BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ BADANIE … · BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ...
35
POLITECHNIKA GDAŃSKA Wydzial Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych SYSTEMY ELEKTROMECHANICZNE PROJEKT ĆWICZENIE (MS) BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ BADANIE ZWARCIA UDAROWEGO ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE Materialy pomocnicze Kierunek Elektrotechnika Studia stacjonarne 2-giego stopnia semestr 1 Opracowal Mieczyslaw Ronkowski Grzegorz Kostro Michal Michna GDAŃSK 2012-2013
Transcript of BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ BADANIE … · BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ...

POLITECHNIKA GDAŃSKA Wydział Elektrotechniki i Automatyki
Katedra Energoelektroniki i Maszyn Elektrycznych
S Y S T E M Y E L E K T R O M E C H A N I C Z N E PROJEKT
ĆWICZENIE (MS)
BADANIE DYNAMIKI MASZYNY SYNCHRONICZNEJ
BADANIE ZWARCIA UDAROWEGO
ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE Materiały pomocnicze Kierunek Elektrotechnika Studia stacjonarne 2-giego stopnia semestr 1
Opracował
Mieczysław Ronkowski Grzegorz Kostro Michał Michna
GDAŃSK 2012-2013


Mieczysław RONKOWSKI 1
ĆWICZENIE (MS) DYNAMIKA MASZYNY SYNCHRONICZNEJ
BADANIE ZWARCIA UDAROWEGO ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE
Program ćwiczenia 1. CEL ĆWICZENIA ...........................................................................................................................................1 2. MODEL FIZYCZNY MASZYNY SYNCHRONICZNEJ........... ........................................................................1 3. DYNAMICZNY MODEL OBWODOWY DWUOSIOWY MASZYNY SYNC HRONICZNEJ ............................3 4. TRANSFORMACJE SKŁADOWYCH WIELKO ŚCI WEKTOROWYCH (SKŁADOWYCH OSIOWYCH )
STOJANA............................................ ........................................................................................................10 5. ZASTOSOWANIE PROGRAMU SYMULACYJNEGO PSPICE DO BA DANIA WŁAŚCIWOŚCI
DYNAMICZNYCH MASZYNY SYNCHRONICZNEJ ................ ..................................................................13 6. WYBRANE WYNIKI SYMULACJI ZWARCIA UDAROWEGO MASZY NY SYNCHRONICZNEJ...............21 7. LITERATURA...................................... .........................................................................................................32 8. ZADANIE ......................................... .............................................................................................................32 9. SPRAWOZDANIE.................................... .....................................................................................................32
1. CEL ĆWICZENIA
Celem ćwiczenia jest: • opanowanie ogólnych umiejętności dotyczących modelowania maszyn synchronicznych; • opanowanie zastosowania programu symulacyjnego PSPICE do badania właściwości dynamicznych
maszyn synchronicznych; • przeprowadzenie analizy symetrycznego zwarcia udarowego maszyny synchronicznej o zadanych
wartościach parametrów modelu obwodowego oraz wymuszeniach elektrycznych i mechanicznych.
2. MODEL FIZYCZNY MASZYNY SYNCHRONICZNEJ
Schemat układu elektromechanicznego na rys. 1 przedstawia model fizyczny maszyny synchronicznej wielofazowej o wydatnobiegunowym wirniku. Układ uzwojeń stanowią: trzy pasma (fazy) na stojanie — tworzące odpowiednio osie magnetyczne as, bs, cs; dwie klatki tłumiące (rozruchowe)1) kd oraz kq na wirniku — tworzące odpowiednio osie magnetyczne d oraz q; klasyczne uzwojenie wzbudzenia2) fd na wirniku — tworzące oś magnetyczną d. W ogólnym przypadku liczba faz uzwojenia (osi) stojana maszyny może być dowolna, a także różna od liczby uzwojeń (osi) wirnika — taki układ uzwojeń nazywa się zwykle układem uzwojeń hybrydowych.
Aby zachować czytelność rysunku, układ uzwojeń fazowych (pasm) maszyny zaznaczono szkicowo na rys. 1 obwodami as-as', bs-bs' oraz cs-cs'. Przy czym, litery as, bs oraz cs oznaczają umowne początki uzwojeń (pasm), a litery as', bs' oraz cs’ — umowne końce tych uzwojeń. Analogiczny sposób wyróżniania umownych początków i końców uzwojeń przyjęto dla wirnika.
Wielofazowe prądy przemienne, płynące w uzwojeniach stojana maszyny, wytwarzają pulsujące pola magnetyczne (siły magnetomotoryczne, przepływy), których osie są skierowane zgodnie z osiami magnetycznymi tych uzwojeń: np. oś as dla uzwojenia stojana as - as’. Osie magnetyczne pozostałych faz są przesunięte względem siebie w przestrzeni odpowiednio o kąt 1200, stanowiąc naturalny układ współrzędnych stojana maszyny synchronicznej. Efektem przesunięcia fazowego (czasowego) prądów i przestrzennego uzwojeń jest wzbudzanie wirującej siły
magnetomotorycznej (SMM) stojana r
Fs . Uzwojenie wzbudzenia fd - fd’, zasilane napięciem stałym, wzbudza pole magnetyczne nieruchome względem
układu elektromagnetycznego wirnika — reprezentowane przez SMM fdFr
. Natomiast dwie klatki tłumiące (rozruchowe) kd-kd’ oraz kq-kq’ stanowią obwody zwarte, w których w ustalonym stanie pracy maszyny nie indukują się żadne prądy (SMM).
1) Liczba klatek tłumiących, które można rozważyć w modelu nie jest ograniczona, np. dla bardziej dokładnych modeli ich liczba jest zwiększona do dwóch w osi d oraz dwóch lub trzech w osi q. 2) Wzbudzenie od magnesów trwałych (odmiana wewnętrznie mocowanych magnesów trwałych, tj. maszyna bezszczotkowa z polem prostokątnym) można zastąpić jednoosiowym uzwojeniem z wymuszeniem stałoprądowym.

2 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
Uwaga: Działanie maszyny synchronicznej oparte jest na zasadzie minimalnej pracy (zasada Hamiltona) — pewnej skłonności sił pola magnetycznego (SMM) stojana i wirnika do zwiększania całkowitego strumienia magnetycznego sprzężonego z układem elektromagnetycznym maszyny, czyli tendencji do magazynowania maksymalnej energii.
W stanie pracy ustalonej maszyny synchronicznej — zgodnie z prawem sterowania maszyn elektrycznych — SMM stojana i wirnika są nieruchome względem siebie, generując stały (jednokierunkowy) moment obrotowy.
Warunkiem generacji stałego momentu obrotowego jest ruch synchroniczny wirującego pola stojana z wirnikiem — uzasadnia to nazwę „maszyna synchroniczna”.
Maszyna synchroniczna będzie rozpatrywana jako układ elektromechaniczny w którym moce, elektryczna
(dostarczana) i mechaniczna (odbierana), ulegają przemianie za pośrednictwem pola magnetycznego. Zatem założonym podstawowym stanem pracy maszyny jest stan silnikowy. Moc pola magnetycznego jest mocą wewnętrzną maszyny, gdyż układ nie ma możliwości wymiany tej mocy z otoczeniem. Pole magnetyczne wyraża się zależnościami strumieniowo-prądowymi. Stąd stan maszyny będzie opisany układem równań napięciowo-prądowych dla strony elektrycznej i momentowo-prędkościowych dla strony mechanicznej.
Te
TL
ωr
JBm
oś - bs
oś - as
oś - q
oś - doś - cs
Fs
Ffd
Rys. 1. Model fizyczny trójfazowej maszyny synchronicznej w układzie osi naturalnych stojana as, bs, cs oraz wirnika q, d
Uwaga: Przyjęty na rys. 1 system strzałkowania napięć, prądów, SMM, prędkości kątowej i momentów obrotowych dotyczy pracy silnikowej.
Pokazane zwroty prądów odpowiadają ich chwilowym wartościom dodatnim (np. w fazie as-as’ prąd dodatni dopływa do przewodu as a wypływa przewodem as’).
Pokazany zwrot prędkości kątowej wirnika przyjęto jako zwrot odniesienia — odpowiada on prędkości o chwilowej wartości dodatniej (ωr > 0).
Maszyna na rys. 1 może być przedstawiona jako wielowrotnik elektromechaniczny — w przypadku trójfazowego układu uzwojeń stojana i dwuzaciskowego uzwojenia wirnika jest to wielowrotnik o pięciu parach zacisków (wrotach). Pary te stanowią: cztery „wejścia elektryczne” — zaciski kolejnych uzwojeń i jedno „wyjście mechaniczne” — koniec wału (sprzęgło). Dynamika (ruch) maszyny jest określona dwoma parametrami mocy na każdej

Mieczysław RONKOWSKI 3
parze zacisków: napięcie i prąd na parze wejść elektrycznych, moment obrotowy i kątowa prędkość obrotowa na parze wyjść mechanicznych. Formalnym opisem dynamiki maszyny będzie układ równań różniczkowych zwyczajnych nieliniowych przy pięciu zadanych wymuszeniach. Układ ten opisuje, m.in., związki między napięciami, prądami i strumieniami magnetycznymi maszyny.
W dalszych rozważaniach przyjęto następujące założenia upraszczające: • uzwojenia stojana maszyny są układem symetrycznym oraz są równomiernie rozmieszczone w żłobkach; • płynące w uzwojeniach prądy o dowolnych przebiegach i częstotliwości wzbudzają SMM stojana i wirnika o
rozkładzie przestrzennym zbliżonym do sinusoidalnego (odwzorowane wektorami przestrzennymi); • wpływ pola elektrycznego między elementami maszyny, zjawisk anizotropii, histerezy i nasycenia obwodu
magnetycznego, strat w żelazie i wypierania prądu w przewodach uzwojeń jest pomijalnie mały (odpowiada to przyjęciu liniowych obwodów magnetycznych i elektrycznych maszyny);
• układ mechaniczny maszyny jest idealnie sztywny, a jego stałymi skupionymi są moment bezwładności i współczynnik tarcia lepkiego.
Do opisu modelu fizycznego maszyny przyjęto trójosiowy (trójfazowy) układ współrzędnych i następujące wielkości oraz parametry (stałe skupione): a) wielkości i parametry elektryczne:
• napięcia fazowe (osiowe) stojana (twornika) uas , ubs , ucs i napięcie wirnika (wzbudzenia) ufd ; • prądy fazowe (osiowe) stojana ias , ibs , ics i prądy wirnika: wzbudzenia ifd , klatek tłumiących ikq , ikd ; • pulsacja napięć i prądów stojana ωe — równoznaczna prędkości kątowej synchronicznej pola wirującego stojana
dla maszyny dwubiegunowej (P = 2); • symetryczne rezystancje uzwojenia stojana rs oraz rezystancje wirnika (wzbudzenia, klatek tłumiących) rfd, rkq,
rkd ; b) wielkości i parametry elektromagnetyczne:
• wektory wirujących SMM o sinusoidalnym rozkładzie przestrzennym: stojana (twornika) r
Fs , wirnika
(wzbudzenia) fdFr
oraz magnesującej (wypadkowej) fdsm FFFrrr
+=;
Uwaga: W stanie nieustalonym (dynamicznym) indukują się także prądy w klatkach tłumiących, które wzbudzają
własne SMM: odpowiednio kqFr
oraz kdFr
, które należy uwzględnić przy wyznaczaniu SMM mFr
.
• strumienie główne (magnesujące) stojana (reakcji twornika) φms i wirnika (magenśnicy) φmfd; • strumienie rozproszenia uzwojeń stojana φls i wirnika (wzbudzenia, klatek tłumiących)
φlfd , φlkq, φlkd ; • moment elektromagnetyczny (wewnętrzny) Te ; • kąt momentu elektromagnetycznego γ ;
c) wielkości i parametry mechaniczne: • kąt położenia przestrzennego θr osi magnetycznej uzwojenia wirnika q względem osi magnetycznej uzwojenia
stojana as (oś as przyjęto jako oś odniesienia); • elektryczna prędkość kątowa wirnika ωr — równoznaczna mechanicznej prędkości kątowej maszyny
dwubiegunowej (P = 2); • moment obciążenia (zewnętrzny) TL ; • sumaryczny moment bezwładności wirnika i obciążenia J; • współczynnik tarcia lepkiego Bm.
3. DYNAMICZNY MODEL OBWODOWY DWUOSIOWY MASZYNY SYNCHRONICZNEJ
W modelu obwodowym maszyny synchronicznej eliminację zmiennego sprzężenia magnetycznego uzwojeń stojana i wirnika, będącego funkcją kąta położenia wirnika θr , uzyskano przez zastąpienie fizycznego uzwojenia stojana uzwojeniem „jakby ruchomym” — uzwojeniem komutatorowym o nieruchomym komutatorze i wirujących szczotkach. W efekcie, oznacza to zastąpienie fizycznych uzwojeń stojana i wirnika uzwojeniami „jakby nieruchomymi” względem siebie. Niesymetria elektryczna i magnetyczna wirnika maszyny synchronicznej narzuca układ osi sztywno związany z układem osi wirnika, wirujących z elektryczną prędkością kątową ωr . Celem uproszczenia opisu założono, że układ ten tworzą dwie osie wzajemnie prostopadłe — w literaturze zwykle oznaczane skrótowo symbolem qd€r (osie i ich oznaczenie qd wprowadził Blondel’a); przy czym indeks górny „r” oznacza, że osie te są związane z obserwatorem na wirniku. Zauważmy także, że osie qd są naturalnymi osiami magnetycznymi wirnika (magneśnicy).
Uwaga: Eliminację zmiennego sprzężenia magnetycznego obwodów stojana i wirnika uzyskano na drodze pomiaru tych sprzężeń z punktu widzenia obserwatora związanego z wirnikiem, ale wirującego stale synchronicznie z ruchomymi szczotkami, które wykorzystuje do pomiaru wielkości (napięć, sem, prądów, strumieni) obwodów stojana.

4 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
Obserwator na stojanie (nieruchomy) — w przeciwieństwie do obserwatora na wirniku — mierzy zmienne (zależne od położenia kątowego wirnika θr) sprzężenia magnetyczne obwodów stojana z obwodami wirnika.
Model obwodowy maszyny synchronicznej opisany w układzie współrzędnych wirnika qd r — przedstawiony
schematycznie na rys. 2 — nazywa się tradycyjnie modelem obwodowym dwuosiowym lub modelem Park’a. W modelu maszyny synchronicznej przedstawionym schematycznie na rys. 2 można wyróżnić:
• wzorcowe sprzężenie transformatorowe (wspólna oś magnetyczna i brak ruchu geometrycznego strumieni względem obwodów);
• wzorcowe sprzężenie elektromechaniczne (osie magnetyczna obwodów są wzajemnie prostopadłe i istnieje ruch geometryczny strumieni względem tych obwodów).
Odwzorowanie modelu obwodowego dwuosiowego maszyny synchronicznej (rys. 2) za pomocą sieci dynamicznej (obwodów elektrycznych z wielkościami elektromechanicznymi, które podkreślają względny ruch mechaniczny uzwojeń ) oparte jest na odpowiednim złożeniu modeli obwodowych wzorcowego sprzężenia transformatorowego i wzorcowego sprzężenia elektromechanicznego. Należy zauważyć, że taka forma modelu maszyny jest adekwatna do zastosowania symulatorów obwodowych (np. programu PSPICE) do analizy stanów dynamicznych maszyny.
Te
TL
ωr
JBm
Fs
Ffd
Rys. 2. Model obwodowy dwuosiowy maszyny synchronicznej — model opisany w wirującym dwuosiowym układzie współrzędnych wirnika qd r (układ osi qd r wiruje z elektryczną prędkością kątową wirnika ωr)
Uwaga: Nieruchome wieloosiowe (wielofazowe) uzwojenie stojana zastąpiono uzwojeniem dwuosiowym "jakby ruchomym".
Zastępczy dwuosiowy układ uzwojeń odtwarza SMM równoważne SMM w maszynie rzeczywistej: w stanie pracy ustalonej maszyny — zgodnie z prawem sterowania maszyn elektrycznych — SMM stojana i wirnika są nieruchome względem siebie.
Oznacza to, że częstotliwość prądów w dwuosiowych obwodach stojana „jakby ruchomych” jest tożsama częstotliwości prądów w obwodach wirnika, czyli jest równa zero — gdyż w wirniku w stanie ustalonym płyną prądy stałe, ale tylko w obwodzie wzbudzenia.

Mieczysław RONKOWSKI 5
W uzwojeniu realnym stojana częstotliwość prądów jest proporcjonalna do elektrycznej prędkości kątowej wirnika.
Przyjęty system strzałkowania napięć, prądów, SMM, prędkości kątowej wirnika i momentów obrotowych dotyczy pracy silnikowej.
Pokazane na rys. 2 zwroty napięć, prądów, strumieni, prędkości kątowej i momentów obrotowych odpowiadają ich chwilowym wartościom dodatnim.
Przyjęto następujące wielkości obwodowe modelu dwuosiowego na rys. 2:
urqs - napięcie zasilania uzwojenia stojana „jakby ruchomego” (napięcie na szczotkach) w osi q;
urds - napięcie zasilania uzwojenia stojana „jakby ruchomego” (napięcie na szczotkach) w osi d;
irqs - prąd obwodu stojana „jakby ruchomego” (prądy do/wpływającego do szczotek) w osi q; irds - prąd obwodu stojana „jakby ruchomego” (prądy do/wpływającego do szczotek) w osi d; irkq - prąd obwodu klatki tłumiącej w osi q; irkd - prąd obwodu klatki tłumiącej w osi d; irfd - prąd obwodu wzbudzenia w osi d; i0s - prąd składowej zerowej obwodu stojana; er
qs , erds - SEM rotacji indukowane w obwodach (napięcie mierzone na szczotkach stojana maszyny
biegnącej jałowo) w osiach qd
Uwaga: Indeks górny „r” oznacza, że wielkości stojana i wirnika mierzone są przez obserwatora wirującego z układem osi wirnika qd — obserwatora związanego z wirnikiem i z wirującymi szczotkami.
SEM rotacji odwzorowują elektromechaniczne przetwarzanie energii — są efektem ruchu geometrycznego strumieni względem obwodów stojana, albo inaczej są efektem ruchu względnego rzeczywistych uzwojeń stojana i wirnika maszyny.
♦ Modele sprzężeń transformatorowych uzwojeń stojana i wirnika maszyny w osiach qd r
Podstawowymi wielkościami charakterystycznymi sprzężeń transformatorowych — sprzężeń między obwodami stojana i wirnika położonymi współosiowo — są SEM transformacji, indukowane zmiennymi w czasie strumieniami.
Zmienny w czasie strumień w osi q (uwaga: nieruchomy względem osi q) sprzęga się z obwodami stojana qs i klatki tłumiącej kq. Analogicznie, zmienny w czasie strumień w osi d (uwaga: nieruchomy względem osi d) sprzęga się z obwodami stojana ds, klatki tłumiącej kd i wzbudzenia fd. Odpowiednie modele fizyczne i modele obwodowe tych sprzężeń przedstawiono na rys. 3.
Występujące wielkości fizyczne i parametry sprzężeń transformatorowych (rys. 3) są następujące: λr
qs - strumień sprzężony z obwodem stojana „jakby ruchomym” w osi q; λr
ds - strumień sprzężony z obwodem stojana „jakby ruchomym” w osi d; λr
lqs - strumień rozproszenia sprzężony z obwodem stojana w osi q; λ’ rlkq - strumień rozproszenia sprzężony z obwodem klatki tłumiącej w osi q; λr
lds - strumień rozproszenia sprzężony z obwodem stojana w osi d; λ’ rlkd - strumień rozproszenia sprzężony z obwodem klatki tłumiącej w osi d; λ’ rlfd - strumień rozproszenia sprzężony z obwodem wzbudzenia w osi d; λr
mq - strumień główny (magnesujący) sprzężony z obwodami w osi q; λr
md - strumień główny (magnesujący) sprzężony z obwodami w osi d; Lmq - indukcyjność magnesowania, modelująca wpływ strumienia głównego w osi q na właściwości
maszyny elektrycznej (dotyczy to strumienia głównego klatki tłumiącej, oraz strumienia reakcji twornika w osi q — oddziaływania pola stojana w osi q);
Lmd - indukcyjność magnesowania, modelująca wpływ strumienia głównego w osi d na właściwości maszyny elektrycznej(dotyczy to strumienia magnesującego wzbudzenia, strumienia głównego klatki tłumiącej, oraz strumienia reakcji twornika w osi d — oddziaływania pola stojana w osi d);
Lls , L'lfd L'lkq i L'lkd - indukcyjności rozproszenia, odpowiednio obwodów: stojana, wzbudzenia oraz klatek tłumiących, modelujące wpływ strumieni rozproszenia tych obwodów na właściwości maszyny elektrycznej.
Uwaga: Indukcyjność, w języku bankowca, można by traktować jako „kurs wymiany” prądu w obwodzie elektrycznym na strumień magnetyczny sprzężony z własnym lub innym obwodem elektrycznym.

6 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
a)
( )4434421
48476
321
rmq
rmqi
rkq
rqsmq
rlqs
rqsls
rqs iiLiL
λλ
λ ′= + +
b)
oś d
ds kd'
rmd
fd'irds i'
rfd
i'rkd
i'kdr
Lmd
r'kdL'lkdLls
ds
r
L'lfd
r'fd
rs
idsr
dsr
u'fdr
fd'r
i'fdr
uds
r
+
+
_
_
( )444 3444 21
44 844 76
321
rmd
rmdi
rkd
rfd
rdsmd
rlds
rdsls
rds iiiLiL
λλ
λ ++ + ′=
rlds
'rlkq
'rlfd
(2)
Rys. 3. Modele sprzężeń transformatorowych obwodów stojana „jakby ruchomych” stojana z obwodami
wirnika w osiach qd r: a) sprzężenie transformatorowe w osi q r a) sprzężenie transformatorowe w osi d
r
Uwaga: Przyjęty na rys. 3 system strzałkowania napięć i prądów dotyczy pracy silnikowej (konwencji odbiornikowej). Zmienne w czasie strumienie sprzężone, opisane rów. (1)-(2), indukują SEM transformacji Zgodnie z zasadą generowania SEM transformacji w transformatorze oś obwodu (uzwojenia) i oś strumienia
jest wspólna.

Mieczysław RONKOWSKI 7
SEM transformacji i związane z nimi równania strumieni sprzężonych odwzorowano modelem obwodowym (schematem zastępczym) typu T transformatora, oddzielnie dla osi q oraz d.
Efektem SEM transformacji jest przepływ energii między obwodami stojana i wirnika. W rozważaniu zjawisk występujących w modelu na rys. 3 stosuje się zasadę superpozycji. Oznacza to
niezależność indukcyjności obwodów elektrycznych od nasycenia obwodów magnetycznych maszyny. Wpływ nasycenia uwzględnia się w dyskusji otrzymanych wyników i ich interpretacji.
Przyjęty na rys. 3 indeks prim oznacza sprowadzenie (redukcję) wartości wielkości i parametrów uzwojeń wirnika do liczby zwojów uzwojenia stojana. Dla uzwojenia wzbudzenia obowiązują następujące zależności redukcji:
′ =r rfd fd
3
22ϑ
(3)
′ =L Llfd lfd
3
22ϑ
(4)
′ =i
ifdr fd2
3 ϑ (5)
′ =u ufdr
fdϑ (6)
gdzie: rfd - rezystancja (realna) uzwojenia wzbudzenia; Llfd - indukcyjność (realna) rozproszenia uzwojenia wzbudzenia; ifd - prąd (realny) uzwojenia wzbudzenia; ufd - napięcie (realne) zasilania uzwojenia wzbudzenia; ϑ - przekładnia między uzwojeniami stojana i wirnika
ϑ =z
z
k
ks
fd
us
uf (7)
przy czym: zs - liczba zwojów jednej fazy uzwojenia stojana; zfd - liczba zwojów uzwojenia wzbudzenia; kus - współczynnik uzwojenia stojana; kufd - współczynnik uzwojenia wzbudzenia.
♦ Modele sprzężeń elektromechanicznych uzwojeń stojana i wirnika w osiach qd r
Efektem sprzężeń elektromechanicznych — sprzężeń występujących między obwodami stojana i wirnika w osiach wzajemnie prostopadłych q oraz d — jest elektromechaniczne przetwarzanie energii w maszynie. Podstawowymi wielkościami charakterystycznymi tych sprzężeń są: moment elektromagnetyczny i SEM rotacji.
• Moment elektromagnetyczny
Interakcja strumienia oraz prądu w obwodach o układzie osi magnetycznych wzajemnie prostopadłych — analogicznie jak w maszynie prądu stałego — generuje moment elektromagnetyczny. W przypadku modelu dwuosiowego maszyny generowane są odpowiednio dwie składowe tego momentu, odpowiadające następującym parom:
• cewka z płynącym prądem irqs w osi q — strumień λrds w osi d;
• cewka z płynącym prądem irds w osi d — strumień λrqs w osi q.
Składowe momentu opisane są następującymi zależnościami:
T ieq qss
dsr= + λ (8)
T ied dss
qsr= − λ (9)
Wypadkowy moment elektromagnetyczny można przedstawić jako sumę dwóch składowych, opisanych powyższymi równaniami, z uwzględnieniem liczby biegunów P. (każda para biegunów generuje moment) i liczby faz. Zasada niezmienniczości momentu elektromagnetycznego i mocy przy przejściu z układu trójosiowego do dwuosiowego wymaga uwzględnienia współczynnika 3/2 :
))()((
223 r
dsrqs
rqs
rds
Pe iiT λ−λ=
(10)
Uwaga: Zauważmy, że zgodnie z zasadą generowania momentu elektromagnetycznego w maszynie prądu stałego — oś wzbudzenia (składowa wektora strumienia w osi d) i oś uzwojenia twornika (oś szczotek, składowa wektora prądu dopływającego do szczotek w osi q) są wzajemnie prostopadłe.

8 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
Celem ustalenia zwrotu (znaku) momentu należy ustalić jaki zwrot prędkości mierzy obserwator na wirniku. Otóż obserwator ten stwierdza, że wiruje stojan; przy czym zauważa, że stojan wiruje zgodnie z ruchem wskazówek zegara — przeciwnie niż wirnik na rys. 2 (realnie wirnik wiruje przeciwnie do ruchu wskazówek zegara). Oznacza to, że dla obserwatora na wirniku dodatni zwrot prędkości to zwrot zgodny z ruchem wskazówek zegara. Zatem, zgodnie z przyjętą konwencją silnikową, należy zmienić zwrot momentu dodatniego na przeciwny w stosunku do przyjętego na rys. 2.
Wobec powyższego, analogicznie jak dla maszyny prądu stałego, zgodnie z przyjętą odbiornikową konwencją strzałkowania, tzn. przy założeniu: dodatnich chwilowych wartości prądów i strumieni osiowych oraz dodatniej chwilowej wartości prędkości kątowej wirnika o zwrocie zgodnym ze zwrotem dodatnim przyjętym przez obserwatora na wirniku:
składowa momentu wg rów. (8) jest typu silnikowego — zwrot momentu zgodny z dodatnim zwrotem prędkości kątowej wirnika;
składowa momentu wg rów. (9) jest typu prądnicowego — zwrot momentu przeciwny do dodatniego zwrotu prędkości wirnika.
Zależności (10), opisująca moment elektromagnetyczny, i związane z nią rów. (1) i (2) osiowych strumieni sprzężonych, można odwzorować w dynamicznym modelu obwodowym maszyny za pomocą sterowanych źródeł napięciowych bądź prądowych — wielkościami sterującymi będą zarówno prądy osiowe stojana irqs oraz irds jak i strumienie osiowe stojana λr
qr oraz λrdr .
• SEM rotacji
Efektem ruchu względnego fizycznych (rzeczywistych) uzwojeń stojana i wirnika maszyny są napięcia indukowane w uzwojeniach stojana. Innymi słowy występuje ruch geometryczny strumieni osiowych λr
qs oraz λrds z
prędkością kątową ωr, który generuje SEM rotacji odpowiednio w obwodzie osi q i w obwodzie osi d stojana. Indukowane SEM rotacji, analogicznie jak dla maszyny prądu stałego, opisane są następującymi równaniami:
eqsr
r dsr= +ω λ (11)
edsr
r qsr= −ω λ (12)
Uwaga: Zauważmy, że zgodnie z zasadą generowania momentu elektromagnetycznego w maszynie prądu stałego — oś wzbudzenia (składowa wektora strumienia w osi d) i oś uzwojenia twornika (oś szczotek, składowa wektora prądu dopływającego do szczotek w osi q) są wzajemnie prostopadłe.
Analogicznie jak dla maszyny prądu stałego, zgodnie z przyjętą odbiornikową konwencją strzałkowania, tzn. przy założeniu: dodatnich chwilowych wartości prądów i strumieni osiowych oraz dodatniej chwilowej wartości prędkości kątowej wirnika o zwrocie zgodnym ze zwrotem dodatnim przyjętym przez obserwatora na wirniku:
składowa SEM wg rów. (11) jest typu silnikowego — przeciwdziała przepływowi prądu twornika (stojana), generującego moment dodatni;
składowa momentu wg rów. (12) jest typu prądnicowego — wspomaga przepływ prądu stojana, generującego moment ujemny.
Zauważmy, że SEM rotacji w maszynie synchronicznej — analogicznie jak w maszynie prądu stałego — jest miarą mocy elektrycznej przetwarzanej na moc mechaniczna, bądź też odwrotnie.
Zależności (11) i (12) opisujące SEM rotacji i związane z nimi rów. (1)-(2) osiowych strumieni sprzężonych
można odwzorować w modelu obwodowym maszyny za pomocą sterowanych źródeł napięciowych — wielkościami sterującymi są prędkość kątowa wirnika ωr oraz odpowiednio strumienie osiowe λr
qs i λrds sprzężone z obwodami
stojana.
• Zapis momentu elektromagnetycznego w formie iloczynu wektorowego
Z punktu widzenia obserwatora na stojanie, równanie (10) można przedstawić w formie następujących iloczynów wektorowych:
r
srs
Pe iT
rrr
))((22
3 ×λ= (13a)
αλ= sin || | |))((
223 r
srs
Pe iT
rr
(13b)
Uwzględniając zapis wektorowy zależności na strumienie sprzężone (podane na rys. 3) w osiach qd,

Mieczysław RONKOWSKI 9
oraz to, że 0 =× r
sr
s iirr
, rów. (13) można zapisać w następującej postaci:
r
srm
Pe iT
rrr
×λ= ))((22
3 (14a)
))()((
223 r
dsrmq
rqs
rmd
Pe iiT λλ −=
(14b)
) )()((
223 r
dsrmqmq
rqs
rmdmd
Pe iiLiiLT −=
(14c)
βλ= sin ||| | ))((
223 r
srm
Pe iT
rr
(14d)
gdzie, irmq oraz irmd - prądy magnesujące (odpowiednie sumy prądów stojana i wirnika w obwodach osi q oraz w osi d — patrz rys.3)
Uwaga: Zauważmy, że w zapisie wektorowym prądów i strumieni stojana można pominąć indeks górny r (indeks wskazujący na składowe wektora w układzie współrzędnych wirnika qd r), gdyż wielkość wektorowa jest niezmiennicza (niezależna) względem dowolnego układu współrzędnych.
Użyty symbol zapisu wektorowego r
Te dla momentu elektromagnetycznego oznacza tutaj tylko zwrot jego działania na wirnik w płaszczyźnie prostopadłej do osi wału — nie oznacza jego kierunku, który zgodnie z wynikiem iloczynu wektorowego jest prostopadły do płaszczyzny wyznaczonej wektorami prądu i strumienia.
Przyjęty w rów. (13) i (14) dodatni zwrot momentu jest zgodny ze zwrotem dodatnim dla obserwatora na stojanie, czyli zwrotem przeciwnym do ruchu wskazówek zegara — tak jak to przyjęto na rys. 1 i 2. Uzyskano to przez zmianę następstwa składowych wektorów w rów. (10).
Interpretację geometryczną rów. (14) może być rys. 4.
β
isr
a) b)
β = π
β < π / 2 λλλλmr
isrS
N
Ffd
Fs
Fs
Ffd
Fm
S
N
Te= 0
Te > 0
λλλλmr
γ
q
d
Ffd
β = γ
d
q
δ
Rys. 4. Interpretacja geometryczna zapisu wektorowego uogólnionego równania (14) momentu elektromagnetycznego maszyny synchronicznej przy ustalonym stanie pracy: a) obciążenie czynno-bierne
(reakcja twornika rozmagnesowująca) — praca silnikowa; b) obciążenie bierne (reakcja twornika rozmagnesowująca) — praca kompensatorowa
Uwaga: Wyznaczenie SMM mFr
dotyczy stanu ustalonego maszyny — pominięto prądy w klatkach tłumiących. Kąt γ jest kątem momentu, kąt β jest kątem obciążenia, natomiast kąt δ jest tzw. kątem mocy maszyny
synchronicznej. Kątem mocy jest interpretowany fizycznie jako kąt między wektorem pola magneśnicy a wektorem pola wypadkowego.

10 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
Moment elektromagnetyczny maszyny wynika z tendencji ustawienia się osi pól magnetycznych stojana i wirnika zgodnie z osią d.
Warunkiem generacji momentu maszyny jest istnienie składowej wektora prądu stojana (pola magnetycznego):
wzdłuż osi q (osi prostopadłej do osi d) lub wzdłuż prostej prostopadłej do wektora SMM mFr
(wg rów.(14)
składowa ta równa jest iloczynowi βsin || r
sir
). Zauważmy, wobec powyższych uwag, że w zasadzie generacji momentu w maszyny synchronicznej istnieje
pewna analogia do generacji momentu w maszynie prądu stałego. Przypomnijmy: moment elektromagnetyczny maszyny prądu stałego jest proporcjonalny do iloczynu prądu
twornika (prądu w osi szczotek q) i strumienia magnesującego (strumienia sprzęgającego się z wirnikiem w osi biegunów głównych d).
adaP
adqP
e λ i λ iT )()(22
==
♦ Model obwodowy układu mechanicznego maszyny — wirnik maszyny i sprzężone z nim obciążenie
Uproszczone równanie równowagi dynamicznej układu mechanicznego (równanie ruchu) ma postać:
T J p B Te P r P m r L= + +( ) ( )2 2 ω ω (15)
przy czym, dla maszyny wielobiegunowej relację między prędkością kątową elektryczną a mechaniczną (realną) wirnika określa zależność:
ω ωrm P r= ( )2 (17)
Równanie ruchu można odwzorować modelem obwodowym, przyjmując następujące analogie: • źródło napięcia — moment obrotowy (Te , TL ); • prąd — prędkość kątowa ωr ; • indukcyjność — moment bezwładności J ; • rezystancja — współczynnik tarcia lepkiego Bm.
Na podstawie powyższych rozważań sformułowano przedstawiony na rys. 5 dynamiczny model obwodowy dwuosiowy maszyny synchronicznej — model opisany w dwuosiowym ruchomym układzie współrzędnych wirnika qd r.
W ogólnym przypadku, dla modelu obwodowego na rys. 5, wymuszenia na zaciskach elektrycznych stojana i wirnika mogą być dowolnymi funkcjami czasu (zalecany przebieg sinusoidalny dla stojana, przebiegi stałe dla wirnika). Natomiast, wymuszenie na „zaciskach mechanicznych” (wał maszyny) jako moment obrotowy (obciążenia lub napędowy, np. turbiny) — odwzorowany za pomocą niezależnego lub sterowanego źródła napięciowego — może być stałe lub zmienne: np. zależne od czasu lub prędkości kątowej (liniowo lub kwadratowo).
4. TRANSFORMACJE SKŁADOWYCH WIELKO ŚCI WEKTOROWYCH (SKŁADOWYCH OSIOWYCH ) STOJANA
• Transformacje
Transformacja dowolnych wielkości 3-osiowych (3-fazowych) oznaczonych fas, fbs, fcs w układzie współrzędnych as bs cs do układu współrzędnych qd r — wirującego z prędkością kątową wirnika ωr — opisują równania:
θθθθθθ
=
cs
bs
as
rrr
rrr
s
rds
rqs
f
f
f
f
f
f
2/12/12/1
sinsinsin
coscoscos
32
12
12
0
(17a)
np. przy transformacji napięć fazowych fizycznego uzwojenia stojana do układu qd0 otrzymamy:
θθθθθθ
=
cs
bs
as
rrr
rrr
s
rds
rqs
u
u
u
u
u
u
2/12/12/1
sinsinsin
coscoscos
3
212
12
0
(17b)

Mieczysław RONKOWSKI 11
Rys. 5. Dynamiczny model obwodowy dwuosiowy maszyny synchronicznej (model Park’a) — model opisany w dwuosiowym układzie współrzędnych wirnika qd r, wirującym z prędkością kątową wirnika ωr :
a) model obwodowy osi q; b) model obwodowy osi d; c) model obwodowy składowej 0; d) analog (obwód) elektryczny układu mechanicznego
Transformacja dowolnych wielkości 2-osiowych oznaczonych frqs, frds, f0s w układzie współrzędnych qd r do
układu współrzędnych as bs cs opisują równania:
θθθθθθ
=
s
rds
rqs
rr
rr
rr
cs
bs
as
f
f
f
f
f
f
011
22
1sincos
1sincos
1sincos
(18a)
np. przy transformacji prądów uzwojenia dwuosiowego qd0 do układu współrzędnych as bs cs otrzymamy:
θθθθθθ
=
s
rds
rqs
rr
rr
rr
cs
bs
as
i
i
i
i
i
i
011
22
1sincos
1sincos
1sincos
(18b)
gdzie:
3/2 3/2 21 π−θ=θπ+θ=θ rrrr
)0()(0
rt
rr d θ+ξξω=θ ∫ (19)

12 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
ξ - zmienna podcałkowa, t - czas, θr(0) - położenie początkowe wirnika.
Składową zerową, np. dla prądu stojana, zdefiniowano następująco:
)(
31
0 csbsasss iiii ++=
(20)
Jeżeli połączono uzwojenia stojana w gwiazdę bez przewodu zerowego, to:
i i ias bs cs+ + = 0
(21)
zatem składowa zerowa i ss0 0= .
Niezmienniczość mocy i momentu elektromagnetycznego zarówno dla układu trójosiowego jak i
dwuosiowego wymaga zastosowania współczynnika 3/2 przy przejściu do układu dwuosiowego:
p u i u i u iabc a a b b c c= + + (22)
)2(= 0023
0 iuiuiupp ddqqabcqd ++= (23)
Przyjęte oznaczenia zmiennych w równaniach (17) -(19) odpowiadają symbolom na rys.1, 2, 3 oraz 5. Wykorzystując koncepcję modelu obwodowego transformatora idealnego, równania transformacji (17)-(19)
można odwzorować modelem obwodowym pokazanym na rys. 6. Zastosowano odpowiednio źródła sterowane napięciowe do rów. (17) i prądowe do rów. (18), a dla odwzorowania rów. (19) zastoswano obwód złożony ze źródła prądowego sterowanego prędkością kątową ωr ładującego kondensator o pojemności C = 1 F — napięcie na kondensatorze jest analogiem kąta θr .
Rys. 6. Model obwodowy transformacji abc/qd0 oraz qd0/abc między zmiennymi maszynowymi (zaciskowymi) a zmiennymi transformowanymi (dwuosiowymi) obwodów stojana maszyny synchronicznej:
a) obwody zmiennych zaciskowych fazowych stojana; b) obwody zmiennych zaciskowych obwodów w osiach qd0 stojana; c) obwód całkowania prędkości kątowej wirnika
Uwaga: Przyjęty system strzałkowania napięć i prądów dotyczy pracy silnikowej.

Mieczysław RONKOWSKI 13
Odpowiednie połączenie modeli obwodowych na rys. 5 oraz na rys. 6 przedstawiono na rys. 7.
Rys.7. Wielozaciskowy dynamiczny model obwodowy trójfazowej maszyny synchronicznej o wzbudzeniu elektromagnetycznym, opisany w układzie współrzędnym hybrydowym abcs/qd r0
Uwaga: Przyjęty system strzałkowania napięć, prądów prędkości kątowej wirnika i momentów dotyczy pracy
silnikowej. Indeks „prim” oznacza sprowadzenie wartości zmiennych i parametrów do liczby zwojów uzwojenia stojana, a
indeks górny „r” oznacza opisanie odpowiedniej wielkości stojana i wirnika w układzie osi qd r sztywno związanych z wirnikiem (wielkości stojana i wirnika mierzone przez obserwatora na wirniku).
• Moduły wielkości wektorowych
Moduły wektorów napięć, prądów i strumieni w układzie dwuosiowym oblicza się zgodnie z ogólną zależnością:
22 d+q|= )()( składowa_składowa_oramoduł wekt
→|
(24)
5. ZASTOSOWANIE PROGRAMU SYMULACYJNEGO PSPICE DO BA DANIA WŁAŚCIWOŚCI DYNAMICZNYCH MASZYNY SYNCHRONICZNEJ
♦ Stany dynamiczne maszyny synchronicznej
Stany dynamiczne maszyny synchronicznej określone są przez następujące czynniki: • warunki zasilania (wymuszenia elektryczne); • przebiegi napięć, prądów i strumieni sprzężonych poszczególnych faz uzwojeń stojana i wirnika;

14 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
• rozwijany przez maszynę moment elektromagnetyczny (wewnętrzny) jako wynik wzajemnego oddziaływania odpowiednich prądów i strumieni sprzężonych;
• warunki obciążenia na wale maszyny (moment zewnętrzny — obciążenia lub napędowy, np. turbiny, prędkość kątowa wirnika);
• wypadkowy moment bezwładności (maszyny synchrpnicznej i maszyny napędzanej lub napędzającej)
Maszyna synchroniczna pracująca jako silnik może być zasilana w warunkach sieci sztywnej lub elastycznej; przy czym napięcia zasilania mogą mieć przebieg sinusoidalny lub odkształcony (np. zasilanie z falownika), mogą być symetryczne lub niesymetryczne.
Maszyna synchroniczna pracująca jako prądnica może być połączona z siecią autonomiczną (wydzieloną) lub z siecią sztywną (system elektroenergetyczny)
Warunki obciążenia na wale — „zaciskach mechanicznych” — maszyny synchronicznej pracującej jako silnik mogą być stałe lub zmienne: np. zależne od czasu lub prędkości kątowej maszyny (liniowo lub kwadratowo).
Typowe stany pracy dynamicznej maszyny synchronicznej, pracującej w układzie napędu elektrycznego, mogą być następujące:
• rozruch (asynchroniczny, za pomocą silnika pomocniczego, połączony z synchronizacją z siecią” lub za pomocą przemiennika częstotliwości);
• hamowanie; • nawrót; • skokowa (lub inna) zmiana momentu obciążenia lub napędowego; • wybieg grupowy (np. zanik napięcia w sieci zasilającej kilka maszyn synchronicznych); • stany zwarcia w sieci zasilającej maszyny synchroniczne (np. zwarcie chwilowe na zaciskach uzwojenia
stojana, zwarcie uzwojenia wzbudzenia). Typowe stany pracy dynamicznej maszyny synchronicznej, pracującej w systemie elektroenergetycznym, mogą
być następujące: • synchronizacja z siecią; • skokowa (lub inna) zmiana obciążenia w systemie elektroenergetycznym; • skokowa (lub inna) zmiana momentu obciążenia lub napędowego (źródła energii mechanicznej, np.
turbiny); • stany zwarcia w systemie elektroenergetycznym (np. zwarcie chwilowe na zaciskach uzwojenia stojana,
zwarcie uzwojenia wzbudzenia, zanik prądu wzbudzenia); • kołysania wynikające ze: zmiany momentu obciążenia lub napędowego; zwarcia chwilowego na zaciskach
uzwojenia stojana, uzwojenia wzbudzenia, zaniku prądu wzbudzenia). Właściwa analiza wymienionych wyżej stanów pracy dynamicznej — stanów nieustalonych elektromechanicznych — maszyny synchronicznej, ze względu na nieliniowość zachodzących procesów elektromechanicznych w maszynie, wymaga zastosowania zaawansowanych technik symulacyjnych. Opracowany w p. 3 niniejszego opracowania model obwodowy maszyny stanowi wygodną bazę do obliczeń komputerowych, wykorzystujących programy do symulacji obwodów elektrycznych, takich jak: NAP, PSPICE, TUTSIM, itp. Program PSPICE wydaję się być zarówno programem najbardziej zaawansowanym jak i przyjaznym dla użytkownika, w klasie programów symulacyjnych obwodów elektrycznych.
♦ Budowa modelu symulacyjnego w programie PSPICE do analizy zwarcia udarowego prądnicy synchronicznej
Założono, że analiza zwarcia udarowego prądnicy synchronicznej dotyczy przypadku jej pracy samotnej w stanie biegu jałowego (prądnica jest odłączona od sieci).
Opierając się na modelu obwodowym maszyny synchronicznej przedstawionym na rys. 7, założeniu pracy samotnej oraz zasadach formułowania modelu symulacyjnego — obowiązujących dla programu PSPICE — zbudowano odpowiedni analog elektryczny maszyny pokazany na rys. 8. Każdy zdefiniowany element analogu jest włączony w obwód w dokładnie określonych węzłach. Określenie węzłów polega na przypisaniu każdemu z nich kolejnej liczby lub ciągu liter. Nie obowiązuje żadna hierarchia tych oznaczeń. Jedynym warunkiem jest umieszczenie na liście węzłów, węzła z numerem „0”. Natomiast zdefiniowanie elementu analogu polega na podaniu typu elementu: np. źródło napięcia, źródło prądu, rezystancja, indukcyjność, pojemność, wyłącznik itp.

Mieczysław RONKOWSKI 15
Z
RZ
as1E_UasG_Ias
asSas
bs1E_UbsG_Ibs
bsSbs
cs1E_UcsG_Ics
csScs
0
Sqs_r
Uqs_r
qs_r
Sds_r
ds_r
Uds_r
trV(tr)= θr
m
Rys. 8. Analog elektryczny maszyny synchronicznej w układzie osi abcs/qd r do symulacji zwarcia udarowego:
a) obwody fazowych wielkości zaciskowych stojana w układzie osi naturalnych as, bs, cs (obwód realizujący obliczenia napięć i prądów wg rów. (18a)); b) obwody wielkości transformowanych w osi q; c) obwody wielkości transformowanych w osi d; d) obwód realizujący obliczenia kąta położenia wirnika
wg rów. (19); e) obwód (analog) elektryczny układu mechanicznego, realizujący obliczenia momentu elektromagnetycznego wg rów. (14)

16 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
W badaniach stanów nieustalonych maszyny synchronicznej należy określić wartości parametrów jej modelu obwodowego, charakter wymuszeń elektrycznych i mechanicznych.
a) Wartości parametrów modelu maszyny
Wartości parametrów modelu obwodowego maszyny synchronicznej (podanego na rys. 7) można obliczyć z wystarczającą dokładnością do obliczeń inżynierskich na podstawie danych katalogowych maszyny. Ich wartości zwykle podaje się w jednostkach względnych.
Ogólne relacje przeliczania wartości parametrów z jednostek bezwzględnych [Ω] na względne [%] i odwrotnie są następujące:
%100% nZX
X Ω= lub %100/ % nZXX =Ω (26)
%100% nZR
R Ω= lub %100/ % nZRR =Ω (27)
gdzie, tzw. impedancję „znamionową” (odniesienia) wylicza się następująco:
• połączenie w gwiazdę:
nSsnU
nZ2
= (28a)
• połączenie w trójkąt:
nSsnU
nZ23= (28b)
gdzie, Usn - napięcie znamionowe uzwojenia stojana (wartość przewodowa), Sn - moc znamionowa maszyny w [VA].
Wyznaczmy dla przykładu niektóre parametry generatora synchronicznego o wydatnych biegunach typu GD8-1000-50 o danych:
DANE ZNAMIONOWE
Sn Pn Usn Isn fen Ifdn Ufdn P J
1000 kVA 950 kW 400 V (Y) 1445 A 50 Hz 51 A 80 V 8 34.75 kgm2
DANE OBWODOWE
REZYSTANCJE [%]
rs% rkq% rkd% rfd%
1.44 5.64 3.96 0.188
REAKTANCJE ROZPROSZENIA [%]
X ls% Xlkq% Xlkd% Xlfd%
7.0 8.89 8.82 18.7
REAKTANCJE SYNCHRONICZNE [%]
Xq% X” q% Xd% X’ d% X” d%
64.2 14.7 122.6 23.1 12.7
Uwaga: Na podstawie danych reaktancji synchronicznych Xq w osi q oraz Xd w osi d, a także danej reaktancji
rozproszenia uzwojenia stojana Xls wylicza się wartości reaktancji magnesujących (oddziaływania twornika) w następujący sposób:
%%% lsqmq XXX −=
%%% lsdmd XXX −=

Mieczysław RONKOWSKI 17
% 2.570.72.64%%% =−=−= lsqmq XXX
% 6.1150.76.122%%% =−=−= lsdmd XXX
Ω 16.010000002400
2===
nSsnU
Zn
Ω 0112.0100/0.70.16%100/ % =⋅== lsnls XZX
Ω 0.09152 100/2.570.16%100/ % =⋅== mqnmq XZX
Ω 0.18496 100/6.1150.16100/ % =⋅== mdnmd XZX
mH 0.03567 / == elsls XL ω
mH 0.2915 / == emqmq XL ω
mH 0.589 / == emdmd XL ω
gdzie: 2 ene fπω =
Analogicznie można wyznaczyć wartości mianowane (ohmy, indukcyjności) pozostałych parametrów elektrycznych modelu obwodowego maszyny synchronicznej (pokazanego na rys. 5).
Do wprowadzania i przeliczania wartości parametrów modelu obwodowego maszyny synchronicznej w programie PSPICE można wykorzystać komendę (instrukcję) .PARAM, którą ilustruje następujący przykład:
****** Dane znamionowe prądnicy wg P.G. (ICEM'88)******************* * Generator synchroniczny typu GD8-1000-50 * moc pozorna, czynna, napięcie i prąd stojana * Sn=1000kVA Pn=950kW Usn=3x400V(Y) Isn=1445A * prąd i napięcie wzbudzenia * Ifdn=51A Ufdn=80V * częstotliwość, liczba biegunów, moment bezwładności * fen=50Hz P=8 Jn=34.75kgm2 * Podstawienie wartości danych znamionowych .PARAM Usn=400 Isn=1445 Pn=950e3 fen=50 Jn=34.75 P=8 * Podstawienie wartości parametrów obwodowych w jednostkach względnych w [%] .PARAM rs_=1.44 rkq_=5.64 rkd_=3.96 rfd_=0.188 .PARAM Xls_=7.0 Xlkq_=8.89 Xlkd_=8.82 Xlfd_=18.7 Xmq_=57.2 Xmd_=115.6 ****************************************************************** ***** Pomocnicze stale liczbowe ************************************** .PARAM Pi=3.14159 p1=Pi/2 p2=2*Pi/3 ******Przeliczenie wartości względnych parametrów na ich wartości bezwzględne .PARAM We=2*Pi*fen ;pulsacja napięcia = prędkości elektrycznej pola wirującego ***** Wielkości obliczone ******************************************** .PARAM Zn=Usn/sqrt(3)/Isn ;impedancja znamionowa .PARAM rs=rs_*Zn/100 rkq=rkq_*Zn/100 rkd=rkd_*Zn/100 rfd=rfd_*Zn/100 .PARAM Lls=Zn*Xls_/100/We Llkq=Zn*Xlkq_/100/We Llkd=Zn*Xlkd_/100/We .PARAM Llfd=Zn*Xlfd_/100/We Lmq=Zn*Xmq_/100/We Lmd=Zn*Xmd_/100/We ********************************************************************
b) Wymuszenia elektryczne Zgodnie z przyjętym powyżej założeniem maszyna synchroniczna pracuje samotnie w stanie biegu jałowego.
W takich warunkach pracy napięcie na zaciskach uzwojenia stojana maszyny zależy od prądu wzbudzenia i prędkości kątowej wirnika. Przy założeniu sinusoidalnego rozkładu pola wzbudzenia w szczelinie głównej maszyny, napięcie na zaciskach ma charakter następujących przebiegów sinusoidalnych (odpowiadających napięciom fazowym uzwojenia stojana):
)3/2cos(2
)3/2cos(2
cos2
π+θ=
π−θ=
θ=
euscs
eusbs
eusas
Uu
Uu
Uu
()
gdzie: Us - wartość skuteczna napięcia, θeu - faza napięcia, która wylicza0 się — w przypadku pracy samotnej maszyny
— wg następujących zależności:

18 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
• w stanie nieustalonym
)0()(0
r
t
reu θdω +∫= ξξθ (29)
• w stanie ustalonym
)0( rreu tΩθ θ+= (30)
przy czym: ωr - zmienna w czasie elektryczna prędkości kątowa wirnika; Ωr - niezmienna w czasie elektryczna prędkości kątowa wirnika; θr(0) - początkowe położenie kątowe elektryczne wirnika; ξ - zmienna podcałkowa; t - czas. Uwaga: Dla rozważanego przypadku pracy samotnej maszyny zachodzi tożsamość: między pulsacja napięcia ωe a prędkością kątową elektryczną wirnikaωr, tzn.:
re ωω = (stan nieustalony) lub re ΩΩ = (stan ustalony)
między początkowym położeniem kątowym wirnika a fazą początkowa napięcia, tzn.:
)(θ)(θ reu 00 =
W stanie biegu jałowego prądnicy synchronicznej na zaciskach uzwojenia stojana pojawia się napięcie równe SEM indukowanej wirującym strumieniem wzbudzenia (magneśnicy) φmd. Amplituda napięcia stojana, przy zadanej elektrycznej prędkości kątowej wirnika, zależy bezpośrednio od prądu wzbudzenia. Wartość tego prądu należy tak dobrać, aby przed wystąpieniem zwarcia SEM indukowana równała się napięciu znamionowemu prądnicy. Odpowiednie zależności na wyznaczenie prądu wzbudzenia są następujące: • amplituda fazowego napięcia stojana dla uzwojenia połączonego w gwiazdę:
3/ 2 snUUsm = (31)
• amplituda SEM zgodnie z rów. (11):
rdsr
rqsoom eEE λω 2 ===
rfdomdr
rfdomdlsr ILILL ′ω=′++ω= )]0(0[ (32)
gdzie: Usn - napięcie znamionowe stojana (wartość międzyprzewodowa);
rfdoI ′ - prąd wzbudzenia przy biegu jałowym prądnicy (wartość zredukowana do liczby zwojów uzwojenia stojana).
W miejsce prądu stojana w osi q, zgodnie z założonym biegiem jałowym prądnicy, podstawić należy wartość zero.
Uwaga: Zależność na sem Eo jest równoważna zależności klasycznej, poznanej w ramach wykładów z maszyn elektrycznych I:
ussmdeo kzfE Φ44.4=
gdyż przy założeniu liniowego obwodu magnetycznego
ussmdmd kzΦ=λ
oraz
eee ωff2
12
244.4 == π
re ω=ω
W wyniku porównania prawych stron zależności (32) i (32) otrzymamy:
mdLrω
snUrfdoI
32=′ (33)

Mieczysław RONKOWSKI 19
Z kolei, znając wartość prądu wzbudzenia i rezystancję uzwojenia wzbudzenia, określamy wartość napięcia wzbudzenia przy biegu jałowym prądnicy (wartość zredukowana do liczby zwojów stojana):
rfdofd
rfdo IrU ′′=′ (34)
Celem zbadania wpływu wartości prądu i rezystancji wzbudzenia na przebieg zwarcia udarowego prądnicy synchronicznej wprowadzono następujące współczynniki: k_Ufd - doboru napięcia zasilania obwodu wzbudzenia, k_Rfd - współczynnik powiększenia rezystancji obwodu wzbudzenia, przy czym wartości aktualne napięcia zasilania obwodu wzbudzenia i całkowitej rezystancji obwodu wzbudzenia wyznacza się wg następujących zależności:
rfdoU fdUkr
fdU ′=′ _ (35a)
fdR fdRkfdcR ′=′ _ (35b)
fdc
rfdr
fd R
UI
′
′=′ )0( (36)
przy czym, współczynnik k_Rfd może przyjąć wartości = lub >1. Wykorzystanie komendy (instrukcji) .PARAM w programie PSPICE do wyznaczania aktualnych wartości napięcia zasilania obwodu wzbudzenia i całkowitej rezystancji obwodu wzbudzenia ilustruje następujący przykład: ***** Określenie wymuszeń elektrycznych ******************************** PARAM Usm=SQRT(2/3)*Usn ;amplituda napięcia fazowego .PARAM Wr=We ;prędkość elektryczna wirnika = pulsacji napięcia .PARAM Ifd0_r=Usm/(Lmd*Wr) Ufd0_r=rfd*Ifd0_r * Ufd0_r - napiecie zasilania obwodu wzbudzenia wymuszające prąd wzbudzenia Ifd0_r, * który wzbudza w stanie jałowym maszyny napięcie znamionowe * na zaciskach uzwojenia stojana ***** Pomocnicze parametry zadane *********************************************** .PARAM k_Ufd=1.0 k_Rfd=1.0 * k_Ufd - współczynnik doboru napięcia zasilania obwodu wzbudzenia; * k_Rfd - współczynnik powiększenia rezystancji obwodu wzbudzenia; * przy czym: .PARAM Ufd_r=k_Ufd*Ufd0_r Rfd_c=k_Rfd*rfd gdzie: Ufd_r - aktualne napięcia zasilania obwodu wzbudzenia; Rfd_c - aktualna rezystancja całkowita obwodu wzbudzenia; *****************************************************
c) Wymuszenia mechaniczne Klasyczne wymuszenia mechaniczne (moment na wale) dla prądnicy synchronicznej mogą być o charakterze
stałego lub zmiennego momentu napędowego Tm : np. zależnego od czasu lub prędkości kątowej maszyny (liniowo lub kwadratowo). Przykładowe wartości momentu obciążenia można zapisać następująco:
• stały moment napędowy o wartości zerowej Tm = 0 (37)
• stały moment napędowy o wartości momentu znamionowego Tm = Tmn (38)
gdzie, dla danej znamionowej mocy Pn i prędkości obrotowej nn rmnnPmnT ω/= (39)
ω πrmn = 2 60 nn / (40)
• moment napędowy zależny od czasu, np. zmieniający się skokowo (impulsowo) od wartości Tm = 0 do Tm = Tmn
Uwaga: W badaniach zwarcia udarowego prądnicy synchronicznej, zgodnie z przyjętymi założeniami, utrzymywana będzie stała wartość prędkości kątowej wirnika. Aby utrzymać stałą wartość prędkości wirnika, w czasie zwarcia udarowego, znacznie powiększa się moment bezwładności wirnika (np. J*1010), a wartość momentu napędowego przyjmuję się równą zero, tzn. Tm = 0.

20 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
Współczynnik tarcia lepkiego Bm szacuje się wg następującej zależności:
2)( rmn
mPmB
Ω
∆= (41)
gdzie: straty mechaniczne szacuje się w zależności od mocy znamionowej maszyny jako ∆Pm = (0.05 ÷ 0.1) % Pn
Ωrmn - znamionowa prędkość kątowa mechaniczna maszyny. Celem wprowadzenia wartości momentu napędowego, w programie PSPICE wykorzystuje się instrukcję
definiującą źródła napięciowe niezależne lub zależne (jako analog momentu), którą ilustrują następujące przykłady:
*Parametry i wymuszenia układu mechanicznego .PARAM Tmn=Pn/(Wr/(P/2)) ; znamionowy moment napędowy .PARAM Bm=0.01*Pn/(Wr*2/P*We*2/P) ; współczynnik tarcia * celem utrzymania stałej prędkości obrotowej w stanie zwarcia * wprowadzono 1e10 krotne powiększenie momentu bezwładności wirnika .PARAM J=Jn*1e10 **********************************************************************
d) Określenie warunków początkowych
W badaniach stanu zwarcia udarowego maszyny synchronicznej za pomocą programu PSPICE warunki początkowe ustala się dla wartości prądów i prędkości kątowej wirnika, odpowiadające wyjściowemu stanowi ustalonemu maszyny. Przy czym prąd wzbudzenia ma wartość różną od zera — określoną wg zależności (33), a pozostałe prądy przyjmują zerowe wartości początkowe. Oprócz początkowej wartości prądu wzbudzenia i prędkości kątowej wirnika należy określić początkowe położenie kątowe wirnika i chwilę (moment) włączenia zwarcia. W programie PSPICE zwarcie realizowane jest za pomocą łączników sterowanych napięciowo — łączników typu VSWITCH.
Warunki początkowe zwarcia udarowego maszyny synchronicznej, zapisane w programie PSPICE, ilustrują następujące przykłady:
*****Warunki poczatkowe zwarcia *********************************************** *poczatkowe polozenie katowe wirnika tr0 .PARAM tr0=0 * oznacza, ze dla t=0 napiecie w fazie as osiaga wartosc maksymalna: Uas(0)=Usm **************************************************************************** *Model lacznika typu SWITCH sterowanego napieciowo .MODEL SMOD VSWITCH (RON=1E-4 ROFF=1E4 VON=1 VOFF=0) *gdzie: SMOD przyjeta nazwa modelu lacznika, gdzie VSWITCH ozancza lacznik sterowany napieciowo *laczniki typu SWITCH oznaczone jako: Sas, Sbs, Scs, Sqs_r, Sds_r, *zwieraja pary zaciskow qs_r i 0 oraz ds_r i 0 obwodow stojana w osiach qd *****Sterowanie chwila wlaczenia i wylaczenia zwarcia maszyny *zalaczanie zwarcia dla chwili tz=0.035s gdy w fazie as napiecie Uas(tz)=0, *tzn. po wykonaniu przez wirnik 1 i 3/4 obrotu * tz - chwila (moment) wlaczenia zwarcia * tw - chwila wylaczenia zwarcia .PARAM tz=0.035 tw=3 *napiecie typu PULSE sterujace lacznikami: Sas Sbs Scs Sqs_r Sds_r VS 100 0 PULSE(0 1 tz 0 0 tw 100) RS 100 0 1 ;rezystancja pomocnicza *********************************************************************************************** * indukcyjnosc rozproszenia obwodu stojana Llsq 9 11 Lls IC=0 Llsd 10 12 Lls IC=0 * indukcyjnosc magnesowania osi q Lmq 11 13 Lmq IC=0 * indukcyjnosc magnesowania osi d Lmd 12 14 Lmd IC=Ufd_r/Rfd_c ;poczatkowy prad wzbudzenia wg wzoru (36) * indukcyjnosc rozproszenia klatek tlumiacych Llkq 15 11 Llkq IC=0 Llkd 16 12 Llkd IC=0 * indukcyjnosc rozproszenia uzwojenia wzbudzenia Llfd 26 12 Llfd IC=Ufd_r/Rfd_c ;poczatkowy prad wzbudzenia wg wzoru (36) * moment bezwladnosci

Mieczysław RONKOWSKI 21
L_J Te 19 (2/P)*J IC=We ; zgodnie z zalozeniem Wr=We
e) Określenie czasu trwania obliczeń
Analiza stanów dynamicznych maszyny synchronicznej za pomocą programu PSPICE wymaga określenia czasu trwania obliczeń TSTOP — czasu określającego koniec obliczeń. Czas ten — w przypadku zwarcia udarowego — można w przybliżeniu oszacować wg zworu:
dT′≥ 4 TSTOP (42)
gdzie, stała czasowa przejściowa stanu zwarcia w osi podłużnej d:
ms 4.428)(
1 =+
+′′
=′lsmd
lsmdlfd
fded XX
XXX
rT
ω (43)
f) Komendy analizy czasowej .TRAN oraz wyprowadzania wyników obliczeń .PROBE
W badaniach stanów nieustalonych za pomocą programu PSPICE wykorzystuje się komendę analizy czasowej o następującym formacie: .TRAN <HWYDR> <TSTOP) <TDR> <HMAX)> <UIC> gdzie, HWYDR - krok wydruku czyli odstęp czasowy wyprowadzania wyników obliczeń do zbioru wynikowego z
rozszerzeniem .OUT (jeżeli zostanie użyta instrukcja .PRINT); TSTOP - czas analizy od czasu t = 0 s do t = TSTOP s określającego koniec obliczeń; TDR - czas określający rozpoczęcie zapisu wyników do zbioru wynikowego z rozszerzeniem .OUT (jeżeli
zostanie użyta instrukcja .PRINT) i zbioru wynikowego z rozszerzeniem .DAT (jeżeli zostanie użyta instrukcja .PROBE);
HMAX - maks. krok obliczeń o wartości domyślnej = TSTOP/50 s - faktyczny krok obliczeń H jest dobierany automatycznie w trakcie trwania obliczeń; ale wg zasady H <= HMAX.
UIC - parametr oznacza, że do obliczeń będą brane warunki początkowe zapisane za pomocą oddzielnej instrukcji .IC (INITIAL CONDITIONS) lub za pomocą wyrażenia IC= , które jest podane w liniach określających indukcyjność (IC= prąd początkowy) lub pojemność (IC= napięcie początkowe).
Uwaga: W analizie maszyn elektrycznych, ze względu na możliwość wystąpienia oscylacji numerycznych
(niestabilność rozwiązania w fazie obliczeń, kiedy maszyna wchodzi w stan pracy ustalonej), niedopuszczalne jest pomijanie w instrukcji .TRAN maks. kroku obliczeń HMAX. Szacowanie jego wartości należy przeprowadzić w oparciu o stałe czasowe modelu obwodowego maszyny i okres wymuszeń na zaciskach maszyny (należy zajrzeć do notatek z metod numerycznych!!!). Użycie komendy .TRAN oraz .PROBE ilustruje następujący przykład:
*analiza czasowa zwarcia udarowego .TRAN 2E-6 2.0 0.0 0.001 UIC ***** rejestrowane przebiegi analizy czasowej zwarcia udarowego ** .PROBE V(100) V(E_Uas) V(E_Ubs) V(E_Ucs) + I(G_Ias) I(G_Ibs) I(G_Ics) + I(E_Uas) I(E_Ubs) I(E_Ucs) + V([qs_r]) V([ds_r]) V(E_Eqs_r) V(E_Eds_r) I(Rsq) I(Rsd) + I(Lmq) I(Lmd) I(Rkq) I(Rkd) I(Rfd) V([fd_r]) + V([Te]) I(R_Bm) V([m]) V([tr]) +V([LAqs_r]) V(LAds_r]) +V([LAmq_r]) V(LAmd_r]) V([LAfd_r])
♦ Plik wsadowy programu PSPICE — plik Syn-a.cir
W oparciu o analog elektryczny maszyny synchronicznej na rys. 8 oraz powyższe rozważania sformułowano następujący plik wsadowy programu PSPICE.
PRADNICA SYNCHRONICZNA: ZWARCIE UDAROWE przy Wr=const ****** Dane znamionowe prądnicy wg P.G. (ICEM'88)******************* * Generator synchroniczny typu GD8-1000-50 * moc pozorna, czynna, napięcie i prąd stojana

22 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
* Sn=1000kVA Pn=950kW Usn=3x400V(Y) Isn=1445A * prąd i napięcie wzbudzenia * Ifdn=51A Ufdn=80V * częstotliwość, liczba biegunów, moment bezwładności * fen=50Hz P=8 Jn=34.75kgm2 * Podstawienie wartości danych znamionowych .PARAM Usn=400 Isn=1445 Pn=950e3 fen=50 Jn=34.75 P=8 * Podstawienie wartości parametrów obwodowych w jednostkach względnych w [%] .PARAM rs_=1.44 rkq_=5.64 rkd_=3.96 rfd_=0.188 .PARAM Xls_=7.0 Xlkq_=8.89 Xlkd_=8.82 Xlfd_=18.7 Xmq_=57.2 Xmd_=115.6 ****************************************************************** ******************************************************************** ***** Pomocnicze stale liczbowe ************************************** .PARAM Pi=3.14159 p1=Pi/2 p2=2*Pi/3 ******Przeliczanie wartosci wzglednych parametrow na ich wartosci bezwzgledne .PARAM We=2*Pi*fen ;pulsacja napięcia = predkosci elektrycznej pola wirujacego ***** Wielkosci obliczone ******************************************** .PARAM Zn=Usn/sqrt(3)/Isn ;impedancja znamionowa .PARAM rs=rs_*Zn/100 rkq=rkq_*Zn/100 rkd=rkd_*Zn/100 rfd=rfd_*Zn/100 .PARAM Lls=Zn*Xls_/100/We Llkq=Zn*Xlkq_/100/We Llkd=Zn*Xlkd_/100/We .PARAM Llfd=Zn*Xlfd_/100/We Lmq=Zn*Xmq_/100/We Lmd=Zn*Xmd_/100/We ******************************************************************** ***** Okreslenie wymuszen elektrycznych ******************************** .PARAM Usm=SQRT(2/3)*Usn ;amplituda napiecia fazwego .PARAM Wr=We ;predkosc elektryczna wirnika = pulsacji napięcia .PARAM Ifd0_r=Usm/(Lmd*Wr) Ufd0_r=rfd*Ifd0_r * Ufd0_r- napiecie zasilania obwodu wzbudzenia wymuszajace prad wzbudzenia Ifd0_r, * ktory wzbudza w stanie jalowym maszyny napiecie znamionowe * na zaciskach uzwojenia stojana ***** Pomocnicze parametry zadane *********************************************** .PARAM k_Ufd=1 k_Rfd=1. * k_Ufd - wspolczynnik doboru napiecia zasilania obwodu wzbudzenia; * k_Rfd - wspolczynnik powiekszenia rezystancji obwodu wzbudzenia; * przy czym: .PARAM Ufd_r=k_Ufd*Ufd0_r Rfd_c=k_Rfd*rfd * gdzie: Ufd_r - aktualne napiecia zasilania obwodu wzbudzenia; * Rfd_c - aktualna rezystancja calkowita obwodu wzbudzenia; ***************************************************** *Parametry i wymuszenia układu mechanicznego .PARAM Tmn=Pn/(Wr/(P/2)) ; znamionowy moment napedowy .PARAM Bm=0.01*Pn/(Wr*2/P*We*2/P) ; wspolczynnik tarcia * celem utrzymania stalej predkosci obrotowej w stanie zwarcia * wprowadzono 1e10 krotne powiekszenie momentu bezwladnosci wirnika .PARAM J=Jn*1e10 ********************************************************************** *****Warunki poczatkowe zwarcia *********************************************** *poczatkowe polozenie katowe wirnika tr0 .PARAM tr0=0 * oznacza, ze dla t=0 napiecie w fazie as osiaga wartosc maksymalna: Uas(0)=Usm **************************************************************************** *Model lacznika typu SWITCH sterowanego napieciowo .MODEL SMOD VSWITCH (RON=1E-4 ROFF=1E4 VON=1 VOFF=0) *gdzie: SMOD przyjeta nazwa modelu lacznika, gdzie VSWITCH ozancza lacznik sterowany napieciowo *laczniki typu SWITCH oznaczone jako: Sas, Sbs, Scs, Sqs_r, Sds_r, *zwieraja pary zaciskow qs_r i 0 oraz ds_r i 0 obwodow stojana w osiach qd *****Sterowanie chwila wlaczenia i wylaczenia zwarcia maszyny *zalaczanie zwarcia dla chwili tz=0.035s gdy w fazie as napiecie Uas(tz)=0, *tzn. po wykonaniu przez wirnik 1 i 3/4 obrotu * tz - chwila (moment) wlaczenia zwarcia * tw - chwila wylaczenia zwarcia .PARAM tz=0.035 tw=3 *napiecie typu PULSE sterujace lacznikami: Sas Sbs Scs Sqs_r Sds_r VS 100 0 PULSE(0 1 tz 0 0 tw 100)

Mieczysław RONKOWSKI 23
RS 100 0 1 ;rezystancja pomocnicza *********************************************************************************************** * sformulowanie fukncji transformacji zmiennych fq fd (bez sklad zerowej) ukladu osi wirnika qd * do zmiennych rzeczywistycgh fa fb fc ukladu osi stojana as bs cs wg row. (17a) .FUNC fqd_fabc(fq,fd,tr,f1) fq*COS(tr+tr0-f1) + fd*SIN(tr+tr0-f1) ********************************************************************************* ***** odwzorowanie topologii obwodow ********************************* * transformacja napiec dwuosiowych Uqs_r Uds_r do trojosiowych Uas Ubs Ucs wg row (17b) * sterowane zrodla napiecia modelujace napiecia na zaciskach stojana Uas Ubs Ucs E_Uas as as1 VALUE=fqd_fabc(V(qs_r), V(ds_r), V(tr), 0) E_Ubs bs bs1 VALUE=fqd_fabc(V(qs_r), V(ds_r), V(tr), p2) E_Ucs cs cs1 VALUE=fqd_fabc(V(qs_r), V(ds_r), V(tr), -p2) * transformacja pradow dwuosiowych Iqs_r Ids_r do trojosiowych Ias Ibs Ics wg row (18b) * sterowane zrodla pradowe modelujace prady fazowe uzwojen stojana Ias Ibs Ics G_Ias 0 as1 VALUE=fqd_fabc(I(V_Iqs_r), I(V_Ids_r), V(tr), 0) G_Ibs 0 bs1 VALUE=fqd_fabc(I(V_Iqs_r), I(V_Ids_r), V(tr), p2) G_Ics 0 cs1 VALUE=fqd_fabc(I(V_Iqs_r), I(V_Ids_r), V(tr), -p2) *laczniki Sas Sbs Scs Sas as Z 100 0 SMOD Sbs bs Z 100 0 SMOD Scs cs Z 100 0 SMOD RN Z 0 1E10 ;rezystancja pomocnicza modeluje przewod zerowy o nieskonczenie duzej rezystancji *laczniki Sqs_r Sds_r Sqs_r qs_r 0 100 0 SMOD Sds_r ds_r 0 100 0 SMOD * Parametry obwodowe: * rezystancja uzwojenia stojana Rsq qs_r 5 rs Rsd ds_r 6 rs * indukcyjnosc rozproszenia obwodu stojana Llsq 9 11 Lls IC=0 Llsd 10 12 Lls IC=0 * indukcyjnosc magnesowania osi q Lmq 11 13 Lmq IC=0 * indukcyjnosc magnesowania osi d Lmd 12 14 Lmd IC=Ufd_r/Rfd_c ;poczatkowy prad wzbudzenia wg wzoru (36) * indukcyjnosc rozproszenia klatek tlumiacych Llkq 15 11 Llkq IC=0 Llkd 16 12 Llkd IC=0 * rezystancja klatek tlumiacych Rkq 0 15 rkq Rkd 0 16 rkd * indukcyjnosc rozproszenia uzwojenia wzbudzenia Llfd 26 12 Llfd IC=Ufd_r/Rfd_c ;poczatkowy prad wzbudzenia wg wzoru (36) * rezystancja calkowita obwodu wzbudzenia Rfd fd_r 26 Rfd_c * Napiecie zasilania obowdu wzbudzenia V_Ufd_r fd_r 0 Ufd_r ;wartosc poczatkowa * pomiary pradow V_Iqs_r 7 9 0 ;pradu stojana Iqs_r w osi q V_Ids_r 8 10 0 ;pradu stojana Ids_r w osi d V_Imq_r 13 0 0 ;pradu magnesujacego Imq_r w osi q V_Imd_r 14 0 0 ;pradu magnesujacego Imd_r w osi d * SEM rotacji wg row. (4a), (5a), (7) oraz (8) E_Eqs_r 5 7 VALUE=I(V_Wr)*(Lls*I(V_Ids_r)+Lmd*I(V_Imd_r)) E_Eds_r 8 6 VALUE=I(V_Wr)*(Lls*I(V_Iqs_r)+Lmq*I(V_Imq_r)) * Obwod mechaniczny * moment elektromagnetyczny wg row. (14c) po rozpisaniu na skladowe osiowe q i d jak w row. (1) i (2) E_Te Te 0 VALUE=1.5*(P/2)*(Lmd*I(V_Imd_r)*I(V_Iqs_r) - Lmq*I(V_Imq_r)*I(V_Ids_r)) * moment bezwladnosci L_J Te 19 (2/P)*J IC=We ; zgodnie z zalozeniem Wr=We * wspolczynnik tarcia R_Bm 19 20 (2/P)*Bm

24 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
* pomiar elektrycznej predkosci katowej wirnika V_Wr 20 m 0 * moment obciazenia dla analizy .TRAN V_Tm m 0 0 *V_Tm m 0 PULSE (0 2*TL 0.2 0 0 2 3) * Calkowanie predkosci katowej wg row. (19) * elektryczna predkosc katowa wirnika G_Wr 0 tr VALUE=I(V_Wr) RWr tr 0 1E6 CWr tr 0 1 IC=0 *obliczanie strumieni sprzezonych stojana LAqs_r LAds_r * wg row. (1) i (2) G_LAqs_r 0 LAqs_r VALUE=(Lls*I(V_Iqs_r)+Lmq*I(V_Imq_r)) R_LAqs_r LAqs_r 0 1 G_LAds_r 0 LAds_r VALUE=(Lls*I(V_Ids_r)+Lmd*I(V_Imd_r)) R_LAds_r LAds_r 0 1 *struminie magnesowania LAmq_r LAmd_r G_LAmq_r 0 LAmq_r VALUE=Lmq*I(V_Imq_r) R_LAmq_r LAmq_r 0 1 G_LAmd_r 0 LAmd_r VALUE=Lmd*I(V_Imd_r) R_LAmd_r LAmd_r 0 1 *strumien wzbudzenia G_LAfd_r 0 LAfd_r VALUE=-Llfd*I(V_Ufd_r) + Lmd*I(V_Imd_r) R_LAfd_r LAfd_r 0 1 * analiza czasowa stanu zwarcia udarowego .TRAN 2E-6 2.0 0 0.001 UIC ***** rejestrowane przebiegi analizy czasowej zwarcia udarowego ** .PROBE V(100) V(E_Uas) V(E_Ubs) V(E_Ucs) + I(G_Ias) I(G_Ibs) I(G_Ics) + I(E_Uas) I(E_Ubs) I(E_Ucs) + V([qs_r]) V([ds_r]) V(E_Eqs_r) V(E_Eds_r) I(Rsq) I(Rsd) + I(Lmq) I(Lmd) I(Rkq) I(Rkd) I(Rfd) V([fd_r]) + V([Te]) I(R_Bm) V([m]) V([tr]) +V([LAqs_r]) V(LAds_r]) +V([LAmq_r]) V(LAmd_r]) V([LAfd_r]) ************************************************************ .END
6. WYBRANE WYNIKI SYMULACJI ZWARCIA UDAROWEGO MASZY NY SYNCHRONICZNEJ
Jako przykład ilustrujący rozpatrzono symulację zwarcia udarowego maszyny synchronicznej przy założeniu wartości prądu wzbudzenia i stałej prędkości kątowej wirnika, które generują napięcie znamionowe na zaciskach stojana.
Badania symulacyjne zwarcia udarowego wykonano z zastosowaniem podanego wyżej pliku wsadowego programu PSPICE — plik Syn-a.cir.
Wybrane wyniki symulacji zwarcia udarowego maszyny synchronicznej o mocy znamionowej 1000 kVA — przy założeniu, że w chwili wystąpienia zwarcia wartość napięcie stojana miała wartość równą zero — pokazano na rys.9 do 14.
Podczas trwania zwarcia udarowego wyróżnia się trzy charakterystyczne stany: • stan podprzejściowy, w którym zarówno SMM klatki tłumiącej (prąd klatki i’ r
kd) jaki i przyrost SMM wzbudzenia (przyrost prądu wzbudzenia ponad wartość początkową I’ r
fd0) przeciwdziała SMM stojana (wymuszeniu twornika);
• stan przejściowy, w którym zmieniającej się SMM stojana przeciwdziała tylko przyrost prądu wzbudzenia ponad wartość początkową I’ r
fd0 (prąd w klatce zmniejsza swą wartość do zera — przestaje płynąć) • stan ustalony, w którym prąd wzbudzenia osiąga wartość początkową I’ r
fd0 (ustalona SMM twornika przeciwstawia się ustalonej SMM wzbudzenia).
Przedziały czasowe tych trzech stanów zostały wyróżnione w przebiegach czasowych prądów stojan i wirnika na rys. 10.
Czasy trwania stanów podprzejściowego i przejściowego zależą od stałych czasowych maszyny synchronicznej, które są definiowane następująco:
stała czasowa podprzejściowa stanu zwarcia w osi podłużnej d

Mieczysław RONKOWSKI 25
ms 0.11)(
1 =′+′+
′+′
′=′′
lfdlslfdmdlsmd
lfdlsmdlkd
kded XXXXXX
XXXX
rT
ω (44)
stała czasowa przejściowa stanu zwarcia w osi podłużnej d
ms 4.428)(
1 =+
+′′
=′lsmd
lsmdlfd
fded XX
XXX
rT
ω (45)
Czas zanikania dodatkowego prądu wzbudzenia ponad jego wartość początkową I’ rfd0 można przyjąć w
przybliżeniu równy 4 T’d ≅ 4* 428.4 = 1713.6 ms. W wyniku symulacji (rys. 17) otrzymano czas trwania równo około 1964.9 - 35 ≅ 1929.9 ms.
Wartość udarowego prądu zwarcia wyznacza się z zależności:
ud
su
d
omaszud k
X
Uk
X
Ei
′′=
′′=
3
2 (46)
gdzie, X’’ d - reaktancja synchroniczna podprzejściowa osi podłużnej, ku - współczynnik udaru, który uwzględnia wartość początkową składowej aperiodycznej prądu zwarcia stojana
i może osiągnąć wartość w przedziale 21 ≤≤ uk .
Dla przebiegu na rys. 17 wartość napięcia w chwili zwarcia była równa zero, czyli można przyjąć, że 2=uk .
Zatem wartość udarowa prądu zwarcia badanej maszyny wynosi:
kA 146.3220203.0 3
4002 =⋅
⋅=aszudi (47)
Polska Norma określa wartość udarową prądu zwarcia wzorem
8.1 3
205.1
d
snszud
X
Ui
′′= (48)
i dopuszcza wartość
15100
05.18.1
2]j.w.[
%≤
′′⋅=
⋅=
dsn
szudszud XI
ii (49)
Dla badanej prądnicy wartość ta wynosi odpowiednio
882.141002.71
05.18.1]j.w.[ =⋅=szudi (50)
i nie przekracza wartości dopuszczalnej normą. Wartości amplitudy składowej przejściowej prądu zwarcia wynosi
kA 827.8037.0 3
4002
3
2 =⋅⋅=
′=′
d
snaszm
X
UI (51)
Wartości amplitudy ustalonego prądu zwarcia wynosi
kA 665.11962.0 3
4002
3
2 =⋅
⋅==d
snaszum
X
UI (52)
W wyniku symulacji (rys. 17) otrzymano następujące wartości:
kA 516.23=aszudi (53)
507.1114452
10516.23]j.w.[
3=
⋅⋅=szudi (54)
kA 7944.6=′aszmI (55)
kA 7279.1=aszumI (56)
Zatem można stwierdzić, że wyniki otrzymane na drodze symulacji nie różnią się istotnie od wyników uzyskanych na metodą analityczną.

26 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
WYNIKI ANALIZY .TRAN (POSTPROCESOR GRAFICZNY .PROBE) a)
0s 0.5s 1.0s 1.5s 2.0s
TimeV(E_Uas)
400V
200V
0V
-200V
-400V
Date/Time run: 12/18/100 09:08:37 Temperature: 27.0
u as
b)
0s 0.5s 1.0s 1.5s 2.0s
TimeI(E_Uas)
30kA
20kA
10kA
0A
-10kA
iasz
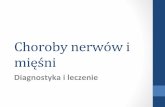
Rys.9. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: a) napięcie fazowe uas, b) prąd fazowy stojana iasz w układzie osi naturalnych as bs cs

Mieczysław RONKOWSKI 27
a)
0s 0.5s 1.0s 1.5s 2.0s
TimeI(Rfd)
15kA
10kA
5kA
0A
Date/Time run: 12/18/100 09:08:37 Temperature: 27.0
= 1.7678 kA
fdi r'
fd0I r'
b)
0s 0.5s 1.0s 1.5s 2.0s
TimeI(Rkd)
20KA
10KA
0A
-10KA
I(Rkq)
10KA
0A
-10KA
Date/Time run: 12/18/100 09:08:37 Temperature: 27.0
Rys. 10. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: a) prąd uzwojenia wzbudzenia i’r
fd, b) prądy klatek i’rkq, oraz i’rkd w układzie osi wirujących qd

28 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
0s 0.4s 0.8s 1.2s 1.6s 2.0s
Time1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 V(Te) 2 I(R_Bm)
100k
50k
0
-50k
-100k
1
>>
300
200
100
0
2
-89.754 kNm
30.738 kNm
314.159 rad/s
Date/Time run: 12/27/100 13:49:52 Temperature: 27.0
T e
Nm rad/s
rω = const
Rys. 11. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: moment elektromagnetyczny Te oraz elektryczna prędkość kątowa wirnika ωr
0s 0.5s 1.0s 1.5s 2.0s
TimeV(E_Eds_r) 0
400V
0
-400V
- 4.1838 V- 767.501e-6 V
V(E_Eqs_r)
400V
0V
-400V
96.280 mV
326.599 V
Date/Time run: 12/27/100 13:49:52 Temperature: 27.0
Rys. 12. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów SEM rotacji uzwojenia stojana erqs oraz erds w układzie osi wirujących qd

Mieczysław RONKOWSKI 29
0s 0.5s 1.0s 1.5s 2.0s
TimeI(E_Uas) -I(Rsd)
40kA
20kA
0A
-20kA
= 1.7279 kA
= 1.7276 kA
I(Rsq)
20kA
0
-20kA
= - 40.655 A
Date/Time run: 12/27/100 13:49:52 Temperature: 27.0
dsi r
Iaszm
qsi r
Rys. 13. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów prądu uzwojenia stojana ir
qs oraz irds w układzie osi wirujących qd i prąd uzwojenia stojana iasz w układzie osi as bs cs
0s 0.5s 1.0s 1.5s 2.0s
Time-I(Rsd) I(Rfd)
25kA
20kA
15kA
10kA
5kA
0A
= 1.8472 kA
= 1.7422 kA
fdi r
dsi r
'
Rys. 14. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów prądu stojana irds oraz prąd uzwojenia wzbudzenia i’r
fd w układzie osi wirujących qd

30 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
0s 0.5s 1.0s 1.5s 2.0s
TimeV(LAmd_r)
2.0
1.0
0
62.348 mWb
1.0396 Wb
V(LAmq_r)
1.0
0
-1.0
-11.870 mWb -1.2809e-6 WbWb
Wb
mdrλλλλ
mqrλλλλ
Rys. 15. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów sprzężonych strumieni magnesujących (głównych) λr
mq oraz λrmd w układzie
osi wirujących qd
0s 0.5s 1.0s 1.5s 2.0s
TimeI(E_Uas) I(Rfd)
30kA
20kA
10kA
0A
-10kA
Date/Time run: 12/18/100 09:08:37 Temperature: 27.0
i fd'r
iasz
Rys. 16. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów prąd uzwojenia stojana iasz w układzie
osi as bs cs i prądu uzwojenia wzbudzenia i’rfd w układzie osi wirujących qd
a)

Mieczysław RONKOWSKI 31
0s 0.5s 1.0s 1.5s 2.0s
TimeI(E_Uas)
20kA
10kA
0
-10kA
-20kA
185.242 ms
stan nadprzej ściowy
stan przej ściowy
stan ustalony
iasz
= 23.516 kAiaszud
= 1.7279 kAIaszm= 6.7944 kAIaszm'
= 35 mst z 1964.9 ms
b)
0s 0.5s 1.0s 1.5s 2.0s
TimeI(Rkd)
-15kA
15kAI(Rkq)
-15kA
15kAI(Rfd)
0
15kA
0
0
1.7678 kA
i fd'r
i kq'r
i kd'r
fd0I r' = 1.7678 kA
Rys. 17. Wyniki analizy .TRAN. Zwarcie udarowe maszyny synchronicznej — charakterystyki w dziedzinie czasu: porównanie przebiegów a) prądu uzwojenia stojana iasz w układzie osi as bs cs, b) prądu uzwojenia
wzbudzenia i’rfd oraz prądów klatek i’rkq, oraz i’rkd w układzie osi wirujących qd

32 Ćwiczenie: BADANIE ZWARCIA UDAROWEGO MASZYNY SYNCHRONICZNEJ
7. LITERATURA 1. P.C. Krause: Analysis of Electric Machinery. Mc Graus - Hill Book Comp. New York, 1986. 2. W. Latek: Teoria maszyn elektrycznych. WNT, Warszawa, 1982. 3. Z. Manitius: Maszyny elektryczne cz. I, II. Skrypt PG, 1982, 1984. 4. W. Paszek: Stany nieustalone maszyn elektrycznych prądu przemiennego. WNT, Warszawa, 1986. 5. S. Roszczyk: Teoria maszyn elektrycznych. WNT, Warszawa, 1979. 6. Ronkowski M., Michna M., Kostro G., Kutt F.: Maszyny elektryczne wokół nas: zastosowanie, budowa,
modelowanie, charakterystyki, projektowanie. (e-skrypt). Wyd. PG, Gdańsk, 2011. http://pbc.gda.pl/dlibra/docmetadata?id=16401&from=&dirids=1&ver_id=&lp=2&QI=
7. M. Ronkowski: Szkice do wykładów z przedmiotu Systemy elektromechaniczne. Katedra Energoelektroniki i Maszyn Elektrycznych. WEiA. PG, Gdańsk, 2013. (www.ely.pg.gda.pl/ e-mechatronika).
8. P. Zimny, K. Karwowski: SPICE klucz do elektrotechniki. Instrukcja, program, przykłady. Skrypt PG, 1993.
8. ZADANIE
Dla danych katalogowych maszyny synchronicznej wykonać analizę .TRAN zwarcia udarowego.
Stan pracy przed zwarciem maszyny: bieg jałowy, znamionowa prędkość kątowa wirnika (niezmienna w czasie zwarcia)
Nr zada. Początkowe kątowe położenie
wirnika θθθθr (0) = tr0
[rad elektr.]
Napięcie wzbudzenia (współczynnik doboru napięcia
wzbudzenia k_Ufd)
[ - ]
Rezystancja wzbudzenia (współczynnik powiększenia
rezystancji wzbudzenia k_Rfd)
[ - ] 1 0 1.2 1 2 ππππ/2 1.2 1 3 0 1.2 1.2 4 ππππ/2 1.2 1.2 5 0 1.75 1.75 6 0 2.0 2.0 7 0 2.0 2.0
Założyć czas załączenia zwarcia tz = 0.035 s oraz czas wyłączenia zwarcia tw = 3s
9. SPRAWOZDANIE
Opracowanie sprawozdania powinno zawierać: • stronę tytułową wg następującego układu:
POLITECHNIKA GDAŃSKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA ENERGOELEKTRONIKI I MASZYN ELEKTRYCZNYCH
SYSTEMY ELEKTROMECHANICZNE PROJKET
Kierunek Elektrotechnika Studia stacjonarne 2-ego stopnia, semestr 1 ĆWICZENIE 4A DYNAMIKA MASZYNY SYNCHRONICZNEJ BADANIE ZWARCIA UDAROWEGO ZASTOSWANIE SYMULATORA OBWODÓW PSPICE Opracowali: Imię i nazwisko: .............................................................. .............................................................. Nr grupy laboratoryjnej/dziekańskiej: Data oddania sprawozdania:
• nr, dane katalogowe i dane obwodowe badanej maszyny synchronicznej; • nr i treść zadania; • określenie wymuszeń elektrycznych i mechanicznych (należy podać odpowiadające im fragmenty programu
PSPICE);

Mieczysław RONKOWSKI 33
• określenie warunków początkowych (wartości prądów indukcyjności i napięć stojana i wzbudzenia, należy podać odpowiadające im fragmenty programu PSPICE);
• obliczenia stałych czasowych modelu obwodowego dla danej maszyny synchronicznej; • oszacowanie maks. kroku obliczeń HMAX i czasu końca analizy TSTOP; • „ręczne” oszacowanie wartości udarowych i ustalonych prądów oraz porównanie ich wartości z wynikami
otrzymany na drodze symulacyjnej; • wybrane przebiegi wielkości, które są istotne (wg piszącego sprawozdanie) dla przeprowadzenia analizy
zwarcia udarowego maszyny synchronicznej; • uzasadnienie fizyczne uzyskanych wyników (powinno być napisane w stylu inżynierskim !!! —- tzn.
minimum j ęzyka tekstowego a maksimum języka graficznego i symbolicznego); • krótka dyskusja wpływu założeń upraszczających modelu maszyny na uzyskane wyniki obliczeń; • wykaz literatury wykorzystanej przy pisaniu sprawozdania; • załącznik w postaci dyskietki zawierającej skonstruowany plik wsadowy programu PSPICE.