wyklad
60
description
wyklad
Transcript of wyklad

Wykªad z Podstaw Teorii Sterowania Optymalnego
25 lutego 2009

Spis tre±ci
Wst¦p 2
1 Sformuªowanie zadania sterowania 31.1 Ukªad sterowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Sterowalno±¢ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Sterowanie optymalne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Przykªady . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4.1 Wydobycie zasobów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4.2 Produkcja i konsumpcja . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4.3 Strategia reprodukcji owadów spoªecznych . . . . . . . . . . . . . . . . . . 81.4.4 Wahadªo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4.5 L¡downik ksi¦»ycowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4.6 Poci¡g o nap¦dzie rakietowym . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Teoria sterowalno±ci 132.1 Wiadomo±ci wst¦pne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Sterowalno±¢ ukªadów liniowych . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 Globalna sterowalno±¢ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.2 Obserwowalno±¢ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.2.3 Zasada bang-bang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Sterowalno±¢ ukªadów nieliniowych . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Sterowanie czasooptymalne 313.1 Wprowadzenie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Czasooptymalna zasada maksimum Pontriagina . . . . . . . . . . . . . . . . . . . 33
4 Zasada mno»ników Lagrange'a 424.1 Kilka niezb¦dnych faktów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.2 Sformuªowanie zadania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera . . . . . . . . . . . . . . . . . . . . 464.4 Gªadkie zadanie z ograniczeniami typu równo±ci . . . . . . . . . . . . . . . . . . . 50
5 Zasada maksimum Pontriagina 525.1 Rachunek wariacyjny, równania Hamiltona . . . . . . . . . . . . . . . . . . . . . . 52
5.1.1 Równania Eulera-Lagrange'a . . . . . . . . . . . . . . . . . . . . . . . . . . 525.1.2 Zastosowanie do równa« Hamiltona . . . . . . . . . . . . . . . . . . . . . . 54
5.2 Sformuªowanie zasady maksimum Pontriagina . . . . . . . . . . . . . . . . . . . . 555.2.1 Ustalony czas, swobodny punkt ko«cowy . . . . . . . . . . . . . . . . . . . 555.2.2 Swobodny czas, ustalony punkt ko«cowy . . . . . . . . . . . . . . . . . . . 565.2.3 Zastosowania i przykªady . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57

Wst¦p
Zgodnie z ustaleniami na egzamin z Podstaw sterowania optymalnego, przyjmujemy w wykªadzienast¦puj¡c¡ konwencj¦:
• twierdzenia, które maj¡ w nazwie gwiazdk¦ (*) s¡ nieobowi¡zkowe (równie» ich dowody),podobnie dowody z gwiazdk¡ (sformuªowania tych twierdze« trzeba zna¢),
• dowody wyników, które maj¡ cyfr¦ (5) s¡ wymagane na ocen¦ bardzo dobr¡,
• pozostaªe dowody s¡ wymagane na ocen¦ dobr¡.
A oto lista wyników, dla których znajomo±¢ dowodów jest wymagana na ocen¦ bardzo dobr¡:
• twierdzenie 2.2.2 - charakteryzacja lokalnej sterowalno±ci ukªadów liniowych,
• twierdzenie 2.2.7 - zasada bang-bang,
• lemat 3.1.1 - wªasno±ci zbioru osi¡galno±ci dla ukªadu liniowego,
• lemat 3.2.1 - mówi¡cy, »e odpowied¹ ukªadu nie mo»e wyj±¢ z wn¦trza sto»ka osi¡galno±ciRC(x0) na jego brzeg,
• twierdzenie 3.2.3 - zasada maksimum dla sterowa« ekstremalnych,
• twierdzenie 3.2.8 - odwrócenie czasooptymalnej zasady maksimum,
• twierdzenie 4.3.1 - twierdzenie Kuhna-Tuckera.
2

1 SFORMUOWANIE ZADANIA STEROWANIA
1 Sformuªowanie zadania sterowania
1.1 Ukªad sterowania
Niech dany b¦dzie ukªad, którego dynamika (zachowanie wektora stanu x), przy danej funkcjisteruj¡cej u, opisana jest wektorowym równaniem ró»niczkowym postaci
x(t) = f(t, x(t), u(t)) (1.1.1)
z warunkiem pocz¡tkowymx(0) = x0, (1.1.2)
gdzie x(t), x0 ∈ Rn, u(t) ∈ Rm, f = (f 1, ..., fn) : [0,∞)×Rn×Rm → Rn (m, n s¡ ustalonymi licz-bami naturalnymi). Powy»sze równanie nazywa¢ b¦dziemy, z uwagi na wyst¦puj¡c¡ w nim funkcj¦steruj¡c¡ u (sterowanie), ukªadem sterowania lub równaniem stanu. O funkcji f zakªada¢ b¦dzie-my w dalszym ci¡gu, »e jest ci¡gªa na zbiorze [0,∞)×Rn×Rm wraz z pochodnymi cz¡stkowymi∂f i
∂xj, ∂f i
∂uk, i, j = 1, ..., n, k = 1, ...,m.
Niech Ω = [−1, 1] × ... × [−1, 1] ⊂ Rm. Symbolem UΩ oznacza¢ b¦dziemy zbiór postaci⋃t1>0UΩ[0, t1], gdzie
UΩ[0, t1] = u : [0, t1]→ Rm; u jest mierzalna na [0, t1]oraz u(t) ∈ Ω dla p.w. t ∈ [0, t1]
dla dowolnego t1 > 0.Symbolem UPC oznacza¢ b¦dziemy zbiór postaci
⋃t1>0UPC [0, t1], gdzie (1)
UPC [0, t1] = u ∈ UΩ[0, t1]; u jest kawaªkami staªa na [0, t1].
Symbolem UBB oznacza¢ b¦dziemy zbiór postaci⋃t1>0UBB[0, t1], gdzie
UBB[0, t1] = u ∈ UΩ[0, t1];∣∣∣uk(t)∣∣∣ = 1 dla p.w. t ∈ [0, t1], k = 1, ...,m.
Funkcje nale»¡ce do klasy UBB nazywa¢ b¦dziemy sterowaniami typu bang-bang. W przypadkugdy Ω jest przedziaªem [−1, 1], tzn. m = 1oznacza to, »e odbijamy (ang. bang - uderza¢) si¦ odjednej granicy zbioru Ω (np. −1) do drugiej (np. 1).
Symbolem UBBPC oznacza¢ b¦dziemy zbiór postaci⋃t1>0UBBPC [0, t1], gdzie
UBBPC [0, t1] = UBB[0, t1] ∩ UPC [0, t1].
Wdalszym ci¡gu, o ile nie b¦dzie powiedziane inaczej, ukªad (1.1.1) rozwa»a¢ b¦dziemy w klasiesterowa« UΩ. Dla skrócenia zapisu, klasy UΩ[0, t1], UΩ oznacza¢ b¦dziemy symbolami U [0, t1], U ,odpowiednio.
Jak wynika z okre±lenia powy»szych klas funkcja steruj¡ca nie musi by¢ ci¡gªa - jest to wartawspomnienia wªa±ciwo±¢ teorii sterowania optymalnego. Jak zauwa»ymy na dalszych wykªadachdopuszczalna funkcja steruj¡ca b¦dzie najcz¦±ciej przedziaªami ci¡gªa. A wi¦c dozwolone s¡ punkty
1Mówimy, »e funkcja u jest kawaªkami staªa na przedziale [0, t1], je±li istnieje podziaª 0 = τ0 < τ1 < ... < τl = t1przedziaªu [0, t1] (l ∈ N)taki, »e u jest funkcj¡ staª¡ na ka»dym podprzedziale (τi−1, τi), i = 1, ..., l.
3

1.1 Ukªad sterowania 1 SFORMUOWANIE ZADANIA STEROWANIA
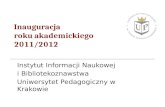
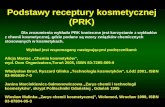
Rysunek 1: Wykres funkcji steruj¡cej i równania stanu
skokowej nieci¡gªo±ci, a nie s¡ dozwolone punkty nieci¡gªo±ci, w których u zbiega do niesko«czo-no±ci. Przykªadem takiego sterowania jest wª¡cznik/wyª¡cznik ±wiatªa. Ka»de wª¡cznie (u = 1) iwyª¡czenie (u = 0) jest skokiem funkcji steruj¡cej.
Z drugiej strony, równie» równanie stanu x() nie musi by¢ ró»niczkowalne na caªym przedziale[0, t1] (dla pewnego t1). Dopuszcza si¦ pewn¡ liczb¦ punktów zaªamania, jak to wida¢ na rysunku.Nale»y zauwa»y¢, »e ka»dy punkt zaªamania równania stanu wyst¦puje tam, gdzie jest skok funkcjisteruj¡cej.
Uwaga 1.1.1. Powy»sze zaªo»enia o funkcji f gwarantuj¡ w szczególno±ci lokalne istnienie ijednoznaczno±¢ rozwi¡zania ukªadu (1.1.1) speªniaj¡cego warunek pocz¡tkowy (1.1.2), przy do-wolnie ustalonym sterowaniu u ∈ U (2). Warto±¢ tego rozwi¡zania w punkcie t oznacza¢ b¦dziemysymbolem x(t;x0, u) lub xu(t) lub te» x(t), o ile nie b¦dzie to prowadziªo do nieporozumie«.
Uwaga 1.1.2.W przypadku ukªadu liniowego
x(t) = A(t)x(t) +B(t)u(t) (1.1.3)
z warunkiem pocz¡tkowym (1.1.2) rozwi¡zanie xu odpowiadaj¡ce sterowaniu u ∈ U [0, t1] istnieje ijest jednoznaczne na caªym przedziale [0, t1], o ile A, B s¡ funkcjami caªkowalnymi na przedziale[0, t1].
Zadanie sterowania dla ukªadu (1.1.1) (podobnie dla ukªadu (1.1.3)) polega na okre±leniupunktu x0 ∈ Rn i sterowania u ∈ U , dla których x(t1;x0, u) = 0 przy pewnym t1, nale»¡cym dodziedziny funkcji xu. Mówimy w takim przypadku, »e sterowanie u przeprowadza ukªad z punktupocz¡tkowego x0 do punktu 0.
2Przez rozwi¡zanie problemu Cauchy'ego (1.1.1)-(1.1.2), przy dowolnie ustalonym sterowaniu u ∈ U , rozumie-my funkcj¦ absolutnie ci¡gª¡ x = (x1, ..., xn) okre±lon¡ w pewnym prawostronnym domkni¦tym i ograniczonymotoczeniu punktu 0, speªniaj¡c¡ równanie p.w. na tym otoczeniu i tak¡, »e x(0) = x0. Oczywi±cie, dla zagwa-rantowania lokalnego istnienia i jednoznaczno±ci tego» rozwi¡zania, przy dowolnie ustalonym sterowaniu u ∈ U ,nie trzeba zakªada¢ istnienia i ci¡gªo±ci pochodnych cz¡stkowych ∂fi
∂uk- zaªo»enie to b¦dziemy wykorzystywa¢ w
dalszych rozwa»aniach, dotycz¡cych min. zagadnienia sterowalno±ci. Tak»e zaªo»enie ci¡gªo±ci funkcji f mo»nazast¡pi¢ sªabszymi warunkami.
4

1.2 Sterowalno±¢ 1 SFORMUOWANIE ZADANIA STEROWANIA
1.2 Sterowalno±¢
Niech dany b¦dzie ukªad sterowania (1.1.1). Zbiorem sterowalno±ci (odpowiadaj¡cym klasie ste-rowa« U) nazywa¢ b¦dziemy zbiór
SΩ=⋃t10
SΩ(t1),
gdzie
SΩ(t1) = x0 ∈ Rn; istnieje sterowanie u ∈ Utakie, »e x(t1;x0, u) = 0.
Zast¦puj¡c w powy»szej denicji klas¦ sterowa« U klas¡ UPC , UBB, UBBPC , deniuje si¦ zbiorySPC , SBB, SBBPC , odpowiednio.
Przykªad 1.2.1. Dla ukªadu sterowania
x(t) = −u(t)
wyznaczy¢ zbiory SΩ(t1) oraz SΩ.Caªkuj¡c równanie stronami na przedziale [0, t1], dostajemy∫ t1
0x(t)dt = −
∫ t1
0u(t)dt
x(t1)− x(0) = −∫ t1
0u(t)dt
i dalej
x0 =∫ t1
0u(t)dt+ x(t1).
Z denicji zbioru SΩ(t1) wynika, »e x0 nale»y do niego wtedy i tylko wtedy, gdy istnieje pewnafunkcja u ∈ U takie, »e
x0 =∫ t1
0u(t)dt.
Powy»szy warunek pozwala nam zauwa»y¢, »e w takim przypadku
|x0| = |∫ t1
0u(t)dt| ¬
∫ t1
0|u(t)|dt ¬
∫ t1
01dt = t1.
Tym samym zbiór SΩ(t1) zawiera si¦ w przedziale [−t1, t1]. Poka»emy, »e zachodzi równie» od-wrotna inkluzja.
1. x0 ∈ (0, t1]. W takim przypadku, x0 ∈ SΩ(t1) o ile istnieje u ∈ U takie, »e
x0 =∫ t1
0u(t)dt.
Poszukamy takiego sterowania. Zauwa»my, »e∫ t1
0u(t)dt =
∫ x0
0u(t)︸︷︷︸
1
dt+∫ t1
x0u(t)︸︷︷︸
0
dt.
St¡d za u wystarczy poªo»y¢
u(t) =
1, 0 ¬ t ¬ x0,0, x0 < t ¬ t1.
Doko«czy¢ ¢wiczenie.
5

1.3 Sterowanie optymalne 1 SFORMUOWANIE ZADANIA STEROWANIA
Zbiorem osi¡galno±ci w chwili t > 0 (przy ustalonym punkcie pocz¡tkowym x0 ∈ Rn) nazywa-my zbiór postaci
KΩ(t1;x0) = x = x(t1;x0, u) ∈ Rn; u ∈ U.Tak, jak poprzednio, zast¦puj¡c w powy»szej denicji klas¦ sterowa« U klas¡ UPC , UBB, UBBPC ,deniuje si¦ zbiory KPC(t1;x0), KBB(t1;x0), KBBPC(t1;x0), odpowiednio. Dla skrócenia zapisu,zbiory SΩ, SΩ(t1), KΩ(t1;x0) oznacza¢ b¦dziemy symbolami S, S(t1), K(t1;x0), odpowiednio.
Sto»kiem osi¡galno±ci (przy ustalonym punkcie pocz¡tkowym x0 ∈ Rn) nazywamy zbiór po-staci
RC(x0) = (t, x(t;x0, u) ∈ R+0 × Rn; t 0, u ∈ U.
wiczenie 1.2.1.Wyznaczy¢ zbiory K(t1;x0) oraz RC(x0) dla ukªadu z Przykªadu.
Podstawowymi zagadnieniami teorii sterowalno±ci s¡: wyznaczenie (opisanie wªasno±ci) zbio-ru sterowalno±ci (osi¡galno±ci) odpowiadaj¡cego danej klasie sterowa« oraz zbadanie zale»no±cimi¦dzy zbiorami sterowalno±ci (osi¡galno±ci) odpowiadaj¡cymi ró»nym klasom sterowa«.
1.3 Sterowanie optymalne
Rozwa»my teraz ukªad sterowania (1.1.1) z warunkiem pocz¡tkowym (1.1.2) (x0 6= 0) i z funkcjo-naªem postaci
J(u) =∫ tu
0F (t, xu(t), u(t))dt, (1.3.1)
gdzie F : [0,∞)× Rn × Rm → R, okre±lonym na zbiorze
∆ = u ∈ U ; istnieje tu > 0 takie, »e u ∈ U [0, tu]oraz x(tu;x0, u) = 0.
6

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
Sterowania nale»¡ce do zbioru ∆ nazywa¢ b¦dziemy sterowaniami dopuszczalnymi, b¡d¹ prze-prowadzaj¡cymi ukªad z punktu x0 do punktu 0, natomiast funkcjonaª J - funkcjonaªem kosztu(wypªaty) lub wska¹nikiem jako±ci.
Zagadnienie sterowania optymalnego polega na wybraniu, o ile to mo»liwe, sterowania u∗ ∈ ∆takiego, »e
J(u∗) ¬ J(u) (1.3.2)
dla dowolnego u ∈ ∆ (staramy si¦ zminimalizowa¢ koszty)(3).Podstawowymi zagadnieniami teorii sterowania optymalnego s¡:
1. istnienie sterowania optymalnego,
2. matematyczna charakteryzacja sterowania optymalnego,
3. wyznaczenia sterowania optymalnego.
1.4 Przykªady
W nast¦puj¡cym paragrae przedstawimy kilka przykªadów równa«, w których pojawiaj¡ si¦ funk-cje steruj¡ce. Pozwoli nam to zaobserwowa¢ sytuacje,w których parametr funkcyjny mo»emy na-zwa¢ funkcj¡ steruj¡c¡.
1.4.1 Wydobycie zasobów
Zaªó»my, »e w pewnej gospodarce mamy zapas wyczerpywalnych zasobów x (mo»e to by¢ w¦giel,czy ropa naftowa), gdzie x(0) = x0. W trakcie wydobywania ich zapasy zmniejszaj¡ si¦ wedªugwzoru:
x(t) = −u(t),
gdzie u(t) oznacza stop¦ wydobycia w czasie t. Dlaczego w tym przypadku mo»emy u(t) nazwa¢funkcj¡ steruj¡c¡? Po pierwsze jest ona uwarunkowana naszym wyborem. Po drugie, wybór u(t)wpªywa na zmienn¡ stanu x(t). Mo»emy wi¦c u(t) traktowa¢ jako mechanizm steruj¡cy, którymmo»emy manewrowa¢ tak, aby doprowadzi¢ stan x(t) do okre±lonych poªo»e« w dowolnym cza-sie t. Poprzez kierowanie tak¡ funkcj¡, mo»emy d¡»y¢ do optymalizacji kryterium wydajno±ciwyra»onego w funkcjonale celu. W naszym przypadku mo»emy przyj¡¢, »e spoªecze«stwo d¡»ydo maksymalizacji caªkowitej u»yteczno±ci ze zu»ycia wyczerpywalnych zasobów w ci¡gu danegookresu czasu [0, T ]. Zadanie optymalizacji mo»e przyj¡¢ posta¢:
Maksymalizacja∫ T
0F (u(t))e−ρtdt
pod warunkiem x(t) = −u(t)oraz x(0) = x0, x(T ) swobodne (T, x0 dane).
W tym przypadku tylko funkcja steruj¡ca znalazªa si¦ w funkcjonale celu. Ogólnie jednak funk-cjonaª ten b¦dzie zale»aª od zmiennej stanu i funkcji steruj¡cej.
3Mo»na oczywi±cie nierówno±¢ J(u∗) ¬ J(u) zast¡pi¢ nierówno±ci¡ przeciwn¡. Jest rzecz¡ jasn¡, »e nie majako±ciowej ró»nicy mi¦dzy takimi zadaniami. W takim przypadku powiemy raczej, »e J jest funkcjonaªem wypªaty.
7

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
1.4.2 Produkcja i konsumpcja
Zaªó»my, »e mamy fabryk¦, której produkcj¡ mo»emy sterowa¢. Stwórzmy jej prosty matematycznymodel oznaczaj¡c
x (t) - ilo±¢ towaru wyprodukowanego w czasie t 0.
Zakªadamy te», »e konsumujemy cz¦±¢ produkcji w ka»dym czasie i »e mo»emy zainwestowa¢pozostaª¡ cz¦±¢. Oznaczmy
u (t) - cz¦±¢ produkcji zainwestowana powtórnie w czasie t 0.
To b¦dzie nasze sterowanie, które b¦dzie poddane naturalnemu ograniczeniu
0 ¬ u (t) ¬ 1
dla dowolnej chwili t 0. Maj¡c tak okre±lone sterowanie dynamika naszego modelu b¦dzie dananast¦puj¡cym równaniem ró»niczkowym zwyczajnym
x (t) = ku (t)x (t) ,x (0) = x0.
Staªa k > 0 wyra»a wspóªczynnik naszej inwestycji. Jako funkcjonaª wypªaty we¹miemy
J(u) =∫ T
0(1− u (t))x (t) dt.
Jego znaczenie jest takie, »e chcemy zmaksymalizowa¢ nasz¡ konsumpcj¦ (zysk), a jest ona danaformuª¡ (1− u (t))x (t).
Model pasuje do naszych oznacze« po przyj¦ciu
Ω = [0, 1] ,f (t, x, u) = kux,
F (t, x, u) = (1− u)x.
Jak si¦ pó¹niej oka»e sterowanie optymalne jest dane przez
u∗ (t) =
1 dla 0 ¬ t ¬ t∗,0 dla t∗ ¬ t ¬ T,
dla pewnego czasu przeª¡czenia 0 ¬ t∗ ¬ T . Innymi sªowy, powinni±my inwestowa¢ caª¡ produk-cj¦ (i nic nie konsumowa¢) do pewnego czasu t∗ i potem skonsumowa¢ wszystko (i nic ju» nieinwestowa¢). Czas przeª¡czenia mo»na okre±li¢.
1.4.3 Strategia reprodukcji owadów spoªecznych
Spróbujmy stworzy¢ model reprodukcji owadów spoªecznych np. pszczóª. Niech T oznacza dªugo±¢sezonu, oznaczmy równie» przez
w (t) - liczb¦ robotnic w czasie t,
q (t) - liczb¦ królowych w czasie t,
u (t) - wspóªczynnik charakteryzuj¡cy wysiªek kolonii
zmierzaj¡cy do zwi¦kszenia zasobu robotnic.
8

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
Sterowanie u jest poddane pewnym ograniczeniom, tzn.
0 ¬ u (t) ¬ 1.
Dynamika opisuj¡ca liczb¦ robotnic jest dana równaniemw (t) = −µw (t) + bs (t)u (t)w (t) ,
w (0) = w0.
Staªa µ oznacza tzn. wspóªczynnik umieralno±ci, b jest inna staªa, a s (t) jest znanym wspóªczyn-nikiem z jakim ka»da robotnica przyczyni si¦ do rozwoju spoªeczno±ci pszczóª.
Populacja królowych zmienia si¦ zgodnie z dynamik¡q (t) = −νq (t) + cs (t) (1− u (t))w (t) ,
q (0) = q0,
gdzie ν i c s¡ podobnie jak poprzednio pewnymi staªymi.Nasze zadanie, lub raczej pszczóª, to zmaksymalizowa¢ liczb¦ królowych w czasie T :
J(u) = q (T ) .
Jak zobaczymy pó¹niej, odpowiedzi¡ b¦dzie tu równie» sterowanie typu bang-bang.
1.4.4 Wahadªo
Przyjrzyjmy si¦ wisz¡cemu wahadªu, gdzie
θ (t) - oznacza k¡t w czasie t.
Je±li nie ma zewn¦trznej siªy, to mamy nast¦puj¡ce równanie ruchuθ (t) + λθ (t) + ω2θ (t) = 0,θ (0) = θ1, θ (0) = θ2.
Pami¦tajmy, »e ogólne równanie wahadªa jest postaci
ml2θ (t) + λθ (t) +mgl sin θ (t) = 0,
9

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
gdzie
l - dªugo±¢ nici,
g - przyspieszenie ziemskie,
m - masa ciaªa,
λ - wspóªczynnik oporu o±rodka
Równania w postaci ogólnej nie da si¦ rozwi¡za¢ analitycznie. Rozwi¡zanie przybli»one (dla maªychwychyle«) otrzymujemy przez zastosowanie przybli»enia sin θ ≈ θ. Wtedy
θ (t) ≈ C1 sinωt+ C2 cosωt,
gdzie ω = 2πT
=√
gl, T = 2π
√lg. Staªe C1 i C2 zale»¡ od warunków pocz¡tkowych.
Wró¢my do naszego zadania. Niech u oznacza siª¦ hamuj¡c¡, gdzie
|u (t)| ¬ 1
dla t 0. Nasza dynamika przybiera posta¢θ (t) + λθ (t) + ω2θ (t) = u (t) ,
θ (0) = θ1, θ (0) = θ2.
Oznaczmy przez x1 (t) = θ (t), x2 (t) = θ (t) oraz x (t) = (x1 (t) , x2 (t)). Nasze równanie mo»emywtedy zapisa¢ w postaci ukªadu
x (t) =[x1 (t)x2 (t)
]=[
x2 (t)−λx2 (t)− ω2x1 (t) + u (t)
]= f (x (t) , u (t)) .
10

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
Funkcjonaª kosztu ma tu posta¢
J(u) =∫ τ
01dt = τ,
gdzie τ = τ (u) oznacza czas zatrzymania wahadªa, czyli x (τ) = 0 (θ (t) = θ (t) = 0). Chce-my zminimalizowa¢ J , co oznacza, »e szukamy najkrótszego czasu do zatrzymania wahadªa. Tenproblem ma troch¦ inn¡ form¦, czas ko«cowy nie jest dany, raczej zale»y on od sterowania. Takasytuacja okre±lona jest jako zadanie z ustalonym punktem ko«cowym i swobodnym czasem.
1.4.5 L¡downik ksi¦»ycowy
W tym modelu mamy za zadanie mi¦kko wyl¡dowa¢ na powierzchni ksi¦»yca, zu»ywaj¡c jaknajmniej paliwa.
Przyjmiemy oznaczenia:
h (t) - wysoko±¢ w czasie t,
v (t) - pr¦dko±¢ (h (t) ),m (t) - masa statku (zmienia si¦ podczas spalania paliwa),
u (t) - ci¡g w czasie t.
Zaªó»my, »e0 ¬ u (t) ¬ 1.
Z zasad dynamiki Newtona wynika, »e równanie ruchu wygl¡da nast¦puj¡co
m (t) h (t) = −m (t) g + u (t) ,
prawa strona jest ró»nic¡ siªy grawitacji (ci¦»ko±ci) i ci¡gu rakiety. Ten model mo»e by¢ zapisanyw postaci ukªadu równa« ró»niczkowych zwyczajnych
v (t) = −g + u(t)m(t) ,
h (t) = v (t) ,m (t) = −ku (t) .
11

1.4 Przykªady 1 SFORMUOWANIE ZADANIA STEROWANIA
Zapiszmy ten ukªad w formiex (t) = f (x (t) , u (t)) ,
gdzie x (t) = (v (t) , h (t) ,m (t)). Chcemy zminimalizowa¢ ilo±¢ zu»ytego paliwa, a to oznaczazmaksymalizowa¢ mas¦ pojazdu po wyl¡dowaniu. St¡d
J(u) = m (τ) ,
gdzie τ oznacza czas wyl¡dowania, tzn. h (τ) = v (τ) = 0. To jest zadanie ze swobodnym czasem,mamy równie» dodatkowe warunki
h (t) 0, m (t) 0.
1.4.6 Poci¡g o nap¦dzie rakietowym
Wyobra¹my sobie poci¡g z silnikami odrzutowymi po obu stronach.
Przyjmiemy oznaczenia:
q (t) - pozycja w czasie t,
v (t) = q (t) - pr¦dko±¢ w czasie t,
u (t) - ci¡g rakiet, − 1 ¬ u (t) ¬ 1 znak zale»y od tego,
który silnik jest wª¡czony.
Chcemy tak pokierowa¢ silnikami, aby dojecha¢ do punktu 0 z pr¦dko±ci¡ zerow¡ w jak najkrót-szym czasie. Zakªadaj¡c, »e poci¡g ma mas¦ m, prawo jego ruchu jest nast¦puj¡ce
mq (t) = u (t) .
Znów oznaczamy x (t) = (q (t) , v (t)) i przyjmijmy m = 1. Wtedy x (t) =[
0 10 0
]x (t) +
[01
]u (t)
x (t0) = x0 = (q0, v0)T .
Poniewa» naszym celem jest dosterowa¢ do punktu (0, 0) w najkrótszym czasie, wi¦c
J(u) =∫ τ
01dt = τ
dla τ równego czasowi dotarcia do celu (q (τ) = v (t) = 0).
12

2 TEORIA STEROWALNOCI
2 Teoria sterowalno±ci
2.1 Wiadomo±ci wst¦pne
W tym paragrae rozwa»a¢ b¦dziemy nast¦puj¡cy autonomiczny (4) ukªady sterowania
x(t) = f(x(t), u(t)). (2.1.1)
O funkcji f = (f 1, ..., fn) : Rn × Rm → Rn zakªada¢ b¦dziemy, »e jest klasy C1 na Rn × Rm if(0, 0) = 0.
Lemat 2.1.1. Dla ukªadu (2.1.1) zachodz¡ nast¦puj¡ce wªasno±ci:1) Je±li sterowanie u : [0, t1] 3 t 7→ u(t) ∈ Rm przeprowadza ukªad (2.1.1) z punktu x0 do punktu0 na przedziale [0, t1], to dla dowolnego t0 > 0 sterowanie v : [t0, t0 + t1] 3 t 7→ u(t − t0) ∈ Rm
przeprowadza ten ukªad z punktu x0 do punktu 0 na przedziale [t0, t0 + t1].2) Je±li x0 ∈ S (x0 6= 0), gdzie S jest zbiorem sterowalno±ci dla ukªadu (2.1.1), tzn. istniej¡ t1 > 0i sterowanie u ∈ U takie, »e
x(t1;x0, u) = 0,
to dla dowolnego t∗ ∈ (0, t1) istniej¡ t2 > 0 oraz sterowanie u ∈ U takie, »e
x(t2;x(t∗;x0, u), u) = 0,
tzn.xu(t∗) = x(t∗;x0, u) ∈ S.
3) Je±li xu jest rozwi¡zaniem ukªadu (2.1.1) odpowiadaj¡cym sterowaniu u speªniaj¡cym warunki
xu(0) = x0, xu(t1) = x1,
to z(t) = x(t1 − t) jest rozwi¡zaniem ukªadu
z(t) = −f(z(t), u(t)) (2.1.2)
odpowiadaj¡cym sterowaniu u(t) = u(t1 − t) i speªniaj¡cym warunki
z(0) = x1, z(t1) = x0.
Oznacza to, »e zbiór stanów, które mo»na dosterowa¢ w chwili t1 ukªadem (2.1.1) do ustalonegopunktu x1 jest taki sam, jak zbiór punktów, które mo»na osiagn¡¢ w chwili t1 ukªadem (2.1.2),startuj¡c z punktu x1.
Uwaga 2.1.1.Wªasno±¢ (2) nie przysªuguje ukªadom nieautonomicznym.
Dowód. 1. Niech xu b¦dzie trajektori¡ ukªadu (2.1.1) odpowiadaj¡c¡ sterowaniu u. W szczegól-no±ci,
xu(0) = x0, xu(t1) = 0.
Wówczas, je±li y(t) = x(t− t0), to
y(t) = x(t− t0) = f(x(t− t0), u(t− t0)) = f(y(t), v(t))
4Przez ukªad autonomiczny rozumiemy taki ukªad sterowania, którego prawa strona nie zale»y od zmiennej t.
13

2.1 Wiadomo±ci wst¦pne 2 TEORIA STEROWALNOCI
dla p.w. t ∈ [t0, t0 + t1] orazy(t0) = x(t0 − t0) = x(0) = x0,
y(t0 + t1) = x(t0 + t1 − t0) = 0.
2. Wystarczy przyj¡¢u : [0, t1 − t∗] 3 t 7→ u(t+ t∗) ∈ Ω
i zauwa»y¢, »e funkcjay : [0, t1 − t∗] 3 t 7→ x(t+ t∗;x0, u) ∈ Rn
jest rozwi¡zaniem ukªadu (2.1.1) odpowiadaj¡cym sterowaniu u:
y(t) = x(t+ t∗;x0, u) = f(x(t+ t∗;x0, u), u(t+ t∗)) = f(y(t), u(t))
dla p.w. t ∈ [0, t1 − t∗]. Ponadto
y(0) = x(0 + t∗;x0, u) = xu(t∗),
y(t1 − t∗) = x(t1 − t∗ + t∗;x0, u) = 0.
3. Rzeczywi±cie, mamy
z(t) =d
dt(x(t1 − t)) = −x(t1 − t) = −f(x(t1 − t), u(t1 − t)) = −f(z(t), u(t)).
Ponadtoz(0) = x(t1) = x1, z(t1) = x(0) = x0.
Na zako«czenie rozwa»a« tego paragrafu udowodnimy twierdzenie, które charakteryzuje pewn¡wªasno±¢ zbioru S, natury topologicznej.
14

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Twierdzenie 2.1.1. Zbiór S jest otwarty wtedy i tylko wtedy, gdy 0 ∈ intS.
Dowód. Z faktu, »e S jest otwarty natychmiast wynika, »e 0 ∈ intS (bowiem 0 ∈ S).Przypu±¢my wi¦c, »e 0 ∈ intS, tzn. istnieje staªa δ > 0 taka, »e B(0, δ) ⊂ S (symbolem
B(0, δ) oznaczamy kul¦ w przestrzeni Rn, o ±rodku w punkcie 0 i promieniu δ). Niech x∗ ∈ S.Przynale»no±¢ funkcji f do klasy C1 implikuje ci¡gª¡ zale»no±¢ rozwi¡za« równania (2.1.1) odwarunku pocz¡tkowego. St¡d w szczególno±ci wynika, »e istnieje staªa δ1 > 0 taka, »e je±li x ∈B(x∗, δ1), to (przy ustalonym sterowaniu u∗ przeprowadzaj¡cym punkt x∗ do punktu 0)
x(t∗; x, u∗) ∈ B(0, δ).
Zatem, z uwagi na fakt, »e B(0, δ) ⊂ S, istnieje sterowanie u, które przeprowadza punkt x(t∗; x, u∗)do punktu 0 na pewnym przedziale [0, t]. W konsekwencji, sterowanie
u(t) =
u∗(t) je±li t ∈ [0, t∗],u(t− t∗) je±li t ∈ (t∗, t∗ + t]
przeprowadza punkt x do punktu 0, czyli x ∈ S. Z dowolno±ci punktu x ∈ B(x∗, δ1) wynika, »eB(x∗, δ1) ⊂ S.
W przypadku, gdy 0 ∈ intS, mówimy, »e ukªad jest lokalnie sterowalny.
2.2 Sterowalno±¢ ukªadów liniowych
Oznaczmy przez M (n×m) zbiór wszystkich macierzy o n wierszach i m kolumnach. Rozwa»mynast¦puj¡cy autonomiczny liniowy ukªad sterowania
x(t) = Ax(t) +Bu(t), (2.2.1)
gdzie macierze A i B s¡ staªe (nie zale»¡ od t) i A ∈M (n× n), B ∈M(n×m), odpowiednio. Wtym paragrae zbadamy niektóre wªasno±ci zbioru sterowalno±ci S(t1).
Przypomnijmy, i» rozwi¡zanie ukªadu (2.2.1) odpowiadaj¡ce sterowaniu u ∈ U [0, t1] (t1 > 0) ispeªniaj¡ce warunek pocz¡tkowy
x(0) = x0,
dane jest nast¦puj¡cym wzorem (formuª¡ Cauchy'ego)
x(t;x0, u) = X(t)x0 +X(t)∫ t
0X−1(s)Bu(s)ds
dla t ∈ [0, t1], gdzie X : [0, t1]→M(n× n) jest jedynym rozwi¡zaniem równaniaX(t) = AX(t)X(0) = I.
Funkcj¦ macierzow¡ X nazywamy macierz¡ fundamentaln¡ ukªadu (2.2.1) i czasem b¦dziemy pisa¢
X(t) = eAt =∞∑k=0
Aktk
k!,
ostatnia formuªa jest denicj¡ macierzy wykªadniczej eAt.
15

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Zauwa»my, »e x0 ∈ S(t) wtedy i tylko wtedy, gdy istnieje sterowanie u ∈ U [0, t] takie, »e
0 = X(t)x0 +X(t)∫ t
0X−1(s)Bu(s)ds.
Powy»szy warunek jest równowa»ny temu, »e
x0 = −∫ t
0X−1(s)Bu(s)ds (2.2.2)
Twierdzenie 2.2.1 (Struktura zbioru sterowalno±ci).(i) Zbiór sterowalno±ci S dla ukªadu (2.2.1) jest symetryczny i wypukªy.(ii) Je±li x0 ∈ S(t), to x0 ∈ S(t) dla wszystkich t t.
Dowód. Symetria. Niech t 0 i x0 ∈ S(t). Wtedy z (2.2.2) wynika, »e x0 = −∫ t
0 X−1(s)Bu(s)ds
dla pewnego u ∈ U [0, t]. St¡d −x0 = −∫ t
0 X−1(s)B(−u(s))ds oraz −u ∈ U [0, t], poniewa» U [0, t]
jest symetryczny. Wi¦c −x0 ∈ S(t), co oznacza, »e ka»dy zbiór S(t) jest symetryczny. W konse-kwencji S równie» jest symetryczny.
Wypukªo±¢. We¹my x0, x0 ∈ S takie, »e x0 ∈ S(t), x0 ∈ S(t) dla pewnych czasów t, t 0.Zaªó»my, »e t ¬ t. Wtedy
x0 = −∫ t
0X−1(s)Bu(s)ds dla pewnego sterowania u ∈ U [0, t],
x0 = −∫ t
0X−1(s)Bu(s)ds dla pewnego sterowania u ∈ U [0, t].
Zdeniujmy nowe sterowanie
u(s) :=u(t) dla 0 ¬ s ¬ t,0 dla s > t.
Wtedy
x0 = −∫ t
0X−1(s)Bu(s)ds,
czyli x0 ∈ S(t). Niech teraz λ ∈ [0, 1], zauwa»my, »e
λx0 + (1− λ)x0 = −∫ t
0X−1(s)B(λu(s) + (1− λ)u(s))ds.
St¡d λx0 + (1− λ)x0 ∈ S(t) ⊂ S.Warunek (ii) wynika z powy»szych rozwa»a«.
Uwaga 2.2.1. Powy»sze twierdzenie jest prawdziwe dla dowolnej symetrycznej i wypukªej klasysterowa«. W szczególno±ci jest ono prawdziwe dla klasy UPC .
Przykªad 2.2.1. Niech n = 2 i m = 1. Rozwa»my ukªadx1(t) = 0
x2(t) = u(t).
Jest to ukªad postaci (2.2.1) dla
A =[
0 00 0
], B =
[01
].
atwo wida¢, »e w tym przypadku S = (x1, x2);x1 = 0. Wi¦c zbiór S pokrywa si¦ z osi¡ x2.
16

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Macierz¡ sterowalno±ci dla ukªadu (2.2.1) nazywamy n× (n ·m) - wymiarow¡ macierz postaci
M = [B | AB | A2B | ... | An−1B].
Twierdzenie 2.2.2. Nast¦puj¡ce warunki s¡ równowa»ne:
(a) rankM = n,
(b) ukªad jest lokalnie sterowalny,
(c) zbiór S jest otwarty.
Dowód. (5) (b)=⇒(a). Zaªó»my, »e 0 ∈ intS i przypu±¢my, »e rankM < n. Istnieje wi¦c wektory ∈ Rn r 0 prostopadªy do ka»dej kolumny macierzy sterowalno±ci M . St¡d wynika, »e
yTAkB = 0 (2.2.3)
dla k = 0, 1, ..., n − 1. Poka»emy, »e powy»sza równo±¢ zachodzi dla wszystkich caªkowitych inieujemnych k. Oznaczmy wielomian charakterystyczny macierzy A symbolem p(λ), tzn. p(λ) =det(A− λI). Z twierdzenia Cayley'a - Hamiltona wynika, »e
p(A) = 0.
A wi¦c je±li napiszemyp(λ) = λn + βn−1λ
n−1 + . . .+ β1λ1 + β0,
gdzie β1, . . . , βn s¡ pewnymi staªymi rzeczywistymi, to
p(A) = An + βn−1An−1 + . . .+ β1A+ β0I = 0.
W konsekwencjiAn = −βn−1A
n−1 − βn−2An−2 − . . .− β1A− β0I
orazyTAnB = yT
(−βn−1A
n−1 − βn−2An−2 − ...− β0I
)B = 0.
Podobnie, yTAn+1B = yT (−βn−1An − βn−2A
n−1 − ...− β0A)B = 0. Wi¦c (2.2.3) zachodzi dlawszystkich caªkowitych i nieujemnych k.
Poniewa»
e−As =∑∞
k=0
(−1)kAk
k!sk,
wi¦c z powy»szegoyT e−AsB = 0. (2.2.4)
Zaªó»my, »e x0 ∈ S(t1). Jest to równowa»ne temu, »e istnieje sterowanie u ∈ U [0, t1] takie, »e
x0 = −∫ t1
0e−AsBu(s)ds. (2.2.5)
Z równo±ci (2.2.4) wynika wi¦c, »e
y · x0 = −∫ t1
0yT e−AsBu(s)ds = 0.
17

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
To znaczy, »e y jest prostopadªy do x0. Innymi sªowy, S musi le»e¢ w hiperpªaszczy¹nie prostopadªejdo y 6= 0. Oznacza to, »e 0 /∈ intS. Otrzymana sprzeczno±¢ z zaªo»eniem (b) dowodzi prawdziwo±ciimplikacji (b)=⇒(a).
(a)=⇒(b). Zaªó»my teraz, »e rankM = n i przypu±¢my, »e 0 /∈ intS. A wi¦c
0 /∈ intS(t1)
dla dowolnego t1 > 0. Z drugiej strony0 ∈ S(t1)
dla dowolnego t1 > 0. Zatem 0 jest punktem brzegowym zbioru S(t1) przy dowolnie ustalonymt1 > 0. Poniewa» S(t1) jest zbiorem wypukªym, wi¦c z analizy wypukªej wynika, »e istnieje hi-perpªaszczyzna podpieraj¡ca S(t1) w zerze, czyli istnieje niezerowy wektor b (zale»ny od t1) taki,»e
b · x0 ¬ 0
dla dowolnego x0 ∈ S(t1). W konsekwencji, wobec (2.2.5),∫ t1
0bT e−AsBu(s)ds 0
dla dowolnego u ∈ U [0, t1].St¡d wynika, »e (¢wiczenie)
bT e−AsB ≡ 0. (2.2.6)
Przyjmuj¡c w powy»szej równo±ci s = 0 otrzymujemy bTB = 0. Ró»niczkuj¡c (2.2.6) wzgl¦dems, dostaniemy, »e
bT (−A) e−AsB ≡ 0.
Przyjmuj¡c s = 0 otrzymujemy bTAB = 0. Kontynuuj¡c ró»niczkowanie, wnioskujemy, »e
bTAkB = 0 dla k = 0, 1, . . .
i w konsekwencji bTM = 0. St¡d w szczególno±ci wynika, »e niezerowy wektor b jest ortogonalnydo wszystkich kolumn macierzy sterowalno±ci M . A wi¦c rankM < n. Otrzymana sprzeczno±¢ zzaªo»eniem (a) dowodzi prawdziwo±ci implikacji (a)=⇒(b).
Równowa»no±¢ (b)⇐⇒(c) wynika z twierdzenia 2.1.1.
Lemat 2.2.1. Zaªó»my, »e ∫ t
0bT e−AsBu(s)ds 0 (2.2.7)
dla dowolnego u ∈ U [0, t]. WtedybT e−AsB ≡ 0.
Dowód. Wstawiaj¡c −u w miejsce u do (2.2.7), widzimy, »e∫ t
0bT e−AsBu(s)ds = 0
dla dowolnego u ∈ U [0, t]. Zdeniujmy
v (s) = bT e−AsB.
18

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Je±li v 6≡ 0, to v (s0) 6= 0 dla pewnego s0. St¡d, wobec ci¡gªo±ci funkcji s 7→ e−As, istnieje przedziaªI taki, »e s0 ∈ I oraz v 6= 0 na I. Zdeniujmy u ∈ U [0, t] jako
u (s) =
0, s /∈ I,1√nv(s)|v(s)| s ∈ I,
gdzie |v| =(∑n
i=1 |vi|2) 12 . Wtedy
0 =∫ t
0v (s) · u (s) ds =
∫I
v (s)√n· v (s)|v (s)|
ds =1√n
∫I|v (s)| ds.
St¡d wynika sprzeczno±¢, »e v ≡ 0 na I.
2.2.1 Globalna sterowalno±¢
Zajmiemy si¦ teraz jednym z podstawowych zada« teorii sterowalno±ci, a mianowicie: kiedy S =Rn? W przypadku, gdy dla danego ukªadu S = Rn, mówi¢ b¦dziemy, »e ukªad jest globalniesterowalny.
Twierdzenie 2.2.3. Zaªó»my, »e rankM = n. Je±li Reλ < 0 dla ka»dej warto±ci wªasnej λmacierzy A, to ukªad (2.2.1) jest globalnie sterowalny.
Dowód. Z twierdzenia 2.2.2 wynika, »e istnieje staªa δ > 0 taka, »e B(0, δ) ⊂ S. Ustalmy dowolnypunkt x0 ∈ Rn i rozwa»my rozwi¡zanie x(t;x0;u) ukªadu (2.2.1) dla u ≡ 0. Jest to oczywi±cierozwi¡zanie ukªadu jednorodnego
x(t) = Ax(t)
speªniaj¡ce warunek pocz¡tkowyx(0) = x0.
Klasyczny wynik o stabilno±ci dla liniowego ukªadu autonomicznego jednorodnego orzeka, »e je±liReλ < 0 dla ka»dej warto±ci wªasnej macierzy A, to rozwi¡zanie x powy»szego zadania speªnianast¦puj¡cy warunek
limt→∞|x(t)| = 0.
A zatem, w naszym przypadkulimt→∞|x(t;x0;u)| = 0.
Istnieje wi¦c t > 0 takie, »ex(t;x0;u) ∈ B(0, δ) ⊂ S.
W konsekwencji, istnieje t1 > 0 i sterowanie u ∈ U [0, t1] przeprowadzaj¡ce ukªad (2.2.1) z punktux(t;x0;u) do punktu 0 na przedziale [0, t1]. Z lematu 2.1.1 wynika, »e sterowanie u(t) = u(t − t)przeprowadza ukªad (2.2.1) z punktu x(t;x0;u) do punktu 0 na przedziale [t, t + t1]. Ostateczniewi¦c, sterowanie
u∗ : [0, t+ t1] 3 t 7→
0 je±li t ∈ [0, t],u(t) je±li t ∈ (t, t+ t1]
nale»¡ce do klasy U , przeprowadza ukªad (2.2.1) z punktu x0 do punktu 0 na przedziale [0, t+ t1].Oznacza to, »e x0 ∈ S, co ko«czy dowód twierdzenia.
Okazuje si¦, »e powy»szy wynik mo»na wzmocni¢. Prawdziwe jest bowiem nast¦puj¡ce
19

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Twierdzenie 2.2.4. Dla ukªadu (2.2.1) nast¦puj¡ce warunki s¡ równowa»ne:
(a) ukªad jest globalnie sterowalny,
(b) rankM = n oraz Reλ ¬ 0 dla ka»dej warto±ci wªasnej λ macierzy A.
Dowód. (*)1. Je±li S 6=Rn, to z wypukªo±ci S (na podstawie twierdzenia o hiperpªaszczy¹nie podpieraj¡cej
patrz [1]) wynika, »e istniej¡ wektor b 6= 0 i liczba rzeczywista µ takie, »e
b · x0 ¬ µ (2.2.8)
dla wszystkich x0 ∈ S. Poka»emy, »e jest to sprzeczne z zaªo»eniami.2. Dla danych b 6= 0, µ ∈ R postaramy si¦ znale¹¢ x0 takie, »e (2.2.8) nie zachodzi. Przy-
pomnijmy, »e x0 ∈ S wtedy i tylko wtedy, je±li istniej¡ czas t > 0 i sterowanie u ∈ U takie,»e
x0 = −∫ t
0X−1(s)Bu(s)ds.
St¡d
b · x0 = −∫ t
0bTX−1(s)Bu(s)ds.
Zdeniujmyv (s) := bTX−1(s)B.
3. Poka»emy, »ev 6≡ 0. (2.2.9)
W tym celu, zaªó»my przeciwnie, »e v ≡ 0. Wtedy ró»niczkuj¡c k-krotnie wyra»enie bTX−1(s)Bwzgl¦dem s i wstawiaj¡c s = 0 dostaniemy, »e
bTAkB = 0
dla k = 0, 1, 2, . . .. To implikuje, »e b jest ortogonalny do kolumn macierzy M , wi¦c rankM < n.Jest to sprzeczne z naszymi zaªo»eniami, wi¦c (2.2.9) zachodzi.
4. Nast¦pnie, zdeniujmy sterowanie
u (s) =− v(s)|v(s)| dla v (s) 6= 0,
0 dla v (s) = 0.
W takim razie
b · x0 = −∫ t
0v (s)u (s) ds =
∫ t
0|v (s)| ds.
Chcemy znale¹¢ czas t > 0, dla którego∫ t0 |v (s)| ds > µ. W tym celu poka»emy, »e∫ ∞
0|v (s)| ds = +∞. (2.2.10)
Oznaczmy przez
φ (t) =∫ ∞t
v (s) ds
20

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Poszukamy równania ró»niczkowego, które speªnia φ. Niech p b¦dzie wielomianem charaktery-stycznym macierzy A. Wtedy
p
(− d
dt
)v (t) = p
(− d
dt
) [bT e−AtB
]= bT
(p
(− d
dt
)e−At
)B = bT
(p (A) e−At
)B ≡ 0,
poniewa» p (A) = 0, co wynika z twierdzenia Cayley'a-Hamiltona. St¡d dostajemy
− d
dtp
(− d
dt
)φ (t) = p
(− d
dt
)(− d
dtφ (t)
)= p
(− d
dt
)v (t) = 0.
W konsekwencji φ speªnia równanie ró»niczkowe stopnia n+ 1
d
dtp
(− d
dt
)φ (t) = 0.
Wiemy równie», »e φ 6≡ 0. Niech µ1, . . . , µn+1 b¦d¡ rozwi¡zaniami wielomianu µp (−µ) = 0. Zteorii równa« ró»niczkowych zwyczajnych wynika, »e
φ (t) jest sum¡ wyra»e« postaci pi (t) eµit
dla odpowiednich wielomianów pi.Widzimy równie», »e µn+1 = 0 oraz µk = −λk, k = 1, . . . , n, gdzie λk s¡ warto±ciami wªasnymi
macierzy A. Z zaªo»enia Reµk 0, k = 1, . . . , n. Je±li∫∞
0 |v (s)| ds < +∞, to
|φ (t)| ¬∫ ∞t|v (s)| ds→ 0 przy t→∞,
co oznacza, »e φ (t) → 0 gdy t → ∞. Jest to jednak sprzeczno±¢ z reprezentacj¡ rozwi¡zaniarównania φ (t) =
∑pi (t) eµit, bo Reµi 0. Wi¦c formuªa (2.2.10) jest prawdziwa.
5. W konsekwencji dla dowolnego µ istnieje t > 0 takie, »e
b · x0 =∫ t
0|v (s)| ds > µ,
a to oznacza sprzeczno±¢ z (2.2.8). Wi¦c S =Rn.Okazuje si¦, »e w przypadku klasy sterowa« U∞ =
⋃t1>0
L∞([0, t1],Rm) warunek globalnej ste-
rowalno±ci ukªadu (2.2.1) znacznie si¦ upraszcza.
Twierdzenie 2.2.5. Ukªad (2.2.1) rozwa»any z klas¡ sterowa« U∞jest globalnie sterowalny(tzn. S∞ = Rn, gdzie S∞ jest zbiorem sterowalno±ci odpowiadaj¡cym klasie sterowa« U∞) wtedyi tylko wtedy, gdy rankM = n.
Dowód. Najpierw wyka»emy, »e warunek rankM = n jest wystarczaj¡cy dla globalnej stero-walno±ci. Zaªó»my, »e rankM = n. Z twierdzenia 2.2.2 wynika, »e istnieje staªa δ > 0 taka, »eB(0, δ) ⊂ S. Ustalmy teraz dowolny punkt x0 ∈ Rn. Istnieje oczywi±cie staªa λ > 0 taka, »eλx0 ∈ B(0, δ). A zatem istnieje sterowanie uλ ∈ U takie, »e
x(t1;λx0, uλ) = 0,
Korzystaj¡c z formuªy Cauchy'ego otrzymujemy
λ(eAt1x0 + eAt1∫ t1
0e−AsB
1λuλ(s)ds)) = 0,
21

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
czyli
eAt1x0 + eAt1∫ t1
0e−AsBu0(s)ds = 0,
gdzie u0(t) = 1λuλ(t) dla t ∈ [0, t1]. Oznacza to, »e rozwi¡zanie ukªadu (2.2.1) odpowiadaj¡ce
sterowaniu u0 ∈ U∞, speªniaj¡ce warunek pocz¡tkowy x(0) = x0, dane wzorem
x(t;x0, u0) = eAtx0 + eAt∫ t
0e−AsBu0(s)ds
dla t ∈ [0, t1], przeprowadza ukªad (2.2.1) z punktu x0 do punktu 0 na przedziale [0, t1]. A zatemx0 ∈ S∞, co, wobec dowolno±ci punktu x0 ∈ Rn, ko«czy dowód tej cz¦±ci twierdzenia.
Teraz udowodnimy, »e warunek rankM = n jest konieczny dla globalnej sterowalno±ci. Zaªó»myzatem, »e S∞ = Rn.
Niech x0 ∈ Rn, x0 6= 0. Istnieje wi¦c sterowanie u ∈ U∞ takie, »e
x(t1;x0, u) = 0
dla pewnego t1 > 0, tzn.
eAt1x0 + eAt1∫ t1
0e−AsBu(s)ds = 0.
Niech λ > 0 b¦dzie tak¡ staª¡, »e u0 = λu ∈ U . Wówczas
0 =1λ
(eAt1λx0 + eAt1∫ t1
0e−AsBu0(s)ds),
czyli
0 = eAt1λx0 + eAt1∫ t1
0e−AsBu0(s)ds,
co oznacza, »e λx0 ∈ S.Rozwa»my teraz sko«czony (2n - elementowy) zbiór postaci
A = x = (x1, . . . , xn) ∈ Rn;∣∣∣xk∣∣∣ = 1 dla k = 1, . . . , n.
Elementy tego zbioru oznaczmy przez aj, j = 1, . . . , 2n. Niech λj > 0 b¦dzie tak¡ staª¡, »e λjaj ∈ S,j = 1, . . . 2n. Poªó»my
λ0 = minj=1,...,2n
λj.
Z faktu, »e 0 ∈ S i z wypukªo±ci zbioru S wynika, i»
λ0aj ∈ S
dla j = 1, . . . , 2n. Niech convA b¦dzie powªok¡ wypukª¡ zbioru A. Z wªasno±ci powªoki wypukªejwynika, »e
conv(λ0A) = λ0 convA.
Oznacza to, wobec wypukªo±ci zbioru S oraz inkluzji λ0A ⊂ S, »e
λ0 convA ⊂ S.
Poniewa»convA = x = (x1, . . . , xn) ∈ Rn; max
i=1,...,n
∣∣∣xi∣∣∣ ¬ 1
jest otoczeniem punktu 0 ∈ Rn i λ0 > 0, wi¦c powy»sza inkluzja wraz z twierdzeniem 2.2.2 ko«czydowód twierdzenia.
22

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
2.2.2 Obserwowalno±¢
Rozwa»my jeszcze raz jednorodny ukªad liniowy postaci
x(t) = Ax(t), (2.2.11)
x(0) = x0,
gdzie A jest macierz¡ kwadratow¡ wymiaru n.W tym paragrae zajmiemy si¦ zagadnieniem obserwowalno±ci. Zakªadamy mianowicie, »e
mo»emy obserwowa¢ zachowanie wektora
y (t) := Bx (t) , (t 0) (2.2.12)
dla danej macierzy B ∈ M (m× n), co oznacza, »e y ∈ Rm. Ciekawa ze wzgl¦dów praktycznychjest sytuacja, gdy m << n, wtedy interpretujemy y jako "obserwacje" lub "pomiary" o maªymwymiarze dla wielowymiarowej dynamiki x.
Kluczowym pytaniem jest, czy maj¡c dany wektor y mo»emy zrekonstruowa¢ x? W szczegól-no±ci, czy obserwacja y daje wystarczaj¡co du»o informacji »eby pozna¢ punkt startowy x0?
Definicja 2.2.1. Para równa« (2.2.11)-(2.2.12) jest obserwowalna, je±li znajomo±¢ wektora yna ka»dym przedziale czasowym [0, t] pozwala nam wyznaczy¢ warto±¢ x0. Innymi sªowami, pararówna« (2.2.11)-(2.2.12) jest obserwowalna, je±li dla wszystkich rozwi¡za« x1, x2 z to»samo±ciBx1(·) ≡ Bx2(·) na przedziale [0, t] wynika, »e x1(0) = x2(0).
Przykªad 2.2.2. (i) Je±li B = 0, to oczywi±cie ukªad nie jest obserwowalny.(ii) Je±li m = n oraz B jest nieosobliwa, to oczywi±cie x (t) = B−1y (t) i ukªad jest obserwowalny.
Twierdzenie 2.2.6. Para (2.2.11)-(2.2.12) jest obserwowalna wtedy i tylko wtedy, gdy ukªad
z (t) = AT z (t) +BTu (t) , (2.2.13)
gdzie u ∈ U∞, jest globalnie sterowalny.
Dowód. 1. Zaªó»my, »e (2.2.11)-(2.2.12) nie jest obserwowalny. Wtedy istniej¡ ró»ne punktyx1, x2 ∈ Rn takie, »e
x1(t) = Ax1(t), x1 (0) = x1,
x2(t) = Ax2(t), x1 (0) = x2
oraz y (t) = Bx1 (t) = Bx2 (t) dla t 0. Niech
x (t) = x1 (t)− x2 (t) , x0 = x1 − x2.
Wtedy x(t) = Ax(t), x (0) = x0 6= 0 i Bx (t) = 0, t 0. Wiemy, »e
x (t) = X (t)x0 = eAtx0.
St¡dBeAtx0 = 0, t 0.
Podstawmy t = 0 w powy»szym wzorze, dostaniemy równo±¢ Bx0 = 0. Nast¦pnie zró»niczkujmyten wzór k-krotnie wzgl¦dem t i podstawmy t = 0, otrzymamy
BAkx0 = 0
23

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
dla k = 0, 1, 2, . . .. St¡d xT0(Ak)TBT = 0 i dalej xT0
(AT)kBT = 0. Mamy st¡d
xT0
[BT |ATBT | . . . |
(AT)n−1
BT]
= 0.
W konsekwencji, poniewa» x0 6= 0, rank[BT |ATBT | . . . |
(AT)n−1
BT
]< n. To oznacza, »e za-
danie (2.2.13) nie jest globalnie sterowalne. Innymi sªowy, globalna sterowalno±¢ ukªadu (2.2.13)implikuje obserwowalno±¢ (2.2.11)-(2.2.12).
2. Zaªó»my teraz, »e ukªad (2.2.13) nie jest globalnie sterowalny. Z twierdzenia 2.2.5 wynika,
»e rank[BT |ATBT | . . . |
(AT)n−1
BT
]< n, oznacza to, »e istnieje niezerowy wektor x0 ∈ Rn taki,
»e
xT0
[BT |ATBT | . . . |
(AT)n−1
BT]
= 0.
Wi¦c BAkx0 = 0 dla k = 0, 1, 2, . . . , n− 1. Chcemy pokaza¢, »e y (t) = Bx (t) = 0 dla t 0, gdzie
x(t) = Ax(t),x (0) = x0.
Korzystaj¡c z twierdzenia Cayley'a-Hamiltona, mo»emy napisa¢
An = −βn−1An−1 − βn−2A
n−2 − . . .− β1A− β0I
dla odpowiednich staªych. St¡d w konsekwencji BAnx0 = 0. Podobnie,
An+1 = A(−βn−1A
n−1 − βn−2An−2 − . . .− β1A− β0I
)= −βn−1A
n − . . .− β0I.
Kontynuuj¡c to rozumowanie dostaniemy, »e BAkx0 = 0 dla wszystkich k. Wiemy, »e
x (t) = X (t)x0 =∞∑k=0
tkAk
k!x0,
ostatecznie wi¦c Bx (t) = B∑∞k=0
tkAk
k! x0 = 0.Pokazali±my, »e je±li ukªad (2.2.13) nie jest globalnie sterowalny, to ukªad (2.2.11)-(2.2.12) nie
jest obserwowalny.
2.2.3 Zasada bang-bang
W tym paragrae znów zajmiemy si¦ ukªadem (2.2.1), tzn.
x(t) = Ax(t) +Bu(t).
Poka»emy, »e dla tego ukªadu zbiory sterowalno±ci S (t1) i SBB (t1) s¡ identyczne dla dowolnegoczasu t1 > 0. Prawdziwe jest mianowicie nast¦puj¡ce
Twierdzenie 2.2.7 (Zasada bang-bang). Niech t1 > 0 oraz x0 ∈ S (t1) dla ukªadu (2.2.1).Wtedy istnieje sterowanie u ∈ UBB[0, t1], które doprowadza x0 do zera w czasie t1.
Aby udowodni¢ to twierdzenie potrzebujemy pewnych narz¦dzi z analizy funkcjonalnej, mi¦dzyinnymi twierdzenia Kreina-Milmana.
24

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Pewne fakty z analizy funkcjonalnej Przypomnijmy, »e L∞([0, t1],Rm) oznacza klas¦ funkcjiistotnie ograniczonych, tzn. takich, które nale»¡ do zbioru
u : [0, t1]→ Rm; |u (t)| <∞ dla p.w. t ∈ [0, t1] .
Norma w tej przestrzeni jest dana wzorem
‖u‖L∞ = supesst∈[0,t1]
|x (t)| = inf K; |x (t)| ¬ K dla p.w. t ∈ [0, t1] ,
a przestrze« L∞([0, t1],Rm) z t¡ norm¡ jest przestrzeni¡ Banacha.
Definicja 2.2.2. Niech uk ⊂ L∞([0, t1],Rm) dla k = 1, 2, . . .. Powiemy, »e ci¡g uk d¡»ysªabo-* do u ∈ L∞([0, t1],Rm), co oznaczamy
uk∗ u,
o ile ∫ t1
0uk (s) · v (s) ds→
∫ t1
0u (s) · v (s) ds
przy k →∞, dla wszystkich v ∈ L1([0, t1],Rm), tzn. speªniaj¡cych∫ t1
0 |v (s)| ds <∞.
Twierdzenie 2.2.8 (Alaoglu). Zbiór U jest sªabo-* zwarty. St¡d dla dowolnego ci¡gu uk ∈ U ,k = 1, 2, . . ., istnieje podci¡g ukj oraz u ∈ U takie, »e
ukj∗ u.
Definicja 2.2.3. Punkt z zbioru wypukªego K nazywamy ekstremalnym, o ile nie istniej¡punkty x, x ∈ K i 0 < λ < 1 takie, »e
z = λx+ (1− λ) x.
Twierdzenie 2.2.9 (Krein-Milman). Niech K b¦dzie wypukªym, niepustym podzbioremL∞([0, t1],Rm) zwartym w sªabej-* topologii. Wtedy K ma przynajmniej jeden punkt ekstremalny.
Zastosowanie dla sterowa« typu bang-bang Dowód Zasady Bang-Bang. (5) 1. Poka»e-my, »e klasa sterowa« dopuszczalnych ∆ (t1), które realizuj¡ zadanie w czasie t1 speªnia zaªo»eniatwierdzenia Kreina-Milmana.
Po pierwsze klasa ta jest niepusta (x0 ∈ S (t1)).Poka»emy, »e klasa ta jest wypukªa. W tym celu przypomnijmy, »e u ∈ ∆ (t1) wtedy i tylko
wtedy, gdy
x0 = −∫ t1
0X−1(s)Bu(s)ds.
We¹my te» u ∈ ∆ (t1) i λ ∈ [0, 1]. Wtedy
x0 = −∫ t1
0X−1(s)Bu(s)ds
oraz
x0 = −∫ t1
0X−1(s)B (λu (s) + (1− λ) u(s)) ds.
Co oznacza, »e λu+ (1− λ) u ∈ ∆.(t1)
25

2.2 Sterowalno±¢ ukªadów liniowych 2 TEORIA STEROWALNOCI
Pozostaªo nam pokaza¢, »e ∆ (t1) jest sªabo-* zwarty. Niech uk ∈ ∆ (t1), na podstawie twier-dzenia Alaoglu istniej¡ podci¡g kj →∞ i u ∈ U takie, »e ukj
∗ u. Chcemy pokaza¢, »e u ∈ ∆ (t1).
Przynale»no±¢ ukj ∈ ∆ (t1) implikuje
x0 = −∫ t1
0X−1(s)Bukj(s)ds→ −
∫ t1
0X−1(s)Bu(s)ds
na podstawie denicji sªabej-* zbie»no±ci. St¡d u ∈ ∆ (t1).Teraz mo»emy zastosowa¢ twierdzenie Kreina-Milmana, z czego dostaniemy, »e istnieje punkt
ekstremalny u∗ ∈ ∆ (t1).2. Teraz poka»emy, sterowanie ekstremalne u∗ ∈ ∆ (t1) jest sterowaniem typu bang-bang. W
tym celu wystarczy pokaza¢, »e dla p.w. t ∈ [0, t1] i dla ka»dego i = 1, . . . ,m mamy∣∣∣ui∗ (s)∣∣∣ = 1.
Zaªó»my przeciwnie. Wtedy istniej¡ indeks i ∈ 1, . . . ,m i podzbiór E ⊂ [0, t1] miary dodatniejtakie, »e |ui∗ (s)| < 1 dla s ∈ E. St¡d wynika istnienie ε > 0 i podzbioru F ⊂ E takich, »e
µ (F ) > 0,∣∣∣ui∗ (s)
∣∣∣ ¬ 1− ε dla s ∈ F.
Zdeniujmy
IF (v) :=∫FX−1(s)Bv(s)ds
dlav (·) := (0, . . . , v (·) , . . . , 0)T ,
gdzie v stoi na i-tym miejscu. We¹my funkcj¦ v o warto±ciach rzeczywistych v 6≡ 0 tak¡, »e
IF (v) = 0
i |v (s)| ¬ 1 dla s ∈ [0, t1]. Oznaczmy
w1 := u∗ + εv,w2 := u∗ − εv,
traktuj¡c v poza F jako funkcj¦ zerow¡.Twierdzimy, »e w1, w2 ∈ ∆ (t1). Rzeczywi±cie, zauwa»my, »e
w1 =u∗ (s) dla s /∈ F,u∗ (s) + εv (s) dla s ∈ F.
Na zbiorze F , mamy |ui∗ (s)| ¬ 1− ε. St¡d∣∣∣wi1 (s)∣∣∣ ¬ ∣∣∣ui∗ (s)
∣∣∣+ ε |v (s)| ¬ 1− ε+ ε ¬ 1.
Ponadto,
−∫ t1
0X−1(s)Bw1(s)ds = −
∫ t1
0X−1(s)Bu∗(s)ds− ε
∫ t1
0X−1(s)Bv(s)ds
= x0 − ε∫ t1
0X−1(s)Bv(s)ds︸ ︷︷ ︸IF (v)=0
= x0.
26

2.3 Sterowalno±¢ ukªadów nieliniowych 2 TEORIA STEROWALNOCI
Podobne rozumowanie mo»na przeprowadzi¢ dla w2. Wi¦c w1, w2 ∈ ∆ (t1).Ostatecznie zauwa»my, »e
w1 := u∗ + εv, w1 6= u∗,
w2 := u∗ − εv, w2 6= u∗,
ale12w1 +
12w2 = u∗.
Jest to sprzeczno±¢ z faktem, »e u∗ jest punktem ekstremalnym zbioru ∆ (t1).
2.3 Sterowalno±¢ ukªadów nieliniowych
W tym paragrae zajmiemy si¦ problemem sterowalno±ci nieliniowych ukªadów autonomicznychpostaci (2.1.1), tzn.
x(t) = f(x(t), u(t)).
Wraz z powy»szym ukªadem rozwa»a¢ b¦dziemy ukªad postaci (2.1.2), czyli
x(t) = −f(x(t), u(t)).
O funkcji f = (f1, . . . , fn) : Rn × Rm → Rn, jak poprzednio, b¦dziemy zakªada¢, »e jest klasy C1
oraz f(0, 0) = 0.W dowodzie nast¦pnego twierdzenia skorzystamy z nast¦puj¡cego klasycznego wyniku.
Lemat 2.3.1. Niech X, Y b¦d¡ przestrzeniami Banacha oraz G : X ⊃ B(0, γ) → Y odwzoro-waniem klasy C1 takim, ze G(0) = 0 (γ jest ustalon¡ staª¡ dodatni¡). Je»eli ró»niczka FréchetaG′(0) odwzorowania G w punkcie 0 przeksztaªca przestrze« X na caª¡ przestrze« Y , to istniejestaªa ρ > 0 taka, »e
B(0, ρ) ⊂ G(B(0, γ)),
tzn. dla dowolnego y ∈ B(0, ρ) istnieje x ∈ B(0, γ) takie, »e y = G(x).
Symbolem AC([0, 1],Rn) oznacza¢ b¦dziemy zbiór funkcji absolutnie ci¡gªych x : [0, 1] → Rn
takich, »e x(0) = 0. Zbiór ten z naturalnie okre±lonymi dziaªaniami dodawania i mno»enia przezliczby rzeczywiste oraz norm¡
‖x‖AC =∫ 1
0|x(t)| dt
jest przestrzeni¡ Banacha.Udowodnimy teraz
Twierdzenie 2.3.1. Je±lirankMf = n,
gdzieMf = [Bf | AfBf | A2
fBf | ... | An−1f Bf ],
przy czym
Af =∂f
∂x(0, 0) =
∂f1∂x1
(0, 0) · · · ∂f1∂xn
(0, 0)...
......
∂fn∂x1
(0, 0) · · · ∂fn∂xn
(0, 0)
,
27

2.3 Sterowalno±¢ ukªadów nieliniowych 2 TEORIA STEROWALNOCI
Bf =∂f
∂u(0, 0) =
∂f1∂u1
(0, 0) · · · ∂f1∂um
(0, 0)...
......
∂fn∂u1
(0, 0) · · · ∂fn∂um
(0, 0)
,gdzie u = (u1, . . . , um) ∈ U , x = (x1, . . . , xn), to ukªad (2.1.1) jest lokalnie sterowalny.
Dowód. (*)Poka»emy, »e zbiór osi¡galno±ci K(1; 0) dla ukªadu (2.1.2) zawiera punkt 0 w swoim wn¦trzu.
Tym samym, na mocy lematu 2.1.1 (punkt 3), zbiór sterowalno±ci S(1) dla ukªadu (2.1.1) zawiera0 w swoim wn¦trzu.
Oznaczmy g = −f i okre±lmy nast¦puj¡ce odwzorowanie
F : AC([0, 1],Rn)× L∞([0, 1],Rm)→ L1([0, 1],Rn),
F (x(·), u(·)) = x(·)− g(x(·), u(·)).
Mo»na pokaza¢, »e odwzorowanie F speªnia zaªo»enia twierdzenia o funkcji uwikªanej (5). A zatemistniej¡ staªe γ > 0 i δ > 0 takie, »e dla dowolnego u ∈ L∞([0, 1],Rm), ‖u‖∞ < γ istnieje dokªadniejedna funkcja xu ∈ AC([0, 1],Rn) taka, »e ‖xu‖AC < δ oraz
F (xu(·), u(·)) = 0.
Ponadto, odwzorowanieϕ : u(·) 7→ xu(·)
jest klasy C1 na kuli B(0, γ) (w przestrzeni L∞([0, 1],Rm)), ϕ(0) = 0 oraz
ϕ′(u(·)) = −[Fx(ϕ(u(·)), u(·))]−1 Fu(ϕ(u(·)), u(·)).
Bez zmniejszania ogólno±ci rozwa»a« mo»emy zaªo»y¢, »e γ jest tak¡ staª¡, i»
u ∈ L∞([0, 1],Rm); ‖u(·)‖∞ < γ ⊂ U .
Zdeniujmy nast¦puj¡ce odwzorowanie
λ : AC([0, 1],Rn) 3 x(·) 7→ x(1) ∈ Rn.
Odwzorowanie to, jako liniowe i ci¡gªe, jest klasy C1 i w konsekwencji tak»e odwzorowanie
G = λ ϕ5Twierdzenie (o funkcji uwikªanej). Niech X,Y, Z b¦d¡ przestrzeniami Banacha, U - otoczeniem punktu (x0, y0)
w iloczynie kartezja«skim X × Y i F : U → Z - odwzorowaniem klasy C1. Zaªó»my ponadto, »e F (x0, y0) = 0i ró»niczka cz¡stkowa Fy(x0, y0) : Y → Z odwzorowania F w punkcie (x0, y0) jest liniowym homeomorzmemprzestrzeni Y na przestrze« Z.Wówczas istniej¡ staªe ε > 0 i δ > 0 oraz odwzorowanie ϕ : B(x0, δ)→ B(y0, ε) takie, »e- na zbiorze B(x0, δ)×B(y0, ε) równo±ci F (x, y) = 0 i y = ϕ(x) s¡ równowa»ne,- ϕ jest odwzorowaniem klasy C1 oraz
ϕ′(x) = −[Fy(x, ϕ(x))]−1 Fx(x, ϕ(x))
dla dowolnego x ∈ B(x0, δ).
28

2.3 Sterowalno±¢ ukªadów nieliniowych 2 TEORIA STEROWALNOCI
jest klasy C1 na kuli B(0, γ), przy czym G(0) = 0. Ponadto
G′(0)(u(·)) = λ ϕ′(0)(u(·)) = −λ [Fx(ϕ(0), 0)]−1 Fu(ϕ(0), 0)(u(·))= −λ [Fx(0, 0)]−1 Fu(0, 0)(u(·)) = λ([Fx(0, 0)]−1(Bgu(·)))= λ(x(·)) = x(1),
gdzieBgu(·) = Fx(0, 0)x(·),
czylix′(t) = Agx(t) +Bgu(t),
przy czymx(0) = 0
oraz
Ag =∂g
∂x(0, 0) = −∂f
∂x(0, 0) = −Af ,
Bg =∂g
∂u(0, 0) = −∂f
∂u(0, 0) = −Bf .
Ostatecznie wi¦cG′(0)(u(·)) = x(1), (2.3.1)
gdzie x jest rozwi¡zaniem ukªadu
x′(t) = −Af x(t)−Bf u(t)
speªniaj¡cym warunek pocz¡tkowyx(0) = 0.
Zauwa»my teraz, »e z warunku rankMf = n wynika (w taki sam sposób jak w dowodzietwierdzenia 2.2.2 (a)=⇒(b)), »e 0 ∈ intS(1) dla ukªadu
x(t) = Afx(t) +Bfu(t).
Wobec lematu 2.1.1 oznacza to, »e pewna kula o ±rodku w punkcie 0 i dodatnim promieniu zawartajest w zbiorze osi¡galno±ci (w chwili t = 1 z punktu 0) dla ukªadu
x(t) = −Afx(t)−Bfu(t)
rozwa»anego z klas¡ sterowa« U [0, 1] i w konsekwencji - tak»e z klas¡ L∞([0, 1],Rm). Oznacza to,wobec równo±ci (2.3.1), »e zbiór G′(0)(L∞([0, 1],Rm)) zawiera t¦ kul¦. To z kolei, wobec liniowo±ciodwzorowania G′(0), oznacza, »e G′(0) odwzorowuje przestrze« L∞([0, 1],Rm) na caª¡ przestrze«Rn. Z lematu 2.3.1 wynika wobec powy»szego, »e
0 ∈ intG(B(0, γ)),
co oznacza, »e 0 jest punktem wewn¦trznym zbioru osi¡galno±ci (w chwili t = 1 z punktu 0) dlaukªadu
x(t) = −f(x(t), u(t)).
Zatem, na mocy lematu 2.1.1,0 ∈ intS(1) ⊂ intS
29

2.3 Sterowalno±¢ ukªadów nieliniowych 2 TEORIA STEROWALNOCI
dla ukªadux(t) = f(x(t), u(t)),
co ko«czy dowód twierdzenia.Udowodnimy teraz pewne twierdzenie o globalnej sterowalno±ci ukªadu (2.1.1).
Twierdzenie 2.3.2. Zaªó»my, »e ka»de rozwi¡zanie x równania
x(t) = f(x(t), 0)
mo»na przedªu»y¢ do rozwi¡zania okre±lonego na przedziale [0,∞), przy czym
limt→∞|x(t)| = 0. (2.3.2)
Wówczas, je±li rankMf = n, to ukªad (2.1.1) jest globalnie sterowalny.
Dowód. Ustalmy dowolny punkt x0 ∈ Rn. Z faktu, »e rankMf = n wynika (na mocy twierdzenia2.3.1), ze istnieje staªa δ > 0 taka, »e B(0, δ) ⊂ S. Niech x b¦dzie rozwi¡zaniem ukªadu (2.1.1)speªniaj¡cym warunek pocz¡tkowy x(0) = x0, odpowiadaj¡cym sterowaniu u ≡ 0. Z warunku(2.3.2) wynika, »e istnieje t > 0 takie, »e
x(t) ∈ B(0, δ).
Niech teraz u b¦dzie sterowaniem przeprowadzaj¡cym ukªad (2.1.1) z punktu x(t) do punktu 0 naprzedziale [0, t]. Z lematu 2.1.1 wynika, »e sterowanie
[t, t+ t] 3 t 7→ u(t− t) ∈ Ω
przeprowadza ukªad (2.1.1) z punktu x(t) do punktu 0 na przedziale [t, t+ t]. Zatem sterowanie
u∗ : [0, t+ t] 3 t 7→
0 je±li t ∈ [0, t]u(t− t) je±li t ∈ (t, t+ t]
nale»¡ce do klasy U , przeprowadza ukªad (2.1.1) z punktu x0 do punktu 0 na przedziale [0, t+ t].Dowód twierdzenia jest zako«czony.
30

3 STEROWANIE CZASOOPTYMALNE
3 Sterowanie czasooptymalne
3.1 Wprowadzenie
Rozwa»my liniowy ukªad autonomiczny
x(t) = Ax(t) +Bu(t) (3.1.1)
z warunkiem pocz¡tkowymx(0) = x0 6= 0
i z funkcjonaªem kosztu
J(u) =∫ tu
01dt = tu → min, (3.1.2)
który jest okre±lony na zbiorze sterowa« dopuszczalnych
∆ = u ∈ U ; istnieje tu > 0 takie, »e u ∈ U [0, tu]oraz x(tu;x0, u) = 0.
Powy»sze zadanie nazywa¢ b¦dziemy zadaniem sterowania czasooptymalnego.W przypadku, gdy x0 = 0 przyjmowa¢ b¦dziemy, »e ka»de sterowanie u ∈ U jest czasoopty-
malne z czasem optymalnym tu = 0.B¦dziemy tak»e zakªada¢ w tej cz¦±ci, »e macierz B nie zawiera kolumny zerowej.Sterowanie u∗ ∈ ∆ nazywa¢ b¦dziemy czasooptymalnym, je±li
J(u∗) ¬ J(u)
dla dowolnego sterowania u ∈ ∆.W dalszym ci¡gu korzysta¢ b¦dziemy z poj¦cia odlegªo±ci zbiorów.Niech X b¦dzie rodzin¡ wszystkich niepustych zwartych podzbiorów przestrzeni Rn oraz x ∈
Rn, A,B ∈ X. Okre±lmyd(x,A) = inf
y∈A|x− y| ,
N(A, ε) = x ∈ Rn; d(x,A) < ε,
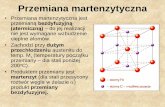
h : X ×X 3 (A,B) 7→ infε > 0; A ⊂ N(B, ε), B ⊂ N(A, ε).
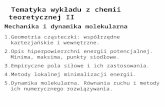
Funkcj¦ h nazywa¢ b¦dziemy metryk¡ Hausdora na X (h speªnia aksjomaty odlegªo±ci). Ponadto,je±li A,B ∈ X oraz A ⊂ B, to h (A,B) = supx∈B d (x,A) = supx∈B infy∈A |x− y|.
31

3.1 Wprowadzenie 3 STEROWANIE CZASOOPTYMALNE
Wida¢, »e A 6⊂ N(B,E) i B 6⊂ N(A,E), natomiast A ⊂ N(B,R) i B ⊂ N(A,R).
Lemat 3.1.1 (Wªasno±ci zbioru osi¡galno±ci). Zbiór K(t;x0) jest wypukªy i domkni¦ty. Po-nadto, odwzorowanie
[0,∞) 3 t 7→ K(t;x0) ∈ X
jest ci¡gªe w dowolnym punkcie x0 ∈ Rn.
Dowód. (5) Wypukªo±¢. Niech x1, x2 ∈ K(t;x0). Wtedy istniej¡ sterowania u1, u2 ∈ U takie, »e
x1 = X (t)x0 +X (t)∫ t
0X−1 (s)Bu1 (s) ds,
x2 = X (t)x0 +X (t)∫ t
0X−1 (s)Bu2 (s) ds.
Niech 0 ¬ λ ¬ 1, wtedy
λx1 + (1− λ)x2 = X (t)x0 +X (t)∫ t
0X−1 (s)B
λu1 (s) + (1− λ)u2 (s)︸ ︷︷ ︸∈U
ds.St¡d λx1 + (1− λ)x2 ∈ K(t;x0).
Domkni¦to±¢. Zaªó»my, »e xk ∈ K(t;x0) dla k = 1, 2, . . . oraz xk → y. Poka»emy, »e y ∈K(t;x0). Poniewa» xk ∈ K(t;x0), wi¦c istnieje sterowanie uk ∈ U takie, »e
xk = X (t)x0 +X (t)∫ t
0X−1 (s)Buk (s) ds.
Z twierdzenia Alaoglu wynika, »e istnieje podci¡g kj → ∞ i u ∈ U takie, »e ukj∗ u. Poªó»my
k = kj w powy»szym wzorze, st¡d otrzymamy
y = X (t)x0 +X (t)∫ t
0X−1 (s)Bu (s) ds.
Wi¦c rzeczywi±cie y ∈ K(t;x0) i zbiór K(t;x0) jest domkni¦ty.
32

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Ci¡gªo±¢. Niech x0 ∈ Rn. Ustalmy t0 0 oraz ε > 0. Poka»emy, »e istnieje staªa δ > 0 taka, »e
|t− t0| < δ =⇒ (K(t;x0) ⊂ N(K(t0;x0), ε) ∧ K(t0;x0) ⊂ N(K(t;x0), ε)) ,
co oznacza, »e h(K(t;x0),K(t0;x0)) < ε. Niech T = t0 + 1, M = maxs∈[0,T ]
∣∣∣e−AsB∣∣∣(6),ε =
12
ε
|x0|+ TM√m+ |eAt0|
oraz δ b¦dzie tak¡ staª¡, »e ∣∣∣eAt − eAt0∣∣∣ < ε,
gdy |t− t0| < δ. Poªó»my
δ = min1, ε
M√m, δ.
Niech y ∈ K(t;x0), tzn.
y = eAtx0 + eAt∫ t
0e−AsBu(s)ds
dla pewnego u ∈ U [0, t]. Przedªu»my funkcj¦ u na przedziaª [0, T ], przyjmuj¡c u(s) = 0 dlas ∈ (t, T ]. Wówczas
y0 = eAt0x0 + eAt0∫ t0
0e−AsBu(s)ds ∈ K(t0;x0)
oraz
|y − y0| =∣∣∣∣eAtx0 + eAt
∫ t
0e−AsBu(s)ds− eAt0x0 − eAt0
∫ t0
0e−AsBu(s)ds
∣∣∣∣¬∣∣∣eAt − eAt0∣∣∣ |x0|+
∣∣∣eAt − eAt0∣∣∣ ∣∣∣∣∫ t
0e−AsBu(s)ds
∣∣∣∣+∣∣∣eAt0∣∣∣ ∣∣∣∣∣
∫ maxt0,t
mint0,te−AsBu(s)ds
∣∣∣∣∣¬ ε |x0|+ ε
∫ T
0M√mds+
∣∣∣eAt0∣∣∣ ε
M√mM√m
= ε(|x0|+ TM√m+
∣∣∣eAt0∣∣∣) =ε
2< ε,
poniewa» |u (s)| <√m. Oznacza to, »e y ∈ N(K(t0;x0), ε), a wobec dowolno±ci y ∈ K(t;x0), »e
K(t;x0) ⊂ N(K(t0;x0), ε).W analogiczny sposób mo»na pokaza¢, »e K(t0;x0) ⊂ N(K(t;x0), ε).Dowód twierdzenia jest zako«czony.
3.2 Czasooptymalna zasada maksimum Pontriagina
W tym paragrae zajmiemy si¦ podstawowymi zagadnieniami teorii sterowania optymalnego dlaliniowego zadania z czasowym kryterium jako±ci, a mianowicie istnieniem sterowa« optymalnych iwarunkami koniecznymi optymalno±ci, które stanowi¢ b¦d¡ narz¦dzie do konstrukcji tych sterowa«.Zaczniemy od dowodu twierdzenia egzystencjalnego.
6Staªa M jest dodatnia, poniewa»∣∣e−A·0B∣∣ = |IB| = |B| > 0.
33

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Twierdzenie 3.2.1 (Istnienie sterowania czasooptymalnego). Je±li istnieje sterowanieprzeprowadzaj¡ce ukªad (3.1.1) z punktu x0 (x0 6= 0) do punktu 0, to istnieje sterowanie czasoop-tymalne dla zadania (3.1.1)-(3.1.2) przeprowadzaj¡ce ukªad z punktu x0 do punktu 0.
Dowód. Z zaªo»enia wynika, »e 0 ∈ K(t∗;x0) dla pewnego t∗ > 0. Okre±lmy
t1 = inft > 0; 0 ∈ K(t;x0).
Poka»emy, »e 0 ∈ K(t1;x0).Istotnie, przypu±¢my bowiem, »e 0 /∈ K(t1;x0). Wobec domkni¦to±ci zbioru K(t1;x0), istnieje
kula B(0, ρ), ρ > 0, taka, »eB(0, ρ) ∩ K(t1;x0) = ∅.
Z ci¡gªo±ci odwzorowania t 7→ K(t;x0) wynika istnienie staªej δ > 0 takiej, »e
B(0,ρ
3) ∩ K(t;x0) = ∅.
dla t 0 takich, »e |t− t1| < δ. W szczególno±ci powy»szy warunek zachodzi dla t ∈ [t1, t1 + δ),czyli 0 /∈ K(t;x0) dla t ∈ [t1, t1 + δ), co jest sprzeczne z okre±leniem t1.
Z zasady bang-bang (twierdzenia 2.2.7) wynika nast¦puj¡cy
Wniosek 3.2.1. Je±li istnieje sterowanie przeprowadzaj¡ce ukªad (3.1.1) z punktu x0 (x0 6= 0)do punktu 0, to istnieje sterowanie czasooptymalne typu bang-bang.
Bardzo wa»n¡ rol¦ w teorii sterowania optymalnego odgrywaj¡ tzw. sterowania ekstremalne.Sterowanie u ∈ U [0, t1] nazywane jest sterowaniem ekstremalnym, je±li
x(t;x0, u) ∈ ∂K(t;x0)
dla t ∈ [0, t1] (∂K(t;x0) jest brzegiem zbioru osi¡galno±ci K(t;x0)).
Uwaga 3.2.1. Sterowanie ekstremalne mo»e nie by¢ dopuszczalnym, a sterowanie ekstremalnei jednocze±nie dopuszczalne mo»e nie by¢ sterowaniem czasooptymalnym(7).
W dowodzie nast¦pnego twierdzenia wykorzystamy nast¦puj¡cy wa»ny lemat.
Lemat 3.2.1. Niech u ∈ U [0, t1] b¦dzie dowolnym sterowaniem. Je±li
x(t∗;x0, u) ∈ intK(t∗;x0)
dla pewnego t∗ ∈ (0, t1), tox(t;x0, u) ∈ intK(t;x0)
dla t ∈ (t∗, t1]. Innymi sªowy, odpowied¹ ukªadu nie mo»e wyj±¢ z wn¦trza sto»ka osi¡galno±ciRC(x0) na jego brzeg.
Dowód. (5) Ustalmy sterowanie u ∈ U [0, t1]. Je±li
x∗ = x(t∗;x0, u) ∈ intK(t∗;x0),
to istnieje staªa δ > 0 taka, »e B(x∗, δ) ⊂ K(t∗;x0). A wi¦c dla dowolnego punktu x0 ∈ B(x∗, δ)istnieje sterowanie u takie, »e
x(t∗;x0, u) = x0.
7Z wyników przedstawionych w dalszej cz¦±ci opracowania wynika¢ b¦dzie, »e je±li ukªad sterowania jest nor-malny, to sterowanie ekstremalne, które jest dopuszczalne, jest sterowaniem czasooptymalnym.
34

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Rozwa»my teraz nast¦puj¡cy problem pocz¡tkowy
y(t) = Ay(t) +Bu(t), t ∈ [t∗, t1],
y(t∗) = x0,
gdzie u jest ustalonym wy»ej sterowaniem. Rozwi¡zanie y powy»szego zadania dane jest wzorem
y(t) = R(t)x0 + c(t), t ∈ [t∗, t1],
gdzie R(t) = eA(t−t∗), c(t) =∫ t
t∗eA(t−s)Bu(s)ds. Ponadto, rozwi¡zaniem speªniaj¡cym warunek
pocz¡tkowyy(t∗) = x∗
jest funkcja[t∗, t1] 3 t 7→ x(t;x0, u) ∈ Rn.
Ustalmy teraz dowolny punkt t ∈ (t∗, t1] i rozwa»my odwzorowanie
Rn 3 x 7→ R(t)x ∈ Rn.
Jest to odwzorowanie liniowe ci¡gªe i przeksztaªca przestrze« Rn na przestrze« Rn(8). A zatem, ztwierdzenia o odwzorowaniu otwartym wynika, »e przeksztaªca ono zbiory otwarte w Rn na zbioryotwarte w Rn. St¡d, zbiór
R = y ∈ Rn; y = R(t)x0 + c(t), x0 ∈ B(x∗, δ)
jest otwarty w Rn. Ponadto R ⊂ K(t;x0), poniewa» B(x∗, δ) ⊂ K(t∗;x0). Ostatecznie wi¦c, zotwarto±ci R wynika, »e
R ⊂ intK(t;x0).
St¡d w szczególno±ci wynika (wobec dowolno±ci t ∈ (t∗, t1]), »e
x(t;x0, u) ∈ intK(t;x0)
dla t ∈ (t∗, t1].Dowód lematu jest zako«czony.Teraz udowodnimy nast¦puj¡ce twierdzenie.
Twierdzenie 3.2.2. Je±li w ∈ U [0, t1] jest sterowaniem czasooptymalnym (z czasem optymal-nym t1) dla zadania (3.1.1)-(3.1.2), przeprowadzaj¡cym ukªad z punktu x0 do punktu 0, to jestono sterowaniem ekstremalnym.
Dowód. Niech w b¦dzie sterowaniem speªniaj¡cym zaªo»enia twierdzenia. Przypu±¢my, »e 0 /∈∂K(t1;x0). Istnieje wi¦c ρ > 0 takie, »e B(0, ρ) ⊂ K(t1;x0). W elementarny sposób mo»na pokaza¢(jak w twierdzeniu 3.2.1), »e istnieje staªa δ > 0 taka, »e 0 ∈ K(t1 − δ;x0), co jest sprzeczne zoptymalno±ci¡ t1. A wi¦c
x(t1;x0, w) = 0 ∈ ∂K(t1;x0).
Z lematu 3.2.1 wynika zatem, »e w jest sterowaniem ekstremalnym.Zajmiemy si¦ teraz zagadnieniem warunków koniecznych optymalno±ci.B¦dziemy mówili, »e ukªad (3.1.1) jest normalny, je±li dla dowolnego j = 1, ...,m, h ∈ Rnr0
oraz przedziaªu [0, t1] (t1 > 0) istnieje t ∈ [0, t1] takie, »e
(hT e−AtB)j 6= 0.8Ta wªasno±¢ wynika z faktu, »e detR(t) 6= 0.
35

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Uwaga 3.2.2. Z analityczno±ci funkcji [0, t1] 3 t 7→ (hT e−AtB)j ∈ R wynika, »e jest ona to»sa-mo±ciowo równa zero lub posiada co najwy»ej sko«czon¡ ilo±¢ miejsc zerowych.
Poni»sze twierdzenie nazywa¢ b¦dziemy zasad¡ maksimum dla sterowania ekstremalnego.
Twierdzenie 3.2.3. Je±li ue ∈ U [0, te] jest sterowaniem ekstremalnym, to istnieje wektor h ∈Rn r 0 taki, »e
hT e−AtBue(t) = maxv∈Ω
hT e−AtBv
(3.2.1)
dla p.w. t ∈ [0, te].Na odwrót, je±li istnieje wektor h ∈ Rn r 0 taki, »e zachodzi (3.2.1), to ue ∈ U [0, te] jest
sterowaniem ekstremalnym.
Uwaga 3.2.3. Je±li ukªad jest normalny, to równo±¢ (3.2.1) jest równowa»na nast¦puj¡cej
uje(t) = sign(hT e−AtB)j, j = 1, . . . ,m,
dla p.w. t ∈ [0, te].
Dowód. (5) Najpierw udowodnimy pierwsz¡ cz¦±¢ twierdzenia. Niech zatem ue b¦dzie sterowaniemekstremalnym na przedziale [0, te]. A wi¦c
xe(t) = x(t;x0, ue) ∈ ∂K(t;x0)
dla t ∈ [0, te]. Z faktu, »e K(te;x0) jest zbiorem wypukªym i xe(te) ∈ ∂K(te;x0) wynika, »e istniejehiperpªaszczyzna podpieraj¡ca zbiór K(te;x0) w punkcie xe(te). Innymi sªowy, istnieje wektorg ∈ Rn r 0 taki, »e
g · x ¬ g · xe(te) (3.2.2)
dla wszystkich x ∈ K(te;x0). Z uwagi na fakt, »e x ∈ K(te;x0) wtedy i tylko wtedy, gdy istniejesterowanie u ∈ U [0, te] takie, »e
x = eAtex0 +∫ te
0eA(te−s)Bu(s)ds,
ªatwo wida¢, »e nierówno±¢ (3.2.2) jest równowa»na równo±ci
g ·∫ te
0eA(te−s)Bu(s)ds ¬ g ·
∫ te
0eA(te−s)Bue(s)ds, u ∈ U [0, te].
Oznaczaj¡c hT = gT eAte , mo»emy powy»sz¡ nierówno±¢ zapisa¢ w postaci∫ te
0hT e−AsBu(s)ds ¬
∫ te
0hT e−AsBue(s)ds, u ∈ U [0, te]
(oczywi±cie h 6= 0, poniewa» det eAte 6= 0 i g 6= 0). St¡d∫ te
0hT e−AsB (ue(s)− u(s)) ds 0 (3.2.3)
dla wszystkich sterowa« u ∈ U [0, te]. Twierdzimy, »e powy»sze implikuje równo±¢
hT e−AsBue(s) = maxv∈Ω
hT e−AsBv
(3.2.4)
36

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
dla p.w. s ∈ [0, te]. Je±li zaªo»ymy przeciwnie, to istnieje podzbiór E ⊂ [0, te] miary dodatniej taki,»e
hT e−AsBue(s) < maxv∈Ω
hT e−AsBv
dla s ∈ E. Niech u b¦dzie sterowaniem danym formuª¡
u (t) =ue (t) , t /∈ E,u (t) , t ∈ E,
gdzie u jest wybrane tak, »e
maxv∈Ω
hT e−AsBv
= hT e−AsBu(s).
Wtedy ∫EhT e−AsB (ue(s)− u(s))︸ ︷︷ ︸
<0
ds 0.
Jest to sprzeczno±¢ z (3.2.3). A wi¦c wzór (3.2.4) jest prawdziwy.Przejd¹my teraz do dowodu drugiej cz¦±ci twierdzenia.Zaªó»my, »e istnieje wektor h ∈ Rn r 0 taki, »e zachodzi
hT e−AtBue(t) = maxv∈Ω
hT e−AtBv
dla p.w. t ∈ [0, te]. Ustalmy dowolny punkt t ∈ [0, te]. Z powy»szej równo±ci otrzymujemy∫ t
0hT e−AsBu(s)ds ¬
∫ t
0hT e−AsBue(s)ds, u ∈ U [0, t].
Z faktu, ze macierz eAt jest nieosobliwa, wynika, »e istnieje wektor g ∈ Rn r 0 taki, »e
hT = gT eAt.
A wi¦c ∫ t
0gT eA(t−s)Bu(s)ds ¬
∫ t
0gT eA(t−s)Bue(s)ds, u ∈ U [0, t].
St¡d
gT (eAtx0 +∫ t
0eA(t−s)Bu(s)ds) ¬ gT (eAtx0 +
∫ t
0eA(t−s)Bu(s)ds), u ∈ U [0, t],
czylig · x(t) ¬ g · xe(t); x(t) ∈ K(t;x0).
Oznacza to, »exe(t) ∈ ∂K(t;x0),
poniewa» g 6= 0 i xe(t) ∈ K(t;x0). Z dowolno±ci t ∈ [0, te] wynika teza.Dowód twierdzenia jest zako«czony.Z powy»szego twierdzenia i z twierdzenia 3.2.2 wynika nast¦puj¡ca czasooptymalna zasada
maksimum.
Twierdzenie 3.2.4. Je±li u∗ ∈ U [0, t∗] jest sterowaniem czasooptymalnym, to istnieje wektorh ∈ Rn r 0 taki, »e
hT e−AtBu∗(t) = maxv∈Ω
hT e−AtBv
dla p.w. t ∈ [0, t∗].
37

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Uwaga 3.2.4. Je±li ukªad (3.1.1) jest normalny, to prawdziwa jest uwaga 3.2.3.
Odpowiednik drugiej cz¦±ci twierdzenia 3.2.3 udowodniony b¦dzie w dalszej cz¦±ci wykªadu.
Twierdzenie 3.2.5. Je±li ukªad (3.1.1) jest normalny oraz istnieje sterowanie przeprowadzaj¡ceten ukªad z punktu x0 do punktu 0, to istnieje dokªadnie jedno sterowanie czasooptymalne dlazagadnienia (3.1.1)-(3.1.2) i jest ono kawaªkami staªe oraz typu bang-bang.
Dowód. Istnienie sterowania czasooptymalnego wynika z twierdzenia 3.2.1. Fakt, »e jest onokawaªkami staªe i typu bang-bang wynika z normalno±ci ukªadu oraz czasooptymalnej zasadymaksimum (twierdzenia 3.2.4).
Przypu±¢my teraz, »e u1, u2 ∈ U [0, t∗] s¡ dwoma ró»nymi sterowaniami czasooptymalnymi. Zczasooptymalnej zasady maksimum wynika, »e s¡ one typu bang-bang. Z liniowo±ci ukªadu wynika,»e sterowanie
w =12u1 +
12u2
speªnia warunek
x0 =12x0 +
12x0 = −
∫ t∗
0X−1(s)B
(12u1(s) +
12u2 (s)
)ds,
co oznacza, »e jest równie» czasooptymalne. Z faktu, »e u1 i u2 ró»ni¡ si¦ na zbiorze miary dodatniejwynika, »e w nie jest typu bang-bang, co jest sprzeczne z tez¡ czasooptymalnej zasady maksimumi uwag¡ 3.2.3.
Dowód twierdzenia jest zako«czony.Podamy teraz dwa twierdzenia charakteryzuj¡ce normalno±¢ ukªadu (3.1.1). W pierwszym z
nich podane jest kryterium natury geometrycznej, w drugim natury analitycznej.
Twierdzenie 3.2.6. Je±li ukªad (3.1.1) jest normalny, to K(t;x0) jest zbiorem ±ci±le wypu-kªym(9) dla dowolnych t > 0 oraz x0 ∈ Rn. Na odwrót, je±li dla pewnych t > 0 oraz x0 ∈ Rn zbiórK(t;x0) jest zbiorem ±ci±le wypukªym, to ukªad (3.1.1) jest normalny.
Dowód tego twierdzenia pomijamy.
Twierdzenie 3.2.7. Ukªad (3.1.1) jest normalny wtedy i tylko wtedy, gdy dla dowolnego j =1, . . . ,m wiersze macierzy [bj | Abj | A2bj | ... | An−1bj] s¡ liniowo niezale»nymi wektorami w Rn
(bj oznacza j-t¡ kolumn¦ macierzy B).
Dowód. Zaªó»my, »e ukªad (3.1.1) jest normalny i przypu±¢my, »e dla pewnego j ∈ 1, ...,mwiersze macierzy [bj | Abj | A2bj | ... | An−1bj] s¡ liniowo zale»ne. Istnieje wi¦c wektor d ∈ Rnr0taki, »e
dT bj = dTAbj = ... = dTAn−1bj = 0.
Z twierdzenia Caley'a-Hamiltona wynika, »e macierz A speªnia swoje równanie charakterystyczneoraz
An = α0 + α1A+ . . .+ αn−1An−1,
gdzie α0, . . . , αn s¡ pewnymi staªymi rzeczywistymi. W konsekwencji
Anbj = α0bj + α1Abj + . . .+ αn−1An−1bj. (3.2.5)
9Niech K ⊂ Rn b¦dzie zbiorem wypukªym i domkni¦tym. Zbiór K nazywamy zbiorem ±ci±le wypukªym, gdyzawiera w swoim wn¦trzu wn¦trze dowolnego odcinka o ko«cach nale»¡cych do K. Innymi sªowy, zbiór K jest ±ci±lewypukªy, gdy jego brzeg ∂K skªada si¦ jedynie z punktów ekstremalnych zbioru K (przypomnijmy, »e punkt p ∈ Knazywamy punktem ekstremalnym zbioru K, je±li nie jest on punktem wewn¦trznym odcinka o ko«cach nale»¡cychdo zbioru K).
38

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
ZatemdTAnbj = 0.
Mno»¡c (3.2.5) kolejno przez A, A2, . . . stwierdzamy w podobny sposób, »e
dTAkbj = 0
dla dowolnego k = 0, 1, . . .. Na tej podstawie
dT e−Atbj = 0
dla t ∈ [0, t∗], gdzie t∗ > 0 jest dowolnym chwilowo ustalonym czasem. A wi¦c(dT e−AtB
)j= 0
dla t ∈ [0, t∗], co jest sprzeczne z normalno±ci¡ ukªadu.Zaªó»my teraz, »e dla dowolnego j = 1, . . . ,m wiersze macierzy [bj | Abj | A2bj | ... | An−1bj] s¡
liniowo niezale»ne i przypu±¢my, »e ukªad nie jest normalny, tzn. istniej¡ j ∈ 1, . . . ,m, wektord ∈ Rn r 0 i przedziaª [0, t∗] takie, »e (
dT e−AtB)j
= 0
dla t ∈ [0, t∗], czylidT e−Atbj = 0 (3.2.6)
dla t ∈ [0, t∗]. Podstawiaj¡c w powy»szej równo±ci t = 0 otrzymujemy
dT bj = 0.
Ró»niczkuj¡c (odpowiedni¡ ilo±¢ razy) obie strony równo±ci (3.2.6) wzgl¦dem t i podstawiaj¡ct = 0 otrzymujemy
dTAkbj = 0
dla k = 0, 1, . . . , n − 1. Oznacza to, »e wiersze macierzy [bj | Abj | A2bj | . . . | An−1bj] s¡ liniowozale»ne, co jest sprzeczne z naszym zaªo»eniem.
Dowód twierdzenia jest zako«czony.
Uwaga 3.2.5. atwo wida¢, »e je±li dla dowolnego (a nawet dla pewnego) j ∈ 1, . . . ,m wierszemacierzy [bj | Abj | A2bj | . . . | An−1bj] s¡ liniowo niezale»ne, to rankM = n (M jest macierz¡sterowalno±ci dla ukªadu (3.1.1).
Udowodnimy teraz twierdzenie b¦d¡ce odwróceniem czasooptymalnej zasady maksimum.
Twierdzenie 3.2.8. Zaªó»my, »e ukªad (3.1.1) jest normalny. Wówczas, je±li sterowanie u∗ ∈U [0, t∗] jest dopuszczalne oraz istnieje wektor h ∈ Rn r 0 taki, »e
hT e−AtBu∗(t) = maxv∈Ω
hT e−AtBv
(3.2.7)
dla p.w. t ∈ [0.t∗], to u∗ jest sterowaniem czasooptymalnym.
39

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
Dowód. Przypu±¢my, »e istnieje sterowanie u0, które przeprowadza ukªad z punktu x0 do punktu0 na przedziale [0, t0] i t0 < t∗. Oznaczmy
x∗(t) = x(t;x0, u∗),
x0(t) = x(t;x0, u0).
Oczywi±cie x∗(t∗) = 0, x0(t0) = 0. Ponadto, z formuªy Cauchy'ego wynika, »e
0 = hT e−At0x0(t0) = hTx0 +∫ t0
0hT e−AsBu0(s)ds.
St¡d
hTx0 = −∫ t0
0hT e−AsBu0(s)ds.
Zatem
hT e−At0x∗(t0) = hTx0 +∫ t0
0hT e−AsBu∗(s)ds (3.2.8)
=∫ t0
0(hT e−AsBu∗(s)− hT e−AsBu0(s))ds 0
(ostatnia nierówno±¢ jest konsekwencj¡ warunku (3.2.7)).Zauwa»my teraz, »e
d
dt(hT e−Atx∗(t)) =
d
dt(hTx0 +
∫ t
0hT e−AsBu∗(s)ds) = hT e−AtBu∗(t)
dla p.w. t ∈ [0, t∗]. Wobec powy»szego, warunku (3.2.8) i faktu, »e x∗(t∗) = 0, mamy
0 −hT e−At0x∗(t0) = −hT e−At0x∗(t0) + hT e−At∗x∗(t∗)
=∫ t∗
t0
d
dt
(hT e−Atx∗(t)
)dt =
∫ t∗
t0hT e−AtBu∗(t)dt.
Z drugiej strony, z równo±ci (3.2.7) wynika, »e
hT e−AtBu∗(t) = maxv∈Ω
hT e−AtBv
hT e−AtB · 0 = 0
dla p.w. t ∈ [0, t∗], co oznacza, »e ∫ t∗
t0hT e−AtBu∗(t)dt 0.
Zatem ∫ t∗
t0hT e−AtBu∗(t)dt = 0.
Poniewa» powy»sza funkcja podcaªkowa jest nieujemna, wi¦c powy»sza równo±¢ oznacza, »e
hT e−AtBu∗(t) = 0
dla p.w. t ∈ [t0, t∗]. To z kolei, wobec równo±ci (3.2.7), implikuje nierówno±¢
hT e−AtBv ¬ 0 (3.2.9)
40

3.2 Czasooptymalna zasada maksimum Pontriagina 3 STEROWANIE CZASOOPTYMALNE
dla dowolnego v ∈ Ω i p.w. t ∈ [t0, t∗]. Z ci¡gªo±ci funkcji t 7→ hT e−AtBv wynika, »e powy»szanierówno±¢ zachodzi dla v ∈ Ω i wszystkich t ∈ [t0, t∗].
Przypu±¢my, »e dla pewnych v ∈ Ω i t ∈ [t0, t∗]
hT e−AtBv < 0.
WówczashT e−AtB(−v) > 0,
co jest sprzeczne z (3.2.9), gdy» −v ∈ Ω. A wi¦c
hT e−AtBv = 0
dla dowolnego v ∈ Ω i wszystkich t ∈ [t0, t∗]. Oznacza to, »e przy ustalonym v ∈ Ω funkcjaanalityczna
φ : [0, t∗] 3 t 7→ hT e−AtBv ∈ R
jest to»samo±ciowo równa zero na przedziale [t0, t∗]. St¡d w szczególno±ci wynika, »e
φ(0) = φ′(0) = . . . = φn−1(0) = 0,
czylihTBv = hTABv = hTA2Bv = . . . = hTAn−1Bv = 0
dla dowolnego v ∈ Ω. St¡d z kolei wynika, »e
hTB = hTAB = hTA2B = . . . = hTAn−1B = 0,
co oznacza, »e wektor h jest prostopadªy do dowolnej kolumny macierzy sterowalno±ci M . Innymisªowy, rankM < n, co jest sprzeczne z normalno±ci¡ ukªadu, która na mocy twierdzenia 3.2.7 iuwagi 3.2.5 implikuje równo±¢ rankM = n.
41

4 ZASADA MNONIKÓW LAGRANGE'A
4 Zasada mno»ników Lagrange'a
4.1 Kilka niezb¦dnych faktów
Niech X, Y b¦d¡ przestrzeniami Banacha oraz U ⊂ X zbiorem otwartym.Mówimy, »e operator F : U → Y jest ró»niczkowalny w punkcie x0 ∈ U w sensie Gâteaux, je±li
istnieje ci¡gªe odwzorowanie liniowe F ′G(x0) : X → Y takie, »e
limt→0
F (x0 + th)− F (x0)t
= F ′G(x0)h
dla dowolnego h ∈ X. Odwzorowanie F ′G(x0) nazywamy ró»niczk¡ Gâteaux operatora F w punkciex0. Je±li F jest ró»niczkowalny w sensie Gâteaux w ka»dym punkcie zbioru U , to mówimy, »e jestró»niczkowalny w sensie Gâteaux na U .
Mówimy, »e operator F : U → Y jest ró»niczkowalny w punkcie x0 ∈ U w sensie Frécheta, je±liistnieje ci¡gªe odwzorowanie liniowe F ′(x0) : X → Y takie, »e
lim‖h‖X→0
‖F (x0 + h)− F (x0)− F ′(x0)h‖Y‖h‖X
= 0.
Odwzorowanie F ′(x0) nazywamy ró»niczk¡ Frécheta operatora F w punkcie x0. Je±li F jest ró»-niczkowalny w sensie Frécheta w ka»dym punkcie zbioru U , to mówimy, »e jest ró»niczkowalny wsensie Frécheta na U .
Mówimy, »e operator F : U → Y jest silnie ró»niczkowalny w punkcie x0 ∈ U , je±li istniejeci¡gªe odwzorowanie liniowe F ′s(x0) : X → Y takie, »e dla dowolnego ε > 0 istnieje δ > 0 taka, »e
‖F (x1)− F (x2)− F ′s(x0)(x1 − x2)‖Y ¬ ε ‖x1 − x2‖X
dla dowolnych x1, x2 ∈ U , ‖x1 − x0‖ < δ, ‖x2 − x0‖ < δ. Odwzorowanie F ′s(x0) nazywamy siln¡ró»niczk¡ operatora F w punkcie x0. Je±li F jest silnie ró»niczkowalny w ka»dym punkcie zbioruU , to mówimy, »e jest silnie ró»niczkowalny na U .
Mo»na pokaza¢, »e silna ró»niczkowalno±¢ w punkcie x0 implikuje ró»niczkowalno±¢ w sensieFrécheta w tym punkcie, przy czym F ′s(x0) = F ′(x0). Podobnie, ró»niczkowalno±¢ w sensie Fréchetaw punkcie x0 poci¡ga za sob¡ ró»niczkowalno±¢ w sensie Gâteaux w tym punkcie, przy czymF ′(x0) = F ′G(x0).
Prawdziwe jest tak»e nast¦puj¡ce:
Twierdzenie 4.1.1. Je±li operator F : U → Y jest ró»niczkowalny w sensie Gâteaux na U iodwzorowanie
U 3 x 7→ F ′G(x) ∈ L(X, Y )
jest ci¡gªe w punkcie x0 ∈ U (L(X, Y ) rozwa»ane jest z topologi¡ operatorow¡), to F jest silnieró»niczkowalny w punkcie x0.
Anulatorem L⊥ podprzestrzeni liniowej L przestrzeni BanachaX nazywamy zbiór tych ci¡gªychfunkcjonaªów liniowych x∗ : X → R, które zeruj¡ si¦ na L, tzn.
x∗x = 0
dla wszystkich x ∈ L.atwo zauwa»y¢, »e L⊥ 6= ∅ (θ ∈ L⊥). Ponadto zachodzi
42

4.1 Kilka niezb¦dnych faktów 4 ZASADA MNONIKÓW LAGRANGE'A
Lemat 4.1.1 (o nietrywialno±ci anulatora). Niech L b¦dzie domkni¦t¡ podprzestrzeni¡ prze-strzeni Banacha X, przy czym L 6= X. Wówczas anulator L⊥ zawiera element niezerowy.
Je±li X, Y s¡ przestrzeniami Banacha i Λ : X → Y jest ci¡gªym operatorem liniowym, tooperator Λ∗ : Y ∗ → X∗ okre±lony równo±ci¡
(Λ∗y∗)x = y∗(Λx)
dla y∗ ∈ Y ∗, x ∈ X nazywamy operatorem sprz¦»onym do operatora Λ.Niech teraz X, Y , Z b¦d¡ przestrzeniami Banacha, A : X → Y , B : X → Z - ci¡gªymi
operatorami liniowymi. Okre±lmy ci¡gªy operator liniowy C : X → Y × Z w nast¦puj¡cy sposób:
Cx = (Ax,Bx)
dla x ∈ X. Prawdziwy jest
Lemat 4.1.2 (o domkni¦to±ci obrazu). Je±li podprzestrze« ImA (10) jest domkni¦ta w Y ipodprzestrze« B(KerA) jest domkni¦ta w Z, to podprzestrze« ImC jest domkni¦ta w Y × Z.
W dowodach gªównych wyników tego rozdziaªu skorzystamy z nast¦puj¡cych twierdze«.
Twierdzenie 4.1.2 (o funkcji uwikªanej). Niech X b¦dzie przestrzeni¡ topologiczn¡, Y , Z- przestrzeniami Banacha. Je±li (x0, y0) ∈ X × Y , z0 ∈ Z, W jest otoczeniem punktu (x0, y0) wprzestrzeni X × Y , Ψ : W → Z - odwzorowaniem takim, »e Ψ(x0, y0) = z0 oraz
1) odwzorowanie x 7→ Ψ(x, y0) jest ci¡gªe w punkcie x0,
2) istnieje ci¡gªy operator liniowy Λ : Y → Z taki, »e Im Λ = Z oraz dla dowolnego ε > 0istnieje δ > 0 i otoczenie V punktu x0 takie, »e
‖Ψ(x, y1)−Ψ(x, y2)− Λ(y1 − y2)‖Z ¬ ε ‖y1 − y2‖Y
dla x ∈ V , ‖y1 − y0‖Y < δ, ‖y2 − y0‖Y < δ,
to istnieje staªa K > 0, otoczenie U punktu (x0, z0) w przestrzeni X × Z i odwzorowanieϕ : U → Y takie, »e
a) Ψ(x, ϕ(x, z)) = z,
b) ‖ϕ(x, z)− y0‖Y ¬ K ‖Ψ(x, y0)− z‖Z
dla (x, z) ∈ U .
Twierdzenie 4.1.3 (o oddzielaniu). Je±li C, D s¡ rozª¡cznymi wypukªymi zbiorami w prze-strzeni Rn, to istniej¡ wektor a 6= 0 oraz staªa b takie, »e
aTx ¬ b dla x ∈ C oraz aTx b dla x ∈ D,
tzn. hiperpªaszczyznax : aTx = b
rozdziela zbiory C i D.
W szczególno±ci, je±li C = 0, wówczas istnieje wektor a 6= 0 taki, »e
aTx 0 dla x ∈ D.10Symbolem ImA oznaczamy obraz operatora A, natomiast KerA oznacza j¡dro tego operatora.
43

4.2 Sformuªowanie zadania 4 ZASADA MNONIKÓW LAGRANGE'A
4.2 Sformuªowanie zadania
Przedmiotem naszych rozwa»a« b¦dzie zadanie minimalizacji funkcjonaªu okre±lonego na prze-strzeni liniowej b¡d¹ przestrzeni Banacha, przy pewnych dodatkowych ograniczeniach naªo»onychna argument funkcjonaªu. Zadanie tego typu (minimalizacyjne zadanie warunkowe) zapisujemy wnast¦puj¡cej formie
f0(x)→ inf ,x ∈ X i speªnia dodatkowe ograniczenia,
gdzie X jest przestrzeni¡ liniow¡ (przestrzeni¡ Banacha), a f0 : X → R funkcjonaªem.W tym rozdziale b¦dziemy bada¢ zadania tego typu pod k¡tem warunków koniecznych opty-
malno±ci.W przypadku, gdy brak jest owych dodatkowych ogranicze«, a X jest przestrzeni¡ Banacha,
tzn. gdy dane jest zadanief0(x)→ inf , (4.2.1)
punkt x∗ ∈ X nazywamy punktem lokalnego minimum dla tego zadania, je±li istnieje otoczenie Vpunktu x∗ takie, »e
f0(x∗) ¬ f0(x)
dla dowolnego x ∈ V . Prawdziwe jest nast¦puj¡ce
Twierdzenie 4.2.1 (zasada Fermata). Je±li x∗ jest punktem lokalnego minimum dla zadania(4.2.1) i funkcjonaª f0 jest ró»niczkowalny w sensie Gâteaux w punkcie x∗, to
(f0)′G(x∗) = θ.
Dowód. Z ró»niczkowalno±ci w sensie Gâteaux funkcjonaªu f0 w punkcie x∗ wynika ró»niczkowal-no±¢ funkcji
ϕ : [−1, 1] 3 t 7→ f0(x0 + th) ∈ R
w punkcie t = 0 przy dowolnie ustalonym h ∈ X. Oznacza to, wobec faktu, »e x0 jest punktemlokalnego minimum funkcjonaªu f0, i»
0 = ϕ′(0) = (f0)′G(x∗)h,
czyli (z dowolno±ci h ∈ X)(f0)′G(x∗) = θ.
44

4.2 Sformuªowanie zadania 4 ZASADA MNONIKÓW LAGRANGE'A
W dalszym ci¡gu b¦dziemy si¦ zajmowa¢ zadaniami, w których wyst¦puj¡ dodatkowe ograni-czenia i mog¡ by¢ zapisane w postaci równo±ci, nierówno±ci lub relacji przynale»no±ci. Dokªadniej,interesowa¢ nas b¦d¡ zadania postaci
f0(x)→ inf,F (x) = θ,
fi(x) ¬ 0, i = 1, . . . ,m,x ∈ A,
(4.2.2)
gdzie f0 : X → R, F : X → Y , fi : X → R, i = 1, . . . ,m, A ⊂ X; X, Y s¡ przestrzeniamiliniowymi lub przestrzeniami Banacha.
W przypadku, gdy brak jest ograniczenia F (x) = θ, funkcje f0, fi oraz zbiór A s¡ wypukªe, aX jest przestrzeni¡ liniow¡, powy»sze zadanie nazywane jest zadaniem wypukªym. W przypadkuza±, gdy X, Y s¡ przestrzeniami Banacha, f0, F s¡ ró»niczkowalne w sensie Frécheta na X i brakjest ogranicze« fi(x) ¬ 0, i = 1, . . . ,m, x ∈ A, powy»sze zadanie nazywane jest gªadkim zadaniemz ograniczeniami typu równo±ci.
Fundamentaln¡ rol¦ przy badaniu warunków koniecznych optymalno±ci dla zadania (4.2.2)odgrywa funkcja
L(x, y∗, λ0, λ1, . . . , λm) = y∗F (x) +m∑i=0
λifi(x),
gdzie x ∈ A, y∗ ∈ Y ∗, λ0, λ1, . . . , λm ∈ R. Funkcja L nazywana jest funkcj¡ Lagrange'a, natomiasty∗, λ0, λ1, . . . , λm mno»nikami Lagrange'a.
W przypadku zadania wypukªegof0(x)→ inf,
fi(x) ¬ 0, i = 1, . . . ,m,x ∈ A,
(4.2.3)
funkcja Lagrange'a przyjmuje posta¢
L(x, λ0, λ1, . . . , λm) =m∑i=0
λifi(x),
natomiast w przypadku gªadkiego zadania z ograniczeniami typu równo±cif0(x)→ inf,F (x) = θ,
(4.2.4)
funkcja ta jest nast¦puj¡ca:L(x, y∗, λ0) = y∗F (x) + λ0f0(x).
Rozszerzeniem zasady Fermata na przypadek zada« z ograniczeniami jest tzw. zasada Lagran-ge'a. Zasada ta, ogólnie mówi¡c, orzeka, »e je±li x∗ jest rozwi¡zaniem zadania z ograniczeniami, toistniej¡ mno»niki Lagrange'a, nie znikaj¡ce jednocze±nie i takie, »e x∗ speªnia warunki konieczneoptymalno±ci dla zadania zwi¡zanego z funkcj¡ Lagrange'a.
45

4.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera4 ZASADA MNONIKÓW LAGRANGE'A
4.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera
Niech dane b¦dzie zadanie wypukªe (4.2.3). Mówimy, »e x∗ jest rozwi¡zaniem globalnym zadania(4.2.3), je±li
fi(x∗) ¬ 0, i = 1, ...,m, (4.3.1)
x∗ ∈ A
orazf0(x∗) ¬ f0(x)
dla dowolnego x ∈ X takiego, »e
fi(x) ¬ 0, i = 1, ...,m, (4.3.2)
x ∈ A.
Mówimy natomiast, »e x∗ ∈ X jest rozwi¡zaniem lokalnym zadania (4.2.3), je±li speªnione s¡warunki (4.3.1) oraz istnieje otoczenie V punktu x∗ takie, »e
f0(x∗) ¬ f0(x)
dla dowolnego x ∈ V takiego, »e zachodz¡ warunki (4.3.2).Poni»sze twierdzenie pokazuje, »e w przypadku takiego zadania zasada Lagrange'a prawdziwa
jest w postaci wzmocnionej, a mianowicie rozwi¡zanie globalne x∗ zadania (4.2.3) jest rozwi¡za-niem globalnym odpowiedniego zadania zwi¡zanego z funkcj¡ Lagrange'a. Dokªadniej, mamy
Twierdzenie 4.3.1 (Kuhna-Tuckera). Niech X b¦dzie przestrzeni¡ liniow¡, f0, f1, . . . , fm :X → R funkcjami wypukªymi oraz A ⊂ X zbiorem wypukªym. Je±li x∗ jest rozwi¡zaniem global-nym zadania (4.2.3), to istniej¡ mno»niki Lagrange'a λ0 0, λ1 0, . . . , λm 0 nie znikaj¡cejednocze±nie i takie, »e
L(x∗, λ0, λ1, . . . , λm) = minx∈AL(x, λ0, λ1, . . . , λm) (4.3.3)
λifi(x∗) = 0, i = 1, . . . ,m. (4.3.4)
Je±li ponadto istnieje punkt x ∈ A taki, »e
fi(x) < 0, i = 1, . . . ,m, (4.3.5)
to λ0 6= 0 i mo»na przyj¡¢ λ0 = 1.Na odwrót, je±li λ0 > 0, λ1 0, . . . , λm 0, to warunki (4.3.3), (4.3.4) s¡ wystarczaj¡ce na
to, aby punkt x∗, który je speªnia, speªniaj¡cy tak»e ograniczenia
f1(x) ¬ 0, . . . , fm(x) ¬ 0,x ∈ A,
byª rozwi¡zaniem zadania (4.2.3).
Uwaga 4.3.1. Je±li X jest przestrzeni¡ liniowo-topologiczn¡, to ka»de rozwi¡zanie lokalne za-dania (4.2.3) jest jego rozwi¡zaniem globalnym.
46

4.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera4 ZASADA MNONIKÓW LAGRANGE'A
Dowód. (5) I. Konieczno±¢. Niech x∗ b¦dzie rozwi¡zaniem globalnym zadania (4.2.3). Bezzmniejszania ogólno±ci rozwa»a« mo»emy zaªo»y¢, »e
f0(x∗) = 0.
Rozwa»my nast¦puj¡cy zbiór
C = µ = (µ0, µ1, . . . , µm) ∈ R1+m; istnieje punkt x ∈ A taki, »e
f0(x) < µ0 oraz fi(x) ¬ µi dla i = 1, . . . ,m.
1. Zbiór C jest niepusty. Istotnie, wystarczy rozwa»y¢ punkt µ = (1, 0, . . . , 0), który nale»ydo C, bowiem f0(x∗) = 0 < 1, fi(x∗) ¬ 0, i = 1, . . . ,m, x ∈ A.
2. Zbiór C jest wypukªy. Istotnie, niech (µ10, µ
11, . . . , µ
1m) ∈ C, (µ2
0, µ21, . . . , µ
2m) ∈ C, x1, x2 ∈
A b¦d¡ takie, »ef0(x1) < µ1
0, f0(x2) < µ20,
fi(x1) ¬ µ1i , fi(x2) ¬ µ2
i , i = 1, . . . ,m.
Wówczas, dla dowolnego α ∈ (0, 1) mamy
αx1 + (1− α)x2 ∈ A
orazf0(αx1 + (1− α)x2) ¬ αf0(x1) + (1− α)f0(x2) < αµ1
0 + (1− α)µ20,
fi(αx1 + (1− α)x2) ¬ αfi(x1) + (1− α)fi(x2) ¬ αµ1i + (1− α)µ2
i , i = 1, . . . ,m.
Oznacza to, »eα(µ1
0, µ11, . . . , µ
1m) + (1− α)(µ2
0, µ21, . . . , µ
2m) ∈ C.
3. 0 /∈ C. Istotnie, w przeciwnym bowiem razie istniaªby punkt x ∈ A taki, »e
f0(x) < 0,
fi(x) ¬ 0, i = 1, . . . ,m,
co przeczyªoby temu, »e x∗ jest rozwi¡zaniem zadania (4.2.3).Zatem z twierdzenia o oddzielaniu wynika istnienie punktu (λ0, λ1, . . . , λm) ∈ R1+m r 0
takiego, »em∑i=0
λiµi 0 (4.3.6)
dla (µ0, µ1, . . . , µm) ∈ C.4. λi 0, i = 0, 1, . . . ,m. Istotnie, ustalmy bowiem dowolne ε > 0, wska¹nik i0 ∈ 0, 1, . . . ,m
i rozwa»my punkt postaci µε = (ε, . . . , ε, 1, ε, . . . , ε) ∈ R1+m, którego wspóªrz¦dna i0 jest równa 1.Oczywi±cie, µε ∈ C. A wi¦c z ostatniej nierówno±ci
λi0 −εm∑
i=0, i6=i0λi,
co, wobec dowolno±ci ε > 0, oznacza, »e λi0 0.5. Mno»niki λi, i = 1, . . . ,m, speªniaj¡ warunek (4.3.4). Ustalmy dowolny wska¹nik
i0 ∈ 1, . . . ,m. Je±li fi0(x∗) = 0, to oczywi±cie λi0fi0(x∗) = 0. Przypu±¢my wi¦c, »e fi0(x∗) < 0
47

4.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera4 ZASADA MNONIKÓW LAGRANGE'A
i rozwa»my punkt µδ = (δ, 0, . . . , 0, fi0(x∗), 0, . . . , 0) ∈ R1+m z dowolnie ustalon¡ liczb¡ δ > 0 ii0-ow¡ wspóªrz¦dn¡ równ¡ fi0(x∗). Oczywi±cie µδ ∈ C (wystarczy rozwa»y¢ punkt x∗ ∈ A). Znierówno±ci (4.3.6) wynika, »e
λi0fi0(x∗) −λ0δ,
co, wobec dowolno±ci δ > 0, oznacza, »e
λi0fi0(x∗) 0,
czyli λi0 ¬ 0. Wobec faktu, »e λi0 0, mamy wi¦c równo±¢ λi0 = 0 i w konsekwencji
λi0fi0(x∗) = 0.
6. Speªniony jest warunek (4.3.3). Niech x ∈ A. Rozwa»my punkt postaci
(f0(x) + δ, f1(x), . . . , fm(x)) ∈ R1+m,
gdzie δ > 0 jest dowolnie ustalone. Oczywi±cie punkt ten nale»y do zbioru C (wystarczy rozwa»y¢punkt x). Zatem, korzystaj¡c z nierówno±ci (4.3.6), mamy
λ0f0(x) +m∑i=1
λifi(x) −λ0δ.
St¡d, wobec dowolno±ci δ > 0 i x ∈ A,
L(x, λ0, λ1, . . . , λm) 0
dla x ∈ A. Ponadto z (4.3.4) i faktu, »e f0(x∗) = 0 mamy
0 =m∑i=0
λifi(x∗) = L(x∗, λ0, λ1, . . . , λm). (4.3.7)
A wi¦cL(x∗, λ0, λ1, . . . , λm) = min
x∈AL(x, λ0, λ1, . . . , λm). (4.3.8)
Przypu±¢my teraz, »e speªniony jest warunek (4.3.5), tzn. istnieje x ∈ A taki, »e
fi(x) < 0, i = 1, . . . ,m,
oraz λ0 = 0. Wówczas z (4.3.7) wynika, »e
L(x, λ0, λ1, . . . , λm) = L(x, 0, λ1, . . . , λm) =m∑i=1
λifi(x)
< 0 = L(x∗, λ0, λ1, . . . , λm),
co jest sprzeczne z (4.3.8). Zatem λ0 > 0.II. Dostateczno±¢. Zaªó»my, »e istniej¡ mno»niki λ0 > 0, λ1, . . . , λm 0 i speªnione s¡
warunki (4.3.3), (4.3.4), przy czym x∗ ∈ A, f1(x∗) ¬ 0, . . . , fm(x∗) ¬ 0. Bez zmniejszania ogólno±ci
48

4.3 Zadanie wypukªe. Twierdzenie Kuhna-Tuckera4 ZASADA MNONIKÓW LAGRANGE'A
rozwa»a« mo»emy zaªo»y¢, »e λ0 = 1. Wówczas, dla dowolnego x ∈ A takiego, »e fi(x) ¬ 0,i = 1, . . . ,m, mamy
f0(x) f0(x) +m∑i=1
λifi(x) = L(x, 1, λ1, . . . , λm) L(x∗, 1, λ1, . . . , λm)
= f0(x∗) +m∑i=1
λifi(x∗) = f0(x∗).
Oznacza to, wobec dowolno±ci x ∈ A takiego, »e fi(x) ¬ 0, i = 1, . . . ,m, i» x∗ jest rozwi¡zaniemglobalnym zadania (4.2.3).
Twierdzenie Kuhna-Tuckera jest równie» cz¦sto formuªowane z wykorzystaniem poj¦cia punktusiodªowego.
Twierdzenie 4.3.2 (*). Niech X b¦dzie przestrzeni¡ liniow¡, f0, f1, . . . , fm funkcjami wypu-kªymi, A ⊂ X zbiorem wypukªym. Zaªó»my, »e funkcje f1, . . . , fm speªniaj¡ warunek (4.3.5). Wów-czas, je±li punkt x∗ ∈ A jest taki, »e
fi(x∗) ¬ 0, i = 1, . . . ,m,
to x∗ jest rozwi¡zaniem globalnym zadania (4.2.3) wtedy i tylko wtedy, gdy istniej¡ mno»niki La-grange'a λ1 0, ..., λm 0 takie, »e
minx∈AL(x, 1, λ1, . . . , λm) = L(x∗, 1, λ1, . . . , λm) = max
λ10,...,λm0L(x∗, 1, λ1, . . . , λm). (4.3.9)
Dowód. Konieczno±¢. Wobec twierdzenia Kuhna-Tuckera wystarczy pokaza¢, »e prawdziwa jestdruga równo±¢ wyst¦puj¡ca w (4.3.9), tzn.
L(x∗, 1, λ1, . . . , λm) = maxλ10,...,λm0
L(x∗, 1, λ1, . . . , λm).
Istotnie, z warunku (4.3.4) wynika, »e
L(x∗, 1, λ1, ..., λm) = f0(x∗) +m∑i=1
λifi(x∗) = f0(x∗)
f0(x∗) +m∑i=1
λifi(x∗) = L(x∗, 1, λ1, ..., λm)
dla dowolnych λ1 0, ..., λm 0.Dostateczno±¢. Wobec twierdzenia Kuhna-Tuckera wystarczy pokaza¢, »e zachodzi warunek
(4.3.4). Otó» istotnie, z drugiej równo±ci wyst¦puj¡cej w warunku (4.3.9) wynika, »e
f0(x∗) +m∑i=1
λifi(x∗) f0(x∗) +m∑i=1
λifi(x∗)
dla dowolnych λ1 0, ..., λm 0, czylim∑i=1
λifi(x∗) m∑i=1
λifi(x∗) (4.3.10)
dla dowolnych λ1 0, ..., λm 0. Ustalmy teraz wska¹nik i0 ∈ 1, ...,m i rozwa»my liczby λi = λidla i 6= i0 oraz λi0 = 0. Z warunku (4.3.10) mamy
m∑i=1
λifi(x∗) m∑
i=1,i 6=i0λifi(x∗) + 0 · fi0(x∗)
49

4.4 Gªadkie zadanie z ograniczeniami typu równo±ci4 ZASADA MNONIKÓW LAGRANGE'A
sk¡dλi0fi0(x∗) 0.
Z drugiej stronyλi0fi0(x∗) ¬ 0,
bowiem λi0 0 i fi0(x∗) ¬ 0. A wi¦cλi0fi0(x∗) = 0.
Z dowolno±ci i0 ∈ 1, . . . ,m wynika teza.
4.4 Gªadkie zadanie z ograniczeniami typu równo±ci
Niech dane b¦dzie zadanie (4.2.4). Mówimy, »e x∗ ∈ X jest rozwi¡zaniem lokalnym zadania (4.2.4),je±li
F (x∗) = 0
oraz istnieje otoczenie V punktu x∗ takie, »e
f0(x∗) ¬ f0(x)
dla dowolnego x ∈ V takiego, »eF (x) = 0.
Twierdzenie 4.4.1. Niech X, Y b¦d¡ przestrzeniami Banacha, f0 : X → R, F : X → Y odwzo-rowaniami silnie ró»niczkowalnymi w punkcie x∗ ∈ X. Je±li x∗ jest punktem lokalnego minimumdla zadania (4.2.4) i ImF ′(x∗) jest domkni¦t¡ podprzestrzeni¡ przestrzeni Y , to istniej¡ mno»nikiLagrange'a λ0 ∈ R, y∗ ∈ Y ∗ nie znikaj¡ce jednocze±nie i takie, »e(11)
Lx(x∗, λ0, y∗)x = λ0f
′0(x∗)x+ y∗(F ′(x∗)x) = 0 (4.4.1)
dla dowolnego x ∈ X.Je±li ponadto ImF ′(x∗) = Y , to λ0 6= 0.
Dowód. (*)Rozwa»my odwzorowanie
F : X 3 x 7→ (f0(x)− f0(x∗), F (x)) ∈ R×Y .
Oczywi±cie F jest silnie ró»niczkowalne w punkcie x∗, przy czym
F ′s(x∗) = F ′(x∗) = (f ′0(x∗), F ′(x∗)).
Rozwa»my dwa przypadki.1o ImF′(x∗) 6= R×Y. Poniewa» zbiór ImF ′(x∗) jest domkni¦ty, a zbiór
f ′0(x∗)(KerF ′(x∗)) jest równy 0 lub R, wi¦c z lematu o domkni¦to±ci obrazu wynika, »e zbiór
11Je±li dany jest operator L : X×Y → Z i punkt (x0, y0) ∈ X×Y (X,Y, Z - przestrzenie Banacha), to ró»niczk¦odwzorowania
X 3 x 7→ L(x, y0) ∈ Z
w punkcie x0 ∈ X nazywamy ró»niczk¡ cz¡stkow¡ operatora L wzgl¦dem zmiennej x w punkcie (x0, y0) i oznaczamysymbolem Lx(x0, y0).
50

4.4 Gªadkie zadanie z ograniczeniami typu równo±ci4 ZASADA MNONIKÓW LAGRANGE'A
ImF ′(x∗) jest domkni¦ty w R×Y . Z uwagi zatem na zaªo»enie okre±laj¡ce rozpatrywany przypa-dek, ImF ′(x∗) jest wªa±ciw¡ podprzestrzeni¡ domkni¦t¡ przestrzeni R×Y . Na podstawie lematuo nietrywialno±ci anulatora mo»emy wi¦c wnosi¢ o istnieniu mno»ników λ0 ∈ R, y∗ ∈ Y ∗ nieznikaj¡cych jednocze±nie i takich, »e
λ0f′0(x∗)x+ y∗(F ′(x∗)x) = 0
dla dowolnego x ∈ X.2o ImF′(x∗) = R×Y. Przyjmuj¡c w twierdzeniu o funkcji uwikªanej X = x0 (x0 jest
dowolnym ustalonym zbiorem jednoelementowym), Y = X, Z = R×Y , Ψ(x, y) = Ψ(x0, y) =F(x), Λ = F ′(x∗), y0 = x∗, z0 = 0 ∈ R×Y ), stwierdzamy, na podstawie tego» twierdzenia, »eistnieje staªa K > 0, otoczenie V punktu (0, 0) ∈ R×Y i odwzorowanie ϕ : V → X takie, »e
F(ϕ(α, y)) = (α, y) (4.4.2)
oraz‖ϕ(α, y)− x∗‖X ¬ K ‖F(x∗)− (α, y)‖R×Y (4.4.3)
dla (α, y) ∈ V . Z okre±lenia topologii w iloczynie kartezja«skim przestrzeni topologicznych wynikaoczywi±cie istnienie liczby ε0 > 0 takiej, »e
[−ε, ε]× 0 ⊂ V ⊂ R×Y .Poªó»my x(ε) = ϕ(−ε, 0) ∈ X dla dowolnego ε takiego, »e 0 < ε < ε0. Wówczas, z warunku (4.4.2)otrzymujemy
F(x(ε)) = F(ϕ(−ε, 0)) = (−ε, 0),
czylif0(x(ε)) = f0(x∗)− ε
iF (x(ε)) = 0.
Natomiast z warunku (4.4.3) wynika, »e
‖x(ε)− x∗‖X = ‖ϕ(−ε, 0)− x∗‖X ¬ K ‖(0, 0)− (−ε, 0)‖R×Y = Kε,
co oznacza, »e x(ε) speªnia ograniczenia typu równo±ci dla dowolnego ε takiego, »e 0 < ε < ε0
oraz x(ε) −→ε→0+
x∗ i
f0(x(ε)) = f0(x∗)− ε < f0(x∗).
Jest to sprzeczne z faktem, »e x∗ jest lokalnym rozwi¡zaniem zadania (4.2.4). Zatem rozpatrywanyprzypadek nie mo»e mie¢ miejsca i tym samym pierwsza cz¦±¢ twierdzenia zostaªa udowodniona.
Zaªó»my teraz, »e ImF ′(x∗) = Y i λ0 = 0. Wówczas, y∗ 6= 0 i warunek (4.4.1) przyjmuje posta¢
y∗(F ′(x∗)x) = 0
dla dowolnego x ∈ X.Niech teraz y ∈ Y b¦dzie takim punktem, »e
y∗y 6= 0,
a x ∈ X - takim, »eF ′(x∗)x = y.
Wówczas0 6= y∗y = y∗(F ′(x∗)x) = 0.
Otrzymana sprzeczno±¢ dowodzi faªszywo±ci przypuszczenia, »e λ0 = 0.
51

5 ZASADA MAKSIMUM PONTRIAGINA
5 Zasada maksimum Pontriagina
Nast¦puj¡cy rozdziaª jest rozszerzeniem czasooptymalnej zasady maksimum z rozdziaªu 3, a zasadamaksimum opisana w nim pozwala rozwa»a¢ szersz¡ klas¦ zagadnie« sterowania optymalnego.
5.1 Rachunek wariacyjny, równania Hamiltona
Zaczniemy ten paragraf od krótkiego wprowadzenia do metod wariacyjnych. Zagadnienia te sta-nowi¡ motywacj¦ zasady maksimum Pontriagina.
Zaczniemy od sformuªowania podstawowego zadania rachunku wariacyjnego.Zaªó»my, »e mamy dan¡ funkcj¦ gªadk¡ L : Rn × Rn → R, L (x, v) nazwiemy lagran»janem.
Niech T > 0, x0, x1 ∈ Rn b¦d¡ ustalone. Podstawowe zadanie rachunku wariacyjnego polega naznalezieniu krzywej x∗ : [0, T ]→ Rn, która minimalizuje funkcjonaª caªkowy
I (x) :=∫ T
0L (x (t) , x (t)) dt→ inf (5.1.1)
w klasie funkcji x : [0, T ]→ Rn speªniaj¡cych warunki x (0) = x0, x (T ) = x1.Postaramy si¦ odpowiedzie¢ na pytanie, jak mo»na scharakteryzowa¢ x∗, które jest rozwi¡za-
niem powy»szego zadania?
5.1.1 Równania Eulera-Lagrange'a
B¦dziemy pisa¢ L = L (x, v), gdzie x oznacza¢ b¦dzie pozycj¦, natomiast v pr¦dko±¢. Przyjmiemypewne oznaczenia
∂L
∂xi= Lxi ,
∂L
∂vi= Lvi , i = 1, . . . , n,
OxL := (Lx1 , . . . , Lxn) , OvL := (Lv1 , . . . , Lvn) .
Twierdzenie 5.1.1 (Równanie Eulera-Lagrange'a). Je±li x∗ jest rozwi¡zaniem zadaniawariacyjnego (5.1.1), to x∗ speªnia równanie Eulera-Lagrange'a
d
dt(OvL (x∗ (t) , x∗ (t))) = OxL (x∗ (t) , x∗ (t)) . (5.1.2)
Uwaga 5.1.1. Powy»sze twierdzenie mówi, »e je±li potramy poda¢ wszystkie rozwi¡zania rów-nania (5.1.2), to wiemy, »e rozwi¡zanie oryginalnego zadania wariacyjnego (zakªadaj¡c, »e istnieje)jest po±ród tych rozwi¡za«. Zauwa»my równie», »e (5.1.2) jest ukªadem n równa« ró»niczkowychzwyczajnych stopnia drugiego, przy czym i-te równanie jest postaci
d
dt(Lvi (x∗ (t) , x∗ (t))) = Lxi (x∗ (t) , x∗ (t)) .
Dowód. 1. Niech y : [0, T ]→ Rn oznacza funkcj¦ gªadk¡ speªniaj¡c¡ y (0) = y (T ) = 0. Zdeniuj-my
i (τ) := I (x∗ + τy)
dla τ ∈ R. Zauwa»my, »e x∗ + τy przyjmuje wªa±ciwe warto±ci w punktach ko«cowych. St¡d,poniewa» x∗ jest minimajzerem, dostajemy
i (τ) I (x∗) = i (0) .
52

5.1 Rachunek wariacyjny, równania Hamiltona 5 ZASADA MAKSIMUM PONTRIAGINA
W konsekwencji funkcja rzeczywista i ma minimum w τ = 0, a st¡d
i′ (0) = 0.
2. Wyliczymy i′ (τ). Zauwa»my, »e
i (τ) =∫ T
0L (x∗ (t) + τy (t) , x∗ (t) + τ y (t)) dt,
a poniewa» L jest funkcj¡ gªadk¡
i′ (τ) =∫ T
0[n∑i=1
Lxi (x∗ (t) + τy (t) , x∗ (t) + τ y (t)) yi (t)
+n∑i=1
Lvi (x∗ (t) + τy (t) , x∗ (t) + τ y (t)) yi (t)]dt.
St¡d dla τ = 0 mamy
0 = i′ (0) =n∑i=1
∫ T
0(Lxi (x∗ (t) , x∗ (t)) yi (t) + Lvi (x∗ (t) , x∗ (t)) yi (t)) dt.
Równo±¢ ta zachodzi dla wszystkich gªadkich y : [0, T ]→ Rn, dla których y (0) = y (T ) = 0.3. Ustalmy j ∈ 1, . . . , n. Wybierzmy y tak, aby
yi (t) ≡ 0, i 6= j, yj (t) = ψ (t) ,
gdzie ψ jest pewn¡ ustalon¡ funkcj¡. St¡d i z powy»szego dostajemy, »e
0 =∫ T
0
(Lxj (x∗ (t) , x∗ (t))ψ (t) + Lvj (x∗ (t) , x∗ (t)) ψ (t)
)dt.
Scaªkujmy drugi skªadnik tej caªki przez cz¦±ci pami¦taj¡c, »e ψ (0) = ψ (T ) = 0.Dostaniemy
0 =∫ T
0
(Lxj (x∗ (t) , x∗ (t))− d
dtLvj (x∗ (t) , x∗ (t))
)ψ (t) dt. (5.1.3)
Zachodzi to dla wszystkich gªadkich ψ : [0, T ]→ R, ψ (0) = ψ (T ) = 0, co oznacza, »e
Lxj (x∗ (t) , x∗ (t))− d
dtLvj (x∗ (t) , x∗ (t)) = 0
dla wszystkich t ∈ [0, T ]. Aby si¦ o tym przekona¢, zaªó»my przeciwnie, np. »e Lxj − ddtLvj jest
dodatnie na pewnym podprzedziale I ⊂ [0, T ]. Wybierzmy wtedy ψ ≡ 0 poza I oraz ψ > 0 na I.Wtedy ∫ T
0
(Lxj −
d
dtLvj
)ψdt > 0,
co jest sprzeczne z (5.1.3). Z dowolno±ci j ∈ 1, . . . , n, dostajemy tez¦.
53

5.1 Rachunek wariacyjny, równania Hamiltona 5 ZASADA MAKSIMUM PONTRIAGINA
5.1.2 Zastosowanie do równa« Hamiltona
Dla danej krzywej x : [0, T ]→ Rn, zdeniujmy
p (t) = OvL (x (t) , x (t)) , t ∈ [0, T ] . (5.1.4)
Nazwiemy p uogólnionym wektorem stanu.Postaramy si¦ teraz zapisa¢ równania Eulera-Lagrange'a jako ukªad równa« ró»niczkowych
pierwszego stopnia dla x i p.Zaªó»my w tym celu, »e dla dowolnych x, p ∈ Rn, mo»emy rozwi¡za¢ równanie
p = OvL (x, v) (5.1.5)
wzgl¦dem v jako funkcj¦ x i p. Innymi sªowy, zaªó»my, »e mo»emy rozwi¡za¢ (5.1.5) dla v = v (x, p).Zdeniujmy Hamiltonian H : Rn × Rn → R jako
H (x, p) = p · v (x, p)− L (x, v (x, p)) ,
gdzie v = v (x, p) byªo okre±lone wy»ej.Oznaczymy pochodne cz¡stkowe H przez
∂H
∂xi= Hxi ,
∂H
∂pi= Hpi i = 1, . . . , n,
orazOxH := (Hx1 , . . . , Hxn) , OpH := (Hp1 , . . . , Hpn) .
Twierdzenie 5.1.2 (Równana Hamiltona). Niech x b¦dzie rozwi¡zaniem równa« Eulera-Lagrange'a (5.1.2) i zdeniujmy p jak w (5.1.4). Wtedy para x, p speªnia równania Hamiltona
x (t) = OpH (x (t) , p (t)) ,p (t) = −OxH (x (t) , p (t)) .
(5.1.6)
Ponadto, odwzorowanie t 7→ H (x (t) , p (t)) jest staªe.
Dowód. Przypomnijmy, »eH (x, p) = p·v (x, p)−L (x, v (x, p)), gdzie v = v (x, p) lub równowa»niep = OvL (x, v). St¡d
OxH (x, p) = p · Oxv − OxL (x, v (x, p))− OvL (x, v (x, p)) · Oxv
= −OxL (x, v (x, p)) ,
poniewa» p = OvL (x, v). Wiemy, »e p (t) = OvL (x (t) , x (t)) wtedy i tylko wtedy, gdy x (t) =v (x (t) , p (t)). Wi¦c równania Eulera-Lagrange'a (5.1.2) implikuj¡
p (t) =d
dt(OvL (x (t) , x (t))) = OxL (x (t) , x (t))
= OxL (x (t) , v (x (t) , p (t))) = −OxH (x (t) , p (t)) .
atwo równie» wida¢, »e
OpH (x, p) = v (x, p) + p · Opv − OvL · Opv = v (x, p) ,
54

5.2 Sformuªowanie zasady maksimum Pontriagina 5 ZASADA MAKSIMUM PONTRIAGINA
bo p = OvL (x, v (x, p)). To implikuje równo±¢
OpH (x (t) , p (t)) = v (x (t) , p (t)) .
Alep (t) = OvL (x (t) , x (t))
oraz x (t) = v (x (t) , p (t)). Wi¦c
x (t) = OpH (x (t) , p (t)) .
Ostatecznie, wystarczy zaobserwowa¢, »e
d
dtH (x (t) , p (t)) = OxH · x (t) + OpH · p (t) = OxH · OpH + OpH · (−OxH) = 0.
5.2 Sformuªowanie zasady maksimum Pontriagina
Po tym wst¦pie przejdziemy do gªównego wyniku rozdziaªu, twierdzenia, które mówi, »e je±li u∗ jeststerowaniem optymalnym dla pewnego zadania, to istnieje uogólniony wektor stanu p∗ speªniaj¡cyzasad¦ maksimum. Funkcj¦ p∗ mo»emy traktowa¢ jako pewien typ mno»nika Lagrange'a.
5.2.1 Ustalony czas, swobodny punkt ko«cowy
Zaczniemy od zdeniowania zadania sterowania optymalnego.Mamy dany zbiór (ograniczony) A ⊂ Rm, funkcj¦ f : Rn × A → Rn oraz x0 ∈ Rn. Zbiór
sterowa« dla naszego zadania okre±limy nast¦puj¡co
UA =⋃t>t0
UA[0, t],
gdzieUA[0, t] = u : [0, t]→ A; u jest funkcj¡ mierzaln¡.
Niech b¦dzie dany nieliniowy ukªad autonomiczny
x(t) = f(x(t), u(t)), (5.2.1)
x(0) = x0.
W tym zadaniu mamy nast¦puj¡cy funkcjonaª wypªaty
P (u) =∫ T
0r (x (t) , u (t)) dt+ g (x (T )) , (5.2.2)
gdzie T > 0 oznacza ustalony czas ko«cowy, r : Rn × A → R oraz g : Rn → R oznacza wypªat¦ko«cow¡.
Nasze zadanie w tym wypadku polega na znalezieniu sterowania u∗ takiego, »e
P (u∗) = maxu∈UA
P (u) .
Zasada maksimum, sformuªowana poni»ej, mówi, »e istnieje funkcja p∗, która wraz z trajektori¡optymaln¡ x∗ speªnia równania Hamiltona z twierdzenia 5.1.2, gdzie Hamiltonian jest okre±lonynast¦puj¡co
H (x, p, v) := f (x, v) · p+ r (x, a) , x, p ∈ Rn, a ∈ A. (5.2.3)
55

5.2 Sformuªowanie zasady maksimum Pontriagina 5 ZASADA MAKSIMUM PONTRIAGINA
Twierdzenie 5.2.1 (Zasada maksimum Pontriagina). Zaªó»my, »e u∗ jest sterowaniemoptymalnym dla (5.2.1), (5.2.2) oraz x∗ jest trajektori¡ dla tego sterowania.Wtedy istnieje funkcja p∗ : [0, T ]→ Rn taka, »e
x∗ (t) = OpH (x∗ (t) , p∗ (t) , u∗ (t)) , (5.2.4)
p∗ (t) = −OxH (x∗ (t) , p∗ (t) , u∗ (t)) (5.2.5)
orazH (x∗ (t) , p∗ (t) , u∗ (t)) = max
a∈AH (x∗ (t) , p∗ (t) , a) . (5.2.6)
Ponadto, odwzorowanie t 7→ H (x∗ (t) , p∗ (t) , u∗ (t)) jest staªe. Mamy równie» nast¦puj¡cy warunekko«cowy
p∗ (t) = Og (x∗ (T )) . (5.2.7)
Równanie (5.2.5) nazywamy równaniem sprz¦»onym. Warunek (5.2.7) jest równie» nazywanywarunkiem transwersalno±ci.
Równanie (5.2.4) mo»emy zapisa¢ dla 1 ¬ i ¬ n nast¦puj¡co
xi∗ (t) = Hpi (x∗ (t) , p∗ (t) , u∗ (t)) = f i(x∗(t), u∗(t)),
co jest po prostu oryginalnym równaniem ruchu. Natomiast równanie (5.2.5) mówi, »e
pi∗ (t) = −Hxi (x∗ (t) , p∗ (t) , u∗ (t))
= −n∑j=1
pj∗ (t) f ixi(x∗(t), u∗(t))− rxi(x∗(t), u∗(t)).
5.2.2 Swobodny czas, ustalony punkt ko«cowy
Teraz przejdziemy do przypadku, gdy mamy ustalony punkt ko«cowy. Jak poprzednio dla danegosterowania u ∈ UA szukamy rozwi¡zania ukªadu
x(t) = f(x(t), u(t)), (5.2.8)
x(0) = x0.
Zakªadamy, »e punkt ko«cowy x1 ∈ Rn jest dany. W tym wypadku dla funkcjonaªu wypªaty(5.2.2) zakªadamy, »e g ≡ 0, tzn.
P (u) =∫ τ
0r (x (t) , u (t)) dt, (5.2.9)
gdzie τ = τ (u) jest czasem osi¡gni¦cia punktu docelowego x1.Hamiltonian deniujemy jak w poprzednim paragrae we wzorze (5.2.3).
Twierdzenie 5.2.2 (Zasada maksimum Pontriagina). Zaªó»my, »e u∗ jest sterowaniemoptymalnym dla (5.2.8), (5.2.9) oraz x∗ jest trajektori¡ dla tego sterowania.Wtedy istnieje funkcja p∗ : [0, T ] → Rn taka, »e speªnione s¡ równania (5.2.4), (5.2.5) orazwarunek maksymalizacji (5.2.6). Ponadto,
H (x∗ (t) , p∗ (t) , u∗ (t)) ≡ 0.
56

5.2 Sformuªowanie zasady maksimum Pontriagina 5 ZASADA MAKSIMUM PONTRIAGINA
5.2.3 Zastosowania i przykªady
Nast¦puj¡ce przykªady obrazuj¡ jak zasada maksimum Pontriagina dziaªa w praktyce. W nie-których przypadkach pozwala ona rozwi¡za¢ zagadnienie sterowania optymalnego, w innych dajepewne przydatne informacje na temat sterowania optymalnego.
Przykªad 5.2.1 (Kontrola produkcji i konsumpcji). Powrócimy teraz do przykªadu 1.4.1z paragrafu Przykªady. Przypomnijmy oznaczenia
x (t) - ilo±¢ towaru wyprodukowanego w czasie t,
u (t) - cz¦±¢ produkcji zainwestowana powtórnie w czasie t.
Sterowanie speªnia naturalne ograniczenie 0 ¬ u (t) ¬ 1 dla dowolnej chwili t 0, tzn. A = [0, 1].Dynamika naszego modelu opisana jest nast¦puj¡cym równaniem ró»niczkowym zwyczajnym
x (t) = u (t)x (t) ,x (0) = x0.
Dla uproszczenie przyjmujemy, »e k = 1. Chcemy zmaksymalizowa¢ swoj¡ konsumpcj¦, tj.
J(u) =∫ T
0(1− u (t))x (t) dt.
Pytamy, jak mo»na schrakteryzowa¢ sterowanie optymalne u∗?Zastosujemy zasad¦ maksimum Pontriagina. Mamy n = m = 1 oraz »eby uªatwi¢ zapis nie b¦-dziemy pisa¢ indeksów *. W naszym przypadku
f (x, a) = xa, g ≡ 0, r (x, a) = (1− a)x.
St¡dH (x, p, a) = f (x, a) p+ r (x, a) = pax+ (1− a)x = x+ ax (p− 1) .
Równanie ruchu ma posta¢x (t) = Hp = u (t)x (t) , (5.2.10)
natomiast równanie sprz¦»one
p (t) = −Hx = −1− u (t) (p (t)− 1) . (5.2.11)
Z warunku transwersalno±ci uzyskamy
p (T ) = gx (x (T )) = 0. (5.2.12)
Ponadto, z zasady maksimum mamy równo±¢
H (x (t) , p (t) , u (t)) = maxa∈A
H (x (t) , p (t) , a) = max0¬a¬1
x (t) + ax (t) (p (t)− 1) . (5.2.13)
Postaramy si¦ teraz wywnioskowa¢ pewne informacje na temat sterowania optymalnego u z rów-na« (5.2.10), (5.2.11), (5.2.13) oraz (5.2.12).Z (5.2.13) wynika, »e warto±¢ u (t) musi by¢ tak wybrana, aby maksymalizowa¢ wyra»enie ax (t) (p (t)− 1)dla 0 ¬ a ¬ 1, poniewa» x (t) > 0. St¡d
u (t) =
1 dla p (t) > 1,0 dla p (t) ¬ 1.
57

5.2 Sformuªowanie zasady maksimum Pontriagina 5 ZASADA MAKSIMUM PONTRIAGINA
Wi¦c je±li b¦dziemy zna¢ p (·), to mo»emy zapisa¢ sterowanie optymalne w sposób jawny.Wyznaczamy p (·) z równa« (5.2.11) i (5.2.12), mamy
p (t) = −1− u (t) (p (t)− 1)p (T ) = 0,
dla t ∈ [0, T ]. Poniewa» p (T ) = 0, mo»emy wywnioskowa¢ z ci¡gªo±ci p, »e p (t) ¬ 1 dla t bliskichT , t ¬ T . W takim razie u (t) = 0 dla tych warto±ci t. St¡d p (t) = −1 i p (t) = T − t dla czasówspeªniaj¡cych powy»szy warunek. Mamy wi¦c p (t) = T − t tak dªugo, jak p (t) ¬ 1, a to oznacza,»e T − 1 ¬ t ¬ T .Dla czasów t ¬ T − 1, które s¡ bliskie T − 1 uzyskujemy podobnie jak poprzednio informacj¦, »eu (t) = 1. Dla takich czasów równanie (5.2.11) przyjmuje posta¢
p (t) = −1− (p (t)− 1) = −p (t) .
Korzystaj¡c z warunku p (T − 1) = 1 dostajemy, »e p (t) = eT−1−t > 1 dla wszystkich t ∈[0, T − 1). W szczególno±ci widzimy, »e w tym przedziale czasowym sterowanie nie ma przeª¡-cze«. W konsekwencji powracaj¡c do oznaczenia z * na sterowanie optymalne mo»emy napisa¢
u∗ (t) =
1 dla 0 ¬ t ¬ t∗,0 dla t∗ ¬ t ¬ T
dla czasu preª¡czenia t∗ = T − 1.Zostawiamy jako ¢wiczenie wyznaczenie czasu przeª¡czenia dla przypadku, gdy k 6= 1.
58

LITERATURA LITERATURA
Literatura
[1] S. Boyd i L. Vandenberghe, Convex Optimization, Cambridge University Press, 2004 (dost¦pnarównie» online: http://www.stanford.edu/~boyd/cvxbook/).
[2] L. C. Evans, An Introduction to Mathematical Optimal Control Theory, wykªady dost¦pne nastronie autora http://math.berkeley.edu/ ~evans/.
[3] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, Oxford Uni-versity Press, 1991.
[4] D. Idczak, Podstawy Teorii Sterowania Optymalnego, wykªad.
[5] G. Leitmann, Wprowadzenie do Teorii Sterownia Optymalnego, Wydawnictwa Naukowo-Techniczne, 1971.
[6] J. Macki i A. Strauss, Introduction to Optimal Control Theory, Sringer, 1982.
[7] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze i E. F. Mishchenko, The MathematicalTheory of Optimal Processes, Interscience, 1962.
59