"Korekcja zazębienia, przekładnie planetarne" (203.pdf 1,4MB)
Mechanizmy zębate
Przekładnie zębate
V M
M w w
SILNIK
ORGAN
ROBOCZY
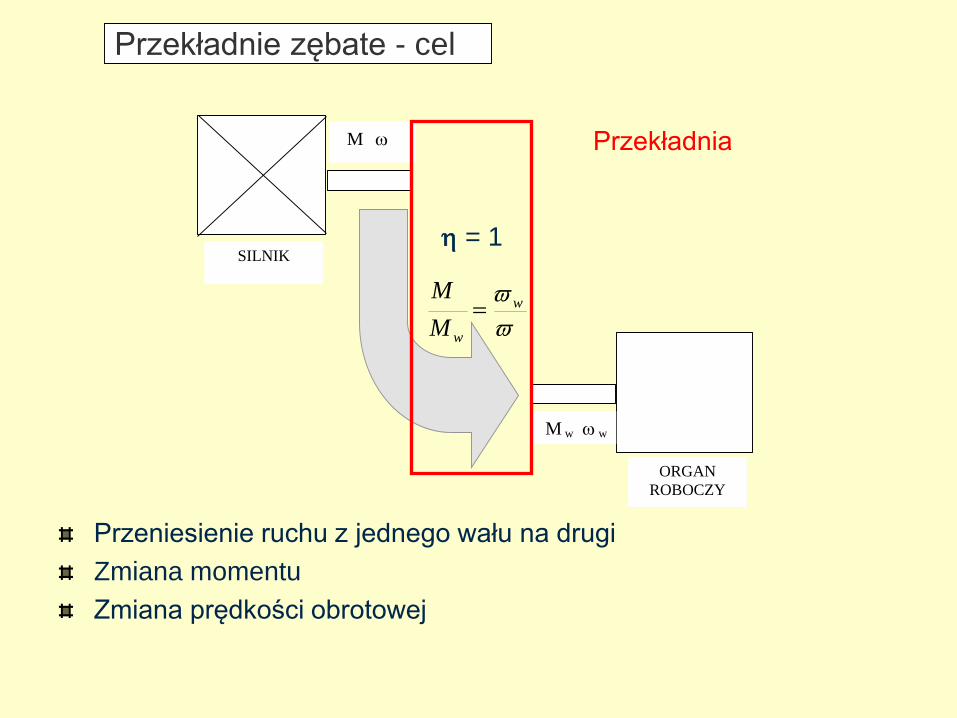
Przekładnie zębate - cel
Przekładnia
= 1
w
wM
M
Przeniesienie ruchu z jednego wału na drugi
Zmiana momentu
Zmiana prędkości obrotowej
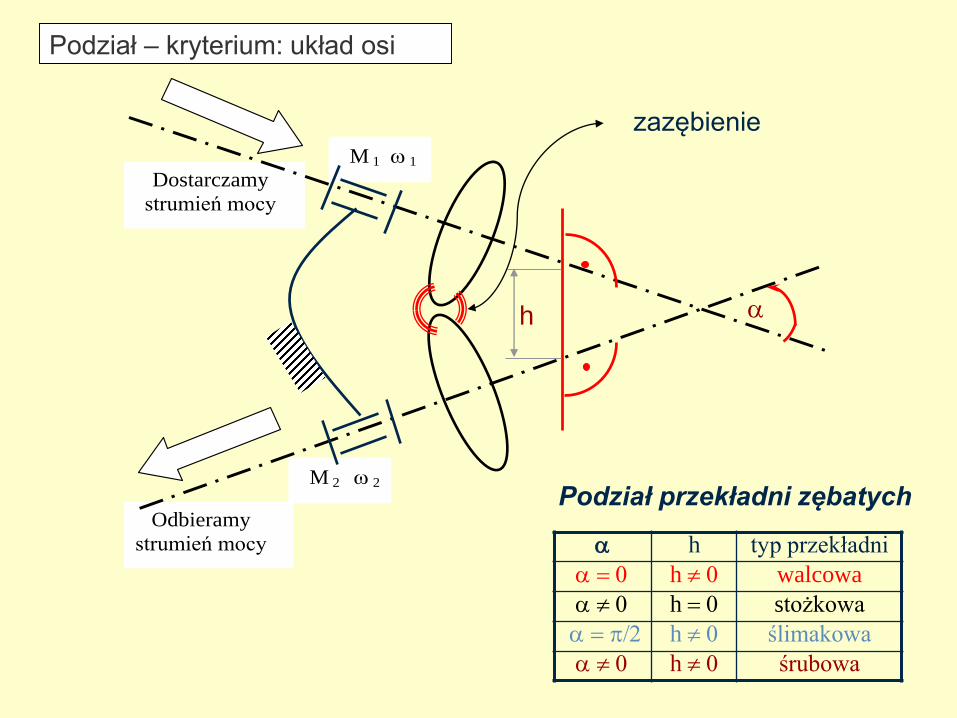
Podział przekładni zębatych
M 1 1
Dostarczamy
strumień mocy
M 2 2
Odbieramy
strumień mocy
h a
zazębienie
a h typ przekładni
a 0 h 0 walcowa
a 0 h 0 stożkowa
a /2 h 0 ślimakowa
a 0 h 0 śrubowa
Podział – kryterium: układ osi
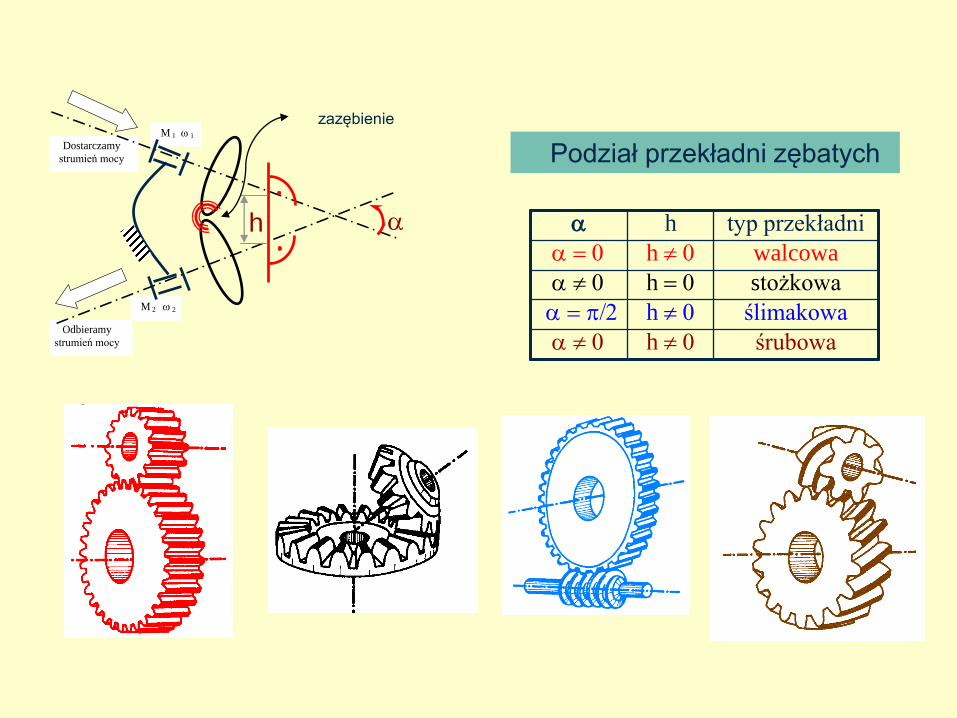
Podział przekładni zębatych
M 1 1
Dostarczamy
strumień mocy
M 2 2
Odbieramy
strumień mocy
h a
zazębienie
a h typ przekładni
a 0 h 0 walcowa
a 0 h 0 stożkowa
a /2 h 0 ślimakowa
a 0 h 0 śrubowa

Przykłady przekładni zębatych

Przykłady przekładni zębatych
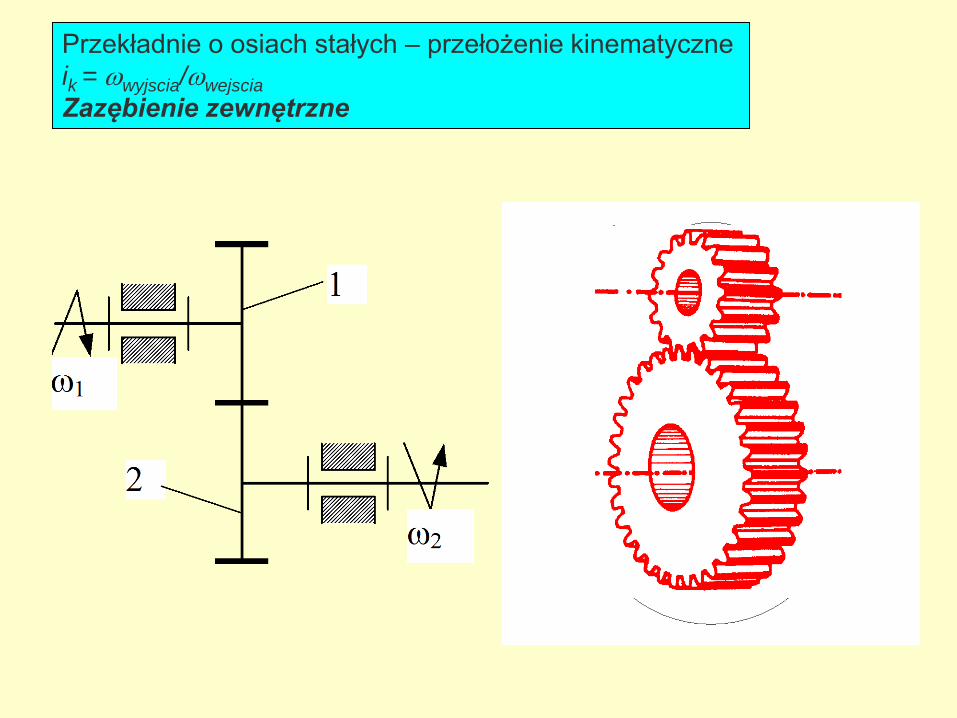
Przekładnie o osiach stałych – przełożenie kinematyczne
ik = wyjscia/wejscia
Zazębienie zewnętrzne
2
2
1
1
v
v
R
R
2
1
1
2
21)1(
R
Ri
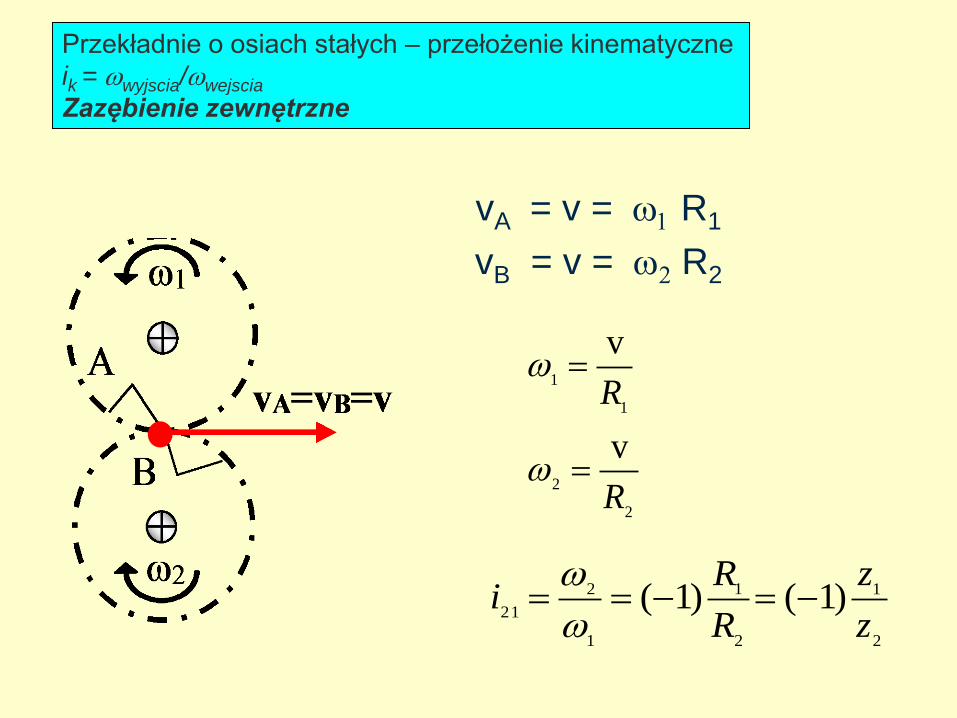
vA = v = 1 R1
vB = v = 2 R2
Przekładnie o osiach stałych – przełożenie kinematyczne
ik = wyjscia/wejscia
Zazębienie zewnętrzne
2
1)1(z
z
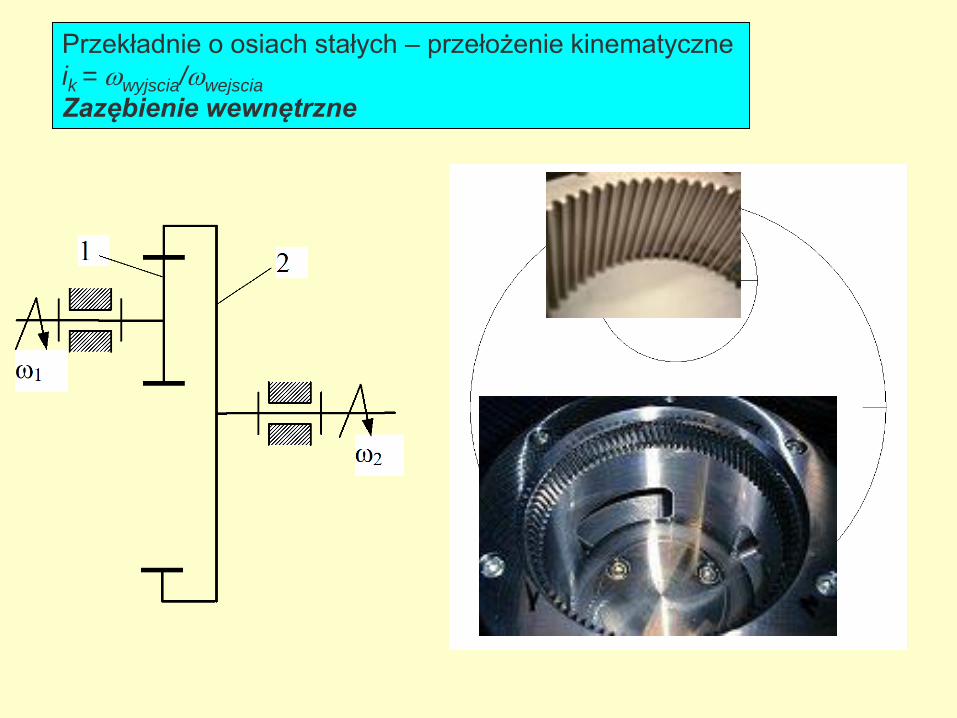
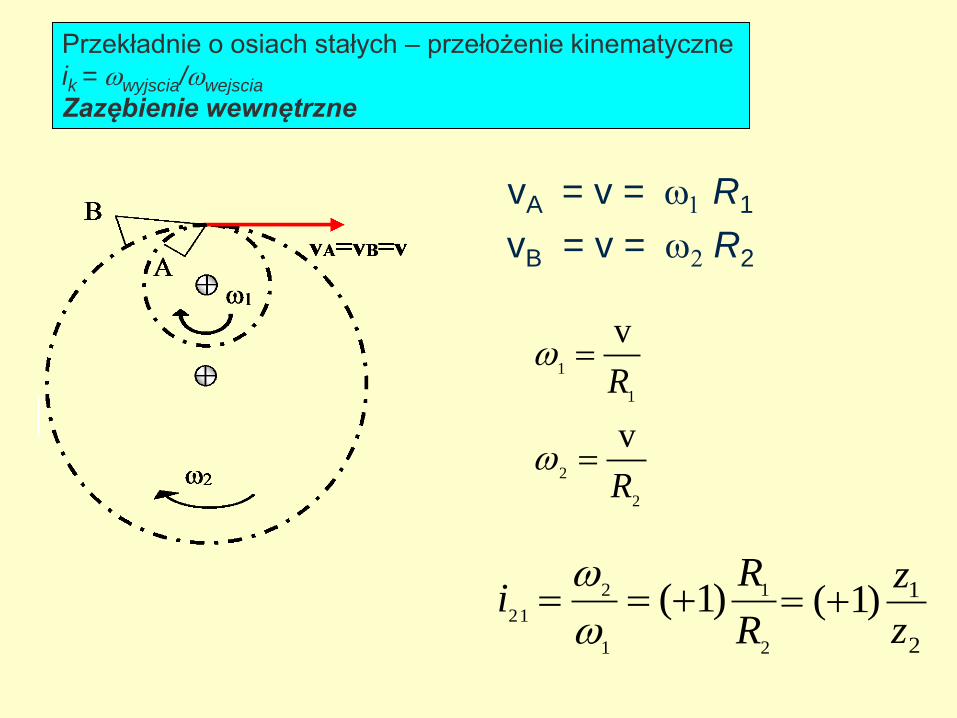
Przekładnie o osiach stałych – przełożenie kinematyczne
ik = wyjscia/wejscia
Zazębienie wewnętrzne
2
2
1
1
v
v
R
R
2
1
1
2
21)1(
R
Ri
Przekładnie o osiach stałych – przełożenie kinematyczne
ik = wyjscia/wejscia
Zazębienie wewnętrzne
vA = v = 1 R1
vB = v = 2 R2
2
1)1(z
z
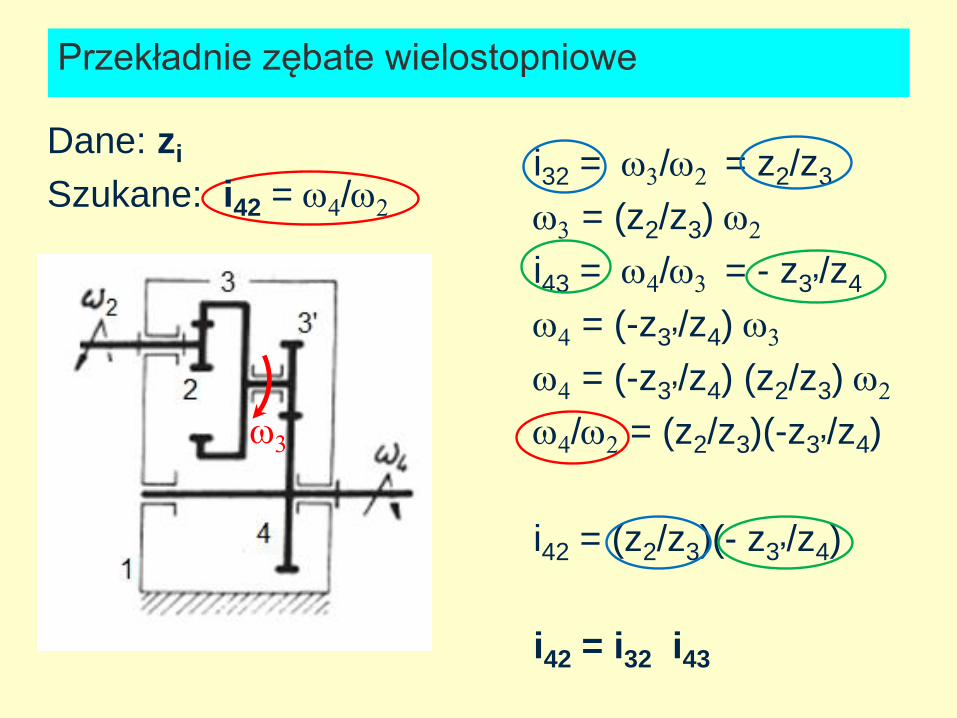
i32 = 3/2 = z2/z3
3 = (z2/z3) 2
i43 = 4/3 = - z3’/z4
4 = (-z3’/z4) 3
4 = (-z3’/z4) (z2/z3) 2
4/2 = (z2/z3)(-z3’/z4)
i42 = (z2/z3)(- z3’/z4)
i42 = i32 i43
3
Przekładnie zębate wielostopniowe
Dane: zi
Szukane: i42 = 4/2
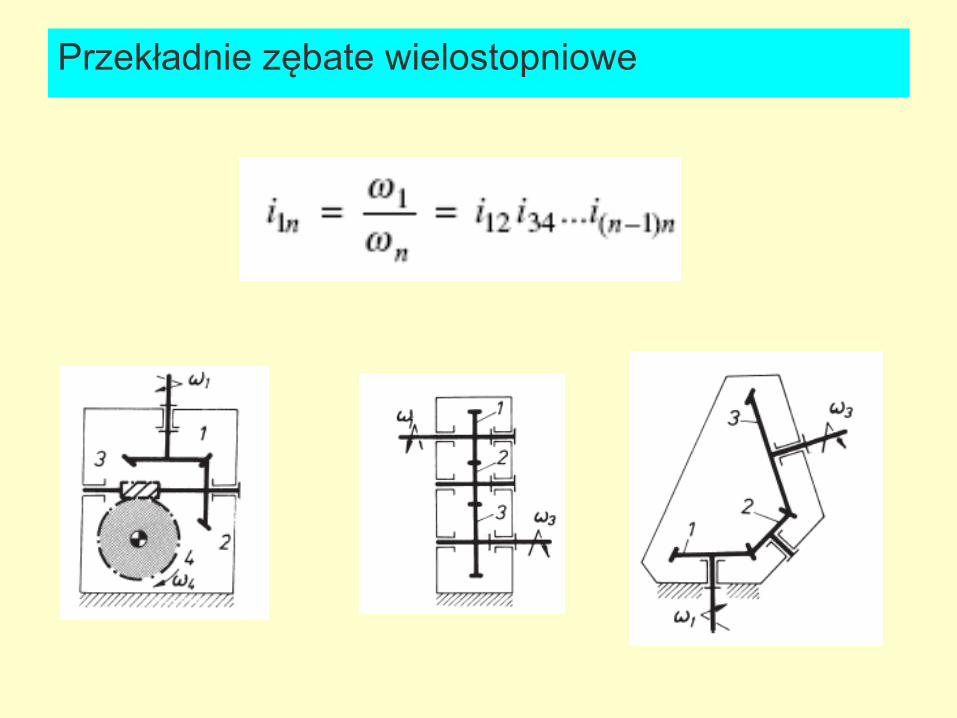
Przekładnie zębate wielostopniowe
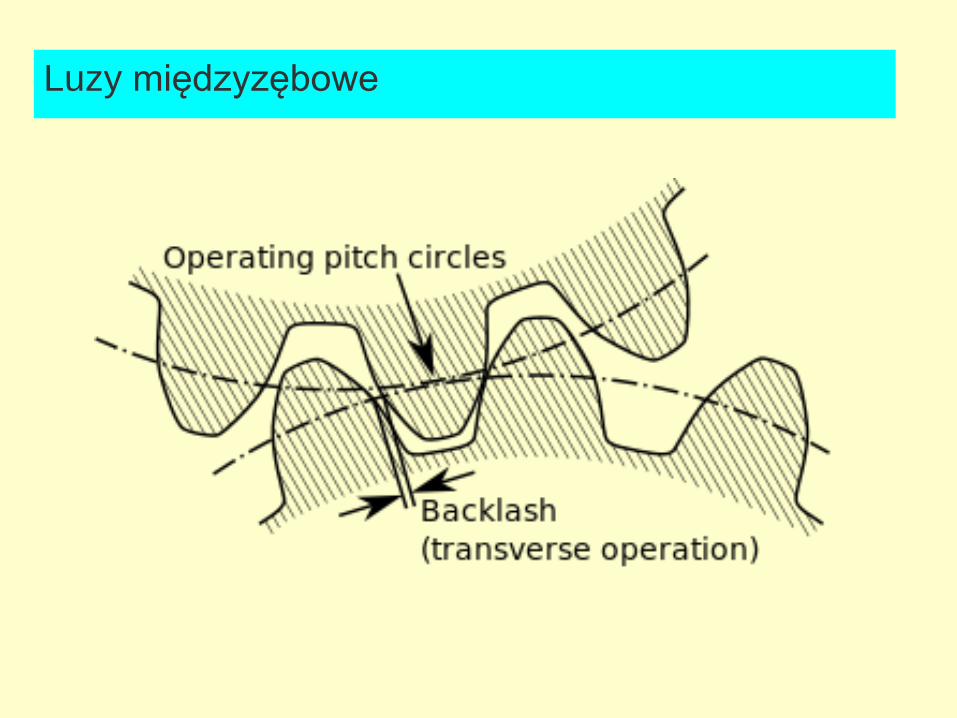
Luzy międzyzębowe
Własności przekładni zębatych o osiach stałych
Stosunkowo tanie w wykonaniu i eksploatacji
Małe przełożenia na jednym zezębieniu
Duże gabaryty i duża masa
Duże przełożenia uzyskuje się dzięki wielu zazębieniom
Występowanie luzów międzyzębowych
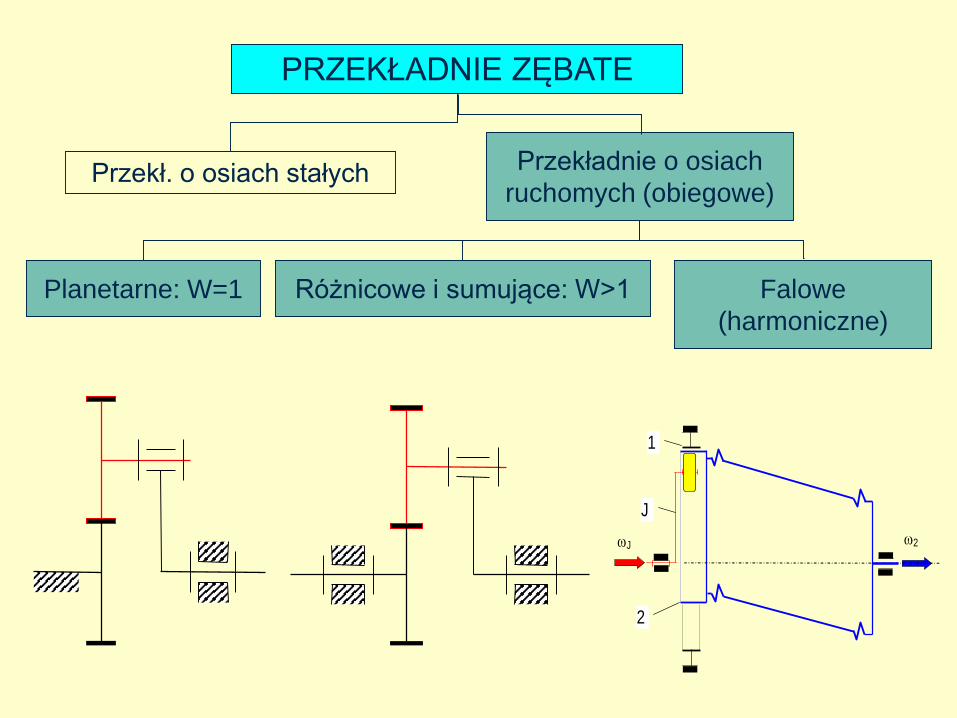
PRZEKŁADNIE ZĘBATE
Przekł. o osiach stałych Przekładnie o osiach
ruchomych (obiegowe)
Planetarne: W=1 Różnicowe i sumujące: W>1 Falowe
(harmoniczne)
J
1
2
J 2
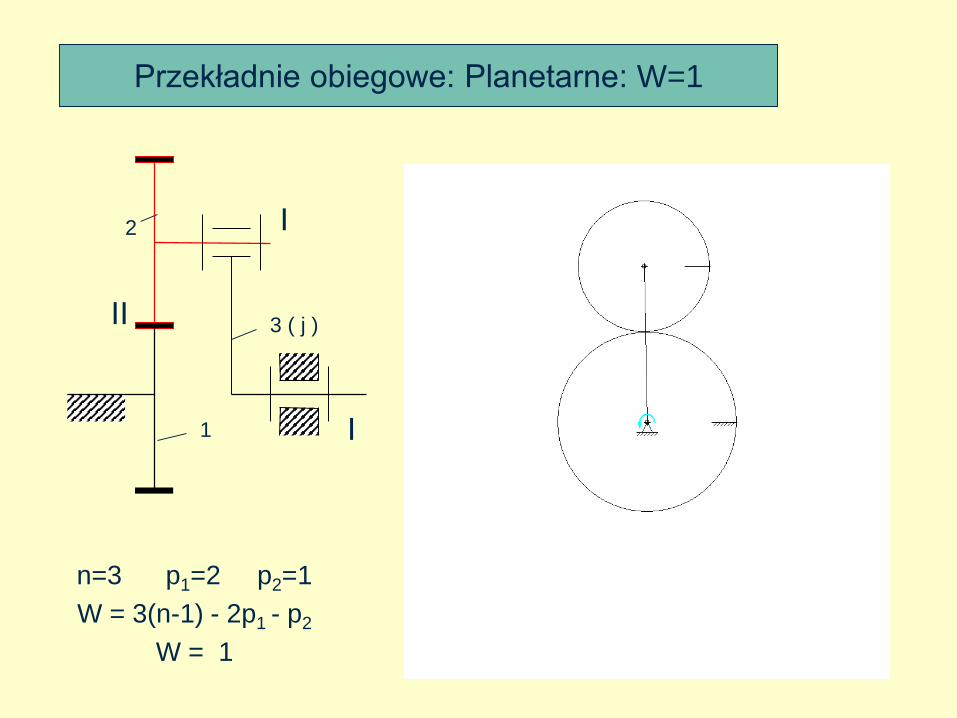
Przekładnie obiegowe: Planetarne: W=1
1
2
3 ( j )
I
I
II
n=3 p1=2 p2=1
W = 3(n-1) - 2p1 - p2
W = 1
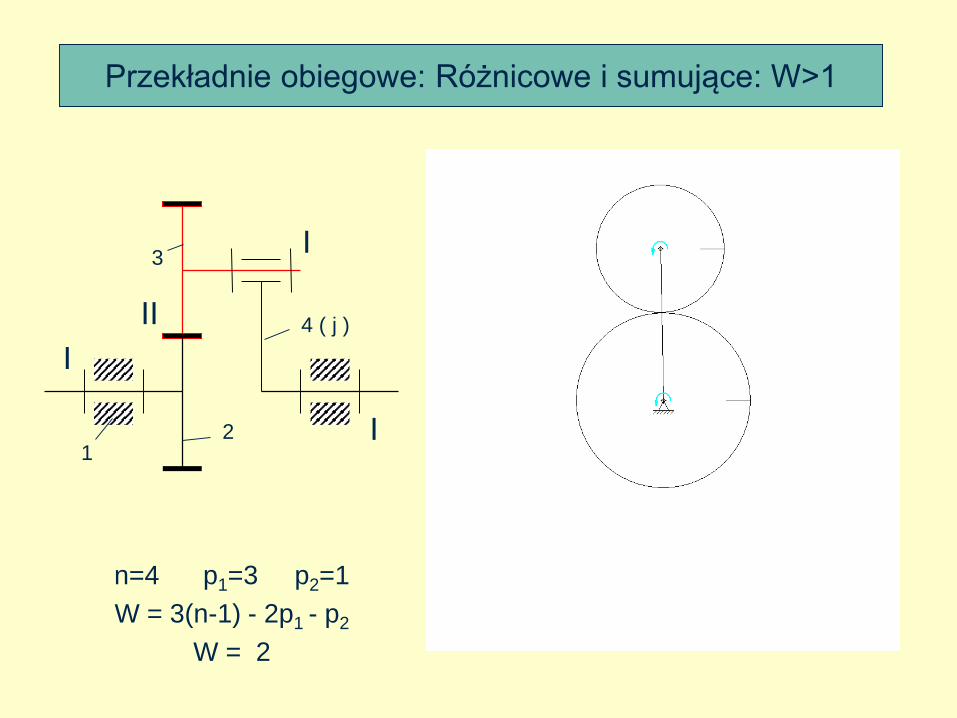
Przekładnie obiegowe: Różnicowe i sumujące: W>1
21
3
4 ( j )
I
I
I
II
n=4 p1=3 p2=1
W = 3(n-1) - 2p1 - p2
W = 2

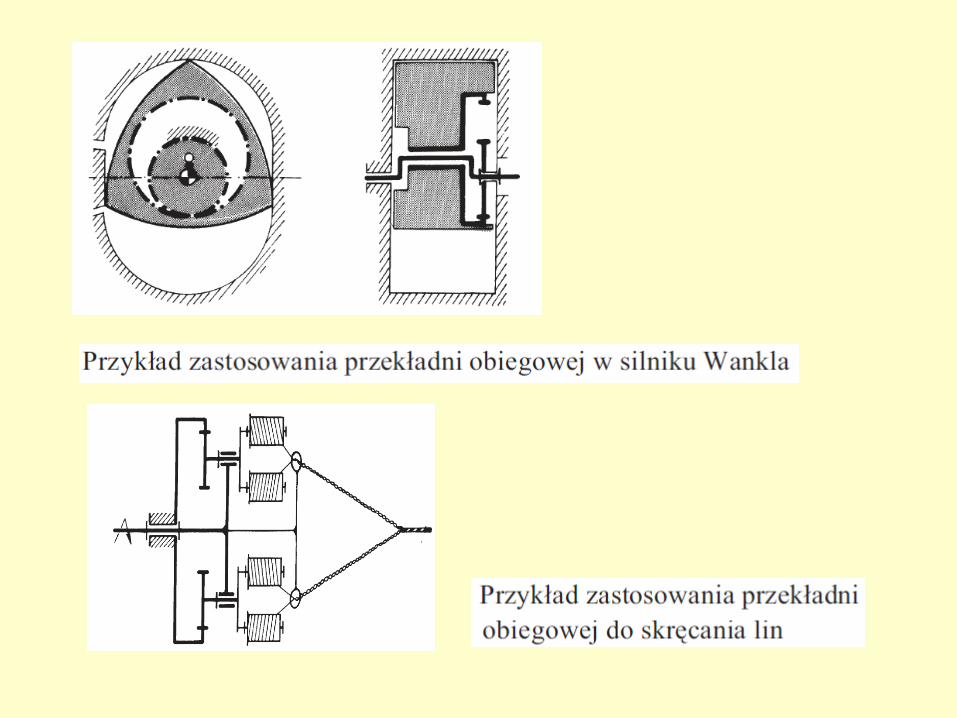
Własności przekładni obiegowych
Ciekawe trajektorie punktów kół obiegowych
Wysokie wymagania dokładnościowe - koszty
Duże przełożenia przy zwartej budowie
Możliwość sumowania kilku napędów (W>1) – p.
sumujące
Zdolność przenoszenia dużych sił (mocy)
Możliwość rozdziału napędu na kilka odbiorników (W>1) –
p. różnicowe
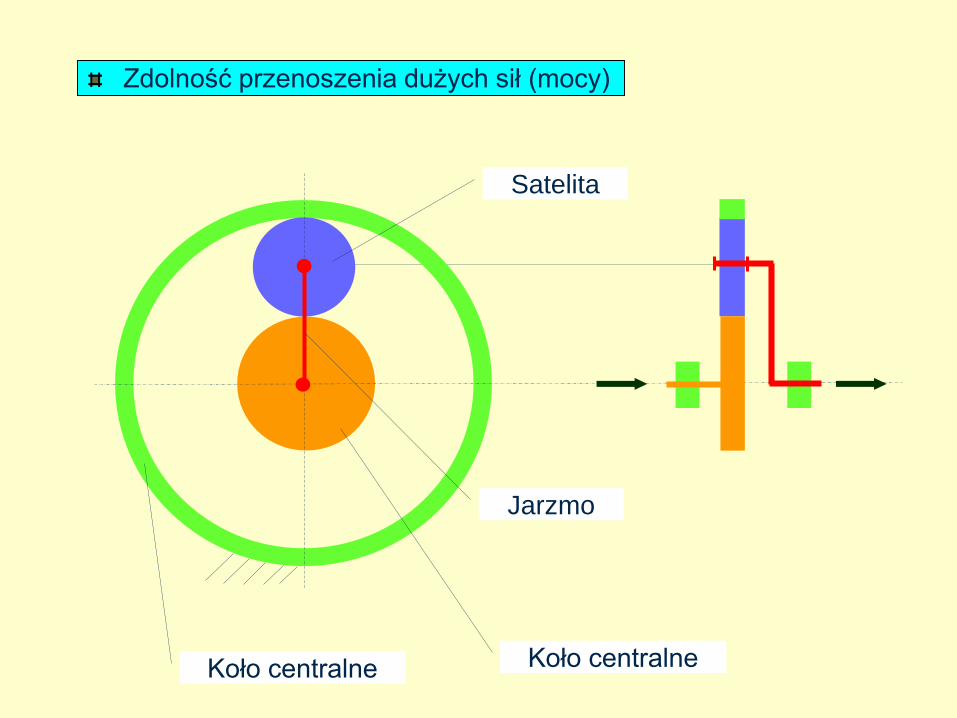
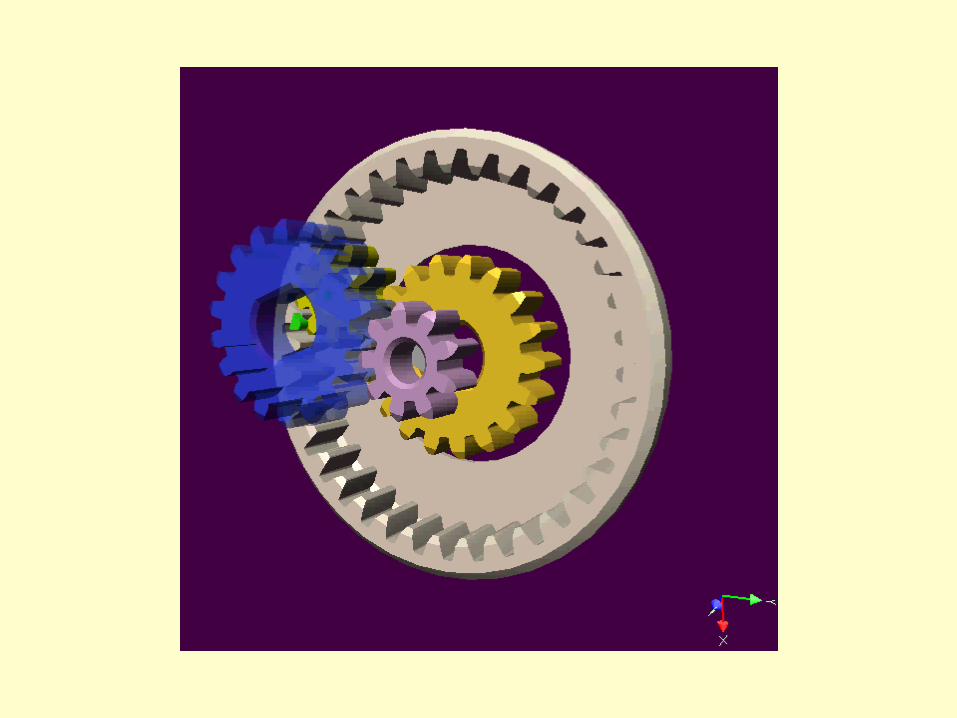
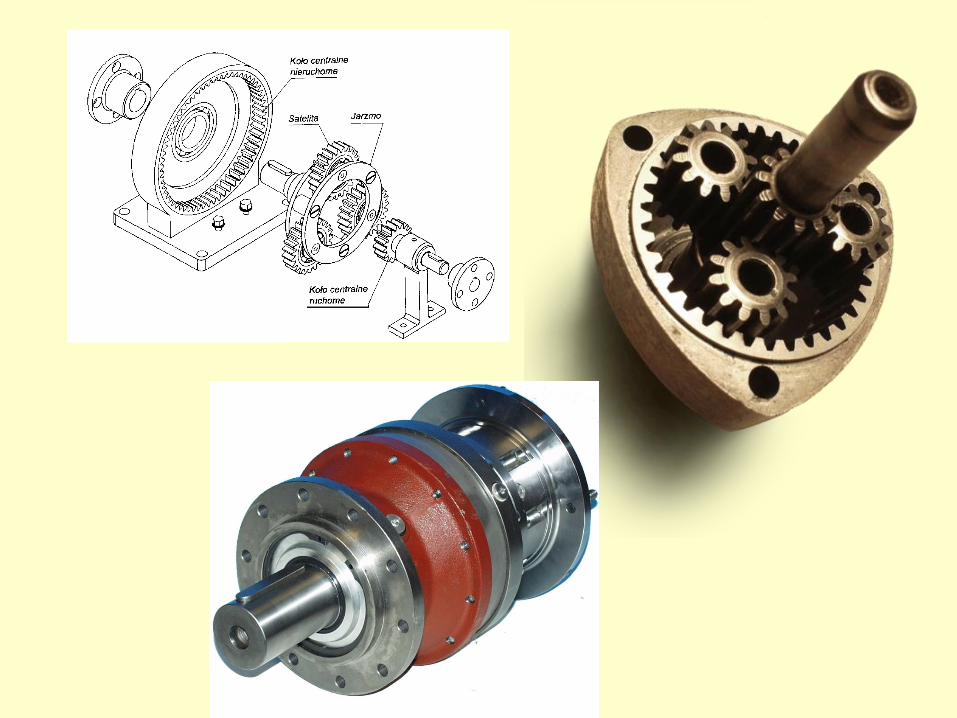
Satelita
Jarzmo
Koło centralneKoło centralne
Zdolność przenoszenia dużych sił (mocy)
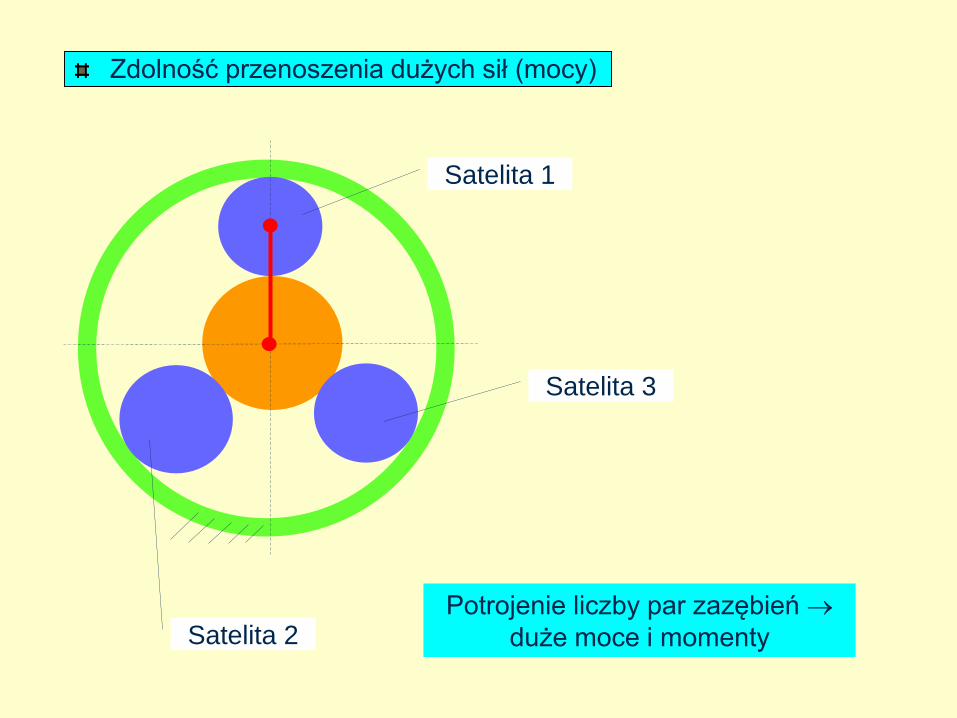
Satelita 3
Satelita 1
Satelita 2Potrojenie liczby par zazębień
duże moce i momenty
Zdolność przenoszenia dużych sił (mocy)
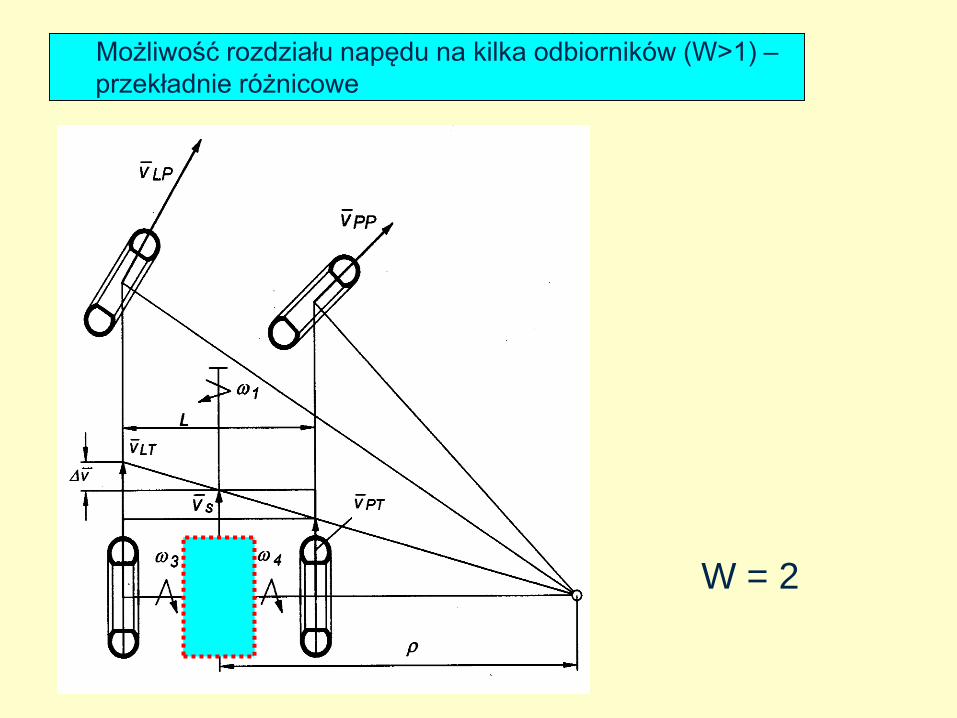
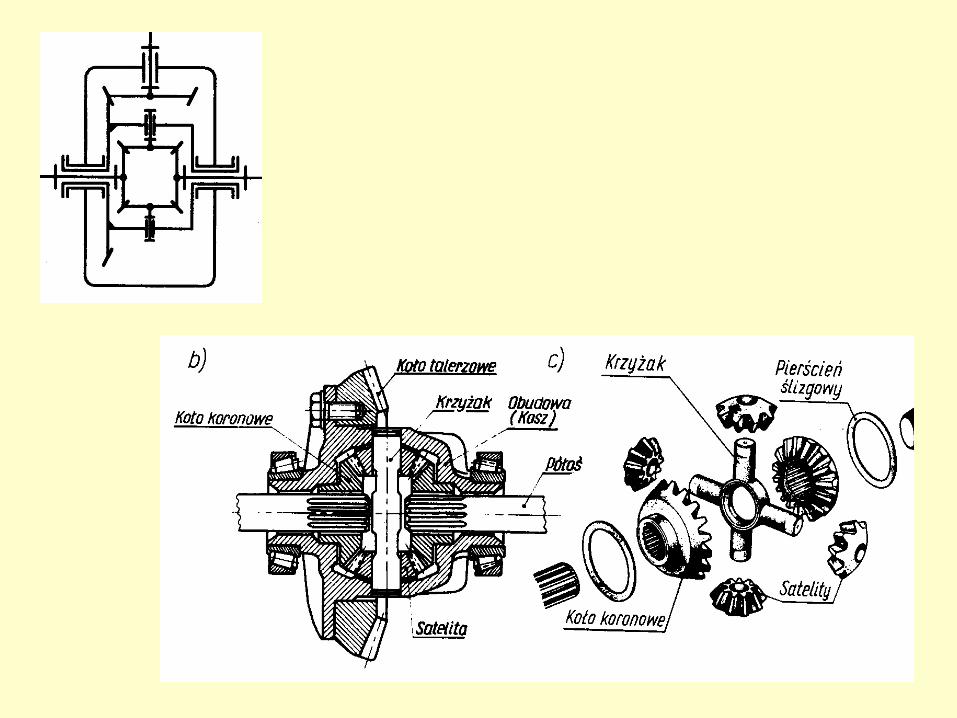
Możliwość rozdziału napędu na kilka odbiorników (W>1) –
przekładnie różnicowe
W = 2
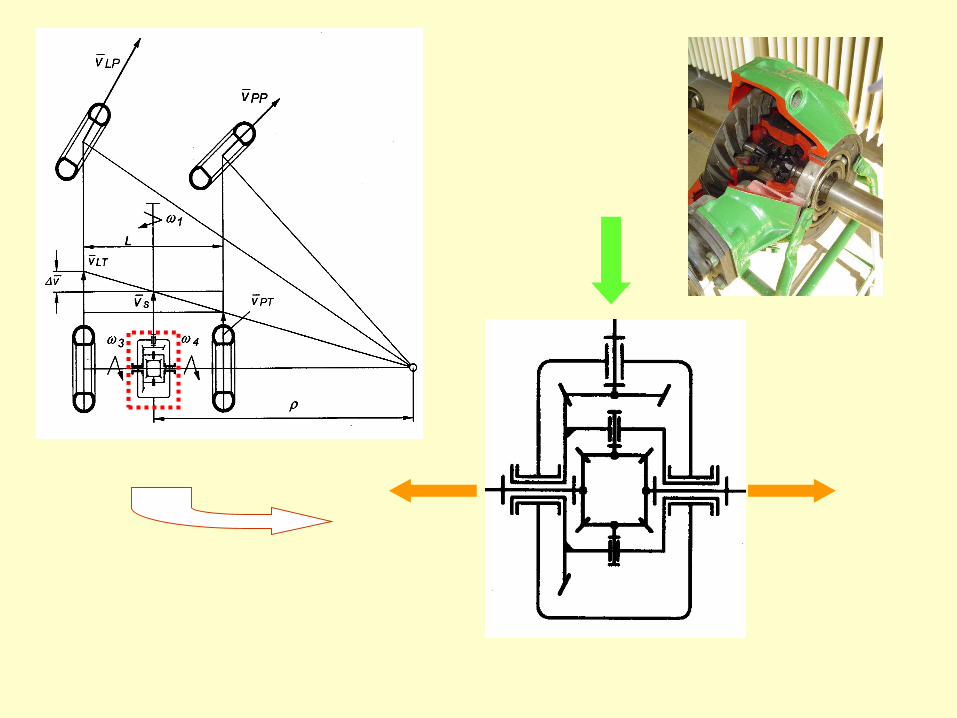

Mechanizm różnicowy
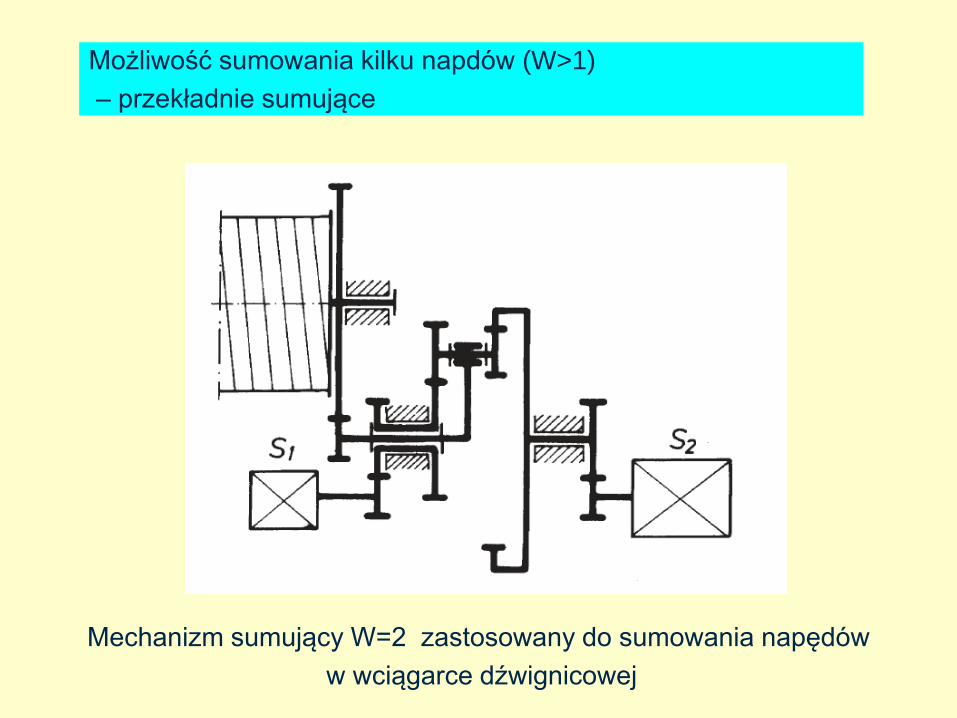
Możliwość sumowania kilku napdów (W>1)
– przekładnie sumujące
Mechanizm sumujący W=2 zastosowany do sumowania napędów
w wciągarce dźwignicowej
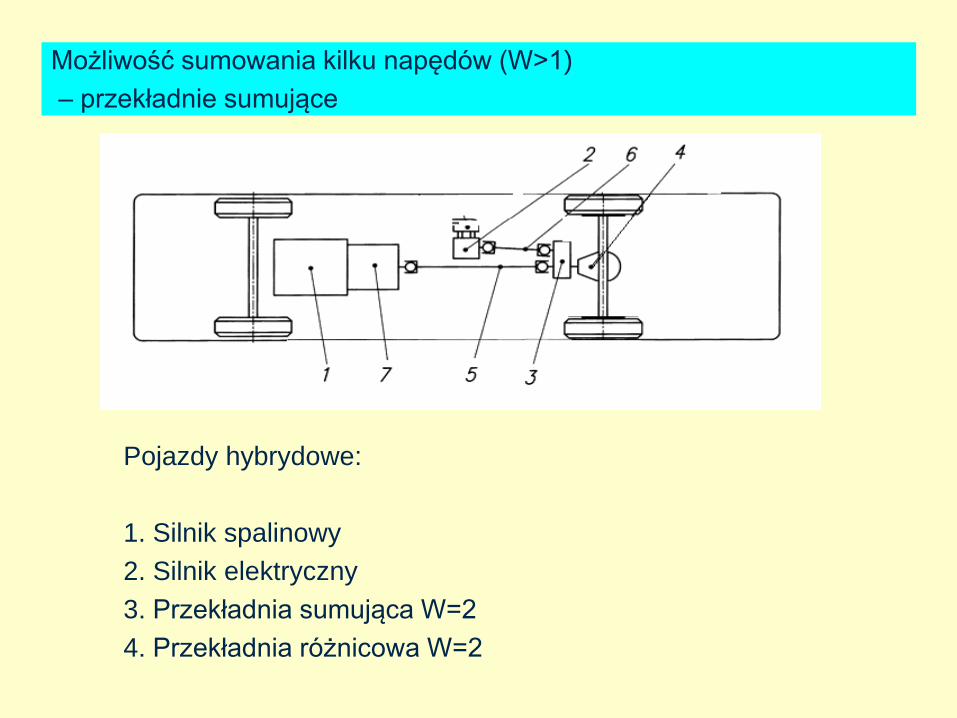
Możliwość sumowania kilku napędów (W>1)
– przekładnie sumujące
Pojazdy hybrydowe:
1. Silnik spalinowy
2. Silnik elektryczny
3. Przekładnia sumująca W=2
4. Przekładnia różnicowa W=2
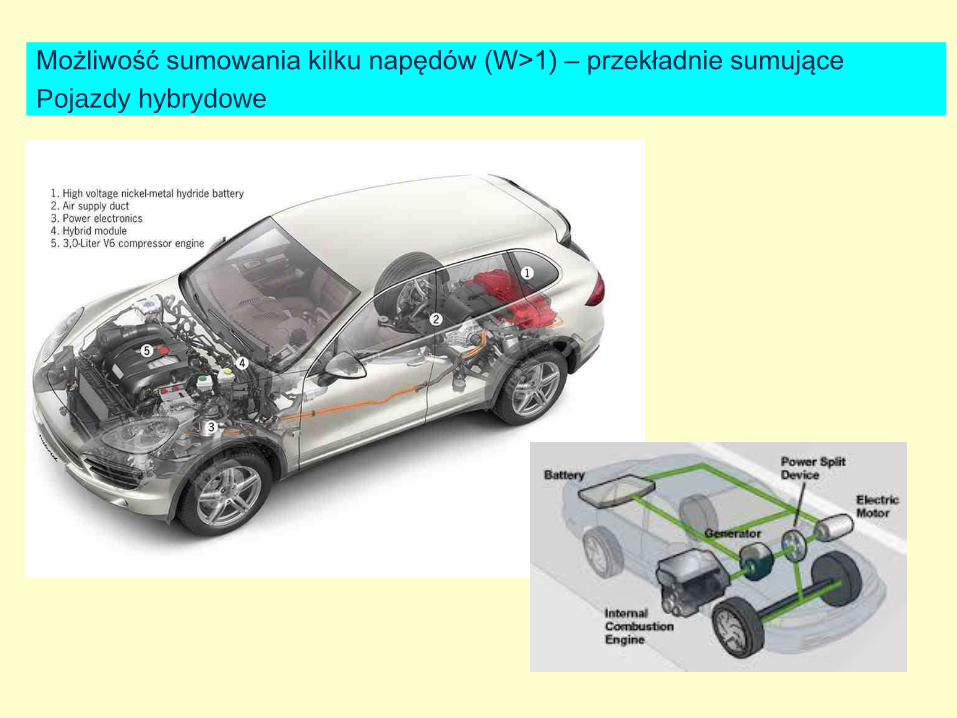
Możliwość sumowania kilku napędów (W>1) – przekładnie sumujące
Pojazdy hybrydowe
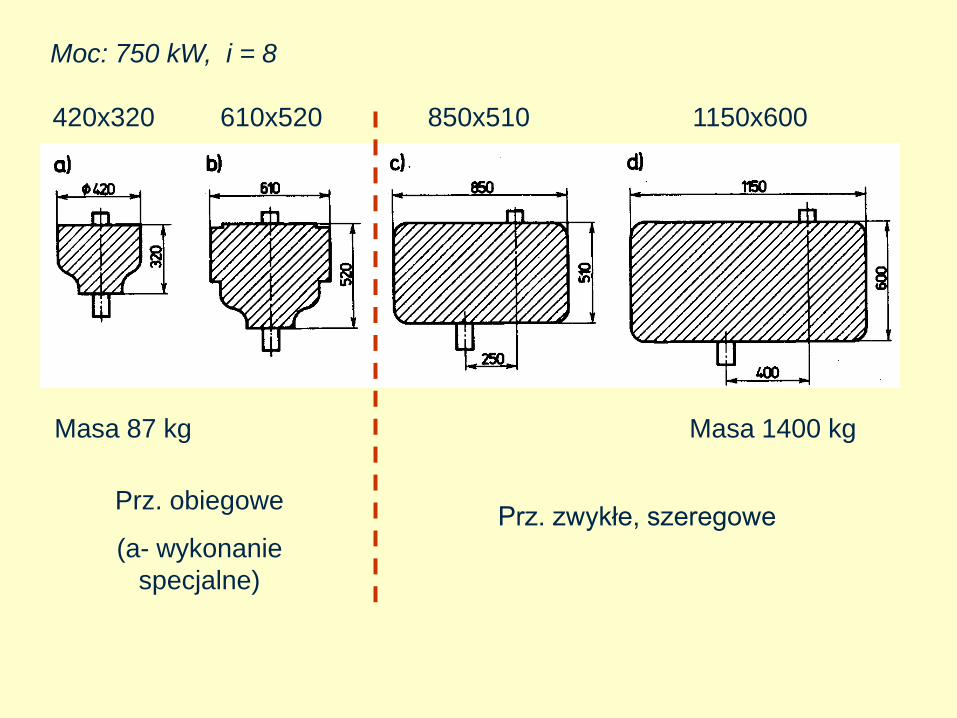
Moc: 750 kW, i = 8
Masa 87 kg Masa 1400 kg
Prz. zwykłe, szeregowePrz. obiegowe
(a- wykonanie
specjalne)
420x320 610x520 850x510 1150x600
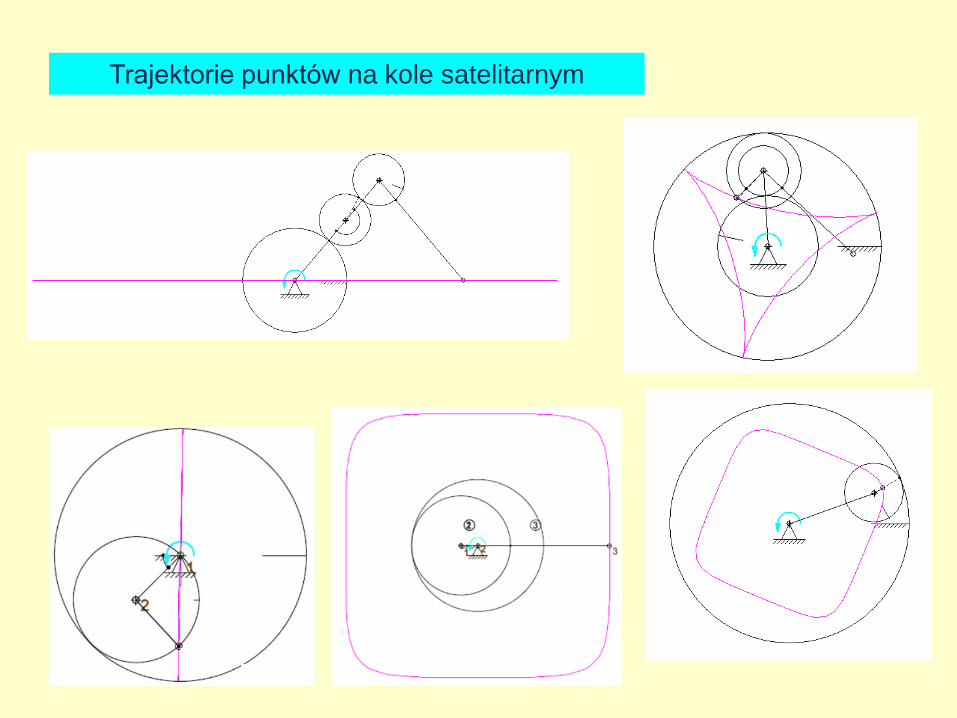
Trajektorie punktów na kole satelitarnym
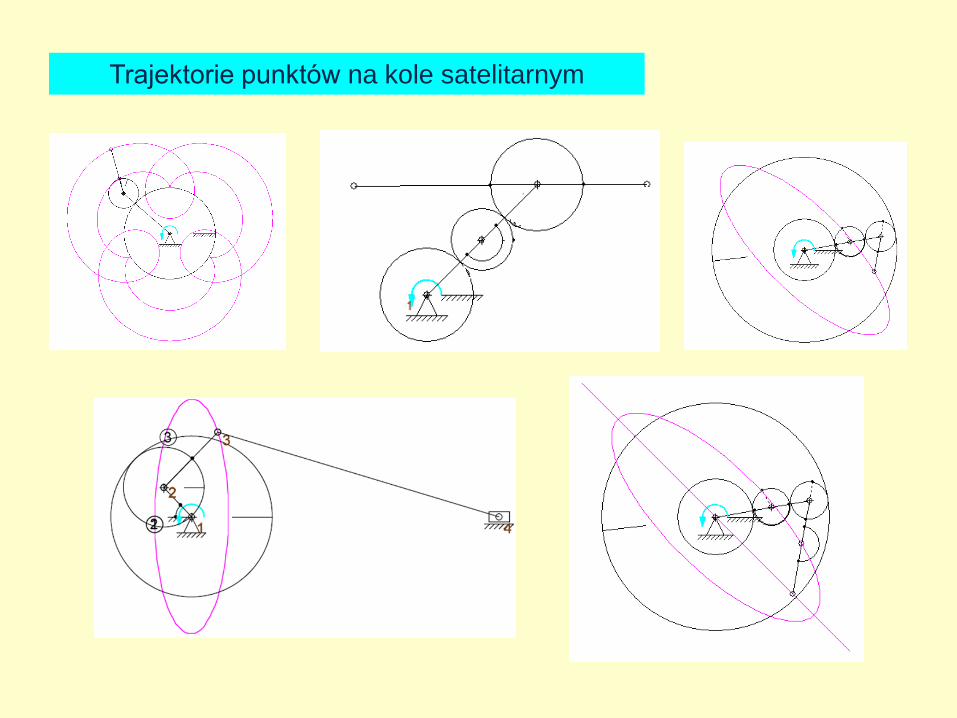
Trajektorie punktów na kole satelitarnym
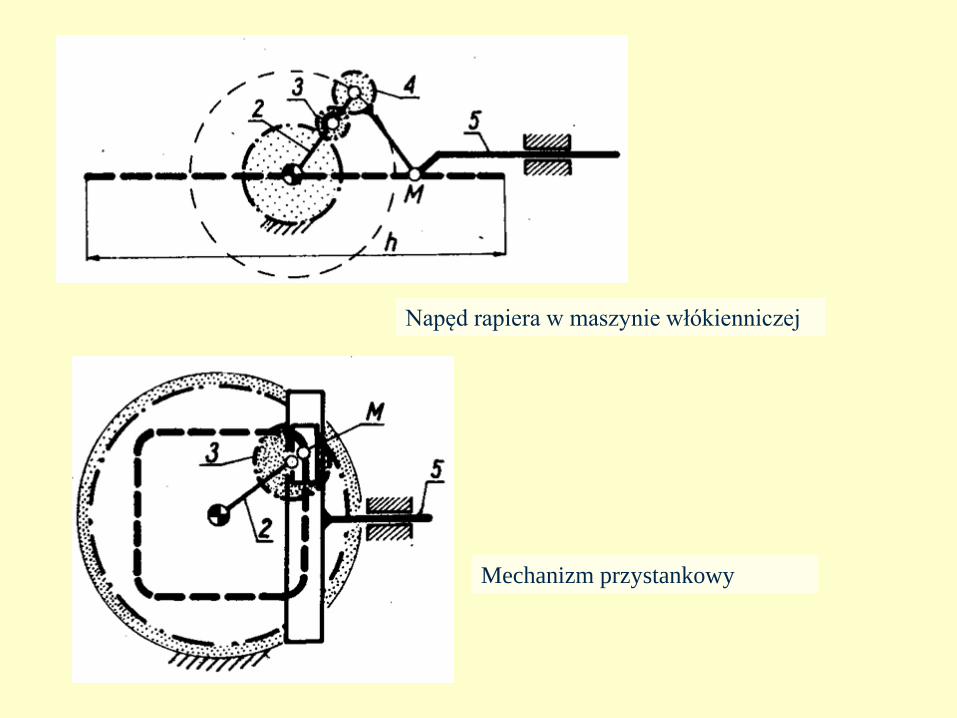
Napęd rapiera w maszynie włókienniczej
Mechanizm przystankowy
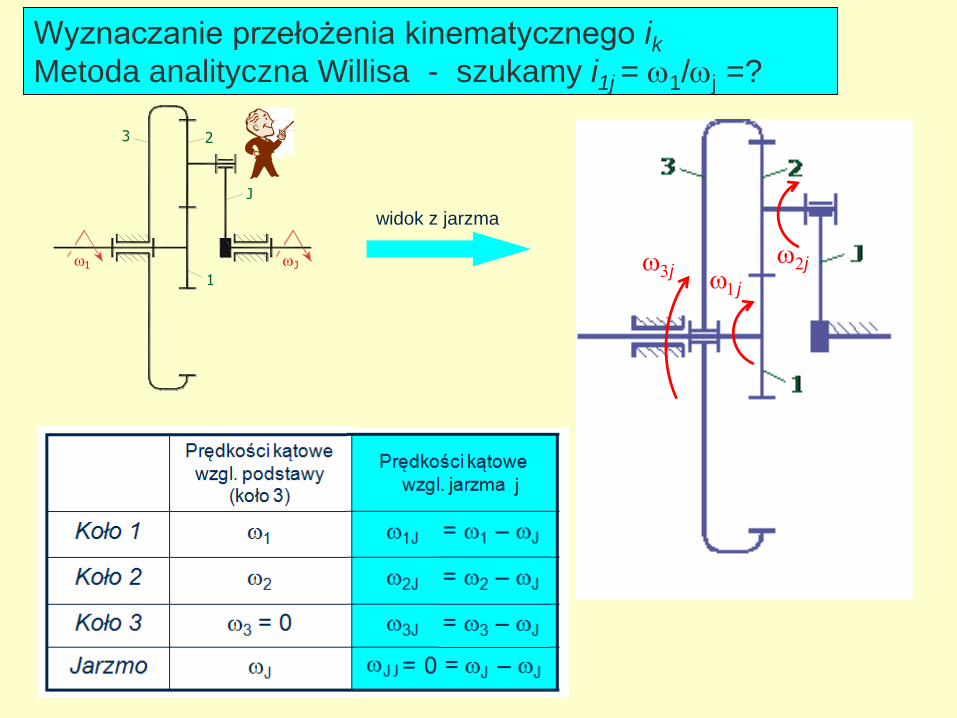
Wyznaczanie przełożenia kinematycznego ikMetoda analityczna Willisa - szukamy i1j = 1/j =?
1
23
J
1 J
widok z jarzma
1j
2j3j
11
31 z
z
J
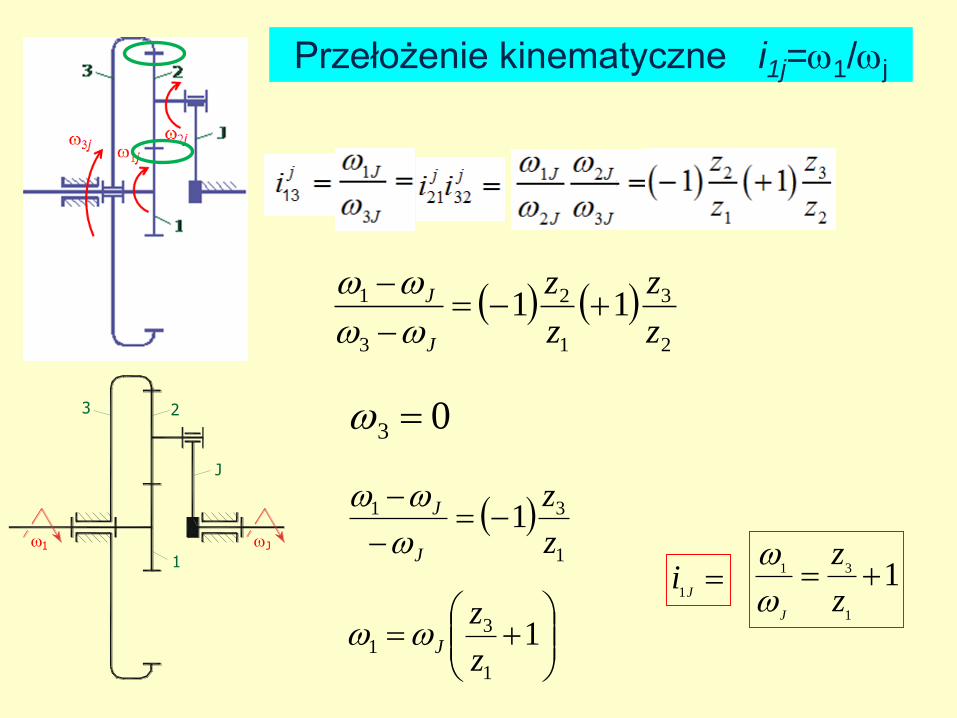
Przełożenie kinematyczne i1j=1/j
1
23
J
1 J
2
3
1
2
3
1 11z
z
z
z
J
J
03
1
31 1z
z
J
J
1
1
31
z
zJ
J
i1
12
3
4
j
j
4
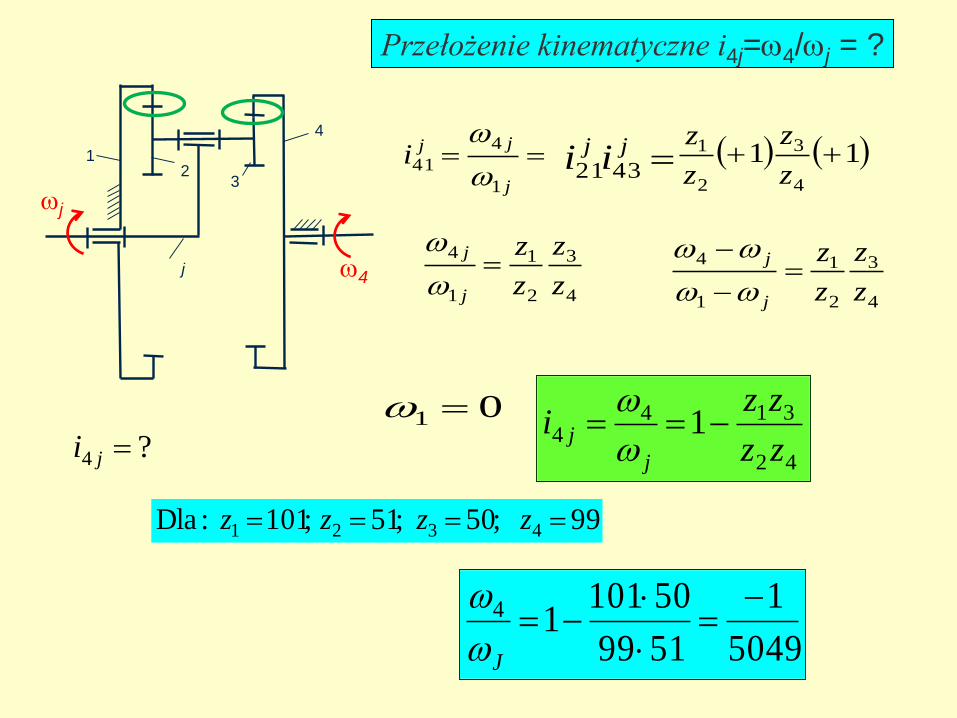
Przełożenie kinematyczne i4j=4/j = ?
?4 ji
j
jji1
4
41
4
3
2
1
1
4
z
z
z
z
j
j
jj ii 4321 11
4
3
2
1 z
z
z
z
4
3
2
1
1
4
z
z
z
z
j
j
01
42
3144 1
zz
zzi
j
j
99 ;50;51;101:Dla 4321 zzzz
5049
1
5199
5010114
J
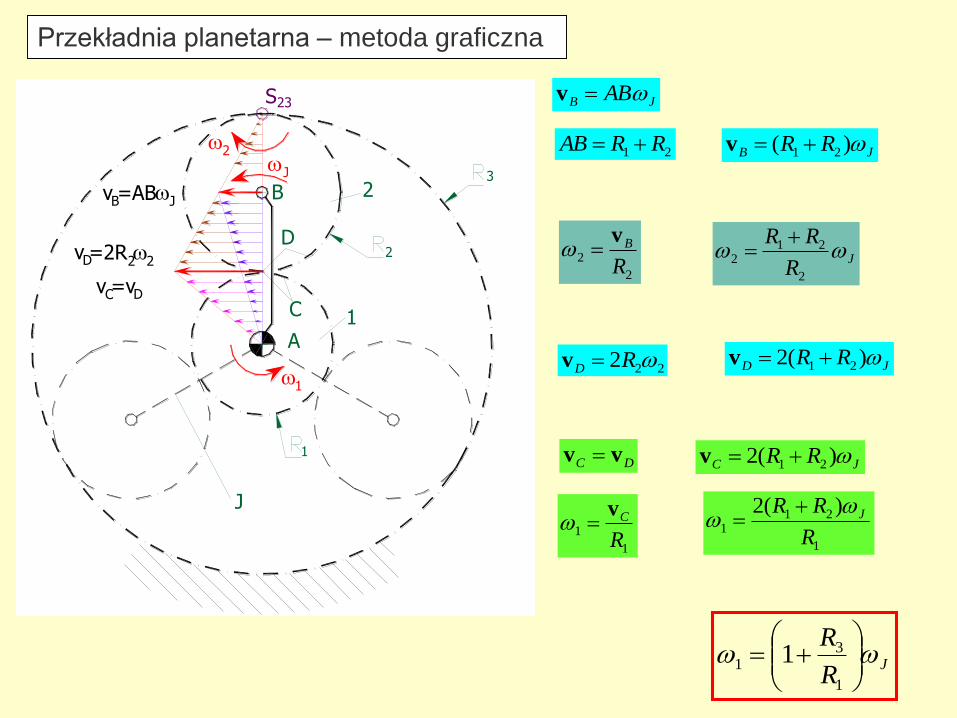
Przekładnia planetarna – metoda graficzna
1
2
J
A
B
2
C
D
1
3
1
2
J
A
B
2
J
C
D
1
3
1
2
J
A
B
2
JvB J=AB
C
D
1
3
1
2
J
A
B
2
JvB J=AB
C
D
1
2
3
S23
1
2
J
A
B
2
JvB J=AB
C
D
1
2
3
S23
2=2RDv 2
1
2
J
A
B
2
JvB J=AB
1
C
D
1
2
3
S23
2=2RDv 2
Cv =vD
JB ABv
21 RRAB
2
2R
Bv
JR
RR
2
212
222 RD v JD RR )(2 21 v
DC vv JC RR )(2 21 v
1
1R
Cv
1
211
)(2
R
RR J
JR
R
1
31 1
JB RR )( 21 v