy.
9 REGULATORY9. REGULATORYRodzaje działania regulatorów, struktura regulatorów, zastosowanie sprzężenia zwrotnego w kształtowaniu charakterystyki regulatora, kształtowanie charakterystyki regulatora w układzie równoległym, kształtowanie charakterystyki regulatora w czujniku lub wzmacniaczu, dobór
l t l d k t bil ś i kł d t iregulatora ze względu na warunek stabilności układu sterowania.10. WSKAŹNIKI JAKOŚCI STEROWANIA
Uchyb ustalony , proces przejściowy, Kryteria całkowe, kryterium całki kwadratu uchybu, kryterium całki ważonego kwadratu uchybu, Kryterium całki wartości bezwzględnej uchybu, y g y , y g ę j y ,kryterium całki ważonej wartości bezwzględnej uchybu, metoda Zieglera-Nicholsa doboru nastawień regulatora.
11. DYSKRETNE UKŁADY STEROWANIATransformacja z” transformacja z” sygnału wyjściowego układu sterowania odwrotnaTransformacja „z , transformacja „z sygnału wyjściowego układu sterowania, odwrotna transformacja „z”, analiza stabilności na płaszczyźnie „z”, przetwornik analogowo-cyfrowy, przetwornik cyfrowo-analogowy.
12. NIELINIOWE UKŁADY STEROWANIA
Podstawy automatyki i robotyki
Funkcja opisująca, stabilność układów nieliniowych, płaszczyzna fazowa i portret fazowy.
LiteraturaBubnicki Z., Teoria i algorytmy sterowania, Wydawnictwo Naukowe PWN, Warszawa, 2002.2. Domachowski Z., Automatyka i robotyka – podstawy, Wydawnictwo PG, Gdańsk, 2003.3. Friedland B., Control System Design, McGraw Hill Co., 1986.4. Kaczorek T., Teoria sterowania i systemów, Wydawnictwo Naukowe PWN, Warszawa, 1999.5. Nise N. S., Control System Engineering, John Whiley & Sons Inc., 2008.6 O t K M d C t l E i i 4th diti P ti H ll 20026. Ogata K., Modern Control Engineering, 4th edition, Prentice Hall, 2002.7. Perycz S., Podstawy automatyki, skrypt dla Instytutu Okrętowego PG, Gdańsk, 1983.8. Próchnicki W., Dzida M., Zbiór zadań z podstaw automatyki, skrypt dla studentów Wydziału Oceanotechniki i Okrętownictwa PG Gdańsk 1993Wydziału Oceanotechniki i Okrętownictwa PG, Gdańsk, 1993.9. Raven, F. H., Automatic control engineering, McGraw Hill Co., 1986.
Podstawy automatyki i robotyki
Zasady zaliczenia2 pisemne kolokwia, 2x50 pkt.Obecność i aktywność: 5 pktObecność i aktywność: 5 pkt.Suma: 105 pkt.Ocena = 'suma pkt.'/20, przy minimum: 51 pkt.p p y p
Podstawy automatyki i robotyki
TerminySesja podstawowa:Kolokwium I (50 pkt.): 8.12.2013, godz. 08.15Kolokwium I (50 pkt.): 8.12.2013, godz. 08.15Kolokwium II (50 pkt.): 2.02.2014, godz. 08.30
Kolokwium końcowe (100 pkt.): 9.02.2014, godz. 08.30
Sesja poprawkowa:Sesja poprawkowa:Kolokwium poprawkowe (100 pkt.), 16.02.2014, godz. 8.30
Podstawy automatyki i robotyki

Układy otwartey
Podstawy automatyki i robotyki
Regulacja automatyczne?g j y
Podstawy automatyki i robotyki
Zamknięty układ sterowania ze sprzężeniem zwrotnymsprzężeniem zwrotnym?sprzężeniem zwrotnymsprzężeniem zwrotnym?
1. Procesy nie są dokładnie znane2 Nie zawsze można dokładnie określić2. Nie zawsze można dokładnie określić
wartość syg. wej. - niepewność3 Brak możliwości wprowadzenia syg wej3. Brak możliwości wprowadzenia syg. wej.
w sposób dokładny
Podstawy automatyki i robotyki

Sprzężenie zwrotne w naturzeSprzężenie zwrotne w naturze
Podstawy automatyki i robotyki
Regulacja źrenice Regulacja cukru

Sprzężenie zwrotne w techniceSprzężenie zwrotne w technice
Regulacja prędkości kątowejsilnika elektrycznego
Regulacja kursu i trajektorii
Podstawy automatyki i robotyki
y g
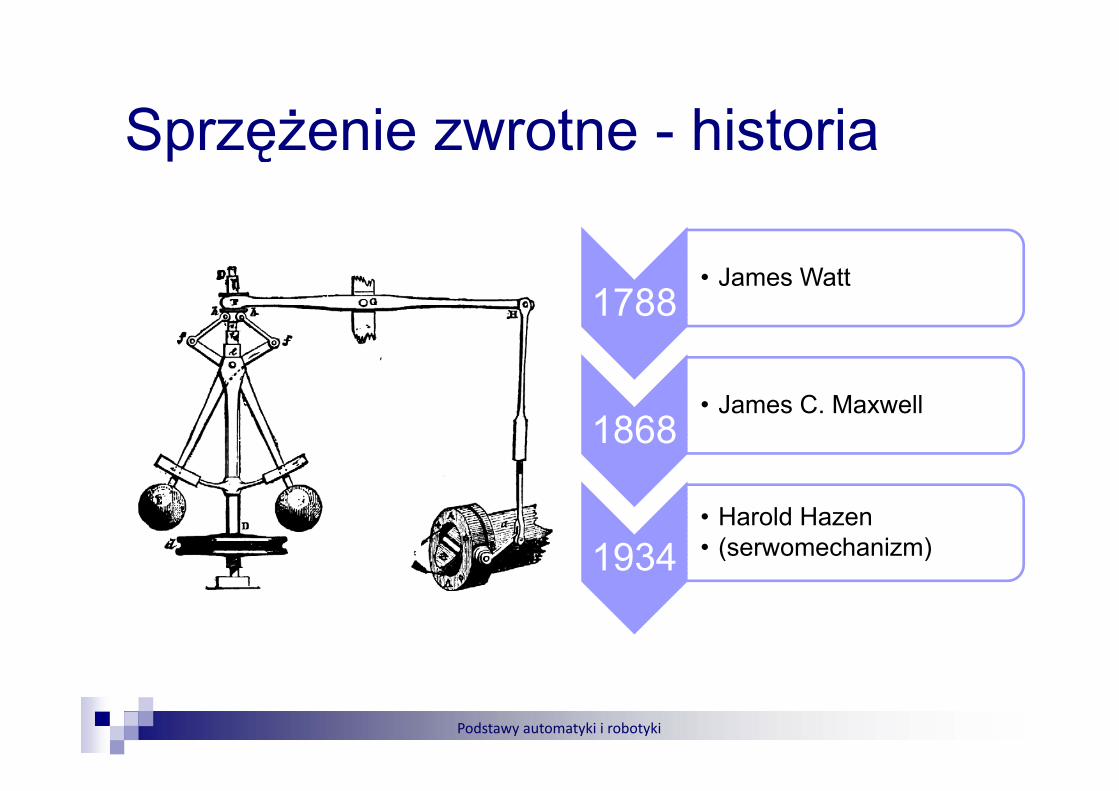
Sprzężenie zwrotne historiaSprzężenie zwrotne - historia
1788• James Watt
1788
J C M ll1868
• James C. Maxwell
1934• Harold Hazen• (serwomechanizm)
Podstawy automatyki i robotyki

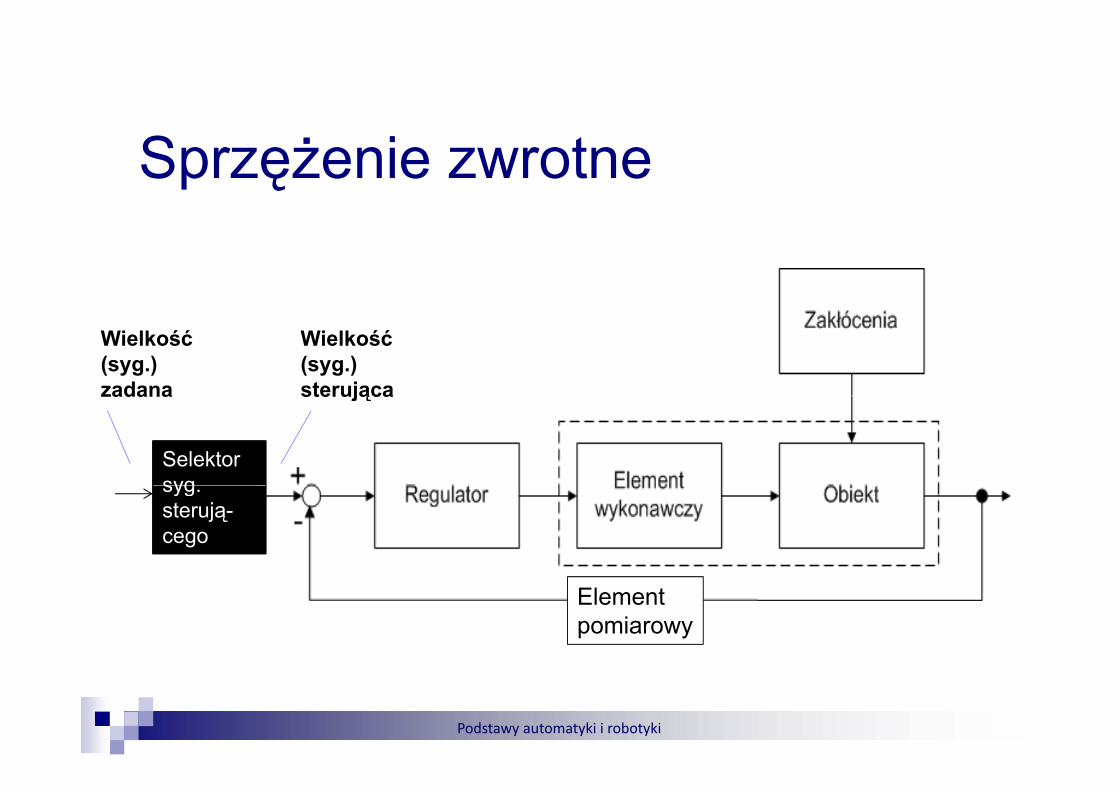
Sprzężenie zwrotne
Wielkość (syg )
Wielkość (syg.)nastawiana
Energia zew.
Wielkość (syg.) regulowana
(syg.)zadana Uchyb
regulacji
Mierzona wartość sygMierzona wartość syg. regulowanego (np. syg. elektryczny)
Podstawy automatyki i robotyki
Energia zew.
Sprzężenie zwrotne
Wielkość (syg.)zadana
Wielkość (syg.) sterująca
Selektorsyg
zadana sterująca
syg. sterują-cego
Element pomiarowy
Podstawy automatyki i robotyki
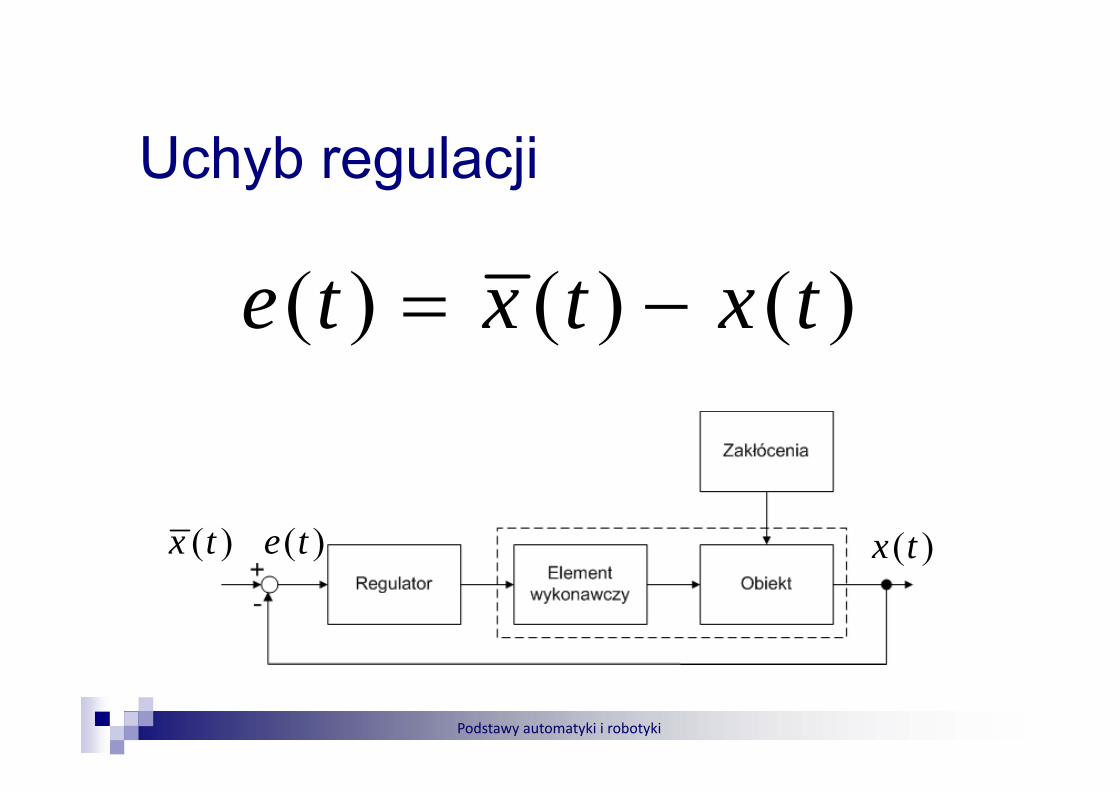
Uchyb regulacji
)()()( txtxte −= )()()( txtxte −=
)(te)(tx )(tx
Podstawy automatyki i robotyki
Możliwości układu sterowania
Wzmocnienie energetyczneZdalne sterowanieOddziaływanie na wej.Oddziaływanie na wej.Kompensacja zakłóceńD i ł i ś d i k i b iDziałanie w środowisku niebezpiecznym Działanie w środowisku niedostępnymDziałanie w środowiskach małej skali
Podstawy automatyki i robotyki
Etapy projektowania układu sterowania
1. Modelowanie oraz identyfikacja i weryfikacja modelu obiektu2 Symulacja obiektu2. Symulacja obiektu3. Struktura układu sterowania4. Typ i struktura regulatora5. Elementy pomiarowe (czujniki, przetworniki, interfejsy
komunikacyjne)6 Element wykonawczy6. Element wykonawczy7. Symulacja działania układu sterowania8. Prototypyp
Podstawy automatyki i robotyki
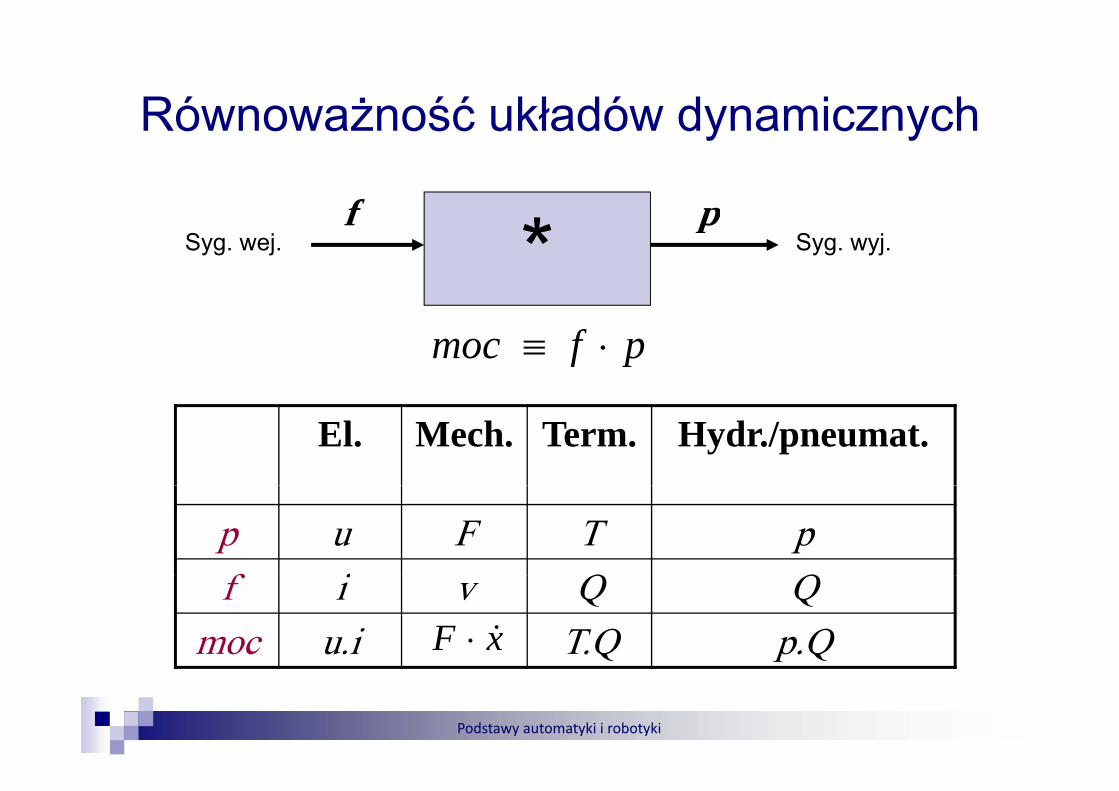
Równoważność układów dynamicznychRównoważność układów dynamicznych
f p*f pSyg. wej. Syg. wyj.
pfmoc ⋅≡
El. Mech. Term. Hydr./pneumat.
p u F T pf i Q Qf i v Q Q
moc u.i T.Q p.QxF &⋅
Podstawy automatyki i robotyki
Klasyfikacja układów sterowania (wykorzystujących mechanizm sprzężenia zwrotnego)
1 Typ zadań regulacyjnych (stałowartościowy1. Typ zadań regulacyjnych (stałowartościowy, programowy, nadążny)
2 Liczba syg regulowanych (jedno lub wielowymiarowe)2. Liczba syg. regulowanych (jedno lub wielowymiarowe)3. Rodzaj elementów (lin., nielin.)4 Rodzaj parametrów (skupionych przestrzennie4. Rodzaj parametrów (skupionych, przestrzennie
rozłożonych)5 Zmienność parametrów w czasie (stacjonarny,5. Zmienność parametrów w czasie (stacjonarny,
niestacjonarny)6. Ciągłość w czasie (ciągły, dyskretny)ąg ( ąg y, y y)7. Algorytm sterowania (optymalny, adaptacyjny,
ekstremalny)
Podstawy automatyki i robotyki
…
Charakterystyki układu sterowania
Charakterystyka y ydynamicznaCharakterystykaCharakterystyka statycznaCharakterystykaCharakterystyka częstotliwościowa
Podstawy automatyki i robotyki
Model matematyczny
Model strukturalnyIdentyfikacjaRównania zachowania masy pędu i energiiRównania zachowania masy, pędu i energiiRównanie Lagrange’aPostaci równania różniczkowego
Podstawy automatyki i robotyki
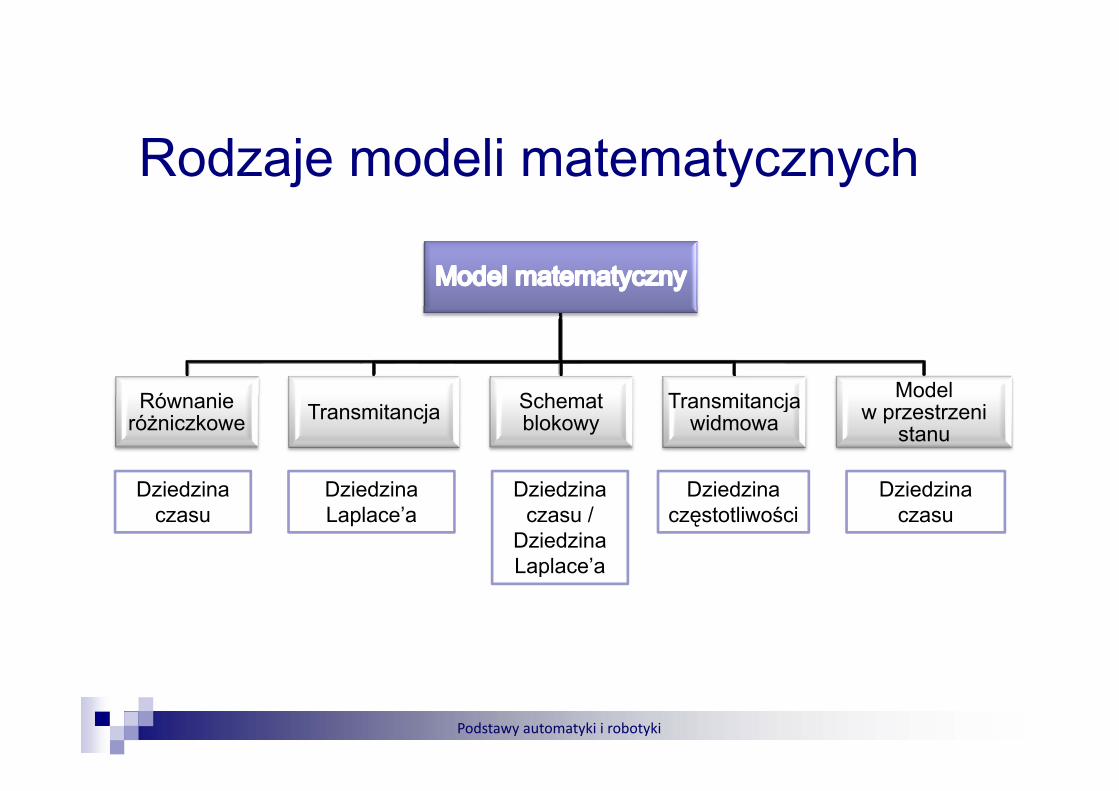
Rodzaje modeli matematycznych
Ró i S h t T it j ModelRównanie różniczkowe Transmitancja Schemat
blokowyTransmitancja
widmowaModel
w przestrzeni stanu
D ied ina D ied ina D ied ina D ied ina D ied inaDziedzina czasu
Dziedzina Laplace’a
Dziedzina czasu /
Dziedzina Laplace’a
Dziedzina częstotliwości
Dziedzina czasu
p
Podstawy automatyki i robotyki
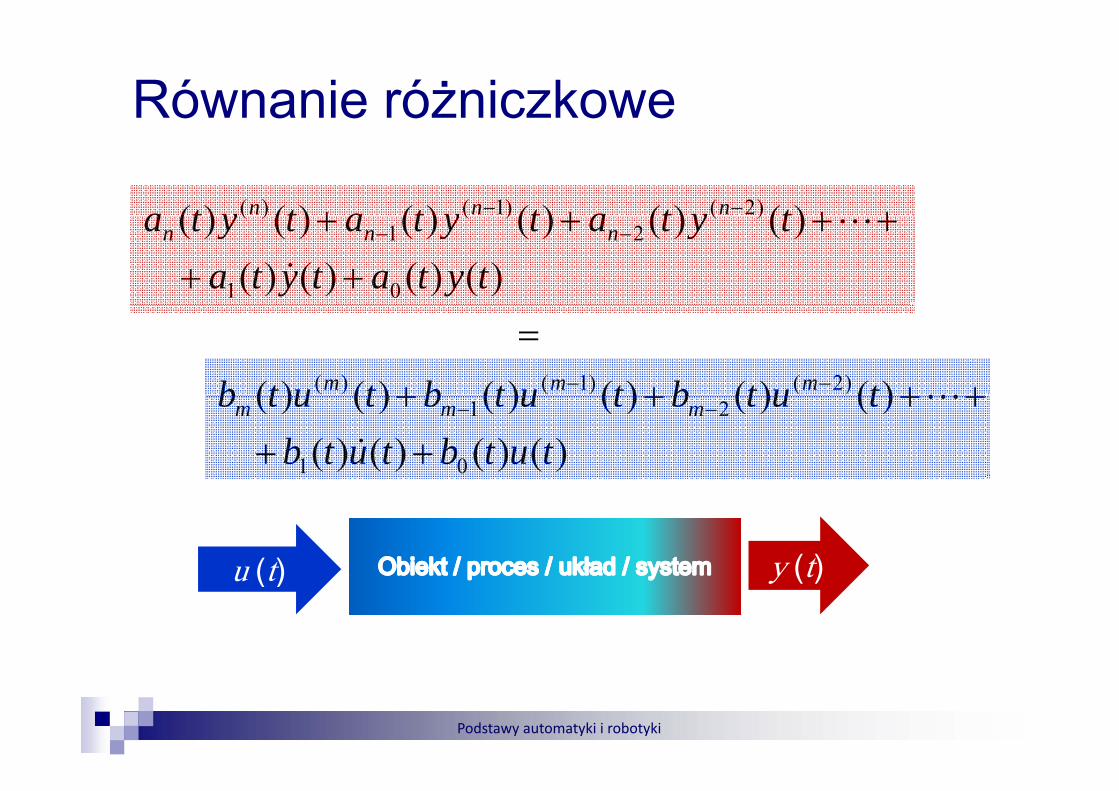
Równanie różniczkowe
)()()()()()( )2()1()( tytatytatyta nnn ++++ −−
)()()()()()()()()()(
01
)(2
)(1
)(
tytatytatytatytatyta nnn
++++++ −−
&
L
)()()()()()( )2()1()( tutbtutbtutb mmm ++++
=−− L
)()()()()()()()()()(
01
21
tutbtutbtutbtutbtutb mmm
++++++ −−
&
L
y (t)u (t) y (t) u (t)
Podstawy automatyki i robotyki
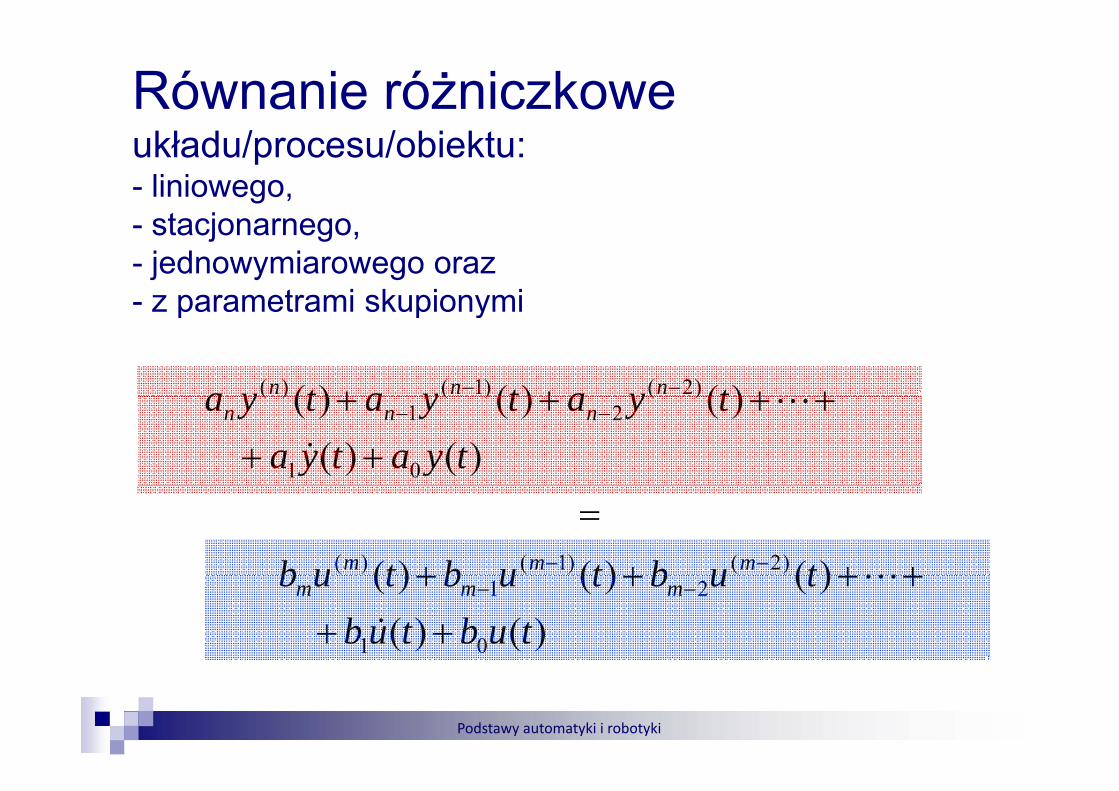
Równanie różniczkoweukładu/procesu/obiektu:- liniowego,
t j- stacjonarnego,- jednowymiarowego oraz- z parametrami skupionymiz parametrami skupionymi
)()()( )2()1()( tyatyatya nnn ++++ −−
)()()()()(
01
)(2
)(1
)(
tyatyatyatyatya nnn
++++++ −−
&
L
)()()( )2()1()( tubtubtub mmm ++++
=−− L
)()()()()(
01
21
tubtubtubtubtub mmm
++++++ −−
&
L
Podstawy automatyki i robotyki
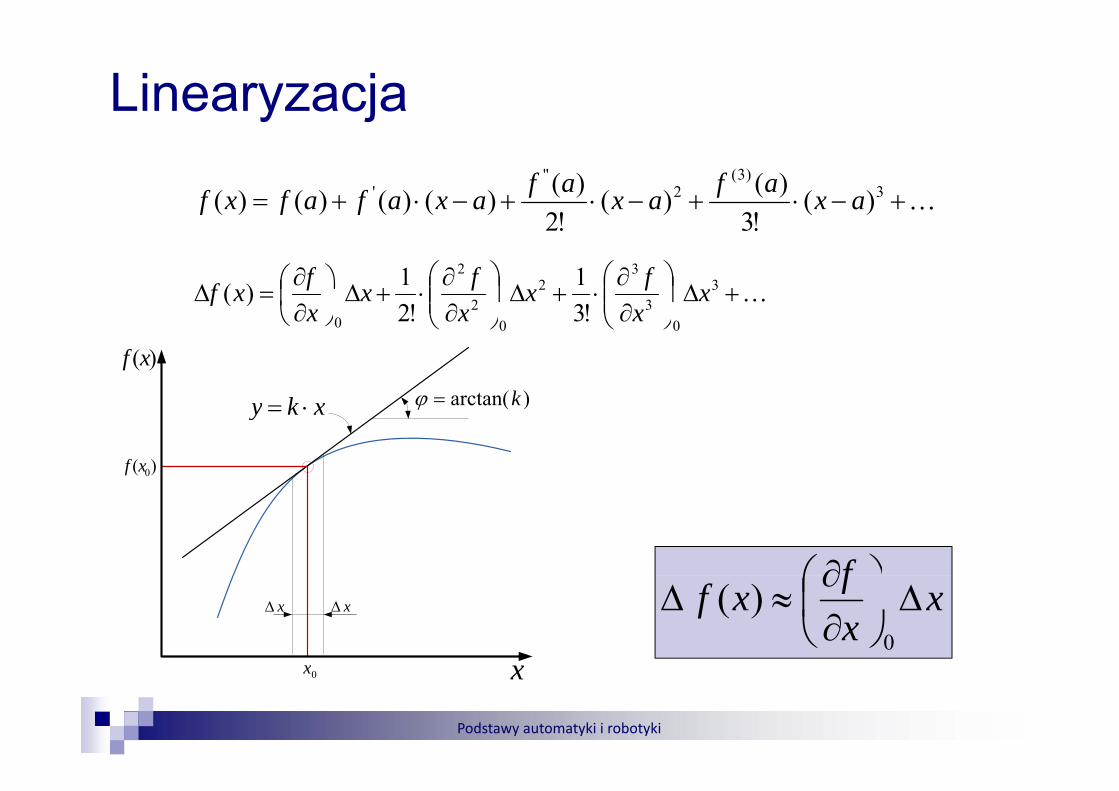
Linearyzacja
K+−⋅+−⋅+−⋅+= 3)3(
2"
' )(!3
)()(!2
)()()()()( axafaxafaxafafxf!3!2
K+Δ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⋅+Δ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⋅+Δ⎟⎠⎞
⎜⎝⎛∂∂
=Δ 33
32
2
2
!31
!21)( xfxfxfxf
)(xf
)arctan(kϕ
⎟⎠
⎜⎝ ∂
⎟⎠
⎜⎝ ∂⎠⎝ ∂ 0
30
20 !3!2
)(xxx
f
)( 0xf
)arctan(k=ϕxky ⋅=
f ⎞⎛ ∂xΔ xΔ x
xfxf Δ⎟⎠⎞
⎜⎝⎛∂∂
≈Δ0
)(
Podstawy automatyki i robotyki
0x x
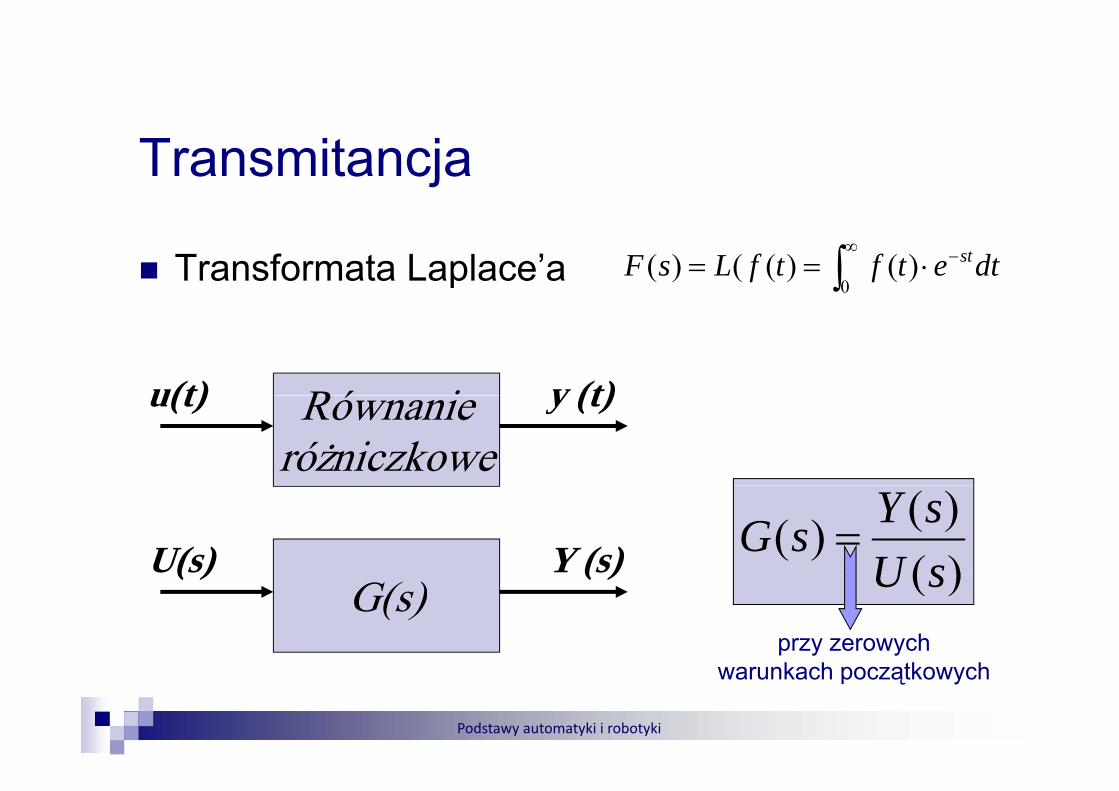
Transmitancja
Transformata Laplace’a dtetftfLsF st∫∞ −⋅==
0)()(()(
Ró iu(t) y (t)Równanieróżniczkowe
u(t) y (t)
U(s) Y (s) )()()(
sUsYsG =
G(s)( ) ( ) )(sU
przy zerowychk h tk h
Podstawy automatyki i robotyki
warunkach początkowych
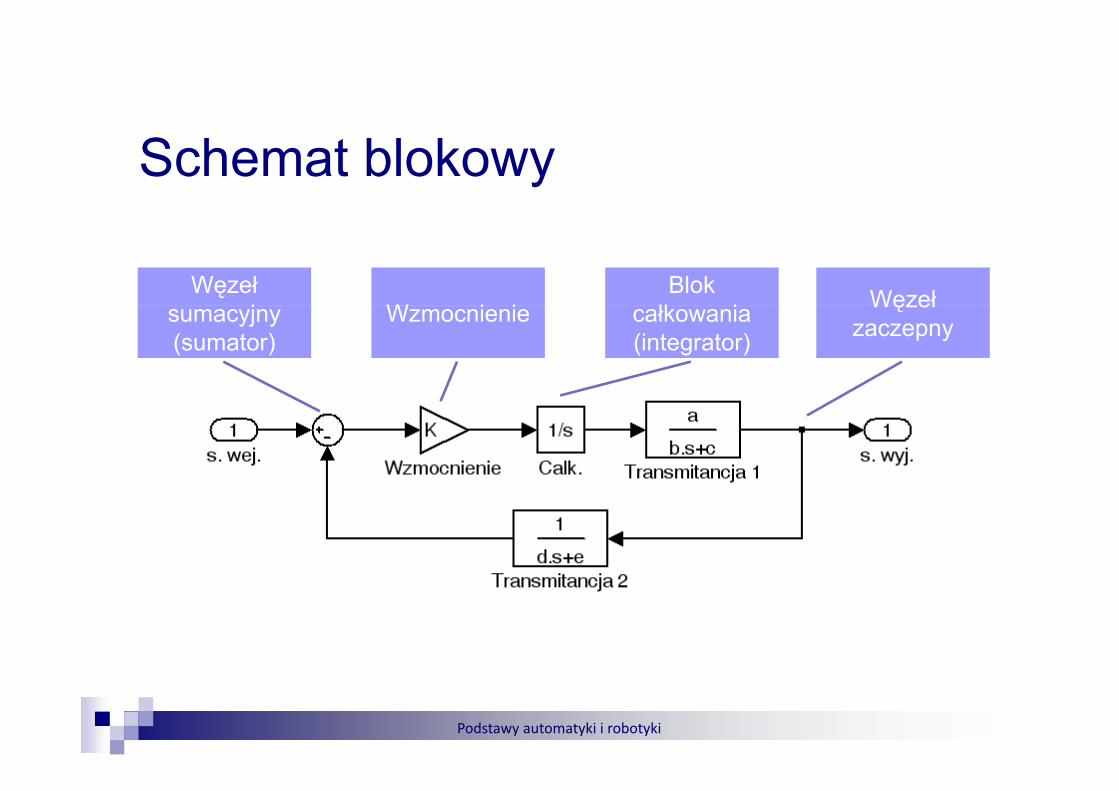
Schemat blokowy
Węzeł j W i i
Blok łk i Węzełsumacyjny
(sumator)Wzmocnienie całkowania
(integrator)
Węzeł zaczepny
Podstawy automatyki i robotyki
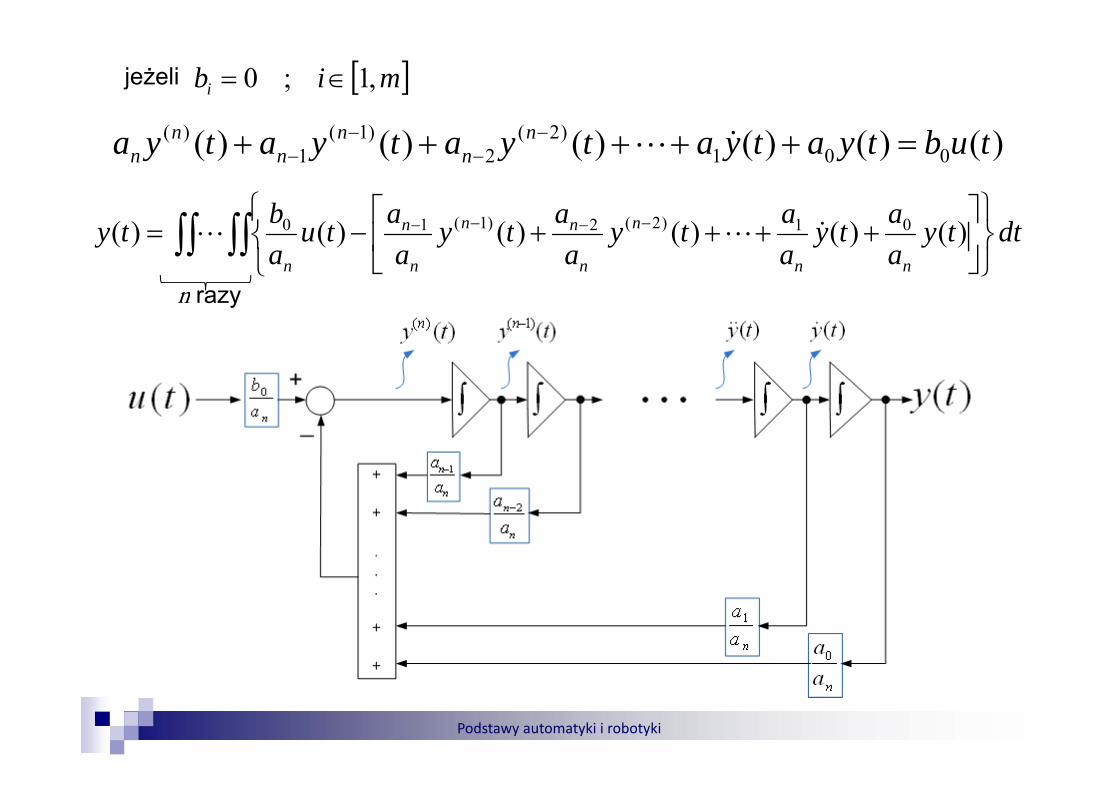
)2()1()(
[ ]mibi ,1;0 ∈=jeżeli
)()()()()()( 001)2(
2)1(
1)( tubtyatyatyatyatya n
nn
nn
n =+++++ −−
−− &L
aaaab∫∫∫∫
⎫⎧ ⎤⎡dtty
aaty
aaty
aaty
aatu
abty
nn
n
n
nn
n
n
n∫∫∫∫
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡++++−= −−−− )()()()()()( 01)2(2)1(10 &LL
n razyy
Podstawy automatyki i robotyki
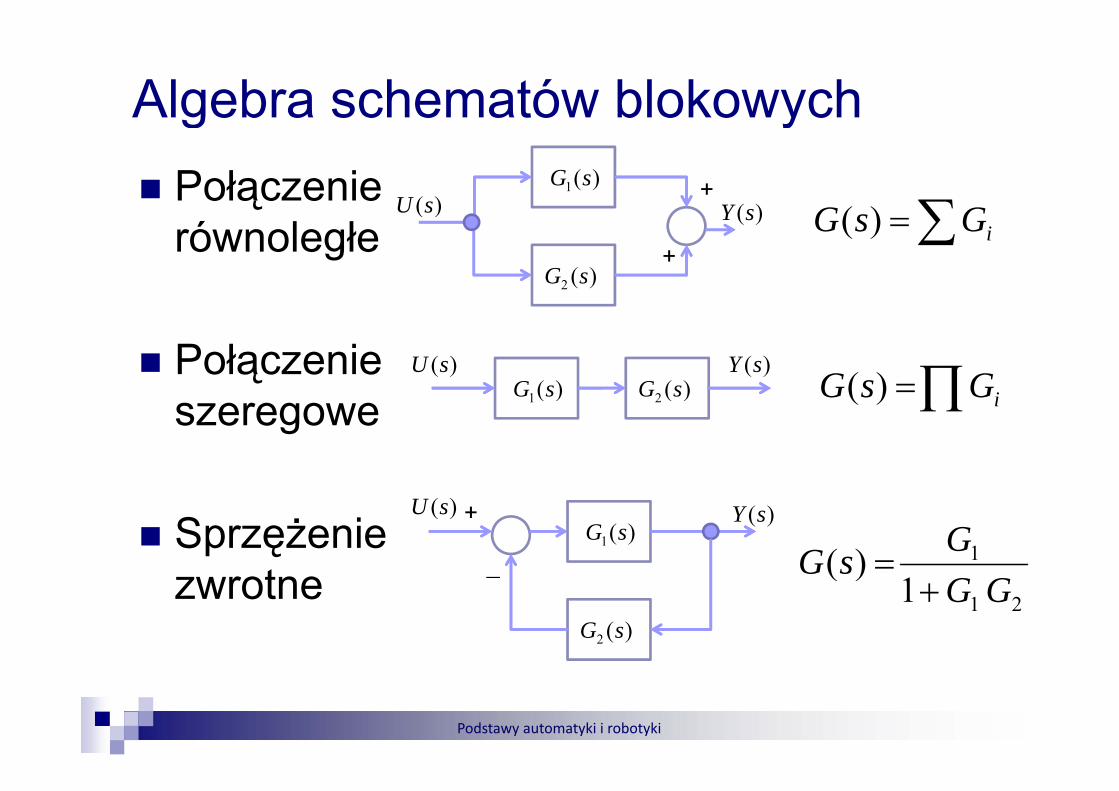
Algebra schematów blokowychPołączenie
g y)(1 sG +)(sU )(sY ∑GsG )(równoległe)(2 sG
+
)( )(sY ∑= iGsG )(
Połączenie)(1 sG )(2 sG
)(sU )(sY∏= iGsG )(szeregowe
)(1 sG )(2 sG ∏ iGsG )(
Sprzężeniet
)(1 sG+)(sU )(sY
1)( GsG =zwrotne)(2 sG
_211
)(GG+
Podstawy automatyki i robotyki
PodstawyPodstawyautomatyki i robotykiautomatyki i robotyki
EnergetykaSem. VSem. VWykład(część druga)
Sem. 1-2013/14Hossein Ghaemi
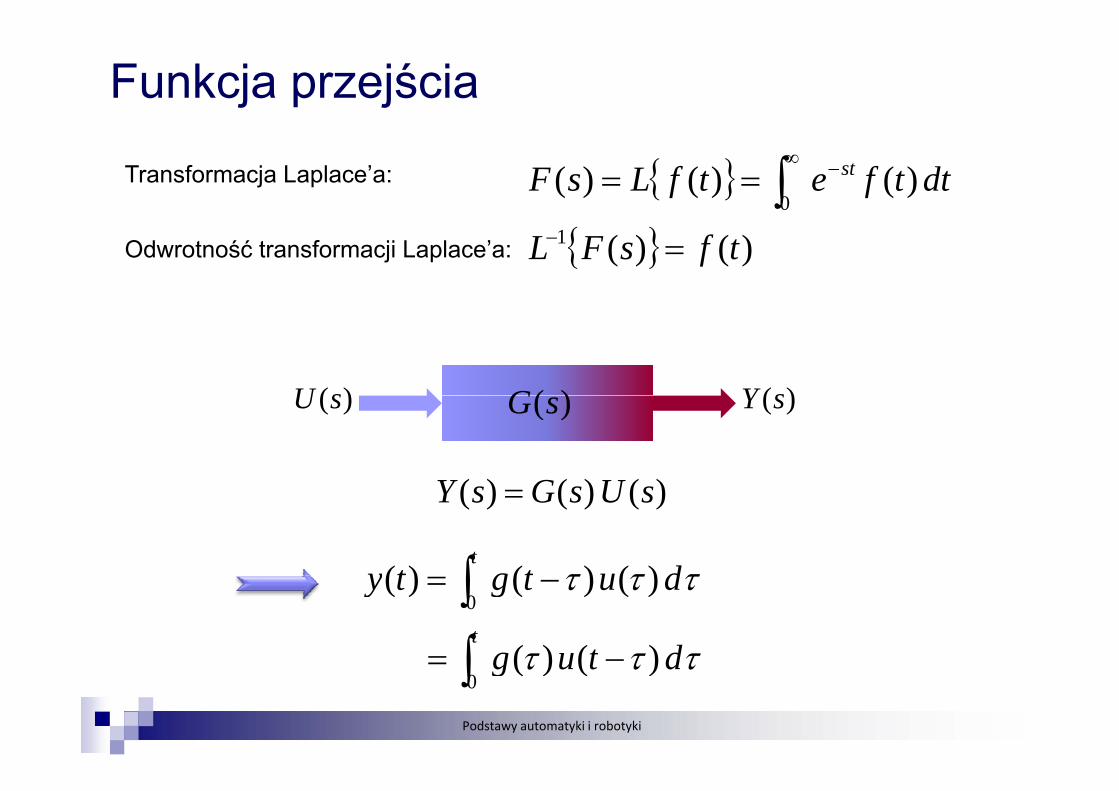
Funkcja przejścia
{ } )()()(0
dttfetfLsF st==∞ −∫Transformacja Laplace’a:
{ } )()(1 tfsFL =−Odwrotność transformacji Laplace’a:
)(G)(sU )(sY)(sG)(sU )(sY
)()()( UGY )()()( sUsGsY =
∫t
dutgty )()()( τττ
∫∫
−=
−=t
dtug
dutgty0
)()(
)()()(
τττ
τττ
Podstawy automatyki i robotyki
∫ dtug0
)()( τττ
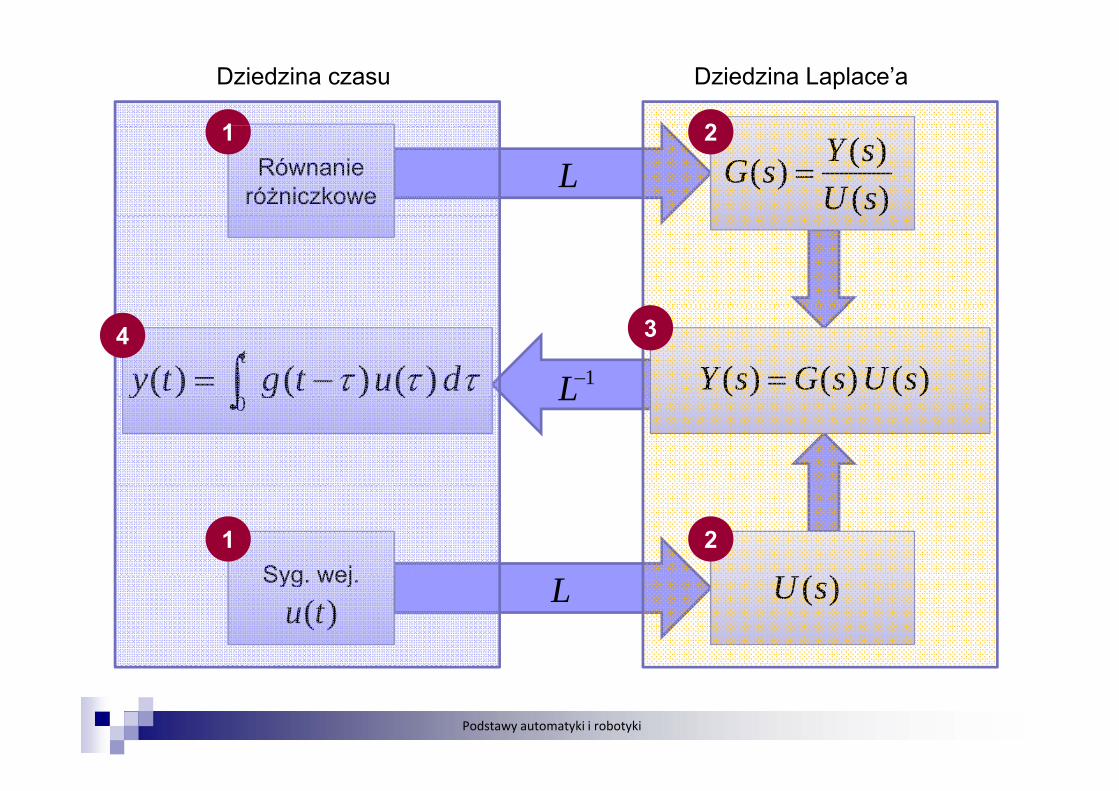
1 2
Dziedzina czasu Dziedzina Laplace’a
LRównanie różniczkowe )(
)()(sUsYsG =
1 2
)(
)()()( sUsGsY =∫ −=t
dutgty )()()( τττ 1−L
34
)()()(∫ gy0
)()()( L
)(Syg wej1 2
L )(sUSyg. wej.
)(tu
Podstawy automatyki i robotyki
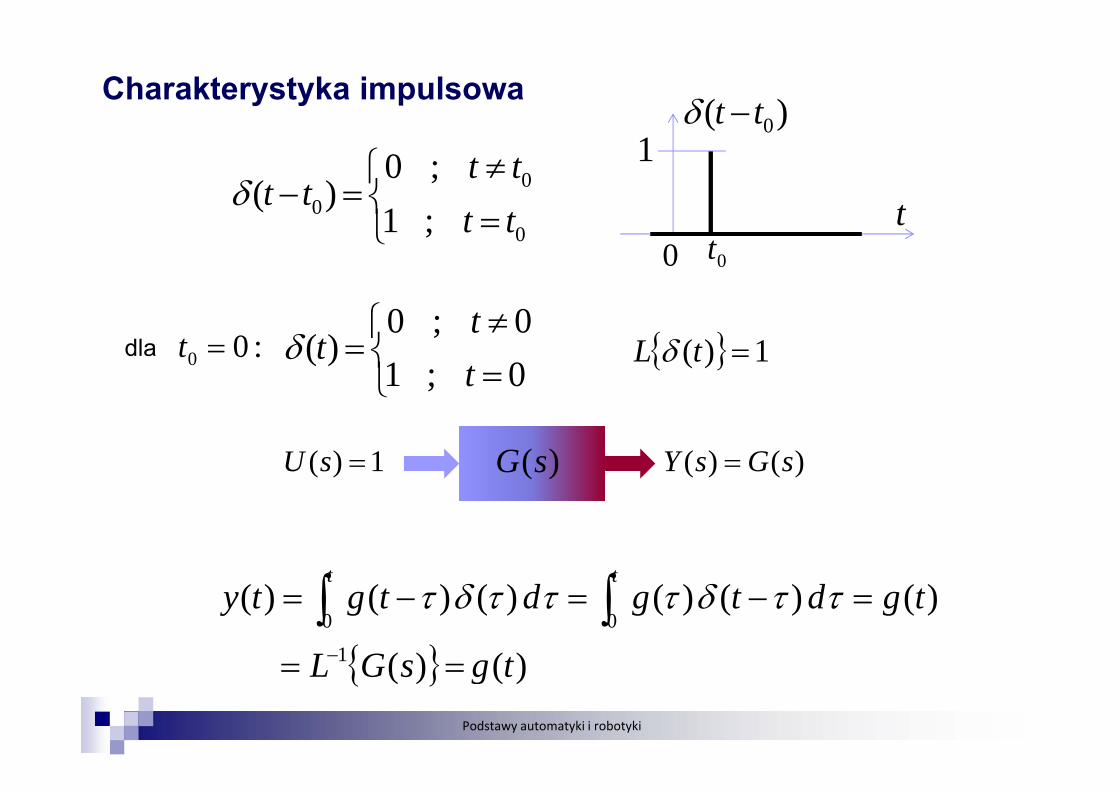
Charakterystyka impulsowa)( 0tt −δ
1)( 0
t⎩⎨⎧ ≠
=− 00 ;1
;0)(
tttt
ttδ t⎩ = 0;1 tt0t0
⎧dla :00 =t
⎩⎨⎧
=≠
=0;10;0
)(tt
tδ { } 1)( =tL δ⎩
)(sG1)( =sU )()( sGsY =
tt
∫∫{ } )()(
)()()()()()(1
00
tgsGL
tgdtgdtgtytt
==
=−=−=−
∫∫ ττδτττδτ
Podstawy automatyki i robotyki
{ } )()( tgsGL ==
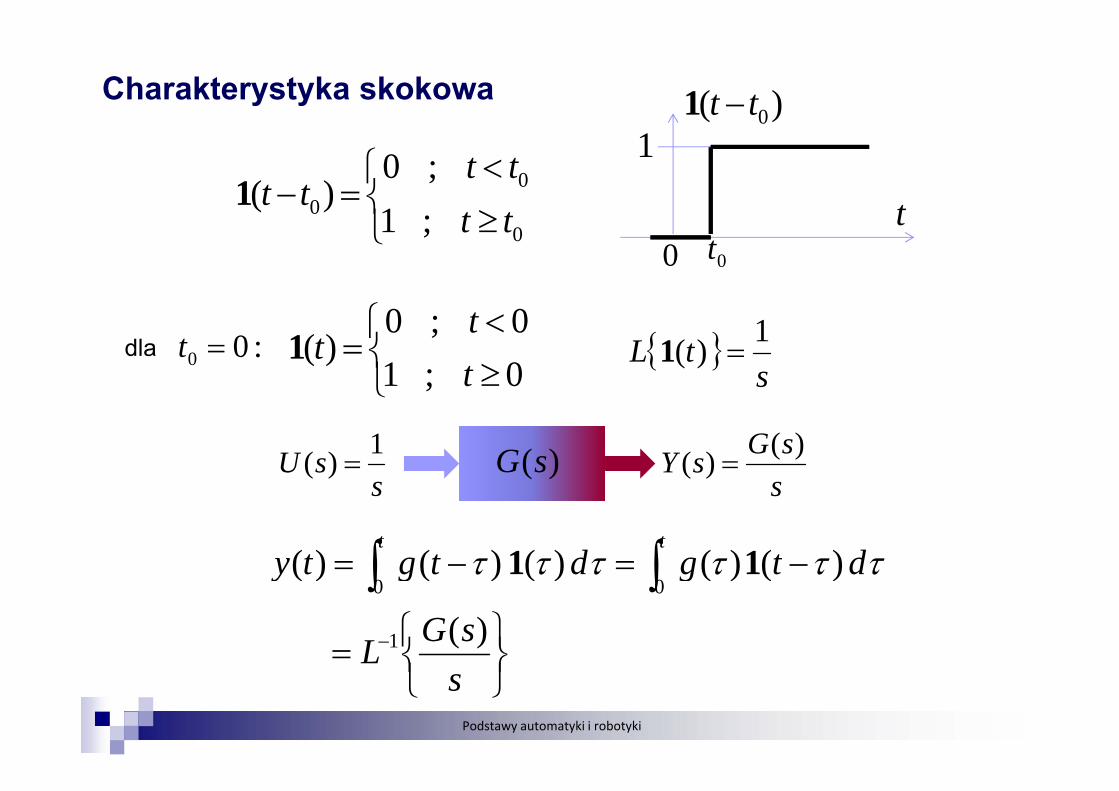
Charakterystyka skokowa )( 0tt −11
t⎩⎨⎧
≥<
=− 00 ;1
;0)(
tttt
tt1 t⎩ ≥ 0;1 tt0t0
⎧dla :00 =t
⎩⎨⎧
≥<
=0;10;0
)(tt
t1 { }s
tL 1)( =1⎩
)(sGs
sU 1)( =ssGsY )()( =
−=−= ∫∫ dtgdtgtytt
)()()()()( ττττττ 11
s s
⎭⎬⎫
⎩⎨⎧= −
∫∫sGL
ggy
)(
)()()()()(
1
00
Podstawy automatyki i robotyki
⎭⎬
⎩⎨ s
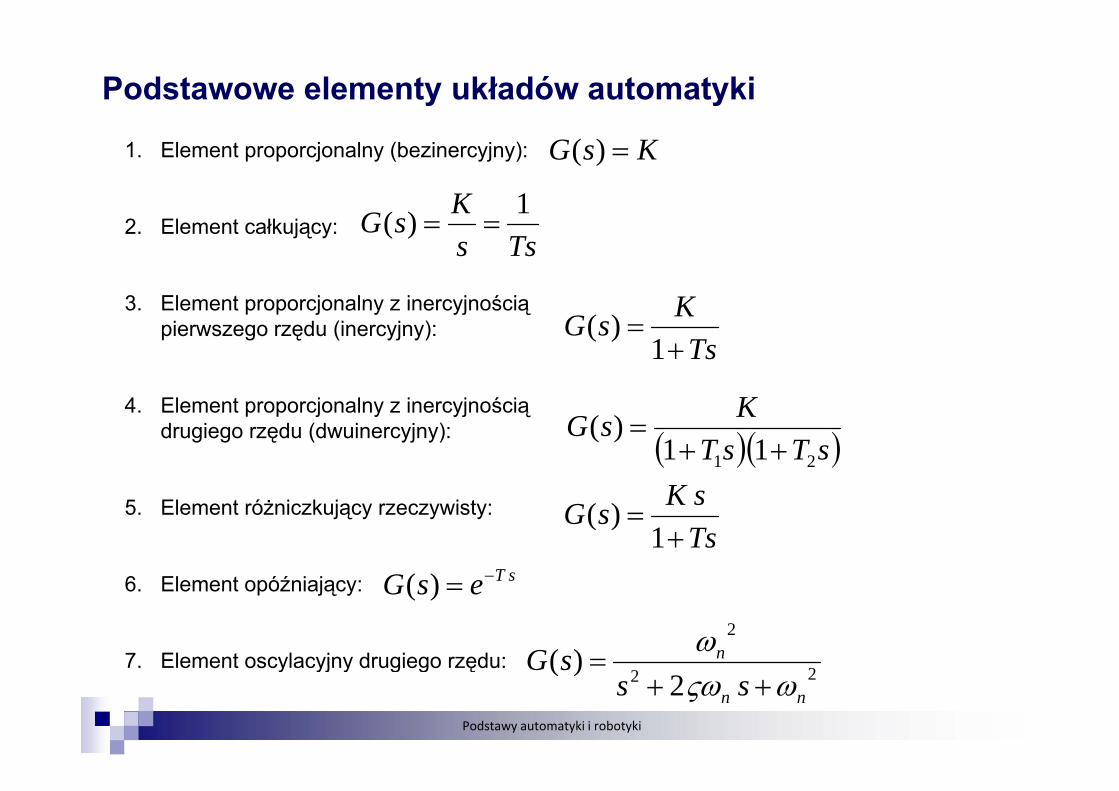
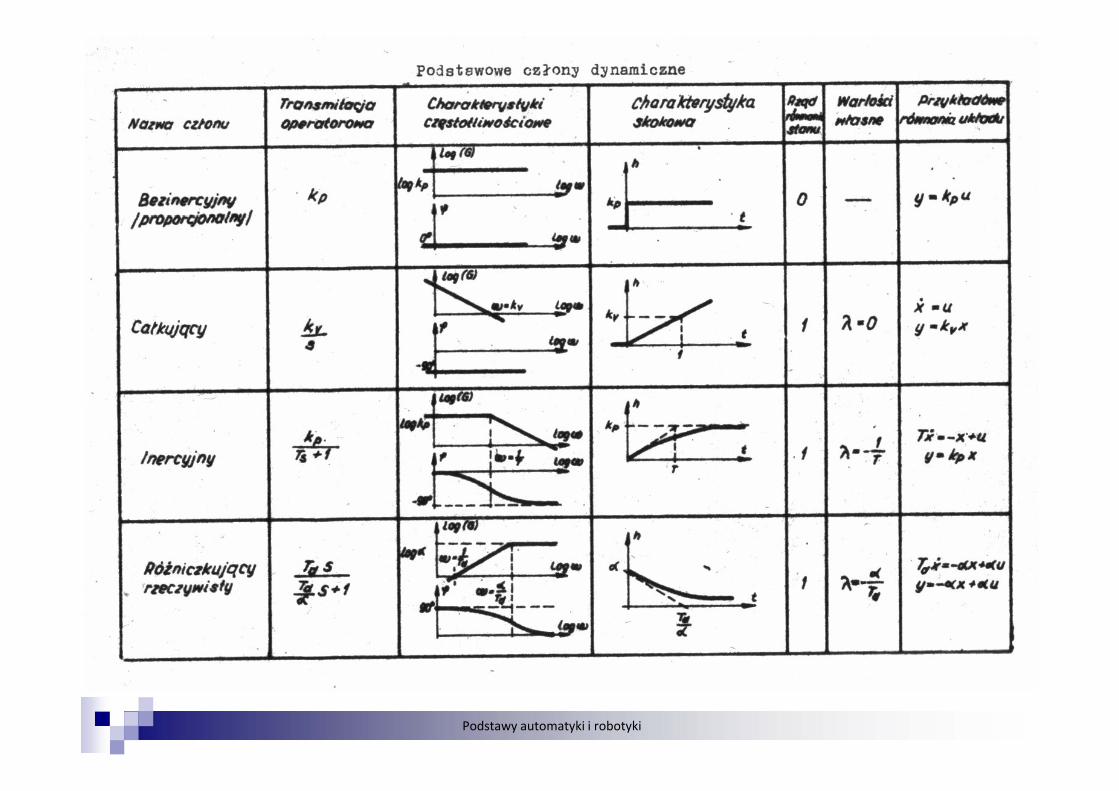
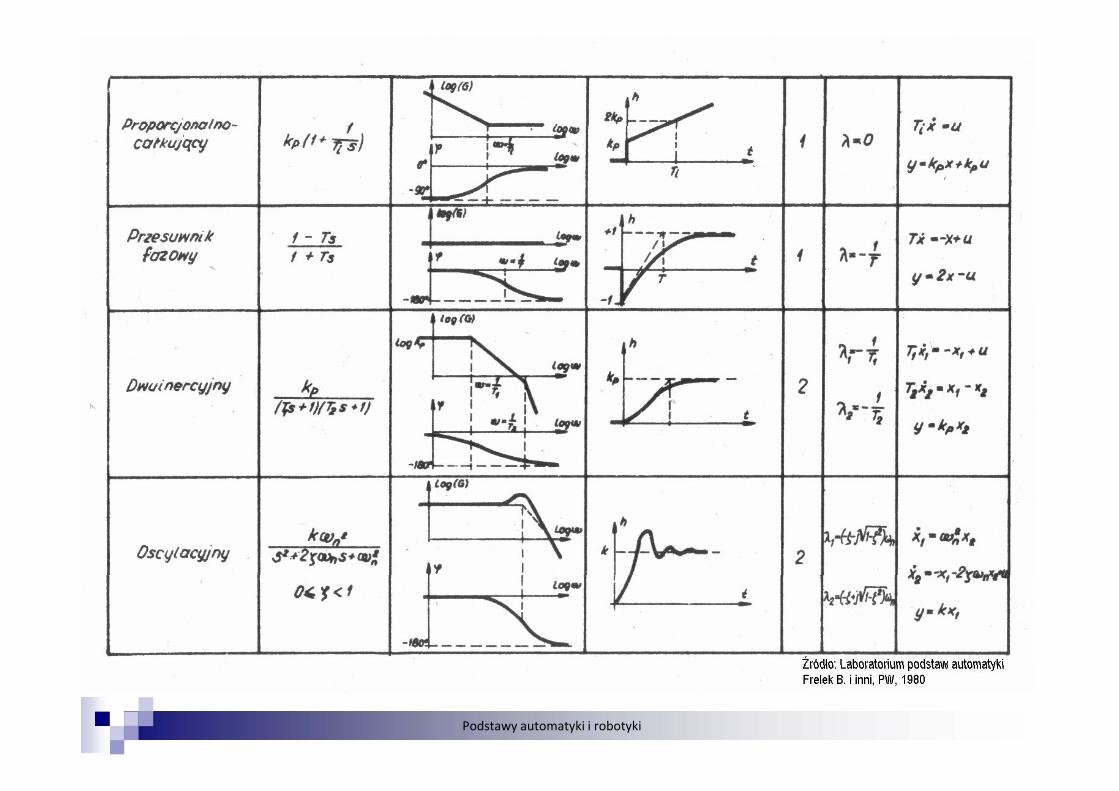
Podstawowe elementy układów automatyki
1. Element proporcjonalny (bezinercyjny): KsG =)(
KG 1)(2. Element całkujący:
3 Element proporcjonalny z inercyjnością
TsssG )( ==
K3. Element proporcjonalny z inercyjnościąpierwszego rzędu (inercyjny):
TsKsG+
=1
)(
4. Element proporcjonalny z inercyjnościądrugiego rzędu (dwuinercyjny): ( )( )sTsT
KsG21 11
)(++
=
K5. Element różniczkujący rzeczywisty:TssKsG
+=
1)(
sTG )(6. Element opóźniający:
7 Element oscylacyjny drugiego rzędu:2
)( nsG ω=
sTesG −=)(
Podstawy automatyki i robotyki
7. Element oscylacyjny drugiego rzędu:22 2
)(nn ss
sGωςω ++
=
Podstawy automatyki i robotyki
Podstawy automatyki i robotyki
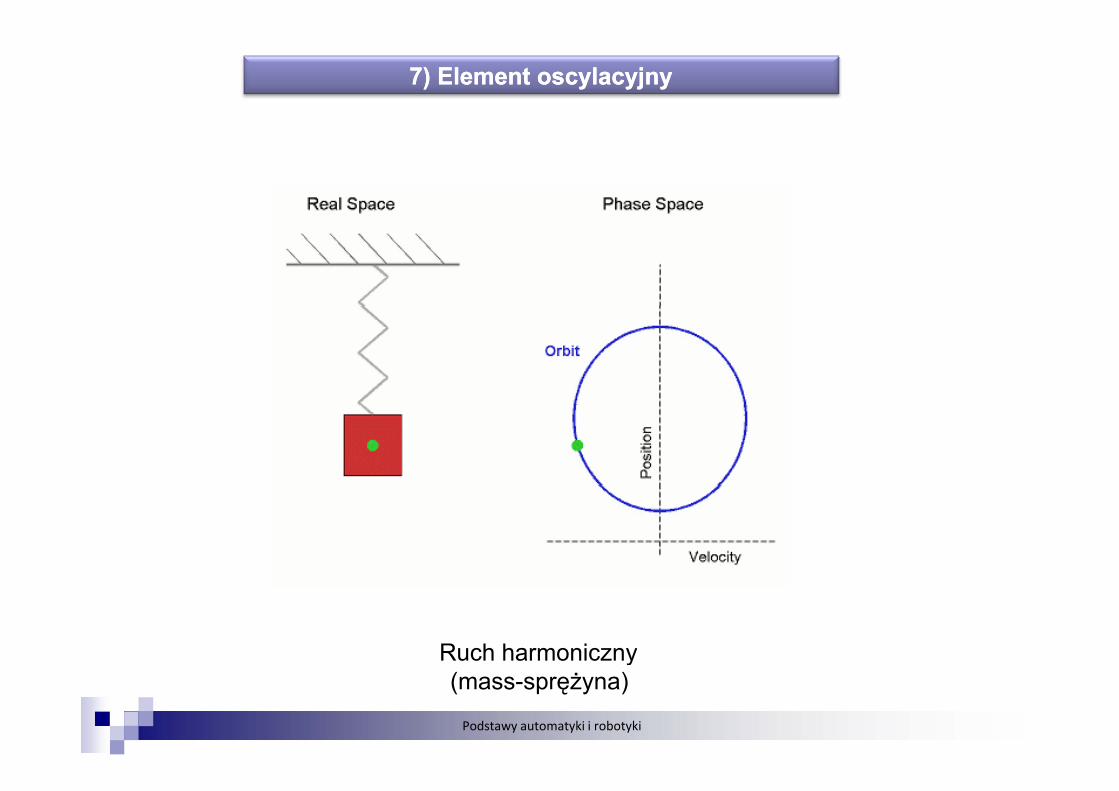
7) Element oscylacyjny7) Element oscylacyjny
Ruch harmoniczny
Podstawy automatyki i robotyki
y(mass-sprężyna)
Podstawy automatyki i robotyki
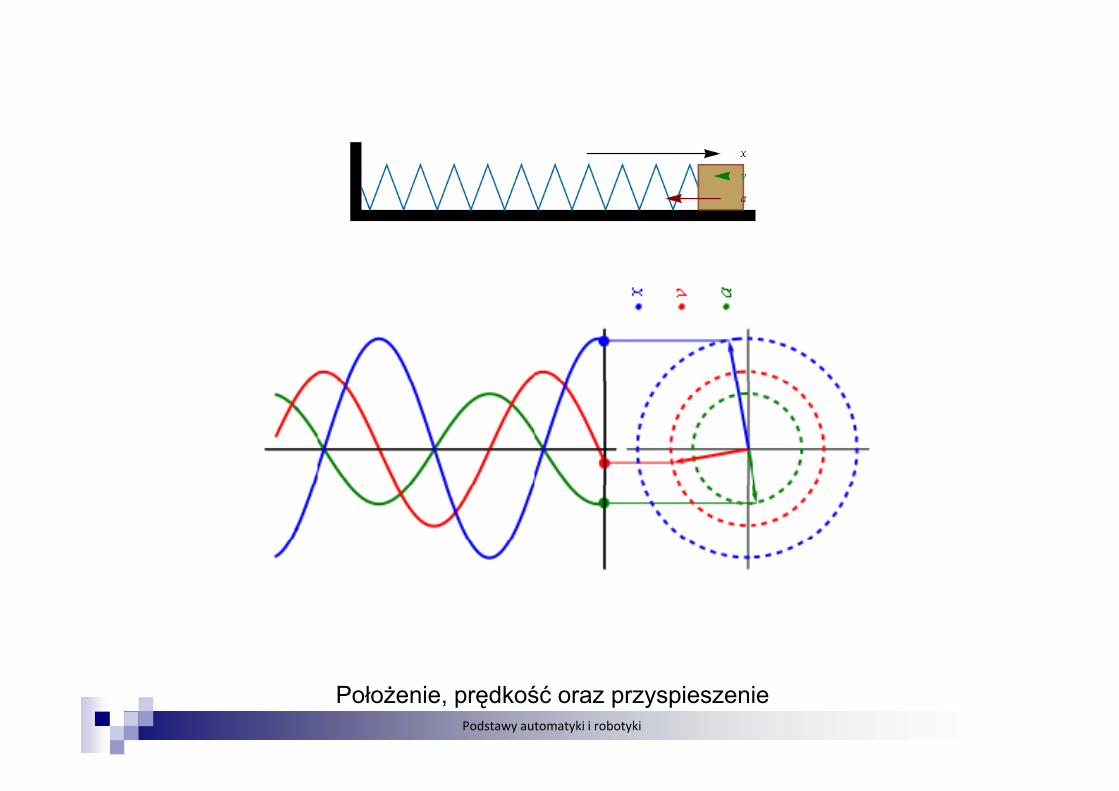
Położenie, prędkość oraz przyspieszenie
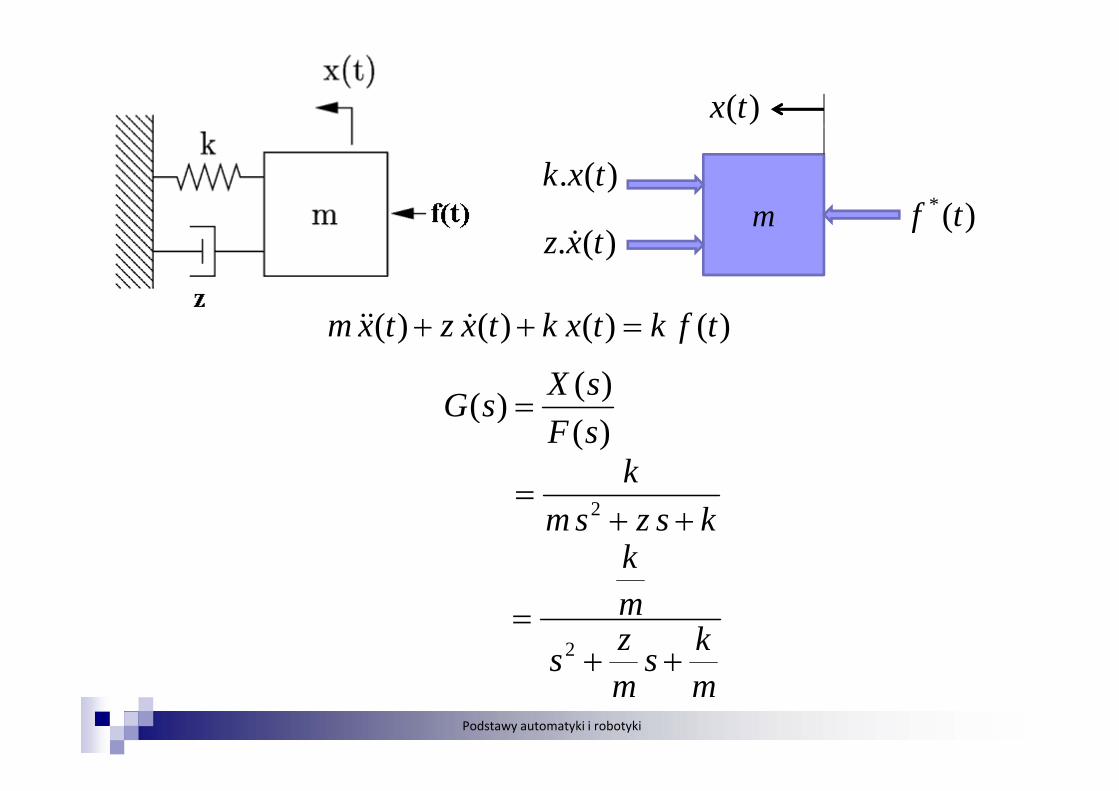
)(tx
m)(. txk
)(* tfm)(. txz &
)(tf
)()()()( tfktxktxztxm =++ &&&
)()( sXG)()()(
sFsG =
kkszsm ++
= 2
k
kszs
m
++=
2
Podstawy automatyki i robotyki
ms
ms ++
k
kkmk
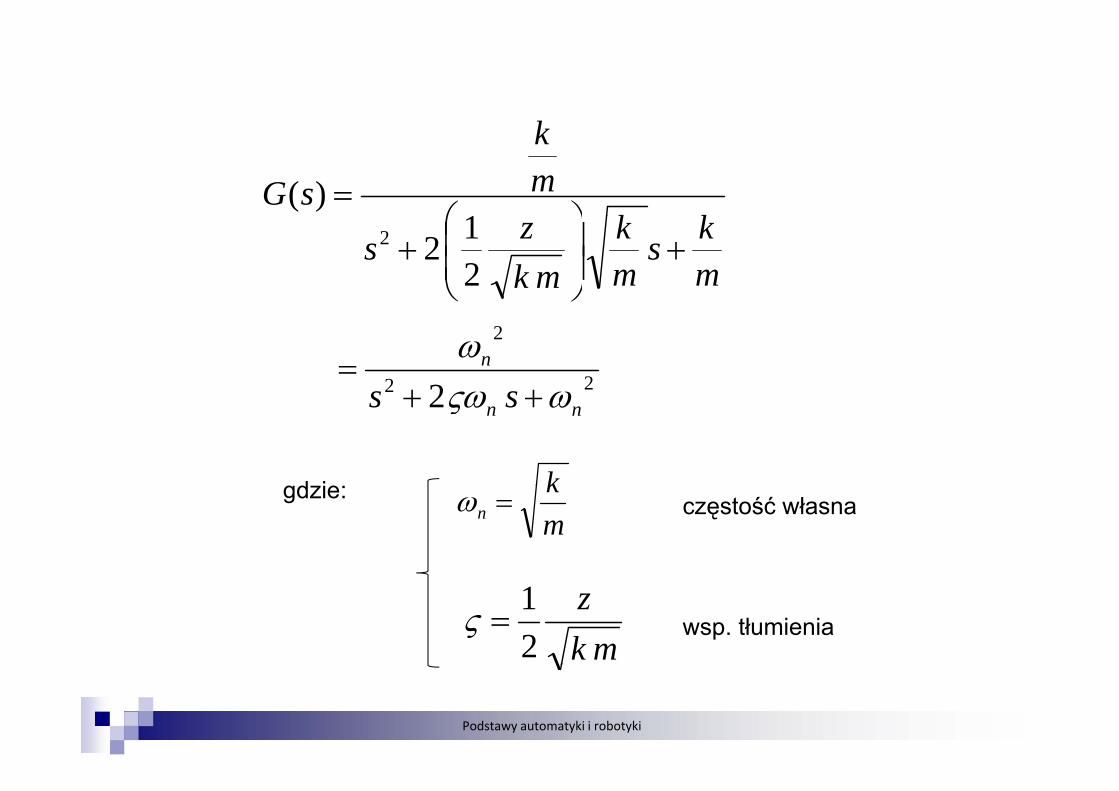
sG⎞⎛
=1
)(
mks
mk
mkzs +⎟
⎟⎠
⎞⎜⎜⎝
⎛+
2122
22
2
2n
ss ωςωω
++=
2 nn ss ωςω ++
kd imk
n =ω częstość własnagdzie:
mkz
21
=ς wsp. tłumienia
Podstawy automatyki i robotyki
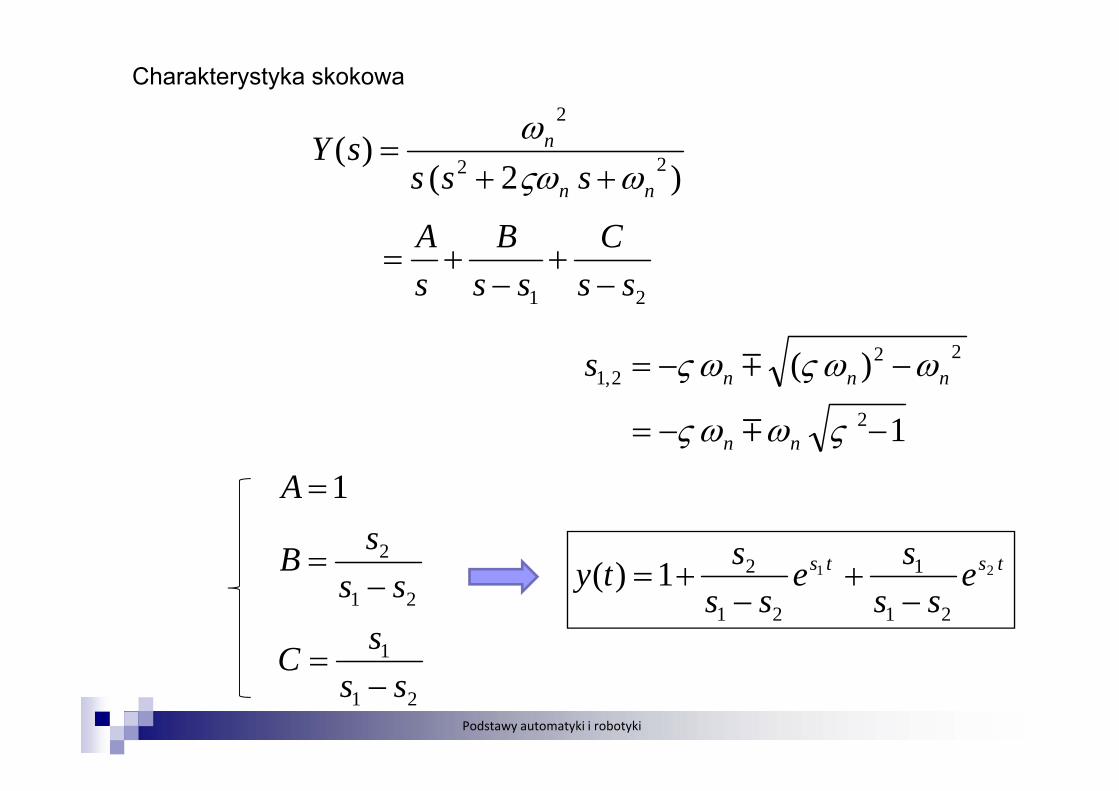
Charakterystyka skokowa2ω
)2()( 22
nn
n
ssssY
ωςωω
++=
21 ssC
ssB
sA
−+
−+=
222,1 )( nnns ωωςως −−= m
12−−= ςωως nn m
1A =
2
1sB
A
=
=
tsts esesty 21 121)( ++=
1
21
sC
ss
=
− ess
ess
ty2121
1)(−
+−
+=
Podstawy automatyki i robotyki
21 ssC
−=
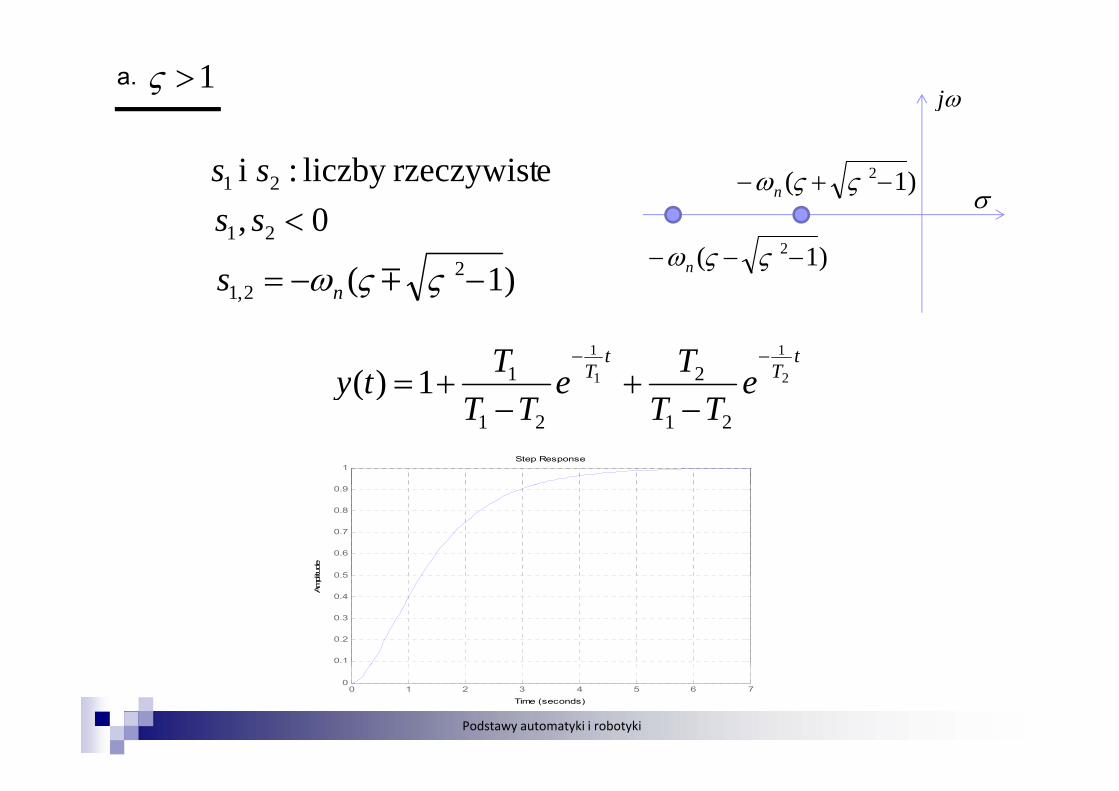
a. 1>ςωj
erzeczywistliczby:i 21 ss0<ss
)1( 2−+− ςςωn σ0, 21 <ss
)1( 2−−− ςςωn)1( 22,1 −−= ςςω mns
tT
tT eTeTty 2
1
1
1
211)(−−
++=
1Step Response
TTTTy
2121
)(−−
0 5
0.6
0.7
0.8
0.9
tude
0.1
0.2
0.3
0.4
0.5
Amplit
Podstawy automatyki i robotyki
0 1 2 3 4 5 6 70
Time (seconds)
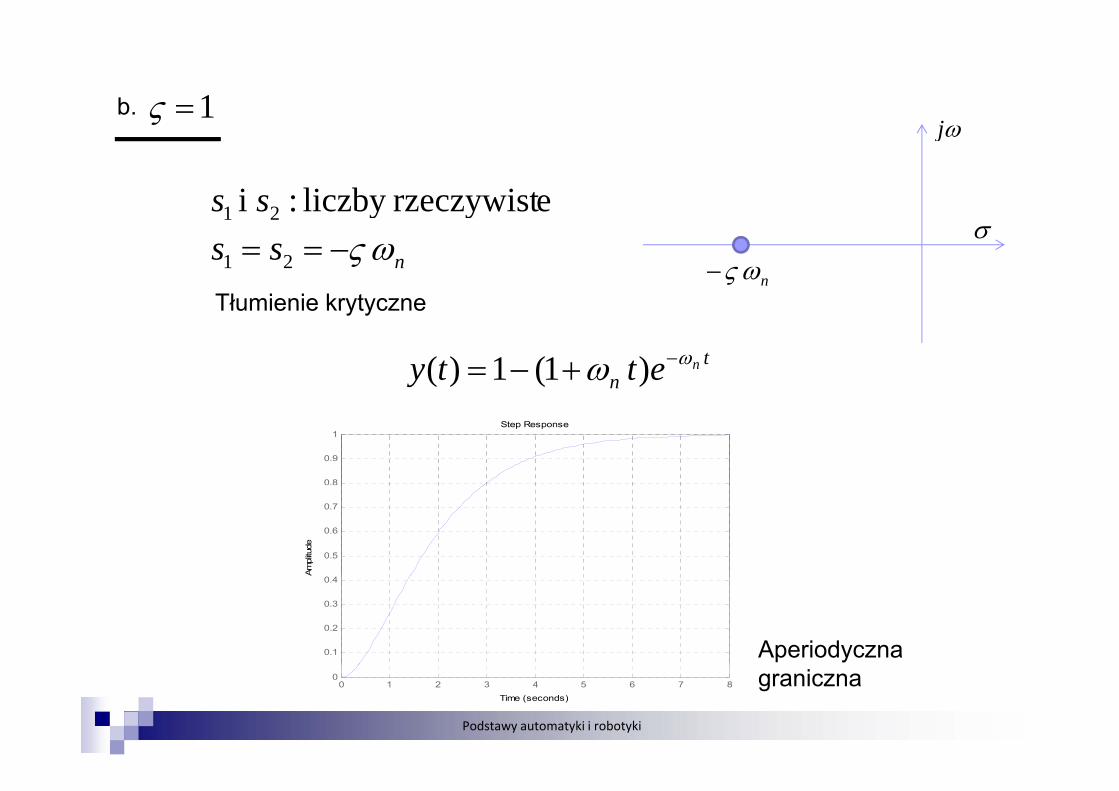
b. 1=ςωj
erzeczywistliczby:i 21 ss
ωj
yy21
nss ως−== 21nως−
σ
Tłumienie krytyczne
tn
netty ωω −+−= )1(1)(
Tłumienie krytyczne
0.8
0.9
1Step Response
0.5
0.6
0.7
Ampl
itude
0.1
0.2
0.3
0.4
A
Aperiodyczna
Podstawy automatyki i robotyki
0 1 2 3 4 5 6 7 80
Time (seconds)
graniczna
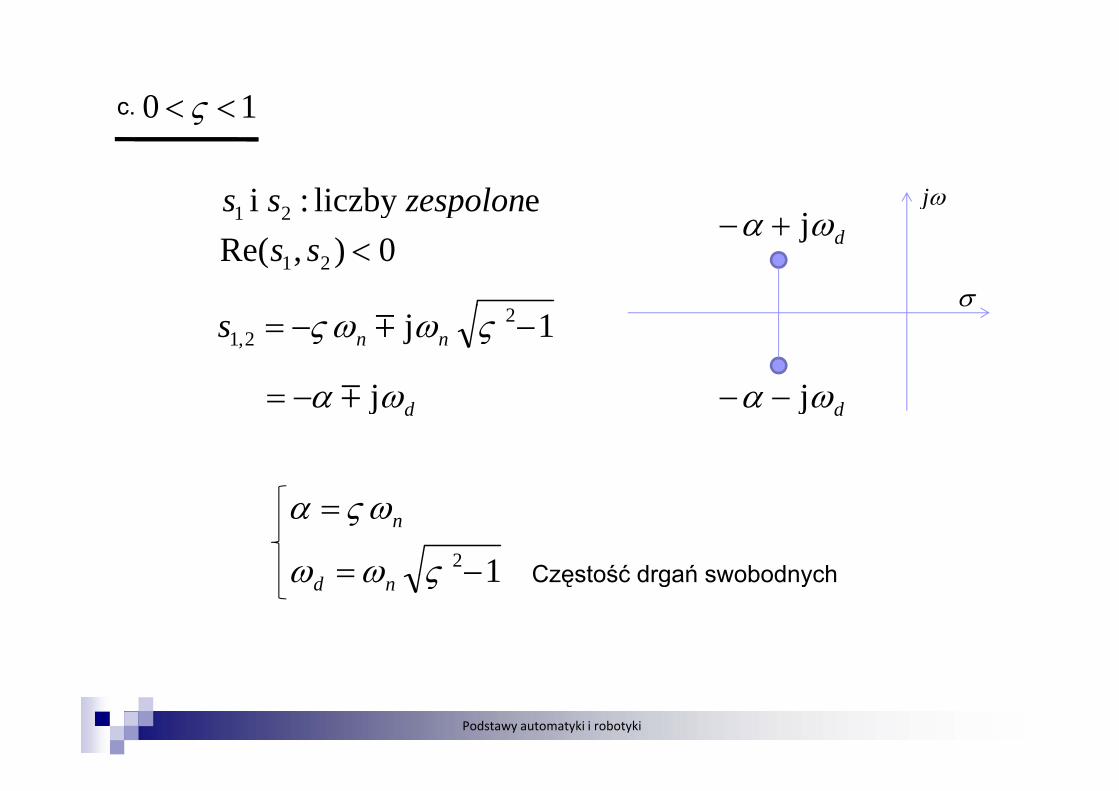
c. 10 << ς
eliczby:i 21 zespolonss ωjj
y21 p0),Re( 21 <ss
σ
dωα j+−
1j 22,1 −−= ςωως nns m
ωα jm=
σ
ωα jdωα jm−= dωα j−−
12−=
=
ςωω
ωςα n
Częstość drgań swobodnych1= ςωω nd Częstość drgań swobodnych
Podstawy automatyki i robotyki
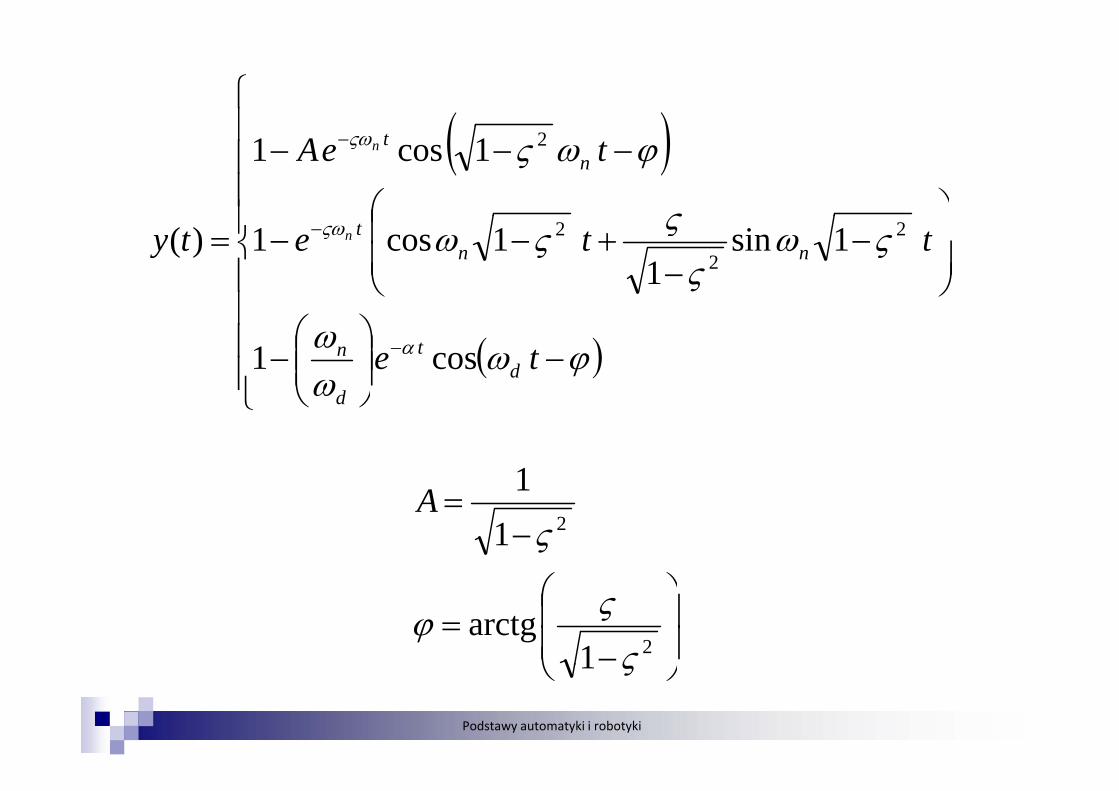
( )⎪⎧
( )⎪⎪⎪⎪
⎟⎞
⎜⎛
−−− −
ς
ϕωςςω teA ntn 1cos1 2
⎪⎪
⎪⎨ ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛−
−+−−= − ςω
ςςςωςω ttety nn
tn 1sin1
1cos1)( 2
2
2
( )⎪⎪⎪
⎩−⎟⎟
⎠
⎞⎜⎜⎝
⎛− − ϕω
ωω α te d
t
d
n cos1⎩ ⎠⎝ωd
1
⎞⎛
−=
211ς
A
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−=
21arctg
ςςϕ
Podstawy automatyki i robotyki
⎠⎝ 1 ς
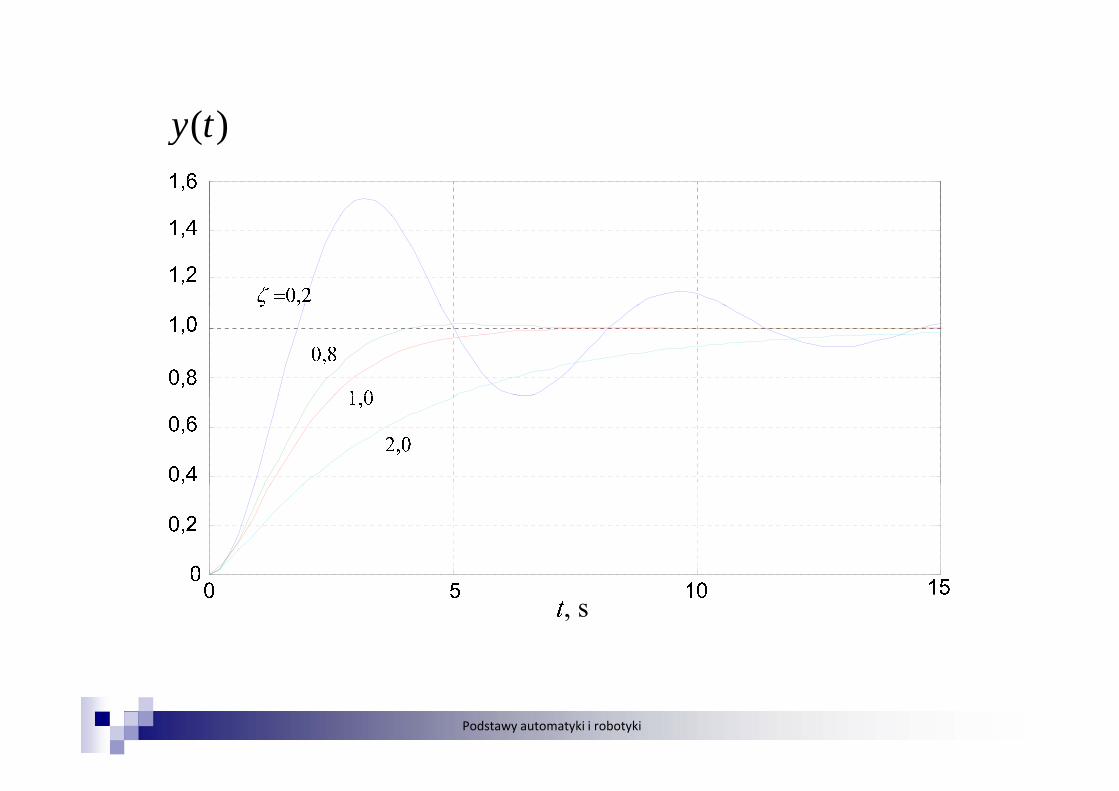
)(ty1.6
)(ty
1.2
1.4
0.8
1
0.4
0.6
0
0.2
0 5 10 150
(sec)
Podstawy automatyki i robotyki
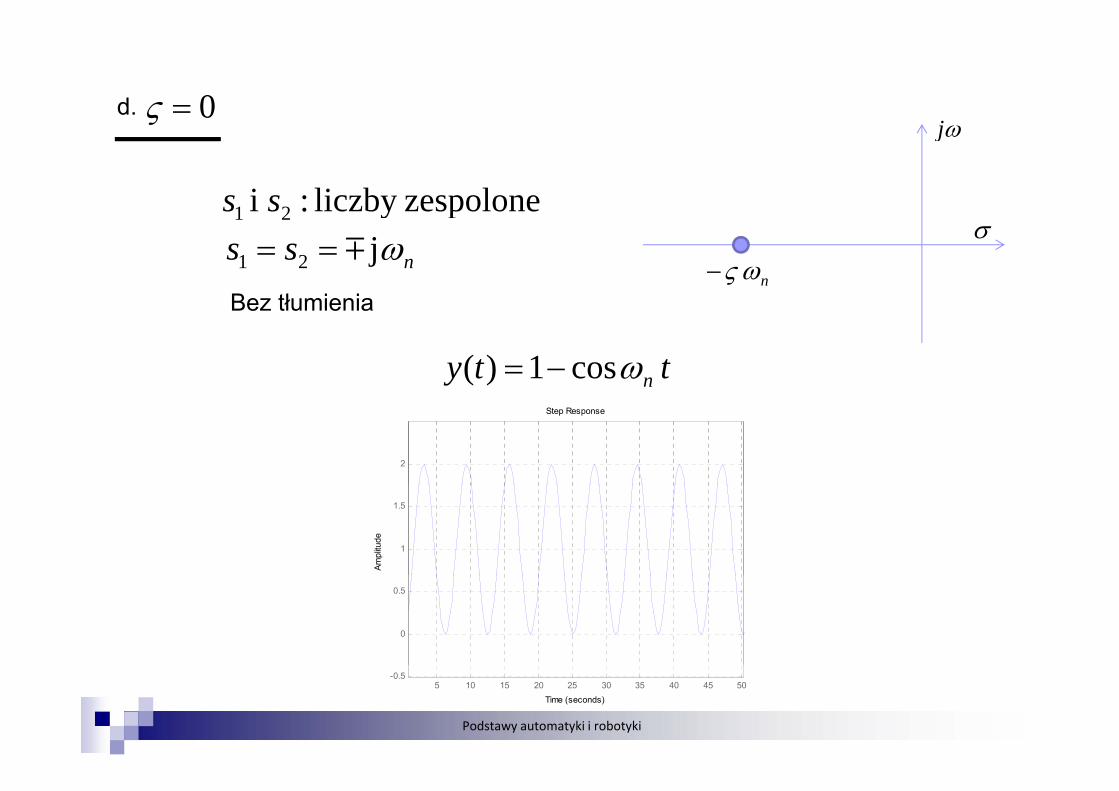
d. 0=ςωj
zespoloneliczby:i 21 ss
ωj
py21
nss ωj21 m==nως−
σ
Bez tłumienia
tty nωcos1)( −=
Bez tłumienia
2
Step Response
1
1.5
Ampl
itude
0
0.5
Podstawy automatyki i robotyki
5 10 15 20 25 30 35 40 45 50-0.5
Time (seconds)
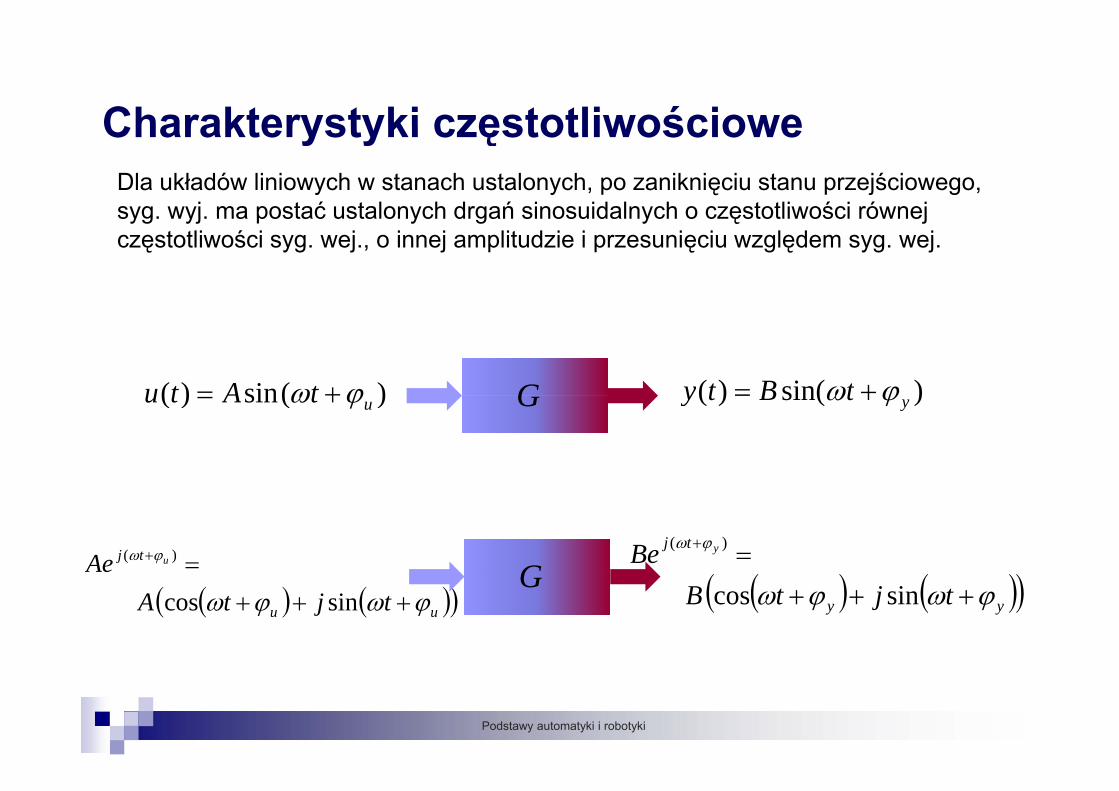
Charakterystyki częstotliwościoweCharakterystyki częstotliwościoweDla układów liniowych w stanach ustalonych, po zaniknięciu stanu przejściowego, syg wyj ma postać ustalonych drgań sinosuidalnych o częstotliwości równejsyg. wyj. ma postać ustalonych drgań sinosuidalnych o częstotliwości równej częstotliwości syg. wej., o innej amplitudzie i przesunięciu względem syg. wej.
G)(sin)( tAtu ϕω += )sin()( tBty ϕω +=G)(sin)( utAtu ϕω += )sin()( ytBty ϕω +=
tjAe uϕω =+ )(
( ) ( )( )tjBe yϕω =+ )(
G( ) ( )( )uu tjtA ϕωϕω +++ sincos ( ) ( )( )yy tjtB ϕωϕω +++ sincosG
Podstawy automatyki i robotyki
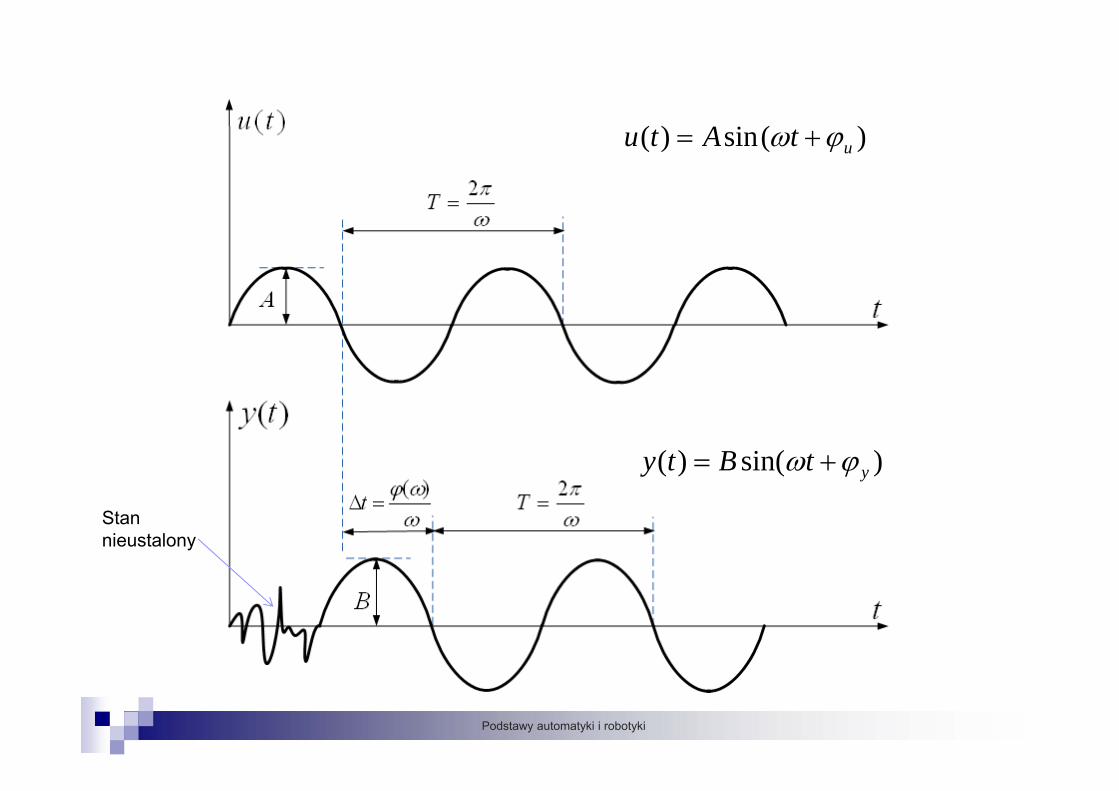
)(i)( A )(sin)( utAtu ϕω +=
)sin()( ytBty ϕω +=
Stan nieustalony
Podstawy automatyki i robotyki
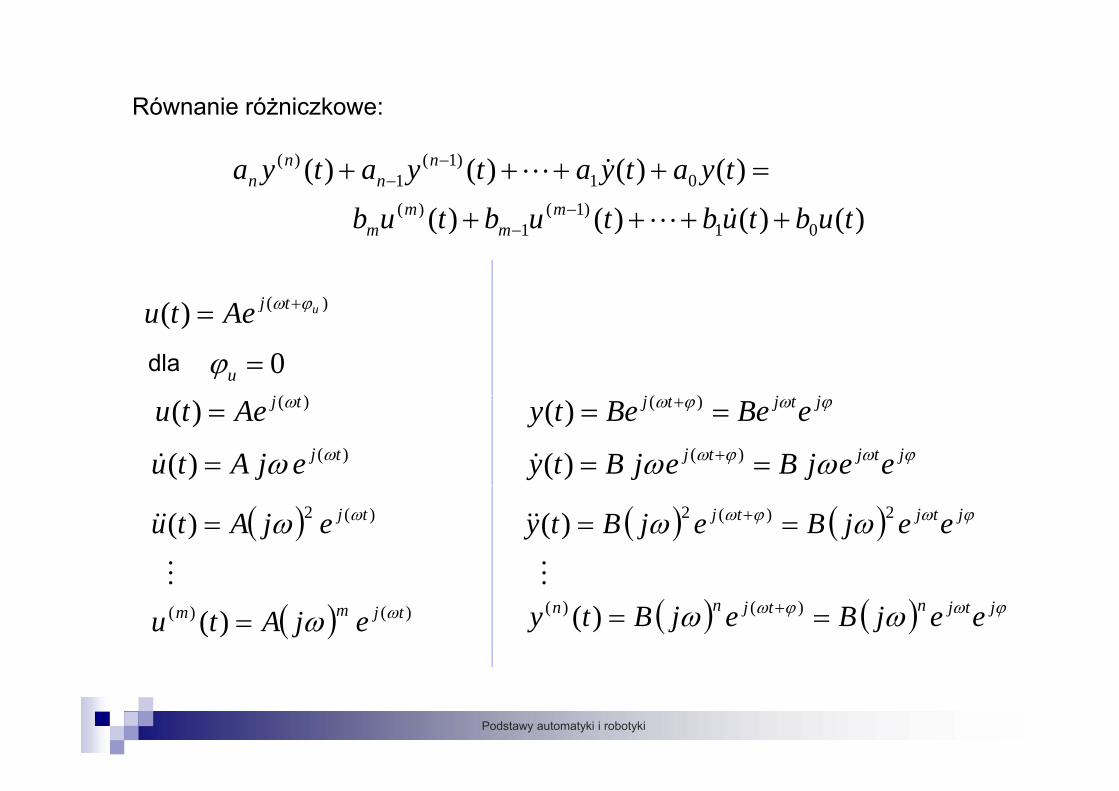
Równanie różniczkowe:
)()()()(
)()()()()1()(
01)1(
1)(
tubtubtubtub
tyatyatyatyamm
nn
nn
++++
=++++−
−−
&
&L
)()()()( 01)(
1)( tubtubtubtub mm ++++ − L
)()( tjAt ϕω + )()( utjAetu ϕω +=
0=uϕdla)()( ϕωϕω jtjtj eBeBety == + )()(
ϕωϕω ωω jtjtj eejBejBty == + )()(&
)()( tjAetu ω=)()( tjejAtu ωω=&
M
( ) ( ) ϕωϕω ωω jtjtj eejBejBty 2)(2)( == +&&( ) )(2)( tjejAtu ωω=&&
M M
( ) )()( )( tjmm ejAtu ωω=
M
( ) ( ) ϕωϕω ωω jtjntjnn eejBejBty == + )()( )(
Podstawy automatyki i robotyki
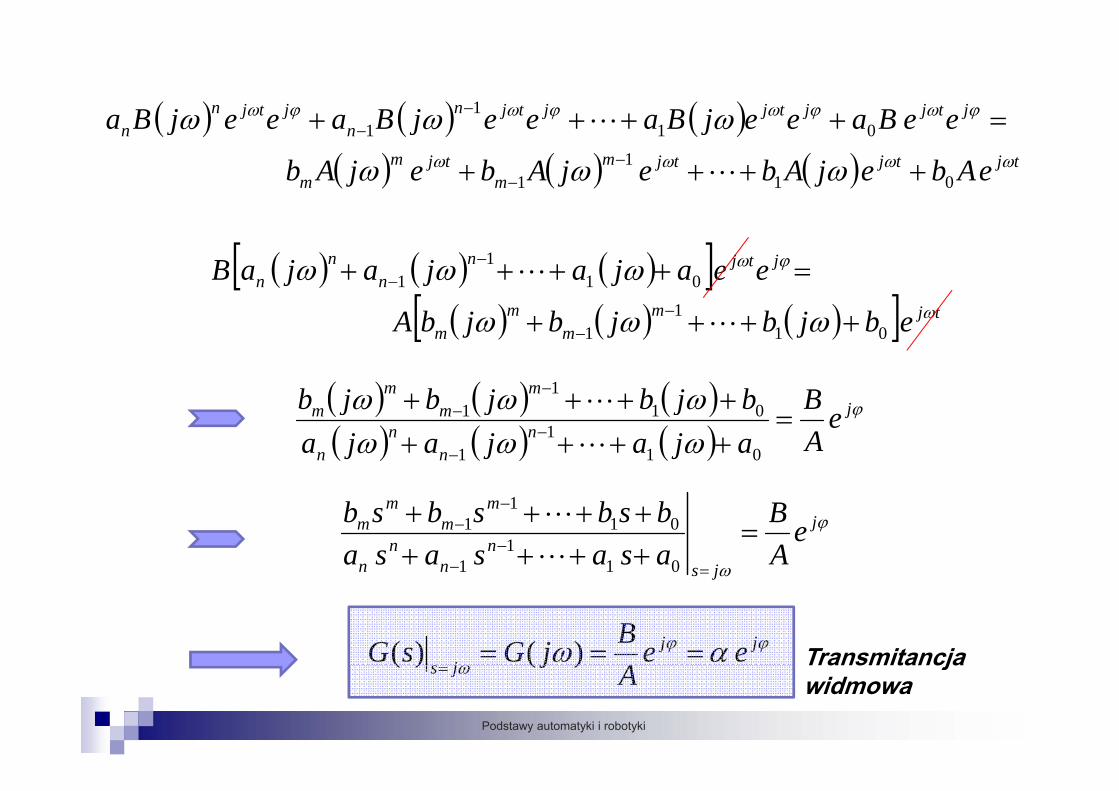
( ) ( ) ( ) jtjjtjjtjnjtjn eeBaeejBaeejBaeejBa ϕωϕωϕωϕω ωωω 011
1 =++++ −L( ) ( ) ( )
( ) ( ) ( ) tjtjtjmm
tjmm
nn
eAbejAbejAbejAb
eeBaeejBaeejBaeejBaωωωω ωωω
ωωω
011
1
011
++++
++++−
−
−
L
( ) ( ) ( )[ ]( ) ( ) ( )[ ]
jtjnn
nn eeajajajaB ϕωωωω
101
11 =++++ −− L
( ) ( ) ( )[ ] tjmm
mm ebjbjbjbA ωωωω 01
11 ++++ −− L
( ) ( ) ( )ωωω mm Bbjbjbjb ++++ −1( ) ( ) ( )( ) ( ) ( )
ϕ
ωωωωωω j
nn
nn
mm eAB
ajajajabjbjbjb
=++++++++
−−
−
011
1
011
L
L
ϕ
ω
j
jsn
nn
n
mm
mm e
AB
asasasabsbsbsb
=++++++++
=−
−
−−
011
1
011
1
L
L
ωjs
ϕϕ αω jjj
eeABjGsG === )()( Transmitancja
Podstawy automatyki i robotyki
ωjs Aj
=)()( Transmitancja
widmowa
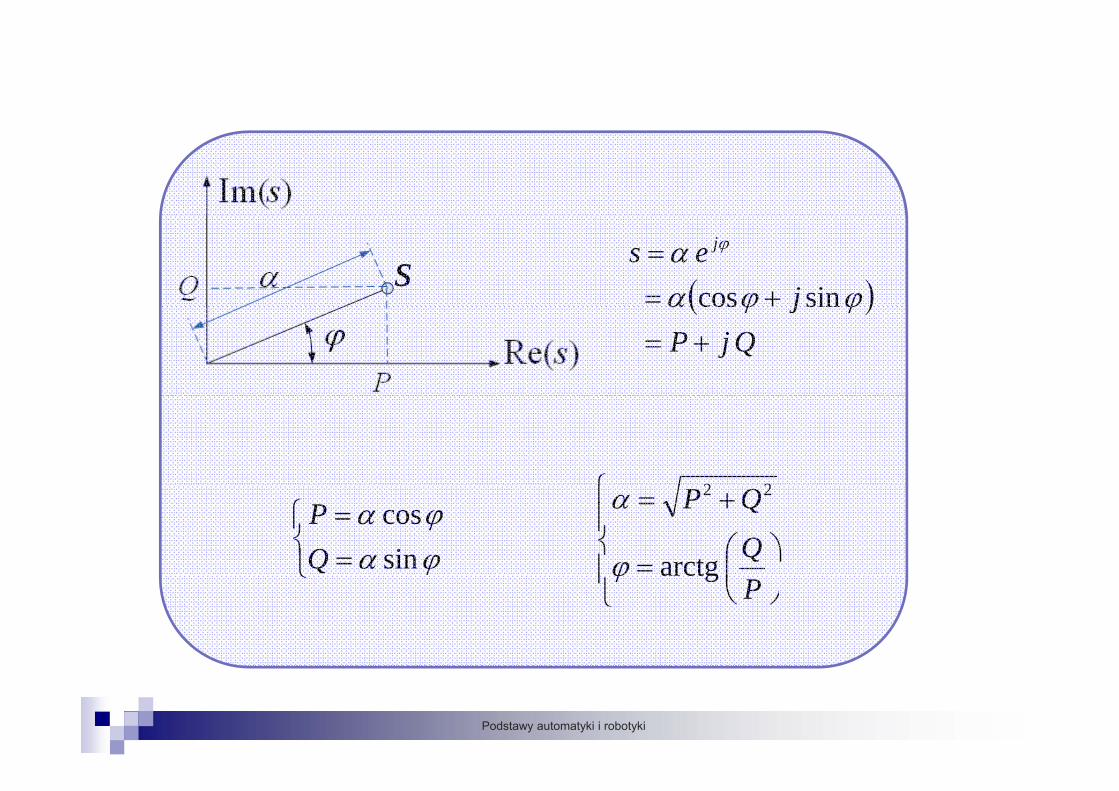
( )jes j
+==
ϕϕαα ϕ
sincoss ( )
QjPj
+=+ ϕϕα sincos
⎧ 22
⎩⎨⎧
==
ϕαϕα
sincos
QP
⎪
⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛=
+=
Q
QP
arctg
22
ϕ
α
⎩ ⎪⎩
⎟⎠
⎜⎝ P
arctgϕ
Podstawy automatyki i robotyki
Charakterystyki częstotliwościowe – c dCharakterystyki częstotliwościowe – c.d.
Amplitudowo-fazowe charakterystyki Nyquist’aAmplitudowo-fazowe charakterystyki Nyquist aAmplitudowe i fazowe charakterystyki Nichols’aLogarytmiczne charakterystyki amplitudowei fazowe Bode’goWyznaczenie transmitancji widmowej dla połączenia szeregowegoWyznaczenie transmitancji widmowej dla połączenia równoległegop ą g gIdentyfikacja na podstawie charakterystyk częstotliwościowych
Podstawy automatyki i robotyki
częstotliwościowych
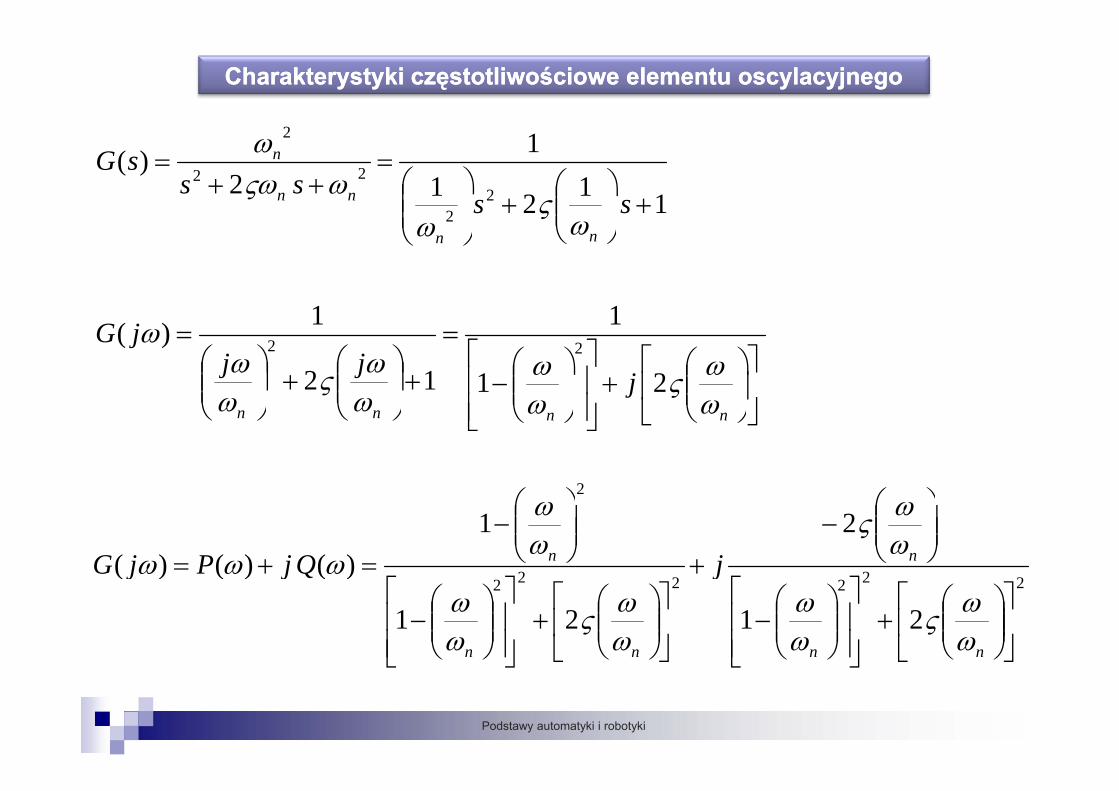
Charakterystyki częstotliwościowe elementu oscylacyjnegoCharakterystyki częstotliwościowe elementu oscylacyjnego
11211
2)(
22
22
2
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎞⎜⎜⎛
=++
=
ssss
sGnn
n
ςωςω
ω
2 ⎟⎠
⎜⎝⎟
⎠⎜⎝ nn ω
ςω
11
⎥⎤
⎢⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎤
⎢⎢⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
jjj
jGωςωωςω
ω
21
1
12
1)(22
⎥⎦
⎢⎣
⎟⎠
⎜⎝⎥⎦⎢⎣
⎟⎠
⎜⎝
⎟⎠
⎜⎝
⎟⎠
⎜⎝ nnnn
jω
ςωωω
2
22
2
21)()()(
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
=+= nn jQjPjGωως
ωω
ωωω222222
2121
)()()(
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
nnnn
jQjj
ωως
ωω
ωως
ωω
Podstawy automatyki i robotyki
⎦⎣⎦⎣
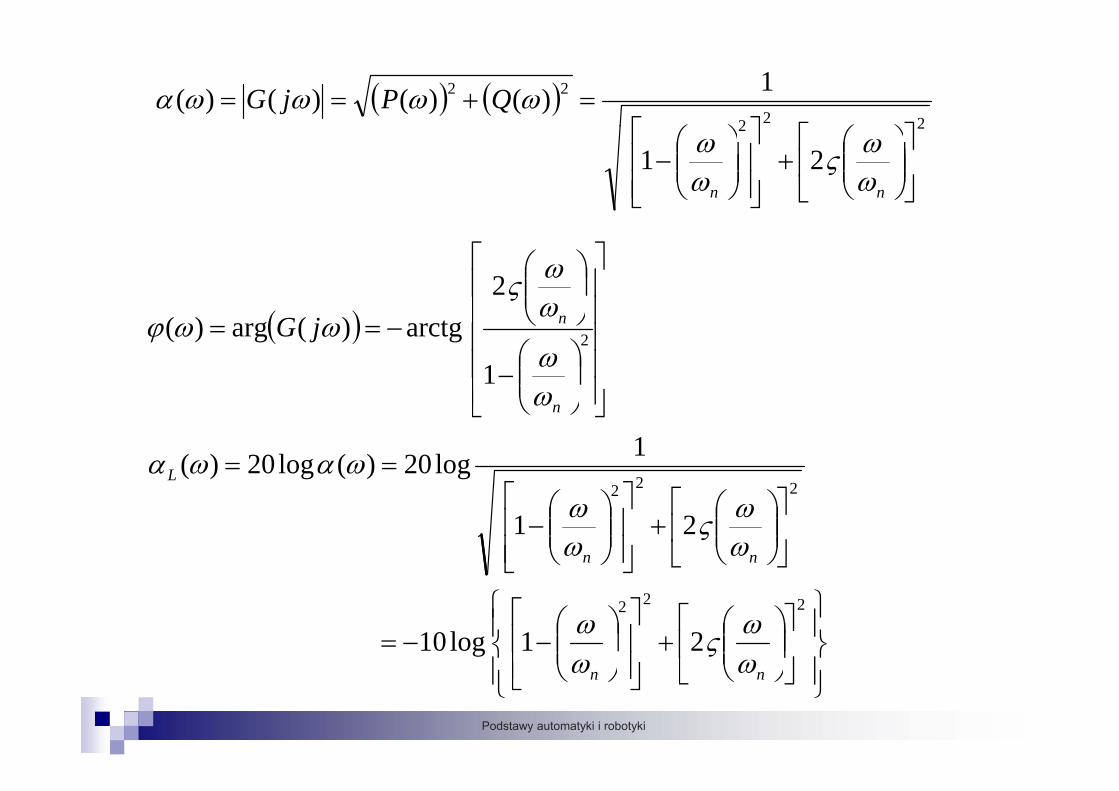
( ) ( )222
22 1)()()()(⎤⎡ ⎞⎛⎤⎡ ⎞⎛
=+== QPjG ωωωωα22
21 ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
nn ωως
ωω
⎥⎥⎤
⎢⎢⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛2
ωως
( )
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎠
⎜⎝−== 2
1
arctg)(arg)( njG
ωω
ωωωϕ
⎥⎦⎢⎣⎟⎠
⎜⎝ nω
⎤⎡==
222
1log20)(log20)(L ωαωα
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
222
21nn ωως
ωω
⎪
⎪⎬⎫
⎪
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
222
21log10ωως
ωω
Podstawy automatyki i robotyki
⎪⎭⎪⎩ ⎦⎣ ⎠⎝⎥⎦⎢⎣ ⎠⎝ nn ωω
25
Axis
15
20
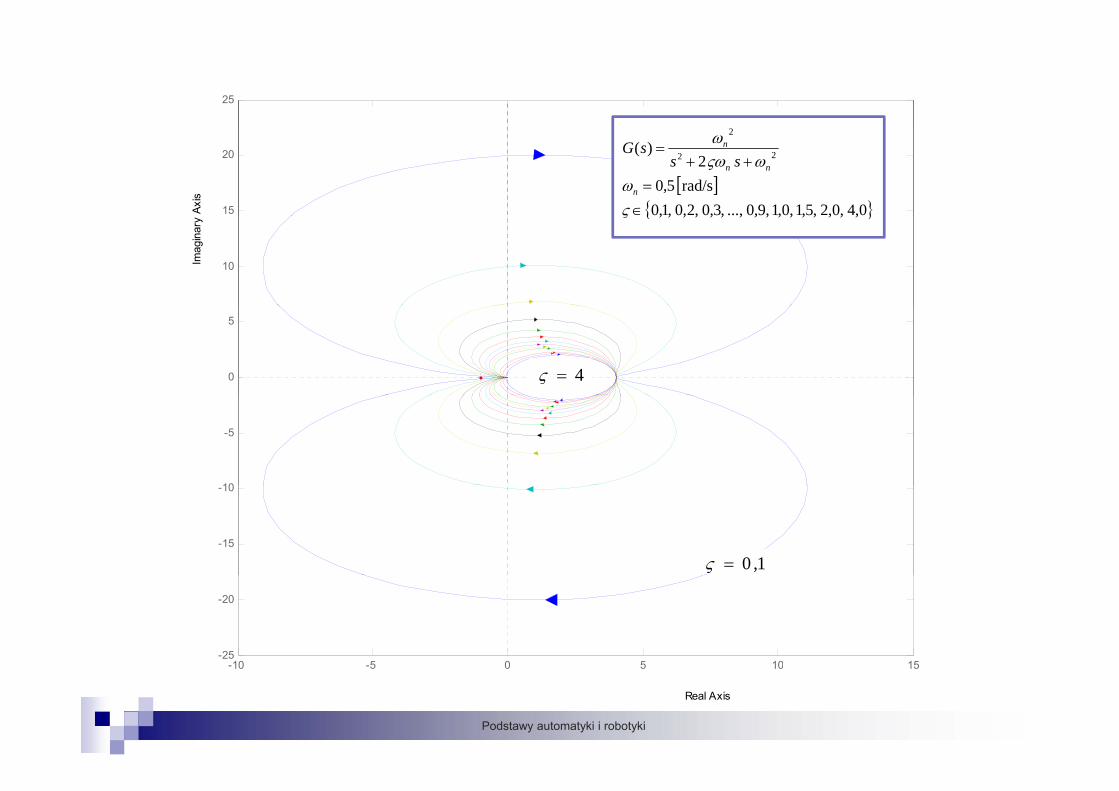
[ ]{ }0,4,0,2,5,1,0,1,9,0...,,3,0,2,0,1,0
rad/s5,02
)( 22
2
∈=
++=
ςω
ωςωω
n
nn
n
sssG
Imag
inar
y
10
{ },,,,,,,,,,,,,,,,ς
0
5
4=ς
10
-5
-15
-10
1,0=ς
10 5 0 5 10 15-25
-20
Podstawy automatyki i robotyki
Real Axis
-10 -5 0 5 10 15
20
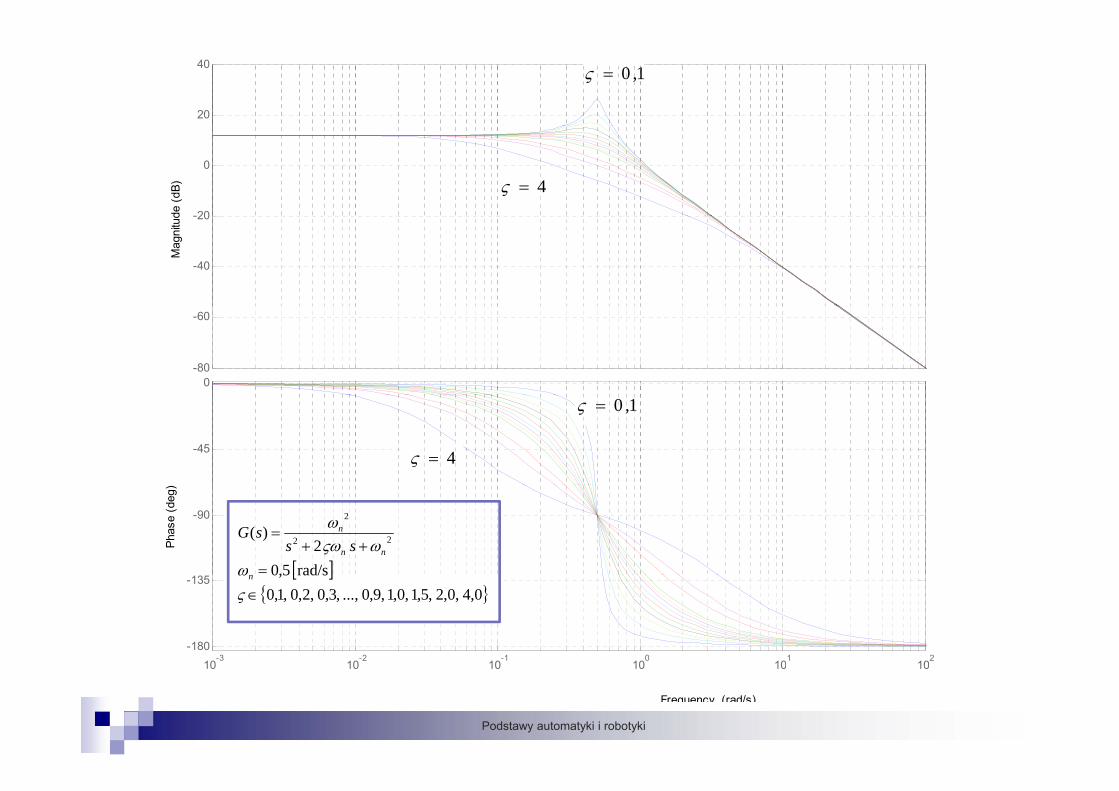
40 1,0=ς
-20
0de
(dB) 4=ς
-40
-20
Mag
nitu
d
0-80
-60
-45
1,0=ς
4=ς
-90
Phas
e (d
eg)
[ ]rad/s5,02
)( 22
2
=++
=
ωωςω
ω
n
nn
n
sssG
10-3
10-2
10-1
100
101
102
-180
-135[ ]
{ }0,4,0,2,5,1,0,1,9,0...,,3,0,2,0,1,0rad/s5,0
∈ςωn
Podstawy automatyki i robotyki
Frequency (rad/s)
10 10 10 10 10 10
Podstawy automatyki i robotyki
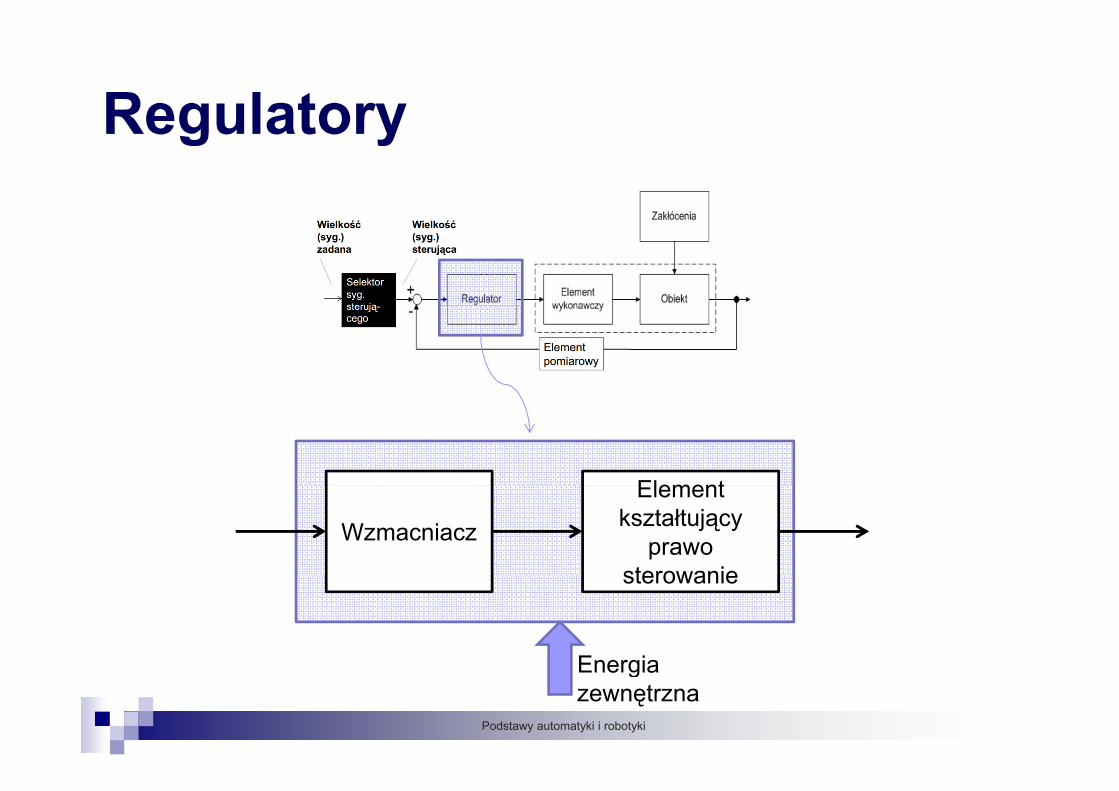
RegulatoryRegulatory
Element
Wzmacniacz
Element kształtujący
prawo sterowaniesterowanie
Energia
Podstawy automatyki i robotyki
Energia zewnętrzna
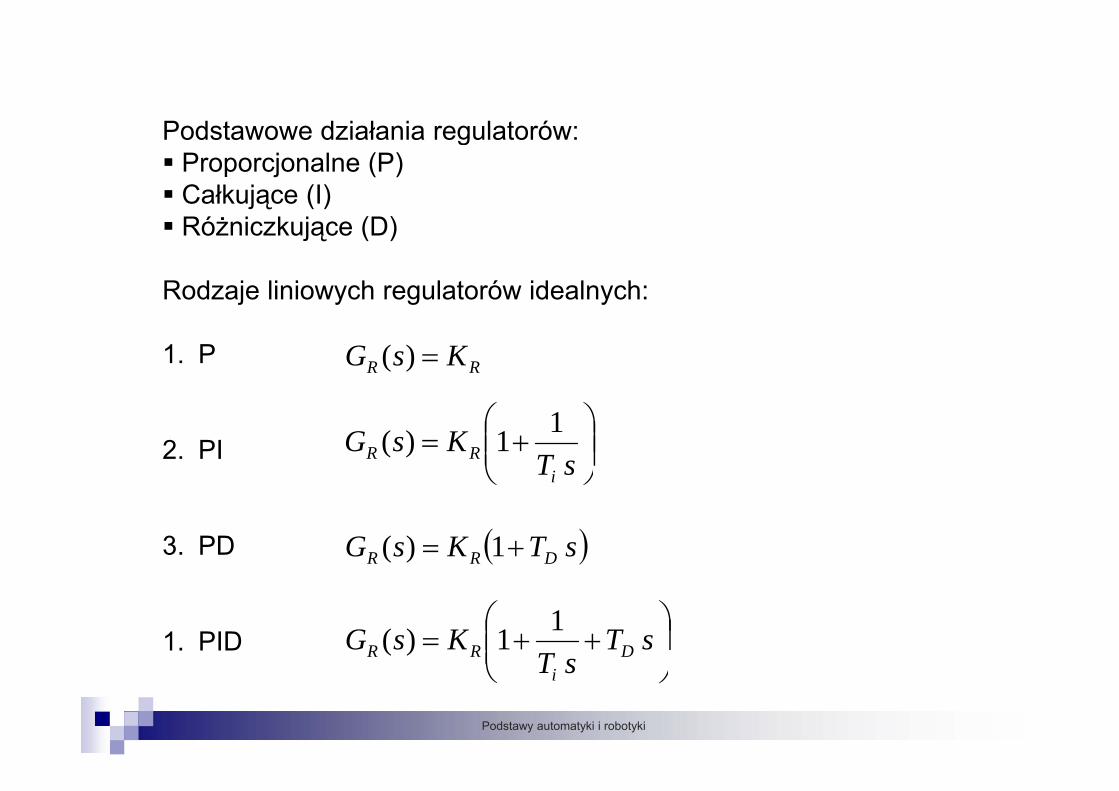
Podstawowe działania regulatorów:Podstawowe działania regulatorów:Proporcjonalne (P)Całkujące (I)Różniczkujące (D)
Rodzaje liniowych regulatorów idealnych:
1. P RR KsG =)(
2. PI ⎟⎟⎠
⎞⎜⎜⎝
⎛+=
sTKsG
iRR
11)(
3. PD ( )sTKsG DRR += 1)(
1. PID ⎟⎟⎠
⎞⎜⎜⎝
⎛++= sT
sTKsG DRR
11)(
Podstawy automatyki i robotyki
⎠⎝ sTi
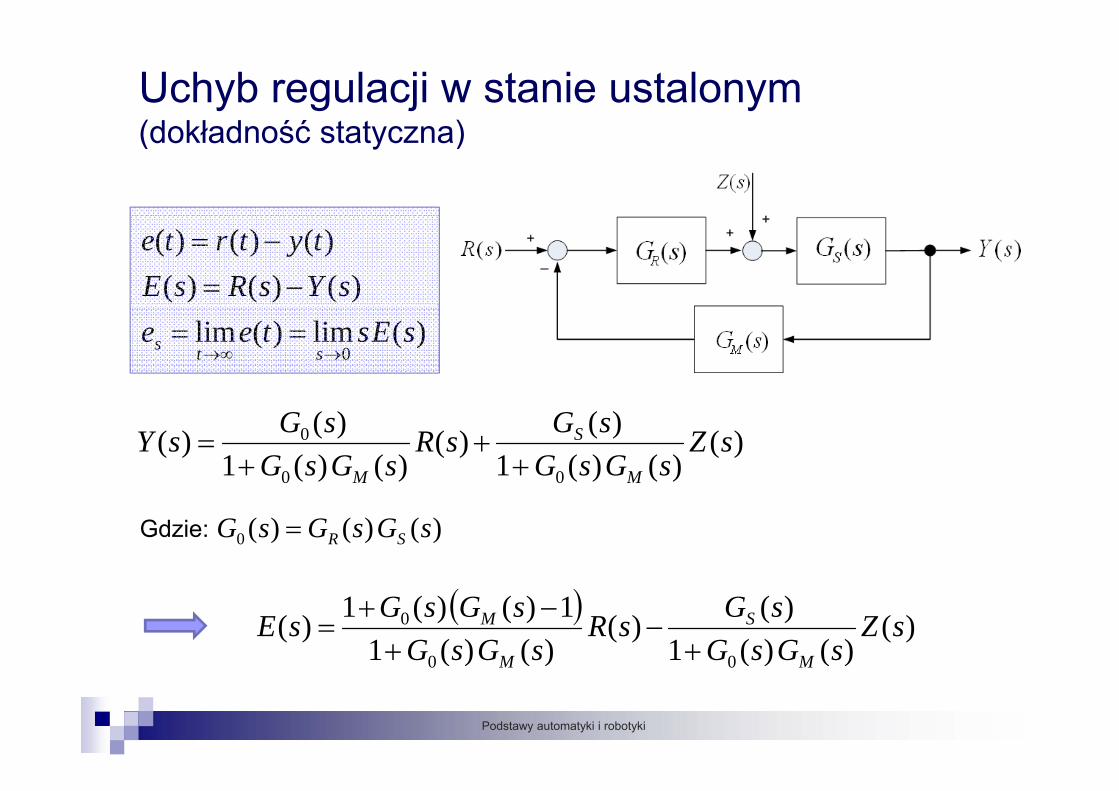
Uchyb regulacji w stanie ustalonym(dokładność stat c na)(dokładność statyczna)
)()()()()()(sYsRsE
tytrte−=
−=
)(lim)(lim0
sEsteests →∞→
==
)()()(1
)()()()(1
)()(00
0 sZsGsG
sGsRsGsG
sGsYM
S
M ++
+=
)()()(0 sGsGsG SR=Gdzie:
( ) )()()(1
)()()()(11)()(1)(
00
0 sZsGsG
sGsRsGsG
sGsGsEM
S
M
M
+−
+−+
=
Podstawy automatyki i robotyki
)()()()( 00 MM
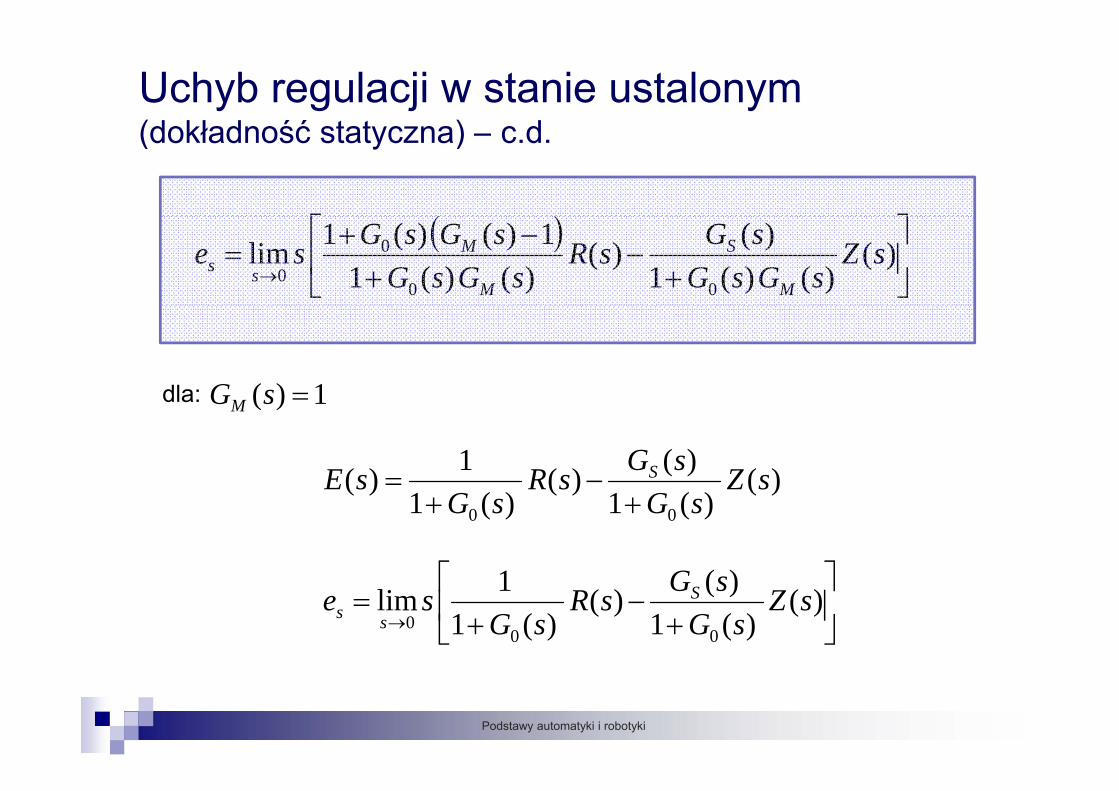
Uchyb regulacji w stanie ustalonym(dokładność stat c na) c d(dokładność statyczna) – c.d.
( ) ⎤⎡ ( )⎥⎦
⎤⎢⎣
⎡+
−+
−+=
→)(
)()(1)()(
)()(11)()(1lim
00
0
0sZ
sGsGsGsR
sGsGsGsGse
M
S
M
M
ss
dla: 1)( =sG
)()()(1)( sZsGsRsE S−=
dla: 1)( =sGM
)()(1
)()(1
)(00
sZsG
sRsG
sE++
⎤⎡ )(1 G⎥⎦
⎤⎢⎣
⎡+
−+
=→
)()(1
)()()(1
1lim00
0sZ
sGsGsR
sGse S
ss
Podstawy automatyki i robotyki
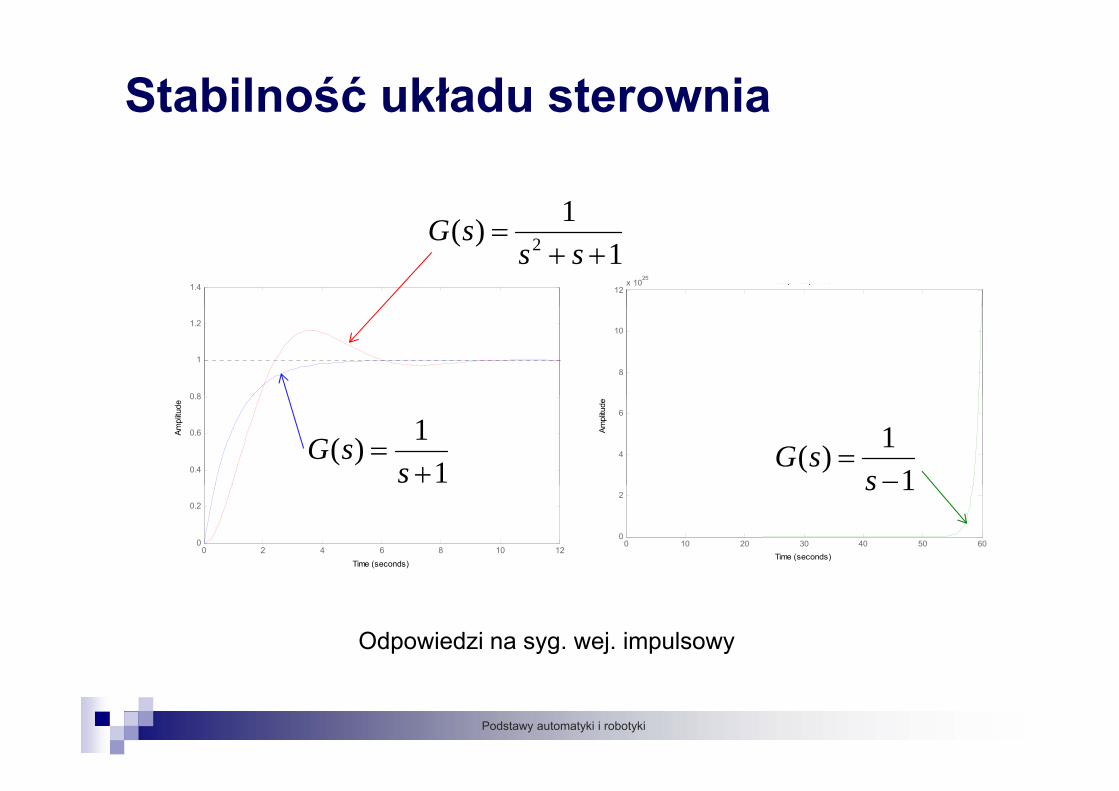
Stabilność układu sterownia
1
Step Response1.4
Step Response12
x 1025
11)( 2 ++
=ss
sG
0 8
1
1.2
8
10
Ampl
itude
0.4
0.6
0.8
Ampl
itude
4
6
11)(+
=s
sG1
1)(−
=s
sG
Time (seconds)0 2 4 6 8 10 12
0
0.2
Time (seconds)0 10 20 30 40 50 60
0
21s
Odpowiedzi na syg. wej. impulsowy
Podstawy automatyki i robotyki
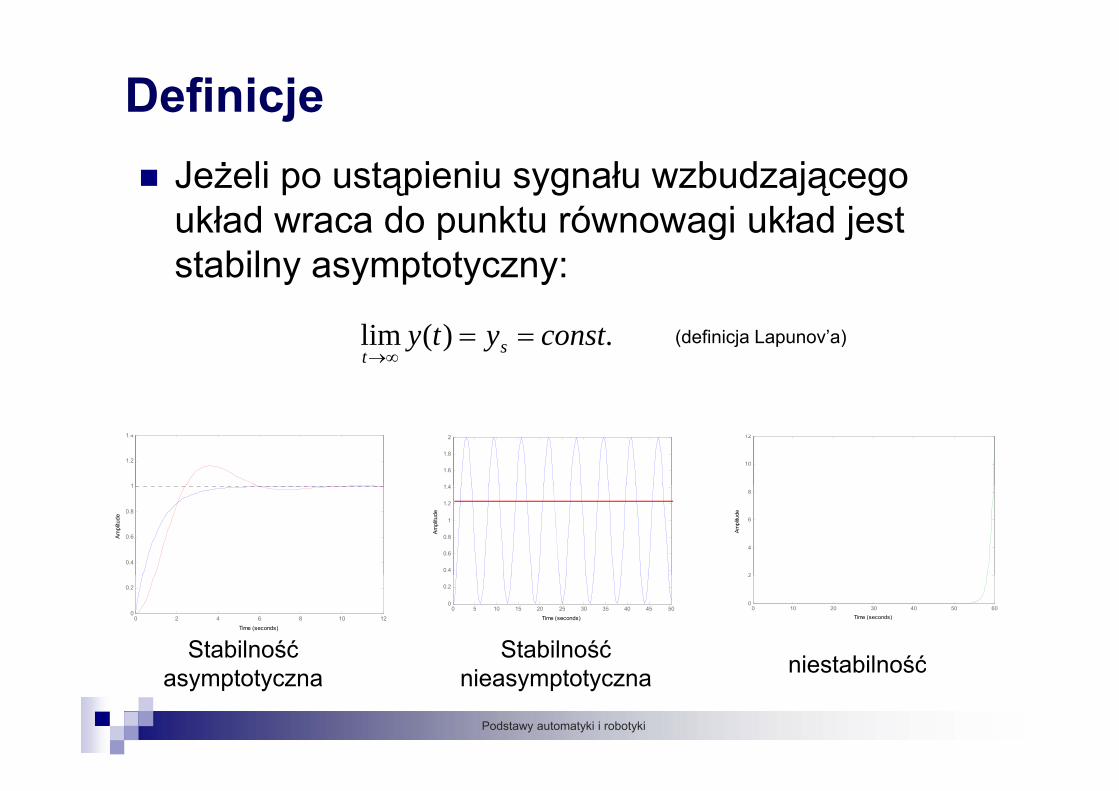
DefinicjeJeżeli po ustąpieniu sygnału wzbudzającego układ wraca do punktu równowagi układ jestukład wraca do punktu równowagi układ jest stabilny asymptotyczny:
.)(lim constyty st==
∞→(definicja Lapunov’a)
Step Response
1
1.2
1.4Step Response
10
12x 10
25
1 4
1.6
1.8
2Step Response
Ampl
itude
0.4
0.6
0.8
1
Ampl
itude
2
4
6
8
0.4
0.6
0.8
1
1.2
1.4
Ampl
itude
Stabilność Stabilność niestabilność
Time (seconds)0 2 4 6 8 10 12
0
0.2
Time (seconds)0 10 20 30 40 50 60
0
2
0 5 10 15 20 25 30 35 40 45 500
0.2
Time (seconds)
Podstawy automatyki i robotyki
asymptotyczna nieasymptotyczna niestabilność
DefinicjeStabilność (lub jej brak) jest cechą nierozłączną danego układu i nie zależy od warunków czasowych (npukładu i nie zależy od warunków czasowych (np. początkowych), brzegowych lub rodzaju i wartości (ograniczonej) sygnału wejściowego.
Sygnał wej., który umożliwia badanie stabilności układu yg j yto impuls jednostkowy Dirac’a (y(t) w powyższych rozważaniach).
Aby zbadać stabilność układu sterowania należy ć h kt t k i l kł dwyznaczyć charakterystykę impulsową układu, a
następnie zastosować definicję stabilności Lapunov’a.
Podstawy automatyki i robotyki
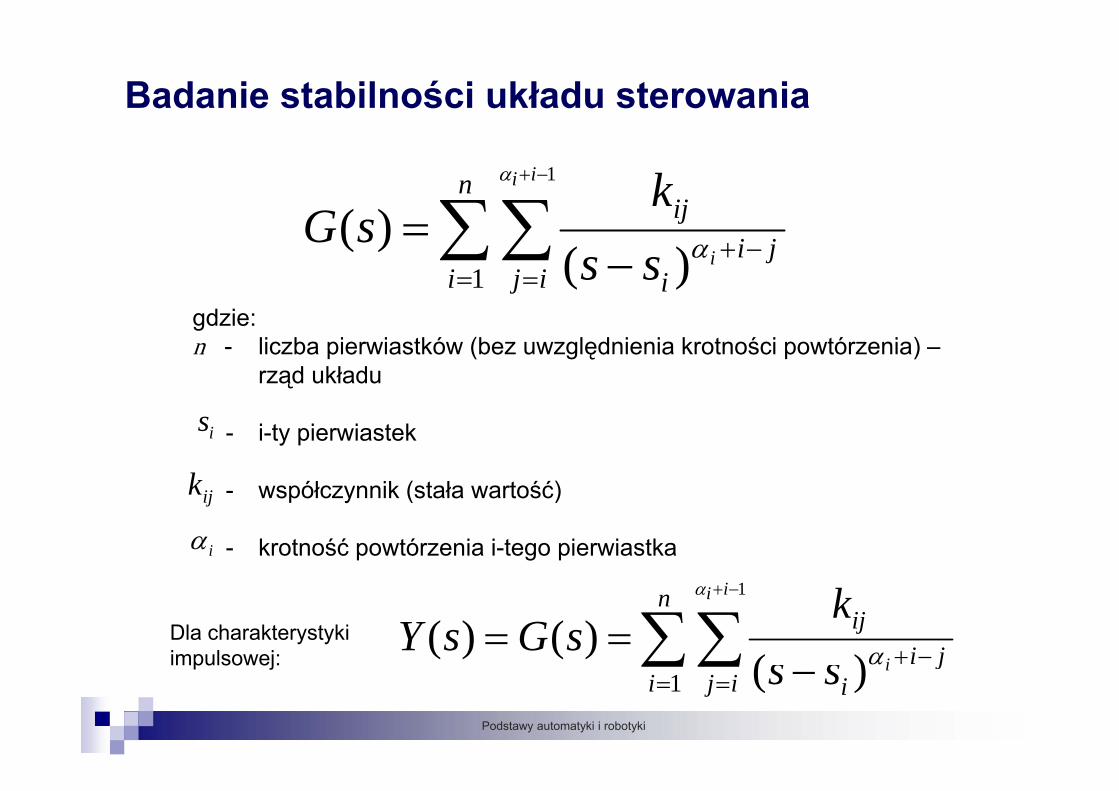
Badanie stabilności układu sterowania
∑∑−+n
ijii k
G1
)(α
∑∑= =
−+−=
i ijji
i
ij
isssG
1 )()( α
gdzie:n - liczba pierwiastków (bez uwzględnienia krotności powtórzenia) –
rząd układu
is - i-ty pierwiastek
spółc nnik (stała artość)k - współczynnik (stała wartość)
- krotność powtórzenia i-tego pierwiastka
ijk
iα
∑∑ −+
−+
==n
jiij
ii
i
ksGsY
1
)()()(
α
αDla charakterystyki impulsowej:
Podstawy automatyki i robotyki
∑∑= = −i ij
ji
iss1 )(impulsowej:
⎫⎧ −+n ii k1α
⎭⎬⎫
⎩⎨⎧
−= ∑∑
= =−+
−n
i ijji
i
ij
issk
Lty1
1
)()( α
⎭⎩ i ij i1 )(
∑∑ +−+n
tsjiijii k )1(
1α
α∑∑= =
−−+
−−+=
i ij
tsji
i
ij ii etji1
)1(
)!1(α
α
∑∑−+
=n
tsij
ii
iij etc1α
β∑∑= =i ij
ij etc1
.1;.)!1(
constjiconstji
kc iij
i
ijij =−−+==
−−+= αβ
α
Podstawy automatyki i robotyki
)!1( jii +α
.)(lim constyty st==
∞→
?
∑∑−+n
tsii
iijtt1
li)(liα
β
t ∞→
∑∑= =
∞→∞→=
i ij
tsijtt
iij etcty1
lim)(lim β
i 1
( )∑∑ +
∞→
−+
=n
tQPijt
ii
iiij etc j1
limα
β
= =∞→ i ijt 1
tQn
tP i
ii
iijt j1
li ∑∑−+α
β tQ
i ij
tPijt
iiij eetc j
1lim∑∑
= =∞→
= β
( )∑∑∞→
−+
+=n
iitP
ijt
ii
iij tQtQetc1
sinjcoslimα
β
Podstawy automatyki i robotyki
= =∞→ i ijt 1
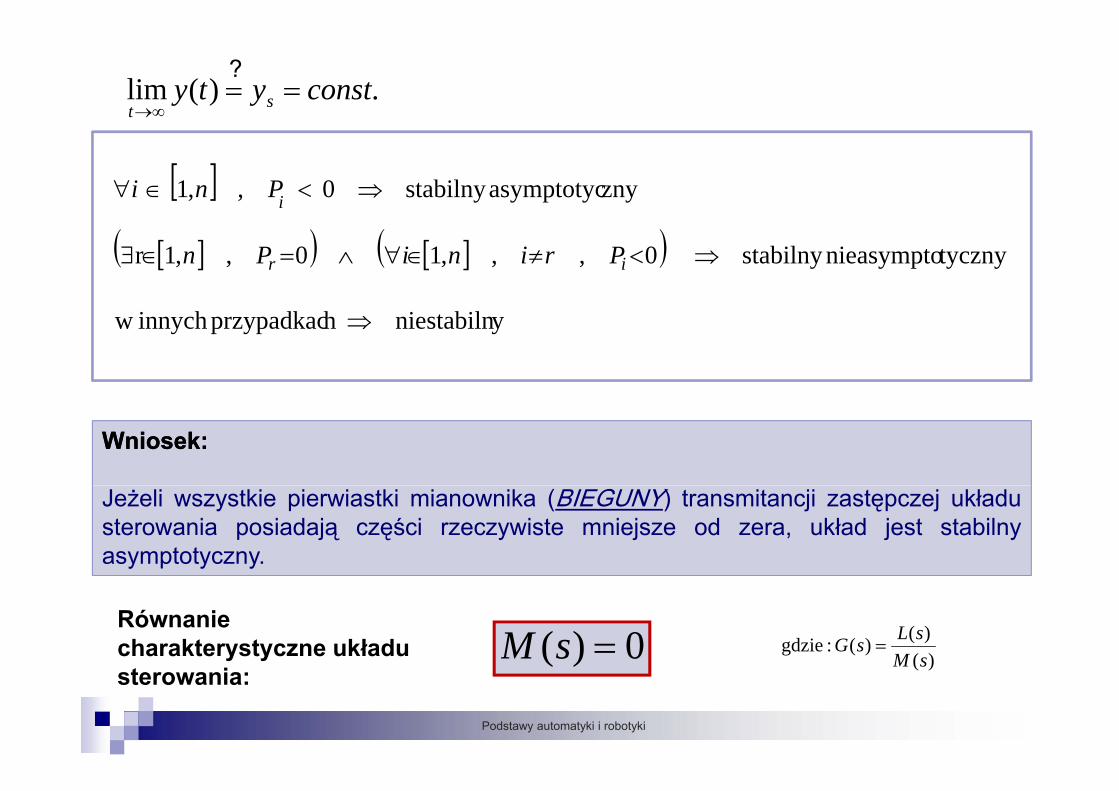
.)(lim constyty st==
∞→
?
[ ] znyasymptotycstabilny0,,1 ⇒<∈∀ iPni
[ ]( ) [ ]( ) tycznynieasymptostabilny0,,,10,,1r ⇒<≠∈∀∧=∈∃ ir PriniPn
yniestabilnhprzypadkacinnych w ⇒
Wniosek:Wniosek:
Jeżeli wszystkie pierwiastki mianownika (BIEGUNY) transmitancji zastępczej układusterowania posiadają części rzeczywiste mniejsze od zera, układ jest stabilnyasymptotyczny.
Równanie charakterystyczne układu 0)( =sM )(
)()(:gdziesMsLsG =
Podstawy automatyki i robotyki
sterowania:)( )(sM
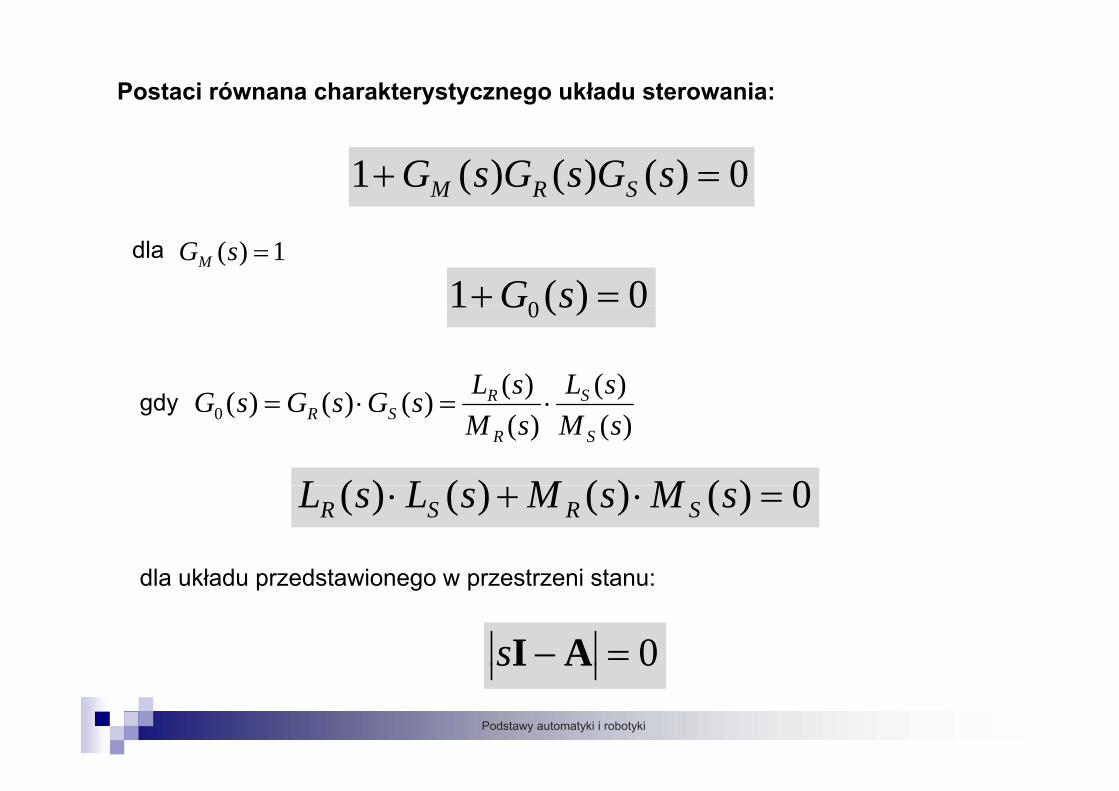
Postaci równana charakterystycznego układu sterowania:
0)()()(1 =+ sGsGsG SRM
dla 1)( =sGM
0)(1 0 =+ sG 0)(1 0+ sG
)()()()()( sLsLGGG SRd)()(
)()()()()(0 sMsM
sGsGsGS
S
R
RSR ⋅=⋅=gdy
0)()()()( MMLL 0)()()()( =⋅+⋅ sMsMsLsL SRSR
dla układu przedstawionego w przestrzeni stanu:dla układu przedstawionego w przestrzeni stanu:
0=−AIsPodstawy automatyki i robotyki
0AIs
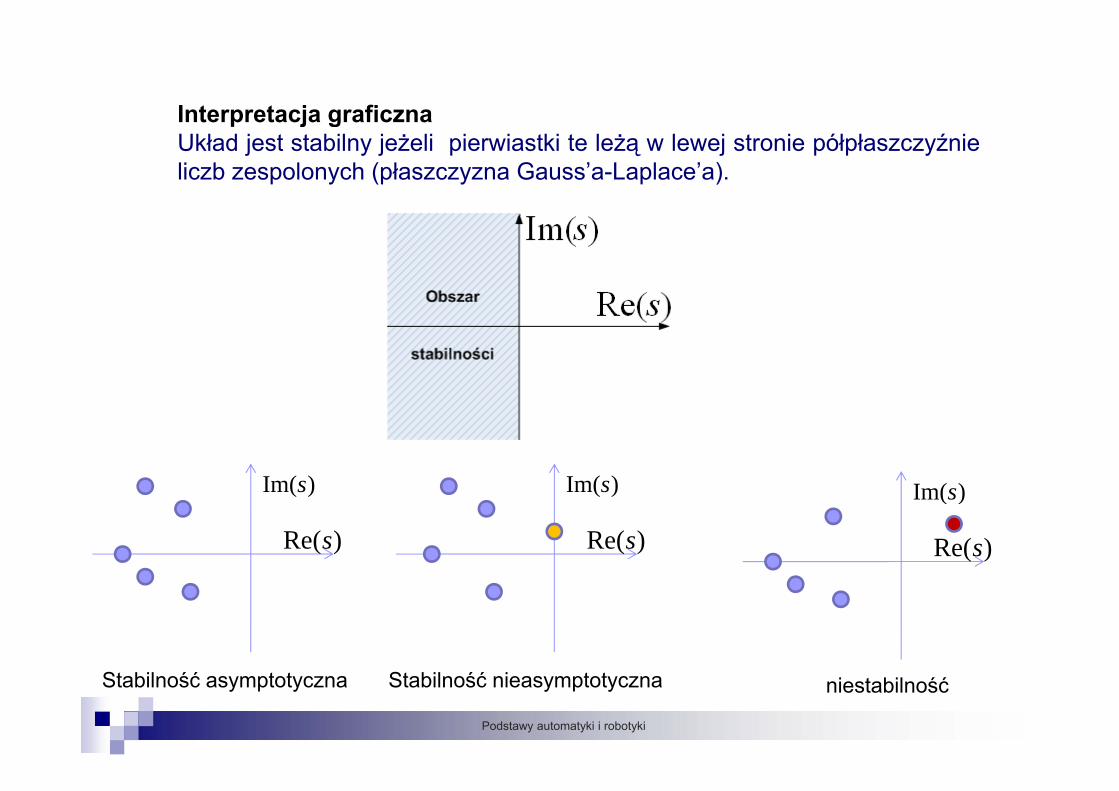
Interpretacja graficznap j gUkład jest stabilny jeżeli pierwiastki te leżą w lewej stronie półpłaszczyźnieliczb zespolonych (płaszczyzna Gauss’a-Laplace’a).
)Im(s )Im(s )I ()Im(s
)Re(s
)Im(s
)Re(s
)Im(s
)Re(s
Podstawy automatyki i robotyki
Stabilność asymptotyczna Stabilność nieasymptotyczna niestabilność
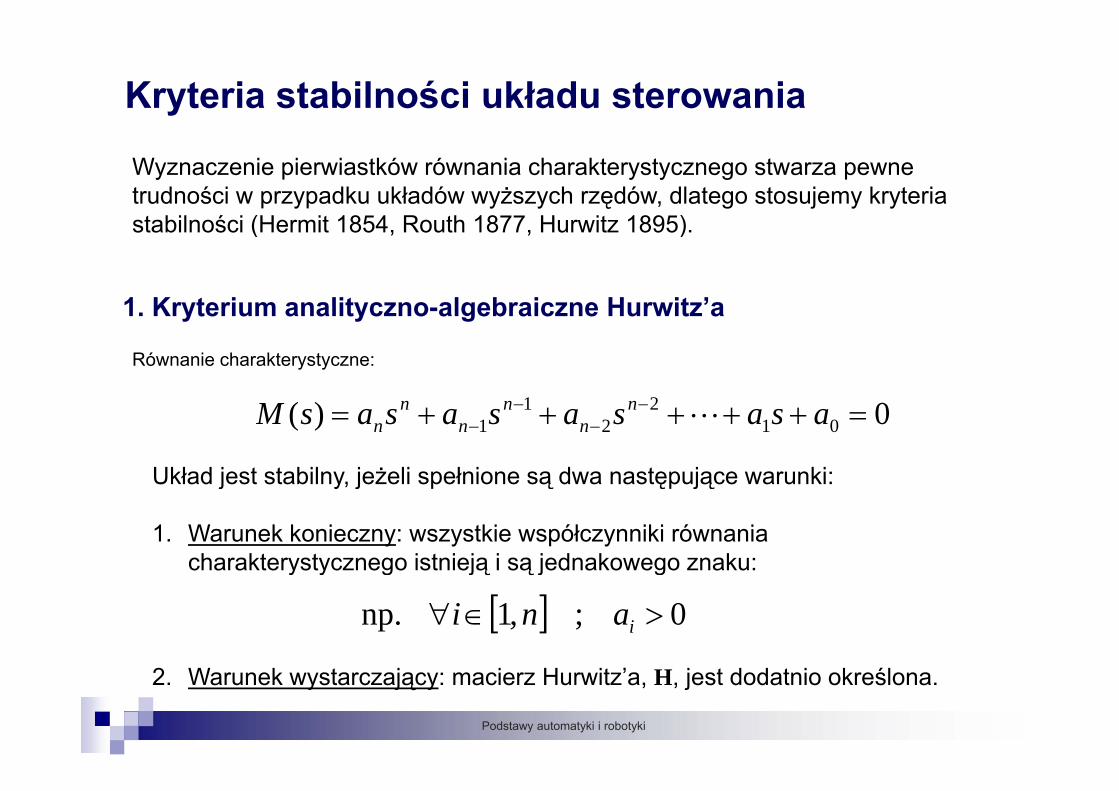
Kryteria stabilności układu sterowania
Wyznaczenie pierwiastków równania charakterystycznego stwarza pewne trudności w przypadku układów wyższych rzędów, dlatego stosujemy kryteria t bil ś i (H it 1854 R th 1877 H it 1895)stabilności (Hermit 1854, Routh 1877, Hurwitz 1895).
1 Kryterium analityczno algebraiczne Hurwitz’a1. Kryterium analityczno-algebraiczne Hurwitz a
Równanie charakterystyczne:
0)( 012
21
1 =+++++= −−
−− asasasasasM n
nn
nn
n L
Układ jest stabilny, jeżeli spełnione są dwa następujące warunki:j y, j p ą ęp ją
1. Warunek konieczny: wszystkie współczynniki równania charakterystycznego istnieją i są jednakowego znaku:y y g j j g
[ ] 0;,1np. >∈∀ iani
Podstawy automatyki i robotyki
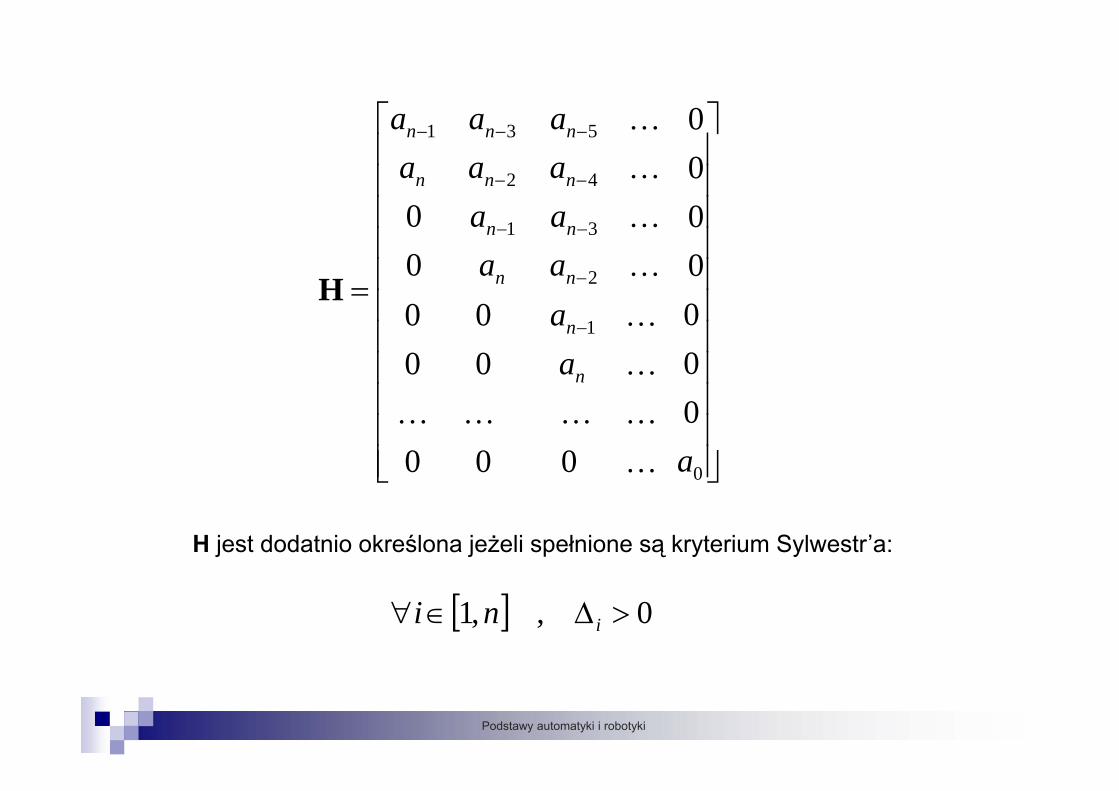
2. Warunek wystarczający: macierz Hurwitz’a, H, jest dodatnio określona.
⎤⎡ 531 0aaa K
⎥⎥⎥⎤
⎢⎢⎢⎡
−−
−−−
42
531
000
0 aaaaaaaa
nnn
nnn
K
K
⎥⎥⎥⎥
⎢⎢⎢⎢
= −
−−
2
31
00000
00
aaaa
nn
nn
K
K
H
⎥⎥⎥⎥
⎢⎢⎢⎢
−1
00
0000
aa
n
n
K
K
⎥⎥⎥
⎦⎢⎢⎢
⎣ 0
0000 aK
KKKK
H jest dodatnio określona jeżeli spełnione są kryterium Sylwestr’a:
[ ] 0,,1 >Δ∈∀ ini
Podstawy automatyki i robotyki