SIECI NEURONOWE RADIALNE W ESTYMACJI ZMIENNYCH … · struktura regulacji pr ędko ści silnika pr...
19
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wroclawskiej Nr 60 Studia i Materialy Nr 27 2007 Sieci neuronowe radialne, estymatory neuronowe, uklad dwumasowy Marcin KAMIŃSKI * , Teresa ORLOWSKA-KOWALSKA * SIECI NEURONOWE RADIALNE W ESTYMACJI ZMIENNYCH STANU NIELINIOWEGO UKLADU DWUMASOWEGO W artykule zaprezentowano zastosowanie sieci neuronowych typu RBF (Radial Basis Function) jako estymatorów zmiennych stanu ukladu napędowego z polączeniem sprężystym. Model napędu zastosowany w badaniach zostal rozszerzony o elementy nieliniowe uwzględniające zjawisko tarcia oraz luzu na wale lączącym silnik z maszyną roboczą. Przedstawione zostaly poszczególne etapy projektowania neuronowych estymatorów zmiennych stanu badanego ukladu napędowego. Informacje uzyskiwane za pomocą sieci neuronowych wykorzystywane są w rozszerzonej strukturze sterowania napędem dwumasowym z polączeniem sprężystym. Przeprowadzone badania obejmują testowanie dokladności odtwarzania momentu skrętnego oraz prędkości obciążenia napędu, w szerokim zakresie zmian prędkości zadanej ukladu i momentu obciążenia. Wykonano badania przedstawiające wplyw liczby neuronów w warstwie ukrytej oraz zastosowanej funkcji radialnej na dokladność estymacji wybranych zmiennych stanu. Przedstawiono oddzialywanie zmian mechanicznej stalej czasowej obciążenia na jakość odtwarzania prezentowanych estymatorów. 1. WSTĘP W ciągu ostatnich lat obserwowany jest wzrost zastosowań sieci neuronowych w wielu dziedzinach nauki wynikający przede wszystkim z bardzo dobrych zdolności do aproksymacji danych oraz możliwości skutecznego treningu sieci do realizacji zlożonych zadań. Wzrost praktycznych implementacji sieci neuronowych jest związany z intensywnym rozwojem energoelektroniki oraz technik mikroprocesorowych. Wlaściwości sieci neuronowych predysponują je do zastosowań w ukladach sterowania napędem elektrycznym, m.in. do estymacji zmiennych stanu. W pracach [2], [6] przedstawiono możliwości estymacji mechanicznych zmiennych stanu napędu dwumasowego przy wykorzystaniu perceptronowych sieci __________ * Politechnika Wroclawska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wroclaw, ul. Smoluchowskiego 19, [email protected], [email protected]
Transcript of SIECI NEURONOWE RADIALNE W ESTYMACJI ZMIENNYCH … · struktura regulacji pr ędko ści silnika pr...
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60
Studia i Materiały Nr 27 2007
Sieci neuronowe radialne,
estymatory neuronowe, układ dwumasowy
Marcin KAMIŃSKI*, Teresa ORŁOWSKA-KOWALSKA*
SIECI NEURONOWE RADIALNE W ESTYMACJI ZMIENNYCH
STANU NIELINIOWEGO UKŁADU DWUMASOWEGO
W artykule zaprezentowano zastosowanie sieci neuronowych typu RBF (Radial Basis Function) jako estymatorów zmiennych stanu układu napędowego z połączeniem sprężystym. Model napędu zastosowany w badaniach został rozszerzony o elementy nieliniowe uwzględniające zjawisko tarcia oraz luzu na wale łączącym silnik z maszyną roboczą. Przedstawione zostały poszczególne etapy projektowania neuronowych estymatorów zmiennych stanu badanego układu napędowego. Informacje uzyskiwane za pomocą sieci neuronowych wykorzystywane są w rozszerzonej strukturze sterowania napędem dwumasowym z połączeniem sprężystym. Przeprowadzone badania obejmują testowanie dokładności odtwarzania momentu skrętnego oraz prędkości obciążenia napędu, w szerokim zakresie zmian prędkości zadanej układu i momentu obciążenia. Wykonano badania przedstawiające wpływ liczby neuronów w warstwie ukrytej oraz zastosowanej funkcji radialnej na dokładność estymacji wybranych zmiennych stanu. Przedstawiono oddziaływanie zmian mechanicznej stałej czasowej obciążenia na jakość odtwarzania prezentowanych estymatorów.
1. WSTĘP
W ciągu ostatnich lat obserwowany jest wzrost zastosowań sieci neuronowych w wielu dziedzinach nauki wynikający przede wszystkim z bardzo dobrych zdolności do aproksymacji danych oraz możliwości skutecznego treningu sieci do realizacji złożonych zadań. Wzrost praktycznych implementacji sieci neuronowych jest związany z intensywnym rozwojem energoelektroniki oraz technik mikroprocesorowych. Właściwości sieci neuronowych predysponują je do zastosowań w układach sterowania napędem elektrycznym, m.in. do estymacji zmiennych stanu. W pracach [2], [6] przedstawiono możliwości estymacji mechanicznych zmiennych stanu napędu dwumasowego przy wykorzystaniu perceptronowych sieci
__________ * Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław,
ul. Smoluchowskiego 19, [email protected], [email protected]

neuronowych MLP (Multi Layer Perceptron). Zaletą stosowania estymatorów neuronowych, w przeciwieństwie do układów algorytmicznych, jest brak konieczności posiadania informacji o modelu obiektu oraz jego parametrów. Uzyskiwane za pomocą sieci neuronowych przebiegi zmiennych stanu wykorzystywane są w układach sterowania napędem dwumasowym. W układach tych istotne jest uwzględnienie skończonej sztywności wału łączącego, która w większości przypadków może prowadzić do oscylacji elektromagnetycznych zmiennych stanu, a tym samym utrudniać sterowanie układem napędowym lub w szczególnych przypadkach prowadzić do utraty stabilności systemu. Precyzyjne sterowanie napędu elektrycznego z połączeniem sprężystym zapewnione jest poprzez zastosowanie układów wykorzystujących dodatkowe sprzężenia zwrotne od wybranych zmiennych stanu.
W niniejszym artykule przedstawiono zastosowanie sieci neuronowych RBF, jako alternatywy dla sieci MLP, w zadaniu estymacji prędkości maszyny obciążającej oraz momentu skrętnego napędu dwumasowego.
2. MODEL MATEMATYCZNY OBIEKTU BADAŃ I UKŁADU STEROWANIA
Obiektem badań jest układ napędowy złożony z dwóch mas, reprezentujących silnik napędowy oraz maszynę obciążającą, połączonych za pomocą elastycznego wału. Mała wartość momentu bezwładności połączenia sprężystego Jc w stosunku do mas silnika J1 oraz obciążenia J2 umożliwia pominięcie tej wielkości w rozważaniach. Przyjęta została zerowa wartość współczynnika tłumienia wewnętrznego d, w związku z tym zwiększony został wpływ sprężystości wału łączącego na działanie badanej struktury.
Po uwzględnieniu powyższych założeń część mechaniczna analizowanej struktury układu dwumasowego może być opisana następującym układem równań:
))()(()(
)()()()(
)()()()(
21
22
2
11
1
ttdt
tdmT
tmtmtmdt
tdT
tmtmtmdt
tdT
s
c
fLs
fse
ωω
ω
ω
−Ν=
−−=
−−=
(1)-(3)
gdzie: ω1 - prędkość silnika napędowego, ω2 - prędkość obciążenia, ms - moment skrętny, mL - moment obciążenia, mf1 - moment tarcia silnika napędowego, mf2 - moment tarcia maszyny obciążającej, N - funkcja opisująca zjawisko luzu, T1 - mechaniczna stała czasowa silnika napędowego, T2 - mechaniczna stała czasowa
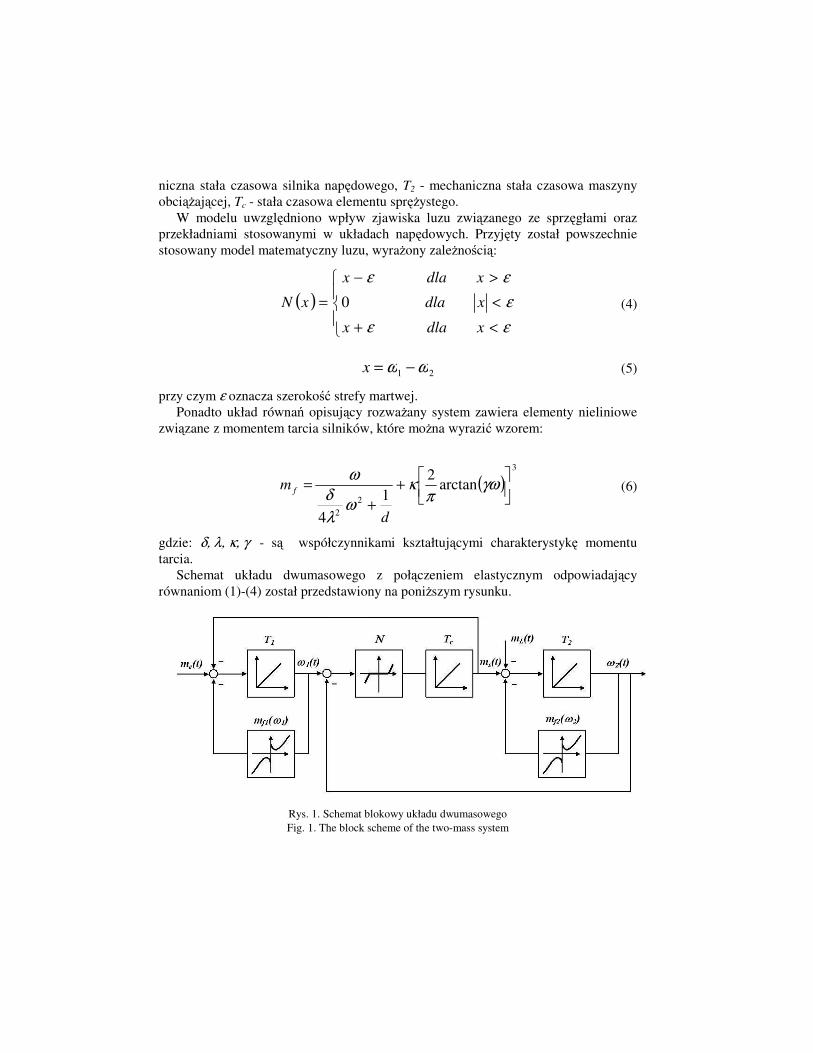
niczna stała czasowa silnika napędowego, T2 - mechaniczna stała czasowa maszyny obciążającej, Tc - stała czasowa elementu sprężystego.
W modelu uwzględniono wpływ zjawiska luzu związanego ze sprzęgłami oraz przekładniami stosowanymi w układach napędowych. Przyjęty został powszechnie stosowany model matematyczny luzu, wyrażony zależnością:
( )
<+
<
>−
=
εε
ε
εε
xdlax
xdla
xdlax
xN 0 (4)
21 ωω −=x (5)
przy czym ε oznacza szerokość strefy martwej. Ponadto układ równań opisujący rozważany system zawiera elementy nieliniowe
związane z momentem tarcia silników, które można wyrazić wzorem:
( )3
2
2
arctan2
1
4
+
+
= γωπ
κ
ωλ
δ
ω
d
m f (6)
gdzie: δ, λ, κ, γ - są współczynnikami kształtującymi charakterystykę momentu tarcia.
Schemat układu dwumasowego z połączeniem elastycznym odpowiadający równaniom (1)-(4) został przedstawiony na poniższym rysunku.
Rys. 1. Schemat blokowy układu dwumasowego Fig. 1. The block scheme of the two-mass system
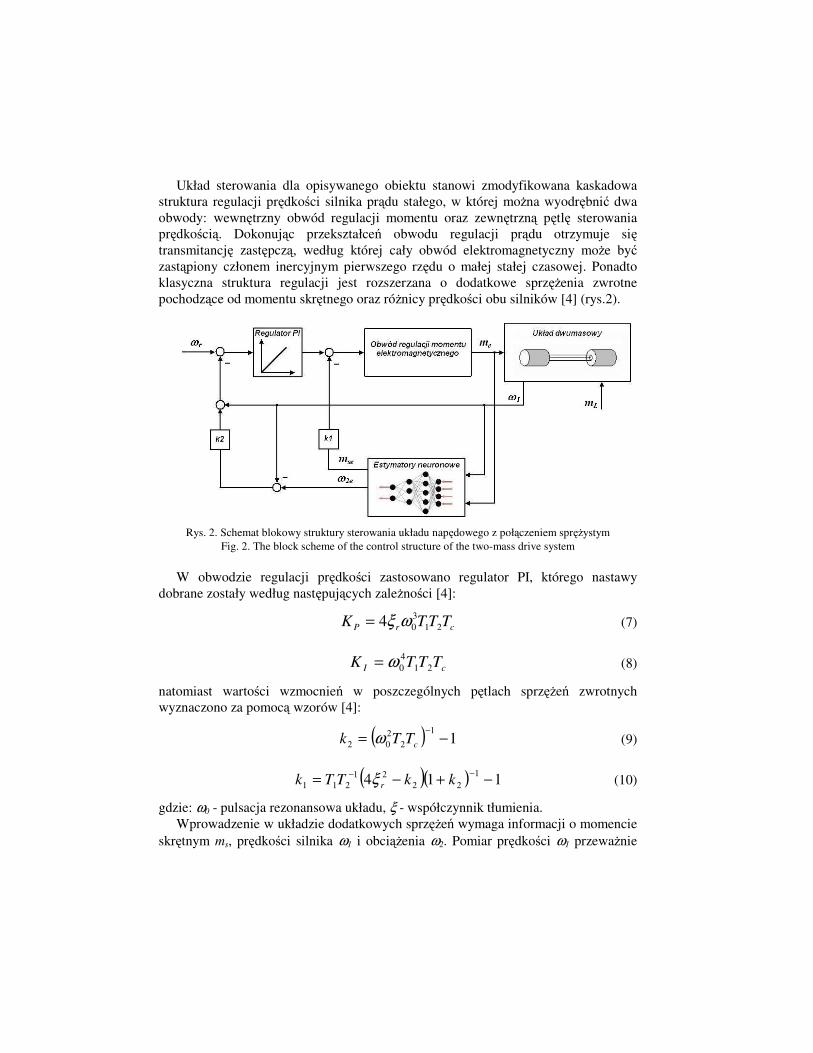
Układ sterowania dla opisywanego obiektu stanowi zmodyfikowana kaskadowa struktura regulacji prędkości silnika prądu stałego, w której można wyodrębnić dwa obwody: wewnętrzny obwód regulacji momentu oraz zewnętrzną pętlę sterowania prędkością. Dokonując przekształceń obwodu regulacji prądu otrzymuje się transmitancję zastępczą, według której cały obwód elektromagnetyczny może być zastąpiony członem inercyjnym pierwszego rzędu o małej stałej czasowej. Ponadto klasyczna struktura regulacji jest rozszerzana o dodatkowe sprzężenia zwrotne pochodzące od momentu skrętnego oraz różnicy prędkości obu silników [4] (rys.2).
Rys. 2. Schemat blokowy struktury sterowania układu napędowego z połączeniem sprężystym
Fig. 2. The block scheme of the control structure of the two-mass drive system W obwodzie regulacji prędkości zastosowano regulator PI, którego nastawy
dobrane zostały według następujących zależności [4]:
crP TTTK 21304 ωξ= (7)
cI TTTK 2140ω= (8)
natomiast wartości wzmocnień w poszczególnych pętlach sprzężeń zwrotnych wyznaczono za pomocą wzorów [4]:
( ) 11
2202 −=
−
cTTk ω (9)
( )( ) 114 122
21211 −+−=
−−kkTTk rξ (10)
gdzie: ω0 - pulsacja rezonansowa układu, ξ - współczynnik tłumienia. Wprowadzenie w układzie dodatkowych sprzężeń wymaga informacji o momencie
skrętnym ms, prędkości silnika ω1 i obciążenia ω2. Pomiar prędkości ω1 przeważnie

jest uzyskiwany za pomocą wyspecjalizowanych urządzeń np. enkoderów, jednak przebiegi momentu skrętnego lub prędkości ω2 często są trudnodostępne lub ich obserwacja jest związana ze znacznym zwiększeniem kosztów realizacji układu. W takich przypadkach zastosowanie znajdują specjalne układy estymujące, np. estymatory neuronowe.
3. SIECI NEURONOWE TYPU RBF
Sieci neuronowe radialne (Radial Basis Function) stanowią specjalną grupę sieci neuronowych o charakterystycznej topologii oraz budowie poszczególnych neuronów w warstwie ukrytej. Sieci RBF mają strukturę typu feedforward, zatem istnieje w nich jeden ustalony kierunek przepływu danych pomiędzy poszczególnymi warstwami sieci neuronowej. Opisywana sieć składa się z trzech warstw: pierwszą z nich jest warstwa wejściowa, w której formowany jest wektor wejściowy neuronów kolejnej warstwy; następną – warstwa ukryta, którą tworzą neurony o radialnej funkcji aktywacji; warstwa wyjściowa składa się z neuronów liniowych, których liczba jest uzależniona od liczby parametrów wyjściowych sieci (rys. 3).
Rys. 3. Struktura radialnej sieci neuronowej
Fig. 3. Structure of the Radial Basis Function Jako funkcja aktywacji neuronów w warstwie ukrytej często stosowana jest
funkcja Gaussa, opisana poniższym wzorem:
)2
exp()(2
2
j
j
jj hhσ
υυ −== (11)

gdzie: σj jest parametrem określającym szerokość funkcji radialnej, νj odpowiada odległości pomiędzy wektorem wejściowym oraz centrum neuronu. Najczęściej odległość ta jest wyrażona poprzez normę Euklidesową, wyznaczaną następująco:
nicxn
i
jiijj ...3,2,1,)()(1
2 =−=−= ∑=
CXXυ (12)
gdzie: X=[x1,x2,x3....xn]T jest wektorem wejściowym, Cj – wektor odpowiadający
centrum danego neuronu. Analizując powyższe równania można zauważyć, że wartość wyjściowa danego
neuronu radialnego wzrasta ze zbliżaniem się kolejnych próbek wejściowych do centrum funkcji radialnej. Wartości wyjściowe sieci obliczane są jako suma sygnałów wyjściowych kolejnych neuronów radialnych przemnożonych przez odpowiednie współczynniki wagowe:
∑=
+=n
j
kjjkk bhwy1
(13)
gdzie yk – jest wyjściem k-tego neuronu wyjściowego, wjk – jest współczynnikiem wagowym pomiędzy wyjściem j-tego neuronu warstwy ukrytej a k-tym neuronem wyj-ściowym, bk – wartość współczynnika progowego k-tego neuronu wyjściowego (bias) [7].
Wielowarstwowe sieci neuronowe, określane w literaturze również jako perceptrony wielowarstwowe MLP, realizują funkcję aproksymacji globalnej. O odwzorowaniu każdego elementu wektora wejściowego decyduje w tym przypadku jednocześnie wiele neuronów. Natomiast w przypadku zastosowania sieci RBF za realizację odwzorowania każdego klastra przestrzeni odpowiada poszczególny neuron warstwy ukrytej sieci. Powyższe podejście odpowiada aproksymacji lokalnej. Odwzorowanie całego zbioru danych uzyskuje się poprzez operację superpozycji dla sygnałów wyjściowych poszczególnych neuronów ukrytych. Jest ona realizowana za pomocą liniowego neuronu wyjściowego.
Proces uczenia radialnej sieci neuronowej znacznie różni się od treningu sieci MLP. Jest to związane z odmienną budową obu typów sieci neuronowych. Procedura trenowania sieci RBF składa się z trzech etapów obejmujących kolejno wyznaczanie: centrów neuronów ukrytych, parametrów odpowiadających szerokości funkcji radialnych poszczególnych neuronów ukrytych, współczynników wagowych pomiędzy warstwą ukrytą a wyjściową. W celu rozmieszczenia centrów funkcji radialnych zwykle stosowana jest metoda K-średnich. W algorytmie tym przestrzeń jest dzielona na obszary, do których następnie klasyfikowane są poszczególne grupy danych. Każdy obszar przestrzeni jest charakteryzowany przez punkt centralny, wyznaczany jako średnia wartość wszystkich elementów rozpatrywanego obszaru. Centrum danego obszaru odpowiada centrum kolejnej funkcji radialnej. W związku z

obszaru odpowiada centrum kolejnej funkcji radialnej. W związku z tym liczba rozpatrywanych obszarów jest równa liczbie neuronów w warstwie ukrytej.
Kolejnym istotnym etapem uczenia sieci RBF jest wyznaczenie parametrów σ określających kształt funkcji radialnych neuronów ukrytych. Jeśli wartość parametru σ jest zmniejszana, to zwiększa się szerokość funkcji radialnej (rys. 4). W takim przypadku spada dokładność przetwarzania danych przez sieć. Wraz ze wzrostem współczynnika σ funkcja obejmuje mniejszy obszar, zwiększa się dokładność generalizacji danych, wrażliwość na zmiany sygnałów wejściowych. Jednak konsekwencją zwiększania wartości σ może być w praktycznych rozwiązaniach generowanie zakłóceń przez sieć, przenoszenie na wyjście szumów pomiarowych. Wartość parametru σ może być dobierana empirycznie, określana na podstawie odległości euklidesowej pomiędzy centrum rozpatrywanej oraz sąsiedniej funkcji lub kilku sąsiednich funkcji.
Rys. 4. Wpływ parametru σ na kształt funkcji Gaussa (11) Fig. 4. Influence of the parameter σ on the shape of the Gaussian function (11)
Następnie wyznaczane są wartości wag pomiędzy warstwą ukrytą a wyjściową.
Przekształcenia realizowane w końcowym etapie przetwarzania danych w sieci można opisać równaniem:
dwG = (14)
gdzie d=[d1,d2,d3...dn]T – wektor wartości zadanych, w=[w0,w1,w2...wn]
T - wektor współczynników wagowych, natomiast G jest macierzą Greena o postaci (15):
−−−
−−−
−−−
=
nppp
n
n
cxcxcx
cxcxcx
cxcxcx
(((1
(((1
(((1
21
22212
12111
ϕϕϕ
ϕϕϕ
ϕϕϕ
L
LLLLL
L
L
G . (15)
Z równania (14) wynika zależność pozwalająca na uzyskanie wektora wartości współczynników wagowych:
dGw*= (16)
przy czym:
TTGGGG
* 1)( −= , (17)
co oznacza pseudoinwersję macierzy Greena związaną z tym, że jest ona prostokątna [8]. Specyficzna budowa oraz sposób przetwarzania sygnałów umożliwia odtwarzanie za
pomocą sieci RBF dowolnej nieliniowej funkcji za pomocą jednej warstwy ukrytej. Jednak jest to związane z koniecznością zastosowania większej liczby neuronów niż w przypadku sieci MLP.
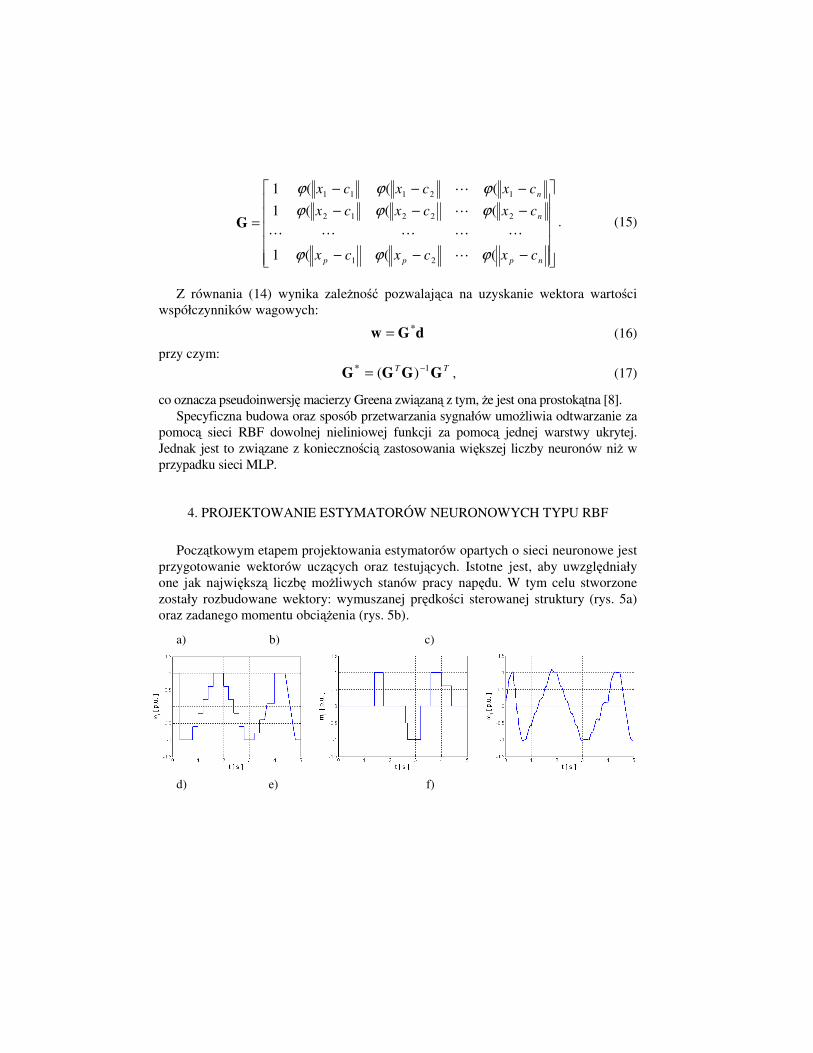
4. PROJEKTOWANIE ESTYMATORÓW NEURONOWYCH TYPU RBF
Początkowym etapem projektowania estymatorów opartych o sieci neuronowe jest przygotowanie wektorów uczących oraz testujących. Istotne jest, aby uwzględniały one jak największą liczbę możliwych stanów pracy napędu. W tym celu stworzone zostały rozbudowane wektory: wymuszanej prędkości sterowanej struktury (rys. 5a) oraz zadanego momentu obciążenia (rys. 5b).
a) b) c)
d) e) f)
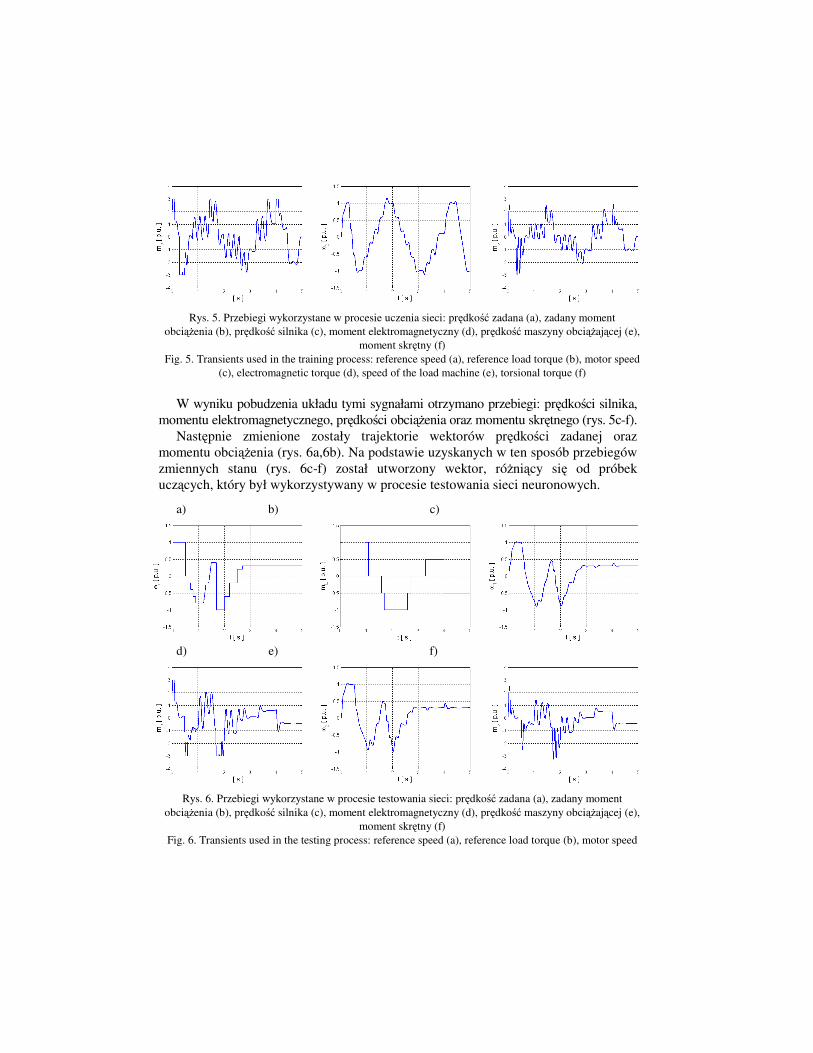
Rys. 5. Przebiegi wykorzystane w procesie uczenia sieci: prędkość zadana (a), zadany moment
obciążenia (b), prędkość silnika (c), moment elektromagnetyczny (d), prędkość maszyny obciążającej (e), moment skrętny (f)
Fig. 5. Transients used in the training process: reference speed (a), reference load torque (b), motor speed (c), electromagnetic torque (d), speed of the load machine (e), torsional torque (f)
W wyniku pobudzenia układu tymi sygnałami otrzymano przebiegi: prędkości silnika,
momentu elektromagnetycznego, prędkości obciążenia oraz momentu skrętnego (rys. 5c-f). Następnie zmienione zostały trajektorie wektorów prędkości zadanej oraz
momentu obciążenia (rys. 6a,6b). Na podstawie uzyskanych w ten sposób przebiegów zmiennych stanu (rys. 6c-f) został utworzony wektor, różniący się od próbek uczących, który był wykorzystywany w procesie testowania sieci neuronowych.
a) b) c)
d) e) f)
Rys. 6. Przebiegi wykorzystane w procesie testowania sieci: prędkość zadana (a), zadany moment
obciążenia (b), prędkość silnika (c), moment elektromagnetyczny (d), prędkość maszyny obciążającej (e), moment skrętny (f)
Fig. 6. Transients used in the testing process: reference speed (a), reference load torque (b), motor speed
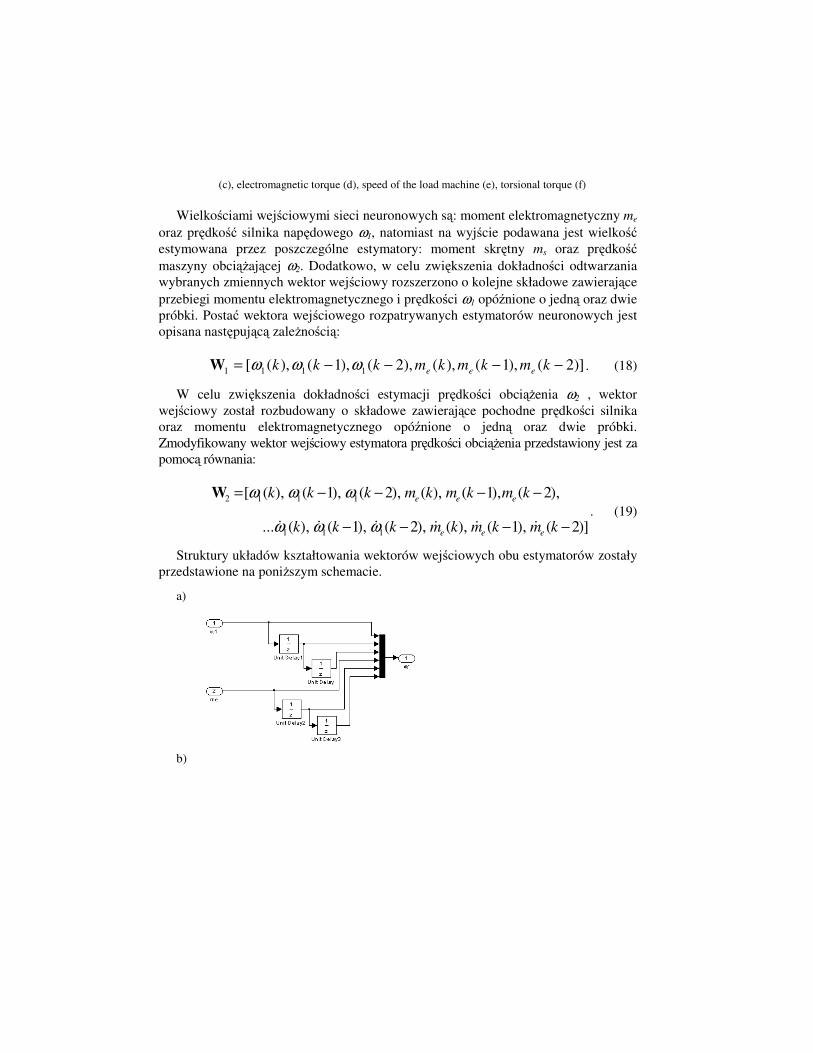
(c), electromagnetic torque (d), speed of the load machine (e), torsional torque (f) Wielkościami wejściowymi sieci neuronowych są: moment elektromagnetyczny me
oraz prędkość silnika napędowego ω1, natomiast na wyjście podawana jest wielkość estymowana przez poszczególne estymatory: moment skrętny ms oraz prędkość maszyny obciążającej ω2. Dodatkowo, w celu zwiększenia dokładności odtwarzania wybranych zmiennych wektor wejściowy rozszerzono o kolejne składowe zawierające przebiegi momentu elektromagnetycznego i prędkości ω1 opóźnione o jedną oraz dwie próbki. Postać wektora wejściowego rozpatrywanych estymatorów neuronowych jest opisana następującą zależnością:
)]2(),1(),(),2(),1(),([ 1111 −−−−= kmkmkmkkk eeeωωωW . (18)
W celu zwiększenia dokładności estymacji prędkości obciążenia ω2 , wektor wejściowy został rozbudowany o składowe zawierające pochodne prędkości silnika oraz momentu elektromagnetycznego opóźnione o jedną oraz dwie próbki. Zmodyfikowany wektor wejściowy estymatora prędkości obciążenia przedstawiony jest za pomocą równania:
])2(),1(),(),2(),1(),(...
),2(),1(),(),2(),1(),([
111
1112
−−−−
−−−−=
kmkmkmkkk
kmkmkmkkk
eee
eee
&&&&&& ωωω
ωωωW
. (19)
Struktury układów kształtowania wektorów wejściowych obu estymatorów zostały przedstawione na poniższym schemacie.
a)
b)
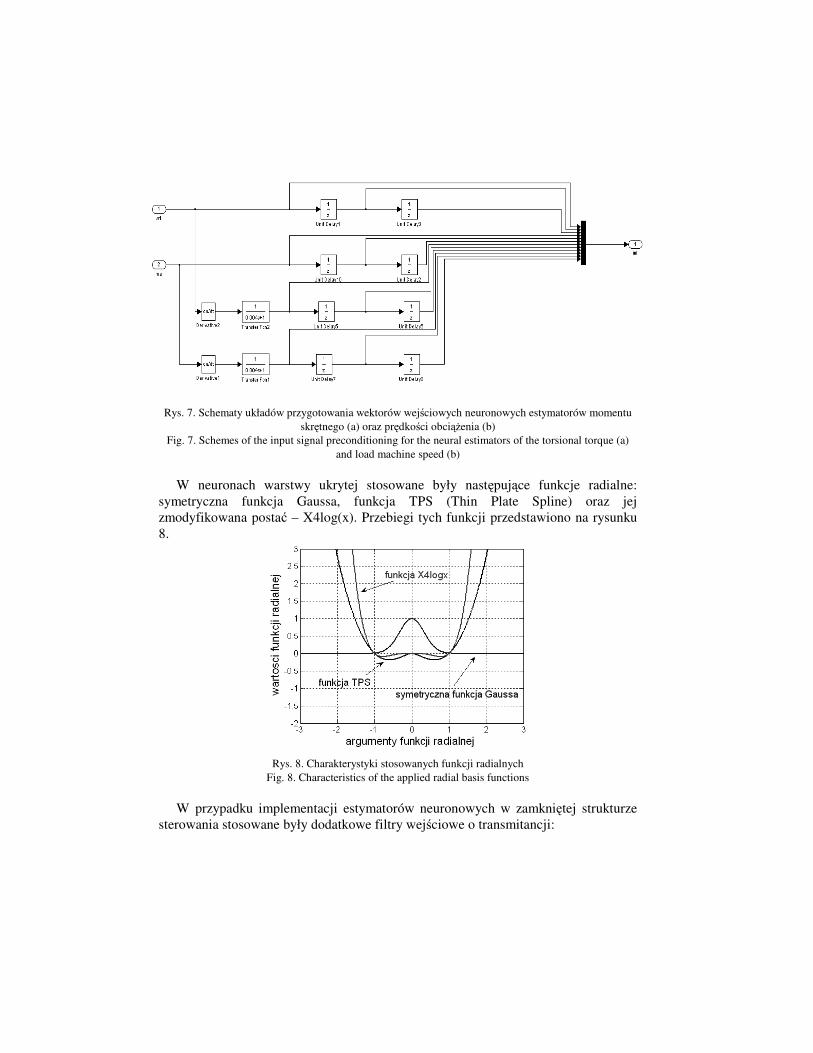
Rys. 7. Schematy układów przygotowania wektorów wejściowych neuronowych estymatorów momentu
skrętnego (a) oraz prędkości obciążenia (b) Fig. 7. Schemes of the input signal preconditioning for the neural estimators of the torsional torque (a)
and load machine speed (b) W neuronach warstwy ukrytej stosowane były następujące funkcje radialne:
symetryczna funkcja Gaussa, funkcja TPS (Thin Plate Spline) oraz jej zmodyfikowana postać – X4log(x). Przebiegi tych funkcji przedstawiono na rysunku 8.
Rys. 8. Charakterystyki stosowanych funkcji radialnych
Fig. 8. Characteristics of the applied radial basis functions W przypadku implementacji estymatorów neuronowych w zamkniętej strukturze
sterowania stosowane były dodatkowe filtry wejściowe o transmitancji:
1001,0
1)(
+=
ssG (20)
w celu zmniejszenia wpływu szumów pomiarowych oraz zakłóceń wynikających z dużej dynamiki sygnałów wejściowych.
Podobnie jak w przypadku klasycznych wielowarstwowych sieci neuronowych MLP z neuronami sigmoidalnymi w warstwach ukrytych, na jakość estymacji ma wpływ liczba zastosowanych neuronów ukrytych. Jeżeli sieć jest zbyt rozbudowana, nie pozwala na uzyskanie zadowalającego poziomu działania estymatora. Natomiast w przypadku kiedy struktura jest za mała, sieć nie jest w stanie nauczyć się realizacji danego zadania [6]. W prezentowanych estymatorach liczba neuronów w warstwie ukrytej została dobrana doświadczalnie. W dalszej części pracy zaprezentowano wyniki badań przedstawiające wpływ liczby neuronów ukrytych na dokładność estymacji momentu skrętnego oraz prędkości maszyny obciążającej.
5. WYNIKI BADAŃ SYMULACYJNYCH
Badaniom symulacyjnym poddano układ dwumasowy z dodatkowymi sprzężeniami zwrotnymi od różnicy prędkości obu maszyn oraz momentu skrętnego. Przebiegi zmiennych stanu wymaganych w tej strukturze sterowania odtwarzane były za pomocą estymatorów neuronowych z sieciami RBF. Symulacje zostały przeprowadzone w środowisku Matlab Simulink, radialne sieci neuronowe generowane i trenowane były za pomocą pakietu Netlab.
Przyjęte zostały następujące wartości stałych czasowych napędu: T1 = T2 = 203ms oraz Tc = 2,6ms. Wprowadzone zostały ograniczenia momentu elektromagnetycznego silnika napędzającego mechanizm. Modelowany moment tarcia został uproszczony – uwzględniono w nim moment tarcia wiskotycznego oraz tarcia Coulomba. Założono również, że momenty tarcia obu maszyn (napędowej i obciążającej) są identyczne (mf1 = mf2). W przeprowadzonych badaniach przyjęto wartość pulsacji rezonansowej układu ω0 = 40s-1 oraz współczynnika tłumienia ξ = 0,7.
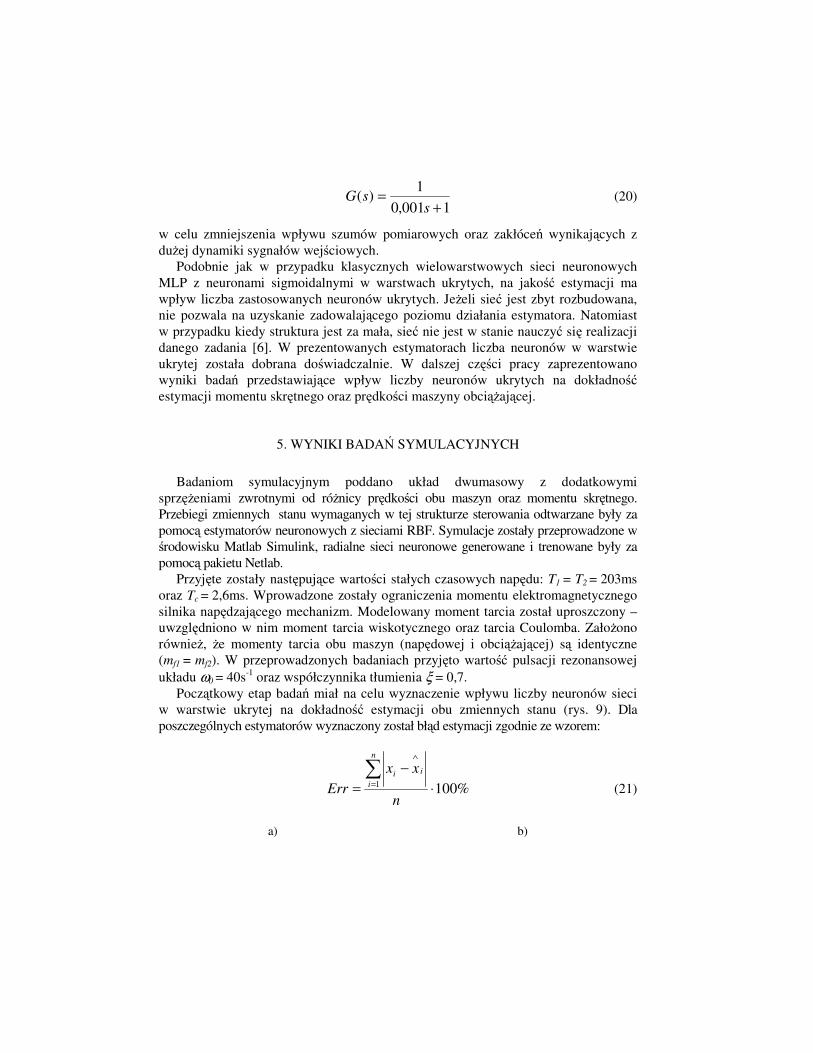
Początkowy etap badań miał na celu wyznaczenie wpływu liczby neuronów sieci w warstwie ukrytej na dokładność estymacji obu zmiennych stanu (rys. 9). Dla poszczególnych estymatorów wyznaczony został błąd estymacji zgodnie ze wzorem:
%1001 ⋅
−
=∑
=
∧
n
xx
Err
n
i
ii
(21)
a) b)
Rys. 9. Diagramy przedstawiające wpływ liczby neuronów ukrytych na błąd estymacji prędkości ω2 (a) oraz momentu skrętnego ms (b)
Fig. 9 . Diagrams illustrating the influence of the hidden neurons number to the load machine speed ω2
(a) and the torsional torque (b) estimation errors
Najlepsze rezultaty uzyskano dla sieci o 40 neuronach w warstwie ukrytej w przypadku estymatora prędkości ω2 oraz przy 70 neuronach dla sieci estymującej moment skrętny mc. Istotna jest jednak przede wszystkim tendencja zmian dokładności odtwarzania w wyniku zmian topologii sieci neuronowej. Wzrost liczby neuronów ukrytych powodował zmniejszanie błędu estymacji poszczególnych zmiennych. Jednak po przekroczeniu pewnego progu wartość błędu odtwarzania wzrastała. W związku z tym można stwierdzić, że zbyt rozbudowana sieć nie pozwala na uzyskanie zadowalającego działania estymatora. Natomiast w przypadku kiedy struktura jest zbyt mała, sieć nie jest w stanie nauczyć się realizacji danego zadania.
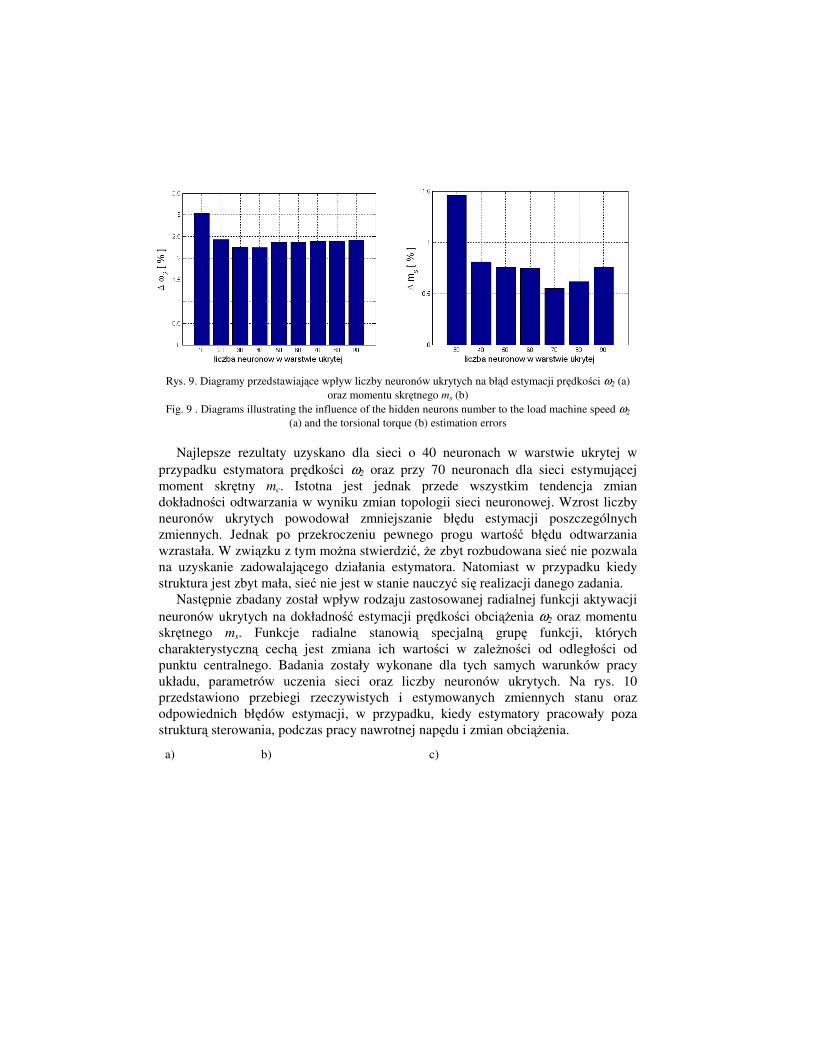
Następnie zbadany został wpływ rodzaju zastosowanej radialnej funkcji aktywacji neuronów ukrytych na dokładność estymacji prędkości obciążenia ω2 oraz momentu skrętnego ms. Funkcje radialne stanowią specjalną grupę funkcji, których charakterystyczną cechą jest zmiana ich wartości w zależności od odległości od punktu centralnego. Badania zostały wykonane dla tych samych warunków pracy układu, parametrów uczenia sieci oraz liczby neuronów ukrytych. Na rys. 10 przedstawiono przebiegi rzeczywistych i estymowanych zmiennych stanu oraz odpowiednich błędów estymacji, w przypadku, kiedy estymatory pracowały poza strukturą sterowania, podczas pracy nawrotnej napędu i zmian obciążenia.
a) b) c)
d) e) f)
Rys. 10. Przebiegi rzeczywiste, estymowane oraz różnica wartości chwilowych prędkości ω2 (a,b,c) oraz momentu skrętnego ms (d,e,f) z zastosowaniem funkcji Gaussa (a,d), funkcji TPS (b,e) oraz X4logx (c,f)
Fig. 10. Transients of the real and estimated variables and their differences for the speed ω2 (a,b,c) and the torsional torque ms (d,e,f) with the application of the Gaussian function (a,d), function TPS (b,e) and
X4logx (c,f) Natomiast na rys. 11 zilustrowano błędy estymacji poszczególnych zmiennych
stanu w zależności od rodzaju zastosowanej funkcji radialnej, wyznaczone według (21). Największą dokładność estymacji uzyskano po zastosowaniu funkcji Gaussa w neuronach warstwy ukrytej; znacznie gorsze rezultaty otrzymano po zastosowaniu pozostałych funkcji aktywacji neuronów ukrytych (szczególnie w przypadku estymatora momentu skrętnego). Błędy odtwarzania za pomocą estymatorów wykorzystujących funkcję Gaussa wynoszą odpowiednio: w przypadku prędkości obciążenia – 2.27%, natomiast w przypadku estymacji momentu skrętnego 0.56%. Powyższe rezultaty estymacji uzyskano dla wektora wejściowego estymatorów W1 opisanego wzorem (18).
a) b)
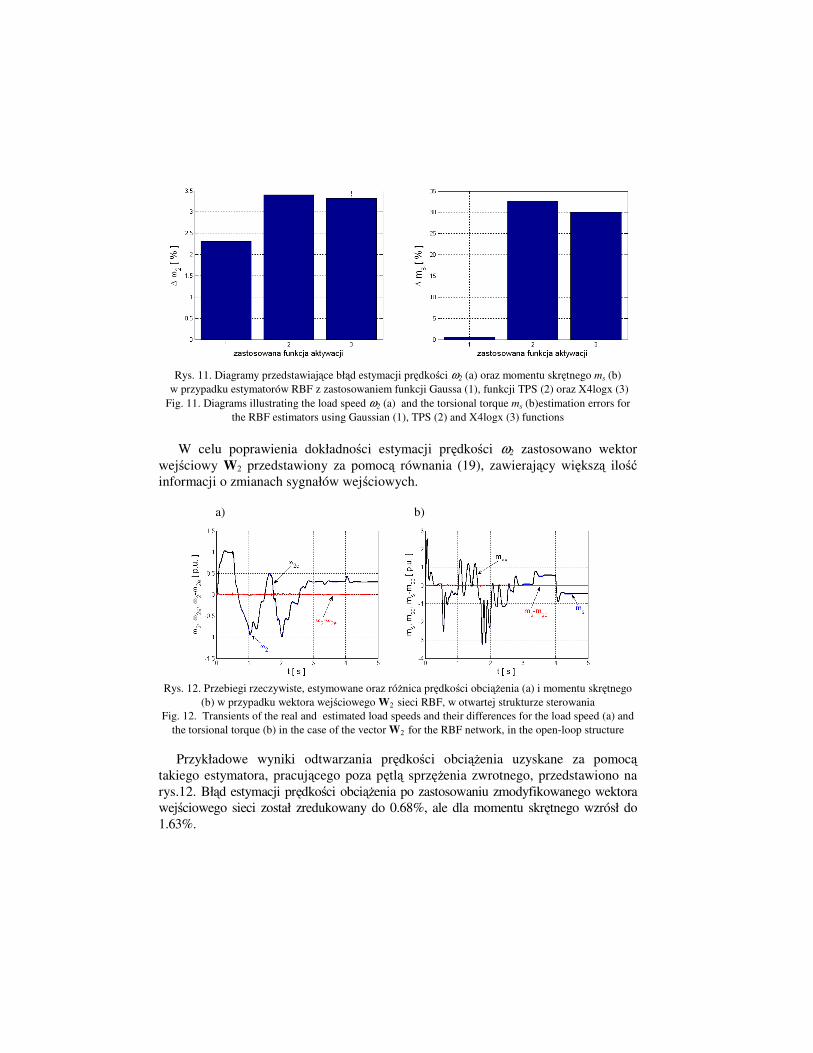
Rys. 11. Diagramy przedstawiające błąd estymacji prędkości ω2 (a) oraz momentu skrętnego ms (b) w przypadku estymatorów RBF z zastosowaniem funkcji Gaussa (1), funkcji TPS (2) oraz X4logx (3) Fig. 11. Diagrams illustrating the load speed ω2 (a) and the torsional torque ms (b)estimation errors for
the RBF estimators using Gaussian (1), TPS (2) and X4logx (3) functions W celu poprawienia dokładności estymacji prędkości ω2 zastosowano wektor
wejściowy W2 przedstawiony za pomocą równania (19), zawierający większą ilość informacji o zmianach sygnałów wejściowych.
a) b)
Rys. 12. Przebiegi rzeczywiste, estymowane oraz różnica prędkości obciążenia (a) i momentu skrętnego
(b) w przypadku wektora wejściowego W2 sieci RBF, w otwartej strukturze sterowania Fig. 12. Transients of the real and estimated load speeds and their differences for the load speed (a) and
the torsional torque (b) in the case of the vector W2 for the RBF network, in the open-loop structure
Przykładowe wyniki odtwarzania prędkości obciążenia uzyskane za pomocą takiego estymatora, pracującego poza pętlą sprzężenia zwrotnego, przedstawiono na rys.12. Błąd estymacji prędkości obciążenia po zastosowaniu zmodyfikowanego wektora wejściowego sieci został zredukowany do 0.68%, ale dla momentu skrętnego wzrósł do 1.63%.
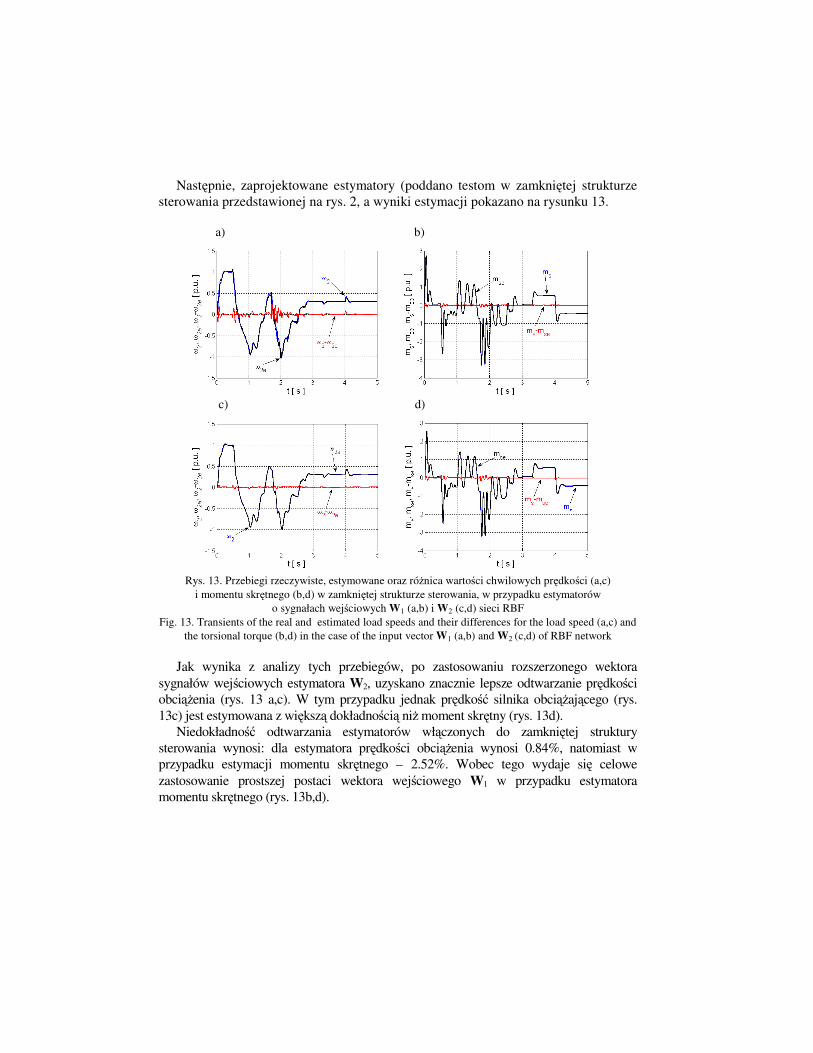
Następnie, zaprojektowane estymatory (poddano testom w zamkniętej strukturze sterowania przedstawionej na rys. 2, a wyniki estymacji pokazano na rysunku 13.
a) b)
c) d)
Rys. 13. Przebiegi rzeczywiste, estymowane oraz różnica wartości chwilowych prędkości (a,c)
i momentu skrętnego (b,d) w zamkniętej strukturze sterowania, w przypadku estymatorów o sygnałach wejściowych W1 (a,b) i W2 (c,d) sieci RBF
Fig. 13. Transients of the real and estimated load speeds and their differences for the load speed (a,c) and the torsional torque (b,d) in the case of the input vector W1 (a,b) and W2 (c,d) of RBF network
Jak wynika z analizy tych przebiegów, po zastosowaniu rozszerzonego wektora
sygnałów wejściowych estymatora W2, uzyskano znacznie lepsze odtwarzanie prędkości obciążenia (rys. 13 a,c). W tym przypadku jednak prędkość silnika obciążającego (rys. 13c) jest estymowana z większą dokładnością niż moment skrętny (rys. 13d).
Niedokładność odtwarzania estymatorów włączonych do zamkniętej struktury sterowania wynosi: dla estymatora prędkości obciążenia wynosi 0.84%, natomiast w przypadku estymacji momentu skrętnego – 2.52%. Wobec tego wydaje się celowe zastosowanie prostszej postaci wektora wejściowego W1 w przypadku estymatora momentu skrętnego (rys. 13b,d).
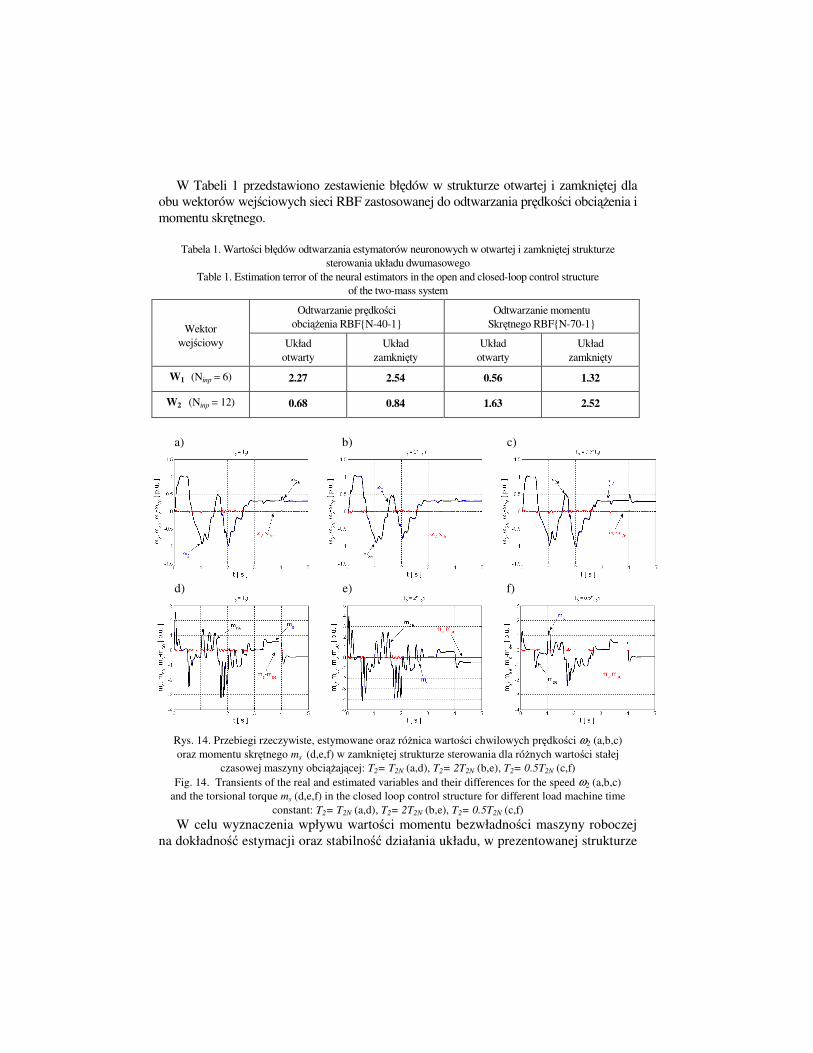
W Tabeli 1 przedstawiono zestawienie błędów w strukturze otwartej i zamkniętej dla obu wektorów wejściowych sieci RBF zastosowanej do odtwarzania prędkości obciążenia i momentu skrętnego.
Tabela 1. Wartości błędów odtwarzania estymatorów neuronowych w otwartej i zamkniętej strukturze
sterowania układu dwumasowego Table 1. Estimation terror of the neural estimators in the open and closed-loop control structure
of the two-mass system
Odtwarzanie prędkości obciążenia RBF{N-40-1}
Odtwarzanie momentu Skrętnego RBF{N-70-1}
Wektor wejściowy Układ
otwarty Układ
zamknięty Układ
otwarty Układ
zamknięty
W1 (Ninp = 6) 2.27 2.54 0.56 1.32
W2 (Ninp = 12) 0.68 0.84 1.63 2.52
a) b) c)
d) e) f)
Rys. 14. Przebiegi rzeczywiste, estymowane oraz różnica wartości chwilowych prędkości ω2 (a,b,c) oraz momentu skrętnego ms (d,e,f) w zamkniętej strukturze sterowania dla różnych wartości stałej
czasowej maszyny obciążającej: T2= T2N (a,d), T2= 2T2N (b,e), T2= 0.5T2N (c,f) Fig. 14. Transients of the real and estimated variables and their differences for the speed ω2 (a,b,c)
and the torsional torque ms (d,e,f) in the closed loop control structure for different load machine time constant: T2= T2N (a,d), T2= 2T2N (b,e), T2= 0.5T2N (c,f)
W celu wyznaczenia wpływu wartości momentu bezwładności maszyny roboczej na dokładność estymacji oraz stabilność działania układu, w prezentowanej strukturze
sterowania z estymatorami neuronowymi wprowadzano różne wartości mechanicznej stałej czasowej T2 obciążenia i przetestowano odporność estymatorów na zmiany tej wielkości. Wyniki tych badań przedstawiono na rys. 14. Na ich podstawie można stwierdzić, że dla wartości mechanicznej stałej czasowej T2 z przedziału (0.5÷2)T2N błędy estymacji nie różnią się od siebie o więcej niż 1%. Takie wahania błędu estymatorów nie zakłócają działania napędu i układ pracuje stabilnie.
W związku z tym można stwierdzić, że zaprojektowane estymatory są odporne na zmiany momentu bezwładności maszyny obciążającej. Warto podkreślić, że zmiany stałej czasowej T2 nie były uwzględnione w próbkach wykorzystywanych w procesie uczenia sieci neuronowej.
6. PODSUMOWANIE
Sieci neuronowe radialne umożliwiają odtwarzanie wybranych przebiegów układu napędowego z bardzo dużą dokładnością. Projektowanie estymatorów neuronowych, w przeciwieństwie do układów algorytmicznych, nie wymaga posiadania informacji o parametrach obiektu oraz znajomości jego modelu matematycznego. Zastosowanie radialnych sieci neuronowych znacznie upraszcza dobór topologii estymatorów, mający istotny wpływ na dokładność odtwarzania zmiennych stanu układu napędowego z połączeniem sprężystym.
W przypadku sieci RBF nie pojawia się problem podejmowania decyzji o liczbie warstw ukrytych, ponadto występuje mniejsza czułość na zmiany liczby neuronów ukrytych niż w sieciach MLP. Uzyskano znacznie większą dokładność estymacji prędkości obciążenia w wyniku rozszerzenia wektora sygnałów wejściowych sieci o dodatkowe składowe związane z pochodną momentu elektromagnetycznego oraz prędkości silnika. Zaprezentowane estymatory zaimplementowane w zamkniętej strukturze sterowania są odporne na zmiany momentu bezwładności maszyny obciąża-jącej.
LITERATURA
[1] Gierlotka K., Układy sterowania napędów elektrycznych z elementami sprężystymi, Zeszyty Naukowe Politechniki Śląskiej, Nr 1181, Gliwice,1992.
[2] Orlowska-Kowalska T., Kaminski M., Szabat K., Optimization of the Neural State Variable Estima-
tors for the Two-mass Drive Systems, Proc. of 16th EDPE Confer., Slovak Rep., 2007 (on CD). [3] Orlowska-Kowalska T., Szabat K., Neural-Network Application for Mechanical Variables Estimation
of a Two-Mass Drive System, IEEE Trans. on Ind. Electr., vol. 54, no.3, 2007, pp. 1352-1364. [4] Orlowska-Kowalska T., Szabat K., Vibration Suppression in Two-Mass Drive System using PI Speed
Controller and Additional Feedbacks – Comparative Study, Trans. on Industrial Electronics, vol. 54, no.2, 2007, pp. 1193-1206.

[5] Szabat K., Orlowska-Kowalska T., Analysis of the algorithmic methods of state variables estimation
for the drive system with elastic joint, in: Monograph "Computer Applications in Electrical Engineer-ing", Part II, Poznan University of Technol., ALWERS Press, Poznan, 2006, pp. 99-116.
[6] Orłowska-Kowalska T., Kamiński M., Zastosowanie metody OBD do optymalizacji struktury
neuronowych estymatorów zmiennych stanu napędu dwumasowego, Mater. VIII Kraj. Konfer. Sterowanie w Energoelektronice i Napędzie Elektrycznym SENE’2007, Łódź, 2007
[7] Zhang A., Zhang L., RBF neural networks for the prediction of building interference effects, Elsevier, Computers&Structures, vol. 82, 2004, pp. 2333-2339.
[8] Osowski S., Sieci neuronowe do przetwarzania informacji, Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2006.
RADIAL BASIS FUNCTION NEURAL NETWORK FOR STATE VARIABLE ESTIMATION OF THE NONLINEAR TWO-MASS DRIVE
In the paper application of the radial basis function neural networks to mechanical state variable esti-mation of the drive system with elastic coupling is presented. The mathematical model of the drive system was expanded by using nonlinear elements related to the backlash and the friction phenomena. The main stages of the design methodology of neural estimators of the torsional torque and the load machine speed were presented. The signals estimated by neural networks were used in the control structure of the drive system with elastic joint. The simulation results show good precision of both presented neural estimators for wide range of changes of the reference speed and load torque. Furthermore, the simulation tests show influence of numbers of hidden neurons and type of activation functions on the precision of estimation. The succeeding results show robustness of neural estimators against changes of mechanical time constant of the load machine.
Praca naukowa finansowana ze środków na naukę w latach 2007-2009 jako projekt badawczy
N510 023 32/2345

![liczba GA-pp stanin liczba GA-pr liczba GN-pp stanin liczba GN-pr … · 2013. 6. 24. · GA-pr [%] liczba uczniów GN-pp [%] stanin (min. 5 uczniów) liczba uczniów GN-pr [%] WOJ.](https://static.fdocuments.pl/doc/165x107/5fe2963c4645e507466e6306/liczba-ga-pp-stanin-liczba-ga-pr-liczba-gn-pp-stanin-liczba-gn-pr-2013-6-24.jpg)