![Mechanika (1).ppt [tryb zgodności]](https://static.fdocuments.pl/doc/165x107/587604711a28ab10278bd3b6/mechanika-1ppt-tryb-zgodnosci.jpg)
1. mechanika
59
Tomasz Runka Wydzial Fizyki Technicznej Wyklad 45h Ćwiczenia rachunkowe 15h Zaliczenie na ocenę Zaliczenie Konsultacje Zajęcia wyrównawcze 30h ul. Nieszawska 13A Pokój 405 Zajęcia nieobowiązkowe
-
Upload
adam-tuliszka -
Category
Documents
-
view
90 -
download
2
Transcript of 1. mechanika
Tomasz Runka
Wydział Fizyki Technicznej
Wykład 45h
Ćwiczenia rachunkowe 15h
Zaliczenie na ocenę
Zaliczenie
Konsultacje
Zajęcia wyrównawcze 30h
ul. Nieszawska 13APokój 405
Zajęcia nieobowiązkowe
Wiadomości wstępneWielkości fizyczne, działania na wektorach, operatory różniczkowe
1. KinematykaPrędkość, przyspieszenie i równania ruchu postępowego i obrotowego
2. DynamikaMasa i moment bezwładności, siła, moment siły, pęd, moment pędu, zasady dynamiki
3. Układy inercjalne i nieinercjalne
I. Klasyczna mechanika nierelatywistyczna
3. Układy inercjalne i nieinercjalneSiły bezwładności, ruch ciał o zmiennej masie
4. Praca moc i energiaPraca, siły zachowawcze i niezachowawcze, energia kinetyczna i potencjalna
5. Zasady zachowaniaZasada zachowania: pędu, momentu pędu, energii mechanicznej i innych wielkości
6. Oddziaływanie grawitacyjneSiła grawitacyjna, pole grawitacyjne, ruch w polu, prawa Keplera
Gaz doskonały, gaz rzeczywisty, zasady termodynamiki, mikroskopowainterpretacja ciśnienia i temperatury, zjawiska transportu w gazach
II. Termodynamika – wybrane zagadnienia
III. ElektrostatykaPrawo Coulomba, pole elektryczne, dipol elektryczny, prawo Gaussa,potencjał elektryczny, pojemność elektryczna, energia elektryczna,kondensator, dielektryki
IV. Prąd elektryczny
Prąd stały, prawo Ohma, teoria Drudego-Lorentza przewodnictwaelektrycznego metali, prawa Kirchhoffa, praca prądu elektrycznegoelektrycznego metali, prawa Kirchhoffa, praca prądu elektrycznego
V. Magnetyzm i indukcja elektromagnetyczna
Siła Lorentza, ruch cząstek naładowanych w polu magnetycznym, siłaelektrodynamiczna, prawo Ampera, prawo Biota-Savarta, indukcjaelektromagnetyczna, energia pola magnetycznego, równania Maxwella
VI. Drgania i fale
Drgania harmoniczne proste, drgania tłumione, drgania wymuszone,rezonans, równanie fali akustycznej, rozwiązanie równania falowego, faleelektromagnetyczne, interferencja, dyfrakcja, polaryzacja
VII. Szczególna teoria względnościTransformacja Lorentza, skrócenie długości, wydłużenie czasu(dylatacja), relatywistyczne składanie prędkości, masa relatywistyczna,energia relatywistczna
VIII. Fizyka współczesna• Fale materii• Efekt fotoelektryczny• Efekt Comptona• Promieniowanie cieplne• Model Bohra budowy atomu wodoru• Probabilistyczna interpretacja fal materii, funkcja falowa i gęstość• Probabilistyczna interpretacja fal materii, funkcja falowa i gęstość
prawdopodobieństwa• Zasada nieoznaczoności Heisenberga• Równanie Schrödingera• Elementy fizyki ciała stałego, aspekty eksperymentalne badania ciała
stałego• Najnowsze osiągnięcia fizyki eksperymentalnej w zakresie
nanotechnologii
Literatura stanowiąca uzupełnienie wykładu:
D. Halliday, R. Resnick, Fizyka, t.I i II, PWN, Warszawalub nowe wydanie t. I-V
J. Orear, Fizyka, t. I i II, Wydawnictwo Naukowo Techniczne, Warszawa
Cz. Bobrowski, Fizyka – krótki kurs, Wydawnictwo Naukowo Techniczne, Warszawa
Techniczne, Warszawa
W. Bogusz, J. Garbarczyk, F. Krok, Podstawy Fizyki, Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa
Wykład prof. Z. Kąkola z AGH Kraków http://home.agh.edu.pl/~kakol/wsieci_pl.htm
J. Massalski, M. Massalska – Fizyka dla inżynierów, cz. 1, 2, WNT, 1980
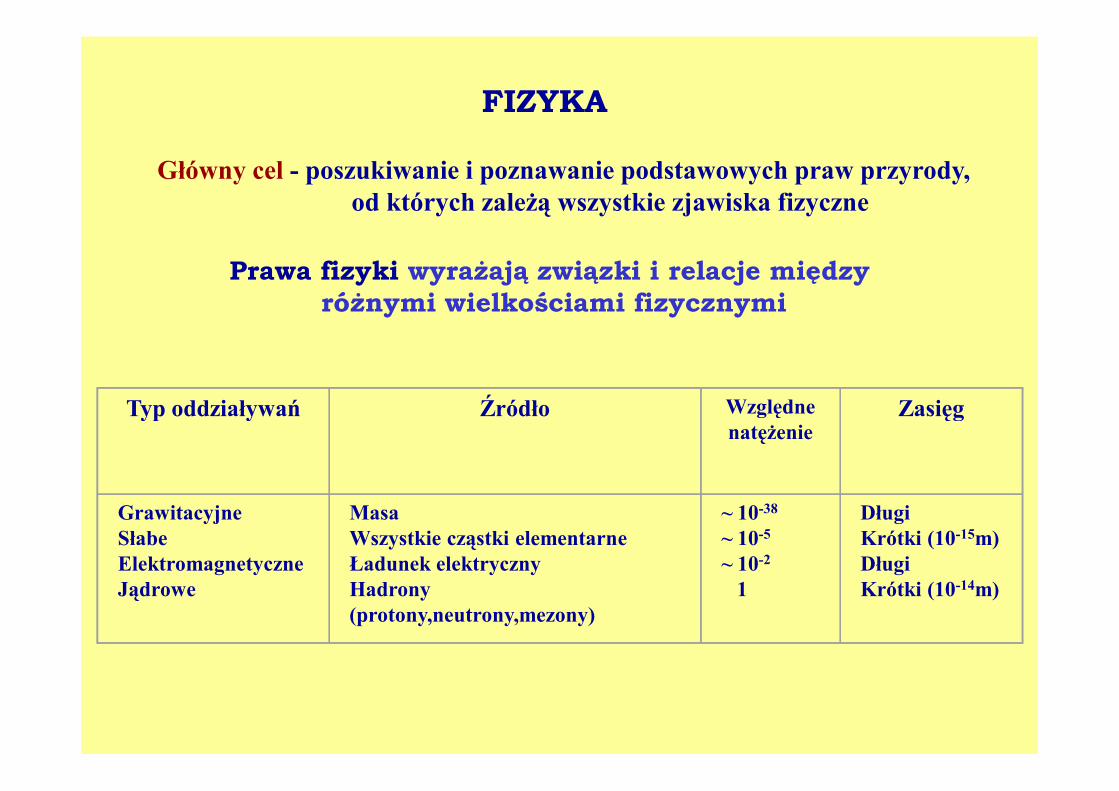
Główny cel - poszukiwanie i poznawanie podstawowych praw przyrody,od których zależą wszystkie zjawiska fizyczne
FIZYKA
Prawa fizyki wyrażają związki i relacje międzyróżnymi wielkościami fizycznymi
Typ oddziaływań Źródło Względne ZasięgTyp oddziaływań Źródło Względne natężenie
Zasięg
GrawitacyjneSłabeElektromagnetyczneJądrowe
MasaWszystkie cząstki elementarneŁadunek elektrycznyHadrony (protony,neutrony,mezony)
~ 10-38
~ 10-5
~ 10-2
1
DługiKrótki (10-15m) DługiKrótki (10-14m)
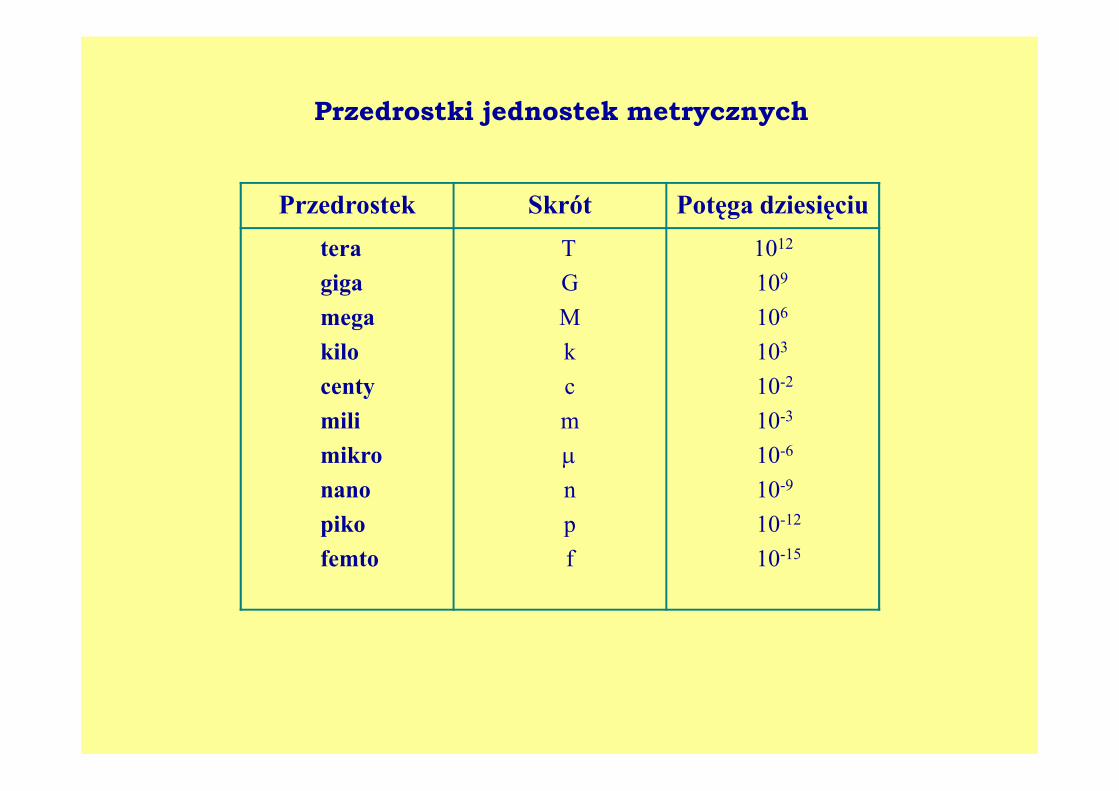
Przedrostki jednostek metrycznych
Przedrostek Skrót Potęga dziesięciu
tera
giga
mega
kilo
centy
T
G
M
k
c
1012
109
106
103
10-2centy
mili
mikro
nano
piko
femto
c
m
µ
n
p
f
10
10-3
10-6
10-9
10-12
10-15
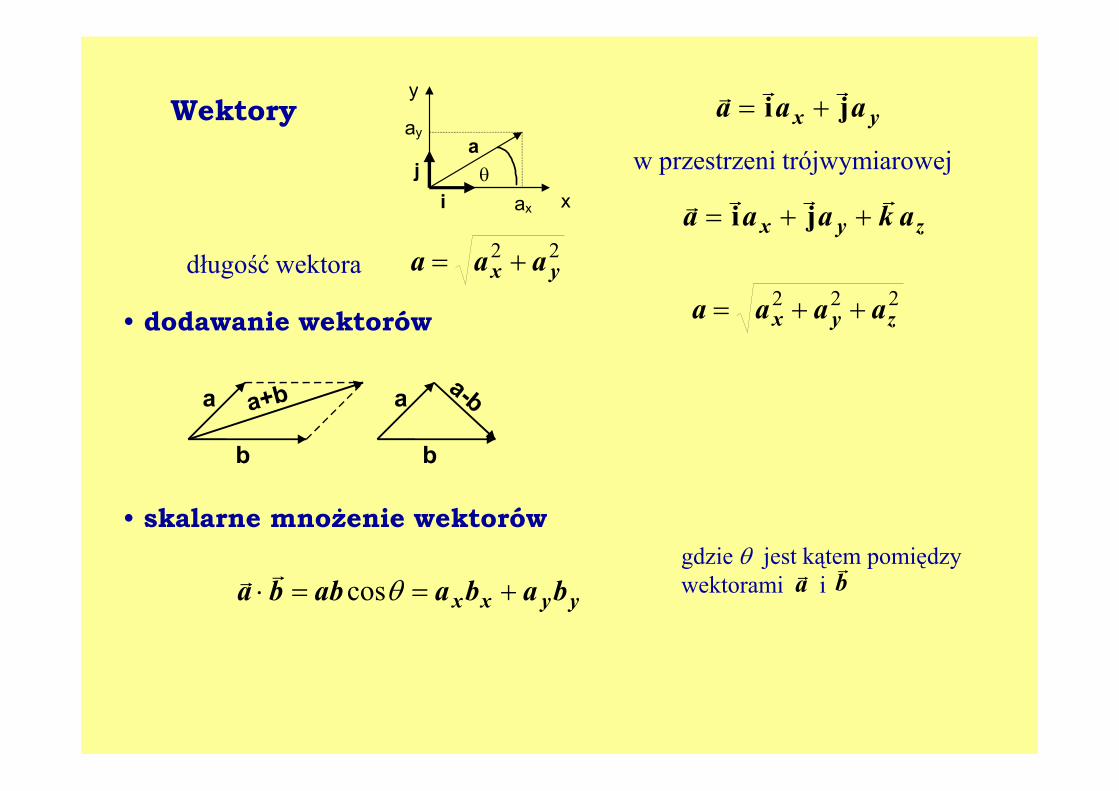
Wektory
• dodawanie wektorów
y
x
j
i
θ
a ay
ax
yx aaa jirrr +=
w przestrzeni trójwymiarowej
zyx akaaarrrr ++= ji
22yx aaa +=długość wektora
222zyx aaaa ++=
• skalarne mnożenie wektorów
yyxx babaabba +==⋅ θcosrr
gdzie θ jest kątem pomiędzy
wektorami iar
br

• mnożenie wektorowe
bacrrr ×= długość tego wektora c = ab sinθ
gdzie θ jest kątem pomiędzy
wektorami iar
br
Kierunek wektora c jest prostopadły do płaszczyzny utworzonej przez wektory a i b,
tzn. prostopadły do tych wektorów. Zwrot wektora c wyznacza reguła śruby prawoskrętnej
Przykład:FrMrrr×= moment siły
prLrrr×= moment pędu
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
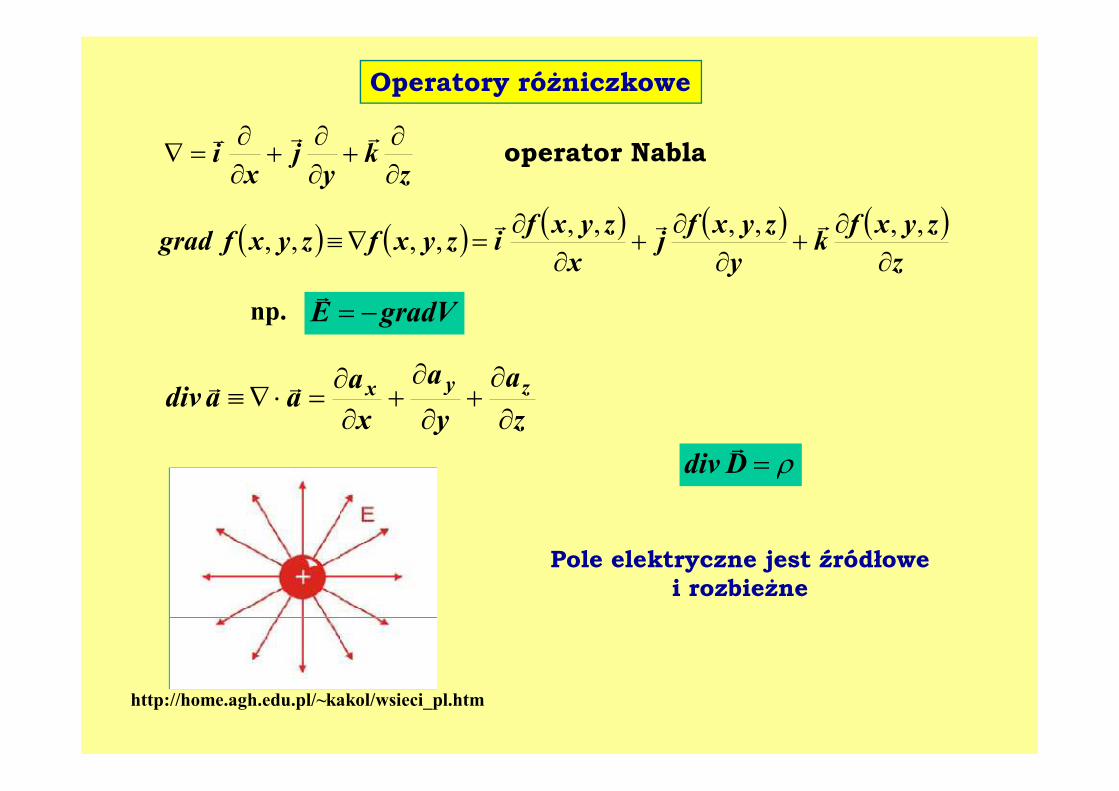
Operatory różniczkowe
( ) ( ) ( ) ( ) ( )z
zyxfk
y
zyxfj
x
zyxfizyxfzyxfgrad
∂∂
+∂
∂+
∂∂
=∇≡,,,,,,
,,,,rrr
zk
yj
xi
∂∂
+∂∂
+∂∂
=∇rrv
operator Nabla
np. gradVE −=r
aaaaadiv zyx ∂
+∂+
∂=⋅∇≡ rr
zyxaadiv zx
∂+
∂+
∂=⋅∇≡ rr
ρ=Ddivr
Pole elektryczne jest źródłowei rozbieżne
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
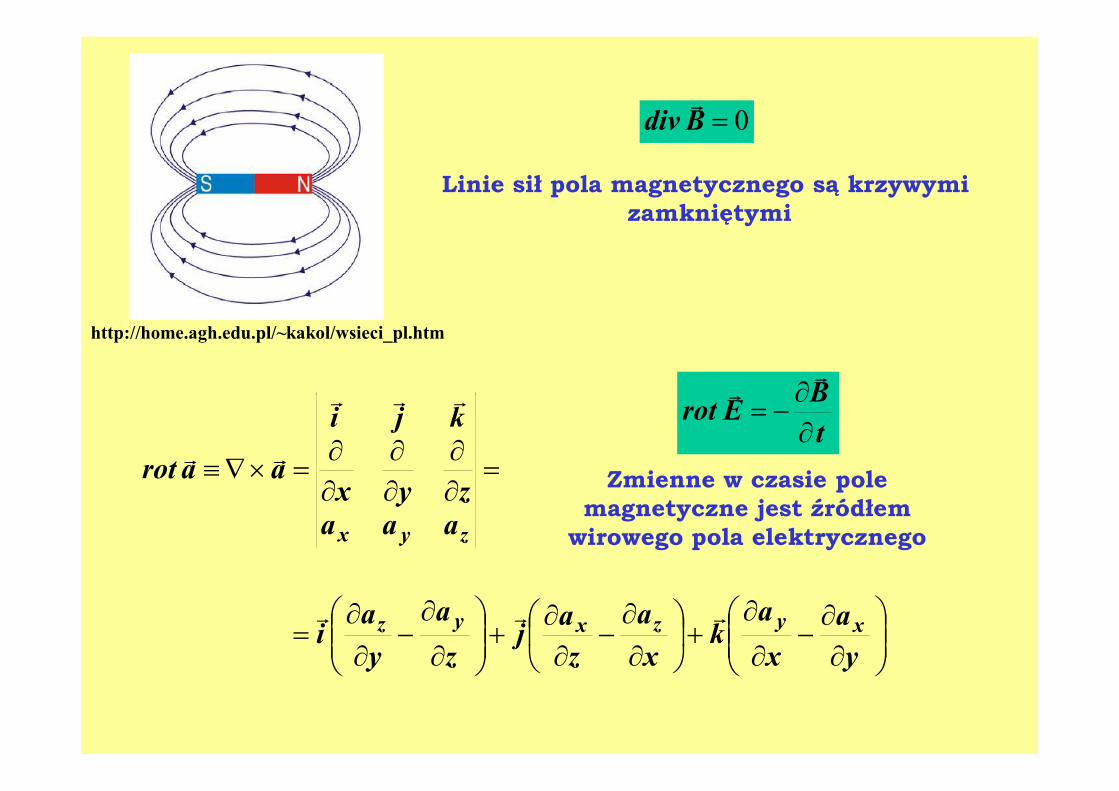
rrr BErot
∂−=
rr
Linie sił pola magnetycznego są krzywymi zamkniętymi
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
0=Bdivr
=∂∂
∂∂
∂∂
=×∇≡
zyx aaa
zyx
kji
aarot
rrr
rr
∂∂−
∂
∂+
∂
∂−
∂∂
+
∂
∂−
∂
∂=
y
a
x
ak
x
a
z
aj
z
a
y
ai xyzxyz rrr
t
BErot
∂∂−=
r
Zmienne w czasie pole magnetyczne jest źródłem
wirowego pola elektrycznego

Kinematyka
Dział mechaniki zajmujący się zagadnieniami ruchubez uwzględnienia jego przyczyn
Prędkość średniat
rVsr ∆
∆=
rr
Prędkość chwilowatd
rd
t
rV
tch
rrr
≡∆∆
=→∆ 0
lim
Prędkość jest zmianą odległości w jednostce czasu
Przyspieszeniet
V
ta
∆∆=
∆−
=rrr
r 0VV
ta
d
dVr
r =
stałe
chwilowe
gdy prędkość zmienia się
jednostajnie z czasem
Przyspieszenie to tempo zmian prędkości
tar
nar
ar
tir
nir
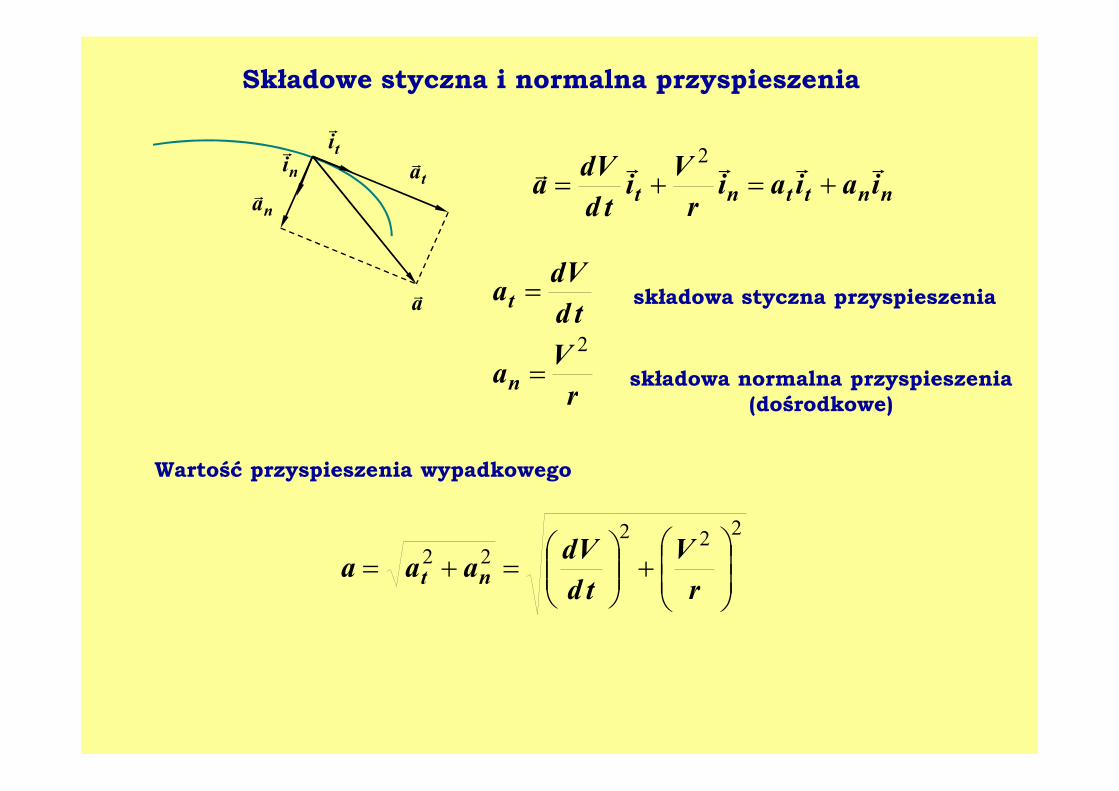
Składowe styczna i normalna przyspieszenia
nnttnt iaiair
Vi
td
Vda
rrrrr +=+=2
td
Vdat =
r
Van
2
=
składowa styczna przyspieszenia
składowa normalna przyspieszenia(dośrodkowe)r (dośrodkowe)
Wartość przyspieszenia wypadkowego
222
22
+
=+=
r
V
td
Vdaaa nt
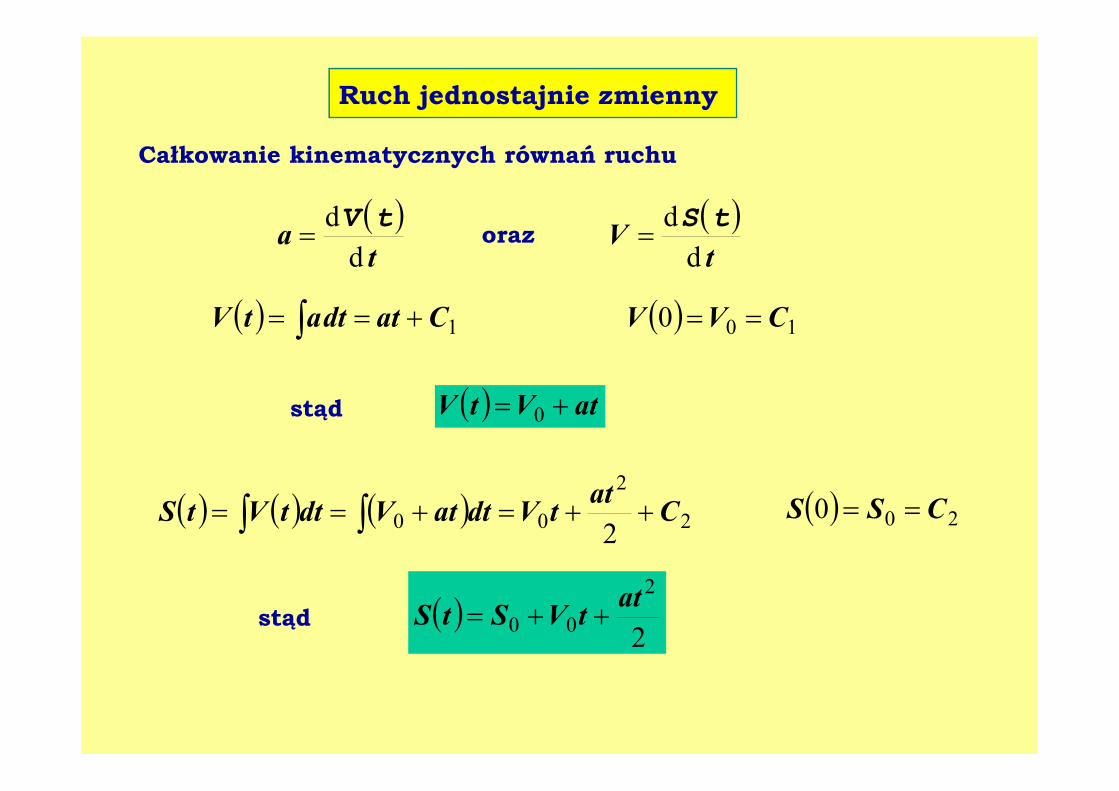
Ruch jednostajnie zmienny
( )t
ad
d tV=
Całkowanie kinematycznych równań ruchu
( )t
Vd
d tS=oraz
( ) ∫ +== 1CatdtatV ( ) 100 CVV ==
stąd ( ) atVtV +=stąd ( ) atVtV += 0
( ) ( ) ( ) 2
2
002
Cat
tVdtatVdttVtS ++=+== ∫ ∫ ( ) 200 CSS ==
stąd ( )2
2
00
attVStS ++=
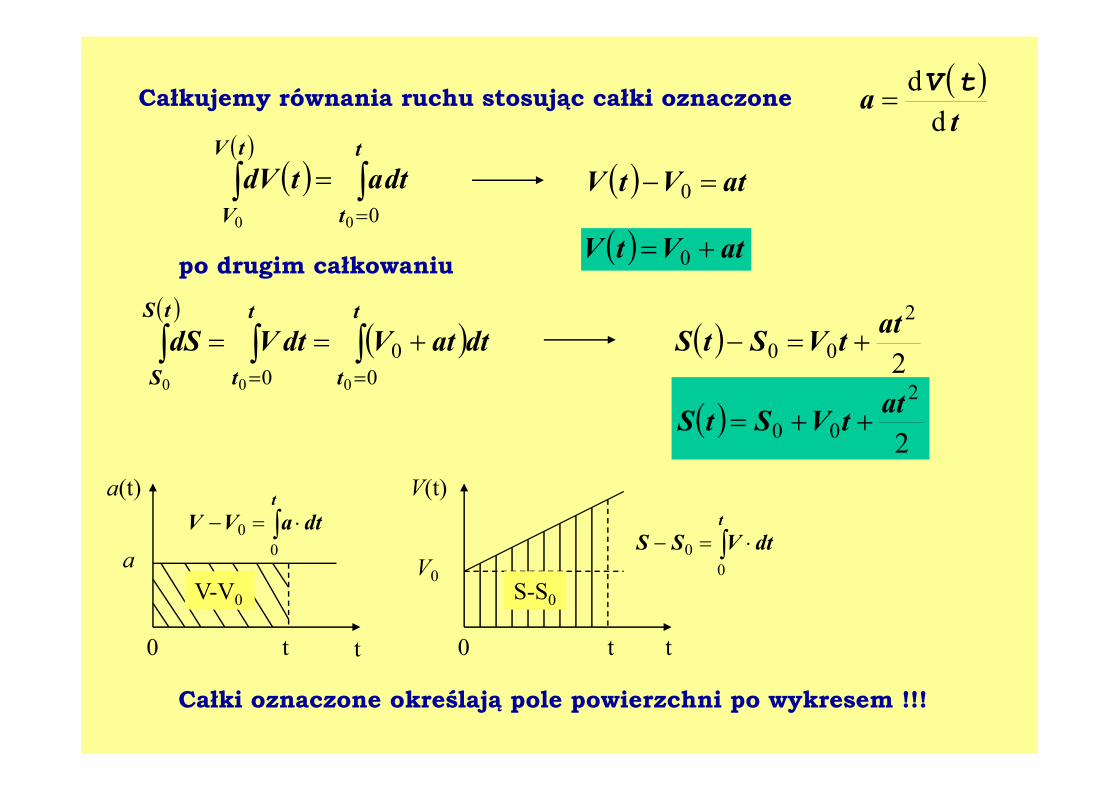
Całkujemy równania ruchu stosując całki oznaczone ( )t
ad
d tV=
( )( )
∫∫=
=t
t
tV
V
dtatdV
000
( ) atVtV =− 0
( )( )∫∫∫==
+==t
t
t
t
tS
S
dtatVdtVdS
0
0
0 000
po drugim całkowaniu
( )2
2
00
attVStS +=−
( ) atVtV += 0
( )2
at( )2
2
00
attVStS ++=
∫ ⋅=−t
dtaVV
0
0
t t t t
a
00
∫ ⋅=−t
dtVSS
0
0
S-S0V-V0
a(t) V(t)
Całki oznaczone określają pole powierzchni po wykresem !!!
V0
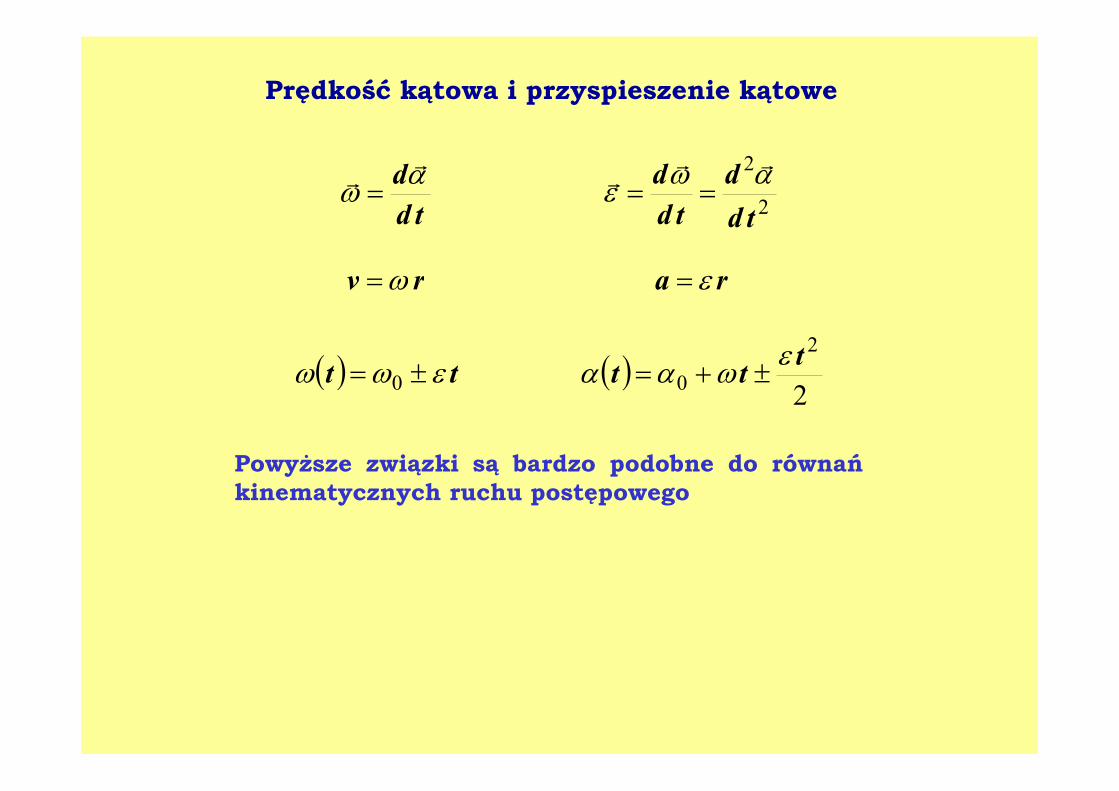
Prędkość kątowa i przyspieszenie kątowe
td
dαω
rr =
2
2
td
d
td
d αωε
rrr ==
rv ω= ra ε=
( ) tt εωω ±= 0 ( )2
2
0
tttε
ωαα ±+=2
Powyższe związki są bardzo podobne do równańkinematycznych ruchu postępowego
Dynamika
Opisując ruch ciał, uwzględniamy ich masy oraz działające na nie siły
Masa bezwładna jest miarą bezwładności ciała tzn. oporu jaki ciało stawia sile zmieniającej stan jego ruchu
Masa jest wielkością charakteryzującą bezwładność ciała lub jego oddziaływanie z polem grawitacyjnym
Masa i moment bezwładności
Środek masy układu punktów materialnychŚrodek masy układu punktów materialnych
∑=
=
≡Ni
i
iismrm
Mr
1
1 rrgdzie ∑
=
=
≡Ni
i
imM
1
Rozpatrzmy ciało sztywne o ciągłym rozkładzie masy
∫∑=
→∆≡∆=
MN
iii
msm
dmrM
mrM
ri
010
1lim
1 rrr∑ ∫=
→∆≡∆=
N
i
M
im
dmmMi 1 0
0lim
∞→N
W ruchu obrotowym bezwładność ciała zależy nie tylko od jego masy, ale także od odległości od osi obrotu
Miarą bezwładności w ruchu obrotowym jest moment bezwładności
- dla punktu materialnego
Moment bezwładności
2mrI =
- dla układu punktów materialnych ∑=
=N
i
iirmI
1
2
∞→N
- dla bryły sztywnej ∑ ∫=
→∆=∆=
N
i
M
iim
dmrrmIi 1 0
22
0lim
Twierdzenie Steinera
2MaIIsm+=
Ism – moment bezwładności względem środka masy
a – odległość między dwiema osiami
∞→N
Moment bezwładności ciała zależy od wyboru osi obrotu i przybierawartości ekstremalne względem osi głównych, a odpowiadające immomenty nazywamy – głównymi momentami bezwładności
W przypadku ogólnym moment bezwładności definiujemy jako tensor
=
zzzyzx
yzyyyx
xzxyxx
III
III
III
I
zzzyzx
Elementy diagonalne tensora: Ixx, Iyy, Izz są momentami bezwładności względem osi x, y,z.
Składowe o wskaźnikach mieszanych np. Ixy nazywamy momentami dewiacyjnymi lub zboczenia
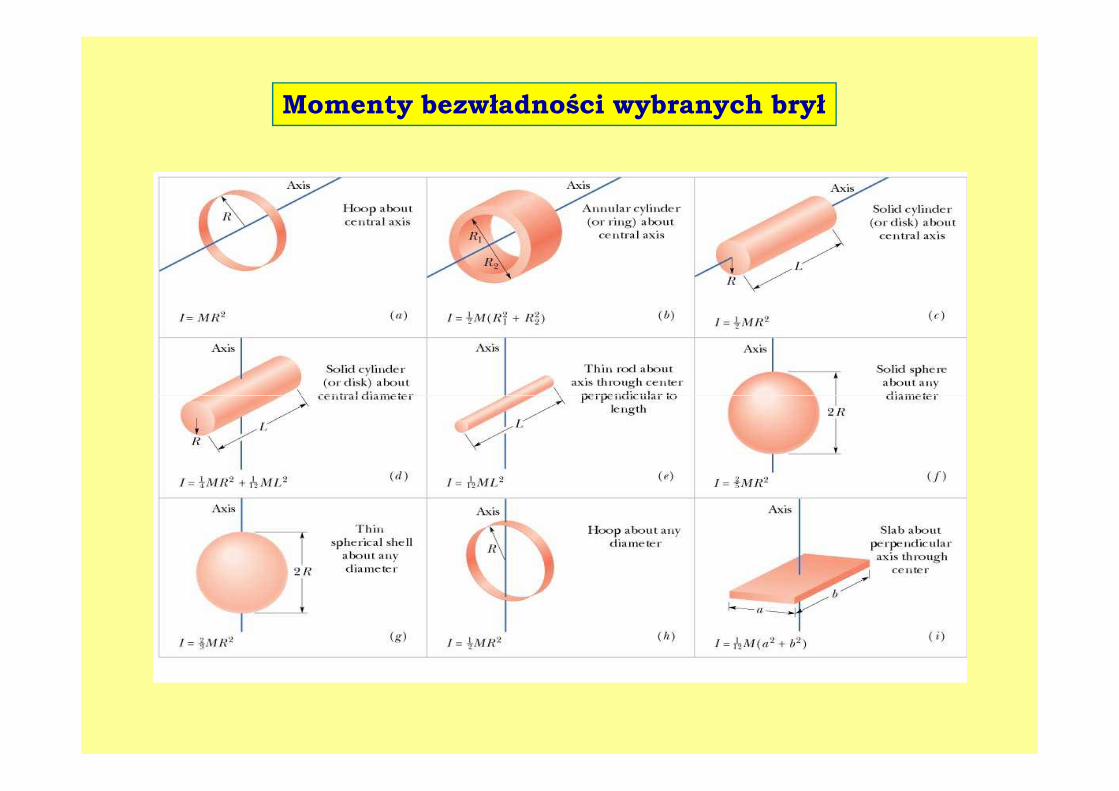
Momenty bezwładności wybranych brył
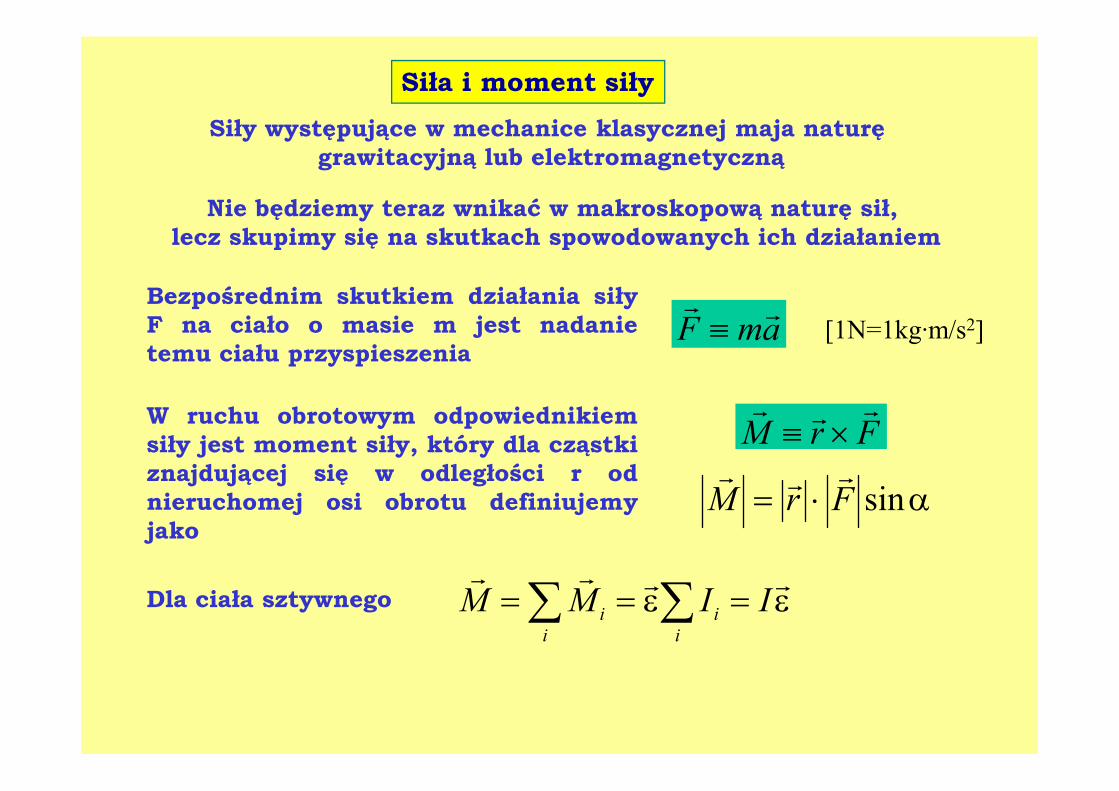
Siła i moment siły
Siły występujące w mechanice klasycznej maja naturę grawitacyjną lub elektromagnetyczną
Nie będziemy teraz wnikać w makroskopową naturę sił, lecz skupimy się na skutkach spowodowanych ich działaniem
Bezpośrednim skutkiem działania siłyF na ciało o masie m jest nadanietemu ciału przyspieszenia
amFrr
≡ [1N=1kg·m/s2]
W ruchu obrotowym odpowiednikiemsiły jest moment siły, który dla cząstkiznajdującej się w odległości r odnieruchomej osi obrotu definiujemyjako
FrMrrr×≡
α⋅= sinFrMrrr
Dla ciała sztywnego ε=ε== ∑∑rrrrIIMM
i
i
i
i
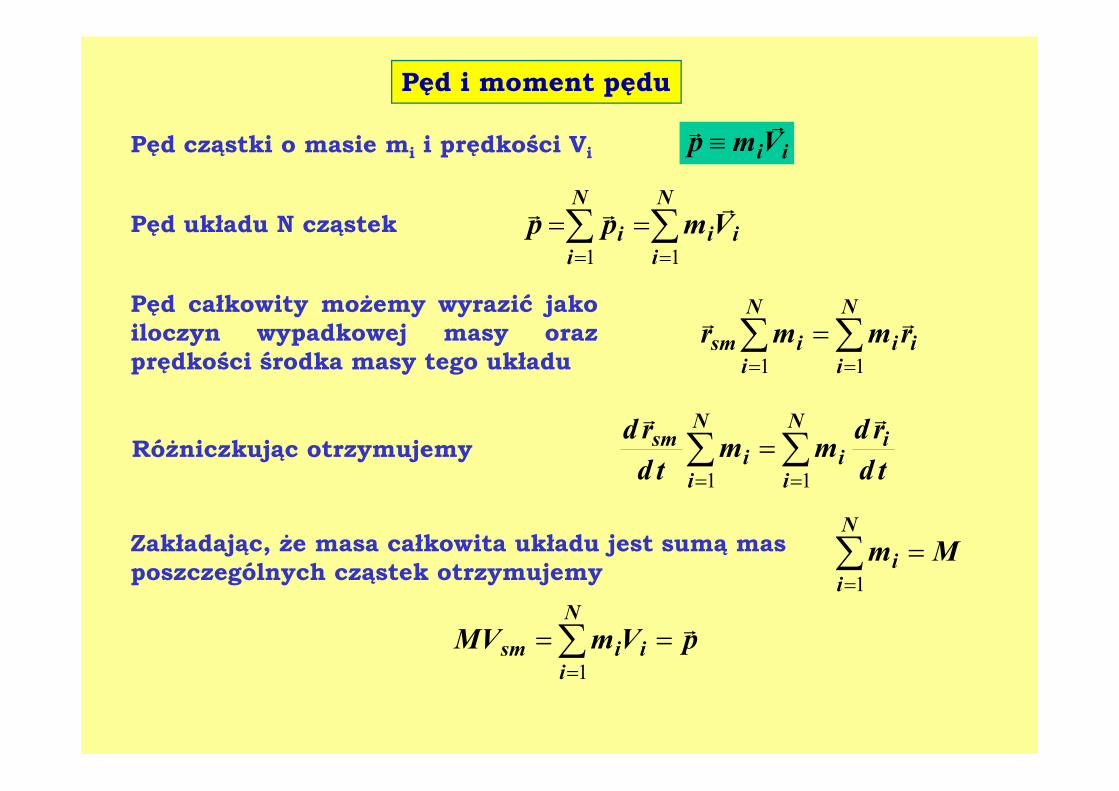
Pęd i moment pędu
Pęd cząstki o masie mi i prędkości Vi iiVmprr ≡
Pęd układu N cząstek ∑∑==
==N
iii
N
ii Vmpp
11
rrr
Pęd całkowity możemy wyrazić jakoiloczyn wypadkowej masy orazprędkości środka masy tego układu
∑∑==
=N
iii
N
iism rmmr
11
rr
Różniczkując otrzymujemy ∑∑==
=N
i
ii
N
ii
sm
td
rdmm
td
rd
11
rr
MmN
ii =∑
=1
Zakładając, że masa całkowita układu jest sumą mas poszczególnych cząstek otrzymujemy
pVmMVN
iiism
r==∑=1
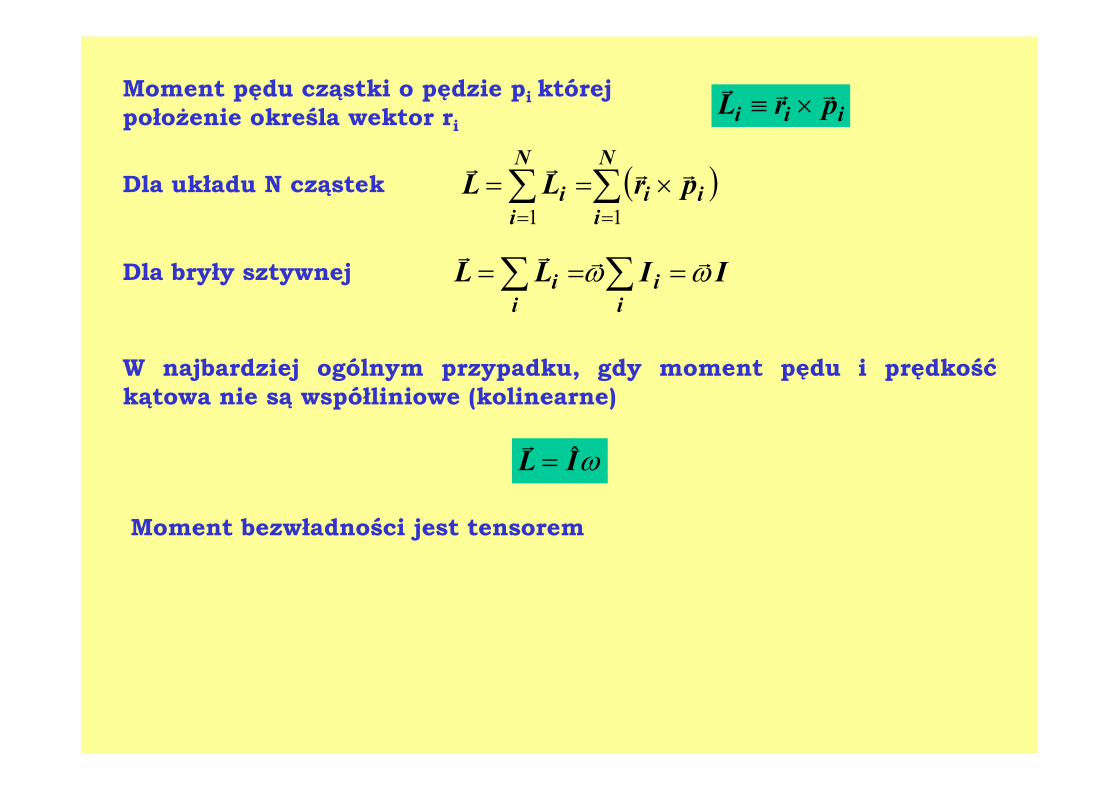
Moment pędu cząstki o pędzie pi której położenie określa wektor ri iii prL
rrr×≡
Dla układu N cząstek ( )∑∑==
×==N
iii
N
ii prLL
11
rrrr
Dla bryły sztywnej IILLi
ii
i ωω rrrr=== ∑∑
W najbardziej ogólnym przypadku, gdy moment pędu i prędkośćkątowa nie są współliniowe (kolinearne)kątowa nie są współliniowe (kolinearne)
ωIL ˆ=r
Moment bezwładności jest tensorem
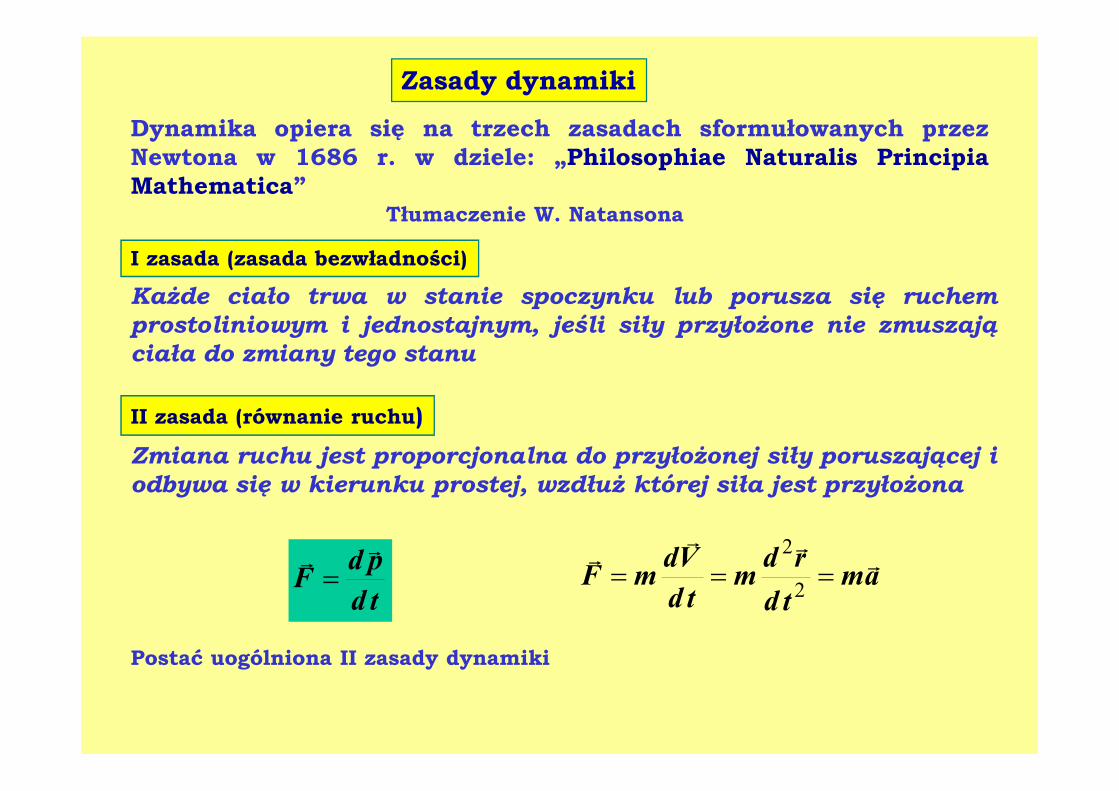
Zasady dynamiki
Dynamika opiera się na trzech zasadach sformułowanych przezNewtona w 1686 r. w dziele: „Philosophiae Naturalis PrincipiaMathematica”
I zasada (zasada bezwładności)
Każde ciało trwa w stanie spoczynku lub porusza się ruchemprostoliniowym i jednostajnym, jeśli siły przyłożone nie zmuszająciała do zmiany tego stanu
Tłumaczenie W. Natansona
II zasada (równanie ruchu)
Zmiana ruchu jest proporcjonalna do przyłożonej siły poruszającej iodbywa się w kierunku prostej, wzdłuż której siła jest przyłożona
td
rr= am
td
rdm
td
VdmF
rrr
r===
2
2
Postać uogólniona II zasady dynamiki
III zasada (zasada akcji i reakcji)
Względem każdego działania (akcji) istnieje równe muprzeciwdziałanie (reakcja) skierowane przeciwnie, tj. wzajemnedziałania dwóch ciał są zawsze równe sobie i skierowaneprzeciwnie
1221 →→ −= FFrr
II zasada dynamiki w ruchu obrotowym
FrMLd rrrr
×== FrMtd
Ld rrr×==
Dla bryły sztywnejεIM ˆ=
r
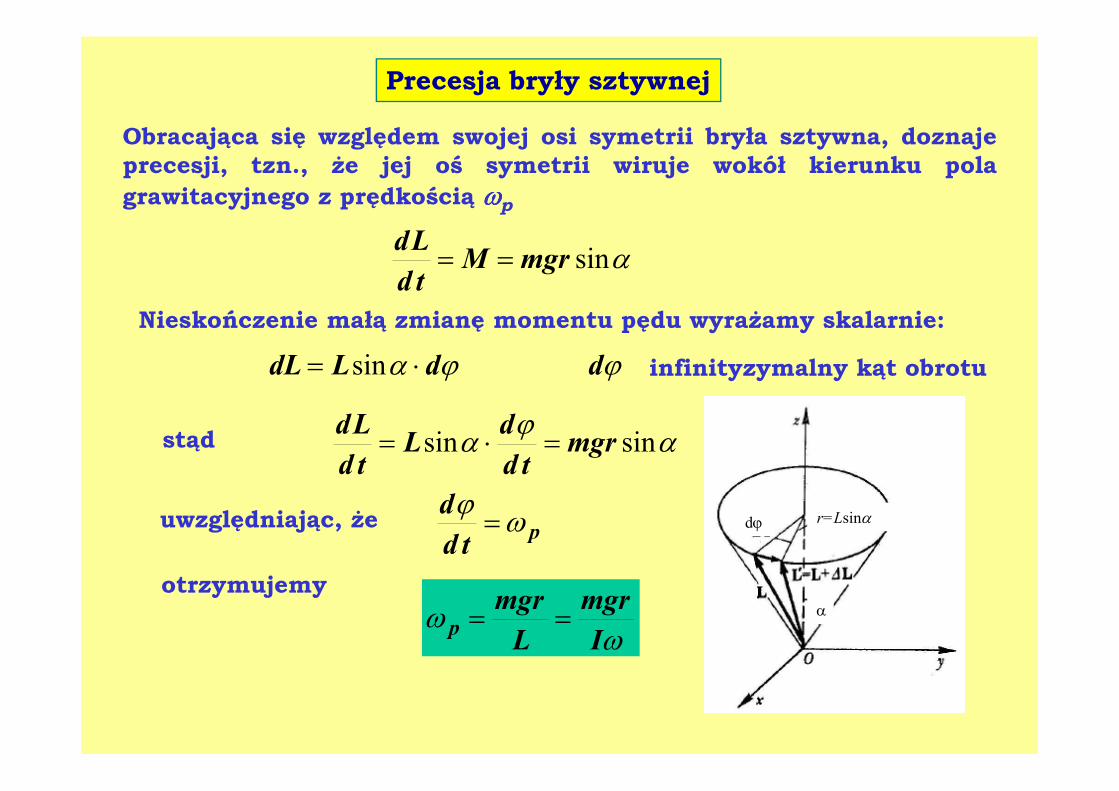
Precesja bryły sztywnej
Obracająca się względem swojej osi symetrii bryła sztywna, doznajeprecesji, tzn., że jej oś symetrii wiruje wokół kierunku polagrawitacyjnego z prędkością ωωωωp
αsinmgrMtd
Ld==
Nieskończenie małą zmianę momentu pędu wyrażamy skalarnie:
ϕα dLdL ⋅= sin ϕd infinityzymalny kąt obrotu
αϕ
α sinsin mgrtd
dL
td
Ld=⋅=stąd
uwzględniając, żep
td
dω
ϕ=
otrzymujemy
ωω
I
mgr
L
mgrp == α
r=Lsinαdϕ
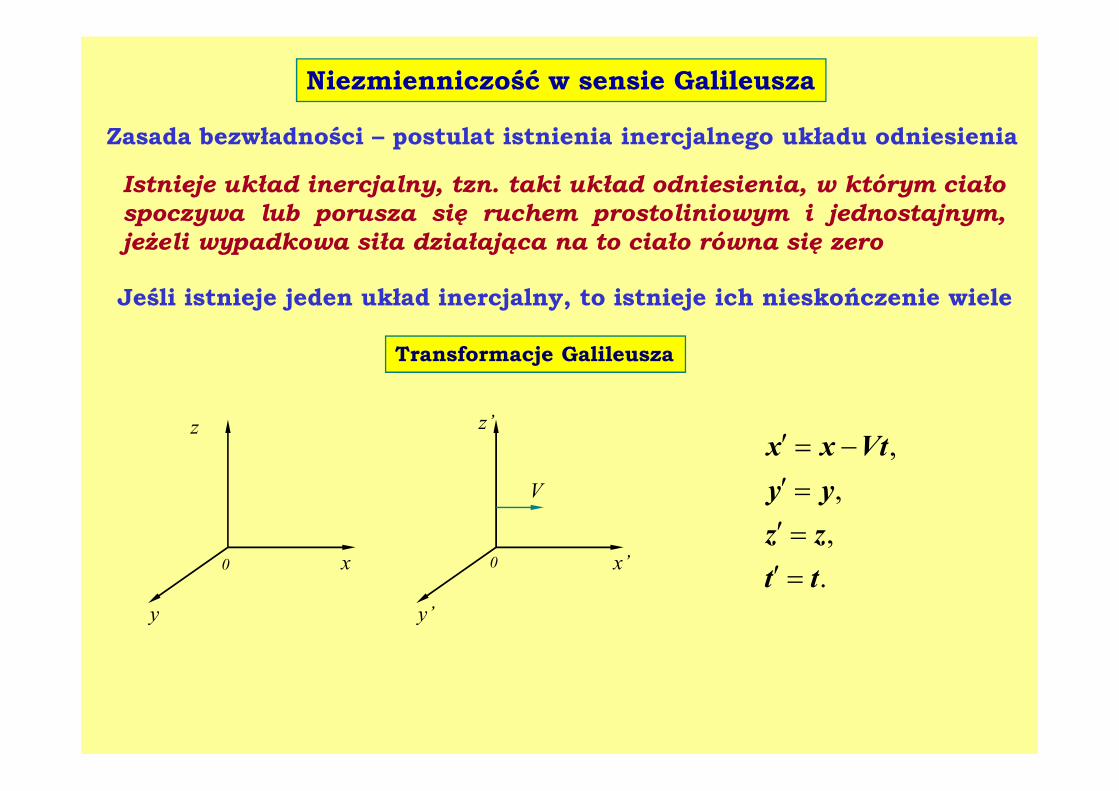
Niezmienniczość w sensie Galileusza
Zasada bezwładności – postulat istnienia inercjalnego układu odniesienia
Istnieje układ inercjalny, tzn. taki układ odniesienia, w którym ciałospoczywa lub porusza się ruchem prostoliniowym i jednostajnym,jeżeli wypadkowa siła działająca na to ciało równa się zero
Jeśli istnieje jeden układ inercjalny, to istnieje ich nieskończenie wiele
Transformacje Galileusza
.
,
,
,
tt
zz
yy
Vtxx
=′
=′
=′
−=′z
x
y
0
y’
0
z’
x’
V
constmm =′=td
Vdm
td
Vdm xx
′′
= xx FF ′=
Różniczkując i mnożąc przez masę otrzymujemy
VVV xx +′=
( ) Vtd
xdVtx
td
d
td
xd−=−
′=′′
xVtd
xd ′=′
xVtd
xd=
Po zróżniczkowaniu pierwszego równania
Ruch jednostajny prostoliniowy jednego układu odniesienia względem innego inercjalnego układu nie wpływa na zmianę siły !!!
tdtd ′
Siła jest niezmiennicza względem transformacji Galileusza !!!
Zasada względności Galileusza stanowi, że w układach inercjalnych, w tych samych warunkach, zjawiska mechaniczne przebiegają jednakowo
Układy inercjalne i nieinercjalne
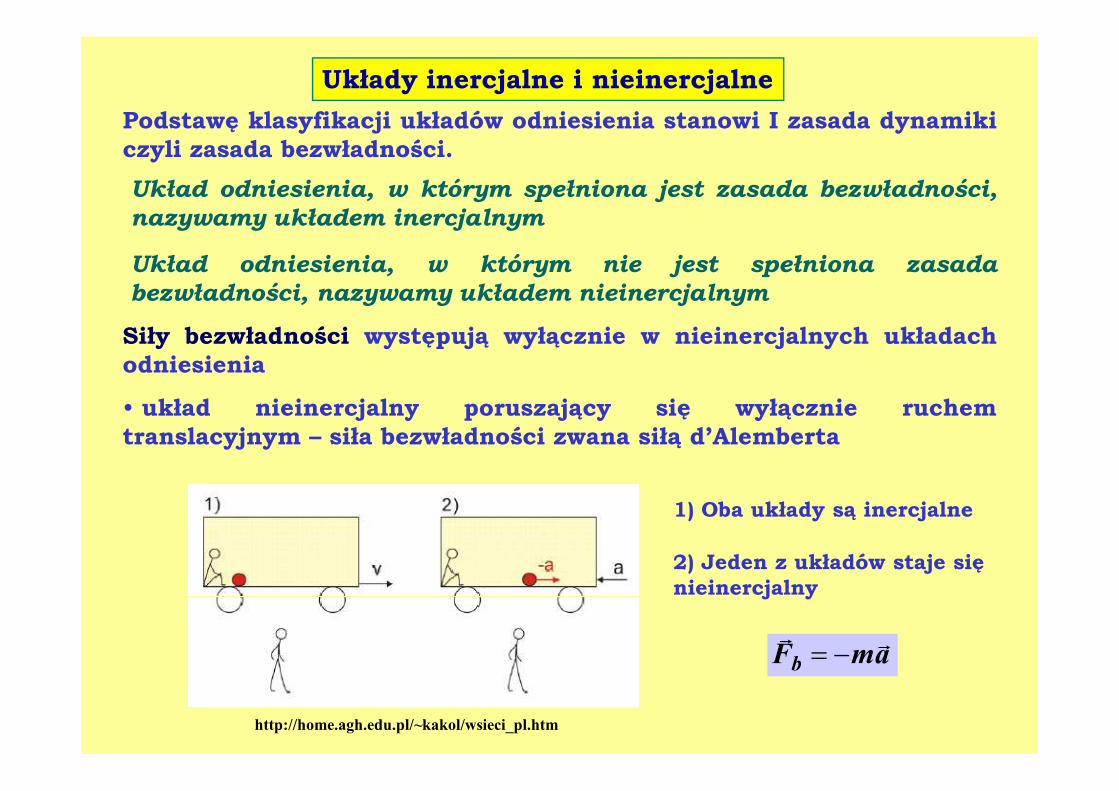
Podstawę klasyfikacji układów odniesienia stanowi I zasada dynamikiczyli zasada bezwładności.
Układ odniesienia, w którym spełniona jest zasada bezwładności,nazywamy układem inercjalnym
Układ odniesienia, w którym nie jest spełniona zasadabezwładności, nazywamy układem nieinercjalnym
Siły bezwładności występują wyłącznie w nieinercjalnych układachodniesienia
• układ nieinercjalny poruszający się wyłącznie ruchem• układ nieinercjalny poruszający się wyłącznie ruchemtranslacyjnym – siła bezwładności zwana siłą d’Alemberta
amFbrr
−=
1) Oba układy są inercjalne
2) Jeden z układów staje się nieinercjalny
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
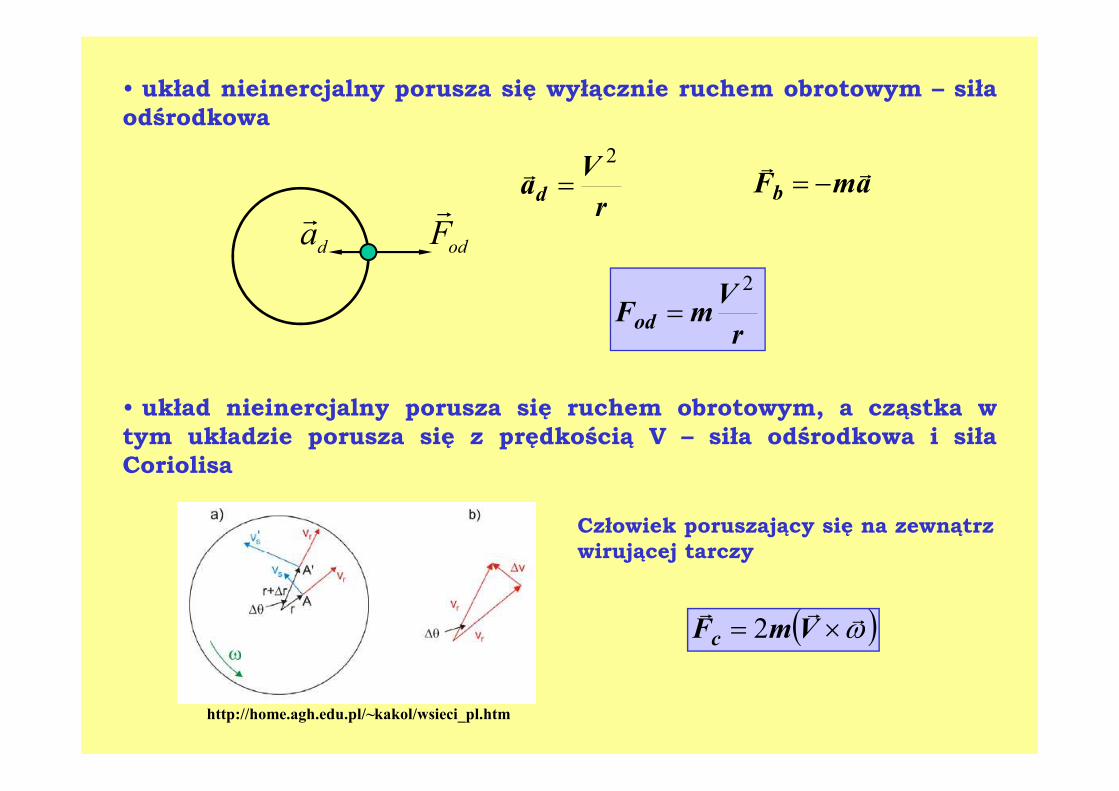
• układ nieinercjalny porusza się ruchem obrotowym, a cząstka w
• układ nieinercjalny porusza się wyłącznie ruchem obrotowym – siłaodśrodkowa
dar
odFr r
Vad
2
=r
r
VmFod
2
=
amFbrr
−=
( )ωrrr×= VmFc 2
• układ nieinercjalny porusza się ruchem obrotowym, a cząstka wtym układzie porusza się z prędkością V – siła odśrodkowa i siłaCoriolisa
Człowiek poruszający się na zewnątrz wirującej tarczy
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
Siły tarciaRr
Qr
Tr
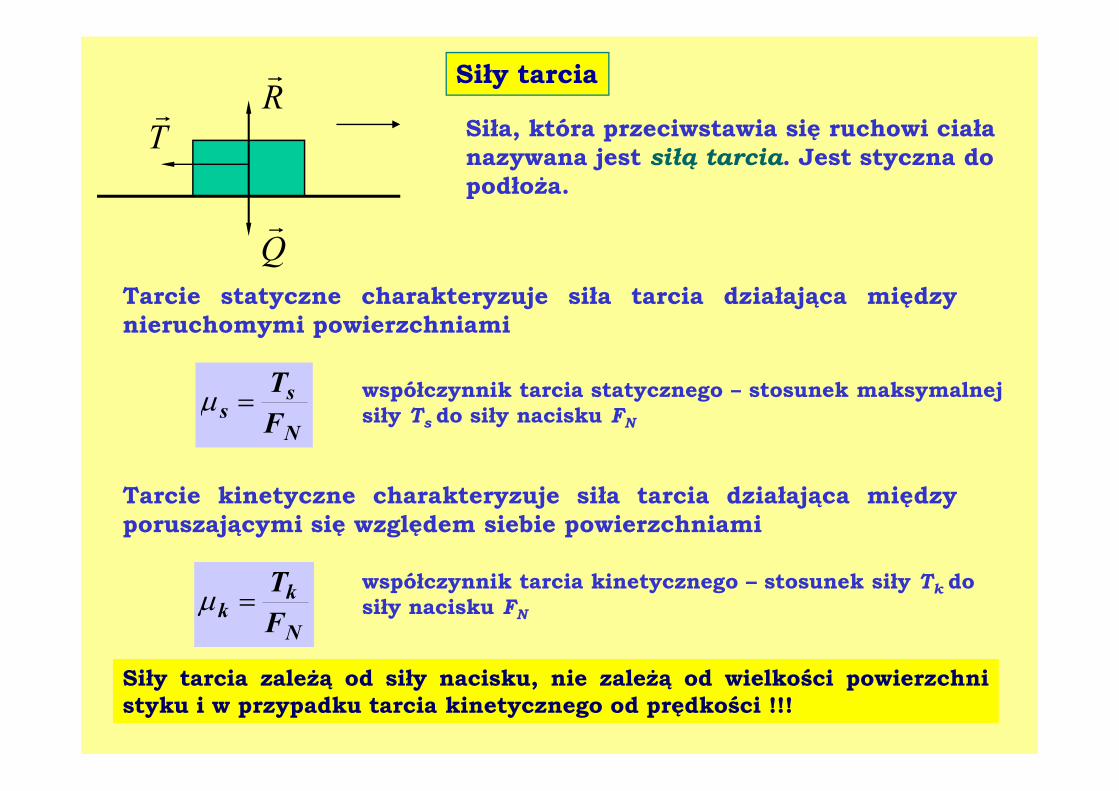
Siła, która przeciwstawia się ruchowi ciała nazywana jest siłą tarcia. Jest styczna do podłoża.
Tarcie statyczne charakteryzuje siła tarcia działająca międzynieruchomymi powierzchniami
sT=µ współczynnik tarcia statycznego – stosunek maksymalnej
N
ss
F
T=µ współczynnik tarcia statycznego – stosunek maksymalnej
siły Ts do siły nacisku FN
Tarcie kinetyczne charakteryzuje siła tarcia działająca międzyporuszającymi się względem siebie powierzchniami
N
kk
F
T=µ
współczynnik tarcia kinetycznego – stosunek siły Tk do siły nacisku FN
Siły tarcia zależą od siły nacisku, nie zależą od wielkości powierzchnistyku i w przypadku tarcia kinetycznego od prędkości !!!
Praca, moc i energia
α
F sinα
F cosα
F
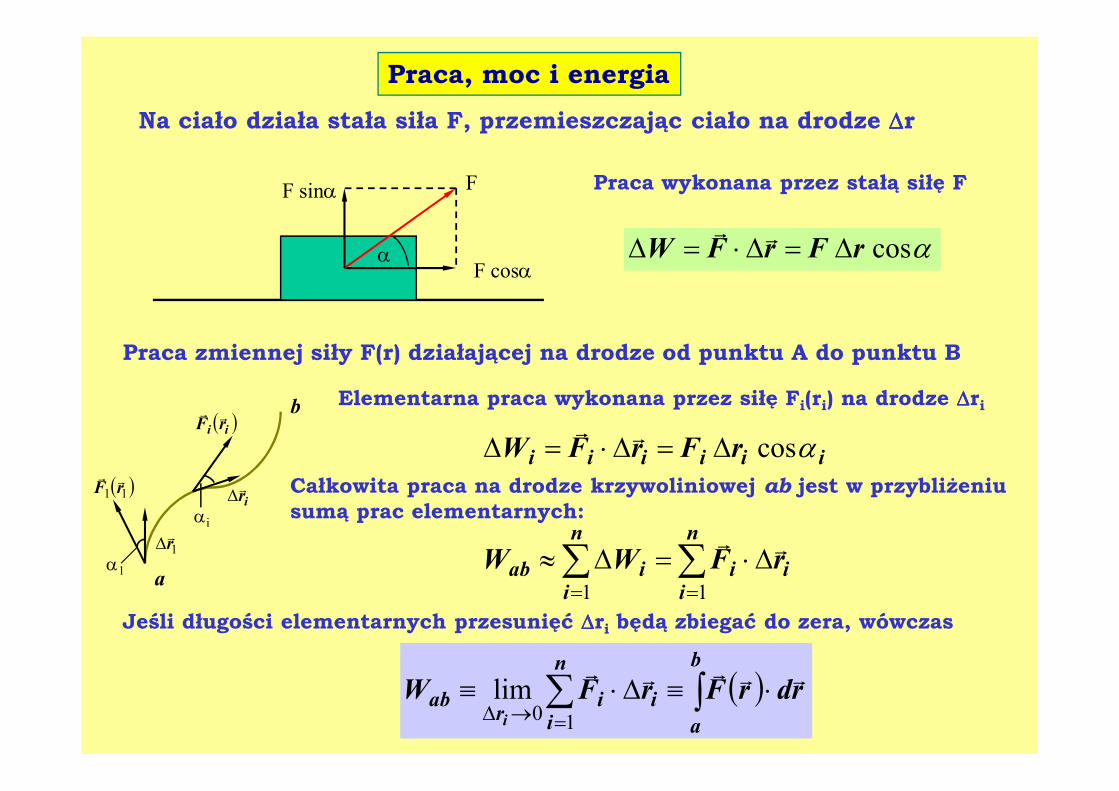
Na ciało działa stała siła F, przemieszczając ciało na drodze ∆∆∆∆r
αcosrFrFW ∆=∆⋅=∆ rr
Praca wykonana przez stałą siłę F
Praca zmiennej siły F(r) działającej na drodze od punktu A do punktu B
Elementarna praca wykonana przez siłę F (r ) na drodze ∆∆∆∆rb Elementarna praca wykonana przez siłę Fi(ri) na drodze ∆∆∆∆ri
iiiiii rFrFW αcos∆=∆⋅=∆ rr
aα1
1rr∆
( )11 rFrr
irr∆
( )ii rFrr
αi
b
Całkowita praca na drodze krzywoliniowej ab jest w przybliżeniu sumą prac elementarnych:
∑ ∑= =
∆⋅=∆≈n
i
n
iiiiab rFWW
1 1
rr
Jeśli długości elementarnych przesunięć ∆∆∆∆ri będą zbiegać do zera, wówczas
( ) rdrFrFW
b
a
n
iii
rab
i
rrrrr⋅≡∆⋅≡ ∫∑
=→∆ 10lim
a b
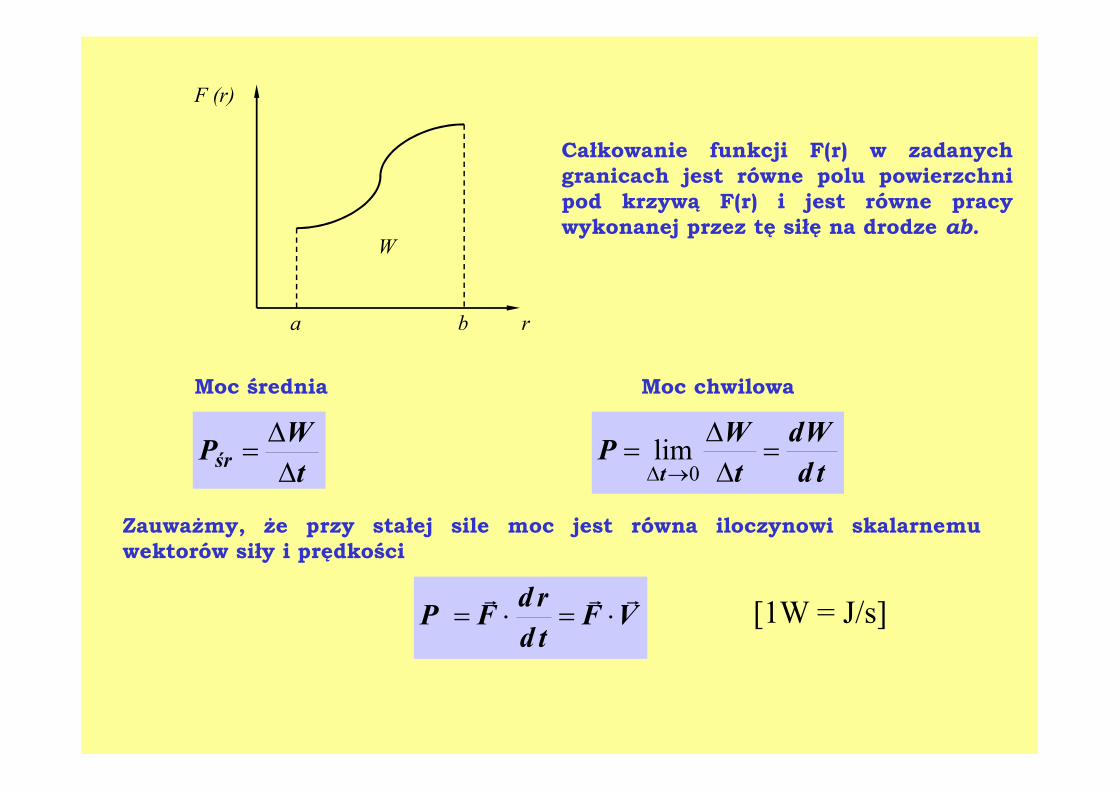
F (r)
r
W
Całkowanie funkcji F(r) w zadanychgranicach jest równe polu powierzchnipod krzywą F(r) i jest równe pracywykonanej przez tę siłę na drodze ab.
Moc średnia Moc chwilowaMoc średnia
t
WPśr ∆
∆=
Moc chwilowa
td
Wd
t
WP
t=
∆∆
=→∆ 0
lim
Zauważmy, że przy stałej sile moc jest równa iloczynowi skalarnemuwektorów siły i prędkości
VFtd
rdFP
rrr⋅=⋅= [1W = J/s]
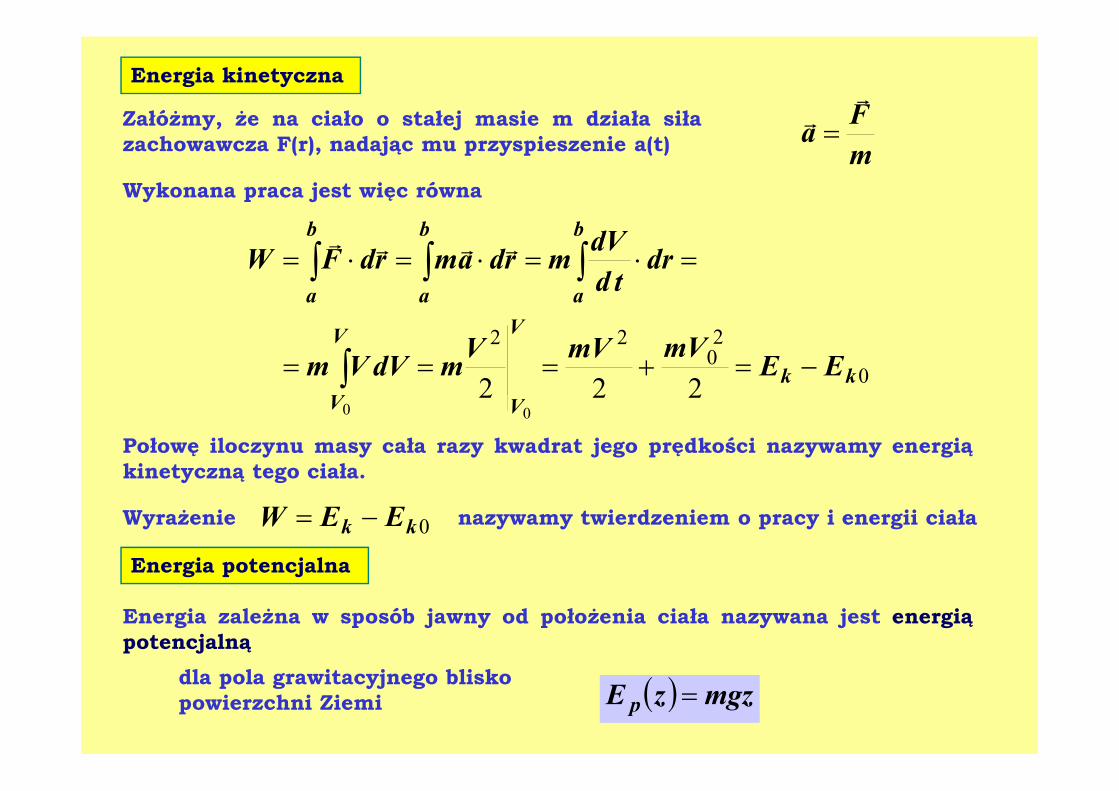
Energia kinetyczna
Załóżmy, że na ciało o stałej masie m działa siłazachowawcza F(r), nadając mu przyspieszenie a(t) m
Fa
rr =
Wykonana praca jest więc równa
0
20
22
222kk
V
V
V
V
b
a
b
a
b
a
EEmVmVV
mdVVm
drtd
dVmrdamrdFW
−=+===
=⋅=⋅=⋅=
∫
∫ ∫ ∫rrrr
Energia potencjalna
Połowę iloczynu masy cała razy kwadrat jego prędkości nazywamy energiąkinetyczną tego ciała.
22200 VV
Wyrażenie 0kk EEW −= nazywamy twierdzeniem o pracy i energii ciała
Energia zależna w sposób jawny od położenia ciała nazywana jest energiąpotencjalną
dla pola grawitacyjnego blisko powierzchni Ziemi ( ) mgzzE p =
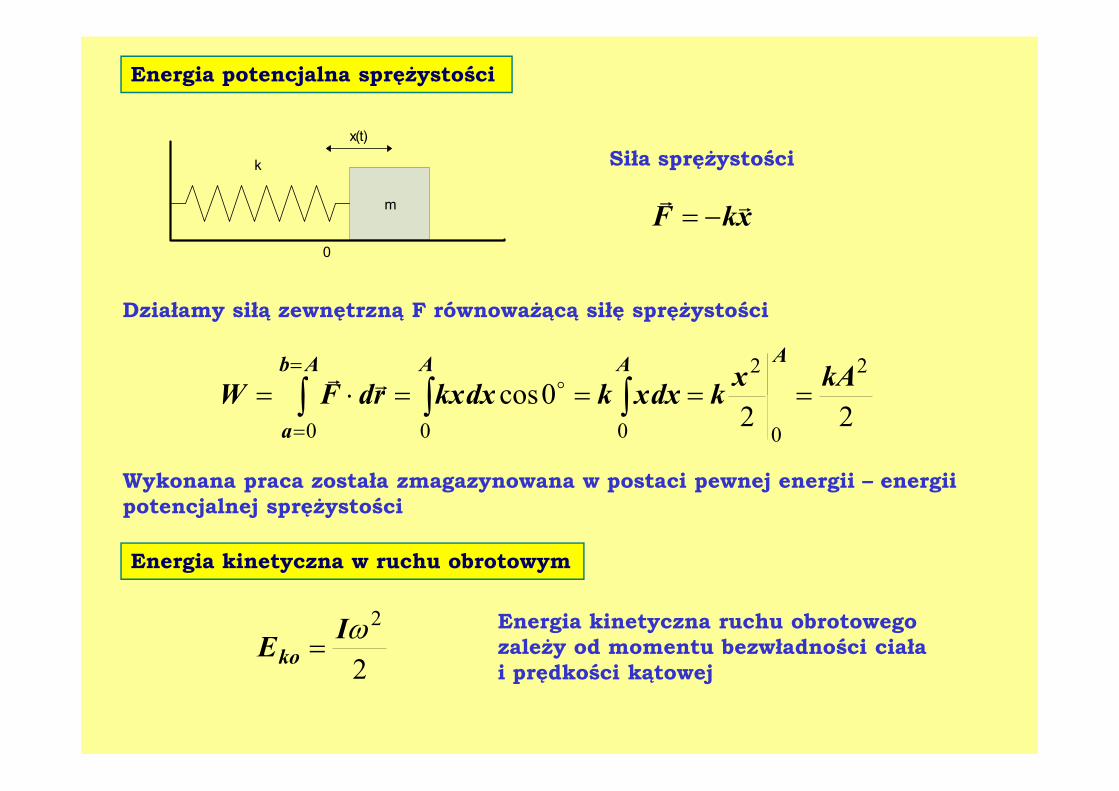
Energia potencjalna sprężystości
m
k
x(t)
0
xkFrr
−=
Siła sprężystości
Działamy siłą zewnętrzną F równoważącą siłę sprężystości
0cos22
kAxkdxxkdxkxrdFW
AAb A A
====⋅= ∫ ∫ ∫=
orr
220cos
00 0 0
kdxxkdxkxrdFW
a
====⋅= ∫ ∫ ∫=
Wykonana praca została zmagazynowana w postaci pewnej energii – energii potencjalnej sprężystości
Energia kinetyczna w ruchu obrotowym
2
2ωIEko =
Energia kinetyczna ruchu obrotowego zależy od momentu bezwładności ciała i prędkości kątowej
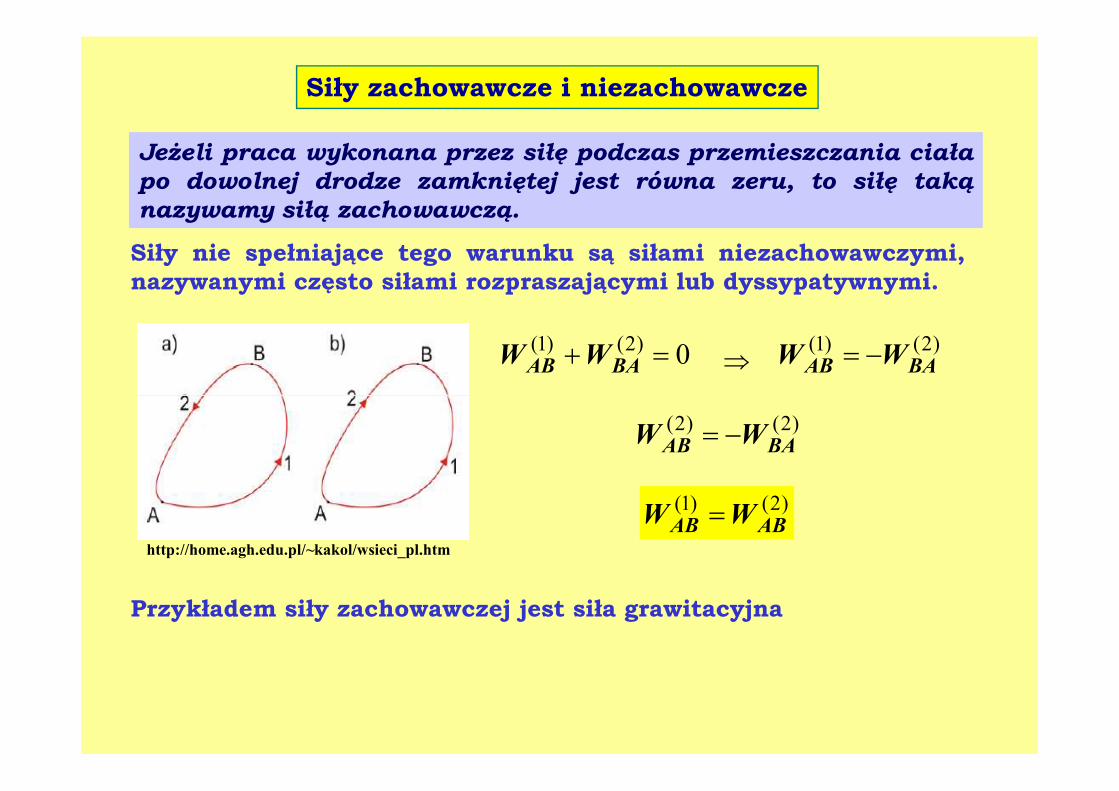
Siły zachowawcze i niezachowawcze
Jeżeli praca wykonana przez siłę podczas przemieszczania ciałapo dowolnej drodze zamkniętej jest równa zeru, to siłę takąnazywamy siłą zachowawczą.
Siły nie spełniające tego warunku są siłami niezachowawczymi,nazywanymi często siłami rozpraszającymi lub dyssypatywnymi.
0)2()1( =+ BAAB WW ⇒
)2()1(BAAB WW −=
)2()2(BAAB WW −=
)2()1(ABAB WW =
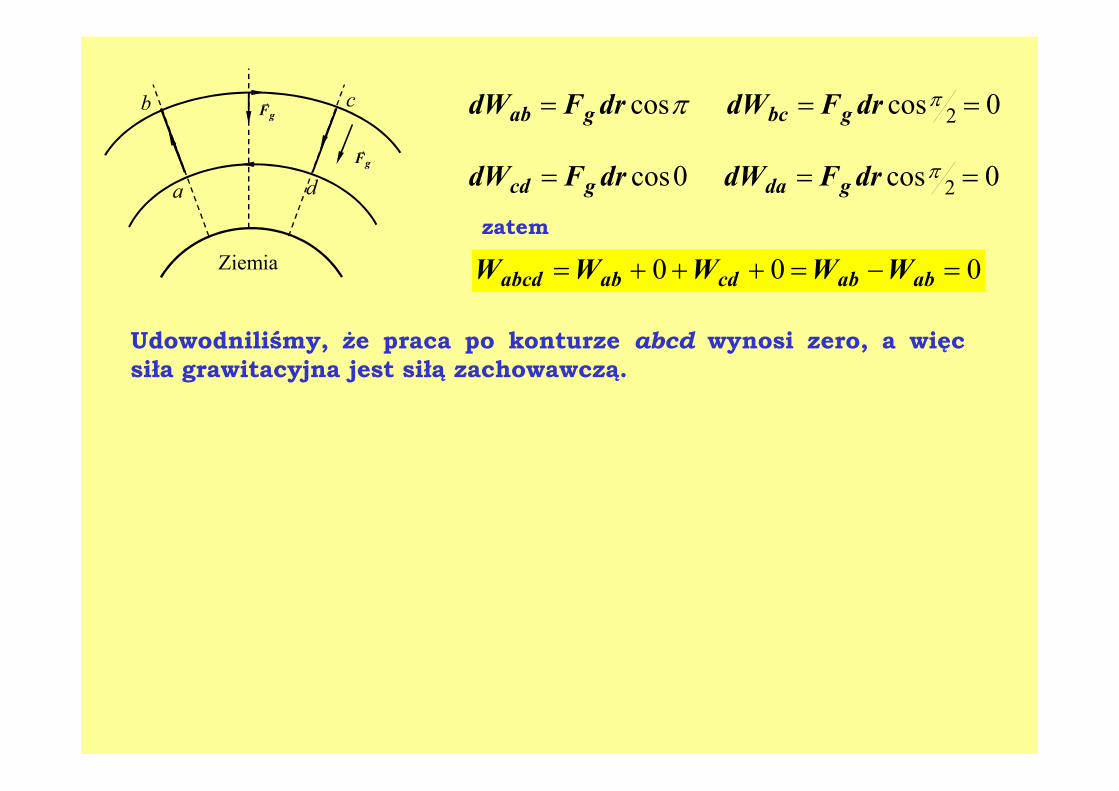
Przykładem siły zachowawczej jest siła grawitacyjna
http://home.agh.edu.pl/~kakol/wsieci_pl.htm
gFr
gFr
a
b c
d
Ziemia
πcosdrFdW gab =
0cosdrFdW gcd =
0cos 2 == πdrFdW gbc
0cos 2 == πdrFdW gda
zatem
000 =−=+++= ababcdababcd WWWWW
Udowodniliśmy, że praca po konturze abcd wynosi zero, a więcsiła grawitacyjna jest siłą zachowawczą.
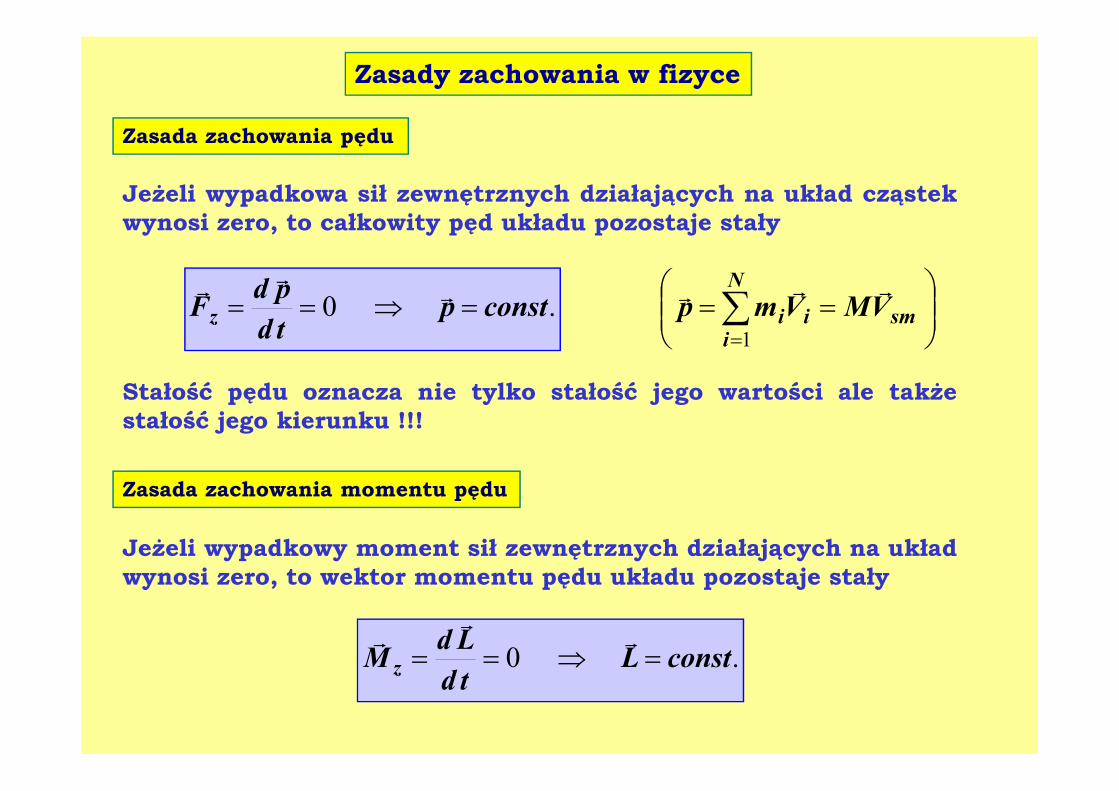
Zasady zachowania w fizyce
Zasada zachowania pędu
Jeżeli wypadkowa sił zewnętrznych działających na układ cząstekwynosi zero, to całkowity pęd układu pozostaje stały
.0 constptd
pdFz =⇒== r
rr
==∑
=sm
N
iii VMVmp
rrr
1
Stałość pędu oznacza nie tylko stałość jego wartości ale takżeStałość pędu oznacza nie tylko stałość jego wartości ale takżestałość jego kierunku !!!
Zasada zachowania momentu pędu
.0 constLtd
LdM z =⇒==
rr
r
Jeżeli wypadkowy moment sił zewnętrznych działających na układwynosi zero, to wektor momentu pędu układu pozostaje stały

Zasada zachowania energii mechanicznej mówi, ze suma energiipotencjalnej i kinetycznej ciała jest wielkością stałą
Zasada zachowania energii mechanicznej
Zasada ta jest słuszna tylko wtedy, gdy wypadkowa siła działającana ciało (układ) jest siłą zachowawczą
( ) .2
0
2
constEmV
rE p ==+
Przykład
m
k
x(t)
0
Oscylator harmoniczny prosty
=+=+22
22mVkx
EE kp
( ) tAtx ωsin=
( ) ( )tA
td
txdtV ωω cos==
=+= tAm
tAk
ωωω 22222 cos2
sin2
( ) .2
cossin2
0
222
2
constEkA
ttkA
===+= ωω
Inne zasady zachowania i ich rola w fizyce
Ogólna zasada zachowania energii głosi, że całkowita energia układuizolowanego jest wielkością stałą, a pomiędzy poszczególnymirodzajami energii mogą zachodzić przemiany
Zasada zachowania masy – całkowita masa układu zamkniętego jestwielkością stałą
Zasada zachowania energii-masy – równoważność energii i masy
2mcE =mcE =
Zasada zachowania ładunku – we wszystkich zjawiskach związanych zprzemieszczaniem się ładunków elektrycznych w zamkniętymukładzie wzajemnie oddziałujących ciał, algebraiczna sumawszystkich ładunków elektrycznych pozostaje stała
.1
constqQn
ii ==∑
=
Zasada zachowania liczby leptonowej i barionowej
W układzie zamkniętym suma liczb leptonowych ΣΣΣΣLi i liczb barionowychΣΣΣΣBi pozostaje stała niezależnie od przebiegających procesów
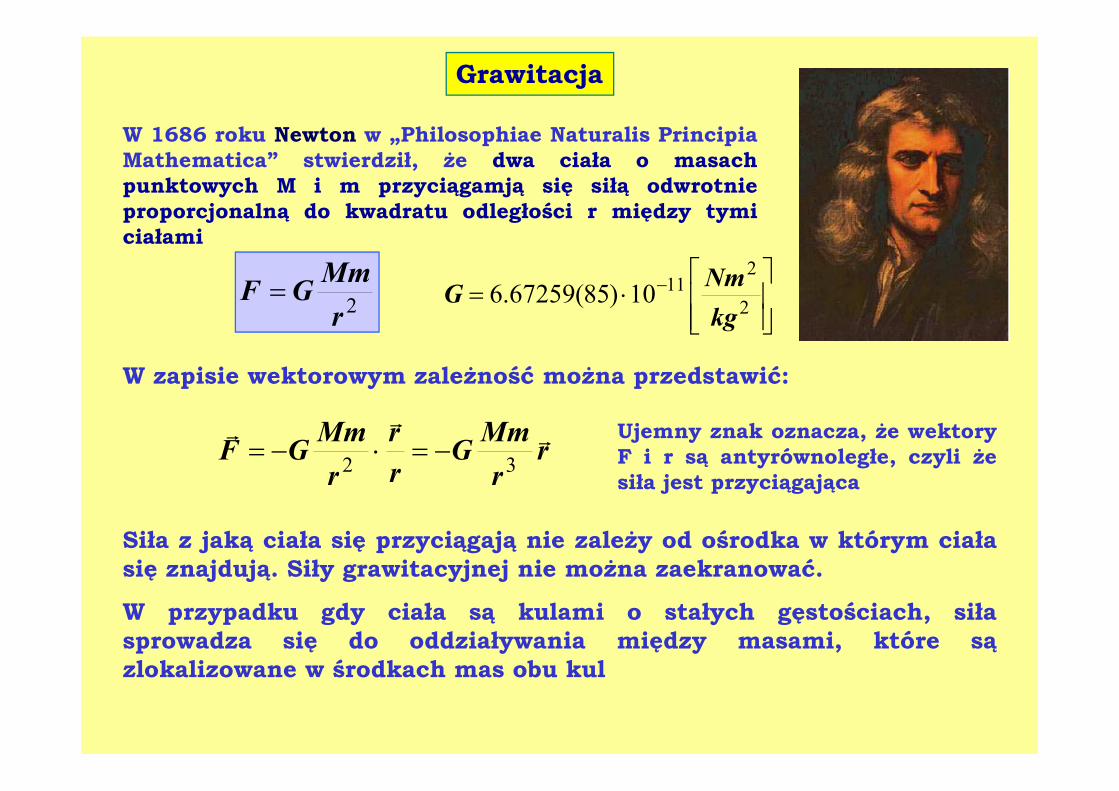
Grawitacja
W 1686 roku Newton w „Philosophiae Naturalis PrincipiaMathematica” stwierdził, że dwa ciała o masachpunktowych M i m przyciągamją się siłą odwrotnieproporcjonalną do kwadratu odległości r między tymiciałami
2r
MmGF =
⋅= −
2
21110)85(67259.6
kg
NmG
W zapisie wektorowym zależność można przedstawić:
rr
MmG
r
r
r
MmGF
rr
r
32−=⋅−=
Ujemny znak oznacza, że wektoryF i r są antyrównoległe, czyli żesiła jest przyciągająca
Siła z jaką ciała się przyciągają nie zależy od ośrodka w którym ciałasię znajdują. Siły grawitacyjnej nie można zaekranować.
W przypadku gdy ciała są kulami o stałych gęstościach, siłasprowadza się do oddziaływania między masami, które sązlokalizowane w środkach mas obu kul
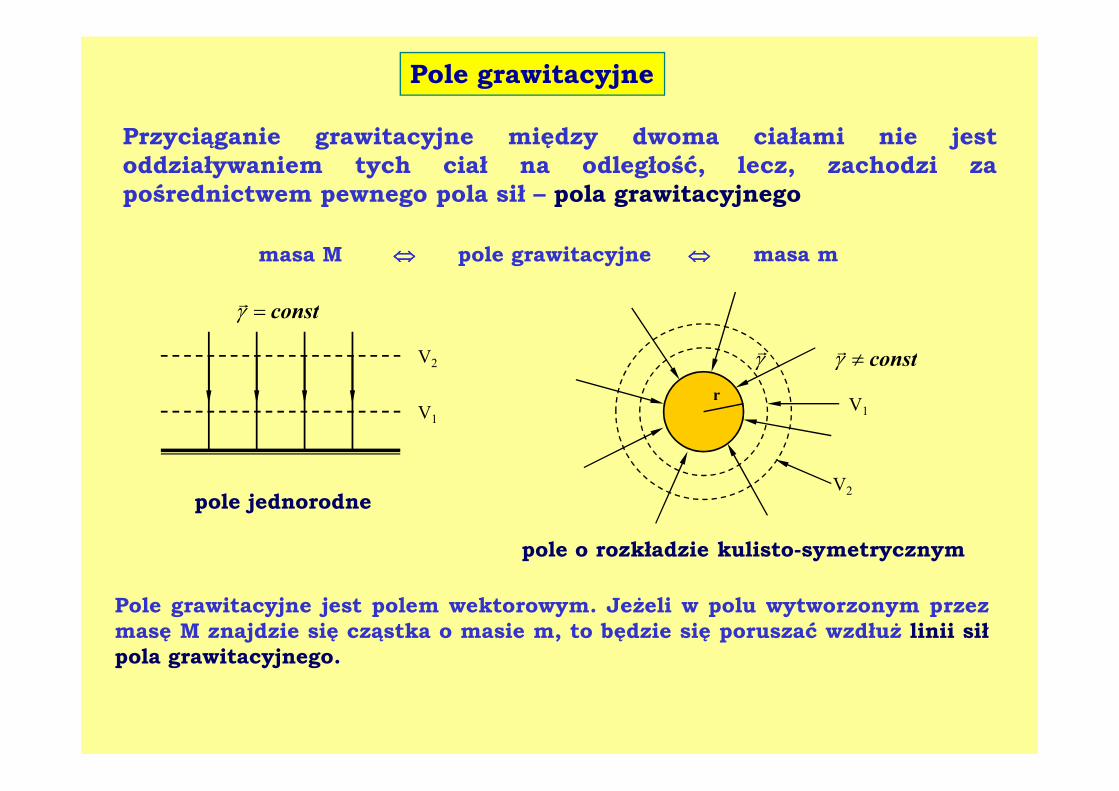
Pole grawitacyjne
Przyciąganie grawitacyjne między dwoma ciałami nie jestoddziaływaniem tych ciał na odległość, lecz, zachodzi zapośrednictwem pewnego pola sił – pola grawitacyjnego
masa M ⇔⇔⇔⇔ masa mpole grawitacyjne ⇔⇔⇔⇔
V2
const=γr
r
γr const≠γr
VV1
rV1
V2pole jednorodne
pole o rozkładzie kulisto-symetrycznym
Pole grawitacyjne jest polem wektorowym. Jeżeli w polu wytworzonym przezmasę M znajdzie się cząstka o masie m, to będzie się poruszać wzdłuż linii siłpola grawitacyjnego.
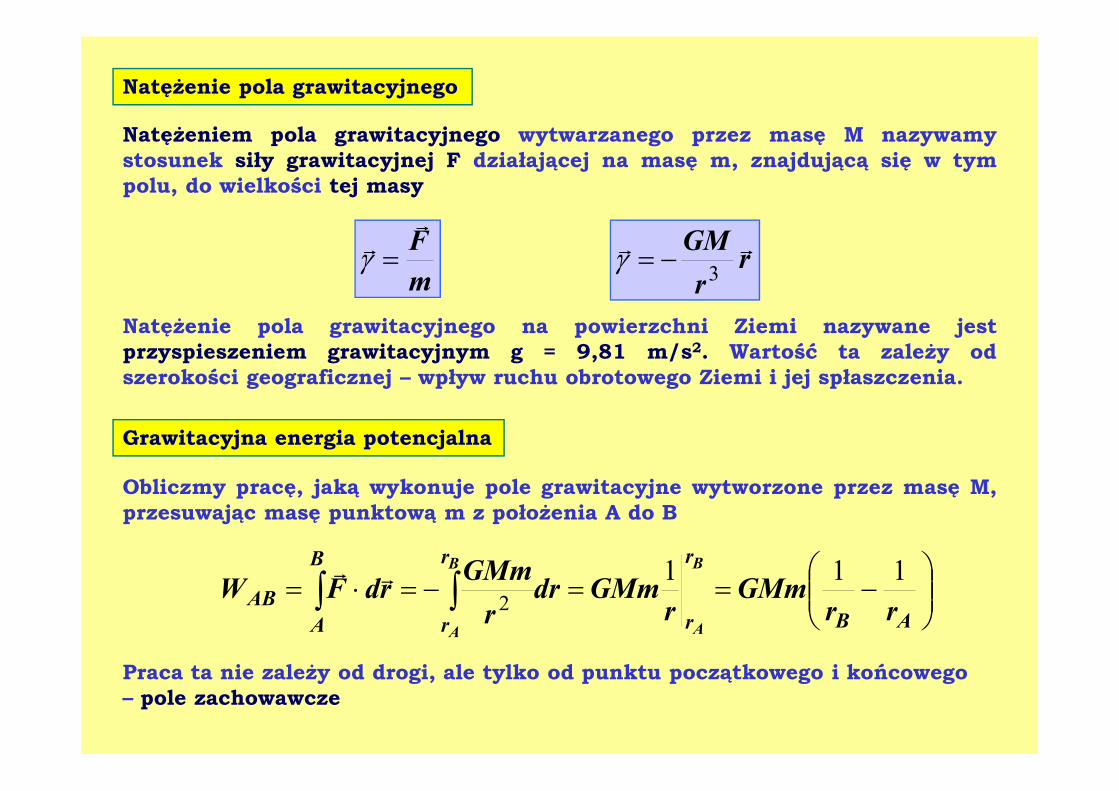
Natężenie pola grawitacyjnego
Natężeniem pola grawitacyjnego wytwarzanego przez masę M nazywamystosunek siły grawitacyjnej F działającej na masę m, znajdującą się w tympolu, do wielkości tej masy
m
Fr
r =γ rr
GM rr
3−=γ
Natężenie pola grawitacyjnego na powierzchni Ziemi nazywane jestprzyspieszeniem grawitacyjnym g = 9,81 m/s2. Wartość ta zależy odszerokości geograficznej – wpływ ruchu obrotowego Ziemi i jej spłaszczenia.
Grawitacyjna energia potencjalna
Obliczmy pracę, jaką wykonuje pole grawitacyjne wytworzone przez masę M,przesuwając masę punktową m z położenia A do B
−==−=⋅= ∫ ∫
AB
r
r
B
A
r
r
ABrr
GMmr
GMmdrr
GMmrdFW
B
A
B
A
1112
rr
Praca ta nie zależy od drogi, ale tylko od punktu początkowego i końcowego– pole zachowawcze
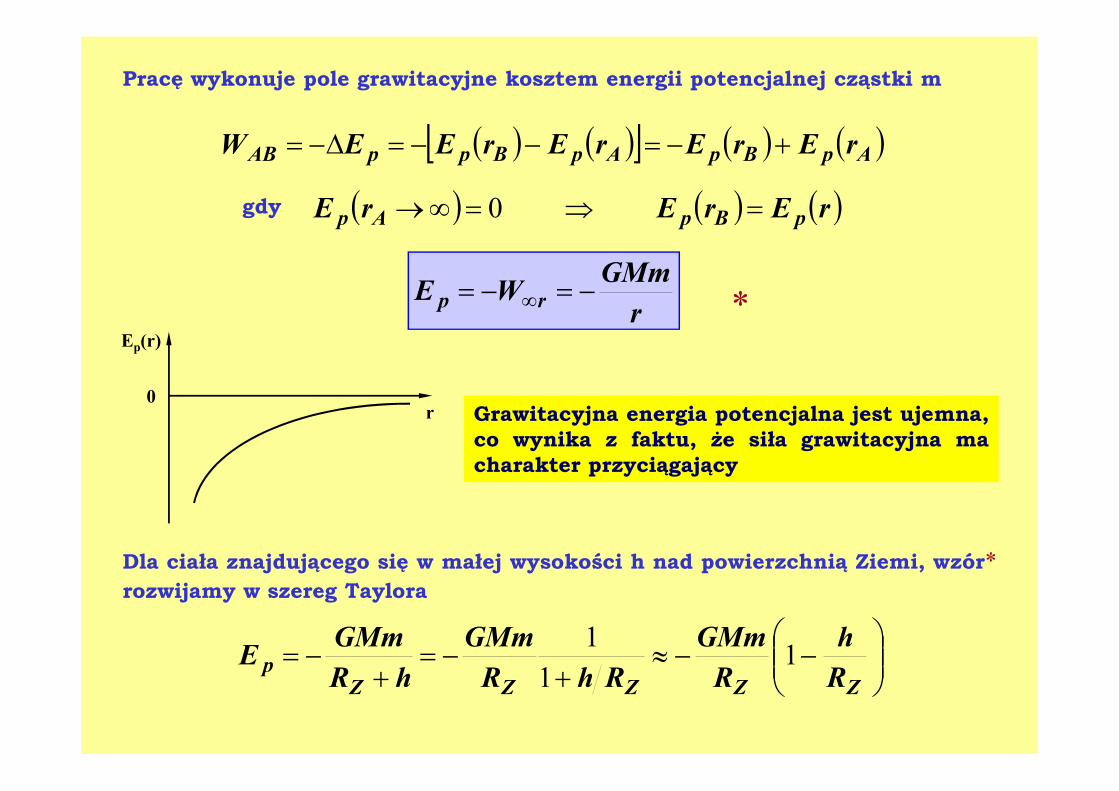
Pracę wykonuje pole grawitacyjne kosztem energii potencjalnej cząstki m
( ) ( )[ ] ( ) ( )ApBpApBppAB rErErErEEW +−=−−=∆−=
gdy ( ) ⇒=∞→ 0Ap rE ( ) ( )rErE pBp =
r
GMmWE rp −=−= ∞
Ep(r)
0
*
r0
Grawitacyjna energia potencjalna jest ujemna,co wynika z faktu, że siła grawitacyjna macharakter przyciągający
Dla ciała znajdującego się w małej wysokości h nad powierzchnią Ziemi, wzór*rozwijamy w szereg Taylora
−−≈
+−=
+−=
ZZZZZp
R
h
R
GMm
RhR
GMm
hR
GMmE 1
1
1
Ustalając poziom odniesienia energii potencjalnej na powierzchni Ziemi:
( ) ( ) mghmhR
GMREhREE
Z
ZpZpp ==−+=∆2
mghE p =
Potencjał grawitacyjny
Stosunek energii potencjalnej ciała do jego masy – potencjał grawitacyjny
E GM
m
EV
p=r
GMV −=
Miejsca geometryczne punktów pola grawitacyjnego o stałej wartościpotencjału nazywamy powierzchniami ekwipotencjalnymi
Między natężeniem pola grawitacyjnego i potencjałem istnieje ścisły związek
( )( )rV
m
rErdF
mrd
r
p
r
rr
rrrr −=−=⋅=⋅ ∫∫∞∞
1γ
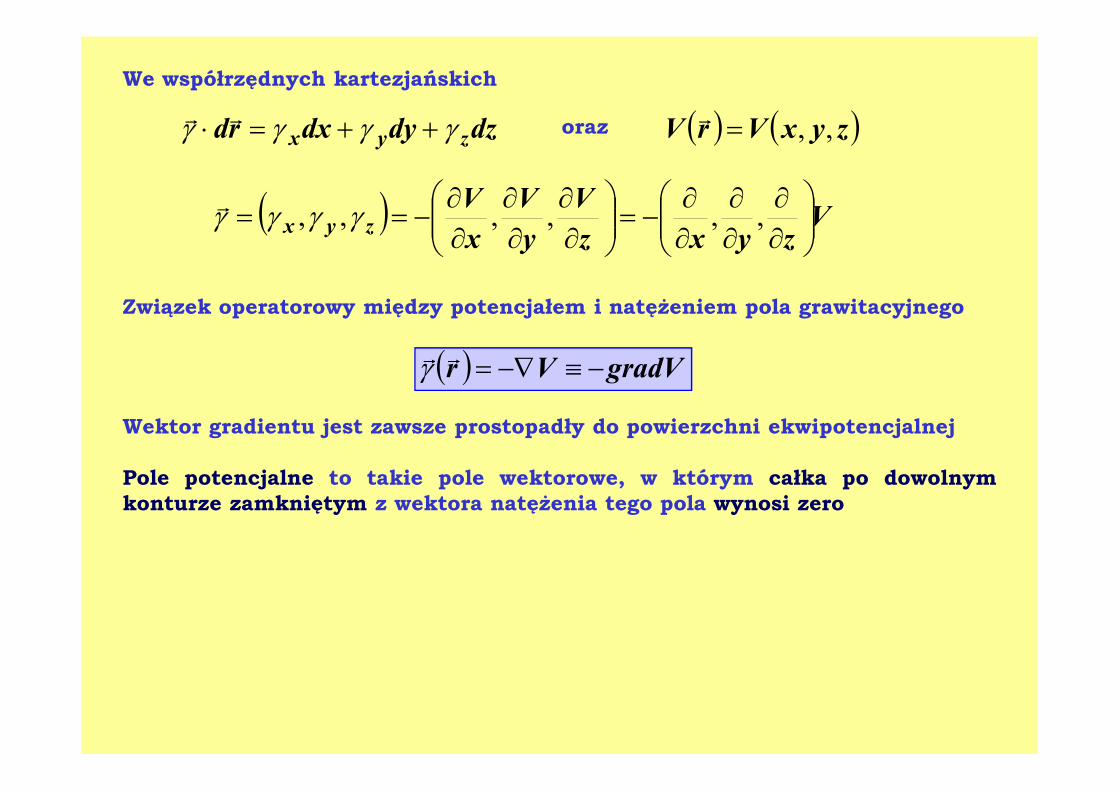
We współrzędnych kartezjańskich
dzdydxrd zyx γγγγ ++=⋅ rr oraz ( ) ( )zyxVrV ,,=r
( ) Vzyxz
V
y
V
x
Vzyx
∂∂
∂∂
∂∂
−=
∂∂
∂∂
∂∂
−== ,,,,,, γγγγr
Związek operatorowy między potencjałem i natężeniem pola grawitacyjnego
( ) gradVVr −≡−∇=rrγ
Pole potencjalne to takie pole wektorowe, w którym całka po dowolnymkonturze zamkniętym z wektora natężenia tego pola wynosi zero
Wektor gradientu jest zawsze prostopadły do powierzchni ekwipotencjalnej
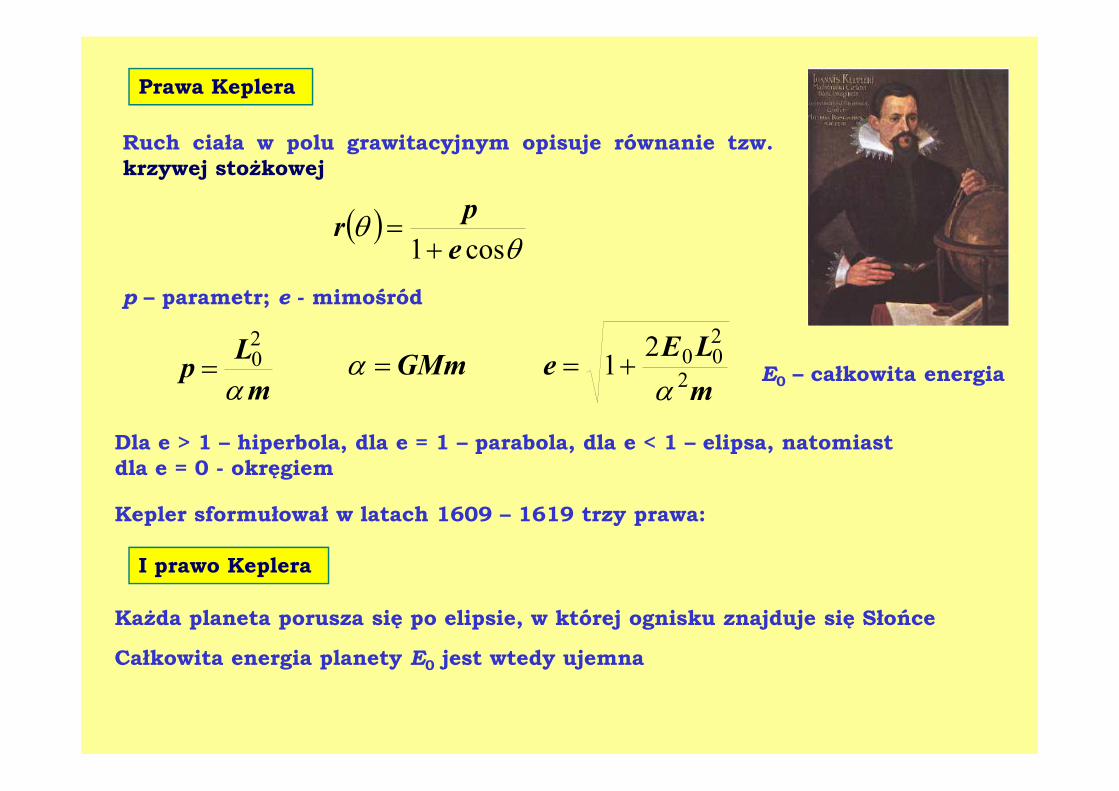
Prawa Keplera
Ruch ciała w polu grawitacyjnym opisuje równanie tzw.krzywej stożkowej
( )θ
θcos1 e
pr
+=
p – parametr; e - mimośród
m
Lpα
20= GMm=α
m
LEe
2
2002
1α
+= E0 – całkowita energiamα mα
Dla e > 1 – hiperbola, dla e = 1 – parabola, dla e < 1 – elipsa, natomiastdla e = 0 - okręgiem
Kepler sformułował w latach 1609 – 1619 trzy prawa:
I prawo Keplera
Każda planeta porusza się po elipsie, w której ognisku znajduje się Słońce
Całkowita energia planety E0 jest wtedy ujemna
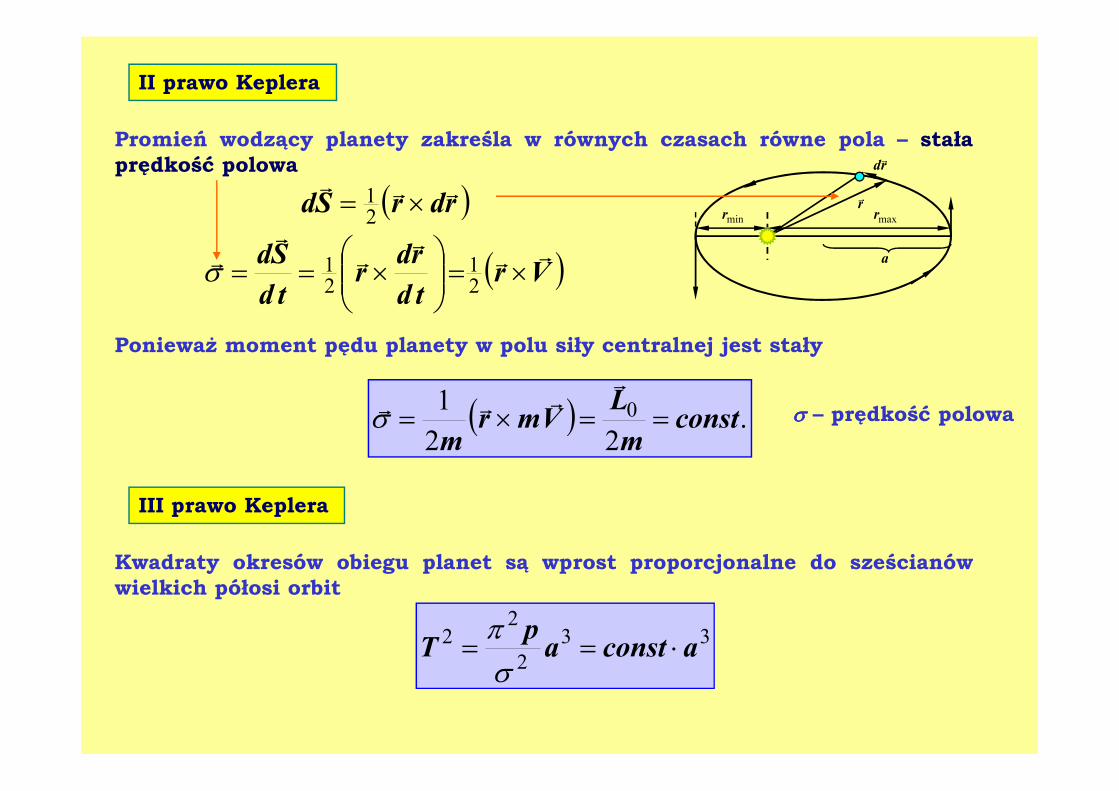
II prawo Keplera
Promień wodzący planety zakreśla w równych czasach równe pola – stałaprędkość polowa
( )rdrSdrrr
×=21
( )Vrtd
rdr
td
Sd rrr
rr
r ×=
×==
21
21σ
Ponieważ moment pędu planety w polu siły centralnej jest stały
( )1 Lr
rrr
rr
rdr
a
minr maxr
( ) .22
1 0 constm
LVmr
m==×=
rrrσ
III prawo Keplera
Kwadraty okresów obiegu planet są wprost proporcjonalne do sześcianówwielkich półosi orbit
33
2
22
aconstap
T ⋅==σπ
σσσσ – prędkość polowa
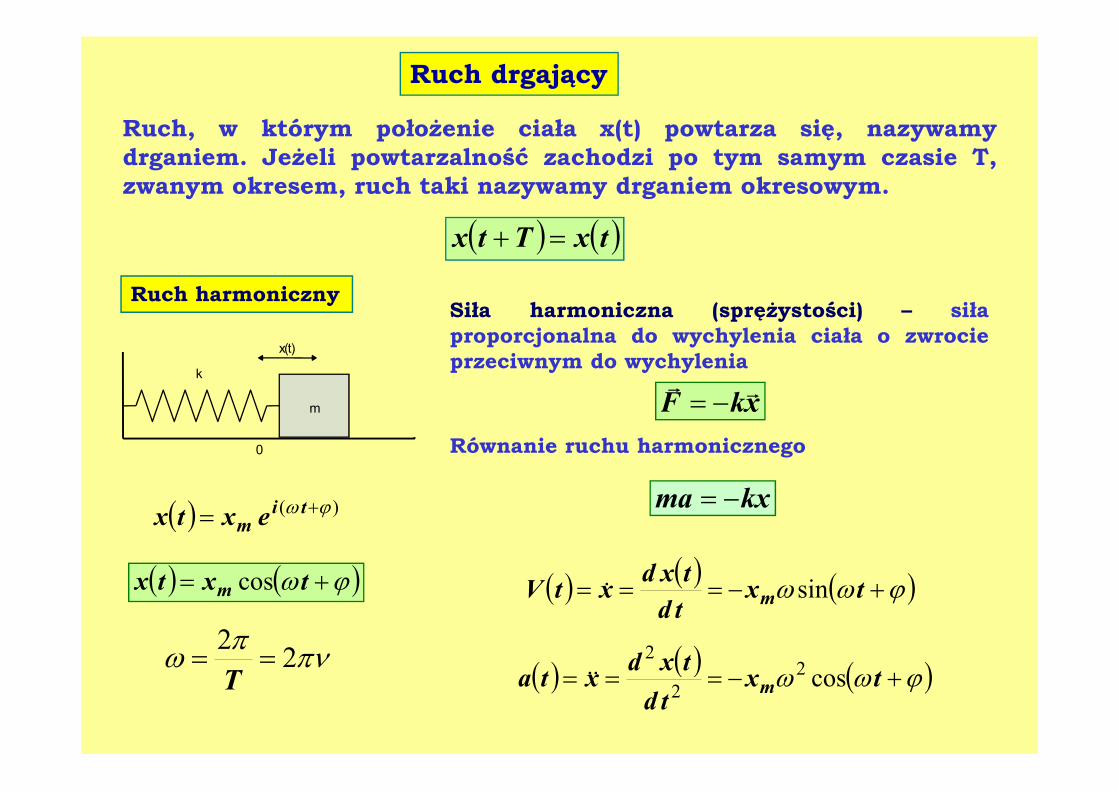
Ruch drgający
Ruch, w którym położenie ciała x(t) powtarza się, nazywamydrganiem. Jeżeli powtarzalność zachodzi po tym samym czasie T,zwanym okresem, ruch taki nazywamy drganiem okresowym.
( ) ( )txTtx =+
Ruch harmoniczny
k
x(t)
Siła harmoniczna (sprężystości) – siłaproporcjonalna do wychylenia ciała o zwrocieprzeciwnym do wychylenia
xkFrr
−=m
0
xkFrr
−=
( ) ( )ϕω += txtx m cos
πνπ
ω 22==
T
( ) ( ) ( )ϕωω +−=== txtd
txdxtV m sin&
( ) ( ) ( )ϕωω +−=== txtd
txdxta m cos2
2
2
&&
Równanie ruchu harmonicznego
kxma −=( ) )( ϕω += tim extx
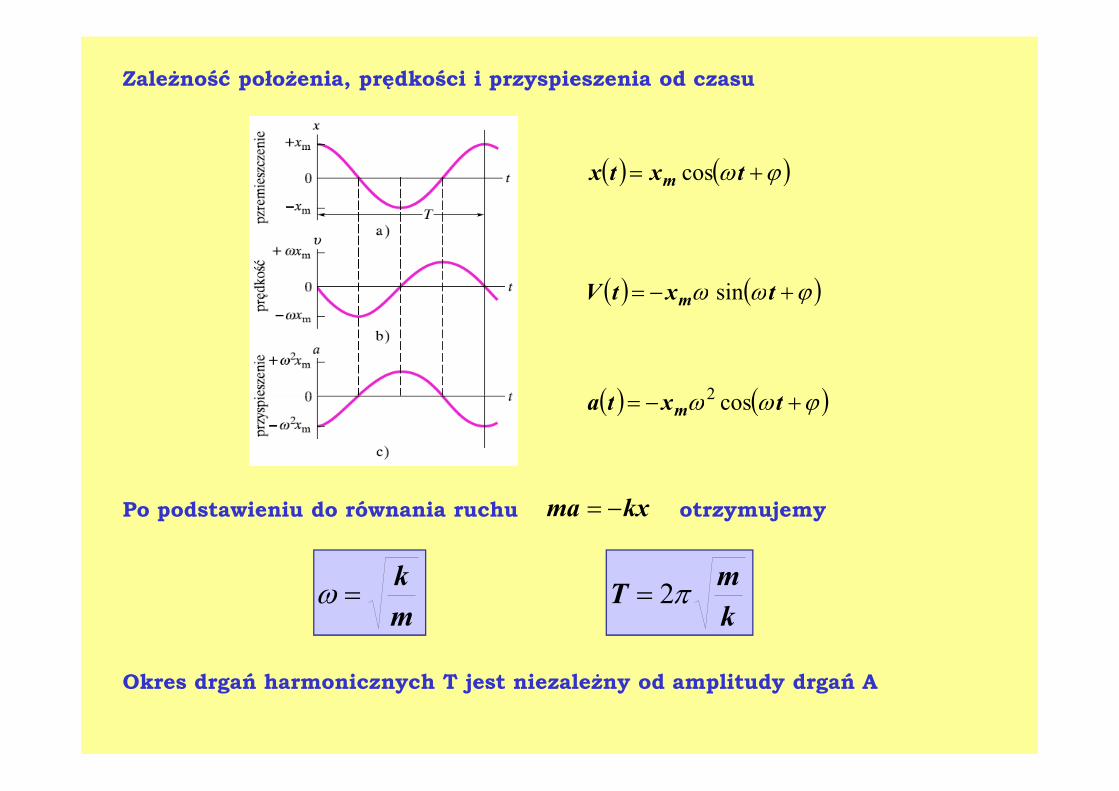
( ) ( )ϕω += txtx m cos
( ) ( )ϕωω +−= txtV m sin
( ) ( )ϕωω +−= txta cos2
Zależność położenia, prędkości i przyspieszenia od czasu
Po podstawieniu do równania ruchu otrzymujemy
m
k=ω
k
mT π2=
( ) ( )ϕωω +−= txta m cos2
kxma −=
Okres drgań harmonicznych T jest niezależny od amplitudy drgań A
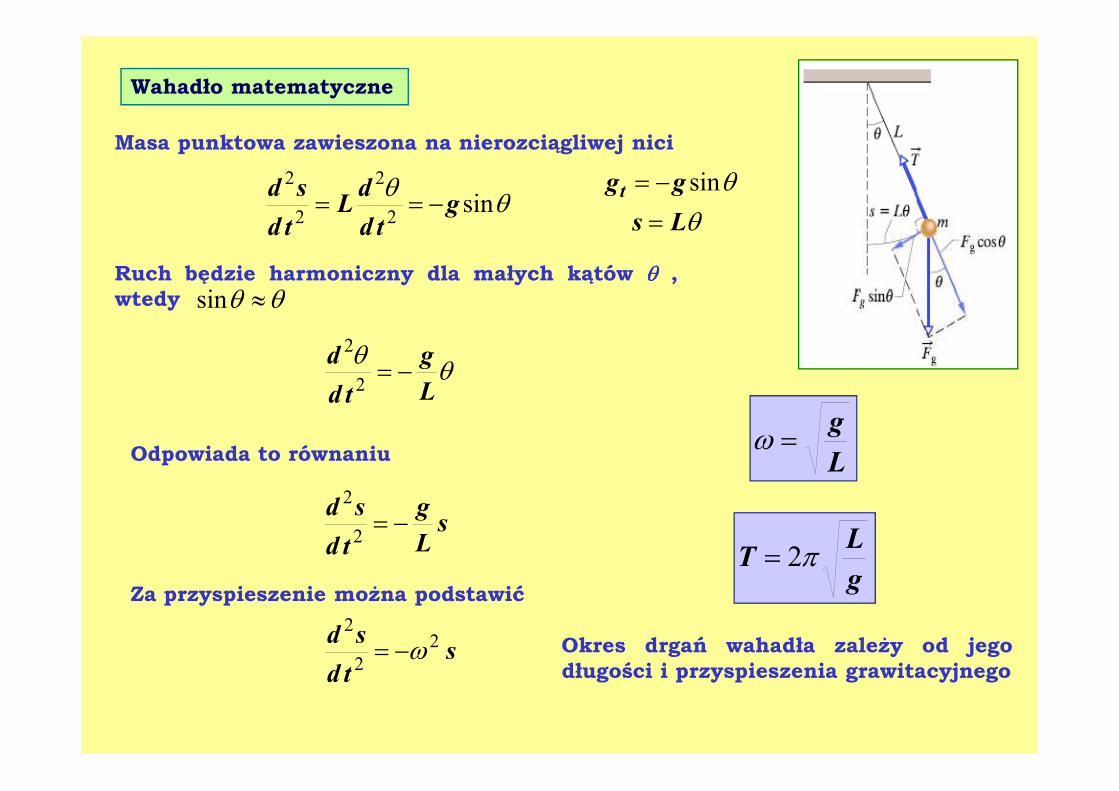
Wahadło matematyczne
Masa punktowa zawieszona na nierozciągliwej nici
θθ
sin2
2
2
2
gtd
dL
td
sd−==
θLs =
θsinggt −=
Ruch będzie harmoniczny dla małych kątów θθθθ ,wtedy θθ ≈sin
θθ
L
g
td
d−=
2
2
Ltd
sL
g
td
sd−=
2
2
Odpowiada to równaniu
std
sd 2
2
2
ω−=
g
LT π2=
Za przyspieszenie można podstawić
L
g=ω
Okres drgań wahadła zależy od jegodługości i przyspieszenia grawitacyjnego
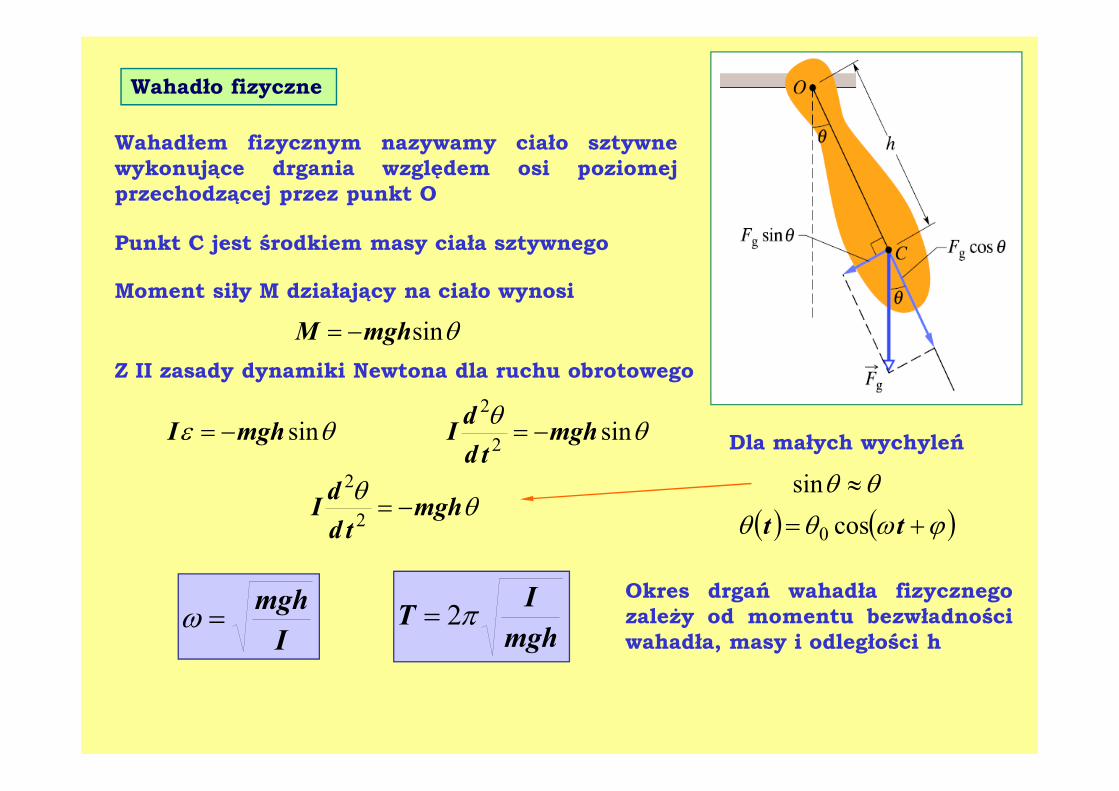
Wahadło fizyczne
Wahadłem fizycznym nazywamy ciało sztywnewykonujące drgania względem osi poziomejprzechodzącej przez punkt O
Punkt C jest środkiem masy ciała sztywnego
Moment siły M działający na ciało wynosi
θsinmghM −=
Z II zasady dynamiki Newtona dla ruchu obrotowego
2
θε sinmghI −= θθ
sin2
2
mghtd
dI −= Dla małych wychyleń
θθ ≈sinθ
θmgh
td
dI −=
2
2
( ) ( )ϕωθθ += tt cos0
I
mgh=ω
mgh
IT π2=
Okres drgań wahadła fizycznegozależy od momentu bezwładnościwahadła, masy i odległości h
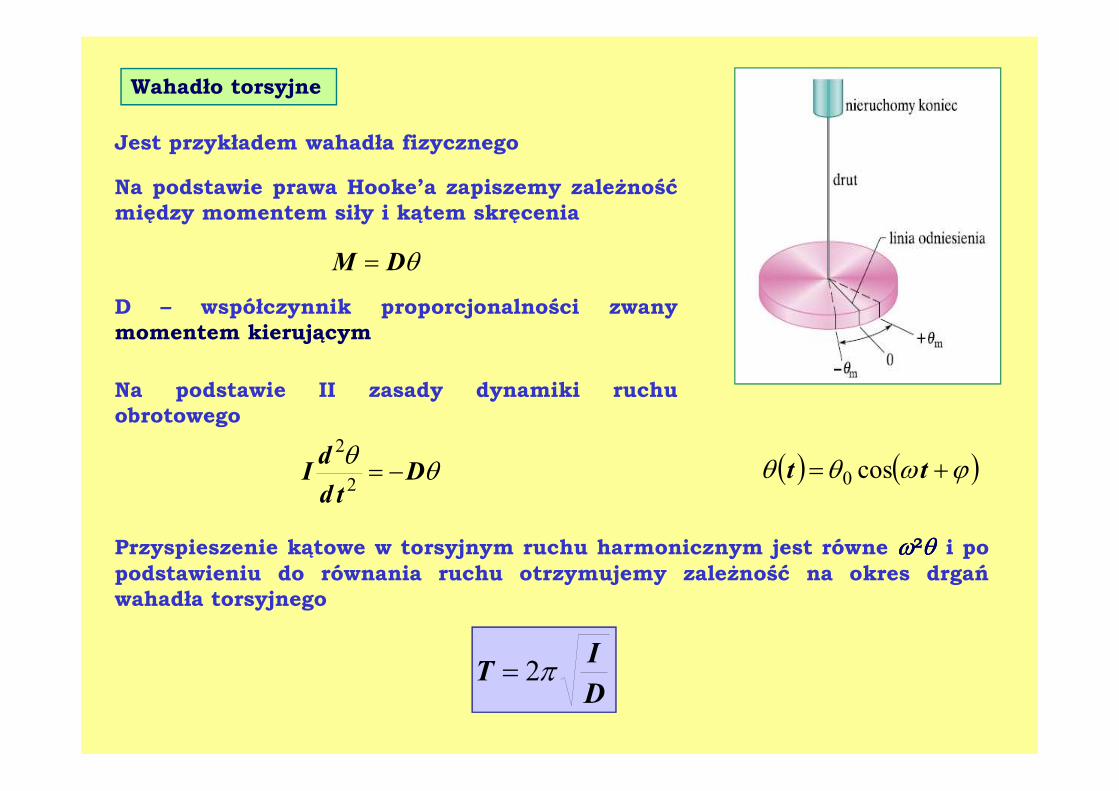
Wahadło torsyjne
Jest przykładem wahadła fizycznego
Na podstawie prawa Hooke’a zapiszemy zależnośćmiędzy momentem siły i kątem skręcenia
θDM =
D – współczynnik proporcjonalności zwanymomentem kierującym
Na podstawie II zasady dynamiki ruchu
D
IT π2=
θθ
Dtd
dI −=
2
2
Na podstawie II zasady dynamiki ruchuobrotowego
Przyspieszenie kątowe w torsyjnym ruchu harmonicznym jest równe ωωωω2θθθθ i popodstawieniu do równania ruchu otrzymujemy zależność na okres drgańwahadła torsyjnego
( ) ( )ϕωθθ += tt cos0
Drgania dwu ciał
x1
m2 m1
k
0
x2
F -F
µ
k
0
-F
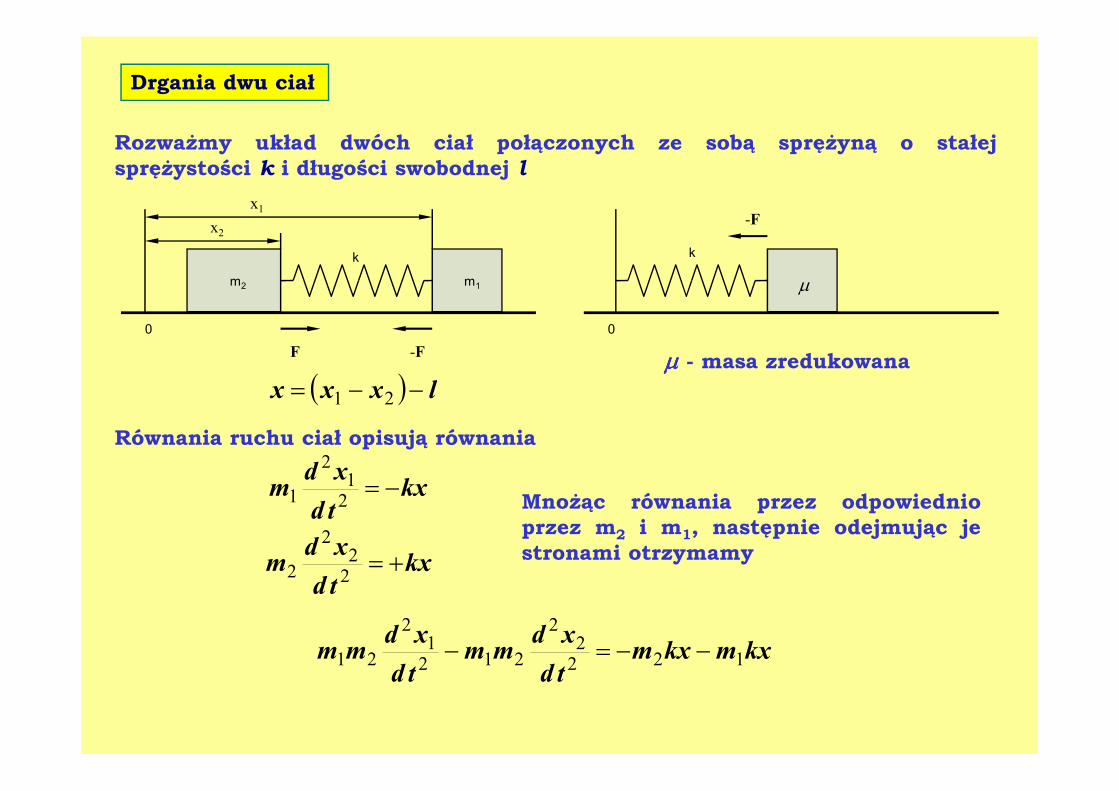
Rozważmy układ dwóch ciał połączonych ze sobą sprężyną o stałejsprężystości k i długości swobodnej l
( ) lxxx −−= 21
µµµµ - masa zredukowana( ) lxxx −−= 21
Równania ruchu ciał opisują równania
kxtd
xdm −=
21
2
1
kxtd
xdm +=
22
2
2
Mnożąc równania przez odpowiednioprzez m2 i m1, następnie odejmując jestronami otrzymamy
kxmkxmtd
xdmm
td
xdmm 122
22
2121
2
21 −−=−
Co można zapisać następująco
( ) kxxxtd
d
mm
mm−=−
+ 212
2
21
21
gdzie
21
21
mm
mm
+=µ µµµµ - masa zredukowana
Ponieważ l jest stałe, możemy zauważyć
( )2
2
212
2
td
xdxx
td
d=−
2212 tdtd
Równanie ruchu ciał przyjmuje postać
02
2
=+ xk
td
xd
µ
+=
21
111
mmµ
µω
k=
kT
µπ2=
Rozwiązując powyższe równanie otrzymujemy
Drgania tłumione
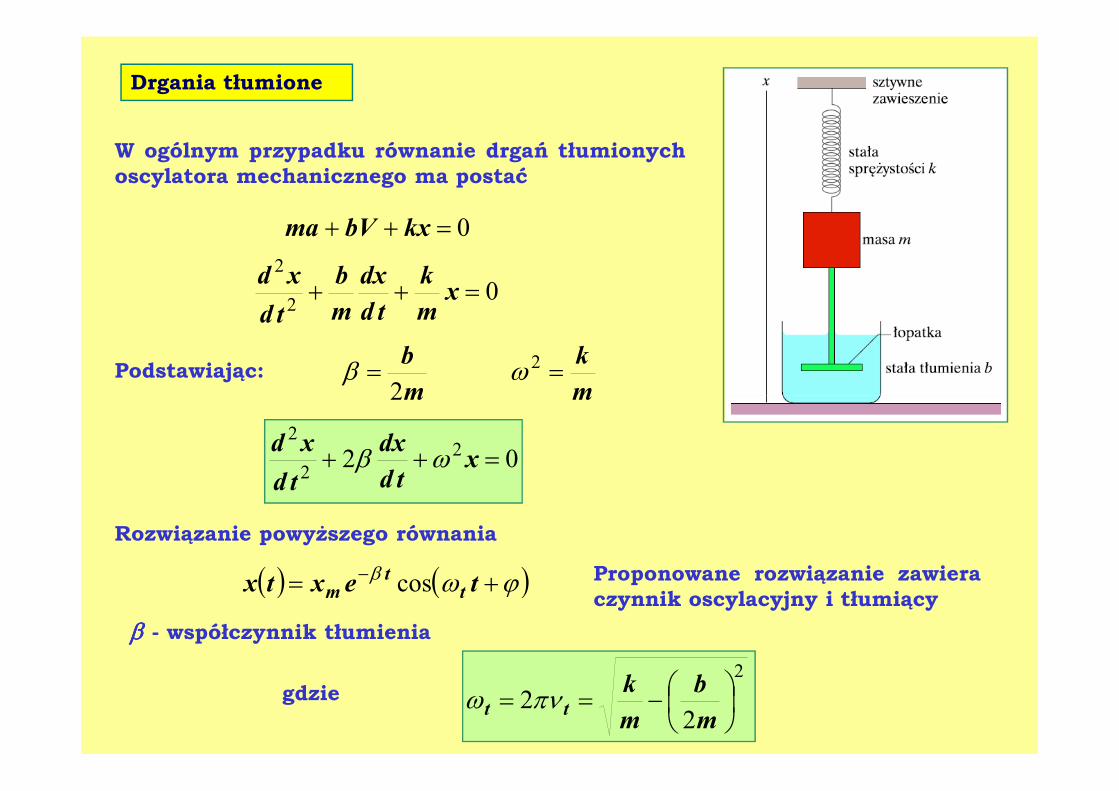
W ogólnym przypadku równanie drgań tłumionychoscylatora mechanicznego ma postać
0=++ kxbVma
02
2
=++ xm
k
td
dx
m
b
td
xd
Podstawiając:m
b
2=β
m
k=2ω
02 2
2
2
=++ xtd
dx
td
xdωβ
m2 m
( ) ( )ϕωβ += −textx t
tm cos
Rozwiązanie powyższego równania
Proponowane rozwiązanie zawieraczynnik oscylacyjny i tłumiący
ββββ - współczynnik tłumienia
gdzie2
22
−==m
b
m
ktt πνω
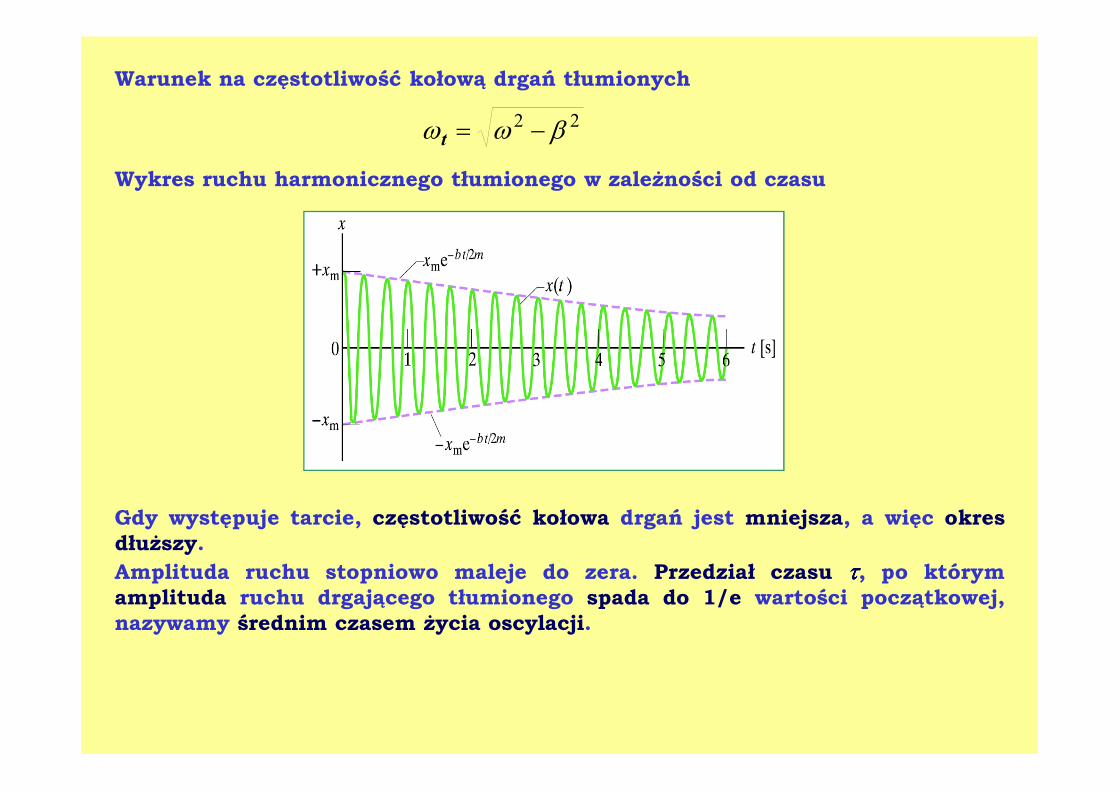
Warunek na częstotliwość kołową drgań tłumionych
22 βωω −=t
Wykres ruchu harmonicznego tłumionego w zależności od czasu
Gdy występuje tarcie, częstotliwość kołowa drgań jest mniejsza, a więc okresdłuższy.Amplituda ruchu stopniowo maleje do zera. Przedział czasu ττττ, po którymamplituda ruchu drgającego tłumionego spada do 1/e wartości początkowej,nazywamy średnim czasem życia oscylacji.
Drgania wymuszone i rezonans
Dotychczas mówiliśmy o drganiach:
m
k=ω
2
22
−==m
b
m
ktt πνω
Gdy na ciało działa zewnętrzna siła okresowa powstają drgania wymuszone
Równanie ruchu dla oscylatora wymuszonego można zapisać w postaci
swobodnych tłumionych
Równanie ruchu dla oscylatora wymuszonego można zapisać w postaci
tFkxtd
dxb
td
xdm wymm ωcos
2
2
=++
Rozwiązanie powyższego równania
( ) ( )ϕω −= tG
Ftx wym
m sin
gdzie
( ) 222222wymwym bmG ωωω +−=
G
barc
wymωϕ cos=
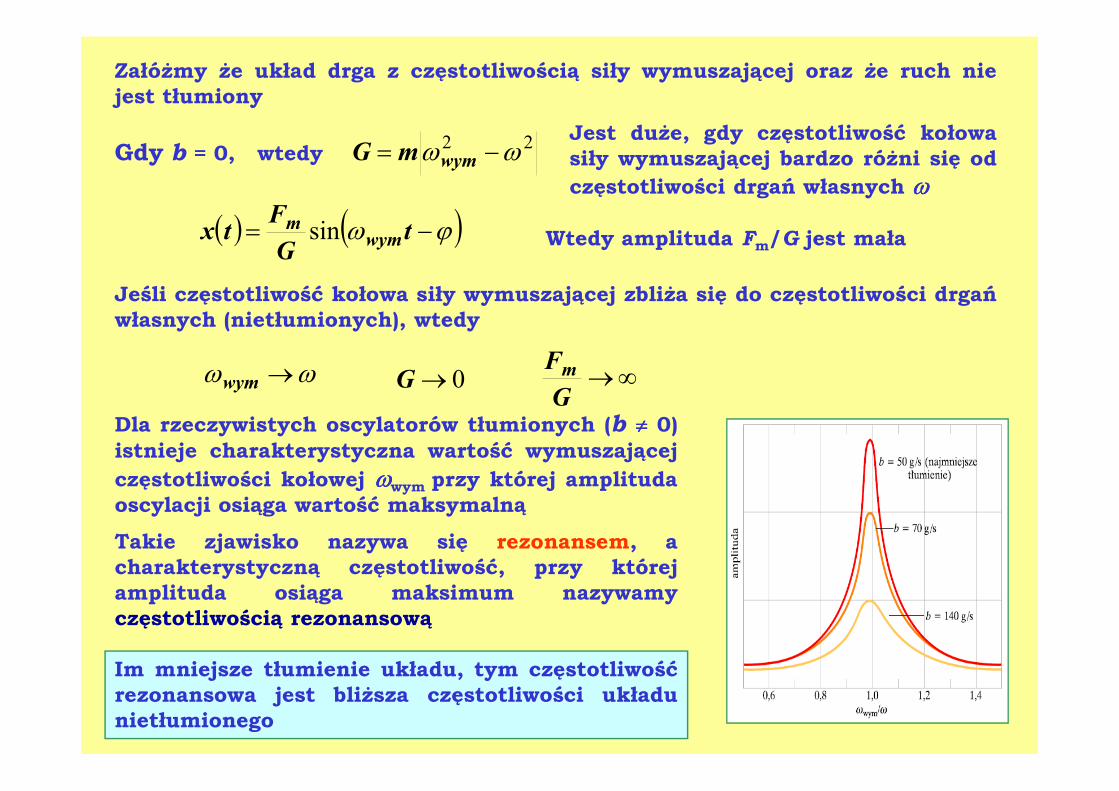
Załóżmy że układ drga z częstotliwością siły wymuszającej oraz że ruch niejest tłumiony
Gdy b = 0, wtedy 22 ωω −= wymmGJest duże, gdy częstotliwość kołowasiły wymuszającej bardzo różni się odczęstotliwości drgań własnych ωωωω
( ) ( )ϕω −= tG
Ftx wym
m sin Wtedy amplituda Fm/G jest mała
Jeśli częstotliwość kołowa siły wymuszającej zbliża się do częstotliwości drgańwłasnych (nietłumionych), wtedy
ωω →wym 0→G ∞→G
Fm
GDla rzeczywistych oscylatorów tłumionych (b ≠≠≠≠ 0)istnieje charakterystyczna wartość wymuszającejczęstotliwości kołowej ωωωωwym przy której amplitudaoscylacji osiąga wartość maksymalną
Takie zjawisko nazywa się rezonansem, acharakterystyczną częstotliwość, przy którejamplituda osiąga maksimum nazywamyczęstotliwością rezonansową
Im mniejsze tłumienie układu, tym częstotliwośćrezonansowa jest bliższa częstotliwości układunietłumionego