P Baranski Przeksztalcenie Z - Fragment
22
-
Upload
przemekbary -
Category
Documents
-
view
238 -
download
12
description
Zbiór zadań z przekształcenia Z - fragment
Transcript of P Baranski Przeksztalcenie Z - Fragment


Spis treści
Przedmowa 5
Rozdział 1 Przekształcenie Laplace’a 7
Rozdział 2 Wyprowadzenie przekształcenia Z 91. Przykładowe zadania . . . . . . . . . . . . . . . . . . . . . . . . . 102. Zadania do samodzielnego rozwiązania . . . . . . . . . . . . . . . 16
Rozdział 3 Właściwości przekształcenia Z 171. Opóźnienie sygnału . . . . . . . . . . . . . . . . . . . . . . . . . . 172. Różniczkowanie względem zmiennej z . . . . . . . . . . . . . . . . 20
Rozdział 4 Odwrotne przekształcenie Z 231. Wprowadzenie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232. Przykładowe zadania . . . . . . . . . . . . . . . . . . . . . . . . . 25
Rozdział 5 Opis filtrów cyfrowych z zastosowaniem przekształ-cenia Z 29
1. Analiza filtrów w dziedzinie czasu . . . . . . . . . . . . . . . . . . 291.1. Filtr dolnoprzepustowy SOI pierwszego rzędu . . . . . . . 291.2. Filtr górnoprzepustowy SOI pierwszego rzędu . . . . . . . 381.3. Filtr środkowoprzepustowy SOI . . . . . . . . . . . . . . . 441.4. Filtr środkowozaporowy SOI . . . . . . . . . . . . . . . . 481.5. Quiz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 491.6. Filtr dolnoprzepustowy NOI . . . . . . . . . . . . . . . . . 501.7. Filtr górnoprzepustowy NOI . . . . . . . . . . . . . . . . 56
2. Płaszczyzna zmiennej s i zmiennej z . . . . . . . . . . . . . . . . 563. Zadania do samodzielnego rozwiązania . . . . . . . . . . . . . . . 58
Rozdział 6 Transmitancja i właściwości filtrów cyfrowych 631. Zera i bieguny transmitancji . . . . . . . . . . . . . . . . . . . . . 632. Przyczynowość filtra . . . . . . . . . . . . . . . . . . . . . . . . . 653. Odpowiedź filtra o wartościach rzeczywistych . . . . . . . . . . . 684. Stabilność filtrów . . . . . . . . . . . . . . . . . . . . . . . . . . . 695. Quiz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Rozdział 7 Charakterystyki częstotliwościowe filtrów 79
3

SPIS TREŚCI
1. Charakterystyka amplitudowa filtra . . . . . . . . . . . . . . . . . 802. Charakterystyka fazowa filtra . . . . . . . . . . . . . . . . . . . . 90
Rozdział 8 Przekształcenie filtrów analogowych na cyfrowe 991. Właściwości przekształcenia biliniowego . . . . . . . . . . . . . . 102
Rozdział 9 Realizacje filtrów cyfrowych 1091. Realizacja bezpośrednia I rodzaju . . . . . . . . . . . . . . . . . . 1092. Realizacja kaskadowa . . . . . . . . . . . . . . . . . . . . . . . . . 1113. Realizacja równoległa . . . . . . . . . . . . . . . . . . . . . . . . 1184. Realizacja bezpośrednia II rodzaju . . . . . . . . . . . . . . . . . 120
Bibliografia 127
4

Przedmowa
Niniejszy zbiór zadań jest pomocą dydaktyczną do wykładów „Przetwarza-nie Sygnałów” prowadzonych na Wydziale Elektrotechniki, Elektroniki, Infor-matyki i Automatyki Politechniki Łódzkiej. Do opisu sygnałów cyfrowych ko-rzysta się równań różnicowych. Przekształcenie Z jest bardzo efektywnym na-rzędziem do rozwiązywania równań różnicowych, podobnie jak przekształcenieLaplace’a do rozwiązywania równań różniczkowych. Celem skryptu jest zapozna-nie Czytelnika z przekształceniem Z w kontekście filtracji sygnałów cyfrowych.Skrypt składa się z dziewięciu rozdziałów.
W rozdziale pierwszym podano podstawy przekształcenia Laplace’a, którejest fundamentem przekształcenia Z. Rozdział ten wymaga od Czytelnika znajo-mości transformacji Laplace’a oraz analizy matematycznej i jest ograniczony dopodstawowych wzorów i pojęć. Podstawy teoretyczne ww. przekształcenia cał-kowego można znaleźć w książce prof. Michała Tadeusiewicza [1]. Szereg zadańznajduje się w zbiorze zadań dr Kajetany Snopek i prof. Jacka Wojciechowskie-go [2].
W następnym rozdziale wprowadzono pojęcie przekształcenia Z. Rozdziałzawiera kilkanaście rozwiązanych zadań – transformaty podstawowych sygna-łów. Ogólniejsze spojrzenie na przekształcenie Z zawarte jest w książce prof.Jacka Kudrewicza [3].
W trzecim rozdziale omówiono właściwości przekształcenia Z. Rozdział tenzawiera zadania, których zrozumienie jest kluczowe przy późniejszym omawianiustabilności i przyczynowości filtrów.
Rozdział czwarty jest poświęcony odwrotnemu przekształceniu Z obliczane-mu przy użyciu metody rozkładu na ułamki proste.
Rozdział piąty jest wprowadzeniem do filtracji cyfrowej sygnałów. Prosteprzykłady wprowadzają Czytelnika do filtrów o skończonej odpowiedzi impulso-wej (tzw. filtry SOI). Zawarte w rozdziale zadania, które można rozwiązać przypomocy arkusza kalkulacyjnego, pozwalają poznać proste filtry górnoprzepu-stowe, pasmowoprzepustowe i pasmowozaporowe. Rozdział ten uwidacznia jakefektywnym narzędziem przy analizie filtrów cyfrowych jest przekształcenie Z.Stosując przekształcenie Z uzyskujemy wynik kilkakrotnie szybciej niż rachun-kiem bezpośrednim. W dalszej części rozdziału omawiane są filtry o nieskoń-czonej odpowiedzi impulsowej (tzw. filtry NOI). Prosty przykład rachunkowy –
5

SPIS TREŚCI
liczenie średniej z próbek – pokazuje podstawowe właściwości filtrów NOI.Rozdział szósty zawiera wiele przykładów. Służy on omówieniu stabilno-
ści i przyczynowości filtrów. Quiz na końcu rozdziału pozwala nabrać biegłościw rozpoznawaniu różnych właściwości filtrów cyfrowych.
W rozdziale siódmym omówiono charakterystyki częstotliwościowe filtrów.Na podstawie wielu przykładów pokazano wpływ biegunów i zer transmitan-cji filtra na charakterystykę amplitudową. Wyjaśniono charakterystykę fazowąfiltra, której znaczenie jest często zaniedbywane przez projektantów. Test nakońcu rozdziału pozwala na weryfikację zdobytej wiedzy.
W ósmym rozdziale zdefiniowano przekształcenie biliniowe, które pozwala nawykorzystanie analogowego prototypu filtra do budowy cyfrowego odpowiedni-ka. Omówiono właściwości tego przekształcenia m.in. w kontekście projektowa-nia filtrów dolno- i górnoprzepustowych.
W ostatnim rozdziale omówiono różne sposoby realizacji filtrów cyfrowych:realizacja bezpośrednia I i II rodzaju, kaskadowa, równoległa. Poruszono równieżkwestię stabilności filtrów NOI.
Chciałbym serdecznie podziękować Panu profesorowi Pawłowi Strumiłło,wieloletniemu opiekunowi, za motywację do pracy oraz lekturę i dyskusje nadpierwszą wersją skryptu. Dziękuję Panu doktorowi Andrzejowi Kuczyńskiemuza bardzo cenne sugestie dotyczące zawartości skryptu. Szczególne podziękowa-nia składam Panu profesorowi Michałowi Tadeusiewiczowi za czas poświęconyna recenzję skryptu oraz bardzo trafne uwagi merytoryczne.
6

Rozdział 6Transmitancja i właściwościfiltrów cyfrowych
1. Zera i bieguny transmitancji
Już wcześniej rozważaliśmy transmitancję filtra, w której wprowadziliśmypojęcie zer i biegunów. Transmitancję można zapisać w postaci ułamka (6.1),mnożąc licznik i mianownik przez z do odpowiedniej potęgi. Wielomian stopniaN posiada N+1 współczynników (np. N = 2; az2+bz+c) i N miejsc zerowych(np.N = 2; a(z−z1)(z−z2)). Pamiętamy, że z jest zmienną zespoloną i będziemyposzukiwali miejsc zerowych, które mogą być liczbami zespolonymi. Zatem:
H(z) =b0 z
N + b1 zN−1 + . . .+ bN−1 z+ bN
zM + a1 zM−1 + . . .+ aM−1 z+ aM(6.1)
H(z) =b0(z− o0)(z− o1) · . . . · (z− oN−1)
(z− p0)(z− p1) · . . . · (z− oM−1)= b0
N−1∏n=0
(z− on)
M−1∏m=0
(z− pm)
(6.2)
gdzie on są miejscami zerowymi licznika i nazywamy je zerami transmitancji,a pm są miejscami zerowymi mianownika i nazywamy je biegunami transmitan-cji. Na płaszczyźnie z bieguny będziemy oznaczać symbolem ×, a zera symbo-lem ◦.
Zbadajmy charakterystykę widmową filtra danego równaniem różnicowym:
y(n) = −y(n− 2) + x(n− 1) − x(n− 2).
Transmitancja tego filtra NOI wynosi:
H(z) =z− 1
z2 + 1=
z− 1
(z− j)(z+ j).
63

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
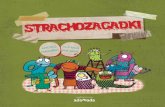
Filtr ten posiada jedno zero o0 = 1 i dwa bieguny p0 = j oraz p1 = −j.Zaznaczmy to na płaszczyźnie z – rysunek 6.1. Na podstawie położenia zeri biegunów można bardzo łatwo wyznaczyć charakterystykę amplitudową filtra.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
Rys. 6.1. Położenie zer i biegunów na płaszczyźnie z filtra danego równaniem różnico-wym y(n) = −y(n − 2) + x(n − 1) − x(n − 2)
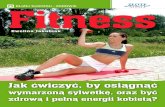
Teraz wykonajmy zadanie odwrotne, tj. na podstawie wykresu zer i biegunówfiltra pokazanego na rysunku 6.2 odtworzymy równanie różnicowe filtra.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
Rys. 6.2. Zera i bieguny filtra NOI
Filtr posiada jedno zero o0 = −1 oraz dwa bieguny p0 = 0.5 + j0.5 orazp1 = 0.5− j0.5. Transmitancja:
64

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
H(z) =z− o0
(z− p0)(z− p1)=
z+ 1
z2 − 2 Re{p0}+ |p0|2=
z+ 1
z2 − z+ 0.5
gdzie skorzystaliśmy ze wzoru na (z − p)(z − p∗). Transmitancja wyznaczonajest z dokładnością do współczynnika proporcjonalności – współczynnik b0 wewzorze (6.2).
(z− p)(z− p∗) = z2 − 2z Re{p}+ |p|2
Zapamiętaj
Dzielimy licznik i mianownik przez z2, tj. wyraz w największej potędze mia-nownika:
H(z) =Y(z)
X(z)=
z−1 + z−2
1− z−1 + 0.5 z−2
stąd:
Y(z) − Y(z)−1 + 0.5 Y(z) z−2 = X(z) z−1 + X(z) z−2
a odpowiadające tej transmitancji równanie różnicowe jest dane w postaci:
y(n) − y(n− 1) + 0.5 y(n− 2) = x(n− 1) + x(n− 2)
lub w postaci:
y(n) = y(n− 1) − 0.5 y(n− 2) + x(n− 1) + x(n− 2).
2. Przyczynowość filtra
Filtr jest przyczynowy, gdy jego odpowiedź nie występuje przed pobudze-niem. Filtr nieprzyczynowy to taki, którego odpowiedź występuje przed pobu-dzeniem. Oznaczałoby to, że filtr posiada możliwość „patrzenia w przyszłość”i wysterowania wyjścia przed wystąpieniem pobudzenia. Takich filtrów nie moż-na zbudować w praktyce. Rozważmy filtr o następującej transmitancji, określmyjego odpowiedź impulsową i wykreślimy na wykresie:
H(z) =z2 − 0.5z
z+ 0.5=z(z− 0.5)
z+ 0.5.
65

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Filtr posiada dwa zera: o0 = 0, o1 = 0.5 oraz jeden biegun p0 = −0.5. Obliczmyodpowiedź impulsową tego filtra:
Y(z) =z(z− 0.5)
z+ 0.5· 1 = z2 + 0.5z− z
z+ 0.5= z
z+ 0.5
z+ 0.5−
z
z+ 0.5= z−
z
z+ 0.5.
Odpowiedź w dziedzinie czasu (korzystając z dwustronnego przekształcenia Zomówionego w rozdziale 4) jest następująca:
y(n) = δ(n+ 1) − u(n) · (−0.5)n
a jej wykres jest pokazany na rysunku 6.3.
n-2 -1 0 1 2 3 4
-1
0
1
2
◦ x(n) • y(n)
•
•
•
•• •
Rys. 6.3. Odpowiedź impulsowa filtra nieprzyczynowego
Odpowiedź filtra występuje w chwili n = −1 przed faktycznym pobudzeniemw chwili n = 0. Wyznaczmy równanie różnicowe filtra. Podzielmy licznik i mia-nownik transmitancji przez z:
H(z) =Y(z)
X(z)=
z− 0.5
1+ 0.5z−1
Y(z) (1+ 0.5 z−1) = X(z) · (z− 0.5).Równanie różnicowe:
y(n) + 0.5 y(n− 1) = x(n+ 1) − 0.5 x(n)
lub
y(n) = −0.5 y(n− 1) + x(n+ 1) − 0.5 x(n).
Z równania różnicowego widać, że filtr wyznacza wynik na podstawie próbkiz przyszłości x(n+1). Jest to filtr nieprzyczynowy. Filtr nieprzyczynowy możnaprzekształcić do filtra przyczynowego opóźniając tor pobierania próbek x(n).W naszym przypadku, po opóźnieniu toru próbek wejściowych o jeden cykluzyskujemy filtr:
y(n) = −0.5 y(n− 1) + x(n) − 0.5 x(n− 1).
66

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Transmitancja tego filtra przyczynowego jest równa:
H(z) =1− 0.5z−1
1+ 0.5z−1=z2 − 0.5z
z2 + 0.5z.
Ponieważ opóźnienie o jedną próbkę odpowiada pomnożeniu przez z−1, transmi-tancję omawianego filtra nieprzyczynowego można przekształcić do transmitan-cji filtra przyczynowego poprzez pomnożenie licznika przez z−1 (lub mianownikaprzez z1).
Można łatwo pokazać, że dla filtra nieprzyczynowego stopień wielomianuw liczniku transmitancji N jest większy od stopnia wielomianu mianownika M– lub inaczej mówiąc, liczba zer transmitancji jest większa od liczby biegunów.
Filtr jest przyczynowy, gdy:
◦ stopień wielomianu mianownika M jest większy lub równy stopniuwielomianu licznika N, co jest równoważne stwierdzeniu, że:
◦ liczba biegunów jest większa lub równa liczbie zer transmitancjifiltra.
Zapamiętaj
Zadania
Dla podanych transmitancji filtrów:
◦ określ liczbę zer i biegunów,
◦ oblicz i wykreśl odpowiedź impulsową,
◦ nieprzyczynowy przekształć do filtrów przyczynowych.
1. H(z) = z3
z2−1,
2. H(z) = z,
3. H(z) = z2−1z2+1
,
4. H(z) = z4−1z2
.
67

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
3. Odpowiedź filtra o wartościach rzeczywistych
Aby filtr posiadał odpowiedź o wartościach rzeczywistych w dziedzinie cza-su wszystkie zera i bieguny posiadające część urojoną muszą posiadać swojesprzężone odpowiedniki. Rozważmy prosty przykład pokazany na rysunku 6.4.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
Rys. 6.4. Filtr o jednym biegunie zespolonym
Transmitancja filtra wynosi:
H(z) =z
z− j
a odpowiedź impulsowa:
y(n) = u(n) · jn = {1, j,−1,−j, 1, . . .}
jest zespolona. Rozważmy teraz filtr, gdzie biegun p0 = 0+ j ma swój sprzężonyodpowiednik p1 = 0− j (rysunek 6.5). Transmitancja tego filtra jest postaci:
H(z) =z
(z− j)(z+ j)=
z
z2 + 1
a odpowiedź impulsowa składa się z wyrazów o wartościach rzeczywistych:
y(n) = u(n) · sin(nπ
2
)= {0, 1, 0,−1, 0, 1, . . .}.
Podobnie sytuacja wygląda dla zer transmitancji. Bieguny i zera posiadającetylko część rzeczywistą nie muszą mieć sprzężonych odpowiedników.
68

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
Rys. 6.5. Filtr o dwóch biegunach sprzężonych
Bieguny i zera filtrów posiadające część urojoną muszą posiadać sprzężo-ne odpowiedniki, aby odpowiedź czasowa filtra miała wyłącznie wartościrzeczywiste.
Zapamiętaj
4. Stabilność filtrów
Rozważmy prosty filtr NOI o strukturze pokazanej na rysunku 6.6. Równanieróżnicowe tego filtra jest następujące:
y(n) = 1.1 y(n− 1) + x(n).
Przeanalizujmy ten filtr. Pobudźmy filtr deltą Kroneckera i wyznaczmy odpo-wiedź filtra metodą rachunku bezpośredniego.
n 0 1 2 3 4 5 6 7 8x(n) 1 0 0 0 0 0 0 0 0
y(n− 1) 0 1 1.1 1.21 1.33 1.46 1.61 1.77 1.95y(n) 1 1.1 1.21 1.33 1.46 1.61 1.77 1.95 2.14
69

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
x(n) + y(n)
1.1
y(n− 1)z−1
Rys. 6.6. Przykładowy niestabilny filtr NOI
Odpowiedź impulsową pokazano na rysunku 6.7.
n1 2 3 4 5 6 7 8
-1
0
1
2
3
◦ x(n) • y(n)
• • • • • • • • •
Rys. 6.7. Odpowiedź impulsowa filtra NOI z rysunku 6.6
Kolejne próbki sygnału wyjściowego zwiększają się zgodnie z postępem geo-metrycznym i rosną do nieskończoności. Filtr ten jest niestabilny. Filtr o iden-tycznej strukturze rozważaliśmy w rozdziale 1.6., jednak jego odpowiedź impul-sowa zanikała do 0. Od czego zatem zależy czy filtr jest stabilny, czy niestabilny?
Przeanalizujmy filtr przy użyciu przekształcenia Z. Transmitancja tego filtrawynosi:
H(z) =z
z− 1.1
a odpowiedź impulsowa:
y(n) = 1.1n.
Przypomnijmy, że transformata odwrotna:
Y(z) =z
z− b
70

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
jest równa:
y(n) = bn.
Gdy b > 1, wartości próbek na wyjściu filtra będą się zwiększać. Wyznaczmyjeszcze odpowiedź impulsową filtra dla ujemnych wartości b. Rozważmy filtro transmitancji:
H(z) =z
z+ 1.1.
Jego odpowiedź impulsowa jest ciągiem próbek:
y(n) = (−1.1)n = {1,−1.1, 1.21,−1.33, 1.46,−1.61, 1.77,−1.95, 2.14,−2.36, . . .}.
Bezwzględne wartości kolejnych próbek na wyjściu filtra zwiększają się. Filtr tenjest niestabilny. Aby filtr był stabilny należy przyjąć |b| < 1. Podobne rozważa-nia można poczynić, gdy b jest biegunem zespolonym i tym razem otrzymamywarunek stabilności filtra |b| < 1 – czyli moduł bieguna powinien być mniej-szy od 1, tj. odległość bieguna od początku układu współrzędnych powinna byćmniejsza od 1. Oznacza to, że aby filtr był stabilny wszystkie bieguny filtramuszą leżeć wewnątrz okręgu jednostkowego, tj. okręgu o promieniu 1.
Wykreślmy na płaszczyźnie z bieguny i zera dla omawianego filtra o trans-mitancji z
z−1.1 i stabilnego filtra omawianego w rozdziale 1.6. o transmitancjiz
z−0.5 – rysunek 6.8.
Re{z}
-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
a) Filtr niestabilnyH(z) = z
z−1.1
y(n) = 1.1n
Re{z}
-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
b) Filtr stabilnyH(z) = z
z−0.5
y(n) = 0.5n
Rys. 6.8. Przykłady filtrów NOI niestabilnego i stabilnego
71

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Aby filtr był stabilny, wszystkie jego bieguny powinny leżeć wewnątrzokręgu o promieniu 1. Odpowiedź impulsowa takiego filtra zanika dozera. Każdy filtr nierekursywny, tj. filtr SOI, jest stabilny.
Zapamiętaj
Zajmijmy się teraz pewnym szczególnym przypadkiem, który może zainte-resować czytelnika. Co się stanie, gdy biegun leży dokładnie na okręgu jednost-kowym? Rozważmy filtr o transmitancji:
H(z) =1
z− 1.
Odpowiedź impulsowa takiego filtra jest równa:
y(n) = u(n− 1)
więc wydaje się, że filtr jest stabilny. Spójrzmy natomiast co się stanie, gdypodamy na wejście skok jednostkowy. Wówczas odpowiedź filtra:
Y(z) =z
(z− 1)2.
Transformatę odwrotną obliczaliśmy w rozdziale 2. i wynosi ona:
y(n) = n u(n) = {0, 1, 2, 3, . . .}.
Filtr jest ewidentnie niestabilny. Rozważmy podobny stabilny filtr, którego bie-gun znajduje się wewnątrz okręgu:
H(z) =1
z− 0.9.
Zbadajmy odpowiedź filtra na skok jednostkowy:
Y(z) =1
z− 0.9· z
z− 1
Y(z)
z=
−10
z− 0.9+
10
z− 1
Y(z) = −10z
z− 0.9+ 10
z
z− 1
y(n) = −10 · 0.9n + 10 u(n).
Składnik 0.9n zanika ze wzrostem n. Filtr jest stabilny.
72

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Zadanie 23
Dany jest filtr o transmitancji:
H(z) =z2
z2 + 1.21.
Sprawdzić czy filtr jest stabilny, badając jego odpowiedź impulsową w dziedzinieczasu.Rozwiązanie:
H(z) =z2
(z+ j1.1)(z− j1.1).
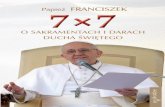
Położenie zer i biegunów filtra pokazano na rysunku 6.9.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
Rys. 6.9. Położenie zer i biegunów filtra o transmitancji H(z) = z2
z2+1.21
Obydwa bieguny leżą poza okręgiem jednostkowym, więc należy się spodzie-wać, że filtr jest niestabilny. Obliczmy odpowiedź impulsową:
Y(z)
z=
z
(z+ j1.1)(z− j1.1)=
A
z+ j1.1+
B
z− j1.1.
Po obliczeniach znajdujemy A = 0.5 i B = 0.5, zatem:
y(n) = 0.5((−1.1j)n + (1.1j)n
)= 0.5
((1.1e
−jπ2 )n + (1.1e
jπ2 )n
)
y(n) = 0.5 · 1.1n(ejπn2 + e
−jπn2
)
y(n) = 1.1n · cos(nπ
2
).
73

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Odpowiedź impulsowa filtra pokazana jest na rysunku 6.10. Filtr, jak słusznieprzypuszczaliśmy, jest niestabilny.
n1 2 3 4 5 6 7 8
-3
-2
-1
0
1
2
3
◦ x(n) • y(n)
•
•
•
•
•
•
•
•
•
Rys. 6.10. Odpowiedź impulsowa filtra o zerach i biegunach pokazanych na rysunku 6.9
5. Quiz
Wybierz jedną lub więcej poprawnych odpowiedzi.
Zadanie 24
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
74

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
Zadanie 25
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
75

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Zadanie 26
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
Zadanie 27
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
76

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
Zadanie 28
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
77

ROZDZIAŁ 6. TRANSMITANCJA I WŁAŚCIWOŚCI FILTRÓWCYFROWYCH
Zadanie 29
Filtr o biegunach i zerach pokazanych na rysunku jest filtrem:
◦ stabilnym,
◦ niestabilnym,
◦ przyczynowym,
◦ nieprzyczynowym,
◦ którego odpowiedź impulsowa jest rzeczywista,
◦ którego odpowiedź impulsowa jest zespolona.
Re{z}-1.5 -0.5 0.5 1.5
Im{z}
-1.5
-0.5
0.5
1.5
×
×
78

Pełna wersja książki dostępna pod adresem:http://www.wydawnictwa.p.lodz.pl