DEVELOPMENT OF MATHEMATICAL MODEL FOR THE...
14
149 płk dr inŜ. Leszek LOROCH prof. dr hab. inŜ. Krzysztof SIBILSKI ppłk dr inŜ. Andrzej śYLUK Instytut Techniczny Wojsk Lotniczych DEVELOPMENT OF MATHEMATICAL MODEL FOR THE AUTONOMOUS GLIDING DELIVERY SYSTEM For parafoil and payload aircraft, control is affected by changing the length of several rigging lines connected to the outboard side and rear of the parafoil leading to complex changes in the shape and orientation of the lifting surface. Flight mechanics of parafoil and payload aircraft most often employ a 6 or 9 DOF representation with the canopy modeled as a rigid body during flight. The effect of control inputs usually is idealized by the deflection of parafoil brakes on the left and right side of the parafoil. This work focused on description of a 9 DOF parafoil and payload aircraft simulation model. Nomenclature x C , y C , z C : Components of position vector of point C in an inertial frame. Φ b ,Θ b ,Ψ b : Euler roll, pitch and yaw angles of payload. Φ b ,Θ b ,Ψ b : Euler roll, pitch and yaw angles of parafoil. , , x y z & & & : Components of velocity vector of point C in an inertial frame. P b , Q b , R b : Components of angular velocity of payload in payload reference frame. P p , Q p , R p : Components of angular velocity of parafoil in parafoil reference frame. m b , m p : Mass of payload and parafoil. F xc , F yc ,F zc : Components of joint constraint force in an inertial frame. M xc , M yc , M zc : Components of joint constraint moment in an inertial frame. u i , v i , w i : Components of relative air velocity of aerodynamic center of panel in i-th frame. V s : Magnitude of velocity vector of mass center of payload. u b , v b , w b : Components of relative air velocity of mass center of payload in payload reference frame. u A , v A , w A : Components of relative air velocity of apparent mass center in parafoil reference frame. x cb , y cb , z cb : Components of vector from point C to mass center of payload in payload reference frame. x cp , y cp , z cp : Components of vector from point C to mass center of parafoil in parafoil reference frame. x ca , y ca , z ca : Components of vector from point C to apparent mass center in parafoil reference frame.
Transcript of DEVELOPMENT OF MATHEMATICAL MODEL FOR THE...

149
płk dr inŜ. Leszek LOROCH prof. dr hab. inŜ. Krzysztof SIBILSKI ppłk dr inŜ. Andrzej śYLUK Instytut Techniczny Wojsk Lotniczych
DEVELOPMENT OF MATHEMATICAL MODEL FOR THE AUTONOMOUS GLIDING DELIVERY SYSTEM
For parafoil and payload aircraft, control is affected by changing the length of several rigging lines connected to the outboard side and rear of the parafoil leading to complex changes in the shape and orientation of the lifting surface. Flight mechanics of parafoil and payload aircraft most often employ a 6 or 9 DOF representation with the canopy modeled as a rigid body during flight. The effect of control inputs usually is idealized by the deflection of parafoil brakes on the left and right side of the parafoil. This work focused on description of a 9 DOF parafoil and payload aircraft simulation model.
Nomenclature
xC, yC, zC: Components of position vector of point C in an inertial frame. Φb ,Θb ,Ψb: Euler roll, pitch and yaw angles of payload. Φb ,Θb ,Ψb: Euler roll, pitch and yaw angles of parafoil. , , x y z& & & : Components of velocity vector of point C in an inertial frame. Pb , Qb , Rb: Components of angular velocity of payload in payload reference frame. Pp , Qp , Rp: Components of angular velocity of parafoil in parafoil reference frame. mb, mp: Mass of payload and parafoil. Fxc, Fyc,Fzc: Components of joint constraint force in an inertial frame. Mxc, Myc, M zc: Components of joint constraint moment in an inertial frame. ui, vi, wi: Components of relative air velocity of aerodynamic center of panel in i-th frame. Vs: Magnitude of velocity vector of mass center of payload. ub, vb, wb: Components of relative air velocity of mass center of payload in payload reference frame. uA, vA, wA: Components of relative air velocity of apparent mass center in parafoil reference frame. x cb, y cb , z cb: Components of vector from point C to mass center of payload in payload reference frame. x cp, ycp, z cp: Components of vector from point C to mass center of parafoil in parafoil reference frame. x ca, yca, z ca: Components of vector from point C to apparent mass center in parafoil reference frame.

150
x pa, vpa, z pa: Components of vector from parafoil mass center to apparent mass center in parafoil reference frame. Ib, Ip: Inertia matrix of payload and parafoil. IF, IM: Apparent mass force and moment coefficient matrices.
b
XC : Drag coefficient of payload. p
ZiC : Lift coefficient of i- th panel of parafoil canopy. p
XiC : Drag coefficient of I- th panel of parafoil canopy.
P, Q, R: Components of angular velocity of parafoil in parafoil reference frame. η : Angle of incidence Kc, Cc: Rotational stiffness and damping coefficients of joint C, Ab: Payload reference area. Ai: Reference area of i th panel of parafoil canopy. Tp: Transformation matrix from inertial reference frame to parafoil reference frame. Tb: Transformation matrix from inertial reference frame to payload reference frame. Ti: Transformation matrix from I- th panel’s reference frame to parafoil reference frame. T ti: Transformation matrix from inertial reference frame to I-th command trajectory reference frame. ψ : Angle between inertial reference frame and i th command trajectory reference frame. , b p
A AF F : Aerodynamic force on payload and parafoil in their respective
frames.
AM : Moment on parafoil due to steady aerodynamic forces.
MUA: Moment on payload due to unsteady aerodynamic forces. 1. Introduction
Parafoil-load-systems are unique devices for recovery, rescue and delivery of air cargo. Known since the late 60s they obtain importance for today’s applications because of several reasons: • They are cheap, or better say low-cost, compared to fixed wings. • They are lightweight and small (when packed), crucial for aerial delivery and
space recovery. • It is possible to face wind-offsets because of their ability to glide and steer. This is
a major advantage against conventional (round) parachutes. • Precise and very soft landings are possible, which makes parafoil-load-systems
applicable for sensitive instruments or injured humans. In science and industry there are two major efforts for the enhancement of these systems made: to scale the parafoils up for higher payloads, and to add autonomy to the systems, enabling automatic guidance, navigation and control (GNC) tasks. The Air Force Institute of Technology focused on the latter task and developed an experimental vehicle for the demonstration of an autonomous landing of a parafoil-load-system. The design of a GNC-concept presupposes fundamental knowledge of the system’s qualities and performance. A flight mechanical model is required which

151
predicts the reactions to control inputs and disturbances. Primary for the development of this model are flight tests in which excitations and significant states of the system are recorded, providing data for a supplementary analysis. In this procedure the modeling of the relative motion, i.e. the movement between canopy and load, is a task of special interest. On one hand quantitative information of that motion is needed to convert data coming from sensors mounted to the load to corresponding values for the canopy. On the other hand relative motion is an integral part of the flight mechanical model itself.
Compared to conventional fixed wing aircraft configurations, parafoil and payload air vehicles are compact and lightweight before launch, exhibit relatively long endurance, fly at low speed, and impact ground with low vertical velocity. For some air vehicle missions these characteristics are quite attractive, particularly for autonomous micro aircraft with long-term sensing or sensitive equipment delivery requirements. The most common means to steer a parafoil is through deflection of right and left brakes on the parafoil. Iacomini and Cerimele [7] performed a detailed study on the turn performance of the X-38 parafoil and demonstrated extraction of lateral-directional aerodynamic coefficients from flight data. This data was inserted into an 8 degree-of-freedom parafoil and payload model for flight simulation validation. They noted that under certain conditions, adverse turn rates can be experienced, which they attributed to parafoil brake reflex. Whitte [18] and Wyllie [20] considered turn performance of the ALEX (Autonomous Landing Experiment) parafoil to support the development of a guided parafoil and payload system. Flight test data of parafoil turning angle was fit to a first order filter driven by brake deflection angle. Slegers and Costello [13, 14] also considered turning performance of parafoil and payload systems and like Iacomini and Cerimele [8] found turning performance to be a complex function of canopy curvature, rigging angle, and brake deflection. They showed right and left parafoil brake deflection exhibit two basic modes of lateral control, namely, skid and roll steering, which generate lateral response in opposite directions. This control reversal is a complex function of rigging angle, canopy curvature, aerodynamic properties of the parafoil, as well as parafoil brake deflection magnitude and is particularly bothersome for autonomous systems that must automate control activity. While left and right parafoil brake deflection is far and away the most common method of control, other control mechanisms for parafoil and payload systems are possible. For example, a method affect turn control for a parafoil and payload system is to create an asymmetry in the suspension line lengths on both sides of the parafoil leading to a tilted canopy. Also, rigging angle has a powerful effect on the descent rate of the system. Large negative rigging angles lead to larger descent rates but are more stable at higher forward speed while rigging angles close to zero lead to lower descent rates but are less stable at high forward speed. For longitudinal control, the rigging angle can be dynamically changed in flight. While direct canopy tilt and dynamic rigging angle control appear on the surface to offer a viable control mechanism they have to date been unexplored in literature. The work reported here explores the capability of canopy tilt for lateral control and dynamic rigging angle for longitudinal control of parafoil and payload systems.
New concepts for gathering real-time battlefield information rely on autonomous parafoil and payload aircraft. Relative to other air vehicles, parafoil and payload aircraft enjoy the advantage of low speed flight, long endurance, and low ground impact velocity. Control is affected by changing the length of several of the parafoil rigging lines connected to the outboard side and rear of

152
the parafoil lifting surface. To efficiently tailor this type of aircraft to a particular design environment, dynamic modeling and simulation is applied to an idealized representation of this complex system. Flight mechanics of parafoil and payload aircraft are typically modeled using a 6 or 9 degree-of-freedom representation. In both cases, the parafoil canopy is considered a rigid body once it is inflated. There are two methods used to represent control. Perhaps the simplest method to model control forces and moments is through the use of control derivatives with the coefficients identified from flight data. The advantage of this method lies in the simplicity of the approach. The disadvantage is that little insight is provided into design parameters that effect the control response. Another method to model the control force and moment caused by the action of changes in rigging line length on each side of the parafoil is a plain flap or parafoil brake that can be deflected downward only. While more complicated, the advantage of this method lies in the close connection to design parameters of the parafoil. Wolf [18] and later Doherr and Schilling [2] reported on the development of dynamic models for parachute and payload aircraft. Hailiang and Zizeng used a 9-degree of freedom model to study the motion of a parafoil and payload system [6]. Iosilevskii established center of gravity and lift coefficient limits for a gliding parachute [9]. Brown analyzed the effects of scale and wing loading on a parafoil using a linearized model based on computer calculated aerodynamic coefficients [1]. More recent efforts by Zhu, Moreau, Accorsi, Leonard, and Smith [22] as well as Gupta et all [4] have incorporated parafoil structural dynamics into the dynamic model of a parachute and payload system. A significant amount of literature has been amassed in the area of experimental parafoil dynamics beginning with Ware and Hassell who investigated ram-air parachutes in a wind tunnel by varying wing area and wing chord [17]. More recently extensive flight tests have been reported on NASA’s X-38 parafoil providing steady-state data and aerodynamics for large-scale parafoils [1, 10, 11, 12, 16].
This paper describes a 9 degree-of-freedom simulation model which is allowed to predict control performance of an autonomous parafoil and payload system.
2. Parafoil and payload system model
Video analysis yielded data that represent certain system qualities. A model of this system has to perform preferably the same way. Thus high demands are made against the model: it must map the real geometry very closely. All elements involved in the relative motion should also be considered in kinematic modeling [13]. On the other hand for limitation of complexity some simplifications are required: • Combination of functionally similar bodies. • Elimination of unnecessary degrees of freedom. • Simplification of joints. • Modeling restricted to rigid bodies. The latter point needs some explanation, because it seems oversimplified to treat textile elements without any stiff components as rigid. However, harness, belts and lines are of a very flexible nature. Forces can only be transmitted in one single direction; transmission of moments is not possible. Depending upon material, elements elongate distinctly under stress, showing highly nonlinear characteristics. Nevertheless here lines and belts are to be modeled as rigid bodies. This assumption is justified by following reasons:

153
• Many possible motions are restricted or prevented by combining single lines or belts to functional units (“trusses”). • Used materials offer practically no lengthening when stressed; their modulus of elasticity is of the size of steel. • Lift of the parafoil and weight of the capsule produce an initial tension in harness and suspension lines which is increased by maneuvering loads; sagging is not to fear. • Mechanical constraints additionally brace the connections between canopy and capsule.
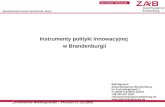
Figure 1 Parafoil and Payload [13, 14]
In addition to the rigid bodies there are some other basic elements of a multi-body-model, generally referred as “couplings”. Where individual bodies interact kinematically, couplings have to be defined. For the modeling of the parafoil-load-system, following types have been used:

154
• Usually the participating bodies are connected by joints. These feature degrees of freedom like observed in the real system.
• Where it’s not possible to treat lines, belts or other fabrics as rigid, flexibility is modeled by the use of springs and dampers. Here this type has been used just for experimental purposes at the coupling of canopy and suspension-lines and at the slider . That kind of connection is massless.
• Some interactions between bodies can not be described appropriately by above-mentioned elements. There, a formulation of a constraint may help. For example the shoulder strap of the harness is modeled by the condition
“constant distance of two specific points”. Using all the assumptions and simplifications described in this chapter, the kinematic model has been established. In Figure 1 the main elements and functional units can be seen.
Figure 1 shows a schematic of the parafoil and payload system. With the exception of movable parafoil brakes, the parafoil canopy is considered to be a fixed shape once it has inflated. The combined system of the parafoil canopy and the payload is represented with a 9 degree-of-freedom (DOF) model, originally developed by Slegers and Costello [13]. The degrees-of-freedom include three inertial position components of the joint C as well as the three Euler orientation angles of the parafoil canopy and the payload. The canopy shape is modeled as a collection of panels oriented at fixed angle with respect to each other as shown in Figure 2. Connected to the outboard end panels are brakes that locally deflect the canopy downward. The parafoil canopy is connected to joint C by a rigid massless link from the mass center of the canopy. The payload is connected to joint C by a rigid massless link from the mass center of the payload. Both the parafoil and the payload are free to rotate about joint C but are constrained by the force and moment at the joint The canopy shape is modeled as a collection of panels oriented at fixed angle with respect to each other as shown in Figure 3. Deflection of the control arms on the payload causes two on the parafoil canopy. Connected to the outboard end panels are brakes that locally deflect the canopy downward. Due to the fact that the parafoil canopy is a flexible membrane, deflection of the control arms on one side of the parafoil also creates tilt of the canopy. Both these effects combine together to form the overall turning response. The parafoil canopy is connected to joint C by a rigid massless link from the mass center of the canopy. The payload is connected to joint C by a rigid massless link from the mass center of the payload. Both the parafoil and the payload are free to rotate about joint C but are constrained by the force and moment at the joint. The combined system of the parafoil canopy and the payload are modeled with 9 degrees-of-freedom (DOF), including three inertial position components of the joint C as well as the three Euler orientation angles of the parafoil canopy and the payload. The kinematic equations for the parafoil canopy and the payload are provided in Equations 1 through 3.
1 sin tan cos tan
0 cos sin
0 sin / cos cos / cos
b b b b b b
b b b b
b b b b b b
P
Q
R
Φ Φ Θ Θ Θ Θ = Φ − Φ Ψ Φ Θ Φ Θ
&
&
&
(1)
1 sin tan cos tan
0 cos sin
0 sin / cos cos / cos
p p p p p p
p p p p
p p p p p p
P
Q
R
Φ Φ Θ Θ Θ Θ = Φ − Φ Ψ Φ Θ Φ Θ
&
&
&
(2)

155
[ ] [ ]TC C C p C C Cx y z u v w= T& & & (3)
where matrix Tp is given by Equation 25. The translational and rotational dynamics are inertially coupled because the position degrees of freedom of the system are the inertial position vector components of the coupling joint. Therefore, in our opinion, the formalism of analytical mechanics allows us to present dynamic equations of motion of mechanical systems in generalised co-ordinates, giving incredibly interesting and comfortable tool for construction of equation of motion of parafoil-body aircraft. An example can be Gibbs-Appel equations. Those equations have the following form [3, 5]:
d S
dt
∂∂
=
Q
q&& (4)
where: q - is the vector of generalised co-ordinates; ( ), , ,S tq q q& && - is so called Appel
function, or functional of accelerations. Functional S for i-th element of the mechanical system is given by the equation [3, 5]:
1
2
i i i
V
S dm= ∫∫∫ v v& &o (5)
where: iv& means the vector of absolute acceleration of elementary mass dmi of i-th body of the dynamical system considered.
( )0 0 0 0
i i i i i i i= + × + × ×v v ε ρ ω ω ρ& & (6)
Assuming that:
3 3 3
i ii i′′ ′= + +r r r r (7)
and: Ti i i
i
i i
O
m m
m
=
I rM
r J
%
%
(8)
2
0 0
0 0 0
i i ii
i i i i
O
m m
m
+=
+
ω ω rh
r ωv ω J ω
% %
% % % (9)
where mi – mass of the i-th element, JOi tensor of inertia of the i-th element, + vector
of the angular velocity, v0i vector of the velocity of the i-th element, and assuming
that:
if: , ,T
a a aξ η ς = a , than
0
0
0
a a
a a
a a
ς η
η ξ
η ξ
− = − −
a% ;
the term (5) can be expressed in the following matrix form:
( ) ( )1 11
2
Ti i i i i i i iS
− − = + + v M h M v M h& & (10)
Calculating the matrixes Mi, hi, the Appel function Si for all k bodies of the system, and defining matrixes:
1 2, ,... ...,
kdiag
=
M M M M (11)

156
( ) ( ) ( )1 2, ,... ...,
TT T T
k =
v v v v (12)
and
( ) ( ) ( )1 2, ,... ...,
TT T T
k =
h h h h (13)
functional S for the whole mechanical system is given by the equation:
( ) ( )1 11
2
T
S − −= + +v M h M v M h& & (14)
Assuming that q is vector generalised coordinates of mechanical system, the relations between q and v are given by equation:
( ) ( ), ,t t= +v D q q f q& (15)
hence: ( ) ( ), , ,t t= +v D q q φ q q&& && (16)
where: = +Dq f&& &ϕϕϕϕ
Figure 2 Location of points, radius vectors and vectors of velocities and accelerations
Therefore the Appel function can be expressed by following relation:
( ) ( ) ( )1, , ,
2
T
S t − −= + + + +q q q Dq h M Dq h& && && &&1 11 11 11 1ϕ Μ ϕ Μϕ Μ ϕ Μϕ Μ ϕ Μϕ Μ ϕ Μ (14)
Assuming, that: T
g =M D MD and ( )T
g = +h D M hϕϕϕϕ , and remembering, that:
( ) 1 1T T− −=D D MD D M the equation (14) can be expressed in the form:
( ) ( ) ( )1, , ,
2
T
g g g gS t−−= + +q q q q h M q h& && && &&11111111Μ ΜΜ ΜΜ ΜΜ Μ (15)
In case when we consider model of a parafoil–body aircraft the vector generalized

157
co-ordinates has following form:
, , , , , , , ,
T
b b b p p p C C Cx y z
= Φ Θ Ψ Φ Θ Ψ
q (16)
vector of quasi-velocities can be expressed by the following equation:
, , , , , , , ,
T
b b b p p p C C CP Q R P Q R U V W
=
w (17)
For the parafoil – body dynamical system the relations between generalized
velocities , , , , , , , ,
T
b b b p p p C C Cx y z
= Φ Θ Ψ Φ Θ Ψ
q & & & && & & & & and quasi velocities w (Equation
(17) are following: ( )T=q A q w& (18)
The matrix AT has a construction:
G
T T
=
A 0 0
A 0 C 0
0 0 I
(19)
The matrices AG and CT are classical matrices of transformations of kinematics relations and can be found in Ref. 34, the unit matrix I has dimension (3n+1) x (3n+1), n – number of the main rotor blades. From (18) we have the following relation:
( )T T= +q A q w A w&&& & (20)
Finally, the Appel function has following form:
( ) ( ) ( )1 1* 1, , ,
2
T
w w w w wS t− −= + +q w w w M h M w M h& & &
where ( ) T
w T q T=M q A M A , and: ( ) ( ),T
w T q T q= +h q w A M A h&
Gibbs-Appel equations of motion, written in quasivelociyies has the following form:
( ) ( ) ( )* * *
*
1
,..........., , , , , ,
TT
w w
k
S S St t t
w w
∂ ∂ ∂= = + = ∂ ∂ ∂
M q w h q w Q q ww
&& & &
(21)
The vector Q* is the sum of aerodynamic loads, potential forces acting on the helicopter, external hanging load forces, and another non-potential forces acting on the helicopter slung load system Eq. (21). After algebraic calculations and transformations the equations (21) can be presented if the following matrix form:
1
2
3
4
0
0
0 0
0
b
b C b b b
a p
F C p C F p p p p
b
Cb C b
a a a p
M p p F C p F p C p
m m
m m
− − − − + = + − −
S T T B
wI S S I T T T B
FI S T B
I I S I S S I T S T B
& (22)
The matrix in Equation 22 is a block 4 x 4 matrix where each element is a 3 x 3 matrix. Rows 1-3 in Equation 23 are forces acting on the payload mass center expressed in the payload frame and rows 7-9 are the moments about the payload mass center also in the payload frame. Rows 4-6 in Equation 4 are forces acting on the parafoil mass center expressed in the parafoil frame and rows 10-12 are the

158
moments about the parafoil mass center also in the parafoil frame. The j
iS
matrices are cross product operator matrices, working on different vectors from i to j associated with the system configuration.
0
0
0
ij ij
j
i ij ij
ij ij
z y
z x
y x
− = − −
S (23)
The matrix Tb represents the transformation matrix from an inertial reference frame to the payload reference frame:
c c c s s
s s c c s s s s c c c s
c s c s s c s s s c c c
b b b b b
b b b b b b b b b b b b b
b b b b b b b b b b b b
Θ Ψ Θ Ψ − Θ = Φ Θ Ψ − Φ Ψ Φ Θ Ψ + Φ Ψ Θ Φ Φ Θ Ψ + Φ Ψ Φ Θ Ψ − Φ Ψ Θ Φ
T (24)
while, Tp represents the transformation matrix from an inertial reference frame to the parafoil reference frame.
c c c s s
s s c c s s s s c c c s
c s c s s c s s s c c c
p p p p p
b p p p p p p p p p p p p
p p p p p p p p p p p p
Θ Ψ Θ Ψ − Θ = Φ Θ Ψ − Φ Ψ Φ Θ Ψ + Φ Ψ Θ Φ Φ Θ Ψ + Φ Ψ Φ Θ Ψ − Φ Ψ Θ Φ
T (25)
The common shorthand notation for trigonometric functions is employed where sin(α) ≡ sα, cos(α) ≡ cα and tan(α) ≡ tα . The matrices Ib and Ip represent the mass moment of inertia matrices of the payload and the parafoil body with respect to their respective mass centers and the matrices IF and IM represent the apparent mass force coefficient matrix and apparent mass moment coefficient matrix respectively.
0 0
0 0
0 0
F
A
B
C
=
I (26)
0
0 0
0
X XZ
M Y
XZ Z
I I
I
I I
− = −
I (27)
Equations 28 through 31 provide the right hand side vector of Equation 22.
[ ]1, ,
Tb b b
b A b w w Cb Cb Cbm x y z= + −B W F S S (28)
[ ] [ ]2, , , , , ,
TT Tp p p p
p A F p w F A A A p w w Cp Cp Cpx y z u v w m x y z = + − − − B W F I T S I S S& & & & (29)
[ ]3, ,
Tb
C w b b b bP Q RΒ = −M S I (30)
( ) [ ] [ ]4, , , , , ,
T T TT p a a p
A p b C w p M p p p p F p p w F A A AP Q R x y z u v w = − − + − − B M T T M S I I S I T S S I& & & & (31)
where 0
0
0
b b
b
w b b
b b
R Q
R P
Q P
− = − −
S (32)

159
0
0
0
p p
p
w p p
p p
R Q
R P
Q P
− = − −
S (33)
The weight force vectors on both the parafoil and payload in their respective body axes are given in Equations 34 and 35.
[ ]sin sin cos cos cosT
b b b b b b bm g= − Θ Φ Θ Φ ΘW (34)
sin sin cos cos cosT
p p p p p p pm g = − Θ Φ Θ Φ Θ W (35)
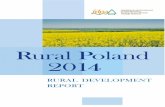
Figure 3 Parafoil Canopy Geometry [13, 14]
Equation 36 gives aerodynamic force on the payload from drag, which acts at the center of pressure of the payload assumed to be located at the payload’s center.
[ ]1, ,
2
Tb b
A b b D b b bAV C u v wρ= −F (36)
The payload frame components of the payload’s mass center velocity that appear in Equation 36 are computed using Equation 37.
[ ] [ ]TT T b b b b
b b b b w x y zU V W x y z ρ ρ ρ = + T S& & & (37)
The shape of the parafoil canopy is modeled by joining panels of the same cross section side by side at angles with respect to a horizontal plane. The i th panel of the parafoil canopy experiences lift and drag forces that are modeled using Equations 38 and 39, where ui ,vi ,wi are the velocity components of the center of pressure of the I- th canopy panel in the I- th canopy panel frame (Figure 3).
[ ]2 210
2
T
i i i i Li i iA u w C w uρ= + −L (38)
[ ]1
2
Tp
i i i Di i i iAVC u v wρ= −D (39)
Equation 40 provides the total aerodynamic force on the parafoil canopy.
( )1
n
A i i i
i=
= +∑F T L D (40)
The applied moment about the parafoil’s mass center contains contributions from the steady aerodynamic forces and the coupling joint’s resistance to twisting. The moment due to a panel’s steady aerodynamic forces is computed with a cross product between the distance vector from the mass center of the parafoil to the center of pressure of the panel and the force itself. Equation 23 gives the total moment from the steady aerodynamic forces.
( )1
i
nCP
A p i i i
i=
= +∑M S T L D (41)

160
1 0 0
0 cos sin
0 sin cos
i i l
i i
α αα α
= −
T (42)
The resistance to twisting of the coupling joint is modeled as a rotational spring and damper given by Equation 43.
( ) ( )
0
0C
C p b C p bK C
= Ψ −Ψ − Ψ −Ψ
M
& &% % % %
(43)
The angles pΨ% and bΨ% are the modified Euler yaw angles of the parafoil and payload
that come from a modified sequence of rotations where the Euler yaw angle is the final rotation. The Euler yaw angles pΨ% and bΨ% for the modified sequence of rotations
can be related to the original Euler angles by Equations 44 and 45.
sin sin cos cos sinarctan
cos cos
p p p p p
p
p p
Φ Θ Ψ − Φ ΨΨ = Θ Ψ % (44)
sin sin cos cos sinarctan
cos cos
b b b b bb
b b
Φ Θ Ψ − Φ ΨΨ = Θ Ψ % (45)
From the same modified sequence of rotations pΨ&% and bΨ&% are given in Equations
47 and 48.
cos tan sin tanp p p p p p p pP Q RΨ = − Ψ Θ + Ψ Θ +&% % % % % (46)
cos tan sin tanb b b b b b b bP Q RΨ = − Ψ Θ + Ψ Θ +&% % % % % (47)
cos sin cos sin sintan cos
cos cos
p p p p p
p p
p p
Φ Θ Ψ − Φ ΨΘ = Ψ
Θ Ψ% % (48)
cos sin cos sin sintan cos
cos cos
b b b b bb b
b b
Φ Θ Ψ − Φ ΨΘ = Ψ
Θ Ψ% % (49)
Given the state vector of the system, the 12 linear equations in Equation 22 are solved using LU decomposition and the equations of motion described above are numerically integrated using a fourth order Runge-Kutta algorithm to generate the trajectory of the system from it’s point of release.
3. Conclusions
Parafoil-load-systems vary a lot in configuration and geometry. So the results of this study can not be applied to other systems, at least the multi-body-model has to be reworked due to other geometry and other terms of inertia. Since the simulation environment is designed very modular, changes can be made easily, as well as enhancements and refinements.

161
Dynamic simulation models for flight mechanics of parafoil and payload aircraft most often employ a 6 or 9 DOF representation. During flight,the parafoil canopy is modeled as a rigid body. The affect of control inputs is idealized by deflection of parafoil brakes on the left and right side of the parafoil. For controllable parafoil and payload aircraft a dynamic model should include the effect of right and left parafoil brake deflection and canopy tilt to replicate system turning dynamics.
Acknowledgments The research described in this paper was supported by the Polish Ministry of Education and Sciences under grant number 0 T00B 020 30.
References
[1] Brown G.J.: “Parafoil Steady Turn Response to Control Input”, AIAA 93-1241CP. [2] Doherr K., Schiling H.: “9 DOF-simulation of Rotating Parachute Systems”, AIAA
12th. Aerodynamic Decelerator and Balloon Tech. Conf, 1991. [3] Greenwood D.T.: “Advanced Dynamics”, Cambridge University Press,
Cambridge, 2003. [4] Gupta M., et all: “Recent Advances in Structural Modeling of Parachute
Dynamics”, AIAA 2001-2030 CP, AIAA 16th Aerodynamic Decelerator Systems Technology Conference, May 2001.
[5] Gutowski R.: “Analytical Mechanics”, PWN, Warsaw, 1972. [6] Hailiang M.,Zizeng Q.: “9-DOF Simulation of Controllable Parafoil System for
Gliding and Stability”, Journal of National University of Defense Technology, Vol. 16 No. 2, pp. 49-54, 1994.
[7] Iacomini C.S., Cerimele C.J.: “Lateral-Directional Aerodynamics from a Large Scale Parafoil Test Program”, AIAA 99-1731 CP.
[8] Iacomini C.S., Cerimele, C.J.: “Longitudinal Aerodynamics from a Large Scale Parafoil Test Program”, AIAA 99-1732 CP.
[9] Iosilevskii G.: “Center of Gravity and Minimal Lift Coefficient Limits of a Gliding Parachute”, Journal of Aircraft, Vol. 32 No. 6, pp. 1297-1302, 1995.
[10] Kaminer I,I,, Yakimenko O.A: “Development of Control Algorithm for The Autonomous Gliding Delivery System”, AIAA-2003-2116 CP.
[11] Lavitt, M.O., "Fly-by-Wire Parafoil Can Deliver 1,100 lbs", Aviation Week and Space Technology, Vol.144 (14), 1996, pp.64-64.
[12] Lissaman P.B.S., Brown G.J.: “Apparent Mass Effects on Parafoil Dynamics”, AIAA 93-1236 CP.
[13] Slegers N., Costello M.: ”Comparison of Measured and Simulated Motion of a Controllable Parafoil and Payload System”, AIAA 2003-5611 CP.
[14] Slegers N., Costello M.: ” Model Predictive Control of a Parafoil and Payload System”, AIAA 2004-4822 CP.
[15] Strickert G.: “Study on the relative motion of parafoil-load-systems”, Aerospace Science and Technology, No 8, 2004, pp. 479–488.

162
[16] Wailes, W., and Hairington, N.: “The Guided Parafoil Airborne Delivery System Program”, Proceedings of the 13th AIAA Aerodynamic Decelerator Systems Technology Conference, Clearwater Beach, FL, May 15-18, 1995.
[17] Ware G.M., Hassell Jr. J.L.: “Wind-Tunnel Investigation of Ram-Air Inflated All-Flexible Wings of Aspect Ratios 1.0 to 3.0”, NASA TM SX-1923,1969.
[18] Witte l.: „Modellierung der Relativbewegung in einem Gleitschirm-Last-System“, IB 111-2000/43, Institute of Flight Research, DLR Braunschweig, 2000.
[19] Wolf D.: “Dynamic Stability of Nonrigid Parachute and Payload System”, Journal of Aircraft, Vol. 8 No. 8, pp. 603-609, 1971.
[20] Wyllie, T., "Parachute Recovery for UAV Systems," Aircraft Engineering and Aerospace Technology, vol.73 (6), 2001, pp.542-551.
[21] Wytlie, T., and Downs, P.: "Precision Parafoil Recovery - Providing Flexibility for Battlefield UAV Systems?", Proceedings of the 14th AIAA Aerodynamic Decelerator Systems Technology Conference, San Francisco, CA, June 3-5, 1997.
[22] Zhu Y., Moreau M., Accorsi M., Leonard J., Smith J.: “Computer Simulation of Parafoil Dynamics”, AIAA 2001-2005 CP, AIAA 16th Aerodynamic Decelerator Systems Technology Conference, May 2001.