Flatter Wyklad -F.a Dul 2006
69
AEROELASTYCZNOŚĆ 4.3.11. FLATTER PANELOWY 4.3. ZJAWISKA AEROELASTYCZNE DYNAMICZNE © F.A. Dul 2006 4.3.11. FLATTER PANELOWY
-
Upload
anonymous-ej5zeyvud -
Category
Documents
-
view
82 -
download
11
description
Wykady Flatter PW
Transcript of Flatter Wyklad -F.a Dul 2006

AEROELASTYCZNOŚĆ
4.3.11. FLATTER PANELOWY
4.3. ZJAWISKA AEROELASTYCZNE DYNAMICZNE
© F.A. Dul 2006
4.3.11. FLATTER PANELOWY

Flatter panelowy
Flatter panelowy są to drgania samowzbudne poszycia rakiety lub samolotu lecących z prędkością naddźwiekową.
w(x,t)U
Powłoka nieodkształcona
Powłoka odkształcona
4.3.11. Flatter panelowy
Flatter panelowy wystąpił po raz pierwszy na rakiecie V-2 w roku 1943.
© F.A. Dul 2006

Uproszczony model płytowy flatteru panelowego
q1(t)
Ux
q2(t)
kkl
xx
Ciśnienie w przepływie naddźwiękowym (model tłokowy)
4.3.11. Flatter panelowy
026
1
3
22
2
121 =+++ qM
Ukqqmlqml
ρ&&&&
023
2
6
11
2
221 =−++ qM
Ukqqmlqml
ρ&&&&
Równania ruchu płytdx
dw
M
Up
2ρ=
Ciśnienie w przepływie naddźwiękowym (model tłokowy)
© F.A. Dul 2006

ZałoŜenie ruchu harmonicznego
Równania flatteru panelowego
titi eqtqeqtq ωω2211 )(,)( ==
026
1
3
22
2
122
12 =++−− q
M
Uqkqmlqml
ρωω
023
2
6
11
2
222
12 =−+−− q
M
Uqkqmlqml
ρωω
4.3.11. Flatter panelowy
Równania flatteru w postaci macierzowej
0qA =),( Uω
Wyznacznik flatterowy
],[ 21 qq=q
0),(det =UωA
© F.A. Dul 2006

Rozwiązanie równania flatteru
−±= 2
22 )
2(151
5
2
5
8
Mk
U
ml
k ρω
ρMk
U F 72.0=
Prędkość krytyczna flatteru panelowego
4.3.11. Flatter panelowy
ml
k
ml
kF 26.1
5
8 ==ω
Krytyczna częstość drgań flatteru panelowego
© F.A. Dul 2006

Pierwsza postać drgań swobodnych
q12 = +1q11 = +1
=
1
11q
q22 = +1
−=
1q
Druga postać drgań swobodnych
4.3.11. Flatter panelowy
q21 = -1
−=
1
12q
−=
1
127.0Fq
Postać drgań flatterowych
© F.A. Dul 2006
qF2 = +1
qF1 = -0.127
U∞∞∞∞

Własno ści flatteru panelowego• Prędkość krytyczna flatteru panelowego rośnie ze wzrostem
sztywności poszycia.• Prędkość krytyczna flatteru panelowego maleje ze wzrostem
gęstości powietrza. • Postać dgrań flatterowych jest kombinacją postaci drgań
własnych poszycia.• Maksymalna amplituda drgań leŜy w tylnej części elementu
poszycia.
4.3.11. Flatter panelowy
poszycia. • Amplitudy drgań flatteru panelowgo są bardzo małe, ale flatter
panelowy moŜe doprowadzić do zniszczenia poszycia.
© F.A. Dul 2006

Model płytowy flatteru panelowegoRównanie ruchu płyty
Warunki brzegowe dla płyty podpartej swobodnie
Parametry modelu
01
22
2
4
4
2
2
2
240 =
∂∂+
∂∂+
∂∂+
∂∂
−−+
∂∂
ξλ
ξξλ WW
RW
t
W
U
a
M
M
t
W
D
amxx
1/2 23 −= MDqaλDaNR xxxx /2)0(−=
4.3.11. Flatter panelowy
Warunki brzegowe dla płyty podpartej swobodnie
Warunki brzegowe płyty utwierdzonej
0)(
,0)(,0)0(
,0)0( =∂
∂==∂
∂=ξξaW
aWW
W
0)(
,0)(,0)0(
,0)0(2
2
2
2
=∂
∂==∂
∂=ξξ
aWaW
WW
© F.A. Dul 2006

ZałoŜenie harmonicznej postaci przemieszczenia
Równanie flatteru panelowego
teWtW αξξ )(),( =
02
2
4
4
=−∂∂+
∂∂+
∂∂
WkWW
RW
xx ξλ
ξξ
ωβα i+=
4.3.11. Flatter panelowy
2
1
00.750.5
W1
W2
0.25 ξξξξ
2
1
00.750.5
W1
W2
ξξξξ0.25
Płyta podparta swobodnie Płyta utwierdzona© F.A. Dul 2006

Brzegi utwierdzone
2.0
4.0
6.0
λλλλππππ4
3.52
8.0
Stateczno ść
6.52
Brzegi podparte przegubowe
4.3.11. Flatter panelowy
gαααα1.0 2.01.50.50.0
• Sztywne zamocowanie płyty znacznie (prawie dwukrotnie) podwyŜsza prędkość krytyczną flatteru.
• Flatter panelowy występuje tylko przy prędkościach naddźwiękowych.
• Flatter panelowy nie musi mieć charakteru niszczącego - mogą to być drgania o stałej amplitudzie (cykl graniczny).
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.3.12. BUFFETING
4.3. ZJAWISKA AEROELASTYCZNE DYNAMICZNE
© F.A. Dul 2006
4.3.12. BUFFETING

BuffetingBuffeting są to drgania rezonansowe elementów samolotu wzbudzane zawirowaniami przepływu.
Buffeting występuje wtedy, gdy częstość wirów pokrywa się z częstością drgań własnych elementu samolotu,
Przyczyny wystąpienia buffetingu:
sv ωω ~
4.3.12. Buffeting
• oderwanie przepływu przy przeciągnięciu,• oderwanie przepływu przez falę uderzeniową (M~1).
© F.A. Dul 2006

Najczęściej spotykane rodzaje buffetingu:
• buffeting skrzydeł,• buffeting usterzenia
4.3.12. Buffeting
Buffeting moŜe być zjawiskiem niszczącym, jeŜeli amplituda drgań jest duŜa.
Łagodny buffeting sygnalizujący przeciągnięcie jest zjawiskiem poŜądanym.
Buffeting usterzenia samolotu F-18 „Hornet”
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.3.13. FLATTER WIROWY
4.3. ZJAWISKA AEROELASTYCZNE DYNAMICZNE
© F.A. Dul 2006
4.3.13. FLATTER WIROWY

4.3.13. Flatter wirowy
...po wypadku spowodowanym flatterem
wirowym (1960)
Samolot Lockheed L-188 „Electra”
© F.A. Dul 2006

Flatter wirowy
Zasadnicze znaczenie dla powstania flatteru wirowego ma moment giroskopowy, oraz odkształcalność skrzydła i gondoli silnika.
Flatter wirowy jest wywołany periodycznymi siłami aerodynamicznymi oraz momentem giroskopowym generowanymi przez obracające się śmigło lub wirnik.
4.3.13. Flatter wirowy
© F.A. Dul 2006

Ruch obrotowy wirnika
Zakręt
Momentgiroskopowy
ΩΩΩΩ
4.3.13. Flatter wirowy
Ruch precesyjny gondoli wymusza skręcanie i zginanie skrzydła.
Zmiana płaszczyzny wirowania łopat śmigła (wywołana przez zakręt lub podmuch) powoduje powstanie momentu giroskopowego który zgina gondolę.
SprzęŜenie drgań gondoli i skrzydła prowadzi do powstania niestateczności ruchu. © F.A. Dul 2006
Ω×≈ IzG ωΩM

30
40
Niestateczno ść
ΩΩΩΩ
50
Stateczno ść
4.3.13. Flatter wirowy
Dopuszczalna prędkość kątowa śmigła szybko maleje ze wzrostem prędkości lotu.
Flatter wirowy ogranicza moŜliwość poprawy osiągów samolotów z przestawianym wirnikiem, takich jak Boeing V-22 „Osprey”
1000
U
200 300 400
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.4. AEROELASTYCZNOŚĆ ŚMIGŁOWCÓW
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.4.1. WPROWADZENIE
4.4. AEROELASTYCZNOŚĆ ŚMIGŁOWCÓW
© F.A. Dul 2006
4.4.1. WPROWADZENIE

• flatter klasyczny łopat wirnika,
Aeroelastyczno ść śmigłowców
4.4.1. Aeroelastyczno ść śmigłowców
Aerodynamika śmigłowców jest bardzo złoŜona ze względu na obracające się wirniki oraz niesymetrię opływu, nawet w locie prostoliniowym.
NajwaŜniejszymi zjawiskami aeroelastycznymi występującymi na śmigłowcach są:
Na śmigłowcach występują zarówno klasyczne zjawiska aeroelastyczne, jak i zjawiska specyficzne dla tych maszyn latających.
• flatter klasyczny łopat wirnika,• flatter oderwania, • rezonans naziemny i powietrzny.
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.4.2. FLATTER ODERWANIA
4.4. AEROELASTYCZNOŚĆ ŚMIGŁOWCÓW
© F.A. Dul 2006
4.4.2. FLATTER ODERWANIA

Flatter oderwania jest to nieliniowy flatter o jednym stopniu swobody.Flatter oderwania
4.4.2. Flatter oderwania
Przebieg statycznyCz(αααα)
Przyczyna flatteru oderwania -nieliniowa charakterystyka siły
• przy duŜych prędkościach lotu śmigłowca,
• w trakcie manewrów.
Flatter oderwania występuje najczęściej:
© F.A. Dul 2006
ααααααααkr
Przebieg statyczny
ααααCm(αααα) ααααkr
nieliniowa charakterystyka siły nośnej i momentu aerodynamicznego w funkcji kąta natarcia.

MA
UKαααα
MS
L
4.4.2. Flatter oderwania
Wyjaśnienie mechanizmu flatteru oderwania
W zakresie podkrytycznym siła nośna wywołuje dodatni moment aerodynamiczny, który zwiększa kąt natarcia skrzydła.
Oderwanie przepływu
UKαααα
MS
L MA
© F.A. Dul 2006
aerodynamiczny, który zwiększa kąt natarcia skrzydła.
W zakresie nadkrytycznym całkowity moment aerodynamiczny staje się ujemny, co powoduje zmniejszenie kąt natarcia.

U
ΨΨΨΨ = 90°°°°
ΨΨΨΨ =180°°°°
ΨΨΨΨ = 270°°°°
14°°°°
1°°°°
Łopata powracająca
Łopata nacierająca
αααα=0°°°°4°°°°
12°°°° 8°°°°
10°°°°
4°°°°
16°°°°
14°°°° 2°°°°
4.4.2. Flatter oderwania
ΨΨΨΨ = 0°°°°
Kierunek obrotów wirnika
4°°°°12°°°°
10°°°° 6°°°°
© F.A. Dul 2006
• Kąt natarcia na łopacie nacierającej zmienia się łagodnie. • Zmiany kąta na łopacie powracającej są dość szybkie.• Pojawia się cykl graniczny o ograniczonej amplitudzie.• Odczuwalnym efektem flatteru oderwania jest zwiększony poziom
drgań, wyraźnie wyczuwalny przez pilota.• Flatter oderwania nie jest na ogół zjawiskiem niszczącym.

AEROELASTYCZNOŚĆ
4.4.3. REZONANS NAZIEMNY
4.4. AEROELASTYCZNOŚĆ ŚMIGŁOWCÓW
© F.A. Dul 2006
4.4.3. REZONANS NAZIEMNY

Rezonans naziemny śmigłowca4.4.3. Rezonans naziemny śmigłowca
• Rezonans naziemny - jedno z groźniejszych zjawisk dynamicznych.
• Są to drgania o rosnącej amplitudzie prowadzące nawet do przewrócenia się śmigłowca.
• SprzęŜenie poprzecznych drgań łopat wirnika z drganiami kadłuba z udziałem spręŜystości podwozia.
• Niewielki udział sił aerodynamicznych.© F.A. Dul 2006

φφφφzF
ζζζζ1
ζζζζ2
ζζζζ
yF
xF
4.4.3. Rezonans naziemny śmigłowca
xF
ζζζζ3
ζζζζ4
θθθθzF
yF
Model wirnika i kadłuba
© F.A. Dul 2006

xByB
zB
rCM
ΨΨΨΨ1
zF , zH
φφφφ
xH
yH
e
h
yF
R
1/2 k
ΩΩΩΩ
4.4.3. Rezonans naziemny śmigłowca
Łopata 1-R
m BxF
θθθθ
1/2 kφφφφ
1/2 kφφφφ
1/2 kθθθθ1/2 kθθθθ
m F
Model kadłuba i głowicy
Model łopaty wirnika
© F.A. Dul 2006

Równania ruchu układu kadłub-głowica-wirnik
))2
)1(sin()
2
)1(cos(( 11
2 πψφπψθζζ −++−+=+ iimhrΩmerI BCMiBCMiB
&&&&&&
∑ =+−++Ω+Ω=+ 4
1 12
122 )
2
)1(cos())(()4(
i CMBBy
irehmhmI
πψςφ &&&
)1( π−i
- równanie drgań poprzecznych łopat ζζζζ
- równanie przechylania kadłuba φφφφ
4.4.3. Rezonans naziemny śmigłowca
)2
)1(sin()( 11
21
πψςς −+Ω−+ ihrm CMB &&
+−++Ω+Ω−=+ ∑ =
4
1 12
122 )
2
)1(sin())(()4(
i CMBBx
irehmhmI
πψςθ &&&
)2
)1(cos()( 11
21
πψςς −+Ω−+ ihrm CMB &&
- równanie pochylania kadłuba θθθθ
© F.A. Dul 2006

Parametry modelu mające wpływ na wystąpienie rezonansu naziemnego:
,4
222
BF mm +Ω
= ζζ
ωω)
- częstość znormalizowana drgań poprzecznych łopat
- znormalizowaną prędkość kątowa wirnika
- częstość drgań poprzecznych łopat
B
BCM
B I
mre
I
K+
Ω=
22 ζ
ζω
4.4.3. Rezonans naziemny śmigłowca
.4
4
BF
B
mm
m
+=µ
,4
22
BF mm +Ω=Ω
)
- znormalizowaną prędkość kątowa wirnika
- masa zredukowana śmigłowca
© F.A. Dul 2006

0))(2)(1( 48322222 =−Ω−+Ω−+ siss µωζ
)))
)( 221 ζω)
)+Ω= is
)( 222 ζω)
)−Ω= is
Równanie charakterystyczne
Pierwiastki równania charakterystycznego- drgania poprzeczne łopat:
- drgania kadłuba:
4.4.3. Rezonans naziemny śmigłowca
1.0
2.0
ωωωωζζζζ
Posta ć
PostaciełopatΩΩΩΩ + ωωωωζζζζ
is −=3
is =4
- drgania kadłuba:
© F.A. Dul 2006
2.0 4.03.01.00.0
-1.0
0
1.0
Posta ć kadłuba
ΩΩΩΩ
ΩΩΩΩ - ωωωωζζζζ
Posta ć kadłuba
ΩΩΩΩE
Częstości drgań kadłuba i łopat w funkcji
prędkości kątowej wirnika

ζω))
<Ω
ζω))
>Ω
1+=Ω ζω))
- rezonans naziemny nie wystąpi.
- rezonans naziemny moŜe wystąpić dla duŜej wartości masy zredukowanej µµµµ.
- rezonans naziemny moŜe wystąpić niezaleŜnie od wartości µµµµ.
Warunki wyst ąpienia rezonansu naziemnego
1~ζω) - typowa wartość zredukowanej częstości drgań poprzecznych łopat
4.4.3. Rezonans naziemny śmigłowca
drgań poprzecznych łopat
2=ΩCR
)
- wartość krytyczna zredukowanej prędkości kątowej wirnika
3~CRΩ)
- typowa wartość eksploatacyjna zredukowanej prędkości kątowej wirnika
© F.A. Dul 2006

0.4
0.6
0.8
µµµµ = 0.2
ΩΩΩΩ maleje
1ΩΩΩΩ
µµµµ = 0.2
µµµµ = 1.0
µµµµ = 1.0
stateczność
niestateczność
Rezonans naziemny – obszary niestateczno ści
4.4.3. Rezonans naziemny śmigłowca
0.5 1.00.750.250.0
0.2
ωωωωζζζζ
ΩΩΩΩ rośnie
φφφφ ≡≡≡≡ 0
stateczność
© F.A. Dul 2006

• Rezonans naziemny występuje wówczas, gdy częstość drgań poprzecznych łopat wirnika jest równa prędkości kątowej wirnika.
• Gdy masa zredukowana jest duŜa to rezonans moŜe wystąpić nawet przy prędkości kątowej wirnika dość znacznie róŜniącej się od częstości drgań łopat.
• Zwiększanie tłumienia ruchu kadłuba przy małych wartościach masy zredukowanej moŜe doprowadzić do rezonansu naziemnego.
• Zwiększanie tłumienia drgań poprzecznych łopat moŜe równieŜ doprowadzić do rezonansu naziemnego.
Rezonans naziemny śmigłowca4.4.3. Rezonans naziemny śmigłowca
doprowadzić do rezonansu naziemnego.• Całkowite wyeliminowanie moŜliwości wystąpienia rezonansu
naziemnego nie jest moŜliwe.
© F.A. Dul 2006

• Rezonans powietrzny śmigłowca polega na sprzęŜeniu drgań łopat wirnika : poprzecznych (“lag”) i pionowych (“flap”) oraz ruchów kadłuba.
• Brak jest oddziaływania spręŜystości i tłumienia podwozia.
• Większe znaczenie niŜ w przypadku rezonansu naziemnego mają siły aerodynamiczne, zwłaszcza tłumienie aerodynamiczne ruchów kadłuba.
• Niebezpieczne są zwłaszcza drgania związane z przechylaniem
Rezonans powietrzny śmigłowca4.4.3. Rezonans naziemny śmigłowca
• Niebezpieczne są zwłaszcza drgania związane z przechylaniem kadłuba.
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
4.5. METODY ZAPOBIEGANIA FLATTEROWI
© F.A. Dul 2006

Metody zapobiegania flatterowi
Metody bierne polegają na takim projektowaniu elementów samolotu, aby ich charakterystyki aeroelastyczne spełniały kryteria antyflatterowe.
Metody przeciwdziałania flatterowi dzielą się na bierne i czynne .
Metody czynne polegają ustatecznianiu konstrukcji niestatecznej (lub posiadającej zbyt mały zapas stateczności) poprzez sterowanie ruchem konstrukcji.
4.5. Metody zapobiegania flatterowi
© F.A. Dul 2006

Metody bierne• Zapewnienie odpowiedniej sztywności konstrukcji (konstrukcje
skorupowe, z wypełniaczami ulowymi, stosowanie materiałów kompozytowych).
• WywaŜanie masowe elementów samolotu (np. poprzez przednie zamocowanie silników).
• WywaŜenie masowe sterów.
• Usztywnienie układu sterowania.
4.5. Metody zapobiegania flatterowi
• Zwiększenie tłumienia w układzie sterowania.
• Eliminacja luzów w układzie sterowania.
© F.A. Dul 2006

Układ sterowania automatycznego
Mechanizm wykonawczy Układ pomiarowy
Ruch skrzydła
Pilot
Metody czynne
4.5. Metody zapobiegania flatterowi
Układ sterowania automatycznego koryguje wychylenia sterów w taki sposób, aby stłumić powstające drgania flatterowe.
© F.A. Dul 2006

AEROELASTYCZNOŚĆ4.6. ANALIZA AEROELASTYCZNA
W PRAKTYCE
© F.A. Dul 2006

AEROELASTYCZNOŚĆ4.6. ANALIZA AEROELASTYCZNA
W PRAKTYCE
4.6.1. FLATTER W PRZEPISACH LOTNICZYCH
© F.A. Dul 2006
4.6.1. FLATTER W PRZEPISACH LOTNICZYCH

Przepisy lotnicze formułują warunki dotyczące zjawisk aeroelastycznych które musi spełniać kaŜda konstrukcja lotnicza.
4.6.1. Flatter w przepisach lotniczych
JAR 22.629 Flutter
(a) The sailplane must be free from flutter, aerofoil divergence, and control reversal in eachconfiguration and at each appropriate speed up to at least VD. Sufficient damping must be availableat any appropriate speed so that aeroelastic vibration dies away rapidly.
(b) Compliance with sub-paragraph (a) must be shown by:(1) a ground vibration test which includes an analysis and an evaluation of the established vibration
Przykład wymagań flatterowych w przepisach lotniczych JAR dla szybowców
(1) a ground vibration test which includes an analysis and an evaluation of the established vibrationmodes and frequencies for the purpose of recognising combinations critical for flutter, either by:
(i) an analytical method, which will determine any critical speed in the range up to 1·2 VD, or(ii) any other approved method.
(2) systematic flight tests to induce flutter at speeds up to VDF. These tests must show that asuitable margin of damping is available and that there is no rapid reduction of damping as VDF isapproached.
(3) flight tests to show that when approaching VDF:(i) control effectiveness around all three axes is not decreasing in an unusually rapid manner,
and must have stops that will limit its range of travel to that allowing safe flight and landing.
(ii) no signs of approaching aerofoil divergence of wings, tailplane and fuselage result from thetrend of the static stabilities and trim conditions.
© F.A. Dul 2006

(MIL-A-8870C, 1993 ) Military Specification. The aircraft shall meet the following stability design requirements.
Airspeed marginThe equivalent airspeed (VE) margin of safety shall not be less than 15 percent at all points on the limit speed (VL/ML) envelope both at constant Mach number and separately at constant altitude for all configurations of the aircraft.
DampingThe total aerodynamic plus structural damping coefficient (g) shall not be less than 3 percent (g=0.03) for any critical flutter mode and for all altitudes and flight speeds from minimum cruising speed to VL/ML for all configurations of aircraft.
4.6.1. Flatter w przepisach lotniczych
© F.A. Dul 2006
The objective of the flight flutter qualification process was to demonstrate that the modified aircraft was free from flutter up to the dive speed VD. The qualification methodology consisted of two steps:
(1) extensive flutter analysis of the modified aircraft for different weights and CG configurations within the weight and CG envelope;
(2) flutter flight tests conducted based on the critical configurations determined by the flutter analysis.

FAR Part § 25.629: Aeroelastic stability requirement s(a) General . The aeroelastic stability evaluations required under this section
include flutter, divergence, control reversal and any undue loss of stability and control as a result of structural deformation. The aeroelastic evaluation must include whirl modes associated with any propeller or rotating device that contributes significant dynamic forces. Compliance with this section must be shown by analyses, wind tunnel tests, ground vibration tests, flight tests, or other means found necessary by the Administrator.
(b) Aeroelastic stability envelopes . The airplane must be designed to be free from aeroelastic instability for all configurations and design conditions within the aeroelastic stability envelopes as follows:
4.6.1. Flatter w przepisach lotniczych
the aeroelastic stability envelopes as follows:
(1) For normal conditions without failures, malfunctions, or adverse conditions, all combinations of altitudes and speeds encompassed by the VD/MD versus altitude envelope enlarged at all points by an increase of 15 percent in equivalent airspeed at both constant Mach number and constant altitude. In addition, a proper margin of stability must exist at all speeds up to VD/MD and, there must be no large and rapid reduction in stability as VD/MD is approached. The enlarged envelope may be limited to Mach 1.0 when MD is less than 1.0 at all design altitudes, and
© F.A. Dul 2006

FAR Part § 25.629: Aeroelastic stability requirement s(2) For the conditions described in §25.629(d) below, for all approved
altitudes, any airspeed up to the greater airspeed defined by;
(i) The VD/MD envelope determined by §25.335(b); or,
(ii) An altitude-airspeed envelope defined by a 15 percent increase in equivalent airspeed above VC at constant altitude, from sea level to the altitude of the intersection of 1.15 VC with the extension of the constant cruise Mach number line, MC, then a linear variation in equivalent airspeed to MC+0.05 at the altitude of the lowest VC/MC intersection; then, at higher altitudes, up to the maximum flight altitude, the boundary defined by a 0.05
4.6.1. Flatter w przepisach lotniczych
the maximum flight altitude, the boundary defined by a 0.05Mach increase in MC at constant altitude.
(c) Balance weights . If concentrated balance weights are used, their effectiveness and strength, including supporting structure, must be substantiated.
© F.A. Dul 2006

FAR Part § 25.629: Aeroelastic stability requirement s(d) Failures, malfunctions, and adverse conditions . The failures, malfunctions,
and adverse conditions which must be considered in showing compliance with this section are:
(1) Any critical fuel loading conditions, not shown to be extremely improbable, which may result from mismanagement of fuel.
(2) Any single failure in any flutter damper system.(3) For airplanes not approved for operation in icing conditions, the maximum
likely ice accumulation expected as a result of an inadvertent encounter.(4) Failure of any single element of the structure supporting any engine,
independently mounted propeller shaft, large auxiliary power unit, or large
4.6.1. Flatter w przepisach lotniczych
independently mounted propeller shaft, large auxiliary power unit, or large externally mounted aerodynamic body (such as an external fuel tank).
(5) For airplanes with engines that have propellers or large rotating devices capable of significant dynamic forces, any single failure of the engine structure that would reduce the rigidity of the rotational axis.
(6) The absence of aerodynamic or gyroscopic forces resulting from the most adverse combination of feathered propellers or other rotating devices capable of significant dynamic forces. In addition, the effect of a single feathered propeller or rotating device must be coupled with the failures of paragraphs (d)(4) and (d)(5) of this section.
(7) Any single propeller or rotating device capable of significant dynamic forces rotating at the highest likely overspeed.
© F.A. Dul 2006

FAR Part § 25.629: Aeroelastic stability requirement s4.6.1. Flatter w przepisach lotniczych
(8) Any damage or failure condition, required or selected for investigation by §25.571. The single structural failures described in paragraphs (d)(4) and (d)(5) of this section need not be considered in showing compliance with this section if;
(i) The structural element could not fail due to discrete source damage resulting from the conditions described in §25.571(e), and
(ii) A damage tolerance investigation in accordance with §25.571(b) shows that the maximum extent of damage assumed for the purpose of residual strength evaluation does not involve complete failure of the structural element.
© F.A. Dul 2006
failure of the structural element.
(9) Any damage, failure, or malfunction considered under §§25.631, 25.671, 25.672, and 25.1309.
(10) Any other combination of failures, malfunctions, or adverse conditions not shown to be extremely improbable.

FAR Part § 25.629: Aeroelastic stability requirement s(e) Flight flutter testing . Full scale flight flutter tests at speeds up to VDF/MDF
must be conducted for new type designs and for modifications to a type design unless the modifications have been shown to have an insignificant effect on the aeroelastic stability. These tests must demonstrate that the airplane has a proper margin of damping at all speeds up to VDF/MDF, and that there is no large and rapid reduction in damping as VDF/MDF, is approached. If a failure, malfunction, or adverse condition is simulated during flight test in showing compliance with paragraph (d) of this section, the maximum speed investigated need not exceed VFC/MFC if it is shown, by correlation of the flight test data with other test data or analyses, that the airplane is free from any aeroelastic instability at all speeds within the altitude-airspeed envelope
4.6.1. Flatter w przepisach lotniczych
aeroelastic instability at all speeds within the altitude-airspeed envelope described in paragraph (b)(2) of this section.
[Doc. No. 26007, 57 FR 28949, June 29, 1992]
© F.A. Dul 2006

Prędkości krytyczne poszczególnych zjawisk aeroelastycznych muszą być większe niŜ dopuszczalne prędkości eksploatacyjne konstrukcji lotniczej w róŜnych warunkach lotu,
4.6.1. Flatter w przepisach lotniczych
HFlatter steru
kierunku
),(),( MaHVMaHV CRD <
© F.A. Dul 2006
Ma
Flatter skrzydła
Zakres eksploatacyjny
samolotu
kierunku
Flatter lotek

AEROELASTYCZNOŚĆ4.6. ANALIZA AEROELASTYCZNA
W PRAKTYCE
4.6.2. OBLICZENIA FLATTEROWE W PRAKTYCE
© F.A. Dul 2006
4.6.2. OBLICZENIA FLATTEROWE W PRAKTYCE

• MSC.Nastran™,
• ANSYS,
• AESIM (NLR, Holandia),
• Boeing, Lockheed, Airbus, opracowały własne systemy obliczeniowe,
Do wyznaczania charakterystyk aeroelastycznych konstrukcji lotniczych słuŜą profesjonalne systemy CAD/CAM:
Analiza aeroelastyczna w praktyce4.6.2. Obliczenia flatterowe w praktyce
obliczeniowe,
• Specjalizowane moduły przeznaczone do obliczeń flatterowych w systemach wspomagania obliczeń naukowych, takich jak Matlab® czy MathCad.
© F.A. Dul 2006

MSC.Nastran™Początek - lata 60. XX w. - dla potrzeb programu “Apollo” - NASA Dalszy rozwój - firma McNeal/Schwendler• analiza aeroelastyczna całych samolotów• analiza drgań konstrukcji za pomocą Metody Elementów
Skończonych (FEM, FEA), • wyznaczanie postaci drgań flatterowych i prędkości krytycznych. • metody klasycznej analizy aeroelastycznej:
K, KE, PK, PKS, PKNL, PKNLS,
4.6.2. Obliczenia flatterowe w praktyce
• modułowa struktura systemu pozwala dobrać optymalnie modele konstrukcji i przepływu,
• moŜliwość wykorzystania wyników prób rezonansowych do zwiększenia dokładności i wiarygodności uzyskiwanych wyników,
• moŜliwość połączenia z systemami słuŜącymi do przetwarzania danych lub obróbki wyników (MSC.Patran™, MSC.FlightLoads™)
• moŜliwość wykorzystania wyników obliczeń do certyfikacji samolotu wg przepisów FAA (Federal Aviation Administration, USA) lub JAR (Joint Aviation Authorities, Europa).
© F.A. Dul 2006

4.6.2. Obliczenia flatterowe w praktyce
Moduły aerodynamiki w systemie MSC Nastran™
© F.A. Dul 2006

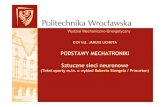
Model obliczeniowy szybowca SZD-56 Diana w systemie MSC Nastran
4.6.2. Obliczenia flatterowe w praktyce
w systemie MSC Nastran ( PZL-Mielec, mgr inŜ. W. Chajec )
© F.A. Dul 2006
Wyniki obliczeń szybowca SZD-56 Diana systemem MSC Nastran

• Analiza klasyczna jest uŜywana z powodzeniem przy projektowaniu i weryfikacji samolotów wszystkich typów (od konstrukcji ultralekkich i szybowców, poprzez samoloty cywilne, komunikacyjne, do samolotów wojskowych).
• Systemy obliczeniowe oparte na klasycznej analizie aeroelastycznej zaspokajają większość potrzeb przemysłu lotniczego (~90%)
• Zebrane doświadczenia praktyczne zapewniają wysoką wiarygodność uzyskiwanych wyników.
Analiza aeroelastyczna w praktyce - wnioski4.6.2. Obliczenia flatterowe w praktyce
uzyskiwanych wyników.
• Profesjonalne systemy obliczeniowe cechują się wysokim stopniem niezawodności.
• Analiza takich zjawisk, jak flatter transoniczny, manewry na duŜych kątach natarcia, aeroelastyczność śmigłowców, wymaga jednak uŜycia metod bardziej zaawansowanych.
• MoŜliwości takie daje jedynie analiza symulacyjna
© F.A. Dul 2006

AEROELASTYCZNOŚĆ4.6. ANALIZA AEROELASTYCZNA
W PRAKTYCE
4.6.3. PRÓBY FLATTEROWE
© F.A. Dul 2006
4.6.3. PRÓBY FLATTEROWE

4.6.3. Próby flatterowe
Cykl projektowania i badań aeroelastycznych konstrukcji lotniczej składa się z czterech faz:
• analizy drgań własnych, • badań rezonansowych naziemnych (GVT), • analizy aeroelastycznej,• prób flatterowych w locie.
Próby flatterowe w locie są ukoronowaniem całego cyklu budowy konstrukcji lotniczej i są konieczne dla zapewnienia bezpieczeństwa eksploatacji samolotu.
© F.A. Dul 2006
eksploatacji samolotu.
Próby flatterowe są najbardziej ryzykowną częścią badań, gdyŜ oprócz ryzyka zniszczenia konstrukcji występuje takŜe duŜe ryzyko powaŜnej katastrowy lotniczej.
Przykładem jest katastrowa samolotu I-22 „Iryda” w roku 1987, właśnie w trakcie prób flatterowych.
Ryzyko tych prób wynika z faktu, Ŝe w ich trakcie samolot musi lecieć z prędkością zbliŜoną do prędkości krytycznej flatteru, która wyznaczona jest tylko z pewnym przybliŜeniem.
W czasie prób flatterowych B-747 zbliŜa się do prędkości dźwięku.

4.6.3. Próby flatteroweRealizacja prób flatterowych
• turbulencja,• lotki,• skrzydełko,• wzbudnik
pirotechnicznyx(t)V
Rejestracja
Odbiornik
System obróbki danych
NadajnikWymuszenie drgań skrzydła:
δδδδ(V) -dekrement
drgań
)(tx
t
teδx
© F.A. Dul 2006
pirotechnicznyx(t)V
)(Vδ
krV
V
Ekstrapolacja

AEROELASTYCZNOŚĆ4.7. SYMULACYJNA ANALIZA
AEROELASTYCZNA
© F.A. Dul 2006

Symulacyjna analiza aeroelastyczna
tiehth ω0)( =
Analiza klasyczna - badanie załoŜonego ruchu harmonicznego
Analiza symulacyjna - badanie stateczności ruchu konstrukcji poprzez całkowanie równań konstrukcji i przepływu.
W analizie symulacyjnej nie zakłada się postaci ruchu - umoŜliwia to analizę dowolnych zjawisk aeroelastycznych
4.7. Symulacyjna analiza aeroelastyczna
Pełna analogia analizy symulacyjnej do badań flatterowych w locie.
Analiza symulacyjna, w przeciwieństwie do badań w locie, jest całkowicie bezpieczna.
Analiza symulacyjna jest kosztowna - wymaga wielkiej mocy obliczeniowej komputerów.
© F.A. Dul 2006

ΩΩΩΩ(t)
ΓΓΓΓe(x)
x(t)
u(t)
f(u)
ślad
ΓΓΓΓ∞∞∞∞
U
4.7. Symulacyjna analiza aeroelastyczna
)(),( ufxxkxM =+ &&&
0uGu =+ )(div&
)(xΩ=Ω )(xsΓ∪Γ=Γ ∞
Równanie ruchu konstrukcji
Równanie opływu
Obszar przepływu i brzeg
© F.A. Dul 2006

Idea analizy symulacyjnej• Dla załoŜonej prędkości przepływu U całkuje się równania ruchu
przepływu i konstrukcji.
• Wyznacza się w ten sposób ruch konstrukcji x(t,U).
• JeŜeli amplituda ruchu x(t,U) maleje z czasem, to prędkość U jest mniejsza od prędkości krytycznej Ukr,
4.7. Symulacyjna analiza aeroelastyczna
• JeŜeli amplituda ruchu x(t,U) rośnie z czasem, to prędkość U jest większa od prędkości krytycznej Ukr.
• Powtórzenie obliczeń dla kilku wartości prędkości przepływu Upozwala wyznaczyć prędkość krytyczną Ukr z wymaganą dokładnością.
© F.A. Dul 2006

-2.50
0.00
2.50
5.00
7.50
10.00
Wsp
ółcz
ynni
k w
zros
tu w
ykła
dnic
zego
Aproksymacja wielomianem Czebyszewa
Aproksymacja splajnem
Vkr = 43.75 m/s
0.10
Ene
rgia
ruch
u ob
iekt
u [J
]
V = 50.0 m/s, λ = +2.10
V = 44.0 m/s, λ = +0.21
V = 40.8 m/s, λ = -1.07
V = 46.0 m/s λ = +0.94
Wyniki analizy symulacyjnej
4.7. Symulacyjna analiza aeroelastyczna
0.00 20.00 40.00 60.00
Prędko ść [m/s]
-5.00
-2.50
Vkr = 43.48 m/s
Vkr = 43.75 m/s
0.00 0.10 0.20 0.30 0.40 0.50
Czas symulacji [s]
V = 40.8 m/s, λ = -1.07
Energia ruchu skrzydław funkcji czasu Wykres V-g dla skrzydła
© F.A. Dul 2006

Cechy symulacyjnej analizy aeroelastycznej
• Największa zaleta podejścia symulacyjnego jest jej ogólność – moŜna w taki sposób badać praktycznie kaŜde zjawisko aeroelastyczne.
• Modele konstrukcji moŜna zbudować przy uŜyciu specjalizowanych pakietów oprogramowania słuŜących do analizy dynamiki konstrukcji (NASTRAN, ANSYS, CATIA)
• Model przepływu moŜe być efektywnie całkowany za pomocą oprogramowania CFD (Computational Fluid Dynamics)
4.7. Symulacyjna analiza aeroelastyczna
• Wadą podejścia symulacyjnego jest bardzo wysoki koszt obliczeń -wymiar modelu przepływu moŜe być bardzo duŜy, n ~ 107.
© F.A. Dul 2006

Redukcja kosztu analizy symulacyjnejModel modalny konstrukcji (n = 1-10)
)(2 uFqωq =+&&
Model potencjalny przepływu (n ~ 104 )
ϕ∇+= Uu ),,,( tzyxϕ - potencjał prędkości zaburzeń
02 =∇ ϕ- równanie Laplace’a
4.7. Symulacyjna analiza aeroelastyczna
0=∇ ϕ
0|/ )( =∂∂ Γ xsnϕ 0| =
∞Γϕ
),( γµpp = )(uF
- warunki brzegowe
- ciśnienie wywierane na konstrukcję
dipole ),( txµ ),( txγ (spełniają równanie i warunki brzegowe)i wiry
- metody doublet lattice i vortex lattice :
© F.A. Dul 2006

Pierwsze zastosowanie - Dowell (1960) - badanie nieliniowego flatteru panelowego.
Ograniczone moŜliwości obliczeniowe komputerów hamowały rozwój podejścia symulacyjnego aŜ do lat 80. XX wieku.
Metody klasyczne osiągnęły taki stopień rozwoju, Ŝe prawie całkowicie zaspokajają potrzeby praktyki (~90%).
Szybki rozwój metod symulacyjnych rozpoczął się pod koniec lat 70. XX wieku, po pojawieniu się superkomputerów:
4.7. Symulacyjna analiza aeroelastyczna
XX wieku, po pojawieniu się superkomputerów:
• flatter transoniczny „buzz” (Bennet, 1983), • flatter całych samolotów (Guruswamy, 1992),• zjawiska aeroelastyczne z udziałem silnych fal uderzeniowych i
warstwy przyściennej.
Analiza symulacyjna nie zastąpi analizy klasycznej - stanowi jednak jej uzupełnienie.
© F.A. Dul 2006

AEROELASTYCZNOŚĆ
PODSUMOWANIE
© F.A. Dul 2006

Piętnaście najwa Ŝniejszych faktów aeroelastyczno ści1. Zjawiska aeroelastyczne pojawiają się przy oddziaływaniu sił aerodynamicznych
na konstrukcję odkształcalną.2. Prędkość krytyczna jest to najmniejsza prędkość lotu przy której zjawisko
aeroelastyczne moŜe wystąpić.3. Zjawiska aeroelastyczne statyczne wywołują siły aerodynamiczne i siły
spręŜystości, zaś zjawiska aeroelastyczne dynamiczne - takŜe siły bezwładności.4. Zjawiska aeroelastyczne statyczne to dywergencja i rewers, zaś zjawiska
aeroelastyczne dynamiczne to róŜne rodzaje flatteru i buffeting.5. Dywergencja polega na niszczącym skręceniu skrzydła pod wpływem momentu
aerodynamicznego. 6. Rewers lotek to odwrotne ich działanie spowodowane skręceniem skrzydła.7. Flatter są to drgania samowzbudne (a nie rezonans!).
© F.A. Dul 2006
7. Flatter są to drgania samowzbudne (a nie rezonans!).8. Rodzaje flatterów: giętno-skrętny skrzydeł, powierzchni sterowych, kadłuba
i usterzeń, transoniczny lotkowy („buzz”), oderwania, panelowy.9. Flatter giętno-skrętny powierzchni nośnych polega na sprzęŜeniu drgań giętnych
oraz skrętnych i jest najniebezpieczniejszym typem flatteru.10. Flatter powierzchni sterowych są to drgania samowzbudne steru wraz
z odkształcalnym układem sterowania wywołane siłami aerodynamicznymi. 11. Przeciwdziałać flatterowi moŜna poprzez na usztywnieniu konstrukcji, wywaŜenie
antyflatterowe lub czynne tłumienie flatteru.12. WywaŜenie antyflatterowe polega na przesunięciu środka masy przed środek
skręcenia skrzydła lub oś obrotu steru (lotki). 13. Flatter panelowy to drgania samowzbudne poszycia w locie naddźwiękowym.14. Buffeting to drgania rezonansowe konstrukcji wywołane zawirowaniami przepływu.15. Przepisy lotnicze formułują wymagania antyflatterowe dla konstrukcji lotniczych.