Mechanika w Lotnictwie -2014-TI-str-1-464

of 464
Transcript of Mechanika w Lotnictwie -2014-TI-str-1-464
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
1/463
POLSKIE TOWARZYSTWO MECHANIKITEORETYCZNEJ I STOSOWANEJ
M E C H A N I K A
W L O T N I C T W I EML-XVI 2014
TOM I
pod redakcj Krzysztofa Sibilskiego
Warszawa 2014
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
2/463
Organizatorzy
Polskie Towarzystwo Mechaniki Teoretycznej i Stosowanej Instytut Inynierii Lotniczej, Procesowej i Maszyn
Energetycznych Politechniki Wrocawskiej Instytut Techniki Lotniczej i Mechaniki StosowanejPolitechniki Warszawskiej
Instytut Lotnictwa w Warszawie Instytut Techniczny Wojsk Lotniczych w Warszawie Wydzia Mechatroniki i Lotnictwa Wojskowej
Akademii Technicznej
Wysza Szkoa Oficerska Si Powietrznych w Dblinie
Komitet Naukowy
Krzysztof Sibilski(Polska) przewodniczcyKrzysztof Arczewski (Polska) * Pawe Artymowicz (Kanada)
Wojciech Blajer (Polska) * Jzef Gacek (Polska)Zdzisaw Gosiewski (Polska) * Jacek Goszczyski (Polska)
Stanisaw Kachel (Polska) * Zbigniew Koruba (Polska)Grzegorz Kowaleczko (Polska) * Adam Kozakiewicz (Polska)
Maciej Lasek (Polska) * Zbigniew Leciejewski (Polska)Edyta adyyska-Kozdra (Polska) * Andrzej Majka (Polska)Arkadiusz Myk (Polska) * Aleksander Olejnik (Polska)
Marek Orkisz (Polska) * Jimoch Pedro (RPA)Jzsef Rohacs (Wgry) * Jerzy Ssiadek (Kanada)
Wiesaw Sobieraj (Polska) * Ryszard Szczepanik (Polska)Cezary Szczepaski (Polska) * Kazimierz Szumaski (Polska)Witold Winiowski (Polska) * Wiesaw Wrblewski (Polska)
Bogdan ak (Polska) * Andrzej yluk (Polska)
ISBN 978-83-932107-3-2
Copyright by Polskie Towarzystwo Mechaniki Teoretycznej i StosowanejWarszawa 2014
Nakad: 180 egz.
Druk: Drukarnia nr 1, ul. Rakowiecka 37, 02-521 Warszawa
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
3/463
Szanowni Czytelnicy!
Z przyjemnoci oddajemy do rk Czytelnikw dwunast, dwutomowmonografi z serii Mechanika w Lotnictwie.
Publikacja zawiera rozszerzone wersje referatw wygoszonych podczasXVI Konferencji Mechanika w Lotnictwie ML-XVI 2014 (KazimierzDolny, 26-29 maja 2014 r.), zakwalifikowane do druku po recenzjach.
Seri wydaje gwny organizator Konferencji Polskie TowarzystwoMechaniki Teoretycznej i Stosowanej.
Konferencje Mechanika w Lotnictwie s organizowane od 1984roku w cyklu dwuletnim i niezmiennie przycigaj liczne grono lotnikw,
uzbrojeniowcw i przedstawicieli pokrewnych dziedzin.Kolejne konferencje oywiay i integroway rodowiska lotnicze insty-
tutw naukowo-badawczych, wyszych uczelni cywilnych i wojskowychoraz przemysu. S one zawsze okazj do wymiany informacjio najnowszych osigniciach naukowych w zakresie konstrukcji, badadowiadczalnych, symulacji numerycznej dynamiki lotu samolotw, rakieti pociskw, ich eksploatacji, jak rwnie bezpieczestwa w locie.
Dzikujc sponsorom za pomoc w wydaniu monografii, wyraamy
nadziej, e i tym razem publikacja spotka si z duym zainteresowaniemi przyczyni si do rozwoju polskiej myli naukowo-technicznej orazzwikszy bezpieczestwo lotw.
Krzysztof Sibilski
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
4/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
5/463
Rozdzia I
Badania eksperymentalne
laboratoryjne i w locie
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
6/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
7/463
Polskie Towarzystwo Mechaniki
Teoretycznej i Stosowanej
MECHANIKA W LOTNICTWIE
ML-XVI 2014
BADANIA W LOCIE SYSTEMU WYWIETLANIAPARAMETRW LOTU
Grzegorz Bczkowski, Jarosaw Krzonkalla, Maj Mordzonek,Stanisaw Rymaszewski, Franciszek ZgrzywaInstytut Techniczny Wojsk Lotniczych, Warszawa
e-mail: [email protected]; [email protected]
Przedmiotem artykuu s badania w locie nowoopracowanego systemuwywietlania parametrw lotu (SWPL). Omawiany system przeznaczo-ny jest do zobrazowania na wywietlaczu przeziernym umieszczonymprzed okiem pilota penej informacji pilotaowo-nawigacyjnej, ostrzega-niu o sytuacji niebezpiecznej na pokadzie migowca oraz sygnaliza-cji bdw pracy systemw pokadowych. System przystosowany jest dopracy w warunkach dziennych i nocnych, przy czym w warunkach noc-nych wsppracuje z goglami noktowizyjnymi stosowanymi w lotnictwieSi Zbrojnych RP. W artykule przedstawiono gwne elementy skado-
we badanego systemu wraz z ich przeznaczeniem i funkcj. Szczegowoopisano zaimplementowane w systemie rodzaje zobrazowania oraz spo-sb i liczba prezentowanych na wywietlaczu przeziernym informacji.Nastpnie omwiono wymagany zakres i rzeczywisty przebieg prb w lo-cie podlegajcego badaniu systemu. Badania realizowano na migowcuMi-17-1V. Na zakoczenie podano wyniki przeprowadzonych bada sys-temu wywietlania parametrw lotu, w szczeglnoci dotyczcych spe-nienia Zaoe Taktyczno-Technicznych na badany system.
1. Wstp
Wzrastajce nieustannie wymagania stawiane przed bojowymi statkamipowietrznymi na wspczesnym polu walki, w tym szczeglnie konieczno pro-wadzenia misji bojowych na bardzo maych wysokociach lotu, zwaszcza w od-niesieniu do migowcw, wymusiy opracowanie nowych systemw informacyj-nych zwikszajcych bezpieczestwo realizacji zada bojowych. W warunkachkrajowych system o takim przeznaczeniu opracowano w Instytucie Technicz-nym Wojsk Lotniczych. Opracowany dla potrzeb zag migowcw typu Mi-17system wywietlania parametrw lotu SWPL-1 zapewnia cig obserwacj
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
8/463
8 G. Bczkowski i inni
otoczenia przy jednoczesnej kontroli parametrw pilotaowo-nawigacyjnychi informacji o stanie migowca, wywietlanych bezporednio przed okiempilota. Opisane w niniejszym artykule badania miay na celu potwierdzeniespenienia przez badany system wymaga zawartych we Wstpnych Zaoe-
niach Taktyczno-Technicznych (WZTT) [1], a tym samym zakadan poprawwiadomoci sytuacyjnej zaogi i zwikszenie bezpieczestwa realizacji zada,i w efekcie celowo wprowadzenia systemu do wyposaenia migowcw typuMi-17.
2. Opis systemu SWPL-1
System wywietlania parametrw lotu SWPL-1 [2] przeznaczony jest dlapilotw migowcw typu Mi-17 w celu umoliwienia prowadzenia cigej ob-serwacji otoczenia przy jednoczesnej kontroli parametrw lotu oraz stanumigowca. Celem zobrazowania pilotom informacji o biecych parametrachpilotaowo-nawigacyjnych, parametrach pracy zespou napdowego, zaistnie-niu sytuacji niebezpiecznych lub te bdach pracy (niesprawnociach) syste-mw migowca, system SWPL-1 zbiera sygnay elektryczne z urzdze poka-dowych, tj. system kursowy, radiowysokociomierz, nadajniki prdkoci kto-wej wirnika i sprarek czy sygnay o niesprawnociach i przetwarza je w uka-
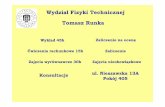
dzie dopasowania sygnaw (rys. 1).Przetworzone do postaci cyfrowej sygnay wraz z danymi pozyskiwanymiz pokadowego odbiornika GPS i nowozabudowanej centrali danych aerody-namicznych przeksztacane s nastpnie przez system w komputerach graficz-nych I i II pilota na zobrazowania graficzne prezentowane ostatecznie w postacicyfrowej, tekstowej oraz charakterystycznych symboli graficznych na wywie-tlaczach przeziernych pilotw (rys. 1). W warunkach dziennych, jak te pod-czas lotw nocnych bez gogli noktowizyjnych do zobrazowania przed okiempilota informacji generowanych przez omawiany system wykorzystywany jest
dzienny wywietlacz nahemowy wykonany jako szybkorozczny modu mon-towany bezporednio na szynie standardowego hemu lotniczego THL-5NVlub THL-5R. Natomiast w lotach nocnych z wykorzystaniem gogli prezentacjainformacji systemu realizowana jest za pomoc nocnego wywietlacza wyko-nanego jako szybkorozczny element systemu montowany bezporednio naobiektywie gogli noktowizyjnych PNL-3, stanowicych standardowe wyposa-enie pilota (rys. 1).
Sterowanie systemem SWPL-1 realizowane jest przy pomocy indywidual-nych pulpitw sterowania umoliwiajcych niezalenie kademu z pilotw nawczenie lub wyczenie jego zobrazowania, zmian jasnoci prezentowanych
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
9/463
Badania w locie systemu wywietlania parametrw lotu 9
Rys. 1. Schemat ideowy systemu SWPL-1
na wywietlaczu informacji, jak te zmian trybu pracy systemu. Ostatniaz podanych funkcji sterujcych wynika z zaimplementowania w systemie trzechrnych rodzajw plansz zobrazowania dostpnych informacji rnicych siliczb informacji oraz zakadanym wykorzystaniem i nazwanych odpowiedniotrybem nawigacyjnym NAV, operacyjnym OPER i trybem awaryjnym AWAR.Sterowanie zmian trybw pracy moliwe jest take za pomoc przecznikwumieszczonych na dwigniach sterowania skokiem i moc (rys. 1). Ponadtopulpit II pilota wyposaono dodatkowo w pokrto korekcji wysokoci baro-metrycznej celem zapewnienia zgodnoci wskaza wysokoci barometrycznejwysokociomierza pokadowego z prezentowanym przez system.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
10/463
10 G. Bczkowski i inni
Tryb nawigacyjny w zaoeniu przeznaczony jest do wykorzystywaniaw tych fazach lotu, w ktrych uwaga pilota skupiona jest gwnie na piloto-waniu i kontroli stanu migowca, a nie na obserwacji otoczenia, a tym samymsystem powinien prezentowa pilotowi moliwie pen dostpn informacj.
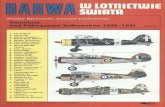
Przykadowy widok zobrazowania na wywietlaczu systemu w trybie NAVi ustawieniach fabrycznych (wywietlane wszystkie 22 dostpne w systemie in-formacje) przedstawiono na rys. 2. Powysza uwaga wynika z faktu, i system
Rys. 2. Przykadowy widok zobrazowania w trybie pracy NAV (ustawieniafabryczne)
umoliwia modyfikacj liczby prezentowanych w omawianym trybie informa-cji poprzez ich dowolne usuwanie z generowanego na wywietlaczu obrazu zawyjtkiem wskaza korekty kta pochylenia i wysokoci barometrycznej, in-formacji o trybie pracy, sygnalizacji niebezpiecznej wysokoci oraz sygnalizacjiostrzegawczej o sytuacji niebezpiecznej lub niesprawnociach. Przykadem ta-kiego realizowanego przez system SWPL-1 zgodnie z potrzebami uytkownikazobrazowania z ograniczon liczb informacji jest opisany poniej tryb OPER.Wracajc do omwienia zamieszczonego na rys. 2 widoku zobrazowania pe-
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
11/463
Badania w locie systemu wywietlania parametrw lotu 11
nej informacji, oczywistym jest, e sygnalizacja niebezpiecznej wysokoci RAwywietlana bdzie jedynie w przypadku wykonywania lotu na wysokoci ni-szej od wartoci ustawionej na radiowysokociomierzu pokadowym. Analo-gicznie pulsujca sygnalizacja ostrzegawcza WARN pojawia si bdzie na
wywietlaczu wycznie w przypadku zaistnienia na migowcu sytuacji niebez-piecznych diagnozowanych przez system pokadowy, za pulsujca sygnalizacjaFAIL w przypadkach wystpienia sygnau o bdach pracy systemw pokado-wych. Z kolei rzeczywiste informacje o czasie biecym, prdkoci podrnej,odlegoci i czasie dolotu do celu oraz biecym i zadanym kursie prezentowa-ne bd na wywietlaczu jedynie przy dziaajcym pokadowym odbiornikuGPS z wprowadzonymi punktami trasy.
Tryb operacyjny pracy systemu SWPL-1 w zaoeniu przeznaczony jest
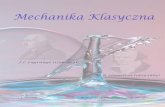
z kolei do obrazowania na wywietlaczu informacji w tych fazach lotu, w kt-rych uwaga pilota powinna by skoncentrowana zarwno na kontroli podstawo-wych parametrw lotu jak i obserwacji otoczenia i nadmierna liczba informa-cji na wywietlaczu nie powinna rozprasza uwagi pilota i ogranicza istotniemoliwoci obserwacji terenu. Przykadem realizacji powyszych zaoe jestprzedstawiony na rys. 3 przykadowy widok zobrazowania w trybie pracy syste-mu OPER. Jak wida, zaprezentowany widok obrazu generowanego na wywie-
Rys. 3. Przykadowy widok zobrazowania w trybie pracy OPER
tlaczu pilota zawiera poza wymaganymi informacjami o wartoci korekty ktapochylenia i wysokoci barometrycznej oraz pojawiajcymi si w momenciewystpienia przyczyny sygnalizacjami ostrzegawczymi RA, WARN lub FAIL
jedynie podstawowe, niezbdne praktycznie do realizacji lotu dane pilotaoweo kursie, pochyleniu i przechyleniu migowca, prdkoci lotu, barometrycznej
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
12/463
12 G. Bczkowski i inni
i radiowej wysokoci lotu oraz prdkoci pionowej i dodatkowo dane o prdkociobrotowej wirnika. W omawianym trybie pracy, analogicznie jak w przypadkutrybu NAV, moliwe jest ustawienie wywietlania wybranych (poza wymaga-nymi) informacji, przy czym liczba i rodzaj danych informacyjnych powinny
odpowiada indywidualnym preferencjom danego pilota i oczywicie rodzajowiwykonywanego zadania.
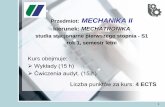
Trzecim i ostatnim z dostpnych w systemie SWPL-1 trybw pracy jestustalony tryb awaryjny AWAR pokazany na rys. 4. Ten tryb pracy charak-teryzuje si tym, e prezentowane s w nim jedynie informacje ostrzegawczedla pilota w formie napisw RA, WARN i FAIL pojawiajce si po zaistnieniuokrelonych zdarze. W pozostaych sytuacjach wywietlacz w tym trybie jestcakowicie pusty, zapewniajc cakowicie niezakcon obserwacj otoczenia.
Pojawienie si na wywietlaczu informacji RA wiadczy o locie na wysoko-ci mniejszej od ustawionej na radiowysokociomierzu. Z kolei pulsujcy przezokres 10 s napis ostrzegawczy WARN informuje o zaistnieniu jednej lub kilkuz 14 obsugiwanych przez pokadowy system ostrzegawczy migowca sytu-acji niebezpiecznych, takich jak: rezerwowa pozostao paliwa, niebezpiecznawysoko, niesprawno instalacji hydraulicznej, poar, przekroczenie obrotwturbin, wzrost temperatury gazw wylotowych, niebezpieczne drgania silni-kw czy wczenie zakresu nadzwyczajnego silnikw. Natomiast pulsujcy nawywietlaczu przez okres 10 s napis ostrzegawczy FAIL informuje o zdiagno-
zowaniu przez system ostrzegawczy migowca bdw pracy jego ukadwpokadowych, takich jak: niesprawno prdnic, niskie cinienie oleju, zanie-czyszczenie filtrw paliwa, opikowanie, niesprawno radiowysokociomierzaczy te podwyszone drgania silnikw.
Rys. 4. Widok zobrazowania w trybie pracy AWAR
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
13/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
14/463
14 G. Bczkowski i inni
Z kolei zakres bada jakoci prezentowania przez badany system informacjiobejmowa sprawdzenie:
moliwoci odczytania penej prezentowanej na wywietlaczu dziennymsystemu SWPL-1 informacji w kadych warunkach owietlenia natural-
nego w dzie, moliwoci odczytania penej prezentowanej na wywietlaczu nocnym
systemu SWPL-1 informacji w warunkach owietlenia naturalnego w no-cy (we wsppracy z goglami noktowizyjnymi typu PNL-3),
moliwoci odczytania penej prezentowanej na wywietlaczu informacjina rnym tle otoczenia (w zakresie jego barwy, intensywnoci i wyst-pujcych kontrastw),
sposobu prezentacji informacji na wywietlaczu systemu SWPL-1,
czy obraz generowany na wywietlaczu jest stabilny, ostry, pozbawionyzakce i drga,
czy informacje na wywietlaczu systemu SWPL-1 prezentowane s w spo-sb cigy (poza informacjami wywietlanymi z zaoenia okresowo),
czy czas cigej pracy systemu jest nie krtszy ni 4 godziny, za wy-magana przerwa pomidzy kolejnymi okresami uytkowania systemu niedusza ni 30 minut.
W zakresie badania ergonomii sterowania systemem realizowano natomiastnastpujce badania sprawdzajce:
czas gotowoci systemu do pracy od momentu jego wczenia, czy system spenia oglne wymagania w zakresie organw sterowania
i strojenia,
czy kady z czonkw zaogi (dowdca oraz drugi pilot) posiada oddzielneelementy sterowania systemem w zakresie wywietlanych dla niego zo-brazowa oraz posiada moliwo niezalenej regulacji i wyboru funkcjisystemu dostpnych z poziomu uytkownika,
czy kady z czonkw zaogi (dowdca i drugi pilot) posiada wygodnydostp do elementw sterujcych systemem,
czy kady z czonkw zaogi (dowdca i drugi pilot) posiada moliwodostosowania (regulacji mechanicznej) systemu do indywidualnych mo-liwoci psychofizycznych,
czy gabaryty lub inne parametry wywietlaczy umoliwiaj zaodze rw-noczenie z systemem wykorzystanie maski tlenowej KM-34D montowa-nej do hemu pilota THL-5NV,
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
15/463
Badania w locie systemu wywietlania parametrw lotu 15
czy sposb mocowania wywietlacza systemu do standardowego hemupilota umoliwia jego atwy monta i demonta,
spenianie przez system SWPL-1 oglnych wymaga ergonomicznych.
W ramach bada w locie wpywu pracy systemu na prac innych systemwmigowca sprawdzono:
czy system bezkolizyjnie wsppracuje z systemami i urzdzeniami mi-gowca, na ktrym jest zabudowany oraz czy uytkowanie i zabudowasystemu na migowcu w aden sposb nie zmniejsza funkcjonalnoci in-nych systemw i urzdze zabudowanych na migowcu,
czy system funkcjonuje normalnie (zgodnie z przeznaczeniem i deklaro-wan niezawodnoci) w warunkach jednoczesnej pracy dowolnego sys-
temu (obiektu) zabudowanego na migowcu, czy system nie zakca pracy jakiegokolwiek innego systemu (obiektu)
zabudowanego na migowcu,
czy wyczenie systemu w dowolnym momencie i trybie pracy nie powo-duje uszkodzenia systemu.
Ostatecznie badania wpywu systemu oraz jego pracy na bezpieczestwouytkowania migowca dotyczyy sprawdzenia:
czy system zabudowany na migowcu oraz jego uytkowanie jest bez-pieczne dla zaogi, obsugi oraz bezpieczestwa lotu statku powietrznego,
czy system prezentuje zobrazowanie w linii wzroku pilota i umoliwiauytkownikowi swobodn obserwacj otoczenia migowca (w zakresiesumarycznego pola widzenia pilota nie mniejszego ni bez uycia syste-mu),
czy rozmiar, sposb i jako zobrazowa przedstawiajcych informacjena wywietlaczu umoliwiaj kontrol zmian tego parametru (dla zobra-zowa cigych) lub przyjcie informacji (dla zobrazowa pojawiajcychsi okresowo) bez koniecznoci skupiania wzroku na danej informacji,
czy czas niezbdny na przyswojenie informacji (przez przeszkolonego pi-lota) nie powoduje sytuacji niebezpiecznych dla procesu sterowania mi-gowcem oraz umoliwia praktyczn obserwacj otoczenia migowca,
czy rozmiar, sposb i jako zobrazowa wywietlanych w danej chwilina wywietlaczu umoliwiaj (przeszkolonemu pilotowi) obserwacj oto-czenia migowca oraz wskanikw i elementw sterowania migowcemznajdujcych si w kabinie zaogi,
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
16/463
16 G. Bczkowski i inni
czy system wsppracuje (umoliwia zamontowanie i nie ogranicza funk-cjonalnoci) z hemami lotniczymi THL-5NV oraz THL-5R,
czy system wsppracuje (prezentuje spjne zobrazowanie, umoliwiamocowanie i nie ogranicza funkcjonalnoci) z goglami noktowizyjnymitypu PNL-3.
4. Przebieg bada w locie systemu SWPL-1
Badania w locie omawianego systemu realizowano na migowcuMi-17-1V nr boczny 6107 z zabudowanym systemem SWPL-1 zgodnie z pro-gramem bada [3], programami lotw prbnych dowiadczalnych [4] oraz meto-
dykami badawczymi [5]-[9] w WZL nr 1 S.A. d w okresie 26.07-20.08.2011 r.Zgodnie z przedstawionym w p. 3. zakresem bada loty badawcze przeprowa-dzano:
o rnych porach doby, tj. w dzie, podczas zachodu Soca, o zmrokuoraz w warunkach nocy jasnej i ciemnej (bezksiycowej),
w rnorodnych warunkach atmosferycznych odpowiadajcych brakowizachmurzenia, czciowemu lub cakowitemu zachmurzeniu i opadowi at-mosferycznemu,
nad terenami o rnorodnej barwie, fakturze i charakterystykach odbiciawiata, tj. akwen wodny, pola uprawne, teren piaszczysty, ka, obszarzalesiony, powierzchnia betonowa, droga asfaltowa, obszar zurbanizowa-ny itp.
W badaniach celem okrelenia obiektywnej oceny speniania przez ba-dany system tych wymaga, ktre podlegay wycznej subiektywnej oceniebadacza, uwarunkowanej jego indywidualnymi cechami psychomotorycznymi
uczestniczyo 4 pilotw dowiadczalnych. Majc na wzgldzie szeroki zakresbada, wymg powtarzania w miar moliwoci poszczeglnych sprawdzeprzez kolejnych pilotw, jak te konieczno opanowania przez pilotw na-wykw uytkowania systemu, w trakcie bada w locie wykonano 48 lotwbadawczych o cznym nalocie 116,7 h, z czego 30% w warunkach nocnychz wykorzystaniem gogli noktowizyjnych. Naley podkreli, i w trakcie badanie wystpiy adne usterki czy niesprawnoci zarwno badanego systemu, jakrwnie migowca, skutkujce nieplanowanymi przerwami w lotach i zreali-zowano peen przewidywany zakres sprawdze lotnych okrelony w programiebada [3]. Wyniki bada w locie systemu przedstawiono skrtowo poniej.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
17/463
Badania w locie systemu wywietlania parametrw lotu 17
5. Wyniki bada w locie systemu SWPL-1
Szczegowy opis wynikw poszczeglnych bada w locie systemu
SWPL-1 oraz ich zgodnoci z wymaganiami przedstawiono w 5 raportach z ba-da [12]-[16], odpowiadajcych 5 gwnym zagadnieniom badawczym okrelo-nym zakresem omawianych prb (patrz p. 3). Zamieszczone w raportach wnio-ski potwierdzaj spenianie przez badany system wszystkich, podlegajcychsprawdzeniu podczas prb w locie, wymogw Wstpnych Zaoe Taktyczno-Technicznych na system zobrazowania [1]. Naley jednak zauway, i w przy-padku kilku z 36 przeprowadzonych bada sprawdzajcych wstpna ocena wy-nikw sprawdze nie bya jednoznacznie pozytywna i wymagaa szczegowejanalizy i waciwej interpretacji.
Jednym z takich niejednoznacznych co do oceny wynikw bada by wy-nik sprawdze moliwoci odczytania penej prezentowanej na wywietlaczusystemu informacji na rnym tle otoczenia w zakresie jego barwy, inten-sywnoci oraz wystpujcych kontrastw. Badania potwierdziy mianowicie,e w zdecydowanej wikszoci sytuacji odczyt penej wywietlanej informacji
jest bezproblemowy pod warunkiem dostosowania jasnoci zobrazowania in-formacji do biecych warunkw owietleniowych i jaskrawoci ta, na ktreskierowany jest aktualnie wzrok pilota. Odczyt informacji moliwy jest nawet
w warunkach intensywnie jaskrawego ta, jak niezachmurzona tarcza sonecznaczy te akwen wodny mocno odbijajcy promienie soneczne przy wykorzysta-niu wizjera (osony przeciwsonecznej) hemu pilota. Utrudnienia w odczycieprzez pilota penej wywietlanej informacji pojawiaj si natomiast w spora-dycznych przypadkach, gdy tem prezentowanej na wywietlaczu informacji sw danym momencie intensywnie kontrastujce ze sob jasnoci powierzchnie.Przykad zaistnienia omawianej sytuacji w warunkach dziennych pokazano narys. 5, na ktrym to wywietlacza stanowi jednoczenie stosunkowo ciemny te-ren oraz mocno rozwietlone niebo i informacje kursowe znajdujce si u gry
wywietlacza (na jasnym tle) s zdecydowanie mao czytelne.Analogiczn co do istoty sytuacj zarejestrowan w warunkach nocnych za-
prezentowano z kolei na rys. 6. W tym przypadku rdo sztucznego wiata,widziane w noktowizorze jako jaskrawa plama (oznaczona na rysunku strza-k), stanowi w danym momencie to graficznego zobrazowania prdkociomie-rza, uniemoliwiajc okrelenie prdkoci lotu migowca. Prba zwikszeniaw takiej sytuacji jasnoci wywietlania informacji, celem poprawy wyrazisto-ci danych znajdujcych si na jasnym tle, powoduje przejaskrawienie i tymsamym pogorszenie odczytu informacji zobrazowanych na ciemniejszym tle.Waciwym sposobem postpowania w opisywanej sytuacji jest chwilowy ruch
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
18/463
18 G. Bczkowski i inni
Rys. 5. Przykadowy widok zobrazowania na wywietlaczu dziennym w warunkach
mocno kontrastowego ta
Rys. 6. Przykadowy widok zobrazowania na wywietlaczu nocnym w warunkachmocno kontrastowego ta
gowy, np. w prezentowanym na rys. 5 przykadzie nieznacznie ku doowi, abywymagane informacje znalazy si na ciemniejszym tle i mogy by bezproble-mowo odczytane. Tym samym, w zgodnej opinii pilotw przeprowadzajcychbadania, analizowane sporadyczne sytuacje nie uniemoliwiaj w razie po-trzeby odczytu penej wywietlanej informacji, a tym samym nie wpywajna bezpieczestwo lotu i nie mog stanowi o negatywnej ocenie omawianegobadania.
Kolejnym z problematycznych do oceny punktw bada by wynik spraw-dze wpywu wywietlanych na wywietlaczu informacji na moliwo swo-bodnej obserwacji przez pilota otoczenia oraz wskanikw i elementw ste-
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
19/463
Badania w locie systemu wywietlania parametrw lotu 19
rowania migowcem. Przeprowadzone badania potwierdziy, e w przypadkuwykorzystywania wywietlacza dziennego rozmiar, sposb oraz jako prezen-towanych zobrazowa umoliwia odpowiedni obserwacj zarwno otoczenia,
jak te wskanikw oraz elementw sterowania. Ewentualny chwilowy zanik
widocznoci niewielkich szczegw terenowych lub elementw zobrazowaniai sterowania znajdujcych si w kabinie migowca, przysonitych w danejchwili prezentowan informacj, pozostaje bez wpywu na moliwo obser-wacji otoczenia, odczyt wskaza i operowanie elementami sterowania, a tymsamym na bezpieczestwo realizacji lotu czy zdolnoci wykonywania zadania.
Loty nocne z wykorzystaniem wywietlacza nocnego potwierdziy nato-miast, e moliwo waciwej obserwacji otoczenia jest w istotnym stopniuuwarunkowana liczb prezentowanych na wywietlaczu informacji. Wynika to
z faktu, e wywietlana informacja musi by celem jej uwidocznienia wyra-nie janiejsza ni to, co w warunkach sabego owietlenia upoledza zdolnooka ludzkiego do wyranego widzenia szczegw zdecydowanie ciemniejsze-go otoczenia migowca, bdcego tem dla prezentowanej na wywietlaczunocnym informacji. W konsekwencji, zdaniem pilotw realizujcych loty ba-dawcze, podczas wykonywania lotw nocnych na maych wysokociach zalecasi bezwzgldnie stosowanie zakadanego do takich celw trybu pracy systemuOPER z moliwie ograniczon liczb wywietlanych informacji, celem zapew-nienia odpowiednio wczesnego wykrycia potencjalnych przeszkd terenowych
znajdujcych si na kursie lotu migowca, a tym samym bezpiecznego pro-wadzenia lotu. Natomiast obserwacja wskanikw oraz elementw sterowaniamigowcem jest moliwa i jedynie nieznacznie utrudniona przez informacjeprezentowane na wywietlaczu nocnym, naley jednak mie na wzgldzie, eprowadzenie omawianej obserwacji jest praktycznie moliwe dopiero po do-stosowaniu jasnoci zobrazowa wywietlacza i przestawieniu ostroci goglinoktowizyjnych z nieskoczonoci na waciw do obserwacji wyposaenia ka-biny.
Koczc omwienie wynikw bada w locie systemu, naley wspomnieo wynikach bada dotyczcych wpywu zabudowy i uytkowania badanego sys-temu na bezpieczestwo zaogi, obsugi oraz lotu migowca. Jedyn zgoszonprzez pilotw uwag w omawianym aspekcie badawczym byo niezbyt fortunneumiejscowienie zcz podczenia wywietlaczy systemu do pokadowego sys-temu zobrazowania, powodujce konieczno uycia znacznej dugoci okablo-wania wywietlaczy. Nadmierna masa okablowania, w zgodnej opinii pilotw,skutkuje po ok. 2 h lotu narastajcymi symptomami zmczenia, szczeglniepodczas lotw z goglami noktowizyjnymi (ze wzgldu na dodatkow mas ob-ciajc gow), majcymi wpyw na bezpieczestwo pilotowania. Ponadto
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
20/463
20 G. Bczkowski i inni
przebieg okablowania spowodowany umiejscowieniem zcz moe w trakcie lo-tu stwarza sytuacje (w badaniach nie wystpiy) potencjalnie zagraajcebezpieczestwu lotu migowca lub zaogi poprzez:
ograniczenie lub wrcz uniemoliwienie poruszania przez dowdc zao-gi gow wskutek przycicia si okablowania wywietlacza pomidzytuowiem i fotelem,
ograniczenie lub uniemoliwienie poruszania gow bd te utrudnie-nia (ograniczenia) w moliwoci sterowania dwigni skoku i mocy lubdwigniami indywidualnego sterowania silnikami przez dowdc zaogiwskutek zapltania si okablowania wywietlacza o wspomniane elemen-ty sterowania zespou napdowego.
Majc na wzgldzie powysze zastrzeenia, producent zdecydowa o zmianie
umiejscowienia zcz i skrceniu dugoci okablowania wywietlaczy, eliminu-jce zgoszone niedogodnoci i potencjalne zagroenia.
6. Wnioski z bada systemu SWPL-1
Wyniki przeprowadzonych bada sprawdzajcych systemu SWPL-1 zabu-dowanego na migowcu Mi-17-1V potwierdziy spenianie przez badany sys-tem wymaga zawartych we Wstpnych Zaoeniach Taktyczno-Technicznych
na system zobrazowania parametrw lotu. Ponadto, w zgodnej opinii pilotwdowiadczalnych wykonujcych loty badawcze, badania jednoznacznie wyka-zay, e badany system poprzez:
wywietlanie parametrw lotu w polu widzenia pilotw, wywietlanie informacji o niesprawnociach i zagroeniach w polu widze-
nia pilotw,
a tym samym moliwo jednoczesnej obserwacji otoczenia migowca orazinformacji o jego parametrach lotu i stanie zarwno w warunkach dziennych
i nocnych, jak te dziki: moliwoci swobodnego doboru zestawu zobrazowywanych informacji, niezalenemu zobrazowaniu i sterowaniu systemem dla obu pilotw, cigemu monitorowaniu stanu sprawnoci systemu,
zapewnia oczekiwan popraw wiadomoci sytuacyjnej zaogi migowcai w rezultacie zwiksza bezpieczestwo wykonywania lotw, szczeglnie lotwprowadzonych na skrajnie maych wysokociach.
Podsumowujc, uzyskane pozytywne wyniki bada systemu wywietlaniaparametrw lotu SWPL-1 potwierdzaj celowo wdroenia tego systemu nawyposaenie migowcw typu Mi-17 eksploatowanych w Lotnictwie SZ RP.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
21/463
Badania w locie systemu wywietlania parametrw lotu 21
Bibliografia
1. Wstpne Zaoenia Taktyczno-Techniczne na system zobrazowania parametrwlotu dla migowca typu Mi-17 nr postpowania przetargowego DZSZ/123/V-
31/UZ/PRZ/ PPO/D/20102. Opis techniczny i instrukcja eksploatacji nr 49/43/2009 systemu wywietlania
parametrw lotu, Warszawa 2009
3. Praca zbiorowa, Program bada nr PB-1/LBSP/11. Badania systemu zobra-zowania parametrw lotu SWPL-1 zabudowanego na migowcu Mi-17-1V nazgodno z wymaganiami okrelonymi w WZTT. Badania naziemne i w locie,BT ITWL nr 7172/50, Warszawa 2011
4. Praca zbiorowa,Programy lotw prbnych dowiadczalnych systemu zobrazowa-
nia parametrw lotu SWPL-1 zabudowanego na migowcu Mi-17-1V do pro-gramu bada nr PB-1/LBSP/11, BT ITWL nr 6774/50, Warszawa 2011
5. Praca zbiorowa, Metodyka badawcza nr MB-12/L/LBSP/11. Badanie wpywusystemu zobrazowania parametrw lotu oraz jego pracy na bezpieczestwo uyt-kowania statku powietrznego, BT ITWL nr 6384/50, Warszawa 2011
6. Praca zbiorowa, Metodyka badawcza nr MB-13/L/LBSP/11. Badanie jakociprezentowania informacji przez system zobrazowania parametrw lotu dla statkupowietrznego, BT ITWL nr 6385/50, Warszawa 2011
7. Praca zbiorowa, Metodyka badawcza nr MB-14/L/LBSP/11. Badanie ilociprezentowanych informacji przez system zobrazowania parametrw lotu dla stat-ku powietrznego, BT ITWL nr 6386/50, Warszawa 2011
8. Praca zbiorowa,Metodyka badawcza nr MB-15/L/LBSP/11. Badanie funkcjo-nalnoci i ergonomii sterowania systemu zobrazowania parametrw lotu dla stat-ku powietrznego, BT ITWL nr 6387/50, Warszawa 2011
9. Praca zbiorowa, Metodyka badawcza nr MB-16/L/LBSP/11. Badanie wpywupracy systemu zobrazowania parametrw lotu dla statku powietrznego na pracinnych systemw, BT ITWL nr 6388/50, Warszawa 2011
10. Instrukcja organizacji lotw prbnych w lotnictwie Si Zbrojnych Rzeczypospo-litej Polskiej (IOLP-2010), Sygn. WLOP 444/2010
11. Regulamin lotw lotnictwa Si Zbrojnych RP (RL-2010), Sygn. WLOP 442/2010
12. Praca zbiorowa,Raport z bada NR 9L/LBSP/2012. Badanie wpywu systemuSWPL-1 i jego pracy na bezpieczestwo uytkowania migowca M-17-1V, BTITWL nr 7271/50, Warszawa 2012
13. Praca zbiorowa,Raport z bada NR 10L/LBSP/2012. Badanie jakoci prezen-
towania informacji przez system SWPL-1 dla migowca M-17-1V, BT ITWLnr 7222/50, Warszawa 2012
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
22/463
22 G. Bczkowski i inni
14. Praca zbiorowa,Raport z bada NR 11L/LBSP/2012. Badanie iloci prezento-wanych informacji przez system SWPL-1 zabudowany na migowcu M-17-1V,BT ITWL nr 7223/50, Warszawa 2012
15. Praca zbiorowa, Raport z bada NR 12L/LBSP/2012. Badanie ergonomii ste-
rowania systemem SWPL-1 zabudowanym na migowcu M-17-1V, BT ITWLnr 7224/50, Warszawa 2012
16. Praca zbiorowa, Raport z bada NR 13L/LBSP/2012. Badanie wpywu pracysystemu SWPL-1 na prac innych systemw migowca M-17-1V, BT ITWL nr7225/50, Warszawa 2012
Flight tests of helmet mounted display system
Abstract
This article presents flight tests of a newly developed Helmet Mounted DisplaySystem of Flight Parameters (SWPL). The presented system is designed to illustratefull piloting and navigational information, warning about emergency on the helicopterboard and signaling on-board helicopter systems failures on the translucent display.The system is designed to work in day and night conditions. In night conditions, thesystem cooperates with night vision goggles applicable in Polish Air Force. The articlepresents the main components of the tested system along with their purpose and
function. It describes in detail the implemented system and method of display typesand the amount of displayed information. The article discusses the required range andthe actual course of the flight tests of that system. The tests have been conductedon a helicopter Mi-17-1V. The results of the flight tests of Helmet Mounted DisplaySystem are given in conclusion, in particular on meeting the tactical and technicalrequirements to the system.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
23/463
Polskie Towarzystwo Mechaniki
Teoretycznej i Stosowanej
MECHANIKA W LOTNICTWIE
ML-XVI 2014
WYBRANE ZAGADNIENIA PROGRAMU BADA MODELUSAMOLOTU W UKADZIE POCZONYCH SKRZYDE
Cezary Galiski, Grzegorz Krysztofiak, Mateusz LisInstytut Lotnictwa, Warszawa; e-mail: [email protected]
Miosz KalinowskiPolitechnika Warszawska
ukasz StefanekMSP, Warszawa
Jarosaw HajdukInstytut Techniczny Wojsk Lotniczych, Warszawa
Ukad poczonych skrzyde jest jednym z perspektywicznych ukadwaerodynamicznych przyszych samolotw. Zaproponowany zosta w 1924roku przez Prandtla. Nie zdoby jednak popularnoci ze wzgldu nakomplikacje projektowe wynikajce z silnego sprzenia aerodynamicz-
nego oraz statycznej niewyznaczalnoci. Obecnie przeszkody te mogby pokonane dziki zastosowaniu metod numerycznych. Niniejszy arty-ku prezentuje wybrane wyniki uzyskane w projekcie budowy latajce-go demonstratora tego ukadu. Zaprojektowano go w rzadko stosowanejkonfiguracji z przednim patem w ukadzie grnopata i tylnym w uka-dzie dolnopata. Moe to pozwoli na uniknicie problemw zwizanychz interferencj patw na duych ktach natarcia.
1. Wstp
Ukad poczonych skrzyde zosta zaproponowany po raz pierwszy przezPrandtla w 1924 roku [1]. Skada si on z dwch patw nonych, poczonychkocwkami lub pytami brzegowymi, rozmieszczonymi w przestrzeni w takisposb, aby moliwe byo uzyskanie rwnowagi i statecznoci patowca bezkoniecznoci stosowania usterzenia poziomego. Ma on potencjalnie wiele zalet,takich jak mniejszy opr indukowany czy mniejsza masa struktury. Jednak-e stwarza rwnie wiele problemw projektowych wywoanych nadzwyczajsilnym sprzeniem aerodynamicznym [2] patw oraz ich statyczn niewyzna-czalnoci. Z powodu wymienionych problemw ukad ten nie sta si dotd
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
24/463
24 C. Galiski i inni
popularny wrd projektantw lotniczych. Podjto tylko nieliczne prby zapro-jektowania takiego samolotu metodami analityczno-eksperymentalnymi [3]-[7].Pojawienie si metod numerycznych skonio badaczy do podjcia prb pro-
jektowania samolotw w niekonwencjonalnych ukadach [8]-[11], w tym rw-
nie wywodzcych si z tradycyjnych dwupatw. Dokonano wic dokadniej-szej analizy ukadu poczonych skrzyde [12]-[19]. Metody CFD pozwalajanalizowa skomplikowane ukady aerodynamiczne. Metody MES uatwiajanalizowanie struktur statycznie niewyznaczalnych, a zastosowanie obrabia-rek sterowanych numerycznie redukuje niedokadnoci ich wykonania, dzikiczemu malej naprenia montaowe. W zwizku z tym badacze coraz cz-ciej interesuj si tym ukadem, co objawia si licznymi publikacjami prezen-tujcymi wyniki ich bada [20]-[27]. Przewaa opinia, e bilans wad i zaletukadu nie uzasadnia jeszcze podejmowania duych programw, np. budowysamolotw pasaerskich w tym ukadzie. Badania zrealizowane na Politech-nice Warszawskiej na przeomie lat 80. i 90. ubiegego wieku potwierdziy topini. Pozwoliy jednak wykry istotn prawidowo, ktra moe j zmieni.Okazuje si, e prawie wszystkie projekty badawcze dotyczce ukadu po-czonych skrzyde dotycz takiej ich konfiguracji, w ktrej przedni pat zamo-cowany jest pod kadubem, a tylny nad nim. Przeprowadzone na PolitechniceWarszawskiej badania tunelowe wykazay, e w tej konfiguracji najwiksz do-skonao uzyskuje si w locie odwrconym [7]. Jest to najprawdopodobniej
spowodowane faktem, e wraz ze wzrostem kta natarcia pionowa odlegopomidzy patami maleje, co redukuje aerodynamiczn efektywno tylnegopata akurat w takim zakresie ktw natarcia, w ktrym powinny objawiasi zalety aerodynamiczne ukadu. Podjto wic prb zaprojektowania samo-lotu w odwrotnym ukadzie, tzn. z przednim patem nad kadubem i tylnympod kadubem. Powinno to pozwoli na wzrost efektywnoci tylnego pataw zakresie duych ktw natarcia, a wic rwnie na maksymalne wykorzy-stanie zalet ukadu. Wstpne analizy potwierdziy t tez [27]. Podjto wicrealizacj wikszego projektu, majcego na celu dokadniejsze zbadanie wa-
ciwoci samolotu w tej konfiguracji [28], [29]. W jego ramach prowadzones analizy CFD, dokonano aerodynamicznej optymalizacji multikryterialnejoraz przygotowuje si oprogramowanie do optymalizacji multidyscyplinarnej.Skonstruowano te i zbudowano dwa modele, z ktrych pierwszy (mniejszy)wykorzystano do wstpnych bada w locie, natomiast drugi (wikszy) zba-dano w tunelu aerodynamicznym. Drugi model przygotowywany jest obecniedo pierwszych prb w locie. W celu przygotowania ich programu prowadzo-ne s analizy osigw i dynamiki lotu tego modelu. Wykorzystuje si rwnie
rezultaty wczeniejszych projektw tego rodzaju [30]-[33].
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
25/463
Wybrane zagadnienia programu bada modelu samolotu... 25
Niniejszy artyku zaprezentuje wybrane wyniki wymienionych powyejprac.
2. Badania wstpne
W celu zmniejszenia ryzyka zwizanego z projektem i badaniami samolotuw niekonwencjonalnym ukadzie, przed przystpieniem do projektowania wa-ciwego demonstratora zbudowano jego niewielki model latajcy. Geometriatego modelu oparta bya o wyniki prac przedstawionych w [27]. Model miamas 1,1 kg i rozpito 1200 mm.
Rys. 1. Model latajcy przeznaczony do bada wstpnych demonstratora samolotuw ukadzie poczonych skrzyde
Oblot modelu wykaza poprawne waciwoci lotne modelu. Pozwoli rw-nie na przeprowadzenie kilku eksperymentw, istotnych dla rozwoju waci-wego demonstratora. Pierwszym z nich byy badania poprzecznej statecznocidynamicznej modelu. Stosunkowo krtki kadub i skomplikowana kombina-cja skosw i wzniosw skrzyde sugeroway moliwo wystpienia problemww tym zakresie. W zwizku z tym pocztkowo zastosowano w modelu due,
trapezowe pyty brzegowe, czce kocwki pata przedniego i tylnego. Wynikoblotu pozwoli na zredukowanie ich powierzchni. Dokonano tego w kilku kolej-nych lotach, zmieniajc ich powierzchni stopniowo. Na pytach byy rwniezamontowane oporowe stery kierunku. Wychylay si one tylko na zewntrz,tzn. lewy w lewo, a prawy w prawo. W trakcie redukcji pyt brzegowych zredu-kowano rwnie powierzchni sterw. W ostatecznej konfiguracji samolot miarwnolegoboczne pyty brzegowe oraz centralny statecznik pionowy ze steremkierunku. W trakcie tego eksperymentu nie stwierdzono adnych negatywnychzmian towarzyszcych redukcji powierzchni pyt brzegowych i sterw kierun-ku. Zaobserwowano natomiast wzrost doskonaoci aerodynamicznej modelu.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
26/463
26 C. Galiski i inni
Podjto wic decyzj o zastosowaniu takiej samej konfiguracji pyt brzegowych,statecznika pionowego i steru kierunku w docelowym demonstratorze.
Na maym modelu eksperymentowano rwnie z rnymi kombinacjamiwychyle klap, lotek i sterw wysokoci. Byo to moliwe dziki wyposaeniu
modelu w cztery powierzchnie sterowe na przednim pacie i cztery na tyl-nym. Szczeglnie interesujca okazaa si konfiguracja wykorzystujca przed-nie wewntrzne powierzchnie sterowe w charakterze steru wysokoci. Pozwa-laa ona bowiem zwiksza doskonao modelu wraz ze spadkiem prdkocilotu. Niestety nie pozwalaa ona uzyska duych katw natarcia. Ostateczniewic postanowiono w dalszej czci projektu rozwaa bardziej konwencjonal-ne rozwizanie, ze sterem wysokoci na caej krawdzi spywu tylnego pata.Natomiast przednie wewntrzne powierzchnie sterowe traktowa jako klapyprdkociowe. Przednie zewntrzne powierzchnie przeznaczono na konwencjo-nalne lotki.
Wicej informacji na ten temat znale mona w [29].
3. Projekt demonstratora
Projektowanie demonstratora rozpoczto od przeprowadzenia szeregu ana-
liz aerodynamicznych i wielokryterialnej optymalizacji aerodynamicznej. Wy-korzystywano w tym celu zarwno oprogramowanie komercyjne, jak i wasne[34]-[37]. Zwikszono rozpito skrzyde do okoo 3m, zachowujc geome-tri patw w zakresie skosw, wzniosw, zbienoci i proporcji powierzch-ni nonych z poprzedniego modelu. Dziki temu od samego pocztku znanebyo prawidowe pooenie rodka masy samolotu. Ograniczyo to znaczcoliczb zmiennych optymalizacyjnych i skrcio czas potrzebny dla dokonanianiezbdnych analiz. Skoncentrowano si natomiast na doborze profili i skr-ce wszystkich powierzchni, wcznie z pytami brzegowymi oraz promieni
przej pomidzy poszczeglnymi powierzchniami. Dono przy tym do zmak-symalizowania funkcji energetycznej, jako e ta osiga swoje maksimum dlawikszych ktw natarcia ni doskonao, a wanie na duych ktach na-tarcia oczekiwano najwikszych moliwoci poprawy osigw w stosunku dosamolotw konwencjonalnych. W efekcie oczekuje si wikszego wznoszeniai dugotrwaoci lotu, ktre s wane dla patrolowych samolotw bezzaogo-wych. W przyszoci warto by powtrzy proces optymalizacji z wiksz liczbzmiennych, przynajmniej w zakresie zbienoci patw nonych. Powinno topozwoli na dalsz popraw osigw samolotu, aczkolwiek uzyskane obecnie
ju s satysfakcjonujce.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
27/463
Wybrane zagadnienia programu bada modelu samolotu... 27
Oprcz osigw demonstratora badano rwnie jego obcienia. Byo toniezwykle istotne, gdy planowano prowadzenie zarwno bada w tunelu ae-rodynamicznym, jak i bada w locie na tym samym patowcu. Niestety ob-cienia w tunelu aerodynamicznym s znacznie wiksze ni w locie. W locie
samolot reaguje w sposb dynamiczny na pojawiajce si wymuszenia aerody-namiczne, co agodzi przebieg oddziaujcych na obcie. W tunelu nato-miast model pozostaje nieruchomy, niezalenie od oddziaywujcych na si.Co gorsza, w tunelu moliwe jest uzyskanie rwnie takich konfiguracji ktanatarcia, lizgu i wychyle sterw, ktre s nieosigalne w locie, a mog okazasi wymiarujce. Z drugiej strony okazao si, e po przyjciu rozmiarw de-monstratora pasujcych do przestrzeni pomiarowej 5-metrowego tunelu aero-dynamicznego Instytutu lotnictwa, struktura modelu w wikszoci przypadkwzwymiarowana zostaa nie przez obcienia, a przez gramatury dostpnych narynku materiaw, z ktrych miaa zosta wykonana. Oznacza to, e zapro-
jektowana struktura samolotu jest najlejsz moliw do osignicia w chwiliobecnej. Uwzgldnienie samych tylko obcie w locie do jej wymiarowanianie pozwolioby na zmniejszenie jej masy.
4. Struktura
W konstrukcji demonstratora wykorzystano gwnie struktury przekad-kowe z rdzeniem piankowym i okadzinami z kompozytu epoksydowego zbro-jonego tkaninami wglowymi. W skrzydach zastosowano dwigary z pasamirozmytymi. Przednie i tylne skrzydo mocowane s do kaduba za pomocczterech pionowych rub kade. Pyty brzegowe cz si ze skrzydami przypomocy dwch rub przypadajcych na kade poczenie, przy czym rubysu gwnie do docignicia pyt do eber zamykajcych skrzyda. ebra tezaopatrzone s w przetoczenia o ksztacie graniastosupa pasujce do odpo-wiadajcych im przetocze w ebrach zamykajcych pyty. Dziki temu siy
dziaajce na poczenie w paszczynie pionowej przenoszone s nie przezruby, a przez struktur eber. Uzyskano w ten sposb sztywn struktur wie-lokrotnie statycznie niewyznaczaln. W konstrukcji kaduba istotnym proble-mem okazaa si konieczno zamontowania wagi aerodynamicznej wewntrzsamolotu. Wybrana waga ma znaczce wymiary w porwnaniu z wymiaramidemonstratora, zajmuje wic duo miejsca w jego kadubie. Co gorsza, musiby zamocowana w pobliu rodka masy, koliduje wic z elementami strukturywspierajcymi podwozie gwne samolotu. Problem ten rozwizano, stosujcatrap podwozia do bada w tunelu aerodynamicznym. Po ich zakoczeniuwklejona zostaa dodatkowa wrga, do ktrej mocowana jest sprysta gole
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
28/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
29/463
Wybrane zagadnienia programu bada modelu samolotu... 29
i wytrzymaoci patowca. Obydwa rodzaje analiz prowadzi si niestety przyuyciu rnych siatek obliczeniowych, co powoduje konieczno transferu da-nych zawierajcych obcienia z moduu aerodynamicznego do wytrzymao-ciowego. Komplikuje to i tak skomplikowany automatyczny generator geome-
trii. Wszystko to sprawia, e zadanie multidyscyplinarnej optymalizacji samo-lotu w ukadzie poczonych skrzyde jest niezwykle skomplikowane. Z tegote wzgldu podjto dwie, niezalene prby stworzenia oprogramowania opty-malizacyjnego. Obydwie s obecnie w trakcie realizacji. Jedn z nich zapre-zentowano w [28].
6. Badania aerodynamiczne
Weryfikacja oblicze aerodynamicznych zostanie dokonana na podstawiewynikw bada w tunelach aerodynamicznych, jakie przeprowadzono na obec-nym demonstratorze i jego podzespoach. Badania te rozpoczto od pomiaruwaciwoci zespou napdowego. Jednym z problemw obecnego demonstrato-ra jest bowiem pchajcy ukad napdowy. Zosta on zastosowany, gdy demon-strator jest rwnie modelem przyszego samolotu zaogowego, ktrego budowazostanie podjta, o ile wyniki bada demonstratora oka si satysfakcjonu-
jce. W przypadku samolotu zaogowego nadzwyczaj istotnym zagadnieniem
jest widoczno z kabiny pilota. Zakadajc, e przedni pat ma by w ukadziegrnopata, oznacza to konieczno wysunicia kabiny pilota pod jego krawdnatarcia. Z kolei dua powierzchnia tylnego skrzyda oznacza, e punkt neu-tralny statecznoci znajduje si pomidzy patami nonymi. Z punktu widzeniaosigw jest to korzystne, gdy obydwa paty mog wytwarza dodatni sinon w bardzo szerokim zakresie ktw natarcia. Utrudnia to jednak zabu-dow zespou napdowego. Zainstalowanie go przed kabin spowodowaobyosignicie zbyt duego zapasu statecznoci i zbyt ma sterowno samolo-tu. Konieczne wic stao si zastosowanie ukadu pchajcego, w ktrym silnik
rwnoway mas pilota wzgldem podanego rodka masy samolotu. Ograni-cza to jednak rednic miga, gdy w trakcie rotacji przy starcie i ldowaniumogoby ono zaczepia o powierzchni pasa startowego. Wydawao si wic,e korzystnym moe si okaza zastosowanie miga otunelowanego, w kt-rym opaty s dodatkowo chronione przez otaczajcy je piercie. Krytycz-nym zagadnieniem jest jednak w tym wypadku interferencja ukadu piercie-wentylator ze znajdujcym si przed nimi kadubem i tylnym patem. Z tegote wzgldu badania tunelowe rozpoczto od zweryfikowania waciwoci tylnejczci samolotu z rnymi konfiguracjami napdu. Ich wyniki szczegowo opi-sano w [38]-[40]. Po zapoznaniu si z nimi zdecydowano, e napd otunelowany
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
30/463
30 C. Galiski i inni
wymaga jeszcze dopracowania. Dalsze badania samolotu, poprzedzajce bada-nia w locie, zrealizowano z napdem wyposaonym w konwencjonalne migo.
Rys. 3. Model tylnej czci kaduba z zespoem napdowym w tuneluaerodynamicznym
Badania tunelowe modelu samolotu zawieray kilka eksperymentw. Roz-poczy si od bada zespou napdowego, w celu porwnania wynikw po-
miarw dla tylnej czci samolotu z wynikami caego samolotu. Nastpnie zre-alizowano pomiary biegunowej rwnowagi z napdem i w locie lizgowym przyzaoeniu sterowania przednimi lub tylnymi powierzchniami sterowymi. Zba-dano te kilka przypadkw, w ktrych wychylone byy zarwno przednie, jaki tylne powierzchnie sterowe. Nastpnie przeprowadzono badania waciwocimodelu przy rnych ktach lizgu, w konfiguracji gadkiej oraz z wychylonymilotkami lub sterem kierunku. Pomiary te s niezbdne w celu zasymulowaniazachowania si samolotu w trakcie wykonywania zakrtw.
We wszystkich tych przypadkach migo pozostawao zainstalowane na wa-
le silnika, nawet w przypadkach badania lotu lizgowego. Pozwolio to odwzoro-wa charakterystyk aerodynamiczn samolotu, jaka wystpi w rzeczywistychbadaniach w locie,w trakcie podchodzenia do ldowania. Na koniec, w celachporwnawczych przeprowadzono badania charakterystyk samolotu bez migadla kilku wychyle sterw. Stwierdzono, e doskonao aerodynamiczna bada-nego modelu jest porwnywalna z doskonaoci dobrze dopracowanych samo-lotw konwencjonalnych ze schowanym podwoziem. Wynik ten naley uznaza satysfakcjonujcy na obecnym etapie bada, zwaszcza e badany samolotnie by optymalizowany pod ktem uzyskania duej doskonaoci, a ponad tow trakcie omawianych pomiarw mia zainstalowane atrapy podwozia. W celu
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
31/463
Wybrane zagadnienia programu bada modelu samolotu... 31
zbadania wpywu podwozia na osigi samolotu zdemontowano wic atrapyi powtrzono badania. Nie stwierdzono jednak znaczcego wzrostu osigw.Moe to wynika ze stosunkowo niskiej liczby Reynoldsa, przy ktrej prowa-dzono badania. Ze wzgldu bowiem na wytrzymao modelu i zakres wa-
gi aerodynamicznej wszystkie pomiary realizowano przy prdkoci strumieniaograniczonej do 25 m/s. Po zakoczeniu bada w locie planuje si zrealizowakolejn sesj pomiarw w tunelu aerodynamicznym, w trakcie ktrej dla przy-padkw symetrycznych przeprowadzi si badania w szerszym zakresie prd-koci strumienia. Bdzie to moliwe, gdy najwiksze obcienia w trakciepomiarw wystpuj w konfiguracji niesymetrycznej, a ponad to znajomocharakterystyk z poprzednich bada pozwoli lepiej wykorzysta zakres pomia-rowy wagi i zapas wytrzymaoci modelu.
Rys. 4. Model latajcy przeznaczony do bada w locie w trakcie pomiarw w tunelu
aerodynamicznym
7. Wnioski
Podjto prb zaprojektowania i przebadania demonstratora samolotuw ukadzie poczonych skrzyde. Program zawiera szereg prac, poczwszyod analiz aerodynamicznych, multikryterialnej optymalizacji aerodynamicz-nej, optymalizacji multidyscyplinarnej, projektu i wykonania patowca, przezbadania w tunelu aerodynamicznym a po badania w locie. Osignite do-tychczas wyniki s satysfakcjonujce. Samolot, majc podwozie stae, ma cha-
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
32/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
33/463
Wybrane zagadnienia programu bada modelu samolotu... 33
6. Danilecki S., 1988, Zamknite skrzydo zalety i wady (II), Technika Lotniczai Astronautyczna,10, 8-10.
7. Galinski C., 1992, Results of testing of models of joined-wing utility classaircraft, SAE Paper No. 921013
8. Goraj Z. 2000, Dynamics of high altitude long endurance UAV, Proceedingsof the ICAS Congress 2000, England Harrogate,362, 10pp.
9. Goraj Z., Ueda T., 2000, Ultra light wing structure for high altitude longendurance UAV, Proceedings of the ICAS Congress 2000, England Harrogate,362, 10pp.
10. Goraj Z., 2000, Design and flight dynamics of a HALE UAV HARVE-2,Workshop for the Advancement of Unmanned Air Vehicles (UAVs) for CivilianCommercial Applications, Paper no. 9, Israel Aircraft Industries, Israel
11. Goraj Z., Frydrychewicz A., Winiecki J., 1999, Design concept of a highaltitude long endurance unmanned aerial vehicle, Aircraft Design An Inter-national Journal,2, 1, 19-44
12. Fairchild Samuels M., 1982, Structural weight comparison of a joined wingand a conventional wing, Journal of Aircraft,19, 6, 485-491
13. Wolkovitch J., 1986, The joined wing An overview, Journal of Aircraft,23, 3, 161-178
14. Miura H., Shyu A., Wolkovitch J., 1988, Parametric weight evaluation ofjoined wings by structural optimization,Journal of Aircraft,25, 12, 1142-1149
15. Hajela P., Chen J.L., 1988, Preliminary weight estimation of conventionaland joined wings using equivalent beam models, Journal of Aircraft, 25, 6,574-576
16. Kroo I., Gallman J., 1991, Aerodynamic and structural studies of joinedwing aircraft,Journal of Aircraft,28, 1, 74-81
17. Burkhalter J.E., Spring D.J., Key M.K., 1992, Downwash for joined-wing
airframe with control surface deflections,Journal of Aircraft,29, 3, 458-46418. Gallman J.W., Smith S.C., Kroo I.M., 1993, Optimization of joined-wing
aircraft, Journal of Aircraft,30, 6, 897-905
19. Gallman J.W., 1996, Structural optimization for joined-wing synthesis, Jo-urnal of Aircraft,33, 1, 214-223
20. Blair M., Canfield R., Roberts R., 2005, Joined-wing aeroelastic designwith geometric nonlinearity,Journal of Aircraft,42, 4, 832-848
21. Rasmussen C., Canfield R., Blair M., 2006, Joined-wing sensor-craft con-figuration design,Journal of Aircraft,43, 5, 1470-1478
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
34/463
34 C. Galiski i inni
22. Kim Y.I., Park G.J., Kolonay R.M., Blair M., Canfield R.A., 2008,Nonlinear response structural optimization of a joined wing using equivalentloads, AIAA Journal,46, 11, 2703-2713
23. Bond V., Canfield R., da Luz Madruga Santos Matos M., Suleman
A., Blair M., 2010, Joined-wing wind-tunnel test for longitudinal control viaaftwing twist, Journal of Aircraft,47, 5, 1481-1489
24. Jansen P., Perez R., Martins J., 2010, Aerostructural optimization of non-planar lifting surfaces, Journal of Aircraft,47, 5, 1490-1503
25. Paletta N., Belardo M., Pecora M., 2010, Load alleviation on a joined-wing unmanned aircraft,Journal of Aircraft,47, 6, 2005-2016
26. Bindolino G., Ghiringhelli G., Ricci S., Terraneo M., 2010, Multilevelstructural optimization for preliminary wing-box weight estimation,Journal of
Aircraft,47, 2, 475-48927. Mamla P., Galinski C., 2009, Basic induced drag study of the joined-wing
aircraft, Journal of Aircraft,46, 4, 1438-1440
28. Galinski C., Hajduk J., Kalinowski M., Seneko K., 2013, Theconcept of the joined wing scaled demonstrator programme, Proceedingsof the CEAS2013 Conference, CEAS, Linkoping, Sweden, 244-253, URL:http://www.ceas2013.org/images/images/CEAS2013.pdf [cited 05 April 2014]
29. Galinski C., Hajduk J., Assumptions of the joined wing flying model pro-
gramme,Transactions of the Institute of Aviation, in print.30. Galiski C., Bartkiewicz P., Hajduk J., Lamers P., 1997, Results of the
J-5 marco dynamic similar model flight tests program, SAE Paper No. 975551
31. Goraj Z., Szender M., 2004, Badania modelu samolotu w locie na duychktach natarcia,Proceedings of VI Konferencja Metody i Technika Bada Stat-kw Powietrznych w Locie, ITWL, Mrgowo, Poland, 143-153
32. Goraj Z., Szender M., 2005, Techniques and critical technologies applied forsmall and mini UAVs. State of the art and development perspectives, Transac-tions of the Institute of Aviation,183, 41-49
33. Goraj Z., Kittmann K., Voit-Nitschmann R., Szender M., 2012,Design and integration of flexi-bird a low cost sub-scale research aircraftfor safety and environmental issues, Proceedings of the ICAS Congress 2012,ICAS, Brisbane, Australia, URL:http://www.icas.org/ICAS ARCHIVE/ICAS2010/ABSTRACTS/469.HTM[cited 20 April 2014]
34. Stalewski W., 2012, Parametric modelling of aerodynamic objects the key to successful design and optimisation, Aerotecnica Missili e Spa-
zio, 91, 1/2, 23-31, URL: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.306.9906&rep=rep1&type=pdf [cited 20 April 2014]
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
35/463
Wybrane zagadnienia programu bada modelu samolotu... 35
35. Stalewski W., tak J., 2012, Optimisation of the helicopter fuselage withsimulation of main and tail rotor influence, Proceedings of the ICAS Congress2012, ICAS, Brisbane, Australia, 2012, URL:http://www.icas.org/ICAS ARCHIVE/ICAS2012/ABSTRACTS/811.HTM
[cited 20 April 2014]36. Stalewski W., tak J., 2011, Multi-objective and multidisciplinary opti-
mization of wing for small aircraft, Proceedings of the CEAS Congress on discCD-ROM, Venice, Italy, 1483-1492
37. Dziubiski A., Surmacz K., 2014, The joined wing scaled demonstrator re-sults of CFD analysis,Proceedings of the ICAS2014 Conference, ICAS, Peters-burg, Russia, ICAS2014-1.10ST, in print
38. Rodzewicz M., Bogdaski K., Ruchaa P., Miller M., 2014, Koncep-cja i realizacja bada zespou napdowego w tunelu aerodynamicznym, [W:]Mechanika w Lotnictwie, ML-XVI 2014, K. Sibilski (red.), PTMTS, Warszawa
39. Gowacki D., Rodzewicz M., 2014, Badania dynamiczne wirnika napduotunelowanego samolotu MOSUPS, [W:] Mechanika w Lotnictwie, ML-XVI2014, K. Sibilski (red.), PTMTS, Warszawa
40. Bogdaski K., Rodzewicz M., Krusz W., Rutkowski M., 2014, Designand optimization of low speed ducted fan for a new generation of joined wingaircraft, Proceedings of the ICAS2014 Conference, ICAS, Petersburg, Russia,ICAS2014-P2.4.13, in print
Selected issues of the joined wing scaled demonstrator investigationprogramme
Abstract
The joined wing is considered as one of possible concepts of future airplanes. It wasproposed by Prandtl in 1924 for the first time, but did not become popular because ofstrong aerodynamic coupling and static indeterminacy. Both of these obstacles can be
overcome by application of numerical methods. This paper presents selected resultsobtained so far in the programme of joined wing flying demonstrator investigation.It has been designed in a rarely analyzed configuration with the front wing abovethe fuselage and aft wing below the fuselage. It may allow avoiding the problem ofaerodynamic interference between the wings at high angles of attack.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
36/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
37/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
38/463
38 M. Garbowski i inni
gdzie
a = (Cz,Cm,Cy, Cn, Cl) 1= (,,) 2= (p, q, r)
1. Wstp
Przedzia maych liczb Reynoldsa, na zakresie ktrych operuj mikrosamo-loty, oznacza istotn rnic w fizycznych procesach towarzyszcych ich lotowiw porwnaniu z lotem zaogowego statku powietrznego. Fizyka lotu tych stat-kw powietrznych jest blisza aerodynamice i mechanice lotu ptakw i duychowadw ni samolotw [20]. Mona zada pytanie, dlaczego bezzaogowy sta-tek powietrzny przyszoci ma by budowany w skali mikro. Czy nie moe to
by urzdzenie cokolwiek wiksze? Odpowied ley w przewidywanych zasto-sowaniach mikrosamolotw. Przeprowadzone w Stanach Zjednoczonych studiana temat taktyki i technik pola walki XXI wieku, wskazuj na szczeglne zna-czenie zabezpieczenia onierzy przed nieprzewidywalnymi zdarzeniami ju odszczebla plutonu. Chodzi tu o dodatkowe informacje uzyskane na szczeblu tak-tycznym, trudne lub praktycznie niemoliwe do uzyskania przez satelity i lata-
jce wysoko due bezzaogowe samoloty wywiadowcze. Nisko latajce mikrosa-moloty mog by wykorzystane do uzyskania informacji taktycznej na szczeblu
plutonu. Przykady misji zwiadowczych wykonywanych przez mikrosamolotyopisane s w publikacji [16]. Jedn z przykadowych misji jest rozpoznaniewykonywane z lotu na wysokoci tu ponad poziomem najwyszego wzniesie-nia terenowego. Misja ta wymaga statku powietrznego o zasigu rzdu 10 km,ktry moe przebywa w powietrzu ok. 1 godziny, osigajcego prdko 10-20 m/s oraz mogcego przesya obrazy sytuacji taktycznej, zarwno w dzie
jak i w nocy. Naley pamita, e wartoci prdkoci lotu takich obiektw sporwnywalne z wartociami podmuchw wiatru, ktre wystpuj w przyziem-nej warstwie atmosfery. Jakkolwiek nie s to zjawiska nadzwyczajne z punktu
widzenia meteorologii, tak stanowi spore zagroenie dla lotu mikrosamolo-tu. Nagy podmuch zmieniajcy dynamicznie warunki opywu pata maegoobiektu latajcego moe doprowadzi do przerwania lotu. Std potrzeba za-pewnienia jak najwikszej stabilnoci, statycznej i dynamicznej, bezzaogowymmikrosamolotom.
2. Eksperyment
Badania charakterystyk stacjonarnych i niestacjonarnych przeprowadzo-no z wykorzystaniem tunelu wodnego [5] (rys. 1). Jest to tunel o zamknitym
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
39/463
Identyfikacja pochodnych aerodynamicznych BSL... 39
obiegu cieczy roboczej, w ktrym przestrze komory pomiarowej posiada prze-krj czoowy o wymiarach 610 mm915 mm. Przepyw wody rozpoczyna siod sekcji (3), do ktrej woda w sposb nieuporzdkowany dostarczana jest rurzza pompy (1) poprzez cylindryczny wlot wykonany z perforowanej blachy (2).
Nastpnie przechodzi przez ustawione w poprzek przepywu sekcje ustalaj-ce (4). Pierwsza z nich o konstrukcji plastra miodu zgrubnie ukierunkowujeruch czsteczek pynu. Kolejne sekcje wykonane s z blachy z gsto nawier-conymi otworami. Za sekcj ustalaczy znajduje si dysza zbiena zmieniajcaszeroko pola przekroju kanau z 5080 mm do szerokoci sekcji pomiarowej (5).Dugo tej sekcji (7) wynosi 1830 mm. Na wejciu do sekcji pomiarowej uzy-skany przepyw jest laminarny i utrzymuje ten stan na caej dugoci tej sekcji.Ostatni sekcj kanau przepywowego jest sekcja z dwoma pionowymi kanaa-mi o przekroju koowym (9), w ktrych to nastpuje rozproszenie strumieniaprzepywu na dwa mniejsze strumienie, a nastpnie skierowanie do ruroci-gu powrotnego (10), ktry podaje czynnik roboczy na pomp. W ten sposbnastpuje zamknicie obiegu. Tunel ponadto wyposaony jest w suport (8)zapewniajcy ruch badanego modelu w trzech paszczyznach, a take instala-cj doprowadzajc barwniki do modelu (6) umoliwiajc wykonanie badawizualizacyjnych opywu badanego obiektu, a take system filtrujcy (11).
Rys. 1. Tunel wodny RHRC 2436
Pomiarw si i momentw aerodynamicznych dokonano z uyciem picio-skadnikowej wagi tensometrycznej [5]. Mierzy ona wartoci si ortogonalnychdo osi wzdunej wagi oraz momentw wzgldem trzech osi wagi. Waga za-mocowana jest nieruchomo wzgldem modelu i przemieszcza si razem z nimw przestrzeni pomiarowej tunelu. Ruch modelu zapewnia suport. Pozwala on
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
40/463
40 M. Garbowski i inni
na przemieszczenia ktowe modelu w trzech paszczyznach w okrelonym za-kresie pooe ktowych [5]. Oprogramowanie sterujce prac urzdzenia po-zwala na rejestrowanie zmian wartoci si i momentw aerodynamicznych pod-czas przemieszcze ktowych modelu, co daje moliwo prowadzenia pomia-
rw dynamiki lotu badanych obiektw [11]-[15].
Rys. 2. Konstrukcja suportu modelu (na podstawie RHRC, 2010)
Znajc parametry lotu rzeczywistej konstrukcji [6], dobrano kryteria po-
dobiestwa opisujce prdko postpow lotu (liczba Reynoldsa), prdkociktowe manewrw i ruchw wykonywanych przez mikrosamolot pod wpywempodmuchw wiatru (liczba Strouhala) oraz prac zespou napdowego
Re =V ca
k=
caV
Sr =f
V (2.1)
Badania przeprowadzono dla dwch liczb Re (28000, 50000). Dla obu tychliczb wyznaczone wartoci liczb Strouhala wyniosy odpowiednio (2,52, 1,37).
W tabeli 1 zebrane s wartoci czstotliwoci zredukowanych, dla ktrych prze-prowadzone byy pomiary dynamiczne.
3. Identyfikacja
W klasycznym ujciu dynamiki lotu zazwyczaj przyjmuje si quasi-stacjonarny model aerodynamiki [1], [2], [4], [8], [18], [19]. Niestacjonarny mo-del aerodynamiki stosowany by gwnie w analizie zagadnie aeroelastycznych[21]. Analizujc wyniki pomiarw parametrw automatycznie sterowanego lotu
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
41/463
Identyfikacja pochodnych aerodynamicznych BSL... 41
Tabela 1.Wartoci czstotliwoci zredukowanych ruchu
k[rad/s] Re = 50000 Re = 28000
0,0087 0,0054 0,00990,0131 0,0081 0,01480,0174 0,0108 0,01970,0218 0,0134 0,02470,0262 0,0161 0,0296
mikrosamolotu, mona stwierdzi, e klasyczny quasi-stacjonarny model aero-dynamiki nie zawsze moe by zastosowany. Dlatego te jednym z kluczowych
problemw rozwoju mikrosamolotw jest opracowanie wiarygodnego modeluaerodynamiki. W kadej fazie lotu dynamika ruchu i aerodynamika wzajem-nie na siebie wpywaj. Stanowi to istotne utrudnienie opisu matematycznegotych procesw. Naley przy tym wzi pod uwag fakt, e historia ruchu jestokrelona poprzez rozwizanie dynamicznych rwna ruchu. Siy i momentyaerodynamicznych dziaajce na statek powietrzny zale w zoony sposbod jego ksztatu, ktw natarcia i lizgu i ich pochodnych wzgldem czasu,prdkoci i przyspiesze ktowych, liczby Reynoldsa, ktw wychylenia po-wierzchni sterowych i innych parametrw lotu. Jedn z metod opisu dynamikilotu i wyznaczania pochodnych aerodynamicznych mikrosamolotu jest teoriafunkcji wskanikowej [22]. Metoda ta wykorzystywana bya szeroko do opisudynamiki lotu wysokomanewrowych samolotw bojowych (m.in. F-16XL [13]),niemniej jednak jest moliwa do wykorzystania take w przypadku bada dy-namiki lotu mikrosamolotw [7].
Teoria funkcji wskanikowej podaje ogln zaleno (3.1), wedug kt-rej warto wspczynnika aerodynamicznego (Ca) w danej chwili czasu jestrwna sumie wartoci tego samego wspczynnika zmierzon w warunkach
opywu ustalonego (Ca(0)) oraz funkcji wskanikowych bdcych odpowiedzia-mi wspczynnika aerodynamicznego na skokowe wartoci zmian parametrwCa (t)
Ca= Ca(0) +t
0
Ca1 (t , )T d
d1()d+
+
l
V
t
0
Ca2 (t , )T d
d2()d
(3.1)
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
42/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
43/463
Identyfikacja pochodnych aerodynamicznych BSL... 43
czyli
(s) =a1(s)s
s + b0(3.7)
Na podstawie rwnania (3.1), przy jednoczesnym zaoeniu, e odchylenia
wsprzdnych stanu od warunkw ustalonych s niewielkie, oglna zalenowspczynnikw aerodynamicznych przyjmie posta
Ca(t) = Ca1 ()1(t) + l
VCa2 ()2(t) (t) (3.8)
Poniewa dane eksperymentalne wykorzystane do identyfikacji pochodnycheksperymentalnych uzyskane zostay dla ruchu oscylacyjnego z jednym stop-niem swobody, mona przyj, e 2 = 1, co oznacza = q, = r oraz= p.
Podstawiajc powysze do rwnania (3.8), otrzymamy
Ca(t) = Ca1 ()1(t) + l
VCa2 ()1(t) (t) (3.9)
Transformata Laplacea rwnania (3.9) ma posta
Ca(s) =
Ca1 () (s) + l
VCa2 ()s
1(s) (3.10)
Podstawiajc do rwnania (3.10) transformat Laplacea funkcji niedoboru(3.7), otrzymamy
Ca(s) =
Ca1 () as
s + b0+
l
VCa2 ()s
1(s) (3.11)
Nastpnie przeksztacajc
Ca(s)(s+b1) = l
VCa2 ()s
2+
Ca1 ()a+b0Ca2 ()
s+b0Ca1 ()
1(s)
(3.12)otrzymamy ostateczn posta transmitancji modelu
Ca(s)1(s)
=As2 + Bs + C
s + b0(3.13)
Nieznane parametryCa1 (),Ca2 (),aib0wyznaczane s na podstawiewspczynnikw powyszej transmitancji zgodnie z zalenociami
A= l
V
Ca2 (
) B= Ca1 (
)
a + b0
l
V
Ca2 (
)
C=b0Ca1 () (3.14)
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
44/463
44 M. Garbowski i inni
Wyniki identyfikacji pochodnych badanego mikrosamolotu przedstawionezostay w znacznej czci w publikacji [7]. Przeanalizowano przebieg map po-chodnych aerodynamicznych oraz zachowanie zarwno modelu w przestrzenipomiarowej tunelu wodnego, jak i rzeczywistego obiektu podczas lotw. Ba-
dania w tunelu wodnym oraz wyniki identyfikacji wykazay bardzo dobr sta-teczno podun mikrosamolotu. Badania w locie potwierdzaj bardzo dobrastateczno mikrosamolotu Pszczoa w kanale podunym. Wyniki badaantysymetrycznych charakterystyk i pochodnych aerodynamicznych wykaza-y, i w pewnych przedziaach ktw natarcia i lizgu oraz dla pewnego zakresuprdkoci ktowych pojawiaj si obszary niestatecznoci.
Rys. 3. Pochodne aerodynamicznedCn/d idCn/drdla Re = 28000, = 30
z widocznymi obszarami niestatecznoci kierunkowej
Zjawisko niegasncych, oscylacyjnych ruchw przechylania samolotu zna-ne jest w literaturze jako wing rock[3], [9], [10], [17]. Ruchom tym towarzy-sz oscylacje w paszczynie odchylenia. Analizujc przedziay zmian stacjo-narnych, antysymetrycznych charakterystyk aerodynamicznych mikrosamolo-tu Pszczoa w funkcji kta natarcia i lizgu, mona zauway przedziaywystpowania niestacjonarnoci. Pojawienie si oscylacji modelu zauwaonezostay podczas podobnych do wing rockaoscylacji zostay zauwaone pod-
czas bada modelu w tunelu wodnym. Charakter tych drga oraz podat-no wagi tensometrycznej spowodoway konieczno ograniczenia cyklu badaw tej paszczynie ruchu, z obawy przed uszkodzeniem urzdzenia pomiarowe-go (podobne zjawisko zaobserwowano take podczas niestacjonarnych badaw aerodynamicznych tunelach NASA, np. [14]). Porwnujc wyniki identy-fikacji antysymetrycznych pochodnych aerodynamicznych z danymi literatu-rowymi, mona zauway, e zjawiska znane z aerodynamiki duych ktwnatarcia samolotw zaogowych wystpuj take w przypadku aerodynami-ki maych liczb Reynoldsa. Po przekroczeniu pewnego kta natarcia, zazwy-czaj zblionego co do wartoci do alphakr, nastpuje zmiana znaku pochod-
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
45/463
Identyfikacja pochodnych aerodynamicznych BSL... 45
nej funkcji Cn/ = f() (lub Cl/ = f()) wzgldem kta natarcia,tj. 2Cn(l)/, co interpretowa naley jako pojawienie si niestateczno-ci dynamicznej. Zmiana znaku tych pochodnych oznacza, e w przedzialezmian kta natarcia z ujemn wartoci drugiej pochodnej, moment odchyla-
jcy (przechylajcy), zamiast wywoywa ruch przeciwstawny do przemiesz-cze ktowych, bdzie powodowa ich zwikszenie, co oznacza pojawienie siniestatecznoci dynamicznej.
Rys. 4. Przebieg zmian pochodnychdCn/ddla pomiarw dynamicznych przyRe = 28000 z pracujcym ukadem napdowym
Rys. 5. Przebieg zmian pochodnychdCn/ddla pomiarw dynamicznych przyRe = 28000 z ukadem napdowym wyczonym z pracy
Wykresy 4 i 5 przedstawiaj wyniki identyfikacji pochodnych dCn/dw funkcji kta natarcia . Pochodne te zostay zidentyfikowane na podstawiepomiarw w tunelu wodnym z wykorzystaniem funkcji wskanikowej. Iden-tyfikacj przeprowadzono dla rnych wartoci ktw natarcia oraz czsto-
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
46/463
46 M. Garbowski i inni
tliwoci zredukowanych. Wyranie widoczna jest zmiana przebiegw funkcjiCl/ = f() i przedziay przejcia w obszary utraty statecznoci dyna-micznej. Charakter zmian funkcji Cl/= f() zaley od wartoci zreduko-wanej czstocik. Pojawienie si oscylacji typuwing rockobserwowano w trak-
cie bada w locie mikrosamolotu Pszczoa. S to oscylacje o okresie rzdu0,5 sekundy i amplitudzie do 20 stopni. Nie powoduj one gronych dla lotumikrosamolotu konsekwencji, mog natomiast powodowa znieksztacenia re-
jestrowanych przez zainstalowane na pokadzie kamery obrazw. Dlatego tewydaje si koniecznym opracowanie ukadu aktywnej stabilizacji tych ruchw.
4. Podsumowanie
Wykorzystujc teori funkcji wskanikowej, moliwe jest dokadne okrele-nie modelu dynamiki lotu badanych obiektw. Wyniki identyfikacji wykorzy-sta mona zarwno do zmian konstrukcyjnych mikrosamolotw, jeeli badanyobiekt znajduje si na etapie konstruowania, bd te jako dane do ukadu ste-rowania i stabilizacji lotu realizowanego przez rzeczywisty obiekt. Znajomoobszarw niestatecznoci mikrosamolotu pozwoli na uniknicie warunkw nie-bezpiecznych dla kontynuowania lotu, a w razie wystpienia takich warun-kw powinno da moliwo zadziaania autopilotowi w sposb umoliwiajcy
kontynuowania lotu, ktre nie byo by moliwe do wykonania przez operatoranaziemnego.
Praca naukowa finansowana ze rodkw na nauk w latach 2008-2010 jako pro-
jekt Autonomiczny, zintegrowany system rozpoznawczy wykorzystujcy autonomiczne
platformy klasy mikro Nr 0059/R/T00/2008/06.
Bibliografia
1. Abzug M.J., 1998,Computational Flight Dynamics, AIAA Ed. Series, Reston,VA
2. Abzug M.J., Larrabee E.E., 2003, Airplane Stability and Control, a Hi-story of the Technologies That Made Aviation Possible, Sec. Ed., CambridgeAerospace Series, Cambridge University Press, Cambridge
3. Ericsson L.E., 1984, The fluid mechanics of slender wing rock, Journal ofAircraft,21, 5, 322-328
4. Etkin B., 1972,Dynamics of Atmospheric flight, John Willey, New York
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
47/463
Identyfikacja pochodnych aerodynamicznych BSL... 47
5. Five-Component Balance and Computer-Controlled Model Support System forWater Tunnel Applications, RHRC, El Segundo, CA, 2010
6. Galiski C., Lawson N.J., bikowski R., 2004, Delta wing with leadingedge extension and propeller propulsion for fixed wing MAV, Proceedings of
24th International Congress of the Aeronautical Sciences, Yokohama, ISBN 0-95339916-8
7. Garbowski M., Sibilski K., 2012, Identyfikacja pochodnych aerodynamicz-nych mikrosamolotu, [W:] Mechanika w Lotnictwie, ML-XV 2012, t. II, K. Si-bilski (red.), PTMTS, Warszawa, 525-539, ISBN 978-83-932107-2-5
8. Glauert H., 1927,A Non-Dimensional Form of the Stability Equations of anAeroplane, Aeronautical Research Council R&M 1093
9. Hsu C.-H., Lan C.E., 1984,Theory of Wing Rock, NASA CR-176640, Hamp-
tan, VA10. Mason W., 2006,High Angle of Attack Aerodynamics, Virginia Tech.,
http://www.dept.aoe.vt.edu/mason/Mason f/ConfigAeroHiAlphaNotes.pdf
11. Klein V., Noderer K.D., 1994,Modeling of Aircraft Unsteady AerodynamicCharacteristics. Part 1 Postulated Models, NASA TM 109120, Langley, VA
12. Klein V., Noderer K.D., 1995,Modeling of Aircraft Unsteady AerodynamicCharacteristics. Part 2 Parametres Estimated from Wind Tunnel Data, NASATM 110161, Langley, VA
13. Klein V., Murphy P.C., Timothy J., Brandon J.M., 1997, Analysis ofWind Tunnel Longintudinal Static and Oscilatory Data of the F-16XL Aircraft,NASA/TM-97-206276
14. Klein V., Murphy P.C., 1998, Estimation of Aircraft Nonlinear UnsteadyParameters from Wind Tunnel Data, NASA/TM-1998-208969
15. Klein V., Morelli A., 2006,Aircraft System Identification: Theory and Prac-tice, American Institute of Aeronautics and Astronautics Educational Series,Reston, VA
16. McMichael J.M., Francis M.S., 1997,Micro Air Vehicles Toward a NewDimension in Flight, DARPA, USA
17. Monaghan R.C., Friend E.L., 1973, Effect on Flaps on Buffet Characteri-stics and Wing-Rock Onset on F-8C Airplane at Subsonic and Transonic Speeds,NASA TM-X-2873, Edwards, CA
18. Pamadi B.N., 2003,Performance, Stability, Dynamics, and Control of Airpla-nes, II ed., AIAA, Reston, VA
19. Smetana F.O.,2001, Flight Vehicle Performance and Aerodynamic Control,AIAA Ed. Series, Reston, VA
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
48/463
48 M. Garbowski i inni
20. Shyy W, Yongsheng L., Jian T., Dragos V., Hao L. , 2011, Aerody-namics of Low Reynolds Number Flyers, Cambridge Aerospace Series, ISBN:978-0521204019
21. Theodorsen T., 1935, General Theory of Aerodynamic Instability and the
Mechanism of Flutter, NACA Rep. 49622. Tobak M., 1954,On the Use of Indicial Function Concept in the Analysis of
Unsteady Motions of Wing and Wing-Tail Combinations, NACA Rep. 1188
Aerodynamic derivatives identification of UAV from experimental data
Abstract
Unmanned Aerial Vehicles should be able to perform the autonomous flight. Tomake it possible, it is essential to elaborate accurate control algorithms for autopilots.UAVs personnel should not be absorbed into activities related to flight stability butshould focused on recognition tasks, while the UAV should autonomously fly alongplanned flight route. To achieve that autonomy, it is required to create a mathematicalmodel of aircraft aerodynamics and flight dynamics. One of the methods to achievethose goals is identification of aerodynamic derivatives from tunnel test data. Thepaper contains aerodynamic derivatives of UAV identified wit use of Indicial Function.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
49/463
Polskie Towarzystwo Mechaniki
Teoretycznej i Stosowanej
MECHANIKA W LOTNICTWIE
ML-XVI 2014
BADANIA DYNAMICZNE WIRNIKA NAPDUOTUNELOWANEGO SAMOLOTU MOSUPS
Dominik Gowacki, Mirosaw RodzewiczPolitechmika Warszawska, Wydzia Mechaniczny Energetyki i Lotnictwa
e-mail: [email protected]
W pracy opisano zagadnienia modelowania i analizy zjawisk wirnika ze-
spou napdowego przeznaczonego do bezzaogowego samolotu w uka-dzie poczonych skrzyde MOSUPS. Samolot ten jest wyposaonyopcjonalnie w otunelowany napd pchajcy. Gwn motywacj podj-cia pracy byo wnikliwe poznanie warunkw pracy zespou napdowegoi wasnoci dynamicznych wirnika dla przeprowadzenia waciwej oce-ny ich wpywu na bezpieczestwo eksploatacji samolotu. Celem anali-zy byo wyznaczenie prdkoci krytycznych tego wirnika ze wzgldu namoliwo wzbudzania si drga. Ze wzgldu na skomplikowan geome-tri do oblicze wykorzystano Metod Elementw Skoczonych. W pra-cy wyznaczono czstotliwoci (i obroty) krytyczne wirnika podpartego
podatnie w oyskach oraz postaci niestatecznoci precesyjnych. Przed-stawiono wykresy Campbella i SAFE. Biorc pod uwag ruch obrotowywirnika, uwzgldniono wpyw efektw giroskopowych na czstoci drgawasnych. Ukady giroskopowe (przy braku tumienia wewntrznego i ze-wntrznego) s ukadami zachowawczymi (brak rozpraszania energii).
1. Wstp
Czste przypadki uszkodze zespow wirujcych pojawiajce si w przy-
padku urzdze prototypowych skoniy autorw niniejszego artykuu dopodjcia tego tematu. Na etapie projektu istotne jest wyznaczenie krytycz-nych prdkoci drga. Przedmiotem rozwaa niniejszego artykuu jest zatemanaliza drga napdu otunelowanego do prototypowego samolotu o nazwieMOSUPS (rys. 1) [1]-[3]. Samolot powstaje w konsorcjum, ktre tworz: Po-litechnika Warszawska, Instytut Techniczny Wojsk Lotniczych, MSP MarcinSzender oraz Instytut Lotnictwa. Samolot ten ma innowacyjny ukad poczo-nych skrzyde, ktry minimalizuje opr indukowany takiego patowca. Pro-
jekt jest finansowany przez Narodowe Centrum Bada i Rozwoju w ramachPBS1/A6/14/2012.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
50/463
50 D. Gowacki, M. Rodzewicz
Rys. 1. Samolot w ukadzie poczonych skrzyde MOSUPS (projekt wirtualny zazgod MSP)
Gwnym zaoeniem konstrukcyjnym programu byo sprawdzenie wenty-latora z kompozytowym wirnikiem picioopatowym wsppracujcym z silni-kiem Rotomax 1.6 o mocy 3 kW (rys. 2) [4]. W prezentowanej pracy analizo-wany jest wpyw prdkoci obrotowej na drgania wasne konstrukcji. Przed-stawiono zjawiska wystpujce w przypadku wirujcych konstrukcji, takie jakefekt giroskopowy oraz precesja.
Rys. 2. Napd otunelowany oraz szczegy budowy wirnika
Omwiono warunki wymagane do wystpienia zjawiska rezonansu.W praktyce inynierskiej pojawienie si rezonansu przewidywane jest na pod-stawie wykresw Campbella. W badanej konstrukcji wentylatora sprawdzono,czy nie wystpuje niebezpieczestwo wzbudzenia drga o charakterze rezonan-sowym od wymuszenia pulsacj przepywu w obrbie piercienia. Oszacowanoprdkoci krytyczne, przy ktrych ukad mgby drga z duymi amplituda-mi. Ponadto, w celu potwierdzenia lub wykluczenia prawdopodobnych warun-kw rezonansu, posuono si metodologi SAFE. Obliczenia poprzedziy testy
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
51/463
Badania dynamiczne wirnika napdu otunelowanego... 51
ruchowe stanowiska badawczego przedstawionego na rys. 3 oraz opracowanieprogramu komputerowego w rodowisku LabVIEW sucego do sterowaniasilnikiem, ktrego panel operatora pokazano na rys. 4.
Rys. 3. Stanowiska badawcze przeznaczone do bada tunelowych
Rys. 4. Panel operatora programu do sterowania silnikiem
2. Analiza modalna wirujcych konstrukcji
Badanie dynamiki maszyn wirnikowych obejmuje wyznaczanie oscylacyj-nego zachowania elementw wirujcych. W urzdzeniach takich jak silniki lot-nicze, pompy odrodkowe czy turbiny wystpuj charakterystyczne zjawiskazwizane z bezwadnoci, ktre powinny by uwzgldniane w celu zminimali-zowania prawdopodobiestwa wystpienia awarii ju na etapie projektu. Abydokadnie przewidzie zachowanie maszyny wirujcej z wysokimi prdkocia-mi obrotowymi, rzdu tysicy obrotw na minut, w analizach musz byuwzgldniane efekty bezwadnociowe [5]. Wanym zagadnieniem dotyczcym
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
52/463
52 D. Gowacki, M. Rodzewicz
bezwadnoci jest moment giroskopowy wynikajcy z precesji ruchu wiruj-cego i jednoczenie drgajcego wirnika. To znaczy, e im prdko obrotowa
jest wysza, tym moment giroskopowy dziaajcy na konstrukcj nabiera co-raz wikszego znaczenia. Nie uwzgldnienie tego efektu w czasie projektowania
moe skutkowa uszkodzeniem oysk lub podpar. Jednoczenie uwzgldnie-nie tumienia w znacznym stopniu wynikajcego ze sztywnoci oysk i podat-noci podpar oraz waciwy dobr tego parametru moe mie duy wpywna stateczno ukadu drgajcego. Oglny model wirnika maszyny rotacyjnejprzedstawiono na rys. 5. Maszyna jest podparta w sposb sprysty o rnychsztywnociach w zalenoci od kierunku.
Rys. 5. Oglny model maszyny wirnikowej
W nieruchomym ukadzie odniesienia mamy do rozwizania nastpujcerwnanie [6]
Mu + (C + G)u + (K + B)u= f (2.1)
gdzie: M macierz masowa, C macierz tumienia, K macierz sztywnoci,G macierz tumienia yroskopowego, B macierz tumienia wynikajca od
obrotu.Rwnanie dynamiczne w obracajcym si ukadzie odniesienia ma posta
[6]
Mur+ (C + Ccor)ur+ (KKspin)ur=F (2.2)gdzie: Ccor macierz Coriolisa.
Gdy konstrukcja wiruje wok osi zi dodatkowo wprowadzi si j w obrtwok osi prostopadej do osi z, to pojawi si moment reakcji, ktry nazywany
jest momentem giroskopowym. Powoduje on dodatkowy ruch zwany precesyj-nym. Precesja jest zjawiskiem zmiany kierunku osi obrotu z obracajcego si
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
53/463
Badania dynamiczne wirnika napdu otunelowanego... 53
ciaa. O obrotu zsama obraca si wwczas wok pewnego kierunku w prze-strzeni, zakrelajc powierzchni boczn stoka. Tym samym, gdy wirujcakonstrukcja drga z dan czstotliwoci, punkty nalece do osi obrotu z po-ruszaj si po trajektoriach eliptycznych, a w szczeglnym przypadku po ko-
owych orbitach. W zalenoci od tego, czy zmiana kierunku osi obrotu zjestzgodna, czy przeciwna do obrotw konstrukcji mwi si odpowiednio o pre-cesji wspbienej (dodatniej) i przeciwbienej (ujemnej), rys. 6. W oglnymprzypadku stanu ustalonego drga, trajektoria punktw umiejscowionych naosi obrotu nazywana orbit ma ksztat elipsy. Gdy stosowane jest symetryczneoyskowanie, punkty te z kolei zataczaj okrgi [7], [8]. Wynika to z precesji.
Rys. 6. Precesja towarzyszca obrotom wau
Na czstotliwoci drga wasnych wirnika wpywa zarwno masa, jak i mo-ment bezwadnoci wzgldem jego rednicy. Zmiana masy ma wikszy wpywna czstotliwoci drga wasnych postaci osiowych i skrtnych, podczas gdyzmiana momentu bezwadnoci znacznie wpywa na czstotliwoci postaci gi-tych. Postacie podatne na moment bezwadnoci (np. postaci o ksztacie sto-ka) s bardzo wraliwe na zmian prdkoci obrotowej. Ponadto, zakadajc,e waciwoci oyskowania wirnika s niezmienne, wtedy czstotliwoci drgawasnych postaci o precesji przeciwbienej zazwyczaj bd male wraz ze wzro-
stem prdkoci obrotowej konstrukcji, natomiast czstotliwoci odpowiadajcepostaciom o precesji wspbienej przewanie bd rosn.
3. Warunki rezonansu
W celu okrelenia dynamiki maszyny wirujcej naley obliczy czstotliwo-ci i towarzyszce im postaci drga wasnych. W wypadku obiektw osiowo-lub cyklicznie symetrycznych, takich jak na przykad tarcze opatkowe tur-bin, postaci drga osiowych i stycznych mona scharakteryzowa przy pomocyrednic (rys. 7) i okrgw wzowych.
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
54/463
54 D. Gowacki, M. Rodzewicz
Rys. 7. Przykady rednic wzowych
Maksymalna liczba rednic wzowych tarczy z parzyst liczb opatekwynosi poow tej liczby (liczba opatek)/2. Dla nieparzystej liczby opatek,liczba rednic wzowych bdzie wynosia (liczba opatek-1)/2. Posta drgawasnych wirnika przy danej prdkoci obrotowej Nmona wyrazi rwnaniem[7], [8]
ym(, t) = Ymcos(mt + m) (3.1)gdzie: m czstotliwo drga wasnych [Hz], m numer rednicy wzowej.
Obracajce si elementy maszyn wirnikowych, ktre pracuj w stanie usta-lonym, podlegaj wzbudzeniom o charakterze harmonicznym. Podstawowymrdem takiego rodzaju wymuszenia jest niewywaenie, ktre jest zsynchro-nizowane z obrotami, tzn. oddziauje z t sam czstotliwoci co obroty. Do-
datkowym wymuszeniem jest wystpienie zmiennych si obwodowych dziaa-jcych na opatki, wynikajcych z zaburzonego przepywu powietrza. Te siyzale od pozycji opatki w stosunku do przeszkd zakcajcych przepyw.Wymuszenia te mog zosta rozoone na skadowe harmoniczne
fn(, t) = Fnsin[n(t + )] (3.2)
gdzie: n numer harmonicznej, Fn amplituda n-tej harmonicznej, czstotliwo wymuszenia [Hz], kt przesunicia fazowego, t czas [s].
Wynika z tego, e do zdefiniowania postaci drga wasnych potrzebne strzy parametry: czstotliwo drga wasnych m [Hz], liczba rednic wzo-wych moraz prdko obrotowa wirnika N [obr/min].
Czstotliwo (okresowo) wymuszenia harmonicznego zaley od prd-koci obrotowej turbiny i liczby zaburze po obwodzie (np. liczby dysz). Mona
j wyrazi wzorem
=MN
60 (3.3)
gdzie: czstotliwo wymuszenia [Hz], M liczba wymusze (zaburze)po obwodzie, N prdko obrotowa [obr/min].
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
55/463
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
56/463
56 D. Gowacki, M. Rodzewicz
prdkoci krytyczne. Prdko krytyczna jest prdkoci obrotow konstruk-cji, ktra odpowiada jej czstotliwoci rezonansowej, tzn. gdy czstotliwodrga wasnych pokrywa si z czstotliwoci wymuszenia wirujcego obiek-tu. Potencjalne niebezpieczne prdkoci krytyczne mona wyznaczy, stosujc
tzw. wykresy Campbella. Prdkoci krytyczne to prdkoci obrotowe wirnika,przy ktrych amplitudy drga oraz zwizane z tym naprenia s najwiksze.Zjawisko osigania maksimum amplitudy drga przy prdkociach krytycz-nych jest podobne do zjawiska rezonansu, przy ktrym czstotliwo siy jestrwna czstotliwoci drga wasnych ukadu. Wykres Campbella suy po-rwnaniu czstotliwoci drga wasnych konstrukcji i czstotliwoci si wymu-szajcych [8]. Przebiegi tych parametrw przedstawia si w funkcji prdkociobrotowej, tak jak jest to pokazane na przykadowym wykresie z rysunku 8.
Rys. 8. Przykadowy wykres Campbella dla wirnika turbiny
Punkty, w ktrych czstotliwoci drga i si s sobie rwne, identyfikuje sijako warunki prawdopodobnego rezonansu, a odpowiadajce im prdkoci ob-rotowe jako prawdopodobne prdkoci krytyczne. Na wykresie odpowiada tomiejscom przeci przebiegw tych czstotliwoci. Wykres Campbella tworzo-ny w programie ANSYS w module sucym do symulacji maszyn wirnikowych(Rotor Dynamics) obrazuje zmian czstotliwoci drga wasnych w funkcjiprdkoci obrotowej wirnika. Wykres Campbella pozwala okreli prdkocikrytyczne poprzez przecicie prostej (okrelonej jako nrazy prdko obroto-w) z krzywymi okrelajcymi postacie drga wasnych. Wykres taki zawiera
-
7/26/2019 Mechanika w Lotnictwie -2014-TI-str-1-464
57/463
Badania dynamiczne wirnika napdu otunelowanego... 57
take opisy informujce o stabilnoci procesu drga i kierunek precesji dla ka-dej z postaci. Brak stabilnoci ukadu drgajcego prowadzi zazwyczaj do jegozniszczenia. Najczciej powodu niestabilnoci naley doszukiwa si w nie-odpowiednich waciwociach oysk (ich niesymetrycznoci), nieodpowiednim
tumieniu, kontakcie midzy wirujcymi i nieruchomymi czciami.
5. Wykres SAFE
Z przykadowego wykresu Campbella (rys. 7) wida, e w przypadku wir-nikw z du liczb opatek mona zidentyfikowa wiele punktw prawdopo-dobnego rezonansu. Z dowiadczenia jednak wiadomo, e tylko w niektrych
z nich dojdzie do krytycznej odpowiedzi konstrukcji, znaczcej ze wzgldu nawytrzymao. Dlatego pojawia si potrzeba odsiania niegronych przypad-kw i uzasadnienia, dlaczego te punkty s nieistotne w dalszych rozwaaniach.Wykres Campbella jest w istocie tylko jednym z rzutw trjwymiarowej repre-zentacji wzorw (3.1) i (3.3), a tym samym powierzchni charakteryzujcychodpowiednio drgania wasne konstrukcji i wymuszenia dziaajce na ni. Drugirzut nazywany jest wykresem SAFE (Singhs Advanced Frequency Evaluation)(rys. 9) i wnosi do analizy brakujcy wymiar postaci drga i si.
Rys. 9. Graficzna reprezentacja warunkw rezonansu. Wystpuje on w miejscachprzecicia powierzchni odpowiadajcych charakterystyce d






![Kurs Komputerowy S System Symbolicznyzelek/kurss/02-obliczenia symboliczne.pdfIn[91]:= Coefficient@c, x y^2D Out[91]=-464 In[92]:= CoefficientList@c, xD Out[92]= 90, 64+32 y-464 y](https://static.fdocuments.pl/doc/165x107/611f101afcf20b58f254940d/kurs-komputerowy-s-system-zelekkurss02-obliczenia-symbolicznepdf-in91-coefficientc.jpg)