RUCHFALOWY - old.if.pwr.wroc.plwsalejda/fale.pdf · Przykłady ruchu falowego i zjawisk mających...
53
Instytut Fizyki RUCH FALOWY Włodzimierz Salejda Notatki do wykładów z fizyki dla studentów Wydziału Inżynierii Środowiska PWr Rok ak. 2006/2007, semestr letni Notatki są opublikowane w Internecie na stronie domowej autora http://www.if.pwr.wroc.pl/˜wsalejda, z której można pobrać skompresowane pliki fale − ps.zip lub fale − pdf.zip z notatkami zapisanymi w formatach PS lub PDF. Pliki rozpakować należy za pomocą programów: pkunzip, InfoZip, WinZip itp. Bezpłatne przeglądarki do plików postscriptowych (o rozszerzeniu .ps ) oraz zapisanych w formacie Portable Document File (o rozszerzeniu .pdf ) są dostępne w Internecie na stro- nie z notatkami. Wrocław, wrzesień 2007
Transcript of RUCHFALOWY - old.if.pwr.wroc.plwsalejda/fale.pdf · Przykłady ruchu falowego i zjawisk mających...
Instytut Fizyki
RUCH FALOWYWłodzimierz Salejda
Notatki do wykładów z fizyki dla studentówWydziału Inżynierii Środowiska PWr
Rok ak. 2006/2007, semestr letni
Notatki są opublikowane w Internecie na stronie domowej autorahttp://www.if.pwr.wroc.pl/˜wsalejda,
z której można pobrać skompresowane pliki fale−ps.zip lub fale−pdf.zip z notatkami zapisanymiw formatach PS lub PDF.Pliki rozpakować należy za pomocą programów: pkunzip, InfoZip, WinZip itp.Bezpłatne przeglądarki do plików postscriptowych (o rozszerzeniu .ps) oraz zapisanych
w formacie Portable Document File (o rozszerzeniu .pdf ) są dostępne w Internecie na stro-nie z notatkami.
Wrocław, wrzesień 2007
Spis treści
1. Wprowadzenie 3
2. Fale sprężyste 52.1. Prędkości stowarzyszone z ruchem falowym . . . . . . . . . . . . . . . . . . . . . 8
3. Równanie fali monochromatycznej 93.1. Prędkość fazowa fali monochromatycznej . . . . . . . . . . . . . . . . . . . . . . 103.2. Równanie fali płaskiej rozchodzącej się w dowolnym kierunku . . . . . . . . . . . 12
4. Równanie falowe 134.1. Proste wyprowadzenie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.2. Liniowe równanie falowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.3. Prędkość impulsu poprzecznego w strunie . . . . . . . . . . . . . . . . . . . . . . 164.4. Jednowymiarowa fala podłużna w pręcie . . . . . . . . . . . . . . . . . . . . . . 174.5. Dodatek I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5. Energia fali sprężystej 215.1. Dodatek II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.2. Przechodzenie fal sprężystych przez granicę ośrodków . . . . . . . . . . . . . . . 25
6. Fale akustyczne 296.1. Wzór Laplace’a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306.2. Zależności fazowe w fali głosowej . . . . . . . . . . . . . . . . . . . . . . . . . . 316.3. Średnia wartość kwadratu ciśnienia akustycznego . . . . . . . . . . . . . . . . . 356.4. Przenoszenie pędu przez fale akustyczne . . . . . . . . . . . . . . . . . . . . . . 376.5. Akustyczny efekt Dopplera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7. Interferencja fal 397.1. Interferencja fal monochromatycznych . . . . . . . . . . . . . . . . . . . . . . . . 397.2. Fale stojące na strunie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407.3. Źródła dźwięków . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427.4. Dudnienia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437.5. Rezonans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8. Prędkość grupowa i modulacja fal 448.1. Modulacja amplitudowa fal radiowych . . . . . . . . . . . . . . . . . . . . . . . . 468.2. O przekazie obrazu telewizyjnego . . . . . . . . . . . . . . . . . . . . . . . . . . 478.3. Prędkość grupowa a prędkość fazowa – dyspersja fal . . . . . . . . . . . . . . . . 48
9. Fale nieliniowe 499.1. Fale uderzeniowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499.2. Solitony . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2
Rzeczywistość to nie cecha, którą można wykryć papierkiemlakmusowym.
Stephen W. Hawking1
1. Wprowadzenie
Wszechświat, w tym także ta jego część, w którym istnieje cywilizacja ziemska, wypeł-niają różnego typu fale. Przestrzeń kosmiczną wypełnia między innymi promieniowanie relik-towe, będące swego rodzaju echem okrzyku nowonarodzonego Wszechświata, który wydał tenżew momencie, gdy był jeszcze bardzo bardzo młodym bo miał zaledwie 105 lat2.Atmosferę ziemską wypełnia promieniowanie elektromagnetyczne (tj. fale elektromagne-
tyczne o różnych długościach) emitowane przez Słońce, anteny radiowe, telewizyjne i nadaj-niki satelitarne umieszczone na orbitach okołoziemskich. Ogólnoświatowa sieć komputerowaInternet, zapis dźwięku i obrazów na dyskach kompaktowych, urządzenia audiowizualne orazmultimedialne, telekomunikacja (naziemna i satelitarna) – wszystko to funkcjonuje dzięki okre-ślonym procesom falowym.Skorupę ziemską od czasu do czasu nawiedzają trzesienia. Powierzchnię mórz i oceanów
pokrywają fale morskie wzbudzane wiatrem3. Przedmiot, który wrzucono do spokojnego jezioralub stawu (albo rozlewiska w dorzeczu Odry podczas powodzi tysiąclecia z lipcu 1997 roku) jestżródłem fal rozchodzących się koliście po powierzchni wody.Specyficzny typ zjawiska falowego, które pozwalam sobie nazwać fan–falą można obserwować
na stadionach. Publiczność tam zgromadzona4 wzbudza fan–falę wstając z krzeseł i siadającna nie w odpowiednich chwilach czasu5. W tym przypadku mamy do czynienia z impulsemfalowym biegnącym w ośrodku, którym jest publiczność.Sala wykładowa, w której się obecnie znajdujemy jest wypełniona falami akustycznymi,
których źrodłem jest, m.in. wykładowca. Każdy z obecnych tutaj słuchaczy staje się takżeźródłem fali akustycznej, jeśli zadaje pytanie lub rozpoczyna pogawędkę z sąsiadką lub sąsia-dem. Powiem więcej, jeśli nawet żadna z obecnych na tej sali osób chwilowo nie rozmawia, toi tak jest ona źródłem promieniowania cieplnego, ponieważ każde ciało o temperaturze bez-względnej większej od zera absolutnego emituje promieniowanie cieplne (tj. promieniowanieelektromagnetyczne).Innym rodzajem ruchu falowego jest fala materii6, która towarzyszy zgodnie z hipotezę de
Broglie’a (dualizm falowo-korposkularny) każdemu ciału o pędzie p 6= 0, a jej długość λmateriiwynosi7 λmaterii = h/p, gdzie h = 6,62 · 10−34 J·s jest stałą Plancka.Stephen Hawking8 w swej wersji kosmologii kwantowej, dotyczącej Wielkiego Wybuch, po-
sługuje się funkcją falową Wszechświata9.
1Cytat pochodzi z książki: S.W. Hawking, R. Penrose, Natura czasu i przestrzeni, Wydawnictwo Zysk i S-ka,Poznań 1996.2Wiek Wszechświata jest szacowany na od 1010 do 2.0 ·1010 lat. Dzisiaj, wrzesień 2007, czas trwania Wszech-
świata szacowany jest na około 13,7 mld lat.3Fale morskie wzbudzane przez trzęsienia ziemskie noszą nazwę tsunami.4Widzowie, to w zdecydowanej większości fani danej dziedziny sportu. Stąd też wywodzi się stosowana przeze
mnie nazwa fan–fali.5Jak oszacować prędkość fan–fali?6Nazywana jest także falą prawdopodobieństwa.7Na szczęście Matka Natura nie wyposażyła człowieka w narządy, za pomocą których widzialne byłoby
promieniowanie cieplne lub też fala materii stowarzyszona z człowiekiem lub innymi obiektami. Nie jest toniezbędne do podtrzymywania podstawowych funkcji organizmów żywych.8Patrz rozdział 5 książki cytowanej w pierwszej stopce.9W tym sensie, być może sami jesteśmy pewną formą ruchu falowego?
3
Przykłady ruchu falowego i zjawisk mających charakter falowy można by tutaj mnożyći wyliczać dalej10. My zajmiemy się podstawowymi właściwościami ruchu falowego (fali), którez punktu widzenia nauk inżynierskich i fizyki są najistotniejsze.Fala to pojęcie abstrakcyjne. Pod pojęciem fali będziemy rozumieli dalej rozchodzenie się za-
burzenia ośrodka (lub pola) od jednego do innego punktu ośrodka (pola). Precyzyjne określeniefali podamy w dalszym ciągu wykładu. Rozchodzeniu się zaburzenia towarzyszy przekazywanieruchu11 w jaki wprawiane są cząsteczki ośrodka, do których fala dociera. W tym kontekscie,znane typy ruchów falowych przyjęto dzielić na dwie duże grupy, którymi są:
I. Fale sprężyste (patrz rozdział 2) zwane także falami mechanicznymi – fale te będąprzedmiotem naszego szczególnego zainteresowania;
II. Fale elektromagnetyczne – tym falom poświęcimy nieco uwagi po zapoznaniu sięz równaniami Maxwella.Fale sprężyste swoją nazwę zawdzięczają temu, że rozchodzą się, tj. istnieją tylko w ośrod-
kach sprężstych, natomiast fale elektromagnetyczne mogą się rozchodzić także w próżni. Pro-pagacja fal elektromagnetycznych (grawitacyjnych) jest związana z rozchodzeniem się zaburzeńpola elektromagnetycznego (grawitacyjnego). W tym sensie do rozchodzenia się fal elektroma-gnetycznych (grawitacyjnych) nie jest wymagane istnienie ośrodka sprężystego12.Dobrym przykładem ruchu falowego z pierwszej grupy jest dźwięk (fale akustyczne). Na-
tomiast do drugiej grupy zaliczamy, m.in., światło, fale radiowe i telewizyjne, promieniowanieX.Dodajmy, że fale rozchodzą się ze skończoną prędkością i że towarzyszy im przekaz energii
oraz pędu (patrz rozdział 5).Ruch falowy jest działem fizyki, w którym manifestuje się wyraźnie jedność i uniwersalność
praw przyrody, ponieważ do opisu fal będziemy:stosowali dynamikę Newtona (patrz rozdział 4),
odwoływali się do własności sprężystych ciał (patrz rozważania dotyczące rozchodzeniasię fal sprężystych w rozdziale 4),
posługiwali się termodynamiką (patrz rozdziały 6 dotyczące wzoru Laplace’a i fal uderze-niowych (patrz rozdział 9.2)).Będziemy mówili głównie o falach liniowych, które spełniają zasadę superpozycji (patrz
podrozdział Interferencja fal) . Omówimy także krótko fale nieliniowe, których dobrym repre-zentantem są solitony (patrz rozdział 9.2).
10Nie jest ruchem falowym tzw. fala w wojsku.11Zazwyczaj jest to ruch harmoniczny tłumiony.12Zagadnienie to ma swoją długą historię związaną z postulatem istnienia hipotetycznego eteru, tj. wyima-ginowanego ośrodka, w którym rozchodzą się fale elektromagnetyczne. Tego typu problemy były rozpatrywanei szeroko dyskutowane na przełomie XIX i XX wieku. Sformułowanie przez Einsteina szczególnej teorii względ-ności położyło kres tego typu spekulacjom. Jednakże pojęcia próżni nie należy utożsamiać z absolutnie pustąprzestrzenią będącą tutaj synonimem absolutnie niczego, ponieważ próżnia z punktu widzenia fizyki kwantowejma swoją wewnętrzną strukturę (jest to przecież fragment czterowymiarowej czasoprzestrzeni), którą przyjdzienam jeszcze dokładnie poznać. Zamiast próżni, mówimy w tym przypadku o polu jako o ośrodku, w którympropagują się fale.
4
W miarę jak odkrywamy kolejne fundamentalne zasady fizyki,okazuje się, że mają one coraz mniej wspólnego z naszym ży-
ciem.Steven Weinberg13
2. Fale sprężyste
Wszystkie rodzaje fal sprężystych rozchodzą się (mówimy, że propagują się) w ośrodku wy-kazującym sprężystość objętości lub sprężystość postaci (kształtu). Wymienione tutaj rodzajesprężystości wykazują gazy, ciecze i ciała stałe14. Płyny wykazują jedynie sprężystość objętościnatomiast ciała stałe sprężystość objętości i sprężystość postaci15.Zadanie 1. Wyjaśnić własności sprężystości płynów i ciał stałych.Z właściwością tą mamy do czynienia wówczas, gdy próbujemy zmienić objętość płynu
lub ciała stałego albo też kształt ciała stałego. Czynimy to zazwyczaj w określony sposób, tj.ściskamy płyn lub ciało stałe lub odkształcamy ciało stałe (rozciągając, ściskając, skręcając lubzginając je). Wtedy to zaczynają odgrywać rolę przyciągające lub odpychające oddziaływaniamiędzy cząsteczkami ośrodka, które przeciwdziałają jego odkształceniu. Po ustaniu działaniazewnętrznej siły powodującej odkształcenie, ośrodek powraca do początkowej objętości lubkształtu. Właściwość tę przyjęto nazywać sprężystością ośrodka16.Istnieją odpowiednie charakterystyki ilościowe opisujące sprężystość, które krótko przedsta-
wiamy poniżej.Jeśli miara σ zewnętrznego oddziaływania na dany układ fizyczny jest dostatecznie mała,
to wartość odkształcenia ε ośrodka sprężystego jest proporcjonlna do σ, tj.
ε = κ · σ, (1)
gdzie κ — współczynnik sprężystości ośrodka — jest miarą właściwości sprężystych danegoośrodka. Miarą oddziaływania zewnętrznego σ jest zazwyczaj naprężenie (zwane, w przypadkupłynów, ciśnieniem), zaś miarą odkształcenia ośrodka sprężystego ε jest względna deformacja(wielkość bezwymiarowa).Ośrodek sprężysty spełniający (1) będziemy określali mianem liniowego.Zadanie 2. Jaki jest wymiar współczynnika κ?Ostatnią zależność stosuje się zazwyczaj w następującej postaci:
σ =1κ· ε = K · ε, (2)
gdzie K jest modułem sprężystości17, który będąc odwrotnością współczynnika sprężystości jesttakże miarą właściwości sprężystych ośrodka.Zadanie 3. Jaki jest wymiar współczynnika K?Zastanówmy się, jak powiązać sprężystość ciał z falami sprężystymi. W tym celu odwołajmy
się do doświadczeń myślowych.
13Cytat pochodzi z książki: Steven Weinberg, Sen o teorii ostatecznej, Wydawnictwo Alkazar Sp z.o.o.,Warszawa 1994.14Przypomnijmy, że gazy i ciecze przyjęto, w naukach inżynierskich, nazywać płynami. Natomiast w fizyceciecze i ciała stałego (takie jak: ciała amorficzne (szkła, stopy, polikryształy), kryształy (np. kryształek solikuchennej lub kwarcu, ciekłe kryształy) przyjęto określać mianem materii skondensowanej.15Termin sprężystość oznacza tutaj właściwość fizyczną polegającą na dążeniu danego ośrodka do zachowaniaswej początkowej objętości lub postaci (kształtu) po ustaniu działania powodującego odkształcenie.16Zauważmy, że można w tym kontekscie mówić o pewnego rodzaju pamięci dotyczącej kształtu lub objętościrozpatrywanego ośrodka.17Dobrym tego przykładem jest prawo Hooke’a:
∆ll0=σ
E=F
E · S , gdzie E – moduł Younga, F – wartośćzewnętrznej siły przyłożonej do pręta o długości początkowej l0 i polu przekroju poprzecznego S, ∆l – wydłużeniepręta pod działaniem F .
5
1. Wyobraźmy sobie metalowy pręt o długości L, masie M i polu przekroju poprzecznego S0,którego prawy koniec jest zamocowany natomiast lewy nie. Abstrahując od efektów związanychz polem grawitacyjnym (tj. zaniedbujemy strzałkę ugięcia swobodnego końca), stan równo-wagi pręta odpowiada idealnie poziomemu położeniu zamocowanego jednostronnie pręta. Po-dzielmy nasz pręt na N identycznych części (fragmentów) każda o długości ∆x = L/N i ma-sie ∆m = M/N . Jeśli początek osi OX umieścimy w nieruchomionym lewym końcu pręta,to położenie Xn środka masy n–tego fragmentu określa związek Xn = (n − 1/2) · ∆x, gdzien = 1, 2, 3, . . . , N (dlaczego?). Jeśli stan równowagi zaburzymy przez energiczne uderzenie me-talowym młotkiem w niezamocowany koniec pręta w kierunku równoległym do jego osi, to spo-wodujemy lokalne odkształcenie objętości pierwszego fragmentu pręta (o masie ∆m i objętości∆V = ∆x · S0), którego środek jest położony w odległości X1 = ∆x/2 od lewego końca pręta.Po uderzeniu odkształcony fragment pręta powraca do stanu równowagi, ponieważ działają,wspomniane wcześniej, siły oddziaływań międzycząsteczkowych odpowiedzialne za własnościsprężyste materiału pręta. Rozszerzający się pierwszy fragment pręta ściska sąsiadujący z nimpo prawej stronie identyczny fragment położony w odległościX2 = 3·∆x/2 od jego lewego końca.Ten z kolei, będąc ośrodkiem sprężystym, rozszerzając się odkształca następny fragment prętapołożony w odległości X3 = 5 ·∆x/2 od jego lewego końca. W ten sposób zostaje odkształconytrzeci fragment pręta, który rozszerzając się odkształca czwarty itd. W efekcie otrzymujemy roz-chodzenie się odkształcenia (zaburzenia) stanu równowagi wzdłuż pręta, które nazywamy faląsprężystą. Dodajmy jeszcze, że z propagacją odkształcenia wzdłuż pręta związany jest przekazenergii mechanicznej oraz pędu pomiędzy różnymi punktami pręta. W czasie uderzenia młot-kiem lewego końca pręta zostaje mu przekazana określona ilość energii mechanicznej, na którąskłada się energia kinetyczna (w ruch drgający wprawiona została masa zawarta w pierwszymfragmencie pręta) oraz energia potencjalna (objętość pierwszego fragmentu została odkształ-cona). Ta porcja (kwant) energii mechanicznej propaguje się wzdłuż pręta w miarę tego jak(w opisany wyżej sposób) są odkształcane jego kolejne fragmenty.
2. Wyobraźmy sobie nieskończenie długi poziomy sznur, którego prawy koniec jest zamocowanyna stałe, zaś lewy początkowo spoczywa nieruchomo. Stan ten jest stanem równowagi sznurka.Jeśli teraz jego swobodny koniec zostanie wprawienie w ruch harmoniczny prosty, to lokalnezaburzenie położenia fragmentów sznurka znajdujących się w pobliżu jego lewego końca zaczniesię propagować wzdłuż sznurka (ośrodka) w postaci ciągu garbów i dolin. To co zaobserwujemyjest jednowymiarową falą sprężystą biegnącej wzdłuż sznurka, której żródło znajduje się najednym z jego końców. Podobnie jak poprzednio warto zauważyć, że z propagacją lokalnegozaburzenia związany jest przekaz energii mechanicznej (i pędu) pomiędzy różnymi fragmentamisznurka.
3. Weźmy pod uwagę tekturowy poziomy cylinder o długości L, wypełniony powietrzem i otwartyna obu końcach. W stanie równowagi ciśnienie powietrza w każdym punkcie wewnątrz cylin-dra jest takie samo. W celu przeanalizowania ruchu falowego w rozpatrywanym przypadkupodzielmy objętość cylindra na N identycznych fragmentów o długości ∆x = L/N . Jeśli (takjak poprzednio) początek osi OX umieścimy w lewym końcu cylindra, to położenie Xn środkan–tego fragmentu określa związek Xn = (n − 1/2) · ∆x, gdzie n = 1, 2, 3, . . . , N . Zaburzmyteraz stan równowagi powietrza w cylindrze przez przysunięcie jego lewego końca do kamertonui krótkie uderzenie w jego widełki (ten sam efekt uzyskamy przysuwając lewy koniec cylindrado ust i wydając krótki dźwięk). Źródło dźwięku spowoduje lokalną zmianę objętości pierw-szego fragmentu ∆V = ∆x · S0 objętości cylindra, którego środek jest położony w odległościX1 = ∆x/2 od lewego końca cylindra. Odkształcony fragment powietrza jest ośrodkiem spręży-stym więc rozpręża się co powoduje ściśnięcie sąsiadującego z nim po prawej stronie fragmentuobjętości położonego w odległości X2 = 3 ·∆x/2 od lewego końca cylindra. Ten z kolei rozszerza-jąc się odkształca następny fragment objętości powietrza położony w odległości X3 = 5 ·∆x/2od jego lewego cylindra. W ten sposób zostaje odkształcony trzeci fragment objętości, któryrozprężając się spręża czwarty fragment objętości itd. W efekcie otrzymujemy rozchodzenie sięodkształcenia objętości powietrza znajdującego się wewnątrz tekturowego cylindra, które nazy-wamy falą akustyczną (lub krócej dźwiękiem). Z propagacją odkształcenia objętości wzdłuż osi
6
cylindra związany jest przekaz energii mechanicznej pomiędzy różnymi punktami powietrza wy-pełniającego cylinder. W czasie wydawania dźwięku pierwszemu fragmentowi powietrza zostajeprzekazana określona ilość energii mechanicznej, na którą składa się energia kinetyczna (w ruchdrgający wprawiona została masa powietrza zawarta w pierwszym fragmencie) oraz energiapotencjalna (objętość powietrza pierwszego fragmentu została ściśnięta). Ta porcja energii me-chanicznej (i jak zobaczymy także pędu) propaguje się wzdłuż osi cylindra w miarę tego jak sąodkształcane (sprężane i rozprężane) kolejne fragmenty objętości powietrza wewnątrz cylindra.
W ten sposób rozchodzą się fale dźwiękowe w sali wykładowej. Drgania strun głosowych wykła-dowcy powodują lokalne (tj. w punktach znajdujących się w pobliżu wykładowcy) zaburzeniarównowagowego ciśnienia atmosferycznego powietrza w sali wykładowej. Dzięki sprężystości ob-jętości zaburzenia to rozchodzą się od punktów ośrodka położonych w pobliżu osoby mówiącejdo punktów coraz bardziej od niej odległych.
Na podstawie tych przykładów widzimy, że propagacja fal sprężystych wymaga:(1) Istnienia materialnego ośrodka sprężystego, którego stan równowagi podlega zaburzeniu.(2) Źródła zaburzenia będącego źródłem fali.(3) Fizycznego mechanizmu, za pomocą którego sąsiadujące ze sobą części ośrodka mogą
oddziaływać na siebie. W naszym przypadku jest to sprężystość ośrodka.Przytoczone wyżej przykłady miały na celu zilustrowanie podstawowych właściwości fal
sprężystych, które składają się na dość abstrakcyjne pojęcie fali w sensie jaki używany jestw naukach inżynierskich oraz w fizyce.Po tym obszernym wprowadzeniu podajemy definicję fali sprężystej.
—————————————————————————————————-
Definicja fali sprężystej18
Falą sprężystą nazywamy proces rozchodzenie się w ośrodku sprężystymzaburzenia stanu równowagi tego ośrodka, któremu towarzyszy przekazy-wanie energii pomiędzy różnymi punktami ośrodka.
—————————————————————————————————-
Stan równowagi ośrodka, o którym mowa w powyższej definicji, oznacza tutaj taki stanośrodka sprężystego, w którym nie obserwuje się żadnych przepływów jakiejkolwiek wielkościfizycznej (np. masy, ładunku, energii, pędu) pomiędzy dwoma różnymi punktami tego ośrodka19 .Fale sprężyste dzieli się na fale podłużne i poprzeczne. Podstawą tej klasyfikacji jest
geometryczna relacja w jakiej pozostają do siebie kierunek rozchodzenia się fali oraz kierunekdrgań cząsteczek (fragmentów) ośrodka sprężystego. Jeśli więc kierunki te są prostopadłe, tomówimy, że fala jest poprzeczna. Fale elektromagnetyczne są tego typu. Szarpnięta struna jestośrodkiem, w którym rozchodzą się fale poprzeczne. Innym przykładem są fale torsyjne w pręcie.Jeśli kierunki te są równoległe, to mówimy, że fala jest podłużna. Takimi są fale głosowe,z którymi związane są lokalne zgęszczenia i rozrzedzenia powietrza. Towarzyszą temu lokalnezmiany ciśnienia powietrza. Falą podłużną są także lokalne zgęszczenie odległości pomiędzyzwojami rozciągniętej sprężyny propagujące się wzdłuż osi sprężyny.W ciałach stałych mogą się rozchodzić oba typy fal. Natomiast w płynach tylko fale po-
dłużne.Zadanie 4. Uzasadnić prawdziwość dwóch ostatnich zdań.
18Inna definicja posługującą się pojęciem pola fizycznego jest następująca: Falą nazywamy propagujące sięze skończoną prędkością zaburzenie pola fizycznego (rozumianego jako wielkość fizyczna charakteryzująca stanrównowagi ośrodka), któremu towarzyszy transport energii.19W gazach, z uwagi na ustawiczny ruch cieplny molekuł, w stanach równowagi obserwujemy stały prze-pływ jego cząsteczek wzdłuż dowolnego kierunku. Tym niemniej wypadkowa liczba cząsteczek przepływającychtam i z powrotem w jednostce czasu przez jednostkową powierzchnię ustawioną prostopadle do danegokierunku jest równa zeru.
7
Niektóre fale występujące w naturze nie są ani poprzeczne ani podłużne. Przykładem służąfale rozchodzące się po powierzchni dostatecznie głębokiej wody. Torem ruchu cząsteczek wodyznajdujących się na powierzchni jest okrąg.Innym rodzajem fal są tzw. paczki falowe oraz impulsy falowe (czego dobrym przykładem
jest pojedynczy impuls rozchodzący się wzdłuż naciągniętego sznurka).
2.1. Prędkości stowarzyszone z ruchem falowym
Rozpatrując ruch biegnącej fali monochromatycznej powinniśmy zdawać sobie sprawę z tego,że poszczególne fragmenty ośrodka sprężystego, które podlegają odkształceniom, drgają (zazwy-czaj harmonicznie)20 wokół swoich ustalonych położeń równowagi i nie propagują się razemz falą biegnącą w ośrodku! To co my obserwujemy jako falę stanowi relacje w jakich pozostająze sobą fazy drgań poszczególnych części ośrodka sprężystego.Z każdą falą sprężystej stowarzyszone są trzy rodzaje prędkości. Są one powiązane ze sobą
określonymi zależnościami matematycznymi i odnoszą się do całkowicie odmiennych zjawiskfizycznych towarzyszących propagacji fali sprężystej.1. Prędkość cząstek – jest to prędkość chwilowa v (np. drgań harmonicznych) ruchucząsteczek (punktów) ośrodka sprężystego wokół ustalonych położeń równowagi; źródłemtego ruchu jest rozchodząca się fala.
2. Prędkość fazowa (falowa) – jest to prędkość c z jaką przemieszcza się w ośrodkupowierzchnia stałej fazy (np. garby lub doliny fali biegnącej w sznurku z przykładu 2)drgań cząsteczek ośrodka.Pod pojęciem powierzchni fazowej rozumiemy tutaj miejsce geometryczne punk-tów ośrodka sprężystego, w których faza drgań cząstek ośrodka jest taka sama.Pojęcie to omawiamy szczegółowo w dalszej części wykładu.Powierzchnia stałej fazy może przyjmować różne kształty. My będziemy się dalej zaj-mowali sprężystymi falami płaskimi, tj. takimi dla których powierzchnia stałej fazy jestpłaszczyzną. Jeśli obserwujemy ruch falowy w postaci rozchodzącego się ciągu garbówi dolin, to w rzeczywistości obserwujemy ruch oddzielnych oscylatorów harmonicznych(cząstek) ośrodka i w szczególności wszystkich tych oscylatorów leżących w jednej płasz-czyżnie ośrodka, które w danym momencie obserwacji mają tę samą wartość fazy (innymisłowy, wychylenie punktów ośrodka, należących do tej płaszczyzny, z położeń równo-wagi jest takie samo). Dobrym przykładem fali płaskiej może służyć powierzchnia wodyz umieszczonym na niej długim poziomym prętem wykonującycm ruch harmoniczny pro-sty. Pręt, będąc źródlęm fali wytwarza, na powierzchni wody fale płaskie biegnące odpręta po całej powierzchni wody w naczyniu. Punkty leżące jednocześnie na powierzchniwody i płaszczyźnie pionowej do powierzchni wody i równoległej do pręta tworzą w danejchwili płaszczyznę fazową, ponieważ cząstki ośrodka (na powierzchni wody) mają takiesamo wychylenie, tj. fazę drgań.
3. Prędkość grupowa – jest to prędkość vgr pakietu (grupy, paczki) fal (patrz poniżej).Ma ona duże znaczenie dla ruchu falowego ponieważ jest to prędkość z jaką przenoszonajest przez falę sprężystą energia. Fale z jakimi mamy zazwyczaj do czynienia są złożonez fal monochromatycznych, które są najprostrzym typem fal płaskich (patrz następnypodrozdział).
20Dobrym tego przykładem jest nieskończony naciągnięty sznur opisany wyżej, w którym falę wzbudza źródłoumieszczone na jednym z jego końców.
8
Mówiąc w ogromnym, zapewne nieco mylącym skrócie, uwa-
żam, iż to nieznajomość fundamentalnych praw fizyki unie-możliwia nam zrozumienie pojęcia umysłu w kategorich fizycz-
nych i logicznych.Roger Penrose21
3. Równanie fali monochromatycznej
Rozpatrzmy jednowymiarową poprzeczną falę płaską rozchodzącą się w nieskończonej stru-nie (tj. sprężystej nici) położonej wzdłuż dodatniego kierunku osi OX. Źródło fali, umieszczonew początku układu odniesienia, wykonuje drgania harmoniczne proste
y(x = 0, t) = A cos(ω · t+ α0), (3)
gdzie y – wychylenie punktów struny w pobliżu x = 0, A – amplituda drgań, ω =2πT– częstość
kołowa drgań, T – okres drgań, α0 – faza początkowa drgań. Wielkość Φ = ω · t+ α0 będziemydalej nazywali fazą drgań.Zapytajmy o wartość wychylenie y(x, t) punktów ośrodka odległych od źródła fali o x
w chwili czasu t. Aby odpowiedzieć na to pytanie załóżmy, że powierzchnia stałej fazy bie-gnie wzdłuż nici z prędkością fazową 0〈c〈∞22. Cząstki ośrodka odległe o x od źródła zacznądrgać po upływie czasu t1 =
x
cpotrzebnym do tego, aby fala (płaszczyzna fazowa) przebyła
odległość x. Zatem szukane wychylenie wynosi
y(x, t) = A cos(ω(t− t1) + α0) = A cos [ω(t− x/c) + α0] , (4)
gdzie założono, że w ośrodku nie występuje pochłanianie energii przenoszonej przez falę (am-plituda A nie ulega zmianie). Otrzymany wzór nosi nazwę równania fali monochromatycznej.Jego interpretacja jest następująca: zależność (4) określa wartość wychylenia punktów
ośrodka znajdujących się w punkcie odległym o x od źródła w chwili czasu t.Dodajmy, że wychylenie y(x, t) jest spowodowane dotarciem do tego punktu fali.Równaniu (4) zazwyczaj nadaje się inną równoważną postać:
y(x, t) = A cos(2πT(t− x/c) + α0
)
. (5)
Wprowadzimy obecnie ważne dla ruchu falowego wielkości.Długością λ fali23 nazywamy odległość między dwoma różnymi i najbliższymi
punktami ośrodka drgającymi (w tej samej chwili czasu) z fazami różniącymi sięo 2π.Częstością kołową ω fali nazywamy wielkość
ω =2πT. (6)
Liczbą falową k fali o długości fali λ nazywamy wielkość
k =2πλ. (7)
21Cytat pochodzi z książki: Roger Penrose, Nowy umysł cesarza, Wydawnictwo Naukowe PWN, Warszawa1995.22Oznacza to, że prędkość ta jest skończona.23Inna definicja ma postać: Długością fali nazywamy odległość λ, którą przebywa fala w ośrodku sprężystymw czasie T .
9

Częstotliwością fali f o okresie T nazywamy wielkość
f =1T. (8)
Jednostką częstotliwości jest Hz, którego wymiar jest równy s−1.Zadanie 5. Wyznaczyć wymiary ω, k, f .Jak wynika bezpośrednio z tej definicji różnica faz pomiędzy dwoma punktami ośrodka
powinna spełniać związek
2π =2πT(t− x1/c) + α0 −
2πT(t− x2/c) + α0 =
2π(x2 − x1)T · c
skądx2 − x1T · c =
λ
T · c, (9)
zatem
λ = c · T, (10)
czego należało oczekiwać zgodnie z alternatywną definicją wielkości λ.
Zadanie 6. Pokazać, że wielkość c :=λ
Tzwana prędkością fazową fali (patrz poniżej) wynosi
c =ω
k.
Za pomocą długości fali λ równaniu fali (5) można nadać inne postacie:
y(x, t) = A cos[
2π(
t
T− x
T · c)
+ α0]
, (11)
y(x, t) = A cos[
2π(
t
T− xλ
)
+ α0]
, (12)
y(x, t) = A cos [ω · t− k · x+ α0] , (13)
gdzie posłużono się wielkością k =2πλ=ω
c, zwaną liczbą falową, która określa liczbę długości
fali mieszczących się na odcinku o długości 2π.Zadanie 7. Zweryfikować poprawność ostatniej relacji.Zadanie 8. Kosinusosidalna fala rozchodzi się wzdłuż osi OX. Jej amplituda wynosi A = 0, 01
m, długość λ = 0, 4m, a częstotliwość f = 8 Hz. Poprzeczne wychylenie punktów ośrodkasprężystego dla t = 0 i x = 0 wynosi 0, 01m. Wyznaczyć wektor falowy k, okres T , częstośćkołową ω i prędkość c tej fali. Określić wartość α0 oraz podać równanie fali.
3.1. Prędkość fazowa fali monochromatycznej
Faza Φ fali monochromatycznej (13) wynosi
Φ = ω · t− k · x+ α0. (14)
Prędkość fazowa c jest zdefinicji równa pochodnej
c =dx
dt. (15)
Jej wartość wyznaczamy z warunku
Φ(x, t) = ω · t− k · x+ α0 = const,skąd, po obliczeniu różniczki zupełnej obu stron, otrzymujemy
dΦ = d(const) = 0 = ω · dt− k · dx. (16)
Zatem
c :=dx
dt=ω
k=λ
T. (17)
10

Warto zauważyć, że obliczana w ten sposób wartość c jest dodatnia. Interpretujemy to jakofalę rozchodzącą się w dodatnim kierunku osi OX.Równanie fali
y(x, t) = A cos [ω · t+ k · x+ α0] , (18)
jak łatwo się o tym przekonać bezpośrednim rachunkiem, opisuje falę rozchodzącą się w ujem-nym kierunku osi OX, ponieważ jej prędkość falowa c = −ω
k〈0.
Zadanie 9. Sprawdzić ostatni wynik samodzielnie.
Zadanie 10. Wyznaczyć prędkość poprzeczną vy =∂y
∂toraz przyspieszenie ay =
∂2y
∂t2cząste-
czek ośrodka dla x = const fali (13). Ile wynoszą wartości maksymalne wyznaczonych wielkości?Dla jakich chwil czasu vy oraz ay przyjmują wartości ekstremalne? Czy spełniona jest relacja:ay = −ω2yZadanie 11. Fala biegnąca w sznurze ma postać y(x, t) = 0, 35m sin(10πt− 3πx+ π/4). Ile
wynosi prędkość c i jaki jest kierunek rozchodzenia się tej fali? Jakie jest wychylenie punktówośrodka dla t = 0 i x = 0, 10 m? Ile wynosi długość i częstość tej fali? Ile wynosi maksymalnawartość prędkości poprzecznej?Na zakończenie tego podrozdziału podamy jeszcze kilka użytecznych wyrażeń.Równanie jednowymiarowej fali płaskiej tłumionej ma postać
y(x, t) = A0 exp(−γt) cos(ωt− kx+ α0), (19)
gdzie γ – współczynnik pochłaniania fali przez ośrodek sprężysty. Podane wyrażenie uwzględniatłumienie fali monochromatycznej, za które odpowiada rozpraszanie (mówimy także dysypacja)energii fali (patrz dalej) w ośrodku sprężystym. Zmiejszanie się energii płaskiej fali monochro-matycznej – co przejawia się jako malenie amplitudy drgań fali – jest spowodowane pochłania-niem przez cząsteczki ośrodka energii fali oraz innymi procesami termodynamicznymi, którymtowarzyszy zamiana energii fali w ciepło.Równanie fali sferycznej (bez uwzględniania pochłaniania), nazywanej tak z uwagi na sfe-
ryczny kształt powierzchni fazowych, ma postać
u(r, t) = A(r) cos(ωt− kr + α0) =A0rcos(ωt− kr + α0). (20)
Przytoczoną tutaj zależność A(r) amplitudy od odległości jest stosunkowo łatwo zrozumieć,jeśli zauważyć, że całkowita moc energii przechodzącej przez jednostkę powierzchni ustawionejw odległości r od źródło fali sferycznej jest proporcjonalna do A2(r). Całkowita moc fali emito-wanej przez źródło fali sferycznej nie zależy od r i w odległości r od źródła jest proporcjonalna
do A2 · 4πr2. Ponieważ A2 · 4πr2 = const, więc A(r) ∼ 1r.
Innym rodzajem równania fali może być zależność typu
y(x, t) =A
(B · x−D · t)2 + E , (21)
gdzie A,B,C,D stałe i dodatnie współczynniki liczbowe (jakie są ich wymiary?), które opisujepropagowanie się (w prawo) pojedynczego impulsu (garbu) w ośrodku sprężystym, o czymmożemy się przekonać sporządzając wykresy zależności y(x, t) dla kolejnych chwil czasu (np.dla t = 0, 1, 2, . . .). Dodajmy, że y ma wymiar metra.Zadanie 12. Narysować wykres (21) jako funkcji x dla wybranych chwil czasu. Co przedsta-
wiają otrzymane wykresy?Zadanie 13. Wyznaczyć wymiary wielkośći A,B,D,E występujących w (21)Zadanie 14. Wyznaczyć prędkość rozchodzenia się impulsu (21).Zadanie 15. Jaki obiekt falowy opisuje równanie
y(x, t) =A
(B · x+D · t)2 + E . (22)
11

3.2. Równanie fali płaskiej rozchodzącej się w dowolnymkierunku
Znajdziemy obecnie równanie fali płaskiej rozchodzącej się w dowolnym kierunku, tj. którejkierunek propagacji tworzy kąty (α, β, γ) odpowiednio z osiami OX, OY, OZ kartezjanskiegoukładu współrzędnych.Niechaj źródłem fali będzie wykonująca ruch harmoniczny prosty u0 = A cos(ω · t + α0)
płaszczyzna P0 przechodząca przez początek układu współrzędnych. Rozpatrzmy płaską po-wierzchnię P1 stałej fazy odległą od źródła o d. Drgania punktów tej płaszczyzny są opóźnionew czasie o τ = l/c w stosunku do drgań punktów płaszczyzny P0. Zatem zależność od czasuwychylenia tych punktów opisuje równanie
u = A cos[ω(t− d/c) + α0] = A cos(ω · t− k · l + α0).Wyrazimy teraz odległość l za pomocą współrzędnych punktów należących do płaszczyzny P1.Wprowadźmy w tym celu jednostkowy wektor n, który jest prostopadły do płaszczyzny P1.Z rysunku widać, że iloczyn skalarny wektora wodzącego r dowolnego punktu płaszczyzny P1oraz wektora n wynosi
r · n = r cos(φ) = l.Po podstawieniu tego wyniku do przedostatniego wyrażenia otrzymujemy
u = A cos(ω · t− k · n · r+ α0). (23)
Wektor n · k ma długość równą 2πλ. Jest więc liczbą falową k i jest jednocześnie prostopadły
do płaszczyzny stałej fazy P1. Dlatego nazywany jest wektorem falowym. Zatemu(r, t) = A cos(ω · t− k · r+ α0) (24)
opisuje zależność wychylenia z położenia równowagi dowolnego punktu odległego od początkuukładu o r i należącego do płaszczyzny P1 w chwili czasu t. Jest więc poszukiwanym przeznas równaniem fali płaskiej rozchodzącej się w dowolnym kierunku wyznaczonym przez wektorfalowy k. Ponieważ iloczyn skalarny k · r = kxx+ kyy + kzz, więc
u(r, t) = A cos(ω · t− kxx− kyy − kzz + α0), (25)
gdzie
kx =2πλcos(α), ky =
2πλcos(β), kz =
2πλcos(γ).
Relacja (25) określa zależność wychylenia z położenia równowagi dowolnego punktu o współ-rzędnych (x, y, z) należącego do płaszczyzny P1 w chwili czasu t.Zauważmy, że dla kx = k, ky = kz = 0 otrzymane wyniki opisują propagację fali płaskiej
wzdłuż osi OX (patrz równanie (13) w poprzednim rozdziale).Równanie fali często zapisujemy w postaci zespolonej
u = ℜ [A exp[i(ω · t− k · r+ α0)]] , (26)symbol ℜ oznacza część rzeczywistą liczby zespolonej A exp[i(ω · t− k · r+α0)] = A cos(ω · t−k · r+ α0) + i · A · sin(ω · t− k · r+ α0), gdzie skorzystano z wzoru Eulera
exp(iz) = cos(z) + i sin(z). (27)
Jeśli wprowadzić zespoloną amplitudę A = A · exp(iα0), to równanie fali płskiej możnazapisać w postaci
u = ℜ[
A exp[i(ω · t− k · r)]]
. (28)
12

Fraktal jest sposobem widzenia nieskończoności okiem duszy.
James Gleick24
4. Równanie falowe
Równanie fali (13) jest rozwiązaniem pewnego równania zwanego równaniem falowym.Przystąpimy obecnie do jego wyprowadzenia. Najpierw przedstawimy bardzo uproszczony spo-sób otrzymywania tego równania posługująć się równaniem (13). Następnie wyprowadzimy jew kilku prostych przypadkach posłygując się drugą zasadą dynamiki.
4.1. Proste wyprowadzenie
W celu wyprowadzenia równania falowego wyznaczymy odpowiednie pochodne cząst-kowe rówania płaskiej fali monochromatycznej (25) i następnie wskażemy na pewne zależnościpomiędzy nimi.Różniczkujemy dwukrotnie wyrażenie (25) względem zmiennych x, y, z oraz t. W rezultacie
otrzymujemy∂2u
∂x2= −k2xA cos[ω · t− k · r+ α0] = −k2xu,
∂2u
∂y2= −k2yA cos[ω · t− k · r+ α0] = −k2yu,
∂2u
∂z2= −k2zA cos[ω · t− k · r+ α0] = −k2zu,
∂2u
∂t2= −ω2A cos[ω · t− k · r+ α0] = −ω2u.
Dodajmy stronami pochodne cząstkowe względem zmiennych przestrzennych. Wtedy∂2u
∂x2+∂2u
∂y2+∂2u
∂z2=△u = −(k2x + k2y + k2z) · u = −k2 · u, (29)
gdzie wprowadzono operator Laplace’a, zwany krótko laplasjanem
△u = ∂2
∂x2+∂2
∂y2+∂2
∂z2.
Zauważmy ponadto, że wyrażenie na pochodną cząstkową względem czasu
u = − 1ω2∂2u
∂t2.
Po podstawieniu tego wyrażenia do (29) otrzymujemy poszukiwaną postać równania falowego
△ u = ∂2u
∂x2+∂2u
∂y2+∂2u
∂z2= −k2 ·
(
− 1ω2∂2u
∂t2
)
=1c2∂2u
∂t2, (30)
gdzie wykorzystano związek c =ω
k.
Zadanie 16. Pokazać, że ((6)÷ (8)) spełniają jednowymiarowe równanie falowe (30), w któ-rym k = kx, ky = kz = 0 i c = ω/k.
24Cytat pochodzi z książki: James Gleick, Chaos, Wydawnictwo Zysk i S–ka Wydawnictwo, Poznań 1996.
13

4.2. Liniowe równanie falowe
Wyprowadzimy obecnie równanie jednowymiarowej fali poprzecznej (dla takiej fali kx 6=0, ky = kz = 0) poruszającej się wzdłuż struny.Niechaj struna poddana będzie działaniu stałej siły naciągu N = const. Liniowa gęstość
ρl =m
l= const (o wymiarze kg/m) masy struny, gdzie m i l są masą i długością struny.
Jeden (lewy) koniec struny umieszczono w początku układu odniesienia, którego oś OY jestrównoległa do kierunku wychyleń z położenia równowagi punktów struny.Rozpatrzmy równanie ruchu masy ∆m struny położonej pomiędzy punktami struny o współ-
rzędnych x i x+∆x, długości ∆s =
√
1 +(∆y∆x
)2
∆x ≃ ∆x25 i masie ∆m = ρl ·∆x26. Niechajy(x, t) będzie wychyleniem tak wybranego fragmentu masy struny z położenia równowagi wy-wołanego rozchodzeniem się fali. Sformułujemy obecnie równanie ruchu masy ∆m. Z drugiejzasady dynamiki Newtona wynika, że
∆m · ay = ρl∆x∂2u
∂t2= Fy, (31)
gdzie ay jest y–kową składową przyspieszenia masy ∆m, a Fy jest składową wypadkowej siływ kierunku OY. Wartość siły Fy wynosi (patrz rysunek)
Fy = F (x+∆x)− F (x) = N sin[Θ(x+∆x, t)]− F sin[Θ(x, t)] ≃≃ N tan[Θ(x+∆x, t)]−N tan[Θ(x, t)]
Fy ≃ N[(
∂y
∂x
)
x+∆x−(
∂y
∂x
)
x
]
≃ N ·∆x∂2y
∂x2.
Ostatnia równość została otrzymana w wyniki rozwinięcia pochodnej(
∂y
∂x
)
x+∆xw punkcie
x+∆x, co prowadzi do(
∂y
∂x
)
x+∆x≃(
∂y
∂x
)
x
+
(
∂2y
∂x2
)
x
∆x+O(∆x)2.
Dodajmy, że nasze rozważania przeprowadziliśmy przy założeniu o małości odkształceń ∆ypoprzecznych struny, co pozwala stosować przybliżenia typu
Θ(x, t) ≃ sin[Θ(x, t)] ≃ tan[Θ(x, t)] = ∂y∂x.
Po podstawieniu przedostatniego związku do (31) otrzymujemy
ρl∆x ·∂2y
∂t2= N · ∂
2y
∂x2Temu rezultatowi nadamy obecnie postać poszukiwanego jednowymiarowego równania falowego
∂2y
∂x2=1
(Nρl
)
∂2y
∂t2=(1c
)2 ∂2y
∂t2, (32)
gdzie c =
√
Nρljest prędkością fazową jednowymiarowej fali poprzecznej rozchodzącej się wzdłuż
struny.
Zadanie 17. Pokazać, że wymiaremNρljest m2/s2.
Jak widzimy równanie falowe (32) wiąże ze sobą przyspiesznie oscylatora harmonicznego∂2y
∂t2
z drugą pochodną przemieszczenia, tj.∂2y
∂x2. Współczynnikiem proporcjonalności jest czynnik c2.
Po której ze stron równania falowego on występuje łatwo ustalić za pomocą analizy wymiarowej.25Zakładamy więc, że ∆y ≪ ∆x.26Zauważmy, że symbol △ oznacza laplasjan, a ∆ jest literą grecką stosowaną tutaj do oznaczenia małychwielkości lub ich przyrostów.
14

Przedstawione wyprowadzenie równania falowego pozwala wyznaczyć bezpośrednim rachun-kiem wartość prędkości c fazowej fali. Nie jest to możliwe w podejściu zaprezentowanym w trak-cie prostego wyprowadzenia równania falowego. Jak widzimy prędkość fali c zależy jedynieod właściwości ośrodka sprężystego.Zadanie 18. Sprawdzić bezpośrednim rachunkiem, że równanie fali kosinusoidalnej y(x, t) =
A cos[ωt− kx], gdzie ω/c = k = 2π/λ jest rozwiązaniem (32).Na przykładzie fali (13) z φ = 0 można prześledzić wszystkie podstawowe właściwości ruchu
falowego.1. Prędkość fazowa jest równa c = ω/k, co pozostawiam do samodzielnego obliczenia.2. Prędkość cząstek ośrodka w punkcie x i chwili czasu t wynosi
v(x, t) = ∂y/∂t = −Aω sin(ωt− kx).3. Jak pokażemy, dalej względne odkształcenie ε(x) elementu ośrodka o długości ∆x w punk-cie x zależy od x i od t i wynosi (dla ∆x→ 0)
ε(x, t) =∂y
∂x= Ak sin(ωt− kx).
Zadanie 19. Pokazać, że ε(x, t) jest wielkością bezwymiarową.Zatem
v =∂y
∂t= −ωk
∂y
∂x= −c∂y
∂x= −cε(x, t),
co oznacza, że prędkość cząsteczek ośrodka v jest proporcjonalna do wartości ε(x, t).4. Cząstki ośrodka nie przemieszczają się wraz z falą. Drgają one wokół swoich położeńrównowagi. Łatwo się o tym przekonać licząc wartość średnią 〈v(x)〉 prędkości v(x, t) poczasie t = T , gdzie T jest okresem fali. Wtedy 〈v(x)〉 = 1
T
∫ T
0−Aω sin(ωt − kx)dt = 0,
ponieważ obliczamy w ten sposób całkę z funkcji okresowej po przedziale równym jejokresowi.
Zadanie 20. Pokazać bezpośrednim rachunkiem, że 〈v(x)〉 = 1T
∫ T
0−Aω sin(ωt− kx)dt =
0.Zadanie 21. Narysować na jednym rysunku, dla ustalonego t = const, następujące zależności:
(1) y(x, t); (2) v(x, t); (3) ε(x, t); (4) Wartości poprzecznej siły −N ∂y(x, t)∂x
pochodzącej od fali
i działającej na cząstki ośrodka położone w pobliżu punktu x, jeśli y(x, t) = A cos[ωt− kx].Jeśli zamiast struny ośrodkiem, w którym rozchodzi się jednowymiarowa fala poprzeczna
byłby pręt o polu przekroju poprzecznego S i trójwymiarowej gęstości masy ρ (o wymiarzekg/m3), to analogiczne do przedstawionego wyżej rozumowanie prowadzi do rówania falowego
∂2y
∂x2=1
(NSρ
)
∂2y
∂t2=(1c
)2 ∂2y
∂t2, (33)
gdzie c =
√
NSρjest prędkością fazową jednowymiarowej fali poprzecznej rozchodzącej się wzdłuż
pręta. Jak widzimy uwzględnienie skończonej grubości pręta prowadzi do prostej zamiany ρl →ρ · S (porównaj (32) i (33)) co jest konsekwencją tego, że w przypadku pręta ∆m = ρ · S ·∆x.Rozwiązaniem równania falowego (32) jest każda funkcja27 f postaci
f (−)(x, t) = f(x− c · t),lub
f (+)(x, t) = f(x+ c · t).27Dostatecznie regularna, tj. posiadająca pochodne cząstkowe drugiego rzędu względem zmiennej czasoweji przestrzennej
15

Zadanie 22. Sprawdzić bezpośrednim rachunkiem, że funkcje f (±) są rozwiązaniami jedno-wymiarowego równania falowego (32).Zadanie 23. Pokazać, że wyprowadzone wcześniej przez nas postacie równania fali (patrz
równania (6÷8)) są także rozwiązaniami równania falowego (32).Zadanie 24. Pokazać, że jeśli zastąpimy funkcję cos występującą w wyprowadzonych wcze-
śniej równaniach fali (6÷8)) przez funkcję sin, to tak otrzymana funkcja jest także rozwiązaniemrównania falowego (32).Zadanie 25. Do pionowej ściany przymocowany jest za jeden koniec cienki sznurek, na
którego drugim końcu przewieszonym przez bloczek wisi ciężarek o masie mc = 20kg. Długośćsznurka l = 5 m, a jego masa msz = 0.2 kg. Wyznaczyć prędkość c fali poprzecznej w tymsznurku.Zadanie 26. Czy można wyznaczyć wartość przyspieszenia ziemskiego g w warunkach z za-
dania poprzedniego, jeśli znamy: czas τ przelotu fali poprzecznej od początku do końca sznurka,l, msz i mc?Zadanie 27. Pokazać, że funkcje: (A) y(x, t) = ln[b(x − ct)], (B) y(x, t) = exp[b(x − ct)],
(C) y(x, t) = x2 + c2t2, (D) y(x, t) = sin(x) cos(ωt) są rozwiązaniami równania falowego. Czyfunkcje (C) i (D) są postaci f(x+ ct) + g(x− ct)28?
4.3. Prędkość impulsu poprzecznego w strunie
Wyprowadzenie prędkości fali zaprezentowane powyżej można nieco uprościć. Przedsta-wiamy to poniżej dla poprzecznego impulsu rozchodzącego się wzdłuż struny.Niechaj, tak jak poprzednio, mały odcinek struny o długości ∆l tworzy, pod wpływem
biegnącego w ośrodku impulsu falowego, wycinek koła o promieniu R (patrz rysunek). W ukła-dzie odniesienia poruszającym się z impulsem (jego prędkość jest stała) odcinek ∆l poru-sza się pod wpływem siły wypadkowej Fwyp = 2F sin(Θ) ≃ 2FΘ. Mały segment ma masę∆m = ρl ·∆l ≃ 2ρlRΘ (patrz rysunek). Zgodnie z drugą zasadą dynamiki wartość siły dośrod-kowej
Fd =∆mc2
R=2ρlRΘc2
R= 2FΘ. (34)
Rozwiązanie tego równania względem c daje
c =
√
F
ρl. (35)
Jest to więc ten sam wynik, ale otrzymany bez założenia o jakimkolwiek kształcie impulsurozchodzącego się w ośrodku.Zadanie 28. Dwa impulsy, rozchodzące się po tej samej strunie, są opisywane równaniami
y1(x, t) =0.05
(30x − 45t)2 + 2 ,
y2(x, t) =−0.05
(30x + 45t− 33)2 + 2 .
W którym kierunku porusza się każdy z nich? Po upływie jakiego czasu oba impulsy zniosą sięwzajemnie (możemy mówić o anihilacji impulsów)? W którym miejscu ośrodka to się zdarzy?Zadanie 29. Falę poruszająca się wzdłuż osi OX opisuje równanie
y(x, t) = 2, 0 exp[−(x+ 10t)2],gdzie y, x w metrach, a t w sekundach. Określić kierunek rozchodzenia się fali oraz jej prędkośćc.28W przypadku (C) mamy y(x, t) = (1/2)[(x+ ct)2 + (x− ct)2]. W przypadku (D) należy zauważyć, że jeślima być spełniona równość 1/2 sin(x) cos(ωt) = (1/2)[sin[(a+ b)/2] cos[(a− b)/2] = sin(a) + cos(b), to powinnyzachodzić związki x = (a+ b)/2 i ct = (a − b)/2 skąd wyznaczamy a = x+ ct oraz b = x− ct
16

4.4. Jednowymiarowa fala podłużna w pręcie
Niechaj wzdłuż jednorodnego pręta o długości L, powierzchni przekroju poprzecznego Si gęstości ρ = const (bo pręt z założenia jest jednorodny) rozchodzi się fala podłużna równolegledo osi poziomo ułożonego pręta.Jeden (lewy) koniec pręta umieszczono w początku układu odniesienia. Oś pręta jest rów-
noległa do osi OX. Przesunięcie u(x, t) (równolegle do osi pręta i osi OX) fragmentu masy∆m = ρS∆x pręta położonego wokół punktu o współrzędnej x zależy od czasu t oraz x (bojest ono wywołane rozchodzeniem się fali podłużnej). Jeśli punkty pręta o współrzędnej x mająw chwili t wychylenia określone za pomocą u(x, t), to punkty pręta znajdujące się w położeniux+∆x mają wychylenia u(x+∆x, t) 6= u(x, t), przy czym u(x+∆x, t) ≃ u(x, t) +∆u. Ozna-cza to, że objętość fragmentu masy ∆m doznaje odkształcenia sprężystego, którego wartość
bezwzględna wynosi ∆u zaś względne wydłużenie ε jest równe ε =∆u∆x. Zauważmy, że wartość
ε jest funkcją czasu oraz współrzędnej przestrzennej x, ponieważ od tych wielkości zależy ∆u.Dla dostatecznie małych wartości ∆x możemy przyjąć, że
ε(x, t) =∂u(x, t)∂x
. (36)
Jak wiemy względna deformacja ε(x, t) 6= 0 świadczy o tym, że w punkcie pręta o współ-rzędnej x działa naprężenie σ(x, t), którego wartość jest związana z ε(x, t) prawem Hooke’a
σ(x, t) = Eε = E ∂u(x, t)∂x
, (37)
gdzie E jest modułem Younga materiału pręta.Zauważmy w tym miejscu, że jeśli u(x, t) = u0 cos(ωt − kx + α0) (zakładamy, że biegnąca
fala podłużna ma postać monochromatycznej fali płaskiej, zwanej także falą sinusoidalna albo
kosinusoidalną), to ε =∂u
∂x= −ku0 sin(ωt − kx + α0). Oznacza to, że w danej chwili czasu t
względne odkształcenie ε(x, t) oraz naprężenie σ(x, t) zależą od x. W punktach ośrodka, dlaktórych wychylenia u(x, t) są ekstremalne mamy ε0(x, t) = σ0(x, t) = 0 (dlaczego?). Tam gdziewychylenia u(x, t) są równe zeru obserwujemy maksymalne wartości bezwzlędne odkształceńεmax,min(x, t) i naprężeń σmax,min(x, t) (dlaczego?). Przy czym dodatnie (rozciąganie) i ujemne(ściskanie) wartości odkształceń εmax oraz εmin występują na przemian. Swiadczy to o tym, żepoprzecna fala składa się z ciągu zgęszczeń i rozrzedzeń ośrodka w którym się rozchodzi.Napiszemy obecnie równanie ruchu fragmentu ∆m pręta położonego w pobliżu punktu x
poruszającego się pod wpływem rozchodzącej się w pręcie fali. Zgodnie z drugą zasadą dynamiki
∆m · ∂2u
∂t2= ρ · S ·∆x · ∂
2u
∂t2= S · [σ(x+∆x+ u+∆u)− σ(x+ u)] , (38)
gdzie σ(x+∆x+ u+∆u) i σ(x+ u) są wartościami naprężeń w odpowiednich punktach prętaokreślonych argumentami funkcji σ.W celu uproszczenia dalszego zapisu i toku rozumowania przyjmiemy dodatkowe założenia:
σ(x+∆x+ u+∆) ≃ σ(x+∆x), σ(x+ u) ≃ σ(x) (39)
które – jak to pokazujemy w podrozdziale następnym – nie wpływają na końcowy wynik29.Wtedy
σ(x+∆x+ u+∆u)− σ(x+ u) ≃ σ(x+ ∆x)− σ(x) (40)
oraz zgodnie z prawem Hooke’a (37)
σ(x) = E(
∂u
∂x
)
x
. (41)
29Jest to spowodowane tym, że w odpowiednie wyrażenia wchodzi różnica σ(x+∆x+u+∆)−σ(x+u) orazspełniona jest nierówność u(x, t)≪ ∆x.
17
Równanie ruchu (38) przyjmuje obecnie postać
ρ∆x · S · ∂2u
∂t2= S · (σ(x+∆x)− σ(x)). (42)
Ostatnią równość, po uwzględnieniu (41), zapiszemy w następujący sposób
ρ · S · ∂2u
∂t2= S · lim
∆x→0
E
(
∂u
∂x
)
x+∆x−(
∂u
∂x
)
x
∆x
= S∂
∂x
(
E ∂u∂x
)
= S · E · ∂2u
∂x2,
które po stosownych uproszczeniach30 jest równaniem falowym dla poprzecznej fali w pręcie∂2u
∂x2=ρ
E∂2u
∂t2. (43)
Jak wynika z postaci tego równania prędkość fal podłużnych w pręcie wynosi
c(||) =
√
Eρ. (44)
Poniżej w tabeli podajemy wartości c(||) w prętach dla wybranych materiałów.
Materiał c(||) Materiał c(||)
m/s m/sPb 1200 Cyna 2730
Mosiądz 3300 Cu 3710Cynk 3810 Szkło flint 4000Ni 4780 Al 5040Fe 5100 kwarc topiony 5370
Bardzo podobne rozważania można przeprowadzić w przypadku propagowania się wzdłużrozpatrywanego pręta skręcenia (fal torsyjnych). Jeśli oznaczymy przez φ(x, t) kąt skręceniaprzekroju znajdującego się w położeniu x w chwili czasu t, to równanie falowe opisujące propa-gację poprzecznej fali odkształceń φ(x, t) ma postać
∂2φ
∂x2=ρ
G∂2φ
∂t2. (45)
Jak stąd wynika prędkość fal poprzecznych w pręcie wynosi
c(⊥) =
√
Gρ, (46)
gdzie G jest modułem skręcania (ścinania lub sztywności)31. Moduły G oraz E są ze sobązwiązane relacją
G = E2(1 + µ)
, (47)
gdzie µ jest współczynnikiem Poissona. Jeśli pręt o średnicy d poddany jest rozciąganiu (ści-skaniu), to jego długość początkowa l zmienia się o ∆l, zaś d o ∆d. Współczynnik Poissonaokreśla związek:
µ =
∆dd∆ll
. (48)
Pokazuje się, że współczynnik Poissona spełnia nierówność
0〈µ〈0, 5. (49)
30Założyliśmy jednorodność pręta więc E nie może zależeć od x lub t.31Jeśli do górnej płaszczyzny ciała stałego w kształcie sześcianu przyłożymy stycznie do tej ściany naprężenieσ||, to górna płaszczyzna zostanie odchylona od pionu o kąt γ, taki że γ = χ · σ, gdzie χ jest współczynnikiemścinania, skręcania lub sztywności. Modułe ścinania G = 1/χ
18

Zatem G〈E.Zadanie 30. Uzasadnić ostatnią nierówność.Poniższa tabela podaje wartości odpowiednich współczynników, które omówiliśmy wcze-
śniej.
Ciało E G µ1012 N/m2 1012 N/m2
Al 0,071 0,027 0,34Pb 0,017 0,006 0,45Cu 0,100 0,048 0,34
Mosiądz 0,100 0,035 0,33Stal 0,217 0,083 0,30Szkło 0,05÷0,083 0,027 0,30Al 0,071 0,027 0,34
Wyprowadzone powyżej równania falowe mogą być zastosowane do rozchodzenia się falpoprzecznych i podłużnych w ciałach stałych. Odpowiednie równania falowe wyprowadza sięrozpatrując fragment ośrodka sprężystego (ciała stałego) w kształcie walca i dalsze rozważaniasą analogiczne do przeprowadzonych tutaj dla przypadku fal rozchodzących się wzdłuż pręta.Poniżej podajemy wartości prędkości fal sprężystych w cialćh stałych:Prędkość fali podłużnej w ciele stałym (w nieskończonym ośrodku)
c(||) =
√
√
√
√
E(1− µ)ρ(1 + µ)(1− 2µ) . (50)
Prędkość fali poprzecznej w ciele stałym (w nieskończonym ośrodku)
c(⊥) =
√
Gρ=
√
E2ρ(1 + µ)
. (51)
Jak widzimy c(||) ≥ c(⊥) oraz
c(||) = c(⊥)√
1− µ1− 2µ.
Zadanie 31. Wyprowadzić ostatnią równość korzystając z podanych wcześnie związków.Przedstawione zależności obserwuje się m.in. podczas trzęsień Ziemi, kiedy to sejsmografy
rejestrują najpierw dobiegające doń z epicentrum fale podłużne (tzw. primary waves), a po nichdopiero docierają fale poprzeczne (tzw. secondary waves). Różnica pomiędzy czasami odbioruprzez sejsmografy obu typów fal służy do określenia odległości od sejsmografu do epicentrum.Zadanie 32. Wyjaśnij poprawność takiego rozumowania.Analiza rozchodzenia się fal w objętości Ziemi pokazała, że fale poprzeczne nie przenikają
przez jądro Ziemi. Świadczy to o tym, że wnętrze Ziemi (jego jądro) jest płynne.Zadanie 33. Wyznaczyć prędkość dźwięku w rtęci, dla której moduł ściśliwości objętościowej
jest równy 2, 8 · 1010 N/m2 i gęstość 13.600 kg/m3.Zadanie 34. Gęstość aluminium wynosi ρAl = 2, 7 · 103 kg/m3, a prędkość fali podłużnej
v = 5100 m/s. Ile wynosi moduł Younga dla aluminium?Zadanie 35. Poprzeczna fala biegnie z prędkością v = 30 m/s w strunie poddanej naprężeniu
N = 10 N. Dla jakiej wartości N prędkość tej fali będzie równa 60 m/s?Zadanie 36. Wahadło matematyczne składa się z kulki o masie M wiszącej na cienkim
sztywnym pręcie masy m ≪ M i długości L. Wyznaczyć prędkość poprzecznych fal w pręciewahadła, jeśli jego okres drgań wynosi T .Zadanie 37. Stalowy drut o długości Ls jest połączony z miedzianym drutem o długości Lm.
Oba tworzą jeden pręt o długości L = Ls + Lm. Przekrój każdego drutu jest taki sam, a jegopowierzchnia jest równa S. Druty rozciąga siła N . Jak długo biegnie podłużna (poprzeczna)fala sprężysta od jednego do drugiego końca drutu?
19

Zadanie 38. Fala sinusoidalna biegnie wzdłuż sznurka. Źródło fali wykonuje n pełnych drgańw ciągu czasu tn. Ponadto, dane maksimum fali (garb) przebywa odległość s w czasie ts. Ilewynosi długość tej fali?Zadanie 39. Dwie fale sinusoidalne:
y1(x, t) = 4,0 sin(3,0x− 20t), y2(x, t) = 8,0 cos(3,0x − 20t)rozchodzą się jednocześnie w ośrodku sprężystym. Pokazać, że wypadkowa fala y(x, t) =y1(x, t) + y2(x, t) jest także falą sinusoidalną oraz obliczyć jej fazę oraz amplitudę. Ws-ka.Skorzystać z zależności trygonometrycznej A sin(α + β) = A[sin(α) cos(β) + sin(β) cos(α)],gdzie α = 3, 0x − 20t Następnie wyznaczyć takie A oraz β, aby spełniona była równośćy(x, t) = A sin(α + β).Zadanie 40. Nietoperz jest w stanie dokonać detekcji małego obiektu (insekta) o rozmia-
rze liniowym porównywalnym z długością fali emitowanej przez nietoperza32. Ile wynosi tenrozmiar liniowy, jeśli nietoperz emituje ultradźwięki o częstości 50, 0 kHz, a prędkość dźwiękuw powietrzu vd ≃ 340 m/s?Zadanie 41. Napisać równanie fali sinusoidalnej (tj. jawną zależność y(x, t)) biegnącej wzdłuż
sznura w ujemnym kierunku osi OX, jeśli jej amplituda A = 4, 0 cm, λ = 100, 0 cm, f = 4, 0Hz gdy: (a) y(0, t) = 0 dla t = 0; (b) y(x, 0) = 0 dla x = 20, 0 cm.Zadanie 42. Fala poprzeczna w strunie ma postać y(x, t) = (0, 20)m sin π(x/10 + 5t). (A)
Określić prędkość poprzeczną i przyspieszenie struny dla t = 0, 5 s dla punktów położonychw x = 2 m. (B) Ile wynoszą długość λ, okres T , częstość f , częstość kołowa ω, wektor falowy kprędkość fazowa c tej fali?
4.5. Dodatek I
W tym podrozdziale wyprowadzamy równanie fali poprzecznej rozchodzącej się w pręcie bezupraszczającego założenia (39).Wartości pochodnych cząstkowych występujących w (41) obliczamy korzystając z następującej
relacji (jest to obcięty szereg Taylora)(
∂u
∂x
)
x+∆≃(
∂u
∂x
)
x
+[
∂
∂x
(
∂u
∂x
)]
x
∆+ . . . . ≃(
∂u
∂x
)
x
+
(
∂2u
∂x2
)
x
∆.
Na podstawie tej zależności otrzymujemy(
∂u
∂x
)
x+∆x+u+∆u=(
∂u
∂x
)
x
+
(
∂2u
∂x2
)
x
(∆x+ u+∆u),
gdzie rozwinięcie Taylora przeprowadzono wokół punktu x zaś ∆ = ∆x+ u+∆u oraz(
∂u
∂x
)
x+u=(
∂u
∂x
)
x
+
(
∂2u
∂x2
)
x
u,
gdzie rozwinięcie Taylora przeprowadzono wokół punktu x zaś ∆ = u. Różnica dwóch ostatnichwyrażen jest równa
(
∂u
∂x
)
x+∆x+u+∆u−(
∂u
∂x
)
x+u≃(
∂2u
∂x2
)
x
(∆x+∆u) ≃(
∂2u
∂x2
)
x
∆x,
ponieważ ∆u≪ ∆x (dlatego człon(
∂2u
∂x2
)
x
∆u może być w naszych rozważaniach pominięty).
Po uwzględnieniu powyższych zależności równanie ruchu (42) przyjmuje prostą postać
ρ · S∆x · ∂2u
∂t2= S · E · ∂
2u
∂x2,
32Nietoperz nie widzi mniejszych obiektów, ponieważ ultradźwięki się na nich uginają i interferują zamazująccałkowicie obraz tego przedmiotu. Podobnie za pomocą fali świetlnej o długości λ jesteśmy, w zasadzie, w staniewidzieć przedmioty o rozmiarach liniowych rzędu λ.
20
które po stosownych uproszczeniach jest równaniem falowym dla poprzecznej fali w pręcie∂2u
∂x2=ρ
E∂2u
∂t2. (52)
, otrzymanym poprzednio po przyjęciu upraszczającego założenia (39).
W nauce istnieje uświęcony obyczajem sposób ustalania, czy
teoria jest słuszna. Jest to mianowicie eksperyment.Mówiąc ściśle, eksperyment może jedynie wykazać, że teoria
jest błędna, nigdy nie możemy być absolutnie pewni, że jestona słuszna.
Ian Stewart33
5. Energia fali sprężystej
Zajmiemy się obecnie charakterystyką ilościową energii przenoszonej przez fale sprężyste.Niechaj w ośrodku sprężystym rozchodzi się monochromatyczna fala płaska, która powoduje
wychylenie
u(x, t) = A0 cos(ωt− kx+ α0), (53)
cząstek ośrodka w pobliży punktu x w chwili czasu t. Fala ta powoduje:
1. Drgania harmoniczne cząstek ośrodka wokół położeń równowagi, o czym możemy sięprzekonać kładąc w (53) x = x1 = const. Wtedy u(x, t) = A0 cos(ωt − kx1 + α0) =A0 cos(ωt + α1), gdzie α1 = −kx1 + α0 = const, co jest równaniem drgań harmonicz-nych prostych. Z ruchem tym związana jest energia kinetyczna Ek, której warość jestproporcjonalna do kwadratu prędkości chwilowej v = ∂u/∂t cząstek ośrodka.
2. Odkształcenia sprężyste fragmentów ośrodka o objętości ∆V . Z tym typem odkształceniazwiązana jest potencjalna energia odkształcenia sprężystego Epot, którego wartość jestproporcjonalna do kwadratu względnego odkształcenia34 ε(x, t) = ∂u/∂x.
Rozpatrzmy fragment ośrodka sprężystego o objętości ∆V , gęstości masy ρ, masie ∆m =ρ ·∆V , na tyle mały, że v = ∂u/∂t = v(t) i odkształcenie względne ε(x, t) = ∂u/∂x = ε(t) sąfunkcjami jedynie zmiennej t35. Całkowita energia mechaniczna skoncentrowana w wyróżnionymelemencie ośrodka wynosi
∆Emech(x, t) = ∆Ekin(x, t) + ∆Epot(x, t), (54)
gdzie
∆Ekin(x, t) =∆mv2(x, t)2
=ρ∆V
(
∂u(x, t)∂t
)2
2(55)
i
∆Epot(x, t) =E ·∆V · ε2(x, t)
2=E ·∆V ·
(
∂u(x, t)∂x
)2
2. (56)
Postaramy się uzasadnić drugi związek. Rozważmy fragment ośrodka w kształcie walca opolu podstawy S i długości ∆x. Zakładamy, że fala sprężysta (53) rozchodzi się równolegledo jego osi. Wartość odkształcenia punktów należących do lewej podstawy wynosi u(x, t),
33Cytat pochodzi z książki: Ian Stewart, Czy Bóg gra w kości? Nowa matematyka chaosu, WydawnictwoNaukowe PWN, Warszawa 1994.34Tę zależność wyprowadzamy poniżej.35Z uwagi na to, że ∆V = S ·∆x i ∆x→ 0, funkcje v(x, t) oraz ε(x, t) na odcinku (x, x+∆x) nie zależą odzmiennej x.
21

a punktów do prawej u(x+∆x, t). Wypadkowe odkształcenie pola wychyleń na odcinku (x, x+
∆x) wynosi ∆u(x, t) = u(x + ∆x, t) − u(x, t) ≃ ∂u(x, t)∂x
∆x = ε(x, t) · ∆x. Z prawa Hooke’a(patrz równanie (41)) odkształcenie ε(x, t) jest związane z naprężeniem σ(x, t) zależnością
σ =F
S= Eε = E∆u
∆x. Zatem, wartość siły Fmax przyłożonej do całego fragmentu ośrodka
sprężystego poddanego odkształceniu ε wynosi Fmax(ε) = ESε.Obliczymy obecnie wartość pracy potrzebnej na to, aby rozpatrywany fragment ośrodka
odkształcić o ∆u. W tym celu wprowadzimy zmienną z o wymiarze odległości, która przyjmujewartości z przedziału 〈0,∆u〉. Następnie wyobraźmy sobie, że fragment objętości ∆V = S ·∆xrozciągamy w kierunku osi OX siłą zewnętrzną F (z) = E · S · z/∆x36. Pod jej działaniem,wyróżniony fragment wydłuża się o z metrów. Maksymalne wydłużenie z = ∆u i Fmax = F (z =∆u) = E ·S ·∆u/∆x. Policzymy obecnie wartość pracyW jaką wykonuje siła F (z) = E ·S ·z/∆x,w trakcie stopniowego odkształcania od z = 0 do z = ∆u fragmentu ośrodka o objętości ∆V 37
ośrodka. Jej wartość jest równa
W =∫ ∆u
0ES z∆xdz =
ES(∆u)22∆x
=12Eε2S ·∆x = 1
2Eε2∆V = 1
2ρ · c2ε2∆V, (57)
gdzie skorzystano z tego, że ε(x, t) = lim∆x→0∆u∆x=∂u(x, t)∂x
, c2 =Eρi ∆V = ∆x · S.
Pokazaliśmy w ten sposób słuszność wzoru (56).Policzymy obecnie odpowiednie pochodne
∂u
∂t= −Aω sin(ωt− kx+ α0)
∂u
∂x= kω sin(ωt− kx+ α0)
i podstawmy je do (54),(55),(56). W rezultacie otrzymujemy
∆Emech(x, t) =ρ ·∆V A22
(ω2 + k2c2) sin2(ωt− kx+ α0) == ρ ·∆V A2ω2 sin2(ωt− kx+ α0),
tj.∆Emech(x, t) = ρ ·∆V · v2(x, t). (58)
Zadanie 43. Wyprowadzić zależność (58).Wprowadzimy obecnie dodatkowe wielkości i pojęcia:średniej energii mechanicznej 〈∆Emech(x, t)〉 zgromadzonej w objętości ośrodka ∆V wokółpunktu x,
średniej mocy 〈∆W 〉 = d〈∆Emech(x, t)〉dt
,
chwilowej intensywności fali I oraz intensywności średniej 〈I〉,chwilowej gęstości ρE energii mechanicznej fali sprężystej,średniej gęstości 〈ρE〉 energii mechanicznej fali sprężystej.—————————————————————————————————-
Definicja średniej energii mechanicznej 〈∆Emech(x, t)〉Średnia energia mechaniczna 〈∆Emech(x, t)〉 jest równa
〈∆Emech(x, t)〉 :=1T
∫ T
0∆Emech(x, t)dt =
1T
∫ T
0[∆Ekin(x, t) + ∆Epot(x, t)]dt. (59)
36Dodajmy, że wartość siły F (z) (patrz rysunek) zmienia się liniowo na odcinku 〈0,∆u〉 od zera do mak-symalnej wartości równej Fmax(z = ∆u) = ES∆u/∆x powodującej całkowite odkształcenie ∆u wyróżnionegofragmentu, położonego pomiędzy x i (x+∆x).37Jak widzimy z ∈ 〈0,∆u〉.
22

—————————————————————————————————-
Ostatnią równość można zapisać w postaci
〈∆Emech(x, t)〉 =1T
∫ T
0∆Ekin(x, t)dt+
1T
∫ T
0∆Epot(x, t)dt =
= 〈∆Ekin(x, t)〉+ 〈∆Epot(x, t)〉. (60)
Ponieważ 〈∆Epot(x, t)〉 = 〈∆Ekin(x, t)〉 (patrz Dodatek II), więc〈∆Emech(x, t)〉 = 2〈∆Ekin(x, t)〉 = ∆E(max)kin (x, t)
(patrz Dodatek II), gdzie ∆E(max)kin (x, t) jest maksymalną wartością energii kinetycznej drgańcząsteczek ośrodka w objętości ∆V . Wartość ∆E(max)kin (x, t) jest łatwo obliczyć ponieważ
∆E(max)kin (x, t) =∆m
(
∂y
∂t
)2
max
2=12(ρS∆x)(ωvmax)2 =
12(ρS∆x)(ωA)2. (61)
Zatem
〈∆Emech(x, t)〉 =12(ρS∆x)(ωA)2. (62)
—————————————————————————————————-
Definicja średniej mocy 〈∆W 〉 fali sprężystejŚrednia moc 〈∆W 〉 jest równa
〈∆W 〉 := d〈∆Emech(x, t)〉dt
. (63)
—————————————————————————————————-
Po podstawieniu (62) otrzymujemy38
〈∆W 〉 = 12ρS · (ω · A)2 · lim
∆t→0
(∆x∆t
)
=12ρS · c(ω ·A)2, (64)
gdzie c =dx
dtjest prędkością fazową fali monochromatycznej.
Zauważmy, że moc 〈∆W 〉 określa ilość energii jaka jest transferowana pomiędzy fragmentamiośrodka sprężystego o rozmiarach ∆V = ∆x · S położonych pomiędzy punktami ośrodka xi x+∆x.Zadanie 44. Struna ma gęstość liniową masy ρl = 0, 03 kg/m i jest naciągnięta siłą N =
100, 0 N. Jaką moc musi wytwarzać źródło fali umieszczone na jednym końcu struny, abywygenerować w niej falę sinusoidalną o częstości f = 100 Hz i amplitudzie A = 0.01 m?
—————————————————————————————————-
Definicja chwilowej i średniej intensywności fali sprężystej
Chwilową intensywnością fali nazywamy wielkość
I(x, t)) :=∆WS⊥= ρ · c · (v(x, t))2. (65)
—————————————————————————————————-
Drugą równość w relacji (65) napisano po skorzystaniu z równania (58) i uwzględnieniutego, że ∆V = S⊥∆x.
—————————————————————————————————-38Wielkość ∆W określana jest również mianem strumienia energii fali sprężystej.
23

Średnią intensywnością fali39 〈I〉 nazywamy wielkość
〈I〉 := 〈∆W 〉S⊥
=12ρ · c · (ω · A)2. (66)
—————————————————————————————————-
Zadanie 45. Jakie są wymiary I(x, t) i 〈I〉?
—————————————————————————————————-
Definicja chwilowej gęstości energii fali sprężystej
Gęstością chwilową ρE(x, t) energii mechanicznej fali sprężystej nazywamy wielkość
ρE(x, t) = lim∆→0
∆Emech(x, t)∆V
= ρ · A2ω2 sin2(ωt− kx+ α0) = ρ · v2(x, t). (67)
—————————————————————————————————-
Definicja średniej wartości gęstości energii mechanicznej fali sprężystej
Średnią wartością gęstości energii mechanicznej fali sprężystej 〈ρE〉 nazywamywielkość
〈ρE〉 :=1T
∫ T
0ρEdt =
1T
∫ T
0ρ ·A2ω2 sin2(ωt− kx+ α0) =
12ρ · A2ω2 = ρ〈v2(x, t)〉.(68)
—————————————————————————————————-
W powyższym wyrażeniu wykorzystano związek 〈sin2(ωt− kx+ α0)〉 =12.
—————————————————————————————————-Uzasadnienie ostatniego związku. Ponieważ sin2(x) =
1− cos(2x)2
, to
〈sin2(ωt− kx+ α0)〉 =1T
∫ T
0
1− cos[2(ωt− kx+ α0)]2
dt =
=12− 1T
∫ T
0
cos[2(ωt− kx+ α0)]2
dt =12,
gdyż ostatnia całka jest całką po obszarze równym podwojonemu okresowi funkcji podcałkowej i dla-tego jest równa zeru.Bezpośrednie obliczenie tej całki polega, jak łatwo zauważyć, na policzeniu
∫ T0 cos[2(2πt/T+β0)]dt,
gdzie β0 = −kx + α0. Wartość tej całki jest proporcjonalna dosin[2(2πt/T + β0)]|T0 = sin(4π + β0)− sin(β0) = 0,
tj. do całki z funkcji okresowej po przedziale, którego długość jest równa jej okresowi.————————————————————————Zauważmy, że intensywność chwilowa I(x, t) jest związana z chwilową wartością gęstości
energii zależnościąI(x, t) = ρE(x, t) · c, (69)
ponieważ, jak wynika z wzoru (65), I(x, t) = ρ · v2(x, t) · c co z uwagi na (67) prowadzi dorelacji (69).Intensywność 〈I〉 określa szybkość z jaką energia fali sprężystej jest transportowana przez
jednostkową powierzchnię ustawioną prostopadle do kierunku rozchodzenia się fali. Innymisłowy 〈I〉 określa ilość energii transmitowanej w jednostce czasu przez jednostkową powierzchnięustawioną prostopadle do kierunku rozchodzenia się fali.Jak widzimy ρE(x, t) oraz I(x, t) zależą od miejsca i czasu, natomiast 〈∆Emech〉, 〈∆W 〉, 〈I〉
oraz 〈ρE〉 nie są funkcjami tych zmiennych.39Wielkość 〈I〉 określana jest również mianem gęstości strumienia energii fali sprężystej.
24

Tak więc ośrodek sprężysty, w którym rozchodzi się fala posiada dodatkową ilość energii,której średnia gęstość 〈ρE〉 (patrz (68)) jest proporcjonalna do gęstości ośrodka ρ, kwadratuω2 częstości oraz kwadratu A2 amplitudy. Ta ilość energii jest przekazywana przez falę różnympunktom ośrodka sprężystego. Ponadto, z relacji (66) wynika, że w ośrodku sprężystym jesttransportowana energia pomiędzy punktami tego ośrodka. Ilość energii przekazywanej okre-śla intensywność 〈I〉, która jest proporcjonalna do 〈ρE〉 i prędkości fali c. I to stanowi sensstwierdzenia, że z falą sprężystą związane jest przenoszenie energii mechanicznej.Wyprowadzony tutaj, dla podłużnej fali płaskiej monochromatycznej, związek (68) jest
słuszny także dla innych fal (np. poprzecznych, sferycznych, tłumionych).
5.1. Dodatek II
W tym dodatku uzasadnimy zależności 〈∆Ekin(x, t)〉 = 〈∆Epot(x, t)〉 oraz 〈∆Ekin(x, t)〉 =〈∆Ekin(x, t)(max)〉 w nieco prostrzy sposób. Skorzystaliśmy z nich wyprowadzając związki (61)i (62).Ponieważ każdy z fragmentów ośrodka sprężystego, do którego dociera fala monochro-
matyczna (53) wykonuje drgania harmoniczne proste, to średnia wartość energii kinetycznej〈∆Ekin〉 = 〈∆Epot〉. Ten związek jest spełniony np. dla układu zawierającego masę m podwie-szoną do sprężyny o współczynniku sprężystości k i wykonującej drgania harmoniczne prosteopisywane równaniem
y(t) = y0 cos(ωt).
Zadanie 46. Pokazać, że w ruchu harmonicznym prostym, jaki wykonuje ciało o masie mpodwieszone do sprężyny o współczynniku sprężystości k, spełnione są relacje
〈Ekin〉 =1T
∫ T
0[m(dy/dt)2/2]dt = 〈Epot〉 =
1T
∫ T
0[ky2/2]dt =
14ky20.
Energia całkowita Emech takiego układu jest stała (tj. nie zależy od czasu) i wynosi 〈Emech〉 =〈Ekin〉 + 〈Epot〉 = 2〈Ekin〉 = 2〈Epot〉 = E(max)kin = E(max)pot = ky20/2. Jak widzimy 〈Emech〉 =E(max)kin = E(max)pot = ky20/2.Wykorzystamy te związki do uzasadnienia wzorów stosowanych w poprzednim podrozdziale.
Energia mechaniczna fali zgromadzona we fragmencie ∆V jest równa 〈∆Emech〉 = ∆E(max)kin ,gdzie ∆E(max)kin jest maksymalną energią kinetyczną fragmentu ∆V . Ta maksymalna wartośćwynosi
∆E(max)mech =12∆m(∂y/∂t)2max =
12∆x · S · ρ(ωA)2,
co jest równaniem (62).Zadanie 47. Naciągnięty sznurek ma masę m = 0.20 kg i długość L = 4 m. Jaką moc należy
dostarczać sznurkowi aby propagowała się w nim sinusoidalna fala o amplitudzie A = 0, 08 m,długości fali λ = 0.6 m i prędkości v = 40 m/s?
5.2. Przechodzenie fal sprężystych przez granicę ośrodków
Podczas przechodzenia fal sprężystych przez granicę dwóch różnych ośrodków sprężystychna ich granicy obserwujemy zjawiska odbicia i transmisji (tj. przechodzenia przez granicę) falsprężystych.Dla światła przechodzącego przez granicę ośrodków spełnione jest prawo odbicia (prawo
Snelliusa)sin(Θ1)sin(Θ2)
=c1c2, (70)
gdzie Θ1 jest kątem padania, Θ2 kątem załamania, c1 prędkością światła w pierwszym ośrodku(z niego światło wychodzi), c2 prędkością światła w drugim ośrodku (do niego światło wchodzi).
25

Ponadto, kąt odbicia jest równy kątowi padania Θ′ = Θ1.Oba prawa (załamania i odbicia) są prostą konsekwencją zasady Fermaty, zgodnie z którą
światło rozchodzi się pomiędzy dwoma punktami A i B po takiej drodze, aby czas ruchu światła
tA→B =∫ B
A
dl
c= minimum. (71)
Problem. Wyprowadzić prawa odbicie i załamania z zasady Fermata (71).Rozpatrzymy obecnie zależności energetyczne dla fali poprzecznej biegnącej w strunie zbu-
dowanej z dwóch różnych materiałów.W tym celu wprowadzimy najpierw pojęcie oporu falowego Z struny, który definiujemy
w następujący sposób:
Z =Siła poprzecznaPoprzeczna prędkość
=F⊥v⊥. (72)
Symbole ⊥ zostały użyte dla podkreślenia poprzecznego charakteru ruch fali poprzecznej.Każdy ośrodek sprężysty, w którym rozchodzi się fala charakteryzuje określony opór fa-
lowy Z (patrz formuła (72)), który jest miarą oporów jakie stawia ośrodek biegnącej w nimfali sprężystej. W rozpatrywanym przypadku jest to stosunek wartości siły prostopadłej, jakąnależy przyłożyć do struny, aby wprowadzić jej fragment w ruch, którego miarą jest pręd-kość v⊥ cząsteczek struny w kierunku także prostopadłym do struny. Ponadto, jeśli w ośrodkunie występują straty energii, to Z jest liczbą rzeczywistą.
Zauważmy, że wymiarem Z jestkgs.
Wyznaczymy obecnie Z dla struny. W tym celu rozpatrzymy biegnącą w strunie falę po-przeczną, której źródło znajduje się na lewym końcu struny. Siła harmoniczna poprzecznaw stosunku do struny przyłożona do jej lewego końca jest zależna od czasu i ma postaćF⊥(t) = F0 exp(iωt) (patrz rysunek). Poprzeczna siła zewnętrzna jest równoważona przez skła-dową pionową siły naciągu N , tj.
F0 exp(iωt) = −N sin(Θ) ≃ −N tan(Θ) = −N∂y
∂x,
gdzie założono, że Θ jest małym kątem. Dla fali biegnącej y(x, t) = A exp[i(ωt−kx)]. W lewymkońcu struny x = 0 i
(
∂y
∂x
)
x=0= i · k ·N · A exp[i(ωt− kx)]x=0.
Z tej równości wynika, że
F0 exp iωt = ikNA exp iωt → A =F0ikN=F0iω
c
Ni
y(x, t) =F0iω
c
Nexp[i(ωt− kx)],
gdzie wykorzystano związek c = ω/k.Prędkość poprzeczna
v⊥ =∂y
∂t= F0
c
Nexp[i(ω · t− k · x)].
Zatem wartość Z⊥ wynosi
Z⊥ =F0 exp(iωt)v⊥(t, x = 0)
=F0 exp(iωt)
F0c
Nexp[i(ω · t− k · 0)]
=N
c= c · ρ0, (73)
bo N = ρ0 · c2.Obecnie zajmiemy się odbiciem i przechodzeniem fali przez granicę ośrodków. W tym celu
wyobraźmy sobie strunę złożoną z dwóch różnych ośrodków o oporach falowych Z1 = ρ1v1 orazZ2 = ρ2v2 połączonych ze sobą na stałe. Zakładamy, że naciąg N jest taki sam w obu częściachstruny. Prędkość fali poprzecznej w jednej części struny v21 = N/ρ1, a w drugiej v
22 = N/ρ2.
26

Zauważmy, że z równości naciągu wynika związek
v21ρ1 = v22ρ2.
Niecahj fala padającą na granicę ośrodków ma postać
yi(x, t) = Ai exp[i(ωt− k1x)],fala odbita od granicy ośrodków (propaguje się ona w ujemnym kierunku osi OX) będzie postaci
yr(x, t) = Br exp[i(ωt+ k1x)],
zaś fala (transmitowaną), która przeszła przez granicę ośrodków przyjmujemy w postaci
yt(x, t) = At exp[i(ωt− k2x)].Spróbujemy wyznaczyć amplitudowe współczynniki, które definiujemy w następujący spo-
sób:Amplitudowym współczynnik transmisji nazywamy wielkość
AtAi.
Amplitudowym współczynnik odbicia nazywamy wielkośćBrAi.
W celu ich wyznaczenia posłużymy się warunkami, które fala powinna spełniać na granicyośrodków.
1. Warunek geometryczny: w dowolnej chwili czasu wychylenia po lewej i prawej stroniegranicy powinny być równe. Jeśli początek układu umieścimy na granicy ośrodków, tomatematycznym wyrazem warunku geometrycznego jest związek
yt = yi + yr, (74)
innymi słowy, wychylenie jest ciągłą funkcją zmiennej x. Z tego równania wynika (dla x =0)
Ai +Br = At (75)
2. Warunek dynamiczny: Poprzeczna siła N sin(Θ) ≃ N tan(Θ) ≃ N ∂y∂xjest ciągła w punk-
cie x = 040. Matematycznym wyrazem warunku dynamicznego dla x = 0 jest równość:
N
(
∂(yi + yr)∂x
)
x=0
= N(
∂yt∂t
)
x=0, (76)
z którego wynika, że
−Nk1Ai +Nk1Br = −Nk2At.Z uwagi na to, że N = v21ρ1 = v
22ρ2 oraz ω = k1v1 = k2v2, otrzymujemy
−N ωv1Ai +N
ω
v1Br = −N
ω
v2At
oraz
Z1(Ai − Br) = Z2At. (77)
Powyższe równania (tj. wyrażenia (75) i (77)) zapisujemy jako układ równań{
Ai +Br = AtZ1(Ai − Br) = Z2At , (78)
którego rozwiązaniem jest:— amplitudowy współczynnik odbicia
BrAi=Z1 − Z2Z1 + Z2
(79)
i40Gdyby ten warunek nie był spełniony, to skończona wartość siły przyłożona do nieskończenie małej masyspowodowałaby nieskończone jego przyspieszenie czego nie obserwujemy.
27

— amplitudowy współczynnik transmisjiAtAi=2Z1Z1 + Z2
(80)
Jak widzimy oba wyznaczone współczynniki nie zależa od częstości ω fali sprężystej i sąfunkcjami jedynie oporów falowych ośrodków.Wartość Z2 =∞ oznacza, że struna jest zamocowana na stałe w punkcie x = 0 (punkty po
prawej stronie x = 0 nie wykonują drgań). Wtedy, Br/Ai = −1.0 i At/Ai = 0. Fala padającajest całkowicie odbijana, a jej faza zmienia się o π, tj.
yr(x, t) = −A1 exp[i(ωt+ kx)] = A1 exp[i(ωt+ kx− π)].Jeśli Z2 = 0, co oznacza, że punkt x = 0 struna są swobodne. Wtedy, Br/Ai = 1.0
i At/Ai = 2. To tłumaczy efekt klaśnięcia bata.Współczynnik odbicie i transmisja energii otrzymamy odwołując się do wyrażen określają-
cych energię przenoszoną przez falę. wiemy, że ilość energii ∆Emech fali sprężystej zgromadzonana długości ∆l struny o masie ∆m = ρl ·∆l jest równa
∆Emech =12ρl ·∆l · ω2 ·A2. (81)
Jednostką tak określonej energii jest dżul. Gęstość liniowa tej energii
ρl(E) =∆Emech∆l
==12ρl · ω2 · A2
Dodajmy, że jednostką ρl(E) jest dżul/m.Policzymy obecnie ile energii jest transportowanych przez dany punkt struny w czasie ∆t.
Prędkość fali wynosi c. Przez dany punkt, o współrzędnej x, transportowana jest w czasie ∆tenergia mechaniczna zawarta na długości struny ∆t ·c na lewo od tego punktu41, której wartośćwynosi
∆E = ρl(E) ·∆t · c.Tak więc w jednostce czasu przez dany punkt struny transportowana jest ilość energii równa
W = ∆E/∆t = ρl(E) · c =12ρl · c · ω2 · A2 =
12Zω2A2.
Jak łatwo sprawdzić jednostką W jest dżul/s=wat, a więc W jest mocą fali sprężystej.Zastosujemy otrzymany związek do granicy ośrodków w naszej strunie. Ponieważ moc do-
cierająca do granicy ośrodków musi być równa mocy energii odpływającej więc12Z1ω
2B2r +12Z2ω
2A2t =12Z1ω
2A2i . (82)
Wprowadzimy kolejne wielkości.Współczynnikiem odbicia R energii fali sprężystej na granicy ośrodków nazy-
wamy wielkość
R = Moc energii odbitejMoc energii padającej
. (83)
Współczynnikiem transmisji N energii fali sprężystej na granicy ośrodków na-zywamy wielkość
N = Moc energii transmitowanejMoc energii padającej
. (84)
W oparciu o przeprowadzone wcześniej rozważania otrzymujemy
R = Z1B2r
Z1A21=(
BrA1
)2
=(
Z1 − Z2Z1 + Z2
)2
i
N = Z2A2t
Z1A21=4Z1Z2(Z1 + Z2)2
.
41Zakładamy, że fala biegnie w dodatnim kierunku osi OX.
28
Jak widzimy, odbicie od granicy ośrodków nie wystąpi, jeśli Z1 = Z2.Zadanie 62. Korzystając z relacji (82) pokazać, że T +R = 1.Czy można tak połączyć dwie różne struny o oporach falowych Z1 = ρ1V1 i Z3 = ρ3V3
za pomocą trzeciej struny o długości l2 i oporze falowym Z2 = ρ2V2 w taki sposób aby falaprzechodziła z pierwszego do trzeciego ośrodka bez odbicia? Jest to możliwe pod warunkiem,
że Z2 =√Z1Z3 i l2 =
λ24.
Podobne rozważania można przeprowadzić w przypadku fali akustycznej padającej podkątem α na granicę ośrodków. Wtedy część fali odbija się od granicy ośrodków, a część załamujesię pod kątem β. Jak pokazują szczegółowe rachunki
R =(
Z1 cos(β)− Z2 cos(α)Z1 cos(β) + Z2 cos(α)
)2
(85)
i
N = 4Z1Z2 cos(α) cos(β)(Z1 cos(β) + Z2 cos(α))2
. (86)
Jak widzimy, odbicie od granicy ośrodków nie wystąpi, jeśli Z1 cos(β) = Z2 cos(α).Zadanie 63. Korzystając z relacji (85) i (86) pokazać, że T +R = 1 także dla fali akustycznej
padającej pod kątem α na granicę ośrodków sprężystych.
Będę się starał wykazać, że najważniejszą cechą, jakiej możnaoczekiwać u dobrze prosperującego genu, jest bezwględny ego-
izm. Egoizm genu prowadzi na ogół do egoizmu w zachowa-niach osobniczych.
Richard Dawkins42
6. Fale akustyczne
Fale akustyczne to podłużne fale sprężyste. Są jednym z najczęściej spotykanych fal (opróczświatła) w życiu codziennym człowieka. Rozchodzą się w każdym materialnym ośrodku sprę-żystym. Ich prędkość zależy od własności sprężystych ośrodka. Podczas propagowania sięw ośrodku wprawiają w ruch drgający cząsteczki ośrodka. Przejawia się to jako powstanielokalnych zmian gęstości i ciśnienia ośrodka wzdłuż kierunku ruchu fali. Zmiany te tworzą ciąglokalnych obszarów zgęszczenia i rozrzedzenia ośrodka sprężystego. Jeśli w ośrodku rozchodzisię kosinu– lub sinusosidalna fala płaska, to cząstki ośrodka wykonują ruch prosty harmoniczny.Oznacza to, że ciśnienie zmienia się także kosinu- lub sinusoidalnie.Fale akustyczne dzielimy, w zależności od ich częstości, na:
1. Infradźwięki – to fale akustyczne o częstościach 0〈f ≤ 20 Hz.2. Fale dźwiękowe (dźwięk) – to fale akustyczne o częstościach 20 ≤ f ≤ 20 kHz.3. Ultradźwięki – to fale akustyczne o częstościach większych od 20 kHz.
Infra– i ultradźwięki nie są słyszalne przez ucho przeciętnego człowieka43.Zajmiemy się obecnie prędkością rozchodzenia się fali akustycznej w powietrzu (ogólniej
w gazie) i wyprowadzimy klasyczny wynik, zwany wzorem Laplace’a, który określa prędkość falgłosowych w powietrzu.
42Cytat pochodzi z książki: Richard Dawkins, Samolubny gen, Wydawnictwo Prószyński i S–ka, Warszawa1996.43Historia zna przykłady ludzi, którzy odbierali (i odbierają) ultradźwięki.
29

6.1. Wzór Laplace’a
Rozprzestrzenianie się fal dźwiękowej w powietrzu to nic innego jak propagowanie się w tymośrodku lokalnych zgęszczeń i rozrzedzeń powietrza. Rozchodząca się fala powoduje lokalnezmiany ciśnienia p(x, t) powietrza, którego wartość wynosi
p(r, t) = pr +∆p(r, t), (87)
gdzie pr – ciśnienie równowagowe (nie zależy od miejsca i czasu ), a ∆p(r, t) – dodatkoweciśnienie pochodzące od fali głosowej.W celu wyznaczenia wartości prędkości fali głosowej w powietrzu postąpimy podobnie jak
w przypadku obliczania prędkości fali sprężystej rozchodzącej się w pręcie.Weźmy pod uwagę objętość ∆V powietrza zajmowaną przez walec o powierzchni podstawy S
i długości ∆x, którego lewa podstawa jest umieszczona w x, a prawa podstawa w x+∆x. Niechajfala głosowa rozchodzi się wzdłuż osi walca. Równanie ruchu masy powietrza wewnątrz walcama postać
ρ0 · S ·∆x∂2u
∂t2= S · [p(x, t)− p(x+∆x, t)], (88)
gdzie ρ0 jest średnią (równowagową) gęstością powietrza, zaś u(x, t) jest przesunięciem cząstekpowietrza wypełniających walec znajdujący się wokół punktu x ośrodka.Zadanie 48. Wyjaśnić sens fizyczny związku (88).Dla dostatecznie małych wartości ∆x możemy napisać
ρ · S∂2u
∂t2= −S · lim
∆x→0
(
p(x+∆x)− p(x)∆x
)
= −S ∂p∂x, (89)
Jak policzyć pochodną∂p
∂x? Musimy najpierw zdać sobie sprawę z tego, że prędkość fali głosowej
jest na tyle duża, że docierając do określonego miejsca powietrza nie powoduje ona wymianyciepła między danym fragmentem ośrodka, a przylegającymi do niego innymi częściami ośrodka.Dlatego mówimy, że propagacja dźwięku jest procesem adiabatycznym.Przypominujmy, że równanie adiabaty ma postać
p · V κ = const, (90)
gdzie V = S ·∆x. Policzmy różniczką zupełną równania adiabaty (90)∆p · V κ + κ · V κ−1 · p ·∆V = 0, (91)
skąd otrzymujemy
∆p = −κ · p∆VV. (92)
Następnie zauważmy, że objętość równowagowa naszego fragmentu objętości V = S · ∆x,natomiast ∆V = S · ∆u, ponieważ fala powoduje zmianą liniowych rozmiarów objętości Vo wartość ∆u = u(x+∆x, t)− u(x, t). Zatem
∆p = −κ · p∆u∆x
(93)
i dla nieskończenie małych przyrostów możemy napisać
∂p = −κ · p∂u∂x. (94)
Po podstawieniu ostatniego wyniku do (89) otrzymujemy
∂2u
∂x2=1ρ
∂(
κ · p∂u∂x
)
∂x=κ · pρ
∂2u
∂t2=1(c(||))2
∂2u
∂t2. (95)
Zatem prędkość fali głosowej w atmosferze jest dana wyrażeniem zwanym wzorem Laplace’a
c(||) =
√
κ · Pρ=
√
Epowρ, (96)
30
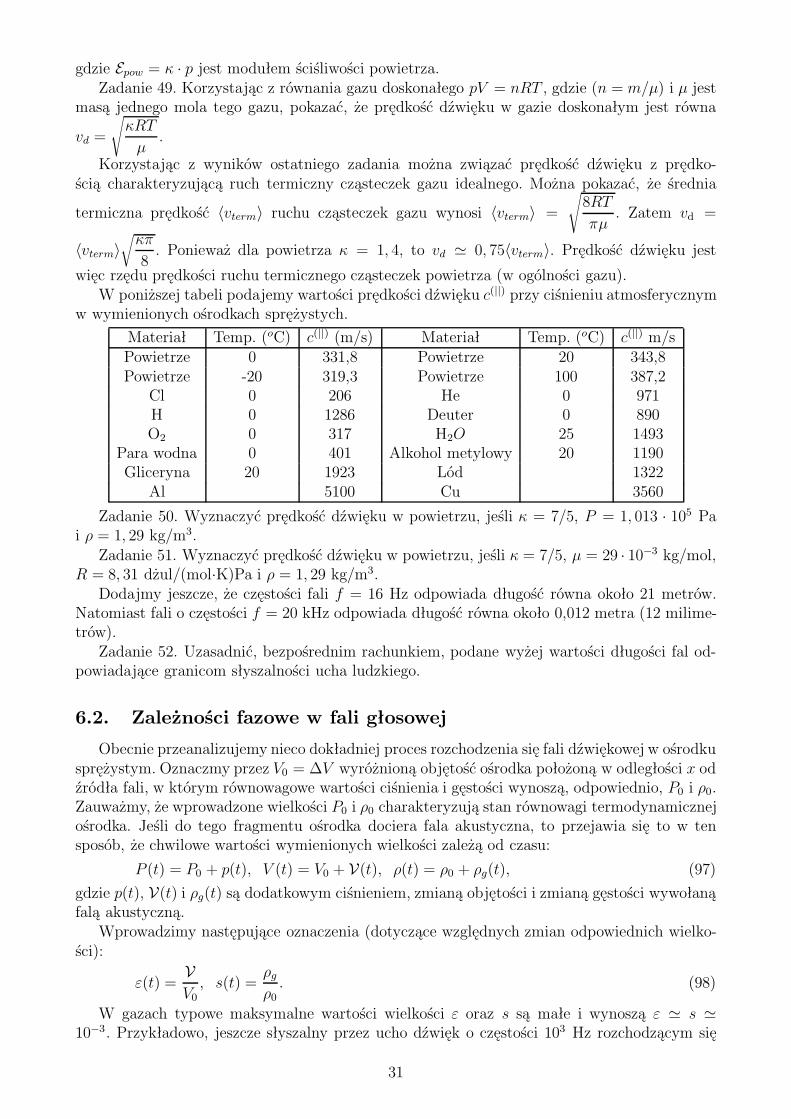
gdzie Epow = κ · p jest modułem ściśliwości powietrza.Zadanie 49. Korzystając z równania gazu doskonałego pV = nRT , gdzie (n = m/µ) i µ jest
masą jednego mola tego gazu, pokazać, że prędkość dźwięku w gazie doskonałym jest równa
vd =
√
κRT
µ.
Korzystając z wyników ostatniego zadania można związać prędkość dźwięku z prędko-ścią charakteryzującą ruch termiczny cząsteczek gazu idealnego. Można pokazać, że średnia
termiczna prędkość 〈vterm〉 ruchu cząsteczek gazu wynosi 〈vterm〉 =√
8RTπµ. Zatem vd =
〈vterm〉√
κπ
8. Ponieważ dla powietrza κ = 1, 4, to vd ≃ 0, 75〈vterm〉. Prędkość dźwięku jest
więc rzędu prędkości ruchu termicznego cząsteczek powietrza (w ogólności gazu).W poniższej tabeli podajemy wartości prędkości dźwięku c(||) przy ciśnieniu atmosferycznym
w wymienionych ośrodkach sprężystych.
Materiał Temp. (oC) c(||) (m/s) Materiał Temp. (oC) c(||) m/sPowietrze 0 331,8 Powietrze 20 343,8Powietrze -20 319,3 Powietrze 100 387,2Cl 0 206 He 0 971H 0 1286 Deuter 0 890O2 0 317 H2O 25 1493
Para wodna 0 401 Alkohol metylowy 20 1190Gliceryna 20 1923 Lód 1322Al 5100 Cu 3560
Zadanie 50. Wyznaczyć prędkość dźwięku w powietrzu, jeśli κ = 7/5, P = 1, 013 · 105 Pai ρ = 1, 29 kg/m3.Zadanie 51. Wyznaczyć prędkość dźwięku w powietrzu, jeśli κ = 7/5, µ = 29 · 10−3 kg/mol,
R = 8, 31 dżul/(mol·K)Pa i ρ = 1, 29 kg/m3.Dodajmy jeszcze, że częstości fali f = 16 Hz odpowiada długość równa około 21 metrów.
Natomiast fali o częstości f = 20 kHz odpowiada długość równa około 0,012 metra (12 milime-trów).Zadanie 52. Uzasadnić, bezpośrednim rachunkiem, podane wyżej wartości długości fal od-
powiadające granicom słyszalności ucha ludzkiego.
6.2. Zależności fazowe w fali głosowej
Obecnie przeanalizujemy nieco dokładniej proces rozchodzenia się fali dźwiękowej w ośrodkusprężystym. Oznaczmy przez V0 = ∆V wyróżnioną objętość ośrodka położoną w odległości x odźródła fali, w którym równowagowe wartości ciśnienia i gęstości wynoszą, odpowiednio, P0 i ρ0.Zauważmy, że wprowadzone wielkości P0 i ρ0 charakteryzują stan równowagi termodynamicznejośrodka. Jeśli do tego fragmentu ośrodka dociera fala akustyczna, to przejawia się to w tensposób, że chwilowe wartości wymienionych wielkości zależą od czasu:
P (t) = P0 + p(t), V (t) = V0 + V(t), ρ(t) = ρ0 + ρg(t), (97)
gdzie p(t), V(t) i ρg(t) są dodatkowym ciśnieniem, zmianą objętości i zmianą gęstości wywołanąfalą akustyczną.Wprowadzimy następujące oznaczenia (dotyczące względnych zmian odpowiednich wielko-
ści):
ε(t) =VV0, s(t) =
ρgρ0. (98)
W gazach typowe maksymalne wartości wielkości ε oraz s są małe i wynoszą ε ≃ s ≃10−3. Przykładowo, jeszcze słyszalny przez ucho dźwięk o częstości 103 Hz rozchodzącym się
31

w powietrzu (w warunkach normalnych) powoduje zmiany lokalne ciśnienia p, którego wartośćjest rzędu 10−5 Pa, co stanowi 10−10 ciśnienia atmosferycznego.Pokażemy teraz, że ε ≃ −s. W tym celu zauważmy, że podczas rozchodzenia się fali masa
ośrodka w objętości V nie zmienia się. Zatemρ0V0 = ρ(t)V (t) = ρ0(1 + s) · V0(1 + ε) = ρ0V0(1 + s + ε+ s2ε2) ≃ ρ0V0(1 + s + ε),
skąd wynika, żeε ≃ −s. (99)
Własności sprężyste ośrodka, jak wiemy, charakteryzujemy za pomocą modułu ściśliwości
K = zmiana ciśnieniawzględna zmiana objętości
,
którego wartość wynosi
K = − ∆p∆VV
. (100)
W rozpatrywanym przypadku
K = −p(x, t)ε(x, t)
= κP. (101)
Warto podkreślić, że K zależy od typu procesu termodynamicznego, któremu podlega po-wietrze podczas przechodzenia przezeń fali dźwiękowej. Procesy te powinny być odwracalnymi,ponieważ tylko wtedy nie zachodzi pochłanianie energii fali sprężystej przez ośrodek. Ozna-cza to, że w trakcie propagacji fali możemy zaniedbać dyfuzję, lepkość i przewodnictwo cieplneośrodka sprężystego. Jeśli więc procesy prowadzące do wzrostu entropii nie występują, to procestermodynamiczny, któremu podlega każdy fragment ośrodka do którego dociera fala akustycznamoże być traktowany jako proces adiabatyczny. Wtedy K jest adiabatycznym modułem ściśli-wości, którego wartość wyznaczyliśmy poprzednio (patrz poprzedni podrozdział).Fala akustyczna wprowadza do ośrodka małe zaburzenia, ponieważ |ε| ≪ 1 i |s| ≪ 1.
Zatem procesy termodynamiczne związane z rozchodzeniem się fali akustycznej są odwracalneco między innymi oznacza, że nie zachodzi pochłanianie energii fali akustycznej.W przypadku dużych zaburzeń stanu równowagi ośrodka sytuacja wygląda inaczej. Z uwagi
na duże wartości |ε| i |s| w gazie tworzą się lokalne obszary o podwyższonej temperaturze (tam,gdzie ciśnienie w ośrodku jest duże) co powoduje odpływ energii z wyróżnionego fragmentuośrodka. Wówczas mamy do czynienia z przewodnictwem cieplnym. Ponadto, mogą powstawaćlokalne gradienty prędkości (w obszarach, gdzie prędkość cząsteczek ośrodka różni się znacznie).To z kolei prowadzi do dyfuzji i strat energii z uwagi na lepkość (tarcie wewnętrzne pomiędzycząsteczkami ośrodka; patrz podrozdział poświęcony falom nieliniowym, gdzie omawiamy faleuderzeniowe). My ograniczamy nasze rozważania do przypadków, gdy |ε| ≪ 1 i |s| ≪ 1.Zadanie 53. Fala akustyczna biegnąca przez powietrze powoduje na swej drodze lokalne
zmiany ciśnienia akustycznego dane wyrażeniem p(x, t) = 1, 27Pa sin π(x − 340t) (w jed-nostkach SI). Wyznaczyć: (a) amplitudę ciśnienia akustycznego, (b) częstość (c) długość (d)prędkość tej fali w powietrzu.Oznaczmy przez
u(x, t) = u0 exp[i(ωt− kx)] (102)równanie fali akustycznej biegnącej w dodatnim kierunku osi OX.Wtedy1. Prędkość podłużna cząstek ośrodka
ut(x, t) =∂u
∂t= iωu(x, t).
Prędkość tę możemy zapisać w postaci
ut(x, t) = ωu0 exp[i(ωt− kx+ π/2)],
32

gdzie wykorzystano wzór Eulera (27).
2. Odkształcenie względne
ε =∂u
∂x=VV= −iku(x, t) = ku0 exp[i(ωt− kx− π/2)].
3. Względna zmiana gęstości ośrodka sprężystego
s =ρdρ= −ε = iku(x, t) = ku0 exp[i(ωt− kx+ π/2)],
gdzie skorzystano z relacji (99).
4. Dodatkowe ciśnienie, zwane jest ciśnieniem akustycznym, jest równe
p(x, t) = −Kε = Ks = Kk exp[i(ωt− kx+ π/2)],gdzie skorzystano z wyrażenia (101).
Z otrzymanych wyników możemy wyciągnąć następujące wnioski. Podczas rozchodzenia sięfali dźwiękowej w ośrodku:
Prędkość cząsteczek ośrodka ut(x, t), względna zmiana gęstości s(x, t) = ρd/ρ oraz ciśnie-nie akustyczne p(x, t) wyprzedzają w fazie o π/2 wychylenia u(x, t) cząsteczek ośrodka.
Pochodna∂u
∂xoraz względna zmiana objętości ε(x, t) są opóźnione w fazie o π/2 względem
u(x, t). Ilustruje to odpowiedni rysunek.
Jak widzimy, w przypadku fali biegnącej w dodatnim kierunku osi OX, wartości u = 0 przymaksymalnej dodatniej wartości prędkości ut odpowiada dodatnia maksymalna wartość p =pmax, P = P0 + pmax ciśnienia akustycznego (ściskanie) oraz maksymalne gęstość s = smax, ρ =ρ0(1 + smax) i minimalna wartość objętości ε = −εmax, V = V0(1− εmax).Zadanie 54. Pokazać, że w przypadku fali akustycznej u(x, t) = u0 exp[i(ωt+kx)] rozchodzą-
cej się w ujemnym kierunku osi OX spełnione są relacje: ut = ∂u/∂t = ω exp[i(ωt+ kx+ π/2)],ε(x, t) = ∂u/∂x = k exp[i(ωt+ kx + π/2)] = −s, p(x, t) = Ks(x, t) = K exp[i(ωt+ kx − π/2)].Sporządzić odpowiednie wykresy.W przypadku fali biegnącej w ujemnym kierunku osi OX, wartości u = 0 przy maksymalnej
dodatniej wartości prędkości ut odpowiada ujemna maksymalna wartość p = −pmax, P = P0 −pmax dodatkowego ciśnienia (rozrzedzenie) oraz minimalna gęstość s = smax, ρ = ρ0(1 − smax)i maksymalna wartość objętości ε = εmax, V = V0(1 + εmax).Zajmiemy się jeszcze zjawiskiem transportowania energii przez falę akustyczną postaci44
u(x, t) = u0 cos(ωt− kx).W elemencie ∆V = S∆x ośrodka sprężystego (w którym rozchodzi się fala akustyczna)
zgromadzona jest energia kinetyczna w ilości (patrz formuła (55))
∆Ekin(x, t) =12ρ0S∆x
(
∂u
∂t
)2
=12ρ0S∆xu2t
Średnia wartość tej energii (patrz równiez wzory (59) i (60))
〈∆Ekin(x, t)〉 =1T
∫ T
0
12ρ0S∆xu2tdt,
która z uwagi na
ut = −ωu0 sin(ωt− kx)wynosi
〈∆Ekin(x, t)〉 =1T
∫ T
0
12ρ0S∆x[−ωu0 sin(ωt− kx)]2dt.
44Jest to część rzeczywista wzoru (102).
33

Ponieważ średnia wartość funkcji [sin2(ωt− kx)] po podanym przedziale jest równa 1/2 (patrzuzasadnienie zawarte poniżej wzoru (68)), to
〈∆Ekin(x, t)〉 =14ρ0S∆xω2u20 =
14ρ0 · S ·∆x · (u(max)t )2, (103)
gdzie
u(max)t = ω · u0
jest maksymalmą wartością prędkości ut cząsteczek ośrodka.Ilość energii potencjalnej zgromadzonej w objętości ∆V = S ·∆x jest dana wyrażeniem
∆Epot(x) = −∫
pdV.
Zgęszczenie ośrodka wyraża się wzorem
s =∫
dV
V0=VV0,
gdzie∫
dV = V jest małą zmianą wartości objętości fragmentu ośrodka o objętości V0 = ∆V =S∆x. Zatem
dV = −V0ds,co po uwzględnieniu związku
p = Ksdaje
∆Epot(x) = −∫
pdV =∫ s
0Ks′V0ds′ =
12Ks2S∆x = 1
2Kε2S∆x,
gdzie zastosowano relację ε = −s. Skorzystajmy również z tego, żeε =∂u
∂x= ku0 sin(ωt− kx).
Wtedy chwilowa wartość energii potencjalnej
∆Epot(x, t) =12·K· [ku0 sin(ωt−kx)]2 ·S ·∆x =
12·K·k2 ·∆x ·S ·u20· [sin(ωt−kx)]2.(104)
Stąd możeny policzyć średnią ilość energii potencjalnej zgromadzonej w objętości V0 = S∆x
〈∆Epot(x)〉 =1T
∫ T
0
12· S ·∆x · K · (k · u0)2 · [sin(ωt− kx)]2dt.
Ponieważ średnia wartość funkcji [sin2(ωt− kx)] po podanym przedziale jest równa 1/2, to
〈∆Epot(x)〉 =14S∆xKk2u20.
Ostatecznie, z uwagi na związek
c2 =ω2
k2=Kρ0,
tj. k2K = ρ0ω2 otrzymujemy〈∆Epot(x)〉 =
14ρ0 · S ·∆x · ω2 · u20 =
14ρ0 · S ·∆x · (u(max)t )2 (105)
Jak widzimy średnie energie dane formułami (103) oraz (105) są sobie równe.Ponadto, w objętości ∆V ośrodka sprężystego jest zgromadzona średnia wartość energii
mechanicznej równa
〈∆Emech(x)〉 = 〈∆Ekin(x)〉+〈∆Epot(x)〉 =12ρ0·S·∆x·ω2·u20 =
12ρ0·S·∆x·(u(max)t )2(106)
Dodajmy, że rozkład (czasowy i przestrzenny) wartości energii mechanicznej w ośrodkusprężystym, w którym rozchodzi się płaska fala akustyczna w dodatnim kierunku osi OX opisujefunkcja
∆Emech(x, t) = ∆Ekin(x, t)+∆Epot(x, t) = 212·ρ0 ·∆x ·S ·u2t = ρ0 ·∆x ·S ·u2t (x, t),(107)
34

co ilustruje kolejny rysunek. Jak widzimy dany element objętości ∆V ośrodka uzyskuje jedno-cześnie maksymalne (minimalne) wartości energii potencjalnej i kinetycznej45.Związki energetyczne w polu fali akustycznej opisuje się wielkością zwaną intensywnością46
fali akustycznej
〈I〉 := 〈∆Wmech〉S⊥
=〈∆Emech〉∆t · S⊥
, (108)
gdzie S⊥ = S jest powierzchnią ustawioną prostopadle do kierunku rozchodzenia się fali.Jak widzimy wielkość ta jest równa
〈I〉 = 〈∆Emech〉∆t · S⊥
=
14ρ0 · S ·∆x · (u(max)t )2 · u20
∆t · S =12· ρ0 · u20 · ω2 · c, (109)
gdzie skorzystano z relacji (105) Jednostką intensywności jestWm2.
6.3. Średnia wartość kwadratu ciśnienia akustycznego
Znajdziemy obecnie związek pomiędzy intensywnością 〈I〉 oraz średnia wartością 〈p2〉 kwa-dratu ciśnienia akustycznego p.Dla rozpatrywanej fali akustycznej u(x, t) = u0 cos(ωt− kx) spełniona jest relacja
∂u
∂x= −1c
∂u
∂t, (110)
gdzie c =ω
k. Ponadto, ciśnienie akustyczne jest związane z u(x, t) zależnością (patrz (68))
p(x, t) = K · s = −K(∂u/∂x).Z uwagi na związek (110) otrzymujemy
p(x, t) = −K(∂u/∂x) = Kc
(
∂u
∂t
)
= c · ρ(
∂u
∂t
)
,
skąd(
∂u
∂t
)
=1ρ0 · cp(x, t). (111)
Przypomnijmy, że (patrz wzór (104))
∆Ekin(x, t) =12ρ0S∆x
(
∂u
∂t
)2
,
więc, po uwzględnieniu relacji (111), otrzymujemy
∆Ekin(x, t) =12ρ0S∆x
( 1ρ0 · cp(x, t)
)2
i intensywność 〈I〉 fali akustycznej wynosi
〈I〉 = 2〈∆Ekin(x, t)〉∆tS⊥
=〈ρ0S⊥∆x
( 1ρ0 · cp(x, t)
)2
〉
S∆t=〈p2(x, t)〉ρ0 · c
. (112)
Jak widzimy średnia wartość kwadratu ciśnienia akustycznego 〈p2(x, t)〉 jest równa
〈p2(x, t)〉 = ρ0c〈I〉 =(ρ0u0ωc)2
2, (113)
45Jest to konsekwencją związku∂u
∂x= −1c
∂u
∂t, który pokazuje, że odkształcenie względne jest proporcjonalne
do prędkości ruchu cząsteczek ośrodka ut. Jest więc inaczej niż w przypadku drgań harmonicznych masym połą-czonej do sprężyny o współczynniku sprężystości k, gdzie maksymalne wartości energii kinetycznej i potencjalnejsą osiągane w różnych chwilach czasu.46Wielkość tę nazywa się także gęstością strumienia energii Φ definiowanego jako Φ = dW/dt
35
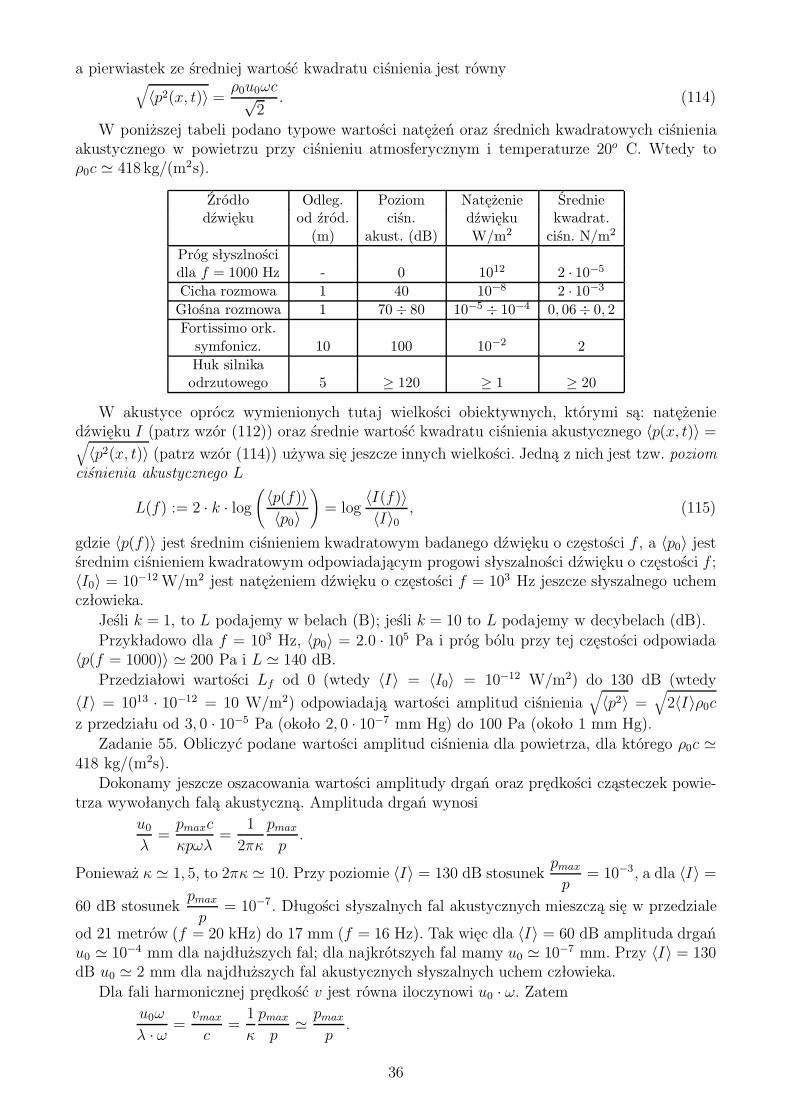
a pierwiastek ze średniej wartość kwadratu ciśnienia jest równy√
〈p2(x, t)〉 = ρ0u0ωc√2. (114)
W poniższej tabeli podano typowe wartości natężeń oraz średnich kwadratowych ciśnieniaakustycznego w powietrzu przy ciśnieniu atmosferycznym i temperaturze 20o C. Wtedy toρ0c ≃ 418 kg/(m2s).
Źródło Odleg. Poziom Natężenie Średniedźwięku od źród. ciśn. dźwięku kwadrat.
(m) akust. (dB) W/m2 ciśn. N/m2
Próg słyszlnościdla f = 1000 Hz - 0 1012 2 · 10−5Cicha rozmowa 1 40 10−8 2 · 10−3Głośna rozmowa 1 70÷ 80 10−5 ÷ 10−4 0, 06÷ 0, 2Fortissimo ork.symfonicz. 10 100 10−2 2Huk silnikaodrzutowego 5 ≥ 120 ≥ 1 ≥ 20
W akustyce oprócz wymienionych tutaj wielkości obiektywnych, którymi są: natężeniedźwięku I (patrz wzór (112)) oraz średnie wartość kwadratu ciśnienia akustycznego 〈p(x, t)〉 =√
〈p2(x, t)〉 (patrz wzór (114)) używa się jeszcze innych wielkości. Jedną z nich jest tzw. poziomciśnienia akustycznego L
L(f) := 2 · k · log(
〈p(f)〉〈p0〉
)
= log〈I(f)〉〈I〉0
, (115)
gdzie 〈p(f)〉 jest średnim ciśnieniem kwadratowym badanego dźwięku o częstości f , a 〈p0〉 jestśrednim ciśnieniem kwadratowym odpowiadającym progowi słyszalności dźwięku o częstości f ;〈I0〉 = 10−12W/m2 jest natężeniem dźwięku o częstości f = 103 Hz jeszcze słyszalnego uchemczłowieka.Jeśli k = 1, to L podajemy w belach (B); jeśli k = 10 to L podajemy w decybelach (dB).Przykładowo dla f = 103 Hz, 〈p0〉 = 2.0 · 105 Pa i próg bólu przy tej częstości odpowiada
〈p(f = 1000)〉 ≃ 200 Pa i L ≃ 140 dB.Przedziałowi wartości Lf od 0 (wtedy 〈I〉 = 〈I0〉 = 10−12 W/m2) do 130 dB (wtedy
〈I〉 = 1013 · 10−12 = 10 W/m2) odpowiadają wartości amplitud ciśnienia√
〈p2〉 =√
2〈I〉ρ0cz przedziału od 3, 0 · 10−5 Pa (około 2, 0 · 10−7 mm Hg) do 100 Pa (około 1 mm Hg).Zadanie 55. Obliczyć podane wartości amplitud ciśnienia dla powietrza, dla którego ρ0c ≃
418 kg/(m2s).Dokonamy jeszcze oszacowania wartości amplitudy drgań oraz prędkości cząsteczek powie-
trza wywołanych falą akustyczną. Amplituda drgań wynosiu0λ=pmaxc
κpωλ=12πκpmaxp.
Ponieważ κ ≃ 1, 5, to 2πκ ≃ 10. Przy poziomie 〈I〉 = 130 dB stosunek pmaxp= 10−3, a dla 〈I〉 =
60 dB stosunekpmaxp= 10−7. Długości słyszalnych fal akustycznych mieszczą się w przedziale
od 21 metrów (f = 20 kHz) do 17 mm (f = 16 Hz). Tak więc dla 〈I〉 = 60 dB amplituda drgańu0 ≃ 10−4 mm dla najdłuższych fal; dla najkrótszych fal mamy u0 ≃ 10−7 mm. Przy 〈I〉 = 130dB u0 ≃ 2 mm dla najdłuższych fal akustycznych słyszalnych uchem człowieka.Dla fali harmonicznej prędkość v jest równa iloczynowi u0 · ω. Zatem
u0ω
λ · ω =vmaxc=1κ
pmaxp≃ pmaxp.
36

Zauważmy, że wartośćvmaxcnie zależy od długości fali. Tak więc dla fali o 〈I〉 = 130 dB
amplituda prędkości stanowi około 340 · 10−3 = 0, 34 m/s. Jeśli 〈I〉 = 60 dB, to amplitudaprędkości jest rzędu 0, 10 mm/s.
6.4. Przenoszenie pędu przez fale akustyczne
Pokażemy, że fale akustyczne przenoszą nie tylko energię ale również pęd. Wyprowadzimytakże zależność pomiędzy ilością przenoszonej energii i przenoszonego pędu przez falę aku-styczną.W tym celu przypomnijmy, że chwilowa wartość gęstości energii (patrz wzór (67)) fali
sprężystej wynosi
ρE(x, t) = ρ · v2(x, t).Chwilowa gęstość masy powietrza (płynu) wynosi (patrz również (68))
ρ = ρ0 + ρg.
Chwilowa gęstość pędu ρpęd(x, t), tj. ilość pędu zawarta w jednostce objętości ośrodkasprężystego jest równa
ρpęd(x, t) := (ρ0 + ρg) · v(x, t). (116)
Z uwagi na relację (68) wartość ρg wynosi
ρg = ρ0 · s = ρ0 · (−ε) = ρ0v
c, (117)
gdzie wykorzystano związek (110).Średnia wartość gęstości pędu jest równa
〈ρpęd(x, t)〉 := 〈ρ0 · v(x, t)〉+ 〈ρg · v(x, t)〉 =ρ0〈v2(x, t)〉c
, (118)
gdzie skorzystano z tego, że 〈v(x, t)〉 = 0.Porównując zależności (68) oraz (118) otrzymujemy
〈ρpęd(x, t)〉 =〈ρE(x, t)〉c
. (119)
Zadanie 56. Jaki jest wymiar 〈ρpęd〉?Ostatni związek jest bardzo istotny i może być przepisany w nieco innej postaci. Niechaj
∆V = S⊥ · ∆x, będzie objętością ośrodka sprężystego, gdzie S⊥ jest powierzchnią ustawionąprostopadle do kierunku rozchodzenia się fali, który jest równoległy do osi OX zaś ∆x = c ·∆tjest odległością przebytą przez falę w czasie ∆t. Wtedy ilość energii mechanicznej ∆Emechzgromadzonej w tej objętości jest związana z ilością pędu ∆Πpęd w niej zawartą następującązależnością
∆Πpęd =∆Emechc. (120)
Tak więc, jeśli fala przenosi energię E, to fala ta przenosi także pęd Π w ilości47
Π =E
c. (121)
Na tej podstawie możemy więc twierdzić, że padające na daną powierzchnię fala przekazujejej pęd.Ponieważ pochodna pędu po czasie jest równa sile, tj.
Ffali =dΠdt=W
c, (122)
gdzie W jest mocą fali, to fala oddziaływuje na powierzchnię, na którą pada siłą daną wzo-rem (122).
47Wzór ten przypomina relatywistyczną relację dla fotonów: Π =E
c, gdzie Π i E są pędem i energią fotonu.
37

Dzieląc wartość Ffali przez wartość powierzchni S⊥ (na którą fala pada) otrzymujemywartośćciśnienia z jakim fala działa na powierzchnię
pfali =FfaliS⊥=〈I〉c, (123)
co oznacza, że znając intensywność fali 〈I〉 możemy policzyć wartość ciśnienia fali na po-wierzchni obiektu S⊥, na którą fala pada (lub który oświetla, jeśli falą tą jest światło).Dodajmy, że podane wyżej związki odnoszą się do wszystkich rodzajów fal, w tym także dla
światła.
6.5. Akustyczny efekt Dopplera
Częstość fali akustycznej zależy od prędkości względnych źródła i odbiornika tych fal.Z życia codziennego wiemy, że jeśli źródło i odbiornik zbliżają (oddalają) się do siebie, to
częstość odbieranej fali jest większa (mniejsza) od częstości emitowanej przez źródło.Zjawisko to nosi nazwę akustycznego efektu Dopplera.Rozpatrzymy kilka przypadków.1. Obserwator ruchomy, źródło spoczywa.1.1 Odbiornik zbliża się do źródła z prędkością vo. Oznacza to, że prędkość fali względemukładu związanego z obserwatorem wynosi c+ vo. Zatem częstość odbieranej przez niegofali dźwiękowej jest równa
f ′ =c+ voλ. (124)
Ponieważ f = c/λ, więc
f ′ = f(
1 +voc.)
(125)
1.2 Odbiornik oddala się od źródła z prędkością vo. Prędkość fali względem układu związa-nego z obserwatorem wynosi c−vo. Zatem częstość odbieranej przez niego fali dźwiękowejjest równa
f ′ =c− voλ. (126)
Zatem
f ′ = f(
1− voc
)
(127)
2. Obserwator nieruchomy, żródło porusza się.2.1 Źródło zbliża się do spoczywającego odbiornika. Z uwagi na ruch źródła długość faliodbieranej jest mniejsza o wartość ∆λ = vź · T = vź/f . Zatem długość odbieranej fali
λ′ = λ−∆λ = λ− vź/f (128)
i
f ′ =c
λ− vź/f=
c
c/f − vź/f=f
1− vźc
. (129)
Jak widzimy, obecnie częstość odbieranego dźwięku rośnie.2.2 Źródło oddala się od spoczywającego odbiornika. Z uwagi na ruch źródła dłudość faliodbieranej jest większa o wartość ∆λ = vź · T = vź/f i długość odbieranej fali
λ′ = λ +∆λ = λ + vź/f. (130)
Zatem
f ′ =c
λ + vź/f=
c
c/f + vź/f=f
1 +vźc
. (131)
38
Jak widzimy, częstość odbieranego dźwięku jest mniejsza od częstości f źrodła.
Podsumowaniem wszystkich powyższych wzorów jest
f ′ = fc± vc∓ vź
, (132)
gdzie znak górny (tj. +vo i −vź) dotyczy zbliżania się, zaś znak dolny (tj. −vo i +vź) dotyczyoddalania się odpowiednich obiektów.Jak widzimy, przy zbliżaniu (oddalaniu) się źródła lub odbiornika częstość odbieranej fali
akustycznej rośnie (maleje).Zadanie 57. Lokomotywa porusza się z prędkością vź = 40 m/s i wydaje gwizd o częstości
f = 500 Hz. Obliczyć częstość odbieranej fali przez nieruchomego obserwatora. Przyjąć, żec = 343 m/s. (Odp. 566 Hz.)Zadanie 58. Rozwiązać poprzednie zadanie dla obserwatora będącego w pociągu poruszają-
cym się ku lokomotywie z prędkością vo = 35 m/s. (Odp. 623, 7 Hz.)
Czarne dziury to egzotyka. Coś może tam wejść, ale nie możewyjść. Zniekształcają przestrzeń i czas. Są zwłokami pozosta-
łymi po największym znanym akcie przemocy i same powodująprzemoc.
Clifford A. Pickover48
7. Interferencja fal
Zajmiemy się obecnie zjawiskami, które można obserwować w ośrodku sprężystym, jeśli roz-chodzą się w nim jednocześnie dwie fale. W takich sytuacjach mamy do czynienia z nakładaniemsię fal sprężystych. Zjawisko to nazywamy interferencją fal. W tym rozdziale będziemy mówilio interferencji fal liniowych w ośrodkach liniowych49.Fale liniowe spełniają zasadę superpozycji
Rwyp(r, t) = R1(r, t) +R2(r, t), (133)
zgodnie z którą zaburzenie wypadkowe Rwyp(r, t) w danej chwili czasu t punktów ośrodkao współrzędnej przestrzennej r jest sumą wektorową zaburzeń docierających do tego punktuośrodka.
7.1. Interferencja fal monochromatycznych
Niechaj w ośrodku liniowym (np. strunie) rozchodzą się dwie identyczne płaskie fale sinu-soidalne w kierunku dodatnim osi OX, których równania fali mają postać:
y1(x, t) = A0 sin(kx− ωt) (134)
i
y2(x, t) = A0 sin(kx− ωt− φ). (135)
Wychylenie wypadkowe w punkcie ośrodka o współrzędnej x w chwili czasu t, zgodnie z zasadąsuperpozycji (133), jest równe
y = y1 + y2 = A0[sin(kx− ωt) + sin(kx− ωt− φ)], (136)
48Cytat pochodzi z książki: Clifford A. Pickover, Czarne dziury, Wydawnictwo Amber Sp. z.o.o, Warszawa1997.49W takim ośrodku siła przywracająca (odtwarzająca) stan równowagi jest proporcjonalna do odkształceniaośrodka. Ośrodki sprężyste spełniające prawo Hooke’a są tego najlepszym przykładem.
39

które, po skorzystaniu z odpowiedniego wzoru trygonometrycznego50, otrzymujemyy = 2A0 cos(φ/2) sin[kx− ωt− φ/2]. (137)
Wypadkowa fala (137) jest także falą sinusoidalną identyczną z falami interferującymi, którejamplituda Awyp = 2A0 cos(φ/2), a wypadkowa faza jest równa φ/2.Jeśli cos(φ/2) = 1, tj. φ/2 = n · π, to wypadkowa amplituda |Awyp| = 2A0. Ma to miejsce
wówczas, gdy różnica faz faliφ = n · 2 · π, n = 0, 1, 2, . . . (138)
Mówimy wtedy, że fale interferują konstruktywnie. Oznacza to, że garby (doliny) nakładająsię w fazie jeden na drugi.Jeśli [cos(φ/2)] = 0, tj. φ/2 = (2n + 1) · π/2, to wypadkowa amplituda |Awyp| = 0. Ma to
miejsce wówczas, gdy różnica faz faliφ = (2n + 1) · π, n = 0, 1, 2, . . . (139)
Mówimy, że fale interferują destruktywnie. W tym przypadku fale wygaszają się, ponieważgarb jednej trafia na dolinę drugiej.Przykładem tego jest nakładanie się fal biegnących po zamocowanej dwustronnie strunie.
Nałożenie się dwóch przeciwbieżnych fal y1 = A0 sin(kx − ωt) oraz y1 = A0 sin(kx + ωt) dajew rezultacie falę wypadkową
y(x, t) = 2A0 sin(kx) cos(ωt),nazywaną falą stojącą. Maksymalna amplituda tej fali wynosi ±2A0. Takie wartości przyjmujeona dla
kx =(2n + 1)π2
, n = 1, 2, . . . ,
co z uwagi na związek k =2πλprowadzi do
x(s)n =(2n + 1)λ4
, n = 1, 2, . . .
Punkty x(a)n wyznaczają położenia tzw. strzałek, a więc miejsc na strunie, w których amplitudajest maksymalna.Położenia x(w)n węzłów, w których amplituda jest równa zeru, określają związki
kx = n · π, n = 0, 1, 2, . . . ,co z uwagi na związek k =
2πλprowadzi do
x(w)n =nλ
2, n = 0, 1, 2, . . .
Zadanie 59. Ile wynosi odległość pomiędzy kolejnymi węzłami lub strzałkami fali stojącej?W jakiej odległości są rozłożone kolejne węzły i strzałki fali stojącej?Zadanie 60. Dwie fale y1 = 5, 0 cos(6, 0x−8, 0t) i y2 = 7, 0 cos(20, 0x−4, 0t), gdzie y i x jest
dane w centymetrach, a t w sekundach, interferują ze sobą. Wyznaczyć wychylenie w punkciex = 2, 0 i chwili czasu t = 4.Zadanie 61. Dwie fale harmoniczne mają postacie: y1 = (6, 0 m) sin(πx/15−πt/0, 005) oraz
y2 = (6, 0 m) sin(πx/15− πt/0, 005 − φ). Ile wynosi amplituda fali wypadkowej jeśli φ = π/6rad? Dla jakiej wartości φ amplituda fali wypadkowej będzie maksymalna?
7.2. Fale stojące na strunie
Weźmy pod uwagę strunę o długości L zamocowaną obustronnie. Rozpatrzmy najprostrzyprzypadek rozchodzenia się w niej dwóch fal monochromatycznych w dodatnim i ujemnymkierunku osi OX. W dowolnym punkcie struny wychylenie wynosi
y(x, t) = A exp[i(ωt− kx)] +B exp[i(ωt+ kx)],50sin(α) + sin(β) = 2 sin[(α+ β)/2] cos[(α− β)/2]
40

przy czym y(x = 0, t) = y(x = L, t) = 0 (warunki brzegowe). Z warunku y(x = 0, t) = 0wynika, że 0 = (A + B) exp(iωt) co prowadzi do związku A = −B. Jest to zgodne z naszymiwynikami dotyczącymi zachowania się fal sprężystych, gdy Z2 =∞ (końce struny odpowiadająośrodkowi z nieskończonym oporem falowym). Równanie fali przyjmie postać
y(x, t) = A exp(iωt)[exp(−ikx) + exp(ikx)] = −2iA exp(iωt)sin(kx).Drugi warunek brzegowy wymaga, aby
sin(kL) = sin(ω · L/c) = 0,co jest spełnione o ile
kL = ωL/c = n · π,gdzie n = 1, 2, 3, . . . .Zatem
ωn = 2πfn =nπc
L(140)
lub
fn =nc
2L=c
λn, (141)
co można przepisać w następujący sposób:
L = nλn2→ λn =
2Ln. (142)
Wyznaczone wyżej częstości fn wzorem (141) oraz długości λn formułą (142) są nazywanenormalnymi modami drgań struny zwanymi także drganiami własnymi.Podstawowym drganiem (harmoniką podstawową) nazywamy modę własną z n = 1.Jeśli n〉1, to na strunie są miejsca, w których dla dowolnego t wychylenie y = 0. Punkty te
noszą nazwę węzłów n–tego drgania własnego. Ma to miejsce dla tych punktów na strunie, dlaktórych
sin(nπx/L) = 0,
tj. dla
nπx(w)
L= jπ,
gdzie j = 0, 1, 2, . . . , n. Tak więc węzły n–tego drgania własnego są położone w punktacho współrzędnych
x(w)j =
L
n· j,
gdzie j = 0, 1, 2, . . . , n.Ponadto, całkowite wychylenie punktów struny w pobliżu x wykonującej n–te drganie wła-
sne wynosi
yn(x, t) = −i2A[cos(ωnt) + isin(ωnt)] sin(ωnx/c)] == [An cos(ωnt) +Bnsin(ωnt)] sin(ωnx/c)],
gdzie An, Bn są liczbami zespolonymi.Zadanie 64. Ile wynosi energia przenoszona przez stojącą falę w strunie zamocowanej obu-
stronnie?Ze wzoru (142) wynika, że długość fali n–tego drgania normalnego wynosi
λn =2Ln, n = 1, 2, 3, . . . , (143)
zaś częstość tych drgań
fn =c
λn=nc
2L. (144)
41

Ponieważ c =
√
N
ρl, gdzie N – naciąg struny, a ρl jej gęstość liniowa, więc
fn =n
2L
√
N
ρl, n = 1, 2, . . . (145)
Jak widzimy najniższa częstość drgań struny wynosi
f1 =12L
√
N/ρl
, gdzie f1 to częstość tonu podstawowego struny. Inne częstości drgań normalnych są jegowielokrotnością ponieważ fn = n · f1.Jeśli struna zostanie odkształcona w taki sposób, że jej kształt odpowiada n–tej harmonice,
to będzie ona wydawała dźwięk (zwany tonem) o częstości fn.Jeśli jednak strunę odkształcimy dowolnie, to będzie wydawała dźwięk będący złożeniem
jej wszystkich harmonik.Jak widzimy, częstość fn można zmieniać poprzez zmianę długości struny L lub też poprzez
zmianę jej naciągu N51. Zmianę naciągu wykonuje stroiciel (w przypadku fortepianu lub pianinakoncertowego) lub wykonawca muzyki gitarowej w celu dostrojenia instrumentu muzycznego.
7.3. Źródła dźwięków
Omówimy krótko najprostsze źródła dźwięków. Na wstępie zauważmy, że jeśli strunę zastą-pimy zamkniętą z obu stron tubą, to fale stojące wzbudzane w słupie powietrza w niej zawartymbędą miały prędkość dźwięku c, a długość i częstość tonów podstawowych (drgań normalnych)będą takie same, jak analogiczne wielkości w przypadku fal stojących w strunie zamocowanejna obu końcach, tj.
λ(tuby)n =2Ln, n = 1, 2, 3, . . . , (146)
f (tuby)n =n
2L
√
κP
ρ, n = 1, 2, . . . (147)
Oznacza to, że częstość n(> 1)–tego drgania normalnego jest całkowitą wielokrotnością częstościtonu podstawowego f1.Zadanie 65. Jakie częstości i długości fal stojących wykazuje tuba otwarta obustronnie? Czy
takie same długości drgań normalnych posiada swobodny pręt?Zadanie 66. Ile wynosi ciśnienie akustyczne w strzałkach a ile w węzłach stojącej fali aku-
stycznej?Jeśli pręt o długości L, zamiast na obu końcach, jest zamocowany tylko na jednym koń-
cuu, to posługując się pojęciami strzałki i węzłów możemy określić długość drgań normalnych(tj. fal stojących) takiego układu. Warunki brzegowe wymagają, aby jeden z węzłów był za-wsze umiejscowiony w zamocowanym końcu. Natomiast strzałka powinna zawsze tworzyć sięna niezamocowanym końcu. Zatem
L =(2n+ 1)λ4
, n = 1, 2, . . . . (148)
Zadanie 67. Uzasadnić ostatnią równość.Z tego równania otrzymujemy długości drgań normalnych (fal stojących) rozpatrywanego
układu
λn =4L
(2n+ 1), n = 1, 2, , 3, . . . (149)
51Te krótkie rozważania można by tutaj nazwać podstawami fizyki instrumentów muzycznych.
42

i odpowiadające im częstości tych fal52
fn =c
λn=(2n+ 1)4L
c, (150)
Jeśli strunę zastąpimy tubą (pudłem rezonasowym) jednostronnie zamkniętym, to fale sto-jące wzbudzane w słupie powietrza w niej zawartym będą miały prędkość dźwięku c, a długośći częstość tonów podstawowych (drgań normalnych) będą takie same jak analogiczne wielkościw przypadku fal stojących w strunie zamocowanej na jednym końcu, tj.
λ(tuby)n =4L
(2n + 1), n = 1, 2, 3, . . . , (151)
f (tuby)n =(2n + 1)4L
√
κP
ρ, n = 1, 2, . . . (152)
Oznacza to, że częstość n(> 1)–tego drgania normalnego jest nieparzystą wielokrotnością czę-stości tonu podstawowego f1.Jeśli pręt o długości L, zamiast na końcach, jest zamocowany pośrodku, to posługując
się pojęciami strzałki i węzłów możemy określić długość drgań normalnych takiego układu.Warunki brzegowe wymagają, aby jeden z węzłów był umiejscowiony zawsze w środku pręta,natomiast strzałki tworzą się na jego końcach. Zatem ton podstawowy ma długość
λ1 = 2L, (153)
zaś n–ty ton ma długość
λn =4L
2(2n+ 1)=2L2n + 1
, n = 1, 2, 3, . . . . (154)
Ile wynoszą, w tym przypadku, częstości drgań podstawowych? Odpowiedzi na to pytaniepowinien udzielić sobie samodzielnie Czytelnik.
7.4. Dudnienia
Zajmiemy się obecnie interferencją fal akustycznych, która ma miejsce w czasie (poprzednioomówiliśmy przykłady interferencji przestrzennej). Wyobraźmy sobie, że do naszego ucha do-cierają z dwóch różnych źródeł fale akustyczne, których częstości różnią się niewiele. Nasze uszybędą odbierały w takim przypadku okresowe wzmocnienia i osłabienia, które przyjęto nazywaćdudnieniami.Opiszmy to zjawisko ilościowo. Niechaj interferują ze sobą fale53 sinusoidalne
y1 = A0 sin(2πf1t) oraz y2 = A0 sin(2πf2t). (155)
Z zasady superpozycji (133) otrzymujemy
y = y1 + y2 = A0[cos 2πf1t+ cos 2πf2t]
oraz
y = 2A0 cos[
2πt(
f1 − f22
)]
cos[
2πt(
f1 + f22
)
t]
.
Oznacza to więc, że wypadkowa częstość fali jest równa fw = (f1+ f2)/2, zaś amplituda zależyod czasu jak
A(t) = 2A0 cos 2π(
f1 − f22.)
(156)
52Wyprowadzone związki często zapisuje się w postaci L =mλ
4, m = 1, 3, 5, . . . ., tj. λn = 4L/m. Drganie
podstawowe ma fale o długości λ1 = 4L. Częstości fal stojących wynoszą fm = c/λm =mc
4L= m
c
4l= mf1, tj.
częstość drgań normalnych jest obecnie nieparzystą wielokrotnością tonu podstawowego f1 = c/(4L).53Pomijamy zależność od x.
43
Tak więc częstość zmian amplitudy jest równa (f1 − f2)/2. Ponieważ w ciągu jednego okresuA2(t) wykazuje dwa maksima, to częstotliwość dudnień wynosi
fd = |f1 − f2|. (157)Zadanie 68. Wyznaczyć fw oraz fd jeśli nakładają się dwie fale o częstościach f1 = 438 Hz
i f2 = 442 Hz.
7.5. Rezonans
W układach mechanicznych, o których mówiliśmy do tej pory, można obserwować zjawiskuresonansu, jeśli zewnętrzne zaburzenie będzie zmienne w czasie, a częstość tych zmian bliskajednej z częstości drgań własnych układu. W takiej sytuacji mówimy o zjawiska rezonansuczęstości.Można to zjawisko obserwować w wielu sytuacjach. Śpiewak (śpiewaczka) o dużej sile głosu,
na skutek resonsu, może powodować pękanie szklanych ścianek kieliszków lub szklanek.Jeśli do zamocowanej jednostronnie struny dołączyć drgającą harmonicznie żyletkę, to przy
zmianie częstości drgań tejże żyletki możemy obserwować rezonans częstości, który przejawia sięw tym, że jeśli częstość ruchu harmonicznego żyletki staje się równa częstości drgań normalnych,to struna zaczyna intensywnie drgać (wówczas wykonuje jeden z dopuszczalnych typów drgańnormalnych).Podobne zjawisko obserwujemy w układzie złożonym z kilku wahadeł matematycznych pod-
wieszonych na jednym pręcie. Wprawienie jednego z nich w ruch powoduje drgania innych.Największe wychylenia można obserwować dla wahadła (początkowo spoczywającego), któregodługość jest najbardziej zbliżona do długości wahadła wprawionego w ruch jako pierwsze.
Penrose wykazał, że jeśli siły grawitacyjne wywierane przezmaterię we Wszechświecie były zawsze i wszędzie przyciąga-
jące i jeśli we Wszechświecie jest dostatecznie dużo materii, tooddziaływanie grawitacyjne sprawia, że przedłużenie wszyst-
kich promieni świetlnych wstecz aż do nieskończoności jestniemożliwe.
John D. Barrow54
8. Prędkość grupowa i modulacja fal
Do tej pory rozpatrywaliśmy głównie fale monochromatyczne typu y(x, t) = y0 cos(ωt−kx).Wyjątkiem był podrozdział dotyczący dudnień, które powstają w wyniku nakładania się dwóchfal o niewiele różniących się częstościach.Tutaj zajmiemy się innym typem dudnień jakie powstają w wyniku nakładania się dużej
liczby (większej niż dwie) fal monochromatycznych o niewiele różniących się częstościach. Wy-tworzony w ten sposób obiekt nazywamy paczką fal, pakietem fal lub grupą fal. Pokażemy,że prędkość z jaką poruszają się takie obiekty jest prędkością grupową vgr, którą zdefiniujemyi omówimy dość szczegółowo. Uzasadnimy, że prędkość grupowa jest prędkością z jaką przeno-szona jest przez falę energia.Za pomocą fali monochromatycznej nie można przekazać żadnej informacji55. W celu jej
wykorzystania do przenoszenia informacji musimy fale modulować, tj. coś w niej zmieniać
54Cytat pochodzi z książki: John D. Barrow, Początek Wszechświata, Wydawnictwo CIS, Warszawa 1995.55Biegnąca fala o jednej częstości wytwarza w punkcie do którego dociera zawsze ten sam, cyklicznie powta-rzający się efekt, którym jest ruch harmoniczny cząsteczek ośrodka.
44

w taki sposób, aby odbiorca był w stanie zmiany te odczytać (w procesie demodulacji).Modulować można amplitudę56, częstość57 lub fazę fali. W takich przypadkach źrodło fali
nie wykonuje prostego ruchu harmonicznego, który jak wiemy jest źródłem fal sinusoidal-nych. Generator fali zmodulowanej (np. nadawcze anteny radiowe lub telewizyjne) wytwarzadrgania, których zaburzenie y(t) = f(t) nie jest drganiem harmonicznym lecz superpozycją faltypu
yampl(ω, t) = A(ω) cos[ωt+ φ(ω)],
gdzie A(ω) i φ(ω) są, odpowiednio, amplitudą i fazą fali składającej się na f(t)58.W celu zrozumienia podstawowych właściwości paczki fal zajmiemy się superpozycją dwóch
fal kosinusoidalnych. Niechaj w x = 0 umieszczony będzie generator (antena) emitujący w pół-przestrzeń 〈0,∞〉 dwie fale kosinusoidalne
y1(t) = A cos(ω1t), y2(t) = A cos(ω2t). (158)
Złożenie tych dwóch fal w źródle jest równoważne drganiu
y(t) = Amod(t) cos(ωśrt), (159)
gdzie
Amod(t) = 2A cos(ωmodt), (160)
ωmod =|ω1 − ω2|2, ωśr =
ω1 + ω22. (161)
Zadanie 69. Wyprowadzić powyżej podane związki.Jeżeli |ω1 − ω2| ≪ ω1 i |ω1 − ω2| ≪ ω2, to ωmod jest o wiele mniejsza od wartości średniej
ωśr, tj. ωmod ≪ ωśr. Jak widzimy formuła (159) opisuje drgania prawie(kwazi)harmonicznez amplitudą Amod zależną od czasu z częstością modulacji proporcjonalną do ωmod. Generatorjest więc źródłem dudnień.Obliczymy obecnie wartość zaburzenia y(x, t) w punkcie x ośrodka, do którego dotrze zmo-
dulowany sygnał generatora. Podobne do powyższych przekształcenia prowadzą do
y(x, t) = Amod(x, t) cos(ωmodt− kśrx), (162)
gdzie
ωmod =ω1 − ω22
(163)
kmod =k1 − k22
(164)
ωśr =ω1 + ω22
(165)
kśr =k1 + k22. (166)
Zadanie 70. Wyprowadzić zależności (162÷ 166).Z jaką prędkością rozchodzi się w ośrodku modulacja amplitudy? Jest to pytanie dotyczące
prędkości propagowania się w ośrodku stałej fazy amplitudy, która jest równa
φampl = ωmodt− kmodx.Z warunku φampl = const otrzymujemy59
dφampl = 0 = ωmoddt− kmoddx,56Symbol AM na odbiornikach radiowych o tym świadczy.57Producenci odbiorników radiowych używają symbolu FM do wskazania tego typu modulacji.58Podkreślmy, że f(t) jest sumą yampl(ω, t). Sumowanie przebiega po różnych ω. W tym sensie f(t) jest grupą(zbiorem) różnych fal.59Obliczamy różniczkę zupełną φampl.
45

z którego wynika szukana prędkość rozchodzenia się stałej amplitudy(dxdt
)
ampl
= vmod =ωmodkmod
=ω1 − ω2k1 − k2
. (167)
Wprowadzimy obecnie pojęcie związku dyspersyjnego.
Związkiem dyspersyjnym nazywamy zależność pomiędzy częstością kołową ωi wektorem falowym fali, co zapisujemy w postaci ω(k).
Jeśli w danym ośrodku ω(k) = const · k, to mówimy, że dyspersja jest liniowa.Zauważmy, że wszystkie rozpatrzone do tej pory fale sprężyste były falami wykazującymi
liniową dyspersję60.Rozpatrzymy dokładniej prędkość vmod. Jeśli ω(k), to ω1 = ω(k1), ω2 = ω(k2). Niechaj
k2 = k1 +∆k. Rozwiniemy ω2 = ω(k2) na szereg Taylora wokół punktu k1
ω(k2) = ω(k1) +(
dω
dk
)
k=k1
∆k + . . . .
Po podstawieniu tego związku do wzoru (167) otrzymujemy
vmod = vgr =dωdk. (168)
Prędkość vmod będziemy nazywali prędkością grupową i oznaczali symbolem vgr.
Jak widzimy prędkość rozchodzenia się stałej amplitudy vmod = vgr. Zauważmy jeszcze, żewyznaczona prędkość grupowa vgr jest prędkością rozchodzenia się w ośrodku energii stowarzy-szonej z falą, ponieważ ilość energii transportowanej przez falę jest proporcjonalna do kwadratujej amplitudy Amod (patrz relacja (62)).
8.1. Modulacja amplitudowa fal radiowych
Jako przykład modulacji omówimy krótko fale radiowe o modulowanej amplitudzie AM61.Napięcie wyjściowe anteny radiowej ma określoną częstość zwaną częstością nośną (odpo-wiada to wartości ωśr w przypadku składania dwóch fal monochromatycznych), a jego amplitudajest zmodulowana i ma postać
Amod(t) = A0 +∑
ωmod
A(ωmod) cos[wmodt+ φ(ωmod)]. (169)
Przy czym różnica amplitud Amod(t)− A0 jest proporcjonalna do ciśnienia fali towarzyszączejmowie, tj. dźwiękowi, którego źródłem jest osoba mówiąca (na to ciśnienie czuły jest mikrofon).Częstości ωmod leżą w zakresie częstości fal akustycznych, tj. od 20 Hz do 20 kHz. Napięciecałkowite przyłożone do anteny ma więc postać
U(t) = Amod(t) cos(ωśrt) =
= A0 cos(ωśrt) +∑
ωmod
A(ωmod) cos[ωmodt+ φ(ωmod)] cos(ωśrt),
które można przepisać jako
U(t) = A0 cos(ωśrt) +12
∑
ωmod
A(ωmod) cos[(ωmod + ωśr)t+ φ(ωmod)]+
+12
∑
ωmod
A(ωmod) cos[(ωśr − ωmod)t− φ(ωmod)]. (170)
60Przykładowo, dla fal poprzecznych rozchodzących się w strunie ω = k ·√
N/ρ.61Ten typ modulacji jest wykorzystywany na falach długich.
46

Zadanie 71. Wyprowadzić wzór (170).Napięcie przyłożone do anteny jest więc złożeniem kilku drgań, którymi są:
1. Drgania harmoniczne o częstości ωśr = 2πfśr zwanej częstością nośną; jest to częstość naktórej nadaje dana radiostacja.
2. Suma drgań harmonicznych
12
∑
ωmod
A(ωmod) cos[(ωmod + ωśr)t+ φ(ωmod)]
zwanych górnym pasmem bocznym.
3. Suma drgań harmonicznych
12
∑
ωmod
A(ωmod) cos[(ωśr − ωmod)t− φ(ωmod)]
zwanych dolnym pasmem bocznym.
Napięcie U(t) jest więc superpozycją składowych harmonicznych o częstościach kątowychspełniających nierówności
ωśr − ωmaxmod ≤ ω ≤ ωśr + ωmaxmod, (171)
co można zapisać dla częstości w postaci
fśr − fmaxmod ≤ f ≤ fśr + fmaxmod . (172)
Wartość
∆f = fmax − fmin = 2fmaxmodnazywamy szerokością pasma. Zatem jedna radiostacja zajmuje w widmie fal radiowych prze-dział 〈fśr − fmaxmod , fśr + fmaxmod〉. Dla fal akustycznych fmaxmod = 20 kHz. W rzeczywistości, na mocyodpowiednich umów, fmaxmod = 5 kHz i w sygnale podawanym na antenę znajdują się częstościz przedziału 〈fśr − 5 kHz, fśr + 5 kHz〉.Napięcie podawane na antenę radiową, która emituje biegnące fale elektromagnetyczne
i ma postać (170). Fale te są superpozycją składowych fal harmonicznych zajmujących określonywyżej przedział częstości.W przypadku fali AM o częstości nośnej fśr = 103 kHz, pasmo częstości radiowych rozciąga
się od 995 kHz do 1005 kHz. Jak widzimy częstość nośna jest o wiele większa od częstościmodulacji.
8.2. O przekazie obrazu telewizyjnego
Ekran telewizyjny stanowi prostokątną siatkę złożoną z pikseli (inaczej plamek). Pojedynczy
piksel jest odwiedzany przez wiązkę elektronową co130sekundy. Typowy ekran posiada około
25 · 104 plamek. Wynika stąd, że w ciągu jednej sekundy nadajnik telewizyjny musi wysłaćokoło N = 30 · 25 · 104 ≃ 107 impulsów. Zatem częstość napięcia w antenie telewizyjnej musibyć równa co najmniej 107 Hz= 10 MHz. Jeśli przyjąć, że częstość telewizyjnych fal nośnychmieści się w granicach od 50 do 200 MHz, to w podanym zakresie może się zmieścić jedynie 15kanałów telewizyjnych. W rzeczywistości szerokość pasma może być zmniejszona o połowę, cooznacza, że liczba kanałów jest dwukrotnie większa.Gdyby zastosować, jako nośnik, fale widzialne, których częstości mieszczą się w granicach
4, 6÷6, 6 ·108 MHz, to liczba kanałów staje się astronomiczna i osiąga wartość 2 · 1014
5 · 106 = 4 ·107
kanałów.
47

8.3. Prędkość grupowa a prędkość fazowa – dyspersja fal
Pokazywaliśmy niejednokrotnie, że
ω = c · k.Z definicji prędkości grupowej (patrz wzór (168)) wynika, że
vgr =dω
dk= c+ k
dc
dk. (173)
Z uwagi na to, że k =2πλwięc dk = −2π
λ2dλ i
vgr = c− λdcdλ. (174)
Jak widzimy prędkość rozchodzenia się energii fali zależy od długości fali. Otrzymane for-muły (173), (174) opisują dyspersję fali.Prędkość fazowa i grupowa są sobie równe pod warunkiem, że prędkość fazowa c nie zależy
od wektora falowego k, tj.dcdk= 0.
W wysokich warstwach atmosfery (w tzw. jonosferze) zależność dyspersyjna ma postać
ω2 = ω2p + c2k2,
dla ω〉ωp = 2 · 107 Hz; c – prędkość światła. Z tego związku wynika, ze
2ωdωdk= 2c2k,
zatem(
ω
k
)(dωdk
)
= cvg = vfvg = c2.
Ostatecznie
vf =
√
c2 +ω2pk2≥ c
i
vg = c
(
c
vf
)
≤ c.
Widzimy, że prędkość fazowa takich fal jest zawsze większa od prędkości światła. Natomiastprędkość grupowa jest nie większa od c.Inny przykład dotyczy fal powierzchniowych rozchodzących się po powierzchni wody (do-
statecznie głębokiej wody), dla których
ω2 = gk +N
ρk3,
gdzie g – przyspieszenie ziemskie, ρ – gęstość wody,N = 72·10−7N/m – napięcie powierzchniowewody.Zadanie 72. Wyznaczyć prędkość fazową i prędkość grupową dla fal powierzchniowych na
wodzie.
Dane dotyczące fal powierzchniowych na głębokich wodach.
48

λ f c vgrvgrc
cm Hz cm/s cm/s0,10 675 67,5 101,4 1,500,25 172 43,0 63,7 1,480,5 62,5 31,2 44,4 1,421.0 24,7 24,7 30,7 1,242.0 11,6 23,2 21,4 0,928.0 4,52 36,2 19,6 0,5416.0 4,14 50,3 25,8 0,51100.0 1,25 125 62,5 0,50400.0 0,625 250 125 0,501600.0 0,313 500 250 0,503200.0 0,221 708 354 0,506400.0 0,156 1000 500 0,50
Zadanie 73. Przypuśćmy, że jesteś na rozpalonej plaży i sprawdziłeś (jak?), że na sekundędo brzegu przybywa 12 fal na minutę. Oznacza to, że częstość fal f ≃ 0, 2 Hz. Wyznaczyćprzybliżoną wartość długości tych fal na otwartym morzu. Jaką odległość przebyła ta falaw ciągu godziny poprzedzającej moment jej zetknięcia się z plażą? Skorzystać z powyższejtabeli.Dodajmy, że paczka falowa rozmywa (rozpływa) się po upływie dostatecznie długiego czasu.
Dzieje się tak wskutek dyspersji, ponieważ fale monochromatyczne tworzące paczkę poruszająsię z różnymi prędkościami (patrz wzór (174)). Oznacza to, że jedne fale z paczki fal uciekajądo przodu (są to te, których prędkość grupowa vgr jest największa), a inne pozostają w tyle.
Skoro rozszerzanie się Wszechświata jest faktem, w przeszło-
ści musiał on wyglądać zupełnie inaczej niż obecnie.Igor Nowikow62
9. Fale nieliniowe
Fale akustyczne słyszalne uchem powodują w powietrzu stosunkowo małe wahania ciśnieniaatmosferycznego. Ich wartości nie przekraczają tysięcznych części ciśnienia atmosferycznego.Ponadto, prędkość tych fal nie zależy ani od częstości ani też od amplitudy fal akustycznych.W wielu sytuacjach mamy do czynienia z silnym (mówimy nieliniowym) zaburzeniem stanu
równowagi ośrodka, kiedy to rozchodzą się w nim tzw. fale nieliniowe. Prędkość takich falzależy zarówno od długości (wykazują one dyspersję) jak i od amplitudy fali63.Poniżej omówimy krótko dwa typy fal nieliniowych zwanych falami uderzeniowymi oraz
pojedyńczymi falami zwanymi także solitonami.
9.1. Fale uderzeniowe
Typowym tego przykładem są fale powstające w czasie eksplozji ładunku wybuchowego
62Cytat pochodzi z książki: Igor Nowikow, Czarne dziury i Wszechświat, Wydawnictwo Prószyński i S–ka,Warszawa 1995.63Dlatego nazywamy je falami nieliniowymi
49

(atomowego, termojądrowego64), zgromadzonego w nadmiarze w pomieszczeniu gazu ziemnegolub podczas ruchu w powietrzu samolotów ponaddźwiękowych.
Jeśli obiekt porusza się w ośrodku z prędkością vo większą od prędkości dźwięku c, to powo-duje powstanie fali uderzeniowej. Dobrym przykładem takiego obiektu jest kaczka poruszającasię dostatecznie szybko po powierzchni stawu. Za ogonem kaczki tworzy się fala uderzeniowaw kształcie litery V, która powstaje wskutek tego, że prędkość kaczki jest większa od prędkościfal na powierzchni wody. Podobny efekt możemy obserwować, gdy statek płynie dostatecznieszybko po rzece. Towarzyszy temu także fala uderzeniowa rozchodząca się w kształcie litery Vpo powierzchni wody65. Warto w tym miejscu dodać, że huk wystrzału lub eksplozji rozchodziesię w powietrzu znacznie szybciej niż odgłos komendy: Ognia!.
Fala uderzeniowa to bardzo złożone zjawisko. Z frontem tej fali związana jest skokowazmiana gęstości, temperatury i ciśnienia. Gęstość powietrza nie może wzrosnąć powyżej pewnejskończonej wartości. Natomiast wartości temperatury i ciśnienia mogą być ogromne. Przy-kładowo, podczas skoku ciśnienia o 100 atmosfer temperatura frontu fali rośnie do 3500◦C.W takiej temperaturze część molekuł powietrza rozpada się na atomy (dotyczy to cząsteczekO2) co wywoduje określone reakcje chemiczne. Przy jeszcze wyższych temperaturach powstajesilne świecenie (błysk wybuchu). Apokaliptyczna fala uderzeniowa (ognista kula jaśniejsza odtysiąca słońc) towarzyszy wybuchowi bomby jądrowej.
Kolosalnie silna powietrzna fala uderzeniowa towarzyszyła ponadźwiękowemu ruchowi orazupadkowi (30 czerwca 1908 roku) meteorytu tunguskiego. Tuż przed jego upadkiem obser-wowano, w przeciągu kilku sekund, oślepiająco jasną kulę. Momentowi uderzenia w Ziemiętowarzyszył ogłuszający wybuch słyszalny na odległościach powyżej tysiąca kilometrów66.
Świecenie meteorytów oraz sztucznych sputników Ziemi wchodzących w jej atmosfere tłuma-czymy powstawaniem fali uderzeniowej. W tym drugim przypadku działa ona jak spadochroni zapewnia wyhamowanie sputnika w górnych warstwach atmosfery67.
Opiszemy krótko propagację fali uderzeniowej w atmosferze. W tym celu rozpatrzymy obiektporuszający się na wysokości H nad powierzchnią Ziemi z prędkością naddźwiękową. Ruchowitemu towarzyszy fala uderzeniowa (shock wave) w kształcie stożka.
Stosunkowo proste rozważania prowadzą do wniosku, że połowa kąta Θu rozwarcia stożkafali uderzeniowej spełnia związek
sin(Θu) =c
vo=
1LMacha
, (175)
gdzie stosunekvoc= LMacha nazywany jest liczbą Macha.
Samolot poruszający się z prędkością ponaddźwiękową jest źródłem zazwyczaj dwóch stoż-ków ponaddźwiękowych związanych z dwoma falami uderzeniowymi, jakie generują w powietrzudziób samolotu oraz jego skrzydła i ogon. Takie fale uderzeniowe niosą ze sobą ogromną ilośćenergii i są w stanie nawet burzyć budynki znajdujące się na powierzchni Ziemi (jeśli samolotleci nisko).
64W momencie eksplozji tej bomy ciśnienie w strefie reakcji osiąga wartości 1010 atmosfer, a temperatura 107◦C.65Jest to w rzeczywistości grupa fal, o czym mówiliśmy wcześniej.66Falę powietrzną wywołaną tym wybuchem zarejestrowano w Anglii. Siła wybuchu odpowiadała wybuchowiładunku jądrowego o sile kilku megaton.67Historia II wojny światowej zna przypadek cudownego uratowania się rosyjskiego lotnika, którego spadochronnie otworzył się i śmierć wydawała się być nieunikniona. Jednak w ostatnim momencie, poprzedzającym upadek,pod lotnikiem wybuchła bomba lotnicza, której fala uderzeniowa wyhamowała jego prędkość i uratowała mużycie.
50
9.2. Solitony
Do tej pory omawialiśmy liniowe fale lub liniowe paczki falowe68.Okazuje się, że jeśli amplituda fali jest dostatecznie duża i fala ulega dyspersji69, to w ośrodku
sprężystych mogą rozchodzić się zlokalizowane (tj. skoncentrowane (skupione) w ograniczonymobszarze ośrodka) zaburzenia stanu równowagi ośrodka, które nazywamy solitonami.Solitony są falami nieliniowymi, które wykazują właściwości typowe dla cząstek, ponieważ
zderzając się ze sobą zachowują się jak sprężyste kule70. Ta właściwość jest na tyle interesu-jąca, że solitony stały się w latach 70– i 80–tych obiektem71 ogromnego zainteresowania naukpodstawowych i stosowanych.Po raz pierwszy solitony zaobserwował na powierzchni wody kanału żeglugowego i opisał
w 1834 roku angielski inżynier, budowniczego statków z epoki wiktoriańskiej Scott Russel. Otofragment jego opisu dotyczący obserwacji ruch barek i wody w kanale wodnym.Śledziłem ruch barki, którą szybko ciągnęła po wąskim kanale para koni, gdy nieoczekiwanie
barka zatrzymała się; ale masa wody, którą wprawiła w ruch barka, nie zatrzymała się. Zamiasttego woda zebrała się u dziobu barki w stanie szalonego ruchu i potem nieoczekiwanie zostawiłają w tyle tocząc się do przodu z dużą prędkością i przyjmując postać dużego pojedynczego wznie-sienia, tj. okrągłego, gładkiego i wyraźnie zaznaczonego wodnego wzgórza, które kontynuowałoswój ruch wzdłuż kanału, wcale nie zmieniając swojego kształtu ani nie zmniejszając prędkości.Podążyłem za nim i kiedy go dogoniłem on tak jak poprzednio toczył się naprzód z prędkościąokoło 8 lub 10 mil na godzinę zachowując swój początkowy kształt wzniesienia o długości około13 stóp i wysokości od jednej do półtora stopy. Jego wysokość stopniowo malała, i po jednej lubdwóch milach pogoni straciłem go w zakolach kanału. W ten sposób w sierpniu 1834 roku poraz pierwszy przyszło mi zetknąć się z niezwykłym i pięknym zjawiskiem, które nazwałem falątranslacji;. . .Russel ustalił kilka podstawowych właściwości odkrytych fal nieliniowych:
1. Prędkość i kształt fali nieliniowej pozostaje niezmienny w czasie.
2. Prędkość fali zależy od głębokości kanału h oraz od wysokości fali A (tj. jej amplitudy):v(h,A) =
√
g(h+ A), gdzie g – przyspieszenie ziemskie i A〈h/3.3. Dostatecznie duże fale rozpadają się na dwie mniejsze, z których jedna porusza się z więk-szą prędkością od drugiej.
4. Obserwowano tylko fale o kształcie wzniesienia (garbu) powierzchni wody.
5. Fale translacji zderzały się ze sobą przenikając jedna przez drugą bez zauważalnych zmiankształtu (wyglądało to tak jakby zderzały się sprężyście dwie cząstki).
Okazuję się, że istnienie tych fal, które dzisiaj nazywamy solitonami72 jest konsekwencjązrównoważenia się dwóch przeciwstawnych efektów (mechanizmów), którymi są:
1. Nieliniowość — powoduje wzrost wysokości i zwężenie się fali nieliniowej; efekt ten deter-minuje zachowanie się fal morskich, które najpierw rosną (wtedy obserwujemy, że wyso-kość i szerokość fali morskiej rośnie), a potem załamują się i przelewają się z hukiem (wpostaci bałwanów morskich) na powierzchni morza.
2. Dyspersja — dąży do uczynienia fali bardziej łagodną i rozmytą; przypomnijmy, że falanieliniowa jest zbiorem różnych fal (o różnych długościach), a więc o innych prędkościachco sprzyja rozmywaniu się tej fali (patrz wzór (174)).
68Uwaga ta nie dotyczy fal uderzeniowych.69Wtedy prędkość grupowa takiej fali zależy od amplitudy oraz od długości fali.70Pokazali to numerycznie w 1965 roku N.J. Zabusky i M.D. Kruskal.71Zainteresowanie nimi trwa do dzisiaj.72Termin powstał w 1965 roku. Pierwotnie zaproponowano nazwę solitron (bardzo podobną do elektron), alez uwagi na to, że na rynku amerykanskim istniała firma o nazwie Solitron, zgubiono jedną literkę i przyjętoostatecznie nazwę soliton.
51

Obecnie pod pojęciem solitonu rozumie się każdą zlokalizowaną nieliniową falę, która od-działywuje z dowolnymi zaburzeniami lokalnymi ośrodka i odtwarza swoją pierwotną postać.Matematyczne podstawy fal nieliniowychpodali holenderscy matematycy Diderick Johannes
Korteweg i Gustaf de Vries, którzy sformułowali równanie, zwane równaniem Kortiewieg–deVries’a (w skrócie KdV) opisujące fale Russela
∂y
∂t+ v0
∂
(
y +34hy2 +h2
6∂2y
∂x2
)
∂x= 0. (176)
Jego rozwiązanie, opisujące soliton KdV, ma postać
y(x, t) =A
cosh2(
x− vtl
) , (177)
gdzie
v = v0[1 + (A/2h)], i l2 =43h2
A2v0 =
√
gh. (178)
Dodajmy, że A – amplituda fali, h – głębokość kanału i A < h/3.Jak widzimy równanie (176) jest nieliniowym równaniem różniczkowym (ponieważ wystę-
puje w nim człon y2), które ma bardzo specyficzne rozwiązanie dane formułą (177). Podanerozwiązanie ma charakter zlokalizowanego zaburzenia stanu ośrodka (można mówić o impulsie),które rozchodzi się w ośrodku zachowując swój kształt z prędkością zależną od amplitudy fali(patrz relacje (177) i (178)).Badania fal nieliniowych doprowadziły do bardzo interesująch rezultatów. Poniżej przedsta-
wiamy wybrane wyniki.Fale nieliniowe:1. Opisują rozchodzenie się impulsów elektrycznych w komórkach układu nerwowego czło-wieka i zwierząt.
2. Dają poprawny opis fal przypływowych w rzekach, zwanych także ścianami wodnymi,do których okresowo wlewa się woda mórz i oceanów wywołana falami przypływów. Od-nosi się to także do przemieszczania się fal powodziowych w rzekach. Pokazano, że pręd-kość vs ruchu ściany wody, tj. lokalnej różnicy poziomów h1〉h0 wody w rzece jest równa
vs =
√
gh1(h0 + h1)2h0
.
Dla h1 > h0 mamy vs > v0 =√gh0 co oznacza, że ściana wody porusza się po rzece
szybciej niż jakakolwiek fala powierzchniowa w rzece o głębokości h0.3. Mają zastosowanie do oceanicznych solitonów zwanych tsunami. Takie nieliniowe faletworzą sie najczęściej podczas podwodnego trzęsienia Ziemi. Powstają wówczas oce-aniczne tsunami mające długości dochodzące do 500 km i wysokości h = 10 m. Prędkośćtsunami jest rzędu v ≃ √g · h, co dla h = 1 km daje prędkość rzędu 100 m/s. Fale testają się szczególnie niebezpieczne przy podchodzeniu do brzegów. Wtedy ich prędkośćmaleje, wysokość rośnie73 zaś długość maleje74.Największe spustoszenia i ofiary ponoszą kraje nadmorskie.W szczególności Japonia i Chile. W 1896 roku tsunami dosięgło brzegów Japonii. Miałowysokość 30 m. Zginęło około 30 tys. ludzi.W dniu 28 grudnia 1908 roku na południu Włoch miało miejsce katastrofalne trzęsie-nie ziemi. Zginęło ponad 82 tys. ludzi. Część z nich na skutek ogromnych fal wodnych
73Można pokazać, że wysokość A tsunami zależy od głębokości h jak L2/h, gdzie L jest rzędu kilkudziesięciumetrów.74Można pokazać, że długość l tsunami zależy od głębokości h jak h2/L. Podane w dwóch ostatnich stopkachoszacowania są słuszne dla L < h
52
(tsunami) wywołanych trzęsieniem ziemi. Wybuch wulkanu Krakatau w 1883 roku spowo-dował powstanie tsunami o wysokości 45 m, które dotarły do brzegów Indonezji. Liczbaofiar sięgnęła 36 tys. osób75.
Oceany są naturalnym środowiskiem, w którym powstają, żyją i zanikają różne typy falnieliniowych, których badania są prowadzone przez instytuty naukowe krajów nadmor-skich.
W dniu 26 stycznia 2004 roku w wybrzeża południowo-wschodniej Azji uderzyło potężnetsunami wywołane trzęsieniem dna morskiego. Zginęło około 290 tys. ludzi, a ucierpiałow przybliżeniu 5 mln.
Więcej w Internecie na m.in. następujących stronach:http://pl.wikipedia.org/wiki/Tsunami,
http://www.ess.washington.edu/tsunami/index.html,
http://en.wikipedia.org/wiki/2004−Indian−Ocean−earthquake,http://www.pmel.noaa.gov/tsunami/,
http://www.digitalglobe.com/tsunami−gallery.html,
http://www.asiantsunamivideos.com/.4. Są pożyteczne do interpretacji grupy fal, jakie powstają na głębokich wodach pod wpły-wem wiatrów. Stabilne grupy fal, zwane grupowymi solitonami, zawierają od 14 do 20grzbietów fal, z których najwyższe (tj. najsilniejsze) mają numery od 7 do 9. Jest to znanamarynarzom morskim reguła, zgodnie z którą, najwyższe fale w grupie fal morskich mająnumery od 7 do 9.
5. Mogą być wykorzystywane do przesyłania sygnałów w światłowodach. W 1988 rokuw laboratoriach firmy Bell (USA) skonstruowano solitonowy telegraf.
75Z godnie z jedną hipotez, wybuch podwodnego wulkanu na Morzu Egejskim, wywołał tsunami, którezniszczyło Atlantydę.
53