Teoria de control
22
REPÚBLICA BOLIVARIANA DE VENEZUELA MINISTERIO DEL P.P.P. LA EDUCACIÓN SUPERIOR I.U.P. “SANTIAGO MARIÑO” EXTENSIÓN – MARACAIBO Teoría De Control RESPUESTA EN FRECUENCIA Realizado por: JUAN CARLOS LAGUNA C.I: 20.726.131 MARACAIBO, ENERO DE 2016
-
Upload
juanclp14 -
Category
Engineering
-
view
371 -
download
0
Transcript of Teoria de control

REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL P.P.P. LA EDUCACIÓN SUPERIOR
I.U.P. “SANTIAGO MARIÑO”
EXTENSIÓN – MARACAIBO
Teoría De Control
RESPUESTA EN FRECUENCIA
Realizado por:
JUAN CARLOS LAGUNA
C.I: 20.726.131
MARACAIBO, ENERO DE 2016

INTRODUCCION
El diseño de sistemas de control con retroalimentación en la industria se realiza
probablemente empleando en más ocasiones los métodos de la respuesta en
frecuencia que cualquier otro método. La razón principal de la popularidad de
estos métodos es que proporcionan diseños buenos desde el punto de vista de
la incertidumbre en el modelo de planta.
Otra ventaja de la respuesta en frecuencia es la facilidad con la que se puede
usar la información experimental para propósitos de diseño; para sistemas
relativamente simples, la respuesta en frecuencia es todavía el método de diseño
más rentable. Una desventaja del método es que la teoría en la que se basa es
algo complicada y requiere un conocimiento bastante amplio de las variables
complejas. Sin embargo, la metodología de diseño es sencilla y la visión que se
adquiere al aprender la teoría bien vale la pena el esfuerzo.
DESARROLLO
1.- FUNCIÓN DE TRANSFERENCIA.
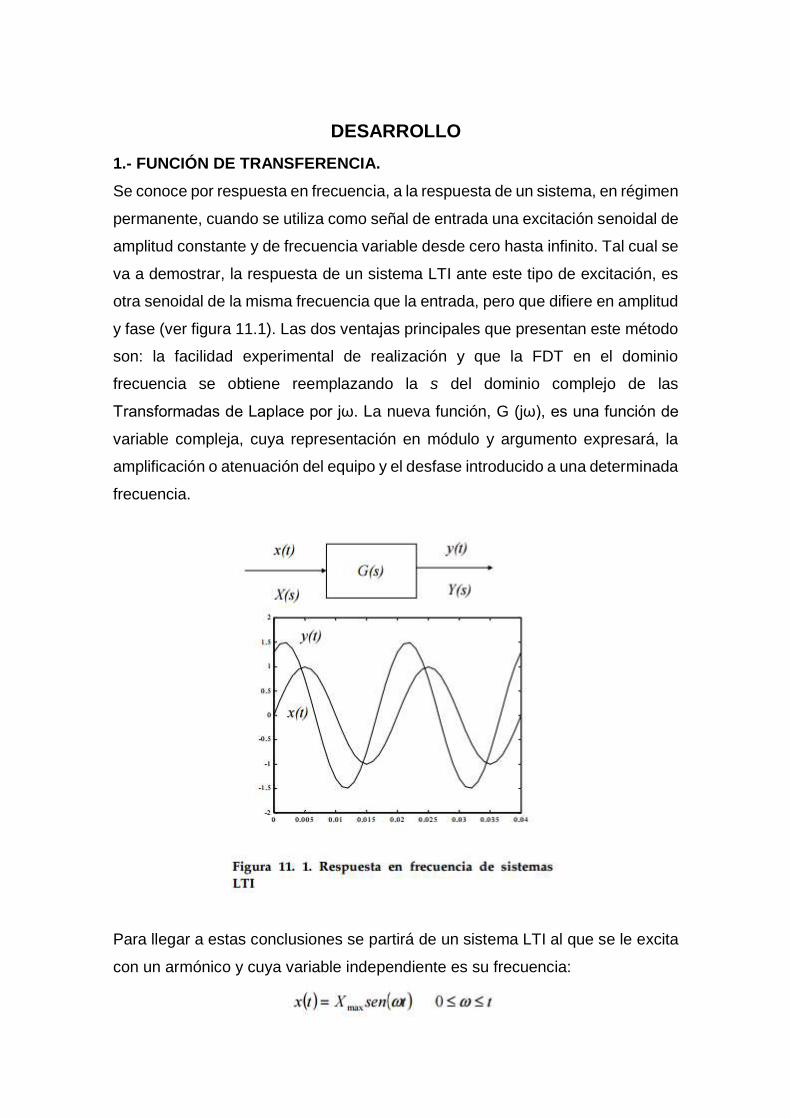
Se conoce por respuesta en frecuencia, a la respuesta de un sistema, en régimen
permanente, cuando se utiliza como señal de entrada una excitación senoidal de
amplitud constante y de frecuencia variable desde cero hasta infinito. Tal cual se
va a demostrar, la respuesta de un sistema LTI ante este tipo de excitación, es
otra senoidal de la misma frecuencia que la entrada, pero que difiere en amplitud
y fase (ver figura 11.1). Las dos ventajas principales que presentan este método
son: la facilidad experimental de realización y que la FDT en el dominio
frecuencia se obtiene reemplazando la s del dominio complejo de las
Transformadas de Laplace por jω. La nueva función, G (jω), es una función de
variable compleja, cuya representación en módulo y argumento expresará, la
amplificación o atenuación del equipo y el desfase introducido a una determinada
frecuencia.
Para llegar a estas conclusiones se partirá de un sistema LTI al que se le excita
con un armónico y cuya variable independiente es su frecuencia:

Aplicando transformada de Laplace a cada una de las partes de la igualdad será:
La señal de salida será la convolución entre la excitación de entrada y la FDT del
sistema. Al considerar que el equipo es lineal, su función puede ser expresada
por dos polinomios, uno en el numerador N(s) y otro en el denominador D(s);
cumpliendo la condición de existencia física que exige que el grado del
denominador sea mayor o igual al del numerador:
Al ser un sistema LTI, G(s) puede escribirse como un polinomio en el
numerador y otro en el denominador y ambos de coeficientes constantes:
Para calcular la anti transformada se hace descomposición en fracciones
simples, separando la componente del permanente de la parte correspondiente
del transitorio:
Siendo pi las raíces o polos de D(s). Por la propia definición de respuesta en
frecuencia, sólo interesa la respuesta del régimen permanente, esto es, la
solución particular de la ecuación diferencial. En las transformadas de Laplace,
el transitorio depende de los polos del polinomio característico y el régimen
permanente coincide con los polos de la señal de entrada:
Resolviendo el cálculo de los residuos simples:

Introduciendo los residuos en la expresión del régimen permanente de la salida
y sacando factor común a
Al haber sustituido s por jω y ser una expresión en el dominio complejo, se
empleará una representación en módulo y argumento:
Insertando estos resultados quedará:
La señal de salida es otro armónico de igual frecuencia que el de entrada, cuya
amplitud es amplificada o atenuada según el valor de |G(ω)|, y desfasada
respecto de la entrada dependiendo de ϕ(ω). Esta conclusión es sólo válida para
sistemas lineales. Si el sistema hubiese sido no lineal, la salida sería una
combinación de n-armónicos, de frecuencias múltiplos del armónico
fundamental, esto es, cuando el sistema es no lineal se generará una distorsión
armónica. Resumiendo, si el sistema es lineal, la salida es otro armónico de igual
frecuencia que la entrada, en cambio, si el sistema es no lineal, no sólo hay una
componente del igual frecuencia al armónico de entrada o fundamental sino de
armónicos múltiples.

2.- DIAGRAMAS DE BODE
Como se acaba de observar, la respuesta en frecuencia transcurre en el dominio
complejo. Por esta razón, se puede hacer una presentación visual de la
respuesta en dos curvas: módulo y argumento. La primera indica la amplificación
o atenuación del sistema en el espectro de la frecuencia. Mientras el argumento
refleja cuánto adelanta o retrasa la señal de salida respecto a la entrada. A esta
representación gráfica se la llama el diagrama de Bode. Una de las dos curvas
es el módulo respecto a la frecuencia. A esta representación se le llamará el
diagrama de amplitud. En ella las escalas serán logarítmicas, de forma que en el
eje de ordenadas, la amplitud, se encontrará la ganancia en decibelios y en
abscisas, la frecuencia, estará en décadas:
Hay que destacar que trazados por encima de los 0dB significará que el sistema
a esa frecuencia tiene capacidad de amplificación, mientras por debajo indicará
que en esa parte del espectro de la frecuencia, el sistema atenúa, esto es, la
señal de salida es más pequeña, en amplitud, que la entrada. En cuanto al
argumento se refleja en el diagrama de fase, donde el eje de abscisa es igual
que en el módulo, es decir, en décadas y el eje de ordenadas se deposita el
argumento en escala natural. Resumiendo, la variable independiente será la
frecuencia que será expresada en décadas, log10ω. En la curva del módulo de
la FDT, |G(ω)|, será cuantificada en decibelios, 20 log10 |G(ω| [dB]. La
representación del desfase, el argumento, ϕ(ω), será la variable dependiente y

se medirá en escala natural. La ventaja de la representación logarítmica reside
en que los productos se convierten en suma y las divisiones en resta. Luego para
sistemas LTI constituidos como un producto de polos y ceros, su representación
en el diagrama de Bode se convertirá en la suma y resta de componentes
básicos. Más concretamente, la repuesta en frecuencia de un sistema LTI estará
constituida por la sustitución en la FDT de s por jω. Por tanto, se configurará
como la fracción de ceros y polos de primer y segundo orden:
Al ser representado en diagrama de Bode, se convertirá en un sumatorio de
términos básicos:
Tanto para el módulo como para el argumento:
Este trazado permite conseguir una representación de manera sencilla a partir
de la descomposición del sistema en sus términos simples (ganancia estática,
polos y ceros en el origen, polos y ceros de primer y de segundo orden). Un

procedimiento sistemático de representación se basa en la conjugación de los
términos o factores simples que constituye cualquier FDT de tipo LTI.
Diagrama de Bode en términos simples. Los términos o factores básicos de los
sistemas LTI son: 1. Ganancia estática o término invariante en frecuencias.
2. Polos y ceros en el origen, (jωT)±1
3. Polos y ceros de primer orden, (1+jωT)±1
4. Polos y ceros de segundo orden,
3.- MÉTODOS GRÁFICOS
3.1. Diagramas de Bode
La técnica de representación de Bode permite hacer gráficas rápidamente y con
una precisión que es suficiente para el diseño de sistemas de control. La primera
idea es graficar las curvas de magnitud empleando una escala logarítmica y las
curvas de fase empleando una escala lineal. Esto permite graficar plantas cuyas
funciones de transferencia son de alto orden mediante la adición gráfica simple
de los términos separados. Esto es así porque una expresión compleja con
factores de ceros y polos se puede escribir como:
Operando llegamos a la expresión siguiente:
Las ventajas de trabajar con la respuesta en frecuencia en términos de las
gráficas de Bode son:
1. Las gráficas de Bode de sistemas en serie simplemente se suman. 2. La
relación fase-ganancia está en términos de los logaritmos de fase y ganancia.
3. se puede mostrar una variación mucho más amplia del comportamiento del
sistema; esto es. Tanto el comportamiento de alta frecuencia como el de baja
frecuencia se pueden mostrar en una gráfica.
4. El diseño de compensadores se puede basar completamente en gráficas de
Bode.

3.2. Diagrama de Nyquist
Este tipo de representación se realiza colocando la parte real de la función de
transferencia en el eje de abscisas y su parte imaginaria en el eje de ordenadas.
Este diagrama es muy útil a la hora de calcular el margen de ganancia y el
margen de fase, así como para analizar la estabilidad del sistema.
3.3. Diagrama de Black – Nichols
Este tipo de representación se basa en el hecho de colocar sobre un mismo
plano el módulo y la fase de la función de transferencia a partir de sus dos
gráficas separadas. Se usa mucho si los diseños y cálculos se realizan a mano,
pero en la actualidad, debido al uso de ordenadores, este tipo de diagrama está
perdiendo importancia. Aun así veremos algún ejemplo.
3.4. Representaciones en los tres tipos de diagramas
%Ejemplo Bode
Planta=tf ([1 1], [1 2 1])
Contr=2 open=tf (planta*contr)
Close=feedback (open, 1)
Bode (open,'g', close,'r')

Vemos que la realimentación mejora la respuesta en frecuencia del sistema al
aumentar el ancho de banda.
Vemos que al aumentar el orden el diagrama se reduce.
%Ejemplo Nichols
num = [-4 48 -18 250 600];
den = [1 30 282 525 60];
H = tf(num,den)
nichols(H);ngrid

4.- TÉRMINOS INVARIANTES EN FRECUENCIA
Corresponde a elementos que no almacenan energía que carece de inercia, sólo
la transforman de un tipo a otro o la amplifican o la atenúan. Por ejemplo, un
amplificador operacional ideal con estructura de realimentación negativa. Tanto
en su configuración de inversor como de no inversor, la señal de salida es
amplificada o atenuada según el valor de las resistencias R1 y R2.
En general, la representación en módulo y argumento de los sistemas invariantes
con la frecuencia serán del tipo:
Indicando un comportamiento constante en todo el espectro de la frecuencia.

POLOS Y CEROS EN EL ORIGEN
Los polos en el origen corresponden con almacenamientos netos de energía y
están ligadas a las acciones integrales. Sea, por ejemplo, el proceso de carga
de un condensador, en condiciones iniciales nulas, la relación causa-efecto de
la carga se expresa como la integración de la cantidad de carga por unidad de
tiempo que es reflejado por la variación de tensión entre extremos del
condensador:
En el dominio de la frecuencia, este ejemplo, estará relacionado con la
reactancia capacitiva:
En general, la respuesta en frecuencia de un polo en el origen, asociado a un
constante de tiempo T , para el caso de FDT adimensionales será:

El lugar geométrico del módulo es una recta, ya que la variable independiente
está en décadas. La pendiente será de –20[dB/dec] y cuando el módulo sea
unidad, |G(ω)|[dB]=0, cortará al eje de las frecuencias en:
Los polos en el origen tienen el efecto integrador. Se caracteriza por una
ganancia infinita a frecuencias nulas y decrece con la frecuencia. El desfase
introducido es de –90º en todo el espectro de la frecuencia.
Los ceros en el origen son duales a los polos en el origen. Tienen una ganancia
nula a frecuencia cero y crecen con la frecuencia con una pendiente de
+20[dB/dec] tendiendo a infinito. Aquí la causa es un proceso derivativo. Un
ejemplo de este comportamiento es la relación entre la tensión en la bobina y su
corriente:
Los ceros en el origen adimensionales, esto es, con constante de tiempo
asociada, tienen la siguiente respuesta frecuencial:

POLOS Y CEROS DE PRIMER ORDEN.
La respuesta en frecuencia de los polos de primer orden se comportan como
filtros paso bajo. Dejan pasar las componentes de bajas frecuencias y atenúan
las altas. Los cuadripolos RC son fiel reflejo de filtros paso bajos de primer orden.
Nótese la correspondencia entre la respuesta en frecuencia y el concepto de
impedancia, empleado en el análisis de circuitos.
El modelo matemático de un sistema de primer orden básico está constituido por
un polo de primer orden:
Y su respuesta en frecuencia en módulo y argumento para el trazado de Bode
quedará como:

Tanto el módulo como el argumento son dos curvas continuas con la frecuencia,
pero ambas están limitadas por su comportamiento asintótico. Véase qué sucede
en la baja y en la alta frecuencia: Cuando ω→0 → ωT<< 1, entonces:
Para valores intermedios de la frecuencia, la amplitud y la fase se obtendrán
directamente de las ecuaciones (11. 25). No obstante, suele ser suficiente con
una representación asintótica.
La mayor discrepancia que hay entre la respuesta real y la asintótica se da en
la frecuencia del polo:
Los ceros de primer orden son términos que dejan pasar la baja frecuencia y
amplifica el aspecto de alta frecuencia. No existe implementación física de sólo
un cero de primer orden, rompe el principio de causalidad:
Al igual que los polos de primer orden, la representación de los ceros en Bode
corresponde a curvas continuas con la frecuencia. Sin embargo, en el trazado
manual, generalmente, la respuesta asintótica es suficiente. Las asíntotas a baja
frecuencia, ω zT << 1, valen:
Igual que los polos de primer orden. La diferencia está en frecuencias superiores
a la del cero, ω zT >> 1:
Obviamente, la mayor discrepancia entre la respuesta asintótica y la real está en
la frecuencia del cero. Se deja al lector que obtenga similares conclusiones a lo
indicado en los polos de primero orden. En la figura adjunta se muestra el trazado
de Bode de un cero de primer orden.
POLOS Y CEROS DE SEGUNDO ORDEN
Un polo de segundo orden tiene una respuesta frecuencial de un filtro paso bajo
de segundo orden. Está caracterizado por la frecuencia natural, ωn, y el factor
de amortiguamiento, ξ
Ejemplo 11.1
Obtener la respuesta frecuencial del siguiente cuadripolo:
Es un divisor de tensión en el que se puede emplear el concepto de impedancia.
Nótese que la impedancia está unida a la respuesta en frecuencias. Así es, la
definición de impedancia se liga a la relación entre tensión y corriente ante la

excitación de un armónico de frecuencia variable al que es sometido un elemento
eléctrico pasivo.
La frecuencia natural, ωn, y el factor de amortiguamiento, ξ, se conseguirá por
asociación de coeficientes de la ec. (11. 39).
También debe observarse que el sistema tiene una ecuación diferencial del
segundo orden porque hay dos elementos de almacenamiento de energía. Si el
valor de la resistencia es de 330 ohmios, el condensador de 10 nF y la bobina
es de 100 mH, el diagrama de Bode queda como:

El módulo y argumento de la respuesta frecuencial de un polo de segundo orden
serán dos curvas continuas dependientes de la frecuencia. Aplicando las
definiciones de módulo y argumento sobre la ec.(11. 39), las expresiones en
decibelios y en escala natural respectivamente quedan como:
Estas dos funciones continuas de la frecuencia, cada una de ellas, estarán
limitadas por dos asíntotas respectivamente. Una a la baja frecuencia, cuando la
frecuencia sea mucho más pequeña a la frecuencia natural, ω<>ωn:
a) Baja frecuencia, ω<
b) Alta frecuencia, ω>>ωn:
La mayor discrepancia entre la respuesta real y la asintótica se da para cuando
la frecuencia coincide con la frecuencia natural:
c) ω=ωn

La respuesta en frecuencia de un sistema de segundo orden estará
parametrizada, para un valor de frecuencia natural dada, en función de ξ.
Las asíntotas son independiente del valor del factor de amortiguamiento, ξ.
Para valores de ξ menores a 0.7 aparece un pico de resonancia, cuya
amplitud se puede demostrar que vale:
Cuyo valor se denomina pico de resonancia, Mr . Este valor máximo se da en la
frecuencia de resonancia, definida por:

Para valores de ξ mayores de 0.707 no hay pico de resonancia. En la práctica,
los picos de resonancia indican una amplificación de la señal de salida que puede
provocar su destrucción. Muchas veces se diseñan filtros rechazo de banda
alrededor de la frecuencia de resonancia del sistema, para evitar su
desestabilización.
CONCLUSION
Al realizar esta investigación el objetivo fue estudiar todo lo referente a la
respuesta en frecuencia con el fin de adquirir amplios conocimientos de los
sistemas de control.
En la práctica raras veces los sistemas de control están sometidos a señales
sinusoidales, pero la información que se obtiene por el análisis sinusoidal se
puede usar para establecer la naturaleza de la respuesta a una gran variedad de
señales. Además el análisis es conveniente para el manejo analítico y
experimental.
Los diagramas de Bode son una forma de representar la respuesta en frecuencia
de un sistema de control en coordenadas rectangulares, este consiste de dos
gráficos:
1. Diagrama de amplitud o atenuación: en donde se grafica la relación de
amplitud M G(jω) en decibelios (db) contra el logaritmo de la frecuencia.
2. Diagrama de fase: en donde se grafica el ángulo de fase de G(jω) contra
el logaritmo de la frecuencia.