MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO … · szym po wzroku źródłem informacji o...
22
MODELOWANIE INŻYNIERSKIE 2016 nr 58, ISSN 1896-771X 83 MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK FIZJOLOGICZNYCH TOWARZYSZĄCYCH ICH POBUDZENIOM Rafał Lewkowicz Zakład Szkolenia i Treningu Lotniczo-Lekarskiego, Wojskowy Instytut Medycyny Lotniczej [email protected] Streszczenie W artykule przedstawiono dotychczas niepublikowane w polskim piśmiennictwie metody modelowania fizycznego i matematycznego receptorów narządu przedsionkowego człowieka. Charakterystykę modeli poprzedzono opisem budowy i zasady działania receptorów przyspieszeń kątowych i liniowych tego narządu. Przedstawiono sposoby modelowania kanałów półkolistych, narządów otolitowych oraz zjawisk fizjologicznych towarzyszących pobudza- niom narządu przedsionkowego. Opisano stosowane podejścia przy wyznaczaniu wartości stałych czasowych mode- lu. Na podstawie charakterystyk częstotliwościowych przeprowadzono analizę właściwości dynamicznych modeli receptorów, wskazując spośród nich te, których odpowiedź najdokładniej odwzorowuje fizjologię narządu. Prezen- towane modele matematyczne mogą posłużyć do badania możliwości wystąpienia u człowieka w ruchu lądowym, powietrznym i morskim zaburzeń percepcji postaw i ruchu, powodujących zaburzenia równowagi oraz chorobę lo- komocyjną. Słowa kluczowe: modelowanie matematyczne, narząd przedsionkowy, kanały półkoliste, narząd otolitowy MODELS OF THE HUMAN VESTIBULAR SYSTEM RECEPTORS AND PHYSIOLOGICAL PHENOMENA ACCOMPANYING THEIR STIMULATION Summary The article presents previously unpublished in Polish literature methods of physical and mathematical modeling of the human vestibular system receptors. The characteristics of the models preceded by a description of the anato- my and function of receptors of angular and linear accelerations. They were presented ways of modeling the semi- circular canals, otolith organs and physiological phenomena accompanying vestibular system stimulation. De- scribes the approach used in determining the value of the time constants of the model. It described the approach used in determining the value of the time constants of the model. Described the approach used in determining the value of the model’s time constants. Based on the frequency characteristics it has been performed analysis of the dynamic properties of the model receptor, indicating among them, those which best matches the response of the organ physiology. Presented mathematical models can be used to study the possibility of the human in motion on land, in air and sea disturbance of attitudes perception and motion, causing imbalance and motion sickness. Keywords: mathematical modeling, human vestibular system, semicircular canals, otolith organs WAŻNIEJSZE OZNACZENIA ρe – gęstość endolimfy ρoto – gęstość kamyków błędnikowych μe – lepkość dynamiczna endolimfy νe – lepkość kinematyczna endolimfy me – masa endolimfy α – przemieszczenie kątowe kanału
Transcript of MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO … · szym po wzroku źródłem informacji o...

MODELOWANIE INŻYNIERSKIE 2016 nr 58, ISSN 1896-771X
83
MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK FIZJOLOGICZNYCH TOWARZYSZĄCYCH ICH POBUDZENIOM
Rafał Lewkowicz
Zakład Szkolenia i Treningu Lotniczo-Lekarskiego, Wojskowy Instytut Medycyny Lotniczej [email protected]
Streszczenie W artykule przedstawiono dotychczas niepublikowane w polskim piśmiennictwie metody modelowania fizycznego i matematycznego receptorów narządu przedsionkowego człowieka. Charakterystykę modeli poprzedzono opisem budowy i zasady działania receptorów przyspieszeń kątowych i liniowych tego narządu. Przedstawiono sposoby modelowania kanałów półkolistych, narządów otolitowych oraz zjawisk fizjologicznych towarzyszących pobudza-niom narządu przedsionkowego. Opisano stosowane podejścia przy wyznaczaniu wartości stałych czasowych mode-lu. Na podstawie charakterystyk częstotliwościowych przeprowadzono analizę właściwości dynamicznych modeli receptorów, wskazując spośród nich te, których odpowiedź najdokładniej odwzorowuje fizjologię narządu. Prezen-towane modele matematyczne mogą posłużyć do badania możliwości wystąpienia u człowieka w ruchu lądowym, powietrznym i morskim zaburzeń percepcji postaw i ruchu, powodujących zaburzenia równowagi oraz chorobę lo-komocyjną.
Słowa kluczowe: modelowanie matematyczne, narząd przedsionkowy, kanały półkoliste, narząd otolitowy
MODELS OF THE HUMAN VESTIBULAR SYSTEM RECEPTORS AND PHYSIOLOGICAL PHENOMENA ACCOMPANYING THEIR STIMULATION
Summary The article presents previously unpublished in Polish literature methods of physical and mathematical modeling of the human vestibular system receptors. The characteristics of the models preceded by a description of the anato-my and function of receptors of angular and linear accelerations. They were presented ways of modeling the semi-circular canals, otolith organs and physiological phenomena accompanying vestibular system stimulation. De-scribes the approach used in determining the value of the time constants of the model. It described the approach used in determining the value of the time constants of the model. Described the approach used in determining the value of the model’s time constants. Based on the frequency characteristics it has been performed analysis of the dynamic properties of the model receptor, indicating among them, those which best matches the response of the organ physiology. Presented mathematical models can be used to study the possibility of the human in motion on land, in air and sea disturbance of attitudes perception and motion, causing imbalance and motion sickness.
Keywords: mathematical modeling, human vestibular system, semicircular canals, otolith organs
WAŻNIEJSZE OZNACZENIA
ρe – gęstość endolimfy ρoto – gęstość kamyków błędnikowych
μe – lepkość dynamiczna endolimfy νe – lepkość kinematyczna endolimfy me – masa endolimfy
α – przemieszczenie kątowe kanału

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
84
Qe – kąt przemieszczenia endolimfy C – współczynnik oporu lepkiego endolimfy J – moment bezwładności endolimfy K – współczynnik siły sprężystości osklepka B – promień przekroju poprzecznego osklepka r – promień przekroju poprzecznego kanału; R – duży promień kanału (torusa) τ1 – długa stała czasowa kanału półkolistego τ2 – krótka stała czasowa kanału półkolistego τA – stała czasowa adaptacji kanału półkolistego τL – stała czasowa członu doprowadzającego τ1 oto – długa stała czasowa narządu otolitowego τ2 oto – krótka stała czasowa narządu otolitowego
1. WSTĘP Rozważania nad koncepcją orientacji przestrzennej
człowieka, odnoszącej się do naturalnej zdolności usta-lania i utrzymania pozycji ciała w stosunku do otacza-jącego środowiska, zwłaszcza podczas ruchu, sięgają początków lotnictwa. Codzienne czynności, związane z przemieszczeniem ciała, również za pomocą pojazdów lądowych i morskich, są uwarunkowane poczuciem wła-snego położenia, orientacji i ruchu. Zdolność orientacji przestrzennej człowiek zawdzięcza zmysłowi wzroku, słuchu, dotyku oraz narządowi przedsionkowemu i re-
ceptorom czucia głębokiego tzw. proprioreceptorów, których sygnały podlegają zintegrowaniu w ośrodko-wym układzie nerwowym (OUN). Drugim, najważniej-szym po wzroku źródłem informacji o położeniu i ru-chu ciała w środowisku na Ziemi, jest narząd przed-sionkowy (NP), którego receptory (kanały półkoliste oraz narządy otolitowe) dostarczają do OUN informacji o przyspieszeniu kątowym oraz liniowym głowy, za-pewniając szacowanie percepcji orientacji względem wektora grawitacji.
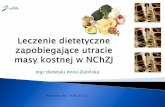
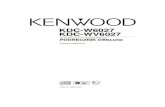
Wiedza o NP pochodzi głównie z badań przeprowa-dzanych na zwierzętach, gdyż oprócz niewielkich roz-miarów, główną trudnością w badaniu ucha wewnętrz-nego człowieka, a szczególnie NP, jest jego położenie, a zarazem i dostępność (rys. 1). Z tego powodu do prze-prowadzania wielu testów klinicznych używa się zjawisk wtórnych badających fizjologię narządu przedsionkowe-go, np. odruch przedsionkowo-oczny (Vestibular Ocular Reflex, VOR) lub tzw. oczopląs. Bezpośredni pomiar wielkości fizycznych w obrębie NP jest bardzo ograni-czony i eksperymentalnie wymagający np. pomiarów in vivo [1]. Ograniczenia te wprowadzają otwarte pole do rozważań teoretycznych, obejmujących m. in. modelo-wanie tego narządu na potrzeby badań in vitro [2].
Rys. 1. Lokalizacja receptorów narządu przedsionkowego w uchu wewnętrznym człowieka [3]
Tematyka niniejszego artykułu należy do jednego z najbardziej istotnych nurtów współczesnej fizjologii lotniczej i jest odpowiedzią na potrzebę zrozumienia zjawisk zachodzących w obrębie NP, w środowisku zmiennych przyspieszeń liniowych i kątowych. Złożo-ność zachodzących w środowisku lotu oddziaływań na
ustrój pilota sprawia, że odpowiednim sposobem po-szukiwania odpowiedzi na pytanie „jak skojarzone działanie przyspieszeń liniowych i kątowych wpływa na percepcję orientacji przestrzennej”, stają się obliczenia numeryczne.

RAFAŁ LEWKOWICZ
85
Celem pracy jest przegląd i charakterystyka do-stępnych w literaturze modeli fizycznych i matema-tycznych receptorów NP człowieka oraz zjawisk fizjolo-gicznych towarzyszących ich pobudzeniom. Dodatkowo, na podstawie analizy właściwości dynamicznych pre-zentowanych modeli, zamiarem autora jest wskazanie tych modeli, które najdokładniej odwzorowują fizjolo-gię modelowanego narządu.
2. NARZĄD PRZEDSIONKOWY – BUDOWA I DZIAŁANIE
Zlokalizowany w błędniku błoniastym labiryntu
kostnego kości skroniowej narząd przedsionkowy jest integralną częścią prawego i lewego ucha wewnętrznego (rys. 1). Narząd ten tworzą trzy, wzajemnie połączone, kanały półkoliste (KPK) reagujące na przyspieszenia kątowe i dwa narządy otolitowe (łagiewka i woreczek) reagujące na przyspieszenia liniowe.
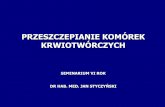
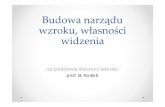
Rys. 2. Budowa receptorów narządu przedsionkowego [4]
2.1. KANAŁY PÓŁKOLISTE Kanały półkoliste labiryntu kostnego (rys. 2, kolor
jaśniejszy) są to trzy twory wypełnione perylimfą, we-wnątrz których zlokalizowane są błoniaste przewody półkoliste (rys. 2, kolor ciemniejszy) zawierające płyn zwany endolimfą.
Dla uzyskania lepszej widoczności na rys. 2 przed-stawiono średnicę przewodu błędnika błoniastego KPK w znacznym powiększeniu. W istocie ich średnica wy-nosi w przybliżeniu jedynie 5% średnicy części kostnej (jaśniejszej) kanału [5]. Kanały ułożone są w płaszczy-znach prawie prostopadłych względem siebie i reagują na przyspieszenia kątowe działające w płaszczyźnie ich ułożenia. Szczegółowa anatomia KPK została opisana w pracach [6–9].
Wszystkie trzy kanały błędnika błoniastego posia-dają wspólne połączenie w miejscu największej komory, w której zlokalizowany jest jeden z receptorów przy-spieszenia liniowego – łagiewka.
Kanały w pobliżu swojego połączenia tworzą bań-kowate rozszerzenia, w których umieszczone są komórki zmysłowe (mechanoreceptory), zwane komórkami rzę-satymi (rys. 2). Budowa tych komórek jest taka sama dla wszystkich pięciu pól receptorowych NP (trzech KPK, łagiewki i woreczka).
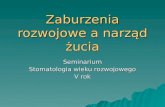
Powierzchnię każdej komórki pokrywa kilkadziesiąt rzęsek, zwanych stereocyliami i jedna odrębna, a jed-nocześnie najdłuższa z rzęsek, komórka zwana kinoci-lium (rys. 3). Komórki rzęsate zanurzone są w galare-towatej substancji, zwanej osklepkiem, który tworzy w bańce kanału przesłonę, blokującą przepływ endolimfy. Cechą charakterystyczną dla pól zmysłowych jest to, że wszystkie rzęsate komórki kinociliarne skierowane są w tę samą stronę. W rezultacie tego grzebienie narzą-dów bańkowych KPK są tak samo spolaryzowane.
Rys. 3. Budowa komórek sensorycznych osklepka [10]
1 – osklepek; 2 – stereocilia; 3 – kinocilium; 4 – komórka
sensoryczna typu HC II, 5 – komórka sensoryczna typu HC I,
6 – włókno komórki dwubiegunowej zwoju przedsionkowego W chwili zadziałania przyspieszenia kątowego bez-
władnościowy przepływ endolimfy powoduje przechyle-nie rzęsek komórek zmysłowych zgodnie z kierunkiem ruchu płynu (przeciwnym do działającego przyspiesze-nia). Wówczas na wyjściu z receptora uzyskiwany jest kodowany częstotliwościowo sygnał opisujący kierunek i wartość oddziałującego przyspieszenia [12]. Zmiana częstotliwości (wzrost lub spadek) informuje o kierunku działającego przyspieszenia, zaś różnica pomiędzy ak-tualną częstotliwością a częstotliwością spoczynkową informuje o wartości przyspieszenia. Stopień pobudze-

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
86
nia bioelektrycznego komórek rzęsatych zlokalizowa-nych w osklepku (rys. 2) jest wprost proporcjonalny do kąta odchylenia osklepka od pozycji spoczynkowej. Podczas przedłużonego, przy stałej prędkości kątowej ruchu kanału, w wyniku występujących sił tarcia o ściany przewodu, tarcia wiskotycznego oraz oporu ela-stycznego osklepka, endolimfa w powolnym procesie osiąga kierunek i prędkość przemieszczania zgodne z przemieszczeniem kanału. Występowanie tego zjawiska umożliwia powrót osklepka do pozycji spoczynkowej, w efekcie dostarczając odczucia zanikania ruchu obroto-wego. Przyjmuje się zatem, że sygnał wyjściowy z re-ceptora może być określony przez powstałe w wyniku kątowego przyspieszenia kanału odkształcenie osklepka [13].
2.2. Narząd otolitowy Narząd otolitowy (rys. 2) składa się z dwóch recep-
torów: łagiewki i woreczka, występujących w obu na-rządach przedsionkowych. Łagiewka wykrywa przyspie-szenia w płaszczyźnie poziomej, woreczek natomiast w płaszczyźnie pionowej. Narządy otolitowe położone są u podstawy kanałów półkolistych (rys. 2).
W każdym narządzie otolitowym (łagiewce i wo-reczku) znajduje się struktura czuciowa zwana plamką, pokryta żelem, na którego powierzchni ułożone są kryształki fosforanu i węglanów wapnia, zwane ka-myczkami błędnikowymi (rys. 2, 4). W żelu otolitowym zanurzone są wypustki komórek włoskowatych. Układ kierunkowy komórek sensorycznych w plamce łagiewki i woreczka jest o wiele bardziej skomplikowany niż w osklepku KPK, co umożliwia wielokierunkowość pola-ryzacji, związaną z odbiorem wszystkich możliwych kombinacji ruchów translacyjnych głowy w przestrzeni. Pod wpływem przyspieszeń liniowych rzęski komórek zmysłowych plamek łagiewki i woreczka ulegają chwi-lowym odkształceniom
Akcelerometry liniowe, którymi są również narządy otolitowe, reagują podobnie zarówno na przyspieszenie bezwładności, jak i grawitacyjne (zasada równoważno-ści Einsteina). Zatem receptory te mogą mierzyć jedy-nie sumę tych przyspieszeń w postaci wypadkowego przyśpieszenia grawitacyjno-inercyjnego (gravitoinertial force, GIF), w następującym zapisie wektorowym:
agGIFrr
−= (1)
gdzie: gr – wektor przyspieszenia grawitacyjnego, a
r–
wektor przyspieszenia translacyjnego. . Sygnały czuciowe z narządów ototlitowych dostar-
czają zatem właściwie niejednoznacznych informacji, zwłaszcza gdy weźmie się pod uwagę, że rejestrowane przyspieszenie może być generowane zarówno ruchem translacyjnym (rys. 4b), jak i zmianą orientacji głowy
względem wektora przyspieszenia ziemskiego gr (rys.
4c).
Rys. 4. Schemat budowy i działania narządu otolitowego [11] a) narządu otolitowego w stanie spoczynku, b) reakcja na przyspieszenie w płaszczyźnie poziomej, c) reakcja na bodziec w postaci pochylenia głowy od pionu
grawitacyjnego
3. MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO
3.1. MODELE KANAŁÓW PÓŁKOLISTYCH
Teoria o przyspieszeniu kątowym indukującym siły
bezwładności, które wywołują przepływ endolimfy, została zaproponowana niezależnie przez Ernsta Ma-cha, Josefa Breuera i Cruma Browna pod koniec XIX wieku [12]. Jednak to nie oni opracowali model mate-matyczny opisujący ruch tego płynu. Prawdopodobnie pierwszą próbę matematycznego opisu przepływu endo-limfy w kanałach podjęli Gaede oraz Schmaltz [13]. Ich model jednak nie spotkał się z szerokim zainteresowa-niem, chociażby z powodu pominięcia w jego równa-niach obecności zarówno osklepka, jak i łagiewki. W uzasadnieniu tego faktu należy zwrócić uwagę na to, że w obecnym czasie nie było wiadomo, że osklepek wy-pełnia swoją powierzchnią cały przekrój bańki.
3.1.1. Model Steinhausena Pierwszy model KPK, używany w zmodyfikowanej
formie do dnia dzisiejszego, zaproponowany został przez Wilhelma Steinhausena [14], który przyjął zało-żenie, że kanał reaguje na przyspieszenia kątowe jak silnie tłumione wahadło skrętne (torsyjne). Na podsta-

RAFAŁ LEWKOWICZ
87
wie obserwacji przemieszczenia osklepka u szczupaka Steinhausen opracował model liniowy drugiego rzędu opisujący dynamiczne właściwości KPK. Matematyczne sformułowanie tej idei, które w literaturze zaczęło być znane jako „równania wahadła skrętnego”, autor zapi-sał w postaci zależności [14]:
)()()()( tJtQKtQCtQJ eee α&&&&& ⋅=⋅+⋅+⋅ (2)
gdzie:
eee QQQ ,, &&& – oznaczają odpowiednio przyspieszenie ką-
towe, prędkość kątowa i kąt przemieszczenia endolimfy względem ściany kanału, J – moment bezwładności endolimfy, C – współczynnik tłumienia wiskotycznego (oporu lepkiego) endolimfy, K – współczynnik siły sprężystości osklepka,
α&& – przyspieszenie kątowe kanału względem prze-
strzeni inercyjnej, wokół osi prostopadłej do płaszczy-zny kanału.
Steinhausen do budowy tego prostego modelu przy-
jął założenie, że kątowe przemieszczenie endolimfy jest wprost proporcjonalne do odchylenia kątowego osklep-ka.
3.1.2. Model van Egmonda, Groena i Jongkeesa
Opis matematyczny dynamiki osklepka zamieszczo-
ny w pracy Steinhausena [14], zostały szeroko rozwinię-ty po II Wojnie Światowej przez van Egmonda, Groena i Jongkeesa [15] na Uniwersytecie w Utrechcie. Wybrali oni do modelowania endolimfę, jako płyn charakteryzu-jący się lepkością oraz tłumieniem i sprężystością wprost proporcjonalną do jego kątowego przemieszcze-nia w kanale. Do budowy modelu KPK, którego model fizyczny przedstawiono na rys. 5, autorzy przyjęli na-stępujące założenia: a) błoniasta ściana kanału jest sztywna, b) endolimfa jest nieściśliwym płynem newtonow-
skim, o jednorodnej gęstości i lepkości zbliżonej do wody,
c) prędkość endolimfy względem ścianki kanału jest proporcjonalna do przyspieszenia kątowego głowy,
d) prędkość kątowa endolimfy wokół środka torusa jest równa prędkości kątowej osklepka względem środka jego podstawy,
e) przepływ endolimfy w kanale odbywa się zgodnie z prawem Hagena-Poiseuille’a dla prostej rury,
f) skutki oporu lepkiego osklepka oraz bezwładności endolimfy w bańce są pomijane.
Rys. 5. Schemat fizycznego modelu pojedynczego KPK [15]
Rozszerzony model van Egmonda i wsp. [15] opierał
się na równaniu (2) Steinhausena:
)()()()( ttQJ
KtQ
J
CtQ eee α&&&&& =⋅+⋅+ (3)
do którego dodano rozwinięcie w postaci opisu ruchu endolimfy.
Do rozwiązania równania różniczkowego (3) zasto-sowano metodę transformaty operatorowej Laplace’a. Dla wymuszenia w postaci prędkości kątowej głowy α&
wyprowadzono transmitancję:
( )( ) ( ) ( )1
2
1
1
−− ⋅ τ+sτ+s
s=
s
sQe
α& (4)
w której wielomian charakterystyczny mianownika prawej strony równania posiada dwa miejsca zerowe:
⋅⋅−±⋅
⋅
−−
2
1
2
1
1
411
2,
C
JK
J
C=ττ (5)
Dla silnie tłumionego układu, jakim jest KPK
(średnica kanału około 0,3 mm), przyjmując właści-wość 4⋅K⋅J << C2, dokonano rozwinięcia równania (5) w szereg Taylora dla małych wartości 4⋅K⋅J⋅C-2, otrzy-mując dwie graniczne częstotliwości modelowanego układu:
C
Kτ ≈−1
1
J
Cτ ≈−1
2 (6)
Po przekształceniu, zależności (6) opisują dwie charak-terystyczne stałe czasowe: τ1 – definiująca powolny ruch osklepka, powracającego po odkształceniu do położenia pierwotnego, zwana długą stałą czasową:
K
Cτ ≈1
(7)
τ2 – opisująca szybki ruchu płynu w kanale, zwana krótką stałą czasową:

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
88
C
Jτ ≈2
(8)
Podstawiając stałe czasowe (7), (8) do równania transmitancji (4), zależność opisującą model dynamiki KPK sprowadzono do postaci:
( )( ) ( ) ( )11 21 +sτ+sτ
sK=
s
sQ KPKe
⋅⋅⋅
⋅
α& (9)
gdzie: KKPK – współczynnik charakteryzujący wrażli-wość endolimfy na przemieszczenie pod wpływem przy-spieszenia kątowego, uwzględnia iloczyn stałych czaso-wych τ1 i τ2 [ips/°/s2].
3.1.3. Model Steera Punktem wyjścia w dotychczasowych analizach teo-
retycznych dynamiki KPK był model wahadła skrętne-go [14–16], natomiast Robert Steer w swojej pracy [17] wyprowadził równanie dynamiki kanału w postaci rów-nania Naviera-Stokesa. Autor, stosując transformację Laplace’a, opisał średnią prędkość
eV przepływu endo-
limfy w kanale bez obecności osklepka:
( ) ( ) ( )
⋅⋅−⋅⋅⋅
⋅
⋅ −
Rπ
sΔPsαRρ
+s
=sV ee2
1200
1
103.33
&& (10)
gdzie: ρe – gęstość endolimfy, R – duży promień kanału (torusa),
α&& – przyspieszenie kątowe kanału,
∆P – różnica ciśnień po obu stronach osklepka. W dalszej kolejności Steer [17] uwzględnił wpływ
ruchu endolimfy na dynamikę osklepka. Do obliczeń przyjął, że pod wpływem zmiany prędkości kątowej kanału, przyspieszenie endolimfy wytwarza gradient ciśnienia, oddziałujący na osklepek momentem:
ΔPBπ=M P ⋅⋅ 3 (11)
gdzie: B – promień przekroju poprzecznego osklepka, ∆P – różnica ciśnień po obu stronach osklepka.
Osklepek w reakcji przeciwstawia się swoim momentem bezwładności:
αJ=M I&&⋅ (12)
gdzie: J – moment bezwładności osklepka i endolimfy,
α&& – przyspieszenie kątowe kanału.
Przyjmując powyższe założenia, Steer wyprowadził równanie dynamiki KPK postaci [17]:
( ) ( ) ( ) ( )tQK+tQC+tQJ=MM eeeIP ⋅⋅⋅− &&& (13)
gdzie: C – współczynnik oporu lepkiego endolimfy, K – współczynnik sztywności osklepka.
Uwzględniając wpływy oporu lepkiego endolimfy w kanale oraz bezwładność, opór i sprężystość osklepka, autor stworzył model dynamiki kanału KPK opisany zależnością:
( )( )
d
dd
ed
e
DK+s+BRπ
CD+s
BRπ
J+D+τ
BRπ
JRρD
=sα
sQ
⋅⋅
⋅⋅⋅
⋅⋅
⋅⋅⋅
⋅⋅⋅−⋅⋅
122
2
32
2
321
32
&&
(14)
gdzie: ρe – gęstość endolimfy, R – duży promień kanału (torusa), B – promień przekroju poprzecznego osklepka, Dd – współczynnik wzmocnienia wyznaczany z za-leżności:
e
dμ
r=D
⋅8
2
(15)
3.1.4. Model van Buskirka Podobną metodę modelowania zastosowali van Bu-
skirk i wsp. [13], którzy na podstawie modelu Stein-hausena (2), wyprowadzili równania dla przepływu osiowosymetrycznego w wąskiej części kanału, bezpo-średnio z równań Naviera-Stokesa. Na potrzeby badań autorzy wprowadził uproszczenia w modelu fizycznym kanału, przyjmując jego topologię w kształcie torusa, o parametrach przedstawionych na rys. 6. Wąska część kanału obejmuje kąt β i ma stały okrągły przekrój poprzeczny o promieniu r, który jest znacznie mniejszy, niż główny promień torusa R. Łagiewka rozciąga się w obszarze zakreślonym przez kąt γ.

RAFAŁ LEWKOWICZ
89
Rys. 6. Model fizyczny kanału półkolistego van Buskirka [13]
Równanie modelu (16), opisujące profil prędkości
przepływu endolimfy w kierunku osiowym, opracowano [13] przy założeniu, że ściana KPK jest ciałem sztyw-nym, natomiast endolimfa jest nieściśliwym płynem newtonowskim. Dla wąskiej części KPK składnik osio-wy równania Naviera-Stokesa przyjmuje formę (16), w której pominięty został wpływ krzywizny kanału, przy R >> r.
∂
∂⋅⋅
∂
∂⋅+
∂
∂⋅−=⋅
∂
∂
r
ur
rrz
pR+
t
u eν
ρα
1&& (16)
W powyższym równaniu α&& jest przyspieszeniem
kątowym kanału, ρe jest gęstością endolimfy, p jej ci-śnieniem, a νe lepkością kinematyczną. Zmienna r oznacza promień przekroju poprzecznego kanału, na-tomiast z jest współrzędną osiową walcowego układu współrzędnych o początku w osi torusa. Parametr u oznacza prędkość endolimfy w kierunku osiowym względem ściany kanału.
Van Buskirk, wprowadzając transformatę Laplace’a dla kątowego przemieszczenia endolimfy Qe, względem kanału, pod wpływem przyspieszenia kątowego α&& ka-
nału, wyprowadził transmitancję w postaci [13]:
( )( )
( )( ) ( )1
2
1
1
2
1//14−− ⋅
⋅⋅−
τ+sτ+s
λsβγ+=
s
sQe
α&& (17)
gdzie: τ1, τ2 – długa i krótka stała czasowa, λ1 – pierwiastek funkcji Bessela pierwszego rodza-ju, zerowego rzędu, β – kąt wyznaczony przez kanał (rys. 6), γ – kąt wyznaczony przez łagiewkę (rys. 6).
3.1.5. Model Omana Z badań Omana i wsp. [18] pochodzi dwu-
segmentowy model, uwzględniający wpływ kanału o eliptycznym przekroju na opór przepływu Hagena-Poiseuille’a. Autorzy rozszerzają model van Egmonda i wsp. [15] do postaci, w której wartość, kształt i krzywi-zna kanału zmienia się w sposób ciągły przez przewód, łagiewkę i bańkę, tworząc kanał o niestałym i nieokrą-głym przekroju poprzecznym. Wyprowadzili oni ponad-to równanie różniczkowe drugiego rzędu z trzema współczynnikami, w przeciwieństwie do równania wa-hadła skrętnego (2), które ma jedynie dwa współczyn-niki. Autorzy do badań wykorzystali transmitancję opisującą średnią prędkość
eV przemieszczenia endo-
limfy pod wpływem przyspieszenia kątowego α&& głowy:
( )( )
( ) ( )11
18
/2
21
2
2
+sτ+sτ
K
+sA
S
K
Lμπ+s
A
l
K
Lρ
KΛρ=
sα
sV
KPK
r
e
r
e
ee
⋅⋅⋅≅
⋅
⋅
⋅⋅⋅⋅
⋅
⋅
⋅⋅−
&&
(18)
gdzie: ρe i μe – są odpowiednio gęstością i lepkością dyna-miczną endolimfy, L – długość środkowej linii opływowej torusa, K – współczynnik sztywności osklepka, Λ& –&pole powierzchni rzutu centralnej linii opły-wowej torusa na płaszczyznę kanału, Ar – powierzchnia przekroju poprzecznego kanału,
S – współczynnik kształtu ściany,
l – współczynnik długości środkowej linii opły-
wowej, KKPK – współczynnik wrażliwości endolimfy na prze-mieszczenie pod wpływem przyspieszenia kątowego.
3.1.6. Kolejne rozwinięcia jednowymiarowego modelu dynamiki kanału półkolistego
W kolejnych latach badań nad fizjologią NP oraz
prac w zakresie modelowania jego zachowania, Rabbitt i Damiano [19] wprowadził trójwymiarowy opis KPK, wykazując asymptotyczne rozwiązanie dla pola prze-pływu w obrębie bańki [20]. Autorzy przeprowadzili obliczenia dla przepływu cieczy w pobliżu strefy osklepka [20], oraz przepływu płynu przez porowaty osklepek [21], w przeciwieństwie do przyjmowanego dotychczas profilu przepływu wg prawa Hagena-Poiseuille’a. Wynikiem tych prac był model narządu dla dużych przyspieszeń kątowych. Autorzy tych prac [20,21] wykazali, że dynamika endolimfy jest zdomino-wana przez przepływ laminarny w wąskiej części kana-

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
90
łu. Jest to ważny wniosek uzasadniający przyjęte uproszczenia w modelu van Buskirka, w postaci prze-pływu endolimfy jedynie w wąskiej części kanału, przy założeniu stałego, kołowego jego przekroju poprzeczne-go.
W 2000 roku Mingyu i Wenchang zaprezentowali w swojej pracy [22] rozwiązania analityczne o dużej do-kładności z modelem KPK van Buskirka (17), opisując dynamikę płynu w pojedynczym KPK. Rozwiązanie obejmuje trzy rodzaje odpowiedzi na zastosowanie wymuszenia oraz zawiera wszystkie wyniki van Buskir-ka i wsp. [13]. Autorzy pracy [22] wskazują na uzyska-ną większą zgodność wyników własnych obliczeń nume-rycznych z danymi pochodzącymi z obserwacji ekspe-rymentalnych, w porównaniu z poziomem zgodności uzyskanym przez zespół van Buskirka [13]. Badania przeprowadzono dla pojedynczego kanału, nie uwzględ-niając interakcji między trzema KPK.
3.1.7. Model dynamiki układu kanałów półkolistych
Mechanika układu dwóch KPK została szeroko opi-
sana w pracach [23–26], w których autorzy analizowali skutki hydrodynamicznego ich połączenia. Natomiast Ifediba i wsp. [27] użyli wyników Damiana i Rabbitta [20] w celu wyprowadzenia równań przepływu endolim-fy i wykonania badań symulacyjnych biomechaniki pełnego 3-kanałowego NP.
W roku 2009 Rabbitt i wsp. opublikowali wyniki badań [12,18], do których wykorzystali prosty model mechaniki płynu w kanale, następnie zmodyfikowany [21], w zakresie umożliwiającym analizę przepływu endolimfy przez osklepek. Wartość przemieszczenia endolimfy Qe opisali równaniem różniczkowym drugiego rzędu [21]:
Pf=dt
dQC+
dt
Qdm ee
e ∆−⋅⋅⋅ α&&2
2
(19)
gdzie: me – masa endolimfy,
α&& – przyspieszenie kątowe głowy,
P∆ – różnica ciśnienia po obu stronach osklepka. f – współczynnik związany z przyspieszeniem bezwładnej masy endolimfy, wyznaczany z zależności:
( )ϑcos2
2 ⋅⋅⋅⋅ Rρπ=f e (20)
dla której: ρe – gęstość endolimfy, R – promień krzywizny toroidalnego kanału, ϑ – kąt zawarty między płaszczyzną obrotu, a płaszczyzną kanału.
Kolejne rozwiązanie opisu układu trzech KPK za-proponował Obrist [28], opierając swoje badania na modelu opracowanym przez van Buskirka i wsp. [13]. Obrist analizował widma wartości własnej modelu i użył rozszerzonej jego wersji, wyprowadzając wyrażenie na przemieszczenie osklepka w funkcji ruchu kątowego głowy. Szerszy przegląd prac badawczych z zakresu biomechaniki KPK można znaleźć w pracy Rabbitta i wsp. [12].
Podsumowując powyższą charakterystykę modeli
KPK, można stwierdzić, że dynamika płynu w KPK jest kluczem do prawidłowego funkcjonowania tego receptora ruchu kątowego głowy. Celem większości badań KPK było wykazanie, w jakich warunkach przemieszczenie osklepka jest wprost proporcjonalne do prędkości kątowej głowy. W tym celu mierzono między innymi prędkość oczopląsu. Grossman i wsp. [29] stwierdzili, że prędkość oczopląsu w przybliżeniu jest wprost proporcjonalna do prędkości kątowej oscylacyj-nych ruchów głowy w płaszczyznach poziomej i piono-wej, o częstotliwości z zakresu 0,5 – 5 Hz. Zakres ten obejmuje częstotliwości występujące podczas natural-nych ruchów głowy w życiu codziennym człowieka [30].
3.2. METODY WYZNACZANIA STAŁYCH CZASOWYCH
Większość z przeprowadzonych dotychczas badań w
zakresie modelowania KPK dotyczyła obliczeń wartości parametrów modelu, tj. współczynników i tzw. stałych czasowych. Zarówno na podstawie parametrów fizycz-nych (właściwości fizyczne endolimfy, geometria kana-łów, itp.), jak i subiektywnych ocen osób uzyskiwanych w badaniach doświadczalnych, starano się uzyskać możliwie wysoką zgodność wyników własnych obliczeń numerycznych z danymi pochodzącymi z obserwacji eksperymentalnych.
3.2.1. Metoda analityczna Według van Egmonda i wsp. [15] znajomość para-
metrów anatomicznych KPK jest wystarczająca do wyznaczenia krótkiej stałej czasowej τ2 (8). Moment bezwładności J endolimfy wypełniającej kanał wraz z jego częścią w obszarze łagiewki (rys. 4) można przed-stawić za pomocą równania:
322
2 Rrπρ=J e ⋅⋅⋅⋅ (21)
gdzie: R – promieniem kanału półkolistego (torusa), r – promień przekroju poprzecznego kanału, ρe – gęstość endolimfy.

RAFAŁ LEWKOWICZ
91
Współczynnik tarcia lepkiego C autorzy wyznaczyli na podstawie prawa Hagena-Poiseuille’a. Przyjmując, że tarcie odbywa się w kanale, a nie obszarze łagiewki (tłumienie w kanale zostało określone dla połowy dłu-gości obwód koła zakreślonego przez kanał), van Eg-mond i wsp. [15] wyprowadzili równanie opisujące współczynnik oporu lepkiego endolimfy:
32
8 Rπμ=C e ⋅⋅⋅ (22)
Opierając się na zależnościach (21) i (22), wyznaczono równanie krótkiej stałej czasowej:
2
1
2
4
rρ
μ=
J
C
e
e
⋅
⋅≈−τ (23)
która dla: a) gęstości endolimfy ρe = 1,0 kg/m3, b) lepkości dynamicznej endolimfy μe = 0,6 mPa⋅s w
temperaturze 37 ºC, c) promienia kanału r = 0,03 cm, w przybliżeniu wynosi: τ2 ≈ 0,037 s.
Steer [17], wykorzystując model fizyczny osklepka, bańki i kanału, wyznaczył w przybliżeniu moment bezwładności J osklepka oraz endolimfy, a także współczynnik C oporu lepkiego z poniższych zależności:
eρBπ=J ⋅⋅⋅ 5
2
7 (24)
oraz
ΔB
Bψμπ=C e
4
15 ⋅⋅⋅⋅ (25)
w których zmienne zaznaczają: ρe – gęstość endolimfy, μe – współczynniki lepkości kinematycznej endo-limfy, ψ1 – wartość kąta, jaki zajmuje w obwodzie torusa osklepek, ∆B – prześwit między osklepkiem na wewnętrzną ścianą bańki, B – powierzchnia przekroju poprzecznego osklepka prześwit między osklepkiem na wewnętrzną ścianą bańki.
Van Buskirk i wsp. [13] wyprowadzili równanie na
krótką stałą czasową τ2 według zależności:
eνλ
r=τ
⋅2
1
2
2 (26)
gdzie: r – promień przekroju poprzecznego kanału, λ1 – pierwiastek funkcji Bessela pierwszego rodza-ju, zerowego rzędu,
νe – współczynnika lepkości kinematycznej.
Oman i wsp. [18] dla równania dynamiki osklepka (20), wprowadzając oznaczenie lepkości kinematycznej endolimfy
eee ρμ=ν / , wyznaczyli stałe czasowe z za-
leżności:
⋅
⋅⋅⋅≈−
2
1
1
8
r
e
A
S
K
Lμπ=
C
Kτ (27)
oraz
⋅⋅⋅
−
2
1
2
8
r
e
r
A
Sνπ
A
l
=τ (28)
Selva [31] stwierdził, że przyjmując długą stałą cza-
sową τ1 kanału półkolistego człowieka o wartości bli-skiej stałej czasowej małpy z gatunku Saimiri, możliwe jest wyznaczenie zarówno współczynnika K, jak i wzmocnienia KKPK modelu Omana (18). Zatem powią-zanie współczynnika K oraz wzmocnienia KKPK z długą stałą czasową τ1 opisują równania:
3
2
1
/ 6.88
mGPaA
S
τ
Lμπ=K
r
e ≈
⋅
⋅⋅⋅ (29)
oraz
2311
1 101.85 smγ
XAτ=K o
oKPK
−⋅≈⋅⋅ (30)
gdzie:
oA – powierzchnia przekroju bańki zajęta przez
osklepek, wynosząca 1,04 mm2 [6],
oX – średnie przemieszczenie powierzchni osklepka
na jednostkę przyspieszenia kątowego głowy, wynoszące 0,026 μm/deg/s [18].
Curthoys i wsp. [6] oraz Oman i wsp. [18], na pod-
stawie danych anatomicznych, oszacowali krótką stałą czasową τ2, w przybliżeniu równą 4 ms. Wartość ta jest o dwa rzędy wielkości mniejsza w porównaniu z warto-ściami z dotychczasowych wyników badań [15]. Można to uzasadnić tym, że wartości te określono na podsta-wie subiektywnej oceny odczucia obrotu, bądź analizy indukowanego oczopląsu przedsionkowego.
Rabbitt i wsp. [12,32], przyjmując, że przeciek en-dolimfy wokół odchylonego osklepka reguluje przepływ Stokesa, wyprowadzili zależności na długą τ1 (31) i krótką τ2 (32) stałą czasową:
ΓKC+K
ΓKm+Cτ e
/
/1
⋅
⋅≈ (31)
ΓKm+C
mτ
e
e
/2
⋅≈ (32)
gdzie: Γ – hydrauliczny opór Stokesa, związany z powstającą szczeliną pomiędzy osklepkiem, a ścianą bańki,

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
92
me – masa endolimfy opisana równaniem:
r
e
eA
lρm
⋅≈ (33)
C – współczynnik tłumienia wiskotycznego endolimfy:
2
8
r
e
A
lμπC
⋅⋅⋅≈ (34)
dla którego: l – długość wąskiej części kanału o promieniu r, mierzona wzdłuż środkowej linii opływowej,
rA – powierzchnia przekroju poprzecznego
wąskiego odcinka kanału 2rπ=A
r⋅ ,
K – współczynnik siły sprężystości, określony w przybliżeniu zależnością:
2
8
o
c
A
hKπK
⋅⋅⋅≈ (35)
dla którego: Kc – sztywność ścianki osklepka,
h – grubość osklepka, Ao – powierzchnia przekroju bańki zajęta
przez osklepek. Stałe czasowe τ1 (31) i τ2 (32) redukuje się do po-
staci stałych (7), (8) modelu standardowego w przy-padku, gdy hydrauliczny opór zapobiegający przecie-kom endolimfy wokół odchylonego osklepka staje się duży (Γ → ∞).
Prawie wszystkie oszacowania współczynnika
sztywności osklepka K pochodzą z przeprowadzonych obliczeń z zastosowaniem różnych modeli matematycz-nych układu osklepek-endolimfa. W tabeli 1 zamiesz-czono oszacowane na podstawie teoretycznych związ-ków z długą stałą czasową τ1 wartości współczynnika K oraz ich wartości wskazane przez poszczególnych autorów.
Tab. 1. Wartości współczynnika objętościowo – ciśnieniowego oraz jego związek z długą stałą czasową [31]
Autor Długa stała
czasowa Współczynnik K
[GPa/m3] Komentarz
van Buskirk [33] Kr
Rμ=τ e
⋅
⋅⋅41
8 K ≈ 2,5 dla τ1 = 17 s
Sztywny kanał, o toroidalnym kształcie i stałym przekroju poprzecznym, zajmującym 180° obwodu.
van Buskirk [13] Krπ
Rβμ=τ e
⋅⋅
⋅⋅⋅41
8 K ≈ 2,2 dla τ1 = 21 s
Sztywny kanał, o toroidalnym kształcie i stałym przekroju poprzecznym, zajmującym 250° obwodu.
Oman i wsp. [18]
λK
Lμπ=τ e ⋅
⋅⋅⋅81
K ≈ 6,8 dla τ1 = 6 s [34]
Sztywny kanał długości L o zmiennym przekroju poprzecznym, uwzględniony w parametrze λ.
Squires i wsp. [35] Krπ
Rβμ=τ e
⋅⋅
⋅⋅⋅41
8 K ≈ 13 dla τ1 = 4,2 s
Wartość podobną uzyskał van Buskirka [13] dla innych wartości stałych czasowych.
Rabbitt i wsp. [12] 2
2
1
dc
re
AhK
ALμ=τ
⋅⋅
⋅⋅ 1,338
2≈
⋅⋅⋅≈
o
c
A
hKπK
dla τ1 = 13,3 s
Wartości parametrów oparte na danych morfologicznych.
3.2.2. Metoda doświadczalna Liczne eksperymenty, podejmowane w celu określe-
nia parametrów modelu KPK, zostały oparte na su-biektywnej ocenie badanej osoby. Dla przykładu, van Egmond i wsp. [15] wyznaczyli stałe czasowe modelu na podstawie uzyskanych odpowiedzi werbalnych osób poddawanych różnym bodźcom ruchowym w obracają-cym się fotelu. Autorzy stwierdzili ponadto, że długa τ1 stała czasowa boraz krótka τ2 stała czasowa były zbli-żone odpowiednio do 10 s i 0,1 s. W innych badaniach [36], dla stopniowych zmiany prędkości obrotowej war-tość długiej stałej czasowej τ1 = 16 s określono w opar-ciu o analizę oczopląsu. Mayne [37] wyznaczył stałą czasową τ1 przy użyciu złudzenia dźwiękowo-obrotowego, uzyskując wartości z zakresu od 8 do 11 s. Jak później wykazał w swojej pracy Young [38], wystę-pujące różnice pomiędzy wynikami tych obliczeń zwią-zane były z procesami adaptacyjnymi, które są bardziej
aktywne w torze subiektywnej oceny w porównaniu z odpowiednimi procesami związanymi z oczopląsem.
Fernandez i wsp. [39] dokonali oszacowania długiej stałej czasowej τ1 = 5,7 s przeprowadzając rejestrację charakterystyk obwodowych sygnałów czuciowych z NP małpy, w ramach stymulacji przyspieszeniami kątowy-mi o różnych amplitudach i częstotliwościach.
Dokładne oszacowanie długiej stałej czasowej τ1, na podstawie subiektywnej reakcji człowieka jest bardzo trudne, gdyż obarczone jest wpływem procesów ner-wowych. Zakładając, że żaden proces neuronowy nie uczestniczy w reakcji VOR, Schmidt i wsp. [40] wyzna-czyli długą stałą czasową równą 18 s, co jest wynikiem zgodnym z publikacjami innych badaczy [34,41].

RAFAŁ LEWKOWICZ
93
3.3. MODELE NARZĄDÓW OTOLITOWYCH
Podobnie jak dla KPK, pierwsze modele dotyczące
dynamiki narządów otolitowych były oparte na subiek-tywnych odpowiedziach badanych osób. Meiry [42] prawdopodobnie jako pierwszy zbadał subiektywną reakcję na ruch liniowy, wykorzystując do tego celu wózek wykonujący wzdłużny, zmienny ruch sinusoidal-nie. Na podstawie subiektywnego wskazania kierunku, autor uzyskał związek wiążący postrzeganą prędkość liniową z bodźcem stymulującym. Young i Meiry [43] stwierdzili wówczas, że zaproponowany model popraw-nie przewiduje fazę postrzeganej prędkości dla drgań poprzecznych, ale nie jest w stanie przewidzieć reakcji narządu otolitowego dla stałego kąta pochylenia.
Dziesięć lat później Zacharias [44] zauważył, że model ruchu warstwy kamyków błędnikowych o para-metrach skupionych może być użyty do reprezentowa-nia dynamiki narządu otolitowego, podobnie do modelu wahadła skrętnego wykorzystywanego do opisu dyna-miki KPK. Ormsby [41] jako pierwszy opracował model oparty na właściwościach masowo-sprężystych układu, który w kolejnych latach był udoskonalany przez Gran-ta i Besta [45,46]. Autorzy w swojej pracy [45,46] uwzględnili w modelu fizycznym narządu galaretowatą warstwę zawierającą zakończenia komórek rzęsatych, na powierzchni której rozmieszczona jest warstwa ka-myków błędnikowych (rys. 2, 4).
Grant i Cotton [47] zaproponowali wprowadzenie do modelu dodatkowego tłumienia pochodzącego od odkształcenia lepkosprężystej galaretowatej warstwy narządu. Autorzy do budowy modelu przyjęli warstwę kamyków błędnikowych w postaci sztywnej, stałej ma-sy, warstwę żelu jako izotropowy materiał lepkospręży-sty, a endolimfę jako płyn newtonowski o jednorodnej lepkości. Stosując drugą zasady dynamiki Newtona w płaszczyźnie warstwy kamyków błędnikowych Grant i Cotton [47] wyprowadzili następujące równanie dyna-miki dla modelu narządu otolitowego:
( )( ) ( ) ( )sτ+sτ+
ττ
ρ
ρ=
sGIF
sx
otooto
otooto
oto
e
⋅⋅⋅
⋅⋅
−
21
21
111 (36)
gdzie: x – przemieszczenie warstwy kamyków błędniko-wych względem układu kostnego (głowy), GIF – przyspieszenie grawitacyjno-inercyjne (1), ρe – gęstość endolimfy, ρoto – gęstość warstwy kamyków błędnikowych, τ1 oto,τ2 oto – odpowiednio długa i krótka stała czasową, które charakteryzują właściwości tłumiące i sprężystość żelowej warstwy narządu.
Jak zauważył Rabbitt i wsp. [12], dla spełnionej za-leżności ρoto > ρe podczas stymulacji przyspieszeniem
liniowym pojawia się siła bezwładności odpowiedzialna za przemieszczenie kamyków błędnikowych względem głowy. Stałe czasowe dla ruchu liniowego są analogiczne do stałych modelu KPK, jednakże są one przesunięte względem fizjologicznych skal czasowych ruchu kątowe-go głowy. Oznacza to, że KPK narażone są na szeroki zakres bodźców w postaci ruchu kątowego głowy, dla częstotliwości między tymi dwoma charakterystycznymi stałymi czasowymi τ1 i τ2, podczas gdy narząd otolito-wy doznaje dodatkowych bodźców o niskiej częstotli-wości, wynikających przede wszystkim z powolnych wychyleń głowy względem wektora grawitacji. Podob-nie jak w przypadku KPK, narząd otolitowy okazuje się być bardzo silnie tłumionym układem [48].
Prace Fernandeza i Goldberga [49] prawdopodobnie stanowią najbardziej kompleksowe i dokładne badania charakterystyk fizjologii systemu otolitowego u ssaków. Autorzy scharakteryzowali odpowiedzi częstotliwościo-we narządu za pomocą funkcji przenoszenia w dziedzi-nie „s” operatora Laplace'a w postaci:
( ) ( )sτ+
sτk+
sτ+
sτk+=sH
o
wk
ww
Aoto
Aotoa
⋅
⋅⋅⋅
⋅
⋅⋅
1
1
1
1 (37)
gdzie: ka – wzmocnienie adaptacji, kw – wzmocnienie wrażliwości, τA oto – stała czasowa adaptacji narządu otolitowego, τo – stała czasowa opóźnienia, τw – stała czasowa wrażliwości, które po uogólnieniu przyjmują formę zależności:
( ) ( )( )( )sH
sHsH=sH
M
v
a ⋅ (38)
Operator Ha(s) jest operatorem adaptacji, reprezen-
tującym fazę niskich częstotliwości i wzrostu wzmoc-nienia od statycznego stanu układu do 0,006 Hz. Wy-rażenie Hv(s) jest operatorem wrażliwościowym prędko-ści z ułamkowym wykładnikiem (kv < 1). Ostatni człon HM(s) jest operatorem opóźnienia pierwszego rzędu, który według Fernandeza i Goldberga [49] odzwiercie-dla mechanikę ruchu kamyków błędnikowych. Pomimo że transmitancja (44) zapewnia odpowiednią reprezen-tację dynamiki narządu otolitowego, Hosman [50] za-uważył, że model ten nie jest łatwy do zastosowania ze względu na ułamkowy wykładnik w członie Hv(s). W związku z tym, zaproponował uproszczony model, opracowany w tej samej formie przez Granta i Besta [45], który został następnie udoskonalony przez Telba-na i Cardulla [51]. Wyprowadzili oni transmitancję (46) wiążącą dynamikę impulsów czuciowych (Afferent Fi-ring Rate, AFR) narządu otolitowego z przyspiesze-niem grawitacyjno-inercyjnym GIF w postaci:

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
94
( )( ) ( ) ( )10,016s15s
110s33,3
++
+=
sGIF
sAFR
⋅⋅ (39)
Analiza porównawcza odpowiedzi skokowej powyż-
szego modelu (46) z modelem opisanym zależnością Fernandeza i Goldberga (44) wykazała, że oba modele są w dobrej zgodności.
Wartości liczbowe podstawowych parametrów fi-
zycznych i geometrycznych KPK i narządu otolitowego zamieszczono w tabeli 2.
Tab. 2. Parametry geometryczne i fizyczne receptorów NP
Parameter Symbol Wartość Autor Źródło
Promień torusa R 3,2 ⋅ 10−3 m Curthoys i Oman
[6] Promień kanału r 1,6 ⋅ 10−4 m
Średni promień w obszarze bańki b 6,8 ⋅ 10−4 m Kąt zakreślony przez kanał β 4,4 rad van Buskirk i
wsp. [13]
Kąt zakreślony przez łagiewkę γ 1,32 rad
Gęstość endolimfy ρe 103 kg/m3
Bronzino [52] Lepkość kinematyczna endolimfy νe 10−6 m2/s
Lepkość dynamiczna endolimfy μe 0,01 g/cm/s
Gęstość kamyków błędnikowych ρoto 2,7 ⋅ 103 kg/m3
3.4 MODELE ZJAWISK FIZJOLO-GICZNYCH TOWARZYSZĄCYCH POBUDZENIOM NARZĄDU PRZEDSIONKOWEGO
3.4.1 Zjawisko adaptacji
Badania Goldberga i Fernandeza [34] nad funkcjo-nowaniem sygnałów czuciowych NP u małp wykazały, że używany przez wielu badaczy model wahadła skręt-nego nie jest wystarczający do opisu dynamiki osklepka dla przedłużonej stymulacji bodźcem obrotowym. W tym przypadku aktywność neuronów jest znacznie mniejsza niż w odpowiedzi uzyskanej jedynie z modelu mechanicznego wahadła. Schmid, Stefanelli i Mire [40] obliczyli wartość długiej stałej czasowej τ1 dla modelu dymniki wzrokowo-przedsionkowej, który zawierał opis procesu adaptacji w postaci wyrażenia:
( )( ) 1+sτ
sτ=
s
sAFR
A
A
adapt
adapt
⋅
⋅
α& (40)
Dla zarejestrowanego oczopląsu, autorzy znaleźli naj-lepsze dopasowanie modelu dla wartości τA = 61,1 s i τ1 = 18,2 s. Również Young i Oman [38] opisali to zja-wisko poprzez dodanie do opisu dynamiki KPK opera-tora adaptacji (40), dla stałej czasu adaptacji w torze subiektywnej odpowiedzi τA = 30 s oraz dla odpowiedzi w postaci oczopląsu τA = 120 s. Występowanie zatem neuronowej adaptacji może być zamodelowane jako dodatkowy, pierwszego rzędu filtr dolnoprzepustowy
(40) o stałej czasowej τA = 80 s [53]. Przeprowadzona analiza oczopląsu oraz subiektyw-
nej percepcji ruchu obrotowego wykazała potrzebę uwzględnienia w modelu KPK oprócz operatora adap-tacji również współczynnika wrażliwości. Nashner [54,55] w badaniu ludzkiej kontroli postawy, stwierdził, że w celu przewidywania czasu reakcji osoby poddanej bodźcom o wysokim impulsie, konieczne jest włączenie do równania dynamiki KPK niewielkiego członu do-prowadzającego pierwszego rzędu w formie:
( )( )
1+sτ=s
sAFRL
dopr
dopr⋅
α& (41)
gdzie: τL – stała czasowa członu doprowadzającego, przyjmująca wartość 0,017 s.
Podobnych obserwacji dokonał Benson [56] podczas
analizy rejestracji oczopląsu indukowanego sinusoidal-nym bodźcem obrotowym o częstotliwości z zakresu od 0,01 Hz do 5 Hz. Wzrost współczynnika amplitudy oczopląsu związał z członem doprowadzającym o stałej czasowej τL = 0,06 s.
Do podobnych wniosków doszli w badaniach narzą-du otolitowego Young i Meiry [43], którzy w celu lep-szego dopasowania wyników eksperymentalnych włą-czyli do modelu tego receptora człon doprowadzający tzw. neuronowego przetwarzania ze stałą czasową τL oto postaci:
( )( )
1+sτ=sGIF
sAFRLoto
dopr
dopr ⋅ (42)

RAFAŁ LEWKOWICZ
95
3.4.2 Próg percepcji Według Bonnie [57], próg pobudzenia narządu to minimalna ilość energii, która jest niezbędna, aby sty-mulować receptory czuciowe. Przegląd literatury pod względem stosowanych dotychczas metod wyznaczania progów percepcji w ruchu kątowym i liniowym przed-stawił w swojej pracy Akbari [58,59] oraz Venkatesana [60]. Najniższy opisany w literaturze próg THKPK od-czucia rotacji wokół osi pionowej wynosi 0,035 °/s2, jednak tak niski poziom czułości można osiągnąć jedy-nie przy obecności stałego przyspieszenia kątowego i długim czasie na odpowiedź rzędu 20 do 40 s. Po-wszechnie przyjmowanymi wartościami czułości KPK narządu przedsionkowego są przedstawione przez Gilin-ghama [61] wartości około 0,14 °/s2 dla odchylenia (ruch obrotowy wokół osi pionowej ciała), 0,5 °/s2 dla pochylenia oraz 0,5 °/s2 dla przechylenia. Często jed-nak dla opisania progów THKPK czułości KPK używa się iloczynu przyspieszenia kątowego oraz czasu w ja-kim ono działa. Iloczyn ten, zwany także w literaturze stałą Muldera, posiada dosyć stałą wartość dla kąto-wych bodźców przyspieszeniowych o czasie trwania do 5 s, dla bodźców bardziej długotrwałych stała ta zmniejsza się. Powszechnie przyjmuje się wartość stałej Muldera na poziomie 2 °/s.
Próg pobudliwości narządów otolitowych jest za-leżny od kierunku działania i wartości przyspieszenia. Minimalna wartość rejestrowanego progu percepcji dla przyspieszeń liniowych mieści się w przedziale od 0,00981 do 0,2943 m/s2. Próg odczucia dla przyspieszeń liniowych w kierunku poziomym wynosi 0,15 – 0,2 m/s2, w pionowym 0,12 – 0,15 m/s2. W warunkach eksperymentalnych Gurovskiy i wsp. [62] wykazali, że zmiana kierunku działania przyspieszenia przynajmniej o kąt 1,5 º jest rejestrowana przez narządy otolitowe. Próg percepcji dla przyspieszeń liniowych działających poniżej 5 s jest w przybliżeniu wartością stałą iloczynu przyspieszenia i czasu, lub prędkością liniową o warto-ści od 0,3 do 0,4 m/s.
3.4.3 Zjawisko habituacji
Habituacja oznacza zmniejszoną wrażliwość na po-wtarzany typ bodźca. Zatem wzrost progu pobudzenia, wynikający z powtarzanego bodźca, jest efektem habi-tuacji. Do tej pory niewiele uczyniono w zakresie mo-delowania tego zjawiska. Zmienna wartość progu wraż-liwości jest ściśle związana z naturą zachowań ludzi, która z kolei jest bardzo trudna do modelowania na podstawie zależności liniowych. Oman [63] wykazał między innymi, że habituacja nie jest zjawiskiem dwu-kierunkowy i jest związana z pamięcią na powtarzane ekspozycje o danym typie bodźca. Dla przykładu, w łyżwiarstwie figurowym prawie wszyscy łyżwiarze
tłumią uczucie obrotu podczas wirowania w obranym (przyzwyczajonym) kierunku, ale bardzo łatwo stają się oszołomieni, gdy obracają się w kierunku przeciw-nym.
3.4.4 Mechanizm przechowywania prędkości
Dotychczasowe rozważania na temat modelu reakcji
KPK na przyspieszenie kątowe dotyczyło jedynie mechanicznej odpowiedzi układu. Przetwarzanie sygnałów doprowadzających KPK następuje w pniu mózgu min. w procesie zwanym pamięcią prędkości (velocity storage) [35,64,65]. Pojęcie pamięci prędkości opiera się na następującym odkryciu eksperymentalnych. Jeżeli nagle zatrzymany zostanie przedłużony ruch obrotowy, pojawiające się kątowe przyspieszenie hamujące doprowadzi do powstania siły bezwładności endolimfy odkształcajacej osklepek. Powrót osklepka do stanu spoczynkowego (wyjściowego) następuje w czasie równym stałej czasowej, bliskiej 5 s. Jednakże, odczuwany obrót wynikający z hamowania przedłużonego obrotu trwa znacznie dłużej i zanika w czasie dłuższej stałej czasowej, zwykle do 15 do 20 s.
Proces habituacji NP oraz mechanizm przechowy-wania prędkości podlegają przetwarzaniu w OUN, w związku z czym nie zostały uwzględnione w przedsta-wionych modelach receptorów.
3.4.5 Próg percepcji Zjawiskiem restytucji przedsionkowej określa się
przebieg ustępowania lub, inaczej, proces wygaszania pobudzenia NP po jego stymulacji, np. bodźcem w postaci przyspieszenia kątowego. Okres restytucji może mieć różny przebieg i trwać różnie długo u poszczegól-nych osób. Przebiegu restytucji po ustalonych, typo-wych ekspozycjach na przyspieszenia kątowe może być wskaźnikiem zarówno indywidualnej pobudliwości na-rządu przedsionkowego, jak i zdolności adaptacyjnych ocenianych przebiegiem habituacji po powtarzanych ekspozycjach [66,67]. Może to świadczyć o tym, że ob-niżony zostaje próg pobudliwości na bodźce ruchowe [61], co też może być wprowadzone do modelu NP w postaci zmiennego w czasie progu percepcji THKPK i THOTO.
4. DYSKUSJA Model (2) wahadła skrętnego Steinhausena [14]
był punktem wyjścia do dalszych badań i analiz teore-tycznych dynamiki KPK. Większość z tych badań [15,16,18] opierała się na rozważaniach hydrodyna-

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
96
micznych. Porównując zależności (9) i (18) opisujące model dynamiki KPK można zauważyć, że transmitan-cja (18) reprezentująca model hydroelastyczny posiada konstrukcję analogiczną do prostszego modelu wahadła skrętnego (9). Jednakże za pomocą tego prostego mo-delu nie można opisać przemieszczenia osklepka i jego interakcji z endolimfą. Zaletą hydroelastycznego mode-lu jest to, że charakterystyczne stałe czasowe τ1, τ2 oraz współczynnik KKPK mogą być wyrażone jako funk-cje parametrów fizjologicznych, bez konieczności prze-prowadzania eksperymentów np. z subiektywną oceną ruchu. Pomimo takich ograniczeń wielu badaczy zga-dza się z poprawnością zamodelowania dynamiki KPK przez Steinhausena (2) jako układu silnie tłumionego z dwiema charakterystycznymi wielkościami stałych cza-sowych. Dlatego też, nawet jeśli stałe czasowe modelu nie są łatwe do zidentyfikowania, to matematyczny opis zaproponowany przez Steinhausena (2), pozostaje najbardziej popularnym narzędziem w analizie właści-wości dynamicznych KPK. Model ten, opisany trans-mitancją (9), ma postać filtru pasmowego, dla którego dolna częstotliwość odcięcia określona jest przez długą stałą czasową τ1
-1, natomiast górna częstotliwość przez krótką stałą czasową τ2
-1 [14,68]. Pomiędzy tymi dwie-ma granicznymi częstotliwościami τ1
-1 oraz τ2-1 model
przewiduje, że przemieszczająca się pod wpływem przyspieszenia kątowego głowy endolimfa wytwarza przemieszczenie osklepka wprost proporcjonalnie do prędkości kątowej głowy. Zauważył to Mayne [30,37], stwierdzając, że w danym zakresie prędkości kątowej głowy przemieszczenie endolimfy i osklepka są raczej miarą prędkości, a nie przyspieszenia kątowego.
Dopasowanie odpowiedzi modelu KPK z danymi badań eksperymentalnych odbywa się na podstawie doboru jego stałych czasowych. W tabeli 3 zestawiono wyznaczone wartości stałych czasowych modelu KPK dla kanału bocznego, wykorzystywane w badaniach symulacyjnych, weryfikujących poprawność odpowiedzi modelu receptora.
Różnice w wartości długiej stałej czasowej τ1 wy-nikają głównie z przyjętej metody jej wyznaczania. Dane w tabeli 3 wyraźnie wskazują, że wartości wyzna-czane na podstawie badania oczopląsu są wyższe od wartości otrzymanych z badań subiektywnej oceny ruchu (oznaczenie S). Na uzyskaną wartość tej stałej wpływa również rodzaj grupy osób objętych badaniem. Zaobserwował to już Groen [16], wykazując, że wartość stałej czasowej τ1 zależna jest od posiadanego przez osobę badaną doświadczenia na pobudzania kinetyczne NP, czego przykładem może być czynnie latający pilot.
Van Egmond i wsp. [15] wykazali ponadto, że wartość tej stałej jest zależna od liczby zastosowanych w ekspe-rymencie powtórzeń bodźca ruchu, a także jego przy-spieszenia i czasu trwania.
Tab. 3. Stałe czasowe modelu KPK (kanał boczny)
Autor Stała czasowa
Źródło τ1 τ2
Steinhausen 4,2 0,01 [69]
van Egmond, Groen i Jongkees
17 10*
0.037 0,1 S
[15]
Mayne 11 0,09 [37]
Meiry 8 10 S
0,4 0,1 S
[63] [42]
Steer 10 0,005 [17] van Buskirk 17 0,003 [33]
Benson 17,8 bd [56]
Oman i wsp. 16 0,04 [63]
Fernandez i Goldberg
5,7 0,003 [39]
Hosman 5,9 S 0,005 [70] Squires i wsp. 4,2 0,006 [35]
Rabbitt i wsp. 13,3 0,006 [12] S – wartość wyznaczona na podstawie subiektywnej oceny bd – brak danych
Warto wspomnieć, że zarówno subiektywna ocena
jak i oczopląs są jedynie konsekwencją mechanicznego ruchu osklepka opisywanego przy wykorzystaniu mode-lu silnie tłumionego wahadła skrętnego. Zatem jakie-kolwiek wyznaczanie długiej stałej czasowej τ1 dla mo-delu wahadła skrętnego musi także uwzględniać możli-wy wpływ toru przetwarzania neuronowego. Zakłada-jąc, że przetwarzanie neuronowe nie bierze udziału w torze wzrokowo-przedsionkowym i oczopląs przedsion-kowy poprawnie odzwierciedla ruch osklepka, wówczas można przyjąć wartości τ1 zestawione w tabeli 3 jako poprawne.
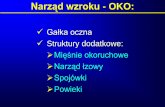
Właściwości dynamiczne modelu KPK, a zarazem funkcje sensoryczne tego receptora, można określić na podstawie wykresu charakterystyki Bodego (rys. 7) pasma przenoszenia modelu wahadła skrętnego (2). Do wykreślenia charakterystyk częstotliwościowych wyko-rzystano stałe czasowe z tabeli 3, wyznaczone przez twórców poszczególnych modeli KPK.

RAFAŁ LEWKOWICZ
97
Rys. 7. Charakterystyka częstotliwościowa wybranych modeli KPK
Większość ruchów głowy podczas normalnej ak-
tywności ciała jest w zakresie częstotliwości, w którym odpowiedź KPK ma stałe wzmocnienie amplitudy [71], co daje prawie stały stosunek pomiędzy wejściem i wyjściem, przy blisko zerowej zmianie fazy (rys. 7). W tym zakresie częstotliwości KPK funkcjonuje jako „ak-celerometr całkujący” lub przetwornik prędkości kąto-wej. Taką właściwość posiadają charakterystyki wykre-ślone na rys. 7, w których dla zakresu częstotliwości od 0,1 do 5 Hz występuje stałe wzmocnienie i blisko zero-we przesuniecie w fazie. Jedynie charakterystyka od-powiedzi modelu Steinhausena, i modelu van Egmonda i wsp. wykazuje niewielkie (około 30º) przesunięcie w fazie przy granicznych częstotliwościach 0,1 Hz i 5 Hz. Poniżej dolnego progu częstotliwości τ1
-1 odpowiedź modelu ulega zmniejszeniu pod wpływem sztywności osklepka, natomiast powyżej górnej częstotliwości τ2
-1 na zmniejszenie wzmocnienia odpowiedzi wpływa bez-władność endolimfy w smukłej części kanału [12].
Rozszerzając model KPK o zależności opisujące zjawiska fizjologicznych towarzyszące pobudzeniom tego receptora tj. neuronową adaptację (40) oraz człon doprowadzający (41), jego równanie (9) sprowadza się do postaci:
( )( ) ( ) ( ) 111
)(1s
21 +sτ
sτ
sτ+sτ+
sτ+K=
s
sQ
A
ALKPK
e
⋅
⋅⋅
⋅⋅⋅
⋅⋅⋅
α& (43)
W badaniach symulacyjnych z wykorzystaniem modelu (43), najczęściej przyjmowanymi wartościami parametrów są: stała czasowa adaptacji τA = 80 [38,39,72], stała członu doprowadzającego τL = 0,049 [39,51] oraz współczynnik KKPK = 3,44 ips/°/s2 [39,73]. Charakterystyki częstotliwościowe dla powyższych parametrów oraz stałych z tabeli 3, przyjmą postać przebiegów przedstawionych na rys. 8. Włączenie do modelu KPK tych dwóch komponentów (adaptacji oraz doprowadzającego) wpłynęło na zmianę charakte-rystyki odpowiedzi zarówno fazowej, jak i amplitudo-wej. Najmniejsze zniekształcenie odpowiedzi wykazuje model van Egmonda i wsp., który dla zakresu często-tliwości od 0,1 do 5 Hz posiada stałe wzmocnienie am-plitudy na poziomie -20 dB oraz w przybliżeniu stałe, około 10º przesunięcie w fazie. Przebieg amplitudy i fazy pozostałych modeli KPK ulegają wyraźnej zmianie już powyżej częstotliwości 1 Hz. Dla częstotliwości poniżej 0,01 Hz oraz z zakresu od 1 do 100 Hz przesu-niecie w fazie wzrasta do 90 stopni, w związku z czym receptor w tym przedziale częstotliwości funkcjonuje jako akcelerometr, a niżeli przetwornik prędkości ką-towej. Wynika z tego, że za wyjątkiem modelu van Egmonda i wsp., przy częstotliwościach z zakresu od 1 do 5 Hz odpowiedź modelu receptora (43), nie odzwier-ciedla oddziałującej na kanał prędkości kątowej.

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
98
Rys. 8. Charakterystyka częstotliwościowa wybranych modeli KPK i zjawisk fizjologicznych towarzyszących pobudzeniom
Wpływ neuronowej adaptacji i komponentu dopro-
wadzającego (opisane w podrozdziale 3.4.1) na poczucie ruchu obrotowego są wyraźnie widoczne (rys. 8). Ad-aptacja wpływa na odpowiedź przy niskich częstotliwo-ściach, poniżej 0,01 Hz, podczas gdy komponent do-prowadzający wpływa na odpowiedź układu przy czę-stotliwościach większych niż 10 Hz [12].
W przypadku modelu układu trzech KPK, ich stałe czasowe różnią się nieznacznie [74], zachowując jednak charakterystyczne pasmo przenoszenia dla częstotliwo-ści ruchów głowy podczas normalnej aktywności ciała. Niestety, w literaturze wyniki z badań doświadczalnych trzykanałowego modelu nie występują. Wyjątkiem są prace analityczne, np. Gastaldi i wsp. [75], w których podjęto próbę opracowania takiego modelu, jednakże bez eksperymentalnej walidacji jego poprawności.
Analogicznie do modelu KPK, właściwości dyna-miczne modelu narządu otolitowego można określić na podstawie wykresu charakterystyki Bodego (rys. 9). Dla modelu tego receptora (36), stosując poniższe pod-stawienie:
otooto
oto
eoto
ρ
ρ=K 211 ττ ⋅⋅
− (44)
oraz uwzględniając występowanie członu doprowadza-jącego (42), można otrzymać pełną postać transmitan-cji opisującej dynamikę narządu otolitowego [51]:
( )( ) ( ) ( )sτ+sτ+
sτ+K=
sGIF
sx
otooto
Lotooto
⋅⋅⋅
⋅⋅
21 11
1 (45)
Do wykreślenia charakterystyk częstotliwościowych (rys. 9) wykorzystano parametry modelu z tabeli 4, wyznaczone dla przyspieszeń oddziałujących w płasz-czyźnie poziomej (płaszczyźnie ułożenia łagiewki).
Nieopublikowane z badań Fernandeza i wsp. [49], Granta i wsp. [47,76], a także Ormsby’ego [41,72] war-tości parametrów τL oraz KOTO (tab. 4), zostały uzu-pełnione wartościami z innych badań. Przy wyborze tych wartości przyjęto kryterium podobieństwa warto-ści długiej stałej czasowej z stałą uzyskaną przez in-nych autorów [50,72,74].
Tab. 4. Stałe modelu narządu otolitowego (łagiewki)
Autor Stałe
Źródło τ1 oto τ2 oto τL oto KOTO
Young i Meiry
5,33 0,66 13,2 0,4 [51,72,74]
Fernandez i Goldberg
5 0,016 13,2* 0,4* [49]
Grant
i wsp. 0,5 0,002 1* 3,4* [47,51,76]
Reid i Nahon
5,33 0,66 13,2 0,4 [74]
Ormsby 7,5 0,51 10 0,4* [41,72]
Hosman 0,5 0,016 1 3,4 [50] * - wartość uzupełniona z badań innych autorów
Z badań Gastaldi i wsp. [75] wynika, że pomimo niepewności co do wartości parametrów fizjologicznych NP, wykreślane na ich podstawie odpowiedzi częstotli-wościowo-fazowe są zgodne z wynikami uzyskanymi z badań eksperymentalnych.

RAFAŁ LEWKOWICZ
99
Rys. 9. Charakterystyka częstotliwościowa wybranych modeli narządu otolitowego
Zgodnie z przedstawionymi na rys. 9 charaktery-
stykami częstotliwościowymi, z wyjątkiem odpowiedzi uzyskanej z modelu Younga i Meiry’ego oraz Fernan-deza i Goldberga, porównywane modele narządu otoli-towego od częstotliwości 0,001 Hz do 0,02 Hz nie wy-kazują znaczącego zniekształcenia odpowiedzi w fazie, potwierdzając działanie w tym zakresie jak akcelero-metr. Jest to zakres częstotliwości najczęściej napoty-kany w normalnych warunkach ruchu, w których ocze-kuje się takiej funkcji tego receptora [43]. Przy dużych częstotliwościach, powyżej 100 Hz faza odpowiedzi osiąga wartość -90°, wykazując funkcjonowanie recepto-ra jako przetwornika prędkości liniowej.
Z powodu istotnej trudności bezpośredniego pomia-
ru właściwości geometrycznych i fizjologicznych recep-torów NP, badania walidacyjne ich modeli przeprowa-dzano metodą pomiaru kontroli postawy [54], pomiaru oczopląsu [41] lub pomiaru sygnałów czuciowych [39,49]. Warto podkreślić, że większość badań walida-cyjnych modelu przeprowadzano dla osób o różnym poziomie wrażliwości na pobudzenie (stopniu habitu-acji) oraz osobniczo zmiennej, nie podlegającej weryfi-kacji restytucji NP. Jedynie w nielicznych przypadkach badania przeprowadzano przy pochyleniu głowy do przodu o kąt 30°, wymuszając ułożenie kanału boczne-go NP w płaszczyźnie maksymalnego pobudzenia bodźcem kinetycznym. W związku z takimi ogranicze-niami, wykazanie skuteczności i przydatności poszcze-gólnych modeli receptorów na podstawie ich oceny porównawczej może być obarczone błędami metody ich walidacji.
Ocenę jakościową odpowiedzi modeli KPK (tab. 3, rys. 8), można również przeprowadzić drogą symulacji numerycznych. Wynik przeprowadzonych obliczeń przedstawiono na rys. 10. Do obliczeń zastosowano prędkości kątowe oddziałujące na głowę człowieka pod-czas 20-sekundowej próby na fotelu obrotowym (6 peł-nych cykli rotacji), przy maksymalnej prędkości kąto-wej 60 °/s (0,17 Hz) i maksymalnym przyspieszeniu kątowym 17 °/s2. W czasie testu badany zajmował pozycję siedzącą z głową podpartą o zagłówek odchylo-ny od pionu ku przodowi o kąt 30°. Badanie wykony-wano przy zamkniętych oczach. Z badań uzyskano wy-niki w postaci ruchów gałek ocznych (oczopląs) oraz prędkość kątową fotela obrotowego względem osi pio-nowej (rys. 10 – wykres linia ciągła). Stosując algorytm [77] do analizy charakterystyk oczopląsu, w trybie post-hoc wykonano rekonstrukcję prędkości kątowej głowy, którą na rys. 10 oznaczono linią kropkowaną (podpis „rekonstrukcja”).
Zarejestrowany w czasie testu kinetycznego oczo-pląs podczasoobrotowy jest obiektywnym objawem zaburzeń KPK, a wyznaczona na jego podstawie pręd-kość kątowa „rekonstrukcja” (rys. 10) jest rzeczywistą odpowiedzią tego receptora. W celu poprawy czytelno-ści przebiegów graficznych na rys. 10. uzyskane z sy-mulacji numerycznej wartości odpowiedzi modelu KPK zwiększono stokrotnie. Ocena jakościowa tych odpo-wiedzi wskazuje, że model KPK dla danych (tab. 3) uzyskanych z badań van Egmonda i wsp. [15] z naj-większym przybliżeniem odzwierciedla charakterystykę odpowiedzi tego receptora (rys. 10 – wykres „rekon-strukcja”).

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
100
Rys. 10. Wynik symulacji numerycznych odpowiedzi modelu KPK
Do podobnych wniosków doprowadziła analiza po-
równawcza właściwości dynamicznych modeli KPK (rys. 8), przeprowadzona na podstawie charakterystyki odpowiedzi częstotliwościowej. Dla przedstawionych wyników symulacji (rys. 10), przy maksymalnej często-tliwości 0,17 Hz obrotu fotela, opóźnienie fazowe od-powiedzi modelu względem odtworzonej z oczopląsu prędkości kątowej („rekonstrukcja”) jest w przybliżeniu zerowe. Opóźnienie w fazie zwiększa jednak swoją war-tość wraz ze spadkiem prędkości kątowej fotela, czego potwierdzeniem jest przebieg odpowiedzi modelu przedstawiony na charakterystyce częstotliwościowej (rys. 8).
5. PODSUMOWANIE Przeprowadzona na podstawie charakterystyki czę-
stotliwościowej analiza porównawcza właściwości dy-namicznych modeli receptorów NP wykazała, że model KPK (43) z największym przybliżeniem odzwierciedla charakterystykę odpowiedzi tego receptora dla danych uzyskanych z badań van Egmonda i wsp. [15]. W przy-padku modelu narządu otolitowego (45) najlepszą przydatność do symulacji zjawisk fizjologicznych wywo-łanych przyspieszeniem liniowym, uzyskano dla para-metrów z badań Hosmana [50]. Nie oznacza to jednak, że parametry modelu uzyskane przez innych badaczy nie mogą znaleźć zastosowania w badaniach symulacyj-nych. Przykładem mogą być badania numeryczne ła-godnych, położeniowych zawrotów głowy [1,2,35,69], dla których większą przydatność mają modele KPK
Steera, van Buskirka, Omana i wsp., do budowy któ-rych zastosowano prawa dynamiki płynu.
Zgodnie z uwagą Rabbitta i wsp. [51], dla zachowa-nia stabilności obliczeń numerycznych całkowanie rów-nań różniczkowych modelu receptora powinno odbywać się z krokiem przynajmniej dziesięciokrotnie mniej-szym, aniżeli najmniejsza stała czasowa modelu.
Cytowane w tym artykule liczne badania nad opra-cowaniem pełnego i dokładnego modelu receptorów NP nie zawsze były łączone z eksperymentalną walidacją jego poprawności. Zbieranie danych eksperymentalnych jest zatem nadal kwestią otwartą w badaniach symula-cyjnych modeli receptorów NP.
Dla modelu (43) dynamiki układu trzech KPK do badań symulacyjnych można przyjąć wartości parame-trów zestawionych w tabeli 5.
Tab. 5. Parametry modelu układu trzech KPK
Parametr
Wartość dla obrotu względem osi Źródło
Ox Oy Oz
τ1 6,1 5,3 10,2 [15,42,72] τ2 0,1 0,1 0,1
τA 80 80 80
τL 0,049 0,049 0,049 [39]
THKPK [º/s] 3,0 3,6 2,6 [72]
W przypadku modelu dynamiki narządów otolito-
wych (łagiewki i woreczka) stosuje się jednakowe trzy modele (45), po jednym dla każdej z osi układu współ-rzędnego z nimi związanego. W tabeli 6 zamieszczono pełen zestaw parametrów modelu narządu otolitowego,

RAFAŁ LEWKOWICZ
101
możliwy do wykorzystania w badaniach symulacyjnych tego receptora.
Tab. 6. Parametry modelu narządu otolitowego (łagiewki i woreczka)
Parametr
Wartość dla przyspieszenia względem osi Źródło
Ox Oy Oz
τ1 oto 0,5 0,5 0,5
[50] τ2 oto 0,016 0,016 0,016
τL oto 1 1 1
KOTO 3,4 3,4 3,4
THOTO [m/s2] 0,17 0,17 0,28 [72]
Opisane modele receptorów NP dostarczają jedynie
informacji o reakcji tego narządu na bodźce w postaci przyspieszenia kątowego i liniowego, podczas gdy ludz-ka percepcja położenia i ruchu jest procesem bardzie złożonym, realizowanym na poziomie OUN. Pomimo
tego wskazane w podsumowaniu modele, również w formie komponentu bardziej złożonych modeli, np. odruchu przedsionkowo-ocznego, bądź orientacji prze-strzennej, mogą znaleźć zastosowanie w badaniach możliwości wystąpienia u człowieka w ruchu lądowym, powietrznym i morskim zaburzeń percepcji postaw i ruchu, powodujących zaburzenia równowagi oraz cho-robę lokomocyjną. Wskazane modele mogą również stanowić przydatne narzędzie w pracach naukowo-badawczych nad udoskonaleniem istniejących i nowo-opracowywanych symulatorów wyposażonych w plat-formy ruchu. Ponadto istnieje możliwość zastosowania modelu w innych dziedzinach, na przykład w diagno-styce medycznej w zakresie symulacji dysfunkcji NP [1,35], ocenie patologii układu równowagi człowieka oraz w rehabilitacji przy opracowywaniu protez tego narządu.
Literatura
1. Rajguru S.M, Rabbitt R.D.: Afferent responses during experimentally induced semicircular canalithiasis. „J Neurophysiol” 2007, Vol. 97, No. 3, p. 2355–2363.
2. Obrist D., Hegemann S., Kronenberg D., Hauselmann O., Rosgen T.: In vitro model of a semicircular canal: Design and validation of the model and its use for the study of canalithiasis. „J Biomech”. 2010, Vol. 43, No. 6, p. 1208–1214.
3. Anatomia ucha wewnętrznego człowieka. http:\\www.silentium.com.plindex.phpartykul=8. Dostęp: marzec 2016.
4. Silverthorn D. U.: Human physiology: an integrated approach. 5th ed. Pearson 2007. ISBN 13:9780321559395. 5. Curthoys I.S., Markham C.H, Curthoys E.J.: Semicircular duct and ampulla dimensions in cat, guinea pig
and man. „J Morphol”. 1977, Vol. 151, No. 1, p. 17–34. 6. Curthoys I.S., Oman C.M.: Dimensions of the horizontal semicircular duct, ampulla and utricle in the human.
„Acta Otolaryngol”. 1987, Vol. 103, No. 5, p. 254–261. 7. Bradshaw A.P., Curthoys I.S., Todd M.J., Magnussen J.S., Taubman D.S., Aw S.T, et al.: A mathematical
model of human semicircular canal geometry: a new basis for interpreting vestibular physiology. „JARO - J Assoc Res Otolaryngol”. 2010, Vol. 11, No. 2, p. 145–159.
8. Gualtierotti T.: The vestibular system: function and morphology. Mila, Włochy: Springer-Verlag; 1981. ISBN 9781461259046.. 552 p.
9. Della Santina C.C., Potyagaylo V., Migliaccio A.A., Minor L.B., Carey J.P.: Orientation of human semicircular canals measured by three-dimensional multiplanar CT reconstruction. „J Assoc Res Otolaryngol”. 2005, Vol. 6, No. 3, p. 191–206.
10. Kowalczuk K.: Wartość diagnostyczna parametrów fizjologicznych podczas wywoływanej dezorientacji przestrzennej. Warszawa: Wojskowy Instytut Medycyny Lotniczej, 2003.
11. Stanfield C.L: Principles of human physiology. 4th.ed. Pearson 2010. ISBN 9780321652874.. 12. Rabbitt R.D., Damiano E.R., Grant J.W.: Biomechanics of the semicircular canals and otolith organs. In:
The Vestibbular System. Springer Handbook of Auditory Research 2004, p. 153–201. ISBN 9780387215679 13. Van Buskirk W.C., Watts R.G., Liu Y.K.: Fluid mechanics of the semicircural canals. „J Fluid Mech”. 1976,
Vol. 78, No. 1, p. 87–98. 14. Steinhausen W.: Ueber die Beobachtung der Cupula in den Bogengangsampullen des Labyrinths des lebenden
Hechts. „Pflugers Arch Gesamte Physiol Menschen Tiere”. 1933, Vol. 232, p. 500–512. 15. Van Egmond A.A.J., Groen J.J., Jongkees L.B.W.: The mechanics of the semicircular canal. „J Physiol”.
1949, Vol. 110, No. 1-2, p. 1–17. 16. Groen J.J., Lowenstein O., Vendrik A.J.H: The mechanical analysis of the responses from the end-organs

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
102
of the horizontal semicircular canal in the isolated elasmobranch labyrinth. „J Physiol”. 1952, Vol. 117, No. 3, p. 329–346.
17. Steer R.W.: The ifluence of angular and linear acceleration and thermal stimulation on the human semicircular canals. Massachusetts Institute of Technology 1967.
18. Oman C.M., Marcus E.N., Curthoys I.S.: The influence of semicircular canal morphology on endolymph flow dynamics: an anatomically descriptive mathematical model. „Acta Otolaryngol” 1987, Vol. 103, No. 1-2, p. 1–13.
19. Rabbitt R.D., Damiano E.R.: A hydroelastic model of macromechanics in the endolymphatic vestibular canal. „J Fluid Mech”. 1992, Vol. 238, No. 1, p. 337–369.
20. Damiano E.R., Rabbitt R.D.: A singular perturbation model of fluid-dynamics in the vestibular semicircular canal and apulla. „J Fluid Mech”. 1996, Vol. 307, p. 333–372.
21. Rabbitt R.D.: Directional coding of three-dimensional movements by the vestibular semicircular canals. „Biol Cybern” 1999, Vol. 80, No. 6, p.417–431.
22. Mingyu X.U., Wenchang T: Problem of the fluid dynamics in semicicrular canals. „Sci China”. 2000, Vol. 43, No. 5, p. 517–526.
23. Muller M., Verhagen J.H.G.: A new quantitative model of total endolymph flow in the system of semicircular ducts. „J Theor Biol”. 1988, Vol. 134, No. 4, p. 473–501.
24. Muller M., Verhagen J.H.G.: Optimisation of the mechanical performance of a two-duct semicircular duct system. Part 3: The positioning of the ducts in the head. „J Theor Biol”. 2002, Vol. 216, No. 4, p. 443–459.
25. Muller M., Verhagen J.H.G.: Optimization of the mechanical performance of a two-duct semicircular duct system. Part 2: Excitation of endolymph movements. „J Theor Biol”. 2002, Vol. 216, No. 4, p. 425–442.
26. Muller M., Verhagen J.H.G.: Optimization of the mechanical performance of a two-duct semicircular duct system Part 1: Dynamics and duct dimensions. „J Theor Biol”. 2002, Vol. 216, p. 409–424.
27. Ifediba M.A., Rajguru S.M., Hullar T.E., Rabbitt R.D.: The role of 3-canals biomechanics in angular motion transduction by the human vestibular labyrinth. „Ann Biomed Eng”. 2007, Vol. 35, No. 7, p. 1247–1263.
28. Obrist D.: Fluidmechanics of semicircular canals - revisited. „Zeitschrift fur Angew Math und Phys”. 2008, Vol. 59, No. 3, p. 475–97.
29. Grossman G.E., Leigh R.J., Abel L.A., Lanska D.J, Thurston S.E.: Frequency and velocity of rotational head perturbations during locomotion. „Exp Brain Res”. 1988, Vol. ;70, No. 3, p. 470–476.
30. Mayne R.: A systems concept of the vestibular organs. „Vestib Syst Part 2 Psychophys Appl Asp Gen Interpret”. 1974, Vol. 6, No. 2, p. 493–580.
31. Selva P.: Modélisation du système vestibulaire et modèles non-linéaires de perception de l’orientation spatiale. Université de Toulouse 2009.
32. Rabbitt R.D., Breneman K.D., King C., Yamauchi A.M., Boyle R.D, Highstein S.M.: Dynamic displacement of normal and detached semicircular canal cupula. „JARO - J Assoc Res Otolaryngol”. 2009, Vol. 10, p. 497–509.
33. Van Buskirk W.C.: The effect of the utricle on fluid flow in the semicircular canals. „Ann Biomed Eng”. 1977, Vol. 5, No. 1, p. 1–11.
34. Goldberg J.M., Fernandez C.: Physiology of peripheral neurons innervating semicircular canals of the squirrel monkey. III Variations among units in their discharge properties. „J Neurophysiol”. 1971, Vol. 34, p. 676–684.
35. Squires T.M., Weidman M.S., Hain T.C., Stone H.A.: A mathematical model for top-shelf vertigo: the role of sedimenting otoconia in BPPV. „J Biomech”. 2004, Vol. 37, p. 1137–1146.
36. Ghanem T.A, Rabbitt R.D., Tresco P.A.: Three-dimensional reconstruction of the membranous vestibular labyrinth in the toadfish, Opsanus tau. „Hear Res”. 1998, Vol. 124, No. 1-2, p. 27–43.
37. Mayne R.: The audiogyral illusion and the mechanism of spatial representation. „Bull Math Biophisics”. 1952, Vol. 14, p. 27–34.
38. Young L.R., Oman C. M.: Model for vestibular adaptation to horizontal rotation. „Aerosp Med”. 1969, Vol. 40, No. 10, p. 1076–1080.
39. Fernandez C., Goldberg J.M.: Physiology of peripheral neurons innervating semicircular canals of the squirrel monkey. II. Response to sinusoidal stimulation and dynamics of peripheral vestibular system. „J Neurophysiol”. 1971, Vol. 34, No. 4, p. 661–675.
40. Schmid R.M., Stefanelli M., Mira E.: Mathematical modelling: a contribution to clinical vestibular analysis. „Acta Otolaryngol”. 1971, Vol. 72, No. 4, p. 292–302.
41. Ormsby C.C.: Model of human dynamic orientation. Massachusetts Institute of Technology 1974. 42. Meiry J.L.: The vestibular system and human dynamic space orientation. Massachusetts Institute

RAFAŁ LEWKOWICZ
103
of Technology 1965. 43. Young L.R., Meiry J.L.: A revised dynamic otolith model. „Aviat Sp Environ Med”. 1968, Vol. 39, p. 606–608. 44. Zacharias G.L.: Motion sensation dependence on visual and vestibular cues. Massachusetts Institute
of Technology 1977. 45. Grant J.W., Best W.A.: Mechanics of the otolith organ-dynamic response. „Ann Biomed Eng”. 1986, Vol. 14,
No. 3, p. 241–256. 46. Grant J.W., Best W.A.: Otolith-organ mechanics: lumped parameter model and dynamic response. „Aviat Sp
Environ Med”. 1987, Vol. 58, No. 10, p. 970–976. 47. Grant J.W., Cotton J.R.: A model for otolith dynamic response with a viscoelastic gel layer. „J Vestib Res-
Equilib Orientat”. 1990, Vol.1, No. 2, p. 139–151. 48. De Vries H.: The mechanics of the labyrinth otoliths. „Acta Otolaryngol”. 1950, Vol. 38, No. 3, p. 262–273. 49. Fernandez C., Goldberg J.M.: Physiology of peripheral neurons innervating otolith organs of the squirrel
monkey. III. Response dynamics. " J Neurophysiol" 1976, Vol. 39, No. 5, p. 996-1008. 50. Hosman R.J.A.W.: Pilot’s perception and control of aircraft motions. Delft University of Technology 1996. 51. Telban R.J., Cardullo F.M.: Motion cueing algorithm development: human-centered linear and nonlinear
approaches. NASA TechReport CR-2005-213747. Binghamton, New York; 2005. 52. Bronzino J.D.: Biomedical engineering handbook. 3th ed. 2006. ISBN 9780849321214. 53. Newman M.C., Lawson B.D., Rupert A.H., Mcgrath B.J.: The role of perceptual modeling in the
understanding of spatial disorientation during flight and ground-based simulator training. In: AIAA Modeling and Simulation Technologies Conference. Minneapolis, MN; 2012. p. 1–14.
54. Nashner L.M.: Sensory feedback in human postural control. Massachusetts Institute of the Technology 1970. 55. Nashner L.M.: A model describing vestibular detection of body sway motion. „Acta Otolaryngol”. 1971, Vol.
72, No. 6, p. 429–436. 56. Benson A.J.: Interactions between semicircular canals and gravireceptors. „Recent Adv Aerosp Med”. 1970,
p. 249–261. 57. Bonnie R. S.: The GALE enycyclopedia of psychology. 2nd. ed. Gale Group; 2001. ISBN 0787647861. 58. Akbari B.: Linear self-motion thresholds on 6DOF platforms. 2014, p. 1–21. 59. Akbari B.: Investigations into self motion thresholds using a Stewart platform. Master of Applied Science
Thesis. McMaster University, Ontario, Canada, 2014. 60. Venkatesan R.H.: Multisensory models for human spatial orientation including threshold effects.
Massachusetts Institute of Technology 2010. 61. Gillingham K.K., Previc F.H.: Spatial orientation in flight. Report No. AL-TR-1993-0022. Brooks Air Force
Base, TX, 1993. 62. Gurovskiy N.N., Bryanov I.I., Yegorov A.D.: Changes in the vestibular function during space flight. „Acta
Astronaut”. 1975, Vol. 2, No. 2, p. 207–216. 63. Oman C.M.: Influence of adaptation on the human semicircular canals and the role of subjective angular
velocity cues in spatial orientation. Massachusetts Institute of Technology 1968. 64. Raphan T., Matsuo V., Cohen B.: Velocity storage in the vestibulo-ocular reflex arc (VOR). „Exp Brain Res”
1979, Vol. 35, No. 2, p. 229–248. 65. Robinson D.A.: Linear addition of optokinetic and vestibular signals in the vestibular nucleus. „Exp Brain
Res” 1977, Vol. 30, No. 2-3, p. 447–450. 66. Spenny C.H., Liebst B.S.: Assessment of motion devices used for spatial orientation research and training. In:
RTO HFM Symposium on “Spatial Disorientation in Military Vehicles: Causes, Consequences and Cures.” La Coruña, Spain: RTO-MP-086; 2002. p. 15–17.
67. Wang L.J., Sun H.Y, Pei J.C., Liu X.H., Tong B.L.: Effects of some physical training on vestibular function. „Space Med Med Eng (Beijing)” 2000, Vol.13, No. 6, p. 405–409.
68. Van Buskirk W.C.: Vestibular mechanics. In: Handbook of Bioengineering.. McGraw Hill; 1987. p. 31.1–31.17. 69. Obrist D.: Fluid mechanics of the inner ear. University Hospital Zurich and the Institute for Biomechanics
ETH Zurich 2011. 70. Hosman R.J.A.W., van Der Vaart J.C.: Vestibular models and thresholds of motion perception: results
of tests in a flight simulator. Report No. LR-265, Delft University of Technology 1978. 71. Young L.R.: Perception of the body in space: mechanisms. In: Handbook of Physiology, Sec 1: The nervous
system, v III: Sensory processes, pt 2. American Physiological Society; 1984. p. 1023-1066. 72. Zacharias G.L.: Motion cue models for pilot-vehicle analysis. Wright Patterson Air Base, Ohio, 1978. 73. Telban R.J., Wu W., Cardullo F.M., Houck J.A.: Motion cueing algorithm development: initial investigation

MODELE RECEPTORÓW NARZĄDU PRZEDSIONKOWEGO CZŁOWIEKA ORAZ ZJAWISK (…)
104
and redesign of the algorithms. NASA /CR- 2000-209863, 2000. 74. Reid L.D., Nahon M.A.: Flight simulation motion-base drive algorithimns: Part 1: Developing and Testing the
Equations. 1985. 75. Gastaldi L., Sorli S., Pastorelli M.: Vestibular apparatus: dynamic model of the semicircular canals. In:
"Modelling in Medecine and Biology" 2011, p. 223-234. . 76. Grant J.W., Huang C.C., Cotton J.R:: Theoretical mechanical frequency response of the otolithic organs.
„J Vestib Res”. 1994, Vol. 4, No. 2, p. 137–151. 77. Lessard S.C., Rodriguez-Gareia A.C., Wong W.C., Im J.J., Schmidt F.G.: Characterization of slow and fast
nystagmus. Vol. 1.The effects of brief mindfulness intervention on acute pain experience: an examination of individual difference. College Station, TX 1991.
Ten artykuł dostępny jest na licencji Creative Commons Uznanie autorstwa 3.0 Polska. Pewne prawa zastrzeżone na rzecz autorów. Treść licencji jest dostępna na stronie http://creativecommons.org/licenses/by/3.0/pl/