Wyznaczenie momentu bezwładno ści przy u życiu wahadła ...wysmolek/Mechanika/wyklad22.pdf · H....
38
Wyznaczenie momentu bezwladności przy użyciu wahadla torsyjnego
Transcript of Wyznaczenie momentu bezwładno ści przy u życiu wahadła ...wysmolek/Mechanika/wyklad22.pdf · H....
Wyznaczenie momentu
bezwładności przy użyciu
wahadła torsyjnego

Wahadło torsyjne
2r
Równanie ruchu obrotowego krążka
Mdt
dI =
2
2
0
α
α
drut
00
2
2
=+ αα
I
D
dt
d
I0 – moment bezwładności
krążka
M – moment siły
D – moment kierującyαDM −=
)sin( ϕωα += tA
0I
D=ω
Równanie oscylatora
harmonicznego
1) Informacja o momencie bezwładności
2) Informacja o własnościach sprężystych
drutu
2R
D
IT 0
0 2π=
Częstość kołowa
Okres drgań
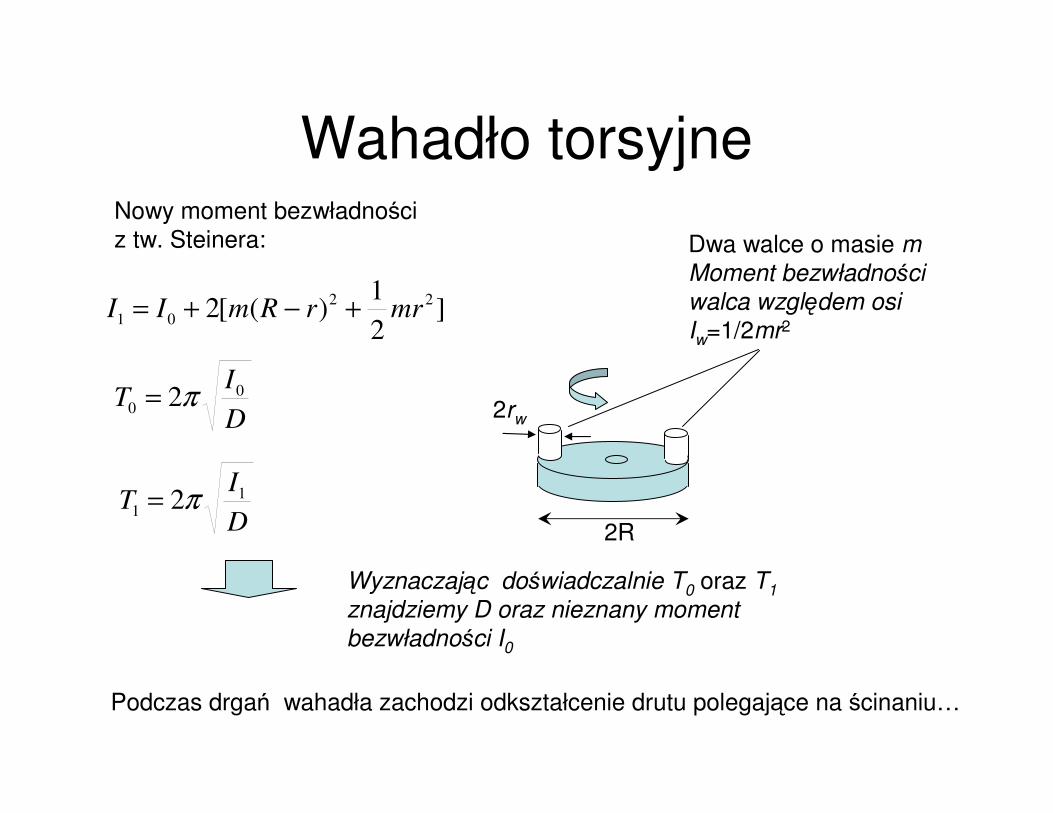
Wahadło torsyjne
2R
Dwa walce o masie m
Moment bezwładności
walca względem osi
Iw=1/2mr2
2rw
Nowy moment bezwładności
z tw. Steinera:
]2
1)([2 22
01 mrrRmII +−+=
D
IT 0
0 2π=
D
IT 1
1 2π=
Wyznaczając doświadczalnie T0 oraz T1
znajdziemy D oraz nieznany moment
bezwładności I0
Podczas drgań wahadła zachodzi odkształcenie drutu polegające na ścinaniu…
Odkształcenia sprężyste
Sprężystość (elastyczność) – własność powodująca, że odkształcone ciało
dąży do stanu początkowego.
Dla idealnie sprężystych ciał naprężenia w nich wywoływane są
jednoznacznymi funkcjami odkształceń.
Przy niewielkich odkształceniach własności ciał stałych
można opisywać traktując je jak ciała idealnie sprężyste, wtedy, jak to
wykrył R. Hooke dla prostych odkształceń, odkształcenie jest
proporcjonalne do naprężenia (sprawdźmy czy ono działa…).
… a potem zajmijmy się przypadkiem odkształcenia postaci bez zmiany
objętości jakim jest tzw. ścinanie…
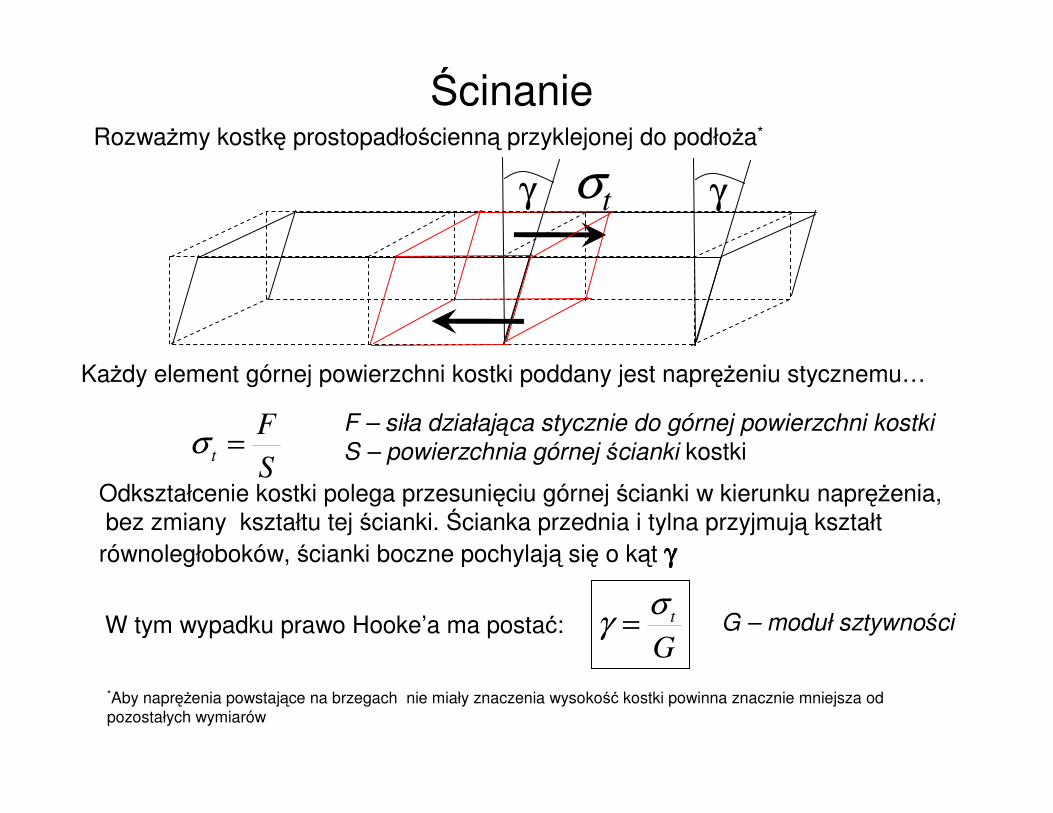
ŚcinanieRozważmy kostkę prostopadłościenną przyklejonej do podłoża*
γγ σt
Każdy element górnej powierzchni kostki poddany jest naprężeniu stycznemu…
S
Ft
=σF – siła działająca stycznie do górnej powierzchni kostki
S – powierzchnia górnej ścianki kostki
Odkształcenie kostki polega przesunięciu górnej ścianki w kierunku naprężenia,
bez zmiany kształtu tej ścianki. Ścianka przednia i tylna przyjmują kształt
równoległoboków, ścianki boczne pochylają się o kąt γγγγ
W tym wypadku prawo Hooke’a ma postać:G
tσ
γ = G – moduł sztywności
*Aby naprężenia powstające na brzegach nie miały znaczenia wysokość kostki powinna znacznie mniejsza od
pozostałych wymiarów
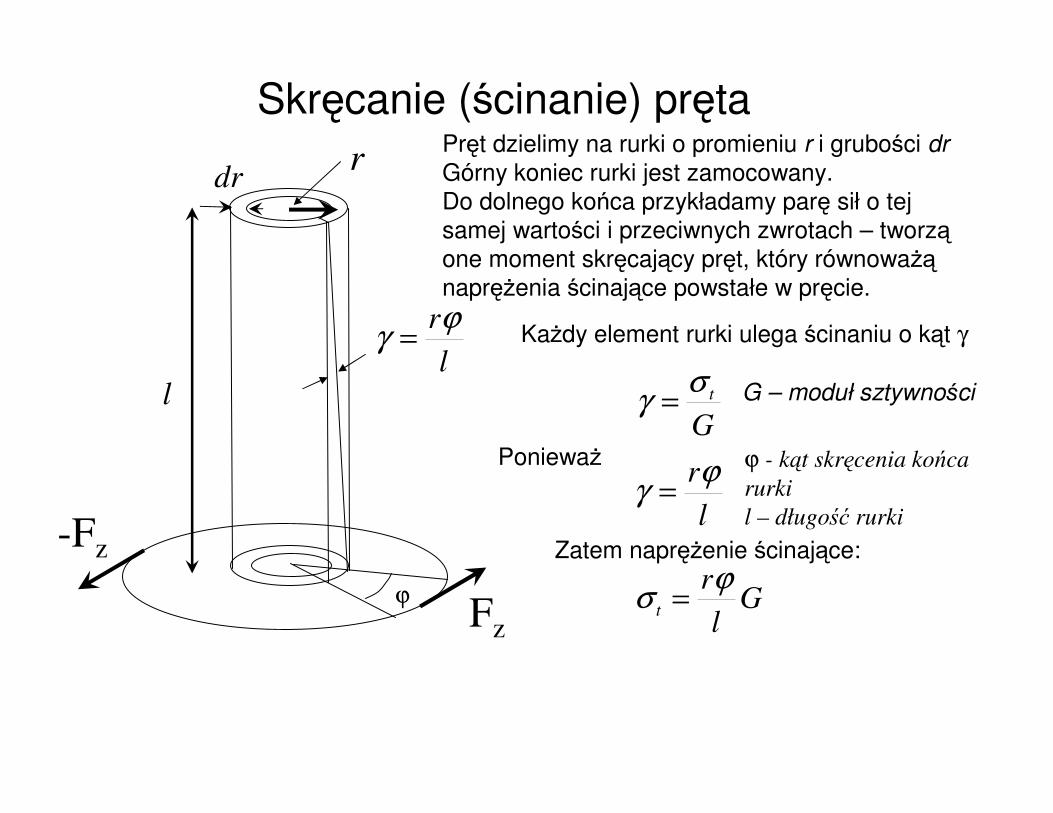
Skręcanie (ścinanie) pręta
drr
ϕ
l
rϕγ =
l
Fz
-Fz
Pręt dzielimy na rurki o promieniu r i grubości dr
Górny koniec rurki jest zamocowany.
Do dolnego końca przykładamy parę sił o tej
samej wartości i przeciwnych zwrotach – tworzą
one moment skręcający pręt, który równoważą
naprężenia ścinające powstałe w pręcie.
Każdy element rurki ulega ścinaniu o kąt γ
G
tσγ = G – moduł sztywności
Ponieważ
l
rϕγ =
ϕ - kąt skręcenia końca
rurki
l – długość rurki
Zatem naprężenie ścinające:
Gl
rt
ϕσ =

Skręcanie pręta
drrl
GdM
drrGl
rdM
rdrrdM
rSdM
FrdM
t
t
3
2
2
2
2
ϕπ
πϕ
πσ
σ
=
=
=
∆=
∆=
∆ F – siła styczna
∆S – powierzchnia przekroju rurki
Moment sił sprężystości
równoważący moment sił zewnętrznych:
Sumując przyczynki od rurek o różnych promieniach
dostajemy całkowity moment sił sprężystości równoważący
moment sił zewnętrznych
ϕϕπ
ϕπ
DR
l
Gdrr
l
GM === ∫ 2
2 4
R
0
3 Jl
GR
l
GD ==
2
4π
D – moment kierujący
J – geometryczny moment bezwładności ∫∫=S
dSrJ2
S
Ft
∆
∆=σ z definicji
naprężenia ścinającego
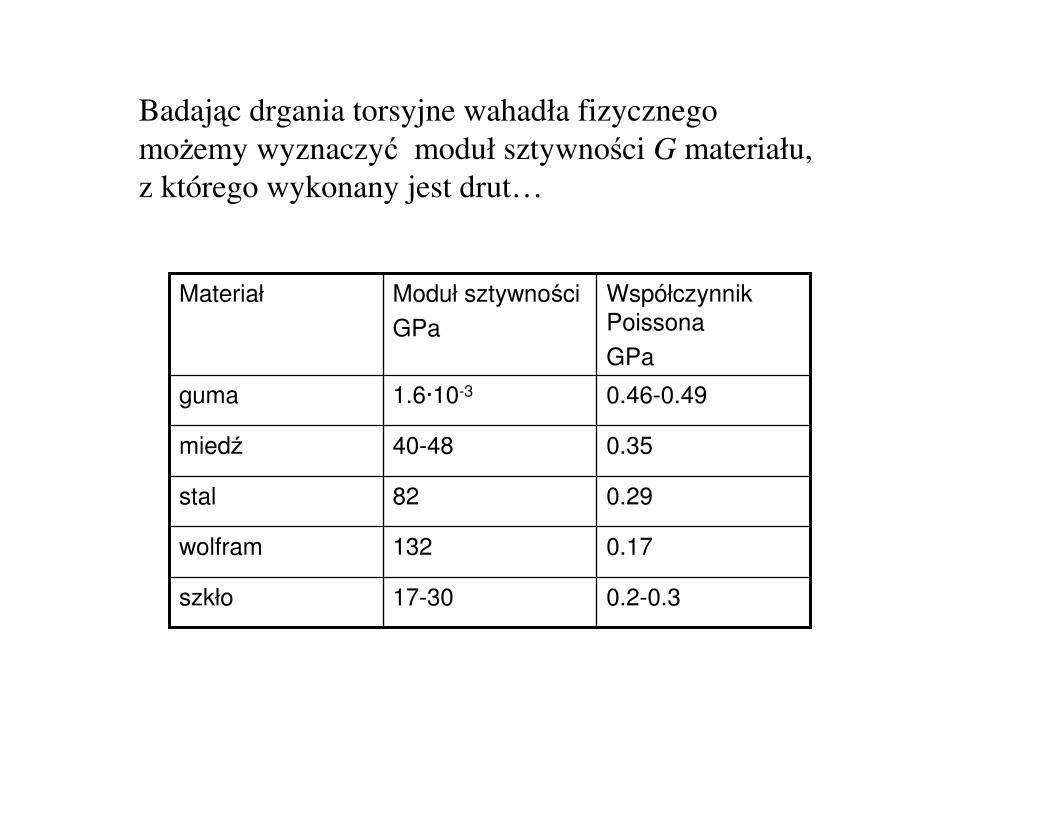
0.2-0.317-30szkło
0.17132wolfram
0.2982stal
0.3540-48miedź
0.46-0.491.6·10-3guma
Współczynnik
Poissona
GPa
Moduł sztywności
GPa
Materiał
Badając drgania torsyjne wahadła fizycznego
możemy wyznaczyć moduł sztywności G materiału,
z którego wykonany jest drut…
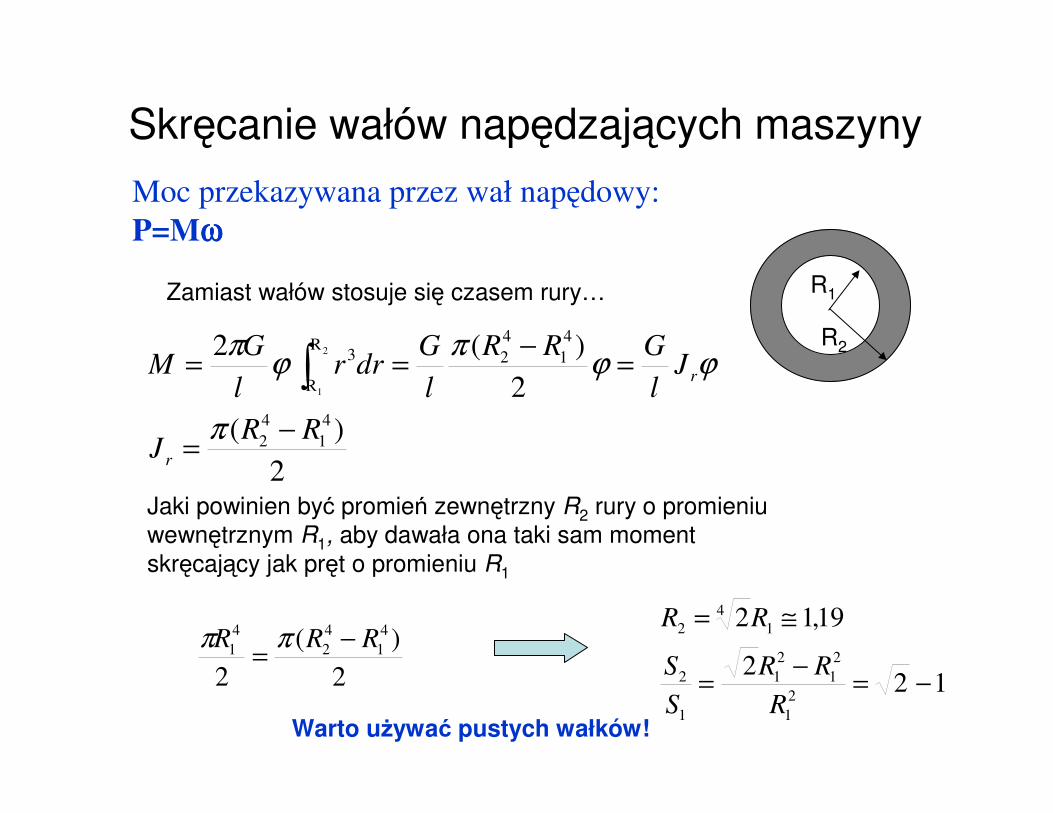
Skręcanie wałów napędzających maszyny
Moc przekazywana przez wał napędowy:
P=Mωωωω
Zamiast wałów stosuje się czasem rury…
2
)(
2
)(
2
4
1
4
2
4
1
4
2R
R
32
1
RRJ
Jl
GRR
l
Gdrr
l
GM
r
r
−=
=−
== ∫π
ϕϕπ
ϕπ
Jaki powinien być promień zewnętrzny R2 rury o promieniu
wewnętrznym R1, aby dawała ona taki sam moment
skręcający jak pręt o promieniu R1
R2
R1
2
)(
2
4
1
4
2
4
1RRR −
=ππ
122
19,12
2
1
2
1
2
1
1
2
1
4
2
−=−
=
≅=
R
RR
S
S
RR
Warto używać pustych wałków!
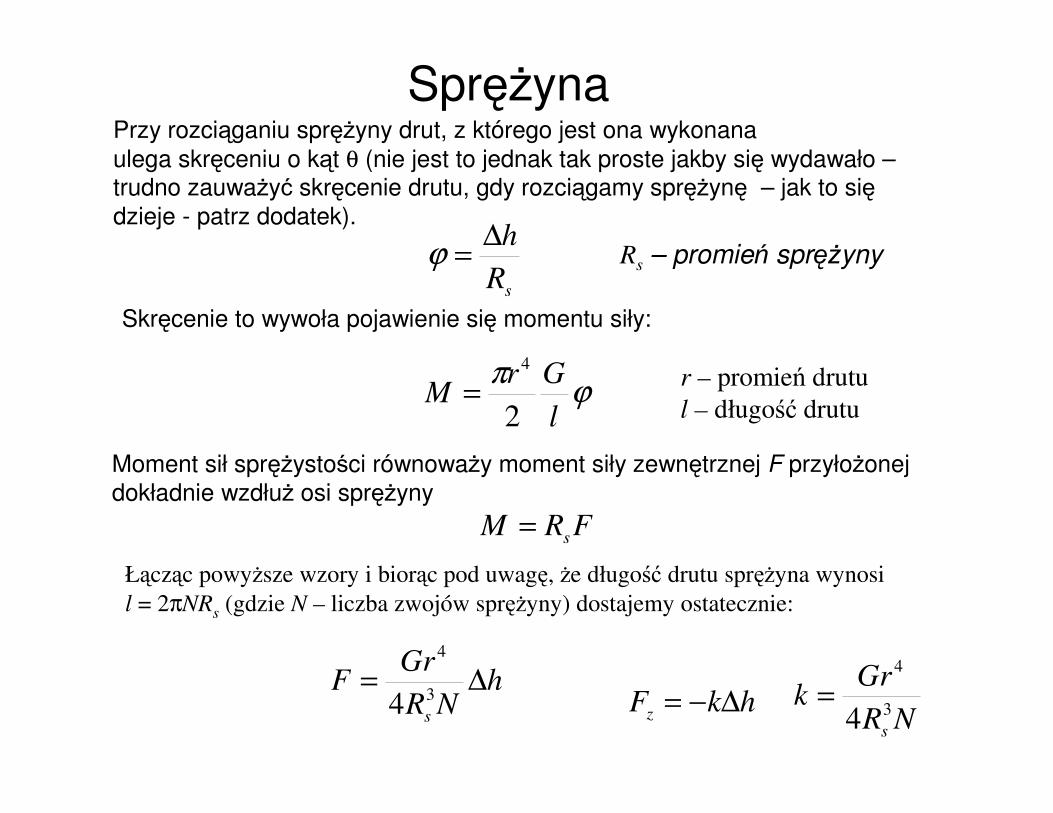
SprężynaPrzy rozciąganiu sprężyny drut, z którego jest ona wykonana
ulega skręceniu o kąt θ (nie jest to jednak tak proste jakby się wydawało –trudno zauważyć skręcenie drutu, gdy rozciągamy sprężynę – jak to się
dzieje - patrz dodatek).
sR
h∆=ϕ Rs – promień sprężyny
Skręcenie to wywoła pojawienie się momentu siły:
FRMs
=
Moment sił sprężystości równoważy moment siły zewnętrznej F przyłożonej
dokładnie wzdłuż osi sprężyny
ϕπ
l
GrM
2
4
=r – promień drutu
l – długość drutu
hNR
GrF
s
∆=3
4
4
Łącząc powyższe wzory i biorąc pod uwagę, że długość drutu sprężyna wynosi
l = 2πNRs (gdzie N – liczba zwojów sprężyny) dostajemy ostatecznie:
hkFz
∆−=NR
Grk
s
3
4
4=

Rozciąganie drutu
Fn
l0l
ε=∆
=−
00
0
l
l
l
llWydłużenie względne:
Prawo Hooke’a (dla niewielkich odkształceń)
E
σε = σ- naprężenie normalne
E – moduł Younga
S
Fn=σ
0l
lSEF
n
∆=
Przewężenie względne:
d 0d
dt
∆−=ε
Dla odkształceń sprężystych:
µεε =t
µ - współczynnik Poissona
ε
εµ t=lub

Moduł Younga
72Szkło (SiO2,Na2CO3, CaCO3)
69Stop glinu (aluminium) (Al)
45Magnez (Mg)
30Beton wysokiejwytrzymałości (ściskany)
11Drewno dębowe(wzdłuż włókien)
2-4Nylon
3,0-3,5Polistyren (PS)
2,0-2,5Poli(tereftalan etylenu)(PET)
1-3Osłonka wirusa
1,5-2,0Polipropylen (PP)
0,2Polietylen (LDPE)
0,01-0,10guma
ModułYounga (E)
GPa
Materiał
Moduł Younga (E)
GPa
Materiał
1 050-1 200Diament (C)
>1 000Nanorurka[1]
47Cyna
16Ołów
84Cynk
100-115Miedź
450-650Węglik tytanu (TiC)
450Węglik krzemu(SiC)
400-410Wolfram (W)
190-210Żelazo kute i stal
150Kompozyt zwłókna węglowego
105-120Tytan (Ti)
103-124Mosiądz (Cu, Zn) iBrąz (Cu, Sn)
72Szkło (SiO2,Na2CO3, CaCO3)
http://pl.wikipedia.org/wiki/Modu%C5%82_Younga

Współczynnik Poissona
0,17Wolfram
0,2Kwarc
0,2-0,3Szkło
0,29Stal
0,34Aluminium
0,45Ołów
0,46-0,49Guma
µMateriał

Zmiana objętości pręta przy rozciąganiu
z
x
yl0
l0+∆l
r0 + ∆r
r0
Zmiana objętości przy rozciąganiu:
)21(22π
π)()(π
00
00
0
2
0
0
2
00
2
0
µσσ
µσ
−=
−=
∆+
∆≈
=−∆+∆+=∆
EV
EEV
r
r
l
llr
lrllrrV
Doświadczenie pokazuje, że ∆∆∆∆V/V≥≥≥≥0 µ ≤ 1/2
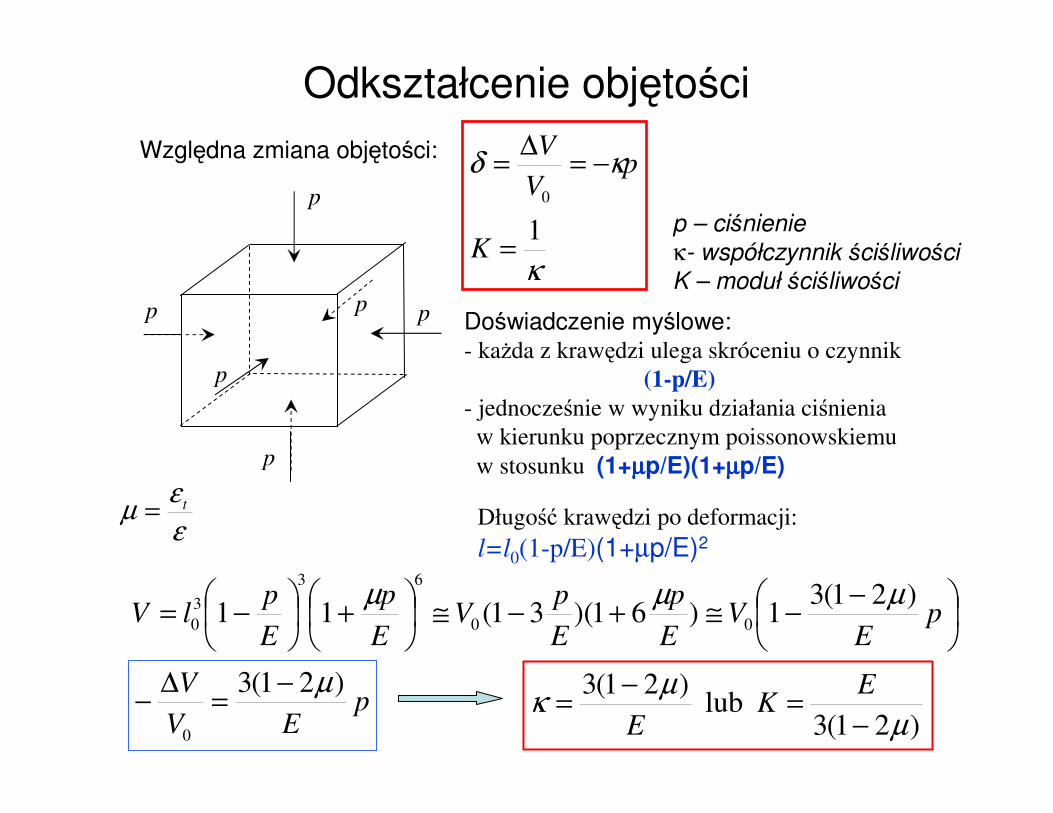
Odkształcenie objętości
p
p
p
p p
p
κ
κδ
1
0
=
−=∆
=
K
pV
V
p – ciśnienie
κ- współczynnik ściśliwości
K – moduł ściśliwości
Względna zmiana objętości:
Doświadczenie myślowe:- każda z krawędzi ulega skróceniu o czynnik
(1-p/E)
- jednocześnie w wyniku działania ciśnienia
w kierunku poprzecznym poissonowskiemu
w stosunku (1+µµµµp/E)(1+µµµµp/E)
ε
εµ t= Długość krawędzi po deformacji:
l=l0(1-p/E)(1+µp/E)2
−−≅+−≅
+
−= p
EV
E
p
E
pV
E
p
E
plV
)21(31)61)(31(11
00
63
3
0
µµµ
pEV
V )21(3
0
µ−=
∆−
)21(3 lub
)21(3
µ
µκ
−=
−=
EK
E
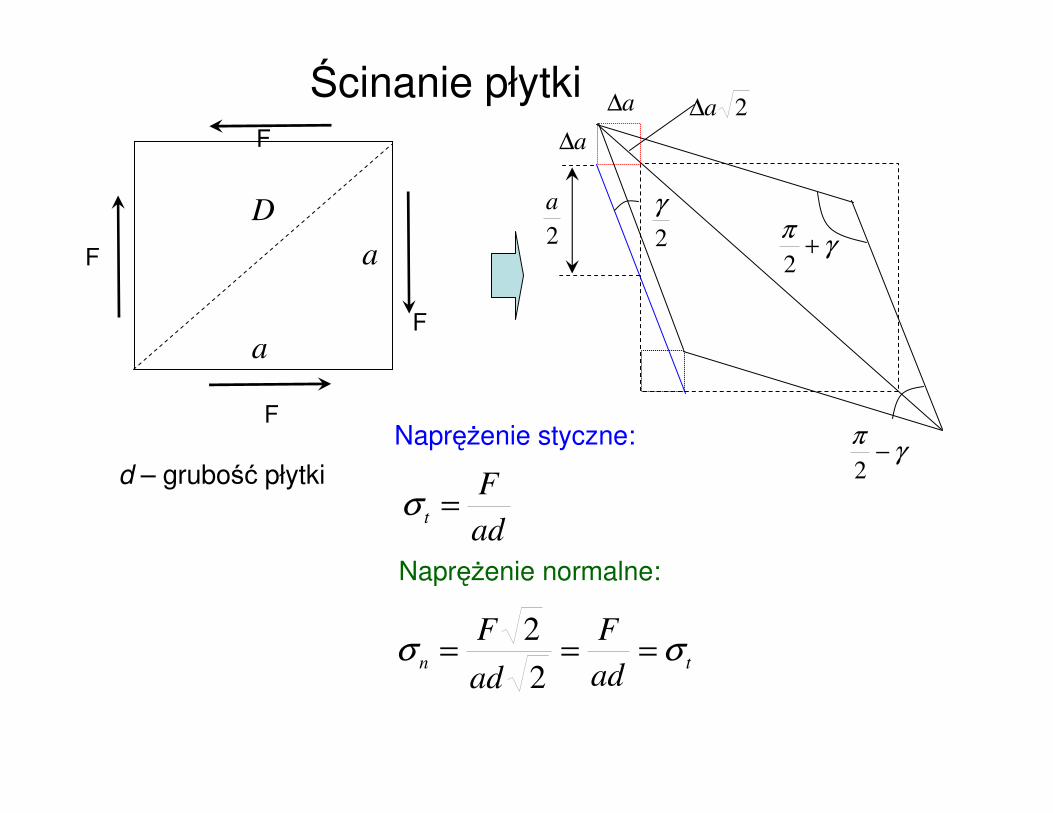
Ścinanie płytki
F
F
F
F
D
a
a
ad
Ft =σ
d – grubość płytki
2
γ
2
a
a∆
a∆
2a∆
γπ
+2
γπ
−2
Naprężenie styczne:
Naprężenie normalne:
tnad
F
ad
Fσσ ===
2
2

222 aD ∆=∆
Naprężenia normalne
rozciąga przekątną
a
a
a
a ∆=
∆=≅
2
2/22tg
γγ
Zmiana kąta
pomiędzy bokami G
tσ
γ = G – moduł
sztywności
Ga
at
2
2 σ=
∆
Zmiana długości przekątnej:
- rozciąganie „podłużne”
- rozciąganie poissonowskie
DE
DE
DE
D nnn σ
µσµ
σ +=+=∆
12
21
22 aE
a tσµ+
=∆
tEa
aσ
µ+=
∆ 12
tt
EGσ
µσ +=
1
2
)1(2 µ+=
EG
G mniejsze niż E (od 1/3 do 1/2 E) 1−>µograniczenie na
wsp. Poissona
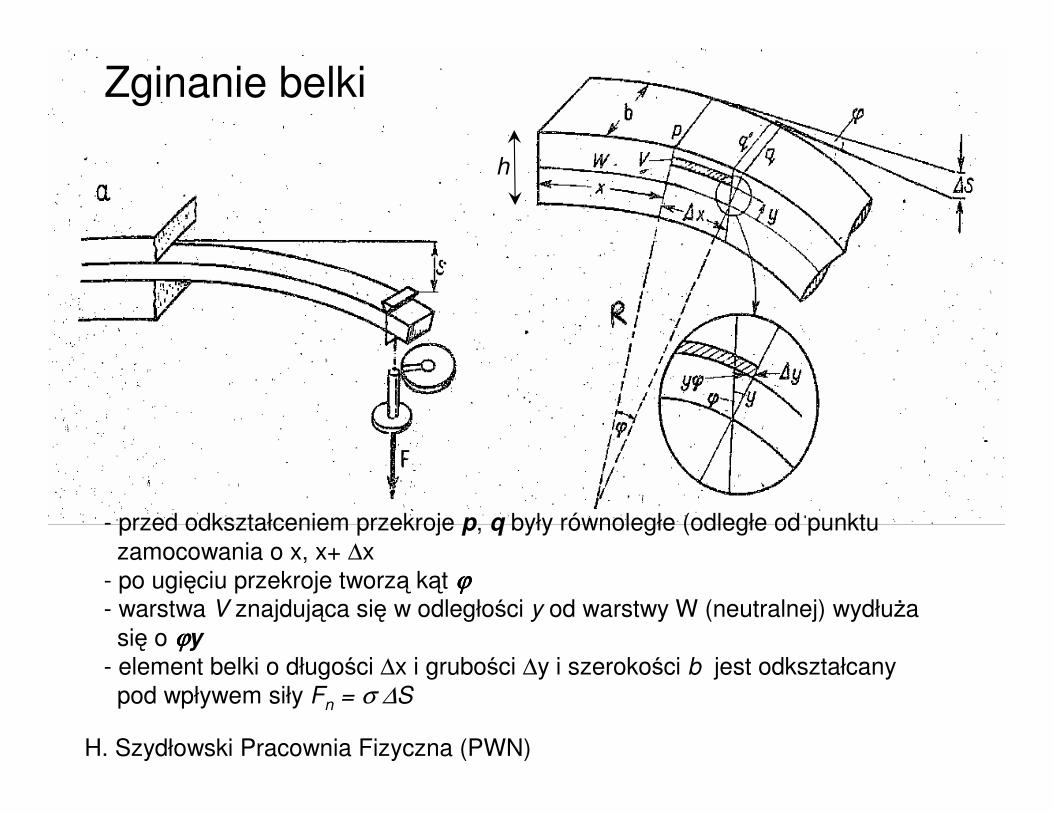
H. Szydłowski Pracownia Fizyczna (PWN)
Zginanie belki
- przed odkształceniem przekroje p, q były równoległe (odległe od punktu
zamocowania o x, x+ ∆x
- po ugięciu przekroje tworzą kąt ϕϕϕϕ- warstwa V znajdująca się w odległości y od warstwy W (neutralnej) wydłuża
się o ϕϕϕϕy
- element belki o długości ∆x i grubości ∆y i szerokości b jest odkształcany
pod wpływem siły Fn = σ ∆S
h
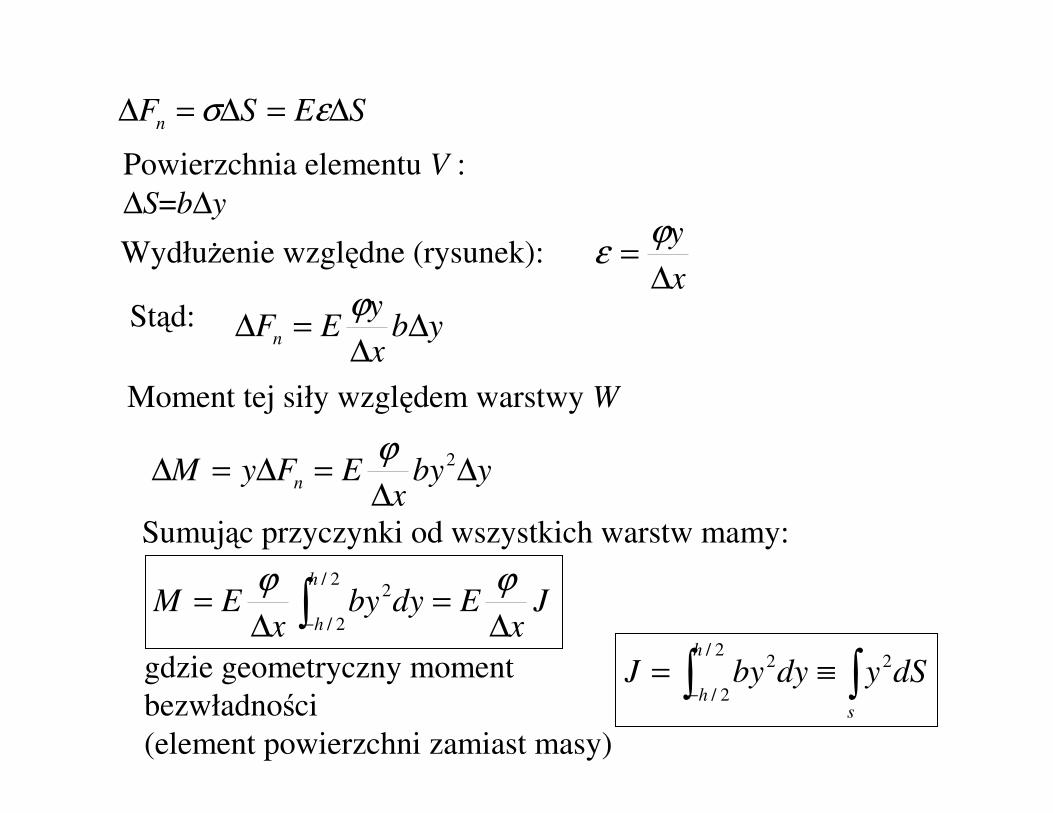
SESFn
∆=∆=∆ εσ
Powierzchnia elementu V :
∆S=b∆y
Wydłużenie względne (rysunek):x
y
∆=
ϕε
ybx
yEFn ∆
∆=∆
ϕStąd:
Moment tej siły względem warstwy W
ybyx
EFyM n ∆∆
=∆=∆ 2ϕ
Sumując przyczynki od wszystkich warstw mamy:
Jx
Edybyx
EMh
h ∆=
∆= ∫−
ϕϕ 2/
2/
2
gdzie geometryczny moment
bezwładności
(element powierzchni zamiast masy)
∫∫ ≡=−
s
h
hdSydybyJ
22/
2/
2
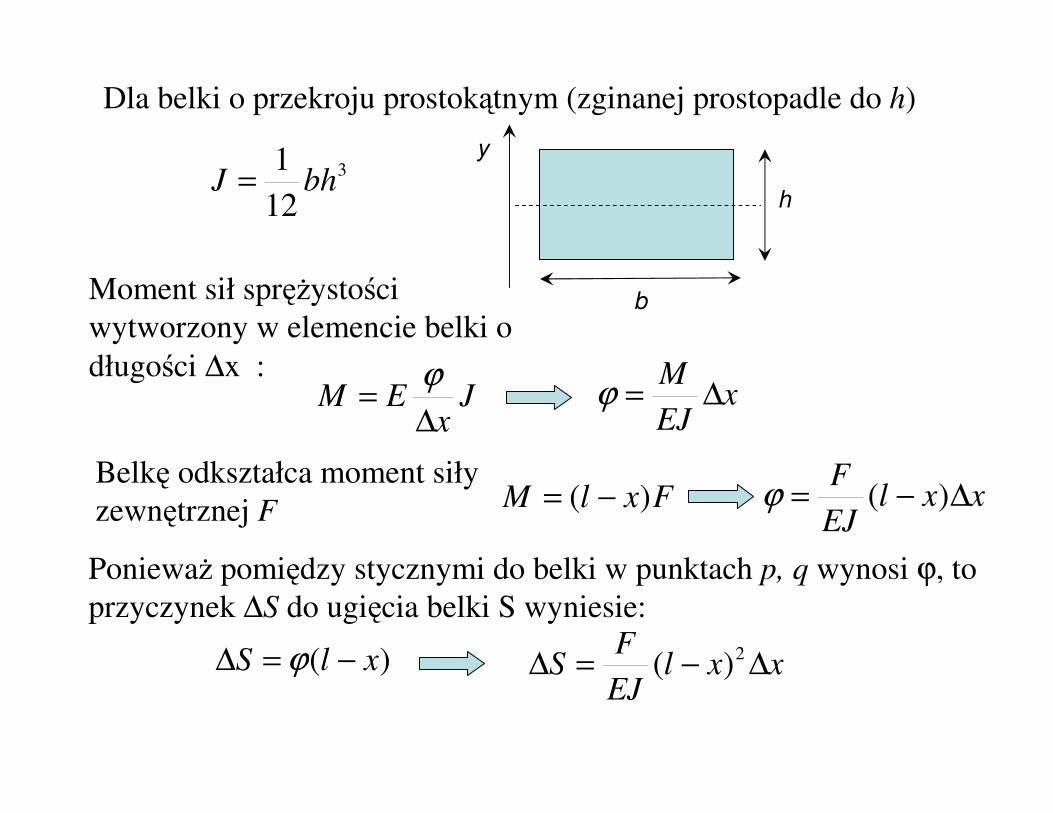
Dla belki o przekroju prostokątnym (zginanej prostopadle do h)
3
12
1bhJ =
h
b
y
Moment sił sprężystości
wytworzony w elemencie belki o
długości ∆x :J
xEM
∆=
ϕ
Belkę odkształca moment siły
zewnętrznej F FxlM )( −=
Ponieważ pomiędzy stycznymi do belki w punktach p, q wynosi ϕ, to
przyczynek ∆S do ugięcia belki S wyniesie:
)( xlS −=∆ ϕ
xEJ
M∆=ϕ
xxlEJ
F∆−= )(ϕ
xxlEJ
FS ∆−=∆ 2)(
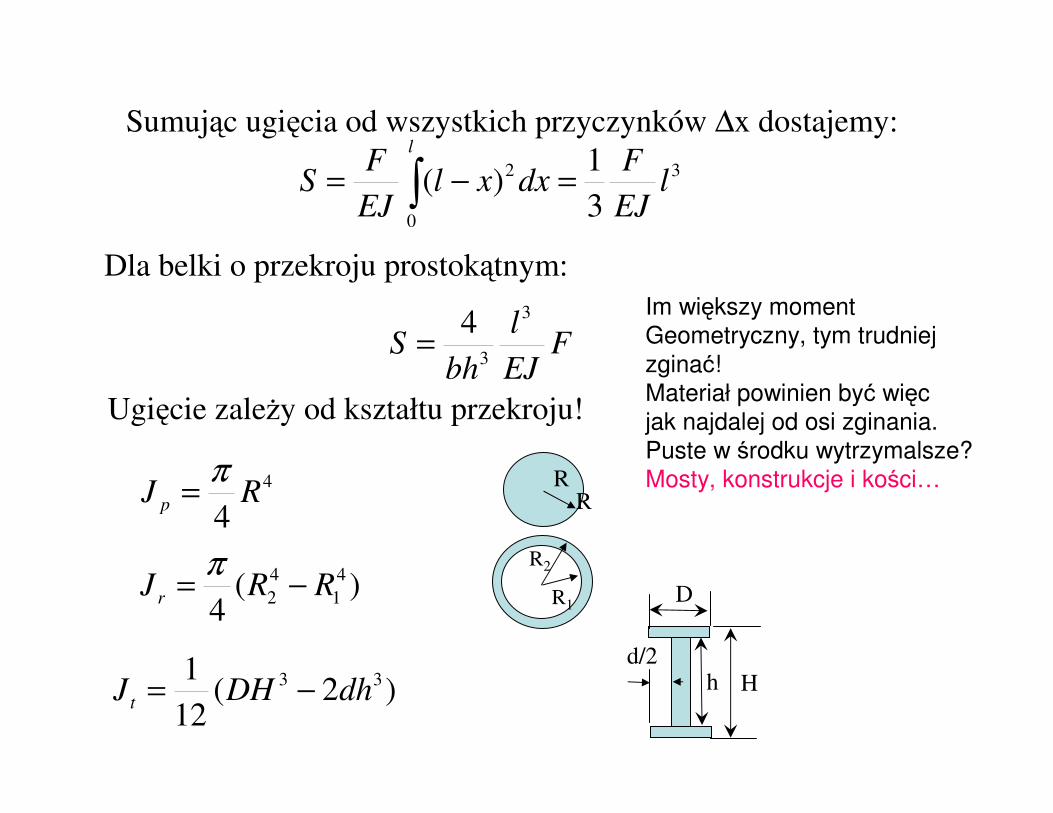
Dla belki o przekroju prostokątnym:
3
0
2
3
1)( l
EJ
Fdxxl
EJ
FS
l
=−= ∫
Sumując ugięcia od wszystkich przyczynków ∆x dostajemy:
FEJ
l
bhS
3
3
4=
4
4RJ
p
π=
Ugięcie zależy od kształtu przekroju!
)(4
4
1
4
2 RRJr
−=π
)2(12
1 33dhDHJ
t−=
d/2
D
h H
RR
R2
R1
Im większy moment
Geometryczny, tym trudniej
zginać!Materiał powinien być więc
jak najdalej od osi zginania.
Puste w środku wytrzymalsze?
Mosty, konstrukcje i kości…

Jx
EM∆
=ϕ
Moment siły jeszcze raz…
R
∆x
ϕ
Rx
1=
∆
ϕ
Promień krzywizny
)()(
xR
EJxM =
Z matematyki wiadomo, że krzywizna
z
y
2/322
2
1
11
∂
∂+
∂
∂=
x
zx
z
R2
21
x
z
R ∂
∂=
Dla małych ugięć:
Stąd można uzyskać informacje
kształcie belki…
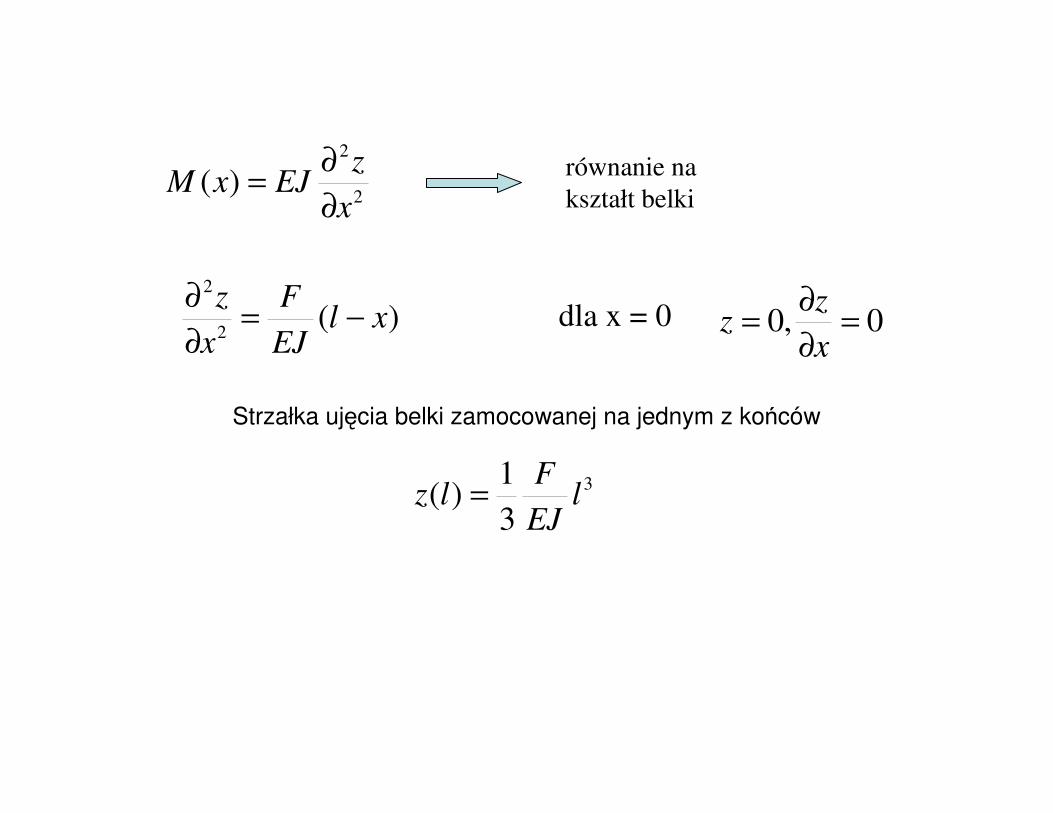
równanie na
kształt belki2
2
)(x
zEJxM
∂
∂=
)(2
2
xlEJ
F
x
z−=
∂
∂dla x = 0 0,0 =
∂
∂=
x
zz
3
3
1)( l
EJ
Flz =
Strzałka ujęcia belki zamocowanej na jednym z końców
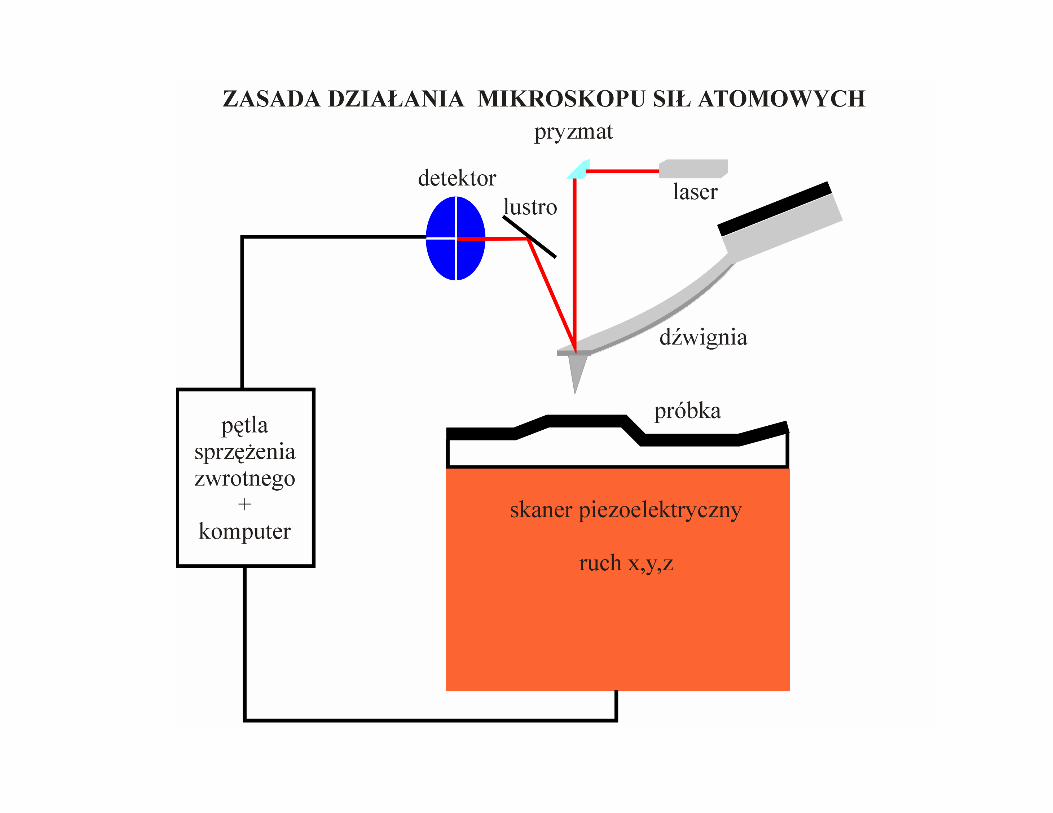
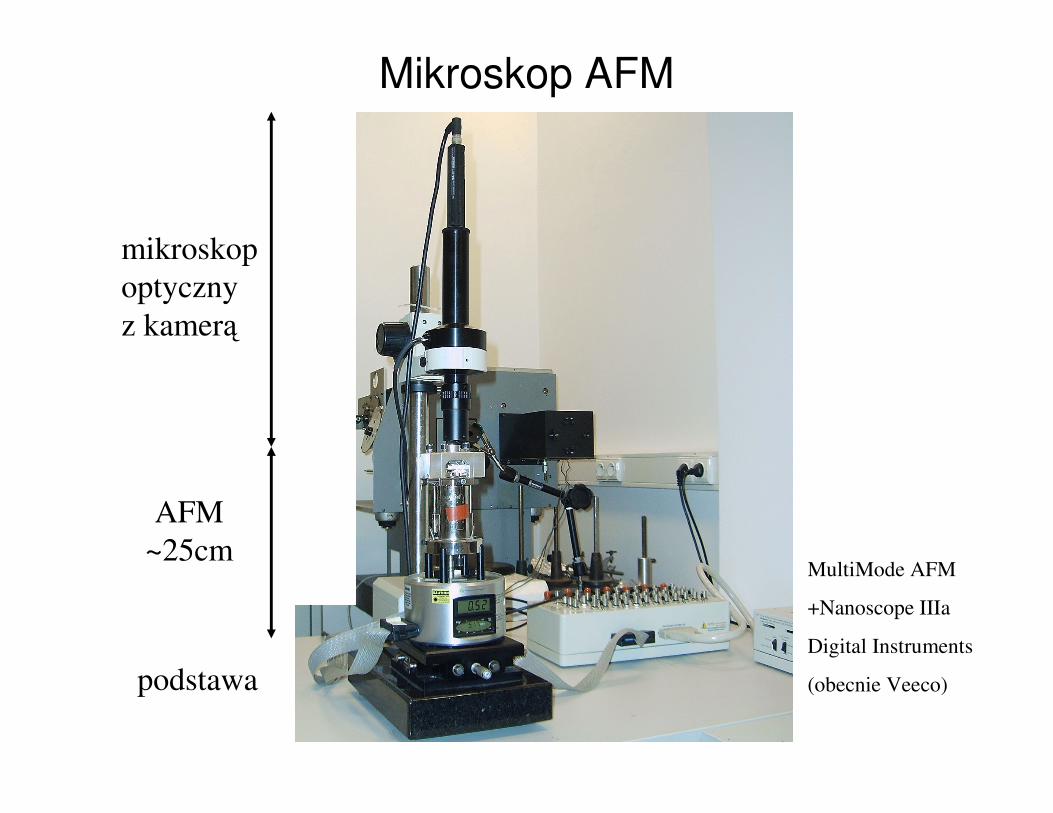
Mikroskop AFM
AFM
~25cm
podstawa
mikroskop
optyczny
z kamerą
MultiMode AFM
+Nanoscope IIIa
Digital Instruments
(obecnie Veeco)
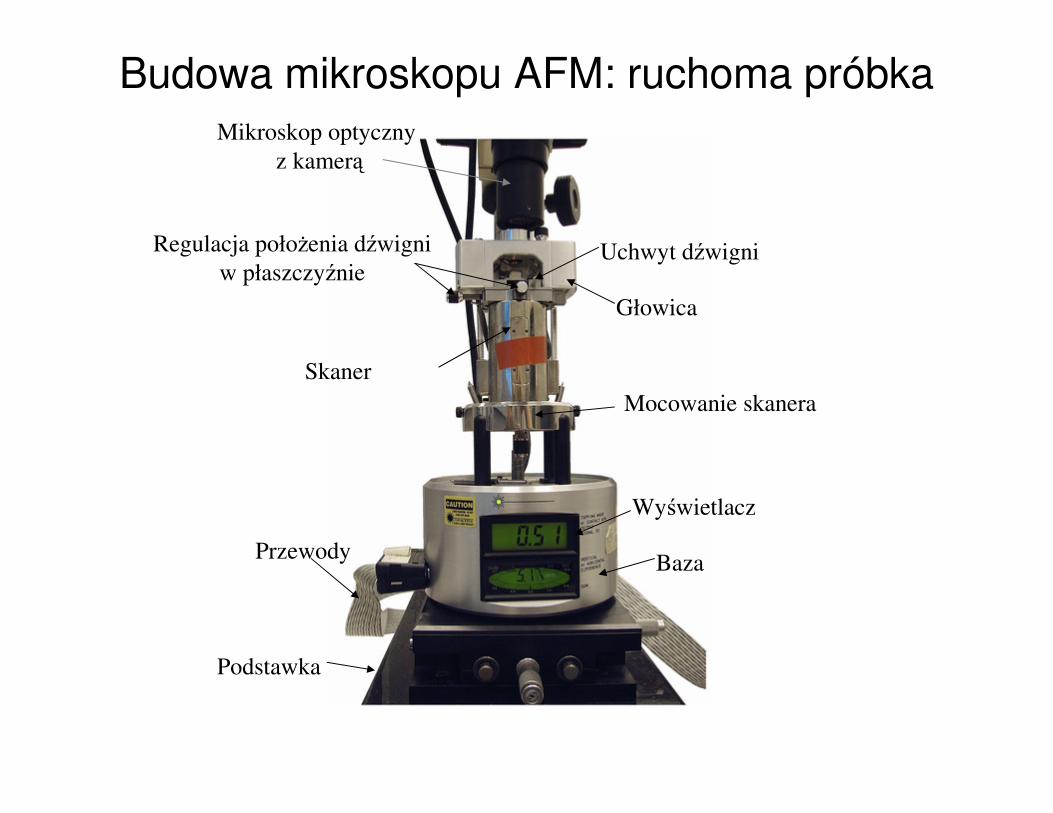
Budowa mikroskopu AFM: ruchoma próbka
Głowica
Skaner
Uchwyt dźwigni
PrzewodyBaza
Wyświetlacz
Mikroskop optyczny
z kamerą
Regulacja położenia dźwigni
w płaszczyźnie
Mocowanie skanera
Podstawka
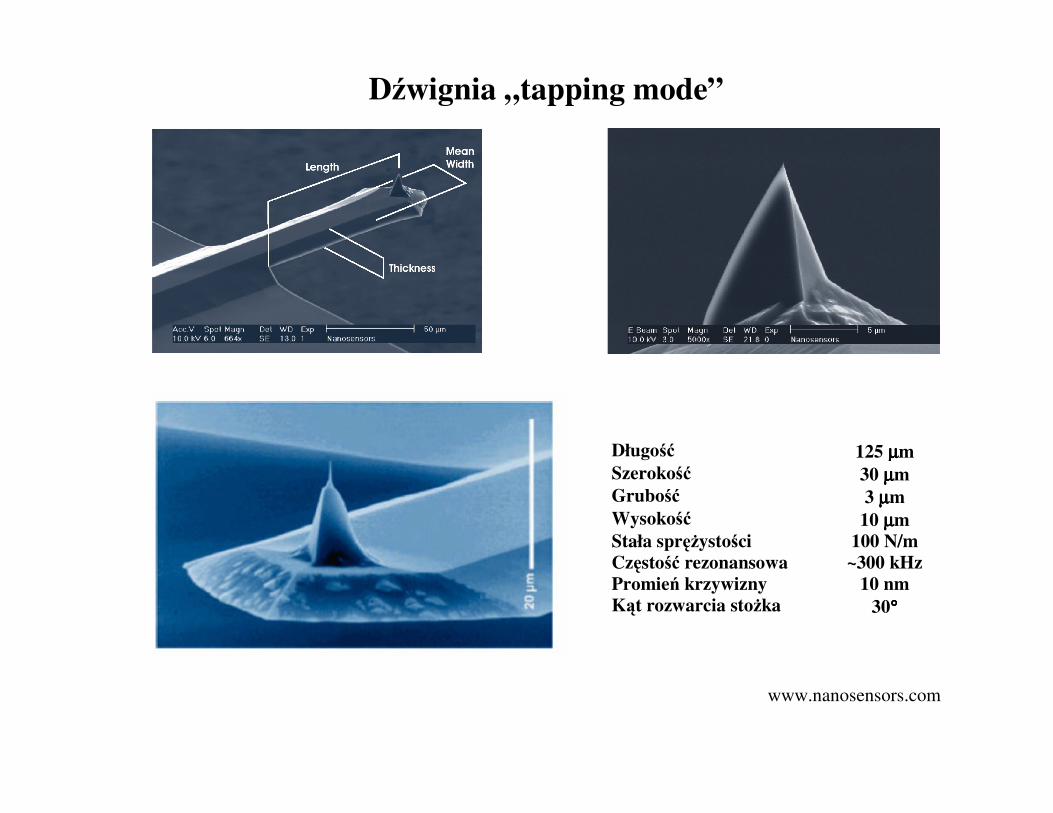
www.nanosensors.com
Dźwignia „tapping mode”
Długość 125 µµµµm
Szerokość 30 µµµµm
Grubość 3 µµµµm
Wysokość 10 µµµµm
Stała sprężystości 100 N/m
Częstość rezonansowa ~300 kHz
Promień krzywizny 10 nm
Kąt rozwarcia stożka 30°°°°
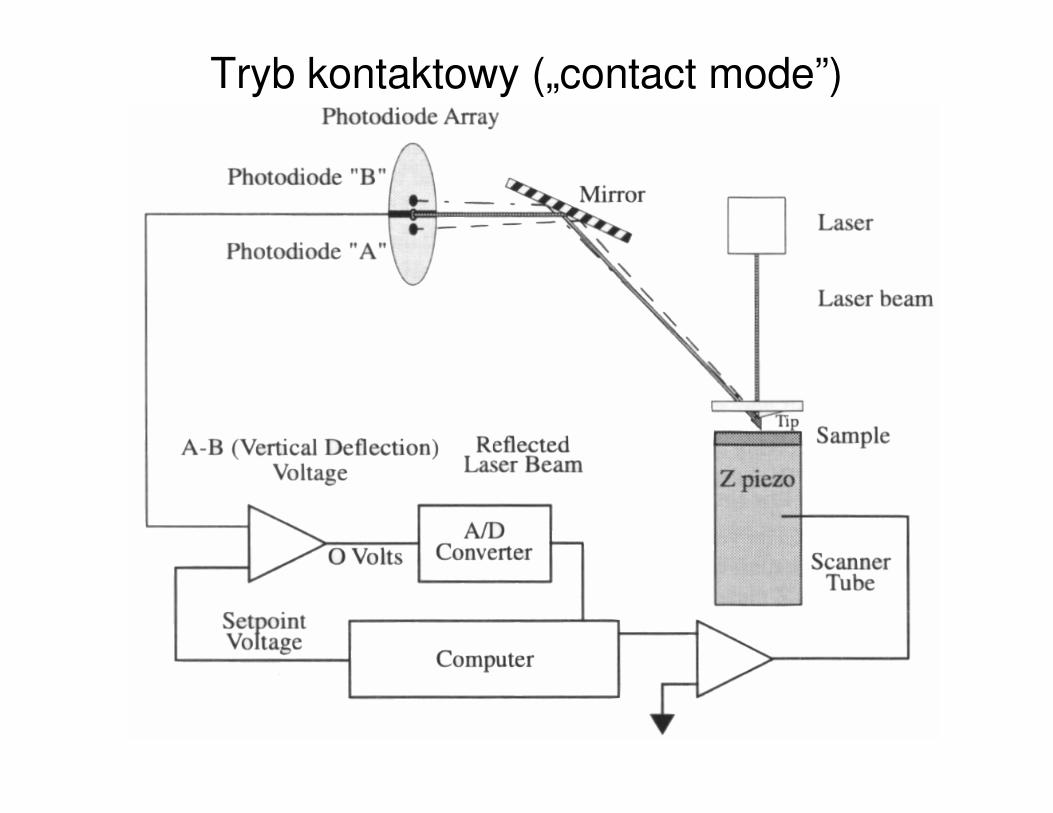
Tryb kontaktowy („contact mode”)

Tryb kontaktowy („contact mode”)
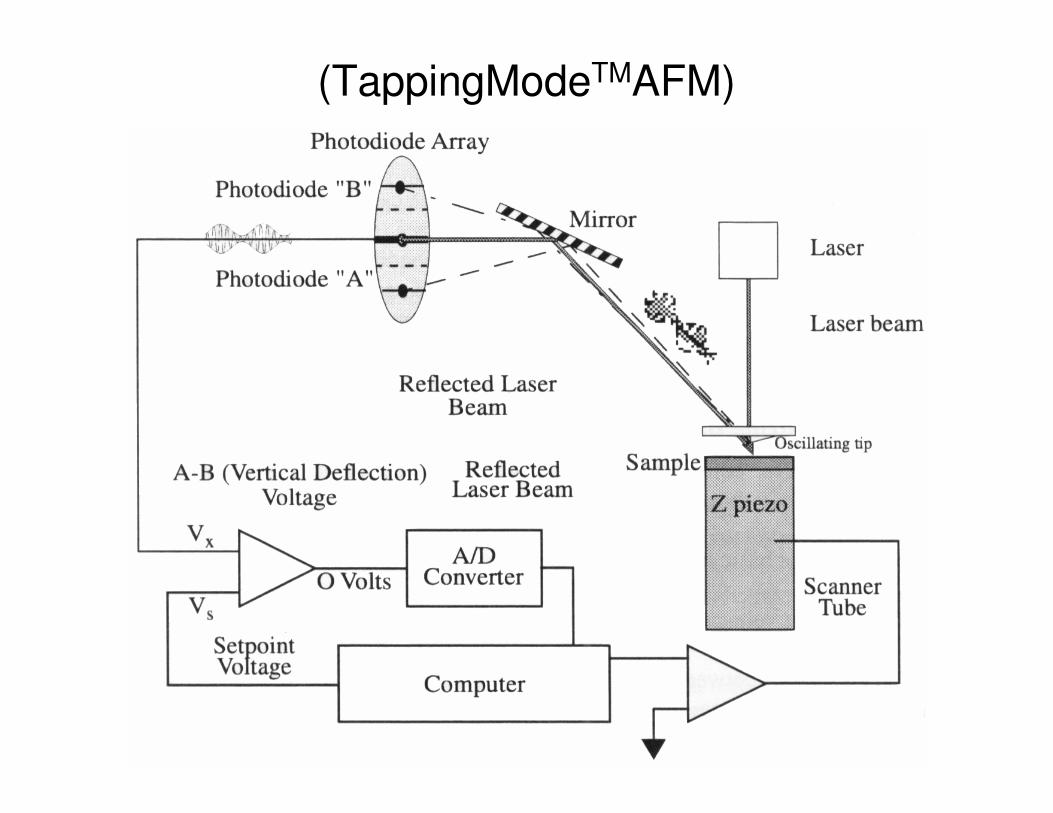
(TappingModeTMAFM)
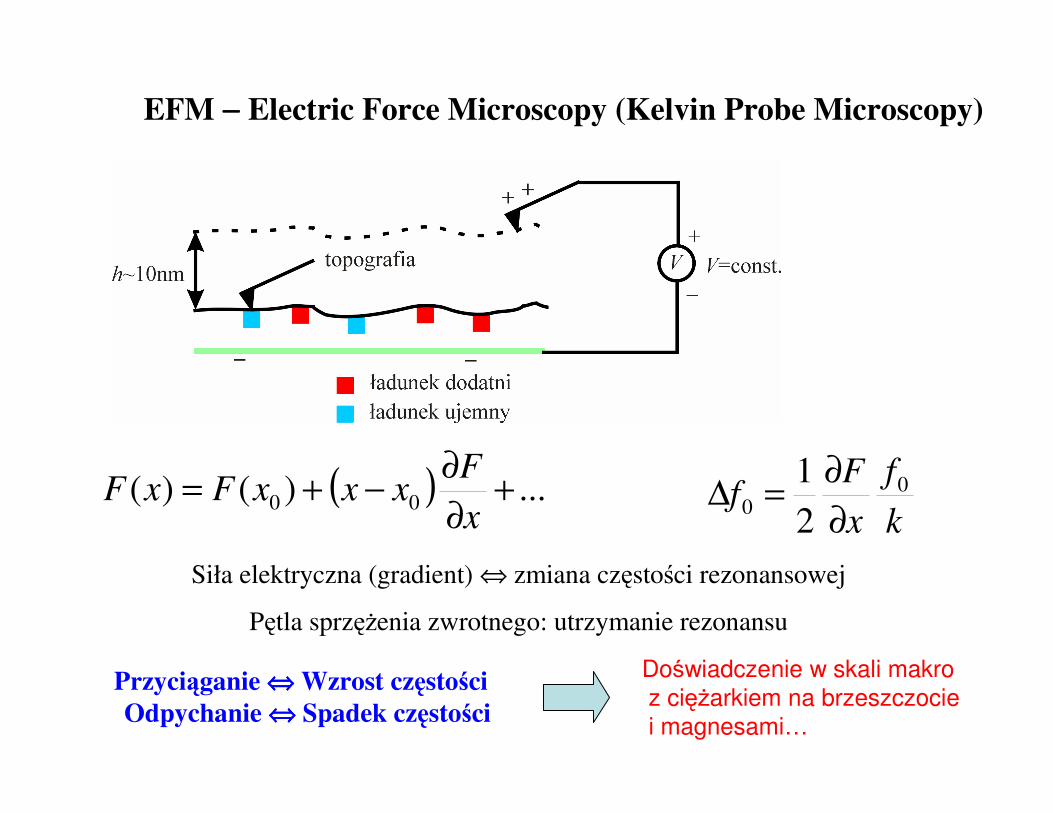
EFM −−−− Electric Force Microscopy (Kelvin Probe Microscopy)
Przyciąganie ⇔⇔⇔⇔ Wzrost częstości
Odpychanie ⇔⇔⇔⇔ Spadek częstości
Siła elektryczna (gradient) ⇔ zmiana częstości rezonansowej
Pętla sprzężenia zwrotnego: utrzymanie rezonansu
( ) ...)()( 00 +∂
∂−+=
x
FxxxFxF
k
f
x
Ff 0
02
1
∂
∂=∆
Doświadczenie w skali makro
z ciężarkiem na brzeszczocie
i magnesami…
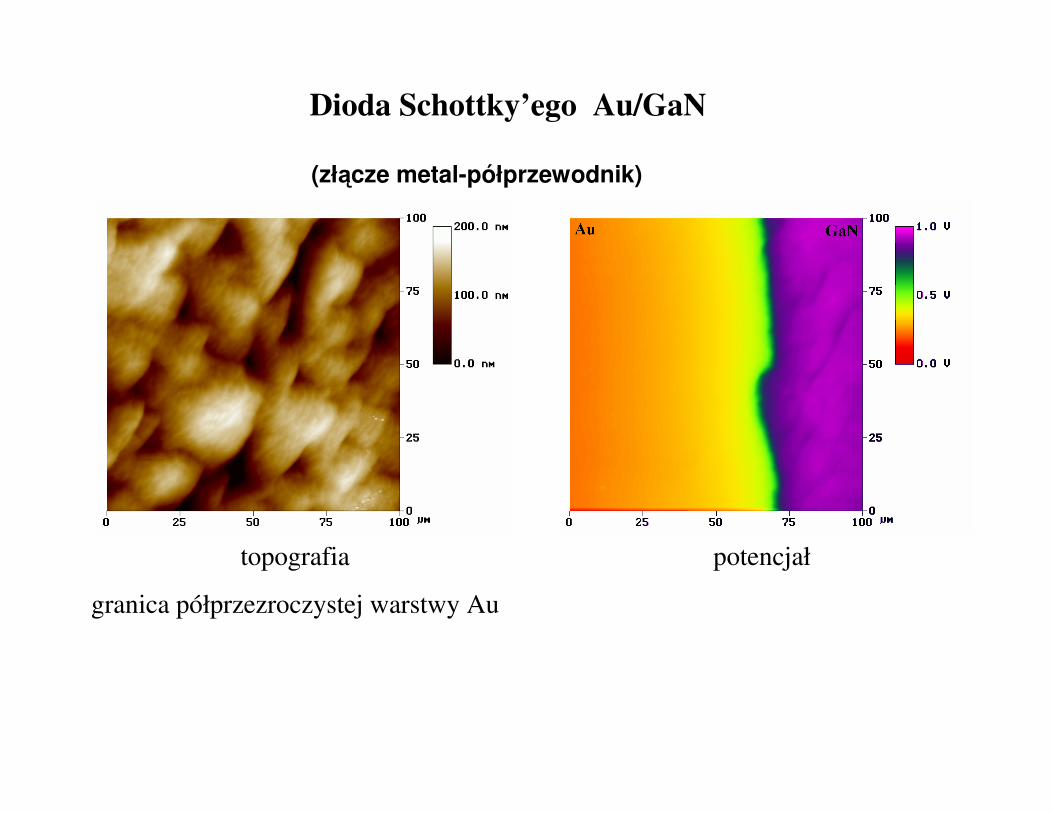
Dioda Schottky’ego Au/GaN
topografia
granica półprzezroczystej warstwy Au
potencjał
(złącze metal-półprzewodnik)

GaN 2.2µµµµm
LT Buffer
sapphire
potecjał (KPFM) topografia (AFM)
GaN

MFM −−−− Magnetic Force Microscopy
Przyciąganie ⇔ Wzrost częstości
Odpychanie ⇔ Spadek częstości
Siła magnetyczna (gradient) ⇔ zmiana częstości rezonansowej
Pętla sprzężenia zwrotnego: utrzymanie rezonansu
( ) ...)()( 00 +∂
∂−+=
x
FxxxFxF
k
f
x
Ff 0
02
1
∂
∂=∆

Mikroskop sił magnetycznych (MFM)
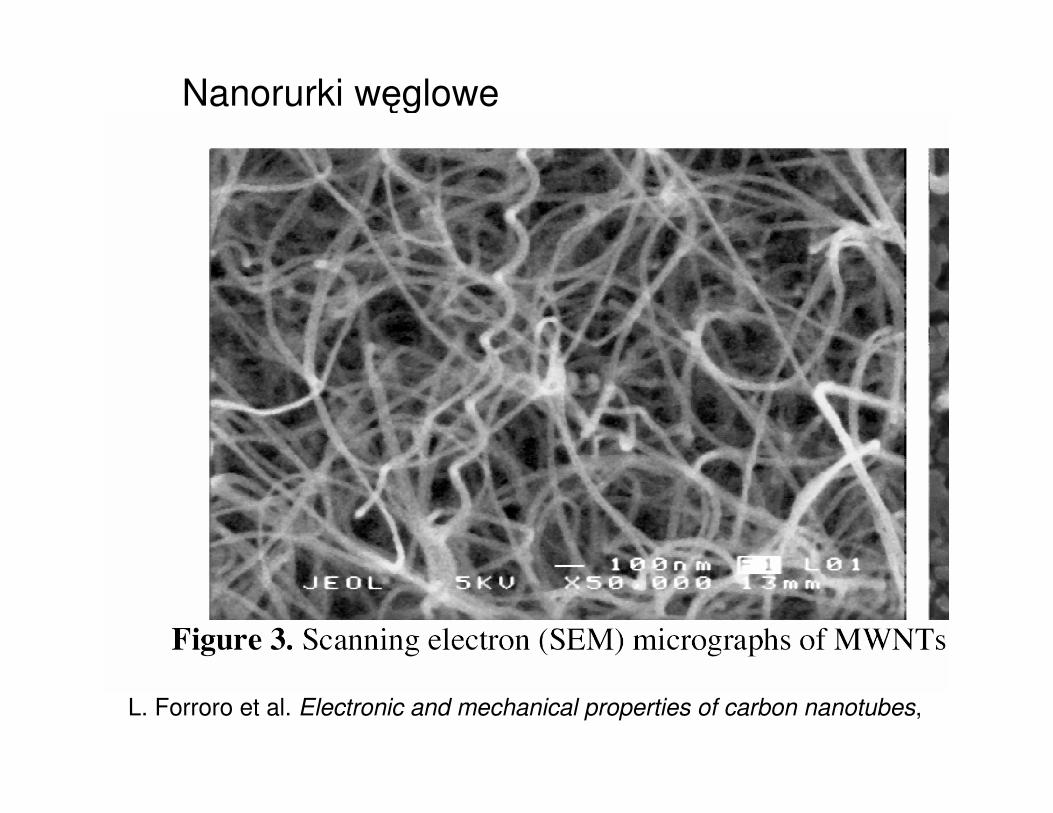
Nanorurki węglowe
L. Forroro et al. Electronic and mechanical properties of carbon nanotubes,
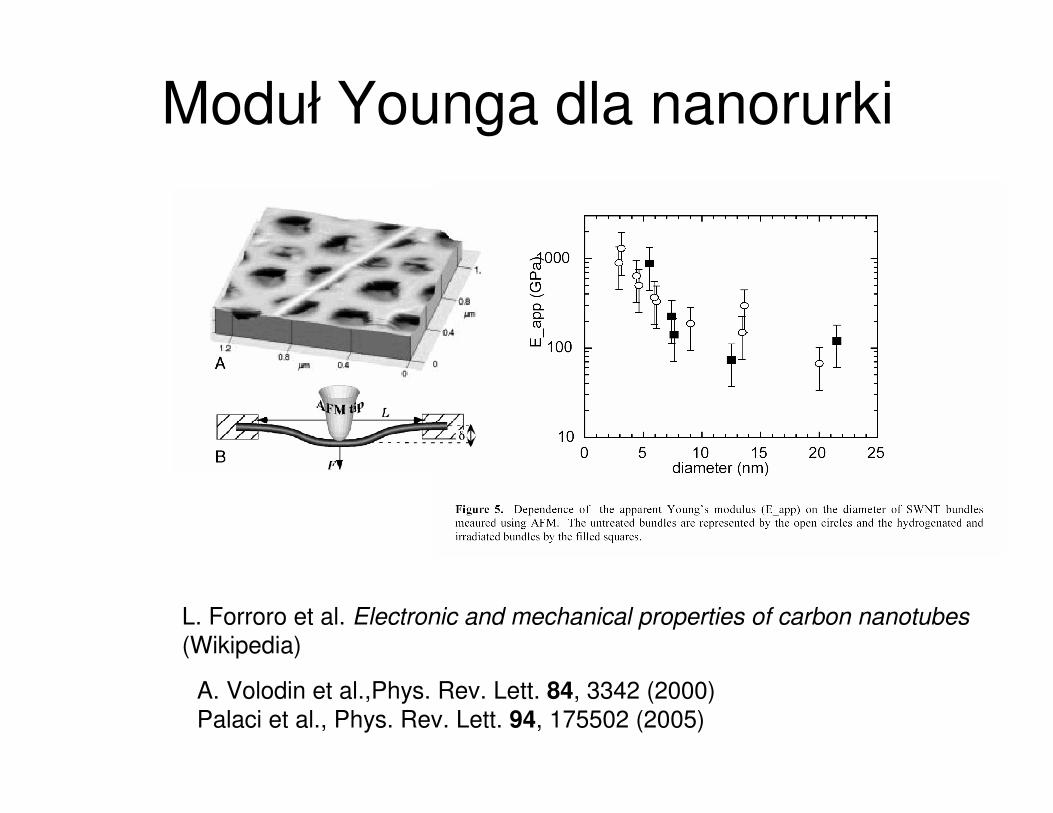
Moduł Younga dla nanorurki
L. Forroro et al. Electronic and mechanical properties of carbon nanotubes
(Wikipedia)Palaci
A. Volodin et al.,Phys. Rev. Lett. 84, 3342 (2000)
Palaci et al., Phys. Rev. Lett. 94, 175502 (2005)

www.veeco-europe.com