Innowacje w polskiej nauce w obszarze matematyki i...
150
Innowacje w polskiej nauce w obszarze matematyki i informatyki. Przegląd aktualnej tematyki badawczej Pod redakcją naukową Łukasz Koźmiński Jacek Doskocz Piotr Kardasz Wydawnictwo Nauka i Biznes 2016
Transcript of Innowacje w polskiej nauce w obszarze matematyki i...

Innowacje w polskiej nauce w obszarze matematyki i informatyki.
Przegląd aktualnej tematyki badawczej
Pod redakcją naukową
Łukasz Koźmiński
Jacek Doskocz
Piotr Kardasz
Wydawnictwo Nauka i Biznes
2016

Redakcja naukowa:
dr inż. Łukasz Kuźmiński Uniwersytet Ekonomiczny we Wrocławiu
Ul. Komandorska 118/120, 53-345 Wrocław
Katedra Rachunkowości, Controllingu, Informatyki i
Metod Ilościowych
Dr inż. Jacek Doskocz Fundacja Rozwoju Nauki i Biznesu w obszarze Nauk
Medycznych i Ścisłych
Legnicka 65, 54-206 Wrocław
Klaster Badań Rozwoju i Innowacji, Klub
Innowacyjni Naukowcy
Dr inż. Piotr Kardasz Wyższa Szkoła Informatyki Stosowanej we
Wrocławiu, Wydział Automatyki i
Robotyki, Wejcherowska 28, 54-239 Wrocław
Fundacja Rozwoju Nauki i Biznesu w obszarze Nauk
Medycznych i Ścisłych
Legnicka 65, 54-206 Wrocław
Klaster Badań Rozwoju i Innowacji
Recenzenci naukowi i branżowi mgr inż. Benedykt Bryłka dr inż. Jacek Doskocz dr inż. Marek Doskocz dr inż. Tomasz Janiczek dr inż. Piotr Kardasz dr inż. Jacek Kujawski dr inż. Monika Michalska mgr inż. Anna Okniańska mgr Katarzyna Puchała
dr inż. Anna Stanclik (Kozik) mgr inż. Olga Stępień mgr Sławomir Stępień dr Anna Mempel-Śnieżyk dr inż. Łukasz Szałata inż. Magdalena Tomaszewska inż. Piotr Wroński prof. zw. dr hab. inż. Jerzy Zwoździak prof. dr hab. inż. Dariusz Zmarzły
Projekt okładki: mgr inż. Olga Stępień Elementy grafiki na okładce pochodzą ze strony freepik.com. Korekta: mgr inż. Anna Kaczmarek-Gałęza inż. Magdalena Gazdowicz inż. Piotr Wroński Wydanie pod patronatem merytorycznym: Fundacji Rozwoju Nauki i Biznesu w obszarze Nauk Medycznych i Ścisłych
Klastra Badań i Rozwoju oraz Innowacji
Klubu Innowacyjni Naukowcy ISBN: 978-83-947095-2-5
Niniejsza publikacja zawiera zbiór tematycznych prac prezentowanych przez uczestników, podczas konferencji w roku 2016 we
Wrocławiu: Ogólnopolska Konferencja Innowacyjni Naukowcy pod patronatem Ministerstwa Nauki i Szkolnictwa Wyższego, Ogólnopolska Konferencja Innowacyjnych Projektów Badawczych oraz Start Innowacji. Zawarte w niniejszej publikacji artykuły zostały
zamieszczone na odpowiedzialność ich autorów, którzy przesłali ich treści Organizatorom konferencji oraz zatwierdzili poprawki
recenzentów i korektorów.
email: [email protected]
www.wnib.pl
WYDAWNICTWO NAUKA I BIZNES Sp. z o. o., z siedzibą w Brzeziny ul. Chęcińska 169, Poczta: Morawica, Kod pocztowy:26-026, zarejestrowana w Krajowym Rejestrze Sądowym pod numerem KRS: 0000654271, kapitał zakładowy 50 00,00zł w całości wniesiony, NIP: 6572927439, REGON: 366131514, strona internetowa: www.wnib.pl , Firma powstała jako start up Dolnośląskiego Akceleratora Technologii i Innowacji.

Spis Treści:
Przedmowa .............................................................................................................................................. 4
Rozdział I: Symulacje komputerowe parametrów mikroskopowych i makroskopowych materiałów
przy pomocy Metody Elementów Dyskretnych
- Piotr Klejment, Alicja Kosmala, Natalia Foltyn, Wojciech Dębski ......................................................... 5
Rozdział II: Optymalizacja matematyczna procesu epoksydacji alkoholu allilowego 30-proc.
nadtlenkiem wodoru na katalizatorze Ti-SBA-15 oraz w acetonitrylu jako rozpuszczalniku - zmiany
selektywności przemiany alkoholu allilowego do glicydolu
- Edyta Makuch, Agnieszka Wróblewska ............................................................................................... 20
Rozdział III: Model matematyczny w strategii kształtowania odpowiedniej ceny i promocji na bazie
rabatów i upustów
- Jacek Wawrzostek, Szymon Ignaciuk .................................................................................................. 30
Rozdział IV: Propozycja procesu pozyskiwania danych rynkowych na potrzeby realizacji badań
poświęconych zastosowaniu informatyki w gospodarce
- Artur Machura ..................................................................................................................................... 42
Rozdział V: Platforma ActGo-Gate jako innowacyjny model integracji usług
- Wiesława Gryncewicz, Maja Leszczyńska ........................................................................................... 56
Rozdział VI: Interfejsy użytkownika stosowane w urządzeniach dźwigowych – stan aktualny i kierunki
rozwoju
- Karol Miądlicki ..................................................................................................................................... 66
Rozdział VII: Interfejsy wizyjne i rozszerzona rzeczywistość w sterowaniu żurawiami przeładunkowymi
- Karol Miądlicki, Mirosław Pajor........................................................................................................... 82
Rozdział VIII: Koncepcja zastosowania symulatora opartego o technologię wirtualnej rzeczywistości
do szkolenia maszynistów w zakresie efektywnego energetycznie prowadzenia pociągu
- Witold Bartnik, Małgorzata Ćwil ......................................................................................................... 95
Rozdział IX: Standard LTE jako perspektywa rozwoju technologii GSM-R
- Grzegorz Olczyk ................................................................................................................................. 104
Rozdział X: Metody komunikowania stanów afektywnych w urządzeniach mobilnych
- Jakub Trojanowski, Michał Folwarczny, Piotr Hrebieniuk, Remigiusz Szczepanowski ...................... 117
Rozdział XI: Programowanie równoległe w języku Java z wykorzystaniem biblioteki PCJ
- Marek Nowicki, Piotr Bała ..................................................................................................................129
Rozdział XII: Modelowanie wycieków w sieci wodociągowej
- Tomasz Boczar, Norbert Adamkiewicz ...............................................................................................140

4
Przedmowa
Matematyka jest królową nauk, to hasło jeszcze nigdy nie było tak prawdziwe jak dziś,
gdy rozważania matematyczne są podstawą funkcjonowania systemów na całym świecie.
Rozwój technologii, w szczególności przystępność mocy obliczeniowej w urządzeniach
mobilnych oraz globalna sieć dostępu do zasobów daje możliwości kreowania nowej
rzeczywistości. W połączeniu z matematyką wpływa realnie na otaczający świat poprzez
modelowanie molekularne (np. znajdowanie związków chemicznych o pożądanych
właściwościach bez konieczności ich syntezy), planowanie i optymalizacja produkcji,
rozszerzanie możliwości sterowniczych urządzeniami, wprowadzanie usług rynkowych i tak
dalej.
W związku z szybką wdrażalnością innowacji informatyczno-matematycznych, dużą
stopą zwrotu i łatwością skalowalności, obszar ten jest mocno wspierany zarówno przez
instytucje finansujące naukę i rozwój jak i przez prywatne firmy oraz fundusze inwestycyjne.
Powoduje to iż do naszego życia prywatnego oraz zawodowego jest wkracza coraz więcej
wkracza informatyki, matematyki, robotyki. Widać to również po używanym słownictwie:
wirtualna rzeczywistość, modelowanie, internet rzeczy, big data, data minig oraz chmura.
W niniejszej monografii zebrano przykłady polskich prac naukowych nastawionych na
innowacje. Zbiór ten powstał po interdyscyplinarnych konferencjach: Innowacyjni Naukowcy,
Innowacyjne Projekty Badawcze, Start Innowacji, które odbyły się w roku 2016. Konferencje
objęły patronem liczne instytucje w tym Ministerstwo Nauki i Szkolnictwa Wyższego.
Mimo, że innowacje często eliminują pracowników nie da się ich zatrzymać. Można
i należy znaleźć szansę rozwoju i korzyści, bo technologie informatyczne nie znają granic.
Zachęcamy do zapoznania się z wartościowymi pracami naukowymi podkreślając
i gratulując zarazem otwartości autorów na współpracę i rozwój.
Życzymy owocnej lektury,
Zespół Redaktorów Naukowych

5
Rozdział I:
Symulacje komputerowe
parametrów mikroskopowych i makroskopowych materiałów
przy pomocy Metody Elementów Dyskretnych
Piotr Klejment1, Alicja Kosmala1, Natalia Foltyn1, Wojciech Dębski1
(1) Instytut Geofizyki Polskiej Akademii Nauk
Piotr Klejment, [email protected]
STRESZCZENIE
Jednym z najważniejszych zadań stojących obecnie przed nauką jest opracowywanie
nowych materiałów i tworzenie technologii do szczegółowej analizy materiałów już
istniejących. Kompozyty, polimery, szkła metaliczne, czy nanomateriały – to zaledwie kilka
przykładów substancji, które mogą zrewolucjonizować przemysł i świat. Niestety,
powszechnie używane w inżynierii materiałowej metody laboratoryjne mają swoje
ograniczenia - są kosztowne, czasochłonne i nie dają pełnego wglądu w strukturę próbki.
W rozwiązaniu tego problemu mogą nam pomóc komputery. W ostatnich dekadach
nastąpił niezwykle szybki rozwój mocy obliczeniowej. Dlatego symulacje komputerowe
zaczynają stanowić poważną alternatywę dla wszelkiego rodzaju doświadczeń
laboratoryjnych. Jedną z takich komputerowych metod analizy materiałów jest metoda
elementów dyskretnych, używana do rozwiązywania naukowych i inżynierskich problemów.
W symulacji metodą elementów dyskretnych materiał jest przedstawiany jako zbiór
wielkiej liczby cząstek mogących wchodzić ze sobą w interakcje. Takie symulacje
dostarczają alternatywny sposób pomiaru makroskopowych właściwości syntetycznej próbki
materiału, jak również wgląd w jej parametry mikroskopowe.
Symulacje komputerowe otwierają możliwość współpracy z przemysłem
zainteresowanym wdrażaniem technologii opartych na nowoczesnych materiałach. Dzięki
eksperymentom komputerowym możliwa jest wstępna ocena parametrów potencjalnie
obiecujących materiałów. Otrzymane parametry pozwalają na określenie, czy dany materiał
ma interesujące właściwości i czy nadaje się do analiz laboratoryjnych połączonych
z dalszymi inwestycjami i ewentualnym wdrożeniem do produkcji.
Słowa kluczowe: Metoda Elementów Dyskretnych, ESyS-Particle, Mechanika Materiałów,
Inżynieria Materiałowa, Symulacje Komputerowe

6
1. WSTĘP
Celem niniejszego artykułu jest zaprezentowanie możliwości, jakie dają symulacje
komputerowe we współczesnej nauce o materiałach. Teoretyczne metody analizy struktury
materiałów – jak dynamika molekularna – istnieją już od kilkudziesięciu lat. Jednak dopiero
w obecnych czasach możliwe jest użycie tych metod w sposób efektywny w praktyce, dzięki
możliwościom, jakie dają coraz szybsze komputery. Jest to niezwykle istotne, gdyż
właściwości materiałów są powiązane z ich wewnętrzną strukturą i budową atomową. Stąd
potrzeba efektywnych metod, które taką strukturę pozwalają odkryć.
Jedną z metod teoretycznej analizy materiałów jest Metoda Elementów Dyskretnych
w skrócie określana jako DEM [1]. Jej głównym celem jest obliczanie właściwości fizycznych
obiektów składających się z dużej liczby oddziałujących ze sobą cząstek. Symulacja taka
wykonywana na komputerze rozpoczyna się od nadania cząstkom położeń i prędkości
początkowych – tak, aby jak najwierniej odtworzyć badany obiekt. Następnie zadany czas
trwania symulacji podzielony zostaje na dużą ilość przedziałów czasowych. W każdym
z takich przedziałów analizowane jest położenie i prędkość każdego elementu
symulowanego obiektu, a także działające na niego siły oraz interakcje z sąsiednimi
elementami. Już w tym momencie widać, że największa zaleta metody elementów
dyskretnych jest także jej największą wadą – w przypadku symulowania rzeczywistych
materiałów składających się z milionów cząstek potrzebna jest naprawdę duża moc
obliczeniowa.
Obecnie istnieją już programy z zaimplementowaną Metodą Elementów Dyskretnych,
ale większość z nich ciągle znajduje się w fazie testów. Jednym z nich, dostarczanym na
zasadzie open – source, jest ESyS – Particle rozwijany w Centre for Geoscience Computing
należącym do Uniwersytetu w Queensland (Australia) [2]. Dzięki zaimplementowanemu
interfejsowi MPI (ang. Message Passing Interface) możliwe jest uruchamianie symulacji
ESyS-Particle na komputerach stacjonarnych, klastrach komputerowych
i superkomputerach. Interfejs ten zarządza wykonywaniem długotrwałych obliczeń i dzieli je
pomiędzy procesory tak, aby każdy z nich zajmował się inną częścią tego samego zadania w
tym samym czasie. ESyS-Particle posiada także interfejs programistyczny aplikacji API (ang.
Application Programming Interface). Umożliwia on użytkownikowi tworzenie własnego
oprogramowania na bazie bibliotek i funkcji zawartych w silniku programu ESyS. Skrypty w
języku Python obsługują wszystkie niezbędne w symulacji parametry, funkcje i oddziaływania
bez konieczności ingerowania w sam silnik oprogramowania. Dodatkowe narzędzia do
wizualizacji umożliwiają wykonywanie animacji przedstawiających zachowanie się próbki w
czasie symulacji.
Przedstawione w niniejszej pracy metody i rezultaty są przede wszystkim powiązane
z geofizyką - albowiem znajomość fizyki stojącej za procesami pękania materiałów jest
kluczowym zagadnieniem w sejsmologii, a zwłaszcza w sejsmologii górniczej, przemyśle
wydobywczym, czy też badaniu zjawisk powiązanych z trzęsieniami ziemi. W każdej z tych
dziedzin znajomość mechaniki pękania jest kluczowa do prowadzenia badań w tych
obszarach. Używane dotychczas metody mają swoje ograniczenia. Symulacje komputerowe
oferują alternatywny sposób zdobycia informacji o interesujących nas materiałach i zbadania
ich parametrów.

7
W pracy tej przedstawiono przykład analizy komputerowo wygenerowanej próbki
materiału składającego się z cząstek o różnej wielkości, połączonych wiązaniami. W czasie
eksperymentu komputerowego próbka była ściskana, aż do wystąpienia pęknięcia. W ten
sposób możliwe było wyliczenie wielu interesujących parametrów mikroskopowych
i makroskopowych. Na przykład, dzięki znajomości siły przyłożonej do próbki, wykonana
została analiza naprężeń występujących w materiale, wyliczenie modułu Young’a oraz
wytrzymałości próbki na ściskanie jednoosiowe.
2. TREŚĆ WŁAŚCIWA
2.1 METODYKA STOSOWANIA SYMULACJI KOMPUTEROWYCH DO MODELOWANIA
MATERIAŁÓW
Symulacje komputerowe materiałów wymagają zastosowania jednej z dwóch
istniejących metod – jedna z nich zakłada ciągłość ośrodka, druga jego dyskretną strukturę.
Przykładem pierwszego podejścia jest oparta na mechanice continuum metoda elementów
skończonych FEM. W metodzie tej materiał stanowi odkształcalny, ciągły ośrodek sprężysto
– plastyczny. Przy takim podejściu względne przemieszczenia i obroty cząstek nie są brane
pod uwagę, w związku z czym konieczne jest stosowanie odpowiednich zależności w celu
odzwierciedlenia skomplikowanego stanu przemieszczenia wewnątrz materiału. Metoda ta
ma swoje ograniczenia, ponieważ nie uwzględnia dyskretnej natury ośrodków ziarnistych, co
czyni ją nieprzydatną w wielu dziedzinach związanych z geofizyką. Przykładami takich
zjawisk, w których metoda elementów skończonych się nie sprawdza, są: modelowanie
fragmentacji, separacji, czy mieszania materiałów, jak również symulacje pękania lub
kruszenia skał. Metodę elementów skończonych stosuje się na ogół do zagadnień
statycznych lub quasi – statycznych w zakresie małych odkształceń. W przypadku
występowania dużych odkształceń lub dla zjawisk powiązanych z przepływem substancji,
symulacja może stać się niestabilna, a w efekcie dać błędne wyniki [3].
Alternatywą jest metoda elementów dyskretnych DEM, traktująca ośrodek jako zbiór
cząstek, które mogą ze sobą oddziaływać. W najprostszym przypadku, cząstki – elementy
mogą być dyskami (dla symulacji dwuwymiarowych) lub sferami (w przypadku symulacji
trójwymiarowych) [3]. W symulacjach DEM elementy mogą się przemieszczać, obracać
i wchodzić ze sobą w interakcje. Możliwość modelowania przemieszczeń i obrotów
wszystkich niezależnych elementów składających się na symulowany obiekt stwarza
możliwość zastosowania tej metody do wszelakich zjawisk, w których występują przepływy,
duże odkształcenia lub fragmentacja obiektów.
2.2.1 PODSTAWOWE ZAŁOŻENIA METODY ELEMENTÓW DYSKRETNYCH
Algorytm metody elementów dyskretnych można podzielić na dwie główne części:
pierwszą, związaną z tworzeniem modelu kontaktów i obliczeniem sił działających na
elementy oraz drugą, w której względem każdego elementu używana jest II zasada dynamiki
Newtona w celu obliczenia zmian położeń i prędkości elementów w wyniku działania
niezrównoważonych sił. Równania ruchu rozwiązywane są oddzielnie dla każdego elementu,
w każdym kroku czasowym. Algorytm rozwiązywania jest oparty na jawnym schemacie
całkowania równań ruchu [4]. Dla zachowania stabilności numerycznej symulacji niezbędne
jest stosowanie małych kroków czasowych – aby elementy nie przemieściły się nadmiernie
w jednostkowym przedziale czasowym. To znaczy, że dobrana wartość kroku czasowego
powinna być wystarczająca mała, aby ruch elementu był na tyle mały, żeby miał wpływ
jedynie na bezpośrednie otoczenie elementu.

8
Ten stosunkowo prosty model ma niezwykle szerokie zastosowania. Użycie metody
elementów dyskretnych pozwala na opis zjawisk dynamicznych, jak i statycznych
związanych z materiałem. Możliwe jest modelowanie przepływów, separacji, fragmentacji,
mieszania, segregacji, ściskania, rozciągania, pękania i wielu innych zjawisk.
Metoda elementów dyskretnych opiera się na kilku bazowych założeniach, które są
wspólne dla każdej symulacji. Materiał traktowany jest jako zbiór sztywnych obiektów – tak
zwanych elementów dyskretnych. Sztywność w tym przypadku oznacza, że elementy nie
podlegają odkształceniom. Jednocześnie nie wyklucza to nachodzenia na siebie elementów.
Gdy dwa obiekty zaczynają na siebie nachodzić w czasie symulacji, traktowane jest to jako
rozpoczęcie oddziaływania między nimi [5,6]. Wielkość tego oddziaływania zależy od sił
kontaktowych. Materiał składa się z pojedynczych elementów, które razem tworzą
symulowany obiekt. Dlatego makroskopowe zachowanie materiału wynika z ruchu
i oddziaływania indywidualnych elementów. Tym samym makroskopowa odpowiedź
materiału w trakcie symulacji zależy od mikroparametrów elementów i modeli kontaktów
między nimi. Możemy wyróżnić kilka rodzajów mikroparametrów, takich jak mikroparametry
geometryczne i fizyczne: kształt, rozmiar lub gęstość i mikroparametry konstytutywne:
sztywność kontaktowa lub tłumienie. Symulacja metodą elementów dyskretnych jest
procesem dynamicznym, a stan równowagi występuje tylko wtedy, gdy wszystkie siły
kontaktowe (wewnętrzne) się równoważą. Każdy dyskretny element się przemieszcza
i obraca, a kontakty pomiędzy elementami są wykrywane w każdym kroku symulacji.
Elementy traktuje się jako idealnie sztywne [7], z założeniem, że dozwolone jest
nachodzenie elementów na siebie, co traktuje się jako odkształcenie w punkcie kontaktu.
Jednak takie nachodzenie na siebie elementów traktuje się jako małe w porównaniu do ich
rozmiarów. Należy dodać, że siły kontaktowe pomiędzy takimi dwoma obiektami
wchodzącymi ze sobą w interakcję związane są poprzez relację siła – przemieszczenie.
W punktach, w których dochodzi do kontaktu, mogą zostać utworzone wiązania i połączenia
między elementami. W punkcie kontaktu istnieje także możliwość przenoszenia sił
ściskających i rozciągających (o ile obecne są wiązania), jak również sił stycznych
prostopadłych do sił na kierunku normalnym do płaszczyzny kontaktu.
2.2.2 SCHEMAT ALGORYTMU METODY ELEMENTÓW DYSKRETNYCH
Cykl kalkulacji w metodzie elementów dyskretnych jest krokowy i bazuje on na
zastosowaniu II zasady dynamiki Newton’a dla każdego elementu oraz relacji siła –
przemieszczenie dla każdego kontaktu między obiektami. W cyklu obliczeniowym występują
dwa zależne od siebie algorytmy dla dwóch typów równań. Pierwszy ze wspomnianych
typów to równania ruchu, które służą do obliczenia przemieszczeń elementów symulacji
wynikających z oddziaływania na nie niezrównoważonych sił. Drugi typ to równania
konstytutywne [8], których zadaniem jest obliczenie sił działających na elementy będące
w kontakcie, w oparciu o wybrany model. Jednocześnie założenie jest takie, że wszystkie
dane ze wcześniejszego kroku symulacji są uznawane za stałe i znane w kolejnym kroku
symulacji.

9
Rys.1. Schemat algorytmu zaimplementowanego w metodzie elementów dyskretnych
W tym momencie należy dokładniej przyjrzeć się prawom opisującym i regulującym
ruch poszczególnych elementów. Pierwsza z takich zasad mówi, że ruch poszczególnych
obiektów składających się na symulowany materiał wynika z działania wypadkowych
wektorów siły i momentu siły. Ruch takiego elementu jest złożeniem ruchu postępowego
środka ciężkości sztywnego ciała (w tym przypadku dyskretnego elementu) oraz ruchu
obrotowego względem układu odniesienia zdefiniowanego w środku ciężkości elementu.
Ruch postępowy środka ciężkości jest opisany przez jego pozycję ix , prędkość ix
i przyspieszenie ix
. Z kolei ruch obrotowy określony jest przez prędkość kątową i
i przyspieszenie kątowe i
.
Na bazie tych wielkości możliwe jest zapisanie równania ruchu postępowego [4]:
iii gxmF (1)
gdzie:
iF [N] to siła wypadkowa,
m [kg] to masa elementu,
ig [m/s2] to przyspieszenie od siły masowej (np. siła ciężkości).
Obiekty w symulacji metodą elementów dyskretnych mogą wykonywać nie tylko ruch
postępowy, ale także wykonywać obroty. Dlatego niezbędne jest także zdefiniowanie
wektorowego równania ruchu obrotowego [4]:
dt
dIHM i
ii
(2)

10
gdzie:
iM [Nm] to wypadkowy moment siły działający na element,
iH [m2kg/s] to moment pędu elementu.
Równania ruchu postępowego i obrotowego są integrowane przy pomocy jawnego algorytmu
centralnych różnic skończonych, przy założeniu kroku t . Wielkości ix
oraz i
są
obliczane w przedziałach pośrednich (w połowie przedziału czasowego) 2
tnt
, natomiast
wielkości takie jak ix , ix
, iF , iM są obliczane w pełnych przedziałach (przedziałach
głównych) tnt .
Poniższe wyrażenia opisują przyspieszenia w ruchu postępowym i obrotowym w czasie t w
zależności od wartości prędkości w połowie przedziałów [4]:
2/2/
1tt
i
tt
i
t
i xxt
x (3)
2/2/1
tt
i
tt
i
t
i
t (4)
Uwzględniając te wyrażenia we wzorach opisujących ruch postępowy (1) i ruch obrotowy (2)
i rozwiązując dla chwili 2
tt
otrzymujemy [4]:
tgm
Fxx i
t
i
tt
i
tt
i
2/2/
(5)
tgI
Mi
t
i
tt
i
tt
i
2/2/
(6)
Ostatecznie, uzyskane prędkości służą do zaktualizowania pozycji elementu:
txxxtt
it
i
tt
i
2/
(7)
W skrócie algorytm obliczeniowy służący do aktualizacji położeń elementów może zostać
podsumowany w trzech punktach:

11
na początku kroku czasowego znana jest prędkość w ruchu postępowym
2/tt
ix
,
prędkość kątowa elementu
2/tt
i
, jego położenie t
ix , wypadkowa działających
na niego sił t
iF oraz wypadkowy moment siły t
iM
dysponując danymi z poprzedniego punktu możliwe jest wyliczenie, na podstawie
równań (5) i (6), nowej wartości prędkości
2/tt
ix
i prędkości kątowej
2/tt
i
ostatecznie, równanie (7) służy do obliczenia pozycji elementów dyskretnych tt
ix
.
2.2.3 MODELE KONTAKTU
Jak zostało wspomniane powyżej, elementy dyskretne w symulacji metodą
elementów dyskretnych mogą wchodzić ze sobą w interakcje – objawia się to poprzez
nachodzenie cząstek na siebie. W algorytmie mogą zostać zaimplementowane różne typy
kontaktów, ale bazowe założenia pozostają takie same. Mianowicie, siła kontaktowa może
zostać rozłożona na dwie składowe: składową normalną, działającą w kierunku normalnym
do płaszczyzny kontaktu oraz składową styczną, działającą w płaszczyźnie [9,10]. Termin
kontakt ogólnie wyraża wzajemną interakcję – odpowiada fizycznemu zetknięciu.
Wyróżniamy trzy komponenty opisujące specyfikę kontaktu: sztywność kontaktu zapewnia
elastyczną relację pomiędzy siłą kontaktową a względnym przemieszczeniem elementów),
warunki poślizgu i oddzielenia oraz występujące wiązania.
Rys.2. Schematyczne przedstawienie modelu kontaktu pomiędzy cząstkami
Możliwe jest stosowanie różnych modeli kontaktów, w zależności od potrzeb danej
symulacji, jednak możemy wyszczególnić dwa najpowszechniej stosowane modele: model
liniowy oraz model Hertz’a – Mindlin’a [9]. W modelu liniowym siła i względne
przemieszczenie powiązane są liniowo, za pomocą stałej sztywności kontaktowej. Natomiast
w modelu Hertz’a – Mindlin’a siła i względne przemieszczenie są ze sobą powiązane
w sposób nieliniowy, przy pomocy zmiennej sztywności kontaktowej. Wspomniana
sztywność kontaktowa jest funkcją właściwości geometrycznych i materiałowych dwóch
elementów będących w kontakcie, jak również aktualnej wartości siły normalnej. Dwa
kluczowe parametry opisują wiązanie w takim modelu: jest to współczynnik sprężystości
poprzecznej (moduł Kirchoff’a, odpowiedzialny za naprężenie) i bezwymiarowy współczynnik
Poisson’a opisujący dwa elementy będące w kontakcie.
Innym istotnym zagadnieniem jest generowanie upakowania elementów. Wyróżniamy
dwa podstawowe sposoby pakowania elementów: poprzez algorytmy dynamiczne
i geometryczne. W algorytmie dynamicznym próbka jest tworzona np. przez swobodny

12
spadek kolejnych warstw elementów. Zaletą jest uzyskanie z góry określonego rozkładu
wielkości elementów. W przypadku modelu geometrycznego, elementy są umieszczane
w oparciu o zależności geometryczne, często z wykorzystaniem wstępnie przygotowanych
siatek.
2.2.4 PODSUMOWANIE METODY ELEMENTÓW DYSKRETNYCH
Ze względu na swoje właściwości, elastyczność i ogromne możliwości, metoda
elementów dyskretnych znajduje zastosowania w niemal wszystkich dziedzinach nauki, jak
i aplikacjach przemysłowych. Przykładem takiego zastosowania jest badanie mechaniki
materiałów (zarówno sypkich, jak i skał) – symulacje pozwalają na wykonywanie wirtualnych
eksperymentów zastępujących lub odtwarzających testy laboratoryjne. Dzięki temu istnieje
możliwość przeanalizowania wpływu czynników zewnętrznych na badany materiał oraz jego
odpowiedzi w skali mikro i makro. Metoda elementów dyskretnych staje się także
podstawowym narzędziem geotechniki, jest też stosowana do modelowania wielkoskalowych
procesów przemysłowych (górnictwo, rolnictwo, budownictwo, przemysł farmaceutyczny).
Podsumowując, metoda elementów dyskretnych to potężne i uniwersalne narzędzie,
które dzięki licznym zaletom znajduje coraz to nowe zastosowania w przemyśle i nauce.
Największą z zalet tej metody jest możliwość zrozumienia mechanizmów i procesów
występujących w materiale, między innymi poznanie interakcji na poziomie mikroskopowym,
które determinują odpowiedź w skali makroskopowej. W rezultacie możliwe jest
modelowanie materiału na poziomie indywidualnych elementów [11,12]. Dzięki takiemu
podejściu uzyskiwane są informacje o rozkładzie prędkości elementów, dystrybucji energii,
naprężeń, czy też siłach oddziaływania. Wielkości te są trudne do oszacowania w oparciu
o mechanikę ośrodków ciągłych, a praktycznie niemożliwe do bezpośredniego zmierzenia
podczas badań laboratoryjnych. W rezultacie, dzięki łatwemu modelowaniu problemów
z występującymi deformacjami, zniszczeniami, czy procesami o dyskretnej naturze, pojawia
się możliwość rozszerzenia istniejącej wiedzy o mechanice materiałów.
Metoda elementów dyskretnych ma także wady. A w zasadzie wadę jedną, ale
bardzo ograniczającą praktyczne zastosowania – wymaga ogromnych zasobów mocy
obliczeniowej. Dlatego metoda ta dopiero teraz, wraz z rozwojem komputerów, zyskuje na
popularności. Blisko 40 lat temu, gdy została opracowana, stanowiła tylko i wyłącznie
teoretyczne narzędzie, które mogło stanowić podstawę dla symulacji niewielkich
i uproszczonych problemów naukowych. Nawet obecnie modelowanie wielkoskalowych
problemów wciąż jest niezwykle czasochłonne i wymaga licznych uproszczeń [13]. Wynika to
z faktu, że metoda elementów dyskretnych wymaga bardzo małych kroków czasowych,
w algorytmie w sposób jawny rozwiązywane są równania ruchu, a do tego w czasie symulacji
przetwarzana i gromadzona jest ogromna ilość danych o wszystkich elementach.
2.2.5 PROBLEM KALIBRACJI MODELU
Modelowanie materiału jest jednym z najistotniejszych etapów tworzenia symulacji,
którego celem jest przygotowanie numerycznego modelu odzwierciedlającego zachowanie
rzeczywistego materiału z jak największą zgodnością.
Ciała stałe składają się z elektrycznie naładowanych lub neutralnych cząstek,
wzajemnie oddziałujących siłami elektromagnetycznymi. Siły te wiążą ze sobą jony, atomy
lub cząsteczki tworzące ciała stałe. Fizyczne właściwości kryształów bądź ciał amorficznych
silnie zależą od natury tych wiązań, wśród których wymieniamy wiązania: jonowe,

13
metaliczne, van der Waalsa, kowalencyjne i wodorowe. Między sąsiadującymi ze sobą
w ciele stałym atomami (jonami, cząsteczkami) występuje na ogół kilka rodzajów wiązań
jednocześnie, jednak zazwyczaj jedno z wymienionych wiązań zdecydowanie dominuje.
Rodzaje wiązań w ciałach stałych różnią się między sobą nie tylko samą istotą, ale także, co
jest naturalne, siłą i energią. Najsilniejsze są wiązania kowalencyjne, słabsze są wiązania
jonowe i metaliczne, a najsłabsze wiązania wodorowe i van der Waals’a. Konkretne wartości
tych energii zależą od składu chemicznego i struktury ciała stałego [14]. Przykładem może
być grafit, którego warstwy związane są ze sobą siłami van der Waals’a, a w samych
warstwach występuje wiązanie kowalencyjne oraz lód, w którym cząsteczki wody związane
są ze sobą wiązaniem wodorowym, zaś w obrębie tych cząsteczek panują wiązania
kowalencyjno – jonowe. Ponieważ rzeczywiste materiały mają tak skomplikowaną strukturę,
ich symulowanie stanowi skomplikowane zagadnienie.
Symulowany materiał powstaje na bazie odpowiedniego doboru elementów i wiązań
pomiędzy nimi, a zatem makroskopowe zachowanie układu zależy od mikroskopowych
właściwości elementów, które go tworzą. Jednym z najważniejszych problemów dotyczących
budowy modelu symulacyjnego w metodzie elementów dyskretnych jest właściwy wybór
mikroparametrów opisujących elementy i wiązania między nimi. Brakuje ścisłej relacji między
parametrami opisującymi interakcje między obiektami symulacji, a parametrami opisującymi
próbkę jako całość [15]. Dobór odpowiednich wartości mikroparametrów w celu uzyskania
makroskopowej odpowiedzi układu, zgodnej z rzeczywistym materiałem, jest bardzo trudny.
Modelowanie bezpośrednie [4], gdy z góry znamy parametry i możemy je zaaplikować do
układu, jest rzadką sytuacją. Jedynym rozwiązaniem tego zagadnienia jest podejście
iteracyjne. Jest to przykład modelowania odwrotnego, gdy dobór mikroparametrów następuje
na bazie parametrów makroskopowych. Powszechnie stosowanym podejściem jest
wykonywanie laboratoryjnych badań próbki materiału w celu określenia makroskopowej
charakterystyki, a następnie numeryczne odzwierciedlenie wybranych testów i iteracyjna
zmiana wybranych mikroparametrów aż do osiągnięcia oczekiwanej odpowiedzi.
2.3 ESyS-Particle
Istnieje wiele dostępnych programów do symulacji komputerowych na bazie metody
elementów dyskretnych. Jednym z nich jest ESyS-Particle, używany na potrzeby niniejszego
artykułu. Oprogramowanie to zostało zaprojektowane jako narzędzie do badania fizyki skał
oraz dynamiki trzęsień ziemi. W ESyS-Particle została także zaimplementowana możliwość
rotacji pojedynczych cząsteczek oraz pełen zestaw interakcji pomiędzy nimi. ESyS-Particle
napisany jest w języku C++ i przeznaczony do obliczeń zarówno na komputerach osobistych,
jak również na klastrach komputerowych oraz superkomputerach, dzięki
zaimplementowanemu systemowi Message Passing Interface. Zarządzanie
oprogramowaniem odbywa się za pomocą skryptów pisanych w języku Pyton [2].
2.4 PRZYKŁAD SYMULACJI METODĄ ELEMENTÓW DYSKRETNYCH - ŚCISKANIE
JEDNOOSIOWE
W niniejszej pracy przedstawiony został przykład symulacji metodą elementów
dyskretnych próbki materiału wykonanej za pomocą oprogramowania ESyS-Particle i analizy
mikro oraz makroparametrów tejże próbki. Symulowany materiał miał formę
prostopadłościanu o rozmiarach 10 mm x 20 mm x 10mm i składał się z cząstek o losowo
wybranych rozmiarach w przedziale 0.4 mm – 2.0 mm. Na tak wygenerowanej próbce został

14
wykonany komputerowy eksperyment ściskania jednoosiowego – popularnej metody
laboratoryjnej badania materiałów.
Rys.3. Prostopadłościenna próbka podczas eksperymentu ściskania jednoosiowego
Na Rys.3. zaprezentowana została wizualizacja próbki podczas komputerowego
eksperymentu ściskania jednoosiowego. Obrazek po lewej prezentuje próbkę na początku
trwania symulacji, a obrazek po prawej – na końcu. Symulacja trwała 0,25 sekundy, ilość
kroków czasowych wynosiła 250000, z krokiem czasowym 10-6 sekundy. Do górnej i dolnej
powierzchni próbki przyłożona została zmienna siła, która przesuwała obydwie powierzchnie
ze stałą prędkością 0,2 cm/s. Efektem działania tych sił było zerwanie wiązań pomiędzy
elektami symulowanego materiału i jego pęknięcie. Schematyczne przedstawienie wiązań,
którymi połączone były cząstki podczas symulacji, znajduje się na Rys.4.
Rys.4. Schematyczne przedstawienie wiązania międzycząsteczkowego
Zaletą metody elementów dyskretnych jest dostęp do wielu informacji o próbce,
zarówno w kontekście jej właściwości makroskopowych, jak i tych dotyczących
poszczególnych cząstek. Poniżej zaprezentowano wykresy przedstawiające zmiany
wybranych wielkości fizycznych podczas symulacji.
Na Rys.5. zostały pokazane zmiany w energii kinetycznej cząstek podczas symulacji.
W każdym kroku czasowym energia kinetyczna wszystkich elementów była sumowana. Na
wykresie dobrze widoczny jest moment, gdy rozpoczęło się pękanie wiązań w próbce
i cząstki uzyskiwały swobodę ruchu – odpowiada on mniej więcej 0,13 sekundy
eksperymentu. Należy zauważyć, że podany czas to zasymulowany czas trwania
rzeczywistego ściskania materiału, nie ma on nic wspólnego z czasem, jaki wymagało

15
wykonanie tej symulacji na komputerze. W tym przypadku symulacja 0,25 sekundy ściskania
materiału trwała na komputerze osobistym około 20 minut. Rys.6. przedstawia zsumowaną
energię kinetyczną rotacji wszystkich cząstek, wynikającą z możliwości obracania się
elementów. Co interesujące, gwałtowny przyrost energii kinetycznej rotacji nastąpił
wcześniej, niż w przypadku energii kinetycznej ruchu postępowego.
Rys.5. Sumaryczna energia kinetyczna wszystkich cząstek składających się na symulowaną
próbkę w każdym kroku czasowym
Rys.6. Sumaryczna energia kinetyczna rotacji wszystkich cząstek składających się na
symulowaną próbkę w każdym kroku czasowym
Rys. 7. dostarcza informacji o sumarycznej energii zgromadzonej w wiązaniach
pomiędzy elementami. Z przebiegu symulacji wynika, że proces pękania próbki rozpoczął się
mniej więcej po 0,13 sekundy. Tymczasem Rys.7. sugeruje, że proces pęknięcia
poprzedzony został gwałtownym przyrostem energii zgromadzonej w wiązaniach, przy czym
energia ta równie szybko zaczęła opadać po rozpoczęciu pękania. Oznacza to, że

16
zgromadzona w wiązaniach energia została zużyta na zerwanie tych wiązań, co zainicjowało
proces pękania materiału. Zależność z Rys.8., prezentująca sumaryczną ilość wiązań
międzyelementowych w materiale, jak i Rys.9. z przedstawioną prędkością cząstek,
potwierdza informacje z poprzednich wykresów.
Rys.7. Sumaryczna energia potencjalna wszystkich wiązań pomiędzy cząstkami
składającymi się na symulowaną próbkę w każdym kroku czasowym
Rys.8. Ilość wiązań istniejących pomiędzy cząstkami składających się na symulowaną
próbkę w każdym kroku czasowym

17
Rys.9. Sumaryczna prędkość wszystkich cząstek składających się na symulowaną próbkę
w każdym kroku czasowym
Jedną z najważniejszych zależności jest relacja pomiędzy odkształceniem i
naprężeniem próbki – Rys.10. Pozwala ona na wyznaczenie dwóch istotnych parametrów
makroskopowych charakteryzujących materiał – wartości modułu Young’a oraz odporności
na ściskanie. Moduł Young’a wylicza się z nachylenia krzywej i w tym wypadku wynosi on
nieco ponad 170 MPa. Natomiast wytrzymałość na ściskanie jest tożsama z pikiem krzywej
i dla tych danych ma ona wartość około 325 MPa.
Rys.10. Zależność pomiędzy odkształceniem i naprężeniem w próbce

18
3. WNIOSKI
Zastosowania Metody Elementów Dyskretnych już obecnie są bardzo szerokie. Ze względu
na fakt, że oprogramowania używające tej metody są cały czas w fazie testów, liczba
potencjalnych zastosowań może być o wiele większa, niż się przewiduje. Przykłady dziedzin,
w których metoda elementów dyskretnych już została wdrożona, to: farmaceutyka (symulacje
mieszania leków), rolnictwo (symulacje produktów spożywczych, zwłaszcza tych
składających się z dużej liczby małych obiektów, jak zboże), geofizyka (procesy
szczelinowania hydraulicznego wykonywane podczas poszukiwania gazu ziemnego
z łupków), chemia (symulacje przechowywania materiałów chemicznych), budownictwo czy
ogólnie przemysł (symulacje transportu materiałów sypkich) [15].
Rys.11. Symulacja propagującej się szczeliny podczas pękania materiału
W symulacjach związanych z geofizyką szczególnie interesujące są badaniach
dotyczące materiałów i ich wytrzymałości, ze szczególnym uwzględnieniem mechaniki
pękania (przykład symulacji z Rys.11.). Symulacje takie mogą mieć dwojaki charakter:
naukowy – z zastosowaniem np. do fizyki trzęsień ziemi, gdzie obliczanie stopnia naprężenia
wewnątrz mas skalnych i przewidywanie momentu ich pęknięcia jest sprawą kluczową oraz
typowo inżynierski – z potencjalnym zastosowaniem do wielkoskalowych symulacji
zachowania materiałów poddanych ekstremalnym warunkom i wyliczania wytrzymałości
materiałów.
Wadą metody elementów dyskretnych są wymagania dotyczące mocy komputerów,
ale także problemy z kalibracją modeli. Wykonanie symulacji dowolnego zjawiska wymaga
iteracyjnego dopasowania parametrów mikro do parametrów makro. Zaawansowane typy
wiązań międzycząsteczkowych, mogą pozwolić lepiej odtwarzać rzeczywiste materiały, ale
wymagają wcześniejszego porównania wyników eksperymentów komputerowych
z laboratoryjnymi. Pozwala to na dobranie właściwych ustawień parametrów materiału, tak,
aby można było wykonywać symulacje rzeczywistych substancji. Innym wyzwaniem jest
dostosowanie symulacji do obliczeń na superkomputerach. Zaimplementowany w programie
ESyS-Particle interfejs MPI pozwala na takie podejście. Obecnie, bez wątpienia, tylko
superkomputery pozwalają na wykonywanie symulacji materiałów o realnych rozmiarach.
W dalszej perspektywie otwiera to możliwość nawiązania wielopłaszczyznowej współpracy
z przemysłem inwestującym w rozwiązania materiałowe. Dzięki symulacjom metody
elementów dyskretnych można przeprowadzać wstępne testy planowanego do wdrożenia
materiału i oceniać, czy nadaje się on do dalszych analiz i implementacji, czy też nie.

19
LITERATURA
[1] Cundall, P. A., and O. D. L. Strack (1979), A discrete numerical model for granular
assemblies, Geotechnique, 29(1), 47–65, doi:10.1680/geot.1979.29.1.47
[2] Abe S., Boros V., Hancock W., Weatherley D., ESyS – Particle Tutorial and User’s
Guide Version 2.3.1, 2014
[3] Onate E., Rojek J., Combination of discrete element and Finie element methods for
dynamic analysis of geomechanics problems (2004). Computer methods in applied
mechanics andengineering, 193, 3087-3128
[4] Metodyka modelowania z wykorzystaniem Metody Elementów Dyskretnych,
www.wydawnictwoagh.pl/pliki/344410894.pdf, data dostępu: 14.11.2016 r.
[5] [5] O’Sullivan C., Particulate Discrete Element Modeling: A Geomechanics Perspective
[online], S.1.: Spon Press/Taylor & Francis, 2011
[6] Abe, S., H. van Gent, and J. L. Urai (2011), DEM simulation of normal faults in
cohesive materials, Tectonophysics, doi:10.1016/j.tecto.2011.09.008
[7] Cook, J., J. E. Gordon, C. C. Evans, and D. M. Marsh (1964), A mechanism for the
control of crack propagation in all-brittle systems, Proc. R. Soc. London Ser. A. Math.
Phys. Sci., 282(1391),508–520, doi:10.1098/rspa.1964.0248
[8] Egholm, D. L. (2007), A new strategy for discrete element numerical models: 1. Theory,
J. Geophys. Res., 112, B05203, doi:10.1029/2006JB004557
[9] Fakhimi, A., and E. Alavi Gharahbagh (2011), Discrete element analysis of the effect of
pore size and pore distribution on the mechanical behavior of rock, Int. J. Rock Mech.
Min. Sci., 48(1),77–85, doi:10.1016/j.ijrmms.2010.08.007
[10] Jaeger, J., N. G. Cook, and R. Zimmerman (2007), Fundamentals of Rock Mechanics,
pp. 488, Wiley-Blackwell, Malden, MA.
[11] Li Y. G., Imaging, Modeling and Assimilation in Seismology, De Gruyter, Berlin 2012
[12] Potyondy, D., and P. Cundall (2004), A bonded-particle model for rock, Int. J. Rock
Mech. and Min. Sci., 41 (8), 1329–1364, doi:10.1016/j.ijrmms.2004.09.011
[13] Rapaport D.C., „The art of molecular dynamics simulation”, Cambridge University
Press, Cambridge 2004
[14] Garbarczyk J., Wstęp do fizyki ciała stałego, Oficyna Wydawnicza Politechniki
Warszawskiej, Warszawa 2000
[15] Christensen R. M., The Theory of Materiale Failure, Oxford University Press, Oxford
2013

20
Rozdział II:
Optymalizacja matematyczna procesu epoksydacji alkoholu allilowego 30-proc. nadtlenkiem wodoru na katalizatorze Ti-SBA-15 oraz w acetonitrylu jako rozpuszczalniku - zmiany selektywności
przemiany alkoholu allilowego do glicydolu
Edyta Makuch, Agnieszka Wróblewska
Zachodniopomorski Uniwersytet Technologiczny w Szczecinie, Wydział Technologii
i Inżynierii Chemicznej, Instytut Technologii Chemicznej Organicznej, ul. Pułaskiego 10,
70-322 Szczecin
Email: [email protected], [email protected]
STRESZCZENIE
Celem pracy było przeprowadzenie optymalizacji matematycznej procesu epoksydacji
alkoholu allilowego na katalizatorze Ti-SBA-15 oraz w acetonitrylu jako rozpuszczalniku.
I wyznaczenie optymalnych parametrów tego procesu, to znaczy takich, przy których
uzyskuje się maksymalną wartość głównej funkcji opisującej proces (selektywności
przemiany do glicydolu w odniesieniu do przereagowanego AA). Ponadto celem pracy było
przygotowanie rysunków warstwicowych dla badanej funkcji, a także przeprowadzenie ich
szczegółowej analizy. Dzięki optymalizacji uściślono wartości maksymalne tej głównej
funkcji. Proces epoksydacji optymalizowano matematyczną metodą planowania
doświadczeń, przy użyciu planu rotalno-uniformalnego. Plan doświadczeń zrealizowano
posługując się programem komputerowym Cadex:Esdet 2.2. Rysunki warstwicowe
wykonano używając programu komputerowego Surfer 7.0. Współczynniki równania regresji
dla normowanych wielkości wejściowych wyznaczono metodą najmniejszych kwadratów. Po
wyznaczeniu funkcji aproksymującej sprawdzano jej adekwatność testem
Fishera-Snedecora. Ponadto obliczono: wariancję powtarzalności doświadczeń,
współczynnik powtarzalności doświadczeń, wariancję adekwatności doświadczeń,
współczynnik adekwatności doświadczeń, współczynnik korelacji wielowymiarowej oraz
maksymalny błąd bezwzględny. Maksimum otrzymanego równania regresji wyznaczono
matematycznie, przy wykorzystaniu programu komputerowego Cadex. Maksymalną wartość
funkcji odpowiedzi oraz odpowiadającą jej rzeczywistą wartość zmiennych niezależnych
przedstawiono w tabeli. Przebiegi badanej funkcji wykreślono przy jednoczesnych zmianach
dwóch parametrów procesu, pozostałe parametry były stałe i przyjmowały wartości zgodne
z wyznaczonymi dla maksimum badanej funkcji.
ABSTRACT
The aim of this work was performing the mathematical optimization of epoxidation of
AA over the Ti-SBA-15 catalyst and in the presence of acetonitrile. Moreover, the optimum
parameters for this process were determined that would provide maximum values of main
function describing the process (selectivity of transformation to glycidol in relation to AA
consumed). Moreover, the study to be aimed at preparation and detailed analysis of contour
plots for the studied function. Mathematical optimization specified optimal values of the main
function. The process of the epoxidation of AA was optimized using the mathematical
method of experiments planning according to the rotatable-uniform design. The design of

21
experiments was made using software Cadex: Esdet 2.2. The contour plots were made using
software Surfer 7.0. Regression equation coefficients were calculated by the least-square
method. After the determination of the approximation function, its adequacy was verified by
means of the Fisher-Snedecor test. Moreover, also were calculated: variance of repeatability,
coefficient repeatability, variance of adequacy, coefficient adequacy, coefficient of multiple
correlation and maximum relative error. Maximum values of the response function and
corresponding value of independent variables were presented in tables. The course of the
studied function was plotted for simultaneous variations of two chosen process parameters,
while other parameters were constant and equal to the values corresponding to maximum of
the studied function.
Słowa kluczowe: matematyczna optymalizacja, plan rotalno-uniformalny, epoksydacja
alkoholu allilowego, nadtlenek wodoru, katalizator Ti-SBA-15, acetonitryl, glicydol
Keywords: mathematical optimization, rotatable-uniform design, epoxidation of allyl alcohol,
hydrogen peroxide, Ti-SBA-15 catalyst, acetonitrile, glycidol
1. WSTĘP
Z badań wpływu parametrów technologicznych na przebieg epoksydacji związków
allilowych ((alkoholu allilowego (AA), alkoholu metallilowego (AMA), alkoholu krotylowego
(AK) i 1-buten-3-olu (1B3O)) wynika, że korzystne wyniki uzyskuje się prowadząc proces
epoksydacji AA w acetonitrylu jako rozpuszczalniku. Proces ten umożliwia uzyskanie
produktu głównego (glicydolu) z wysoką selektywnością (80% mol). Najwyższą wartość tej
funkcji otrzymano w następujących - najkorzystniejszych warunkach: temperatura 30oC,
stosunek molowy alkoholu allilowego do nadtlenku wodoru 1,0, stężenie acetonitrylu
80% wag., ilość katalizatora Ti-SBA-15 3,0% wag. i czas reakcji 180 minut [1].
Produkt główny epoksydacji AA wykorzystywany jest w produkcji antybiotyków
antybakteryjnych oraz związków o działaniu przeciwwirusowym. Chiralny glicydol znajduje
zastosowania w syntezie antybiotyku antynowotworowego - pluramyciny. Ponadto
wykorzystuje się go również w interakcyjnych substancjach kancerogennych DNA, takich jak:
tlenek alfatoksyny B1. Te, należące do hybryd glicydolowo-węglowodanowych związki,
selektywnie alkilują DNA w miejscu N7 guaniny, powodując rozszczepienie DNA. Glicydol
znajduje zastosowania w syntezie chiralnych syntonów C3 (tzw. chironów), będących
związkami wykorzystywanymi do syntezy leków. Przykładem jest lek (S)-propranolol,
stosowany w schorzeniach układu sercowo-naczyniowego. Związek ten należy do
nieselektywnych β-blokerów, wykorzystywanych w chorobie niedokrwiennej serca
(wieńcowej). Szczególną uwagę zwraca się na zastosowanie glicydolu do syntezy
β-blokerów obniżających ciśnienie krwi, przywracających rytmiczność pracy serca oraz
poprawiających ogólną pracę mięśnia sercowego, w celu zwiększenia szans na przeżycie po
wystąpieniu ataku serca. Do grupy tych leków zaliczyć można: propafenon, dizopiramid,
werapamil, flekainid, tokainid, czy meksyletynę. Za wyjątkiem werapamilu, będącego
antagonistą kanałów wapniowych (IV grupa wg podziału Vaughana-Williamsa), mechanizm
działania pozostałych spośród wymienionych leków antyarytmicznych polega na blokowaniu
kanałów sodowych (I grupa wg Vaughana-Williamsa). Glicydol wykorzystuje się również do
produkcji związków powierzchniowo czynnych, wchodzących w skład: preparatów
kosmetycznych do nawilżania i oczyszczania skóry, szamponów do włosów, płynów do
kąpieli, past do zębów, detergentów do prania i środków dezynfekujących. Środki te to

22
również emulgatory spożywcze, stosowane do produkcji margaryn, lodów, czy masła
roślinnego [2-11].
W ramach niniejszej pracy przeprowadzono optymalizację parametrów
technologicznych procesu epoksydacji alkoholu allilowego 30-proc. nadtlenkiem wodoru na
katalizatorze Ti-SBA-15 i w acetonitrylu jako rozpuszczalniku.
2. OPTYMALIZACJA MATEMATYCZNA PROCESU EPOKSYDACJI AA - PLAN
ROTALNO-UNIFORMALNY
Optymalizację matematyczną procesu epoksydacji alkoholu allilowego za pomocą
30-proc. nadtlenku wodoru na katalizatorze Ti-SBA-15 oraz w acetonitrylu jako
rozpuszczalniku przeprowadzono w oparciu o plan rotalno-uniformalny, który zrealizowano
dla pięciu wielkości wejściowych x1-x5 (parametrów technologicznych) takich, jak:
x1: temperatura 20 - 40oC, x2: stosunek molowy alkoholu allilowego do nadtlenku wodoru
0,5 - 2,0, x3: stężenie acetonitrylu 75 - 90% wag., x4: ilość katalizatora Ti-SBA-15
2,0 - 4,0% wag. i x5: czas reakcji 120 - 240 minut.
Całkowita liczba układów planu (doświadczeń) wynosiła 32, w tym w jądrze planu 16,
w punktach gwiezdnych 10, a w centrum planu 6. Dla uproszczenia obliczeń wartości
rzeczywiste wielkości wejściowych x1-x5 przeliczono na wartości normowane
(bezwymiarowe) uzyskując uniwersalny plan doświadczeń o wartościach wielkości
wejściowych normowanych w bezwymiarowym przedziale [-2, 2].
W Tabeli 1 przedstawiono wartości rzeczywiste i normowane wielkości wejściowych
na poziomach wynikających z planu doświadczeń.
Tabela 1. Poziomy zmian parametrów procesu epoksydacji alkoholu allilowego
Jako główną funkcję odpowiedzi, charakteryzującą proces epoksydacji AA, przyjęto
selektywność przemiany do glicydolu w odniesieniu do przereagowanego AA (Sglic./AA).
W Tabeli 2 przedstawiono macierz planowania w postaci wartości normowanych oraz
otrzymane doświadczalnie rzeczywiste wartości funkcji odpowiedzi (Sglic./AA).
Poziom
Normowane wartości
Temperatura [oC]
Stosunek molowy AA/H2O2
Stężenie acetonitrylu
[% wag.]
Ilość katalizatora Ti-SBA-15 [% wag.]
Czas reakcji [min]
Xi x1 x2 x3 x4 x5
Gwiazdowy wyższy
2 40 2,0 90 4,0 240
Wyższy 1 35 1,6 86 3,5 210
Podstawowy 0 30 1,3 83 3,0 180
Niższy -1 25 0,9 79 2,5 150
Gwiazdowy
niższy -2 20 0,5 75 2,0 120
x1, x2, x3, x4, x5 - czynniki niezależne (parametry procesu)

23
Tabela 2. Macierz planowania doświadczeń oraz wartości funkcji odpowiedzi (Sglic./AA)
Wpływ normowanych czynników niezależnych (X1X5) procesu epoksydacji alkoholu
allilowego na wartość funkcji odpowiedzi przedstawiono za pomocą wielomianu
algebraicznego drugiego stopnia (równanie regresji - Z1) zgodnie z równaniem znajdującym
się w naszej wcześniejszej publikacji [12].
Aby otrzymać funkcję odpowiedzi zawierającą rzeczywiste współczynniki funkcji
aproksymującej i rzeczywiste wielkości wejściowe xk (parametry technologiczne),
normowane wartości wielkości wejściowych Xk przeliczano na rzeczywiste stosując
następujące wzory: I) X1: 0,2*(x1-20)-2, II) X2: 2,667*(x2-0,5)-2, III) X3: 0,2667*(x3-75)-2,
IV) X4: 2*(x4-2)-2 i V) X5: 2*(x5-2)-2.
Współczynniki równania regresji (Z1) dla normowanych wielkości wejściowych
wyznaczono metodą najmniejszych kwadratów - przy zastosowaniu rachunku
macierzowego. Dla badanej funkcji wyznaczano funkcję aproksymującą, po czym
sprawdzono jej adekwatność testem Fishera-Snedecora, przez porównanie z krytyczną
Numer układu planu X1 X2 X3 X4 X5 Sglic./AA
1 -1 -1 -1 -1 -1 66
2 1 -1 1 -1 -1 59
3 1 -1 -1 -1 1 31
4 1 -1 -1 1 -1 42
5 1 1 -1 -1 1 64
6 -1 1 1 -1 1 91
7 -1 1 -1 1 1 45
8 -1 1 -1 1 -1 80
9 1 -1 1 1 1 51
10 -1 -1 -1 1 1 32
11 -1 -1 1 1 -1 55
12 -1 -1 1 -1 1 53
13 -1 1 1 1 1 67
14 1 1 -1 1 1 71
15 1 1 1 1 -1 48
16 1 1 1 -1 1 62
17 -2 0 0 0 0 51
18 2 0 0 0 0 46
19 0 -2 0 0 0 77
20 0 2 0 0 0 55
21 0 0 -2 0 0 38
22 0 0 2 0 0 94
23 0 0 0 -2 0 57
24 0 0 0 2 0 48
25 0 0 0 0 -2 53
26 0 0 0 0 2 42
27 0 0 0 0 0 44
28 0 0 0 0 0 46
29 0 0 0 0 0 39
30 0 0 0 0 0 58
31 0 0 0 0 0 45
32 0 0 0 0 0 46

24
wartością F(0,05) odczytaną z tablic [13]. Ponadto obliczano także: a) wariancję
powtarzalności doświadczeń (S2powt.), b) współczynnik powtarzalności doświadczeń (fpowt.),
c) wariancję adekwatności doświadczeń (S2adek.), e) współczynnik adekwatności
doświadczeń (fadek.), f) współczynnik korelacji wielowymiarowej (R) oraz g) maksymalny błąd
bezwzględny (zmax), które wynosiły odpowiednio: 39,47; 5; 176,3; 10; 0,86 i 19,59 [14-15].
Dostatecznie wysokie wartości współczynnika R świadczą o dobrej korelacji wartości funkcji
uzyskanych doświadczalnie z wartościami funkcji aproksymującej uzyskanymi na drodze
obliczeń matematycznych.
W Tabeli 3 przedstawiono współczynniki równia regresji w postaci normowanej (z1).
Tabela 3. Współczynniki równia regresji w postaci normowanej - z1
z1
b00 46,560* b22 4,690*
b01 -2,960 b23 -2,440
b02 3,960* b24 2,060
b03 6,960* b25 1,060
b04 -1,790 b33 4,690*
b05 -4,790* b34 -3,940
b11 0,310 b35 3,310
b12 -0,940 b44 1,320
b13 -1,940 b45 5,310*
b14 0,060 b55 0,068
b15 6,060*
* - współczynniki istotne
Maksimum otrzymanego równania regresji wyznaczono matematycznie, przy
wykorzystaniu programu komputerowego Cadex. Do obliczeń zastosowano metody:
Hookea-Jeevesa oraz Gaussa-Seidela. Wyznaczone tymi metodami maksymalne wartości
zmiennych niezależnych dla danej funkcji regresji były identyczne.
W Tabeli 4 przedstawiono maksymalną wartość funkcji - selektywności przemiany do
glicydolu w odniesieniu do przereagowanego alkoholu allilowego (z1) oraz odpowiadające jej
rzeczywiste wartości zmiennych niezależnych.
Tabela 4. Parametry określające maksymalne wartości funkcji odpowiedzi z1
Z Tabeli 4 wynika, że optymalne parametry, pozwalające otrzymać najwyższą
wartość selektywności przemiany do glicydolu w odniesieniu do przereagowanego AA
(100% mol), są następujące: temperatura 21˚C, stosunek molowy reagentów 0,7, ilość
katalizatora Ti-SBA-15 2,4% wag. i czas reakcji 121 minut.
Przebiegi badanej funkcji przedstawiono na rysunkach warstwicowych, które
wykreślono przy jednoczesnych zmianach dwóch parametrów procesu. Natomiast pozostałe
Funkcje Jednostka z1: Sglic./AA
Maksymalna wartość funkcji [% mol] 100
Temperatura [°C] 21
Stosunek molowy AA/H2O2 - 0,7
Stężenie acetonitrylu [% wag.] 90
Ilość Ti-SBA-15 [% wag.] 2,4
Czas reakcji [min] 121

25
parametry były stałe i przyjmowały wartości zgodne z tymi, które wyznaczono dla maksimum
badanej funkcji. Ponadto zakresy zmian parametrów, pozwalających uzyskać wysokie
wartości badanej funkcji, ustalono graficznie.
3. WPŁYW ZMIAN DWÓCH WYBRANYCH PARAMETRÓW PROCESU EPOKSYDACJI
ALKOHOLU ALLILOWEGO 30-PROC. NADTLENKIEM WODORU NA GŁÓWNĄ
FUNKCJĘ OPISUJĄCĄ PROCES - SELEKTYWNOŚĆ PRZEMIANY DO GLICYDOLU
W ODNIESIENIU DO PRZEREAGOWANEGO ALKOHOLU ALLILOWEGO
3.1. Wpływ temperatury i stosunku molowego alkoholu allilowego do nadtlenku
wodoru na selektywność przemiany AA do glicydolu
Na Rysunku 1 przedstawiono wpływ zmian dwóch wybranych parametrów:
temperatury i stosunku molowego AA/H2O2 na selektywność przemiany do glicydolu
w odniesieniu do przereagowanego alkoholu allilowego.
Rys. 1. Zmiany selektywności przemiany do glicydolu w odniesieniu do przereagowanego
alkoholu allilowego, zależności: temperatura - stosunek molowy AA/H2O2
Szczegółowa analiza Rysunku 1 pokazuje, że w zakresie temperatur od 20 do 40˚C
i dla stosunku molowego reagentów od 0,5 do 0,7 możliwe jest uzyskanie najwyższej
wartości selektywności przemiany do glicydolu w odniesieniu do przereagowanego alkoholu
allilowego (100% mol). W tych warunkach obserwuje się największą trwałość pierścienia
epoksydowego glicydolu. Zwiększanie stosunku molowego reagentów, powoduje obniżenie
wartości tej funkcji, gdyż zwiększanie ilości cząsteczek AA w mieszaninie reakcyjnej utrudnia
dostęp cząsteczkom nadtlenku wodoru do centrów aktywnych Ti, w związku z czym
epoksydacja AA nie zachodzi. Z drugiej jednak strony wzrasta tendencja do eteryfikacji
cząsteczek AA i tworzenia eteru diallilowego.

26
3.2. Wpływ temperatury i stężenia acetonitrylu na selektywność przemiany AA do
glicydolu
Na Rysunku 2 przedstawiono zmiany selektywności przemiany do glicydolu
w odniesieniu do przereagowanego alkoholu allilowego podczas współdziałania dwóch
wybranych parametrów: temperatury i stężenia rozpuszczalnika.
Rys. 2. Zmiany selektywności przemiany do glicydolu w odniesieniu do przereagowanego
alkoholu allilowego, zależności: temperatura - stężenie acetonitrylu
Z Rysunku 2, przedstawiającego zależność temperatury i stężenia acetonitrylu
wynika, że dla temperatur w zakresie od 20 do 22°C i stężeń rozpuszczalnika od 89 do
90% wag. możliwe jest osiągnięcie najwyższej selektywności przemiany do glicydolu.
Podwyższanie temperatury reakcji, powoduje natomiast obniżenie wartości badanej funkcji
od 100 do nawet 5% mol. Ponadto zwiększenie stężenia rozpuszczalnika w wybranej
temperaturze powoduje znaczący wzrost selektywności przemiany AA do glicydolu od np.
około 52 do 100% mol (temperatura 20°C). Być może cząsteczki polarnego rozpuszczalnika
aprotonowego otaczając cząsteczki glicydolu zwiększają jego trwałość oraz ograniczają
zajście hydrolizy pierścieni oksiranowych glicydolu.
3.3. Wpływ temperatury i zawartości katalizatora Ti-SBA-15 na selektywność
przemiany AA do glicydolu
Na Rysunku 3 przedstawiono wpływ zmian dwóch wybranych parametrów:
temperatury i zawartości katalizatora Ti-SBA-15 na selektywność przemiany do glicydolu
w odniesieniu do przereagowanego alkoholu allilowego.

27
Rys. 3. Zmiany selektywności przemiany do glicydolu w odniesieniu do przereagowanego
alkoholu allilowego, zależności: temperatura - ilość katalizatora Ti-SBA-15
Z Rysunku 3, przedstawiającego zależność temperatura-ilość katalizatora Ti-SBA-15
wynika, że w zakresie temperatur od 20 do 26°C i przy zawartości katalizatora od 2,0 do
2,4% wag., możliwe jest osiągnięcie selektywności przemiany do glicydolu równej 100% mol.
W wyższych temperaturach i przy wyższych zawartościach katalizatora, nie obserwuje się
tak wysokiej wartości tej funkcji. Wzrost temperatury obniża bowiem trwałość pierścienia
epoksydowego, w wyniku czego dochodzi do jego uwodnienia. Natomiast wzrost ilości
katalizatora wzmaga zjawisko nieefektywnego rozkładu nadtlenku wodoru na centrach
aktywnych.
3.4. Wpływ temperatury i czasu prowadzenia reakcji na selektywność przemiany AA
do glicydolu
Na Rysunku 4 przedstawiono zmiany selektywności przemiany AA do glicydolu
w odniesieniu do przereagowanego alkoholu allilowego podczas współdziałania dwóch
wybranych parametrów: temperatury i czasu prowadzenia reakcji.
Rys. 4. Zmiany selektywności przemiany do glicydolu w odniesieniu do przereagowanego
alkoholu allilowego, zależności: temperatura - czas reakcji

28
Szczegółowa analiza Rysunku 4 pokazuje, że najwyższą selektywność przemiany do
glicydolu (100% mol) uzyskuje się w najniższych temperaturach (od 20 do 21°C) oraz przy
najkrótszych czasach prowadzenia reakcji (od 120 do 121 minut). Ponadto w tych
najniższych temperaturach podczas wydłużania czasu reakcji od 120 do 240 minut następuje
obniżenie wartości badanej funkcji od 100 do 27% mol. Powodem może być hydroliza
pierścieni epoksydowych, prowadząca do uwodnienia glicydolu do gliceryny.
4. WNIOSKI Z MATEMATYCZNEJ OPTYMALIZACJI PROCESU EPOKSYDACJI
ALKOHOLU ALLILOWEGO 30-PROC. NADTLENKIEM WODORU NA KATALIZATORZE
Ti-SBA-15 ORAZ W ACETONITRYLU JAK ROZPUSZCZALNIKU
Wyniki uzyskane podczas optymalizacji procesu epoksydacji alkoholu allilowego
30-proc. nadtlenkiem wodoru na katalizatorze Ti-SBA-15 oraz w acetonitrylu jako
rozpuszczalniku pokazują, że w wyznaczonej optymalnej temperaturze (21°C), możliwe jest
uzyskanie najwyższej wartości selektywności przemiany do glicydolu - 100% mol. Ponadto
tak wysoka selektywność przemiany do produktu głównego (posiadającego bardzo liczne
zastosowania praktyczne) ułatwia wydzielanie tego związku z roztworu poreakcyjnego, a tym
samym obniża to koszty związane z otrzymywaniem czystego produktu epoksydowego.
Proces epoksydacji zachodzi z najwyższą selektywnością przy stosunku molowym
alkoholu allilowego do nadtlenku wodoru 0,7, co ułatwia rozdział mieszaniny poreakcyjnej,
bez konieczności zawracania do procesu dużych ilości nie zużytego w procesie związku
allilowego.
Zastosowanie acetonitrylu jako środowiska reakcji (w ilości 90% wag.) umożliwia
zajście procesu z wysoką selektywnością. Ponadto cząsteczki polarnego rozpuszczalnika
aprotonowego w mieszaninie reakcyjnej wpływają na trwałość pierścieni epoksydowych
glicydolu ograniczając zjawisko hydrolizy tych pierścieni.
Optymalną zawartością katalizatora Ti-SBA-15 umożliwiającą uzyskanie związku
epoksydowego ze 100% selektywnością była ilość wynosząca 2,4% wag.
Natomiast czas równy 121 minut umożliwił zajście procesu z najwyższą
selektywnością.
Wyznaczone parametry optymalne otrzymywania glicydolu pozwalają prowadzić
proces epoksydacji w łagodnych warunkach (niska temperatura procesu, ciśnienie
atmosferyczne), przy zachowaniu zasad ochrony środowiska (minimalizacja ilość odpadów)
oraz wyeliminować zjawisko hydrolizy pierścienia epoksydowego glicydolu, a tym samym
ograniczyć ilość powstających produktów ubocznych.
Matematyczna metoda planowania doświadczeń i analiza przebiegu funkcji pozwoliła
określić:
- zakresy zmian parametrów, w których funkcja przyjmuje najwyższą wartość (a)
temperatura: 20 - 40˚C, b) stosunek molowy reagentów: 0,5 - 0,7, c) ilość katalizatora
Ti-SBA-15: 2,0 - 2,4% wag. oraz d) czas reakcji: 120 - 121 minut,
- zakresy zmian dwóch wybranych parametrów, w których funkcja przyjmuje najwyższą
wartość (a) temperatura 20 - 40˚C : stosunek molowy reagentów 0,5 - 0,7, b) temperatura
20 - 22˚C : stężenie acetonitrylu 89 - 90% wag., c) temperatura 20 - 26˚C : zawartość
katalizatora Ti-SBA-15 2,0 - 2,4% wag. oraz d) temperatura 20 - 21˚C : czas reakcji
120 - 121 minut.

29
5. LITERATURA
[1] A. Wróblewska, E. Makuch, E. Sokalska i in., Acetonitrile and water as solvents for the
epoxidation of allylic compounds over the Ti-SBA-15 catalyst, 2014, Reaction Kinetics,
Mechanisms and Catalysis, 113, 519-542,
[2] K. Toshima, Y. Okuno, S. Matsumura, Glycidol-carbohydrate hybrids: a new family of
DNA alkylating agents, 2003, Bioorganic & Medicinal Chemistry Letters, 13(19),
3281-3283,
[3] H.S. Bevinakatti, A.A. Banerji, Practical chemoenzymic synthesis of both enantiomers
of propranolol, 1991, Journal of Organic Chemistry, 56(18), 5372-5375,
[4] Y. Kiyotsuka, J. Igarashi, Y. Kobayashi, A study toward a total synthesis of fostriecin,
2002, Tetrahedron Letters, 43(15), 2725-2729,
[5] J.M. Klunder, S.Y. Ko, K.B. Sharpless, Asymmetric epoxidation of allyl alcohol: efficient
routes to homochiral ß-adrenergic blocking agents, 1986, Journal of Organic
Chemistry, 51, 3710-3712,
[6] R.M. Hanson, The synthetic methodology of nonracemic glycidol and related 2,3-epoxy
alcohols, 1991, Chemical Reviews, 91(4), 437-475,
[7] R. Mehvar, D.R. Brocks, M. Vakily, Impact of stereoselectivity on the pharmacokinetics
and pharmacodynamics of antiarrhythmic drugs, 2002, Clinical Pharmacokinetics,
41(8), 533-558,
[8] J. Cossy, F. Pradaux, S. BouzBouz, Synthesis of the C1-C12 fragment of fostriecin,
2001, Organic Letters, 3(14), 2233-2235,
[9] A. Dworak, S. Słomkowski, T. Basinska i in., Polyglycidol-how is it synthesized and
what is it used for?, 2013, Polimery, 58(9), 641-649,
[10] J. Khandare, A. Mohra, M. Calderón i in., Structure-biocompatibility relationship of
dendritic polyglycerol derivatives, 2010, Biomaterials, 31(15), 4268-4277,
[11] H. Frey, R. Haag, Dendritic polyglycerol: a new versatile biocompatible material,
2002, Biotechnology and Molecular Biology Reviews, 90, 257-267,
[12] A. Wróblewska, E. Makuch, M. Dzięcioł i in., The utilization of the mesoporous
Ti-SBA-15 catalyst in the epoxidation of allyl alcohol to glycidol and diglycidyl ether in
the water medium, 2015, Polish Journal of Chemical Technology, 17(4), 23-31,
[13] W. Zieliński, Tablice statystyczne, Wykłady ze statystyki i doświadczalnictwa, 1999,
Wydawnictwo Fundacja Rozwój SGGW, wydanie III poprawione i uzupełnione,
1-84,
[14] Z. Polański, Planowanie doświadczeń w technice - metodologia, 1984, Państwowe
Wydawnictwo Naukowe, 1-290,
[15] Z. Polański, Współczesne metody badań doświadczalnych, 1978, Wiedza
Powszechna, 1-216.

30
Rozdział III: Model matematyczny w strategii kształtowania odpowiedniej ceny
i promocji na bazie rabatów i upustów
Jacek Wawrzosek, Szymon Ignaciuk
Katedra Zastosowań Matematyki i Informatyki Uniwersytet Przyrodniczy w Lublinie ul. Głęboka 28, 20-612 Lublin [email protected], [email protected]
Streszczenie
W pracy konstruuje się model kalkulacji finansowej zakładającej funkcjonowanie firmy
oferującej duże rabaty. Analizuje się możliwość rzeczywistego funkcjonowania takiego
modelu przy niektórych uwarunkowaniach rynku. Opracowany model pozwala na
innowacyjne spojrzenie na proces zakupu-sprzedaży. Model uwzględnia zachowania trzech
podmiotów: sprzedawcy, klienta oraz państwa.
Abstract
This study develops a model of financial calculation, assuming the operation of
a company offering large rebates. The possibility of real functioning of such a model in some
market conditions is analysed. The developed model allows for an innovative approach to the
purchase-sale process. The model includes considerations for the behaviour of three entities:
seller, customer and the state.
Słowa kluczowe: marketing, cena, rabat, marża, narzut, promocja
Keywords: marketing, price, rebate, profit margin, markup, promotion
1. Wstęp
Marketing posiada wiele naukowych definicji. Często za marketing uważa się aktywny
handel, który wychodzi naprzeciw potrzeb klienta, próbuje odgadnąć te skryte, usiłuje je
uświadamiać oraz pobudzać, a nawet kreować i zaspokajać je. W marketingu najważniejsza
jest świadomość, że klient i jego oczekiwania to najważniejszy element biznesu [3, 7]. Przy
tym proces identyfikowania i zaspokajania potrzeb klienta winien równocześnie zapewnić
należyty zysk przedsiębiorstwa i ciągłość jego funkcjonowania. Samą działalność marketingu
oparto na pięciu podstawowych filarach: produkcie, cenie, dystrybucji, promocji oraz
personelu (tzw. marketing-mix) [2].
Każdy handlowiec wraz z każdym swym klientem znajdują się na przeciwległych lecz
przyciągających się biegunach procesu pobudzania do transakcji poprzez narzędzie
upustów. Najprostsze cele tych kontrahentów są zazwyczaj przeciwstawne i są opisane
wysokością ceny sprzedaży. Przy tym oferowana cena posiada swe ograniczenia
obiektywne choćby w postaci kosztów nabycia towaru do dystrybucji powiększone o te
związane z kosztami dystrybucji i promocji oraz również te wynikające z poziomu
zamożności klienta. Czynnik psychologiczny skutecznego marketingu musi uwzględniać
również najlepiej znaczną wysokość rabatów czy upustów cenowych [5].
Współczesny klient najczęściej poszukuje pełnowartościowego towaru
w promocyjnej, niekiedy okazyjnej cenie. Równocześnie świadomy tego handlowiec za
pomocą odpowiedniego rabatu bądź upustu skłania potencjalnego klienta do

31
przeprowadzenia z nim transakcji zakupu. Masowo procesy te odbywają się od dawna mniej
lub bardziej zdroworozsądkowo, heurystycznie lub intuicyjnie. Przy tym już sam proces
ustalania zwykłej marży jest na tyle skomplikowany, że wielokrotnie niepokoi początkujących
handlowców [6] i jest przedmiotem licznych dyskusji internetowych [10]. Stanowi również
przedmiot dyskusji co do zasadności orzeczeń sądowych [1, 4, 9]. Zagadnienia te dotyczą
nie tylko gotowego do sprzedaży produktu, ale przenoszą się również na problematykę
zarządzania transportem towaru [8]. Programy do obsługi sprzedaży pomagają handlowcom
proponując przy tym pewne rozwiązania [11]. Zaś problem ustalenia rabatów by zachęcać
klienta i przy tym „wyjść na swoje” spowodował powstanie forum internetowego, które
prowadzi ożywione dyskusje na ten temat [12]. Przy tym udzielane porady nie są wolne od
błędów.
Dopiero kompleksowy model matematyczny dobierania ceny sprzedaży
pełnowartościowego towaru z uwzględnieniem zachęcającego rabatu od pierwotnej ceny
sprzedaży pozwala dostrzec nieuświadomione obiektywne przesłanki kształtujące proces
promocji na bazie tych rabatów. Poniżej ilustruje to kilka wykresów i przykładów również
liczbowych kompozycji ceny z rabatem. Lecz dla porządku rozważań na wstępie należy
wprowadzić oznaczenia i przypomnieć podstawowe pojęcia handlu.
2. Różnica pomiędzy upustem a rabatem
Różnicę pomiędzy upustem U, a rabatem R formułuje się następująco. Otóż rabat
wyrażany jest na skali procentowej, natomiast upust przedstawiony jest za pomocą
konkretnej kwoty pieniężnej:
%100
%1=
=
][s%100
%
z
z
RwalutaCswalutaCs
walutaUwalutaCswalutaCs
walutaCR
walutaU
brr
brr
br
(1)
gdzie brCs - cena sprzedaży bez rabatu, rCsz - cena sprzedaży z rabatem. Zatem upust
U jest formułowany w kwotach bezwzględnych zaś rabat R w jednostkach względnych.
Ze względu na to, że bardziej praktyczne dla teoretycznych rozważań jest pojęcie
rabatu niż upustu, gdyż jest ono niezależne od konkretnej sytuacji na rynku - modyfikującej
kwotę wejściową (pierwotną cenę sprzedaży bez rabatu brCs ). Teoretyczny model
matematyczny winien na nim bazować. Podobnie skala procentowa bardziej użyteczna jest
do wyrażania nieco różniących się a opisanych poniżej pojęć marży M i narzutu N.
3. Duży rabat jako zwyczaj handlowy i jako chwyt reklamowy
Przykład 1. Twierdziło się, że pierwszy klient w sklepie przedwojennego Żyda nie wychodził
z niego z pustymi rękoma. Kupując towar z 80% rabatem klient wciąż nie wiedział, czy gdyby
targował się dłużej nie kupiłby taniej [13].
Przykład 2. Klient znalazł w hurtowni interesujący go trudno osiągalny towar, który nie ma
dołączonej ceny sprzedaży. Sprzedawca poszukujący towaru w swej bazie komputerowej
z góry proszony jest przez klienta o znaczny upust dający mu atrakcyjną cenę. Klient

32
dowiedziawszy się, że może uzyskać jedynie R = 5% rabat dalej prowadzi pertraktacje
rabatowe bez znajomości samej ceny sprzedaży. Sprzedawca zniecierpliwiony
nieustępliwością klienta oferuje mu upragniony przez niego aż R’ = 50% rabat. Przy tym
początkową w kalkulacji wejściową cenę sprzedaży bez rabatu rCsb na fakturze zwiększa do
brCs' tak by wyjściowa cena sprzedaży z rabatem rCsz po R’ = 50% rabacie pozostała na
tym samym poziomie jak przy kalkulacji z R = 5% rabatem tj.:
walutaCsR
walutaCsR
walutaCs brbrzr '%100
%'1
%100
%1
(2)
Z (1) widać, że jeżeli %100' RrR opisuje multiplikatywną modyfikację rabatu R
multiplikatorem rabatu r, to wówczas aby obrana docelowa cena zrCs z rabatem nie uległa
zmianie, z (2) zauważamy, że początkową cenę sprzedaży bez rabatu brCs należy
zmodyfikować multiplikatorem ceny:
[%]%100
[%]%100,
Rr
RrRc
zależnym od dwu zmiennych R oraz r tak, że:
brbr CsrRcCs ,'
Wówczas upust modyfikowany jest multiplikatorem upustu:
rrRcrRu ,,
tak, że zależność pomiędzy upustami ma postać:
UrRuU ,'
Ponieważ w tym przykładzie 10r , zatem dziesięciokrotnie wyższy tu rabat R’
powoduje dziewiętnastokrotnie wyższy upust U’ = 19·U liczony od niemal dwukrotnie wyższej
ceny początkowej brbr CsCs 9,1' . Zazwyczaj dość atrakcyjnie są postrzegane przez klienta
wielkości tak wysokiego rabatu oraz upustu. Ale niekiedy mogą wzbudzać u niego też
i pewne kontrowersje o czym szerzej napisano poniżej.
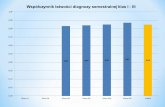
Na rys. 1, 2 i 3 przedstawiających wykresy multiplikatora rRc , ceny sprzedaży,
multiplikatora rRu , upustu oraz wykresy rc %,20 oraz ru %,20 dla %99'R
zauważa się, że:
1. dla większych R bariera %99'R osiągana jest dla mniejszych r,
2. bariera %99'R osiągana jest dla różnych wartości multiplikatorów rRc , ,
rRu , ,
3. multiplikatory ceny rRc , i upustu rRu , osiągają dość szybko olbrzymie
wartości dla rosnących R lub r.
Zatem klient domagając się wysokiego rabatu skłania sprzedawcę do znacznego
zawyżania pierwotnej ceny towaru. A wysoka wyjściowa cena towaru tworzy wrażenie

33
nabywania towaru wysokiej jakości, a sama procedura rabatowania sprawia wrażenie łaski
ze strony sprzedawcy lub krótkotrwałej okazji. Stąd rabatowanie staje się również czynnikiem
sprawczym wysokich cen towarów nieobjętych promocyjnym rabatowaniem.
Pełnowartościowy towar oznaczony kilkoma skreślonymi a kolejno zmniejszanymi cenami
sprawia wrażenie niezwykle atrakcyjnej cenowo okazji. Niekiedy sugeruje wysoką jakość
towaru i że udzielane rabaty są jedynie efektem okresowego „przewietrzania magazynów”.
Taka ekspozycja towaru koncentruje na nim uwagę klientów i skłania ich do niekiedy
nieplanowanego uczestniczenia w operacji kupna-sprzedaży. Tym samym burzy porządek
logicznego działania klienta i skłania go do zakupów większych niż wynika to z jego
faktycznych potrzeb.
Rys. 1. Wykres multiplikatora ceny sprzedaży bez rabatu jako funkcji c(R,r)
Rys. 2. Wykres multiplikatora upustu jako funkcji u(R,r)
0%
15%
30%
45%60%75%90%
0
10
20
30
40
50
60
70
80
1
1,6
2,2
2,8
3,4 4
4,6
5,2
5,8
6,4 7
7,6
8,2
8,8
9,4
10
10
,6
11
,2
11
,8
12
,4
13
13
,6
14
,2
14
,8
15
,4
16
16
,6
17
,2
17
,8
18
,4
19
19
,6
R
c(R,r)
r
Wykres funkcji c(R,r)
0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80
0%
26%
52%78%0
25
50
75
100
125
150
175
200
1 2 3 4 5 6 7 8 9
10
11
12
13
14
15
16
17
18
19
20
R
u(R,r)
r
Wykres funkcji u(R,r)
0-25 25-50 50-75 75-100 100-125 125-150 150-175 175-200

34
0
20
40
60
80
100
120
140
160
180
2000
5
10
15
20
25
30
35
40
1 1,5 2 2,5 3 3,5 4 4,5
u(20%,r)
c(20%,r)
r
Wykresy c(20%,r) oraz u(20%,r)
c(20%,r) u(20%,r)
Rys. 3. Wykres multiplikatora ceny sprzedaży bez rabatu jako funkcji c(R,r) oraz multiplikatora upustu jako funkcji u(R,r) dla R=2
Przykładowo z rys. 3 zauważamy, że chcąc zaoferować klientowi rabat R’=50%
zamiast R=20% należy odczytać z wykresu wartości c(R,r) i u(R,r) dla 5,2' RRr . Tym
samym należy 1,6 razy zwiększyć wyjściową cenę przed rabatem, a upust zwiększyć
czterokrotnie.
Zjawisko rabatowania towarzyszy marketingowym zabiegom oferującym wiele dóbr,
wartości lub usług. Zaś staranna, bliższa analiza procesu rabatowania uzmysławia
skomplikowany sposób wyrażania matematycznej zależności pomiędzy marżą czy narzutem
a rabatem.
4. Klasyczne rozróżnienia pomiędzy narzutem a marzą
Używane uproszczenia w języku potocznym często powodują niejasności
w rozumieniu niektórych pozornie bardzo podobnych do siebie terminów [14]. Tak jest
również z pojęciem marży i narzutu. W obu przypadkach intuicyjnie utożsamia się aż 4
pojęcia i np. rozumie się, że jest to zysk Z ze sprzedaży jednostki towaru czyli bezwzględnie
wyrażona różnica Z = Cs - Cz między ceną sprzedaży Cs a ceną zakupu towaru Cz (lub
kosztem wytworzenia jednostki produktu). I w rzeczywistości zarówno marża M jak i narzut N
powodują identyczną co do wartości wyrażonej w walucie różnicę między ceną sprzedaży Cs
a ceną zakupu Cz. Lecz ponieważ marżę i narzut można w jednostkach bezwzględnych
wyrazić kwotowo z uwagi na: 1) łącznie sprzedaną ilość towaru i usług, lub z uwagi na 2)
jednostkową ich ilość, lub najczęściej jednak zarówno marżę jak i narzut podaje się
w procentach [%], czyli w jednostkach względnych, odpowiednio wyrażane 3) w stosunku do
ceny sprzedaży Cs lub 4) w stosunku do ceny zakupu Cz. Stąd te ostatnie dwie wielkości nie
są już sobie równe ponieważ inaczej się je względnie oblicza.
Innymi słowy, wyrażona bezwzględnie (w walucie) marża (brutto) jest to zysk
uzyskany z łącznej sprzedaży towarów i usług.
𝑀𝑎𝑟ż𝑎 𝐵𝑟𝑢𝑡𝑡𝑜 = 𝑃𝑟𝑧𝑦𝑐ℎ𝑜𝑑𝑦 𝑧𝑒 𝑠𝑝𝑟𝑧𝑒𝑑𝑎ż𝑦 − 𝐾𝑜𝑠𝑧𝑡 𝑠𝑝𝑟𝑧𝑒𝑑𝑎𝑛𝑦𝑐ℎ 𝑝𝑟𝑜𝑑𝑢𝑘𝑡ó𝑤, 𝑡𝑜𝑤𝑎𝑟ó𝑤 𝑖 𝑚𝑎𝑡𝑒𝑟𝑖𝑎łó𝑤
Zaś marża brutto (ang. gross margin) w ujęciu względnym (tj. wyrażona w %) jest to
stosunek zysku brutto ze sprzedaży do przychodów. Zależność tą przedstawia następujące
równanie:
𝑀𝑎𝑟ż𝑎 𝐵𝑟𝑢𝑡𝑡𝑜 = (𝑃𝑟𝑧𝑦𝑐ℎ𝑜𝑑𝑦 − 𝐾𝑜𝑠𝑧𝑡 𝑠𝑝𝑟𝑧𝑒𝑑𝑎𝑛𝑦𝑐ℎ 𝑝𝑟𝑜𝑑𝑢𝑘𝑡ó𝑤, 𝑡𝑜𝑤𝑎𝑟ó𝑤 𝑖 𝑚𝑎𝑡𝑒𝑟𝑖𝑎łó𝑤
𝑃𝑟𝑧𝑦𝑐ℎ𝑜𝑑𝑦) ∙ 100%

35
Koszty sprzedanych produktów, towarów i materiałów odnoszą się do całości
nakładów połączonych bezpośrednio z produktem np.: koszty energii, koszty pracy, koszty
materiałów. Nie wlicza się do nich kosztów administracji, wydatków na biuro, czynsz itp.
Podobnie jednostkowo i bezwzględnie wyrażona marża oznacza zysk Z będący
różnicą pomiędzy ceną sprzedaży a kosztem jednostki towaru. Względnie wyrażona marża
M jednostkowego zysku Z liczy się ze wzoru:
%1001%100%100%
walutaCs
walutaCz
walutaCs
walutaCzwalutaCs
walutaCs
walutaZM (3)
Marżę zysku oblicza sprzedawca wtedy, kiedy chce wiedzieć jaką część przychodów ze
sprzedaży stanowi jego „zysk”:
Z[waluta]=M[%]·Cs[waluta]/100% (4)
Zatem:
%100
%1
MwalutaCswalutaCz (5)
Marża bezwzględnie i względnie wyraża cząstkę ceny sprzedaży Cs jaką stanowi zysk. Tak
naprawdę nie jest to faktyczny zysk netto – jest to kwota, która zawiera kwotę niezbędną na
pokrycie kosztów stałych, a dopiero ewentualna nadwyżka jest zyskiem netto sprzedawcy.
Dlatego marżę zysku nazywa się niekiedy marżą na pokrycie (kosztów stałych). Znajomość
marży jest potrzebna do wyznaczenia niżej opisanego progu rentowności sprzedaży.
Ponadto:
[%]%100
[%]1
[%]%100
%100
M
MwalutaCz
M
walutaCzwalutaCs (6)
Zatem:
[%]%100
[%]
M
MwalutaCzwalutaZ
(7)
Podobnie bezwzględnie wyrażony narzut jest to kwota, o którą powiększono koszt zakupu
towaru, aby ustalić cenę jego sprzedaży. Narzut względnie oblicza się ze wzoru:
%1001%100%100%
walutaCz
walutaCs
walutaCz
walutaCzwalutaCs
walutaCz
walutaZN (8)
Celem ustalenia ceny sprzedaży najczęściej sprzedawca stosuje narzut:
%100
%1
NwalutaCzwalutaZwalutaCzwalutaCs (9)
Zależność między marżą a narzutem wyrażają następujące wzory:
%100[%]%100
[%][%]
M
MN (10)

36
%100[%]%100
[%][%]
N
NM , (11)
gdzie (10) i (11) wynikają bezpośrednio ze wzorów (6) i (9).
Zatem wzór (7) można zapisać jako
%100
[%]NwalutaCzwalutaZ (12)
zaś wzory (10) i (11) można zapisać jako
1[%]
%100
[%]
%100
NM (13)
Z wzoru (13) wynika, że
[%][%] MN (14)
oraz, że
%100
[%][%][%][%]
MNMN
(15)
Przykład 3. Rozważmy towar zakupiony za cenę 100 PLN netto, Przy marży 20% cena
sprzedaży wynosi: 125 PLN netto, natomiast narzut w tym przypadku wynosi 25%. Stąd N –
M = 5%. Przy marży 99,00% cena sprzedaży wynosi: 10 000 PLN netto, natomiast narzut
w tym przypadku wynosi 9900%. Stąd N – M = 9801%.
5. Narzut i marża a rabat
Na podstawie (9), (5) i (1) wnioskujemy, że narzut powiększa Cz do Cs, marża
zmniejsza Cs do Cz, zaś rabat R zmniejsza brCs - cenę sprzedaży bez rabatu do rCsz -
ceny sprzedaży z rabatem. Utożsamiając zaś Cs z brCs zauważamy, że sprzedawca nie
poniesie „pierwszorzędnej” straty, gdy CzCs r z, tj. gdy [%][%] RM
Rzeczywiście odstępując od pierwotnej marży M poprzez udzielenie rabatu R ostateczną
zrealizowaną cenę sprzedaży z rabatem obliczymy wg. wzoru:
%100
%1
%100
%1=z
RNwalutaCzwalutaCs r . (16)
Podczas, gdy ostateczną zrealizowaną marżę M’ sprzedaży z rabatem obliczymy wg. wzoru
(5):
%100
%'1
MwalutaCswalutaCz zr (17)

37
Zatem z (16) i (17) zrealizowana marża M’ wynosi:
%100
%1
%100
%1
%100%100[%]'
RNM . (18)
Warunek CzCs r z jest spełniony, gdy:
1
%100
%1
%100
%1
RN (19)
tj. gdy:
%100
%
[%]%100
%
%100
% M
N
NR
(20)
Zatem maksymalny rabat, gdy sprzedawca nie poniesie „pierwszorzędnej” straty wynosi:
%[%]%100
%100%%max M
N
NR
(21)
a jego wykres prezentuje rys. 4.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Rmax[%]
narzut N [%]
Maksymalny rabat by nie ponieść „pierwszorzędnej” straty [%]
Rys. 4. Maksymalny rabat, by sprzedawca nie poniósł „pierwszorzędnej” straty
Przykład 4. Gdy do ceny zakupu 100 PLN netto dodajemy narzut w wysokości 30%, czyli 30
PLN uzyskujemy cenę sprzedaży 130 PLN netto zawierającą 23,07669% marży. Jeżeli
następnie udzielimy później 30 % rabatu, to 130 PLN netto pomniejszone o 30 % daje 91
PLN netto będące poniżej ceny zakupu. Ale dopiero 142,86 PLN netto pomniejszone o 30%
rabat daje 100 PLN netto. Wnioskujemy stąd, że przy 30% narzucie aby sprzedawca nie
poniósł „pierwszorzędnej” straty rabat nie winien przekroczyć pierwotnej zakładanej marży
w wysokości ok. 23%. Rozumowanie to odzwierciedla kalkulację sprzedawcy. Równocześnie
klient sklepu oferującego 50% (70%) rabat winien być świadom, że sprzedawca by nie mieć
pierwszorzędnej straty na tym towarze musiał zastosować co najmniej 100% (234%) narzut
(patrz rys. 4). Rozumowanie to odzwierciedla kalkulację klienta. A ten świadomy wielkości
tych parametrów niekoniecznie zareaguje na skierowaną do niego zachętę poprzez wysokie
rabaty.

38
Właściwe obliczanie marży pojedynczych towarów spowoduje, że sprzedawca osiągnie
zakładaną marżę brutto od łącznej sprzedaży.
6. Zawyżony narzut jako funkcja dużego rabatu
We wzorze (16) przyjmijmy N jako znacznie zawyżony narzut pozwalający w celach
reklamowych wygenerować wysoką wstępną cenę sprzedaży sugerującą wysoką wartość
towaru, od której następnie udzielono znacznego rabatu R ale tak, by uzyskać rzeczywisty
narzut na obranym poziomie N’ lecz bez rabatu, gdzie:
%100
%'1
NwalutaCzwalutaCsbr . (22)
Założona przez sprzedawcę równość lewych stron (16) i (22) oznacza równość czynników
przy Cz w (16) i (22). Na podstawie (16) i (22) zauważamy, że pozorny zawyżony narzut N
znacznie zawyżający rzeczywistą wartość towaru jest funkcją dwóch zmiennych: tworzonego
w celach reklamowych znacznego rabatu R oraz rzeczywistego narzutu ustalonego na
obranym pożądanym poziomie N’:
%1001[%]%100
[%]'%100',
R
NNRN . (23)
Zauważmy, że (23) można zapisać jako
[%][%]'[%]%100
%100', RN
RNRN
(24)
co oznacza, że pomimo swej skomplikowanej postaci (rys. 5) można zauważyć, że dla
ustalonej wielkości rabatu R funkcja pozornego zawyżonego narzutu ', NRN jest funkcją
liniową obranego poziomu pożądanego rzeczywistego narzutu N’. Zaś dla ustalonej wielkości
rzeczywistego narzutu N’ funkcja pozornego zawyżonego narzutu ', NRN jest funkcją
homograficzną zależną od rabatu R, której wartości w przedziale <0%; 100%) wzrastają od
N’ do +, co ilustruje rys. 6.
0%
15%
30%
45%
60%75%90%
0
25
50
75
100
125
150
175
200
0
0,6
1,2
1,8
2,4 3
3,6
4,2
4,8
5,4 6
6,6
7,2
7,8
8,4 9
9,6
10
,2
10
,8
11
,4
12
12
,6
13
,2
13
,8
14
,4
15
15
,6
16
,2
16
,8
17
,4
18
18
,6
R
N(R,N')
N'
Wykres funkcji N(R,N')
0-25 25-50 50-75 75-100 100-125 125-150 150-175 175-200
Rys. 5. Wykres pozornego zawyżonego narzutu N(R,N’) jako funkcji rabatu R oraz
rzeczywistego narzutu N’ ustalonego na pożądanym poziomie

39
0%
10000%
20000%
30000%
40000%
50000%
60000%
0% 10% 20% 30% 40% 50% 60% 70% 80% 90%R
Wykres N(R, N'=500%)
0%
200%
400%
600%
800%
1000%
1200%
1400%
1600%
1800%
2000%
0% 10% 20% 30% 40% 50% 60% 70%
R
Wykres N(R, N'=500%)
Rys. 6. Wykres pozornego zawyżonego narzutu N(R,N’) jako funkcji rabatu R oraz
rzeczywistego narzutu ustalonego na pożądanym poziomie N’= 500% widoczny
w przedziałach a) <0%; 99%> i b) <0%; 70%>
Zauważmy, że dla osiągnięcia rzeczywistego narzutu w wysokości N’=500% (tj.
marży ok. M’=86%) niezbędnego do pokrycia kosztów stałych i zmiennych oraz dla
uzyskania dodatniego przychodu, to aby można było zastosować rabat w wysokości
odpowiednio 20%, 30%, 40%, 50% lub 70% należy zastosować pozorny narzut w wysokości
odpowiednio 650%, 757%, 900%, 1100% lub 1900%. Oznacza to, że towar osiągnie cenę od
której jest liczony rabat w wysokości odpowiednio 7,5; 8,57; 10; 12 lub 20 krotności jego
ceny zakupu.
Zaś dla osiągnięcia rzeczywistego narzutu jedynie w wysokości N’=50% (tj. marży
M’=30%) niezbędnego do pokrycia kosztów całkowitych oraz dla uzyskania dodatniego
przychodu, to aby można zastosować rabat w wysokości 70% (lub 50%) należy zastosować
pozorny narzut w wysokości 400% (lub odpowiednio 200%). Oznacza to, że towar osiągnie
cenę od której jest liczony rabat w wysokości 5 krotności (lub odpowiednio 3 krotności) jego
ceny zakupu.
Przykład 5. Twierdzi się, że Polska znajduje się pośrodku skali obciążeń podatkowych
w Europie. W 2014 r. pierwszy Dzień Wolności Podatkowej w Polsce przypadał na 14
czerwca. Tzn. od tego dnia już nie pracujemy na podatki, a na siebie. Obliczając Dzień
Wolności Podatkowej porównuje się, jaki udział w PKB (dochodzie naszego kraju) mają
wydatki publiczne, takie jak między innymi budżet państwa, samorządów czy rządowe
fundusze celowe. Oznacza to, że 165 dni spośród 365 dni, czyli 45% dochodu rocznego
pochłaniają podatki [15]. Zatem w kraju o średnim 45% obciążeniu podatkowym (czyli
podatkowej marży M’ w wysokości 45%, tj. podatkowego narzutu N’ = 83%) jeżeli istnieje
50% rabat (odpowiednio 70% rabat) na pewien towar, to już ta sytuacja oznacza, że do tego
uprzednio zakupionego towaru sprzedawca musiał doliczyć 265% narzutu (czyli 73% marży)
(lub odpowiednio 508% narzutu, czyli 84% marży). Oznacza to, że pomimo, że towary takie
przed przeceną kosztowały tylko od 3,65 do ponad 6 razy drożej niż je zakupiono, to z chwilą
„wietrzenia magazynów” poprzez 50% i 70% rabaty przyniosą straty, gdyż zabraknie od nich
przychodu na koszty całkowite nie licząc już na dochód właściciela firmy handlowej.
Przykład 6. W dyskusji internetowej nt. Marża - jak policzyć cenę dla klienta na stronie [10]
ktoś, na bazie swych doświadczeń na rynku kwiatów wskazuje osobie otwierającej
kwiaciarnie cenę sprzedaży kwiatów:
Mała miejscowość: kwiat cięty - cena zakupu razy 2-3, sztuczne razy 3-4.
Miasto: kwiat cięty - cena zakupu razy 3, sztuczne razy 4-5.
a) b)

40
Wszelkie dodatki cięte czy sztuczne cena min. razy 2.
Z poprzednich wyliczeń widać, że bez drastycznych zmiany cen w tym przypadku 50% i 70%
rabaty nie pokryją straty właściciela kwiaciarni nie działającego w szarej strefie
a podlegającego nie jak obecnie 8%, lecz najwyższej 23% stawce VAT.
7. Wnioski
1. Konieczność upłynniania nietrafnie zgromadzonego w sklepie towaru zmusza
handlowców do rabatów oraz do zawyżania cen.
2. Zwiększanie obciążeń podatkowych na nietrwałych artykułach spożywczych
codziennego użytku by nie przyniosło strat handlowcom upłynniających je poprzez
system rabatów powoduje znaczny a niekiedy drastyczny wzrost cen tych artykułów.
3. Zmniejszenie obciążeń liczonych w postaci „marży podatkowej” o 1% (czyli
podatkowego narzutu o 4%) pozwala obecnie na bezpośrednie nawet ponad 8% -
13% obniżenie cen niektórych artykułów tradycyjnie sprzedawanych okresowo z 50%
- 70% rabatem.
4. System rabatów w trakcie „wietrzenia magazynów” wytwarza i utwierdza specyficzne
rozwarstwienie społeczne tj. istnienie dwóch grup odbiorców towaru: tych którzy mają
do nich dostęp codziennie bez względu na cenę, bo sami swe usługi obciążają
wielokrotnym narzutem oraz tych, którzy pomimo, że niekiedy dostarczają wiele usług
i towarów, to tanio i dlatego dobra luksusowe a nawet codzienne są dla nich
niedostępne bez rabatu.
5. Dokładne przewidzenie zapotrzebowania potencjalnych klientów pozwala na znaczne
obniżki cen. Dlatego zakupy z wyprzedzeniem w postaci zapisów na listę i grupowe
terminowe kontrakty pozwalają na znaczne obniżki cen, gdyż m.in. zmniejszają straty
na nieupłynnionych towarach.

41
Bibliografia
[1] Markiewicz J., Znaczenie i rola pojęcia „marży handlowej” na tle art. 15 ust. 1 pkt 4
ustawy o zwalczaniu nieuczciwej konkurencji, 2014, Przegląd Prawniczy Ekonomiczny
i Społeczny, 3, 127-139.
[2] Sobczyk G., Celoch A., Marketing współczesnej organizacji. red. Filar D. cz. 1
Współczesny marketing. Skuteczna komunikacja i promocja, 2013, UMCS, Lublin.
[3] Pawłowska A., Kompetencja „orientacja na klienta” u osób zakładających działalność
gospodarczą oraz jej znaczenie dla procesu inwestowania w rozwój pracowników.
Problemy Zarządzania t. 2 Przedsiębiorczość w XXI wieku: oblicza i wyzwania, 2015,
vol. 13, nr 1 (51), 170-182.
[4] Sroczyński J., Rabat retroaktywny a tzw. opłata półkowa: potrzeba racjonalizacji,
„Internetowy Kwartalnik Antymonopolowy i Regulacyjny”, 2013, nr 1(2), s. 91.
[5] Stasiuk K., Maison D., Psychologia Konsumenta, 2014, PWN.
[6] Strzyżewska E., Wielgosik I., Organizacja i techniki sprzedaży. Prowadzenie
sprzedaży, tom 2, 2015, Wydawnictwo eMPi2, Poznań.
[7] Tajeddini, K., Elg, K., Trueman, M., Efficiency and Effectiveness of Small Retailers:
The Role of Customer and Entrepreneurial Orientation. Journal of Retailing and
Consumer Services, 2013, 20, 453–462.
[8] Wawrzosek J. and Ignaciuk S., Dual model for classic transportation problem as a tool
for dynamizing management in a logistics company, 2016, EconTechMod, (w recenzji).
[9] Wolski D., Wybrane zagadnienia na tle orzeczeń dotyczących opłat za przyjęcie towaru
do sprzedaży, „Internetowy Kwartalnik Antymonopolowy i Regulacyjny”, 2013, nr 1(2),
s. 32.
Netografia
[10] http://www.biznesforum.pl/marza-jak-policzyc-cene-dla-klienta-vt89478.html
[11] http://www.integracja-action.pl/ustawienie-marz-i-narzutow
[12] http://grupy-dyskusyjne.money.pl/jak;wyliczac;rabat;dla;klienta;,watek,613886.html
[13] http://www.wierszek.pl/articles.php?article_id=11647
[14] http://webshop-analytics.pl/jaka-jest-roznica-miedzy-marza-a-narzutem
[15] http://www.strefabiznesu.pomorska.pl/artykul/dzien-wolnosci-podatkowej-2014-od-14-
czerwca-juz-nie-pracujemy-na-podatki-na-siebie

42
Rozdział IV:
Propozycja procesu pozyskiwania danych rynkowych na potrzeby
realizacji badań poświęconych zastosowaniu informatyki
w gospodarce
Artur Machura
Uniwersytet Ekonomiczny w Katowicach
40-287 Katowice, ul. 1 Maja 50
e-mail: [email protected]
ABSTRACT
Badania poświęcone zastosowaniu informatyki w gospodarce, w dobie rozwoju
biznesu za jej pośrednictwem – wydają się kluczową kwestią z perspektywy przedsiębiorstw
prowadzących działalność innowacyjną. Właśnie dlatego, bowiem decyzje podejmowane
przez interesariuszy tej pracy - opierają się o fakty rynkowe. Artykuł wyjaśnia interakcję
kluczowych zagadnień w prowadzeniu działalności innowacyjnej , porządkuje te zagadnienia
i proponuje pewien proces prowadzenia prac. W rezultacie tworzenia niniejszego
opracowania powstała swego rodzaju skonkretyzowana instrukcja pracy dla badacza, oparta
o popularyzowane metodyki organizacji pracy naukowej, jak np. paradygmat badań
HEVNERA, czy też o pisaniu doktoratów i habilitacji przez Profesora Cellarego. W artykule
zaprezentowano również wykorzystanie bezpłatnych narzędzi koncernu Alphabet Inc., jak
np. Google Forms.
Słowa kluczowe: informatyka gospodarcza, działalność innowacyjna, proces prowadzenia
badań naukowych
Keywords: business Informatics, innovative activity, the process of scientific research
1. WSTĘP
Prowadzenie prac badawczych w dziedzinie informatyki gospodarczej, znajduje się pod
wpływem różnych interesariuszy. Na pewnym poziomie ogólności, można wymienić co
najmniej środowiska:
biznesowe,
naukowe.
Realizacja pracy badawczej w takim otoczeniu, spotyka się z wyzwaniami metodycznymi.
Podczas gdy przedsiębiorstwa oczekują efektów z pracy niemalże bezpośrednio, środowiska
naukowe działają w dłuższej perspektywie czasu. Rozciągając decyzje na przestrzeni, która
uwzględnia zarówno fakty historyczne, jak i te odnoszące się do przyszłości.
Wobec tego jak prowadzić prace badawcze, w których wymagania interesariuszy są tak
zróżnicowane? Odpowiedź na to pytanie ma niebagatelne znaczenie na płaszczyźnie
operacyjnej, ponieważ pracy badawczej towarzyszą konkretne zadania, gdzie jakość
komunikowania się z przedstawicielami obu środowisk jest kluczowa. W realizacji tych

43
konkretnych zadań badacz szuka chociażby źródeł finansowania prowadzonych projektów.
Gdzie można spotkać się bezpośrednio z konsekwencjami wpływu tych niekoniecznie
spójnych środowisk: nauki i biznesu?
Artykuł poszukuje pewnej ścieżki metodycznej prowadzenia prac badawczych
w dziedzinie informatyki gospodarczej, dla której następnie dostosowuje wykorzystywane
narzędzia informatyczne. Uwzględnia przy tym propagowane metody organizacji pracy
naukowej, jak paradygmat badań Hevnera [4], czy też wykład Prof. Cellarego "Czym się
różni nauka od nie-nauki?" [2].
2. ZAŁOŻENIA DZIAŁALNOŚCI INNOWACYJNEJ
Pojęcie działalności innowacyjnej, na wstępie należy zauważyć, dotyczy szerszego
aspektu zagadnień aniżeli samej innowacji. W literaturze przedmiotu można spotkać m.in.
definicję:
"Działalność innowacyjna to całokształt działań naukowych, technicznych, organizacyjnych,
finansowych i komercyjnych, które prowadzą lub mają w zamierzeniu prowadzić do
wdrażania innowacji" [1]
Opisywany problem sformułowania procesu pozyskiwania danych rynkowych, na
potrzeby badań poświęconych zastosowaniu informatyki w gospodarce, niewątpliwie
intensywnie dotyczy w/w definicji. Należy tu zwrócić uwagę na kluczowe kwestie, których
działalność innowacyjna dotyczy, a które sam proces powinien uwzględniać:
• działania naukowe,
• działania techniczne,
• działania organizacyjne (przedmiot zainteresowania niniejszego artykułu),
• działania finansowe,
• działania komercyjne,
• wdrażanie innowacji.
Wobec w/w kwestii i mnogości zadań szczegółowych z nimi powiązanych, wydaje się
wręcz koniecznym prowadzenie działalności innowacyjnej, dopiero po uporządkowaniu tego
procesu pozyskiwania danych rynkowych. Bowiem na styku wymienionych obszarów
zagadnień, rodzi się wiele dodatkowych zadań i możliwych komplikacji – nawet w obrębie
zainteresowania samego artykułu związanego z organizowaniem procesu pozyskiwania
danych, np.:
• Jak dostosować działania techniczne do działań naukowych, ale uwaga - co w
przypadku kiedy te działania naukowe ulegają zmianie, a działania techniczne nie spełniają
oczekiwań nauki?
• Współczesne koncepcje zarządzania przedsięwzięciami rynkowymi, są mocno
podporządkowane zmianom i idei ewolucji. A więc jak umiejscowić działalność naukową
pośród dynamicznych zagadnień rynkowych? Tym bardziej, że działalność naukowa w
rodzimym środowisku raczej jest skłonna do sekwencyjnego rozwoju wydarzeń (np.
publikacja artykułu to zwykle: badania -> złożenie wniosku o publikację -> formalności
dotyczące jego obsługi -> opracowanie artykułu -> recenzja -> publikacja; proces trwa zwykle

44
wiele miesięcy i tu raczej nie ma ani czasu ani reguł na zmiany merytoryczne w trakcie
samego procedowania publikacji)
• Kluczową kwestią z perspektywy całej i pełnej działalności innowacyjnej, byłoby
umiejscowienie w działalności naukowej właśnie wyników wdrażania tej innowacji.
Osiągnięcie pewnej oczekiwanej sprawności w umiejscawianiu wyników wdrażania tych
innowacji z powrotem do samego początku – działalności naukowej.
Założenia działalności innowacyjnej w/w, będą miały swoją implikację w dalszej
części artykułu. W szczególności, powinny zostać uwzględnione w procesie pozyskiwania
danych.
3. WYMAGANIA WOBEC PRACY NAUKOWEJ I INTERESARIUSZE
Podczas prowadzenia prac badawczych w informatyce gospodarczej, można
wyróżnić konkretne działania i towarzyszące temu porcje pracy. Pozwala to na przyjęcie
pewnych formalnych wytycznych, w odniesieniu do bardziej skonkretyzowanej pracy.
Na potrzeby niniejszego artykułu przyjęło następujące konkretne działania i
wynikające z tego wymagania. Poniższa tabela precyzuje te działania i wymagania im
towarzyszące.
Tabela 1 Wymagania względem pracownika naukowego realizującego projekty naukowe
Obszary działalności Interesariusze Wymagania
Realizacja pracy doktorskiej
na Uczelni Publicznej –
Uniwersytecie
Ekonomicznym
Uniwersytet Ekonomiczny 1. Dostosowanie pracy do
ustawy z dnia
27.07.2005 r. - Prawo o
szkolnictwie wyższym.
2. Dostosowanie pracy do
ustawy z dnia
14.03.2003 r. o stopniach
i tytułach naukowych.
3. Dostosowanie pracy do
rozporządzenia MNiSzW
z 30.10.2015 r.

45
Promotor główny 1. Udział w projektach
i pracach badawczych.
2. Doprecyzowanie
przedmiotu badań
i formułowanie problemu
naukowego.
3. Publikacje naukowe na
konferencjach krajowych
i międzynarodowych.
Promotor pomocniczy 1. Sprecyzowana i celowa
współpraca z biznesem.
Autorzy metodyk
towarzyszących pracy
1. Zastosowanie metod
pracy i praktyk Hevner
i in.
2. Zastosowanie metod
pracy i praktyk Cellary.
Projekt Narodowego
Centrum Nauki dla osób z
tytułem magistra –
PRELUDIUM (wspierający
prowadzenie badań przez
początkujących naukowców)
Narodowe Centrum Nauki
Poszukiwanie źródeł
finansowania dla
prowadzonych prac i udział w
konkursach (np. projekt
Preludium Narodowego
Centrum Nauki NCN).
Komitet oceniający wniosek
konkursowy
1. Dostosowywanie
realizowanych prac
naukowych do wymagań
konkursowych.
4. MODEL DZIEDZINY INFORMACYJNEJ
Możliwy szeroki zakres dziedziny informacyjnej, zostanie ograniczony do tej
wynikającej z realizowanych wcześniej, wymienionych przedsięwzięć tj.:
praca doktorska,
projekt PRELUDIUM.
Na potrzeby obu w/w przedsięwzięć naukowych zostaną sporządzone diagramy klas,
które łącznie będą wskazywały na informacje towarzyszące prowadzonej działalności
naukowej. W rezultacie, proces realizacji pracy będzie się opierał o określoną dziedzinę
informacyjną. Jednak zanim to nastąpi, należy omówić przepływ informacji i ewentualne

46
zależności pomiędzy przedsięwzięciami, jakimi są: projekt Preludium i praca doktorska.
Poniższa ilustracja diagramu 1 prezentuje klasy, asocjację skierowaną, przepływ informacji
i liczebności, z których można pokrótce wywnioskować, że efekty badań projektu Preludium
dostarczają informacji do pracy doktorskiej. Jak będzie można wywnioskować w dalszej
części artykułu, gdzie mowa o paradygmacie badań Hevnera i in., czy też wytycznych Prof.
Cellarego – zasilanie pracy doktorskiej informacjami pochodzącymi z projektów rynkowych
(możliwych do realizacji przez m.in. konkurs Preludium) jest kluczowe w realizacji pracy
doktorskiej w dziedzinie informatyki gospodarczej.
Rys. 1. Przepływ informacji pomiędzy przedsięwzięciami naukowymi
Rys. 2. Model dziedziny informacyjnej projektu Preludium
4.1. MODEL DZIEDZINY PROJEKTU PRELUDIUM
Dziedzina informacyjna projektu Preludium wyszczególnia klasy:
• Przedsięwzięcie Preludium.
• Oczekiwania pracy doktorskiej.
• Opiekuna naukowego projektu Preludium.
• Regulamin konkursowy projektu Preludium.
• Kierownika projektu Preludium.
• Wniosek konkursowy.

47
• Panele ekspertów oceniających.
4.2. MODEL DZIEDZINY PRACY DOKTORSKIEJ
Rys. 3. Model dziedziny informacyjnej pracy doktorskiej
Dziedzina informacyjna pracy doktorskiej wyszczególnia klasy:
• Projekt i dokumentację pracy naukowej.
• Przepisy realizacji pracy naukowej.
o Rozporządzenie MNISzW.
o Ustawę o stopniach i tytułach naukowych.
o Prawo o szkolnictwie Wyższym.
• Wytyczne Metodyczne.
• Publikacje Naukowe.
• Udział w projektach badawczych.
5. PROPOZYCJA PROCESU POZYSKIWANIA DANYCH
Perspektywa dziedzin informacyjnych, zobrazowanych przez diagramy na rysunkach
2 i 3, tj. projektu Preludium i pracy doktorskiej, uświadamia pod wpływem jak wielu pojęć
znajduje się proces pozyskiwania danych. Wyszczególnienie asocjacji, zależności
i właściwości pomiędzy klasami rzutuje na specyfikę konstruowanego procesu. W pracy na
pewno warto uwzględnić zarówno ewolucję samej konstrukcji pracy, jak i rosnącą dojrzałość
jej efektu, czyli procesu pozyskiwania danych, ponieważ zbyt wiele jest niewiadomych,

48
mieszczących się w poszczególnych klasach pojęć, od których zależą przedsięwzięcia
naukowych. Przykładowo:
Jakie są wyniki panelistów komitetu oceniającego dokumentację konkursową
Preludium?
Jakie są opinie recenzentów kolejnych artykułów naukowych wypracowywanych
w drodze badań empirycznych?
Jakie jest zdanie promotora pracy doktorskiej, względem jej fragmentów?
Powyżej scharakteryzowane kwestie obrazują pewne przykładowe decyzje, od
których mogą zależeć zmiany i przebieg procesu. Na pewno wskazują na wymagany zarys
wobec całokształtu – ewolucji podyktowanej wymaganiami interesariuszy (np. komisji
konkursowej, promotora). W pewnej analogii do przedsięwzięć informatycznych, które
właśnie tą ścieżką ewolucyjną są najczęściej rozwijane, proces pozyskiwania danych na
potrzeby realizacji przedsięwzięć naukowych również nie pozostanie obojętny. Przy czym
kluczowe decyzje wpływające na tą ewolucyjność pracy to:
jakie znaczenie mają przyjęte metodyki pracy w formułowanym procesie
pozyskiwania danych?
jakie ustanowić odcinki tej pracy ewolucyjnej i jakie wyznaczyć cele/ kamienie
milowe?
kto lub co będzie decydowało o rzeczywistym progresie przedsięwzięć naukowych
i osiąganiu pewnych – oczekiwanych - etapów?
Odpowiedź na w/w pytania, znajduje się w samych wymaganiach prezentowanych
w punkcie 3. Kluczowy wydaje się tu aspekt przenoszenia informacji z biznesu do nauki wg.
paradygmatu Hevnera i in., jak i samo publikowanie tych informacji w przewodzie naukowym
wg. Profesora Cellarego. Innymi słowy przyjmuje się, że na całokształt realizacji pracy będzie
miała wpływ metodyka Hevnera i in. Natomiast dla kwestii publikacji naukowych i tzw.
komunikacji dla dyfuzji wiedzy w społeczeństwie badaczy będą miały zastosowanie wytyczne
Prof. Cellarego.
5.1. PODSTAWY ORGANIZOWANIA PRZEDSIĘWZIĘĆ NAUKOWYCH W OPARCIU
O METODYKĘ SCRUM
Mnogość rzeczywistych scenariuszy rozwoju wydarzeń przy realizacji pracy
naukowej, jaką jest przewód doktorski, czy też udział w konkursie Preludium – uzmysławia
o potrzebie zarządzania zmianami, przy stosunkowo niewielkim nakładzie formalnym
dotyczącym obsługi tych zmian. Metodyka SCRUM – powszechna przy realizacji
dynamicznych przedsięwzięć informatycznych, którą prezentuje poniższa ilustracja 4 –
w zarysie wydaje się odpowiednim sposobem na osiąganie celów przedsięwzięć naukowych.
Bowiem na bazie tzw. product backloga (czyli pewnej zarządzanej listy wymagań wobec
przedsięwzięcia naukowego) można ad-hoc formułować tzw. Sprinty (czyli celowe kamienie
milowe, których uzasadnienie znajduje się w samych wymaganiach). Ostatecznie realizacja
kolejnych sprintów doprowadza do inkrementacji przedsięwzięcia naukowego i możliwego
zwrotu pracy w postaci np. przygotowanego projektu Preludium, pracy doktorskiej, czy też
mniejszych prac takich jak np. publikacja na konferencję krajową. Warto zauważyć, że sama
organizacja pracy umożliwia powoływanie zespołu/ teamu adekwatnego do potrzeb Sprintu,

49
którego uzasadnienie de facto znajduje się w paradygmacie badań Hevnera i in., czy też
modelu Prof. Cellarego.
Rys. 4. Model referencyjny realizacji przedsięwzięć naukowych na bazie metodyki SCRUM
Oczywiście zaprezentowany powyżej Framework wymaga urealnienia i bliższego
odniesienia do paradygmatu badań Hevnera, dlatego w kolejnym punkcie wylistowano
kluczowe etapy tej pracy, które w nomenklaturze SCRUM mogłyby oznaczać kolejne
inkrementacje.
5.2. PARADYGMAT BADAŃ WG. HEVNERA I IN.
Omówienie paradygmatu prowadzenia badań Hevnera i in., nawet kiedy
zainteresowanie artykułu i procesu odnosi się jedynie do pozyskiwania danych, wymaga
wyjaśnienia na wstępie ogólnej koncepcji tej metody. Mianowice omawiany paradygmat
badań dotyczący systemów informatycznych jest zorientowany na rozwiązywanie problemów
konstrukcyjnych i znany jest jako Design Science Research (DSR), czyli paradygmat badań
w nauce tworzenia artefaktów [HeCh10, HMPR04].
Warto tu podkreślić, że omawiany paradygmat znajduje uznanie m.in. w tych
badaniach naukowych, gdzie ma miejsce tworzenie artefaktów użytecznych dla
rozwiązywania zidentyfikowanych problemów organizacji gospodarczych. Co w odniesieniu
do zamierzeń zastosowania proponowanego procesu, mianowicie pozyskiwania danych
rynkowych na potrzeby zastosowania systemów informatycznych, wydaje się kluczową
właściwością.

50
Hevner i Chatterjee zaproponowali pewną sekwencję kroków badacza, która pozwala
na realizację działań według paradygmatu DSR. Poniższa Tabela 1 Etapy pracy Hevner,
Chatterje, zawiera niezbędny opis, informując jednocześnie o Sprintach, w których ta praca
zostanie zrealizowana.
Tabela 2 Etapy pracy Hevner, Chatterje w kolejnych Sprintach SCRUM
Nazwa etapu pracy wg. Hevnera Numer Sprintu
SCRUM
Identyfikacja problemu i motywacja
Definiowanie specyficznych problemów badawczych i uzasadnienie znaczenia
rozwiązania. Analiza zasobów wiedzy i analiza problemu dla pokazania
złożoności rozwiązania. Przedstawienie znaczenia rozwiązania dla badaczy
i pozostałych interesariuszy badania dla poszukiwania najlepszego rozwiązania
i dla akceptowania wyników badania [HeCh10, s. 28 i n.]
1.00
Definicja celów badania
Wnioskowanie odnośnie celu badania na podstawie definicji problemu i wiedzy
dotyczącej tego, co jest możliwe i wykonalne. Rozwiązanie może być wyrażone
opisowo lub mierzalne ilościowo i przedstawione w kategoriach rozwiązania
lepszego niż aktualnie stosowane. Zasoby wymagane dla tego etapu obejmują
wiedzę na temat stanu badań nad problemem, analizę aktualnych rozwiązań
i ocenę ich skuteczności [HeCh10, s. 28 i n.]
2.00
Rozwój projektu
Tworzenie artefaktów, czyli koncepcji, modeli, metod i przykładów wdrożeń,
nowych własności technicznych, społecznych i informacyjnych zasobów.
Artefaktem badania może być zaprojektowany przez badacza obiekt. Ten etap
wymaga ustalenia pożądanej funkcjonalności obiektu i jego architektury oraz
konstrukcji pozostałych artefaktów. Na tym etapie występuje przejście od celów
projektu do jego realizacji i zastosowanie wiedzy teoretycznej
w urzeczywistnianym rozwiązaniu [HeCh10, s. 28 i n.]
3.00
Demonstracja
Przedstawienie użycia artefaktu na wybranych przez badacza przykładach. Ten
etap wymaga zastosowania eksperymentu, symulacji, studium przypadku,
analizy dowodów lub innej odpowiedniej metody jakościowej. Konieczne zasoby
wiedzy dla realizacji tego etapu obejmują wiedzę jak zastosować artefakty
w praktyce [HeCh10, s. 28 i n.]
4.00
Ewaluacja
Obserwacja i pomiar, na ile dobrze artefakt wspomaga praktykę. Analiza
efektów zastosowania artefaktu wymaga wiedzy na temat odpowiednich metryk
i technik analizy. Ewaluacja może obejmować porównanie funkcjonalności
artefaktów, z odniesieniem do funkcjonalności najbardziej pożądanej, analizy
budżetów i kosztów, badania satysfakcji użytkowników i klientów (zarówno ludzi
5.00

51
biznes jak i, nauki), symulacji funkcjonalnej. Brane są pod uwagę miary
ilościowe funkcjonowania systemu, takie jak czas reakcji i dostępność.
Ewaluacja może obejmować każdy odpowiedni dowód empiryczny lub logiczny.
Pod koniec etapu, badacz podejmuje decyzję o powrocie do etapu konstrukcji
artefaktu dla udoskonalenia jego efektywności lub decyduje się na przejście do
następnego kroku i pozostawia kwestie doskonalenia do rozstrzygnięcia
w innych projektach. Na tym etapie, badacz musi rozważyć, ile iteracji należy
wykonać [HeCh10, s. 28 i n.]
Komunikacja dla dyfuzji wiedzy w społeczeństwie badaczy
Komunikowany jest problem badawczy, jego znaczenie i generowane artefakty,
ich użyteczność, nowość, porządek projektu badawczego, użyte metody
badawcze, efektywność działań badaczy, charakterystyka audytorium
interesariuszy projektu, publikacje naukowe, dzięki którym w ogóle możliwa jest
komunikacja naukowa [HeCh10, s. 28 i n.]
6.00
5.3. URYNKOWIONE WYTYCZNE WOBEC REALIZACJI PRACY NAUKOWEJ –
PROF. CELLARY
Profesor Wojciech Cellary w swoim ogólnodostępnym w kraju wykładzie pt. Czym się
różni nauka od nie-nauki, czyli jak napisać dobry doktorat i habilitację, propaguje na bazie
ustaw Rzeczpospolitej Polskiej praktyki towarzyszące realizacji prac naukowych. Wykład ten,
wobec przedstawionego scenariusza prowadzenia badań w oparciu o paradygmat badań
Hevnera i in., wydaje się znakomitym dopełnieniem i urynkowieniem realizacji prac
naukowych. Warto tu zauważyć, że proces pozyskiwania danych rynkowych – sam w sobie
nie stanowi badań naukowych (o czym informuje slajd 22 wykładu), w słowach.:
Zbadanie stanu gospodarki (sektora gospodarki, grupy przedsiębiorstw) nie jest
badaniem naukowym, bowiem mają one na celu opisu stanu, a nie odkrycie praw.[2]
Nie mniej jednak, wykład Prof. Cellarego informuje o lokalizacji w pracy doktorskiej
i habilitacyjnej wyników tych badań. Jako że, wyniki tych badań pozwalają na sformułowanie
problemu do rozwiązania w pracy.

52
Tabela 3 Struktura rozprawy doktorskiej i habilitacyjnej wg. Prof. W. Cellary
Struktura rozprawy doktorskiej
Część nieoryginalna
Wstęp
Stan wiedzy o dyscyplinie doktoratu/ habilitacji
Sformułowanie problemu
Krytyka dotychczasowych metod rozwiązania problemu
Część oryginalna
Koncepcja nowej metody rozwiązania problemu
Prezentacja nowej metody
Wnioski
Bibliografia
Na potrzeby celu niniejszego artykułu przyjmuje się, że proces pozyskiwania danych
na tle scharakteryzowanych metod Hevner i in. oraz Prof. W. Cellarego, będzie się opierał o
dwa kluczowe zadania tj.:
1. Identyfikacja problemu i motywacja (Hevner i in.)
2. Sformułowanie problemu (prof.W. Cellary)
5.4. PROCES POZYSKIWANIA DANYCH RYNKOWYCH
Scharakteryzowany proces pozyskiwania danych rynkowych, wg. przyjętej metodyki
SCRUM, powinien uwzględniać na wstępie listę tzw. Product Backlog, w której zawiera się
wymagania, na podstawie jakich są formułowane i zarządzane SPRINTY, do czasu
wypracowania satysfakcjonującego produktu. W tym przypadku, produktem procesu
pozyskiwania danych rynkowych jest identyfikacja i sformułowanie problemu. Kryteria jego
oceny zawierają się właśnie w początkowej liście wymagań. Znacząca ilość tych wymagań,
wskazuje na potrzeby ich skategoryzowania. Co też zostało poniżej dokonane.

53
Kategoria wymagania Nazwa i opis wymagania
Wymagania prawne
Dostosowanie pracy do ustawy z dnia
27.07.2005 r. - Prawo o szkolnictwie
wyższym.
Dostosowanie pracy do ustawy z dnia
14.03.2003 r. o stopniach i tytułach
naukowych.
Dostosowanie pracy do rozporządzenia
MNiSzW z 30.10.2015 r.
Wymagania metodyczne
Zastosowanie metod pracy i praktyk Hevner i
in.
Zastosowanie metod pracy i praktyk Cellary.
Wymaganie realizacyjne
Sprecyzowana i celowa współpraca z
biznesem.
Udział w projektach i pracach badawczych.
Doprecyzowanie przedmiotu badań i
formułowanie problemu naukowego.
Poszukiwanie źródeł finansowania dla
prowadzonych prac i udział w konkursach
(np. projekt Preludium Narodowego Centrum
Nauki NCN).
Dostosowywanie realizowanych prac
naukowych do wymagań konkursowych.
Wymagania komunikacyjne Publikacje naukowe na konferencjach
krajowych i międzynarodowych
Poniższy Sprint 1 - Identyfikacja problemu i motywacja, w oparciu o diagram
aktywności (język UML – Unified Modeling Language), demonstruje przebieg sprintu 1.00,
którego celem wg. Hevnera i in. oraz Cellarego powinna być tzw.
Identyfikacja/sformułowanie problemu i motywacja. Szerszy opis tego etapu pracy można
znaleźć np. w publikacji dostępnej w sieci pt. Seminarium dla doktorantów. Paradygmat
badań naukowych Hevnera i in. [3].

54
Rys. 5. Sprint 1 – Identyfikacja problemu i motywacja
6. NARZĘDZIA WYKORZYSTYWANE W PROJEKCIE BADAWCZYM
Na potrzeby realizowanego projektu – pozyskiwania danych rynkowych w celu
identyfikacji problemu naukowego, wykorzystano narzędzie koncernu Alphabet Inc. Google
Adwords. Poniższa lista ma na celu scharakteryzowanie funkcjonalności oferowanej przez
narzędzie. Natomiast na stronie samego producenta [5], został zamieszczony wyczerpujący
opis, który poniżej jedynie podsumowano:
• Tworzenie ankiety w Formularzach Google.
• Edycja formularza.
• Dodawanie motywu do formularza.
• Wyświetlanie określonych pytań w zależności od odpowiedzi.
• Wybór miejsca na odpowiedzi z formularza.
• Wysyłanie formularza do ankietowanych.
• Udostępnianie formularza współpracownikom.
• Korzystanie z nowych Formularzy Google.
• Tworzenie testów w Formularzach Google.

55
7. WNIOSKI
Artykuł stara się wyjść naprzeciw potrzebom metodycznym pracownika naukowego,
ponieważ ilość pomysłów na realizację pracy naukowej może być wyzwaniem samym w
sobie. A przecież nie o to chodzi w pracy naukowej, żeby „obracać” się wokół zagadnienia
jakim są metody własnego warsztatu, a szukać rozwiązań problemów np. gospodarczych,
którymi zajmuje się m.in. informatyka gospodarcza. Artykuł na bazie uznawanych metod
realizacji prac naukowych, jak: paradygmat badań Hevnera i in. oraz wytyczne Prof. W.
Cellary podsumowuje kluczowe kwestie związane z fundamentem realizacji pracy tj.
pozyskiwania danych/ identyfikacji problemu naukowego. Natomiast metodyka SCRUM
stanowi pewną oś organizacyjną dla osób zaangażowanych w takie przedsięwzięcia. Istota
tej metody to nie tylko wsparcie metodyczne same w sobie, a również zgodność z szerokim
wachlarzem narzędzi wspierających pracę zespołu opartą o SCRUM (np. ASANA) [6]
LITERATURA
[1] E-biznes a innowacje w usługach. Teoria, praktyka, przykłady. Redakcja Mikołaj
Olszański i Krzysztof Piech. Polska Agencja Rozwoju Przedsiębiorczości Warszawa
2012
[2] Czym się różni nauka od nie-nauki, czyli jak napisać dobry doktorat i habilitację.
Wojciech Cellary, Katedra Technologii Informacyjnych, Uniwersytet Ekonomiczny
w Poznaniu źródło:
https://www.google.pl/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&v
ed=0ahUKEwjNqrKq7dnPAhWJ_iwKHXu_BogQFggqMAA&url=https%3A%2F%2Fwww.
wi.zut.edu.pl%2Fcomponent%2Fdocman%2Fdoc_download%2F176-czym-sie-rozni-
nauka-od-nie-nauki-czyli-jak-napisac-dobry-doktorat-i-habilitacje&usg=AFQjCNF55HHS
WBg0kSiVTEpKIZK_ZXiABg
[3] Seminarium dla doktorantów. Paradygmat badań naukowych Hevnera i in. Małgorzata
Pańkowska, źródło: http://web.ue.katowice.pl/pank/DSRHevner.pdf, dostęp (14.10.2016)
[4] Hevner A., Chatterjee S.: Design Research in Information Systems, Integrated Series in
Information Systems, Springer Science Business Media, Heildeberg, 2010.
[5] Toutorial poświęcony wykorzystaniu funkcjonalności google forms.
https://support.google.com/docs/answer/87809?hl=pl&ref_topic=6063584 (dostęp
14.10.2016)
[6] ]Strona producenta oprogramowania, udostępniającego narzędzie wspierającej
organizację pracy zespołowej w oparciu o metodykę SCRUM https://www.asana.com/
(dostęp 14.10.2016)

56
Rozdział V:
Platforma ActGo-Gate jako innowacyjny model integracji usług
Wiesława Gryncewicz(1) Maja Leszczyńska(2)
(1) (2) Uniwersytet Ekonomiczny we Wrocławiu, ul. Komandorska 118/120, 53-345 Wrocław
Email: [email protected]; [email protected]
Streszczenie
W związku ze starzeniem się społeczeństw opracowana została koncepcja platformy
informatyczno-komunikacyjnej mającej na celu zwiększenie aktywności ludzi w wieku
emerytalnym. Jest ona dedykowana członkom lokalnych społeczności, może być
wykorzystywana do wspierania przedsiębiorczości, samorealizacji i aktywizacji na polu życia
społecznego. W artykule zaprezentowano zarówno koncepcję takiej platformy, jak i jej
strukturę informatyczną.
Summary
Due to demographic changes and growing aging of the populations an information
and communication platform has been developed. Its vision is to create an ICT based
marketplace supporting entrepreneurship, self-fulfillment and social participation for golden
workers and active retirees. The aim of the paper is to present the idea of the platform and
the architecture of a IT system supporting its operation.
Słowa kluczowe: e-usługi, integracja, platform informatyczna, ActGo-Gate
Key words: e-services, integration, IT platform, ActGo-Gate
1. Wstęp
Uniwersytet Ekonomiczny we Wrocławiu jest jednym z ośmiu partnerów
międzynarodowego konsorcjum, które otrzymało grant na finansowanie projektu w ramach
szóstego międzynarodowego konkursu: Programu Wspólnego Ambient Assisted Living
(AAL). Program Wspólny AAL to inicjatywa badawczo-rozwojowa powołana przez 20 państw
członkowskich UE oraz trzy państwa stowarzyszone (Izrael, Norwegia, Szwajcaria). Celem
ogólnym programu jest poprawa jakości życia ludzi starszych i wzmocnienie bazy
przemysłowej w Europie przez wykorzystywanie technologii informacyjno–komunikacyjnych1.
W ramach programu AAL Uniwersytet Ekonomiczny we Wrocławiu uczestniczy
w realizacji projektu „Active Retiree and Golden Workers Gate” (ActGo-Gate), czyli „Bramy
do aktywności w wieku dojrzałym”. Celem tego projektu jest stworzenie platformy
informatycznej służącej wymianie usług w ramach lokalnych społeczności. Umożliwi ona nie
1 Oesterle H., Osl P., Sassen E.: A Guideline for the Design of Collaborative Business Models in the Field of Ambient Assisted
Living, [w] Deutscher AAL-Kongress mit Ausstellung, 2008

57
tylko wyszukiwanie, rezerwowanie i rozliczanie usług, ale również wzajemne oferowanie
usług (komercyjnie lub w ramach wolontariatu) przez sąsiadujących ze sobą mieszkańców.
Dzięki zastosowaniu platformy zwiększy się dostępność różnych usług oraz wzrośnie poziom
aktywności seniorów.
Realizacja projektu została poprzedzona badaniami w krajach Europy Zachodniej.
Celem niniejszego artykułu jest zaprezentowanie koncepcji platformy ACTGo-Gate oraz
omówienie idei integracji usług w wirtualnej przestrzeni Internetu.
2. Potencjał integracji usług w sieci Internet
Współczesne rozwinięte gospodarki charakteryzują się dominującą rolą sektora
usług2. Oddziałuje on na pozostałe sektory oraz na życie pojedynczych obywateli. Sektor
usług pełni w gospodarce różnorodne funkcje, które można sprowadzić do kilku
o charakterze gospodarczym i pozagospodarczym. Do funkcji gospodarczych zalicza się3:
● funkcje obsługi procesów wytwórczych polegające na wytwarzaniu dóbr materialnych.
Funkcje te spełnia głównie transport, łączność, handel, finanse i ubezpieczenia,
● funkcje bytowe związane z zaspokajaniem różnych potrzeb bytowych ludności
poprzez rozwój takich dziedzin działalności usługowej, jak gospodarka komunalna
i mieszkaniowa, handel, transport, łączność i usługi osobiste,
● funkcje socjalne, do których zalicza się usługi związane z opieką społeczną, ochroną
zdrowia czy kulturą fizyczną,
● funkcje kulturotwórcze i oświatowe,
● funkcje administracyjno-organizatorskie,
● funkcje naukowo-badawcze wiążą się z kreowaniem postępu naukowego,
technicznego i organizatorskiego.
Usługi spełniają również wiele istotnych funkcji pozagospodarczych, związanych, np.
z obroną narodową, porządkiem publicznym, aparatem władzy czy administracją. Ich rola
w prawidłowym funkcjonowaniu kraju i społeczeństwa jest zatem niekwestionowalna.
Badania dowodzą, że w ostatnich latach sektor usług wytwarza największą część PKB oraz
zatrudnia największy odsetek pracujących4.
Warto podkreślić, iż wielość funkcji spełnianych przez usługi, ich rosnące
oddziaływanie społeczne, gospodarcze i pozagospodarcze, a także dynamiczny rozwój jest
w bardzo dużym stopniu efektem działalności innowacyjnej. Postęp naukowo-techniczny
i powstawanie nowych technologii informacyjno-komunikacyjnych odgrywają zasadniczą rolę
w przemianach tego sektora. Pojawiają się bowiem nowe sposoby świadczenia tradycyjnych
usług, a także powstają zupełnie nowe usługi, które nigdy wcześniej nie istniały.
2 Węgrzyn G.: Rola sektora usług we współczesnej ekspansji gospodarczej [w:] K. Piech, E. Skrzypek (red.),
Ochrona wiedzy i innowacji, Instytut Wiedzy i Innowacji, Warszawa 2009 . 3 Flejterski S., Klóska R., Majchrzak M.: Usługi w teorii ekonomii, [w:] Współczesna ekonomika usług,
Wydawnictwo naukowe PWN, Warszawa 2005 4 Węgrzyn G.: Rola sektora usług…

58
Rys. 1. Duża ilość oferentów w Internecie prowadzi do złożonych sytuacji decyzyjnych
Źródło: Oesterle H., Osl P.: Zintegrowana platforma do zarządzania usługami – materiały
informacyjno-promocyjne, maj 2013
Coraz częściej do dystrybucji usług wykorzystywany jest Internet. Niemniej jednak
istnieje w nim bardzo duża liczba oferentów, co prowadzi do złożonych sytuacji decyzyjnych
dla konsumentów i znacząco utrudnia wyszukanie właściwego dostawcy usługi. Dla osób
starszych dodatkową barierą jest złożoność stron internetowych, na których prezentowana
jest oferta. Ponadto strony te nie są przygotowane do obsługi przez osoby starsze. Brak na
nich możliwości powiększenia tekstu czy głosowego przewodnika ułatwiającego nawigację.
Trudno również sprawdzić wiarygodność dostawcy. Wielu seniorów potrzebuje również
przeszkolenia lub wsparcia przy pierwszym zamawianiu usługi za pośrednictwem Internetu,
aby przełamać barierę strachu związanego z wykorzystaniem nowoczesnych rozwiązań IT,
braku zaufania wobec dostawcy czy zwykłej niewiedzy. Kolejną barierą popularyzacji e-usług
wśród seniorów jest pozostawienie procesu negocjacji lub zamawiania po stronie klienta, co
z powodu na jego częste skomplikowanie zniechęca klientów do skorzystania z oferty.
Ponadto bezpośrednie zamawianie usługi na stronie danego dostawcy wiążą klienta tylko
z nim.
W kontekście powyższych obserwacji powstał projekt pozwalający na zwiększenie
dostępności do usług wśród członków lokalnych społeczności. Celem projektu jest:
zaprojektowanie i wykonanie uniwersalnej platformy technologicznej ułatwiającej osobom
starszym odnalezienie i wygodne zamawianie usług zapewniających im niezależne życie
w obrębie ich własnych domów. Opracowywana na potrzeby projektu jest platforma
informatyczna, która za pośrednictwem sieci Internet, umożliwi agregację usługodawców
pokrywających jak najszersze spektrum potrzeb (patrz rys. 2). Platforma oferuje jednolity,
dostosowany do potrzeb osób starszych interfejs. Projekt jest realizowany przy współudziale
przedstawicieli lokalnych społeczności w Szwajcarii, w Niemczech i w Polsce. Dzięki temu na
bieżąco będą monitorowane potrzeby i oczekiwania zarówno odnośnie oferowanych usług,
jak i obsługi platformy informatycznej oraz specyfiki społeczności seniorów
w poszczególnych krajach.
Konsumenci Usługodawca

59
Rys. 2. Platforma ActGo-Gate jako integrator usług dla seniorów
Źródło: Oesterle H., Osl P.: Zintegrowana platforma do zarządzania usługami – materiały
informacyjno-promocyjne, maj 2013
3. Przesłanki rozwoju platformy w Polsce
Platforma ActGoGate jest dedykowana osobom 50+. Rozpatrując w tym kontekście
potencjał rynku polskiego, należy zauważyć dwie istotne dla jej rozwoju w naszym kraju
przesłanki.
Pierwsza z nich związana jest z faktem starzenia się polskiego społeczeństwa, co
w praktyce oznacza naturalne wykształcenie się grupy potencjalnych końcowych
użytkowników platformy. Jak pokazują szacunki OECD, liczba osób powyżej 65 roku życia
wzrośnie w Polsce w latach 2010 – 2030 do 40% populacji5. Osoby należące do tej populacji
utworzą nową grupa odbiorców, z bardzo szczególnym profilem konsumenckim. Wiele osób
50+ będzie osobami samotnymi, nie w pełni sprawnymi fizycznie, wymagającymi rehabilitacji
i aktywizacji w celu zachowania jak najdłużej sprawności psychofizycznej. Jednocześnie
dane przedstawione przez WHO pokazują, że konsumenci z tej grupy będą chcieli być
samodzielni oraz żyć niezależnie, poza szpitalami i placówkami opiekuńczymi. Oczekują
również usług wysokiej jakości i dostępu bezpiecznych technologii. Będzie to miało wpływ na
rynek usług w naszym kraju, zwłaszcza tych z grupy usług medycznych. Szacuje się
bowiem, że osoby powyżej 65 roku życia wymagają czterokrotnie więcej badań i konsultacji
lekarskich, niż osoby młode i w średnim wieku.
Druga przesłanka związana jest ze wskaźnikiem rozwoju społecznego HDI (Human
Development Index). W przypadku Polski jego wartość jednoznacznie wskazuje, że
5 OECD Labour Force and Demographic Database, 2010.

60
znajdujemy się w grupie krajów świata o wysokim rozwoju warunków życia6.
W rzeczywistości przekłada się to na nieustanne dążenie do osiągania wysokiego poziomu
jakości życia społeczeństwa, poprzez wysoki konsumpcjonizm usług i produktów zaliczanych
do komponentów zapewniających utrzymanie wysokiego standardu i zdrowego trybu życia.
Idea platformy ActGo-Gate dedykowanej do dystrybucji usług kierowanych do grupy 50+
oraz ich szeroko rozumianej aktywizacji zawodowej i społecznej, wpisuje się w tak
scharakteryzowany trend rozwojowy społeczeństwa polskiego i jest odpowiedzią na jego
potrzeby.
Jak podkreślają Autorzy Raportu Otwarcia Koalicji „Dojrz@łość w sieci”: „e-integracja
generacji 50+ jest dziś ważnym wyzwaniem dla naszego kraju, zwłaszcza gdy
w perspektywie najbliższych lat i postępującego procesu starzenia społeczeństwa, pokolenie
50+ będzie stanowić coraz liczniejszą grupę społeczną. Stąd niezwykle istotne jest
budowanie świadomości cyfrowej osób w wieku 50+ oraz upowszechnianie wśród nich
korzystania z Internetu.”7
Dostarczenie na rynek zaawansowanej platformy integrującej z jednej strony
dostawców usług dedykowanych grupie 50+ oraz pracodawców chcących zlecić jej
przedstawicielom pracę w niepełnym wymiarze czasu pracy na zasadach komercyjnych bądź
wolontariatu, z drugiej strony odbiorców tych usług/zleceń, czyli osoby w wieku 50+, stanowi
kompleksową odpowiedź na potrzeby wskazanej grupy docelowej. Ponadto zapewnia
szeroko rozumianą środowiskową integrację tej grupy oraz pozwala budować kapitał
zaufania do dostawców usług oraz pracodawców. Wprowadzenie do modelu platformy
integratora, który służy pomocom osobom starszym zarówno w zakresie negocjacji cen,
rozliczeń, jak i weryfikacji dostawców usług i pracodawców dodatkowo rozwiązuje problem
nieufności osób starszych wobec nieznanych im usługodawców i eliminuje problem
nieuczciwych użytkowników. Ponadto umożliwienie kontaktu telefonicznego z integratorem,
który dla osób 50+ jest bardziej naturalny niż korzystanie z Internetu, pozwala budować
zaufanie do idei ActGo-Gate oraz wspomagać i szkolić użytkowników końcowych, kiedy tego
potrzebują. Dodatkowo platforma umożliwia zainteresowanym użytkownikom końcowym
komunikowanie się (chaty, blogi, wideo, telefony) między sobą i wymianę opinii na temat
usług/zleceń w celu zniwelowania wewnętrznie odczuwanego niepokoju, strachu, obawy
przed nowym, nieznanym. Działanie to ma również na celu zwalczenie barier pomiędzy
poszczególnymi osobami w zdefiniowanych grupach społecznych.
4. Idea platformy ActGo-Gate
Oprócz wymienionych w punkcie 2 zadań, charakteryzowana platforma ma również
za zadanie aktywizować seniorów. Realizacja tak sformułowanych zadań i celów działania
platformy ActGo-Gate przekłada się na strukturę jej użytkowników. W jej ramach funkcjonują
trzy ich grupy (patrz rys. 3). Pierwszą z nich stanowią użytkownicy końcowi (konsumenci),
czyli osoby starsze oferujące na platformie swoją pracę na potrzeby wymiany barterowej
(banki czasu, wolontariat) lub komercyjnej (praca na zlecenie lub w niepełnym wymiarze
6 Podsumowanie Krajowego Raportu o Rozwoju Społecznym - Polska 2012. Rozwój
regionalny i lokalny. Biuro Projektowe UNDP w Polsce, Warszawa 2012,
http://www.mir.gov.pl/aktualnosci/polityka_rozwoju/Documents/
raport_podsumowanie_undp_2012_www.pdf;
http://hdr.undp.org/en/media/HDR_2011_EN_Tables.pdf, [2013-03-20] 7 http://www.dojrzaloscwsieci.pl/aktualnosci-wiecej/items/polacy-50-cyfrowo-wykluczeni.html,
[2013-03-20]

61
czasu pracy). Drugą grupę stanowią dostawcy usług (usługodawcy) oraz pracodawcy, którzy
za pośrednictwem platformy oferują możliwość przyjęcia do pracy na zasadach wolontariatu
lub komercyjnych. Z kolei do trzeciej grupy użytkowników zaliczyć należy integratora, który
jak wskazuje jego nazwa ma za zadanie integrować użytkowników końcowych z dostawcami
usługi i pracodawcami. Pełni on rolę pośrednika, który przyjmuje na siebie zadanie
wspierania osób starszych w użytkowaniu platformy (wsparcie techniczne, bieżąca
telefoniczna pomoc) oraz ich wstępnego przeszkolenia w zakresie jej użytkowania. Integrator
negocjuje również ceny pracy/usług oraz dokonuje ich rozliczenia w ramach całej
społeczności użytkowników.
Koncepcja platformy opiera się na modelu integracji usługodawców i usługobiorców
za pośrednictwem rozwiązania informatycznego, przy udziale instytucji pośredniczącej, która
koordynuje komunikację między zainteresowanymi stronami oraz zabezpieczającej
realizowane transakcje od strony organizacyjnej i finansowej.
Strukturę funkcjonalną systemu informatycznego stanowią trzy podstawowe moduły8:
● Moduł usług nieformalnych dla lokalnych społeczności (ang. Serve the Community
Module), który umożliwi aktywizację społeczności lokalnej poprzez zaoferowanie
i wymianę nieformalnych usług wsparcia innym członkom społeczności. Chodzi tu o
banki czasu lub system e-bankingu dla alternatywnych sposobów płatności
polegających na wzajemnej wymianie wsparcia („barter usług” – ang. „lokal exchange
trading system).
● Moduł elastycznego zatrudniania (ang. Flexible Occupation Module), skupiający
lokalnych usługodawców oraz dojrzałych pracowników i aktywnych emerytów, którzy
chcą zaoferować odpłatnie swoje usługi dla członków społeczności lokalnej lub
podjąć pracę w niepełnym wymiarze.
● Moduł uczestnictwa w organizacjach społecznych (ang. Get Involved with
Organizations Module), skupiający członków społeczności lokalnej wokół projektów
społecznych i aktywizujący ich w tym zakresie na zasadzie wolontariatu.
8 Leimeister J. M.: Idea Pitch EU Call. AAL Joint Programme Call 6. 2012

62
Rys. 3. Grupy użytkowników platformy ActGo-Gate
Źródło: Leimeister J. M.: Idea Pitch EU Call. AAL Joint Programme Call 6. 2012
Oprócz wymienionych modułów zostanie stworzony i zaimplementowany mobilny
interfejs użytkownika końcowego oraz narzędzia wspierające usługodawców.
5. Architektura rozwiązania informatycznego
Architektura informatyczna platformy ActGo-Gate obejmuje cztery zasadnicze części
(rys. 4):
rdzeń platformy (ang. core platform)
mobilny klient użytkownika końcowego (ang. mobile end user client)
mobilny klient dostawców usług i pracodawców (ang. mobile clinet for service
provides and employers)
portal internetowy.
Zostaną one szczegółowo scharakteryzowane poniżej.
Rdzeń platformy jest obsługiwany przez integratora i zawiera elementy pozwalające
na oferowanie i wymianę usług/pracy pomiędzy użytkownikami platformy oraz ich rozliczenie.
Rozliczenie usług jest możliwe dzięki integracji rdzenia platformy z systemem klasy ERP
działającym w standardzie software-as-a-service (SaaS). W ramach rdzenia platformy
realizowane są funkcjonalności związane z zarządzaniem użytkownikami, uprawnieniami
i logowaniem. Rola ta jest realizowana przez brokera komunikacji (ang. communication
broker). Rdzeń platformy obejmuje również funkcjonalność zarządzania usługami
oferowanymi na platformie (ang. service management platform), w ramach której dostępne
są:
katalog usług,
kalendarz (koordynacja spotkań),
protokoły realizacji usług/prac, za pomoc których potwierdza się ich realizację,
potwierdzenie może być jednostronne (tylko odbiorca) lub dwustronne (odbiorca
i dostawca),
fakturowanie klientów.
Konsument Usługodawca Integrator
Konsultacje/Ustalanie potrzeb
Zarządzanie siecią powiązań
Pośrednictwo w realizacji usług
Zapewnienie jakości

63
Mobilny klient użytkownika końcowego
Przeglądarka katalogu usług/zleceń komercyjnych i na zasadach wolontariatu
Kalendarz
Potwierdzanie usług za pomocą NFC
Oferowanie/akceptowanie usług nieformalnych
Oferowanie zleceń płatnych
Oferty udziału w projektach socjalnych (wolontariat)
Moduł usług nieformalnych dla
lokalnych
społeczności Dodawanie usług
nieformalnych do katalogu usług/zleceń
Powiadamianie o ofertach
Wsparcie rozliczania za pomocą alternatywnych walut
Moduł elastycznego zatrudniania
Wsparcie kadr-płac (HR), w tym:
oferty pracy rekrutacja umowy wypłata wynagrodzeń
Moduł uczestnictwa w organizacjach
społecznych Zarządzanie
projektami, w tym: umawianie i
koordynacja spotkań (kalendarz)
katalog ofert wolontariatu
powiadamianie o nowych ofertach
ActGo-Gate
Portal internetowy
RDZEŃ PLATFORMY - ZARZĄDZANIE USŁUGAMI
katalog usług, kalendarz (koordynacja spotkań), protokoły realizacji usług/prac, za pomoc których potwierdza się ich realizację,
potwierdzenie może być jednostronne (tylko odbiorca) lub dwustronne (odbiorca i dostawca)
fakturowanie klientów.
BROKER KOMUNIKACJI
Zarządzanie użytkownikami Zarządzanie logowaniem
Mobilny klient dostawcy usług/
pracodawcy Kalendarz Potwierdzanie
realizacji usług/zleceń
Potwierdzanie usług za pomocą NFC
Dokumentowanie realizacji usług/zleceń
Wsparcie kadr-plac (HR)
ERPERP
WEB SERVICESWEB SERVICES
SOAP
UŻYTKOWNIK KOŃCOWY
INTEGRATORDOSTAWCA USŁUG/
PRACODAWCA
Rys. 4. Model platformy ActGo-Gate
Źródło: opracowanie własne
Niemniej jednak zasadniczą część rdzenia platformy stanowią trzy opisane wcześniej
moduły:
moduł usług nieformalnych dla lokalnych społeczności (ang. Serve the Community
Module), oferujący wsparcie informatyczne dla banków czasu, w tym funkcjonalności
pozwalające rozliczać jego użytkowników za pomocą tzw. alternatywnych walut tj.
jednostek czasu spędzony na realizacji tego typu usług,
moduł elastycznego zatrudniania (ang. Flexible Occupation Module), w którym można
oferować usługi profesjonalne, na zasadach komercyjnych,
moduł uczestnictwa w organizacjach społecznych (ang. Get Involved with
Organizations Module), w którym można oferować usługi na zasadach wolontariatu.
Podkreślić należy, że konstrukcja architektoniczna rdzenia platformy (broker
komunikacji) pozwala oferować usługi/pracę za pomocą jednolitego dla wszystkich
użytkowników interfejsu. Ponadto z perspektywy użytkownika profesjonalne i nieformalne
usługi są widoczne jako jedno zintegrowane, jednolite portfolio.
Mobilny klient użytkownika końcowego jest dostępny z poziomu takich urządzeń
jak tablety czy smartphony. Zapewnia on łatwy i szybki dostęp osobom starszym do
funkcjonalności platformy ActGo-Gate i jej poszczególnych modułów. Interfejs oferowany
w ramach tego komponentu platformy będzie ergonomiczny tj. dostosowany do potrzeb
i sposobu percepcji osób starszych oraz będzie dawał szerokie możliwości personalizacji,
a więc dostosowania do indywidualnych preferencji. W celu uczynienia komponentu
mobilnego klienta jak najbardziej atrakcyjnym oraz przyjaznym dla użytkowników końcowych,

64
zaimplementowane w nim zostaną innowacyjne elementy interaktywne, takie jak: technologia
NFC (ang. Near Field Communication). Zostanie ona wykorzystana do dokumentowania,
potwierdzania i autoryzacji czynności użytkownika końcowego realizowanych na platformie
ActGo-Gate np. poprzez identyfikację linii papilarnych.
Mobilny klient dostawców usług i pracodawców będzie dedykowany szerokiemu
spektrum usług oferowanych przez różnych dostawców i pracodawców. Komponent będzie
miał za zadanie wspierać ich w realizacji takich zadań jak: umawianie, planowanie
i koordynacja spotkań, potwierdzanie wykonania usług, raportowanie, szeroko rozumiana
obsługa HR (oferty pracy, rekrutacja, umowy, wypłata wynagrodzeń).
Portal internetowy integruje wymienione wyżej komponenty platform ActGo-Gate
w jeden punkt kontaktu dla wszystkich grup użytkowników. Determinuje on wygląd
interfejsów mobilnych klientów dedykowanych dla użytkowników końcowych oraz dostawców
usług i pracodawców. W ramach portalu realizowana jest synchronizacja aktywności
poszczególnych użytkowników i transakcji realizowanych w ramach wszystkich
komponentów platformy. Za pomocą portalu następuje również integracja z będącymi już
w użyciu systemami dostawców usług oraz pracodawców.
Największym wyzwaniem architektonicznym platformy ActGo-Gate jest zapewnienie
jej elastyczności rozumianej zarówno jako: możliwość dodawania nowych funkcjonalności
oraz integrowania z systemami zewnętrznymi dostawców usługi i pracodawców. Będzie to
możliwe dzięki zapewnieniu modułowej budowy platformy oraz zastosowaniu technologii
Web services.
6. Podsumowanie i przyszłe kierunki badawcze
Nowe formy dystrybucji usług mogą w znaczący sposób zmienić jakość życia osób
starszych poprzez odciążenie ich od codziennych obowiązków oraz poprzez aktywizację
społeczną, dzięki pomocy w korzystaniu z szerokiej gamy usług społeczno-kulturalnych,
a także umożliwieniu im świadczenia usług innym.
Model biznesowy platformy ActGo-Gate zakłada, iż usługi będą oferowane przez
lokalnych usługodawców dla lokalnej społeczności. Daje to możliwość sprawdzenia
oferentów, szybkiego reagowania na potrzeby rynku i dopasowania oferty, a także
zwiększenia zaufania do systemu wśród potencjalnych klientów.
Taka koncepcja wymaga przeprowadzenia badań dotyczących narodowych
uwarunkowań rynkowych, uregulowań prawnych i socjalnych oraz szczegółowej
charakterystyki grup potencjalnych użytkowników platformy, zarówno po stronie
usługobiorców, jak i usługodawców w różnych krajach, w których realizowany jest projekt,
w tym w Polsce. Jedno z pierwszych zadań Uniwersytetu Ekonomicznego we Wrocławiu
będzie polegało na wyspecyfikowaniu szans i zagrożeń rynkowych związanych
z implementacją platformy w Polsce i dopasowaniem modelu biznesowego do realiów
krajowych. Działania Uniwersytetu przełożą się na wymierne rezultaty, do których zaliczyć
należy:
opracowanie szczegółowych specyfikacji funkcjonalnych i niefunkcjonalnych dla
każdego modułu,
stworzenie modeli biznesowych praktycznego wykorzystania platformy ActGo-Gate
uwzględniających uwarunkowania lokalnych rynków europejskich, dla których
dedykowana jest platforma,
implementację programistyczną funkcjonalności poszczególnych modułów w oparciu
o model przetwarzania w chmurze i standard SaaS (ang. Software as a Service)
z uwzględnieniem niefunkcjonalnych wymagań dotyczących jakości systemu,

65
stworzenie i implementację programistyczną dodatkowych niemobilnych narzędzi
wspierających usługodawców i ich pracowników (m.in. narzędzia służące do
planowania, harmonogramowania prac oraz współdzielenia zasobów
informacyjnych),
rozwój aplikacji mobilnych, dedykowanych użytkownikom końcowym platformy
ActGo-Gate opartych na nowych formach interakcji, takich jak NFC (ang. Near Field
Communication),
analizę wersji pilotażowych systemu informatycznego wspierającego platformę
ActGo-Gate pod kątem rezultatów użytkowych oraz biznesowych,
analizę przenaszalności doświadczeń wyniesionych z wersji pilotażowych systemu
informatycznego wspierającego platformę ActGo-Gate na poziomie lokalnym,
krajowym i międzynarodowym.
W trakcie realizacji projektu oraz po jego zakończeniu prowadzone będą również
działania mające na celu upowszechnianie efektów projektu oraz zapewnienie jego
praktycznego wykorzystania.
Bibliografia
[1] Dojrzałość w sieci http://www.dojrzaloscwsieci.pl/aktualnosci-wiecej/items/polacy-50-
cyfrowo-wykluczeni.html, [2015-03-20]
[2] Flejterski S., Klóska R., Majchrzak M.: Usługi w teorii ekonomii, [w:] Współczesna
ekonomika usług, Wydawnictwo naukowe PWN, Warszawa 2005.
[3] OECD Labour Force and Demographic Database, 2010.
[4] Oesterle H., Osl P., Sassen E.: A Guideline for the Design of Collaborative Business
Models in the Field of Ambient Assisted Living, [w:] Deutscher AAL-Kongress mit
Ausstellung, 2008
[5] Oesterle H., Osl P.: Zintegrowana platforma do zarządzania usługami – materiały
informacyjno-promocyjne, maj 2013
[6] Leimeister J. M.: Idea Pitch EU Call. AAL Joint Programme Call 6. 2012
[7] Podsumowanie Krajowego Raportu o Rozwoju Społecznym - Polska 2012. Rozwój
regionalny i lokalny. Biuro Projektowe UNDP w Polsce, Warszawa 2012,
http://www.mir.gov.pl/aktualnosci/polityka_rozwoju/Documents/
raport_podsumowanie_undp_2012_www.pdf;
http://hdr.undp.org/en/media/HDR_2011_EN_Tables.pdf, [2013-03-20]
[8] Węgrzyn G.: Rola sektora usług we współczesnej ekspansji gospodarczej [w:] K.
Piech, E. Skrzypek (red.), Ochrona wiedzy i innowacji, Instytut Wiedzy i Innowacji,
Warszawa 2009 .

66
Rozdział VI:
Interfejsy użytkownika stosowane w urządzeniach dźwigowych – stan aktualny i kierunki rozwoju
Karol Miądlicki(1)
(1) Zachodniopomorski Uniwersytet Technologiczny w Szczecinie, Wydział Inżynierii Mechanicznej i Mechatroniki, Instytut Inżynierii Materiałowej, Instytut Technologii Mechanicznej, Zakład Urządzeń Mechatronicznych, al. Piastów 19, 70-310 Szczecin Karol Miądlicki: [email protected]
STRESZCZENIE
Urządzenia dźwigowe odgrywają kluczową rolę w przemyśle. Wykorzystuje się je na
całym świecie na placach budowy, statkach transportowych, w portach, magazynach
i wszędzie tam, gdzie konieczne jest przenoszenie ciężkich obiektów lub towarów. Do ich
obsługi zatrudniani są wykwalifikowani ludzie, którzy przechodzą rygorystyczne szkolenia.
Mają one na celu zwiększenie wydajności ich pracy oraz zminimalizowanie ryzyka wypadku.
Jednak pomiędzy operatorem, a urządzeniem dźwigowym istnieje jeszcze jeden
niedoceniany pośrednik, od którego również zależy wydajność pracy urządzeń dźwigowych
oraz bezpieczeństwo w miejscach, gdzie są one wykorzystywane. Jest to urządzenie
sterownicze - interfejs użytkownika, który powinien być jak najbardziej intuicyjny, efektywny
oraz ergonomiczny. Szczególnego znaczenia nabiera to w obecnych czasach, kiedy
oszczędność czasu jest bardzo istotna.
Niniejsza praca dotyczy interfejsów służących do kontrolowania urządzeń
dźwigowych. Opisuje podstawowe zagadnienia z nimi związane oraz przedstawia kierunki
ich rozwoju. W pracy scharakteryzowano typy urządzeń dźwigowych, szczególnie żurawi
załadunkowych. Dokładnie zaprezentowane zostały interfejsy użytkownika stosowane
w urządzeniach dźwigowych. Przedstawiono ich producentów, wykorzystywane rozwiązania
techniczne, a także wady i zalety. W podsumowaniu zaprezentowano stan aktualnych badań
nad interfejsami użytkownika oraz omówiono potencjale kierunki ich rozwoju.
ABSTRACT
Lifting devices have an important role in industry. They are used all over the world.
Especially in places where you need to move heavy objects or wares: construction sites,
cargo ships, cargo ports, warehouses. To control the lifting devices are employed qualified
people who have completed rigorous training. Training increases the productivity of
operators and minimize the risk of an accident. However, between the operator and the lifting
device, there is one undervalued layer which determines the performance of lifting equipment
and safety. It is a control device - the user interface, which should be the most intuitive,
efficient and ergonomic, especially nowadays when time saving is very important.
This work focuses on the interfaces between human and lifting devices, describes
basic concepts associated with them and present directions of development. The study
includes presentation of different types of lifting equipment and user interfaces, especially
loader cranes and parameters associated with them: manufacturers of control devices, used
technical solutions, as well as their advantages and disadvantages. The summary shows the

67
current state of research on user interfaces and discusses potential directions of their
development.
Słowa kluczowe: urządzenia dźwigowe, interfejsy użytkownika, pulpit sterowniczy, pilot
sterowniczy, joystick, force feedback
Keywords: lifting devices, human machine interface, control console, force feedback, joystick control
1. WSTĘP
Problem „jak podnieść ciężar” jest tak stary jak ludzkość. Ludzie od najdawniejszych
czasów próbowali go rozwiązać. Na początku pracowali razem, pchając lub podnosząc
ciężkie przedmioty. Następnie wynaleziono koło oraz zbudowano pierwsze wozy, które
ułatwiły transport ciężarów. Jednak ciągle problem pozostawał nierozwiązany. Jak
załadować ciężki blok na wóz? Jak podnieść go do góry? To pytania, na które długo szukano
odpowiedzi. Pierwsze proste rozwiązania przypominające dźwigi lub podnośniki opracowali
Egipcjanie. Wznoszenie piramid wymagało od nich dostarczenia wielu ogromnych,
kamiennych bloków na duże wysokości. Następnym krokiem były drewniane konstrukcje,
opracowane w starożytnej Grecji oraz Rzymie, przypominające dzisiejsze urządzenia
dźwigowe. Mimo rozwoju samej konstrukcji żurawi, w następnych stuleciach wykonywano je
ze stali (zdanie sugeruje, że stalowa konstrukcja żurawi względem drewnianej była
złym wyborem). Przez wiele wieków problem stanowiła siła napędowa. Dopiero na
przełomie XVIII i XIX wieku zaczęto stosować pierwsze „mechaniczne” źródło energii, jakim
był silnik parowy. Był on wykorzystywany do połowy XX wieku, kiedy to do powszechnego
użytku zaczęły wchodzić silniki spalinowe oraz elektryczne. Połącznie ich z systemami
hydraulicznymi pozwoliło uzyskać dużo większy udźwig. Obecnie, nowoczesne konstrukcje
żurawi, dźwigów oraz suwnic wykonywane są ze stali oraz jej stopów. Ich udźwig jest
kilkaset razy większy niż konstrukcji z poprzednich epok. Ponadto urządzenia dźwigowe
stały się mobilne. Napędzane są głównie przez silniki elektryczne oraz spalinowe -
połączone z systemami hydraulicznymi, wspomaganymi szeregiem czujników oraz układów
elektronicznych. Jednak największa zmiana, jaka dotknęła urządzenia dźwigowe dotyczy
sposobu sterowania nimi. Kiedyś do ich obsługi potrzeba było kilku silnych ludzi. Dzisiaj
wystarczy jeden operator, który steruje urządzeniem siedząc w wygodnej kabinie lub stojąc
przy stanowisku operatorskim, sterowanie odbywa się za pomocą samych dłoni lub palców.
2. TYPY URZĄDZEŃ DŹWIGOWYCH
1.1. Żurawie wieżowe, suwnice, żurawie portowe
Żurawie wieżowe to urządzenia zaliczane do największych maszyn roboczych. Mogą
osiągać wysokość podnoszenia do około 100m, natomiast po zaczepieniu do budynku
ograniczone są jedynie długością liny podnoszącej. Największy obecnie produkowany żuraw
to Kroll K-10000. Jego udźwig maksymalny to 360 ton. Maksymalna wysokość podnoszenia
wolnostojąco to 86 m. Żurawie budowlane mogą być stacjonarne (także budowane na
szczytowej kondygnacji budynku) lub przejezdne, na podwoziu szynowym lub gąsienicowym.
Kolumna żurawia budowlanego najczęściej ma kształt pionowej wieży o wielosekcyjnej
kratownicowej konstrukcji. Stalowe moduły są tak skonstruowane, że cała konstrukcja jest
odporna na wyginanie. Wysięgnik może być wychylny z cięgnikiem zainstalowanym na jego
końcu lub stały, poziomy, z wodzakiem (cięgnikiem) poruszającym się po nim. Żuraw

68
budowlany wyposażony jest w kilka napędów, zwykle elektrycznych, z których każdy
realizuje jeden ruch: napęd podwozia, obrót wysięgnika, wychył wysięgnika lub przesuw
wodzaka oraz podnoszenia haka, na którym wiesza się ładunek lub specjalny uchwyt.
Sposób montażu żurawia na miejscu pracy jest uzależniony od jego rodzaju. Montaż
modułowego żurawia odbywa się częściowo (jeśli jest wyposażony w klatkę wznoszącą) lub
w całości przy pomocy żurawia samojezdnego.
Następnym typem urządzenia dźwigowego jest Suwnica. Suwnica jest to dźwignica
pracująca w ruchu przerywanym, wyposażona w mechanizm podnoszenia i opuszczania:
wciągarkę lub wciągnik. Przeznaczona jest ona do przemieszczania materiałów i ludzi
w pionie oraz poziomie w przestrzeni ograniczonej długością toru jazdy, wysokością
podnoszenia i opuszczania oraz szerokością mostu. Wyróżnia się trzy podstawowe
konstrukcje suwnic: pomostowa, podwieszania oraz bramowa. Suwnica pomostowa
natorowa najczęściej jest instalowana wewnątrz hal przemysłowych. Składa się
z kratownicowego pomostu toczącego się po szynach zainstalowanych w górnej części hali,
po którym przesuwa się cięgnik. Większe suwnice wyposażone są w kabinę operatora,
natomiast małe mogą być sterowane zdalnie - przewodowo lub bezprzewodowo. Suwnica
bramowa jest najczęściej instalowana na zewnętrznych składowiskach lub pochylniach
stoczniowych. Składa się ona z pomostu zawieszonego na dwóch bocznych mostach,
wiążących dwie lub większą liczbę bram. Każda z bram wyposażona jest w podwozie typu
szynowego lub kołowego. Po pomoście przesuwa się cięgnik. Sterowanie jest podobne jak
w suwnicach pomostowych, poza dodatkowym napędem umożliwiającym ruch suwnicy.
Suwnice pomostowe podwieszane przeznaczone są do prac transportowych w warunkach
średniej intensywności pracy. Poruszają się one po torach jezdnych podwieszonych do
istniejącej konstrukcji dachowej hali. Tego typu suwnice mają zastosowanie wszędzie tam,
gdzie konieczne jest maksymalne wykorzystanie przestrzeni.
Kolejnym urządzeniem dźwigowym jest żuraw portowy. Przeznaczony jest do obsługi
wszelkiego rodzaju ładunków (kontenery, towary masowe, towary drobnicowe) oraz przy
montażu i remoncie obiektów pływających. Odznacza się on dużymi promieniami roboczymi
i dużymi możliwościami udźwigu. Odrębność nazwy żurawi portowych od stoczniowych
bierze się wyłącznie z faktu, że zwykle stocznia i port wodny stanowią różne jednostki
gospodarcze. Zarówno żurawie portowe jak i stoczniowe są zwykle montowane na
szynowym podwoziu. Budowane są także żurawie pływające. Zazwyczaj mają one
konstrukcję wypadową, gdzie cały mechanizm pochyla się w taki sposób, że przenoszony
ładunek pozostaje zawsze na tej samej wysokości; dopiero po osiągnięciu odpowiedniego
położenia opuszczany jest (lub podnoszony) za pomocą cięgnika.
1.2. Żurawie załadunkowe/przeładunkowe
Żurawie załadunkowe są maszynami o napędzie hydraulicznym. Składają się one
z kolumny obracającej się w podstawie i wysięgnika osadzonego na jej szczycie.
Instalowane są zazwyczaj na pojeździe (także przyczepie) lub mogą być zabudowane na
stałym fundamencie. Wysięgnik żurawi przeładunkowych, w większości konstrukcji złożony
jest z kilku ramion połączonych przegubami – wysięgnik przegubowy. Ramiona te mogą się
odchylać względem siebie w płaszczyźnie pionowej. Dzięki napędowi hydraulicznemu
wszystkich mechanizmów roboczych żurawia (obrót kolumny, pochylenie ramion, wysuwania
ramion, wysuwania podpór), odznacza się on niewielką masą własną oraz dużą łatwością
sterowania. Pompy hydrauliczne napędzane są najczęściej przez silnik pojazdu, na którym
żuraw jest zamontowany. Zastosowany w żurawiach przeładunkowych układ konstrukcyjny
z kolumną obrotową i wysięgnikiem przegubowym ma wiele zalet. Po zakończeniu pracy,

69
żuraw pozwala na złożenie ramion wysięgnika w taki sposób, aby podczas transportu
spełniał normy określone w warunkach technicznych dopuszczenia pojazdów do ruchu na
drogach publicznych. Ponieważ żurawie przeładunkowe montowane są zwykle z przodu lub
z tyłu pojazdu, tylko w niewielkim stopniu ograniczają jego powierzchnię ładunkową. Ponadto
w celu zapewnienia odpowiedniej stabilności, rama podstawy żurawia wyposażona jest
w podpory. Wysięgnik dzięki temu, że złożony jest z indywidualnie sterowanych ruchomych
ramion, umożliwia łatwe naprowadzenie urządzenia chwytającego nad ładunek
i pochwycenie go, a następnie bezpieczne manipulowanie nim podczas przenoszenia
oraz bezpiecznego ustawiania w określonym miejscu. Wpływa to na skrócenie i zwiększenie
wydajności pracy. W celu zapewnienia operatorowi dobrej widoczności pola pracy,
sterowanie żurawiem może być wykonywane z poziomu roboczego, z podwyższonego
stanowiska sterowniczego lub za pomocą kontrolerów bezprzewodowych. Żurawie
przeładunkowe, jako maszyny, powinny spełniać wymagania dyrektywy 98/37/WE Unii
Europejskiej dotyczącej maszyn oraz norm zharmonizowanych z tą dyrektywą. Typową
konstrukcję żurawia przeładunkowego pokazano na rysunku 1. Zaprezentowany na nim
żuraw to model HIAB 095.
Rysunek 1. Schemat budowy żurawia przeładunkowego - HIAB 095 [1]
Tabela 1 Opis budowy żurawia przeładunkowego – HIAB 095
Lp. Funkcja Lp. Funkcja
1 Ramię I (główne) wysięgnika 8 Mechanizm obrotu kolumny
żurawia
2 Ramię II (teleskopowe) wysięgnika 9 Zbiornik oleju
3 Siłownik hydrauliczny ramienia I 10 Wiązka przewodów hydraulicznych
4 Siłownik hydrauliczny ramienia II 11 Podstawa
5 Siłowniki członów teleskopowych
ramienia II 12 Dźwignie sterownicze
6 Hak 13 Podpora i wspornik
7 Kolumna żurawia 14 Stopa podpory
Na rynku żurawi załadunkowych najczęściej można spotkać maszyny produkowane
przez trzy firmy: HIAB(Cargotec), Palfinger oraz Fassi. Każda z nich oferuje, co najmniej
kilkanaście modeli żurawi załadunkowych, które są dostępne z różnymi zintegrowanymi
systemami sterowania. Systemy te, składają się z komponentów elektronicznych,
hydraulicznych oraz urządzeń sterujących. Definiują one wydajność żurawia w kontekście

70
udźwigu, precyzji, szybkości, bezpieczeństwa i komfortu. Bardziej rozbudowany system,
posiada więcej dodatkowych lub rozszerzonych funkcji, ułatwiających pracę z żurawiem. Im
bardziej zaawansowany system, tym większa wydajność żurawia.
Rysunek 2. Żurawie firm HIAB(a), Palfinger(b), Fassi(c) [2,3,4]
3. INTERFEJSY UŻYTKOWNIKA STOSOWANE W URZĄDZENIACH DŹWIGOWYCH
Jednym z czynników utrudniających sterowanie dźwigami oraz żurawiami, jest
naturalna tendencja do oscylacji ładunku. Mimo tego, że ludzie zatrudniani do obsługi
dźwigów przechodzą rygorystyczne szkolenia i mają wysokie kwalifikacje, szybkie,
bezpieczne oraz dokładne przeniesienie ładunku, bez rozkołysania go, stanowi dla nich
wyzwanie. Prowadzonych jest wiele badań nad algorytmami, które mają stłumić oscylacje
i ułatwić sterowanie. Jednak stosunkowo mało uwagi poświęcono temu, jaki wpływ na
bezpieczeństwo i efektywność pracy operatora ma zastosowany interfejs użytkownika.
Większość produkowanych urządzeń dźwigowych sterowana jest za pomocą dźwigni
połączonych bezpośrednio z systemem hydraulicznym (rys. 3.1d), bezprzewodowych lub
przewodowych kaset sterowniczych (rys. 3.1a), joysticków (rys. 3.1b) albo pulpitów
sterowniczych (rys. 3.1c). Interfejsy te odbierają polecenia operatora, jak np. wciśnięcie
przycisku. Następnie wysyłają odpowiedni sygnał do kontrolera, gdzie przetwarzany jest on
z wykorzystaniem odpowiedniego algorytmu. Rezultatem tej operacji jest sygnał sterujący,
który przekazany do silników skutkuje np. obrotem dźwigu. W tym rozdziale omówione
zostaną interfejsy wykorzystywane do sterowania urządzeniami dźwigowymi,
a w szczególności żurawiami przeładunkowymi
Rysunek 3. Interfejsy stosowane w urządzeniach dźwigowych [5-9]
3.1. Dźwignie dwukierunkowe
W mechanizmach urządzeń dźwigowych, a w szczególności żurawi przeładunkowych
najczęściej stosowany jest napęd hydrostatyczny. Odpowiada on za przekazywanie energii
do poszczególnych elementów za pośrednictwem cieczy pod ciśnieniem. Dlatego,
najbardziej podstawowym i najstarszym interfejsem sterowania, będącym częścią układu
hydraulicznego są dźwignie sterownicze.

71
W interfejsach użytkownika, w których wykorzystuje się dźwignie dwukierunkowe,
stosowane są dwa sposoby ich ułożenia:
Układ poziomy(rys. 4b)
Układ pionowy(rys. 4a)
Rysunek 4. Systemy sterowania żurawiami z pionowym i poziomym układem dźwigni [8,10]
Ponieważ dźwignie dwukierunkowe, wykorzystywane są głównie przy sterowaniu
żurawiami z poziomu roboczego, norma zaleca aby znajdowały się one po obu stronach
żurawia. Taki zabieg zapewnia operatorowi możliwość bezpośreniej oberwacji ładunku
z jednoczenesnym kontrolowaniem ramienia dźwigu, niezależnie od strony, z której ładunek
był początkowo ustawiony. W przypadku, gdyby żuraw był zamontowany na platformie
samochodowej, a dźwignie znajdowały się tylko po jednej stronie, sterowanie byłoby
utrudnione. Operator, którego zadaniem jest dokładne ustawienie przenoszonego ładunku,
musiałby odchodzić od stanowiska sterowniczego i obserwować ramię robocze lub korzystać
z pomocy innych osób, co obniżyłoby bezpieczeństwo oraz wydajność pracy. Obecnie
najczęściej stosowanym układem dźwigni jest układ poziomy, stosują go tacy producenci jak
Cargotec oraz Palfinger. Spowodowane jest to tym, że żuraw (zwłaszcza z ramieniem
wieloprzegubowym) ma dużo więcej możliwości ruchu w dół i w górę, które naturalniej
i intucyjniej dla operatora odwzorowuje poziome ułożenie dźwigni. Pionowe ustawienie
dźwigni stosowanie jest w żurawiach przeładunkowych firmy Fassi. Norma PN-EN
12999+A1:2012E definiuje, że symbole oznaczeń powinny być umieszczone w następujący
sposób:
Na gałkach dźwigni sterowniczych - wewnątrz strzałek pokazujących kierunek ruchu.
Na jednej dźwigni może znajdować się tylko jedna strzałka pokazująca kierunek
ruchu i tylko jeden symbol obrazujący wykonywany ruch (rys. 5).
Na oddzielnej tabliczce umieszczonej przy dźwigniach sterowniczych. Symbole
muszą być umieszczone bez strzałek obrazujących kierunek ruchu, jednak dla każdej
dźwigni należy zastosować dwa symbole

72
Rysunek 5. Zalecane oznaczenia systemów sterowniczych z pionowym i poziomym
układem dźwigni [11]
Dla układu poziomego zalecane jest sotosowanie schematu A po odbu stronach żurawia,
jednak dopuszczalne jest także użycie schematu A po jednej, natomiast schematu B po
drugiej stronie żurawia. Kierunek strzałki oznacza ruch dźwigni do przodu lub do góry.
3.2 Joysticki
Joysticki, czyli manipulatory drążkowe zostały pierwotnie zaprojektowane do
kontrolowania samolotów. W 1909 r. francuz Louis Blériot, jako pierwszy, zastosował
w swoich samolotach drążek sterowy. Był to kawałek rury przymocowanej ruchomo do
podłoża kabiny między nogami pilota. Odpowiednie przechylanie drążka powodowało
zmianę kierunku lotu. Jednak w miarę upływu czasu urządzenia te zostały zauważone przez
branżę rozrywkową i wykorzystane, jako kontrolery do gier. Wraz z rozwojem technologii
oraz wzrostem niezawodności konstrukcji joysticki zaczęły pojawiać się także w przemyśle.
Praktycznie zastępują one tradycyjne mechaniczne dźwignie, które wykorzystywane są
w systemach hydraulicznych. Obecnie joysticki stosowane są we wszystkich nowoczesnych
aplikacjach, w których bardzo ważna jest precyzja sterowania oraz intuicyjne poruszanie się
w przestrzeni. Są to między innymi urządzenia dźwigowe, górnicze, linie montażowe oraz
koparki. Do joysticków zaliczane są też wszelkie mechaniczne, hydrauliczne oraz
pneumatyczne dźwignie wielokierunkowe. Norma europejska PN-EN 12999+A1:2012E
podaje również zalecenia odnośnie oznakowania wielokierunkowych urządzeń
sterowniczych (joysticki) obsługiwanych zarówno z wysokiego siedziska operatorskiego, jak
i przy sterowaniu zdalnym, które zostanie omówione w dalszej części rozdziału. Na rysunku
6 pokazano rozmieszczenie i oznakowanie dwudźwigniowego systemu sterowniczego.
Rysunek 7 Przedstawia rozmieszczenie systemu sterowania złożonego z dwóch dźwigni
oraz dwóch pedałów.

73
Rysunek 6. Interfejs operatora składający się z dwóch dźwigni wielokierunkowych [11]
Rysunek 7. Interfejs operatora składający się z dwóch dźwigni i dwóch pedałów [11]
Sterowanie za pomocą Joysticków możliwe jest w kabinie EPSCAB oferowanej przez
firmę Palfinger. Została ona wyposażona w elektroniczny system sterowania hydrauliką
nazwany E-CONTROL. Bazuje on na systemie „IQAN Electronic Control System” firmy
Parker, który jest stosowany także w innych żurawiach produkowanych przez Palfinger-a.
Zadaniem takiego systemu jest zastąpienie mechanicznych i elektromechanicznych
elementów stosowanych w sterowaniu maszynami hydraulicznymi, elementami
elektronicznymi. Parker do swojego rozwiązania oferuje całą gamę zgodnych ze sobą,
certyfikowanych oraz przystosowanych do pracy w ciężkich warunkach modułów, które
ułatwiają projektowanie i przyspieszają wdrażanie gotowych rozwiązań na rynek. System
IQAN składa się między innymi z modułów diagnostycznych, modułów komunikacji
bezprzewodowej, urządzeń sterowniczych, wyświetlaczy, czujników oraz oprogramowania:
IQANStudios umożliwiającego projektowanie, symulacje układów sterowania i IQANDevelop
służącego do konfiguracji i integracji modułów. Komunikacja między modułami odbywa się
za pośrednictwem interfejsu CAN.

74
Rysunek 8. Interfejs operatora w kabinie EPSCAB firmy Palfinger [2]
Na interfejsie operatorskim, w kabinie EPSCAB znajdują się ergonomiczne konsole
operatorskie obsługiwane odpowiednio lewą i prawą ręką. Prawa konsola umożliwia
sterowanie żurawiem i funkcjami kabiny, oraz posiada wbudowany kolorowy wyświetlacz
(rys.8R). Natomiast lewa składa się z samego joysticka (rys.8L). Zastosowane joysticki to
trzyosiowe, indukcyjne modele IQAN-LM. Specjalnie zaprojektowane do maszyn
wymagających ciągłej obsługi. Ich ergonomiczny kształt wraz z podłokietnikami zapewnia
operatorowi komfort, podczas wielogodzinnej pracy. Dokładność zastosowanych czujników
wychyleń drążka dla każdej z osi wynosi dziewięć bitów. Joystick, pozwala na bardziej
intuicyjną kontrolę wysięgnika oraz zmniejsza ryzyko błędu spowodowanego wyborem złej
dźwigni. Operator nie musi korzystać z kilku dźwigni, z których każda odpowiada za inny
siłownik. Wystarczy, że skupi się na samym końcu wysięgnika, gdzie zawieszony jest
ładunek i za pomocą drążka joysticka wskaże odpowiedni kierunek ruchu. Wbudowany
w prawą konsolę wyświetlacz TFT to model IQAN-MD3. Jest to w pełni programowalna,
główna jednostka systemu IQAN. Wyświetlane na nim są informacje dotyczące całego
systemu oraz żurawia, które zostały podzielone na cztery grupy (rys. 9):
a) Główny ekran - wskaźnik obciążenia, profile operatora dźwigu, klakson,
podstawowe kontrolki i ustawienia systemu.
b) Ekran silnika - obroty na minutę, przepływ oleju, zwiększanie/zmniejszanie
obrotów, silnik start/stop.
c) Ekran oświetlenia – wizualizacja oświetlanych miejsc, włączanie/wyłącznie
oświetlenia.
d) Ekran ogrzewania - ogrzewanie silnika, ogrzewanie siedzenia, klimatyzacja.

75
Rysunek 9. Kontrolki i ustawienia na wyświetlaczu operatorskim w kabinie EPSCAB [2]
Zastosowanie wyświetlacza pozwala na zmniejszenie ilości przycisków i kontrolek,
dzięki czemu uproszczeniu ulega cały interfejs operatorski. Operator nie musi pamiętać, co
oznacza poszczególna dioda, ponieważ wszystkie kontrolki oraz ustawienia są
przedstawione za pomocą prostych i zrozumiałych symboli.
Konkurencyjna firma Cragotec ma w swojej ofercie dwie kabiny sterownicze,
w których do sterowania żurawiem używane są joysticki. Modele stary V906 oraz nowy
C912. Obie kabiny oferują zarówno konwencjonalny system sterowania wykorzystujący
dźwignie oraz pedały jak i elektroniczny. W starszej kabinie oferowany jest system
Multidrive2, natomiast w nowszej Multidrive2 lub TimberTronics. System Multidrive2 został
opracowany przez firmę Olsbergs i jest stosowany w wielu żurawiach produkowanych przez
Cargotec, szczególnie w modelach HIAB. Oferuje on możliwość sterowania żurawiami za
pomocą bezprzewodowych pulpitów sterowniczych oraz joysticków. Do komunikacji
bezprzewodowej używany jest protokół Bluetooth 2.4 GHz, natomiast komunikacja
tradycyjna wykorzystuje magistralę CAN. W kabinie kontrola systemu, a co za tym idzie
żurawia, odbywa się za pomocą dwóch joysticków ze spustem.
Rysunek 10. Joystick oraz wyświetlacz wchodzące w skład systemu Multidrive2 [10]
Aktualnie wykonywane operacje pokazywane są na wyświetlaczu (rys.10)
wchodzącym w skład systemu. Oferowane jest także zapamiętywanie profili dla maksymalnie
pięciu operatorów. Zapobiega to czasochłonnemu dopasowywaniu stanowiska po każdej
zmianie operatora. W profilu zapamiętywane są między innymi prędkości oraz opóźnienia
(określa jak gwałtownie żuraw odpowie na ruch joystickiem) ruchu żurawia w każdym
kierunku. Joysticki używane w systemie Multidrive2 to Olsbergs D3 (rys.10), są to modele
bezstykowe, pozwalające wykonywać ruch w trzech osiach. W każdym z joysticków znajduje

76
się mikroprocesor, który ciągle odczytuje położenie drążka i wysyła je za pośrednictwem
magistrali CAN. Obok drążka znajduje się pięć przycisków. Przyciski „MENU” oraz „MICRO”
powodują wejście do opcji systemowych bez względu, na którym z dwóch joysticków zostaną
naciśnięte. Natomiast „FUNCTION”, „CHANGE”, „SET” służą do ustawień w profilu
operatora, dotyczących tego joysticka, na którym się znajdują. Joysticki posiadają także
zabezpieczenie przed nieprawidłową kalibracją. Jeśli w momencie uruchamiania systemu
drążek nie będzie znajdował się w pozycji neutralnej, zostanie wyświetlone ostrzeżenie
w postaci migającego trójkąta na wyświetlaczu. Po dziesięciu sekundach, nastąpi
zablokowanie aktywnych funkcji, aby je odblokować wymagane jest ponowne uruchomienie
systemu z prawidłowo ustawionym drążkiem. System TimberTronics jest następcą
rozwiązania Multidrive2. Został on zaprojektowany przede wszystkim do stosowania
w żurawiach przeznaczonych do pracy z drewnem. Największymi zmianami w stosunku do
utartego systemu jest zastosowanie bardziej rozbudowanego joysticka, kolorowego
wyświetlacza z przyciskami, dodanie możliwości przeprowadzania diagnostyki
z wykorzystaniem komputera PC i zintegrowanie opcji ważenia przenoszonego ładunku.
Z powodu braku informacji, nie było możliwe zidentyfikowanie modelu zastosowanego
joysticka oraz producenta nowego systemu.
3.3 Bezprzewodowe pulpity sterownicze
Pulpity sterownicze są bardziej zaawansowaną, bezprzewodową wersją pilotów
sterujących. Często wyposażane są w joysticki, dźwignie elektroniczne, przyciski,
przełączniki, diody oraz wyświetlacze LCD. Dzięki temu pozwalają na dokładniejsze
sterowanie, wykonywanie bardziej precyzyjnych manewrów oraz ustawianie wielu
parametrów żurawia bez konieczności wchodzenia do kabiny czy podchodzenia do panelu
sterowniczego.
Rysunek 11. Pulpity sterownicze firm HBC, IKUSI, Olsbergs oraz Sanreco [7-8]
Na rynku producentów pulpitów bezprzewodowych istnieje wiele firm, są to między
innymi: Autec, Hetronic, Teleradio, Tecsis, Ikusi, Imet. Jednak najpopularniejsze są
kontrolery produkowane przez: HBC Radiomatic, Scanreco oraz Olsbergs. Pulpity
sterownicze produkowane przez te wszystkie firmy są bardzo podobne. Dlatego obecnie
walka producentów koncentruje się na wielkości urządzenia, obecności ekranu LCD, paneli
dotykowych oraz ilości danych, które pulpit może wymieniać z żurawiem. Wymiana danych
z żurawiem jest niezbędna przy bardzo skomplikowanych zadaniach oraz ciężkich
ładunkach. Operator, aby precyzyjnie i bezpiecznie przenosić ładunek musi otrzymywać
w czasie rzeczywistym szczegółowe informacje na temat stanu dźwigu. W najnowszych
rozwiązaniach są one prezentowane na wyświetlaczach LCD. Poza tym mogą być używane

77
jako oznaczenia funkcji przycisków. W tradycyjnych systemach, operator musiał pamiętać
o przeznaczeniu każdego przycisku, czy dźwigni, zależnie od trybu, w którym się znajdował.
W pilotach wyposażonych w wyświetlacze LCD tryb pracy i funkcja każdej dźwigni jest
zmieniana i wyświetlana automatycznie.
Budowa pulpitu przedstawiona zostanie na przykładzie bezprzewodowego pulpitu
sterowniczego oferowanego przez Cargotec, czyli CombiDrive2 (rys.12). Został on
wyprodukowany przez firmę Olsbergs (nazwa producenta Controller Display 6F/8F).
W sprzedaży oferowane są dwie wersje kontrolera, mniejszy z sześcioma dźwigniami
proporcjonalnymi oraz większy z ośmioma. Urządzenia te posiadają także możliwość obsługi
do 12 urządzeń włącz/wyłącz, ważą odpowiednio: mniejsze - 2,1 kg oraz większe - 2,3 kg,
zastosowana bateria ma pojemność 1800mAH i pozwala pracować z urządzeniem około 8h.
Oba modele kontrolera mogą komunikować się z systemem bezprzewodowym za pomocą
fal radiowych lub protokołu Bluetooth 2,4 GHz. CombiDrive2 w stosunku do starszego
modelu został wzbogacony o trzy wyświetlacze LCD. Środkowy wyświetlacz podaje
informacje na temat stanu żurawia. Dwa pozostałe wyświetlacze umieszczone są obok
dźwigni i wyświetlają oznaczenia ich funkcji. Gwarantuje to ciągłe wyświetlanie prawidłowego
symbolu dźwigni, niezależnie od aktualnie wybranego trybu pracy. CombiDrive2 jest częścią
systemu sterowania HiPro, w którego skład wchodzą rozdzielacz V91, komputer sterujący
elektroniką SPACE 5000 oraz następujące funkcje ułatwiające sterowanie żurawiem: OLP,
ADO, ADC, ASC oraz PDF (zarządzanie wydatkiem pompy). Standardowy zestaw, w jakim
dostarczane są pulpity sterowniczy XSDrive oraz CombiDrive2 zawiera: pasek na szyję, pas
biodrowy, dwie baterie, ładowarkę oraz naklejki (tylko XSDrive) pozwalające oznaczać
niestandardowe funkcje.
Rysunek 2.31 Bezprzewodowy pulpit sterowniczy CombiDrive2 [6]

78
Tabela 2. Opis funkcji oraz oznaczeń na kontrolerze CombiDrive2
Lp. Funkcja Lp. Funkcja
1 Wymienna bateria 9 Kontrolka siły sygnału radiowego
2 Przycisk menu żurawia – służy do
funkcji dźwigni 10 Kontrolka stanu naładowania baterii
3 Przycisk sygnału - powoduje
wygenerowanie dźwięku ostrzegawczego
11 Kontrolka funkcji ręcznej kontroli
wysuwania ramion żurawia
4 Przycisk menu dodatkowe – służy
do obsługi funkcji pomocniczych, np. stabilizatory.
12 Wskaźnik aktywności funkcji ADC
5 Przycisk micro - aktywacja
zmniejsza prędkość ruchu do 50% lub 20%
13 Wskaźnik aktualnego menu(CRANE,
EXTRA, ON-OFF)
6 Przycisk aktywacji funkcji włącz/wyłącz dla dźwigni
14 Wskaźnik błędu systemu
7 Stop awaryjny 15 Wskaźnik aktywności trybu micro
8 Wyświetlacze LCD pokazujące
aktualne funkcje dźwigni 16
Wskaźnik konieczności serwisowania żurawia
17 Wskaźnik pracy z klatką
3.4 Smartfon
W dzisiejszych czasach smartfony są jedną z najszybciej rozwijających się gałęzi
branży elektroniki użytkowej. Prawie każdy, kto korzysta z usług telefonii komórkowej
posiada smartfon. Jako pierwsza z firm produkujących żurawie przeładunkowe, potencjał
smartfona dostrzegła firma Faasi. W 2012 roku na targach IAA w Hanowerze
zaprezentowała ona aplikację „Fassi SmartApp”, działającą na smartfonach z systemem
Android.
Rysunek 2.35 System Faasi SmartApp [3]

79
Zapotrzebowanie na taką aplikację wynikało z dużej popularności smartfonów oraz
rosnącej złożoności systemów sterowania dźwigami, które wymagają przetwarzania oraz
prezentowania dużych ilości informacji. Jest to coraz trudniejsze przy użyciu standardowych
kontrolerów. Prezentacja wielu ustawień za pomocą diod, czy monochromatycznego
wyświetlacza LCD przestaje wystarczać. Operatorowi coraz trudniej zapamiętać, które diody
są najważniejsze, a upakowywanie ich coraz większej ilości na kontrolerze zwiększyłoby
znacznie jego rozmiary. Dlatego w rozwiązaniu firmy Faasi, jako HMI wykorzystano
dotykowy wyświetlacz o wysokiej rozdzielczości będący częścią smartfonu. Podstawowe
funkcje aplikacji „Faasi SmartApp” to:
Zbieranie informacji o żurawiu w czasie rzeczywistym – pozwala na optymalizację
sterowania, utworzenie planu konserwacji, czy przewidywanie nadchodzących awarii.
Możliwość zmiany ustawień żurawia, np. progów reakcji dźwigni sterowniczych,
krzywych roboczych elementów dźwigu, aktywacji funkcji pomocniczych.
Kontrola żurawia za pomocą wirtualnych przycisków wyświetlanych na ekranie.
Black Box – umożliwia kontakt z serwisem Fassi i przeprowadzenie zdalnej
procedury diagnostycznej. Polega to na wysłaniu danych oraz alarmów zebranych
podczas prac żurawia przez Internet.
Geo-locator – wykorzystuje system GPS, aby w razie awarii żurawia zlokalizować
najbliższy autoryzowany serwis Faasi, co pozwala maksymalnie zmniejszyć przestoje
spowodowane awariami.
Przeglądanie zgormadzonych danych w formie wykresów.
Komunikacja za pomocą Internetu z komputerem PC, na którym zainstalowane jest
oprogramowanie diagnostyczne.
4. PODSUMOWANIE
Pomimo pozornie prostej budowy, żurawie załadunkowe są urządzeniami bardzo
trudnymi do sterowania. Dlatego do ich obsługi zatrudniani są wykwalifikowani operatorzy,
którzy przechodzą rygorystyczne szkolenia mające na celu zwiększenie wydajności ich pracy
oraz zminimalizowanie ryzyka wypadku. Jednym z czynników utrudniających sterowanie
żurawiami, jest naturalna tendencja do oscylacji ładunku. Z jej powodu nawet dla
doświadczonego operatora, wyzwaniem jest szybkie, bezpieczne oraz dokładne
przeniesienie ładunku, bez rozkołysania go. Zbyt gwałtowne ruchy wysięgnika mogłyby
prowadzić do rozbujania się ładunku, a w konsekwencji zniszczenia go, uszkodzenia
mechanizmów żurawia lub przewrócenia się pojazdu, na którym jest on zamontowany.
Kolejnym wyzywaniem stawianym przed operatorem sterującym żurawiem z poziomu
roboczego (dźwignie hydrauliczne) jest manipulowanie ładunkiem, który znajduję się poza
zasięgiem jego wzroku, na przykład za ścianą lub na dużo większej wysokości. W takim
wypadku, samodzielne ustawienie przez operatora ładunku w precyzyjnie określonym
miejscu jest praktycznie niemożliwe. Aby to zrobić musiałby on odchodzić od stanowiska
sterowniczego i sprawdzać jego pozycję lub korzystać z pomocy innych osób, co obniża
bezpieczeństwo oraz wydajność pracy.
W ostatnich latach, mimo rozwoju technologii budowy urządzeń dźwigowych,
algorytmów sterowania, czy metod tłumienia oscylacji ładunku, niewiele uwagi poświęcono
interfejsom użytkownika oraz temu, jaki wpływ mają one na pracę operatora. Sposób
sterowania większością produkowanych urządzeń dźwigowych nie zmienił się od lat. Wciąż
wykorzystywane są dźwignie połączone bezpośrednio z systemem hydraulicznym, pulpity

80
sterownicze oraz joysticki. Interfejsy te odbierają polecenia operatora, jak np. wciśnięcie
przycisku, a następnie wysyłają sygnał do komputera, gdzie przetwarzany jest on
z wykorzystaniem odpowiedniego algorytmu. Rezultatem tej operacji jest sygnał sterujący,
który przekazany do silników skutkuje np. obrotem podstawy żurawia. Ostatnim trendem
rynkowym jest wykorzystanie bezprzewodowych pulpitów sterowniczych do sterowania
żurawiami załadunkowymi. Przeglądając wyposażenie żurawi załadunkowych, pająkowych,
„leśnych” czy gąsienicowych, można zauważyć, że bezprzewodowe pulpity sterownicze są
coraz częściej oferowane, jako standardowe wyposażenie, a nie opcja. Są one aktualnie
najbardziej zaawansowanymi urządzeniami sterowniczymi przeznaczonymi dla żurawi
przeładunkowych. Wyposażane są w joysticki, dźwignie elektroniczne, przyciski,
przełączniki, diody oraz wyświetlacze LCD. Elementy te, pozwalają na dokładniejsze
sterowanie, wykonywanie bardziej precyzyjnych manewrów oraz ustawianie wielu
parametrów żurawia bez konieczności wchodzenia do kabiny, czy podchodzenia do panelu
sterowniczego. Aktualnie producenci dążą do zwiększenia ilości informacji wymienianych
między pulpitem, a żurawiem oraz prezentacji ich na zintegrowanym wyświetlaczu.
W najnowszych rozwiązaniach funkcje poszczególnych dźwigni lub joysticków prezentowane
na wyświetlaczach LCD, mogą zamieniać się automatycznie zależnie od trybu pracy.
Sterowanie żurawiem załadunkowym za pomocą pulpitu sterowniczego jest efektywniejsze
oraz bezpieczniejsze. Umożliwia on operatorowi samodzielne zaczepienie ładunku do haka,
jak i przeniesienie go dokładnie w wymagane miejsce bez pomocy osoby sygnalizującej. Jest
to możliwe, ponieważ operator ma swobodę poruszania się, wraz z pulpitem i może
w każdym momencie wysyłać polecenia do żurawia. Podczas zaczepiania ładunku może do
niego podejść, a następnie przejść w miejsce, gdzie ładunek ma być przeniesiony. W ten
sposób ma zawsze zapewniony dokładny widok na ładunek oraz otoczenie. Minimalizuje to
ryzyko błędu lub kolizji. Nowością na rynku zaprezentowaną przez firmę Faasi jest aplikacja
„Fassi SmartApp”, która pozwala na odczytywanie informacji o stanie żurawia oraz
sterowanie nim za pomocą smartfonu z systemem Android jednak jest ona nadal w fazie
testów.
Jak pokazują prowadzone na świecie badania, w dzisiejszych czasach - wzrostu
mocy obliczeniowej komputerów, wirtualnych rzeczywistości, środowisk 3D, wykorzystywania
gestów [12] i zmysłów człowieka do sterowania najróżniejszymi urządzeniami (haptic
feedback) [13], pojawiają się pomysły modyfikacji stosowanych dotychczas metod
sterowania [15], a nawet próby stworzenia systemów wirtualnych służących [11] do zdalnego
sterowania żurawiami przeładunkowymi. Producenci tych maszyn coraz częściej zaczynają
dostrzegać to, że technologie wirtualne nie należą tylko do świata rozrywki, ale zaczynają
odgrywać coraz większą rolę w przemyśle.

81
LITERATURA
[1] W. Skrzymowski: “Żurawie przeładunkowe. Budowa i Eksploatacja”, Krosno, 2006,
KaBe.
[2] https://www.palfinger.com/en/emea, stan na 14.10.2016.
[3] http://www.fassi.com, stan na 14.10.2016.
[4] http://www.ghsa.pl, stan na 14.10.2016.
[5] http://www.hbc-radiomatic.com/en/Home.html, stan na 14.10.2016.
[6] http://www.olsbergs.com, stan na 14.10.2016.
[7] http://www.scanreco.se/web/Hem.aspx, stan na 14.10.2016.
[8] http://www.hetronic.com/products/mini_series, stan na 14.10.2016.
[9] http://www.imetradioremotecontrol.com/eng/gamma.php, stan na 14.10.2016.
[10] http://www.cargotec.com/en-global/hiab/pages/default.aspx, stan na 14.10.2016.
[11] Norma PN-EN 12999+A1:2012E.
[12] C. Peng: “Interfaces and control systems intuitive crane control”, Georgia Institute of
Technology, 2009.
[13] R. Sato, Y. Noda, T. Miyoshi, K. Terashima: „Operational Support Control by Haptic
Joystick Considering Load Sway Suppression and Obstacle Avoidance for Intelligent
Crane”, Department of Production Systems Engineering, Toyohashi University of
Technology, 2011.
[14] A. Kivila, W. Singhose, C. Porter: “Human operator studies of portable touchscreen
crane control interfaces”, Industrial Technology (ICIT), 2013 IEEE International
Conference, 2013.
[15] S. Westerberg, I.R Manchester: “Virtual environment teleportation of a hydraulic
forestry crane”, Robotics and Automation, 2008. ICRA 2008. IEEE International
Conference, 2008.

82
Rozdział VII: Interfejsy wizyjne i rozszerzona rzeczywistość w sterowaniu
żurawiami przeładunkowymi
Karol Miądlicki(1), Mirosław Pajor(1)
(1) Zachodniopomorski Uniwersytet Technologiczny w Szczecinie, Wydział Inżynierii Mechanicznej i Mechatroniki, Instytut Inżynierii Materiałowej, Instytut Technologii Mechanicznej, Zakład Urządzeń Mechatronicznych, al. Piastów 19, 70-310 Szczecin Karol Miądlicki: [email protected] Mirosław Pajor: [email protected]
STRESZCZENIE
Sposób sterowania większości produkowanych urządzeń dźwigowych nie zmienił się
od lat. Wciąż wykorzystywane są dźwignie połączone bezpośrednio z systemem
hydraulicznym, bezprzewodowe lub przewodowe kasety i pulpity sterownicze oraz joysticki.
Jednak w dzisiejszych czasach - wzrostu mocy obliczeniowej komputerów, wirtualnych
rzeczywistości, środowisk 3D czy wykorzystywania gestów i zmysłów człowieka do
sterowania najróżniejszymi urządzeniami (haptic feedback), pojawiają się pomysły
modyfikacji stosowanych dotychczas metod sterowania, a nawet próby stworzenia systemów
wirtualnych służących do zdalnego sterowania urządzeniami dźwigowymi. Producenci tych
maszyn coraz częściej zaczynają dostrzegać, że technologie wirtualne nie należą tylko
świata rozrywki, ale zaczynają odgrywać coraz większą rolę w przemyśle.
W poniższej pracy oprócz przedstawienia aktualnego stanu badań nad
nowoczesnymi i eksperymentalnymi interfejsami użytkownika, stosowanymi w urządzeniach
dźwigowych, zaproponowany zostanie system sterowania wirtualnym modelem żurawia
załadunkowego wykorzystujący gesty oraz śledzenie ruchów operatora poprzez czujnik
Microsoft Kinect.
ABSTRACT
The control method of most cranes has not changed for years, still are used the
levers connected directly to the hydraulic system, control panels and joysticks. As shown by
studies conducted in the world today - the growth in computing power, virtual reality, 3D
environments, the use of gestures and human senses to control all types of devices(haptic
feedback), there are ideas to modify previously used methods to control cranes, or even
attempt to create virtual environments used for remote control of loader cranes. The
manufacturers of these machines are increasingly beginning to recognize that virtual
technologies are not only the world of entertainment, but are beginning to play an
increasingly important role in the industry.
In this paper, will be presented the current state of research on modern and
experimental user interfaces used in lifting equipment and will be proposed a system based
on Kinect sensor using gestures and operator tracking for controlling a virtual model of the
loader crane
Słowa kluczowe: żuraw załadunkowy, interfejsy użytkownika, HMI, rzeczywistość
rozszerzona, interfejsy wizyjne
Keywords: loader crane, machine human interface, virtual reality, vison interfaces

83
1. WSTĘP
Żurawie przeładunkowe odgrywają znaczącą rolę w przemyśle. Wykorzystuje się je
na całym świecie na placach budowy, statkach transportowych, w portach, magazynach
i wszędzie tam, gdzie konieczne jest przenoszenie ciężkich obiektów lub towarów. Używane
są także przez służby ratownicze, a nawet wojsko.
Pomimo pozornie prostej budowy, żurawie załadunkowe są urządzeniami bardzo
trudnymi do sterowania. Dlatego do ich obsługi zatrudniani są wykwalifikowani operatorzy,
którzy przechodzą rygorystyczne szkolenia mające na celu zwiększenie wydajności ich pracy
oraz zminimalizowanie ryzyka wypadku. Jednym z czynników utrudniających sterowanie
żurawiami, jest naturalna tendencja do oscylacji ładunku. Z jej powodu nawet dla
doświadczonego operatora, wyzwaniem jest szybkie, bezpieczne oraz dokładne
przeniesienie ładunku, bez rozkołysania go. Zbyt gwałtowne ruchy wysięgnika mogłyby
prowadzić do rozbujania się ładunku, a w konsekwencji zniszczenia go, uszkodzenia
mechanizmów żurawia lub przewrócenia się pojazdu, na którym jest on zamontowany.
Kolejnym wyzwaniem stawianym przed operatorem sterującym żurawiem z poziomu
roboczego (dźwignie hydrauliczne) jest, manipulowanie ładunkiem, który znajduję się poza
zasięgiem jego wzroku, na przykład za ścianą lub na dużo większej wysokości. W takim
wypadku, samodzielne ustawienie przez operatora ładunku w precyzyjnie określonym
miejscu jest praktycznie niemożliwe. Aby to zrobić musiałby on odchodzić od stanowiska
sterowniczego i sprawdzać jego pozycję lub korzystać z pomocy innych osób, co obniża
bezpieczeństwo oraz wydajność pracy. W ostatnich latach mimo rozwoju technologii budowy
urządzeń dźwigowych, algorytmów sterowania, czy metod tłumienia oscylacji ładunku,
niewiele uwagi poświęcono interfejsom użytkownika oraz temu, jaki wpływ mają one na
pracę operatora. Sposób sterowania większości produkowanych urządzeń dźwigowych nie
zmienił się od lat. Wciąż wykorzystywane są dźwignie połączone bezpośrednio z systemem
hydraulicznym pulpity sterownicze oraz joysticki. Interfejsy te odbierają polecenia operatora,
jak np. wciśnięcie przycisku, a następnie wysyłają sygnał do komputera, gdzie przetwarzany
jest on z wykorzystaniem odpowiedniego algorytmu. Rezultatem tej operacji jest sygnał
sterujący, który przekazany do silników skutkuje np. obrotem podstawy żurawia. Ostatnim
trendem rynkowym jest wykorzystanie bezprzewodowych pulpitów sterowniczych do
sterowania żurawiami załadunkowymi. Przeglądając wyposażenie żurawi załadunkowych,
pająkowych, „leśnych” czy gąsienicowych, można zauważyć, że bezprzewodowe pulpity
sterownicze są coraz częściej oferowane, jako standardowe wyposażenie, a nie opcja. Są
one aktualnie najbardziej zaawansowanymi urządzeniami sterowniczymi, przeznaczonymi
dla żurawi przeładunkowych. Wyposażane są w joysticki, dźwignie elektroniczne, przyciski,
przełączniki, diody oraz wyświetlacze LCD. Elementy te pozwalają na dokładniejsze
sterowanie, wykonywanie bardziej precyzyjnych manewrów oraz ustawianie wielu
parametrów żurawia bez konieczności wchodzenia do kabiny, czy podchodzenia do panelu
sterowniczego. Aktualnie producenci dążą do zwiększenia ilości informacji wymienianych
między pulpitem, a żurawiem oraz prezentacji ich na zintegrowanym wyświetlaczu.
W najnowszych rozwiązaniach funkcje poszczególnych dźwigni lub joysticków prezentowane
na wyświetlaczach LCD i zamieniają się automatycznie, zależnie od trybu pracy. Sterowanie
żurawiem załadunkowym za pomocą pulpitu sterowniczego jest efektywniejsze oraz
bezpieczniejsze. Umożliwia on operatorowi samodzielne zaczepienie ładunku do haka, jak
i przeniesienie go dokładnie w wymagane miejsce bez pomocy osoby sygnalizującej. Jest to
możliwe, ponieważ operator ma swobodę poruszania się, wraz z pulpitem i może w każdym
momencie wysyłać polecenia do żurawia. Podczas zaczepiania ładunku może do niego

84
podejść, a następnie przejść w miejsce, gdzie ładunek ma być przeniesiony. W ten sposób
ma zawsze zapewniony dokładny widok na ładunek oraz otoczenie. Minimalizuje to ryzyko
błędu lub kolizji.
2. NOWOCZESNIE INTERFEJSY UŻYTKOWNIKA
Dotychczas opisywane sposoby sterowania żurawiami załadunkowymi są mało
intuicyjne i opierają się głównie na wykorzystaniu dźwigni oraz joysticków. Ponadto
wymagają od operatora wyuczenia się konkretnych ruchów i zachowań, zapamiętania
dużych ilości informacji (oznaczenia diod, przełączników, akcje powodowane przez
wychylenie joysticka) i nie odzwierciedlają zachowania przenoszonego ładunku. Dlatego
trwają badania nad ich rozwojem
2.1. Smartfon
Jako pierwsza z firm produkujących żurawie przeładunkowe, potencjał smartfonu
dostrzegła firma Faasi. Na targach IAA w Hanowerze zaprezentowała ona aplikację „Fassi
SmartApp”, działającą na smartfonach z systemem Android. Zapotrzebowanie na taką
aplikację wynikało z dużej popularności smartfonów oraz rosnącej złożoności systemów
sterowania dźwigami, które wymagają przetwarzania oraz prezentowania dużych ilości
informacji. Jest to coraz trudniejsze przy użyciu standardowych kontrolerów. Prezentacja
wielu ustawień za pomocą diod czy monochromatycznego wyświetlacza LCD, przestaje
wystarczać. Operatorowi coraz trudniej zapamiętać, które diody są najważniejsze,
a upakowywanie ich coraz większej ilości na kontrolerze zwiększyłoby znacznie jego
rozmiary. Dlatego w rozwiązaniu firmy Faasi, jako HMI wykorzystano dotykowy wyświetlacz
o wysokiej rozdzielczości będący częścią smartfonu. Podstawowe funkcje aplikacji „Faasi
SmartApp” to:
Zbieranie informacji o żurawiu w czasie rzeczywistym – pozwala na optymalizację
sterowania, utworzenie planu konserwacji czy przewidywanie nadchodzących awarii.
Możliwość zmiany ustawień żurawia, np. progów reakcji dźwigni sterowniczych,
krzywych roboczych elementów dźwigu, aktywacji funkcji pomocniczych.
Kontrola żurawia za pomocą wirtualnych przycisków wyświetlanych na ekranie.
Black Box – umożliwia kontakt z serwisem Fassi i przeprowadzenie zdalnej
procedury diagnostycznej. Polega to na wysłaniu danych oraz alarmów zebranych
podczas prac żurawia przez Internet.
Geo-locator – wykorzystuje system GPS, aby w razie awarii żurawia zlokalizować
najbliższy autoryzowany serwis Faasi, co pozwala maksymalnie zmniejszyć przestoje
spowodowane awariami.
Przeglądanie zgormadzonych danych w formie wykresów.
Komunikacja za pomocą Internetu z komputerem PC, na którym zainstalowane jest
oprogramowanie diagnostyczne (rys. 2.35).

85
Rysunek 1. Schemat komunikacji między aplikacją SmartApp, a innymi urządzeniami [1]
Interesujące Interesujące badania dotyczące wykorzystania smartfonu, jako
kontrolera przedstawili w [2], A. Kivila, C. Porter i W. Singhose z School of Mechanical
Engineering w Atlancie. Zaprojektowali oni aplikację na system iOS, która symulowała osiem
popularnych interfejsów stosowanych do kontrolowania urządzeń dźwigowych. Interfejsy
zostały podzielone na cztery kategorie, zależnie od sposobu wydawania poleceń:
Dyskretne – operator za każdym przyciśnięciem wysyła sygnał o maksymalnej
amplitudzie w jednym zdefiniowanym kierunku (rys. 2a, b, c).
Ciągłe – użytkownik może regulować amplitudę sygnału, jednak nadal dotyczy ona
tylko jednego zdefiniowanego kierunku (rys. 2d, e).
Wielokierunkowe – operator może proporcjonalnie regulować zarówno amplitudę jak
i kierunek (rys. 2f).
Inne – operator kontroluje urządzenie nie wciskając przycisków, ani nie używając
joysticka (rys. 2g).
Rysunek 2. Schematy GUI symulowanych interfejsów
W celu przetestowania interfejsów zostało zaproszonych 10 ochotników, którzy nigdy
wcześniej nie mieli styczności z tymi urządzeniami. Ich zdaniem było sprawdzenie
wydajności oraz intuicyjność interfejsów na 10-tonowej suwnicy bramowej, sterowanej iPod-
em Touch drugiej generacji, sprzężonym ze sterownikiem PLC firmy Siemens za pomocą
sieci WI-Fi. Testy odbywały się na specjalnie przygotowanym placu manewrowym. Każdy

86
z interfejsów był testowany z normalną, jak i obrotową osią ruchu suwnicy. Dodatkowo do
testów został włączony standardowy pilot sterowniczy. W celu przetestowania intuicyjności
interfejsów operatorzy nie zostali poinstruowani jak ich używać. Ponieważ nigdy nie mieli oni
styczności ze sterowaniem suwnicą, każdy z nich pokonywał plac manewrowy 17 razy. Aby
zminimalizować proces uczenia się interfejsy używane do sterowania były dobierane
w losowej kolejności. Na końcu każdego testu operator wypełniał ankietę, w której oceniał
każdy ze sposobów sterowania.
Otrzymane wyniki przedstawiono na wykresach, poniżej zamieszczone są dwa z nich
(im mniej tym lepiej):
Rysunek 3. Średni czas ukończenia zadania
Rysunek 4. Zrozumienie interfejsu
Okazało się, że jest najbardziej intuicyjnie i przyjazne dla operatora jest sterowanie za
pomocą joysticka lub krzyżaka kierunkowego. Natomiast najgorzej wypadły piloty
sterownicze oraz sterowanie przy pomocy wychylania kontrolera (rys. 3, 4). Zaskoczeniem
okazały się zmienne osie ruchu, które zamiast poprawiać komfort sterowania pogarszały go.
Szczególnie frustrujące było to, że gdy suwnica mijała operatora, jego oś ruchu zmieniała
się, mimo braku ruchu ze strony operatora. Zauważono także, że wielu kontrolujących
suwnicę, zanim przystąpiło do testu, wybierało najdogodniejsze miejsce i nie zmieniało go
przez cały czas badania. W związku z tym, zastosowanie zmiennych osi ruchu nie mogło
przynieść im korzyści.
Przeprowadzone badania pokazały, że operatorzy lepiej radzą sobie
z wykorzystaniem interfejsów, które są proste, intuicyjne i nie wymagają korzystana z „mapy
pamięciowej”. Udowodniono też, że smartfon może być wykorzystywany, jako kontroler
urządzeń dźwigowych, na równi z tradycyjnymi sposobami sterowania.
2.2. Interfejsy wizyjne
Aktualnie trwają prace nad wykorzystaniem wizji oraz wirtualnego środowiska
w sterowaniu urządzeniami dźwigowymi. Dzieje się tak, z powodu stale rosnącej mocy

87
sprzętu komputerowego. Zaczyna on pozwalać na przetwarzanie obrazów wysokiej jakości
z kamer w czasie rzeczywistym, z wykorzystaniem zaawansowanych metod rozpoznawania
obrazów. Powoli staje się także możliwe, generowanie wirtualnych trójwymiarowych światów,
czy rzeczywistości rozszerzonej. Pozwoliłyby one przekazywać operatorowi więcej informacji
niż za pomocą tradycyjnych interfejsów. Na przykład okulary wykorzystujące rozszerzoną
rzeczywistość mogłyby pokazywać linie kolizyjne ramienia żurawia oraz ładunku
z otoczeniem lub dokładnie miejsce na ziemi, gdzie znajdzie się ładunek po opuszczeniu.
Próby wykorzystania tych technologii, we wspomaganiu operatora, przy sterowaniu
żurawiem prowadzone są między innymi na Zachodniopomorskim Uniwersytecie
Technologicznym w Szczecinie, Uniwersytecie w Umeå w Szwecji, czy Georgia Institute of
Technology w Atlancie.
Wykorzystanie systemu wizyjnego oraz znaczników do sterowania 10 tonową
suwnicą zaproponował Chen Chih Peng z Georgia Institute of Technology w [3]. W swojej
pracy postanowił on wykorzystać zamontowaną na wózku suwnicy kamerę (rys. 5a) do
śledzenia pozycji haka roboczego. Aby poprawić, jakość obrazu rejestrowanego przez
kamerę, obok niej zamontowano panel oświetlający z diodami LED. Na haku przyklejono
specjalne znaczniki (rys.5b) z odblaskowego materiału, które pozwoliły oddzielić go od reszty
otoczenia. Następnie za pomocą algorytmów przetwarzania obrazu, wyznaczono położenie
środka haka.
Rysunek 5. Montaż kamery, oświetlenia oraz oznaczenia haka
Do tak opracowanego systemu zaproponowano dwa sposoby sterowania:
Rękawica – jest to czarna rękawica, na której górną stronę naklejono odblaskowy
znacznik, dzięki któremu system wizyjny określa jej pozycję w czasie rzeczywistym.
Zbliżanie rękawic w żądanym kierunku do haka powoduje przesuwanie się wózka
suwnicy, co za tym idzie także haka z ładunkiem (rys. 6b).
Pręt – jest to pręt z zamontowaną odblaskową kulą na końcu. Pełni ona funkcję
znacznika. Zasada działania oraz sterowanie suwnicą, są analogiczne do rękawicy
sterującej (rys 6a).
Rysunek 6. Montaż kamery, oświetlenia oraz oznaczenia haka

88
2.3. Wirtualne środowisko
W [4] opisano wdrożenie i eksperymentalne testowanie systemu środowiska
wirtualnego ze zdalną kontrolą, stworzonego dla żurawia „leśnego”. Połączenie obu tych
technik daje praktycznie nieograniczone możliwości i ma wiele zalet. Jedną z nich jest to, że
operator żurawia mógłby wykonywać swoją pracę z bezpiecznej odległości, co zapewnia mu
znacznie większe bezpieczeństwo. Poza tym, na jego monitorach generowany byłby
wirtualny odpowiednik otoczenia, w jakim fizycznie znajduje się żuraw, byłby on w stanie
przełączać widoki (góra, dół itp.), a nawet w bardziej zaawansowanych rozwiązaniach
płynnie je przesuwać. Umożliwiłoby to dostosowanie widoku do aktualnie wykonywanego
zadania (np. jeśli miałby przeszkodę na linii wzroku, mógłby obrócić tak sceną, aby widzieć
wszystko z boku lub zza przeszkody). Innymi zaletami środowiska wirtualnego jest
możliwość wyłączenia nieistotnych szczegółów z widoku, zmiana koloru istotnych elementów
(np. drzewa do wycięcia), czy dodanie informacji, które mogą ułatwić pracę operatorowi (np.
wyświetlenie kursu optymalnego lub ostrzeżenie przed możliwą kolizją z otoczeniem).
Jednak na pozór tak prosty i genialny pomysł generuje wiele problemów:
Rozmieszczenie kamer lub czujników tak, aby mieć widok na całe otoczenie i nie
narazić ich na zniszczenie.
Zapewnienie podążania kamer i czujników za przemieszczającym się żurawiem.
Opracowanie algorytmów pozwalających na klasyfikację wykrytych obiektów
(kamienie, drzewa) oraz podłoża (woda, błota).
Zapewnienie dużej bezprzewodowej przepustowości w celu uzyskania wysokiej,
jakości obrazu (w lasach dostępność połączenia z Internetem jest bardzo
ograniczona).
Oddanie dynamiki i fizyki rzeczywistego świata (np. bujanie się drzew, czy wiatr).
Skonstruowanie wygodnego i intuicyjnego kontrolera.
Zsynchronizowanie sterowania ze sprzężeniem wizyjnym oraz generowanie
wirtualnego środowiska.
Aktualnie wirtualne środowisko opisane w [4] generowane jest na podstawie
czujników znajdujących się na żurawiu i nie pozwala na dynamiczne wykrywanie
pojawiających się obiektów. Natomiast żuraw przytwierdzony jest na stałe do podestu. Cały
system składa się z 3 podsystemów (kontrola żurawia, pobieranie danych z czujników
otoczenia oraz czujników żurawia). Komunikują się one z komputerem głównym za
pośrednictwem sieci LAN, która zapewnia odpowiednią przepustowość. Oprogramowanie
generujące wirtualne środowisko zostało napisane w języku C++ z wykorzystaniem bibliotek
OpenSceneGraph. Jako urządzenie sterujące wykorzystywany jest joystick. Środowisko
wirtualne aktualizowane jest w czasie rzeczywistym (tylko o ruchy wysięgnika żurawia oraz
ładunku), zostało pokazane na rysunku 7.

89
Rysunek 7. Środowisko wirtualne, z aktywnym systemem unikania kolizji
Na stanowisku sterowania operatorowi przedstawiany jest wirtualny model żurawia
oraz środowiska go otaczającego. Ekran monitora podzielny jest na trzy części: widok
główny oraz dwa widoki pomocnicze. Kamerą widoku głównego można poruszać swobodnie
za pomocą myszy (obracać, przesuwać, oddalać, przybliżać). Możliwe jest także włączenie
funkcji pomocniczych, co pokazuje rysunek 7. Widoczne na nim linie, są efektem
aktywowania algorytmu unikania kolizji z otoczeniem (zielony prostopadłościan). Czerwone
linie pokazują umiejscowienie elementu powodującego kolizję, zielone - zakres ruchu
wysięgnika żurawia, natomiast żółte - optymalną trajektorię pozwalającą na uniknięcie kolizji
generowaną przez algorytm.
Nowością na ryku jest także system zdalnego sterowania żurawiem przeładunkowym
opracowany w centrum badawczo-rozwojowym zakładu Hiab w Stargardzie. Rozwiązanie
wykorzystuje kamery zamontowane na szczycie żurawia leśnego, które pozwalają zobaczyć
obszar roboczy i obsługiwać żuraw zdalnie przy użyciu gogli wirtualnych 3D Oculus Rift.
Obraz z kamer przesyłany jest do gogli zapewniając realistyczne widzenie o zasięgu 240
stopni na obszar pracy. Gdy operator odwróci głowę zmieni się obraz w goglach – obraz
pochodzący z kamer przednich przełączy się na obraz z kamer tylnych. Sterowanie
żurawiem i załadunek drewna na pojazd odbywa się poprzez poruszanie joystickiem. System
nazwany został HiVison (rys 8) i jego celem jest zwiększenie bezpieczeństwa i komfortu
pracy operatora.
Rysunek 8. System sterowania HiVision [5]
2.4. Sterowanie gestami
W ramach prowadzonych przez nas badań nad możliwością zastosowania gestów do
testowania żurawiami załadunkowymi zaprojektowany został wirtualny model żurawia
załadunkowego (wzorowany na istniejącym urządzeniu Hiab XS 099 firmy Cargotec). Jako
środowisko projektowe wykorzystane zostało środowisko Matlab/Simulink z toolboxem

90
Simscape (Simmechanics) oraz język modelowania VRML (model 3D). Model wykorzystany
zostanie do prezentacji sposobów sterowania poprzez czujnik Microsoft Kinect.
Model żurawia został wykonany w taki sposób, że wielkościami zadanymi są kąty lub
wartości wysunięcia dla członów przesuwnych. Belka główna żurawia została na stałe
przytwierdzona do podłoża. Ponieważ został on stworzony do testowania sposobów
sterowania, podczas symulacji nie jest uwzględniania grawitacja, co powoduje ze zachowana
jest jedynie kinematyka ruchu. Belki, między którymi możliwy jest ruch kątowy połączone
zostały za pomocą bloczka „revolute joint”, natomiast belki wysuwne za pomocą bloczka
„prismatic joint”. Do zadawania kątów oraz ich odczytywania wykorzystywane są
odpowiednio bloki „joint actuator” oraz „joint sensor”. Natomiast za pomoczą bloku „body
sensor” możliwe jest wyświetlenie wybranych parametrów kątowych ruchu belek
i parametrów liniowych ruchu i ich charakterystycznych punktów.
Rysunek 9 Model żurawia wykonany w programie Matlab/Simulink z toolboxem
Simscape (Simmechanics)
Model żurawia składa się z trzech części:
Podstawa – zawiera główną belkę przytwierdzoną do podłoża oraz podpory, które
wysuwają się na boki oraz w dół.
Ramię robocze – zawiera podstawową pionową belkę mogącą obracać się na
podstawie oraz dwa ramiona. Ramię pierwsze przytwierdzone jest do belki, a ramię
drugie do pierwszego. Oba ramiona połączone są ze sobą i belką za pomocą złącz
zawiasowych.
Belki wysuwne – dwie belki znajdujące się na szczycie wysięgnika roboczego.
Wysuwają się z poprzedzającego je ramienia drugiego.
Do stworzonego modelu przygotowano dwie wizualizacje. Pierwsza została wygenerowana
automatycznie przez pakiet Simscape. Natomiast drugą stworzono w języku VRML
z użyciem przybornika Simulink 3D Animation. Jej zaletą jest to, że pozwala bardziej
zrozumiale pokazać ruchy robota oraz lepiej zorientować się w przestrzeni trójwymiarowej.
Poniżej przedstawione są rysunki pokazujące model w obu wersjach zestawionych ze sobą
(lewo – Simscape, prawo - VRML)
Rysunek 10. Modele złożonego żurawia – widok tył

91
Do implementacji metod sterowania za pomoczą czujnika Kinect wykorzystane
zostało środowisko Matlab/Simulink wraz z pakietem „Natural Interaction Device”, biblioteki
Kinect SDK & Developer Toolkit oraz język C++. Zaproponowane metody sterowania
prezentowane będą na przygotowanym wcześniej modelu. Pierwszy z zaproponowanych
algorytmów wykorzystuje czujnik Microsoft Kinect, dzięki czemu pozwala kontrolować koniec
wysięgnika roboczego żurawia za pomocą ruchów prawej ręki. Algorytm wykorzystuje
następujące przypisanie ruchów prawej ręki (rys. 11):
Ruch do góry/w dół(oś Y) – przemieszczenie końcówki roboczej odpowiednio w górę
w dół
Ruch prawo/lewo (oś X) – przekręcenie się żurawia o zadany kąt, które pociąga za
sobą ruch końcówki odpowiednio w lewo/prawo
Ruch przód/tył (oś Z) - zwiększenie lub zmniejszenie się zasięgu ramienia roboczego
(ruch przód/tył)
Domyślnym miejscem, z jakiego powinno odbywać się sterowanie żurawiem jest
pozycja z tyłu dźwigu. Operator powinien być zwrócony przodem do wysuniętego ramienia,
zapewniając zgodność osi żurawia z osiami sterowania. Dzięki temu, sterowanie jest
intuicyjne oraz naturalne dla operatora. Przypomina przenoszenie przedmiotu trzymanego
w dłoni. Dokładnie dobranie pozycji sterowania jest bardzo ważne, jej zmiana względem
dźwigu, powoduje niezgodność osi, co czyni sterowanie bardzo trudnym.
Rysunek 11. Opis zależności ruchu końcówki ramienia roboczego żurawia
Jednym z ważniejszych aspektów, podczas tworzenia tego algorytmu sterowania było
wyznaczenie kinematyki dla układu belka podstawowa pionowa, ramię 1 i ramię 2 (rys. 12).
Układ ten jest analogiczny do manipulatora płaskiego o dwóch ramionach. Zadanie
kinematyki prostej w tym przypadku polegało na wyznaczeniu położenia końca manipulatora
(x, y) dla przyjętych wartości zmiennych przegubowych. Współrzędne te zostały obliczone na
podstawie zależności trygonometrycznych:
Natomiast zadanie kinematyki odwrotnej dotyczyło wyznaczenia zmiennych
przegubowych (kątów 𝜃1 oraz 𝜃2 dla których koniec manipulatora znajdzie się we
wskazanym położeniu (x, y). Dla takiego manipulatora kinematyka odwrotna ma rozwiązanie
wyrażone w postaci równań:

92
Drugi z zaproponowanych sposobów sterowania, wykorzystuje gesty lewej ręki do
poruszania się po wirtualnym menu oraz ruch prawej do sterowania wybranymi elementami
modelu żurawia załadunkowego. Sposób ten przystosowany jest do kontrolowania
wysięgnika żurawia, gdy operator stoi prostopadle do niego. Gesty lewej ręki pozwalają
wybierać pozycje z wirtualnego menu. Do poruszania po menu wykorzystywane są trzy
proste gesty:
Ruch poziomy w lewo – powoduje przejście do stanu bezczynności(N), gdy jest on
aktywny ruchy prawej ręki nie wpływają na ruch modelu żurawia.
Ruch poziomy w prawo – gest ten jest aktywny tylko w czasie przebywania w stanie
bezczynności. Powoduje automatyczne złożenie (Z) się lub rozłożenie (R) żurawia,
zależenie od tego, czy operator rozpoczyna pracę, czy ją kończy. Wykrywanie
początku lub końca pracy odbywa się na podstawie danych pobranych z czujników
kąta. Dodatkowo jest możliwość włączenia potwierdzenia wyboru złożenia/rozłożenia
żurawia gestem w lewo wykonywanym bezpośrednio po geście w prawo.
Ruch pionowy w górę – zależnie od aktualnej pozycji w powoduje przełączenie
między sterowanymi elementami modelu żurawia. Kolejne wywołania tego gestu
powodują aktywowanie następujących czynności:
1. Sterowanie ramieniem roboczym w osiach x i y.
2. Obrót ramienia roboczego.
3. Wysuwanie prawej belki oraz podpory.
4. Wysuwanie lewej belki oraz podpory.
Rysunek 12. Opis zależności ruchu elementów modelu żurawia

93
3. PODSUMOWANIE
Przegląd aktualnych badań pokazuje, że powoli podejmowane są próby modernizacji
i ulepszenia konstrukcji tradycyjnych urządzeń sterowniczych. Zauważalne jest dążenie do
zapewnienia coraz większej intuicyjności sposobów sterowania z wykorzystaniem coraz
większej ilości zmysłów operatora [6] oraz wirtualnych środowisk 3D. Jednak przygotowanie
tych metod do wykorzystania w przemyśle wymaga jeszcze wiele czasu oraz pracy. Za
każdym nowatorskim rozwiązaniem kryje się wiele problemów, takich jak: zmiana
przyzwyczajenia operatorów, lokalizacja pozycji operatora względem urządzenia
dźwigowego w celu zapewnienia zgodności osi sterowania, przesyłanie dużych ilości danych
z miejsc, gdzie nie ma zasięgu sieci komórkowych (żurawie leśne), oddzielenie głosu
operatora od dźwięków z zewnątrz (np. komendy głosowe na budowie), odróżnienie
operatora od innych ludzi będących w zasięgu kamery śledzącej gesty i wiele innych.
W praktyczniej części opisany został proces tworzenia wirtualnego modelu żurawia
załadunkowego wzorowanego na realnym modelu Hiab XS 099 firmy Cargotec. Z powodu
braku znajomości pakietu Simmechanics okazało się to zajęciem czasochłonnym. Trudność
stanowiło także dopasowanie zgodności modelu generowanego automatycznie z modelem
stworzonym w języku VRML. Implementacja sterowania oraz współpraca czujnika Microsoft
Kinect ze środowiskiem Matlab/Simulink przebiegła bezproblemowo. Zaproponowane
metody sterowania pozwalają na sterowanie wirtualnym modelem żurawia załadunkowego.
Jednak dotyczą ich te same problemy jak rozwiązań prototypowych omawianych
w teoretycznej części pracy. Stworzone algorytmy są szczególne wrażliwe na pozycję
operatora względem modelu, której zmiana powoduje przesunięcie się osi sterowania oraz
modelu, co czyni sterowanie bardzo nieintuicyjnym. Stworzony program można
rozbudowywać oraz ulepszać na wiele sposobów:
Dodać komendy głosowe.
Rozbudować zestaw obsługiwanych gestów.
Wprowadzić lokalizację operatora względem modelu.
Wprowadzić samoczynne ustawianie się osi sterowania bazujące na pozycji
operatora.
Zintegrować ze sterowaniem okulary rzeczywistości rozszerzonej, które
pokazywałyby trajektorie oraz możliwe kolizje.
Możliwości rozbudowy są właściwie nieograniczone i zależą tylko od wyobraźni twórcy.

94
LITERATURA
[1] http://www.fassi.com, stan na 14.10.2016
[2] A. Kivila, W. Singhose, C. Porter: “Human operator studies of portable touchscreen
crane control interfaces”, Industrial Technology (ICIT), 2013 IEEE International
Conference, 2013
[3] C. Peng: “Interfaces and control systems intuitive crane control”, Georgia Institute of
Technology, 2009
[4] S. Westerberg, I.R Manchester: “Virtual environment teleportation of a hydraulic
forestry crane”, Robotics and Automation, 2008. ICRA 2008. IEEE International
Conference, 2008
[5] http://www.hiab.com/en/global, stan na 14.10.2016
[6] M. Majewski, W. Kacalak: „Human-Machine Speech-Based Interfaces with Augmented
Reality and Interactive Systems for Controlling Mobile Cranes”, Interactive
Collaborative Robotics, 2016, Volume 9812, pp 89-98

95
Rozdział VIII: Koncepcja zastosowania symulatora opartego o technologię
wirtualnej rzeczywistości do szkolenia maszynistów w zakresie
efektywnego energetycznie prowadzenia pociągu
Witold Bartnik(1), Małgorzata Ćwil(2)
(1) Politechnika Warszawska, Wydział Transportu, ul. Koszykowa 75, 00-662 Warszawa
Email: [email protected]
(2) Akademia Leona Koźmińskiego, ul. Jagiellońska 57/59, 03-301 Warszawa
Email: [email protected]
STRESZCZENIE
Celem niniejszego artykułu jest przedstawienie koncepcji wykorzystania symulatora
pojazdu kolejowego w wirtualnej rzeczywistości (VR) do szkolenia maszynistów w zakresie
efektywnej jazdy. Przedstawiona została idea wirtualnej rzeczywistości oraz najnowsze
rozwiązania wykorzystujące tę technologię, takie jak Oculus Rift i HTC Vive. Następnie
zaprezentowano koncepcję eco driving, czyli technik efektywnego prowadzenia pojazdu
kolejowego umożliwiających znaczące ograniczenie zużywanej energii elektrycznej,
sięgające do 15-20%. Omówione zostały także dotychczasowe przykłady zastosowania
symulatorów do szkolenia maszynistów pojazdów trakcyjnych - symulatory te były oparte na
klasycznych technikach immersji, tj. zastosowaniu pełnej kabiny pociągu i wyświetlania
symulacji na ekranach umieszczonych poza tą kabiną. W niektórych przypadkach kabiny
dodatkowo były osadzane na platformach umożliwiających ich ruch w sześciu stopniach
swobody. Następnie zaprezentowana została nowo opracowana koncepcja oparta
o zastosowanie gogli Oculus Rift i technik wirtualnej rzeczywistości. W celu zwiększenia
realizmu, w rozwiązaniu zaplanowane zostało zastosowanie rzeczywistego panelu
maszynisty wraz z nastawnikiem jazdy i hamowania elektrodynamicznego oraz czuwakiem.
Tak zaprojektowany symulator byłby nisko-kosztowym narzędziem do szkolenia nawyków
maszynistów i mógłby służyć wsparciu we wdrażaniu projektów efektywnościowych
w spółkach wykonujących przewóz kolejowy. Docelowo może być także wykorzystywany do
zapoznawania studentów kierunku transport i uczniów techników kolejowych z podstawami
prowadzenia pociągu, sygnalizacji i sterowania ruchem kolejowym oraz zarządzania ruchem
kolejowym.
ABSTRACT
The objective of this article is to present a concept of using a Virtual Reality (VR)
based railway vehicle simulator to provide energy efficient driving training for train drivers.
The idea of virtual reality is presented together with the newest solutions based on it like
Oculus Rift and HTC Vive. Subsequently, the eco driving concept is introduced, which means
the set of techniques aiming at energy efficient railway vehicle control which enable 15-20%
energy consumption reduction. The previous use of simulators for train driver training is
discussed; these simulators were based on classical immersion techniques, which means
using full driver cab and displaying simulation content on displays placed outside of the cab.
These devices have sometimes been mounted on a Stewart platform enabling them to move
in six degrees of freedom. The newly designed concept based on using Oculus Rift goggles
and virtual reality techniques is then presented, in which a real train driver panel together
with a train controller and the deadman’s switch are additionally used in order to increase

96
simulation realism. The thus designed simulator will be a low-cost tool for train driver habit
training and will be used to support efficiency-focused projects for railway transport
operators. It will also be possible to use it as a teaching tool for transportation engineering
and railway school students in order to introduce the basics of train driving, signalling and
train traffic control.
Słowa kluczowe: eco-driving, wirtualna rzeczywistość, VR, symulator, szkolenie, transport
kolejowy
Keywords: eco-driving, VR, simulator, training, railway
1. WSTĘP
Zagadnienie obniżenia zużycia energii trakcyjnej stanowi jeden z głównych
priorytetów przewoźników kolejowych, co wiąże się z jednej strony z wysokimi kosztami
energii i ich dużym udziałem w całkowitym budżecie, a z drugiej strony dążeniem do
większej ekologiczności transportu poprzez uzyskanie jak najmniejszych emisji gazów
cieplarnianych związanych z produkcją energii elektrycznej trakcyjnej lub zużyciem paliwa
dla pojazdów spalinowych. Jedną z metod obniżania tego zużycia może być wykorzystanie
tzw. eco driving, czyli technik jazdy minimalizujących zużycie energii przy danym czasie
w rozkładzie jazdy. O ile problematyka dotycząca optymalizacji przejazdu lub też rozkładu
jazdy pod kątem efektywności energetycznej była już analizowana, o tyle do tej pory
w pracach naukowych, a także w zastosowaniach biznesowych nie rozważano
wykorzystania stosowanych od wielu lat symulatorów kolejowych do szkolenia maszynistów
w zakresie efektywnej energetycznie jazdy. Dodatkowo, wraz z bardzo szybkim rozwojem
technologii wirtualnej rzeczywistości powiązanej z wprowadzonymi w ostatnich latach
urządzeniami osobistymi pozwalającymi za pomocą gogli i dodatkowych komponentów na
stworzenie odczucia kompletnego przeniesienia do wirtualnej rzeczywistości, wydaje się
kwestią czasu wykorzystanie tego typu sprzętu do szkolenia kierujących pojazdami, w tym
maszynistów. Koncepcja proponowana przez autorów opiera się na przeprowadzaniu
szkoleń związanych z technikami eco driving przy użyciu nisko-kosztowych stanowisk
symulacyjnych wykorzystujących gogle wirtualnej rzeczywistości, uproszczony panel
maszynisty z elementarnymi komponentami sterującymi (nastawnik i czuwak) oraz
zaprogramowanej w wirtualnej rzeczywistości realistycznej, trójwymiarowej symulacji trasy
i kabiny maszynisty symulowanego pojazdu.
2. WIRTUALNA RZECZYWISTOŚĆ (VR)
Skala postępu technicznego w zakresie wirtualnej rzeczywistości w ostatnich latach
jest tak duża, że sama definicja tego pojęcia ulega znaczącej ewolucji. R. Stuart [18]
definiuje system środowiska wirtualnego (ang. Virtual Environment System) jako sztuczne,
interaktywne, immersyjne, wielo-sensoryczne środowisko 3D, które wykorzystuje śledzenie
pozycji użytkownika oraz odświeżanie wizualnych, słuchowych i innych sygnałów w czasie
rzeczywistym w sposób odpowiadający ruchowi uczestnika symulacji, co powoduje
wytworzenie wrażenia „bycia” w tym środowisku. Wielo-sensoryczne środowisko oznacza
takie, które angażuje więcej niż jeden zmysł do przekonania użytkownika o prawdziwości
symulacji. Może to być system dla jednego lub wielu użytkowników. Środowisko musi być
sztuczne, ale tworzone w czasie rzeczywistym - nie jest to nagrana wcześniej prezentacja.
Aplikacje w wirtualnej rzeczywistości muszą być też interaktywne [3] - to oznacza, że akcje
użytkownika mają bezpośredni wpływ na system i kontrolują jego zachowanie. Aplikacje VR

97
powinny także zapewniać poczucie immersji, czyli „zanurzenia” w symulacji. Istnieją trzy
różne aspekty immersji. Immersja może być percepcyjna, zapewniająca poczucie obecności
oraz zapewniająca poczucie zaangażowania. Immersja percepcyjna polega na zapewnieniu
kompletnego, sztucznego otoczenia użytkownika, tak aby możliwie wiele jego zmysłów było
angażowanych przez wirtualną rzeczywistość. Zapewnienie poczucia obecności jest
związane z przekonaniem użytkownika, że jest „w” sztucznym środowisku, poprzez
uczynienie go głównym punktem odniesienia aplikacji. Ostatnim elementem jest
zaangażowanie - czyli stopień, w jakim użytkownik ma poczucie że jest głęboko
zaangażowany w środowisko.
2.1. Historia
Koncepcja wirtualnej rzeczywistości pojawiła się w latach 50 XX wieku w pracach
Mortona Heiliga, który jako pierwszy zaproponował i zrealizował wizję symulowania całego
otoczenia uczestnika w sposób, który miał zapewnić niemożliwość odróżnienia symulacji od
rzeczywistości. W 1962 Heilig zbudował pierwsze urządzenie do takiej symulacji, Sensoramę
[6]. Sensorama była, z uwagi na ówczesny poziom technologii komputerowej, całkowicie
mechaniczna, jednak już w połowie lat 60. XX wieku pojawiły się pierwsze projekty
wykorzystujące technikę cyfrową. Ich pionierem był Thomas Furness [20], a jego
największym osiągnięciem w zakresie wirtualnej rzeczywistości był pierwszy symulator
lotniczy do szkolenia pilotów VCASS (Visually-Coupled Airborne Systems Simulator).
Poważne ograniczenia możliwości obliczeniowych i graficznych komputerów spowodowały,
że rozwiązania wirtualnej rzeczywistości cieszyły się niewielką popularnością aż do początku
XXI wieku.
2.2. Sytuacja obecna
W ostatnich latach postęp techniczny umożliwił stworzenie urządzeń, które pozwalają
na osiągnięcie wrażenia całkowitego przeniesienia do świata wirtualnego, przy
jednoczesnym ograniczeniu rozmiarów sprzętu wyświetlającego do wielkości zwykłych gogli.
Do takich urządzeń należą Oculus Rift czy HTC Vive, które współpracują z komputerami
stacjonarnymi oraz Samsung Gear działający w tandemie z telefonami marki Samsung.
Jeden z najbardziej zaawansowanych systemów do generowania wirtualnej rzeczywistości to
Oculus Rift [9]. System ten składa się z gogli, kamery śledzącej położenie użytkownika oraz
dodatkowych (nieobowiązkowych) kontrolerów do zarządzania poruszaniem się w wirtualnej
rzeczywistości, tj. pilota i gamepad’a.
Wirtualna rzeczywistość cieszy się szczególnie dużym zainteresowaniem
w branżach, w których szkolenie w realnych warunkach jest bardzo trudne lub niemożliwe -
takich jak branża lotów kosmicznych, gdzie astronauci muszą przed opuszczeniem Ziemi
zostać stosownie przeszkoleni w warunkach możliwie zbliżonych do rzeczywistych. Z uwagi
na wysoki koszt i poważne ryzyko związane ze szkoleniem w warunkach bojowych lub
szpitalnych, symulatory korzystające z wirtualnej rzeczywistości są też intensywnie
wykorzystywane do szkolenia żołnierzy i przyszłych lekarzy. Dodatkowo wirtualna
rzeczywistość znalazła zastosowanie także w branżach, gdzie szkolenie wymaga
wykorzystywania skomplikowanych i kosztownych maszyn, których dostępność i liczba jest
ograniczona - jak np. w górnictwie [15].
Z badań wynika [19], że do końca 2016 roku ponad 10 milionów użytkowników będzie
posiadało urządzenia umożliwiające korzystanie z wirtualnej rzeczywistości, podczas gdy
jeszcze 5 lat temu tych urządzeń nie było na rynku. Raport ten przewiduje także, że
nasycenie rynku USA urządzeniami do wirtualnej rzeczywistości sięgnie 16% w 2020 roku.

98
3. ECO-DRIVING
Efektywność energetyczna to jeden z podstawowych priorytetów każdego
przewoźnika kolejowego. Wynika to zarówno z faktu, że ekologiczność tego środka
transportu stanowi jedną z jego przewag konkurencyjnych w czasach wzrastającej
świadomości konieczności ochrony środowiska, jak i z tego, że opłaty za energię lub paliwo
stanowią jeden z głównych czynników kosztowych w budżetach większości przewoźników
kolejowych [10; 11]. Należy oczywiście pamiętać, że efektywność energetyczna jest niższym
priorytetem niż bezpieczeństwo, punktualność oraz komfort pasażerów i jakiekolwiek
działania dążące do jej zwiększenia nie mogą być prowadzone kosztem wyższych
priorytetów. Obniżenie zużycia energii można osiągnąć na wiele różnych sposobów.
Większość z nich, tak jak na przykład podwyższenie napięcia w sieci, wymaga z reguły
znaczących inwestycji infrastrukturalnych lub w tabor. Jednym ze sposobów, który takich
nakładów nie wymaga, jest tak zwany Eco Driving, czyli efektywne energetycznie
prowadzenie pociągu. Jest to pojęcie, które pojawiło się pierwotnie w kontekście
oszczędzania energii w eksploatacji samochodów, a dopiero potem zostało przeniesione do
branży kolejowej [1], gdzie jazda efektywna energetycznie jest jednak zupełnie innym
zagadnieniem.
Eco Driving opiera się na wykorzystaniu rezerwy czasowej w rozkładzie jazdy [21].
Przy układaniu rozkładów jazdy operatorzy infrastruktury zawsze pozostawiają pewną
rezerwę czasową względem najszybszego możliwego czasu przejazdu pociągu. Celem tej
rezerwy jest zapewnienie większej punktualności pociągów - w przypadku ustalania
maksymalnie napiętych rozkładów jazdy każde pojedyncze opóźnienie ulegałoby
natychmiastowej propagacji w sieci i opóźniało następne pociągi. Z uwagi na losowy
charakter opóźnień, które mogą być spowodowane takimi czynnikami, jak: pogoda, obsługa
pasażerów na zatłoczonych stacjach, czy awaria taboru, rezerwa czasowa jest konieczna,
ale nie zawsze zostaje wykorzystana. Zużycie energii zależy odwrotnie proporcjonalnie od
czasu przejazdu [14] i zostało to przedstawione schematycznie na rysunku 1.
Rys.1. Zależność zużycia energii od wydłużenia czasu przejazdu

99
Efektywna energetycznie jazda opiera się na wykorzystaniu trzech różnych technik
energooszczędnych: zmniejszonego tempa przyśpieszania, zmniejszonej prędkości
maksymalnej i jazdy wybiegiem (ang. coasting). W ruchu pojazdów szynowych szczególne
znaczenie ma właśnie jazda wybiegiem polegająca na wykorzystaniu rozpędu pojazdu bez
pobierania dodatkowej energii z sieci w celu utrzymania lub podniesienia prędkości. Wynika
to z faktu, że współczynnik tarcia między szyną a kołem stalowym jest niezwykle niski (ok. 10
razy niższy niż analogiczny współczynnik dla asfaltu i opony [22]), a także z minimalnego
zużycia energii przez silnik elektryczny w przypadku niewykonywania pracy.
Zgodnie z literaturą [14], można więc wyznaczyć optymalny przejazd danego odcinka
trasy dla wyznaczonego rozkładu jazdy (i rezerwy czasowej w tym rozkładzie),
charakterystyki trakcyjnej danego pojazdu i jego oporów ruchu. Przejazd taki minimalizuje
zużycie energii, a jednocześnie zapobiega niekorzystnemu z punktu widzenia pasażerów
zjawisku jałowego oczekiwania na odjazd przez pociąg, który przyjechał na stację za
wcześnie względem optymalnego profilu jazdy.
4. SYMULATORY W SZKOLENIU MASZYNISTÓW
Wykorzystanie symulatorów do szkolenia osób obsługujących pojazdy transportowe
jest bardzo popularnym rozwiązaniem z uwagi na możliwość tworzenia i trenowania sytuacji,
które nie są możliwe do replikacji na prawdziwym pojeździe - np. zderzenia, awarie, sytuacje
niebezpieczne. Dodatkowo, symulatory pozwalają znacząco obniżyć koszty szkolenia,
szczególnie w początkowej fazie, gdy przyszły operator pojazdu nie jest jeszcze
zaznajomiony z urządzeniami sterującymi - pozwala to uniknąć angażowania rzeczywistego
taboru, którego główną rolą jest przewóz pasażerów lub ładunków. Nowoczesne rozwiązania
pozwalają także badać reakcje osób szkolonych na zdarzenia zachodzące w symulacji, na
zmęczenie oraz czy dekoncentrację [5] i pozwalają instruktorowi ocenić, czy dany kandydat
będzie potrafił w nieprzewidzianej sytuacji prawidłowo się zachować.
W chwili obecnej rynek symulatorów kolejowych na świecie jest stosunkowo
rozwinięty. Głównymi potentatami w branży są francuska firma CORYS (ok. 900
dostarczonych urządzeń) [4] oraz hiszpańska firma Lander [7]. Na rynku polskim pojedyncze
symulatory dostarczyła firma AutoComp Management - po 1 sztuce dla Przewozów
Regionalnych, PKP Intercity oraz Kolei Mazowieckich. Są to klasyczne symulatory oparte na
replikacji kabiny faktycznego pojazdu i wyświetlaniu obrazu symulacji na ekranach, a co za
tym idzie - wymagają znaczącej ilości przestrzeni. Dodatkowo, na targach kolejowych
InnoTrans 2016 w Berlinie firma Qumak zaprezentowała własne rozwiązanie - symulator
pojazdu kolejowego zabudowany na platformie samochodu ciężarowego, co umożliwia
transport symulatora pomiędzy poszczególnymi ośrodkami szkoleniowymi, np. w ramach
danego przewoźnika. Wszystkie te rozwiązania mogą uwzględniać zabudowę symulatora na
platformie umożliwiającej ruch kabiny maszynisty w sześciu stopniach swobody, co zwiększa
realizm symulacji i pozwala na odtworzenie efektów przyśpieszenia, hamowania czy
skręcania pojazdu.
Zmieniające się warunki na rynku pracy maszynistów oraz rosnące wymagania
organów nadzorczych względem szkoleń doprowadziły do zmian ustawodawczych. Zgodnie
z rozporządzeniem [13], od 2018 roku wszyscy maszyniści będą zobowiązani brać udział
w regularnych szkoleniach na symulatorach. Ten wymóg znacząco zwiększył
zapotrzebowanie na symulatory wśród przewoźników i znalazł odzwierciedlenie
w Specyfikacji Istotnych Warunków Zamówienia przetargów na dostawę elektrycznych
zespołów trakcyjnych dla województw Zachodniopomorskiego [16] i Dolnośląskiego [17].

100
Dostępne obecnie na rynku i eksploatowane przez przewoźników symulatory
stanowią rozwiązania kompleksowe, ale jednocześnie stosunkowo kosztowne. Ich głównym
celem jest szkolenie maszynistów w zakresie obsługi pojazdów i zachowania zasad
bezpieczeństwa, nie dotykają one natomiast w sposób znaczący technik efektywności
energetycznej. Stosowane obecnie rozwiązania symulatorowe nie zawsze mogą też
zapewnić pełny realizm i immersję w odczuciu osoby szkolonej. Wynika to
z wykorzystywanego zazwyczaj w tego typu urządzeniach wyświetlania obrazu jedynie przed
maszynistą - podczas gdy badania wskazują na kluczowe dla realizmu znaczenie obrazu po
obu stronach osoby szkolonej [8]. Dodatkowo, często symulatory takie nie uwzględniają
efektów dźwiękowych, które również są bardzo istotne dla uzyskania efektu immersji [8].
Obie te kwestie nie stanowią problemu dla nowoczesnych gogli wirtualnej rzeczywistości
takich jak Oculus Rift. Rozwiązaniem, które mogłoby zapewnić możliwość szkolenia
maszynistów w zakresie energooszczędnej jazdy, przy stosunkowo niskich kosztach
stworzenia i wdrożenia, jest wykorzystanie tego typu urządzenia.
5. KONCEPCJA SZKOLENIA DLA MASZYNISTÓW W OPARCIU O WIRTUALNĄ
RZECZYWISTOŚĆ
Proponowany symulator pociągu w wirtualnej rzeczywistości składa się z części
fizycznej oraz części programistycznej. Część fizyczna symulatora to wszystkie realne
komponenty, które wchodzą w skład urządzenia, takie jak panel maszynisty, gogle wirtualnej
rzeczywistości, czy komputer. Część programistyczna składa się z wygenerowanego
środowiska 3D na zewnątrz pojazdu, odwzorowanej w 3D kabiny maszynisty oraz logiki
symulacji wraz z odwzorowaniem fizycznym ruchu pojazdu i zużycia energii. Ogólny schemat
proponowanego rozwiązania przedstawia tabela 1.
Tabela.1. Schemat proponowanego rozwiązania
5.1. Część fizyczna symulatora
Głównym komponentem fizycznej części symulatora jest panel maszynisty. W celu
zapewnienia immersji, panel maszynisty odpowiada realnemu panelowi pojazdu szynowego
i jest wyposażony w rzeczywiste elementy sterowania, takie jak nastawnik jazdy i hamowania
i czuwak. Wspomniane elementy powinny być wykorzystywane w symulacji do sterowania
pociągiem w sposób analogiczny do rzeczywistych pojazdów szynowych. W zależności od
docelowego poziomu skomplikowania i realizmu symulacji inne elementy, takie jak przycisk

101
otwierania drzwi, czy sygnał „Baczność” mogą być dodawane, niemniej jednak z uwagi na
pierwotny cel symulatora (eco driving) instalacja nastawnika wydaje się nieodzowna. Tego
typu uproszczony panel maszynisty został już zaproponowany jako narzędzie wspierające
szkolenie osób prowadzących pojazdy kolejowe [2]. Równie kluczowym komponentem
są gogle wirtualnej rzeczywistości wraz z kamerą. Ich zadaniem jest przede wszystkim
zapewnienie uczestnikowi symulacji poczucia kompletnego zanurzenia w świecie symulacji
poprzez wyświetlanie stale odświeżanego obrazu obecnego położenia pociągu
z uwzględnieniem zmian zachodzących w wyniku sterowania pojazdem przez użytkownika.
Poczucie immersji jest zwiększone poprzez sygnały dźwiękowe emitowane przez dołączone
do gogli słuchawki - takie jak stukot kół na szynach, czy odgłos silnika elektrycznego
w trakcie przyśpieszania i hamowania. Ostatnim składnikiem fizycznej części symulatora jest
komputer odpowiadający za uruchomienie aplikacji symulatora i generowanie środowiska
3D. W związku z wysokimi wymaganiami sprzętowymi związanymi z generowaniem
środowisk wirtualnej rzeczywistości komputer wykorzystywany w tej roli musi cechować się
bardzo dobrymi parametrami obliczeniowymi, a w szczególności wysokiej klasy kartą
graficzną.
5.2. Część programistyczna symulatora
Najważniejszy komponent części programistycznej to logika symulacji wraz z fizyką
pojazdu. Odpowiadają one za odbieranie sygnałów wysyłanych przez fizyczne urządzenia,
takie jak nastawnik i czuwak, przetwarzanie kolejnych pętli symulacji w zależności od
obecnych parametrów, takich jak prędkość i przyśpieszenie pojazdu oraz wyświetlenie
w goglach VR obrazu, który wiarygodnie oddaje specyfikę poruszania się pojazdu
szynowego. W tym celu konieczne jest zapewnienie dostatecznie wysokiej częstotliwości
odświeżania symulacji (minimum 60Hz), które pozwala zapobiec zjawisku migotania obrazu
oraz zakodowanie w aplikacji prawidłowych równań fizycznych opisujących ruch wybranego
pojazdu szynowego, a także powiązane z nim zużycie energii. Drugim, kluczowym
składnikiem części programistycznej jest środowisko 3D symulacji. W zależności od
wymagań szkoleniowych może ono być fikcyjne lub oparte na rzeczywistej trasie kolejowej.
W zastosowaniach symulatora u przewoźnika kolejowego celem maszynistów w zakresie
efektywności energetycznej zalecane jest przeprowadzanie treningu na realnych trasach,
gdyż pozwoli to na szkolenie dobrych nawyków w zbliżonych do rzeczywistości warunkach.
Poziom szczegółowości odzwierciedlenia środowiska rzeczywistego ma duże znaczenie dla
poczucia immersji - w przypadku gogli VR jest jednak ograniczony z góry przez
rozdzielczość gogli. Jest to problem, który należy wziąć pod uwagę projektując elementy
takie jak znaki drogowe czy semafory. Ostatnim komponentem części programistycznej jest
odwzorowanie 3D kabiny pojazdu. Z uwagi na pełną swobodę ruchów głową w goglach VR
konieczne jest odzwierciedlenie całości kabiny. Szczególnie kluczowym zagadnieniem jest
takie skalibrowanie symulacji i położenia gogli, aby zapewnić zgodność położenia realnych
elementów sterowania na panelu maszynisty z ich umiejscowieniem względem obserwatora
w wirtualnej rzeczywistości. Wszelkie błędy w tej kalibracji będą zaburzać poczucie immersji
i prowadzić do problemów z korzystaniem z symulatora.

102
6. WNIOSKI
Zastosowanie symulatorów do szkolenia maszynistów w zakresie efektywnego
energetycznie prowadzenia pojazdu szynowego jest obiecującym sposobem na wdrożenie
eco Driving w spółkach kolejowych i zmniejszenie zużycia energii związanej z ruchem
pociągów. Poprzez wykorzystanie najnowszych technologii związanych z wirtualną
rzeczywistością, np. gogli typu Oculus Rift lub HTC Vive możliwe jest stworzenie
nowoczesnego, niskobudżetowego rozwiązania, które pozwoli na wysokie poczucie
zanurzenia w świecie symulacji. Za pomocą takiego symulatora możliwe będzie
przeprowadzanie lekcji efektywnej jazdy, w ramach których maszyniści będą szkoleni, jak
sposób prowadzenia pociągu wpływa na zużycie energii oraz jakimi technikami to zużycie
może być zmniejszone przy zachowaniu wymagań bezpieczeństwa i dotrzymaniu rozkładu
jazdy. Proponowane rozwiązanie może stanowić nowy element w treningu kandydatów na
maszynistów i wobec potencjalnych oszczędności z nim związanych dobrze wpisuje się
w politykę dążenia do gospodarki niskoemisyjnej.
LITERATURA
[1] Auerbach, P., & Kukla, W. (2013). Istota i zasady ekojazdy, czyli integralna część
szkolenia w przedsiębiorstwach świadczących usługi transportowe.Zeszyty Naukowe
Politechniki Poznańskiej. Organizacja i Zarządzanie, (60), 5-19.
[2] Bejenka, K., & Stegenta, P. (2013). Uproszczony model pulpitu maszynisty dla
symulatora pojazdu szynowego do celów szkolenia maszynistów. Pojazdy Szynowe, (1),
23-29.
[3] Bierbaum, A., Just, C., Hartling, P., Meinert, K., Baker, A., & Cruz-Neira, C. (2001,
March). VR Juggler: A virtual platform for virtual reality application development.
In Virtual Reality, 2001. Proceedings. IEEE (pp. 89-96). IEEE.
[4] Corys, http://www.corys.com/en [dostęp: 16.11.2016].
[5] Dorrian, J., Roach, G. D., Fletcher, A., & Dawson, D. (2007). Simulated train driving:
Fatigue, self-awareness and cognitive disengagement. Applied Ergonomics, 38(2), 155-
166.
[6] Heiling, M. (1962). US Patent #3,050,870, Sensorama Simulator Patent,
http://www.mortonheilig.com/SensoramaPatent.pdf [dostęp: 12.11.2016].
[7] Lander, http://www.landersimulation.com/ [dostęp: 16.11.2016].
[8] Naweed, A. (2013). Simulator integration in the rail industry: the Robocop
problem. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail
and Rapid Transit, 227(5), 407-418.
[9] Oculus Rift, https://www3.oculus.com/en-us/rift/ [dostęp: 11.12.2016].
[10] PKP SA Raport Roczny 2014, http://pkpsa.pl/grupa-pkp/raporty/Annual-Report-PKP-
Group-2014_ENG.pdf, [dostęp: 12.11.2016].
[11] Przewozy Regionalne, Raport Roczny 2013, http://www.przewozyregionalne.pl/
sites/default/files/pliki/131/raport-roczny-pr-2013-2.pdf, [dostęp: 12.11.2016].
[12] Roach, G. D., DORRIAN, J., Fletcher, A., & Dawson, D. (2001). COMPARING THE
EFFECTS OF FATIGUE AND ALCOHOL CONSUMPTION ON LOCOMOTIVE
ENGINEERS'PERFORMANCE IN A RAIL SIMULATOR. Journal of human
ergology, 30(1/2), 125-130.

103
[13] Rozporządzenie Ministra Infrastruktury i Rozwoju (2014). nr 1566 z dnia 13 listopada
2014 r. w sprawie ośrodków szkolenia i egzaminowania maszynistów oraz kandydatów
na maszynistów. Dziennik Ustaw Rzeczypospolitej Polskiej.
[14] Scheepmaker, G. M., Goverde, R. M., & Kroon, L. G. (2017). Review of energy-efficient
train control and timetabling. European Journal of Operational Research, 257(2), 355-
376.
[15] Seidel, R. J., & Chatelier, P. R. (Eds.). (2013). Virtual reality, training’s future?:
perspectives on virtual reality and related emerging technologies (Vol. 6). Springer
Science & Business Media.
[16] Specyfikacja istotnych warunków zamówienia dla postępowania prowadzonego w trybie
przetargu na wykonanie i dostawę elektrycznych zespołów trakcyjnych dla województwa
Zachodniopomorskiego (2016), Urząd Marszałkowski Województwa
Zachodniopomorskiego, Szczecin, http://bip.rbip.wzp.pl/sites/bip.wzp.pl/ files/articles/
18.04.16r.siwz.pdf [dostęp: 15.11.2016].
[17] Specyfikacja istotnych warunków zamówienia dla postępowania prowadzonego w trybie
przetargu na wykonanie i dostawę elektrycznych zespołów trakcyjnych dla województwa
Dolnośląskiego (2016), http://www.kolejedolnoslaskie.4bip.pl/index.php?idg=7&id=99&
x=94 [dostęp: 15.11.2016].
[18] Stuart, R. (1996). The design of virtual environments.
[19] Superdata (2016), Virtual Reality Industry Report, https://www.superdataresearch.com/
market-data/virtual-reality-industry-report/ [dostęp: 12.11.2016].
[20] Sutherland, I. E. (1965). The ultimate display. Multimedia: From Wagner to virtual reality.
[21] Urbaniak, M., & Jacyna, M. (2015). Wybrane zagadnienia wielokryterialnej optymalizacji
ruchu kolejowego w aspekcie minimalizacji kosztów. Problemy Kolejnictwa, (169), 61-67.
[22] Vuchic, V. R. (2007). Urban transit systems and technology. John Wiley & Sons.

104
Rozdział IX: Standard LTE jako perspektywa rozwoju technologii GSM-R
mgr inż. Grzegorz Olczyk
Akademia Leona Koźmińskiego, ul. Jagiellońska 55/57, 03 – 301 Warszawa
STRESZCZENIE
Global System for Mobile Communications-Railway – GSM-R jest standardem
telekomunikacyjnym opierającym się na transmisji głosu i danych w sieciach kolejowych
i wykorzystywanym obecnie w większości krajów na świecie. GSM-R oraz ETCS stanowią
integralną część systemu ERTMS, który zastępuje istniejącą do tej pory analogową
technologię sygnalizacji na kolei. Istnieje niewiele publikacji i literatury podejmującej próby
przeprowadzenia studium na temat rozwoju systemu GSM-R w Polsce. O ile istnieją badania
przeprowadzane głównie w krajach skandynawskich i azjatyckich, o tyle w Polsce poza
nielicznymi publikacjami zajmującymi się problematyką wpływu działania sieci komórkowych
działających komercyjnie na system GSM-R, badania na temat przyszłości GSM-R są
zaniedbane. W niniejszym artykule przedstawiony jest zarys koncepcji konwergencji sieci
GSM-R i LTE poprzez możliwość zastosowania technologii CSFB (Circuit Switch Fall Back)
w transmisji głosu np. pomiędzy maszynistami a personelem utrzymania tj. dyspozytorami.
W tym celu, w pierwszej części tekstu przedstawiony jest ogólny schemat działania sieci
GSM-R oraz LTE z wyróżnieniem technologii transferu głosu. W drugiej, opisane są
wymagania mechanizmu QoS (Quality of Service) podczas zestawiania połączenia
głosowego zgodnie z technologią GSM-R oraz LTE. Ostatnia część przedstawia założenia
projektu badawczego, którego głównym celem jest zaprezentowanie perspektywy
przeprowadzenia badań empirycznych na polskich odcinkach linii kolejowych już
wykorzystujących technologię GSM-R.
Słowa kluczowe: GSM-R, LTE, CSFB, QoS, 3GPP
ABSTRACT
Global System for Mobile Communications-Railway – GSM-R is a
telecommunications standard which is based on the transmission of voice and data in railway
networks, and currently employed in most countries in the world. GSM-R and ETCS are an
integral part of ERTMS, which supersedes analog signaling technology on the railway. There
exists few publications and literature attempting to conduct a development study on the
GSM-R system in Poland. Apart from a few publications dealing with the impact issue of the
commercially operating networks on system GSM-R, the studies on the future of the GSM-R
are neglected. This article presents an outline the concept of convergence GSM-R and LTE
technology through its support for CSFB in voice transmission, e.g. between drivers and
maintenance personnel, i.e. dispatchers. For this purpose, the first part of the text presents a
general flow chart of GSM-R and LTE with distinction of technology transfer voice. In the
second, the requirements of QoS during a call connection with the technology of the GSM-R
and LTE are exhibited. The last part presents the assumptions of the research project,

105
whose main objective is to present the perspective of empirical research on the Polish
sections of railway lines already using technology GSM-R.
Keywords: GSM-R, LTE, CSFB, QoS, 3GPP
1. WSTĘP
Obecnie można zaobserwować w literaturze trend świadczący o tym, że technologia
LTE [1] może zastąpić istniejącą infrastrukturę GSM-R [2],[3],[4],[5]. W przeprowadzonych
analizach widać, że takie uwarunkowania jak racjonalność wykorzystania zasobów
sieciowych, ekonomiczny charakter obsługi i utrzymania sieci LTE w porównaniu ze
starzejącą się już technologią GSM-R stanowią silny argument w rozważaniach nad
alternatywą dla istniejących systemów wdrożonych w transporcie kolejowym. Znajduje się
wtedy przestrzeń, którą można uzupełnić przeprowadzając wstępne analizy możliwości
rozbudowy sieci z wykorzystaniem najnowocześniejszej technologii LTE. W Polsce usługi
sieci LTE świadczone są przez wszystkich operatorów i zakładają dostępność dla większości
populacji w kraju. Założeniem artykułu jest sprawdzenie możliwości zastosowania metody
transmisji głosu w oparciu o zasoby sieci LTE oraz GSM-R. Jednocześnie w oparciu
o wymagania QoS, zaprezentowanie rozwiązania, które może stanowić ciekawą alternatywę
podczas podejmowania decyzji o rozbudowie istniejących sieci GSM-R. W rezultacie
zaproponowanie modelu badawczego, którego celem będzie wykonanie kolejnych analiz
QoS. W związku z powyższym, pierwsza część opracowania zawiera zarys systemu GSM-R
i jego wymagań QoS. W drugiej części, zgodnie z wymogami 3GPP znajduje się schemat
wymiany wiadomości sygnalizacyjnych podczas zestawiania połączenia głosowego
w procedurze CSFB oraz VoLTE, jako alternatywy realizacji połączeń głosowych w sieciach
LTE. Natomiast w trzeciej części zaprezentowane są i opisane przykładowe reprezentacje
wymiany wiadomości sygnalizacyjnych z wykorzystaniem dwóch różnych chipsetów,
a w ostatniej części, poza wnioskami, znajdują się własności modelu badawczego do
dalszych analiz.
2. GSM-R
W 1992 roku UIC (International Union of Railways) rozpoczęło projekt integracji
systemów komunikacji na kolei. Głównym celem był stworzenie funkcjonalności i wymagań
technicznych, które poprzez sieć mobilną wypełniałyby potrzeby operacyjności wykraczające
poza granice jednego operatora. W rezultacie prac nad projektem powstały dwie grupy
robocze, które opracowały podstawy działania nowego systemu opisane w dokumentach
SRS (System Requirement Specification) oraz FRS (Functional Requirement Specification)
[6],[7],[8]. Przemysł związany z komunikacją kolejową używa bezprzewodowych systemów
komunikacji od wielu lat, a większość operatorów linii kolejowych rozwinęło sieć GSM-R
zarówno w celu komunikacji głosowej oraz jako platforma sygnalizacji pomiędzy
maszynistami a kontrolerami ruchu, jako element systemu ETCS level 2 (European Train
Control System) [9]. Kluczowe dla opisywanego podejścia staje się uwzględnienie systemu
sygnalizacji ETCS, które zapewnia spełnienie wszystkich wymagań dotyczących sterowania
ruchem pociągów oraz komunikacji pomiędzy nimi oraz dyspozytorem. ETCS obok GSM-R
jest centralną częścią systemu ERTMS(Rail Traffic Management System) i dostarczając
w czasie rzeczywistym informacje dla kontrolerów ruchu oraz maszynistów zwiększa
elastyczność zarządzania ruchem w porównaniu do sieci analogowych. GSM-R jest oparta
na drugiej generacji (2G) technologii telekomunikacyjnej GSM oraz na dwóch projektach
zwanych EIRENE (European Integrated Radio Enhanced Network) oraz MORANE (Mobile

106
Oriented Radio Network). Funkcjonalność systemu GSM-R jest taka sama jak sieć GSM
oraz posiada podobną infrastrukturę sieciową, choć bogatszą o dedykowane usługi takie na
przykład jak adresowanie funkcyjne, czy wywołania grupowe przy połączeniach głosowych
[10]. Najważniejszą różnicą pomiędzy systemami GSM i GSM-R są przedziały częstotliwości,
na których działają urządzenia. GSM-R jest obsługiwane w dedykowanym kanale
o szerokości 4MHz (876-880 MHz „w górę” oraz 921-925 MHz „w dół”) [7]. Częstotliwości te
zarezerwowane są dla linii kolejowych w całej Unii Europejskiej, co efektywnie wpływa na
interoperacyjność sieci [11]. Architektura całego systemu GSM-R składa się z trzech
podsystemów, pierwszy z nich: BSS (Base Station Subsystem), w którego skład wchodzą
takie elementy jak sterowniki stacji bazowych BSC (Base Station Controler) oraz stacje
bazowe BTS (Base Transceiver Station), drugi system to CN (Core Network), w którym
znajdują się centrale MSC (Mobile Switching Center), VLR (Visitor Location Register), baza
usług i rejestry użytkowników HLR (Home Location Register), trzeci podsystem to strefa
użytkownika sieci, czyli terminal mobilny oraz urządzenia sterujące w przypadku ETCS. Sieć
GSM-R różni się od komercyjnej sieci GSM tym tylko, że w tej pierwszej można odnaleźć
dodatkowy moduł zintegrowany z MSC i odpowiedzialny za wywołania i połączenia głosowe
w obrębie grup użytkowników GCR (Group Call Register) [10], [11]. Zastosowanie
dodatkowych funkcjonalności, które odróżniają sieć dedykowaną na potrzeby transportu
kolejowego GSM-R od GSM oraz szczególne wymogi związane z bezpieczeństwem
i niezawodnością sieci telekomunikacyjnej spowodowało potrzebę specyfikacji parametrów
QoS (Quality of Service). Wymagania QoS dla połączeń głosowych w GSM-R opisane
w procedurze [12] przedstawia Tabela 1.
Tabela1. Parametry QoS dla GSM-R
Parametry QoS Wartość
Opóźnienie podczas zestawiania połączeń
wychodzących
< 8.5s (95%), ≤ 10s (100%)
Współczynnik błędów w zestawianiu
połączeń
< 0,01
Maksymalne opóźnienie w transferze
danych w blokach 30B
≤ 0.5s (99%)
Współczynnik zerwanych połączeń ≤ 0,01/h
Okres interferencji w transmisji < 0.8s (95%), < 1s (99%)
Okres transmisji bez błędów > 20s (95%), > 7s(99%)
Opóźnienie rejestracji do sieci ≤ 30s (95%), ≤ 35s (99%), ≤ 40s (100%)
Na potrzeby tego opracowania oraz ograniczenia w dostępności danych
empirycznych wybrane zostały trzy parametry: opóźnienie połączeń, współczynnik błędów
w zestawianiu połączeń oraz współczynnik zerwanych połączeń. Wyniki przeprowadzonych
testów wykorzystujących rozwiązanie CSFB opisane poniżej, przedstawione są w dalszej
części.

107
3. CSFB – METODA LTE
3.1. Technologia LTE
LTE jest czwartą generacją (4G) sieci telekomunikacyjnej opartej na protokole
internetowym (IP) [13]. Głównymi elementami sieci są E-UTRAN, w którym zawarte są stacje
bazowe eNodeB (BTS w systemie GSM) oraz sieć szkieletowa EPC (Evolved Packet Core)
składająca się z modułów - między innymi z MME, S-GW (odpowiednio: MSC i BSC w GSM)
oraz HSS (odpowiednik HLR w GSM), a całość tworzy system EPS (Evolved Packet System)
[14]. W celu ograniczenia kosztów oraz zwiększenia efektywności wykorzystania łącz
sygnalizacji, w tym opóźnień w sygnałach, sieć LTE posiada mniejszą ilość węzłów
logicznych w porównaniu z GSM. Szczególnym przypadkiem usług wykorzystywanych
w sieciach LTE jest transmisja głosu. W sieciach GSM połączenia głosowe przenoszone są
poprzez technologię komutacji łącz (CS - Circuit Switch), czyli węzły MSC, natomiast w LTE
transmisja odbywa się po łączach IP, jako usługa VoLTE (Voice over LTE). Dlatego też,
kiedy połączenia są wykonywane z sieci LTE do technologii 2G i 3G (i w odwrotnym
kierunku) mogą występować problemy z ich komutacją. Analogicznie rzecz może mieć
miejsce dla technologii GSM-R. W celu rozwiązania problemów na interfejsie różnych
technologii wprowadzono metodę CSFB.
3.2. Połączenia głosowe z wykorzystaniem procedury CSFB
CSFB (Circuit Switch Fall Back) umożliwia przydzielenie usługi głosu poprzez
ponowne wykorzystanie infrastruktury CS, gdy urządzenie mobilne jest obsługiwane przez
sieć LTE (E-UTRAN). Metoda sprawia, że podczas inicjowania albo odbierania połączenia
głosowego terminal połączony do sieci LTE jest automatycznie przełączany do sieci 2G lub
3G pod warunkiem, że zasięg sieci E-UTRAN pokrywa się z zasięgiem sieci 2G/3G [15].
W tym przypadku brana pod uwagę jest sieć 2G, czyli GSM (GSM-R). Na Rys.1
przedstawiono przykładową architekturę sieci LTE, w której przykładowo urządzenie mobilne
jest scharakteryzowane i umieszczone w pojeździe kolejowym i poprzez interfejsy radiowe
Uu, Um oraz LTE-Uu połączone z siecią LTE, GSM-R lub UTRAN (3G).
Rys.1. Architektura sieci LTE dla CSFB [16]
Procedura zestawiania połączenia z wykorzystaniem metody CSFB zawiera w sobie
zastosowanie się do reguł przedstawionych w specyfikacji 3GPP [15], w których uwzględnia

108
się parametry transmisji zawierającej protokoły sygnalizacyjne pomiędzy wszystkimi
elementami schematu sieci przedstawionym powyżej. Wymiana wiadomości
sygnalizacyjnych w procedurze CSFB jest zobrazowana na schemacie (Rys.2.). Brakuje
w polskiej literaturze odpowiedników terminologii użytej na tym rysunku, dlatego tworzenie
nowych pojęć oraz opisywanie wszystkich procesów wybiega poza cel niniejszego artykułu.
Wobec powyższego skupiona będzie uwaga na kluczowych wiadomościach, takich jak:
1a-1b. Urządzenie mobilne (w sieci LTE) wysyła do sieci poprzez interfejs S1 wiadomość
Extended Service Request, która zawiera znacznik CSFB – na jego podstawie MME zleca
wykonanie procedury CSFB.
2. Stacja eNodeB może (w przypadku CSFB do 2G) zlecić wykonanie lub pobrać pomiary
przez urządzenie mobilne w celu wyboru (przez eNodeB) najlepszego pod względem
poziomu sygnału BTS.
3a.-3b.-4. Po wybraniu najlepszego BTS, do którego skierowane zostanie urządzenie
mobilne sieć wysyła wiadomość RRC Connection Release z informacją (release with
redirection), na jaką częstotliwość/BTS (z przedziału zarezerwowanego dla GSM-R) ma
zostać przeprowadzone przekierowanie.
[...] 10. Z chwilą, kiedy urządzenie mobilne jest już zarejestrowane do sieci 2G/3G (po
udanej procedurze Location Area Update) wykonuje inicjację połączenia wychodzącego MO
(Mobile Originating) zgodnie z procedurą w sieci 2G/3G [17].
Rys.2.Schemat wymiany wiadomości podczas zestawiania połączenia CSFB [15]

109
3.3. Połączenia głosowe z wykorzystaniem procedury VoLTE
Alternatywą dla CSFB dla połączeń głosowych z wykorzystaniem sieci LTE jest
metoda VoLTE.Voice over LTE będąca standardem, który został wprowadzony w celu
realizacji usług połączeń głosowych przy wykorzystaniu zasobów sieci IP, których nośnikiem
jest sieć LTE. W oparciu o standard IMS (IP Multimedia Subsystem), który jest dedykowany
do sieci IP wprowadzono specyfikację usługi VoLTE [18], [19]. W porównaniu z sieciami 2G
i 3G, w VoLTE efektywność wykorzystania zasobów sieciowych (szersze pasmo
częstotliwości nośnej) [20] oraz jakości transmisji głosu (kodowanie AMR-WB) [21] jest
nieporównywalnie wydajne i racjonalne pod kątem kosztów infrastruktury sieciowej.
W przypadku zastosowania usługi VoLTE dla sieci kolejowych, twierdzi się, że pod
względem rozwiązań funkcjonalnych oraz procedur spełniających wymagania QoS
rozwiązanie VoLTE może być silnym kandydatem, jako następca systemu połączeń
głosowych w GSM-R [5]. Dla potrzeb niniejszego artykuły metoda ta nie będzie opisywana,
ponieważ założeniem jest wykorzystanie istniejących zasobów sieciowych GSM-R, które
podczas wykonywania procedury VoLTE nie są zastosowane.
4. ROZWIĄZANIE CSFB dla GSM-R
4.1.Przykładowy scenariusz protokołowy
Każdy obecnie produkowany telefon komórkowy posiada procesor zwany SoC
(System-on-a-Chip) dalej zwany chipsetem, który posiada dwa odrębne systemy komunikacji
oparte na dwóch systemach procesorowych: AP (Application Processor) – odpowiadający za
wykonywanie obliczeń oraz obsługę aplikacji zainstalowanych na telefonie i pozostających
wyłącznie na użytek procesów wewnętrznych w telefonie, natomiast CP (Communication
Processor) [22] odpowiada za protokoły sygnalizacyjne w komunikacji z sieciami
bezprzewodowymi (2G/3G/LTE/Wifi/Bluetooth itp.) oraz obsługę procesów w bezpośrednich
interfejsach z AP, tak jak chipset Snapdragon [23] produkowany przez koncern Qualcomm,
stosowany np. w telefonach Iphone5, albo chipset Exynos [24] produkowany przez
Samsung, np. w telefonach Galaxy S6. Oprogramowanie modułu CP jest ściśle związane
i oparte na wymaganiach specyfikacji technicznych takich jak 3GPP dla sieci komórkowych,
dlatego dla potrzeb analiz będzie wykorzystywana wiedza teoretyczna pochodząca
z publikowanych dokumentów 3GPP oraz doświadczenia w analizach protokołów
sygnalizacyjnych.
Podczas procedury CSFB sieć przekazuje informacje do Ue z komendą release with
redirection, w wiadomości sygnalizacyjnej obsługującej ten proces zawarte są dane na temat
częstotliwości, na którą urządzenie zostanie przekierowane. Informacje, jaka dokładnie
częstotliwość powinna być wybrana, są zapisane w rejestrach eNodeB w procesie
planowania sieci. Procedura CSFB zarówno dla sieci UTRAN oraz GSM jest taka sama.
Urządzenie korzystające z zasobów sieci LTE zostaje przekierowane do sieci GSM poprzez
procedurę zawartą w wiadomości RRC Connection Release. LTE podaje informacje na
temat częstotliwości, jaką ma wybrać urządzenie, następnie używając tych zasobów
poszukuje właściwą (pod względem parametrów jakościowych sygnału) stację bazową, aby
po jej znalezieniu rozpocząć (na podstawie informacji zawartych w SIB – System Information
Block) procedurę przejścia ze stanu jałowego (IDLE) do stanu połączonego (CONNECTED).
Na podstawie wieloletnich doświadczeń w analizie błędów w protokołach
sygnalizacyjnych w różnych interfejsach sieciowych do opisu procedury CSFB, właściwe

110
wydaje się podejście, w którym poddane analizie będą chipsety dwóch różnych
producentów. Forma prezentacji wymiany wiadomości jest bardzo podobna i odpowiada
kryterium przyjętym w specyfikacji 3GPP [15] oraz na Rys.2. Istotnym zastrzeżeniem jest to,
że prezentowana procedura CSFB odnosi się do przekierowania połączenia z systemu LTE
do 3G, zamiast do 2G (GSM). Jest to spowodowane tym, że w obecnie działających sieciach
(w komercyjnych lokalizacjach) rzadko spotykana jest konfiguracja, w której urządzenie
mobilne znajduje się w lokalizacji, gdzie występuje zasięg LTE i 2G (bez 3G).
Uwarunkowanie to jest zaznaczone w ostatniej części opracowania.
4.2. Opóźnienie zestawiania połączeń wychodzących – wyniki dwóch testów
„Opóźnienie zestawiania połączenia” to czas, który jest zdefiniowany pomiędzy
wysłaniem żądania (komenda ATD – AT command Dial), a identyfikacją tego zdarzenia
poprzez wiadomość CONNECT dla połączeń głosowych albo zmianę wartości DCD (Data
Carrier Detect) na „włączone” - dla transmisji danych [12]. W specyfikacji dotyczącej, jakości
transmisji połączeń głosowych i multimedialnych zawarta jest definicja stosowana obecnie
w świecie telekomunikacji bezprzewodowej i określa ona, że czas zestawiania połączenia
jest okresem czasu pomiędzy wysłaniem wiadomości adresowanej, a odbiorem notyfikacji
o połączeniu przychodzącym [25]. Jest to równoznaczne z wysłaniem wiadomości Extended
Service Request (komenda ATD) oraz otrzymaniem wiadomości Alerting. Wiadomość
CONNECT pojawia się w momencie odbioru połączenia przez użytkownika (naciśnięcie
„zielonej słuchawki”), czyli może nastąpić w dowolnej chwili. Z tego względu przyjmuje się,
że rzeczywisty czas (opóźnienia) zestawienia połączenia liczy się od momentu pojawiania
się wiadomości Alerting zgodnie z założeniami wspomnianej specyfikacji. Na Rys. 3 oraz
Rys. 4 czas opóźnienia dla obu chipsetów wynosi odpowiednio t1=5,86s i t2=6,97s.

111
Rys.3. Procedura CSFB (t1), warstwa L3, Exynos
Rys.4. Procedura CSFB (t2), warstwa L3, Snapdragon
Szczegółowe wyniki podane są w Tabeli 2. Zdefiniowany czas zestawiania
połączenia jest równoznaczny z pojęciem “opóźnienia zastawiania połączenia
wychodzącego” stanowiącego element QoS z rozdziału 2 oraz opisany również w [26].
Istniejąca literatura w niewielkim stopniu wyposaża inżynierów w wiedzę dotyczącą
czasów zestawiania połączeń CSFB na podstawie przeprowadzonych testów. Z tego
14:29:26.192 EXTENDED SERVICE REQUEST 14:29:26.192 rrcConnectionRequest 14:29:26.289 rrcConnectionSetup 14:29:26.289 rrcConnectionSetupComplete 14:29:26.292 securityModeCommand 14:29:26.292 securityModeComplete 14:29:26.293 ueCapabilityEnquiry 14:29:26.293 ueCapabilityInformation 14:29:26.703 rrcConnectionRelease redirectedCarrierInfo: utra-FDD utra-FDD: 10688 14:29:26.850 CM SERVICE REQUEST 14:29:27.041 rrcConnectionRequest 14:29:27.141 rrcConnectionSetup 14:29:27.346 rrcConnectionSetupComplete 14:29:27.648 securityModeCommand 14:29:27.650 securityModeComplete 14:29:27.650 ROUTING AREA UPDATE REQUEST 14:29:27.747 SETUP 14:29:28.142 CALL PROCEEDING 14:29:32.053 ROUTING AREA UPDATE ACCEPT 14:29:32.053 ROUTING AREA UPDATE COMPLETE 14:29:32.053 ALERTING 14:29:33.876 CONNECT 14:29:33.876 CONNECT ACKNOWLEDGE 14:29:36.982 DISCONNECT LTE, 3G RAT
04:35:43.874 Extended service request Msg service_type = 0 (0x0) (mobile originating CS fallback) 04:35:45.358 CCCH UL/RRC Connection Request 04:35:45.575 CCCH DL/RRC Connection Setup 04:35:45.698 DCCH UL/RRC Connection Setup Complete 04:35:45.700 MM/Location Updating Request 04:35:45.700 GMM/Routing Area Update Request 04:35:46.010 MM/Identity Request 04:35:46.011 MM/Identity Response 04:35:46.120 GMM/Authentication And Ciphering Request 04:35:46.365 GMM/Authentication And Ciphering Response 04:35:46.651 MM/Authentication Request 04:35:46.741 GMM/Routing Area Update Accept 04:35:46.908 MM/Authentication Response 04:35:47.171 MM/Identity Request 04:35:47.171 MM/Identity Response 04:35:48.271 MM/Location Updating Accept 04:35:48.272 MM/TMSI Reallocation Complete 04:35:48.273 MM/CM Service Request 04:35:48.390 MM/CM Service Accept 04:35:48.391 CC/Setup 04:35:48.701 CC/Call Proceeding 04:35:48.721 CC/Facility 04:35:50.845 CC/Alerting 04:35:50.886 CC/Connect 04:35:50.888 CC/Connect Acknowledge 04:35:58.330 CC/Disconnect LTE, 3G RAT

112
powodu dane empiryczne oparte są na specyfikacjach pochodzących od producenta
chipsetu Snapdragon firmy Qualcomm [27] oraz na podstawie [28]. Średnie czasy ze
specyfikacji przedstawione są w Tabela 2.
Tabela 2. Średnie czasy zestawiania połączeń CSFB
Rozwiązanie CSFB do 2G (GSM-R) CSFB do 3G (UMTS)
QualcommSnapdragon [6] ~5,9s ~5,1s
Samsung Galaxy SIII LTE [7] ~5,3s ~4,7s
Na podstawie przyjętych założeń przeprowadzono testy połączeń głosowych
w Instytucie R&D Samsung Polska z wykorzystaniem chipsetu Exynosoraz chipsetu
Snapdragon. W przeprowadzonych testach połączeń, w warunkach przemieszczania się (2h
jazdy samochodem w otoczeniu miejskim i wykonanie 100 prób połączeń wychodzących,
operator T-Mobile Polska) z wykorzystaniem dwóch modeli telefonów, z chipsetami
opisanymi powyżej uzyskano następujące rezultaty:
- średni czas opóźnienia zestawienia połączenia CSFB do 3G wyniósł odpowiednio t1=6,67s
dla Exynos i t2=7,01s dla Snapdragon;
- ilość połączeń nieudanych (współczynnik błędów w zestawianiu połączeń < 0,01) wyniósł 0;
- ilość połączeń zestawionych i niezerwanych (współczynnik zerwanych połączeń≤ 0,01/h)
wyniósł 0.
5. MODEL BADAWCZY
Obecnie sieć GSM-R w Polsce jest częściowo zbudowana i w pełni funkcjonuje na
przykład na odcinku E65 (Warszawa – Gdynia) oraz E20 (Kunowice – Terespol) [29]. W celu
przeprowadzenia analiz i odpowiedzenia na pytanie, w jaki sposób sieć LTE może zastąpić
GSM-R, należy wybrać takie lokalizacje, w których zasięg LTE na odcinkach linii kolejowych
zapewnia pełne pokrycie. Takich miejsc w kraju jest niewiele, dlatego dane empiryczne
z tych lokalizacji będą stanowić uzupełnienie tych przeprowadzonych w krajach
skandynawskich [5],[30],[31]. Na podstawie przeprowadzonych wyżej analiz można
zbudować model badawczy, który będzie stanowić podstawę do rozstrzygnięcia następującej
hipotezy: Metoda CSFB spełnia wymagania QoS dotyczące połączeń w GSM-R. W tym celu
wykorzystany powinien zostać plan badawczy zawierający następujące założenia:
- wykonanie testów połączeń głosowych oraz transmisji danych w warunkach terenowych,
w których przewiduje się realizację 100 prób połączeń wychodzących w trybie
przemieszczania się,
- lokalizacje powinny być dobrane w taki sposób, aby umożliwić spełnienie warunków
dostępności, na całym badanym odcinku zasięgu zarówno sieci LTE, jak i GSM-R,
- do testów powinny być użyte komercyjne telefony komórkowe, których moduły
komunikacyjne CP są, co najmniej tej samej klasy jak te użyte w próbach opisanych
powyżej,

113
- testy połączeń powinny być wykonywane w warunkach, gdzie urządzenie mobilne znajduje
się w lokalizacji, w której występuje zasięg tylko dwóch sieci: LTE i GSM,
- sieć komercyjna powinna mieć zaimplementowaną konfigurację eNodeB uwzględniającą
zasoby częstotliwościowe GSM-R, czyli zakres przedziałów i ich wartości powinien zostać
zapisany do rejestrów eNodeB, MME.
5.1.Poglądowy schemat pomiarowy
Na Rys. 5 przedstawiony został przykładowy model strukturalny zawierający schemat
sieci oraz umiejscowienie elementów pomiarowych. Składa się z podzespołów istniejącej
infrastruktury sieci kolejowej GSM-R operatora PKP PLK oraz elementów sieci dostępowej
LTE operatora T-Mobile Polska. Odcinek pomiarowy, to ok. 40km fragment trasy E65
zaczynający się w okolicach Pruszcza Gdańskiego (A), a kończący się na stacji w Gdyni (B).
Spełnia dwa przedstawione wcześniej warunki, czyli zapewnia zasięg sieci LTE – dane
zebrane na podstawie wewnętrznych systemów pomiarowych operatora T-Mobile oraz
zasięgu sieci GSM-R.
Rys.5. Schemat pomiarowy modelu badawczego [33],[34]
W celu przeprowadzenia testów połączeń głosowych, terminal mobilny oraz
urządzenia tworzące „moduł pomiarowy w kabinie” mogą znajdować się wewnątrz składu,
który jest używany do regularnych połączeń pasażerskich PKP. Optymalnym rozwiązaniem
jest wyniesienie końcowej części systemu radiowego (terminal mobilny) na zewnątrz składu
w celu uzyskania najlepszych warunków radiowych (najlepszy sygnał liczony w dBm).
W opisanych testach, w punkcie 4.2. terminal mobilny był na stałe zamontowany na szybach
okiennych przemieszczającego się samochodu testowego, dlatego to rozwiązanie również

114
może być brane pod uwagę. Wymiana wiadomości sygnalizacyjnych, czyli pomiar czasu
opóźnienia zestawiania połączenia wykonać można poprzez analizę danych protokołowych
zebranych podczas wykonywania prób połączeń na odcinku linii kolejowej.
7. WNIOSKI
Przedstawione rozwiązanie może stanowić interesującą alternatywę w przypadku
rozważań na temat rozwoju sieci GSM-R w kierunku LTE. Teoretycznie można przyjąć, że
podczas wymiany infrastruktury sieciowej, z GSM na LTE, w tzw. okresie przejściowym
(w przypadku sieci komercyjnych okres przejścia z sieci 2G do LTE to okres kilku lat) można
wykorzystywać dotychczasowe zasoby sieciowe GSM-R równocześnie z istniejącą siecią
komercyjną lub nową siecią zbudowaną i dedykowaną tylko do celów komunikacji kolejowej.
Ponadto, systemy protokołowe oparte na specyfikacji 3GPP dają możliwości
projektowania sieci zgodnie z ich wymaganiami, ale również pozwalają na wprowadzanie
usprawnień i dodatkowych funkcjonalności w sygnalizacji 3GPP. Z tego przywileju często
korzystają producenci terminali mobilnych (np. Samsung, Apple), sprzętu do infrastruktury
sieciowej (np. Ericsson, Nokia) oraz operatorzy telekomunikacyjni (np. T-Mobile, Orange),
którzy na podstawie patentów oraz alternatywnych sposobów wykorzystania tych samych
zasobów sieci sygnalizacyjnej optymalizują procedury. Charakterystyka sieci GSM-R,
w której nie istnieją złożone algorytmy planowania zasobów (np. mniejsza ilość relacji
sąsiedzkich na stacjach BTS) może przyczynić się do zastosowania bardziej „sztywnego”
definiowania procedur wymiany wiadomości sygnalizacyjnych, w tym przypadku czas
wykonania procedury CSFB może być skrócony na przykład drogą wyeliminowania operacji
w trybie LAU/RAU albo realizacji uproszczonej komendy Release with Redirection, gdzie
częstotliwości mogą być trwale zdefiniowane. Dzięki takim rozwiązaniom można uzyskać
cenne sekundy np. w operacji „opóźnienia połączenia” i oddalić się od progów przyjętych
w wymogach QoS.
Technologia GSM starzeje się, szczególnie w obszarze rynku telekomunikacyjnego,
czego pierwsze symptomy można dostrzec w USA, gdzie operator AT&T z końcem 2016
roku wyłącza całkowicie sieć GSM [32], natomiast w sektorze kolejowym cykl życia produktu,
jakim jest GSM-R biegnie według innych uwarunkowań. Przyjmuje się, że do roku 2025 sieć
GSM-R będzie wspierana i utrzymywana przez operatorów [9],[30], a w niektórych krajach,
na przykład w Polsce jest wciąż na etapie rozbudowywania, dlatego istnieje przestrzeń
czasowa oraz zasobowa, aby przeprowadzać więcej badań nad wykorzystaniem sieci LTE
w transporcie kolejowym.

115
LITERATURA
[1] ETSI, ETSI TR 125 913 V8.0.0, Requirements for Evolved UTRA (E-UTRA) and
Evolved UTRAN (EUTRAN), 2009.
[2] K. Guan, Z. Zhong, B. Ai, Assessment of LTE-R Using High Speed Railway Channel
Model,” w: Communications and Mobile Computing (CMC), 2011 Third International
Conference.
[3] F.J. Martin-Vega, I.M. Delgado-Luque, F. Blanquez-Casado i in., LTE performance
over high speed railway channel, 2013, IEEE.
[4] A. D. Zayas, C. A. G. Perez P. M. Gomez, Third-generation partnership project
standards: For delivery of critical communications for railways, IEEE, 2014.
[5] A. Sniady, M. Sonderskov, J. Soler, VoLTE Performance in Railway Scenarios, 2015,
IEEE.
[6] L. Pushparatnam, T. Taylor., GSM-R Implementation and Procurement Guide V 1.0,
2009, UIC ISBN: 978-2.
[7] EIRENE, GSM-R Operators Group, System Requirements Specification ver. 15,
2014, str. 36.
[8] EIRENE, GSM-R Operators Group, Functional Requirements Specification ver. 7.4.0,
2014.
[9] A. Bertout, E. Bernard, Next Generation of Railways and Metros Wireless
Communication Systems, 2012, ASPECT, Institution of Railways Signal Engineers.
[10] I. Ljubic, D. Simunic, Advanced Speech Call Items for GSM-Railway, 2009, IEEE.
[11] A. Sniady, J. Soler, An overview of GSM-R technology and its shortcomings, 2012,
IEEE, str. 627.
[12] ERTMS, “SUBSET-093: GSM-R Interfaces; Class 1 requirements”, 2005, str. 14.
[13] S.Sesia, I.Toufik, M.Baker, LTE. The UMTS Long Term Evolution, 2009, Wiley.
[14] C.Cox, An Introduction to LTE, 2012, Wiley.
[15] 3GPP, 3GPP TS 23.272 V10.3.1, Circuit Switched (CS) fallback in Evolved Packet
System (EPS), 2011, str. 25.
[16] C. Gessner, O. Gerlach, Voice and SMS in LTE, 2011, Rohde&Schwarz, str. 5.
[17] 3GPP, 3GPP TS 32.407 V10.0.0, Core Network (CN) Circuit Switched (CS) domain,
2010, str. 15.
[18] GSMA, IMS Profile for Voice and SMS ver. 7.0, 2013.
[19] M.Poikselka, H. Holma, J.Hondistoi in., Voice Over LTE, 2012, Wiley.
[20] P.Mogensen, W.Na, I.Z. Kovacs i in. LTE capacity compared to the Shannon bound,
2007, IEEE 65th Vehicular Technology Conference-VTC2007-Spring.
[21] 3GPP, 3GPP TS 26.190 V1.0.0, AMR Wideband speech codec, 2000, str. 14.
[22] W. Badawy, G.A. Julien, System-on-Chip for Real-Time Applications, 2002, Springer
[23] https://www.qualcomm.com/products/snapdragon - dostęp 11.2016.
[24] http://www.samsung.com/semiconductor/minisite/Exynos/w/ - dostęp 11.2016.
[25] ETSI TS 102 250-2 V2.2.1, Speech and multimedia Transmission Quality (STQ),
2011.
[26] Systemics-PAB, Raport z badania porównawczego wartości wskaźników jakości
usług w sieciach ruchomych przedsiębiorców telekomunikacyjnych w Polsce,
Załącznik 3, 2015, UKE, str.12.
[27] Global Mobile Suppliers Association – Qualcomm & Ericsson, Circuit-switch fallback,
2013, https://www.qualcomm.com/documents/circuit-switched-fallback-first-phase-
voice-evolution-mobile-lte-devices.

116
[28] A. Tekovic, I.Pesut, Z.Moric, Voice Service in an LTE Network-CSFB, 2013, ELMAR,
2013 55th International Symposium, IEEE.
[29] http://radiotech.pl/aktualnosci/z-kraju/1392-dalsza-ekspnasja-gsm-r-w-polsce.html -
dostęp 11.2016.
[30] S. Amundsen, Future Rail Communication – Implementation Scenarios for LTE, 2013,
Norwegian University of Science and Technology.
[31] G. Lindstrom, Is GSM-R the limiting factor for the ERTMS system capacity, 2012,
KTH Railway Group.
[32] https://www.att.com/esupport/article.html#!/wireless/KM1084805 - dostęp: 11.2016.
[33] S. Ruesche, J. Steuer, K.Jobmann, The European Switch. A Packet-Switched
Approach to a Train Control System, 2008, IEEE, str. 39.
[34] M. Sauter, From GSM To LTE. An Introduction to mobile networks and mobile
broadband, Wiley, str. 208

117
Rozdział X: Metody komunikowania stanów afektywnych w urządzeniach
mobilnych
Jakub Trojanowski(1), Michał Folwarczny(1) , Piotr Hrebieniuk(1), Remigiusz Szczepanowski(1)
(1) Uniwersytet SWPS Humanistycznospołeczny, II Wydział Psychologii we Wrocławiu
Email: [email protected], [email protected], [email protected]
Abstract
W dobie komunikacji mobilnej za pomocą smartfonów, komunikatorów internetowych, czy
smsów odczytanie stanu afektywnego interlokutora stanowi nie lada wyzwanie, będąc
przyczyną nieporozumień, błędnej interpretacji afektywnej rozmówcy lub też braku
zrozumienia. Odczuwane emocje przez człowieka w tego typu interakcjach społecznych
manifestują się poprzez ciało w formie gestów, mimiki, mikromimiki, czy też napięcia
mięśniowego. Sygnały te pełnią nie tylko funkcję podstawowego źródła informacji o stanie
afektywnym jednostki, ale usprawniają, czy wręcz umożliwiają komunikację międzyludzką.
W naszych badaniach poszukaliśmy sposobów kodowania emocji w komunikacji mobilnej na
poziomie gestów wywoływanych podczas spostrzegania bodźców afektywnych. Do
rejestrowania znaków afektywnych użyto ekranu dotykowego telefonu typu smartfon ze
specjalnie przygotowanym oprogramowaniem, mierzącym kluczowe składowe gestów,
wykonywanych na ekranie dotykowym, będących motoryczną odpowiedzią na bodziec
afektywny o określonym ładunku pobudzenia oraz znaku. W badaniach wykazano istotne
zmiany początkowej siły nacisku w funkcji spostrzeganej emocji, sugerujące, że wyższe
pobudzenie może skutkować silniejszą tendencją do powstrzymywania się od wykonania
danego gestu. Wykazano również, że wrażenia przyjemności/przykrości spostrzeganej
emocji istotnie zmieniają trajektorię wykonywanych gestów w kierunku wertykalnym – wzorce
dla negatywnych emocji rejestrowano w górnych częściach ekranu, zaś wzorce odpowiedzi
dla pozytywnych emocji obserwowano przy ruchach w dolnych częściach ekranu.
Słowa kluczowe: komunikacja, stan afektywny, urządzenia mobilne, smartfon
Keywords: communication, affective state, mobile devices, smartphone
1. WSTĘP
Liczba użytkowników smartfonów w 2016 roku szacowana jest na ponad 2 miliardy.
W 2014r. było ich 1,5 miliarda zaś do 2019r. szacuje się wzrost sięgający około 2,7 miliarda
użytkowników [1]. Co więcej, w krajach rozwiniętych i rozwijających się, odsetek osób
korzystających ze smartfonów oscyluje w granicach 90% populacji tych krajów. Przykładowo,
w przedziale wiekowym 18-34 w Niemczech i Stanach Zjednoczonych odsetek ten wynosi
92%, a we Francji szacuje się go na około 85 % [2].
Technologia cały czas rozwija się, a urządzenia mobilne stają się coraz bardziej
popularne, wypełniając niemal każdą z przestrzeni życiowych człowieka i opanowując nowe.
Dostępność i powszechność urządzeń mobilnych, nieograniczony dostęp do sieci zmienia
sposoby komunikowania się człowieka. Tam, gdzie kiedyś potrzebna była rozmowa w cztery
oczy, teraz wystarczy wiadomość tekstowa lub e-mail. Z jednego punktu widzenia ułatwia to

118
kontakt, czyni go sprawniejszym, dostępnym o dowolnej porze. Z drugiej zaś strony
powoduje, że nie mamy bezpośredniej styczności z naszym interlokutorem. W takich
warunkach nie jesteśmy w stanie wnioskować z mimiki, tonu głosu, postaw o emocjach
rozmówcy, jak również trudno nam osobiście wyrażać emocje, zwłaszcza jeśli mają są one
tak subtelny charakter. Dlatego pojawia się pytanie, czy dysponując dzisiejszymi zdobyczami
technologicznymi możemy taki stan rzeczy udoskonalić? Czy nowoczesna technologia może
usprawnić komunikację i uczynić ją bardziej czytelną, a tym samym obiektywną? Uważamy,
że tak.
2. Istniejące mobile systemy komunikowania stanów afektywnych
W przypadku komunikacji afektywnej w urządzeniach mobilnych przykładem
rozwiązania, w którym integruje się pomiar obiektywnych biomarkerów oraz subiektywne
odczucia użytkowników jest system zaproponowany przez Fagerberg i współpracowników
[6]. System kodowania afektywnego zaimplementowano w telefonie komórkowym
SonyEricsson P800, w którym przesyłanie informacji tekstowych SMS było uzupełnione
o treść afektywną. Użytkownicy systemu proszeni byli o subiektywne wyrażanie treści emocji
poprzez ruch pióra cyfrowego na ekranie dotykowym. W systemie przyjęto założenie
ucieleśnienia emocji w postaci wykonywanych gestów, tzn. że proces komunikowania afektu
odnosi się do analizy wykonywanych gestów. W szczególności badacze zaimplementowali
w systemie kodowanie emocji w oparciu o kształt oraz siłę wykonywanych gestów za
pomocą ruchu pióra cyfrowego, które odnosiły się w sposób dyskretny do stanów
afektywnych takich jak: podniecenie, złość, obawa–zaskoczenie, zaskoczenie–
zainteresowanie, duma, satysfakcja, smutek, stan zakochania. Założone odczucia
użytkowników, odniesione do gestów w postaci charakterystycznych ruchów oraz
związanego z nim wysiłku, wytypowano na bazie analizy zapisów wideo aktora,
odgrywającego gesty, odpowiadające określonemu stanowi afektywnemu. Przykładowo,
w systemie emocję złości zdefiniowano jako ruchy o dużej rozpiętości, narastające
i nasilające się. Ostatecznie użytkownik przed wysłaniem komunikatu sms dostosowywał
swój stan afektywny do ruchomej, kolorowej animacji, wyświetlanej w tle przesyłanego
komunikatu.
W systemie podczas kodowania stanów afektywnych wykorzystano zarówno
podejście subiektywne (interpretacja gestów), jak i obiektywne do emocji, subiektywne gesty
za pomocą ekranu dotykowego w postaci odpowiedzi nacisku, zmian trajektorii pióra.
Ponieważ rozróżnienie poszczególnych stanów afektywnych w systemie okazało się
niewystarczające. Przykładowo, stwierdzono trudności różnicowania emocji złości
i podniecenia w oparciu o profil ruchu, dlatego wprowadzono dodatkowo pomiar związany
z wykonywanym ruchem, odnoszący się do walencji emocji, tj. wymiaru przyjemność vs.
przykrość. Wydaje się, że trudności w kodowaniu emocji w tym systemie wynikały z dużej
dowolności w doborze symboli komunikacyjnych (predefiniowanych emocji w systemie),
które określone zostały na podstawie badań kwestionariuszowych komunikacji afektywnej,
a nie wynikały z biologicznych zdarzeń organizmu. Dlatego polepszenie przewidywalności
przekazu zostało ostatecznie wsparte poprzez wprowadzenie dodatkowego wymiaru
przyjemności/przykrości odniesionej do wykonywanego gestu. Mimo, że atutem systemu
było uwzględnienie ucieleśnienia emocji poprzez ich wyrażenie wyłącznie za pomocą gestu,
to wydaje się, że rozwiązanie poprzez swoje ograniczenia technologiczne, a także złożony
model kodowania emocji nie weszło do powszechnego użytku.

119
3. Kodowanie stanów afektywnych a model Russella
Zazwyczaj w rozwiązaniach mobilnych i sieciowych wykazuje się, że w systemach
tych liczba stanów afektywnych odbiorcy i nadawcy waha się granicach od 7 do 9 symboli
(patrz poz. [4]). Jednakże można zauważyć, że projektanci w niektórych systemach ignorują
czysto biologiczne sygnały, koncentrując się bardziej na subiektywnym ujęciu przeżywanych
stanów emocjonalnych, towarzyszących procesowi komunikacji, np. stan zaskoczenie-
zainteresowanie może odbiegać od klasycznej typologii emocji. Dlatego w tym miejscu
powstaje pytanie w jaki sposób teoretycznie można zwiększyć efektywność przekazu
w systemach kodowania? Na przykładzie przedstawionego wyżej systemu komunikacji
w wersji mobilnej wynika, że precyzja i efektywność procesu komunikacji poprawia się przy
wykorzystaniu bardziej złożonego modelu emocji. W szczególności w systemie wymiany
informacji afektywnej, zaproponowanego przez Fagerberg i współpracowników [5],
kodowanie emocji wsparto w dużej mierze, interpretując reakcje afektywne oparciu o model
kołowy emocji Russella [6]. Ten model emocji integruje w sobie wiele podejść teoretycznych
do emocji, w tym biologiczną koncepcję emocji, teorie atrybucji, teorie wydawania sądów,
uwzględnia również zachowania celowe. W modelu kołowym Russella emocje
interpretowane są jako kombinacja pobudzenia i przyjemności w dwuwymiarowej
przestrzeni. Na rys.1 przedstawiono graficzną reprezentację modelu Russella, który
odzwierciedla poszczególne stany afektywne. Na osi x wyróżniony jest wymiar walencji,
odpowiednio przykrości (lewa część wykresu) oraz wymiar przyjemności (prawa część
wykresu). Wymiar pobudzenia skalowany jest względem osi y i zgodnie z taką typologią brak
pobudzenia reprezentowany jest przez stany afektywne w dolnej części koła, a stany
afektywne o wysokim pobudzeniu w górnej części wykresu kołowego. Przykładowo, stan
spokoju (uspokojenie) jest wywołany przez stan średniej przyjemności oraz skrajnie niskiego
pobudzenia. Dajmy na to stan zachwytu (podniecenie) powstaje w wyniku pojawienia się
skrajnej przyjemności i silnego pobudzenia. Jak widać zatem, według modelu Russella,
zarysowuje się pewna gradacja stanów afektywnych pod względem wymiarów pobudzenia
i walencji. W ten sposób, bazując na modelu Russella, możemy rozpoznać aż 28 stanów
afektywnych.

120
Rys.1. Model afektu według Russella. Wzdłuż osi poziomej stany afektywne uszeregowano
według wymiarów przykrości (lewa część wykresu) oraz przyjemności (prawa część
wykresu). Wymiar pionowy skaluje emocje względem pobudzenia: brak pobudzenia
reprezentowany jest przez stany afektywne w dolnej części koła, a stany afektywne
o wysokim pobudzeniu w górnej części wykresu kołowego. Źródło: opracowanie na
podstawie Russella [3].
Model afektu wg Russella [3] potwierdzono w licznych badaniach psychologicznych.
Przykładowo, badania międzykulturowe modelu wykazały między innymi, że założona
kategoryzacja stanów afektywnych ma zasięg ogólnoeuropejski – badania przeprowadzono
między innymi w Polsce, Anglii, Estonii, Grecji [6]. Co więcej, liczne badania z obszaru
badań mózgu, np. neuroobrazowanie fMRI (czynnościowe obrazowanie aktywności
neuronalnej mózgu za pomocą rezonansu magnetycznego), pokazują, że model Russella
ma też sens biologiczny, gdyż przetwarzanie informacji afektywnej na wymiarze
przyjemność/przykrość można bezpośrednio odnieść do działania mózgowego układu
nagrody, natomiast pobudzenie przy przetwarzaniu emocji do aktywności rozległego układu
pobudzenia w mózgu [7]. Badania pokazujące, że model afektu Russella można powiązać
z aktywnością neuronalną mózgu sugerują, że w systemie komunikacji mobilnej powinno się
uwzględnić w większym stopniu biologiczną reprezentację emocji, mierząc obiektywnie
komponenty fizjologicznego pobudzenia i walencji danej emocji. Bazując na takiej
reprezentacji emocji i założeniu ich ucieleśnienia możemy przyjąć, że w systemie mobilnym
komunikacja afektywna będzie cechowała się stosunkowo wysoką redundancją,
jednocześnie zostawiając pewien margines zmiany znaczenia emocji przy ich subiektywnym
wyrażaniu poprzez gest, które będą zależeć od różnic indywidualnych, zmieniającego się
kontekstu kulturowego i środowiskowego.

121
4. Wybór metody
Na podstawie analizy systemów zaproponowano system komunikowania się oparty
o model interakcyjny emocji, który uwzględnia subiektywne komponenty emocji przez
specyficzne, indywidualne „ucieleśnione” wzorce odpowiedzi motorycznych, (tj. indywidualny
wzorzec gestów związanych z ruchem/dotykiem nadaje ostateczne znaczenie
przekazywanej informacji afektywnej), obiektywizuje odpowiedzi afektywne, odnosząc się do
poszczególnych komponent fizjologicznych ruchu/dotyku w odpowiedzi na daną emocję,
tj. pobudzenia oraz stanów przyjemności lub przykrości. W systemie uwzględniono więc
założenia modelu emocji Russella przyjmując, że reakcje afektywne będą kodowane jako
specyficzna kombinacja pobudzenia i walencji emocji.
W celu weryfikacji empirycznej modelu komunikacji afektywnej przeprowadzono
badanie laboratoryjne. Założono, że badani rozpoznawać będą emocje ekspresji mimicznych
za pomocą gestów wykonywanych ruchem palców na ekranie dotykowym w telefonie
smartfon. Przyjęto, że badani będą rozpoznawać gestem siedem stanów afektywnych: sześć
podstawowych emocji (lęk, złość, radość, zaskoczenie, wstręt i smutek) oraz brak emocji
(twarz o ekspresji neutralnej).
5. Metoda
Osoby badane i materiał bodźcowy. W badaniach udział wzięło łącznie udział wzięło
134 studentów Uniwersytetu SWPS. Badanie zostało zaakceptowane przez Komisję Etyczną
Uniwersytetu SWPS. W eksperymencie z użyciem smartfona Sony Ericsson Xperia S udział
wzięło 70 osób badanych (wyniki jednej osoby odrzucono), natomiast w przypadku telefonu
Samsung Galaxy SIII udział wzięło 64 osoby badane (wyniki dwóch osób odrzucono).
Twarze zaczerpnięto z zestawu KDEF (Karolinska Directed Emotional Faces), zawierającego
łącznie 490 zdjęć, które wyrażały sześć podstawowych emocji (lęk, złość, wstręt, radość,
smutek, zaskoczenie) oraz zdjęcia twarzy o treści neutralnej [8]. Przykładowe zdjęcia
z zestawu przedstawiono na rys. 2. Z zestawu ostatecznie wyselekcjonowano 14 zdjęć
(7 kobiet i 7 mężczyzn), wybierając ekspresje mimiczne, które cechowały się najwyższą
intensywnością emocji oraz wartością pobudzenia odczuwaną przez badanych. W wyborze
zdjęć kierowano się wartościami zmierzonymi intensywności i pobudzenia dostępnymi w poz.
[11] Bodźce prezentowano na monitorze LCD IYama ProLite 22 cale. W przypadku
pomiarów w telefonie Samsung wystąpiły problemy techniczne związane z obsługą
sprzętową urządzenia (uzyskano jedynie pomiar walencji emocji), dlatego w dalszej części
skupiono się jedynie na analizie wyników smartfona Sony Ericsson Xperia S.

122
Rys. 2 Przykładowe zdjęcia z zestawu twarzy afektywnych KDEF badaczy z Instytutu
Karolinska, Szwecja. Źródło: Goeleven, De Raedt, Leyman i Verschuere ([8])
5.1 Procedura badawcza
Podczas eksperymentu badani mieli za zadanie rozpoznawać emocje wyrażane
przez ekspresje mimiczne za pomocą gestów palcem wskazującym. Odpowiedzi motoryczne
badanych rejestrowane były za pomocą ekranu dotykowego smartfonu (patrz rys. 3). Ekran
dotykowy trzymany był w dłoni w pozycji horyzontalnej, tj. ruch pociągnięcia palcem
wskazującym wykonywany był względem dłuższej osi ekranu. W każdej próbie z chwilą
pojawienia się zdjęcia z określoną ekspresją osobę badaną proszono o wyrażenie treści
emocji za pomocą dowolnego ruchem palca wskazującego, bez odrywania,
w nieograniczonym czasie. Po udzieleniu odpowiedzi badanym wyświetlano komunikat
zachęty i następnie proszono o naciśniecie klawisza w celu przejścia do następnej próby.
W tym czasie eksperymentator wyświetlał na ekranie komputera zdjęcie z kolejną ekspresją.
Przed przystąpieniem do eksperymentu badanym udzielano dokładnych instrukcji co do
wykonania zadania. Łącznie w badaniu każda osoba wykonywała 16 prób rozpoznania
emocji, obejmujących dwie próby treningowe oraz następne 14 prób eksperymentalnych,
odnoszących się odpowiednio do 7 stanów afektywnych (na każdą emocję przypadały dwa
zdjęcia). Próby o numerach od 3 do 16 były randomizowane. Badanie trwało około 5–10
minut.

123
Rys.3. Stanowisko laboratoryjne do pomiaru odpowiedzi afektywno–motorycznych. Pomiar
reakcji motorycznej odbywał się za pomocą specjalnie dedykowanej aplikacji mobilnej
w systemie Android napisanej w języku Java, za pomocą której rejestrowano siłę
nacisku, trajektorię ruchu, zmiany kierunku ruchu oraz przyśpieszenie.
W behawioralnym pomiarze każdej z siedmiu emocji zakładano, że zmiany na
wymiarze pobudzenia i przyjemności i przykrości będą wpływać na wykonywane gesty.
Wymiary pobudzenia i walencji operacjonalizowano w następujący sposób. Założono,
że pobudzenie związane z emocją będzie wpływać na wykonywany gest i będzie
rejestrowane jako: (1) siła nacisku mierzona w postaci pola kontaktu palca z ekranem
dotykowym (pomiar w punkcie początkowym, końcowym oraz pomiar uśrednionych
wartości); (2) przyśpieszenie: pomiar wartości średniej, chwilowej na początku i na
końcu ruchu (pomiary wartości średniej dotyczył hamowania). W przypadku wymiaru
przyjemności/przykrości emocji założono, że wpływ walencji na wykonywane gesty
będzie obserwowalny: (1) rozpiętość ruchu jako liczba zmian kierunku ruchu; (2) na
poziomie przestrzennych zmian w trajektorii ruchu. Wyświetlane na ekranie komputera
zdjęcia pochodziły z zestawu twarzy afektywnych KDEF [8].
6. Wyniki badań
6.1 Analiza wpływu komponenty pobudzenia emocji na wykonywany gest
W pierwszej części empirycznej weryfikacji modelu komunikacji afektywnej
przystąpiono do analizy pomiarów wpływu pobudzenia związanego z emocjami na
wykonywane gesty, uwzględniając siłę nacisku. Analiza wariancji ANOVA dla telefonu Sony
Xperia wykazała istotny efekt w przypadku wartości początkowej siły nacisku w funkcji
emocji, zaś dla wartości końcowej oraz średniej nacisku efekt ten był nieistotny.
W szczególności wykazano efekt główny emocji na wartość początkowego nacisku,
F(6, 408) = 2,33, p < 0,05. Płeć osoby na zdjęciu nie miała wpływu na nacisk, jak również nie
stwierdzono interakcji płci z wartością nacisku, F < 1. Wyniki średniej wartości początkowego
nacisku dla danych emocji przedstawiono na rys. 4.

124
Rys.4 Początkowy nacisk wywierany na ekran dotykowy w funkcji rozpoznawanej emocji.
Telefon dotykowy Sony Ericsson Xperia S. Na osi x uszeregowano emocje pod względem
pobudzenia, posługując się modelem Russella, począwszy od najsłabiej pobudzającej emocji
(neutralna) do najsilniej pobudzającej emocji (wstręt).
Wyniki analizy wskazywały, że pobudzenie związane z emocjami istotnie wpływało na
wykonywane gesty. Ażeby określić związki nacisku z poszczególnymi emocjami,
przeprowadzono analizę trendu i test porównań wielokrotnych. Stwierdzono obecność trendu
liniowego w funkcji emocji, F(1,68) = 7,71; p < 0,05, który sugerował, że początkowy nacisk
w kontekście wykonywanego ruchu maleje wraz z wartością pobudzenia przypisywanego
danej emocji wg modelu Russella. Testy Tukeya porównań wielokrotnych (p < 0,05)
wykazały, że emocja neutralna była istotnie różnicowana na poziomie początkowego nacisku
w stosunku do odpowiedzi przy emocjach złości i wstrętu. Ponadto zaskoczenie cechowało
się wyższym wpływem na nacisk w stosunku do emocji złości i wstrętu. Zatem nacisk
początkowy może odzwierciedlać stan użytkownika związany z przeżywaną emocją. Dlatego
sugeruje się, ażeby wartość nacisku początkowego była kodowana jako diagnostyczna dla
emocji. Uzyskana zależność ma również sens empiryczny, ponieważ sugeruje, że przy silniej
pobudzających emocjach energia może przenosić się na dalsze fazy wykonywanego gestu,
natomiast przy słabiej pobudzających emocjach mamy do czynienia z większą
bezwładnością ruchu, przypadającą na początkową fazę trwania gestu.
W dalszej części badano wpływ pobudzenia związanego z emocją na przyśpieszenie
ruchu. Analiza wariancji nie wykazała żadnych istotnych różnic w stosunku dla oczekiwanych
hipotez. Mimo, że w przypadku telefonu Sony Xperia nie uzyskano żadnych istotnych
efektów, to załączone wyniki mogą w pewnej mierze potwierdzać poprzednią tezę, że
pobudzenie afektywne moduluje wykonywany gest. Na rys. 5 można dostrzec, że wraz ze
wzrostem pobudzenia rośnie hamowanie wykonywanego gestu, co sugeruje, że w pewnej
mierze inhibicja gestu (powstrzymywanie ruchu wskutek ograniczonej przestrzeni ekranu)
jest modulowane w proporcjonalny sposób do pobudzenia związanego z daną emocją.
Jednakże sugeruje się przeprowadzenie dalszych badań w celu ewentualnego potwierdzenia

125
tej hipotezy (np. zwiększenie próby badawczej).
Rys.5 Przyśpieszenie w funkcji rozpoznawanej emocji. Telefon dotykowy Sony Ericsson
Xperia S. Na osi x uszeregowano emocje pod względem pobudzenia, posługując się
modelem Russella, począwszy od najsłabiej pobudzającej emocji (smutek) do najsilniej
pobudzającej emocji (wstręt).
6.2 Analiza wpływu walencji emocji na wykonywany gest
W modelu komunikacji afektywnej przyjęto, że wymiar przyjemności/przykrości może
być odniesiony do zmian ruchu podczas wykonywania gestu. Dla uproszczenia analiz stany
przyjemności/przykrości traktowano jako jednorodny wymiar, tzw. walencji emocji, która
stopniowała emocje od stanu najbardziej przyjemnej do najbardziej nieprzyjemnej.
W przypadku smartfonu Sony Experia pojawił się istotny wpływ walencji na wykonywane
gesty. W szczególności analiza ANOVA wykazała wpływ wartości walencji emocji na zmiany
kierunku ruchu. Wystąpił efekt główny emocji na trajektorię, F(5,01, 341,2) = 3,61; p < 0,01.
Uśrednione wartości liczby zmian kierunków przedstawiono na rys. 6. Wykryto istotne trendy
sześcienne oraz wyższych rzędów, ale na podstawie ich przebiegu trudno jest interpretować
globalnie wpływ znaku walencji na wykonywany gest. Wyniki pokazują, że maksymalne
zmiany osiągane są przy prezentacji zdjęcia z ekspresją neutralną. W szczególności test
Tukeya porównań wielokrotnych (p < 0,05) wykazał, że w przypadku neutralnej ekspresji
mimicznej wykonywano istotnie największą liczbę zmian w trajektorii ruchu, gdyż liczba ta
różniła się od pozostałych emocji (w przypadku różnicy z emocją zaskoczeniem różnica była
na poziomie p < 0,01). Wyniki zmian ruchu pokazują, że emocje istotnie wpływają na
wykonywane gesty.

126
Rys.6 Liczba zmian kierunku ruchu w funkcji emocji. Badania dla telefonu Sony Ericsson Xperia S. Na osi x uszeregowano emocje pod względem walencji, posługując się modelem Russella, począwszy od emocji o największym ładunku przyjemności (radości) do najbardziej nieprzyjemniej emocji (smutek). W kolejnym kroku przebadano wpływ wymiaru walencji emocji na przestrzenne zmiany trajektorii ruchu. Na rysunkach rys.7 przedstawiono uśrednione przestrzennie trajektorie wykonywanych gestów dla przesunięcia wzdłuż osi x i y.
Rys. 7 Rozkłady przestrzenne uśrednionych trajektorii ruchu dla telefonów dotykowych Sony
Ericsson Xperia S. Analiza jakościowa pokazuje, że oś Y można potraktować jako
diagnostyczną dla walencji stanów afektywnych. Przyjęto uszeregowanie pod względem
walencji od stanu najbardziej przyjemnej do najbardziej nieprzyjemnej emocji w następujący
sposób: radość, zaskoczenie, neutralny stan, lęk, złość wstręt, smutek.
Analizując rys.7 względem osi y można dostrzec, że walencja stanów dla telefonu
Sony przyjmuje zbliżony porządek do przewidywanego przez model Russella, ponieważ
przesunięcia można uszeregować od stanu prawie maksymalnej przyjemności (zaskoczenie)
do stanu maksymalnej przykrości (smutek, wstręt). Można zaobserwować zatem, że oś
pionowa ekranu pozwala różnicować emocje o skrajnych wartościach walencji – jednakże

127
nie ma jednak tutaj wyraźnego zróżnicowania emocji. Podsumowując, obserwacja takich
wzorców zachowań pozwala wyciągnąć wniosek, że im silniej awersyjna emocja tym
przesunięcia trajektorii względem osi y mogą być większe. Jednocześnie takich
systematycznych wzorców przesunięć trajektorii nie zaobserwowano dla osi x.
Ponieważ ocena jakościowa sugerowała wrażliwość trajektorii na znak emocji analizie
wariancji poddano przesunięcia względem osi y, oczekując, że walencja emocji będzie miała
wpływ na wyrażane gesty ruchu. W przypadku telefonu Sony Xperia analiza wariancji
wykazała efekt główny, F(6, 408) = 24,23; p < 0,0001, co sugerowało, że walencja może
mieć wpływ na wykonywane gesty. Test Tukeya porównań wielokrotnych (p < 0,05) wykazał,
że badani w kontekście wykonywanych gestów istotnie różnicowali emocję zaskoczenia
(wysoka przyjemność) oraz wstrętu (najbardziej nieprzyjemny stan) względem pozostałych
emocji. Uzyskane wyniki sugerują, że uśrednione przesunięcia względem osi mogłaby stać
się znacznikiem wymiaru przyjemność/przykrość emocji. Niemniej, ażeby potwierdzić
w całości tę hipotezę, należałoby zwiększyć liczbę badanych, ponadto dobrać do badań
urządzenia o różnych wymiarach ekranu dotykowego oraz kontrolować podczas pomiaru
położenie ekranu dotykowego na wymiarze horyzontalny vs. wertykalny podczas
wykonywanych gestów. Konkludując, wydaje się jednak, że zaproponowane uszeregowanie
emocji może być „ucieleśnione” za pomocą gestu i analiza przestrzenna uśrednionych
trajektorii ruchu może być wykorzystana jako informacja diagnostyczna dla wymiaru
przyjemność/przykrość emocji, odczuwanych przez użytkowników.
7. Wnioski
W ramach naszego projektu chcieliśmy sprawdzić, czy możną wykryć stany
afektywne użytkowników, analizując dynamikę i sposób wykonywania gestów, mierzonych za
pomocą ekranu dotykowego smartfona. W szczególności interesowała nas odpowiedź na
pytanie, czy gesty wykonywane w specyficzny sposób na ekranie smartfona mogą
odzwierciedlać przeżywane emocje, bazując na modelu ucieleśnienia emocji, w którym
przyjmuje się, że przeżywane emocje przez człowieka będą wiązać się z określonym
poziomem pobudzenia organizmu oraz znakiem (walencją) emocji [3]. Wyniki naszych badań
dostarczają pozytywnej odpowiedzi na to pytanie. Indywidualne wzorce motoryczne
odpowiedzi nadają znaczenie przekazywanej informacji, a w trakcie komunikacji stają się
obiektywnym wyznacznikiem emocji, zwierających komponentę fizjologiczną na poziomie
ruchu/dotyku. W ramach badań wykryliśmy charakterystyczne wzorce gestów, które istotnie
różnicują emocje odczuwane przez użytkowników urządzeń mobilnych. Wyniki wykazały, że
szczególne znaczenie dla diagnostyki stanów afektywnych mogą mieć parametry związane
z początkową siłą nacisku, rozpiętością ruchu oraz przesunięcia trajektorii ruchu. Parametry
te mogą być bezpośrednio zaimplementowane w algorytmach urządzeń, rozpoznających
emocje użytkownika. Uważamy, że to względnie proste rozwiązanie technologiczne,
w przyszłości, pozwoli na lepszą komunikację między użytkownikami, oraz użytkownikiem
a urządzeniem, a także przyczyni się do wzbogacenia analizy i projektowania typu User
Experience. Co więcej, sądzimy, że dalsze badania ucieleśnienia emocji poprzez gesty
w interfejsach dotykowych pozwolą przybliżyć nas do stworzenia systemów komunikacji
mobilnej, który zapewnią użytkownikom jeszcze bardziej wiarygodną wymianę
i rozpoznawanie uczuć, tak jak to się dzieje w naturalnej rozmowie.

128
8. Podziękowania
Projekt finansowany w ramach Dolnośląskiego Bonu na Innowacje (Wrocławskie Centrum
Transferu Technologii Politechniki Wrocławskiej) oraz badań statutowych
BST/WROC/2015/A/5 (Uniwersytet SWPS Humanistycznospołeczny, II Wydział Psychologii
we Wrocławiu).
Literatura
[1] eMarketer, Number of smartphone users worldwide from 2014 to 2019 (in millions),
2016, AP Statista
[2] PewResearchCenter, Global Attitudes survey, 2015, Q71 & Q72
[3] Russell, J. A. (2003). Core affect and the psychological construction of emotion.
Psychological review, 110(1), 145.
[4] Boehner, K., DePaula, R., Dourish, P., & Sengers, P. (2007). How emotion is made
and measured. International Journal of Human*Computer Studies, 65(4), 275–291.
[5] Fagerberg, P., Ståhl, A., & Höök, K. (2003). Designing gestures for affective input: an
analysis of shape, effort and valence. In Proceedings of the 2nd International
Conference on Mobile Ubiquitous and Multimedia (MUM 2003), Norrköping
[6] Russell, J. A., Lewicka, M., & Niit, T. (1989). A cross*cultural study of a circumplex
modelof affect. Journal of personality and social psychology, 57(5), 848.
[7] Posner, J., Russell, J. A., & Peterson, B. S. (2005). The circumplex model of affect: An
integrative approach to affective neuroscience, cognitive development, and
psychopathology. Development and psychopathology, 17(03), 715–734.
[8] Goeleven, E., De Raedt, R., Leyman, L., & Verschuere, B. (2008). The Karolinska
directed emotional faces: a validation study. Cognition and emotion, 22(6), 1094-1118.

129
Rozdział XI: Programowanie równoległe w języku Java z wykorzystaniem
biblioteki PCJ
Marek Nowicki (1), Piotr Bała (2)
(1) Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu,
ul. Chopina 12/18, 87-100 Toruń
Email: [email protected]
(2) Interdyscyplinarne Centrum Modelowania Matematycznego i Komputerowego,
Uniwersytet Warszawski, ul. Prosta 69, 00-838 Warszawa
Email: [email protected]
STRESZCZENIE
Artykuł opisuje badania nad nową wersją biblioteki PCJ (Parallel Computing in Java)
służącej do programowania równoległego w języku Java.
Biblioteka PCJ została stworzona i rozwijana w ramach pracy doktorskiej [1]. Powstała
jako implementacja rozwiązań opracowanych w wyniku badań nad nowymi metodami
programowania równoległego w języku Java z wykorzystaniem paradygmatu PGAS
(Partitioned Global Address Space). W pracy doktorskiej biblioteka została przetestowana,
a uzyskane wyniki zostały porównane z MPI (Message Passing Interface) – aktualnym
standardem używanym do tworzenia aplikacji współbieżnych w środowisku HPC
(High-performance computing).
Artykuł przedstawia historię rozwoju biblioteki PCJ wraz z jej aktualnie najnowszą
wersją 5. Biblioteka bazuje na modelu obliczeń rozproszonych PGAS, który pozwala na
łatwe rozwijanie aplikacji równoległych niezbędnych do przetwarzania dużych danych (Big
Data) czy obliczeń wielkoskalowych (HPC).
Biblioteka pozwala na pracę na komputerach wielordzeniowych, klastrach
obliczeniowych, czyli systemach posiadających wiele węzłów, z których każdy składa się
z wielu rdzeni. PCJ ukrywa przed programistą szczegóły komunikacji wewnątrz
pojedynczego węzła i pomiędzy węzłami. Biblioteka może być również wykorzystywana na
pojedynczej stacji roboczej wyposażonej w Wirtualną Maszynę Javy (JVM).
Aktualna wersja biblioteki PCJ korzysta z mechanizmów dostępnych w najnowszej
edycji języka Java jak wyrażenia lambda czy strumienie, wprowadza nowe możliwości
przesyłania danych i pozwala na łatwiejsze tworzenie rozproszonych obiektów.
ABSTRACT
The article describes research on new version of the PCJ library (Parallel Computing in
Java) for parallel programming in the Java language.
The PCJ library was created and developed in scope of doctoral dissertation [1]. The
library is the implementation of solutions developed thought research into new methods of
parallel programming in the Java language using the PGAS (Partitioned Global Address
Space) paradigm. In the dissertation, the library was benchmarked and compared to the MPI

130
(Message Passing Interface) – current standard used in the HPC (High-performance
computing) for creating concurrent applications.
Article describes history of development of the PCJ library with its current version 5.
The library is based on PGAS programming model, which allows for easy development of
parallel applications for HPC or processing Big Data.
The library can be used in the multicore computers, computing clusters, so the systems
that consist of many nodes consisting of many cores. PCJ hides the communication inside
node and between nodes. The library can be also used on a single workstation with Java
Virtual Machine (JVM).
Current version of the PCJ library uses mechanisms introduced into newest version of
the Java language, such as lambda expressions or streams, and introduces new possibilities
for transferring data and creating distributed objects.
Słowa kluczowe: Programowanie równoległe, Java, Podzielona globalna przestrzeń
adresowa, PGAS, HPC, PCJ
Keywords: Parallel programming, Java, Partitioned Global Address Space, PGAS, HPC,
PCJ
WSTĘP
W 1965 roku Gordon Moore sformułował prawo empiryczne, które mówi, że
ekonomicznie optymalna liczba tranzystorów w układzie scalonym zwiększa się w kolejnych
latach zgodnie z trendem wykładniczym [2][3]. Prawo Moore’a zostało rozszerzone na inne
parametry komputerów (np. szybkość przetwarzania).
Od 2005 roku częstotliwość zegara procesora nie zwiększa się. Jest to spowodowane
problemami z wydzielaniem temperatury i zakłóceniami z tym związanymi. Zamiast tego
zdecydowano się na zwiększenie liczby jednostek obliczeniowych, czyli procesorów i liczby
rdzeni procesora. W związku z tym coraz większą rolę zaczęło odgrywać programowanie
równoległe.
Aktualnie standardem programowania równoległego w HPC (High-performance
computing) jest MPI (Message Passing Interface). Jednak programowanie z wykorzystaniem
tego standardu jest trudne i mało wygodne, gdyż stosowane jest głównie z językami niskiego
poziomu jak C czy Fortran.
Językiem wysokiego poziomu, który jest w czołówce najczęściej wykorzystywanych
języków programowania jest Java. Java od początku swojego istnienia była zorientowana na
programowanie równoległe – warto wspomnieć chociażby klasę java.lang.Thread czy
słowo kluczowe synchronized, które istniały w języku Java od początku.
Jednak programowanie równoległe w języku Java z wykorzystaniem standardowych
mechanizmów pozwala wykorzystywać jedynie jeden węzeł obliczeniowy. Brakuje dobrych
rozwiązań do przeprowadzania obliczeń równoległych dla języka Java w środowisku
wielowęzłowym. Istnieją i są całkiem dobrze znane biblioteki-frameworki jak Hadoop czy
Spark, ale za ich pomocą rozwiązuje się głównie tylko jeden typ problemów: przeszukiwanie
dużych zbiorów danych. Niektórych problemów nie da się lub jest bardzo trudno sformułować
w modelu MapReduce, który wspomniane biblioteki wykorzystują.
W niniejszym artykule zostanie przedstawiona historia i aktualnie najnowsza wersja
biblioteki służącej do obliczeń równoległych w języku Java jaką jest PCJ w wersji 5.

131
HISTORIA ROZWOJU BIBLIOTEKI PCJ
Biblioteka PCJ została stworzona i rozwijana w ramach studiów doktoranckich i pracy
doktorskiej autora referatu [1]. Powstała ona jako implementacja rozwiązań opracowanych
w wyniku badań nad nowymi metodami programowania równoległego w języku Java
z wykorzystaniem paradygmatu PGAS (Partitioned Global Address Space).
Wersja pierwsza
Pierwsze prace nad biblioteką PCJ rozpoczęły się na przełomie września
i października 2011 roku. Wśród założeń do biblioteki było dostarczenie mechanizmów, które
pozwalałaby na uruchomienie zadań równoległych na klastrze obliczeniowym, w taki sposób,
by na każdym węźle klastra działała jedna instancja PCJ zawierająca wątek wykonujący
obliczenia. Ta pojedyncza instancja miała zawierać miejsce zwane magazynem (ang.
storage) zawierającym zmienne współdzielone (ang. shared), które mogłyby dać się
przesyłać. Przekazywanie wartości zmiennych współdzielonych miało być możliwe przez
jednokierunkowe, asynchroniczne metody: get i put, których jednym z parametrów miał być
identyfikator wątku przeciwnego. Biblioteka zawierać miała też metodę do synchronizacji
wszystkich wątków – sync.
Pierwsza, prototypowa implementacja biblioteki PCJ została ukończona w listopadzie
2011 roku. Została napisana z wykorzystaniem najnowszej w danym momencie wersji języka
i platformy Java, czyli Java SE 7.
W pierwszej wersji biblioteki PCJ zaimplementowano opisane powyżej mechanizmy,
gdzie punktem startowym obliczeń została wybrana klasa implementująca interfejs
StartPoint. Magazynem była klasa, która rozszerzała klasę StorageAbstract, która
z kolei implementowała interfejs Storage. Zmienne współdzielone w tej klasie były
oznaczane za pomocą adnotacji @Shared zawierającej jako parametr nazwę, która miała
być wykorzystywana jako parametr dla metod get i put. Nazwy klas punktu startowego
i magazynu były przekazywane do odpowiedniej metody statycznej klasy PCJ startującej
obliczenia. Obliczenia były uruchamiane na węzłach klastra według opisu zawartego w pliku
XML. Plik ten zawierał m.in. informację o menadżerze – instancji JVM, która była
odpowiedzialna za koordynację węzłów obliczeniowych (wątków wykonujących obliczenia) –
jego adresie IP i porcie, na którym nasłuchiwał oraz informacje o węzłach obliczeniowych –
również ich adresach IP oraz portach.
W dalszej pracy nad biblioteką adnotacja @Shared zyskała mechanizm jej
procesowania tak, by w trakcie kompilacji było możliwe sprawdzenie, czy wskazuje ona na
zmienną, którą da się przesłać siecią za pomocą serializacji, czyli czy klasę można rzutować
na interfejs java.io.Serializable. Dodatkowo zostało dodane sprawdzenie, czy pole
z adnotacją @Shared znajduje się w klasie implementującej interfejs Storage.
Następnie został dodany mechanizm rozgłaszania wartości zmiennej. Skorzystano ze
specjalnego typu komunikatu związanego z rozgłaszaniem wiadomości, gdzie wiadomość
rozgłaszana była jej załącznikiem. Każdy węzeł najpierw przekazywał wiadomość dalej,
a następnie rozpakowywał załącznik i wykonywał operacje wg załącznika, czyli w przypadku
rozgłaszania wartości zmiennej załącznikiem był komunikat put.
Ze względu na to, że rozgłaszanie jak i operacja put były asynchroniczne,
nieblokujące i jednostronne, a operacja synchronizacji była barierą sprawdzającą, czy
wszystkie węzły dotarły do tego samego miejsca obliczeń, nie było możliwe upewnienie się,

132
że dany węzeł obliczeniowy otrzymał nową wartość zmiennej współdzielonej. Stąd potrzebny
był mechanizm pozwalający sprawdzać, czy został otrzymany komunikat zmieniający
wartość zmiennej. W tym celu powstały metody monitor i waitFor, które odpowiednio
czyszczą licznik zmian zmiennej i zatrzymują wykonanie aktualnego wątku do momentu
wystąpienia zmiany wartości. Dodatkowo stworzono metodę pozwalającą na synchronizację
nie tylko całej grupy węzłów, ale również podzbioru węzłów obliczeniowych. Dzięki tym
zmianom możliwe było upewnienie się, że dany węzeł otrzymał i zdążył pobrać nową
wartość zmiennej współdzielonej przed kolejną zmianą jej wartości.
Kolejnym krokiem rozwoju biblioteki było dodanie możliwości tworzenia nowych grup
i dołączania do nich. W tym momencie synchronizacja podzbioru węzłów obliczeniowych nie
była konieczna i w dalszych wersjach biblioteki ta możliwość została usunięta, choć
pozostawiono możliwość synchronizacji dwóch węzłów obliczeniowych.
Na koniec prac nad PCJ1, metoda get otrzymała bliźniaczą metodę get z dodanym
nowym parametrem – FutureResponse. Nowa metoda działała w sposób nieblokujący. Po
wysłaniu żądania, utworzony obiekt FutureReponse był zapamiętywany w wewnętrznej
mapie, tak by po otrzymaniu odpowiedzi móc go wypełnić otrzymaną wartością. Dzięki temu
obiekt ten pozwalał na sprawdzenie, czy oczekiwana wartość została już zwrócona, a jeśli
nie to czekanie na tę wartość oraz zwrócenie oczekiwanej wartości.
Wersja druga
W sierpniu 2012 roku rozpoczął się proces tworzenia drugiej wersji biblioteki PCJ.
Wersja ta była krokiem milowym w rozwoju biblioteki. W tej wersji zmieniono podstawową
koncepcję tak, by na jednym węźle nie uruchamiać jednego, a wiele wątków obliczeniowych
– wątków PCJ.
Wcześniej na jednym węźle można było uruchomić wiele instancji PCJ, każdą
nasłuchującą na innym porcie, i w ten sposób można było w pełni wykorzystać dostępne
rdzenie obliczeniowe węzła, na którym obliczenia były uruchamiane. Wiązało się to
z oczywistym narzutem na pamięć (wiele instancji wirtualnej maszyny Java) czy na
komunikację (dwie instancje JVM znajdujące się na tym samym węźle przekazywały sobie
dane przez przesyłanie ich poprzez gniazda TCP).
W drugiej wersji biblioteki możliwe było przekazywanie danych przez przekazywanie
samych referencji. Wiązało się to z sytuacją, w której programy zapisane w PCJ1 mogłyby
nie działać poprawnie w PCJ2 z tego powodu, że zmienne statyczne w PCJ1 były ściśle
związane z danym węzłem obliczeniowym, podczas gdy w PCJ2 zmienne statyczne mogły
być współdzielone. Postanowiono odseparować wątki obliczeniowe w ramach jednej JVM.
Poradzono sobie z tym przez wykorzystanie osobnych ładowarek klas (ang. ClassLoader)
dla różnych wątków PCJ. Dokładniejszy opis tego mechanizmu został zawarty w rozprawie
doktorskiej autora artykułu [1].
Dalszym etapem prac było dodanie specjalnych wątków – deserializerów, których
zadaniem było zdeserializowanie otrzymanych danych, z wykorzystaniem odpowiednich
ładowarek klas, do postaci akceptowalnej przez odpowiednie wątki PCJ. Dzięki temu wątki
odpowiedzialne za odbieranie danych i przetwarzanie wiadomości zlecały najbardziej
czasochłonne operacje do innych wątków i mogły równolegle przetwarzać kolejne
wiadomości.
W wersji drugiej PCJ zmieniono również zduplikowany kod związany z pobieraniem
danych – metodę get w obu jej wariantach (blokującą i nieblokującą z obiektem
FutureResponse). Zastąpiono te metody nieblokującą metodą getFutureObject, która

133
zwolniła użytkownika biblioteki z samodzielnego tworzenia odpowiedniego obiektu Future,
gdyż metoda sama zwracała ten obiekt. Metoda get pozostała blokująca, ale w swoim
działaniu wykorzystywała metodę getFutureObject i obiekt przez tę metodę zwracany:
PCJ.getFutureObject(id, varName).get();
Kolejną ważną zmianą w PCJ2 było dodanie do metod get, getFutureObject i put
opcjonalnego argumentu będącego odwołaniem do indeksów tablicowej zmiennej
współdzielonej.
Dodatkowo dodano operacje getLocal i putLocal działające dla aktualnego wątku
obliczeń, które do magazynu wkładały referencje do istniejących obiektów w przeciwieństwie
do metod get i put, które tworzyły ich kopię.
Wersja trzecia
W listopadzie 2013 roku rozpoczęto prace nad trzecią wersją biblioteki PCJ. Nie była
ona już tak bardzo przełomowa jeśli chodzi o nowe funkcjonalności. Wśród głównych zmian
było uporządkowanie nazw metod, by lepiej odzwierciedlały wykonywane operacje (np. sync
na barrier, numNodes na threadCount, czy myNode na myId). Wykonano też pewne
operacje konserwacyjne biblioteki.
Trzecia wersja biblioteki była opisywana w doktoracie [1] a za jej pomocą stworzono
aplikacje będące częścią HPC Challenge Benchmark Suite, których implementacje
zaprezentowano na konferencji Supercomputing 2014, gdzie biblioteka PCJ uzyskała
nagrodę Most elegant solution w kategorii HPC Challenge Class 2: Most Productivity.
Wersja czwarta
Rozwój czwartej wersji biblioteki PCJ rozpoczął się w sierpniu 2014 roku zmianą nazw
pakietów wykorzystywanych klas z pl.umk.mat.pcj.** na org.pcj.**.
W wersji czwartej zrezygnowano z osobnych ładowarek klas dla różnych wątków PCJ
ze względu na problemy z wykorzystaniem bibliotek używających natywnych metod. Dana
biblioteka mogła być załadowana dokładnie raz. Kolejne ładowanie powodowało rzucenie
wyjątku podobnie jak próba korzystania z natywnych metod w wątku posiadającym inną
kopię załadowanej klasy zawierającej metody natywne, tzn. klasę załadowaną za pomocą
innej ładowarki klas. Jedyną możliwością byłoby używanie klas z metodami natywnymi
załadowanymi za pomocą systemowej ładowarki klas, co wiązałoby się z dużymi
utrudnieniami dla użytkowników biblioteki.
Dodatkowym argumentem za tą zmianą był brak możliwości całkowitego rozdzielenia
przestrzeni klas dla różnych wątków PCJ, ponieważ klasy z pakietów java.**, javax.**, sun.**
musiały być ładowane przez systemową ładowarkę klas, czyli były wspólne dla wszystkich
wątków PCJ na jednej wirtualnej maszynie Java.
W PCJ4 dodano również metodę cas (ang. compare and swap, pol. porównaj
i zamień), ale ze względu na słabą wydajność w dalszych pracach usunięto ją.
Wersja piąta
Prace nad piątą wersją biblioteki PCJ rozpoczęły się w czerwcu 2016 roku, choć już
wcześniej pewne jej elementy były rozważane. 25 czerwca 2016 roku powstała wersja alpha
piątej wersji biblioteki PCJ. Wśród głównych, chociaż niewidocznych, zmian był zmieniony
mechanizm komunikacji między węzłami dzięki czemu możliwe stało się uruchamianie zadań
na 1024 węzłach klastra (prawie 50 000 rdzeni obliczeniowych). Ponadto nowy mechanizm

134
pozwolił na przesyłanie komunikatów o rozmiarze większym niż 2GB, które w poprzednich
wersjach biblioteki powodowałyby problemy.
Tworząc piątą wersję biblioteki postanowiono zupełnie wyczyścić ją z elementów
związanych z własnymi ładowarkami klas, które w czwartej wersji zostały jedynie ukryte.
Piąta wersja przyniosła również sporo rewolucyjnych zmian w programistycznym
interfejsie aplikacji (API).
PCJ W WERSJI PIĄTEJ
W pracach nad piątą wersją biblioteki PCJ przyświecała myśl, by zmodyfikować ją
zgodnie z doświadczeniami nabytymi w trakcie tworzenia aplikacji korzystających z PCJ.
Postanowiono także wykorzystać najnowszą dostępną wersję języka i platformy Java, czyli
Java SE 8, gdyż wersja ta wprowadziła przełomowe zmiany, takie jak możliwość pisania
wyrażeń lambda, przetwarzanie strumieniowe czy domyślne metody w interfejsach.
Nazwy podstawowych metod
Pierwszym elementem, na który została zwrócona uwaga, to nazwy podstawowych
metod używanych w PCJ: get, put, broadcast, barrier. Wszystkie te metody mają ten
sam schemat nazewnictwa, ale różnie się zachowują:
get – jest synchroniczne – czeka na odpowiedź,
put – działa w sposób asynchroniczny – po wysłaniu aplikacja działa dalej, bez
pewności czy dane zostały już przetworzone przez odbiorcę,
broadcast – podobnie jak put jest asynchroniczne,
barrier – działa synchroniczne – zatrzymuje działanie i czeka na możliwość
kontynuowania pracy.
Widać, że dwie metody są asynchroniczne i dwie są synchroniczne. Rozważano dwie
możliwości zmiany nazewnictwa metod, by było ono bardziej spójne:
1. Zmiana nazwy z get na syncGet i pozostawienie put oraz broadcast bez
zmian. Do tego dodanie metod syncPut i syncBroadcast oraz get
działającego w sposób asynchroniczny.
2. Pozostawienie metody get bez zmian, ale zmiana put na asyncPut oraz
broadcast na asyncBroadcast, Do tego dodanie put i broadcast, które
działałyby w sposób synchroniczny, to znaczy, by czekały na potwierdzenie
wykonania operacji dostarczenia zmiennej, oraz użycie asyncGet zamiast
getFutureObject z PCJ4.
Z doświadczenia wydaje się, że im krótsza nazwa metody, tym częściej będzie
używana, więc opcja pierwsza, w której get działa asynchronicznie byłaby bardziej
wskazana.
Jednakże została jeszcze jedna istotna metoda: barrier. W pierwszej opcji barrier
wydaje się, że powinien działać asynchronicznie, czyli zwracać obiekt typu Future<Void>,
który można przetestować, by wiedzieć, czy inne wątki dotarły do tego miejsca
synchronizacji, a jak nie to wykonywać inne prace. To rozwiązanie jest niestety niezbyt
intuicyjne. Dla barrier w wersji asynchronicznej lepszą nazwą byłoby: asyncBarrier, ale
ten prefiks skłania do wyboru opcji drugiej, co oznaczałoby, że metoda Xxx działa
synchronicznie, a jedynie metody o nazwach asyncXxx działają asynchronicznie. Można by
zastanowić się jeszcze, czy potrzebna jest metoda asyncBarrier, ale z doświadczeń

135
własnych jak i doświadczeń innych języków opartych o paradygmat PGAS [4], taka operacja
może być użyteczna.
W efekcie wybrano drugą opcję nazewnictwa metod.
Nazwy zmiennych
Z doświadczeń z pisaniem aplikacji dla PCJ4 jak i wcześniejszych wynika, że
korzystanie z nazw zmiennych będących ciągami tekstowymi (ang. String) jest uciążliwe:
łatwo o literówkę w nazwie, aplikację korzystająca z tego typu zmiennych trudniej
refaktoryzować i utrzymywać, brakuje wsparcia zintegrowanych środowisk
programistycznych (IDE). Ponadto nie ma możliwości korzystania z wielu magazynów,
tworzenia ponownie używalnych bibliotek dla PCJ ze względu na możliwą kolizję nazw.
Z tego powodu postanowiono wykorzystać stałe typów wyliczeniowych dla nazewnictwa
nazw zmiennych. Dzięki korzystaniu z typu wyliczeniowego refaktoryzacja jest prostsza,
trudniej o pomyłkę w nazwie zmiennej a także o kolizję nazw. Zrezygnowano też z adnotacji
@Shared.
Po tej zmianie zmienna współdzielona jest rozpoznawalna nie tylko po swojej nazwie,
ale także po nazwie magazynu, z którego pochodzi.
Początkowo nazwą magazynu była pełna nazwa typu wyliczeniowego, ale to wiązało
się z przechowywaniem danych o typie zmiennej również w tym typie wyliczeniowym, co
powodowało konieczność pisania kodu analogicznego do poniższego:
public enum WspoldzielonyTypWyliczeniowy implements Shared {
/* nazwa zmiennej współdzielonej z jej typem
jako stała typu wyliczeniowego */
liczbaCalkowita(int.class),
tablicaLiczbDlugich(long[].class),
opakowanaLiczbaZmiennoprzecinkowa(Double.class);
private final Class<?> typElementu;
private WspoldzielonyTypWyliczeniowy(Class<?> typElementu) {
this.typElementu = typElementu;
}
@Override
public Class<?> type() {
return typElementu;
}
}
Skorzystanie z interfejsu Shared pozwoliło na tworzenie zmiennych współdzielonych
w locie przez utworzenie klasy implementującej interfejs Shared i zwracającej odpowiednie
wartości dla metody name, type oraz parent (domyślna metoda z interfejsu Shared
zwracająca nazwę klasy).
Taką klasę należało następnie w programie zarejestrować, by można było z niej
skorzystać. Dzięki temu możliwe było skorzystanie z więcej niż jednego magazynu.
Niestety, w tym rozwiązaniu nie było możliwe, by zmienne będące polami klasy były
jednocześnie zmiennymi współdzielonymi.
Po kolejnych kilku iteracjach związanych z nazwami zmiennych ustalono rozwiązanie,
które wydaje się być optymalne. Dodano w nim dwie adnotacje:

136
adnotację @Storage(Class<?>), którą dodaje się do typu wyliczeniowego, gdzie
parametrem jest klasa zawierająca zmienne współdzielone zgodne z nazwami
stałych typu wyliczeniowego,
adnotację @RegisterStorages(Class<? extends Enum<?>>[]), którą można
dołożyć do klasy implementującej interfejs StartPoint, by podane w parametrze
odwołania do typów wyliczeniowych zawierających nazwy zmiennych
współdzielonych przy starcie danej aplikacji były automatycznie rejestrowane.
Poniżej znajduje się przykładowy program korzystający z obu adnotacji:
@RegisterStorages(WitajSwiecie.DaneWspoldzielone.class)
public class WitajSwiecie implements StartPoint {
@Storage(WitajSwiecie.class)
enum DaneWspoldzielone {
tablica
}
private static final int[] tablica = new int[PCJ.threadCount()];
private long suma;
@Override
public void main() throws Throwable {
}
}
Jak widać od wersji PCJ5 zmienne współdzielone mogą być statyczne (wspólne dla
wszystkich wątków działających na danej JVM) oraz finalne (brak możliwości zmiany ich
wartości po zainicjowaniu). W powyższym programie występuje tylko jedna zmienna
współdzielona o nazwie tablica, natomiast pole suma jest lokalne dla każdego wątku PCJ.
Kolejność parametrów metod
W trakcie tworzenia PCJ5 usystematyzowano również kolejność parametrów dla metod
get, put oraz broadcast. W tym przypadku również rozważono różne kombinacje
kolejności parametrów wywołania tych metod. Zmian wymagała kolejność tylko metod put
i broadcast w taki sposób, by nazwa zmiennej była jak najbliżej opcjonalnego argumentu
zawierającego indeksy, tak jak ma to miejsce w metodzie get:
get(threadId, variableName, optionalIndices...)
Tworząc metodę put na podstawie metody get, jedyną pozycją, na której podaje się
nową wartość zmiennej współdzielonej jest pierwsza pozycja:
put(newValue, threadId, variableName, optionalIndices...)
Podobnie sprawa wygląda w metodzie broadcast, gdzie pozycja parametru
zawierająca nową wartość zmiennej współdzielonej została ustalona na pozycję pierwszą:
broadcast(value, variable)
Najważniejsze zmiany w PCJ5
Poniżej podsumowano najważniejsze zmiany w PCJ5, które wprowadziła ta wersja,
a których nie było dostępnych w poprzednich wersjach.
W najnowszej wersji biblioteki dodano obsługę wyjątków mogących pojawić się
w czasie przesyłania zmiennych współdzielonych. Teraz programista ma możliwość złapania
wyjątku i odpowiedniego zareagowania na niego. W poprzednich wersjach takie sytuacje nie
były obsługiwane.

137
Została dodana notyfikacja zakończenia operacji put i asynchroniczna bariera, a dla
wszelkich operacji asynchronicznych została dodana możliwość czasowego czekania na ich
zakończenie.
Stworzono możliwość obsługi wielu magazynów, dla których zmienne współdzielone
zostały zmienione z typu ciągu tekstowego na stałe typów wyliczeniowych. Dodatkowo
możliwe jest skojarzenie magazynów z klasą startową implementującą interfejs StartPoint
i dla niej automatycznie następuje ich rejestracja przy starcie aplikacji.
Ponadto tworzenie magazynów odbywa się w momencie, gdy znany jest już
identyfikator wątku i liczba wątków, co pozwala na łatwiejszą inicjalizację zmiennych
współdzielonych.
Portowanie aplikacji z PCJ4 do PCJ5
Większość pracy wymaganej przy portowaniu aplikacji do PCJ5 polega na
automatycznej lub półautomatycznej modyfikacji kodu źródłowego.
Pierwszą modyfikacją jest zamiana metody log, która już nie występuje w bibliotece
PCJ, na wywołanie metody System.out.println.
Klasy zawierające zmienne współdzielone nie rozszerzają już klasy Storage,
a zmienne współdzielone nie zawierają adnotacji @Shared, za to ich nazwy muszą znaleźć
się w typie wyliczeniowym, zaadnotowanym przez @Storage, którego parametrem jest
dawna klasa rozszerzająca klasę Storage.
Następnie w klasach używających zmiennych współdzielonych należy wykonać
zamianę parametrów, by zamiast korzystać typu String korzystać z typu wyliczeniowego.
Tę operację dość prosto można zapisać korzystając z wyrażeń regularnych.
Dodatkowo w klasie zawierającej wywołanie metody start lub deploy należy usunąć
drugi argument i dodać typ wyliczeniowy, który wskazywał na podaną klasę jako parametr
adnotacji @RegisterStorages. Trzeci argument, który stał się drugim, należy opakować
w: new NodesDescription(<argument>).
Następną zmianą jest zamiana nazwy klasy z FutureObject na
PcjFuture, z getFutureObject na asyncGet, i podobnie z getObject na get.
Kolejne zmiany to zmiana nazwy put na asyncPut i broadcast na asyncBroadcast.
Oczywiście warto prześledzić, co dzieje się w zmienianym kodzie, by jak najlepiej
wykorzystać nowe możliwości PCJ5.
PRZYKŁADOWY KOD APLIKACJI W PCJ5
W tym rozdziale zostanie przedstawiony pełen kod źródłowy prostej aplikacji
z wykorzystaniem PCJ5.
Zmiany pomiędzy PCJ4 a PCJ5
Poniżej zaprezentowano przykładowy program obliczający przybliżoną wartość liczby
π za pomocą metody całkowania (prostokątów) zapisaną z wykorzystaniem PCJ4 oraz
PCJ5. Linie z PCJ4 zostały oznaczone przez znak - (minus), natomiast linie z PCJ5 przez +
(plus). Linie wspólne dla obu wersji PCJ pozostały bez prefiksu.
-import org.pcj.FutureObject;
import org.pcj.PCJ;
+import org.pcj.PcjFuture;

138
+import org.pcj.RegisterStorages;
-import org.pcj.Shared;
import org.pcj.StartPoint;
import org.pcj.Storage;
+@RegisterStorages(DaneWspoldzielone.class)
-public class ObliczPiCalkowaniem extends Storage implements StartPoint {
+public class ObliczPiCalkowaniem implements StartPoint {
+ @Storage(ObliczPiCalkowaniem.class)
+ public enum DaneWspoldzielone {
+ suma
+ }
- @Shared
private double suma;
private double funkcjaPodCalka(double x) {
return (4.0 / (1.0 + x * x));
}
@Override
public void main() throws Throwable {
double pi = obliczWartoscPi();
if (PCJ.myId() == 0) {
System.out.format("Pi wynosi %.15f\n", pi);
}
}
private double obliczWartoscPi() {
int liczbaPunktow = 1_000_000;
double ulamek = 1.0 / (double) liczbaPunktow;
for (int i = PCJ.myId() + 1; i <= liczbaPunktow;
i += PCJ.threadCount()) {
suma = suma + funkcjaPodCalka(((double) i - 0.5) * ulamek);
}
suma = suma * ulamek;
PCJ.barrier();
if (PCJ.myId() == 0) {
- FutureObject[] dane = new FutureObject[PCJ.threadCount()];
+ PcjFuture<Double>[] dane = new PcjFuture[PCJ.threadCount()];
for (int i = 1; i < PCJ.threadCount(); ++i) {
- dane[i] = PCJ.getFutureObject(i, "suma");
+ dane[i] = PCJ.asyncGet(i, Shared.suma);
}
for (int i = 1; i < PCJ.threadCount(); ++i) {
- suma = suma + (double) dane[i].getObject();
+ suma = suma + dane[i].get();
}
}
return suma;
}
public static void main(String[] args) {
PCJ.deploy(ObliczPiCalkowaniem.class,
- ObliczPiCalkowaniem.class, "nodes.txt");
+ new NodesDescription("nodes.txt"));
}
}

139
PODSUMOWANIE
Biblioteka PCJ jest elastyczna i stosunkowo prosta w użyciu, dzięki czemu może być
bardzo szybko zaadaptowana do rozwiązania istniejących problemów, tak by wykorzystać
moc aktualnych komputerów. Wydajność aplikacji napisanych z wykorzystaniem języka Java
i PCJ jest zbliżona do wydajności aplikacji tworzonych z wykorzystaniem tradycyjnych
języków programowania. Biblioteka jest stale rozwijana i jest z sukcesem wykorzystywana do
zrównoleglania aplikacji naukowych. Wśród nich można wymienić aplikację wykorzystującą
optymalizację wieloparametryczną (algorytm genetyczny) do modelowania kontektomu
nicienia (Caenorhabditis elegans) [5], implementację przetwarzania danych grafowych
w ramach zbioru testów Graph500 [6], czy zrównoleglenie programu BLAST do szybkiego
znajdowania podobnych sekwencji DNA.
Wbrew krążącym mitom, rozwiązania w języku Java o jaki oparta jest biblioteka, mogą
być tak samo szybkie, a nawet szybsze od rozwiązań bazujących na językach niższego
poziomu jak C++. Biblioteka PCJ, dostępna jako oprogramowanie otwarte (licencja BSD) [7]
to idealne narzędzie do rozwoju aplikacji wymagających dużych obliczeń i przetwarzania
danych.
PODZIĘKOWANIA
Prace były częściowo finansowane w ramach projektu HPDCJ finansowanego przez
konsorcjum CHIST-ERA (w Polsce finansowane przez NCN: 2014/14/Z/ST6/0007).
Obliczenia zostały wykonane przy wsparciu Interdyscyplinarnego Centrum
Modelowania Matematycznego i Komputerowego (ICM) Uniwersytetu Warszawskiego
w ramach grantu obliczeniowego nr GB65-15.
LITERATURA
[1] M. Nowicki (2015). Opracowanie nowych metod programowania równoległego w Javie
w oparciu o paradygmat PGAS (Partitioned Global Address Space). Rozprawa
doktorska, Uniwersytet Warszawski, 2015 http://ssdnm.mimuw.edu.pl/pliki/prace-
studentow/st/pliki/marek-nowicki-d.pdf [Dostęp: 26.08.2016]
[2] G. Moore (1965). Cramming more components onto integrated circuits, Electronics,
Volume 38, Number 8, April 19, 1965.
[3] Prawo Moore’a – Wikipedia, wolna encyklopedia, https://pl.wikipedia.org/wiki/
Prawo_Moore’a [Dostęp: 26.08.2016]
[4] J. Mellor-Crummey, L. Adhianto, W. Scherer III i in. (2009). A new vision for Coarray
Fortran. In Proceedings of the Third Conference on Partitioned Global Address Space
Programing Models (p. 5). ACM.
[5] Ł. Górski, F. Rakowski, P. Bała (2015). Parallel Differential Evolution in the PGAS
Programming Model Implemented with PCJ Java Library. In International Conference
on Parallel Processing and Applied Mathematics (pp. 448-458). Springer International
Publishing.
[6] M. Ryczkowska, M. Nowicki, P. Bała (2016). The Performance Evaluation of the Java
Implementation of Graph500. In Parallel Processing and Applied Mathematics (pp.
221-230). Springer International Publishing.
[7] Biblioteka PCJ: http://pcj.icm.edu.pl [Dostęp: 26.08.2016]

140
Rozdział XII:
Modelowanie wycieków w sieci wodociągowej
Tomasz Boczar, Norbert Adamkiewicz
Politechnika Opolska, ul. Prószkowska 75, 45-758 Opole
Email: [email protected]; [email protected]
STRESZCZENIE
W artykule przedstawiono wyniki dotychczasowych prac prowadzonych w ramach
projektu naukowo-badawczego p.t. Innowacyjne algorytmy do diagnostyki wycieków w
infrastrukturze wodociągowej, współfinansowanego ze środków Narodowego Centrum
Badań i Rozwoju, realizowanego przez Politechnikę Opolską przy współpracy z Miejskimi
Wodociągami i Kanalizacją Kędzierzyn-Koźle. Ogólnym celem projektu jest opracowanie
zestawu metodologii i bibliotek skryptowych, umożliwiających stworzenie systemu
monitorującego i diagnozującego infrastrukturę wodociągową. W artykule przedstawiono
metodykę prac i przykładowe wyniki symulacji komputerowych, w szczególności
zaprezentowano symulacje wycieków w wybranych fragmentach sieci.
ABSTRACT
The article presents results of works carried out within the research project
“Innovative algorithms for diagnosis of leakage in water infrastructure” which is co-financed
by the National Centre for Research and Development, and realized by the Opole University
of Technology in cooperation with the city's local water supply company Miejskie Wodociągi
i Kanalizacja Kedzierzyn-Kozle. The overall objective of the project is to develop a set of
methodology and scripting libraries that enable the creation of system for monitoring and
diagnosing of the water supply infrastructure. This paper presents methodology of works and
example results of computer simulations, in particular simulations of leaks in selected parts
of the network are presented.
Słowa kluczowe: sieć wodociągowa, detekcja wycieków, modelowanie przepływów
Keywords: water supply network, leakage detection, flow modeling
1. WSTĘP
Sieci wodociągowe są jednym z podstawowych składników infrastruktury technicznej
miast i osiedli. Konieczność ograniczenia kosztów ich eksploatacji, w szczególności
spowodowanych stratami wody, powoduje ciągłą potrzebę rozwijania nowych metod
wspomagania monitorowania i diagnozowania tych obiektów. Najczęściej występującymi
uszkodzeniami infrastruktury wodociągowej poza rozszerzeniami i zwężeniami przekroju rur,
osadami powodującymi zmianę chropowatości powierzchni itp., są pęknięcia powodujące
wycieki wody. Niestety tylko część z nich manifestuje się wypływem wody na powierzchnię
gruntu, pozostała część jest niewidoczna i trudna do zlokalizowania. Problem narasta na
obszarach tych miast, gdzie na skutek prowadzonej eksploatacji złóż np. węgla czy wapnia,
znajdujących się pod miastem, występowanie awarii jest częstsze i będzie odczuwalne

141
jeszcze przez długi czas po zaprzestaniu wydobycia. Dotychczasowe metody lokalizacji
awarii w sieciach wodociągowych wykorzystują urządzenia nasłuchowe, jednak w przypadku
coraz powszechniej stosowanych rur PCV i PE metody te są mniej skuteczne. Dlatego
istnieje potrzeba budowy narzędzia sygnalizującego pojawienie się i lokalizację miejsca
wystąpienia awarii.
W rozpatrywanym obszarze sieci wodociągowych wszelkie decyzje strategiczne
podejmowane są po gruntownej analizie możliwych do wystąpienia okoliczności, natomiast
wszystkie zdarzenia związane z wypływami, wyciekami i innymi awariami niejednokrotnie
muszą być podejmowane natychmiast, co jest szczególnie ważne w przypadku podejrzenia
skażenia wody pitnej. W chwili obecnej w wielu instalacjach wykrywanie wycieków ogranicza
się do telefonicznego przyjmowania zgłoszeń, bez udziału aktywnego wykrywania wycieków
potwierdzonego pomiarami. Przy uwzględnieniu, że wypływ wody jest zależy od wartości
ciśnienia i powierzchni otworu w nieszczelnym rurociągu, można obliczyć ile wody wypłynie
w określonym czasie. Przykładowo: przy ciśnieniu wody 5 bar, powierzchni otworu 0,5 mm2
w miesiącu wypłynie 15,8 m3 wody [1,2]. Straty będą rosły proporcjonalnie, a zatem szybka
detekcja i lokalizacja uszkodzenia jest kluczowa w celu osiągnięcia mierzalnych efektów.
Zaproponowane rozwiązania wykorzystują innowacyjne algorytmy przetwarzania,
estymacji, optymalizacji i predykcji danych, przez co umożliwiają:
• Wykonywanie symulacji awarii w sieci wodociągowej, w tym wypływów i wycieków wody.
• Wspomaganie procesu detekcji i lokalizacji wycieków.
• Wspomaganie decyzji o modernizacji przestarzałych (uszkodzonych) fragmentów sieci.
• Predykcję wielkości poboru wody na podstawie symulacji przeprowadzanej z
wykorzystaniem danych on-line zrejestrowanych przez urządzenia pomiarowe
zainstalowane w rozpatrywanej infrastrukturze wodociągowej.
Opisywane w literaturze wyniki dotyczące symulowania sieci wodociągowych bazują
na szacunkach teoretycznych i koncentrują się głównie na eksperckiej analizie sytuacji
ekstremalnych, mogących zaistnieć podczas eksploatacji sieci [3-4]. Komputerowe modele
symulacyjne umożliwiają również wykrywanie tzw. wycieków niezgłoszonych, które mogą
stanowić nawet do 60% wszystkich wycieków [2]. Precyzyjnie zaprojektowany model
symulacyjny wykorzystujący wyniki pomiarów przeprowadzonych w warunkach
przemysłowych przekłada się bezpośrednio na korzyści ekonomiczne oraz eksploatacyjne.
Może on znacznie ułatwić podejmowanie strategicznych decyzji dokonywanych dotychczas
przez ekspertów, kierujących się głównie intuicją dotyczącą lokalizacji danej awarii, którą
potwierdza się wykonaniem szeregu pomiarów za pomocą metod osłuchowych (elektro-
akustycznych) lub termowizyjnych. W zaproponowanym rozwiązaniu proces detekcji i
lokalizacji wycieków wspomagany jest nowoczesnymi rozwiązaniami m.in. teorii ewolucyjnej,
natomiast wielokryterialna optymalizacja parametrów modelu sieci wodociągowej odbywa się
z zastosowaniem m.in. algorytmów genetycznych i logiki rozmytej.
W niniejszym artykule przedstawiono problematykę badanego zagadnienia,
metodologię prowadzonych prac badawczych oraz rezultaty proces strojenia i optymalizacji
modelu symulacyjnego.
2. PROBLEMATYKA ZAGADNIENIA
Na rynku dostępne są obecnie następujące urządzenia i systemy wykorzystywane do
monitoringu i diagnozy zagrożeń występujących w sieciach wodociągowych:
system SCADA bazujący na wiedzy eksperckiej,

142
diagnostyka osłuchowa (geofony, stetofony, korelatory) związana z akustycznym
pomiarem do wykrywania wycieków,
lokalizacja wycieku przy pomocy gazu,
akustyczne stacjonarne (radiowe) i przenośne loggery szumu z korelatorem,
loggery ciśnienia wody w rurociągu,
elektro-akustyczny pomiar wykrywania wycieków,
kamera termograficzna,
detekcja wycieku bazująca na modelu symulacyjnym sieci wodociągowej.
Rozpatrywana w artykule tematyka dotyczy metody detekcji i lokalizacji wycieków
bazującej na modelu symulacyjnym sieci wodociągowej. Na rynku istnieje obecnie niewiele
produktów wykorzystujących metody symulacyjne. Produkty dostępne na rynku krajowym
mają ograniczoną funkcjonalność, często nie posiadają modelu symulacyjnego, nie
uniemożliwiają zautomatyzowanej adaptacji systemu do bieżącej sytuacji, przez co ich
efektywność w diagnostyce wycieków jest niska. Procedura wdrożenia produktu polega na
utworzeniu modelu symulacyjnego (w drodze digitalizacji lub bezpośrednio z systemu GIS
klienta) i optymalizacji parametrów powstałego modelu. Istnieje możliwość zakupu
dodatkowych modułów umożliwiających m.in.: symulację bieżącego dnia i predykcję danych,
wykonanie precyzyjnej kalibracji systemu i detekcji wycieków za pomocą metody
Minimalnego Nocnego Przepływu lub Metodą Zintegrowanego Pomiaru Przepływu.
Rozwiązania te są rzadko stosowane, m.in. z powodu wysokich kosztów zakupu/wdrożenia
oraz utrzymania tych systemów. Proces wdrożeniowy przebiega płynniej w zakładach
wyposażonych w zaktualizowany system GIS, dysponujących odpowiednio przeszkoloną
kadrą administratorów sytemu. Detekcja wycieku stanowi w tych systemach zwykle tylko
jeden z elementów, zwłaszcza w sytuacjach, gdy są one stosowane w rozbudowanych i
rozległych sieciach jako narzędzia wspomagające zarządzaniem całą infrastrukturą
wodociągową.
Tematyka dotycząca tworzenia modeli symulacyjnych opisywana jest szeroko w
dostępnej literaturze [5-23] jednak oferowany przez autorów niski poziom szczegółowości i
precyzji wykonania tych modeli uniemożliwia wykonywanie na ich podstawie analiz
zmierzających do detekcji podstawowych awarii, jak np. „wypływy niezgłoszone”. Ponadto
opublikowane wyniki badań są niepełne i szczątkowe, opisują zwykle jeden wybrany element
sieci, bez odniesienia go do pozostałych parametrów, nie zawierają opisu warunków i reżimu
metrologicznego, w jakich zostały wykonane pomiary i symulacje, obejmują zazwyczaj tylko
szkielet sieci, stanowią duże przybliżenie warunków rzeczywistych i są mało precyzyjne.
Można na tej podstawie jedynie stwierdzić, że wykonano badania podstawowe, a ich wyniki
pozwalają na przeprowadzenie dalszy badań przemysłowych. Powyższe stanowiło
motywację do wykonania prac badawczych, opisywanych w niniejszym artykule.
3. METODOLOGIA BADAWCZA
W ramach prac sformułowano wytyczne do tworzenia modeli symulacyjnych oraz
powstał wzorcowy model opisujący dystrybucyjne sieci wodociągowe, który stanowi szkielet
do budowy dowolnego modelu symulacyjnego dla dowolnej sieci wodociągowej. Aby
osiągnąć założone cele wykonano identyfikację wszystkich możliwych parametrów sieci
wodociągowej, a następnie przeprowadzono analizę, które z nich są konieczne, a które
wystarczające dla prawidłowego działania modelu symulacyjnego. Opracowany model
symulacyjny uwzględnia szereg parametrów sieci wodociągowej, w tym m.in.: szorstkość rur,

143
prędkość przepływu wody, stałe wycieki i nieszczelności spowodowane np. pęknięciem rury,
zależność korelacyjna względem wartości ciśnienia, wiek i rodzaj materiału, z jakiego są
wykonane rury, wysokość względna słupa wody, reguły czasowe pompowni i przepompowni,
emulacja falowników, hydroforni. W tym celu niezbędne było wykonanie inwentaryzacji sieci
wodociągowej i opracowanie mapy terenu, na którym zainstalowana jest infrastruktura
wodociągowa. Bazując na wynikach inwentaryzacji badanej infrastruktury określono
strategiczne punkty pomiarowe, w których zamontowano urządzenia rejestrujące wartości
wybranych parametrów sieci wodociągowej.
W ramach prac opracowano również metodologię pomiaru, akwizycji i cyfrowej
transmisji między-aplikacyjnej wartości parametrów sieci wodociągowej. Urządzenia
zamontowano na rurociągach sieci wodociągowej tworząc tzw. punkty pomiarowe. W skład
punktu pomiarowego wchodzi: zasilany bateryjnie przepływomierz elektromagnetyczny (np.
kołnierzowy/sztychowy), przetwornik ciśnienia, zasilany bateryjnie rejestrator parametrów
sieci wodociągowej z transmisją danych pomiarowych w technologii GSM/GPRS/SMS,
słupek telemetryczny z wyposażeniem dodatkowym i oprogramowanie konfiguracyjno –
komunikacyjne. Pomiary odbywają się w zdefiniowanych punktach pomiarowych regularnie
przez okres 24 miesięcy, przy czym wykonywane są w warunkach przemysłowych, czyli
podczas normalnego działania sieci wodociągowej z uwzględnieniem wszelkich zakłóceń,
jakie mogą w tym czasie wystąpić. System pomiarowy pracuje samodzielnie i stabilnie w
każdych warunkach pogodowych, które również są rejestrowane. Dane pomiarowe są
przesyłane drogą radiową lub przewodem i archiwizowane na serwerach w dyspozytorni, a
następnie udostępniane przez Internet członkom zespołu badawczego do dalszych
zastosowań.
W wyniku realizacji zadań powstają zestawy bibliotek skryptowych (programowych),
wykorzystujące opracowane algorytmy estymacji, optymalizacji, predykcji i decyzyjne oraz
zestaw baz reguł i zależności, które w sformalizowany sposób (za pomocą wyrażeń
logicznych/algebraicznych) opisują zachowanie sieci w długim horyzoncie czasowym.
Biblioteki te są zagregowane w całościowy system diagnozujący i lokalizujący wycieki wody z
sieci wodociągowej. Decyzja diagnostyczna, dotycząca wystąpienia i lokalizacji wycieku
opiera się m.in. na wynikach pomiarów wielkości ciśnienia i przepływu wody w określonych
gałęziach struktury wodociągowej. Rezultaty symulacji i pomiarów są archiwizowane w
postaci baz danych.
4. OPTYMALIZACJA MODELU SYMULACYJNEGO
W zaproponowanym rozwiązaniu dokonano integracji środowiska symulacyjnego sieć
wodociągową EPANET ze środowiskiem programistycznym MATLAB umożliwiającym
szeroko pojęte przetwarzanie danych.
Na rys.1 przedstawiono etapy działań, które wykonywano w trakcie realizacji
zamierzonych celów.

144
Rys.1. Etapy realizacji prac badawczych
W rezultacie prac wykonanych w ramach etapu 1 (rys.1) powstał model sieci
wodociągowej, której schemat szkieletu przedstawiono na rys. 2. Łączna długość sieci
wynosi ok. 153 km, a sieć zasila ok. 64 tys. mieszkańców. Średnice rurociągów wynoszą do
500 mm. Średnia produkcja w poszczególnych lokalizacjach sieci to:
Produkcja SUW (pkt.1 rys.2): 930.000 m3/rok
Produkcja ZUW(pkt.2 rys.2): 1.929.000 m3/rok
Pobór Sławięcice: (pkt.4 rys.2) 92.000 m3/rok
Pobór Cisowa(pkt.3 rys.2): 68.000 m3/rok
Rys.2. Schemat szkieletu sieci wodociągowej w programie EPANET
Opracowany w ramach realizacji zadań model symulacyjny sieci wodociągowej
posiada więcej możliwości, niż ma to miejsce w standardowym środowisku takim jak np.
EPANET [24]. Przykładowo: przypisanie grupie elementów jednej wartości danego
parametru jest możliwe w środowisku EPANET, jednak jedynie w formie edytorskiej, wartość
można poprawić tylko i wyłącznie manualnie. Wykorzystanie tzw. „wtyczki” do środowiska
EPANET – EPANET Calibrator – umożliwia zdefiniowanie określonej grupy węzłów i
odcinków celem wykorzystania w późniejszym procesie optymalizacji bazującej na
algorytmie genetycznym, jednak wynik jej działania bardzo często pogarsza model lub
poprawia go w niewielkim stopniu, nie ma przy tym wpływu na parametry algorytmu
optymalizującego, takie jak np. określenie warunków brzegowych i kryteriów [25,26]. Produkt

145
ten w swej obecnej postaci nie spełnia wymogów zaproponowanego przez zespół badawczy
rozwiązania. Algorytm zawiera wszelkie dostępne funkcjonalności algorytmu genetycznego,
które zostały zaimplementowane w znacznie wyższym standardzie, umożliwiającym
nienadzorowaną i możliwie bezbłędną optymalizację parametrów modelu symulacyjnego.
Wadą wtyczki EPANET Calibrator jest brak możliwości zdefiniowania wielu parametrów
jakie udostępnia genetyka ewolucyjna. Zalety te posiada zaimplementowany w Matlabie
przybornik Genetic Algorithm and Direct Search w tym funkcja ga umożliwiająca przekazanie
do algorytmu istotnych do rozwiązania rozpatrywanego zadania parametrów, np.:
ograniczenia zakresu zmienności wartości poszukiwanych parametrów z dołu i z góry (ang.
lower and upper bound), warunki liniowe i nieliniowe, które musza być spełnione i inne.
Własnoręczna implementacja procesu optymalizacji umożliwiła dodatkowo pełną kontrolę
nad definicją funkcji celu, sposobu obliczenia błędu i warunkami zakończenia obliczeń.
Etap 1 (rys.1) uwzględnia również wykonanie pomiarów określonych parametrów pracy
sieci wodociągowej, o których wspomniano powyżej. Przykładowy wynik pomiaru ciśnienia
przedstawiono na rys. 3.
Etap 2 (rys.1) wykonanych prac dotyczy strojenia modelu symulacyjnego, czyli
zoptymalizowanie jego parametrów w taki sposób aby odzwierciedlał on możliwie dokładnie
rzeczywistą sieć wodociągową [27-33]. Zakładając, że model sieci zawiera 1255 linków, to
dla określenia wartości roughness dla każdego z nich w procesie optymalizacji, konieczne
byłoby wykonanie obliczeń dla takiej samej liczby zmiennych zależnych. Warunek ten jest
niemożliwy do spełnienia, m.in. z powodu braku takiej liczby danych pomiarowych, na
podstawie których wyniki strojenia można by było zweryfikować i ze względu na czas
obliczeń potrzebny na wyestymowanie tak dużej liczby parametrów. Z tego powodu sieć
podzielono na sektory [33,34]. Wykonano to w taki sposób, aby w każdym z sektorów
znajdował się węzeł, dla którego istnieje zestaw danych pomiarowych. Funkcja celu ma
następującą postać (1):
n
i
iiFC PP
1
2
)( (1)
gdzie:
FC - wartość funkcji celu
iP wartości ciśnień estymowanych przez model
iP wartości ciśnień estymowanych przez model
Do estymacji optymalnych wartości parametru roughness wykorzystano algorytm
genetyczny, zaimplementowany w środowisku MATLAB. Zdefiniowano następujące wartości
parametrów algorytmu genetycznego:
Liczba parametrów, które są optymalizowane: 10,
Liczebność populacji: 50,
Liczba generacji: 1000,
Czas, po którym w przypadku braku poprawy wyniku następuje zakończenie
algorytmu (czasowy limit bezczynności) (ang. stall time): 100 sek.,
Limit przystosowania (ang. FitnessLimit): 1e-6,
Wartość tolerancji wartości funkcji (ang. TolFun): 1e-6,
Wartość warunku początkowego: przypadkowa (ang. random),
Zakres poszukiwań: [1e-4 – 60].

146
Operatory genetyczne:
a. Selekcja: Stochastyczna równomierna
b. Skalowanie: Rankingowe
c. Mutacja: Gausoidalna
d. Krzyżowanie: Rozproszone
e. Migracja: kierunek w przód, co 20 generacji, 20% populacji
Funkcja celu wykorzystywana w algorytmie genetycznym, która jest minimalizowana,
określona jest równaniem (1).
Na rys. 3 przedstawiono przykładową charakterystykę przedstawiającą zmiany
ciśnienia w wybranym punkcie sieci wodociągowej uzyskane w wyniku procesu strojenia
parametru roughness dla wybranego dnia pomiarowego. Wartości ciśnienia przed strojeniem
zaznaczono kolorem niebieskim, wyniki pomiarów kolorem czarnym, natomiast wynik
optymalizacji z wykorzystaniem algorytmu genetycznego zaznaczono kolorem zielonym. Na
podstawie uzyskanych wyników strojenia stwierdzono bardzo dobre dopasowanie wartości
symulowanych do wartości empirycznych, tj. zarejestrowanych podczas pomiarów an sieci
rzeczywistej. Zwiększając odpowiednio czas trwania procesu estymacji możliwe było
uzyskanie bardziej dokładnych wyników. Czas estymacji jest kluczowym parametr, który
będzie decydował o szybkości obliczeń zaproponowanego systemu ekspertowego. Czas
wykonywania symulacji nie powinien przekraczać 30-40 min.
Rys.3. Przykładowy wynik procesu strojenia (kalibracji) modelu symulacyjnego
W ramach etapu nr 3 (rys.1) wykonywany jest proces estymacji parametrów
dotyczących wycieków. Dostrojony model sieci wodociągowej został zmodyfikowany w taki
sposób, aby możliwe było zasymulowanie w pewnej chwili czasowej wycieku wody o
określonej wielkości i w dowolnym miejscu sektora k. Założono się, że wycieki symulowane
w danym sektorze występują we wszystkich węzłach należących do jego grupy. W
środowisku EPANET wycieki można symulować poprzez zmianę funkcji węzła czyniąc go
emiterem. Emiter to węzeł, który umożliwia symulację wypływu wody z sieci na zewnątrz.
Proces ten był wykonywany w sposób zbliżony do procesu strojenia parametru rougthness,
przy czym do estymacji wykorzystano wstępnie zestrojony model symulacyjny oraz
symulowano wycieki w różnych lokalizacjach i o różnej wartości. Dane te zostały zapisane w
bazie danych. Eksperyment weryfikujący prawidłowe działanie systemu przeprowadzono w

147
ramach etapu 4 (rys.1) dla kilkudziesięciu różnych wielkości wycieków w zakresie: 0.1 – 0.9
% dobowego zużycia wody dla wybranych dni pomiarowych. Przykładowy wynik procesu
weryfikacji przedstawiono na rys.4. W trakcie działania system wnioskujący porównuje
wartości symulowane i empiryczne wartości ciśnienia i oblicza wartość funkcji celu FC (1) w
każdym z sektorów. Wielkości wysterowanych parametrów zapisywane są w bazie danych.
Na podstawie porównania wszystkich wartości FC i numeru sektora, w którym ta wartość jest
najmniejsza, podejmowana jest decyzja diagnostyczna dotycząca istnienia i lokalizacji
wycieku.
Rys.4. Zbiorcze zestawienie wyników eksperymentu prezentujące liczbę wskazań algorytmu
na numer sektora, w którym lokalizuje on wyciek, względem numeru sektora, w którym
wyciek był rzeczywiście symulowany
Zaproponowana metoda detekcji i lokalizacji wycieków w większości wypadków
wskazywała właściwy sektor. W pewnym zakresie algorytm wskazywał również inne sektory,
co miało miejsce zwłaszcza dla małych wielkości wycieków. Dla większych wartości
wycieków lokalizacja sektora zawsze była właściwa. Metoda umożliwia również określenie
wielkości wycieku przyjmując pewien zakres błędu, który szacuje się na poziomie ok. 10%.
Zaimplementowany system został poddany weryfikacji eksperymentalnej, w której
zasymulowano rzeczywisty wyciek w zdefiniowanej lokalizacji sieci. Ten tak zwany wyciek
kontrolowany, pozwolił na sprawdzenie reakcji opracowanego systemu. Wyciek
kontrolowany rozpoczęto o godz. 14. Natomiast system zareagował w przewidzianym czasie,
tj. w ciągu jednej godziny, na obniżoną wartość ciśnienia i dodatkowo prawidłowo oszacował
wielkość wyciek. Wynik tego procesu zaprezentowano na rys. 5. W tym przypadku detekcji
dokonywano w cyklach godzinowych, stąd o godz. 15 algorytm wskazał przekroczenie
wartości progowej, co zostaje jednocześnie zasygnalizowane na ekranie SCADA w
dyspozytorni.

148
Rys.5. Wyniki procesu detekcji wycieku w rzeczywistej sieci wodociągowej
3. PODSUMOWANIE
Celem prac opisanych w niniejszym artykule było opracowanie zestawu metodologii i
bibliotek skryptowych umożliwiających stworzenie systemu monitorującego i diagnozującego
infrastrukturę wodociągową opartego o modelowanie symulacyjne. Opracowany system
charakteryzuje się:
pracą w czasie rzeczywistym, dzięki czemu analizowane są bieżące dane pomiarowe,
pracą zorganizowaną w oparciu o algorytm predykcyjny co usprawnia prawidłową
detekcję zaistniałej awarii.
Efektami realizacji zadań są: określenie czasu wystąpienia wycieku, lokalizacja miejsca
wycieku, oszacowanie wielkości wycieku. Natomiast korzyści wynikające z wdrożenia
efektów realizacji zadań są następujące: obniżenie strat wody, oszczędności spowodowane
zwiększeniem szczelności sieci, szybkość i łatwość w wykrywaniu wycieków, możliwość
przeprowadzania symulacji pracy sieci wodociągowej w różnych parametrach. Proponowane
rozwiązania, wykorzystujące innowacyjne algorytmy przetwarzania, estymacji, optymalizacji i
predykcji danych umożliwią m.in.: symulację awarii w sieci wodociągowej, w tym wycieków
wody, detekcję i lokalizację wycieków, predykcję wielkości poboru wody na podstawie
symulacji przeprowadzanej z wykorzystaniem danych on-line zrejestrowanych przez
urządzenia pomiarowe zainstalowane w rozpatrywanej infrastrukturze wodociągowej.
LITERATURA (Arial 11)
[16] http://www.wodoserwis.pl/wykrywanie%20wyciekow.htm, listopad 2016r.
[17] S. Biedugnis, M. Smolarkiewicz, Bezpieczeństwo i niezawodność funkcjonowania
układów wodociągowych, Szkoła Główna Służby Pożarniczej, Warszawa 2003.
[18] J. Machell, S. R. Mounce, J. B. Boxall, Online modelling of water distribution systems: a
UK case study, Drink, 2010, Water Eng. Sci., vol. 3, str. 21–27.
[19] T. Schiller, Komputerowe modele sieci wodociągowej, 2005, Wodociągi i Kanalizacja, Nr
7, str. 20.

149
[20] A.F. Colombo, P. Lee, B.W. Karney, A selective literature review of transient-based leak
detection methods, 2009, Journal of Hydro-environment Research, vol. 2, str. 212-227.
[21] H.V. Fuchs, R. Riehle, Ten years of experience with leak detection by acoustic signal
analysis, 1991, Applied Acoustics, vol. 3, str. 1-19.
[22] D.A. Liston, J.D. Liston, Leak Detection Techniques. 1992, Journal of the New England
Water Works Association.
[23] O. Hunaidi, W.T. Chu, A. Wang, i in., Leak Detection Methods for Plastic Water
Distribution Pipes, 2000, In Seminars on Water & Sewer Infrastructure Systems:
Challenges and Solutions, Ottawa, Canada, str. 249-270.
[24] P. Lee, J. Vítkovský, Discussion of: P.K. Mohapatra, M.H. Chaudhry, A.A. Kassem, i in.,
Detection of Partial Blockage in Single Pipelines, 2006, Journal of Hydraulic
Engineering, ASCE, vol. 132(N.2), str. 200-206.
[25] X.J. Wang, F.M. Lambert, R.A. Simpson, i in., Leak Detection in Pipelines and Pipe
Networks: A Review, 2001, 6th Conference on Hydraulics in Civil Engineering: The State
of Hydraulics, Barton, A.C.T.: Institution of Engineers, Australia, str.: 391-400.
[26] Sensistor AB, The H2 Method for Locating Leaks in Buried Water Pipes. 1997,
Application Note, Sensistor AB.
[27] O. Hunaidi, Ground Penetrating Radar for Detection of Leaks in Buried Plastic Water
Distribution Pipes. 1998, International Conference on Ground Penetrating Radar.
[28] B.J. Allred, N.R. Fausey, G.P.R Detection of Drainage Pipes in Farmlands, 2004, In
International Conference on Ground Penetrating Radar, Delft, Netherlands.
[29] O. Hunaidi, C.Wing, Acoustical Characteristics of Leak Signals in Plastic Water
Distribution Pipes, 1998, Journal of Applied Acoustic.
[30] Y. Gao, M.J. Brennan, P.F. Joseph, i in., On the selection of acoustic/vibration sensors
for leak detection in plastic water pipes, 2005, Journal of Sound and Vibration, vol.
283(3-5), str. 927-941.
[31] D. Trinchero, R. Stefanelli, L. Cisoni, i in., Innovative ad-hoc wireless sensor networks to
significantly reduce leakages in underground water infrastructures, 2010, Kaleidoscope:
Beyond the Internet? - Innovations for Future Networks and Services, ITU-T. str. 1-4.
[32] C.P. Liou, Pipeline Leak Detection by Impulse Response Extraction, 1998, Journal of
Fluids Engineering, American Society of Mechanical Engineers, vol. 120(4), str. 833-
838.
[33] G.A. Nash, B.W. Karney, Efficient Inverse Transient Analysis in Series Pipe Systems,
1999, Journal of Hydraulic Engineering, vol.125(7), str. 761-764.
[34] D. Covas, N. Graham, C. Maksimovic, i in., An Assessment of the Application of Inverse
Transient Analysis for Leak Detection: Part II - Collection and Application of
Experimental Data, 2003, Proc. Computer Control for Water Industry, London, UK.
[35] Z. Kapelan, D. Savic, G. Walters, i in., An Assessment of the Application of Inverse
Transient Analysis for Leak Detection: Part I - Theoretical Considerations, 2003,
Computer Control for Water Industry, London, UK.
[36] W. Mpesha, S.L. Gassman, M.H. Chaudrhy, Leak detection in pipes by frequency
response method using a step excitation, 2002, Int. Journal of Hydraulic Research,
Vol.40, str. 55-62.
[37] B. Ulanicki, P.L.M. Bounds, J.P. Rance, i in., Open and closed loop pressure control for
leakage reduction, 2000, Urban Water, vol. 2, str. 105-114.
[38] A. Borowa, K. Mazur, M. Grochowski, i In., Lokalizacja wycieków w sieciach dystrybucji
wody, 2008, Wodociągi i Kanalizacja, Nr 3, str. 20.

150
[39] S. Speruda: Ograniczanie strat wody z wycieków – oprogramowania, Wodociągi i
Kanalizacja, Nr 5, 2006, str. 28.
[40] M.A. Brdyś, Modelowanie, monitorowanie i sterowanie w systemach wod-kan, 2007,
Wodociągi i Kanalizacja, Nr 10, str. 22.
[41] M. Nicoloni, A. Patriarca, Model Calibration and System Simulation from Real Time,
2011, Monitoring of Water Distribution Networks, 3rd International Conference on
Computer Research and Development, str. 51-55.
[42] A. Borowa, Krótkoterminowe prognozowanie, 2005, Wodociągi i Kanalizacja, Nr 2,str.14.
[43] T. Rutkowski, Szacowanie wartości niemierzonych dla celów sterowania predykcyjnego,
2005, Wodociągi i Kanalizacja, Nr 7, str. 18.
[44] M. Zmarzły, G. Bialic, R. Stanisławski, i in., Adaptive Estimation Algorithms for Modelling
of Water Distribution Systems, 2008, Polish Journal of Environmental Studies, vol.
17(3B), str. 565-569.
[45] B. Wysogląd, R. Wyczółkowski, An optimization of heuristic model of water supply
system with genetic algorithm, 2006, Diagnostyka, vol. 2(38), str. 49-52.
[46] M. Zmarzły, Simulation results of adaptive estimation algorithms for modeling of water
distribution systems, 2009, Zeszyty Naukowe "Elektryka". vol. 62, str. 79-80.
[47] K. Jezior, K. Mazur, A. Borowa, i in., MultiRegional PCA for leakage detection and
diagnosis in DWDS - Chojnice case study, 2007, Mat. konf. VIII Krajowej Konferencji
Diagnostyka Procesów i Systemów.
[48] J.G. Saldarriaga, S. Ochoa, D. Rodríguez, i in., Water distribution network
skeletonization using the resilience concept, 2008, Proc. of 10th Annual Water
Distribution Systems Analysis Conference, Ruger National Park, South Africa.
[49] B. Ulanicki, A. Zehnpfund, F. Martinez, Simplification of water distribution network
models, 1996, Proc. of 2nd Intl. Conf. on Hydroinformatics, vol. 2, str. 493-500.