Elektroniczna regulacja poziomu (ECAS) dla...
56
Elektroniczna regulacja poziomu (ECAS) dla autobusów z pneumatycznym układem zawieszenia Funkcje systemu Konfiguracja systemu Części składowe Koncepcja bezpieczeństwa Diagnoza Kod migowy Koncepcja serwisu Schematy połączeń Wydanie 1997 1. zmienione wydanie: Zmiany są oznaczone na marginesach poszczególnych stron za pomocą ramki. Ó Copyright WABCO 1997 WABCO Hamulce dla pojazdów Część przedsiębiorstwa WABCO Standard GmbH Zastrzega się prawo do wprowadzania zmian
Transcript of Elektroniczna regulacja poziomu (ECAS) dla...
1�����
Elektroniczna regulacja poziomu (ECAS)dla autobusów z pneumatycznymukładem zawieszenia
Funkcje systemuKonfiguracja systemuCzęści składoweKoncepcja bezpieczeństwaDiagnozaKod migowyKoncepcja serwisuSchematy połączeń
Wydanie 1997
1. zmienione wydanie:Zmiany są oznaczone na marginesach poszczególnych stronza pomocą ramki.
� Copyright WABCO 1997
WABCO Hamulce dla pojazdów
Część przedsiębiorstwaWABCO Standard GmbH
Zastrzega się prawo do wprowadzania zmian
2 �����
Spis treści
Rozdział Temat Strona
1 Wprowadzenie 3Funkcje systemu 4Przepisy ustawowe 5Konfiguracja systemu 6
2 Części składoweElektroniczny układ sterowniczy 7Zawory elektromagnetyczne 8Czujnik położenia 11Czujnik ciśnienia 12
3 Koncepcja bezpieczeństwa 13
4 Diagnoza 16
5 Kod migowy 22
6 Kalibracja 25
7 Algorytm regulacji 28
8 Objaśnienie parametrówWykaz parametrów 31Opis parametrów 35Wykaz parametrów dla ECU 446 055 055 0 45
9 Serwis 53
Schemat połączeńAutobus solo 54Autobus przegubowy 55
ECAS
3�����
Wprowadzenie ECAS 1Wprowadzenie
Angielskie oznaczenie ECAS oznacza
Electronically ElektronicznyControlled RegulowanyAir PowietrzeSuspension Zawieszenie
ECAS jest elektronicznie regulowanym pneumatycznymukładem zawieszenia dla pojazdów, w których systemiewystępuje duża liczba różnych funkcji.
Zawieszenie pneumatyczne zostało zastosowane już odpołowy lat dziewięćdziesiątych w samochodach,a przede wszystkim w autobusach. Rozpowszechniło sięono zwłaszcza w autobusach, w przypadku samo-chodów ciężarowych i przyczep jego zastosowaniewciąż wzrasta. Powody stosowania zawieszenia pneu-matycznego, zamiast mechanicznego (stalowychsprężyn) są następujące:
– zwiększenie komfortu jazdy, dzięki mniejszym ugię-ciom sprężyn i niższej częstotliwości własnej;
– stała wysokość pojazdu, niezależnie od obciążenia;
– dokładne wysterowanie hamulców w funkcji ob-ciążenia przez zastosowanie ciśnienia w miechupowietrznym do sterowania regulatorem siły hamo-wania;
– funkcja kneelingu (opuszczania jednego boku po-jazdu w celu ułatwienia wsiadania i wysiadania);
– ochrona powierzchni jezdni.
Po stosowanym początkowo sterowaniu z całkowiciemechanicznie pracującymi zaworami zawieszenia pneu-matycznego opracowano już wkrótce elektromechanicz-ny układ regulacji. Tym samym zwiększono komfortobsługi i ułatwione zostały procesy podnoszeniai opuszczania.
Nowoczesnym rozwiązaniem, idącym w tym kierunku,jest ECAS. Przez zastosowanie elektronicznych jedno-stek sterowniczych można było znacznie ulepszyć trady-cyjny system. Dopiero on umożliwił wprowadzenie wielufunkcji, np.
– Zmniejszenie zużycia powietrza – podczas jazdy nienastępuje zużycie powietrza. Przy zastosowaniuECAS stwierdzono oszczędność powietrza wyno-szącą ok. 25% w porównaniu z konwencjonalnymipneumatycznymi układami zawieszenia w autobusieniskopodłogowym, obsługującym regularną liniękomunikacyjną.
– Duża prędkość wszystkich procesów regulacji, dziękidużym przekrojom zaworów (średnica nominalna 7na każdy miech powietrzny).
– Szczególnie niewielki nakład na wykonanie instalacji.Od każdego bloku zaworów elektromagnetycznychpotrzebny jest jedynie jeden przewód powietrzny dokażdego miecha oraz jeden przewód do zasobnika.
– Funkcje podnoszenia/opuszczania i kneelinguodpowiednio do wymagań przepisów.
– Duża elastyczność systemu przy różnych rodzajachkneelingu.
– Rozbudowana koncepcja bezpieczeństwa, pamięćusterek i możliwość diagnostyki.
W porównaniu z mechanicznie sterowanym zawiesze-niem pneumatycznym, przy którym miejsce mierzącepoziom przejmuje również sterowanie zawieszeniem,w przypadku ECAS regulacja jest przejęta przez układelektroniczny, który – na podstawie wartości pomia-rowych uzyskanych z czujników – wysterowuje zawie-szenie pneumatyczne za pośrednictwem zaworówelektromagnetycznych.
Oprócz regulacji normalnego poziomu układ elektronicz-ny steruje również pozostałymi funkcjami w połączeniuz łącznikami obsługiwanymi przez kierowcę, które przykonwencjonalnym sterowaniu zawieszeniem pneumaty-
314
2
Solln
ivea
u
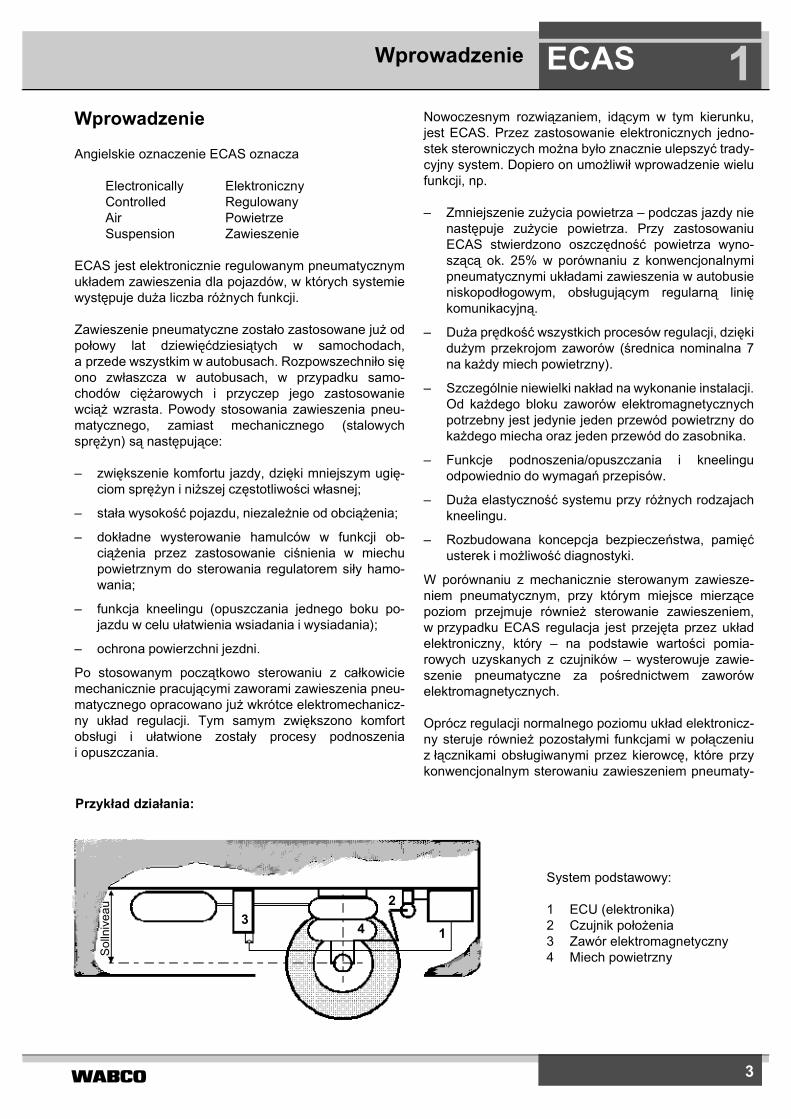
Przykład działania:
System podstawowy:
1 ECU (elektronika)2 Czujnik położenia3 Zawór elektromagnetyczny4 Miech powietrzny
4 �����
Wprowadzenie1cznym mogły być zrealizowane tylko przez zastosowaniedużej liczby dodatkowych zaworów.
ECAS, o różnym stopniu rozbudowy, może być stosowa-ny w różnych typach autobusów.
ECAS pracuje tylko przy włączonym zapłonie; na życze-nie mogą być również wykonywane czasowo ograniczo-ne funkcje przy wyłączonym zapłonie.
Funkcje systemu
Poniżej zostaną objaśnione możliwości, które stwarzaECAS. Trzeba jednak wziąć pod uwagę, że nie w każ-dym systemie muszą być zrealizowane wszystkie temożliwości. Konfiguracja systemu, a zwłaszcza dobórwszystkich parametrów zależy od producenta pojazdui nie może być w żadnym przypadku zmieniony bez jegozgody.
Poniżej opisane są funkcje ECAS – ECU 446 055 05.0.
Regulacja poziomu zadanegoW tym przypadku chodzi o podstawową funkcję ECAS.Przez ciągłe porównywanie wartości rzeczywistych, dos-tarczanych przez czujniki położenia, z wartościami zada-nymi, wprowadzonymi do pamięci ECU, układ ECAS jestwciąż informowany o poziomie pojazdu. W przypadkuwystąpienia odchylenia wykraczającego poza zakres to-lerancji następuje wysterowanie zaworów elektromagne-tycznych i zrównanie poziomu rzeczywistego z pozio-mem zadanym przez doprowadzenia albo odprowadze-nie powietrza z miecha powietrznego.
W odróżnieniu od konwencjonalnych układów zawiesze-nia pneumatycznego regulacji podlega nie tylko normal-ny poziom pojazdu, ale także każdy inny, wstępniewybrany poziom. Oznacza to, że niezależnie od liczbywsiadających i wysiadających pasażerów, zachowanyzostanie każdy nastawiony poziom.
Przy większych różnicach poziomu następuje impulsowezałączanie zaworów elektromagnetycznych przy zbliża-niu się do poziomu zadanego, w zależności od prędkościi odległości od poziomu zadanego, aby uniknąć przere-gulowania.
Wszystkie procesy regulacyjne mogą zachodzić równo-legle na obu osiach w granicach tolerancji (przednia i tyl-na oś jednocześnie).
Poziom normalny I/IIPod pojęciem poziomu normalnego I rozumie się poziom,który został ustalony przez producenta pojazdu dla nor-
malnej eksploatacji. Poziom normalny określa komfortzawieszenia, bezpieczeństwo jazdy i wysokość kon-strukcyjną, która musi odpowiadać granicom określonymw przepisach.
Pod pojęciem poziomu normalnego II rozumie się poziomodbiegający od standardowego poziomu normalnego,odpowiadający szczególnemu stanowi pojazdu. Wyso-kość poziomu normalnego II jest zdefiniowana na stałeprzez wartość nastawczą (parametr) w układzie elek-tronicznym. Za pomocą łącznika można dokonywaćwyboru między poziomem normalnym I i II.
Ze względów bezpieczeństwa, poziom normalny możebyć wyregulowany automatycznie, gdy pojazd przekro-czy graniczną prędkość (np. 20 km/h); po przekroczeniuw dół granicy najniższej prędkości (np. 10 km/h) nas-tępuje ponownie wyregulowanie poprzedniego poziomu.
Ręczna zmiana poziomu za pomocą przełącznikaW określonych przypadkach może być konieczne na-stawienie dowolnego poziomu odbiegającego od pozio-mów normalnych I/II. Do podnoszenia i opuszczaniamogą być używane w tym celu przyciski. Jeżeli zostanąone uruchomione, wówczas pojazd zostaje podnoszonyalbo opuszczany na osi/osiach wybranej/wybranych zapomocą łącznika preselekcyjnego.
Ograniczenie wysokościZmiana wysokości zostaje automatycznie zakończonaprzez układ elektroniczny, gdy zostały osiągnięte zapro-gramowane (wykalibrowane) wartości dla górnego i dol-nego położenia krańcowego.
KneelingKneeling jest specjalną funkcją dla autobusów. Przepisydla systemów kneelingu zostały ustalone w paragrafach30 i 35d przepisów o dopuszczeniu osób i pojazdów doruchu po drogach publicznych. Pod pojęciem kneelingurozumie się obniżanie autobusu w celu ułatwienia pa-sażerom wsiadania i wysiadania. Zależnie od doboruparametrów układu elektronicznego może się to dokony-wać po jednej stronie, na jednym kole albo na osi z czuj-nikiem położenia (z reguły przednia oś). ECAS oferujemiędzy innymi możliwość uwzględniania położenia drzwii zapewnienia opuszczania za pomocą listwy kontakto-wej, znajdującej się pod wejściem, które jest nadzorow-ane przez ECAS. Jeżeli listwa kontaktowa zadziała pod-czas procesu kneelingu, wówczas autobus powraca donormalnego poziomu.
W zależności od połączeń elektronicznych i doboru para-metrów układu elektronicznego możliwe są różne rodza-je uruchamiania funkcji kneelingu.
ECAS
5�����
Wprowadzenie ECAS 1Nadzorowanie ciśnienie w zbiornikuKneeling jest możliwy tylko w określonych warunkach.Jednym z nich jest dostateczne ciśnienie w zasobniku,aby umożliwić ponowne podniesienie w pełni załadowa-nego pojazdu do poziomu normalnego. Jeżeli ciśnieniew zasobniku opadło poniżej wartości nadzorowanejprzez wyłącznik ciśnieniowy, wówczas ECAS nie pozwolina włączenie kneelingu.
Przepisy ustawowe
Przepisy dla ECAS w autobusach§30 StVZO (przepisy o dopuszczeniu osób i pojazdów do ruchu po drogach publicznych) w połączeniu z §35d StVZOWytyczne dla stosowania w autobusach środków ułatwiających wsiadanie, napędzanych siłą zewnętrzną (wyciąg)
1. Zakres zastosowaniaWytyczne te znajdują zastosowanie dla autobusówwyposażonych w środki pomocnicze ułatwiające wsiada-nie, napędzane siłą zewnętrzną.
2. Określenie pojęć2.2. System kneelinguSystem kneelingu, w rozumieniu niniejszych wytycznych,jest urządzeniem do podnoszenia i opuszczania nad-wozia autobusów.
3. Wymagania3.2. System kneelingu3.2.1. UruchamianieW celu włączenia systemu kneelingu konieczne jest do-datkowe, zamykane urządzenie załączające.
3.2.2. Rodzaje uruchamianiaMusi istnieć możliwość ręcznego albo automatycznegosterowania podnoszeniem i opuszczaniem nadwozia po-jazdu.
Ręczne urządzenia uruchamiające
Ręczne urządzenie uruchamiające proces opuszczaniamusi być skonstruowane w taki sposób, aby – w przypad-ku zwolnienia podczas opuszczania – nastąpił samo-czynny powrót do położenia zerowego. Proces opusz-czania musi zostać przy tym natychmiast zatrzymanyi powinno nastąpić przejście do procesu podnoszenia.
Ponowny proces opuszczania może być wykonanyjedynie z normalnego położenia nadwozia pojazdu(położenie podczas jazdy).
Automatyczne urządzenie sterujące
Przy automatycznym urządzeniu sterującym musi istniećmożliwość zatrzymania procesu opuszczania przez kie-rowcę, za pomocą wyłącznika awaryjnego znajdującegosię w jego bezpośrednim zasięgu, i musi istnieć możli-wość przełączenia na podnoszenie.
Ponowne uruchomienie procesu opuszczania musi byćmożliwe tylko z normalnego położenia nadwozia pojazdu(położenie podczas jazdy).
3.2.3. Opuszczanie nadwoziaProces opuszczania może być włączony tylko przy zam-kniętych drzwiach. Może to nastąpić tylko przy prędkościjazdy poniżej 5 km/h.
Proces opuszczania musi być w znacznej części (co naj-mniej 80% drogi) zakończony, zanim zostaną całkowicieotwarte drzwi dla pasażerów.
Ważne jest, że autobus w stanie opuszczonym nie możejechać.
3.2.4. Podnoszenie nadwoziaProces podnoszenia nie może się rozpocząć dopóty,dopóki nie są jeszcze całkowicie otwarte jedne z drzwidla pasażerów. Jeżeli zadziała układ nawrotny w jakich-kolwiek drzwiach, wówczas proces podnoszenia powi-nien zostać przerwany.
6 �����
WprowadzenieECAS1Konfiguracja systemu
ECAS posiada budowę modułową, dzięki czemu możebyć stosowany w różnych rodzajach pojazdów. Dobórkoniecznych części składowych systemu zależy odwymagań stawianych systemowi.
W najprostszym wykonaniu dla autobusów wyposaża sięw układ zawieszenia pneumatycznego tylko jedną ośi wysokość nadwozia jest nadzorowana przez dwa czuj-niki położenia. W ten sposób wyposaża się np. końcoweczłony autobusów przegubowych.
Można przy tym łączyć ze sobą miechy nośne osi po-dwójnej.
Jeżeli jednak również przy nierównym obciążeniu bocz-nym należy utrzymywać nadwozie równolegle do osi,wówczas trzeba umieścić czujniki położenia po obu stro-nach i sterować miechami nośnymi tej osi albo osi po-dwójnej oddzielnie dla każdego boku, za pomocą róż-nych zaworów elektromagnetycznych.
Pojazd, posiadający całkowity, pneumatyczny układ za-wieszenia, jest wyposażany w trzy czujniki położenia.Przednia oś otrzymuje przy tym np. jeden czujnik, a tylnaoś dwa czujniki położenia.
Zastosowanie czterech czujników w pojeździe jest niedo-puszczalne, gdyż wskutek tego pozostaje statyczneprzewymiarowanie (układ regulacji 3-punktowej).
Oba miechy osi z tylko jednym czujnikiem położenia sąpołączone ze sobą za pośrednictwem dławika, abymogło następować wyrównanie ciśnienia. Podczas jazdyna zakręcie dławik ten zapobiega jednak szybkiemuwyrównaniu ciśnień. Tym samym zapobiega się odpo-wietrzeniu miecha znajdującego się po zewnętrznej stro-nie zakrętu, a więc zmniejsza się pochylenie pojazduw kierunku przeciwnym do kierunku zakrętu.
W przypadku autobusu przegubowego wyposaża się ośtylnego członu w dwa dalsze czujniki położenia i we włas-ny, elektroniczny układ sterowniczy.
Zestawienie konfiguracji systemu na podstawie sche-matów połączeń i numerów części, znajduje sięw załączniku.
Przyłącza kontrolneMiechy nośne powinny posiadać przyłącza kontrolne.
Dzięki temu zapewnia się możliwość pomiaru ciśnieniasterowniczego ALB podczas badań instalacji hamul-cowej.
Poza tym tego rodzaju przyłącza kontrolne stanowiąawaryjny środek pomocniczy dla napełniania miechównośnych, w przypadku gdy w pneumatycznym systemiezawieszenia występuje usterka. Przy użyciu węża dopompowania opon można wówczas zapewnić, że w pra-wie każdym przypadku pojazd będzie mógł dojechać dowarsztatu.
Zaświecenie się lampki sygnalizacyjnej informuje, że:
– poziom nie odpowiada aktualnemu poziomowi nor-malnemu;
– odbywa się test lampek (po włączeniu zapłonu).
Rozpoznane usterki powodują różne reakcje, zależnieod rodzaju usterki:
– zaświecenie się lampki sygnalizacyjnej w przypadkudrobnych usterek;
– zaświecenie się lampki sygnalizacyjnej przy nie-dostatecznym zasilaniu napięciem (przy napięciachod 5 do 18V);
– zaświecenie się lampki sygnalizacyjnej i przejściowewyłączenie systemu przy usterkach polegających naniezgodności z zadanymi parametrami;
– miganie lampki sygnalizacyjnej i wyłączenie systemuprzy poważnych usterkach i podczas diagnostyki.
7�����
Części składowe ECAS 2Opis części składowych
Elektroniczny układ sterowniczy (ECU)
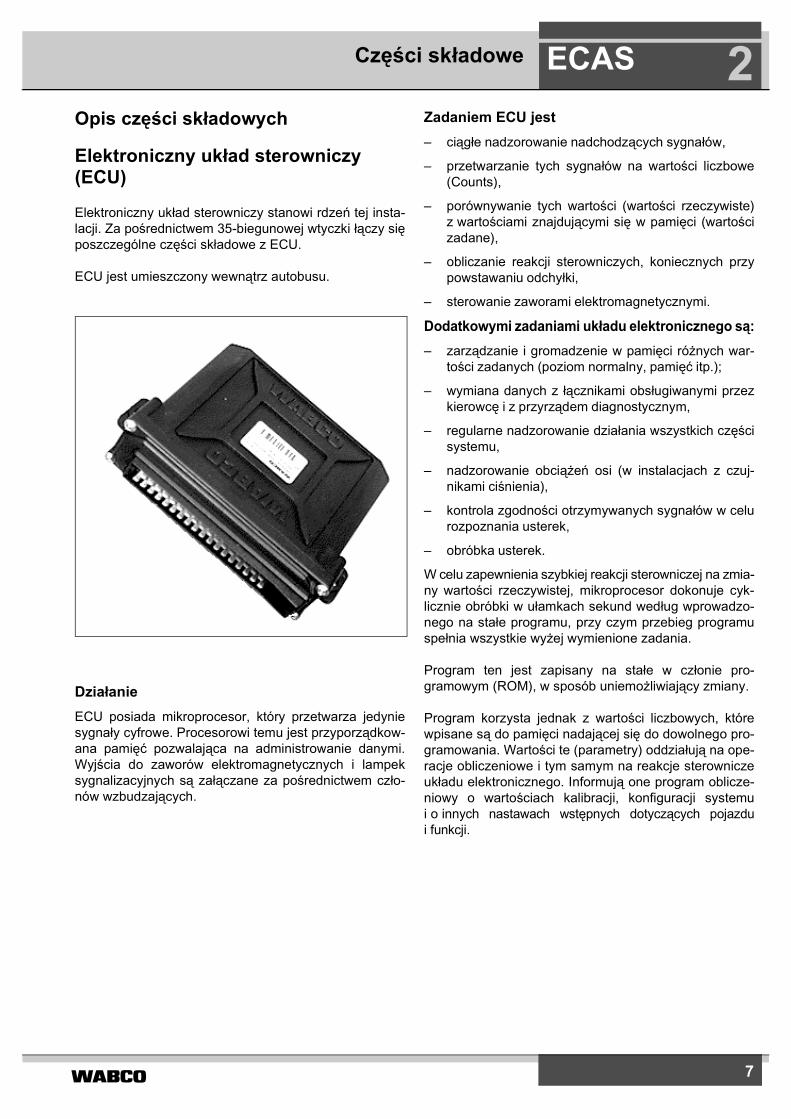
Elektroniczny układ sterowniczy stanowi rdzeń tej insta-lacji. Za pośrednictwem 35-biegunowej wtyczki łączy sięposzczególne części składowe z ECU.
ECU jest umieszczony wewnątrz autobusu.
DziałanieECU posiada mikroprocesor, który przetwarza jedyniesygnały cyfrowe. Procesorowi temu jest przyporządkow-ana pamięć pozwalająca na administrowanie danymi.Wyjścia do zaworów elektromagnetycznych i lampeksygnalizacyjnych są załączane za pośrednictwem czło-nów wzbudzających.
Zadaniem ECU jest– ciągłe nadzorowanie nadchodzących sygnałów,
– przetwarzanie tych sygnałów na wartości liczbowe(Counts),
– porównywanie tych wartości (wartości rzeczywiste)z wartościami znajdującymi się w pamięci (wartościzadane),
– obliczanie reakcji sterowniczych, koniecznych przypowstawaniu odchyłki,
– sterowanie zaworami elektromagnetycznymi.
Dodatkowymi zadaniami układu elektronicznego są:– zarządzanie i gromadzenie w pamięci różnych war-
tości zadanych (poziom normalny, pamięć itp.);
– wymiana danych z łącznikami obsługiwanymi przezkierowcę i z przyrządem diagnostycznym,
– regularne nadzorowanie działania wszystkich częścisystemu,
– nadzorowanie obciążeń osi (w instalacjach z czuj-nikami ciśnienia),
– kontrola zgodności otrzymywanych sygnałów w celurozpoznania usterek,
– obróbka usterek.
W celu zapewnienia szybkiej reakcji sterowniczej na zmia-ny wartości rzeczywistej, mikroprocesor dokonuje cyk-licznie obróbki w ułamkach sekund według wprowadzo-nego na stałe programu, przy czym przebieg programuspełnia wszystkie wyżej wymienione zadania.
Program ten jest zapisany na stałe w członie pro-gramowym (ROM), w sposób uniemożliwiający zmiany.
Program korzysta jednak z wartości liczbowych, którewpisane są do pamięci nadającej się do dowolnego pro-gramowania. Wartości te (parametry) oddziałują na ope-racje obliczeniowe i tym samym na reakcje sterowniczeukładu elektronicznego. Informują one program oblicze-niowy o wartościach kalibracji, konfiguracji systemui o innych nastawach wstępnych dotyczących pojazdui funkcji.
8 �����
Części składoweECAS2Zawory elektromagnetyczne
Dla systemu ECAS opracowano specjalne bloki zaworówelektromagnetycznych. Przez połączenie kilku zaworóww zwarty blok uzyskano niewielką objętość i mały nakładpracy na podłączanie.
Zawory elektromagnetyczne, wysterowywane przezukład elektroniczny jako człon nastawczy, przetwarzająnapięcie w proces napowietrzania albo odpowietrzania,tzn. zwiększają, zmniejszają albo utrzymują objętośćpowietrza w miechach powietrznych.
W celu osiągnięcia dużej wydajności powietrza stosujesię zawory wstępnie wysterowane. Elektromagnesyzałączają najpierw zawory o mniejszej średnicy nominal-nej, z których następuje doprowadzenie powietrza ste-rowniczego na powierzchnię tłoków właściwych zaworówzałączających (średnica nominalna 10 lub 7).
Zawory elektromagnetyczne są zbudowane w systemiekonstrukcji zespołowych: zależnie od zastosowaniawyposaża się ten sam korpus w różne części zaworui elektromagnesy.
W autobusie solo jedna oś jest wyposażona z reguływ dwa czujniki położenia, a druga oś w jeden czujnik. Dlarozróżnienia mówi się o osi z jednym albo z dwoma czuj-nikami położenia, w skrócie 1WSA i 2WSA, gdyż nie mażadnego wiążącego przyporządkowania do osi przedniejalbo tylnej.
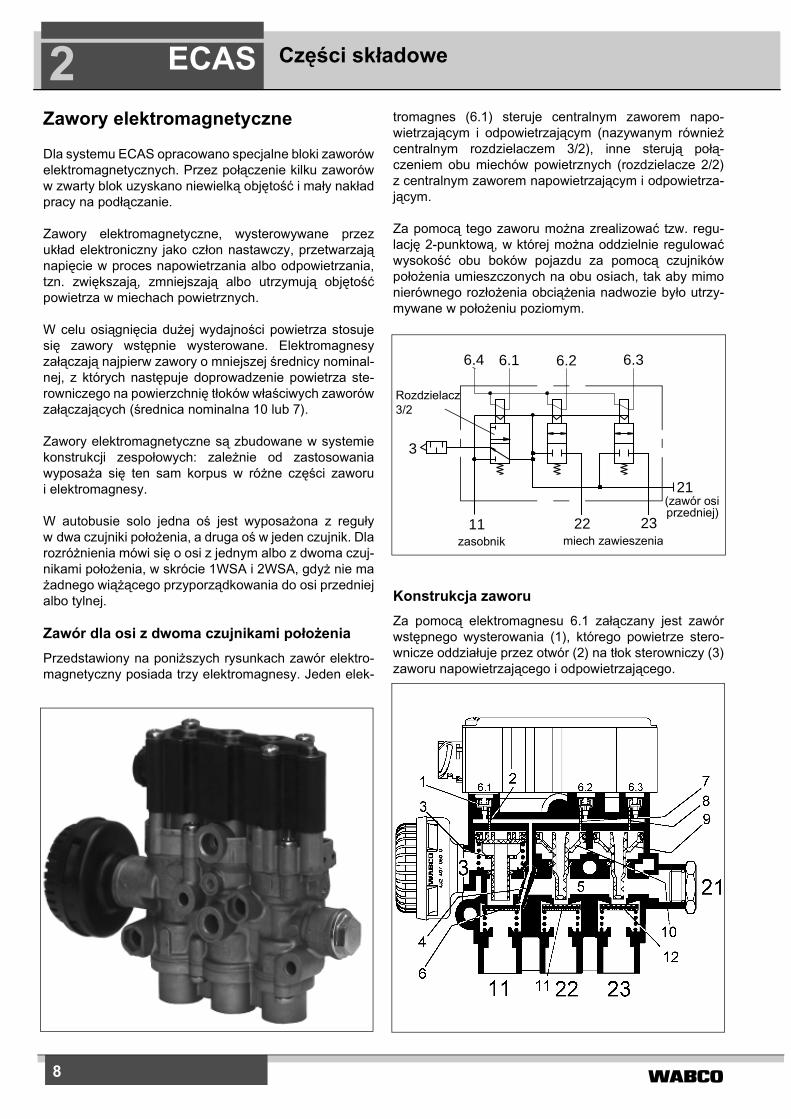
Zawór dla osi z dwoma czujnikami położeniaPrzedstawiony na poniższych rysunkach zawór elektro-magnetyczny posiada trzy elektromagnesy. Jeden elek-
tromagnes (6.1) steruje centralnym zaworem napo-wietrzającym i odpowietrzającym (nazywanym równieżcentralnym rozdzielaczem 3/2), inne sterują połą-czeniem obu miechów powietrznych (rozdzielacze 2/2)z centralnym zaworem napowietrzającym i odpowietrza-jącym.
Za pomocą tego zaworu można zrealizować tzw. regu-lację 2-punktową, w której można oddzielnie regulowaćwysokość obu boków pojazdu za pomocą czujnikówpołożenia umieszczonych na obu osiach, tak aby mimonierównego rozłożenia obciążenia nadwozie było utrzy-mywane w położeniu poziomym.
Konstrukcja zaworuZa pomocą elektromagnesu 6.1 załączany jest zawórwstępnego wysterowania (1), którego powietrze stero-wnicze oddziałuje przez otwór (2) na tłok sterowniczy (3)zaworu napowietrzającego i odpowietrzającego.
11 22 23
21
3
6.36.26.16.4
Rozdzielacz3/2
zasobnik miech zawieszenia
(zawór osiprzedniej)
9�����
Części składowe ECAS 2Zasilanie zaworu wstępnego wysterowania następujeprzez przyłącze 11 (zasobnik) i przez otwór łączący (4).
Rysunek przedstawia zawór napowietrzający i odpowie-trzający w położeniu odpowietrzania, w którym powietrzemoże przepływać z komory (5) przez otwór tłoka stero-wniczego (3) do przyłącza 3.
Przy zasilaniu prądem elektromagnesu 6.1 następujeprzesunięcie tłoka sterowniczego (3) w dół, przy czymnajpierw zostaje zamknięty przez płytkę zaworu (6) otwórtłoka sterowniczego. Następnie płytka ta zostaje wypch-nięta w dół ze swojego położenia (stąd nazwa zawór gniaz-dowy) tak, że powietrze z zasobnika może przepływaćdo komory (5).
Oba inne zawory łączą miechy powietrzne z komorą (5).Zależnie od zasilania prądem elektromagnesów 6.2 albo6.3 następuje obciążenie tłoków sterowniczych (9) i (10)przez otwory (7) i (8) i następuje otwarcie płytek zaworów(11) i (12) otwierających przyłącza 22 i 23.
Na przyłączu 21 można podłączyć zawór elektormagne-tyczny do sterowania drugą osią pojazdu.
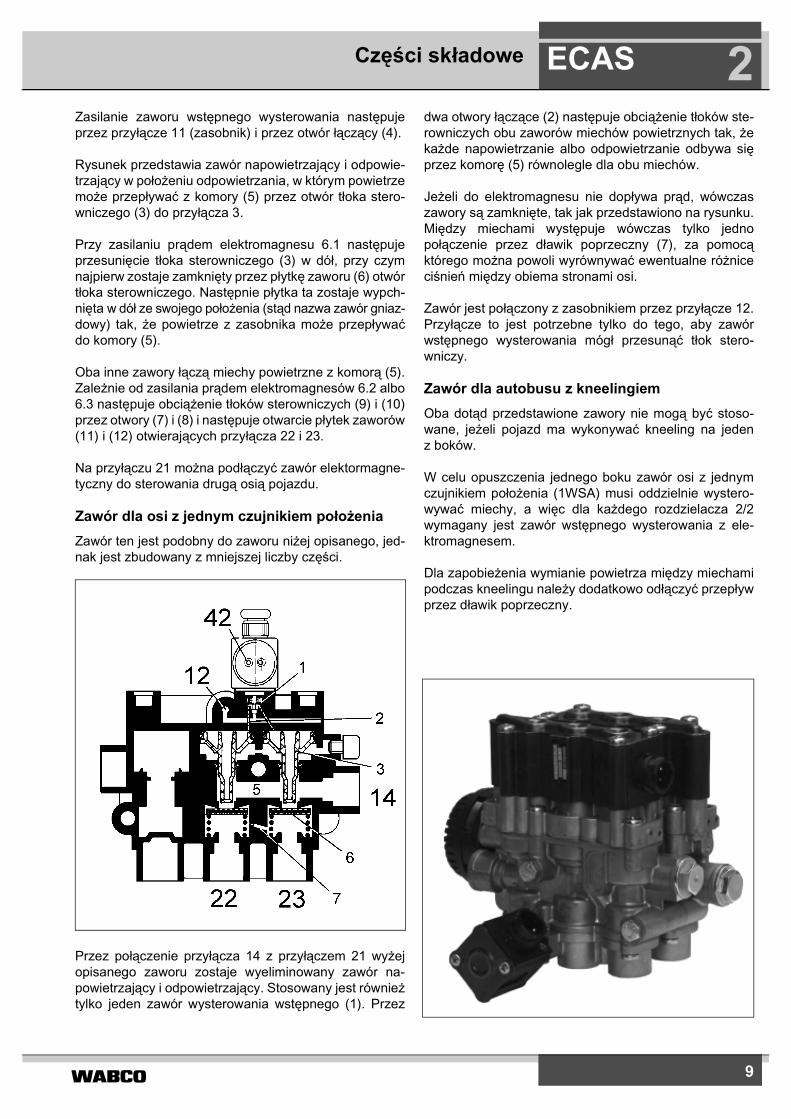
Zawór dla osi z jednym czujnikiem położeniaZawór ten jest podobny do zaworu niżej opisanego, jed-nak jest zbudowany z mniejszej liczby części.
Przez połączenie przyłącza 14 z przyłączem 21 wyżejopisanego zaworu zostaje wyeliminowany zawór na-powietrzający i odpowietrzający. Stosowany jest równieżtylko jeden zawór wysterowania wstępnego (1). Przez
dwa otwory łączące (2) następuje obciążenie tłoków ste-rowniczych obu zaworów miechów powietrznych tak, żekażde napowietrzanie albo odpowietrzanie odbywa sięprzez komorę (5) równolegle dla obu miechów.
Jeżeli do elektromagnesu nie dopływa prąd, wówczaszawory są zamknięte, tak jak przedstawiono na rysunku.Między miechami występuje wówczas tylko jednopołączenie przez dławik poprzeczny (7), za pomocąktórego można powoli wyrównywać ewentualne różniceciśnień między obiema stronami osi.
Zawór jest połączony z zasobnikiem przez przyłącze 12.Przyłącze to jest potrzebne tylko do tego, aby zawórwstępnego wysterowania mógł przesunąć tłok stero-wniczy.
Zawór dla autobusu z kneelingiemOba dotąd przedstawione zawory nie mogą być stoso-wane, jeżeli pojazd ma wykonywać kneeling na jedenz boków.
W celu opuszczenia jednego boku zawór osi z jednymczujnikiem położenia (1WSA) musi oddzielnie wystero-wywać miechy, a więc dla każdego rozdzielacza 2/2wymagany jest zawór wstępnego wysterowania z ele-ktromagnesem.
Dla zapobieżenia wymianie powietrza między miechamipodczas kneelingu należy dodatkowo odłączyć przepływprzez dławik poprzeczny.
10 �����
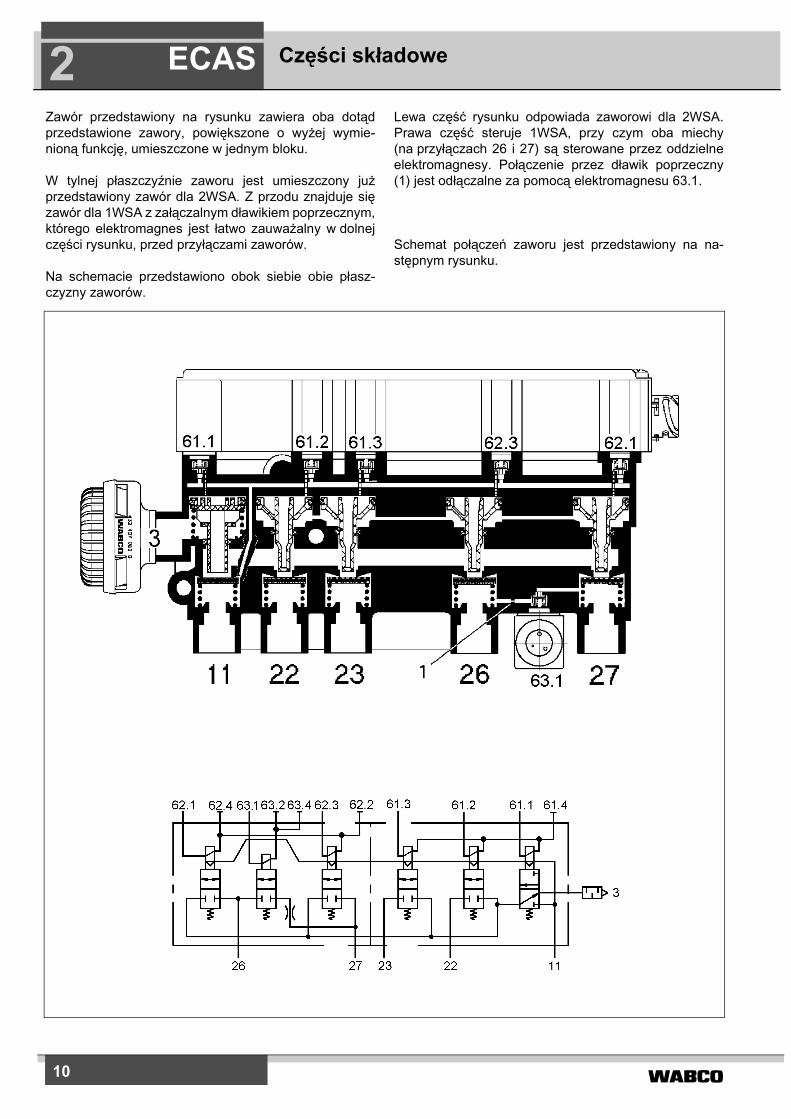
Części składoweECAS2Zawór przedstawiony na rysunku zawiera oba dotądprzedstawione zawory, powiększone o wyżej wymie-nioną funkcję, umieszczone w jednym bloku.
W tylnej płaszczyźnie zaworu jest umieszczony jużprzedstawiony zawór dla 2WSA. Z przodu znajduje sięzawór dla 1WSA z załączalnym dławikiem poprzecznym,którego elektromagnes jest łatwo zauważalny w dolnejczęści rysunku, przed przyłączami zaworów.
Na schemacie przedstawiono obok siebie obie płasz-czyzny zaworów.
Lewa część rysunku odpowiada zaworowi dla 2WSA.Prawa część steruje 1WSA, przy czym oba miechy(na przyłączach 26 i 27) są sterowane przez oddzielneelektromagnesy. Połączenie przez dławik poprzeczny(1) jest odłączalne za pomocą elektromagnesu 63.1.
Schemat połączeń zaworu jest przedstawiony na na-stępnym rysunku.
11�����
Części składowe ECAS 2Czujnik położenia
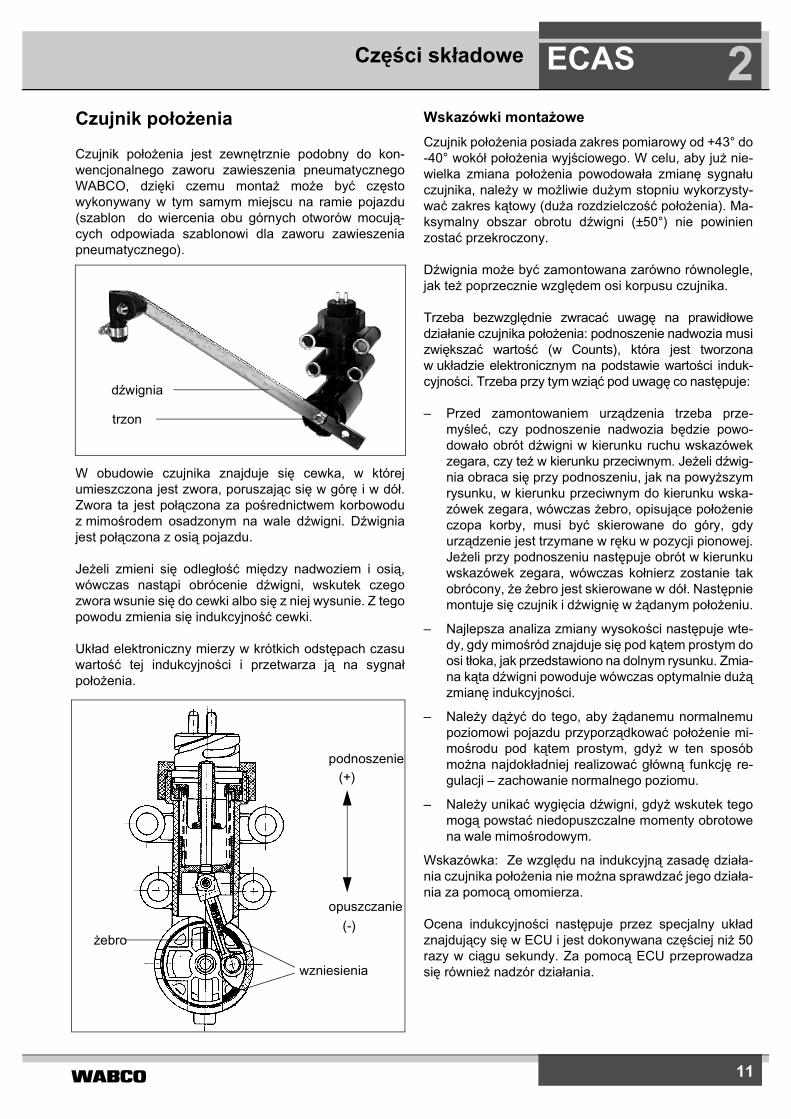
Czujnik położenia jest zewnętrznie podobny do kon-wencjonalnego zaworu zawieszenia pneumatycznegoWABCO, dzięki czemu montaż może być częstowykonywany w tym samym miejscu na ramie pojazdu(szablon do wiercenia obu górnych otworów mocują-cych odpowiada szablonowi dla zaworu zawieszeniapneumatycznego).
W obudowie czujnika znajduje się cewka, w którejumieszczona jest zwora, poruszając się w górę i w dół.Zwora ta jest połączona za pośrednictwem korbowoduz mimośrodem osadzonym na wale dźwigni. Dźwigniajest połączona z osią pojazdu.
Jeżeli zmieni się odległość między nadwoziem i osią,wówczas nastąpi obrócenie dźwigni, wskutek czegozwora wsunie się do cewki albo się z niej wysunie. Z tegopowodu zmienia się indukcyjność cewki.
Układ elektroniczny mierzy w krótkich odstępach czasuwartość tej indukcyjności i przetwarza ją na sygnałpołożenia.
Wskazówki montażoweCzujnik położenia posiada zakres pomiarowy od +43° do-40° wokół położenia wyjściowego. W celu, aby już nie-wielka zmiana położenia powodowała zmianę sygnałuczujnika, należy w możliwie dużym stopniu wykorzysty-wać zakres kątowy (duża rozdzielczość położenia). Ma-ksymalny obszar obrotu dźwigni (±50°) nie powinienzostać przekroczony.
Dźwignia może być zamontowana zarówno równolegle,jak też poprzecznie względem osi korpusu czujnika.
Trzeba bezwzględnie zwracać uwagę na prawidłowedziałanie czujnika położenia: podnoszenie nadwozia musizwiększać wartość (w Counts), która jest tworzonaw układzie elektronicznym na podstawie wartości induk-cyjności. Trzeba przy tym wziąć pod uwagę co następuje:
– Przed zamontowaniem urządzenia trzeba prze-myśleć, czy podnoszenie nadwozia będzie powo-dowało obrót dźwigni w kierunku ruchu wskazówekzegara, czy też w kierunku przeciwnym. Jeżeli dźwig-nia obraca się przy podnoszeniu, jak na powyższymrysunku, w kierunku przeciwnym do kierunku wska-zówek zegara, wówczas żebro, opisujące położenieczopa korby, musi być skierowane do góry, gdyurządzenie jest trzymane w ręku w pozycji pionowej.Jeżeli przy podnoszeniu następuje obrót w kierunkuwskazówek zegara, wówczas kołnierz zostanie takobrócony, że żebro jest skierowane w dół. Następniemontuje się czujnik i dźwignię w żądanym położeniu.
– Najlepsza analiza zmiany wysokości następuje wte-dy, gdy mimośród znajduje się pod kątem prostym doosi tłoka, jak przedstawiono na dolnym rysunku. Zmia-na kąta dźwigni powoduje wówczas optymalnie dużązmianę indukcyjności.
– Należy dążyć do tego, aby żądanemu normalnemupoziomowi pojazdu przyporządkować położenie mi-mośrodu pod kątem prostym, gdyż w ten sposóbmożna najdokładniej realizować główną funkcję re-gulacji – zachowanie normalnego poziomu.
– Należy unikać wygięcia dźwigni, gdyż wskutek tegomogą powstać niedopuszczalne momenty obrotowena wale mimośrodowym.
Wskazówka: Ze względu na indukcyjną zasadę działa-nia czujnika położenia nie można sprawdzać jego działa-nia za pomocą omomierza.
Ocena indukcyjności następuje przez specjalny układznajdujący się w ECU i jest dokonywana częściej niż 50razy w ciągu sekundy. Za pomocą ECU przeprowadzasię również nadzór działania.
dźwignia
trzon
podnoszenie
opuszczanie
(+)
(-)żebro
wzniesienia
12 �����
Części składoweECAS2Czujnik ciśnienia
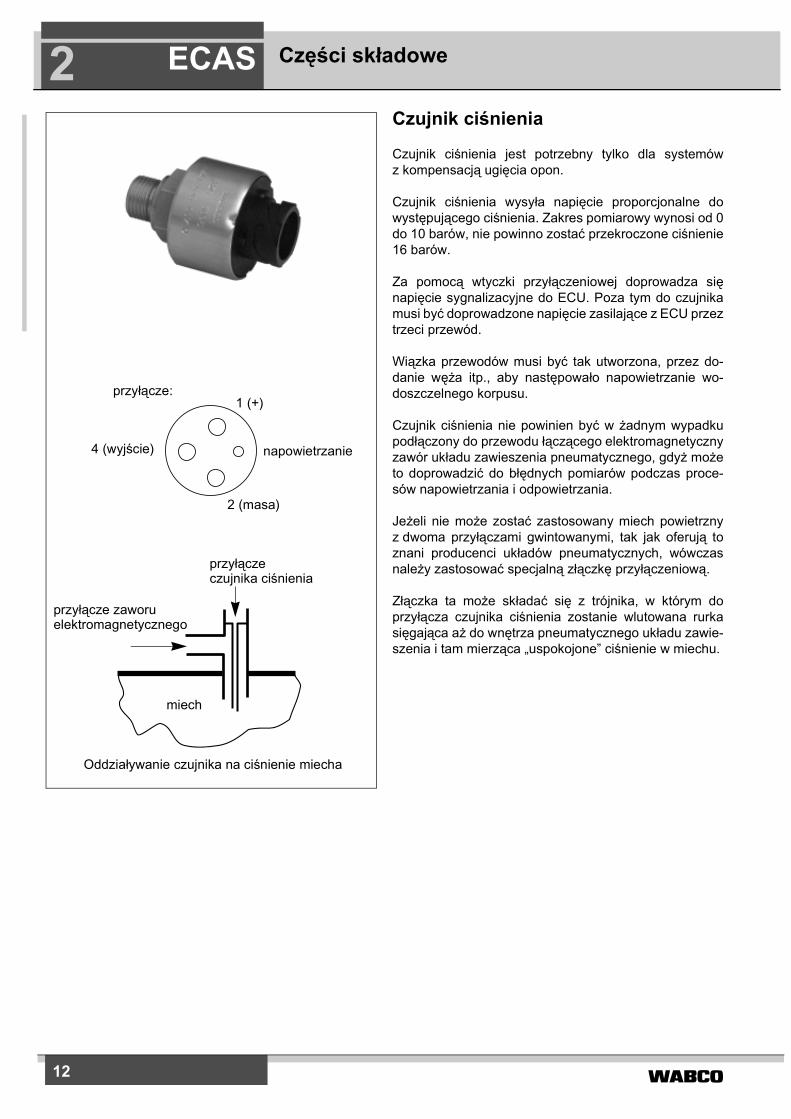
Czujnik ciśnienia jest potrzebny tylko dla systemówz kompensacją ugięcia opon.
Czujnik ciśnienia wysyła napięcie proporcjonalne dowystępującego ciśnienia. Zakres pomiarowy wynosi od 0do 10 barów, nie powinno zostać przekroczone ciśnienie16 barów.
Za pomocą wtyczki przyłączeniowej doprowadza sięnapięcie sygnalizacyjne do ECU. Poza tym do czujnikamusi być doprowadzone napięcie zasilające z ECU przeztrzeci przewód.
Wiązka przewodów musi być tak utworzona, przez do-danie węża itp., aby następowało napowietrzanie wo-doszczelnego korpusu.
Czujnik ciśnienia nie powinien być w żadnym wypadkupodłączony do przewodu łączącego elektromagnetycznyzawór układu zawieszenia pneumatycznego, gdyż możeto doprowadzić do błędnych pomiarów podczas proce-sów napowietrzania i odpowietrzania.
Jeżeli nie może zostać zastosowany miech powietrznyz dwoma przyłączami gwintowanymi, tak jak oferują toznani producenci układów pneumatycznych, wówczasnależy zastosować specjalną złączkę przyłączeniową.
Złączka ta może składać się z trójnika, w którym doprzyłącza czujnika ciśnienia zostanie wlutowana rurkasięgająca aż do wnętrza pneumatycznego układu zawie-szenia i tam mierząca „uspokojone” ciśnienie w miechu.
przyłącze:1 (+)
2 (masa)
4 (wyjście) napowietrzanie
przyłączeczujnika ciśnienia
przyłącze zaworuelektromagnetycznego
miech
Oddziaływanie czujnika na ciśnienie miecha
13�����
Koncepcja bezpieczeństwa ECAS 3Koncepcja bezpieczeństwa
Dla nadzorowania prawidłowego działania układu na-stępuje kontrolowanie przez ECU w określonych odstę-pach czasu dużej liczby połączeń elektrycznych do po-szczególnych części składowych i porównywanie war-tości napięcia i oporności z wartościami zadanymi.
Kontrola ta nie jest możliwa przy wejściach załączają-cych, jak np. wejście łącznika dla poziomu normalnego II.
Poza tym sprawdzane są sygnały czujników lub charak-terystyka zachowania się pojazdu pod względem zgod-ności.
Na przykład brak zmiany poziomu, mimo napowietrzeniamiecha nośnego, stanowi stan niezgodny i dlatego zos-tanie on rozpoznany jako usterka.
Kierowca jest informowany o usterkach za pomocą lamp-ki znajdującej się w desce rozdzielczej. Zależnie odznaczenia usterki lampka usterek świeci się (drobnausterka) albo miga (poważna usterka).
Druga lampka, tzw. lampka ostrzegawcza sygnalizuje kie-rowcy poziom odbiegający od poziomu normalnego.
Po włączeniu zapłonu następuje załączenie tych lampekna dwie sekundy w celu skontrolowania działania (przezkierowcę).
Drobne, jednoznacznie rozpoznawalne usterki, które nie powodują wyłączenia systemuPoniższe usterki umożliwiają ograniczone działanie sys-temu, dzięki czemu pojazd nie musi zostać natychmiastwyłączony:
– awaria jednego czujnika położenia, jeżeli na tejsamej osi istnieje drugi czujnik,
– awaria sygnału prędkości, listwy bezpieczeństwaalbo czujnika ciśnienia,
– usterka w danych WABCO, wprowadzonych dopamięci w ECU.
Układ reaguje w następujący sposób:
– świeci się lampka sygnalizująca usterkę,
– usterka zostaje wprowadzona do trwałej pamięciukładu elektronicznego.
Działanie układu pozostaje zachowane, jednak możebyć ograniczone. Po usunięciu usterki system przecho-dzi ponownie do normalnej pracy.
Usterki powodujące chwilowe wyłączenie systemuChwilowe wyłączenie następuje, jeżeli w czasie 30sekund nie wystąpi żadna reakcja na rozpoczęty albotrwający proces regulacji. Przyczyną może być jednaz poniższych usterek:
– Zawór elektromagnetyczny nie doprowadza powie-trza do miecha powietrznego.
– Zawór elektromagnetyczny nie odpowietrza miecha.
– Zawór elektromagnetyczny pozostaje w położeniunapowietrzania albo odpowietrzania, chociaż procesregulacji został zakończony.
– Usterka w zasilaniu sprężonym powietrzem.
– Pęknięcie miecha powietrznego.
– Zapchane albo zgięte przewody.
Układ elektroniczny nie może zmierzyć usterki na wej-ściach i wyjściach zaworu elektromagnetycznego, zewzględu na brak czujników. Może on jedynie wyciągnąćwniosek o usterce na podstawie sygnału zwrotnegoz czujników położenia, odbiegających od prawidłowejreakcji. Pozostawanie na określonym poziomie, mimonapowietrzania miecha powietrznego, może być spowo-dowane przez niedostateczne ciśnienie w zasobniku.W celu wykluczenia w miarę możliwości tej usterki ECUtłumi komunikat o usterce przez pewien czas powłączeniu zapłonu, aby zapewnić sprężarce pojazdudostateczny czas na wytworzenie ciśnienia.
Reakcje systemu przy usterkach polegających naniezgodności sygnałów:
– zaświecenie się lampki sygnalizującej usterkę,
– wprowadzenie usterki do trwałej pamięci ECU,
– przerwanie bieżącego procesu regulacji i odłączenieautomatycznej korekty poziomu.
Krótkotrwałe usterki podczas pracy albo usterki wystę-pujące tylko pozornie można „usunąć„ przez wyłączeniei ponowne włączenie zapłonu albo przez naciśnięcieprzycisku podnoszenia/opuszczania. Jeżeli usterka po-nownie nie wystąpi, wówczas można aktywować systemw zwykły sposób, w pamięci układu elektronicznego po-zostaje jedynie zapis o usterce.
14 �����
Koncepcja bezpieczeństwaECAS3Poważne, jednoznacznie rozpoznawalne usterki powodujące trwałe odłączenie systemuDo tej kategorii należą usterki powodujące wysokieryzyko eksploatacyjne:
– usterka rozpoznana w programie ECU (człon ROM),
– uszkodzona pamięć robocza (RAM) w ECU,
– błąd parametru; zmieniła się suma kontrolna wartoś-ci parametrów albo ECU nie jest sparametryzowany,
– usterka kalibracji; zmieniła się suma kontrolna albopołożenie kalibracji jest niedopuszczalne,
– przerwa albo krótkie zwarcie w zaworze elektromag-netycznym lub w przewodzie prowadzącym do za-woru elektromagnetycznego,
– awaria wszystkich czujników położenia na jednej osi,
– usterka elektryczna zaworu elektromagnetycznego,blokada rozruchu albo zwolnienia drzwi (o ile uz-godniono tutaj nadzorowanie usterki przez wyregu-lowanie parametru).
Reakcja systemu na poważne usterki:
– miganie lampki sygnalizującej usterkę,
– wprowadzenie usterki do pamięci trwałej w ECU,
– automatyczne, całkowite odłączenie systemu.
System, także mimo wyłączenia i włączenia zapłonu, po-zostaje odłączony aż do usunięcia usterki. W trybie pra-cy awaryjnej możliwa jest jednak zmiana poziomu zapomocą łącznika kierowcy.
Reakcja systemu w przypadku występowania niepewnych stykówW przypadku przejściowych usterek, spowodowanychwystępowaniem niepewnego styku, system tylko takdługo pokazuje wskazania o usterce lub jest odłączony,jak długo występuje usterka. Nie ma przy tym znaczenia,czy chodzi o usterkę drobną, czy też poważną.W każdym wypadku następuje jednak wpis o usterce dopamięci, tak że przy późniejszych naprawach możnaodnaleźć niepewny styk.
Usterki nie rozpoznawane przez ECUJeżeli zostanie przepalone włókno żarzenia jednej z lam-pek wskaźnikowych, wówczas usterka ta nie zostaje za-uważona przez ECU. W tym przypadku obowiązkiemkierowcy jest sprawdzenie działania lampek po włącze-niu zapłonu.
Jak już wspomniano, ECU nie potrafi sprawdzić działa-nia łączników i przycisków. Z drugiej strony, awariałącznika obsługi nie powoduje z reguły dużego ryzyka,gdyż kierowca natychmiast to zauważy.
Bardziej problematyczne jest wygięcie dźwigni czujnikapołożenia, które nie zostanie zauważone, powoduje jed-nak ustawienie błędnego poziomu normalnego albonawet ukośne ustawienie pojazdu.
Usterki tego rodzaju mogą zostać odkryte jedynie przydokładnym sprawdzeniu układu. Po usunięciu tego ro-dzaju usterki czujnik musi zostać ewentualnie wykali-browany na nowo.
15�����
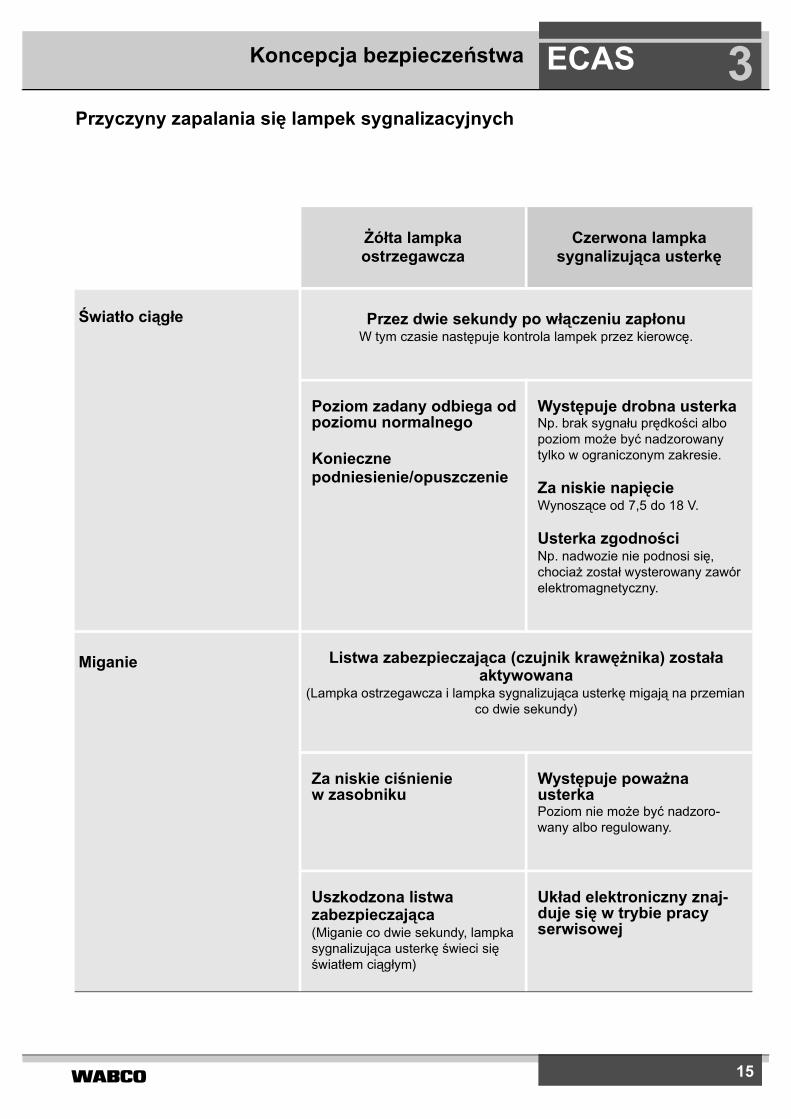
Koncepcja bezpieczeństwa ECAS 3Przyczyny zapalania się lampek sygnalizacyjnych
Żółta lampkaostrzegawcza
Czerwona lampkasygnalizująca usterkę
Światło ciągłe Przez dwie sekundy po włączeniu zapłonuW tym czasie następuje kontrola lampek przez kierowcę.
Poziom zadany odbiega od poziomu normalnego
Konieczne podniesienie/opuszczenie
Występuje drobna usterkaNp. brak sygnału prędkości albo poziom może być nadzorowany tylko w ograniczonym zakresie.
Za niskie napięcieWynoszące od 7,5 do 18 V.
Usterka zgodnościNp. nadwozie nie podnosi się, chociaż został wysterowany zawór elektromagnetyczny.
Miganie Listwa zabezpieczająca (czujnik krawężnika) została aktywowana
(Lampka ostrzegawcza i lampka sygnalizująca usterkę migają na przemian co dwie sekundy)
Za niskie ciśnienie w zasobniku
Występuje poważna usterkaPoziom nie może być nadzoro-wany albo regulowany.
Uszkodzona listwa zabezpieczająca(Miganie co dwie sekundy, lampka sygnalizująca usterkę świeci się światłem ciągłym)
Układ elektroniczny znaj-duje się w trybie pracy serwisowej
16 �����
DiagnozaECAS4
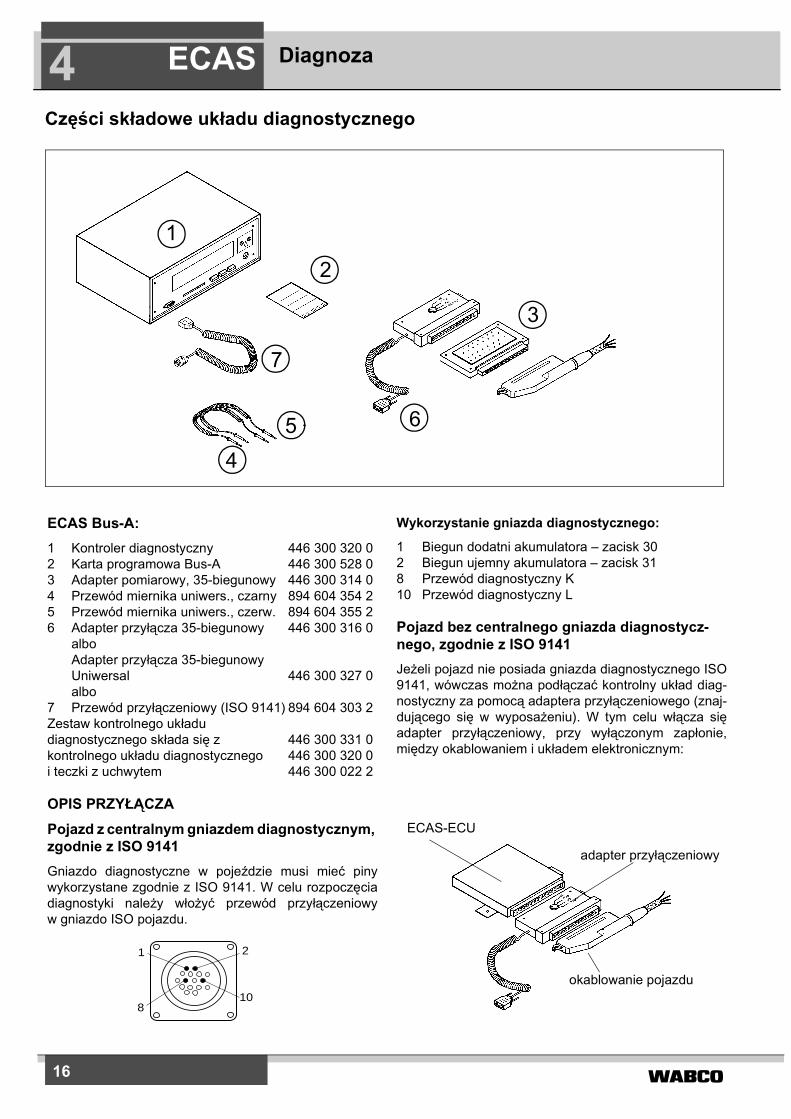
ECAS Bus-A:1 Kontroler diagnostyczny 446 300 320 02 Karta programowa Bus-A 446 300 528 03 Adapter pomiarowy, 35-biegunowy 446 300 314 04 Przewód miernika uniwers., czarny 894 604 354 25 Przewód miernika uniwers., czerw. 894 604 355 26 Adapter przyłącza 35-biegunowy 446 300 316 0
alboAdapter przyłącza 35-biegunowyUniwersal 446 300 327 0albo
7 Przewód przyłączeniowy (ISO 9141) 894 604 303 2Zestaw kontrolnego układudiagnostycznego składa się z 446 300 331 0kontrolnego układu diagnostycznego 446 300 320 0i teczki z uchwytem 446 300 022 2
OPIS PRZYŁĄCZAPojazd z centralnym gniazdem diagnostycznym, zgodnie z ISO 9141Gniazdo diagnostyczne w pojeździe musi mieć pinywykorzystane zgodnie z ISO 9141. W celu rozpoczęciadiagnostyki należy włożyć przewód przyłączeniowyw gniazdo ISO pojazdu.
Wykorzystanie gniazda diagnostycznego:
1 Biegun dodatni akumulatora – zacisk 302 Biegun ujemny akumulatora – zacisk 318 Przewód diagnostyczny K10 Przewód diagnostyczny L
Pojazd bez centralnego gniazda diagnostycz-nego, zgodnie z ISO 9141Jeżeli pojazd nie posiada gniazda diagnostycznego ISO9141, wówczas można podłączać kontrolny układ diag-nostyczny za pomocą adaptera przyłączeniowego (znaj-dującego się w wyposażeniu). W tym celu włącza sięadapter przyłączeniowy, przy wyłączonym zapłonie,między okablowaniem i układem elektronicznym:
1
2
3
45 6
7
Części składowe układu diagnostycznego
1
8
2
10
ECAS-ECU
adapter przyłączeniowy
okablowanie pojazdu
17�����
�
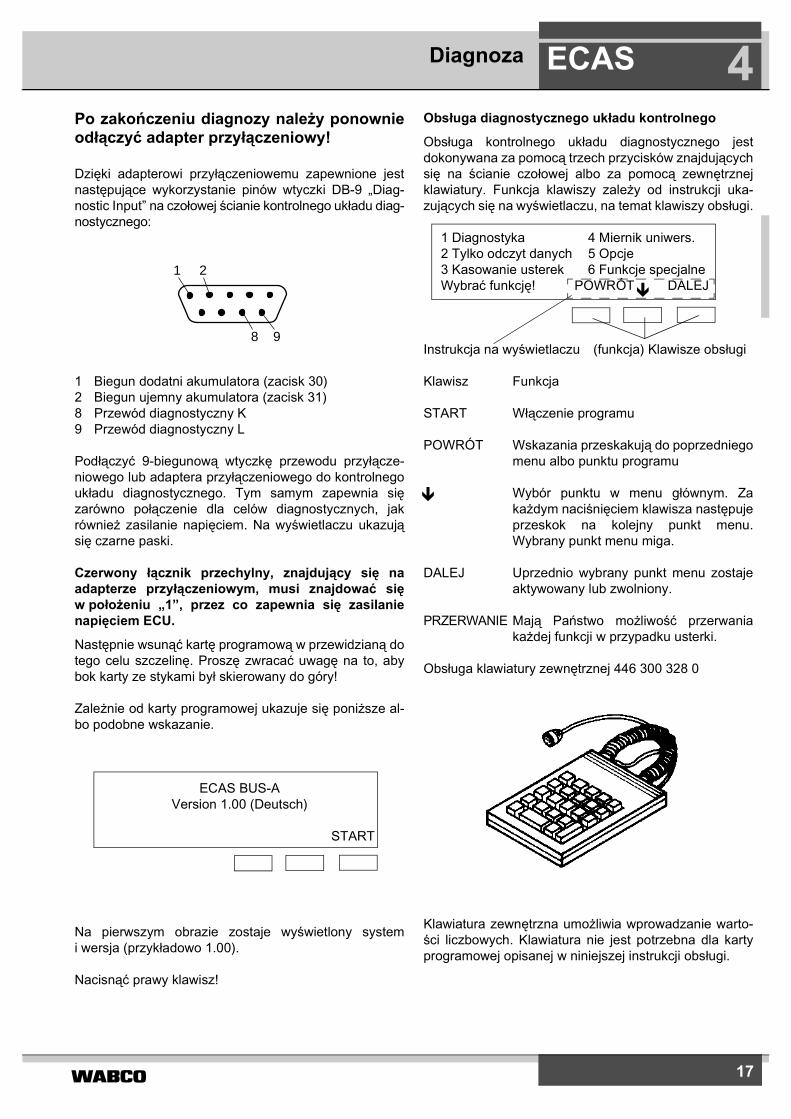
Po zakończeniu diagnozy należy ponownieodłączyć adapter przyłączeniowy!
Dzięki adapterowi przyłączeniowemu zapewnione jestnastępujące wykorzystanie pinów wtyczki DB-9 „Diag-nostic Input” na czołowej ścianie kontrolnego układu diag-nostycznego:
1 Biegun dodatni akumulatora (zacisk 30)2 Biegun ujemny akumulatora (zacisk 31)8 Przewód diagnostyczny K9 Przewód diagnostyczny L
Podłączyć 9-biegunową wtyczkę przewodu przyłącze-niowego lub adaptera przyłączeniowego do kontrolnegoukładu diagnostycznego. Tym samym zapewnia sięzarówno połączenie dla celów diagnostycznych, jakrównież zasilanie napięciem. Na wyświetlaczu ukazująsię czarne paski.
Czerwony łącznik przechylny, znajdujący się naadapterze przyłączeniowym, musi znajdować sięw położeniu „1”, przez co zapewnia się zasilanienapięciem ECU.
Następnie wsunąć kartę programową w przewidzianą dotego celu szczelinę. Proszę zwracać uwagę na to, abybok karty ze stykami był skierowany do góry!
Zależnie od karty programowej ukazuje się poniższe al-bo podobne wskazanie.
ECAS BUS-AVersion 1.00 (Deutsch)
START
Na pierwszym obrazie zostaje wyświetlony systemi wersja (przykładowo 1.00).
Nacisnąć prawy klawisz!
Obsługa diagnostycznego układu kontrolnego
Obsługa kontrolnego układu diagnostycznego jestdokonywana za pomocą trzech przycisków znajdującychsię na ścianie czołowej albo za pomocą zewnętrznejklawiatury. Funkcja klawiszy zależy od instrukcji uka-zujących się na wyświetlaczu, na temat klawiszy obsługi.
1 Diagnostyka 4 Miernik uniwers. 2 Tylko odczyt danych 5 Opcje3 Kasowanie usterek 6 Funkcje specjalneWybrać funkcję! POWRÓT DALEJ
Instrukcja na wyświetlaczu (funkcja) Klawisze obsługi
Klawisz Funkcja
START Włączenie programu
POWRÓT Wskazania przeskakują do poprzedniegomenu albo punktu programu
Wybór punktu w menu głównym. Zakażdym naciśnięciem klawisza następujeprzeskok na kolejny punkt menu.Wybrany punkt menu miga.
DALEJ Uprzednio wybrany punkt menu zostajeaktywowany lub zwolniony.
PRZERWANIE Mają Państwo możliwość przerwaniakażdej funkcji w przypadku usterki.
Obsługa klawiatury zewnętrznej 446 300 328 0
Klawiatura zewnętrzna umożliwia wprowadzanie warto-ści liczbowych. Klawiatura nie jest potrzebna dla kartyprogramowej opisanej w niniejszej instrukcji obsługi.
Diagnoza ECAS 4
1 2
8 9
�
18 �����
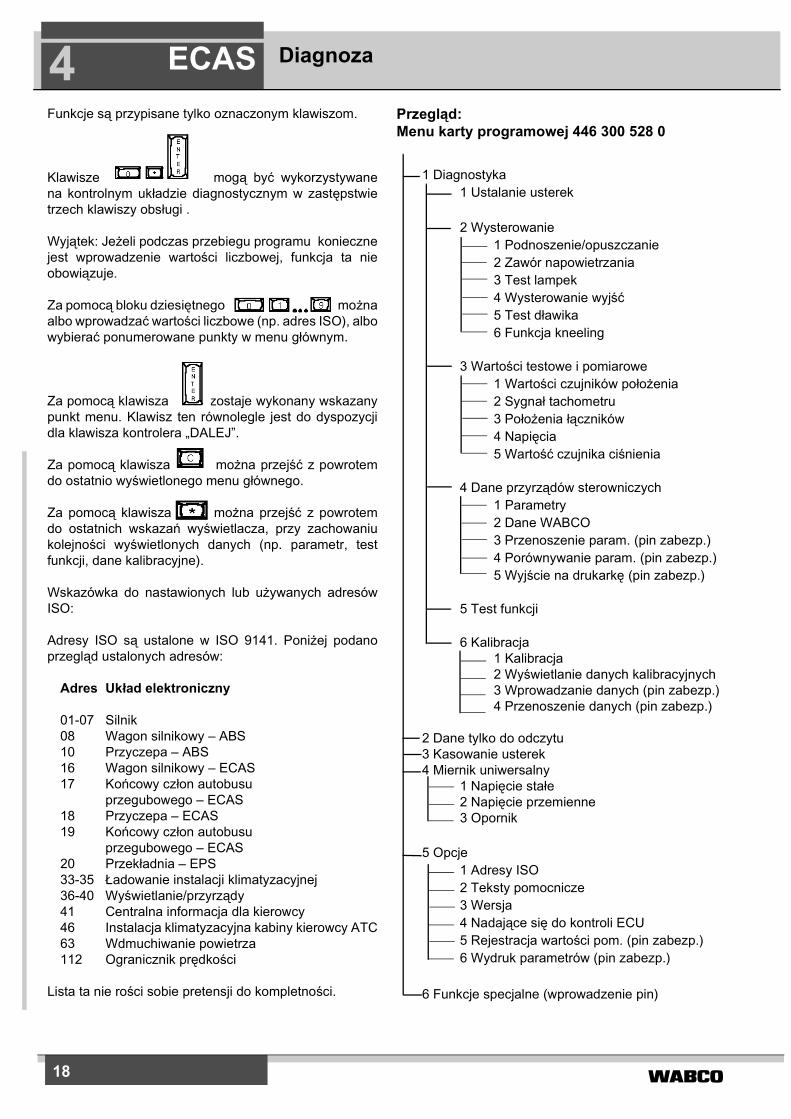
Funkcje są przypisane tylko oznaczonym klawiszom.
Klawisze mogą być wykorzystywanena kontrolnym układzie diagnostycznym w zastępstwietrzech klawiszy obsługi .
Wyjątek: Jeżeli podczas przebiegu programu koniecznejest wprowadzenie wartości liczbowej, funkcja ta nieobowiązuje.
Za pomocą bloku dziesiętnego możnaalbo wprowadzać wartości liczbowe (np. adres ISO), albowybierać ponumerowane punkty w menu głównym.
Za pomocą klawisza zostaje wykonany wskazanypunkt menu. Klawisz ten równolegle jest do dyspozycjidla klawisza kontrolera „DALEJ”.
Za pomocą klawisza można przejść z powrotemdo ostatnio wyświetlonego menu głównego.
Za pomocą klawisza można przejść z powrotemdo ostatnich wskazań wyświetlacza, przy zachowaniukolejności wyświetlonych danych (np. parametr, testfunkcji, dane kalibracyjne).
Wskazówka do nastawionych lub używanych adresówISO:
Adresy ISO są ustalone w ISO 9141. Poniżej podanoprzegląd ustalonych adresów:
Adres Układ elektroniczny
01-07 Silnik08 Wagon silnikowy – ABS10 Przyczepa – ABS16 Wagon silnikowy – ECAS17 Końcowy człon autobusu
przegubowego – ECAS18 Przyczepa – ECAS19 Końcowy człon autobusu
przegubowego – ECAS20 Przekładnia – EPS33-35 Ładowanie instalacji klimatyzacyjnej36-40 Wyświetlanie/przyrządy41 Centralna informacja dla kierowcy46 Instalacja klimatyzacyjna kabiny kierowcy ATC63 Wdmuchiwanie powietrza112 Ogranicznik prędkości
Lista ta nie rości sobie pretensji do kompletności.
Przegląd:Menu karty programowej 446 300 528 0
1 Diagnostyka1 Ustalanie usterek
2 Wysterowanie1 Podnoszenie/opuszczanie2 Zawór napowietrzania3 Test lampek4 Wysterowanie wyjść5 Test dławika6 Funkcja kneeling
3 Wartości testowe i pomiarowe1 Wartości czujników położenia2 Sygnał tachometru3 Położenia łączników4 Napięcia5 Wartość czujnika ciśnienia
4 Dane przyrządów sterowniczych1 Parametry2 Dane WABCO3 Przenoszenie param. (pin zabezp.)4 Porównywanie param. (pin zabezp.)5 Wyjście na drukarkę (pin zabezp.)
5 Test funkcji
6 Kalibracja1 Kalibracja2 Wyświetlanie danych kalibracyjnych3 Wprowadzanie danych (pin zabezp.)4 Przenoszenie danych (pin zabezp.)
2 Dane tylko do odczytu3 Kasowanie usterek4 Miernik uniwersalny
1 Napięcie stałe2 Napięcie przemienne3 Opornik
5 Opcje1 Adresy ISO2 Teksty pomocnicze3 Wersja4 Nadające się do kontroli ECU5 Rejestracja wartości pom. (pin zabezp.)6 Wydruk parametrów (pin zabezp.)
6 Funkcje specjalne (wprowadzenie pin)
DiagnozaECAS4
19�����
Diagnoza ECAS 4System ECAS zasadniczo nie wymaga obsługi technicz-nej. Dzięki zawartemu w programie ECU układowi wy-szukiwania usterek, system ten kontroluje się samoczyn-nie. Dalsza kontrola systemu nie jest konieczna, abstra-hując od sprawdzenia części instalacji, których układ elek-troniczny nie może skontrolować (dźwignie czujników,lampki sygnalizacyjne itp.)
Jeżeli ECU rozpozna usterkę, wówczas miga lampkasygnalizacyjna i dopiero teraz należy sprawdzić systemw warsztacie. Najlepsze jest zastosowanie do tego celukontrolnego układu diagnostycznego, który poza teks-towym nazwaniem usterki może również podać informa-cję o częstości jej występowania i o aktualnym stanieusterki.
Opis punktów menu karty programowej 446 300 528 0 (ECAS-Bus)Patrz rysunek na stronie 18 (przegląg)
1. Wyszukiwanie usterek
Jeżeli sterownik ECAS rozpoznał usterkę w syste-mie (lampka sygnalizacyjna świeci się albo miga),wówczas funkcja ta pomaga w jej odnalezieniu.
Zależnie od systemu ECAS i od rodzaju usterki,podawane są na wyświetlaczu następujące wska-zówki:
– Wskazania tekstowe dotyczące przyczynyusterki i jej miejsca, np. „usterka czujnikapołożenia tylnego prawego”, „pęknięcie prze-wodu” albo „za duża impedancja”.
– Wskazania, jak często usterka występuje.
– Wskazanie „usterka chwilowo nie występuje”oznacza, że usterka nie występuje w momencieprzywołania układu diagnostycznego, tzn., żeusterka nie może być znaleziona przy jej poszu-kiwaniu. Przyczyną tego mogą być np. nie-pewne styki.
Wg instrukcji można przeprowadzić za pomocąwmontowanego miernika uniwersalnego pomiaryelektryczne (np. pomiar oporności), przy wyko-rzystaniu adaptera pomiarowego. Wartość za-dana i wartość rzeczywista są przy tym wskazy-wane na wyświetlaczu.
Po potwierdzeniu wykonania naprawy usterki,zostaje ona skasowana w ECU.
Ścieżka poszukiwania usterek może zostaćopuszczona tylko wtedy, gdy zostały usuniętewszystkie usterki, albo gdy został wyłączonyzapłon.
1.2. Wysterowywanie
Przez „wysterowywanie” można wysterowywaćokreślone części składowe układu ECAS w celusprawdzenia ich działania.
Jeżeli podczas wysterowywania zaworów zosta-nie stwierdzona usterka (np. przerwa w zaworzeprzedniej osi), wówczas nastąpi komunikat o us-terce i wysterowanie przestaje działać.
1.2.1. Podoszenie/opuszczanieZa pomocą tej funkcji można zależnie od wypo-sażenia wysterowywać zawory elektromagnetycz-ne na przedniej i tylnej osi lub poszczególnemiechy powietrzne i odczytywać na wyświetlaczuwartości czujników położenia.
Przy użyciu klawisza „napowietrzanie” powodujesię zwiększenie wartości danego czujnikapołożenia.
Przy użyciu klawisza „odpowietrzanie” zmniejszasię wartość odpowiedniego czujnika położenia.
Jeżeli nie jest podłączony żaden czujnikpołożenia, wówczas w odpowiednim miejscu znaj-duje się wartość „255”. W przypadku zwarciawskazywana jest wartość „0”.
1.2.2. Zawór napowietrzania„Zawór napowietrzania” (nazywany również cen-tralnym rozdzielaczem 3/2) jest połączony szere-gowo z rozdzielaczami 2/2 i określa, czy działafunkcja „podnoszenia” albo „opuszczania”. Jest onzałączany niezależnie od rozdzielaczy 2/2 za po-mocą klawisza „włączenie”. Wartości czujnikówpołożenia nie mogą się zmieniać po naciśnięciuklawisza, w przeciwnym przypadku oznacza to, żewystępuje nieszczelność rozdzielacza 2/2.
1.2.3. Test lampekZa pomocą testu lampek można zależnie od sys-temu włączać różne lampki przez naciśnięcieprzycisku. Mogą to być np.: lampka sygnalizacyj-na, lampka ostrzegawcza, lampka/lampki wskaź-nikowe dla podniesionej osi i pomocniczych środ-ków rozruchu.
2.4. Wysterowywanie wyjść
Można wysterować blokadę rozruchu i zwolnieniedrzwi. Przez naciśnięcie przycisku „A” lub „B” na-stępuje wskazanie, czy blokada rozruchu lubzwolnienie drzwi są włączone czy wyłączone.
20 �����
DiagnozaECAS41.2.5. Test dławika
Za pomocą tej funkcji możliwe jest wysterowaniedławika poprzecznego albo dławika przepływugłównego.
1.2.6. Funkcja kneelinguW zależności od nastawionych opcji można wy-sterowywać odpowiednie zawory w celu przepro-wadzenia testu funkcji kneelingu.
1.3. Wartości testowe i wartości pomiarowe
1.3.1. Wartość czujnika położeniaWskazywane są aktualne wartości czujnikapołożenia.
1.3.2. Sygnał prędkościomierzaZa pomocą tej funkcji można sprawdzićpołączenie z wyjściem sygnału prędkościomierza.W tym celu trzeba doprowadzić pojazd do takiejprędkości, np. na rolkowym stanowisku kontrol-nym, przy której prędkościomierz wysyła sygnał(szybciej niż 1 km/h).
1.3.3. Położenia łącznikówZa pomocą tej funkcji można wskazywać stanróżnych łączników. W tym celu należy uruchomićłączniki w pojeździe!
1.3.4. Napięcie (wskazanie zależne od systemu)Wskazywana jest aktualna wartość napięcia ek-sploatacyjnego i ewentualnie napięć przekaźni-ków zaworów.
Wskazówka: Napięcie przekaźnika zaworów wy-nosi ok. 0,7 V poniżej napięcia eksploatacyjnego.
1.3.5. Wartość czujników ciśnieniaWyświetlona zostaje aktualna wartość czujnikówciśnienia.
1.4. Dane sterowników
1.4.1. ParametryParametry są specyficznymi dla systemu wartoś-ciami nastawczymi ECU, które mogą być wyświet-lane za pomocą kontrolnego układu diagnostycz-nego. Parametry nie mogą być zmieniane przy za-stosowaniu karty programowej 446 300 528 0.
1.4.2. Dane WABCOWyświetlane są dane sterownika ECAS. Jest totyp ECU, nr urządzenia, data produkcji i numersoftware ECU.
1.5. Test funkcjonalny
W tym rozdziale zebrane są punkty „wystero-wanie” i „wartości testowe i pomiarowe”. Umiesz-czone tutaj w innej kolejności kroki kontrolnepozwalają na kolejne sprawdzenie wszystkichczęści składowych systemu. Przywołanie tegorozdziału jest szczególnie godne polecenia powykonaniu dużych napraw. Przy pierwszym insta-lowaniu ECAS należy wybrać rozdział „urucho-mienie”.
1.6. Kalibracja
Kalibracja systemu służy do wyeliminowaniaw znacznym stopniu tolerancji montażowych,powstających przy instalowaniu ECAS oraz tole-rancji przyrządów. Ponowna kalibracja jestrównież konieczna przy wymianie czujników alboukładu elektronicznego.
Rozpoznanie usterek przy kalibracji systemu
Przy niewłaściwej kalibracji można odczytać danekalibracyjne za pomocą punktu menu „wyświe-tlanie danych kalibracyjnych”. Położenia pozio-mów kalibracyjnych muszą wykazywać jed-noznaczne przyporządkowanie.
Kalibracja musi odpowiadać następującym wyma-ganiom:
a) wprowadzone wartość czujników położenia mu-szą być > 4 Counts i
b) muszą być < 255 Counts,
c) poziom głównego ogranicznika musi być więk-szy niż poziom normalny (w Counts) plus potrój-na tolerancja poziomu zadanego plus 3 Counts,
d) poziom dolnego ogranicznika musi być mniejszyniż poziom normalny minus dwukrotna toleran-cja poziomu zadanego.
Wskazówka: Tolerancje poziomu zadanegoz przodu/z tyłu są ustalone przez parametr 10/12.
1.6.1. Wskazywanie danych kalibracyjnychWyświetlone zostają dane kalibracyjne, znaj-dujące się w pamięci sterownika ECAS.
1.6.2. Kalibracja czujnika ciśnienia (opcja)Czujnik ciśnienia jest kalibrowany na ciśnienie at-mosferyczne. Ciśnienie w podłączonym miechupowietrznym jest likwidowane za pomocą klawiszyobsługi na kontrolnym układzie diagnostycznym.
21�����
Diagnoza ECAS 41.6.3. Wyświetlanie wartości czujnika ciśnienia (opcja)
Wskazywana jest wartość kalibracji czujnikaciśnienia.
1.7. Dane przeznaczone jedynie do odczytywania
Działanie jest możliwe tylko z określonym ECU.Po włączeniu zapłonu sterownik ECAS wysyławciąż powtarzające się pakiety danych o nas-tępującej zawartości:
– dane specyficzne dla klienta,
– aktualne i znajdujące się w pamięci numery us-terek,
– specyficzne dla systemu wartości pomiarowe.
W tym punkcie menu można wyświetlać pakietydanych.
1.8. Kasowanie usterek
Funkcja ta służy do jednoczesnego skasowaniawszystkich znajdujących się w pamięci usterek.Jeżeli usterka jeszcze występuje, wówczas zosta-je ona natychmiast ponownie wpisana do ECU.Funkcja „kasowanie usterek” jest możliwa równieżtylko z określonym ECU.
1.9. Miernik uniwersalny
Za pomocą zintegrowanej funkcji miernika uniwer-salnego można wykonywać pomiary elektrycznew obszarze istotnym dla pojazdu (niskie napięcie).Trzeba przy tym jedynie wybrać żądaną funkcjępomiaru (napięcie stałe, napięcie przemienne albooporność). Zakres pomiarowy zostaje automatycz-nie nastawiony przez przyrząd.
Uwaga! Przyrząd pomiarowy może być stosowanyjedynie w następujących zakresach pomiarowych:
Napięcie stałe: 2V, 20V, 50V
Napięcie przemienne: 2V, 35V
Oporność: 20�, 200�, 2k�, 20k�, 95k�
2.0. Opcje
„Opcje” zawierają następujące podpunkty:
Adres ISOZa pomocą adresu ISO kontrolny układ diagnos-tyczny po uruchomieniu systemu nawiązuje kon-takt z odpowiednim elektronicznym układem po-jazdu. Na podstawie adresu ISO ECU rozpoznaje,że ma podjąć transmisję danych z układem kon-trolnym. Dlatego każdy typ układu elektronicznegoposiada własny, możliwy do nastawienia adres(np. ECAS autobusu przegubowego = 16, koń-cowy człon autobusu przegubowego = 17).
Teksty pomocniczeFunkcja ta daje kierowcy możliwość uzyskania do-datkowych objaśnień na temat obsługi. Jeżelifunkcja jest włączona, wówczas w odpowiednichmiejscach między kolejnymi krokami programuukazują się dokładniejsze objaśnienia.
WersjeFunkcja ta wskazuje stan zastosowanego układukontrolnego i karty programu przy wysyłce:
– Hardware układu kontrolnego
– System operacyjny układu kontrolnego z po-daniem wersji i daty opracowania
– Wersja miernika uniwersalnego
– Karta programowa z podaniem wersji, datyopracowania i sumy kontrolnej
22 �����
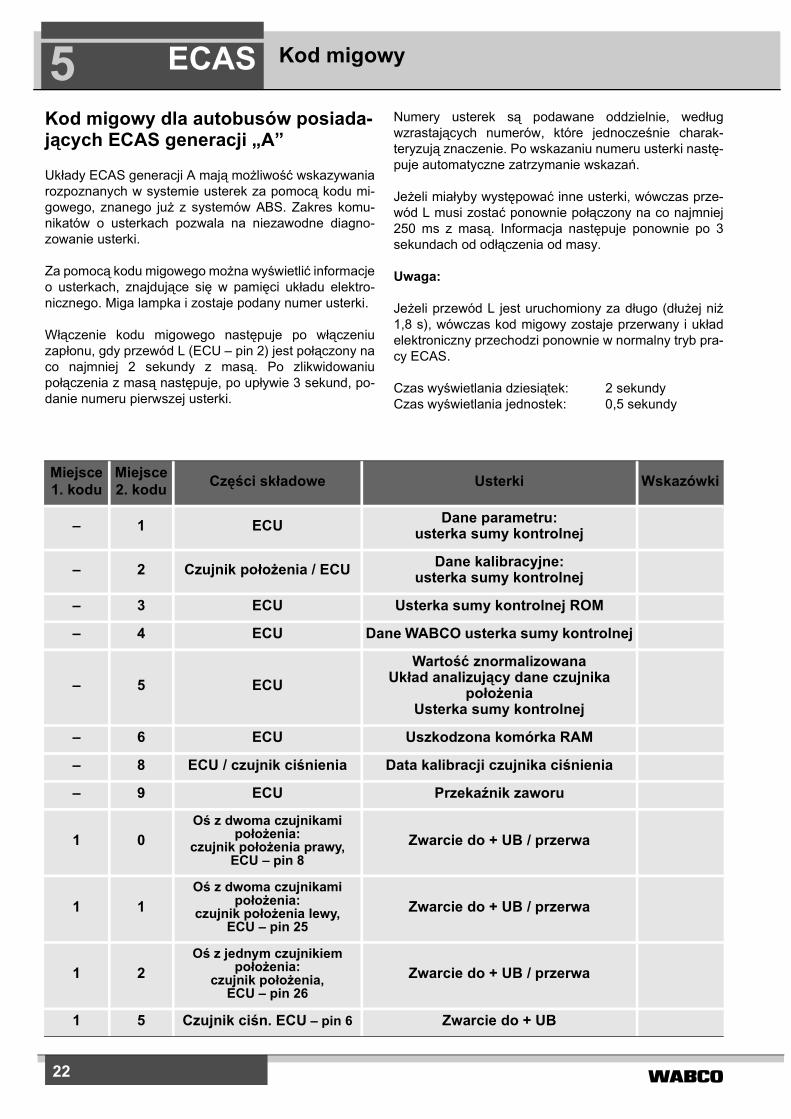
Kod migowyECAS5Kod migowy dla autobusów posiada-jących ECAS generacji „A”
Układy ECAS generacji A mają możliwość wskazywaniarozpoznanych w systemie usterek za pomocą kodu mi-gowego, znanego już z systemów ABS. Zakres komu-nikatów o usterkach pozwala na niezawodne diagno-zowanie usterki.
Za pomocą kodu migowego można wyświetlić informacjeo usterkach, znajdujące się w pamięci układu elektro-nicznego. Miga lampka i zostaje podany numer usterki.
Włączenie kodu migowego następuje po włączeniuzapłonu, gdy przewód L (ECU – pin 2) jest połączony naco najmniej 2 sekundy z masą. Po zlikwidowaniupołączenia z masą następuje, po upływie 3 sekund, po-danie numeru pierwszej usterki.
Numery usterek są podawane oddzielnie, wedługwzrastających numerów, które jednocześnie charak-teryzują znaczenie. Po wskazaniu numeru usterki nastę-puje automatyczne zatrzymanie wskazań.
Jeżeli miałyby występować inne usterki, wówczas prze-wód L musi zostać ponownie połączony na co najmniej250 ms z masą. Informacja następuje ponownie po 3sekundach od odłączenia od masy.
Uwaga:
Jeżeli przewód L jest uruchomiony za długo (dłużej niż1,8 s), wówczas kod migowy zostaje przerwany i układelektroniczny przechodzi ponownie w normalny tryb pra-cy ECAS.
Czas wyświetlania dziesiątek: 2 sekundyCzas wyświetlania jednostek: 0,5 sekundy
Miejsce 1. kodu
Miejsce 2. kodu Części składowe Usterki Wskazówki
– 1 ECU Dane parametru: usterka sumy kontrolnej
– 2 Czujnik położenia / ECU Dane kalibracyjne:usterka sumy kontrolnej
– 3 ECU Usterka sumy kontrolnej ROM
– 4 ECU Dane WABCO usterka sumy kontrolnej
– 5 ECUWartość znormalizowana
Układ analizujący dane czujnika położenia
Usterka sumy kontrolnej
– 6 ECU Uszkodzona komórka RAM
– 8 ECU / czujnik ciśnienia Data kalibracji czujnika ciśnienia
– 9 ECU Przekaźnik zaworu
1 0Oś z dwoma czujnikami
położenia: czujnik położenia prawy,
ECU – pin 8Zwarcie do + UB / przerwa
1 1Oś z dwoma czujnikami
położenia: czujnik położenia lewy,
ECU – pin 25Zwarcie do + UB / przerwa
1 2Oś z jednym czujnikiem
położenia:czujnik położenia,
ECU – pin 26Zwarcie do + UB / przerwa
1 5 Czujnik ciśn. ECU – pin 6 Zwarcie do + UB
23�����
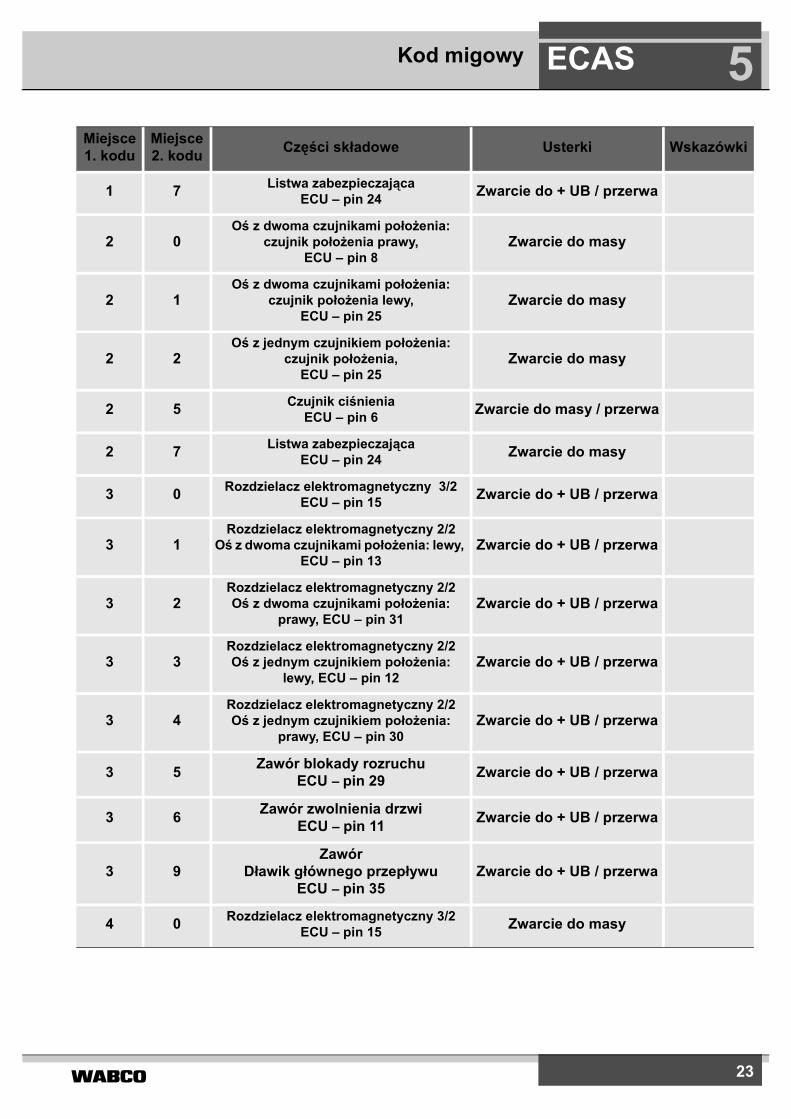
Kod migowy ECAS 5Miejsce 1. kodu
Miejsce 2. kodu Części składowe Usterki Wskazówki
1 7 Listwa zabezpieczającaECU – pin 24 Zwarcie do + UB / przerwa
2 0Oś z dwoma czujnikami położenia:
czujnik położenia prawy,ECU – pin 8
Zwarcie do masy
2 1Oś z dwoma czujnikami położenia:
czujnik położenia lewy, ECU – pin 25
Zwarcie do masy
2 2Oś z jednym czujnikiem położenia:
czujnik położenia, ECU – pin 25
Zwarcie do masy
2 5 Czujnik ciśnieniaECU – pin 6 Zwarcie do masy / przerwa
2 7 Listwa zabezpieczającaECU – pin 24 Zwarcie do masy
3 0 Rozdzielacz elektromagnetyczny 3/2ECU – pin 15 Zwarcie do + UB / przerwa
3 1Rozdzielacz elektromagnetyczny 2/2
Oś z dwoma czujnikami położenia: lewy, ECU – pin 13
Zwarcie do + UB / przerwa
3 2Rozdzielacz elektromagnetyczny 2/2 Oś z dwoma czujnikami położenia:
prawy, ECU – pin 31Zwarcie do + UB / przerwa
3 3Rozdzielacz elektromagnetyczny 2/2 Oś z jednym czujnikiem położenia:
lewy, ECU – pin 12Zwarcie do + UB / przerwa
3 4Rozdzielacz elektromagnetyczny 2/2 Oś z jednym czujnikiem położenia:
prawy, ECU – pin 30Zwarcie do + UB / przerwa
3 5 Zawór blokady rozruchuECU – pin 29 Zwarcie do + UB / przerwa
3 6 Zawór zwolnienia drzwiECU – pin 11 Zwarcie do + UB / przerwa
3 9Zawór
Dławik głównego przepływuECU – pin 35
Zwarcie do + UB / przerwa
4 0 Rozdzielacz elektromagnetyczny 3/2 ECU – pin 15 Zwarcie do masy
24 �����
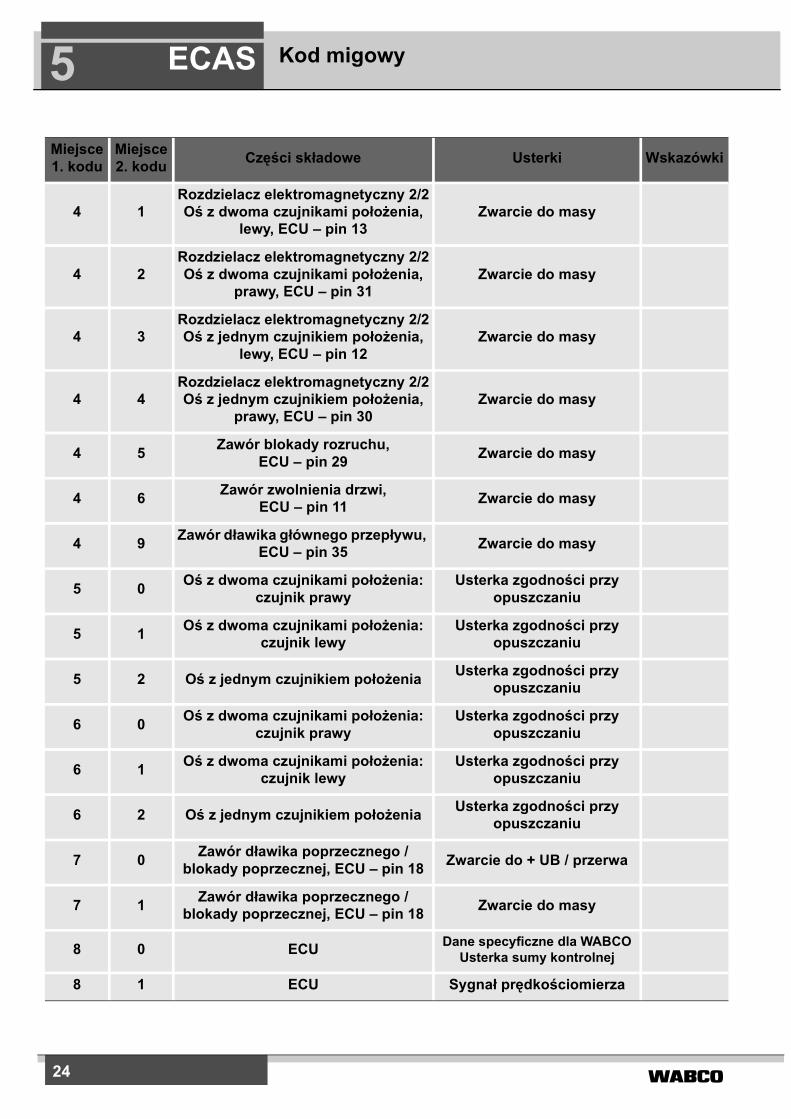
Kod migowyECAS5Miejsce 1. kodu
Miejsce 2. kodu Części składowe Usterki Wskazówki
4 1Rozdzielacz elektromagnetyczny 2/2Oś z dwoma czujnikami położenia,
lewy, ECU – pin 13Zwarcie do masy
4 2Rozdzielacz elektromagnetyczny 2/2Oś z dwoma czujnikami położenia,
prawy, ECU – pin 31Zwarcie do masy
4 3Rozdzielacz elektromagnetyczny 2/2Oś z jednym czujnikiem położenia,
lewy, ECU – pin 12Zwarcie do masy
4 4Rozdzielacz elektromagnetyczny 2/2Oś z jednym czujnikiem położenia,
prawy, ECU – pin 30Zwarcie do masy
4 5 Zawór blokady rozruchu,ECU – pin 29 Zwarcie do masy
4 6 Zawór zwolnienia drzwi,ECU – pin 11 Zwarcie do masy
4 9 Zawór dławika głównego przepływu, ECU – pin 35 Zwarcie do masy
5 0 Oś z dwoma czujnikami położenia: czujnik prawy
Usterka zgodności przy opuszczaniu
5 1 Oś z dwoma czujnikami położenia: czujnik lewy
Usterka zgodności przy opuszczaniu
5 2 Oś z jednym czujnikiem położenia Usterka zgodności przy opuszczaniu
6 0 Oś z dwoma czujnikami położenia: czujnik prawy
Usterka zgodności przy opuszczaniu
6 1 Oś z dwoma czujnikami położenia: czujnik lewy
Usterka zgodności przy opuszczaniu
6 2 Oś z jednym czujnikiem położenia Usterka zgodności przy opuszczaniu
7 0 Zawór dławika poprzecznego /blokady poprzecznej, ECU – pin 18 Zwarcie do + UB / przerwa
7 1 Zawór dławika poprzecznego /blokady poprzecznej, ECU – pin 18 Zwarcie do masy
8 0 ECU Dane specyficzne dla WABCO Usterka sumy kontrolnej
8 1 ECU Sygnał prędkościomierza
25�����
Kalibracja ECAS 6Kasowanie usterek znajdujących się w pamięci
Skasowanie wszystkich zgromadzonych w pamięci us-terek następuje przez połączenie przewodu L z masą,przy wyłączonym zapłonie. Następnie musi zostaćponownie włączony zapłon. Trzeba przy tym zwracaćuwagę na to, aby zapłon był wyłączony dłużej niż 6,4 slub dłużej niż parametr 38 (wybieg po wyłączeniuzapłonu).
Połączenie przewodu L z masą musi trwać przy włącze-niu zapłonu przez co najmniej 2 sekundy.
Po upływie 2 sekund następuje skasowanie całej pamię-ci usterek i układ elektroniczny przechodzi automatycz-nie do trybu pracy normalnej.
Kasowanie wybranych usterek nie jest możliwe!
Kalibracja
Aby ECU mógł prawidłowo ocenić wartości uzyskiwanez czujników, należy po pierwszym zainstalowaniu sys-temu albo także po przeprowadzeniu napraw, np. czujni-ka położenia (przestrzegać wskazówek producentapojazdu), ponownie nastawić układ ECAS na dane spe-cyficzne dla pojazdu (zgodnie z jego wysokością), tzn.czy np. chwilowo zmierzona wartość czujnika położeniaodpowiada poziomowi normalnemu.
Wartość ta na stale zostaje wpisana do trwałej pamięciukładu elektronicznego z oceną „poziom normalny” i odtej chwili jest ponownie do dyspozycji dla komendy „po-ziom normalny”. Przez kalibrację następuje wyrównanietolerancji części składowych systemu. Przy wymianieczęści składowych trzeba więc ponownie przeprowadzićproces kalibracyjny.
Kalibracji podlegają trzy wartości wysokości czujnikówpołożenia: poziom normalny, górny i dolny poziom gra-niczny. Górny i dolny poziom graniczny nie musi przy tymodpowiadać oparciu się o ograniczniki. Wykalibrowanewartości zostają przejęte przez ECAS jako najwyższyi najniższy poziom.
Opcjonalnie może być wykalibrowany tylko poziom nor-malny. Górny i dolny poziom graniczny zostają wówczaswprowadzone jako wartości liczbowe.
Przed kalibracją trzeba zapewnić prawidłowe działanieczujnika położenia. Pojazd musi stać na poziomymi płaskim podłożu. W systemach z czujnikiem ciśnieniatrzeba dodatkowo wykalibrować wartość czujnikaciśnienia (ciśnienie atmosferyczne).
Kalibracja pojazdów z dwoma czujnikami położenia na jednej osiPrzy kalibracji, mimo jednakowej wysokości nadwozia poobu stronach, może występować różne ciśnieniew miechach, ze względu na działanie stabilizatora osi.Ponieważ zawór elektromagnetyczny dla osi z dwomaczujnikami położenia nie posiada dławika poprzecznego,więc tego rodzaju różnica ciśnień nie zostaje skompen-sowana. Przy niewielkiej tolerancji wartości zadanej,w późniejszej eksploatacji będzie wciąż występowała taróżnica ciśnień, co ma tę wadę, że oś będzie jednostron-nie bardziej obciążona.
Z tego powodu korzystne jest, aby podczas kalibracjipołączyć wężem miechy powietrzne osi, wykorzystującdo tego celu przyłącza kontrolne. W ten sposób miechymają wówczas jednakowe ciśnienie i nie występująnaprężenia w korpusie osi.
Kalibracja czujników położenia za pomocą kon-trolnego układu diagnostycznegoKalibrację systemu za pomocą kontrolnego układu diag-nostycznego przeprowadza się w sposób następujący:
a) Rozpoczyna się w ten sposób, że przez wystero-wanie za pomocą kontrolnego układu diagnostycz-nego doprowadza się pojazd do położenia normal-nego I (poziom normalny każdorazowo dla przed-niej i tylnej osi). Następnie rozpoczyna się kalib-rację (poziomy rzeczywiste zostają wprowadzonedo pamięci jako poziomy normalne).
b) Za pomocą kontrolnego układu diagnostycznegonależy doprowadzić pojazd do górnego poziomu.Następnie ponownie włączyć proces kalibracji(poziomy rzeczywiste zostaną wprowadzone dopamięci jako poziomy górnych ograniczników).
c) Za pomocą kontrolnego układu diagnostycznegonależy doprowadzić pojazd do poziomu dolnychograniczników. Następnie ponownie włączyćproces kalibracji (poziomy rzeczywiste zostanąwprowadzone do pamięci jako poziomy dolnychzderzaków).
Po zakończeniu poszczególnych faz kalibracji, kontrolnyukład diagnostyczny wskazuje, na podstawie sprawdze-nia pamięci usterek, czy kalibracja została przeprowa-dzona prawidłowo czy błędnie.
Trzeba przy tym zwracać uwagę na następujące wyma-gania:
– wprowadzone wartości czujników położeniamuszą być > 4 Counts
26 �����
KalibracjaECAS6– wprowadzone wartości czujników położenia
muszą być < 255 Counts
– górny poziom ograniczników musi być większyniż poziom normalny plus trzykrotna tolerancjapoziomu normalnego, plus 3 Counts
– dolny poziom zderzaków musi być mniejszy niżpoziom normalny, minus dwukrotna tolerancjapoziomu normalnego
Kalibracja tylko jednego poziomu (poziom nor-malny)Wychodząc z poziomu normalnego tylnego lewegoi prawego, należy w następujący sposób ustalić wartościkalibracyjne „górnego/dolnego poziomu ogranicznikówtylnych”:
1. Należy obliczyć różnicę „górnego poziomu ogra-niczników tylnych – lewych” – „poziom normalnytylny lewy” i „poziomu ograniczników górnych tyl-nych prawych” – „poziom normalny tylny prawy”.
2. Mniejszą różnicę należy dodać do oczekiwanejwartości kalibracji „poziomu normalnego tylnegolewego” i w ten sposób uzyskuje się konieczną dowprowadzenia wartość kalibracji – „górny poziomograniczników tylnych”.
3. Należy obliczyć różnicę „poziomu normalnego tyl-nego lewego” – „dolny poziom ograniczników tyl-nych lewych” i „poziomu normalnego tylnegoprawego” – „dolny poziom ograniczników tylnychprawych”.
4. Mniejszą różnicę należy odjąć od oczekiwanejwartości kalibracji – „poziom normalny tylny lewy”i w ten sposób otrzymuje się konieczną do wpro-wadzenia wartość kalibracji „poziom ogranicz-ników dolnych tylnych”.
Obliczone dane zostaną wprowadzone do pamięci zapomocą kontrolnego układu diagnostycznego. Następ-nie zostaje w następujący sposób uruchomiony proceskalibracji:
– Pojazd należy ustawić na poziomie normalnymprzez wysterowanie za pomocą kontrolnegoukładu diagnostycznego.
– Przez włączenie procesu kalibracji następujerozpoznanie poziomu jako poziom normalny.
Po zakończeniu poszczególnych faz kalibracji kontrolnyukład diagnostyczny wskazuje, na podstawie sprawdze-nia pamięci usterek, czy kalibracja została przeprowa-dzona w sposób prawidłowy czy błędny.
Kalibracja czujników ciśnienia za pomocą kon-trolnego układu diagnostycznegoPrzez odpowietrzenie miechów powietrznych należy za-pewnić, aby ciśnienie zarejestrowane przez czujnikciśnienia odpowiadało ciśnieniu atmosferycznemu (wczy-tane Counts wynoszą wówczas 10 do 30 = 1000 mbar±500 mbar). Następnie należy włączyć proces kalibracji.Błąd kalibracji zostaje wskazany przez kontrolny układdiagnostyczny.
Kalibracja systemu bez zastosowania kontrol-nego układu diagnostycznego (kalibracja ręczna)Ręczna kalibracja trzech poziomów
a) Połączyć przewód K ECU z masą.
b) Włączyć zapłon.
c) Przez kilka sekund odbywa się test lampek, lampkizostają włączone.
d) Lampki gasną po ok. 2 sekundach.
e) Podczas następnych 5 sekund należy przerwaćpołączenie masy z przewodem K.
f) Jeżeli ECU rozpoznał wymaganie kalibracji,wówczas włącza się lampka ostrzegawcza.
g) Pierwszym, przewidzianym do kalibracji pozio-mem jest poziom normalny I. W tym celu należypodnieść/opuścić pojazd na poziom normalny I.
h) Połączyć przewód K z masą.
i) Przerwać połączenie z masą. Poziomy rzeczy-wiste zostaną zapamiętane jako poziomy nor-malne I. Tym samym nastąpiło wykalibrowaniepoziomów normalnych I.
j) Drugie, z przewidzianych do wykalibrowania po-ziomów, to górne poziomy ograniczników.
k) Połączyć przewód K z masą.
l) Przerwać połączenie z masą. Poziomy rzeczy-wiste zostaną zapamiętane jako górne poziomyograniczników. Tym samym nastąpiło wykalibro-wanie górnych poziomów ograniczników.
m) Trzecimi, przewidzianymi do wykalibrowania po-ziomami, są dolne poziomy ograniczników.
n) Połączyć przewód K z masą.
27�����
Kalibracja ECAS 6o) Przerwać połączenie z masą. Poziomy rzeczy-
wiste zostaną zapamiętane jako dolne poziomyograniczników. Tym samym nastąpiło wykalibro-wanie dolnych poziomów ograniczników.
p) Jeżeli kalibracja przebiegła w sposób bezbłędny,wówczas lampka sygnalizująca usterki świeci sięświatłem ciągłym, w przeciwnym wypadku miga.
q) Przez wyłączenie i ponowne włączenie zapłonumożna dokonać przełączenia na normalną pracę.Jeżeli kalibracja była nieprawidłowa, wówczaslampka sygnalizująca usterkę miga nadal. Jeżelikalibracja była prawidłowa, lampka usterekgaśnie. Lampka ostrzegawcza świeci się światłemciągłym (ponieważ poziom rzeczywisty odbiegajeszcze od poziomu normalnego).
Ręczna kalibracja tylko jednego poziomu (poziom normalny)Kalibracja ręczna przebiega tak, jak wyżej opisano, jed-nak odpadają czynności j do q. Po pomyślnym przepro-wadzeniu kalibracji gaśnie jednak lampka ostrzegawcza(punkt q), ponieważ poziom rzeczywisty jest równy po-ziomowi normalnemu.
Jeżeli ma zostać wykalibrowany tylko poziom normalny I,wówczas przed dokonaniem kalibracji muszą zostaćwpisane do pamięci, za pomocą kontrolnego układu dia-gnostycznego, następujące dane kalibracyjne:
– górny poziom ograniczników z tyłu [Counts],
– górny poziom ograniczników z przodu [Counts],
– dolny poziom ograniczników z tyłu [Counts],
– dolny poziom ograniczników z przodu [Counts].
Ręczna kalibracja czujnika ciśnieniaa) Włączyć zapłon.
b) Przez 2 sekundy następuje test lampek, tzn. lamp-ki sygnalizacyjne zostają włączone.
c) Podczas testu lampek połączyć przewód Kz masą. Lampki pozostają włączone przez 2 se-kundy, licząc od momentu połączenia z masą.
d) Po zgaśnięciu lampki sygnalizacyjnej przerwaćpołączenie przewodu K z masą w czasie następ-nych 5 sekund.
e) Gdy ECU rozpoznał wymaganie kalibracji, wów-czas włącza się lampka ostrzegawcza.
f) Miech powietrzny z podłączonym czujnikiem ciś-nienia należy tak długo odpowietrzać, aż z całąpewnością wystąpi w nim ciśnienie atmosferyczne.
g) Połączyć przewód K z masą.
h) Przerwać połączenie z masą. Wartości rzeczy-wiste czujników ciśnienia zostaną zapamiętanejako wartości 0 bar. Tym samym nastąpiło wykali-browanie offsetu czujnika ciśnienia (przesunięciepunktu zerowego).
i) Gdy kalibracja jest zakończona, zapala się lampkasygnalizująca usterki. W przypadku usterek zapa-la się dodatkowo lampka ostrzegawcza.
j) Przez wyłączenie i ponowne włączenie zapłonumożna dokonać przełączenia na pracę normalną.Jeżeli kalibracja była nieprawidłowa, lampka syg-nalizująca usterki miga nadal. Jeżeli kalibracjabyła prawidłowa, lampka sygnalizująca usterkigaśnie. Lampka ostrzegawcza świeci się światłemciągłym (ponieważ poziom rzeczywisty odbiegajeszcze od poziomu normalnego).
28 �����
Algorytm regulacjiECAS7
2
Algorytm regulacji
Dla zrozumienia funkcji regulacyjnych ECAS należy za-poznać się ze zjawiskami fizycznymi zachodzącymiw pneumatycznym układzie zawieszenia.
Podstawowym problemem każdej regulacji jest to, że al-bo trzeba przyjąć długi czas regulacji, tzn. dłuższy czasmiędzy początkiem i zakończeniem procesu regulacji, al-bo istnieje niebezpieczeństwo przekroczenia wartościzadanej przy szybszej regulacji, wskutek czego możenastąpić przesterowanie albo przeregulowanie systemu.
Obrazowym przykładem jest duży grzejnik w małympomieszczeniu, który szybko je nagrzewa, jednak łatwopowoduje również przegrzanie (przeregulowanie), cze-mu trzeba znowu zapobiec przez wietrzenie pomiesz-czenia.
Dużą zaletą ECAS jest szybka regulacja poziomu. Zewzględu na duże średnice nominalne zaworów elektro-magnetycznych ECAS może się zdarzyć, że chociażzałącza zawór elektromagnetyczny bardzo szybko, domiecha zostanie doprowadzona za duża ilość powiet-rza, która w chwilę później spowoduje ustalenie sięwyższego poziomu niż był zakładany.
Dużą rolę przy szybkiej zmianie poziomu odgrywazwłaszcza działanie amortyzatora. Olej wewnątrz amor-tyzatora musi przepływać z jednej komory do drugiejprzez wąski otwór dławiący i to tym szybciej, im większajest prędkość ruchu, z jaką przy zmianie poziomu nad-wozie oddala się od osi. Dzięki temu uzyskuje się siłęprzeciwdziałającą przemieszczaniu, która zapobiegadrganiu nadwozia albo odskakiwaniu koła od jezdni.W ten sam sposób amortyzator przeciwdziała równieżzmianie poziomu.
Podczas postoju pojazdu siła amortyzatora powietrznegoodpowiada składowej ciężaru, która jest przenoszona nakoło. Siłę tę wywołuje ciśnienia w amortyzatorze powietrz-nym, przemnożone przez powierzchnię przekroju.Ciśnienie to jest w amortyzatorach cylindrycznych zależnejedynie od obciążenia, a nie od wysokości poziomu(wyjątek: obszar dolnego ogranicznika buforowego).
Jeżeli poziom ma zostać podwyższony, wówczas powie-trze zostaje wdmuchiwane do miecha. Następuje przytym podwyższenia ciśnienia w miechu, najpierw abyprzyspieszyć bezwładną masę nadwozia, a później abyprzezwyciężyć siłę tłumienia.
Jeżeli zawory elektromagnetyczne są zamknięte i zostałosiągnięty poziom zadany, wówczas powstaje niezrów-noważenie, spowodowane ciśnieniem, które było ko-nieczne do przezwyciężenia siły amortyzatora. Powie-trze w miechu rozpręża się, aż wartość ciśnienia po-mnożona przez powierzchnie miecha będzie znowu od-powiadała obciążeniu statycznemu. Dodatkowa obję-tość, powstająca wskutek tego rozprężania, podnosinadwozie powyżej poziomu zadanego.
Tego rodzaju przesterowanie występuje zwłaszcza przypustym pojeździe, ponieważ przy dużej różnicy ciśnieńmiędzy ciśnieniem w zasobniku i ciśnieniem w miechunastępuje bardzo szybkie wdmuchiwanie powietrza domiecha i dochodzi do dużych szybkości podnoszenia.Siła tłumienia jest bardzo duża w stosunku do ciężaru, copo zamknięciu zaworów elektromagnetycznych powodu-je odpowiednio dużą, nadmierną objętość miecha.
Przeregulowanie powyżej poziomu zadanego wywołujeregulację w kierunku przeciwnym. Jeżeli regulacja taznowu spowoduje przesterowanie, wówczas mogą wy-stąpić niekończące się wahania wokół poziomu zadane-go. Ten niekończący się cykl regulacji nie jest poprawnya także powoduje znaczne zredukowanie trwałości za-woru elektromagnetycznego.
Naturalnie regulacja w przeciwnym kierunku nie nastąpi,jeżeli poziom normalny nie będzie zachowany z mili-metrową dokładnością. Przeregulowanie w obszarzeszerokiego pasma tolerancji nie będzie prawie dostrze-gane przez ECU.
Jeżeli jednak żądane jest zachowanie dokładnego wy-miaru, wówczas proces regulacji musi zostać na tyle ule-pszony, aby już przed osiągnięciem poziomu zadanegonastąpiło zredukowanie doprowadzanej ilości powietrza.Prędkość podnoszenia zmniejsza się i przy optymalnymzastosowaniu następuje całkowite przerwanie procesuprzeregulowania.
Ponieważ zawór elektromagnetyczny może jedynie włą-czać albo wyłączać strumień powietrza, ale nie może godławić, więc następuje krótkotrwałe przerwanie stru-mienia powietrza przez pulsowanie prądu elektromag-nesu, co oddziałuje jak proces dławienia.
Obliczenie długości pulsowania przez ECU następujew zależności od różnicy między poziomem zadanymi poziomem rzeczywistym oraz w zależności od prędkoś-ci podnoszenia. Duży odcinek podnoszenia powodujewłączenie długich impulsów, ponieważ tutaj nie występu-je jeszcze niebezpieczeństwo przeregulowania, podczas
29�����
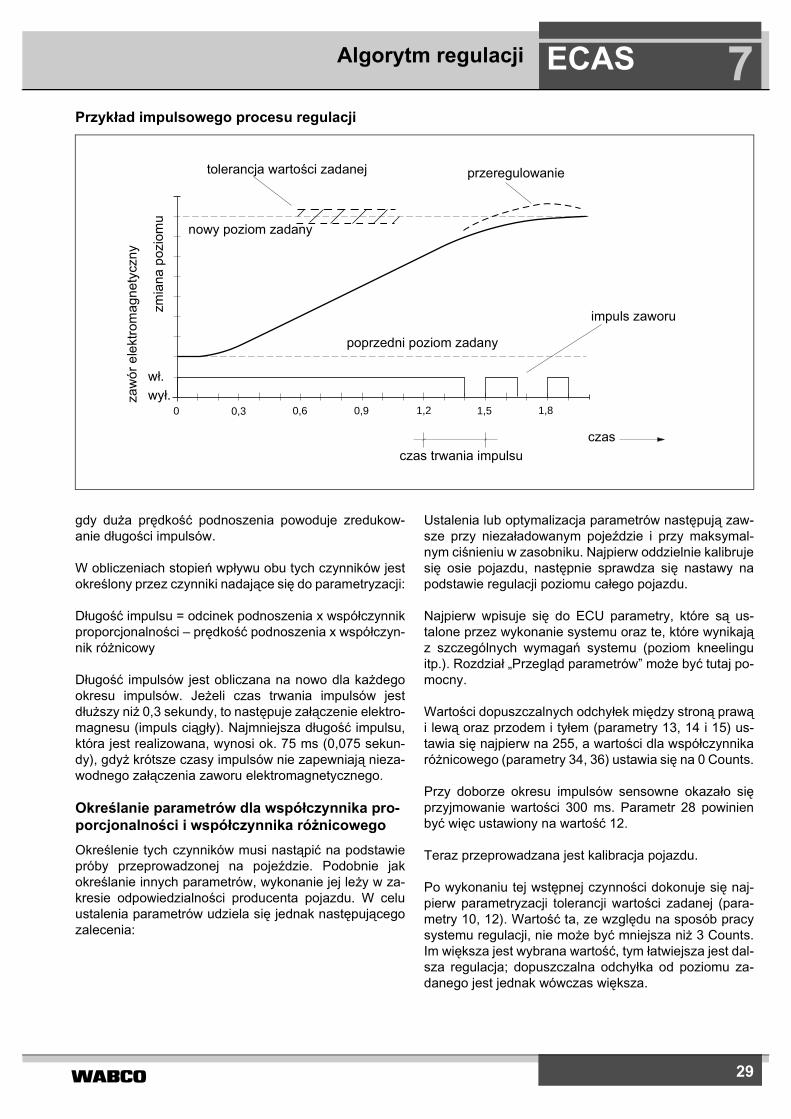
Przykład impulsowego procesu regulacji
Algorytm regulacji ECAS 7
gdy duża prędkość podnoszenia powoduje zredukow-anie długości impulsów.
W obliczeniach stopień wpływu obu tych czynników jestokreślony przez czynniki nadające się do parametryzacji:
Długość impulsu = odcinek podnoszenia x współczynnikproporcjonalności – prędkość podnoszenia x współczyn-nik różnicowy
Długość impulsów jest obliczana na nowo dla każdegookresu impulsów. Jeżeli czas trwania impulsów jestdłuższy niż 0,3 sekundy, to następuje załączenie elektro-magnesu (impuls ciągły). Najmniejsza długość impulsu,która jest realizowana, wynosi ok. 75 ms (0,075 sekun-dy), gdyż krótsze czasy impulsów nie zapewniają nieza-wodnego załączenia zaworu elektromagnetycznego.
Określanie parametrów dla współczynnika pro-porcjonalności i współczynnika różnicowegoOkreślenie tych czynników musi nastąpić na podstawiepróby przeprowadzonej na pojeździe. Podobnie jakokreślanie innych parametrów, wykonanie jej leży w za-kresie odpowiedzialności producenta pojazdu. W celuustalenia parametrów udziela się jednak następującegozalecenia:
Ustalenia lub optymalizacja parametrów następują zaw-sze przy niezaładowanym pojeździe i przy maksymal-nym ciśnieniu w zasobniku. Najpierw oddzielnie kalibrujesię osie pojazdu, następnie sprawdza się nastawy napodstawie regulacji poziomu całego pojazdu.
Najpierw wpisuje się do ECU parametry, które są us-talone przez wykonanie systemu oraz te, które wynikająz szczególnych wymagań systemu (poziom kneelinguitp.). Rozdział „Przegląd parametrów” może być tutaj po-mocny.
Wartości dopuszczalnych odchyłek między stroną prawąi lewą oraz przodem i tyłem (parametry 13, 14 i 15) us-tawia się najpierw na 255, a wartości dla współczynnikaróżnicowego (parametry 34, 36) ustawia się na 0 Counts.
Przy doborze okresu impulsów sensowne okazało sięprzyjmowanie wartości 300 ms. Parametr 28 powinienbyć więc ustawiony na wartość 12.
Teraz przeprowadzana jest kalibracja pojazdu.
Po wykonaniu tej wstępnej czynności dokonuje się naj-pierw parametryzacji tolerancji wartości zadanej (para-metry 10, 12). Wartość ta, ze względu na sposób pracysystemu regulacji, nie może być mniejsza niż 3 Counts.Im większa jest wybrana wartość, tym łatwiejsza jest dal-sza regulacja; dopuszczalna odchyłka od poziomu za-danego jest jednak wówczas większa.
0 0,3 0,6 0,9 1,2 1,5 1,8
tolerancja wartości zadanej przeregulowanie
impuls zaworu
poprzedni poziom zadany
czas trwania impulsuczas
wł.wył.
nowy poziom zadany
zaw
ór e
lekt
rom
agne
tycz
ny
zmia
na p
ozio
mu
30 �����
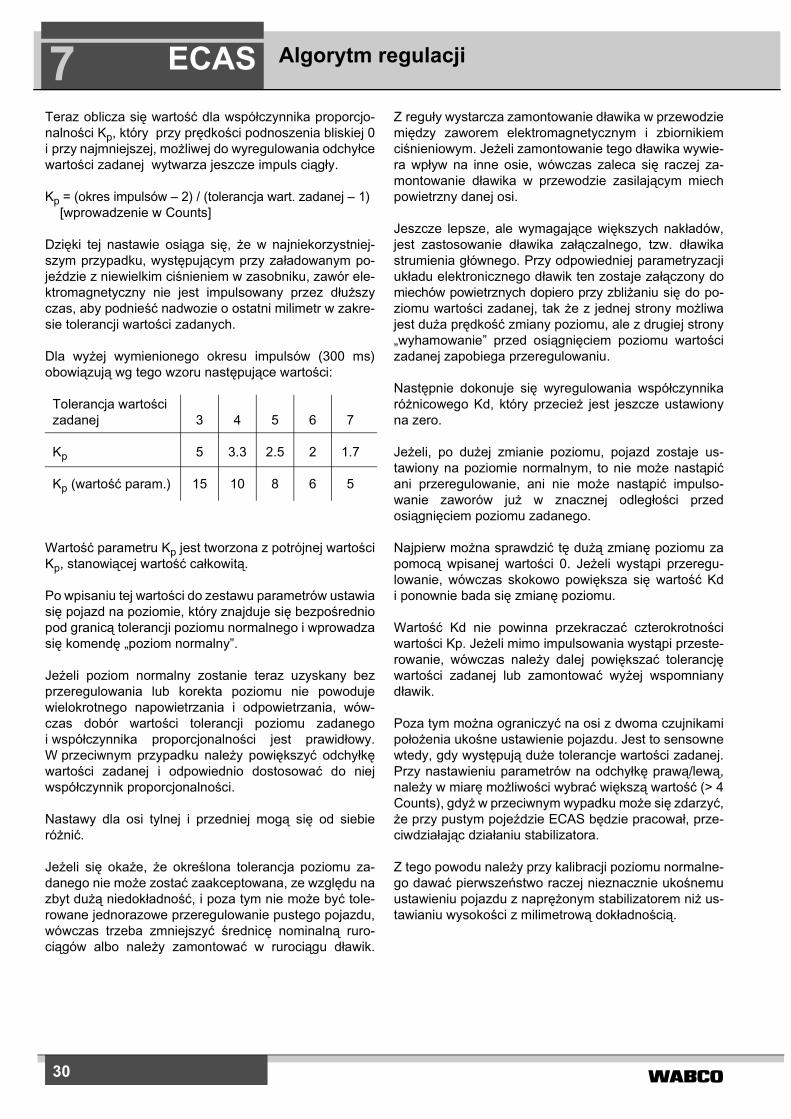
Algorytm regulacjiECAS7Teraz oblicza się wartość dla współczynnika proporcjo-nalności Kp, który przy prędkości podnoszenia bliskiej 0i przy najmniejszej, możliwej do wyregulowania odchyłcewartości zadanej wytwarza jeszcze impuls ciągły.
Kp = (okres impulsów – 2) / (tolerancja wart. zadanej – 1) [wprowadzenie w Counts]
Dzięki tej nastawie osiąga się, że w najniekorzystniej-szym przypadku, występującym przy załadowanym po-jeździe z niewielkim ciśnieniem w zasobniku, zawór ele-ktromagnetyczny nie jest impulsowany przez dłuższyczas, aby podnieść nadwozie o ostatni milimetr w zakre-sie tolerancji wartości zadanych.
Dla wyżej wymienionego okresu impulsów (300 ms)obowiązują wg tego wzoru następujące wartości:
Tolerancja wartości zadanej 3 4 5 6 7
Kp 5 3.3 2.5 2 1.7
Kp (wartość param.) 15 10 8 6 5
Wartość parametru Kp jest tworzona z potrójnej wartościKp, stanowiącej wartość całkowitą.
Po wpisaniu tej wartości do zestawu parametrów ustawiasię pojazd na poziomie, który znajduje się bezpośredniopod granicą tolerancji poziomu normalnego i wprowadzasię komendę „poziom normalny”.
Jeżeli poziom normalny zostanie teraz uzyskany bezprzeregulowania lub korekta poziomu nie powodujewielokrotnego napowietrzania i odpowietrzania, wów-czas dobór wartości tolerancji poziomu zadanegoi współczynnika proporcjonalności jest prawidłowy.W przeciwnym przypadku należy powiększyć odchyłkęwartości zadanej i odpowiednio dostosować do niejwspółczynnik proporcjonalności.
Nastawy dla osi tylnej i przedniej mogą się od siebieróżnić.
Jeżeli się okaże, że określona tolerancja poziomu za-danego nie może zostać zaakceptowana, ze względu nazbyt dużą niedokładność, i poza tym nie może być tole-rowane jednorazowe przeregulowanie pustego pojazdu,wówczas trzeba zmniejszyć średnicę nominalną ruro-ciągów albo należy zamontować w rurociągu dławik.
Z reguły wystarcza zamontowanie dławika w przewodziemiędzy zaworem elektromagnetycznym i zbiornikiemciśnieniowym. Jeżeli zamontowanie tego dławika wywie-ra wpływ na inne osie, wówczas zaleca się raczej za-montowanie dławika w przewodzie zasilającym miechpowietrzny danej osi.
Jeszcze lepsze, ale wymagające większych nakładów,jest zastosowanie dławika załączalnego, tzw. dławikastrumienia głównego. Przy odpowiedniej parametryzacjiukładu elektronicznego dławik ten zostaje załączony domiechów powietrznych dopiero przy zbliżaniu się do po-ziomu wartości zadanej, tak że z jednej strony możliwajest duża prędkość zmiany poziomu, ale z drugiej strony„wyhamowanie” przed osiągnięciem poziomu wartościzadanej zapobiega przeregulowaniu.
Następnie dokonuje się wyregulowania współczynnikaróżnicowego Kd, który przecież jest jeszcze ustawionyna zero.
Jeżeli, po dużej zmianie poziomu, pojazd zostaje us-tawiony na poziomie normalnym, to nie może nastąpićani przeregulowanie, ani nie może nastąpić impulso-wanie zaworów już w znacznej odległości przedosiągnięciem poziomu zadanego.
Najpierw można sprawdzić tę dużą zmianę poziomu zapomocą wpisanej wartości 0. Jeżeli wystąpi przeregu-lowanie, wówczas skokowo powiększa się wartość Kdi ponownie bada się zmianę poziomu.
Wartość Kd nie powinna przekraczać czterokrotnościwartości Kp. Jeżeli mimo impulsowania wystąpi przeste-rowanie, wówczas należy dalej powiększać tolerancjęwartości zadanej lub zamontować wyżej wspomnianydławik.
Poza tym można ograniczyć na osi z dwoma czujnikamipołożenia ukośne ustawienie pojazdu. Jest to sensownewtedy, gdy występują duże tolerancje wartości zadanej.Przy nastawieniu parametrów na odchyłkę prawą/lewą,należy w miarę możliwości wybrać większą wartość (> 4Counts), gdyż w przeciwnym wypadku może się zdarzyć,że przy pustym pojeździe ECAS będzie pracował, prze-ciwdziałając działaniu stabilizatora.
Z tego powodu należy przy kalibracji poziomu normalne-go dawać pierwszeństwo raczej nieznacznie ukośnemuustawieniu pojazdu z naprężonym stabilizatorem niż us-tawianiu wysokości z milimetrową dokładnością.
31�����
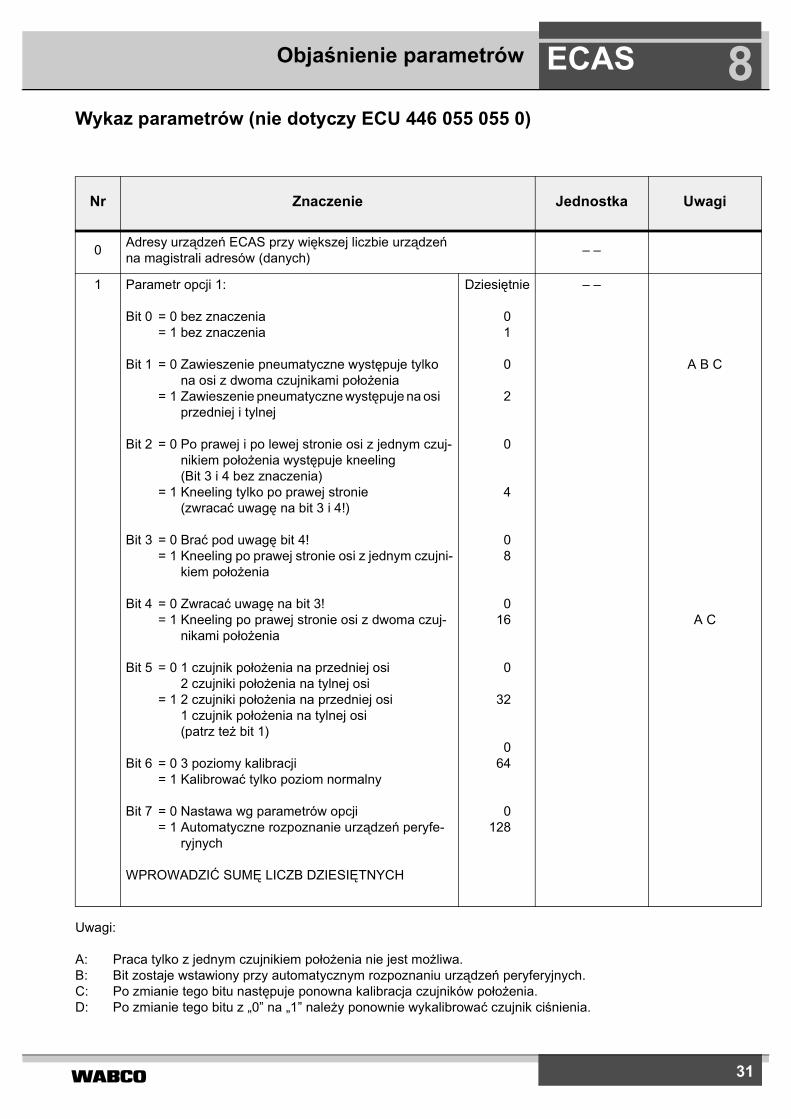
Wykaz parametrów (nie dotyczy ECU 446 055 055 0)
Objaśnienie parametrów ECAS 8
Nr Znaczenie Jednostka Uwagi
0 Adresy urządzeń ECAS przy większej liczbie urządzeńna magistrali adresów (danych) – –
1 Parametr opcji 1:
Bit 0 = 0 bez znaczenia= 1 bez znaczenia
Bit 1 = 0 Zawieszenie pneumatyczne występuje tylko na osi z dwoma czujnikami położenia
= 1 Zawieszenie pneumatyczne występuje na osi przedniej i tylnej
Bit 2 = 0 Po prawej i po lewej stronie osi z jednym czuj-nikiem położenia występuje kneeling(Bit 3 i 4 bez znaczenia)
= 1 Kneeling tylko po prawej stronie(zwracać uwagę na bit 3 i 4!)
Bit 3 = 0 Brać pod uwagę bit 4!= 1 Kneeling po prawej stronie osi z jednym czujni-
kiem położenia
Bit 4 = 0 Zwracać uwagę na bit 3!= 1 Kneeling po prawej stronie osi z dwoma czuj-
nikami położenia
Bit 5 = 0 1 czujnik położenia na przedniej osi2 czujniki położenia na tylnej osi
= 1 2 czujniki położenia na przedniej osi1 czujnik położenia na tylnej osi(patrz też bit 1)
Bit 6 = 0 3 poziomy kalibracji= 1 Kalibrować tylko poziom normalny
Bit 7 = 0 Nastawa wg parametrów opcji= 1 Automatyczne rozpoznanie urządzeń peryfe-
ryjnych
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
01
0
2
0
4
08
016
0
32
064
0128
– –
A B C
A C
Uwagi:
A: Praca tylko z jednym czujnikiem położenia nie jest możliwa.B: Bit zostaje wstawiony przy automatycznym rozpoznaniu urządzeń peryferyjnych.C: Po zmianie tego bitu następuje ponowna kalibracja czujników położenia.D: Po zmianie tego bitu z „0” na „1” należy ponownie wykalibrować czujnik ciśnienia.
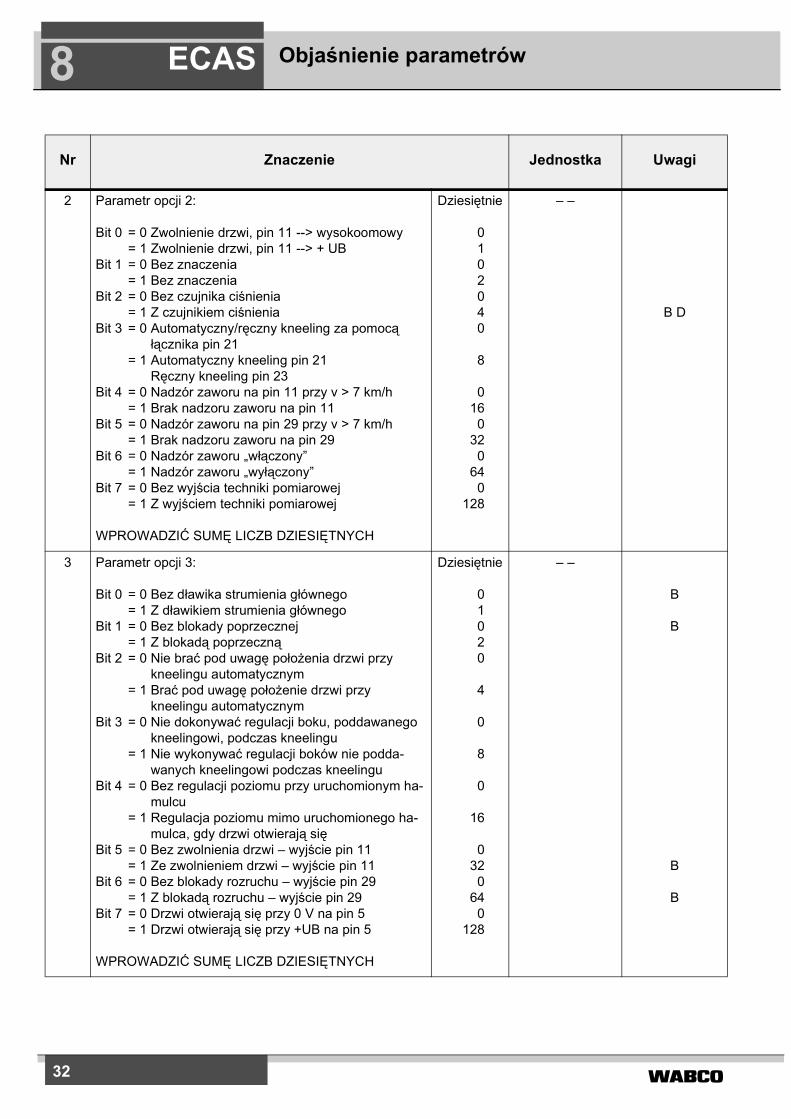
32 �����
Objaśnienie parametrówECAS8Nr Znaczenie Jednostka Uwagi
2 Parametr opcji 2:
Bit 0 = 0 Zwolnienie drzwi, pin 11 --> wysokoomowy= 1 Zwolnienie drzwi, pin 11 --> + UB
Bit 1 = 0 Bez znaczenia= 1 Bez znaczenia
Bit 2 = 0 Bez czujnika ciśnienia= 1 Z czujnikiem ciśnienia
Bit 3 = 0 Automatyczny/ręczny kneeling za pomocą łącznika pin 21
= 1 Automatyczny kneeling pin 21Ręczny kneeling pin 23
Bit 4 = 0 Nadzór zaworu na pin 11 przy v > 7 km/h= 1 Brak nadzoru zaworu na pin 11
Bit 5 = 0 Nadzór zaworu na pin 29 przy v > 7 km/h= 1 Brak nadzoru zaworu na pin 29
Bit 6 = 0 Nadzór zaworu „włączony”= 1 Nadzór zaworu „wyłączony”
Bit 7 = 0 Bez wyjścia techniki pomiarowej= 1 Z wyjściem techniki pomiarowej
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
0102040
8
0160
320
640
128
– –
B D
3 Parametr opcji 3:
Bit 0 = 0 Bez dławika strumienia głównego= 1 Z dławikiem strumienia głównego
Bit 1 = 0 Bez blokady poprzecznej= 1 Z blokadą poprzeczną
Bit 2 = 0 Nie brać pod uwagę położenia drzwi przy kneelingu automatycznym
= 1 Brać pod uwagę położenie drzwi przy kneelingu automatycznym
Bit 3 = 0 Nie dokonywać regulacji boku, poddawanego kneelingowi, podczas kneelingu
= 1 Nie wykonywać regulacji boków nie podda-wanych kneelingowi podczas kneelingu
Bit 4 = 0 Bez regulacji poziomu przy uruchomionym ha-mulcu
= 1 Regulacja poziomu mimo uruchomionego ha-mulca, gdy drzwi otwierają się
Bit 5 = 0 Bez zwolnienia drzwi – wyjście pin 11= 1 Ze zwolnieniem drzwi – wyjście pin 11
Bit 6 = 0 Bez blokady rozruchu – wyjście pin 29= 1 Z blokadą rozruchu – wyjście pin 29
Bit 7 = 0 Drzwi otwierają się przy 0 V na pin 5= 1 Drzwi otwierają się przy +UB na pin 5
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
01020
4
0
8
0
16
0320
640
128
– –
B
B
B
B
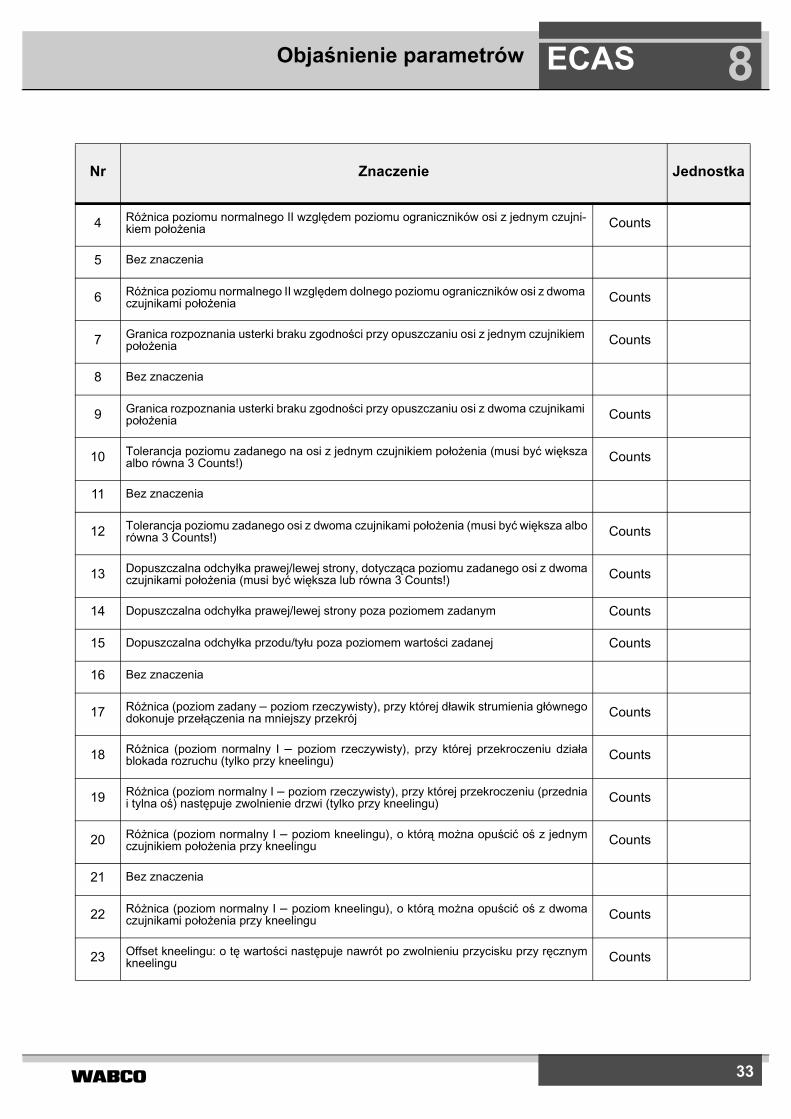
33�����
Nr Znaczenie Jednostka
4 Różnica poziomu normalnego II względem poziomu ograniczników osi z jednym czujni-kiem położenia Counts
5 Bez znaczenia
6 Różnica poziomu normalnego II względem dolnego poziomu ograniczników osi z dwoma czujnikami położenia Counts
7 Granica rozpoznania usterki braku zgodności przy opuszczaniu osi z jednym czujnikiem położenia Counts
8 Bez znaczenia
9 Granica rozpoznania usterki braku zgodności przy opuszczaniu osi z dwoma czujnikami położenia Counts
10 Tolerancja poziomu zadanego na osi z jednym czujnikiem położenia (musi być większaalbo równa 3 Counts!) Counts
11 Bez znaczenia
12 Tolerancja poziomu zadanego osi z dwoma czujnikami położenia (musi być większa alborówna 3 Counts!) Counts
13 Dopuszczalna odchyłka prawej/lewej strony, dotycząca poziomu zadanego osi z dwomaczujnikami położenia (musi być większa lub równa 3 Counts!) Counts
14 Dopuszczalna odchyłka prawej/lewej strony poza poziomem zadanym Counts
15 Dopuszczalna odchyłka przodu/tyłu poza poziomem wartości zadanej Counts
16 Bez znaczenia
17 Różnica (poziom zadany – poziom rzeczywisty), przy której dławik strumienia głównegodokonuje przełączenia na mniejszy przekrój Counts
18 Różnica (poziom normalny I – poziom rzeczywisty), przy której przekroczeniu działablokada rozruchu (tylko przy kneelingu) Counts
19 Różnica (poziom normalny I – poziom rzeczywisty), przy której przekroczeniu (przedniai tylna oś) następuje zwolnienie drzwi (tylko przy kneelingu) Counts
20 Różnica (poziom normalny I – poziom kneelingu), o którą można opuścić oś z jednymczujnikiem położenia przy kneelingu Counts
21 Bez znaczenia
22 Różnica (poziom normalny I – poziom kneelingu), o którą można opuścić oś z dwomaczujnikami położenia przy kneelingu Counts
23 Offset kneelingu: o tę wartości następuje nawrót po zwolnieniu przycisku przy ręcznymkneelingu Counts
Objaśnienie parametrów ECAS 8
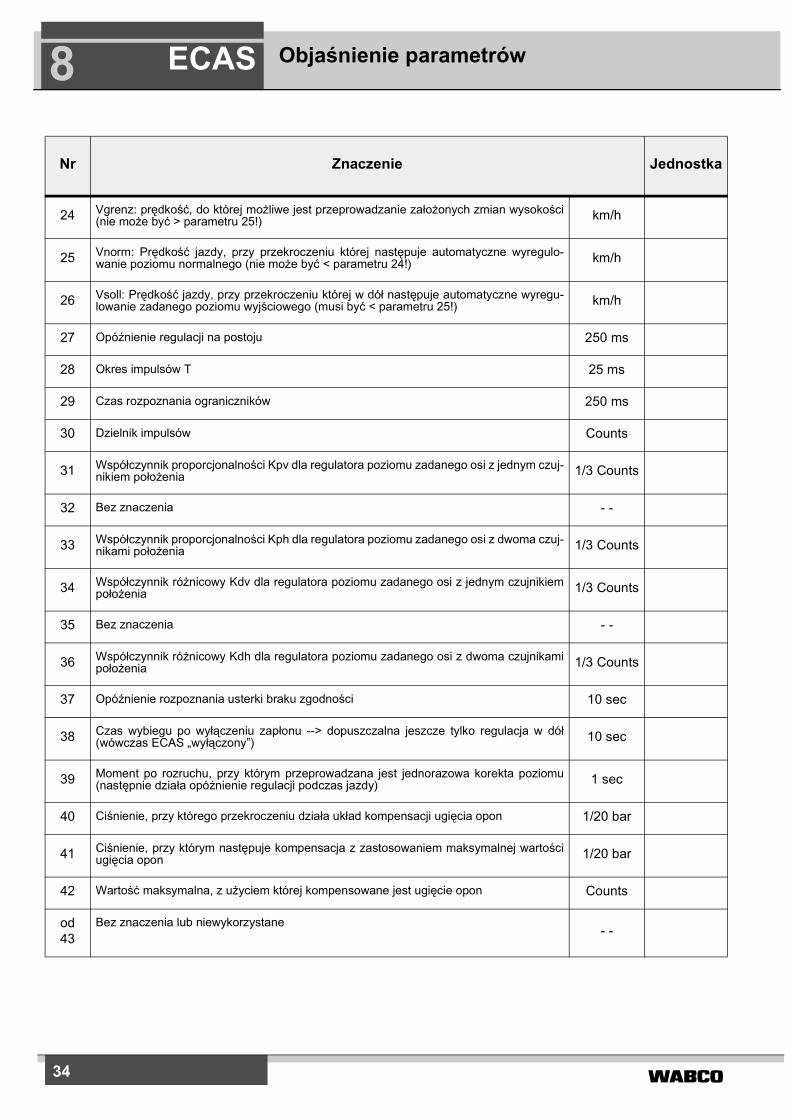
34 �����
Nr Znaczenie Jednostka
24 Vgrenz: prędkość, do której możliwe jest przeprowadzanie założonych zmian wysokości(nie może być > parametru 25!) km/h
25 Vnorm: Prędkość jazdy, przy przekroczeniu której następuje automatyczne wyregulo-wanie poziomu normalnego (nie może być < parametru 24!) km/h
26 Vsoll: Prędkość jazdy, przy przekroczeniu której w dół następuje automatyczne wyregu-lowanie zadanego poziomu wyjściowego (musi być < parametru 25!) km/h
27 Opóźnienie regulacji na postoju 250 ms
28 Okres impulsów T 25 ms
29 Czas rozpoznania ograniczników 250 ms
30 Dzielnik impulsów Counts
31 Współczynnik proporcjonalności Kpv dla regulatora poziomu zadanego osi z jednym czuj-nikiem położenia 1/3 Counts
32 Bez znaczenia - -
33 Współczynnik proporcjonalności Kph dla regulatora poziomu zadanego osi z dwoma czuj-nikami położenia 1/3 Counts
34 Współczynnik różnicowy Kdv dla regulatora poziomu zadanego osi z jednym czujnikiempołożenia 1/3 Counts
35 Bez znaczenia - -
36 Współczynnik różnicowy Kdh dla regulatora poziomu zadanego osi z dwoma czujnikamipołożenia 1/3 Counts
37 Opóźnienie rozpoznania usterki braku zgodności 10 sec
38 Czas wybiegu po wyłączeniu zapłonu --> dopuszczalna jeszcze tylko regulacja w dół(wówczas ECAS „wyłączony”) 10 sec
39 Moment po rozruchu, przy którym przeprowadzana jest jednorazowa korekta poziomu(następnie działa opóźnienie regulacji podczas jazdy) 1 sec
40 Ciśnienie, przy którego przekroczeniu działa układ kompensacji ugięcia opon 1/20 bar
41 Ciśnienie, przy którym następuje kompensacja z zastosowaniem maksymalnej wartościugięcia opon 1/20 bar
42 Wartość maksymalna, z użyciem której kompensowane jest ugięcie opon Counts
od43
Bez znaczenia lub niewykorzystane - -
Objaśnienie parametrówECAS8
35�����
Objaśnienie parametrów ECAS 8Poniżej wyszczególnione są poszczególne parametryz krótkim opisem ich funkcji. Ustalenie zestawu para-metrów przy uruchamianiu oraz późniejsza zmianaposzczególnych parametrów pojazdu jest zadaniem pro-ducenta pojazdu.
CountsCounts są wartościami zliczanymi przez układ elektro-niczny. Wartości zmierzone przez czujniki odnoszą sięwprawdzie do odległości albo ciśnień, są jednak przeka-zywane do ECU jako wartości napięcia albo impulsyprądowe.
Chcąc pracować (liczyć) przy wykorzystaniu tych syg-nałów, ECU formuje z nich wartości liczbowe, tzw.Counts. Szerokość pasma wartości napięcia lub czasuimpulsów, leżących w zakresie pomiarowym, zostajew tym celu podzielona na równe części, a częściom tymzostają każdorazowo przyporządkowane wartości licz-bowe. Im mniejsze są te części, tym dokładniej udostęp-nianie są wartości pomiarowe dla celów obliczeniowych,jednak odpowiednio więcej potrzeba wówczas miejscw pamięci, aby zarządzać tymi wartościami pomiarowymi.
Dla ECAS wystarcza rozdzielczość 256 części, tzn. war-tości napięcia „0 Volt” jest przykładowo przyporządko-wana wartość Counts „0”, wartości napięcia „24 V” (jakomaksymalnej możliwej wartości) – wartość Counts „255”,a zakresowi między 0 a 24 V – pozostałe 254 wartościCounts.
To, że z reguły wybiera się 256 części, wynika z efekty-wnego wykorzystania użytych pamięci, które są opartena systemie binarnym (dwójkowym).
Pamięci te mogą przyjmować jedynie informacjew postaci „tak” albo „nie” lub „0” albo „1”. Przy zastosow-aniu 8 takich członów dla jednej wielkości pomiarowejotrzymuje się dokładnie 256 możliwych kombinacjipołożeń tak/nie – a więc właśnie wartości Counts „0” do„255”.
W obszarze „0” do „255” zarządza się nie tylko wartoś-ciami czujników, ale również wartościami nastawczymi(parametrami).
W przypadkach, w których trzeba nastawić nie „ile” lecztylko „tak/nie” w jakiejś opcji, łączy się do 8 takich opcjiw jeden parametr. Każdemu rozstrzygnięciu „1” albo „0”przyporządkowuje się mnożnik (1;2;4;8;16;32;64;128),a następnie odpowiedź na pytanie „kneeling osi z jednymczujnikiem położenia” jest udzielana przez wartość „4” al-bo „0” lub „jeden albo trzy poziomy kalibracji”, przez „64”albo „0”. Suma wszystkich 8, pojedynczych rozstrzygnięćprzyjmuje wówczas wartość liczbową pomiędzy 0 i 255.
Parametry opcjiParametry jeden, dwa i trzy definiują zakres systemu. Sąone każdorazowo złożone z ośmiu informacji tak/nie.
Parametr 0 (0*)Parametr 0 stanowi adres urządzenia, za pomocą które-go kontrolny układ diagnostyczny nawiązuje kontaktz układem elektronicznym. Standardowo nastawia siędla elektroniki autobusu adres 16. Jeżeli jednak, jak np.w autobusie przegubowym, podłącza się do kontrolnegoukładu diagnostycznego dwa układy elektroniczne,wówczas dla układu elektronicznego końcowego członunadaje się w tym parametrze adres 17. W ten sposóbmożna przeprowadzać w zróżnicowany sposób diagno-stykę żądanego układu elektronicznego za pomocą kon-trolnego układu diagnostycznego.
Parametr 1 (1*)Bit 0: Jest ustawiany na „0”. Ustawienie „1” nie ma żad-nego znaczenia.
Bit 1: Zawieszenie pneumatyczne na osi przednieji tylnej
Jeżeli autobus posiada pneumatyczne zawieszenie osiprzedniej i tylnej, które ma być regulowane za pomocąECAS, wówczas trzeba bit ten ustawić na „1”. Jeżeli (jaknp. w członie końcowym autobusu przegubowego) mabyć regulowana tylko jedna oś, wówczas wpisuje się „0”.Ta jedna oś musi dysponować dwoma czujnikami poło-żenia.
Bit 2: Kneeling osi z jednym czujnikiem położenia
Istnieje możliwość wyboru między kneelingiem całej osi(po lewej i po prawej stronie), jednej strony pojazdu, albokneelingiem tylko jednego boku jednej osi.
Jeżeli oś ma zostać opuszczona po stronie leweji prawej, wówczas wchodzi tutaj w rachubę tylko ta oś,która jest wyposażona w jeden czujnik położenia (naj-częściej przednia oś). Bit 2 należy ustawi na „0”.
Jeżeli pojazd miałby zostać opuszczony po stronieprawej, wówczas dla bitu 2 wstawia się wartość „1”.Wówczas obowiązujące jest ustawienie wg bitu 3 i 4.
Bit 3 i 4: Kneeling prawej strony
Zależnie od ustawienia bitu 3 i 4 możliwe są następująceformy kneelingu na osi z jednym czujnikiem położenia(1WSA, z reguły oś przednia) i na osi z dwoma czujnika-mi położenia (2WSA, z reguły oś tylna).
36 �����
Objaśnienie parametrówECAS8
Autobusy z drzwiami po lewej stronie pojazduNa ogół mówi się tylko o kneelingu prawostronnym, gdyżnajczęściej pojazdy są wyposażone dla potrzeb ruchuprawostronnego. Oczywiście pojazd może pochylać sięrównież po lewej stronie, jeśli zarówno czujniki położe-nia, jak i zawory elektromagnetyczne będą po każdejstronie podłączone odwrotnie. Tak np. czujnik położenialewego boku pojazdu zostanie podłączany nie do pin 25(czujnik położenia 2WSA po stronie lewej) lecz do pin 8(czujnik położenia 2WSA po stronie prawej), prawy czu-jnik odpowiednio do pin 25. Odpowiednio trzeba postę-pować z zaworami elektromagnetycznymi obu osi.
Bit 5: Rozmieszczenia czujników położenia
W celu prawidłowego przyporządkowania czujnikówpołożenia zaworom elektromagnetycznym, trzeba poin-formować układ elektroniczny, za pośrednictwem bit 5,o położeniu czujników położenia:
Jeżeli 2WSA jest osią tylną, a 1WSA – osią przednią,wówczas trzeba ustawić bit 5 na „0”, a w przeciwnym wy-padku na „1”.
Jeżeli regulowana będzie tylko jedna oś (z dwoma czu-jnikami położenia), wówczas bit 5 musi informować,gdzie ta oś się znajduje: „0” dla tyłu i „1” dla przodu.
Bit 6: Liczba poziomów kalibracji
Jeżeli wprowadzi się tutaj wartość „0”, wówczas ECUoczekuje przy procesie kalibracji trzech poziomów, po-ziomu normalnego I oraz najwyższego i najniższegopoziomu przewidzianego do wysterowania.
Jeżeli wartość ustawi się na „1”, wówczas kalibrowanyjest tylko poziom normalny. Przed dokonaniem kalibracjitego poziomu trzeba jednak wprowadzić za pomocą kon-trolnego układu diagnostycznego oba inne poziomy czuj-ników położenia w formie wartości Counts.
Bit 7: Automatyczne rozpoznanie urządzeń peryfe-ryjnych
Jeżeli ustawi się bit 7 na „1”, wówczas ECU sprawdzaprzed kalibracją przyłącza elektryczne i na tej podstawiewyciąga wniosek o wykonanej konfiguracji systemu.Odpowiednio ustawia się potem automatycznie te para-metry, które opisują konfigurację. Jeżeli ustawia się bit 7= „0”, wówczas obowiązujące są opcje wg wstępnychzałożeń wprowadzonego zestawu parametrów.
Parametr 2 (2*)Bit 0: Wyjście zwolnienia drzwi
Przy rozpoczynaniu ruchu kneelingu nie mogą być (wgprzepisów niemieckich) otwarte żadne drzwi pojazdu.Dlatego podczas kneelingu oraz przy podnoszeniui opuszczaniu następuje zablokowanie układu sterow-ania drzwi przez pin 11 w ECAS – ECU i następnieponowne zwolnienie go.
Po ustawieniu bitu 0 następuje zwolnienie albo przez do-prowadzenie prądu do pin 11 (zmiana ze stanu bez-prądowego na +Ub - bit 0 = „1”) albo przez przerwaniezasilania prądem (zmiana z +Ub na stan bezprądowy –bit 0 = „0”). Maksymalne obciążenie pinu prądem możewynosić do 500 mA.
W ECU …050 0 następuje zwolnienie drzwi zasadniczoprzez zmianę +Ub na stan bezprądowy, inne ustawienienie jest możliwe. Bit 0 nie ma w związku z tym żadnejfunkcji i powinien być ustawiony na „0”.
Bit 1: Bez funkcji
Ustawienie tego bitu nie ma żadnego wpływu na działa-nie, jednak dla lepszej przejrzystości powinna być wpisa-na wartość „0”.
Bit 2: System z czujnikiem ciśnienia
Jeżeli instalacja posiada czujnik ciśnienia, aby np. mócdokonywać kompensacji ugięcia opon, wówczas należywstawić bit 2 = „1”, w przeciwnym wypadku = „0”.
Dla ECU446 055 050 0 nie przewidziano podłączeniaczujnika ciśnienia. Ustawienie bit 2 nie ma więc znacze-nia. Dla przejrzystości zestawu parametrów należy war-tość tę ustawić na „0”.
Bit 3: Kneeling ręczny/automatyczny
Proces kneelingu może zostać wprowadzony prze krót-kie naciśnięcie przycisku (automatycznie) albo przezdługie naciśnięcie przycisku (ręcznie), towarzyszącecałemu procesowi opuszczania.
Bit 3 Bit 4
Kneeling tylko po prawejstronie 1WSA 1 0 1 0
Kneeling tylko po prawejstronie 2WSA 0 1
Kneeling prawego bokuna obu osiach
01
01
37�����
Objaśnienie parametrów ECAS 8Różnicę między tymi dwoma typami kneelingu stanowikryterium bezpieczeństwa: przy kneelingu ręcznym wy-starcza, że kierowca, w przypadku rozpoznania jakiegośniebezpieczeństwa. zwolni przycisk kneelingu (pin 23),aby przerwać proces opuszczania.
Dla przerwania opuszczania podczas kneelingu automa-tycznego konieczne jest naciśnięcie przycisku stop albozałączenie listwy zabezpieczającej („czujnik krawężni-ka”), znajdującej się pod wejściem.
Aby umożliwić kierowcy dokonanie swobodnego wyborumiędzy tymi dwoma formami kneelingu, w bit 3 są możli-we następujące opcje:
Bit 3 = „0”. Za pośrednictwem łącznika podłączonego dopin 21 dokonuje się wyboru między kneelingiem auto-matycznym i ręcznym. Przycisk na pin 23 wykonujewstępnie wybrany proces kneelingu. Zamiast łącznikamożna oczywiście również wykonać trwałą, wstępnąnastawę przy użyciu mostka kablowego na pin 21.
Bit 3 = „1”. Można np. zamontować dwa przyciski w de-sce rozdzielczej. Przycisk dla kneelingu automatycznegozostaje podłączony do pin 21, a drugi – dla przeprowa-dzania kneelingu ręcznego – do pin 23.
Bit 4: Nadzorowanie zaworu na pin 11
Jeżeli ustawi się bit 4 na „0”, wówczas nadzoruje siępołączenie z zaworem albo przekaźnikiem zwalnianiadrzwi, podłączonym do pin 11, pod kątem przerwy, zwar-cia do masy i zwarcia do + Ub. Dodatkowo trzeba jednakwłączać ogólny układ nadzoru zaworów (bit 6 = „0”).
Jeżeli bit 4 = „1”, wówczas nie jest dokonywany nadzórtego wyjścia i tym samym nie jest również dokonywanywpis do pamięci usterek (jeżeli np. zostanie spowodow-ana przerwa przez wyłącznik awaryjny).
Bit 5: Nadzorowanie zaworu na pin 29
Jeżeli bit 5 zostanie ustawiony na „0”, wówczas następu-je nadzorowanie zaworu albo przekaźnika, podłączone-go do pin 29, służącego do blokady rozruchu, pod kątemprzerwy, zwarcia do masy i zwarcia do +Ub. Dodatkowotrzeba jednak włączać ogólny układ nadzoru zaworów(bit 6 = „0”).
Jeżeli bit 5 = „1”, wówczas nie jest wykonywany nadzórtego wyjścia i tym samym nie jest dokonywany równieżwpis do pamięci usterek (jeżeli np. zostanie dokonanaprzerwa za pomocą wyłącznika awaryjnego).
W ECU …051 0 nadzór tych wyjść jest dokonywany za-sadniczo tylko przy prędkościach powyżej 7 km/h, dlate-go zewnętrzne połączenie na postoju nie spowodujeżadnych usterek.
Bit 6: Nadzór zaworów elektromagnetycznych
Jeżeli bit 6 zostanie ustawiony na „0”, wówczas następu-je nadzór podłączonych zaworów elektromagnetycznych
nad sterowaniem miechami powietrznymi oraz zaworówdo sterowania zwolnieniem drzwi i blokadą rozruchu, uz-godnionych odpowiednio do bitów 4 i 5, pod kątemprzerwy, zwarcia do masy i zwarcia do +Ub.
Jeżeli bit 6 zostanie ustawiony na „1”, wówczas nie nas-tępuje nadzór zaworów elektromagnetycznych i tymsamym nie nastąpi wpis do pamięci usterek w przypadkuwystąpienia usterki.
Bit 7: Wyjście wartości pomiarowych
Jeżeli bit 7 zostanie ustawiony na „1”, wówczas ECUwysyła podczas normalnej pracy zawsze 8 wartości po-miarowych, obliczonych z wartości czujników. Punkty po-miarowe są ustalone odpowiednio do poniższegoprzyporządkowania:
1 Wartość rzeczywista czujnika położenia 2WSAlewego
2 Wartość rzeczywista czujnika położenia 2WSAprawego
3 Wartość rzeczywista czujnika położenia 1WSA
4 Wartość rzeczywista czujnika ciśnienia
5 Wartość zadana poziomu 2WSA lewego
6 Wartość zadana poziomu 2WSA prawego
7 Wartość zadana poziomu 1WSA
8 Aktualna prędkość pojazdu
Wartości pomiarowe 1 do 7 są podawane w Counts,natomiast prędkość jest podawana w km/h.
Wartości poziomu zadanego są podawane odpowiedniodo wartości założonej dla kompensacji ugięcia opon.Dlatego przy wstępnie wybranej wartości zadanej, „po-ziom normalny 1” i przy załadowanym pojeździe zostajewysłana wartość wyższa niż wykalibrowana, jeżeli uz-godniona jest kompensacja ugięcia opon.
Jeżeli system nie posiada jednego z punktów pomia-rowych (np. punkt pomiarowy 3 w instalacjach z tylkojedną regulowaną osią), wówczas podawana jest war-tość „0” albo „255”.
Wyjście wartości pomiarowych może zostać zastosowa-ne tylko podczas ustalania parametrów. Ponieważ układelektroniczny wciąż wysyła dane, więc w przeciwnymwypadku nie można dokonywać diagnostyki za pomocąkarty programowej 446 300 528 2.
Na zakończenie parametryzacji trzeba ustawić bit 7 na„0”.
38 �����
Objaśnienie parametrówECAS8Parametr 3 (3*)Bit 0: Sterowanie dławikiem strumienia głównego
Dla zapobieżenia przeregulowaniu poza żądany poziom,przy regulacji poziomu, można dodatkowo, oprócz uz-godnień na temat opisanych parametrów regulacyjnychw rozdziale „algorytm regulacji”, sterować dławikiemstrumienia głównego.
Dławik ten, między zaworem napowietrzającym i ro-zdzielaczami 2/2 poszczególnych amortyzatorów po-wietrznych, może zostać przestawiony za pomocą elek-tromagnesu z położenia spoczynkowego (duży przekrój)w położenie dławienia (np. f 2).
Jeżeli bit 0 zostanie ustawiony na „1”, wówczas po zbli-żeniu do poziomu zadanego, zdefiniowanego przez pa-rametr 17, następuje aktywowanie położenia dławienia,aby umożliwić już tylko powolną zmianę poziomu.
Jeżeli ma nie być stosowany dławik strumienia główne-go, wówczas należy ustawić bit 0 na „0”.
Bit 1: Załączalny dławik poprzeczny na 1WSA
Zasadniczo obowiązuje zasada, że na osi, na której znaj-duje się tylko jeden czujnik położenia, oba amortyzatorypowietrzne powinny zostać ze sobą połączone co naj-mniej przez dławik poprzeczny. Dzięki temu umożliwiasię, również wtedy, gdy zawory elektromagnetyczne sązamknięte, powolne wyrównywanie ciśnienia międzymiechami i tym samym zapobiega się ukośnemu usta-wieniu pojazdu, spowodowanemu różnymi ciśnieniami.
Jeżeli jednak autobus miałby być poddawany jedno-stronnemu kneelingowi, wówczas ciśnienie po tej stroniemusi zostać obniżone. W tym momencie trzeba zapobiecwyrównywaniu ciśnienia między miechami. Dławik po-przeczny musi być w czasie wykonywania kneelingu za-blokowany przez zawór elektromagnetyczny.
Przy bit 1 = „1” następuje uzgodnienie dławika poprzecz-nego na pin 18 ECU. Tak długo, jak długo działa knee-ling, następuje w tym przypadku bezprądowe załączaniepin 18, w innym przypadku do pin 18 jest podłączone+Ub.
Jeżeli nie jest zamontowany dławik poprzeczny, należyustawić bit 1 na „0”.
Bit 2: Stan drzwi przy kneelingu
Wg przepisów niemieckich, podczas uruchomieniakneelingu drzwi nie mogą być otwarte.
Stan drzwi zostaje sprawdzony przez wejście sygnaliza-cyjne ECU (pin 5), o ile bit 2 = „1”. Przy otwartych drzwiach
nie jest wówczas wykonywany automatycznie włączanykneeling albo komenda podnoszenia/opusz-czania.
W autobusach eksploatowanych za granicą można tęfunkcję wyłączyć: jeżeli ustawi się bit 2 na „0”, wówczasmożna wykonywać kneeling automatyczny także przyotwartych drzwiach. Jeżeli włączy się kneeling ręcznymimo otwartych drzwi, wówczas może to zostać wyko-nane za pomocą prostych środków: parametr 3, bit 7 us-tawia się na „0” i wejście załączające dla stanu drzwi, pin5, pozostaje niepołączone.
Bit 3: Regulacja lewego boku w położeniu kneelingu
Zależnie od punktu połączenia przegubowego lewegoczujnika położenia i od przekazywania siły przez stabili-zator osi, przechylanie prawego boku może równieżspowodować utworzenie innego poziomu na lewym bokupojazdu, chociaż ilość powietrza w lewych miechach niezostała zmieniona.
Za pomocą bit 3 można teraz nastawić opcję, czy po-ziom, który powstanie po lewej stronie pojazdu, w wynikuprocesu kneelingu, ma zostać zachowany, dopóki po-jazd znajduje się w pozycji kneelingu.
Jeżeli bit 3 zostanie ustawiony na „0”, wówczasw położeniu kneelingu nie następuje regulacja.
Jeżeli bit 3 zostanie ustawiony na „1”, wówczas dopieropo podniesieniu prawego boku do poziomu normalnegonastępuje regulacja lewego boku (o ile jest konieczna).
To samo dotyczy drugiej osi, jeżeli kneeling jest wykony-wany osiami.
Bit 4: Regulacja poziomu przy uruchomionym ha-mulcu
Normalnie ECAS nie wykonuje regulacji przy uruchomio-nym hamulcu, ponieważ różnica poziomów, powstającawskutek zahamowania nie musi być wyregulowana:
Przemieszczenie obciążeń osi, występujące podczashamowania, powoduje przecież tylko krótkotrwałe ob-niżenie pojazdu, a w następnym momencie jest samo-czynie ponownie przyjmowany poprzedni poziom. Jeżelijednak w momencie pochylania się nastąpiłoby dopro-wadzenie powietrza do przednich miechów, wówczaspóźniej trzeba by je znowu odpowietrzać.
Inna sytuacja występuje jednak na przystanku. Tutaj po-jazd jest wprawdzie zabezpieczony hamulcem przedstoczeniem się, ale wskutek zmiany obciążenia (wysia-danie albo wsiadanie pasażerów) rzeczywiście koniecz-na jest regulacja poziomu.
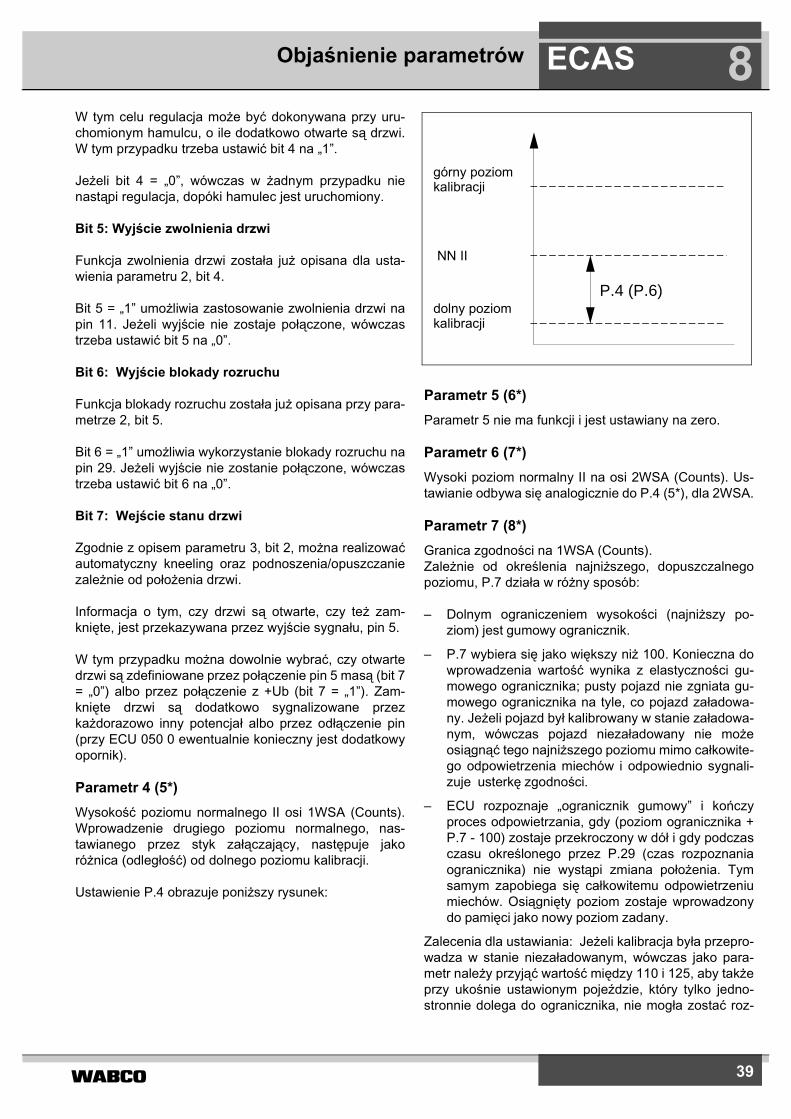
39�����
Objaśnienie parametrów ECAS 8W tym celu regulacja może być dokonywana przy uru-chomionym hamulcu, o ile dodatkowo otwarte są drzwi.W tym przypadku trzeba ustawić bit 4 na „1”.
Jeżeli bit 4 = „0”, wówczas w żadnym przypadku nienastąpi regulacja, dopóki hamulec jest uruchomiony.
Bit 5: Wyjście zwolnienia drzwi
Funkcja zwolnienia drzwi została już opisana dla usta-wienia parametru 2, bit 4.
Bit 5 = „1” umożliwia zastosowanie zwolnienia drzwi napin 11. Jeżeli wyjście nie zostaje połączone, wówczastrzeba ustawić bit 5 na „0”.
Bit 6: Wyjście blokady rozruchu
Funkcja blokady rozruchu została już opisana przy para-metrze 2, bit 5.
Bit 6 = „1” umożliwia wykorzystanie blokady rozruchu napin 29. Jeżeli wyjście nie zostanie połączone, wówczastrzeba ustawić bit 6 na „0”.
Bit 7: Wejście stanu drzwi
Zgodnie z opisem parametru 3, bit 2, można realizowaćautomatyczny kneeling oraz podnoszenia/opuszczaniezależnie od położenia drzwi.
Informacja o tym, czy drzwi są otwarte, czy też zam-knięte, jest przekazywana przez wyjście sygnału, pin 5.
W tym przypadku można dowolnie wybrać, czy otwartedrzwi są zdefiniowane przez połączenie pin 5 masą (bit 7= „0”) albo przez połączenie z +Ub (bit 7 = „1”). Zam-knięte drzwi są dodatkowo sygnalizowane przezkażdorazowo inny potencjał albo przez odłączenie pin(przy ECU 050 0 ewentualnie konieczny jest dodatkowyopornik).
Parametr 4 (5*)Wysokość poziomu normalnego II osi 1WSA (Counts).Wprowadzenie drugiego poziomu normalnego, nas-tawianego przez styk załączający, następuje jakoróżnica (odległość) od dolnego poziomu kalibracji.
Ustawienie P.4 obrazuje poniższy rysunek:
Parametr 5 (6*)Parametr 5 nie ma funkcji i jest ustawiany na zero.
Parametr 6 (7*)Wysoki poziom normalny II na osi 2WSA (Counts). Us-tawianie odbywa się analogicznie do P.4 (5*), dla 2WSA.
Parametr 7 (8*)Granica zgodności na 1WSA (Counts).Zależnie od określenia najniższego, dopuszczalnegopoziomu, P.7 działa w różny sposób:
– Dolnym ograniczeniem wysokości (najniższy po-ziom) jest gumowy ogranicznik.
– P.7 wybiera się jako większy niż 100. Konieczna dowprowadzenia wartość wynika z elastyczności gu-mowego ogranicznika; pusty pojazd nie zgniata gu-mowego ogranicznika na tyle, co pojazd załadowa-ny. Jeżeli pojazd był kalibrowany w stanie załadowa-nym, wówczas pojazd niezaładowany nie możeosiągnąć tego najniższego poziomu mimo całkowite-go odpowietrzenia miechów i odpowiednio sygnali-zuje usterkę zgodności.
– ECU rozpoznaje „ogranicznik gumowy” i kończyproces odpowietrzania, gdy (poziom ogranicznika +P.7 - 100) zostaje przekroczony w dół i gdy podczasczasu określonego przez P.29 (czas rozpoznaniaogranicznika) nie wystąpi zmiana położenia. Tymsamym zapobiega się całkowitemu odpowietrzeniumiechów. Osiągnięty poziom zostaje wprowadzonydo pamięci jako nowy poziom zadany.
Zalecenia dla ustawiania: Jeżeli kalibracja była przepro-wadza w stanie niezaładowanym, wówczas jako para-metr należy przyjąć wartość między 110 i 125, aby takżeprzy ukośnie ustawionym pojeździe, który tylko jedno-stronnie dolega do ogranicznika, nie mogła zostać roz-
P.4 (P.6)
górny poziomkalibracji
NN II
dolny poziomkalibracji
40 �����
Objaśnienie parametrówECAS8poznana usterka zgodności. Jeżeli pojazd został wykali-browany w stanie załadowanym, wówczas sensownajest wartość między 120 i 135.
– Najniższy poziom znajduje się powyżej gumowegoogranicznika.
– Jeżeli dolne ograniczenie wysokości znajduje siępowyżej gumowego ogranicznika, wówczas informu-je o tym wartość P.7 poniżej 100. W tym przypadkuautobus może zostać opuszczony tylko do wykali-browanego, dolnego poziomu.
– Jeżeli nadwozie, ze względu na nierówne podłoże,osiądzie mimo to na ograniczniku powyżej tego po-ziomu, wówczas obowiązuje co następuje: procesodpowietrzania zostaje zakończony, gdy poziom ka-libracji + P.7 został przekroczony w dół i nie nastąpiłajuż zmiana położenia w czasie określonym w P.29(czas rozpoznawania ogranicznika). Ponieważz reguły problemy zgodności są możliwe tylko przyznacznym, ukośnym ustawieniu pojazdu, więc zale-ca się ustawienie między 5 i 20, zależnie ododległości między ogranicznikami kalibracyjnymi.
Jeżeli powyżej granicy utworzonej przez P.7 i poziomograniczników nie zaobserwuje się zmiany położeniaw dół podczas 30 sekund procesu opuszczania (co naj-mniej 1 Counts), wówczas ECU rozpozna usterkę zgod-ności. Szczególnie w przypadku autobusu z prawo-stronnym kneelingiem trzeba zwracać uwagę na to, abystabilizator osi mógł utrudniać dostateczne obniżenia.Jeżeli wybiera się parametr poziom kneelingu = ogranicz-nik oporowy, a ogranicznik jednak nie zostanie osiągnię-ty, wówczas dla ECU powstaje usterka zgodności.
Poza tym czujnik położenia na 2WSA, który nie jestumieszczony bezpośrednio na kole, nie rozpozna przybocznym kneelingu najniższego poziomu, chociaż zosta-nie osiągnięty ogranicznik oporowy. Podczas gdy przykalibracji autobusu na ograniczniku, oś i nadwozie znaj-dują się względem siebie równolegle, to przy kneelingusą one względem siebie ustawione pod kątem. Jeżeliczujnik położenia jest zamontowany bardziej w kierunkuśrodka osi, wówczas wartość podawana przez czujnikprzy kneelingu znajduje się w zakresie między pozio-mem normalnym i poziomem najniższym.
Pomóc może tutaj tylko zwiększona granica zgodności albowybranie wyższego poziomu kneelingu, co może zostaćodczytane za pomocą wyjścia wartości pomiarowych.
Parametr 8 (9*)Parametr 8 (9*) nie ma żadnej funkcji i jest ustawiany nazero.
Parametr 9 (10*)Granica zgodności na 2WSA (Counts).Analogicznie do P.7 (8*) dla 2 WSA.
Parametr 10 (11*)Tolerancja poziomu zadanego na 1WSA (Counts).Ustawienie tego parametru określa, wraz ze współczyn-nikami proporcjonalności i różnicy, jakość regulacji sys-temu na przedniej osi. Patrz rozdział „Algorytmregulacji”.
Parametr 11 (12*)Parametr 11 nie ma żadnej funkcji i ustawia się go na zero.
Parametr 12 (13*)Tolerancja poziomu zadanego na 2WSA (Counts).Odpowiada parametrowi 10 (11*) dla 2WSA.
Parametr 13 (14*)Dopuszczalna odchyłka prawej/lewej strony na poziomienormalnym (Counts).Parametr ten działa na 2WSA. Określa on dopuszczalne,ukośne ustawienie nadwozia, przy np. nierównym rozło-żeniu obciążenia na obu bokach.
Wartości większe niż 2 x P.12 nie są sensowne i zostająsamoczynnie ograniczone przez ECU do 2 x P.12.
Parametr 14 (15*)Dopuszczalna odchyłka prawej/lewej strony w procesiepodnoszenia/opuszczania (Counts).W odróżnieniu od P.13 (14*) proces regulacji nie odbywasię w obszarze wokół poziomu zadanego, ale podczaswiększych zmian poziomu. Przy jednostronnie załado-wanym pojeździe strona mniej obciążona będzie siępodnosiła szybciej niż druga (lub strona bardziej ob-ciążona będzie się szybciej opuszczała) i tym samymmożliwe jest spowodowanie, niepożądanego, ukośnegoustawienia przy zmianie poziomu. Przez impulsowanieodpowiedniego miecha uzyskuje się bardziej równo-mierne podnoszenie/opuszczanie.
Długość impulsu jest określona dzielnikiem impulsuokreślonym w P.30 (31*).
Parametr 15 (16*)Dopuszczalna odchyłka przodu/tyłu w procesie pod-noszenia/opuszczania (Counts).Zmiana poziomu pojazdu, posiadającego dwie osie o za-wieszeniu pneumatycznym, powinna z reguły odbywaćsię w taki sposób, że nadwozie osiągnie z przodu i z tyłużądany, nowy poziom zadany mniej więcej w tym samymczasie. Oś, odbywająca krótszą drogę do osiągnięcia
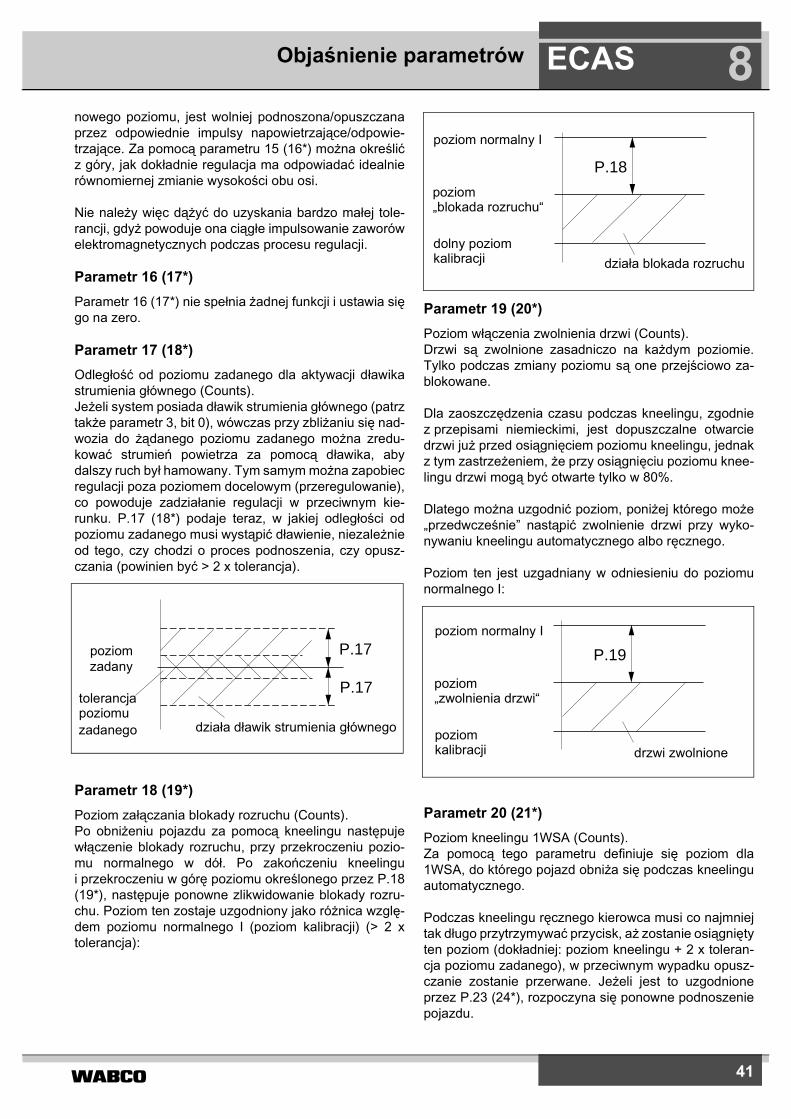
41�����
Objaśnienie parametrów ECAS 8nowego poziomu, jest wolniej podnoszona/opuszczanaprzez odpowiednie impulsy napowietrzające/odpowie-trzające. Za pomocą parametru 15 (16*) można określićz góry, jak dokładnie regulacja ma odpowiadać idealnierównomiernej zmianie wysokości obu osi.
Nie należy więc dążyć do uzyskania bardzo małej tole-rancji, gdyż powoduje ona ciągłe impulsowanie zaworówelektromagnetycznych podczas procesu regulacji.
Parametr 16 (17*)Parametr 16 (17*) nie spełnia żadnej funkcji i ustawia sięgo na zero.
Parametr 17 (18*)Odległość od poziomu zadanego dla aktywacji dławikastrumienia głównego (Counts).Jeżeli system posiada dławik strumienia głównego (patrztakże parametr 3, bit 0), wówczas przy zbliżaniu się nad-wozia do żądanego poziomu zadanego można zredu-kować strumień powietrza za pomocą dławika, abydalszy ruch był hamowany. Tym samym można zapobiecregulacji poza poziomem docelowym (przeregulowanie),co powoduje zadziałanie regulacji w przeciwnym kie-runku. P.17 (18*) podaje teraz, w jakiej odległości odpoziomu zadanego musi wystąpić dławienie, niezależnieod tego, czy chodzi o proces podnoszenia, czy opusz-czania (powinien być > 2 x tolerancja).
Parametr 18 (19*)Poziom załączania blokady rozruchu (Counts). Po obniżeniu pojazdu za pomocą kneelingu następujewłączenie blokady rozruchu, przy przekroczeniu pozio-mu normalnego w dół. Po zakończeniu kneelingui przekroczeniu w górę poziomu określonego przez P.18(19*), następuje ponowne zlikwidowanie blokady rozru-chu. Poziom ten zostaje uzgodniony jako różnica wzglę-dem poziomu normalnego I (poziom kalibracji) (> 2 xtolerancja):
Parametr 19 (20*)Poziom włączenia zwolnienia drzwi (Counts).Drzwi są zwolnione zasadniczo na każdym poziomie.Tylko podczas zmiany poziomu są one przejściowo za-blokowane.
Dla zaoszczędzenia czasu podczas kneelingu, zgodniez przepisami niemieckimi, jest dopuszczalne otwarciedrzwi już przed osiągnięciem poziomu kneelingu, jednakz tym zastrzeżeniem, że przy osiągnięciu poziomu knee-lingu drzwi mogą być otwarte tylko w 80%.
Dlatego można uzgodnić poziom, poniżej którego może„przedwcześnie” nastąpić zwolnienie drzwi przy wyko-nywaniu kneelingu automatycznego albo ręcznego.
Poziom ten jest uzgadniany w odniesieniu do poziomunormalnego I:
Parametr 20 (21*)Poziom kneelingu 1WSA (Counts).Za pomocą tego parametru definiuje się poziom dla1WSA, do którego pojazd obniża się podczas kneelinguautomatycznego.
Podczas kneelingu ręcznego kierowca musi co najmniejtak długo przytrzymywać przycisk, aż zostanie osiągniętyten poziom (dokładniej: poziom kneelingu + 2 x toleran-cja poziomu zadanego), w przeciwnym wypadku opusz-czanie zostanie przerwane. Jeżeli jest to uzgodnioneprzez P.23 (24*), rozpoczyna się ponowne podnoszeniepojazdu.
P.17
P.17
działa dławik strumienia głównego
zadany
tolerancjapoziomu
poziom
zadanego
P.18
działa blokada rozruchu
poziom normalny I
poziom„blokada rozruchu“
dolny poziomkalibracji
P.19
drzwi zwolnione
poziom normalny I
poziom„zwolnienia drzwi“
poziomkalibracji
42 �����
Objaśnienie parametrówECAS8W ECU…051 0, zapala się po osiągnięciu tego poziomu(+ 2 x tolerancja) lampka sygnalizacyjna „poziom knee-lingu osiągnięty”.
Ustawienie tego poziomu następuje analogicznie do pa-rametrów 18 i 19, w odniesieniu do poziomu normalnego I.
Parametr 21(22*)Parametr 21 (22*) nie posiada żadnej funkcji i jest us-tawiany na zero.
Parametr 22 (23*)Poziom kneelingu 2WSA (Counts).Analogicznie P.20 (21*) dla 2WSA.
Parametr 23 (24*)Działanie nawrotne po przerwaniu kneelingu (Counts).Jeżeli podczas kneelingu ręcznego przycisk zostaniezwolniony przed osiągnięciem poziomu kneelingu, wów-czas następuje natychmiastowe przerwanie obniżania,a następnie rozpoczyna się ruch w górę, o odcinek ustal-ony przez P.23 (24*). Proces nawrotny, poza poziomnormalny I, jest wykonywany tylko do poziomu normal-nego II.
Parametr 24 (25*)Prędkość jazdy, do której przyjmowane są komendypodnoszenia/opuszczania (km/h).Za pomocą tego parametru można ustawić, do jakiejprędkości kierowca może dokonywać zmian wysokościpoziomu.
Największa prędkość, do której kierowca może zmieniaćwysokość jazdy, jest prędkością określoną w parametrze25 (26*).
Maksymalna prędkość, do której można zażądaćkneelingu, jest ustalona na 5 km/h.
Parametr 25 (26*)Automatyczny poziom normalny (km/h).Ze względów bezpieczeństwa może być konieczne, abyprzy większych prędkościach można było jechać tylkoz poziomem normalnym. Za pomocą P.25 (26*) możnaokreślić granicę prędkości, powyżej której następuje au-tomatyczne wyregulowanie na wstępnie wybrany poziomnormalny.
Wartość dla P.25 (26*) musi być większa niż wartośćP.24 (25*) i większa niż 0 km/h!
Parametr 26 (27*)Automatyczny powrót do poprzedniego poziomu za-danego (km/h).
Zasadniczo poniżej prędkości określonej przez P.25(26*) nie powinien następować bezpośredni powrót dopoziomu zadanego, który był aktualny poprzednio,tj. przed przekroczeniem granicy prędkości P.25 (26*).W tym przypadku następowałaby ciągła regulacja przyprędkości jazdy wokół tej granicy (np. jazda w kolumnie).
Bardziej sensowne jest ustalenie drugiej granicy pręd-kości, w pewnej odległość od P.25 (26*), poniżej którejnastępowałby ponowny powrót do poprzedniego pozio-mu zadanego.
Ta druga granica prędkości może zostać zdefiniowanadowolnie, jednak bezwzględnie musi znajdować się po-niżej wartości P.25 (26*).
Jeżeli nie należy ponownie wracać do poprzedniego po-ziomu zadanego, ale nadal ma pozostać aktualny poziomnormalny, wówczas ustawia się P.26 (27*) na zero.
Parametr 27 (28*)Opóźnienie regulacji na postoju (w 250 ms).Jako bardziej sensowną wartość opóźnienia regulacjina postoju wybiera się najczęściej jedną sekundę(4 Counts). To opóźnienie regulacji pozwala na wystą-pienie fazy uspokojenia po każdym procesie regulacji.Wtedy może ustawić się ostateczny poziom, zanim np.znowu rozpocznie się regulacja w kierunku przeciwnym.
Parametr 28 (29*)Okres trwania impulsu (25 ms). Działanie okresu impulsów jest opisane w rozdziale „Al-gorytm regulacji”. Bardziej sensowną wartością dla P.28(29*) jest 300 ms. Odpowiednio należy wprowadzić 12Counts.
Parametr 29 (30*)Czas rozpoznania ograniczników (w 250 ms).Czas rozpoznania ograniczników powinien wynosić < 30sekund (poniżej 120 Counts), aby uniknąć powstaniausterki zgodności. Patrz parametr 7 (8*).
Parametr 30 (31*)Dzielnik impulsów (Counts).Patrz P.14 (15*). Opisuje udział czasu w okresie,w którym następuje impulsowanie miecha szybciejporuszającej się strony pojazdu. Czasy impulsowaniaponiżej 75 ms nie są realizowane.
Jeżeli zostanie wprowadzona np. wartość „255”, wów-czas zawór elektromagnetyczny po szybciej poru-szającej się stronie pozostaje tak długo zamknięty,aż nadwozie znajdzie się ponownie w tolerancji zgodnejz P.14 (15*).
43�����
Objaśnienie parametrów ECAS 8Parametr 31 (32*)Współczynnik proporcjonalności Kp dla 1WSA (1/3Counts).Ustawienie regulatora poziomu jest opisane w rozdziale„Algorytm regulacji”.
Parametr 32 (33*)P.32 (33*) nie spełnia żadnej funkcji i jest ustawiany nazero.
Parametr 33 (34*)Współczynnik proporcjonalności Kp dla 2WSA (1/3Counts).Ustawienie regulatora poziomu jest opisane w rozdziale„Algorytm regulacji”.
Parametr 34 (35*)Współczynnik różnicy Kd dla 1WSA (1/3 Counts). Ustawienie regulatora poziomu jest opisane w rozdziale„Algorytm regulacji”.
Parametr 35 (36*)P.35 (36*) nie spełnia żadnej funkcji i jest ustawiany nazero.
Parametr 36 (37*)Współczynnik różnicy Kd dla 2WSA (1/3 Counts).Ustawienie regulatora poziomu jest opisane w rozdziale„Algorytm regulacji”.
Parametr 37 (38*)Opóźnienie rozpoznania usterki zgodności (w 10 se-kund).Jeżeli ECAS ma wykonać zmianę poziomu bezpośredniopo rozruchu silnika, wówczas z powodu niedostateczne-go ciśnienia w zasobniku może wystąpić usterka zgod-ności. Może ona zostać na tyle opóźniona przez P.37(38*), aż sprężarka dostarczy dostateczne ilości powiet-rza dla prawidłowego wykonania tej funkcji.
Przed upływem czasu opóźnienia zostaje zakończonyprawostronny kneeling, przez jednoczesne wyregulowa-nie lewego i prawego boku. Wprawdzie rzadko zdarzasię to w praktyce, jednak może to wystąpić podczas testufunkcji kneelingu (częste włączanie i wyłączanie zapło-nu), przez kołysanie poprzeczne lub silne przeregulowa-nie.
Parametr 38 (39*)Czas wybiegu po wyłączeniu zapłonu (10 sekund). Można sobie wyobrazić, że po osiągnięciu celu jazdynastąpi wyłączenie silnika, zanim pasażerowie wysiedli.
Ponieważ jednak ECAS pracuje tylko z włączonymzapłonem, więc poziom podwyższy się wówczas, po-nieważ nie występuje żadna regulacja przeciwstawna.
Za pomocą P.38 (39*) można uzgodnić czas wybiegu,w którym ECAS reaguje na podwyższenie poziomu i za-chodzi odpowietrzanie.
Inne regulacje, niż związane z odpowietrzaniem, niebędą wykonywane, mimo ustawionego parametru P.38(39*).
Parametr 39 (40*)Opóźnienie regulacji zgodnie z jazdą (w 1 sekundzie).Gdy ECU ustali prędkość jazdy pojazdu, wówczaswystąpi opóźnienie regulacji wynoszące 60 sekund, abyzapobiec rozregulowaniu spowodowanemu nierówno-ścią jezdni.
Może to być jednak wadą po przyjechaniu na przystanek,gdy
– zatoka przystanku posiada nierówne podłoże i po-jazd przed rozpoczęciem jazdy stał krzywo, zostałzabezpieczony przed stoczeniem się za pomocą ha-mulca podstawowego i dlatego podczas postoju niebyła wykonywana korekta poziomu,
– przy zastosowaniu wejścia „hamulec” świadomienależy zapobiec regulacji podczas otwartych drzwi,aby uniknąć niebezpieczeństwa potknięcia się nakrawędzi stopnia zmieniającego swoją wysokość.
W każdym z wymienionych przypadków autobus mógłbyposiadać przy rozpoczęciu jazdy niekorzystny poziom,który mógłby zostać skompensowany dopiero 60 sekundpóźniej.
Po upływie czasu zdefiniowanego przez P.39 jestwykonywana jednorazowo następna korekta poziomu,na równej jezdni po opuszczeniu przystanku (rozpoczę-ciu jazdy). Dopiero potem ponownie zaczyna działaćopóźnienie regulacji stosowane podczas jazdy.
Uwaga: Przy zastosowaniu tego parametru trzeba wziąćpod uwagę, że pojazd w momencie regulacji mógłby aku-rat pokonywać zakręt i wówczas wyregulowywanebyłoby pochylenie na zakręcie.
Poniższe parametry nie posiadają w ECU…050 0 żadnejfunkcji, ponieważ ten układ elektroniczny nie posiadakompensacji ugięcia opon. Wartości poniższych para-metrów należy dlatego ustawić na zero.
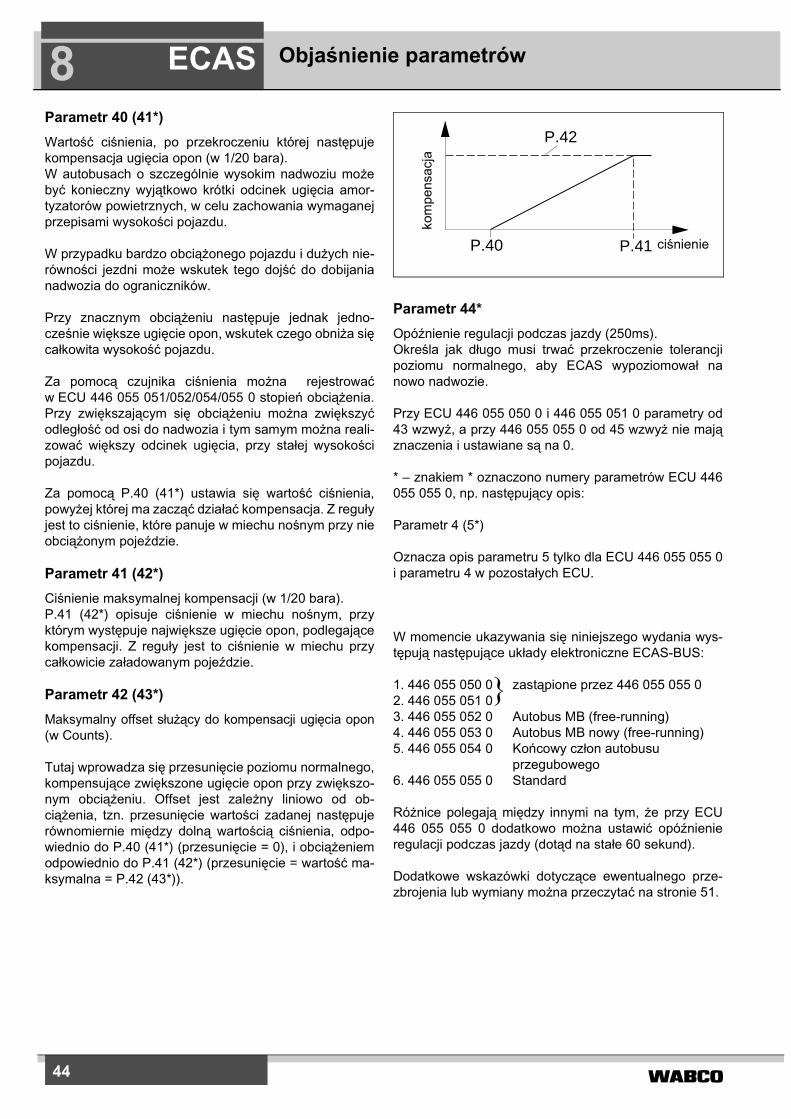
44 �����
Objaśnienie parametrówECAS8Parametr 40 (41*)Wartość ciśnienia, po przekroczeniu której następujekompensacja ugięcia opon (w 1/20 bara).W autobusach o szczególnie wysokim nadwoziu możebyć konieczny wyjątkowo krótki odcinek ugięcia amor-tyzatorów powietrznych, w celu zachowania wymaganejprzepisami wysokości pojazdu.
W przypadku bardzo obciążonego pojazdu i dużych nie-równości jezdni może wskutek tego dojść do dobijanianadwozia do ograniczników.
Przy znacznym obciążeniu następuje jednak jedno-cześnie większe ugięcie opon, wskutek czego obniża sięcałkowita wysokość pojazdu.
Za pomocą czujnika ciśnienia można rejestrowaćw ECU 446 055 051/052/054/055 0 stopień obciążenia.Przy zwiększającym się obciążeniu można zwiększyćodległość od osi do nadwozia i tym samym można reali-zować większy odcinek ugięcia, przy stałej wysokościpojazdu.
Za pomocą P.40 (41*) ustawia się wartość ciśnienia,powyżej której ma zacząć działać kompensacja. Z regułyjest to ciśnienie, które panuje w miechu nośnym przy nieobciążonym pojeździe.
Parametr 41 (42*)Ciśnienie maksymalnej kompensacji (w 1/20 bara).P.41 (42*) opisuje ciśnienie w miechu nośnym, przyktórym występuje największe ugięcie opon, podlegającekompensacji. Z reguły jest to ciśnienie w miechu przycałkowicie załadowanym pojeździe.
Parametr 42 (43*)Maksymalny offset służący do kompensacji ugięcia opon(w Counts).
Tutaj wprowadza się przesunięcie poziomu normalnego,kompensujące zwiększone ugięcie opon przy zwiększo-nym obciążeniu. Offset jest zależny liniowo od ob-ciążenia, tzn. przesunięcie wartości zadanej następujerównomiernie między dolną wartością ciśnienia, odpo-wiednio do P.40 (41*) (przesunięcie = 0), i obciążeniemodpowiednio do P.41 (42*) (przesunięcie = wartość ma-ksymalna = P.42 (43*)).
Parametr 44* Opóźnienie regulacji podczas jazdy (250ms). Określa jak długo musi trwać przekroczenie tolerancjipoziomu normalnego, aby ECAS wypoziomował nanowo nadwozie.
Przy ECU 446 055 050 0 i 446 055 051 0 parametry od43 wzwyż, a przy 446 055 055 0 od 45 wzwyż nie mająznaczenia i ustawiane są na 0.
* – znakiem * oznaczono numery parametrów ECU 446055 055 0, np. następujący opis:
Parametr 4 (5*)
Oznacza opis parametru 5 tylko dla ECU 446 055 055 0i parametru 4 w pozostałych ECU.
W momencie ukazywania się niniejszego wydania wys-tępują następujące układy elektroniczne ECAS-BUS:
1. 446 055 050 0 zastąpione przez 446 055 055 02. 446 055 051 0 3. 446 055 052 0 Autobus MB (free-running)4. 446 055 053 0 Autobus MB nowy (free-running)5. 446 055 054 0 Końcowy człon autobusu
przegubowego6. 446 055 055 0 Standard
Różnice polegają między innymi na tym, że przy ECU446 055 055 0 dodatkowo można ustawić opóźnienieregulacji podczas jazdy (dotąd na stałe 60 sekund).
Dodatkowe wskazówki dotyczące ewentualnego prze-zbrojenia lub wymiany można przeczytać na stronie 51.
}
P.40
P.42
P.41 ciśnienie
kom
pens
acja
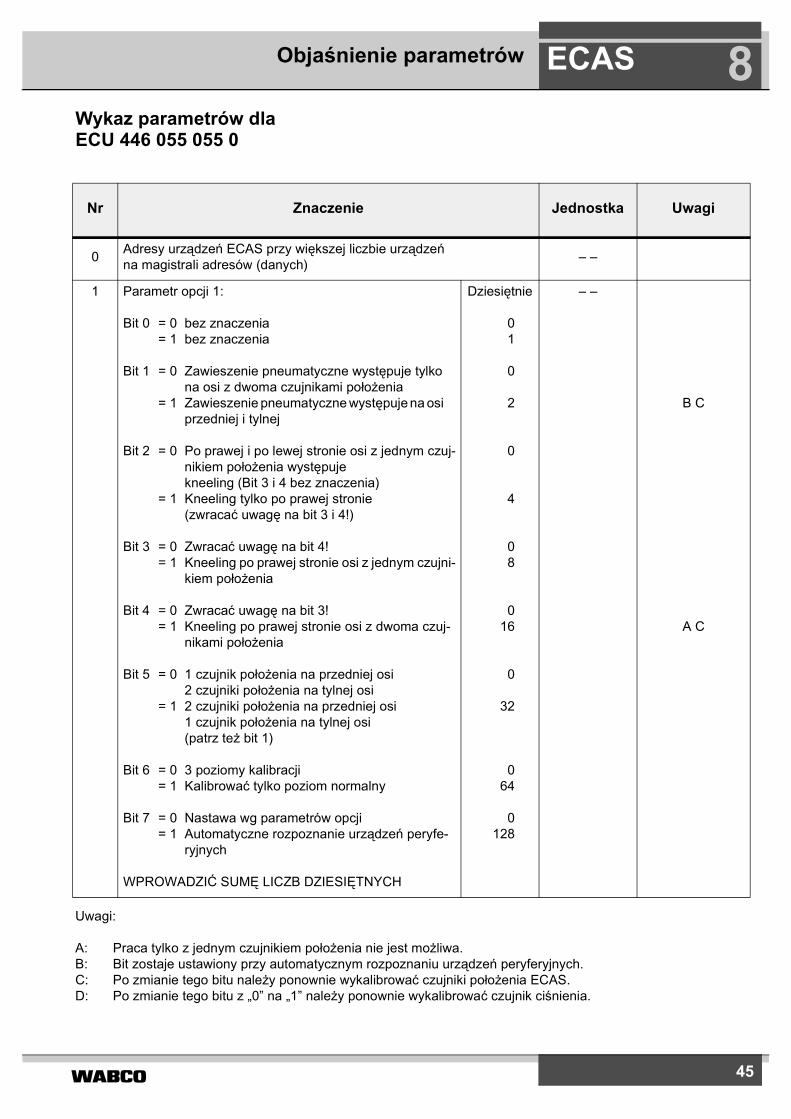
45�����
Objaśnienie parametrów ECAS 8Wykaz parametrów dla ECU 446 055 055 0
Nr Znaczenie Jednostka Uwagi
0 Adresy urządzeń ECAS przy większej liczbie urządzeńna magistrali adresów (danych) – –
1 Parametr opcji 1:
Bit 0 = 0 bez znaczenia= 1 bez znaczenia
Bit 1 = 0 Zawieszenie pneumatyczne występuje tylko na osi z dwoma czujnikami położenia
= 1 Zawieszenie pneumatyczne występuje na osi przedniej i tylnej
Bit 2 = 0 Po prawej i po lewej stronie osi z jednym czuj-nikiem położenia występuje kneeling (Bit 3 i 4 bez znaczenia)
= 1 Kneeling tylko po prawej stronie(zwracać uwagę na bit 3 i 4!)
Bit 3 = 0 Zwracać uwagę na bit 4!= 1 Kneeling po prawej stronie osi z jednym czujni-
kiem położenia
Bit 4 = 0 Zwracać uwagę na bit 3!= 1 Kneeling po prawej stronie osi z dwoma czuj-
nikami położenia
Bit 5 = 0 1 czujnik położenia na przedniej osi2 czujniki położenia na tylnej osi
= 1 2 czujniki położenia na przedniej osi1 czujnik położenia na tylnej osi(patrz też bit 1)
Bit 6 = 0 3 poziomy kalibracji= 1 Kalibrować tylko poziom normalny
Bit 7 = 0 Nastawa wg parametrów opcji= 1 Automatyczne rozpoznanie urządzeń peryfe-
ryjnych
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
01
0
2
0
4
08
016
0
32
064
0128
– –
B C
A C
Uwagi:
A: Praca tylko z jednym czujnikiem położenia nie jest możliwa.B: Bit zostaje ustawiony przy automatycznym rozpoznaniu urządzeń peryferyjnych.C: Po zmianie tego bitu należy ponownie wykalibrować czujniki położenia ECAS.D: Po zmianie tego bitu z „0” na „1” należy ponownie wykalibrować czujnik ciśnienia.
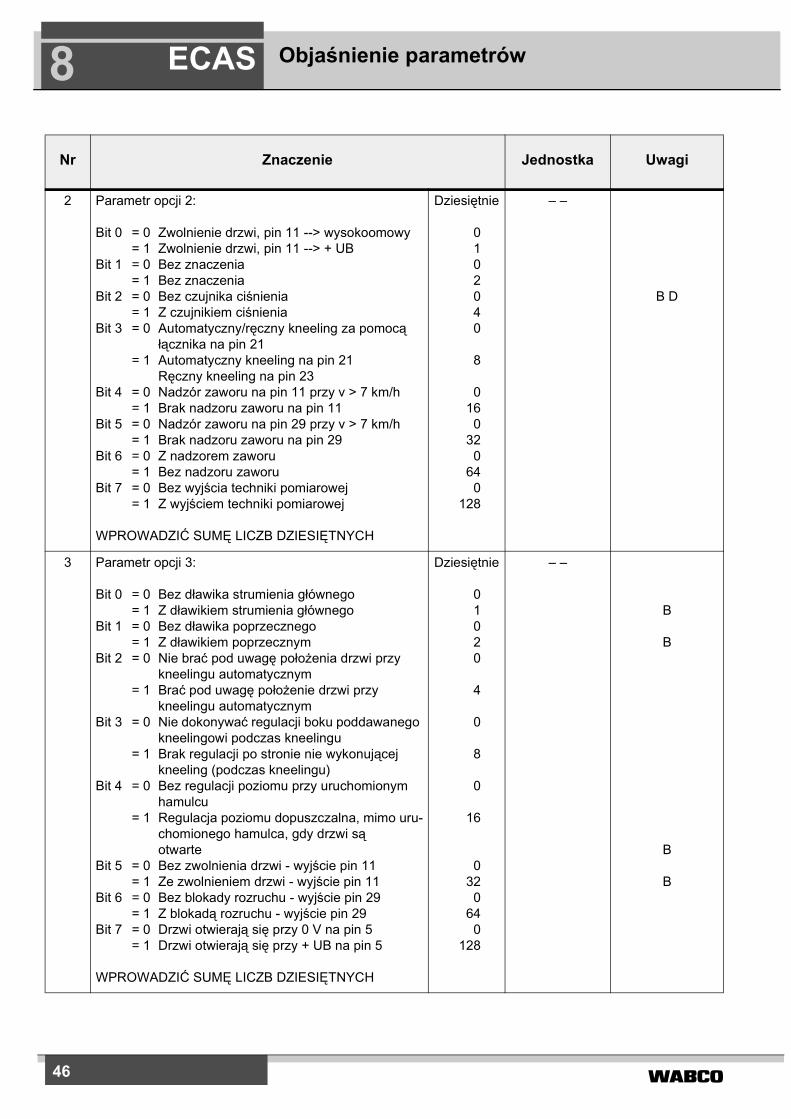
46 �����
Objaśnienie parametrówECAS8Nr Znaczenie Jednostka Uwagi
2 Parametr opcji 2:
Bit 0 = 0 Zwolnienie drzwi, pin 11 --> wysokoomowy= 1 Zwolnienie drzwi, pin 11 --> + UB
Bit 1 = 0 Bez znaczenia= 1 Bez znaczenia
Bit 2 = 0 Bez czujnika ciśnienia= 1 Z czujnikiem ciśnienia
Bit 3 = 0 Automatyczny/ręczny kneeling za pomocą łącznika na pin 21
= 1 Automatyczny kneeling na pin 21Ręczny kneeling na pin 23
Bit 4 = 0 Nadzór zaworu na pin 11 przy v > 7 km/h= 1 Brak nadzoru zaworu na pin 11
Bit 5 = 0 Nadzór zaworu na pin 29 przy v > 7 km/h= 1 Brak nadzoru zaworu na pin 29
Bit 6 = 0 Z nadzorem zaworu = 1 Bez nadzoru zaworu
Bit 7 = 0 Bez wyjścia techniki pomiarowej= 1 Z wyjściem techniki pomiarowej
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
0102040
8
0160
320
640
128
– –
B D
3 Parametr opcji 3:
Bit 0 = 0 Bez dławika strumienia głównego= 1 Z dławikiem strumienia głównego
Bit 1 = 0 Bez dławika poprzecznego= 1 Z dławikiem poprzecznym
Bit 2 = 0 Nie brać pod uwagę położenia drzwi przy kneelingu automatycznym
= 1 Brać pod uwagę położenie drzwi przy kneelingu automatycznym
Bit 3 = 0 Nie dokonywać regulacji boku poddawanego kneelingowi podczas kneelingu
= 1 Brak regulacji po stronie nie wykonującej kneeling (podczas kneelingu)
Bit 4 = 0 Bez regulacji poziomu przy uruchomionym hamulcu
= 1 Regulacja poziomu dopuszczalna, mimo uru-chomionego hamulca, gdy drzwi są otwarte
Bit 5 = 0 Bez zwolnienia drzwi - wyjście pin 11= 1 Ze zwolnieniem drzwi - wyjście pin 11
Bit 6 = 0 Bez blokady rozruchu - wyjście pin 29= 1 Z blokadą rozruchu - wyjście pin 29
Bit 7 = 0 Drzwi otwierają się przy 0 V na pin 5= 1 Drzwi otwierają się przy + UB na pin 5
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
01020
4
0
8
0
16
0320
640
128
– –
B
B
B
B
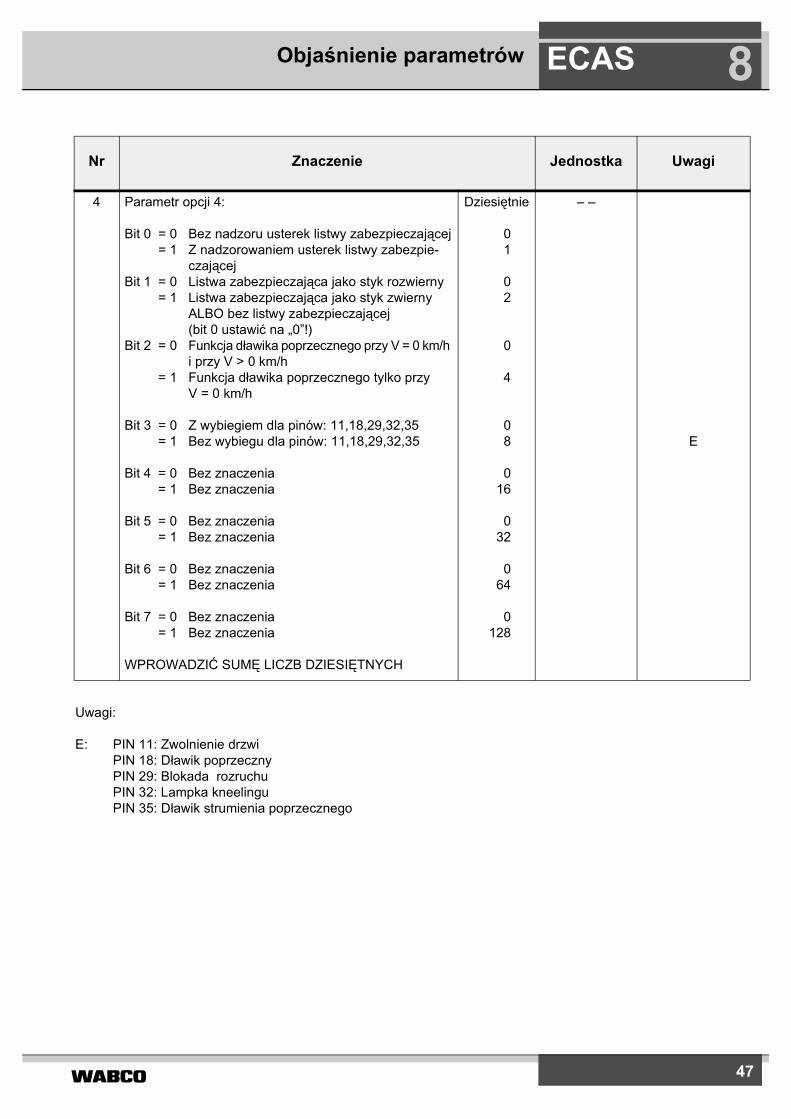
47�����
Objaśnienie parametrów ECAS 8
Nr Znaczenie Jednostka Uwagi
4 Parametr opcji 4:
Bit 0 = 0 Bez nadzoru usterek listwy zabezpieczającej= 1 Z nadzorowaniem usterek listwy zabezpie-
czającejBit 1 = 0 Listwa zabezpieczająca jako styk rozwierny
= 1 Listwa zabezpieczająca jako styk zwierny ALBO bez listwy zabezpieczającej(bit 0 ustawić na „0”!)
Bit 2 = 0 Funkcja dławika poprzecznego przy V = 0 km/h i przy V > 0 km/h
= 1 Funkcja dławika poprzecznego tylko przy V = 0 km/h
Bit 3 = 0 Z wybiegiem dla pinów: 11,18,29,32,35= 1 Bez wybiegu dla pinów: 11,18,29,32,35
Bit 4 = 0 Bez znaczenia= 1 Bez znaczenia
Bit 5 = 0 Bez znaczenia= 1 Bez znaczenia
Bit 6 = 0 Bez znaczenia= 1 Bez znaczenia
Bit 7 = 0 Bez znaczenia= 1 Bez znaczenia
WPROWADZIĆ SUMĘ LICZB DZIESIĘTNYCH
Dziesiętnie
01
02
0
4
08
016
032
064
0128
– –
E
Uwagi:
E: PIN 11: Zwolnienie drzwiPIN 18: Dławik poprzecznyPIN 29: Blokada rozruchuPIN 32: Lampka kneelinguPIN 35: Dławik strumienia poprzecznego
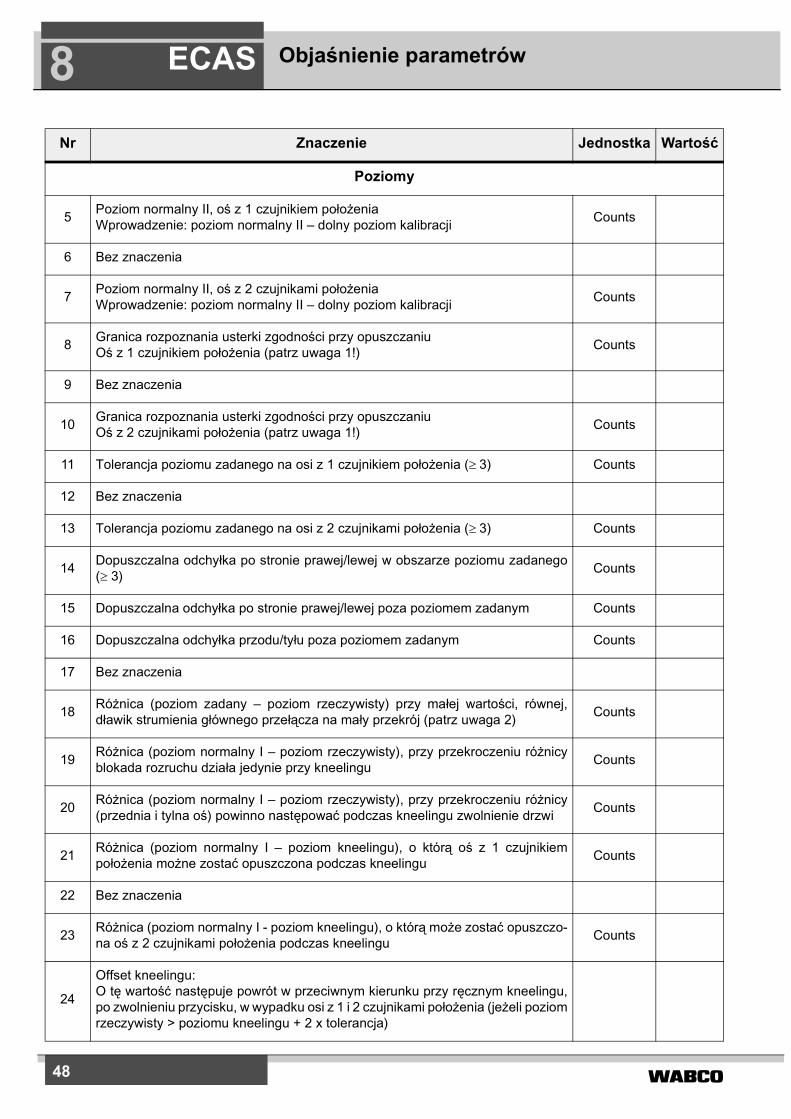
48 �����
Objaśnienie parametrówECAS8Nr Znaczenie Jednostka Wartość
Poziomy
5 Poziom normalny II, oś z 1 czujnikiem położeniaWprowadzenie: poziom normalny II – dolny poziom kalibracji Counts
6 Bez znaczenia
7 Poziom normalny II, oś z 2 czujnikami położenia Wprowadzenie: poziom normalny II – dolny poziom kalibracji Counts
8 Granica rozpoznania usterki zgodności przy opuszczaniu Oś z 1 czujnikiem położenia (patrz uwaga 1!) Counts
9 Bez znaczenia
10 Granica rozpoznania usterki zgodności przy opuszczaniu Oś z 2 czujnikami położenia (patrz uwaga 1!) Counts
11 Tolerancja poziomu zadanego na osi z 1 czujnikiem położenia (��3) Counts
12 Bez znaczenia
13 Tolerancja poziomu zadanego na osi z 2 czujnikami położenia (��3) Counts
14 Dopuszczalna odchyłka po stronie prawej/lewej w obszarze poziomu zadanego(� 3) Counts
15 Dopuszczalna odchyłka po stronie prawej/lewej poza poziomem zadanym Counts
16 Dopuszczalna odchyłka przodu/tyłu poza poziomem zadanym Counts
17 Bez znaczenia
18 Różnica (poziom zadany – poziom rzeczywisty) przy małej wartości, równej,dławik strumienia głównego przełącza na mały przekrój (patrz uwaga 2) Counts
19 Różnica (poziom normalny I – poziom rzeczywisty), przy przekroczeniu różnicyblokada rozruchu działa jedynie przy kneelingu Counts
20 Różnica (poziom normalny I – poziom rzeczywisty), przy przekroczeniu różnicy(przednia i tylna oś) powinno następować podczas kneelingu zwolnienie drzwi Counts
21 Różnica (poziom normalny I – poziom kneelingu), o którą oś z 1 czujnikiempołożenia możne zostać opuszczona podczas kneelingu Counts
22 Bez znaczenia
23 Różnica (poziom normalny I - poziom kneelingu), o którą może zostać opuszczo-na oś z 2 czujnikami położenia podczas kneelingu Counts
24
Offset kneelingu: O tę wartość następuje powrót w przeciwnym kierunku przy ręcznym kneelingu,po zwolnieniu przycisku, w wypadku osi z 1 i 2 czujnikami położenia (jeżeli poziomrzeczywisty > poziomu kneelingu + 2 x tolerancja)
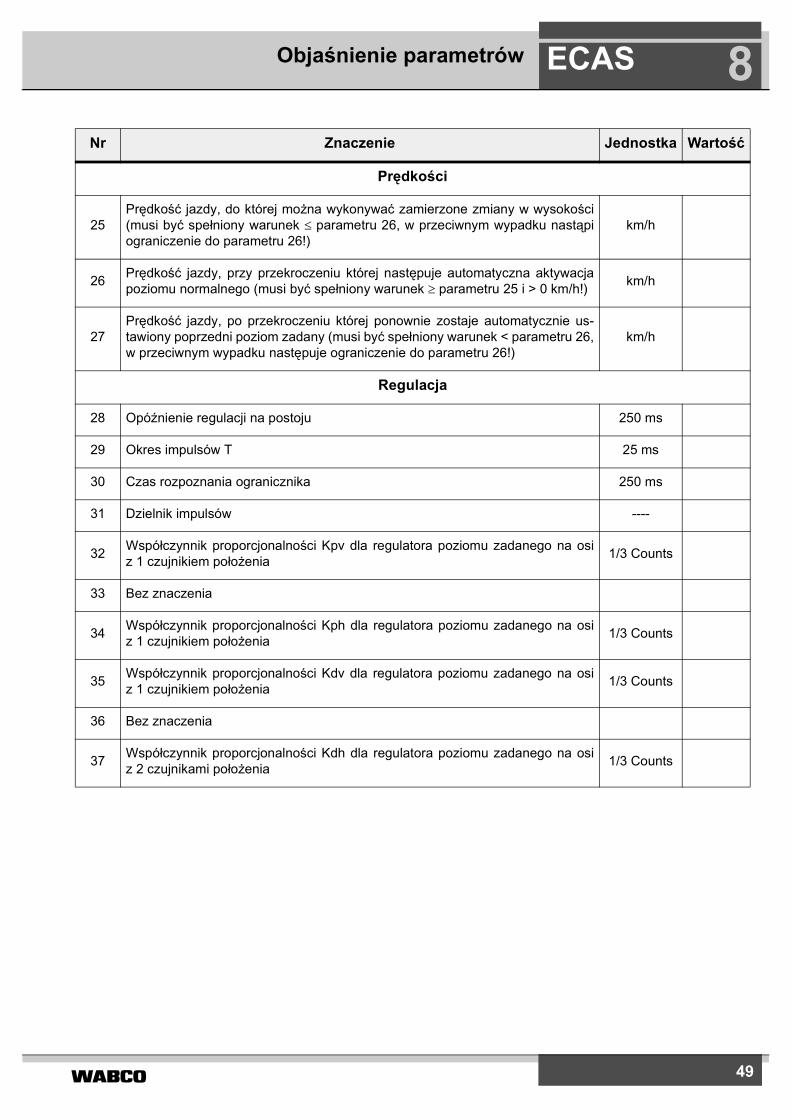
49�����
Objaśnienie parametrów ECAS 8Nr Znaczenie Jednostka Wartość
Prędkości
25Prędkość jazdy, do której można wykonywać zamierzone zmiany w wysokości(musi być spełniony warunek � parametru 26, w przeciwnym wypadku nastąpiograniczenie do parametru 26!)
km/h
26 Prędkość jazdy, przy przekroczeniu której następuje automatyczna aktywacjapoziomu normalnego (musi być spełniony warunek � parametru 25 i > 0 km/h!) km/h
27Prędkość jazdy, po przekroczeniu której ponownie zostaje automatycznie us-tawiony poprzedni poziom zadany (musi być spełniony warunek < parametru 26,w przeciwnym wypadku następuje ograniczenie do parametru 26!)
km/h
Regulacja
28 Opóźnienie regulacji na postoju 250 ms
29 Okres impulsów T 25 ms
30 Czas rozpoznania ogranicznika 250 ms
31 Dzielnik impulsów ----
32 Współczynnik proporcjonalności Kpv dla regulatora poziomu zadanego na osiz 1 czujnikiem położenia 1/3 Counts
33 Bez znaczenia
34 Współczynnik proporcjonalności Kph dla regulatora poziomu zadanego na osiz 1 czujnikiem położenia 1/3 Counts
35 Współczynnik proporcjonalności Kdv dla regulatora poziomu zadanego na osiz 1 czujnikiem położenia 1/3 Counts
36 Bez znaczenia
37 Współczynnik proporcjonalności Kdh dla regulatora poziomu zadanego na osiz 2 czujnikami położenia 1/3 Counts
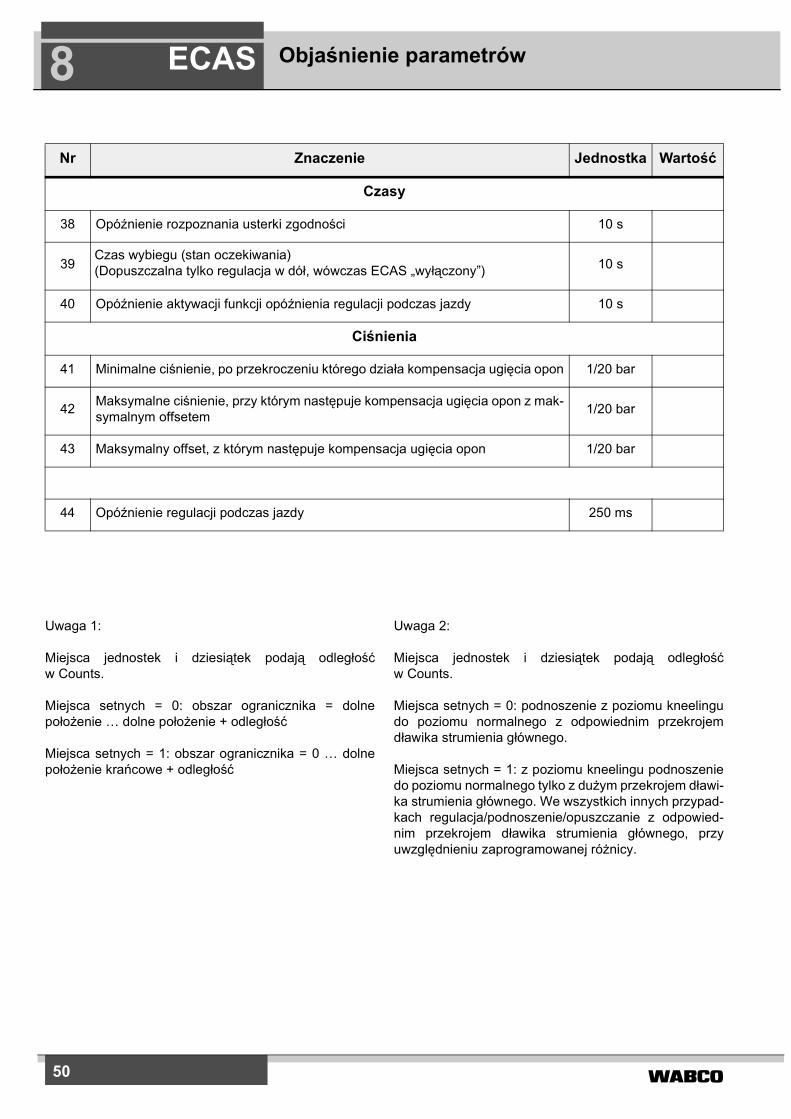
50 �����
Objaśnienie parametrówECAS8
Uwaga 1:
Miejsca jednostek i dziesiątek podają odległośćw Counts.
Miejsca setnych = 0: obszar ogranicznika = dolnepołożenie … dolne położenie + odległość
Miejsca setnych = 1: obszar ogranicznika = 0 … dolnepołożenie krańcowe + odległość
Uwaga 2:
Miejsca jednostek i dziesiątek podają odległośćw Counts.
Miejsca setnych = 0: podnoszenie z poziomu kneelingudo poziomu normalnego z odpowiednim przekrojemdławika strumienia głównego.
Miejsca setnych = 1: z poziomu kneelingu podnoszeniedo poziomu normalnego tylko z dużym przekrojem dławi-ka strumienia głównego. We wszystkich innych przypad-kach regulacja/podnoszenie/opuszczanie z odpowied-nim przekrojem dławika strumienia głównego, przyuwzględnieniu zaprogramowanej różnicy.
Nr Znaczenie Jednostka Wartość
Czasy
38 Opóźnienie rozpoznania usterki zgodności 10 s
39Czas wybiegu (stan oczekiwania) (Dopuszczalna tylko regulacja w dół, wówczas ECAS „wyłączony”) 10 s
40 Opóźnienie aktywacji funkcji opóźnienia regulacji podczas jazdy 10 s
Ciśnienia
41 Minimalne ciśnienie, po przekroczeniu którego działa kompensacja ugięcia opon 1/20 bar
42 Maksymalne ciśnienie, przy którym następuje kompensacja ugięcia opon z mak-symalnym offsetem 1/20 bar
43 Maksymalny offset, z którym następuje kompensacja ugięcia opon 1/20 bar
44 Opóźnienie regulacji podczas jazdy 250 ms
51�����
Objaśnienie parametrów ECAS 8Opis parametrów zmienionych w ECU 446 055 055 0
Parametr 4, bit 2:Jeżeli nie działa kneeling po stronie prawej, wówczasmiędzy miechami osi z 1 czujnikiem położenia występujepołączenie z dławikiem przez otwartą blokadę poprzecz-ną (pin 18 układu elektronicznego = + UB). Połączenie towystępuje zależnie od ustawienia parametru opcji 4, bit 2.
– tylko na postoju (bit 2) albo
– na postoju i podczas jazdy (bit 2 = 0)
Przy ustawieniu parametru opcji 4, bit 2 = 1, zapobiegasię podczas jazdy na zakrętach nadmiernemu dopływowipowietrza z miechów powietrznych po stronie zew-nętrznej zakrętu do miechów po stronie wewnętrznej.Dzięki temu można poprawić charakterystykę prze-chyłów poprzecznych przy dłuższej jeździe na zakrętachi następnie po wyjściu z zakrętu. Z tego względu zalecasię wykonanie tej nastawy.
Parametr 4, bit 3:Zależnie od ustawienia parametru opcji 4, bit 3, wybiegodnosi się do różnych funkcji:
Bit 3=0: Przy wyłączeniu zapłonu następuje zacho-wanie na czas wybiegu istniejących napięćwyjściowych na pinach układu elektroniczne-go 11 (zwolnienie drzwi), 18 (dławik poprzecz-ny), 29 (blokada rozruchu), 32 (lampka knee-lingu) i 35 (dławik strumienia głównego).(Uwaga przy blokadzie rozruchu!!!)
Bit 3=1: Przy wyłączeniu zapłonu następuje załącze-nie istniejących napięć wyjściowych na pinachukładu elektronicznego 11, 18, 29, 32 i 35 na0 V, przez ok. 250 ms.
Zaleca się ustawienie bit 3 = 1, aby zapobiec ewentual-nemu stoczeniu się autobusu po upływie czasu wybiegu(zwolnienie blokady rozruchu).
Parametr 44:Przy wyborze parametru 44, który pozwala na ustawienieczasu opóźnienia od o do 63,75 s, należy przestrzegaćponiższych uwag:
– niewielkie zużycie powietrza > możliwie dużyczas opóźnienia,
– duża trwałość zaworu (liczba cykli zaworu) >możliwie duży czas opóźnienia,
– manewr przyspieszania > możliwie duży czasopóźnienia, aby uniknąć regulacji spowodo-wanej manewrem przyspieszania,
– jazda na zakrętach > czas opóźnienia musi byćkompromisowy: z jednej strony nie powinnaw miarę możliwości następować regulacja pod-czas jazdy na zakręcie, z drugiej strony pojazdnie powinien się też zbyt długo znajdować pozapoziomem zadanym.
Parametr 44 należy dobrać zależnie od ustalenia priory-tetów przez producenta pojazdu. Zaleca się jednak war-tość 60 sekund.
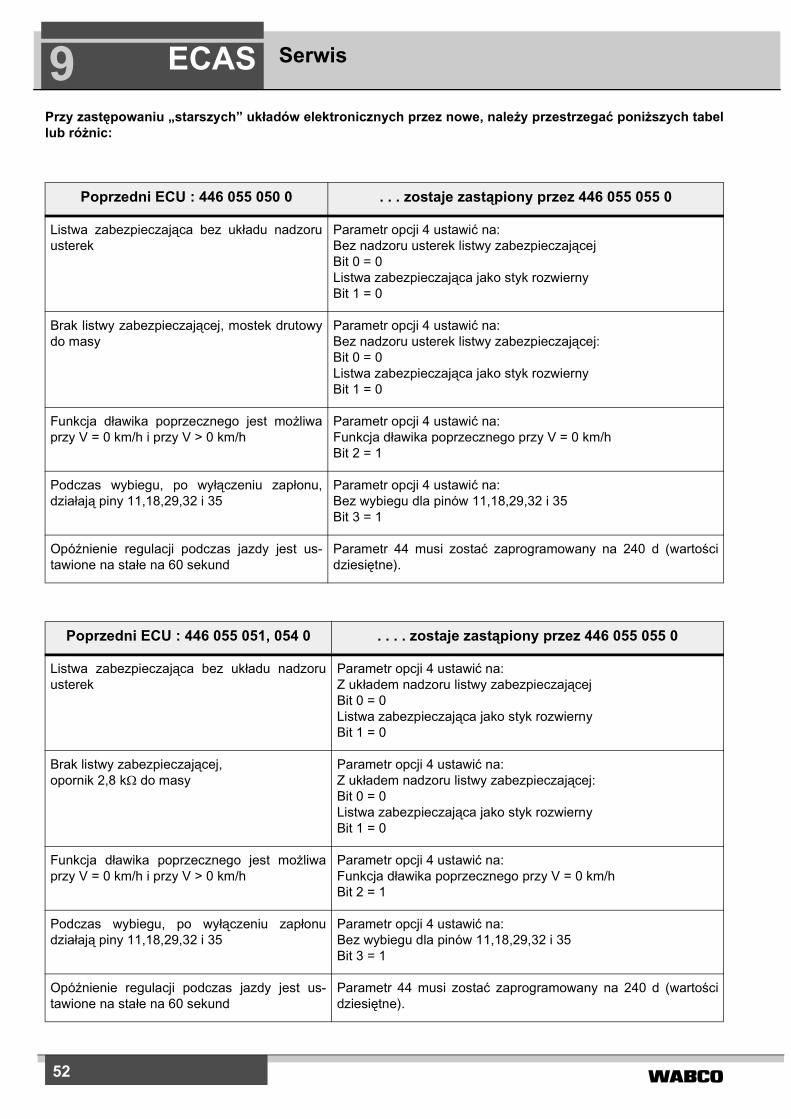
52 �����
SerwisECAS9Przy zastępowaniu „starszych” układów elektronicznych przez nowe, należy przestrzegać poniższych tabellub różnic:
Poprzedni ECU : 446 055 050 0 . . . zostaje zastąpiony przez 446 055 055 0
Listwa zabezpieczająca bez układu nadzoruusterek
Parametr opcji 4 ustawić na:Bez nadzoru usterek listwy zabezpieczającej Bit 0 = 0Listwa zabezpieczająca jako styk rozwiernyBit 1 = 0
Brak listwy zabezpieczającej, mostek drutowydo masy
Parametr opcji 4 ustawić na:Bez nadzoru usterek listwy zabezpieczającej:Bit 0 = 0Listwa zabezpieczająca jako styk rozwiernyBit 1 = 0
Funkcja dławika poprzecznego jest możliwaprzy V = 0 km/h i przy V > 0 km/h
Parametr opcji 4 ustawić na:Funkcja dławika poprzecznego przy V = 0 km/hBit 2 = 1
Podczas wybiegu, po wyłączeniu zapłonu,działają piny 11,18,29,32 i 35
Parametr opcji 4 ustawić na:Bez wybiegu dla pinów 11,18,29,32 i 35Bit 3 = 1
Opóźnienie regulacji podczas jazdy jest us-tawione na stałe na 60 sekund
Parametr 44 musi zostać zaprogramowany na 240 d (wartościdziesiętne).
Poprzedni ECU : 446 055 051, 054 0 . . . . zostaje zastąpiony przez 446 055 055 0
Listwa zabezpieczająca bez układu nadzoruusterek
Parametr opcji 4 ustawić na:Z układem nadzoru listwy zabezpieczającejBit 0 = 0Listwa zabezpieczająca jako styk rozwiernyBit 1 = 0
Brak listwy zabezpieczającej, opornik 2,8 k� do masy
Parametr opcji 4 ustawić na:Z układem nadzoru listwy zabezpieczającej:Bit 0 = 0Listwa zabezpieczająca jako styk rozwiernyBit 1 = 0
Funkcja dławika poprzecznego jest możliwaprzy V = 0 km/h i przy V > 0 km/h
Parametr opcji 4 ustawić na:Funkcja dławika poprzecznego przy V = 0 km/hBit 2 = 1
Podczas wybiegu, po wyłączeniu zapłonudziałają piny 11,18,29,32 i 35
Parametr opcji 4 ustawić na:Bez wybiegu dla pinów 11,18,29,32 i 35Bit 3 = 1
Opóźnienie regulacji podczas jazdy jest us-tawione na stałe na 60 sekund
Parametr 44 musi zostać zaprogramowany na 240 d (wartościdziesiętne).
53�����
Serwis ECAS 9Koncepcja serwisu
ECAS dla autobusów jest systemem, dla którego oferujesię oprócz dostawy również serwis. W sprawach naprawi zaopatrzenia w części zamienne jest więc do dyspozycjifirma WABCO ze swoimi punktami serwisowymi.
Ma to duże znaczenie, ponieważ przy dużej liczbie pro-ducentów pojazdów i typów pojazdów, również ECU sąparametryzowane w najróżniejszy sposób; w przypadkuawarii pojazdu potrzeba w krótkim czasie układu ele-ktronicznego, który jest identyczny z poprzednim, a więcdysponuje tym samym zestawem parametrów.
W tym celu powinna istnieć możliwość otrzymania infor-macji o wpisanych parametrach z WABCO albo od firmy,która dokonała pierwszego wyposażenia. Nie może sięzdarzyć, że zostanie zamontowany zastępczy układ ele-ktroniczny z niewłaściwymi parametrami.
ECU z niewłaściwymi parametrami może powodowaćbłędne działanie.
W odróżnieniu od regulatorów ALB nie ma możliwościumieszczenia wszystkich wartości ustawczych przyrzą-du na tabliczce, znajdującej się nad tabliczką znamio-nową pojazdu. Zakres danych z 47 liczbami 3-cyfrowymijest w przypadku systemu ECAS po prostu za duży.
Z tego powodu opracowano poniższą koncepcję ser-wisu, która umożliwia przyporządkowanie każdegoukładu elektronicznego, w miejscu montażu, do posia-danego przez Państwa zestawu parametrów:
– Serwis WABCO oferuje trwałe, o dużej przyczepno-ści naklejki dla wszystkich, którzy dokonują parame-tryzacji układów elektronicznych, zarówno dla pla-cówek serwisowych, jak też producentów pojazdów.
– Każdy układ elektroniczny zostaje zaopatrzony podokonaniu parametryzacji w tego rodzaju naklejkę,w celu dokumentacji wprowadzonych zmian. Naklej-ka posiada dziesięciomiejscową liczbę, która nadajezawartym parametrom układu elektronicznego ich„nazwę”.
– Pracownik wykonujący parametryzację sporządzaprotokół parametrów i nakleja na niego duplikat tejnaklejki. Protokół ten zostaje odesłany do działu ser-wisu WABCO.Trzeba też sporządzić inne protokoły, jeden jakozałącznik do dokumentacji pojazdu, a drugi dla aktosobistych.
– W centralnym banku danych, prowadzonym przezdział serwisu WABCO, wprowadza się do pamięcikażdy ustalony na nowo albo zmieniony podczasserwisu zestaw parametrów. Bank danych zawierawięc wszystkie wprowadzone poza fabryką zestawyparametrów.
– W razie potrzeby następuje zapytanie w banku da-nych o numer zestawu parametrów.
– W przypadku urządzenia zastępczego używa się za-wsze nowej naklejki, a nie przekłada się poprzedniejnaklejki. Należy o tym powiadomić.
Dla komunikacji danych numery zestawu parametru sądodatkowo kodowane w kodzie paskowym. Zautoma-tyzowana metoda odczytu numeru zestawu parametrówz jednej strony, jak też parametryzacja z drugiej strony,zapobiega możliwości powstania błędów przy przeno-szeniu danych.
Istnieje możliwość, że w pojazdach tego samego produ-centa będzie stosowany ten sam zestaw parametrów.W tym przypadku każdy układ elektroniczny nie otrzymainnej naklejki, gdyż nakład dokumentacyjny jest za duży.Producent pojazdu może zawsze wpisać ten zestaw pa-rametrów do układów elektronicznych. Także w tymprzypadku umieszcza się naklejki na ECU, jednak zaw-sze identyczne z numerem zestawu parametrów specy-ficznym dla danego pojazdu.
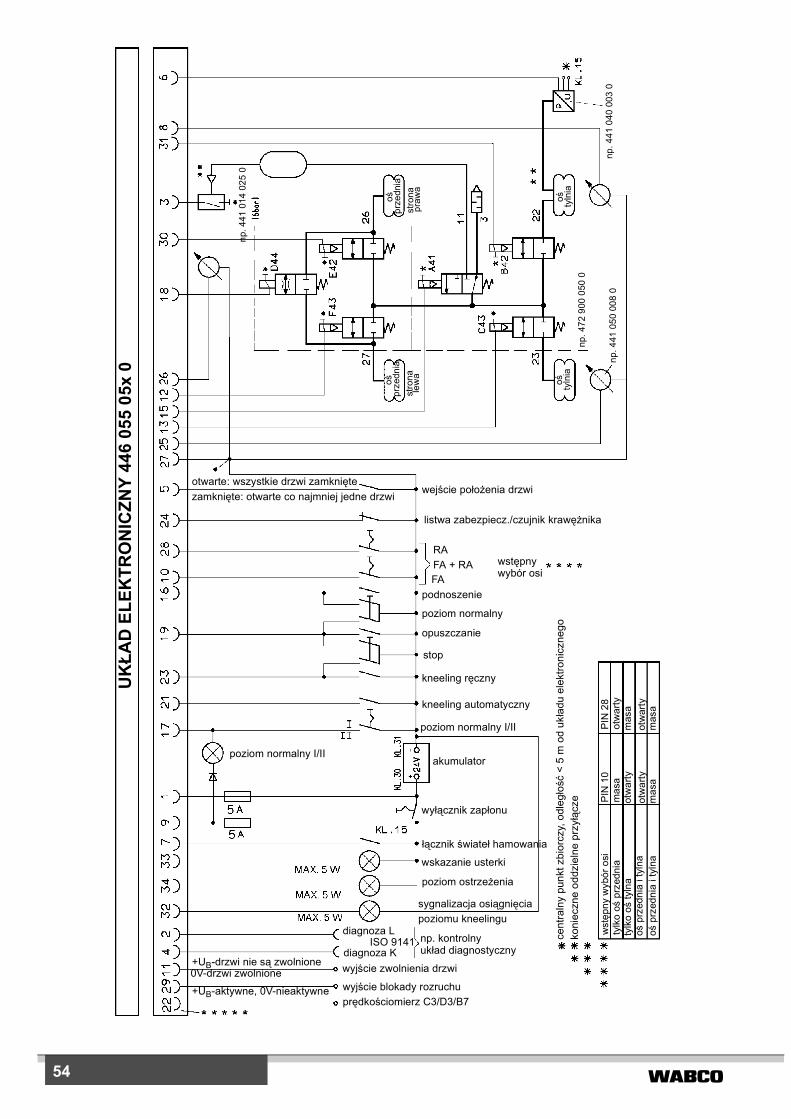
54 �����
wyjście blokady rozruchu
wyjście zwolnienia drzwi
np. kontrolny
prędkościomierz C3/D3/B7
układ diagnostyczny
diagnoza L
diagnoza KISO 9141
sygnalizacja osiągnięcia
poziom ostrzeżenia
wskazanie usterki
łącznik świateł hamowania
wyłącznik zapłonu
akumulator
poziomu kneelingu
poziom normalny I/II
poziom normalny I/II
kneeling automatyczny
kneeling ręczny
opuszczanie
poziom normalny
podnoszenie
RAFA + RAFA
listwa zabezpiecz./czujnik krawężnika
wejście położenia drzwi
stop
otwarte: wszystkie drzwi zamkniętezamknięte: otwarte co najmniej jedne drzwi
+UB-drzwi nie są zwolnione0V-drzwi zwolnione+UB-aktywne, 0V-nieaktywne
wstępnywybór osi
UKŁA
D E
LEK
TRO
NIC
ZNY
446
055
05x
0
koni
eczn
e od
dzie
lne
przyłą
cze
wstęp
ny w
ybór
osi
cent
raln
y pu
nkt z
bior
czy,
odl
egłość
< 5
m o
d ukła
du e
lekt
roni
czne
go
tylk
o oś
prz
edni
aty
lko
oś ty
lna
oś p
rzed
nia
i tyl
naoś
prz
edni
a i t
ylna
PIN
10
mas
aot
war
tyot
war
tym
asa
PIN
28
otw
arty
mas
aot
war
tym
asa
ośpr
zedn
iast
rona
lew
a
ośpr
zedn
iast
rona
praw
a
oś tyln
iaoś tyln
ianp
. 472
900
050
0
np. 4
41 0
50 0
08 0
np. 4
41 0
40 0
03 0
np. 4
41 014
025
0
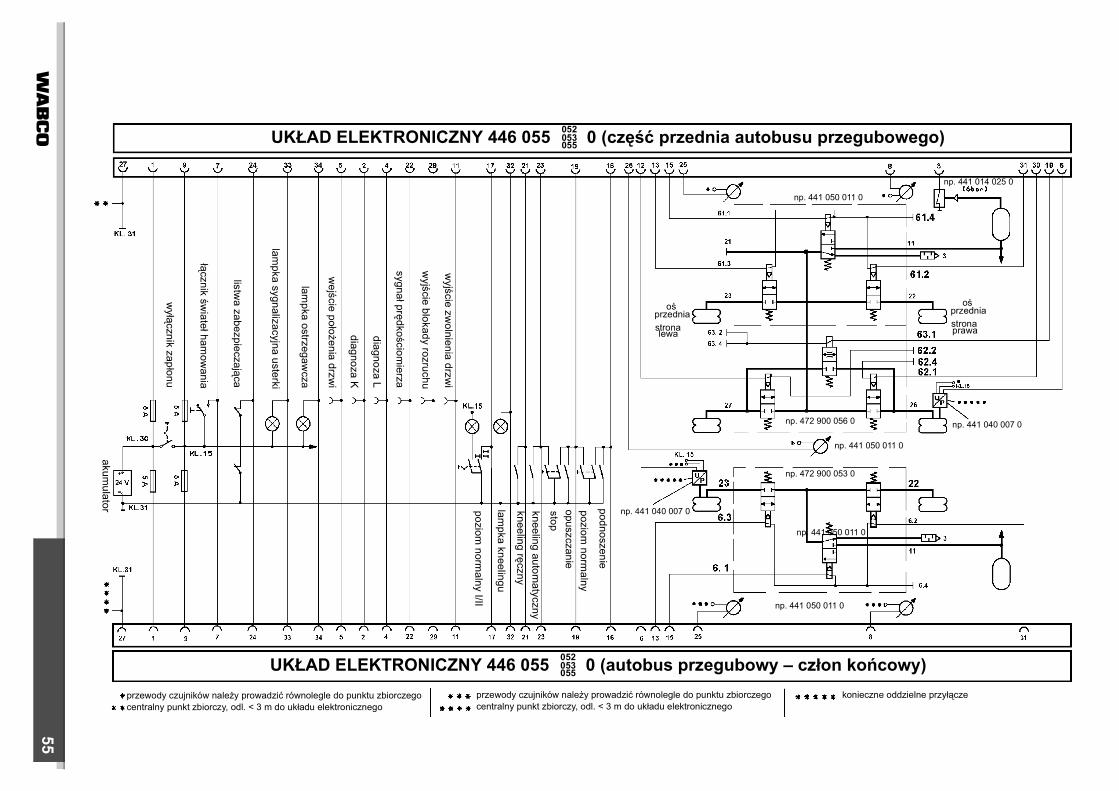
55�
����
wyjście blokady rozruchu
wyjście zw
olnienia drzwi
sygnał prędkościomierza
diagnoza L
diagnoza K
lampka ostrzegaw
cza
lampka sygnalizacyjna usterki
łącznik świateł ham
owania
wyłącznik zapłonu
akumulator poziom
normalny I/II
lampka kneelingu
opuszczaniepoziom
normalny
podnoszenie
wejście położenia drzw
i
stop
UKŁAD ELEKTRONICZNY 446 055 0 (część przednia autobusu przegubowego)
przewody czujników należy prowadzić równolegle do punktu zbiorczego
ośprzedniastronalewa
ośprzedniastronaprawa
np. 441 050 011 0
listwa zabezpieczająca
kneeling automatyczny
kneeling ręczny
052053055
np. 441 014 025 0
np. 441 040 007 0
np. 441 050 011 0
np. 472 900 056 0
np. 472 900 053 0
np. 441 050 011 0
np. 441 050 011 0
np. 441 040 007 0
UKŁAD ELEKTRONICZNY 446 055 0 (autobus przegubowy – człon końcowy)052053055
centralny punkt zbiorczy, odl. < 3 m do układu elektronicznegoprzewody czujników należy prowadzić równolegle do punktu zbiorczegocentralny punkt zbiorczy, odl. < 3 m do układu elektronicznego
konieczne oddzielne przyłącze

56 �����
Notatki:
ECAS