Lenovo Helix2 Ug Ja ユーザーガイド - ThinkPad Helix (マシンタイ … · バッテリーが損傷した場合、または放電やバッテリー端子に異物の堆積を認めた場合は、使用を

1
付録A 回転群
A.1 群の定義
群G = A,B,C, · · ·とは次の条件を満たす元 A,B, · · · の集合である。(1)群の二つの元 A,Bに対し積 ABが存在し、これもまた群に属すること。(2)結合則: (AB)C = A(BC)が成立する。(3)単位元 1が存在し、全ての元 Aに対し、1A = A1 = A
(4)全ての元 Aに対し、逆元 A−1が存在し、A−1A = AA−1 = 1
特に AB= BAが成立するものを可換群 (アーベル群)と呼ぶ。並進演算や2次元平面での回転が該当する。AB, BAのとき、非可換群 (非アーベル群)と言う。3次元の回転や SU(N),N ≥ 2などがある。群が連続パラメターの解析関数であるとき、リー (Lie)群と言う。リー群に対してはどの元も
A(θ1,θ2 · · · ,θn) = exp(in
∑i=1
θiFi) (A.1)
と書ける。Fiをリー群の生成子と呼ぶ。我々に関心があるのはコンパクト・リー群である。コンパクトとはパラメターの変数領域が空間の有限体積内に閉じるものをいう。例えば 2次元空間の回転は 0≤ θ ≤ 2πであり、コンパクトである。ローレンツ群−1 < v < 1あるいは−∞ < η < ∞で非コンパクト群の例である。群の表現: 群の任意の元に対し行列U(A)演算子が対応し
U(A)U(B) = U(AB)U(A−1) = U−1(A)U(1) = 1(単位行列)
であるとき、この行列の集合を群Gの表現と呼ぶ。この行列の演算するベクトル空間を表現空間、次元(n)を表現の次元と言う。
例1 回転群 SO(N): 実変数 xi(i = 1∼ N)を座標に持つ N次元空間において、長さ L =√
∑Ni=1x2
i を不変に保つ全ての線形変換は O(N)群を作る。その中で連続パラメターがゼロの極限で無変換になるも
の、すなわち行列式が1であるものを SO(N)群という。この時の独立変数の数はn(n−1)
2である。
例2 SU(N): Special Unitary Group
複素変数 ui(i = 1∼ N)を座標に持つ N次元複素空間において、長さ L =√
∑Ni=1 |ui |2を不変に保つ全て
の線形変換でかつ行列式が 1であるもの。この時の独立変数の数は n(n−1)である。任意の SU(N)変換行列は N×Nのユニタリー行列で表せ、N2−1個の変数 θi と無軌跡のエルミート Fi を使って
U = exp
(i
N
∑i=1
θiFi
)、 Tr[Fi ] = 0, [Fi , Fj ] = i f i jk (A.2)

付録 A 回転群 2
と表せる*1) 。。Fi は SU(N)群の生成子であり、 fi jk を構造関数という。生成子の決め方は一義的ではないが、SU(2)ではパウリ行列 Fi = τi
2、SU(3)ではゲルマンの行列 Fi = λi2 を採用するのが普通である。
なお、エルミート行列は可換でない限り行列を作らない。
A.2 回転演算子
量子力学におけるローレンツ変換演算子を導くために、まず良く知られた3次元回転演算子を復習する。回転により座標は変換を受ける。3次元回転の一般形は
r ′ ≡
x′
y′
z′
= [Ri j ]
x
y
z
= Rr (A.3)
回転は長さ r =√
x2 +y2 +z2は変えないから、
r ′2 = r ′Tr ′ = rTRTRr = r2 = rTr (A.4a)
∴ RTR = 1 (A.4b)
すなわち Rは 3X3直交行列である。回転により座標と同じ変換をする3組の変数をベクトルと言い、V = (Vx,Vy,Vz)の様に書く。一例と
して z軸回りの角度 θの回転は
V ′x
V ′y
V ′z
=
cosθ sinθ 0
−sinθ cosθ 0
0 0 1
Vx
Vy
Vz
↔ V′ = Rz(θ)V (A.5)
ただし、これは座標軸を回転する受動的回転である。ベクトルそのものを動かす能動的回転は、θ →−θとして得られる。どちらの見方を採用しても物理的内容は同じである。微少角 δθだけの受動的回転は
Rz(δθ) = 1+ iSzδθ Sz =1i
dRz
dθ
∣∣∣θ=0
=
0 −i 0
i 0 0
0 0 0
(A.6)
と書ける。有限角の回転は微少角回転の積み重ねで得られる。
Rz(θ) = limn→∞ ∏
δθ=θ/n
(1+ iJzδθ)n = exp[iSzθ] (A.7)
Szを z軸回りの回転の生成子 (generator)と言う。同様に x軸y軸回りの回転生成子を定義する。生成子はエルミートである。
Sx =
0 0 0
0 0 −i
0 i 0
Sy =
0 0 i
0 0 0
−i 0 0
Sz =
0 −i 0
i 0 0
0 0 0
(A.8)
* 1) exp[iλλλ ·n( θ2)] = exp[iQ]と書けば U† = exp[−iQ]であるからユニタリーであることは明らか。Tr[U] = Tr[S−1US]であること
を使い、Sを使って Uを対角化し固有値を ηi すれば、detU = ∏i ηi = exp(∑i logηi) = eTr(logU) = eiTr[Q] となるので、Tr[Q] = 0ならば、detU = 1

付録 A 回転群 3
これら回転の生成子は次の交換関係を充たす。
[Si , Sj ] = iεi jkSk εi jk =
+1 i jk が 123の偶置換の時
−1 i jk が 123の奇置換の時(A.9)
εi jk をO(3)群の構造定数と呼ぶ。これは軌道角運動量演算子
L = r ×p = −i(xi∂ j −x j∂i) xi = (x,y,z) (A.10)
と同じ交換関係であるので、S= (Sx,Sy,Sz)も角運動量演算子と呼ぶ。軌道角運動量が座標変数に演算する演算子であるのに対し、Sはベクトルの成分に演算する演算子であり、固有もしくはスピン角運動量と呼ぶ。全角運動量は
J = L +S (A.11)
回転は三つのパラメター、回転軸方向 nと回転角 θ (あるいは三つのオイラー角でも良い)で指定できる。行列 Rは9個の変数を持つが直交条件 (A.4b)は6個の制限を与えるのである。結局、回転群O(3)の性質は3個の生成子とその交換関係 (構造定数)を指定することによりほぼ定まることになり、演算子は
R(n,θ) = expiJ·nθ (A.12)
と表現できる。
A.3 SU(2)群
U(2)変換の対象となる 2次元複素空間の基底ベクトル (スピノールと言う)を
ψ =
[ξ1
ξ2
](A.13)
と書くと。2×2のユニタリー行列で表せる。SU(2)変換はさらにユニモジュラー (detU = 1)である。変換によりスピノール成分は
ψ → ψ′ = Uψ すなわち
[ξ′1ξ′2
]=
[a b
c d
][ξ1
ξ2
](A.14)
の様に変換する。条件U−1 = U† および detU = 1 (A.15)
を入れると
U =
[a b
−b∗ a∗
], |a|2 + |b|2 = 1 (A.16)
と書き直せて独立なパラメターは3個となる。

付録 A 回転群 4
演習問題 A.1 式 (A.16)を参照して、[−ξ∗2
ξ∗1
]=
[0 −1
1 0
][ξ∗1ξ∗2
]= −iσ2ψ∗ (A.17)
が ψ =
[ξ1
ξ2
]と同じ変換をすることを示せ。
******************************************:
一般にN次元ユニタリー、ユニモジュラー行列は、N2−1個の独立なパラメターを持ちλλλ (λi ; i = 1∼N2−1)を無軌跡のエルミート行列とし、回転角 θと回転軸 n (n2 = 1)をパラメターとして
U = exp
[iλλλ ·n (
θ2)]
(A.18)
と言う形に表すことができる。
******************************************:
N = 2の場合無軌跡エルミート行列は3個あり、パウリ行列 λi = σi にとることができるので、ユニタリー変換の一般式は
U = exp[iσσσ2·θθθ
]= cos
θ2
+sinθ2
iσσσ ·n (A.19)
と書ける。si = σi/2は SU(2)群の生成子であり、かつ交換関係
[si , sj ] = iεi jksk (A.20)
を充たすから SU(2)生成子は回転群 O(3)の生成子と全く同じ交換関係を充たし密接に結びついていることが判る。O(3)群との関係を見るためにスピノール成分の積 Hi j = ξiξ∗j (i, j = 1∼ 2)の変換性を考慮してみよう。Hi j を 2×2のエルミート行列の成分と見なせば、独立なパラメターは 4個であるので、パウリ行列で展開できる。
H = a1+b ·σσσ = a1+
[bz bx− iby
bx + iby −bz
]= A +B (A.21)
この行列は SU(2)変換でH → H′ = UHU† = A′ +B′ = a′1+b′ ·σσσ (A.22)
の様な変換を受ける。A′ = a′1 = UAU† = Ua1U† = a1 ∴ a′ = a (A.23)
なので係数 aは SU(2)不変量である。実際、aを式 (A.21)から抽出するために両辺のトレース (軌跡)をとると
2a = Tr[H] = ξ1ξ†1 +ξ2ξ†
2 = |ξ1|2 + |ξ2|2 = ψ†ψ (A.24)
は確かに SU(2)不変量である。また Bの部分は変換により行列式の値が変わらないことに着目すると
detB′ = detUBU† = detB ∴ b′2x +b′2y +b′2z = b2x +b2
y +b2z (A.25)

付録 A 回転群 5
すなわち式 (A.21)で定義した b = (bx,by,bz)はSU(2)変換によりO(3)変換に従うベクトルとして振る舞うことが判る。実際 bの各成分が正しく Vの変換式 (A.5)に従うことを示そう。bxを抽出するために式(A.21)の両辺に σxを掛けてトレースをとり、Tr[σ2
x] = 2, Tr[σx] = Tr[σxσy] = Tr[σxσz] = 0を考慮すれば
bx =12
Tr[σxH] =12(σx, i j )ξ jξ†
i = ξ†i (σx, i j )ξ j = ψ†σxψ 同様に by = ψ†σyψ, bz = ψ†σzψ (A.26)
これに SU(2)変換を施す。z軸回りの回転は式 (A.19)で n = (0,0,1)として
bx → b′x = ξ′†σxξ′ = ξ†U†σxUξ (A.27)
= ξ†(
cosθ2−sin
θ2
iσz
)σx
(cos
θ2
+sinθ2
iσz
)ξ (A.28)
σzσxσz = −σx, σzσx = iσy等を入れれば
b′x = cosθ bx +sinθ by (A.29a)
同様にして
b′y = −sinθ bx +cosθ by (A.29b)
b′z = bz (A.29c)
となり、b = ψ†σσσψは確かにO(3)のベクトルとして振る舞うことが示された。
演習問題 A.2 スピノールの合成
2つの独立なスピノール ξ =
[ξ1
ξ2
]と ξ =
[η1
η2
]をスピン 1/2を持つ粒子と考えるとき
s=ξ1η2−ξ2η1√
2v :
vx = ξ2η2−ξ1η1√2
vy = ξ1η1+ξ2η2√2i
vz = ξ1η2+ξ2η1√2
(A.30)
はそれぞれスカラーおよびベクトル、すなわちスピン 0と 1の粒子として振る舞うことを示せ。
以上の議論からスピノール
[ξ1
ξ2
]に対する SU(2)演算とベクトル
x
y
z
に対する O(3)演算とは対応し
ていることが判った。
U = eiσσσ·θθθ/2 = cosθ2
+sinθ2
iσσσ ·n ⇔ R = eiJ·θθθ (A.31)
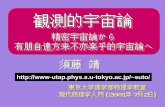
しかし、上式で判るように SU(2)では 4π回転して元に戻るのに対し、O(3)では 2π回転で元に戻る。2π ∼ 4πでは U →−Uであるがともに同じO(3)回転に対応し、SU(2) ⇔ O(3)は 1 : 2 対応となっている。O(3)は整数スピンの粒子しか扱えないのに反し、SU(2)群はスピン 1/2および反奇数の粒子群を表現できるのはこの差に起因する。基本粒子のクォークがスピン 1/2の粒子であること、中性子の結晶による干渉実験で実際に 4π回転で元に戻ることが示されるなど種々の実験事実は、我々を取り巻く実際の空間では SU(2)が真の回転演算に対応することが判る。また、図 A.1のような簡単な実験により実際に示すことができる。

付録 A 回転群 6
図 A.1: SU(2)トポロジーの図示: 4π回転後紐はステップ 3-8を実行することによりほぐすことができる。2π回転ではほぐすことがでない。C.W. Misner, K.S.Thorne and J.A Wheeler, Gravitation (W.H Freeman
1973)