mechanika opracowanie 1.2
23
1. Określanie prędkości i przyspieszenia bryły w ruchu płaskim jeśli dane są prędkość i przyspieszenie punktu 0 oraz prędkość i przyspieszenie kątowe bryły 2. Równania ruchu bryły w ruchu postępowym
-
Upload
keri-sanchez -
Category
Documents
-
view
65 -
download
0
description
dsadsda
Transcript of mechanika opracowanie 1.2
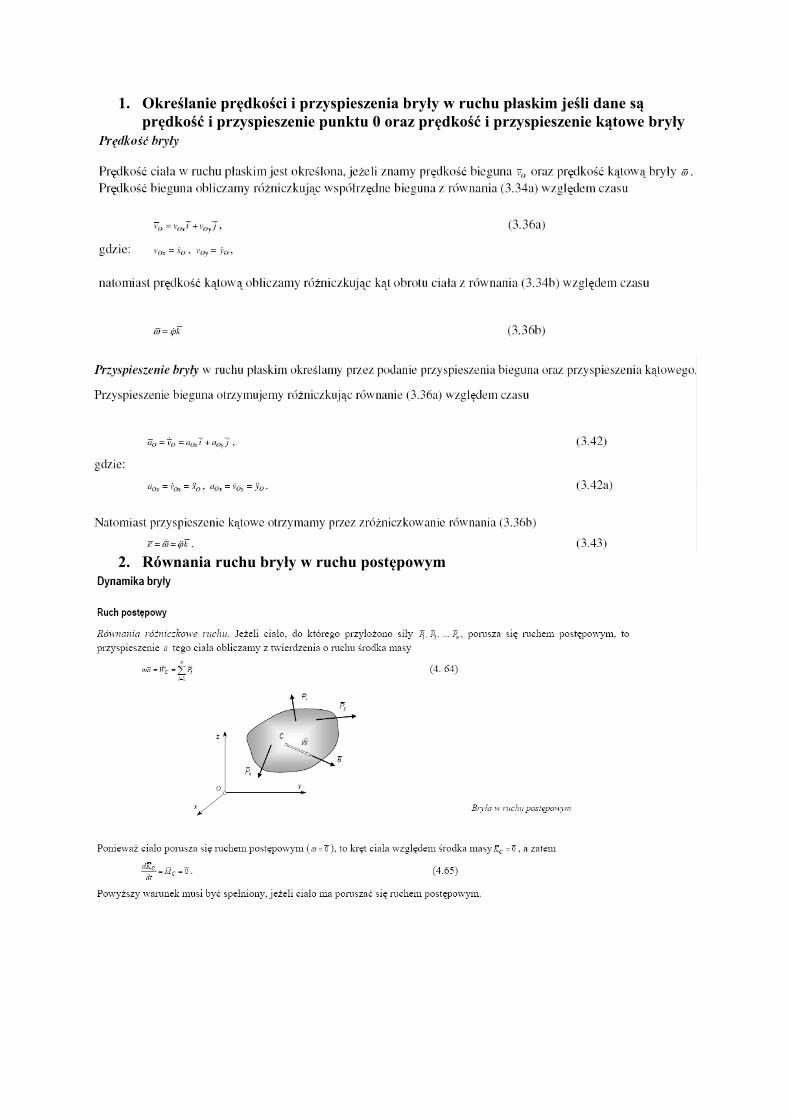
1. Określanie prędkości i przyspieszenia bryły w ruchu płaskim jeśli dane są prędkość i przyspieszenie punktu 0 oraz prędkość i przyspieszenie kątowe bryły
2. Równania ruchu bryły w ruchu postępowym
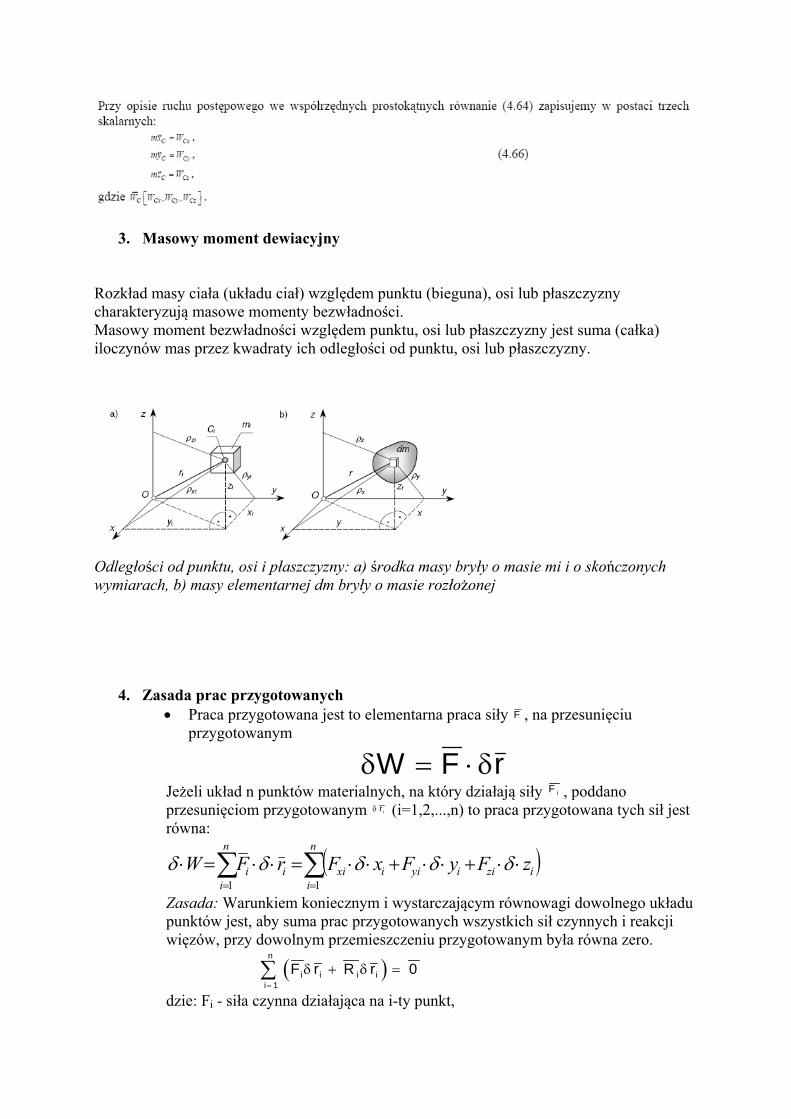
3. Masowy moment dewiacyjny
Rozkład masy ciała (układu ciał) względem punktu (bieguna), osi lub płaszczyzny charakteryzują masowe momenty bezwładności. Masowy moment bezwładności względem punktu, osi lub płaszczyzny jest suma (całka) iloczynów mas przez kwadraty ich odległości od punktu, osi lub płaszczyzny.
Odległości od punktu, osi i płaszczyzny: a) środka masy bryły o masie mi i o skończonych wymiarach, b) masy elementarnej dm bryły o masie rozłożonej
4. Zasada prac przygotowanych Praca przygotowana jest to elementarna praca siły F , na przesunięciu
przygotowanym
W F r Jeżeli układ n punktów materialnych, na który działają siły F i , poddano przesunięciom przygotowanym r i (i=1,2,...,n) to praca przygotowana tych sił jest równa:
n
iiziiyiixii
n
ii zFyFxFrFW
11
Zasada: Warunkiem koniecznym i wystarczającym równowagi dowolnego układu punktów jest, aby suma prac przygotowanych wszystkich sił czynnych i reakcji więzów, przy dowolnym przemieszczeniu przygotowanym była równa zero.
F r R ri i i i
i
n
1
0
dzie: Fi - siła czynna działająca na i-ty punkt,
Ri - reakcja więzów działających na i-ty punkt, ri - przesunięcie przygotowane i-tego punktu. Warunkiem koniecznym i wystarczającym równowagi dowolnego układu punktów o więzach idealnych jest, aby suma prac przygotowanych wszystkich sił czynnych działających na ten układ, przy dowolnym przemieszczeniu przygotowanym była równa zero.
F ri
i
n
i
1
0
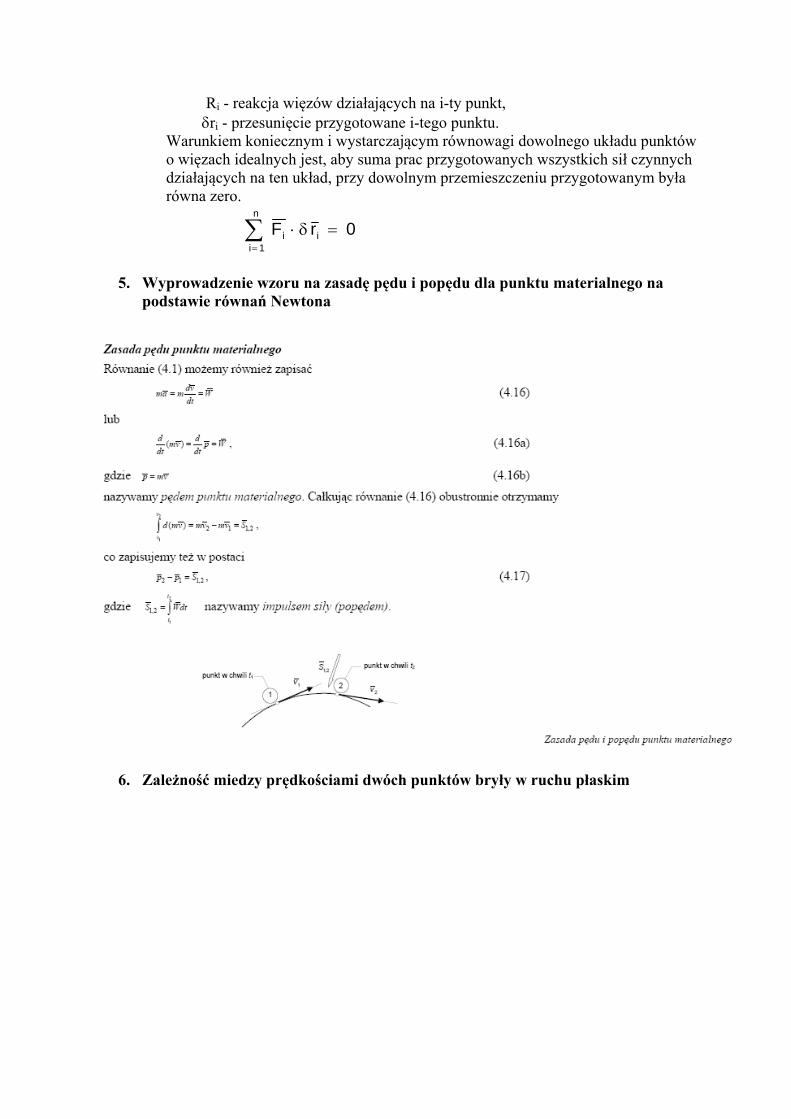
5. Wyprowadzenie wzoru na zasadę pędu i popędu dla punktu materialnego na
podstawie równań Newtona
6. Zależność miedzy prędkościami dwóch punktów bryły w ruchu płaskim
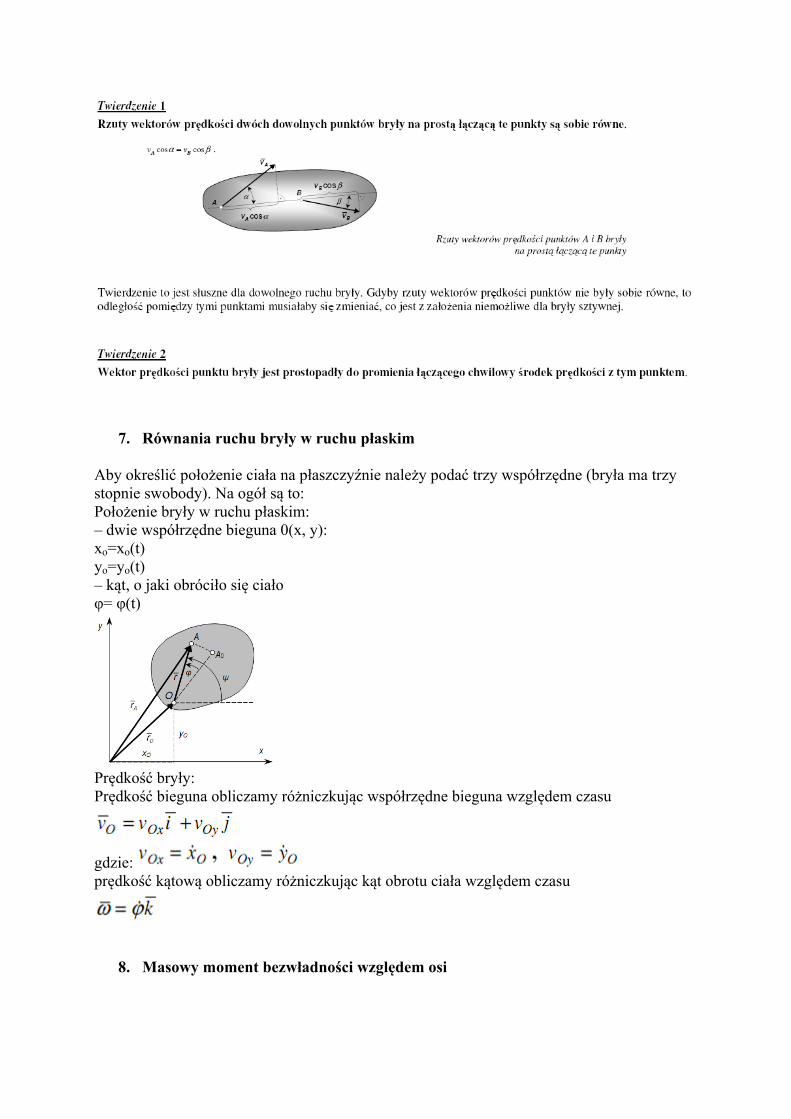
7. Równania ruchu bryły w ruchu płaskim Aby określić położenie ciała na płaszczyźnie należy podać trzy współrzędne (bryła ma trzy stopnie swobody). Na ogół są to: Położenie bryły w ruchu płaskim: – dwie współrzędne bieguna 0(x, y): xo=xo(t) yo=yo(t) – kąt, o jaki obróciło się ciało φ= φ(t)
Prędkość bryły: Prędkość bieguna obliczamy różniczkując współrzędne bieguna względem czasu
gdzie: prędkość kątową obliczamy różniczkując kąt obrotu ciała względem czasu
8. Masowy moment bezwładności względem osi

Masowy moment bezwładnosci wzgledem punktu, osi lub płaszczyzny jest suma (całka) iloczynów mas przez kwadraty ich odległosci od punktu, osi lub płaszczyzny.
9. Równania Lagrange’a II rodzaju
jjjjj
Fq
D
q
V
q
E
q
E
dt
d
gdzie: E – energia kinetyczna układu V – energia potencjalna układui mechanicznej)
Fj – niepotencjalna siła, działająca w kierunku j-tej współrzędnej uogólnionej
jq– j-ta współrzędna uogólniona
jq- j-ta prędkość uogólniona (zgodna z j-tą współrzędną uogólnioną)
s – liczba stopni swobody
10. Wyprowadź wzór na zasadę energii i pracy dla punktu materialnego na podstawie II zasady dynamiki Newtona
skąd lub Po scałkowaniu powyższego równania otrzymujemy
a ostatecznie
– energia kinetyczna punktu materialnego
– praca sił działających na punkt na drodze od s1 do s2
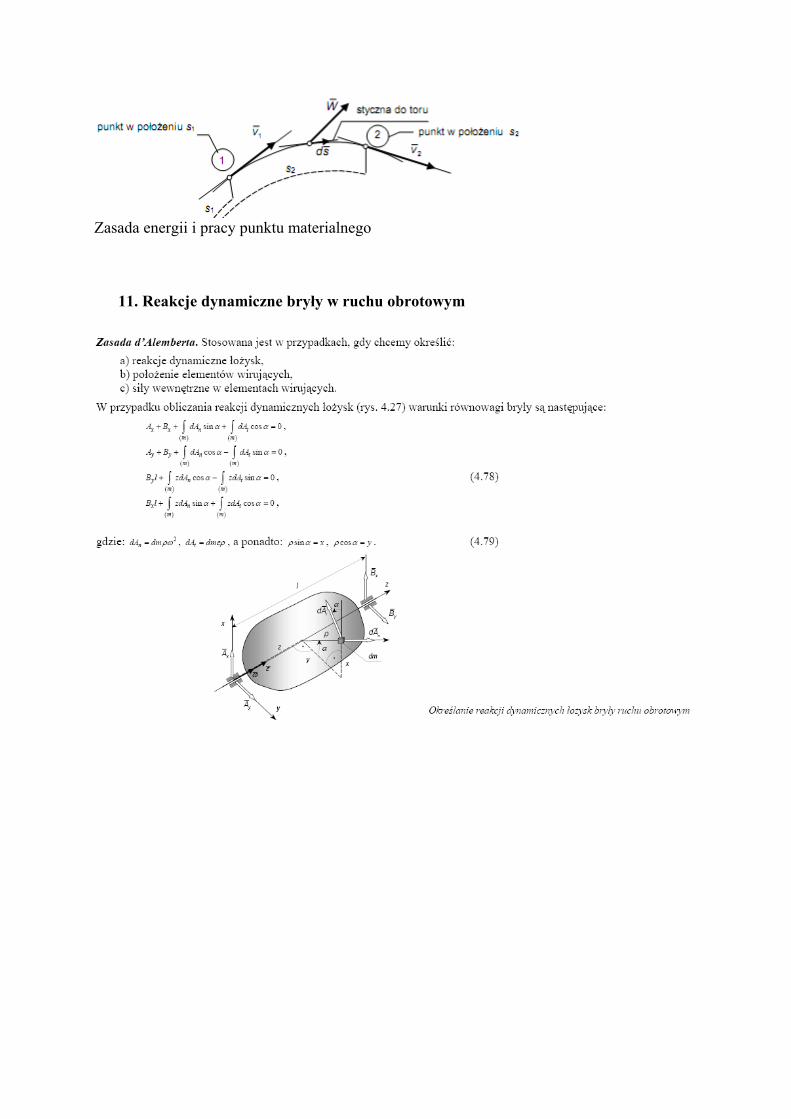
Zasada energii i pracy punktu materialnego
11. Reakcje dynamiczne bryły w ruchu obrotowym

12. Główne masowe momenty bezwładności

13. Współrzędne uogólnione i siły uogólnione Współrzędne uogólnione są to współrzędne niezależne od siebie, opisujące jednoznacznie położenie układu w przestrzeni. Siły uogólnione Qj(j=1,2,...s) są to wielkości spełniające równanie :
qj
1
s
ijQL
δL- praca przygotowana układu
δqj –przesunięcie przygotowane, zgodne z j-tą współrzędna uogólnioną Qj – j-ta siła uogólniona, zgodna z j-tą współrzedną uogólnioną S – liczba stopni swobody (liczba współrzędnych uogólnionych) Siłę uogólniona można wyznaczy z następującej zależności
)(1
n
i j
izi
j
iyi
j
ixi q
zF
q
yF
q
xFQj
Fxi,Fyi,Fzi- rzuty siły działającej na i-ty punkt xi,yi,zi- współrzędne prostokątne i-tego punktu qj- j-ta współrzędna uogólniona S – liczba stopni swobody
14. Prędkość punktu bryły w ruchu obrotowym ruch obrotowy- jest to taki ruch w którym istnieje taka prosta związana z bryłą której wszystkie punkty w dowolnej chwili czasu są nieruchome. Taką prostą nazywamy osią obrotu.
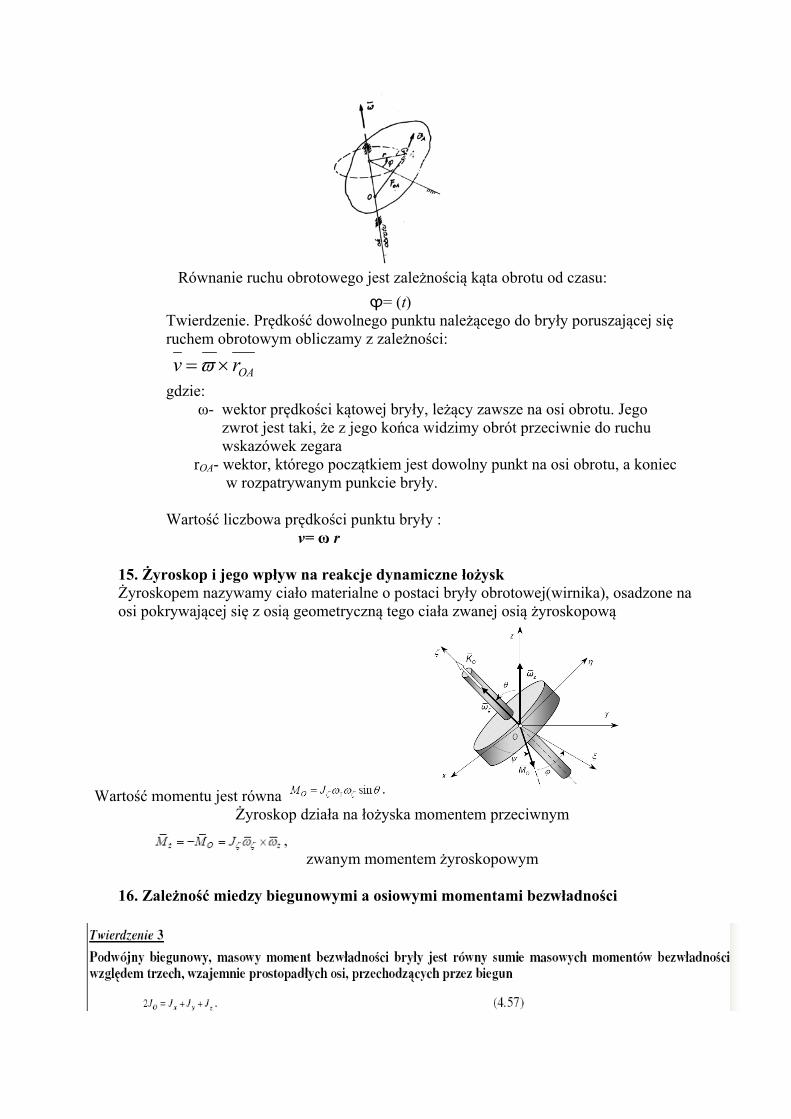
Równanie ruchu obrotowego jest zależnością kąta obrotu od czasu:
ϕ= (t) Twierdzenie. Prędkość dowolnego punktu należącego do bryły poruszającej się ruchem obrotowym obliczamy z zależności:
OArv
gdzie: ω- wektor prędkości kątowej bryły, leżący zawsze na osi obrotu. Jego zwrot jest taki, że z jego końca widzimy obrót przeciwnie do ruchu wskazówek zegara rOA- wektor, którego początkiem jest dowolny punkt na osi obrotu, a koniec w rozpatrywanym punkcie bryły. Wartość liczbowa prędkości punktu bryły : v= ω r
15. Żyroskop i jego wpływ na reakcje dynamiczne łożysk Żyroskopem nazywamy ciało materialne o postaci bryły obrotowej(wirnika), osadzone na osi pokrywającej się z osią geometryczną tego ciała zwanej osią żyroskopową
Wartość momentu jest równa Żyroskop działa na łożyska momentem przeciwnym
zwanym momentem żyroskopowym
16. Zależność miedzy biegunowymi a osiowymi momentami bezwładności

17. Definicja przesunięcia przygotowanego
Przesunięcie przygotowane r jest to pomyślane (wyobrażalne) przesunięcie punktu, o kierunku zgodnym z kierunkiem możliwej prędkości tego punktu.Przesunięcie przygotowane jest wektorem, który można przedstawić w następujący sposób:
r x i y j z k
gdzie: x, y, z - przyrosty elementarne współrzędnych x, y, z. Jeżeli f(x, y, z) = 0 przedstawia równanie powierzchni, na której znajduje się rozpatrywany punkt (równanie więzów), to dla przesunięcia przygotowanego zachodzi następujący związek:
f
xx
f
yy
f
zz 0
Przyrosty elementarne współrzędnych prostokątnych dowolnego i-tego punktu są równe
j
s
i j
ii q
q
xx
1
j
s
i j
ii q
q
yy
1
j
s
i j
ii q
q
zz
1
lub wektorowo:
j
s
i j
ii q
q
rr
1
gdzie: s- liczba stopni swobody.
18. Kret bryły w ruchu płaskim
Przesunięcie przygotowane r jest to pomyślane (wyobrażalne) przesunięcie punktu, o kierunku zgodnym z kierunkiem możliwej prędkości tego punktu.Przesunięcie przygotowane jest wektorem, który można przedstawić w następujący sposób:
r x i y j z k
gdzie: x, y, z - przyrosty elementarne współrzędnych x, y, z. Jeżeli f(x, y, z) = 0 przedstawia równanie powierzchni, na której znajduje się rozpatrywany punkt (równanie więzów), to dla przesunięcia przygotowanego zachodzi następujący związek:
f
xx
f
yy
f
zz 0
Przyrosty elementarne współrzędnych prostokątnych dowolnego i-tego punktu są równe
j
s
i j
ii q
q
xx
1
j
s
i j
ii q
q
yy
1
j
s
i j
ii q
q
zz
1
lub wektorowo:
j
s
i j
ii q
q
rr
1
gdzie: s- liczba stopni swobody.
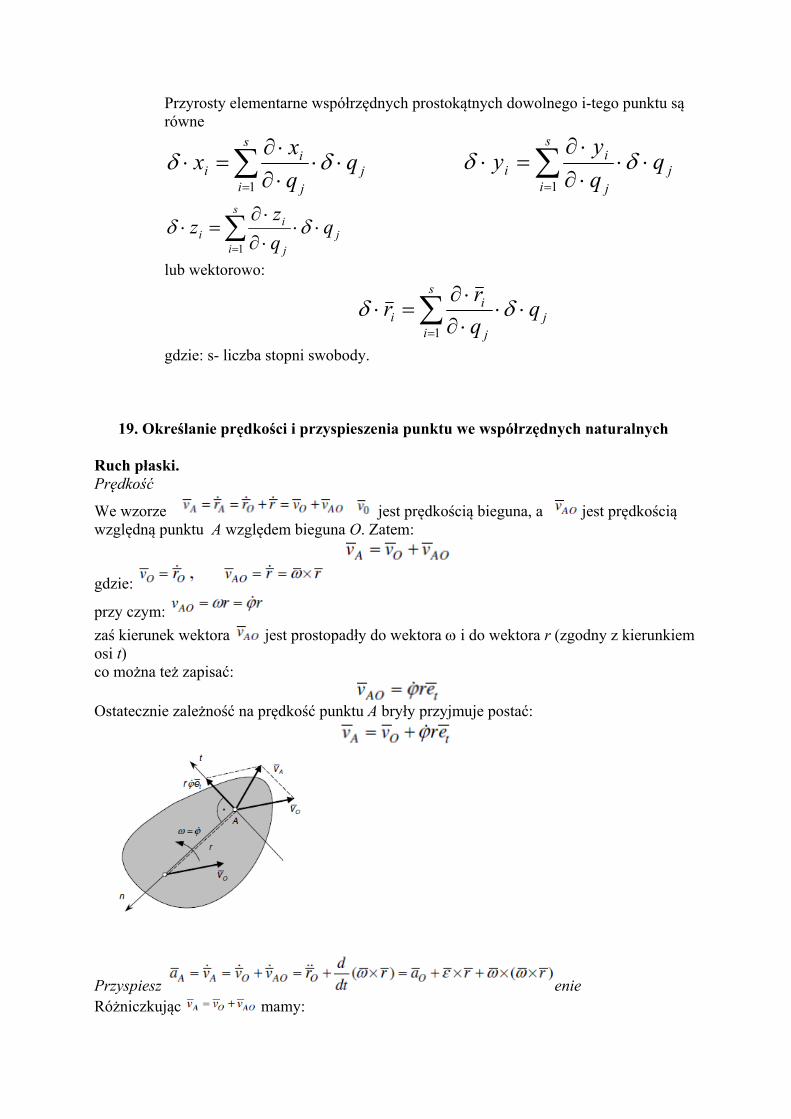
19. Określanie prędkości i przyspieszenia punktu we współrzędnych naturalnych Ruch płaski. Prędkość
We wzorze jest prędkością bieguna, a jest prędkością względną punktu A względem bieguna O. Zatem:
gdzie:
przy czym:
zaś kierunek wektora jest prostopadły do wektora i do wektora r (zgodny z kierunkiem osi t) co można też zapisać:
Ostatecznie zależność na prędkość punktu A bryły przyjmuje postać:
Przyspiesz enie Różniczkując mamy:
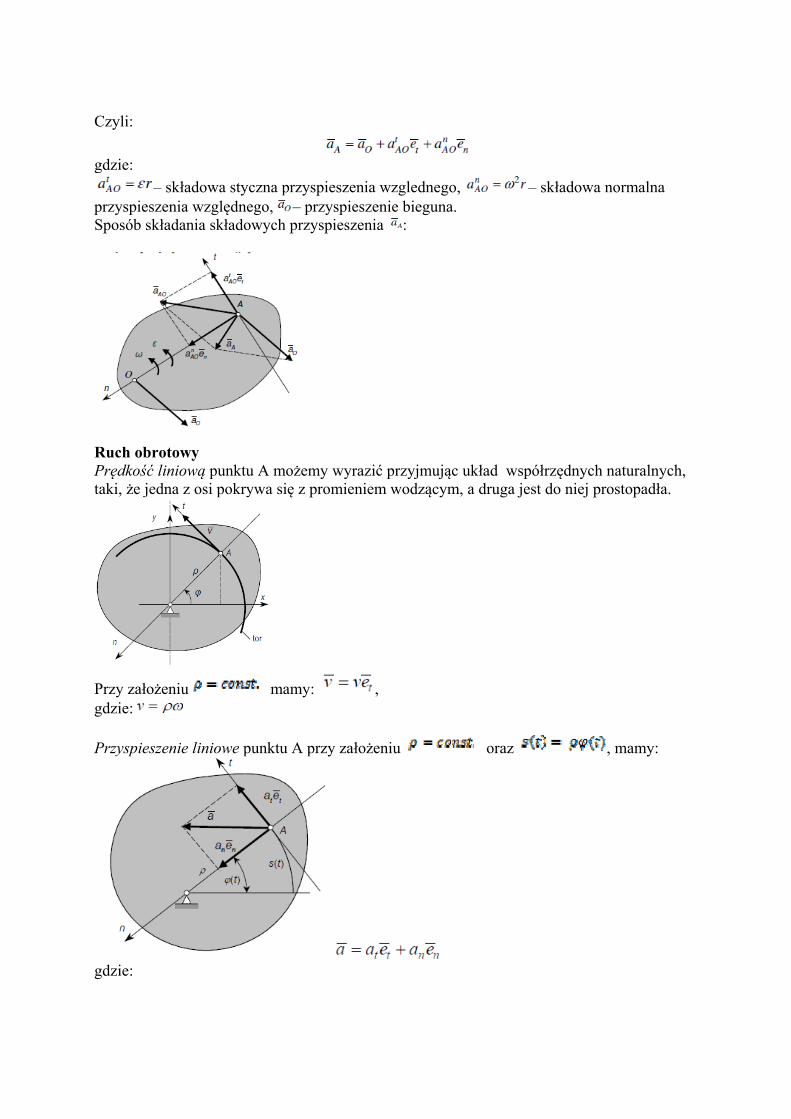
Czyli:
gdzie:
– składowa styczna przyspieszenia wzglednego, – składowa normalna przyspieszenia względnego, – przyspieszenie bieguna. Sposób składania składowych przyspieszenia :
Ruch obrotowy Prędkość liniową punktu A możemy wyrazić przyjmując układ współrzędnych naturalnych, taki, że jedna z osi pokrywa się z promieniem wodzącym, a druga jest do niej prostopadła.
Przy założeniu mamy: , gdzie: Przyspieszenie liniowe punktu A przy założeniu oraz , mamy:
gdzie:
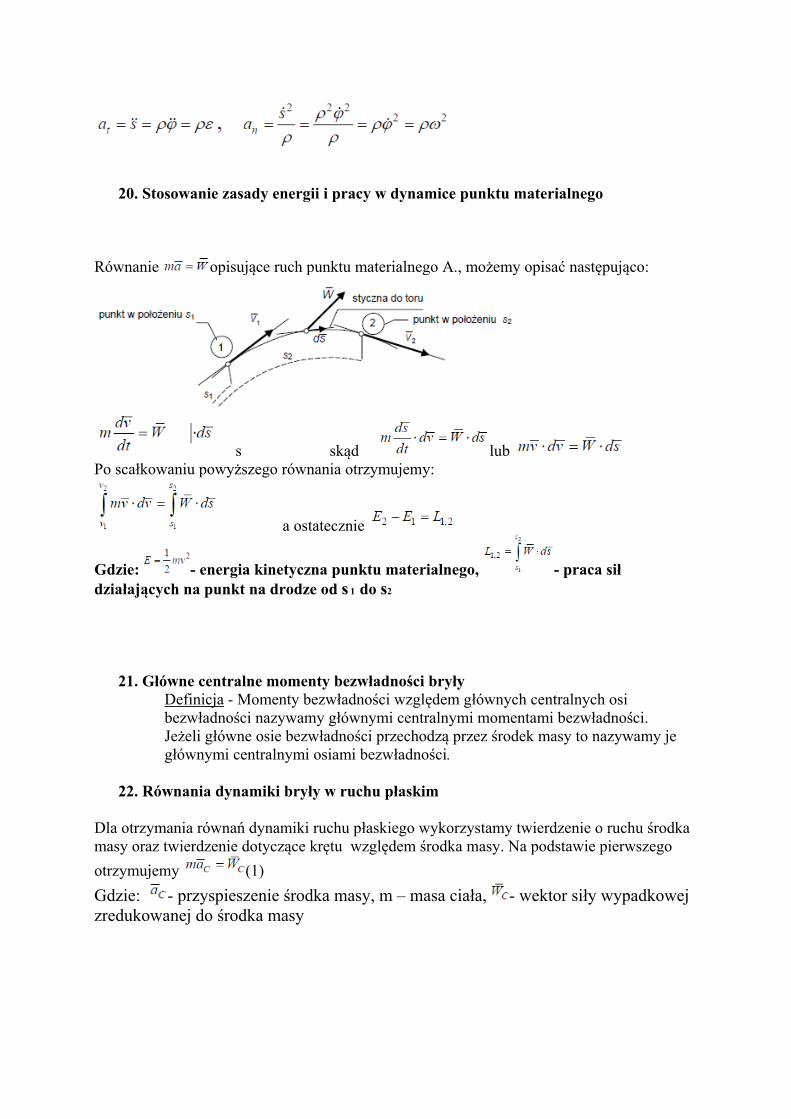
20. Stosowanie zasady energii i pracy w dynamice punktu materialnego Równanie opisujące ruch punktu materialnego A., możemy opisać następująco:
s skąd lub Po scałkowaniu powyższego równania otrzymujemy:
a ostatecznie
Gdzie: - energia kinetyczna punktu materialnego, - praca sił działających na punkt na drodze od s 1 do s2
21. Główne centralne momenty bezwładności bryły Definicja - Momenty bezwładności względem głównych centralnych osi bezwładności nazywamy głównymi centralnymi momentami bezwładności. Jeżeli główne osie bezwładności przechodzą przez środek masy to nazywamy je głównymi centralnymi osiami bezwładności.
22. Równania dynamiki bryły w ruchu płaskim Dla otrzymania równań dynamiki ruchu płaskiego wykorzystamy twierdzenie o ruchu środka masy oraz twierdzenie dotyczące krętu względem środka masy. Na podstawie pierwszego
otrzymujemy (1)
Gdzie: - przyspieszenie środka masy, m – masa ciała, - wektor siły wypadkowej zredukowanej do środka masy
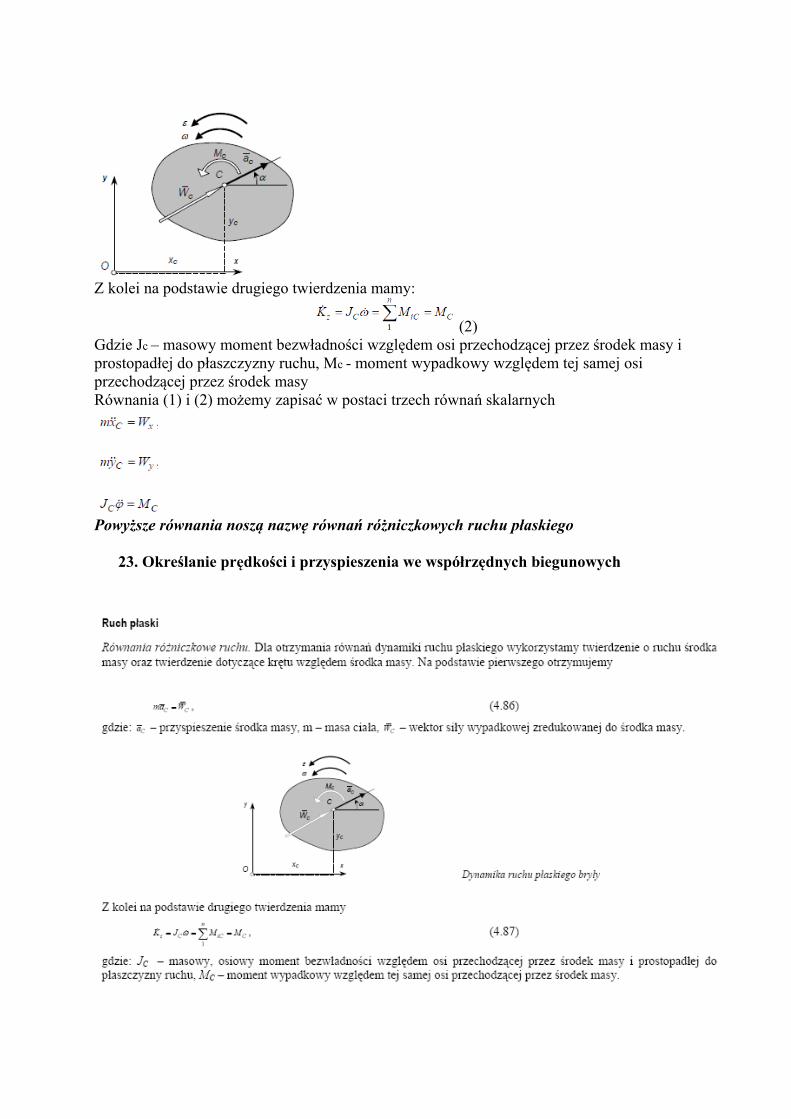
Z kolei na podstawie drugiego twierdzenia mamy:
(2) Gdzie Jc – masowy moment bezwładności względem osi przechodzącej przez środek masy i prostopadłej do płaszczyzny ruchu, Mc - moment wypadkowy względem tej samej osi przechodzącej przez środek masy Równania (1) i (2) możemy zapisać w postaci trzech równań skalarnych
Powyższe równania noszą nazwę równań różniczkowych ruchu płaskiego
23. Określanie prędkości i przyspieszenia we współrzędnych biegunowych

24. Stosowanie zasady pędu i popędu punktu materialnego (sama zasada bez stosowania przyp. chmiel)!!!
Dla punktu materialnego: Przyrost pędu punktu materialnego jest równy sumie popędów sił działających na ten punkt
01 pp
t
dttF0
)(
lub
t
dttFVmVm0
01 )(
F –siła t- czas
Gdy F=const w czasie t=t1-t0 tFpp 01
25. Obliczanie prędkości punktu bryły w ruchu płaskim
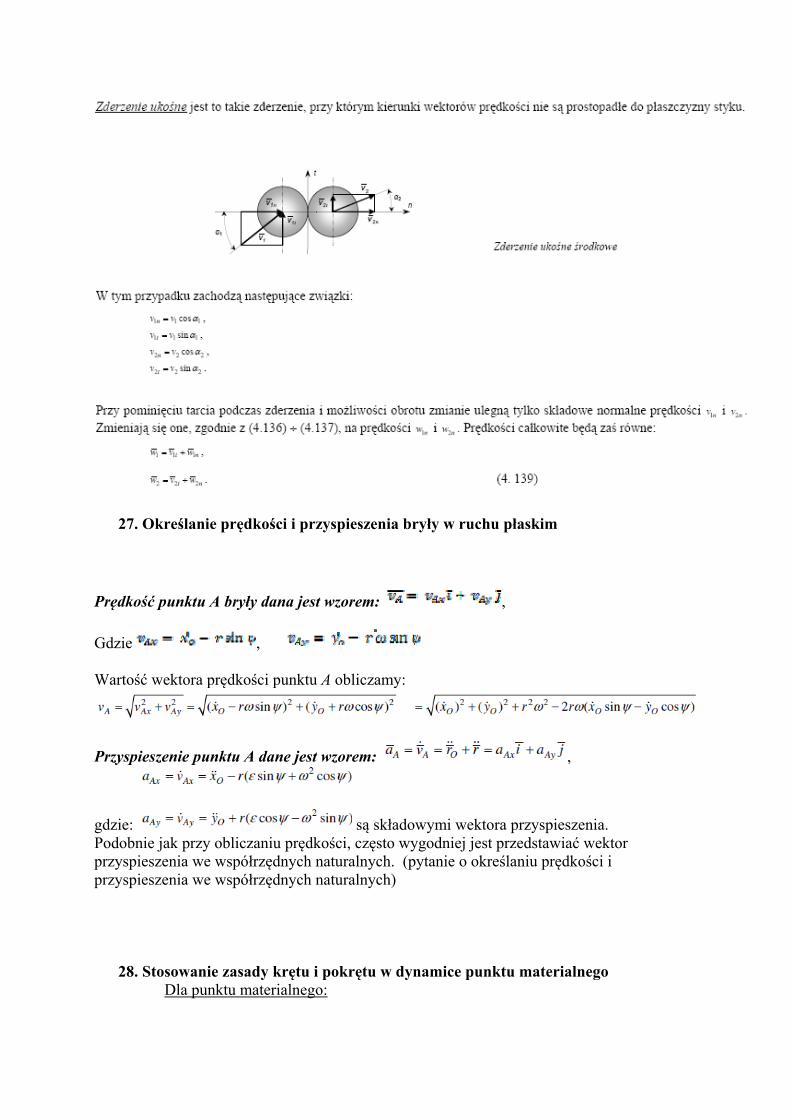
26. Zderzenia centralne środkowe

27. Określanie prędkości i przyspieszenia bryły w ruchu płaskim
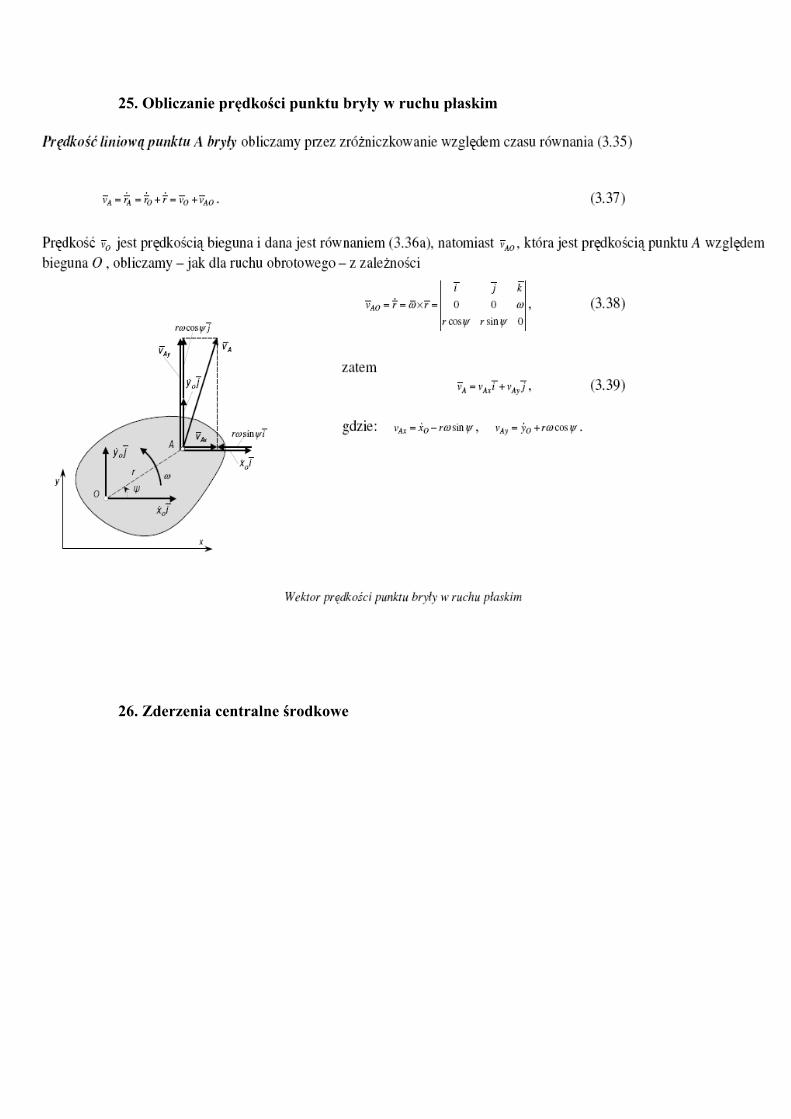
Prędkość punktu A bryły dana jest wzorem: ,
Gdzie , Wartość wektora prędkości punktu A obliczamy:
Przyspieszenie punktu A dane jest wzorem: ,
gdzie: są składowymi wektora przyspieszenia. Podobnie jak przy obliczaniu prędkości, często wygodniej jest przedstawiać wektor przyspieszenia we współrzędnych naturalnych. (pytanie o określaniu prędkości i przyspieszenia we współrzędnych naturalnych)
28. Stosowanie zasady krętu i pokrętu w dynamice punktu materialnego Dla punktu materialnego:
Przyrost krętu punktu materialnego względem punktu 0 jest równy pokrętowi sił działających na ten punkt względem punktu
001 zLL lub
dtMmvrvmrt
0
001
29. Twierdzenie Stainera Masowe momenty bezwładności i masowe momenty dewiacyjne względem
układów osi x,y,z przesuniętych równolegle względem osi xc,yc,zc przechodzących przez środek masy są odpowiednio równe:
Ix y = Ix c y c+maz2 Ix = Ix c+ mbx
2 Iy z = Iy c z c+max
2 Iy = Iy c+ mby2
Iz x = Iz c x c+may2 I z = Iz c+ mbz
2 Dx = Dx c+ mayaz Dy = Dy c+ mazax
Dz = Dz c+ maxay
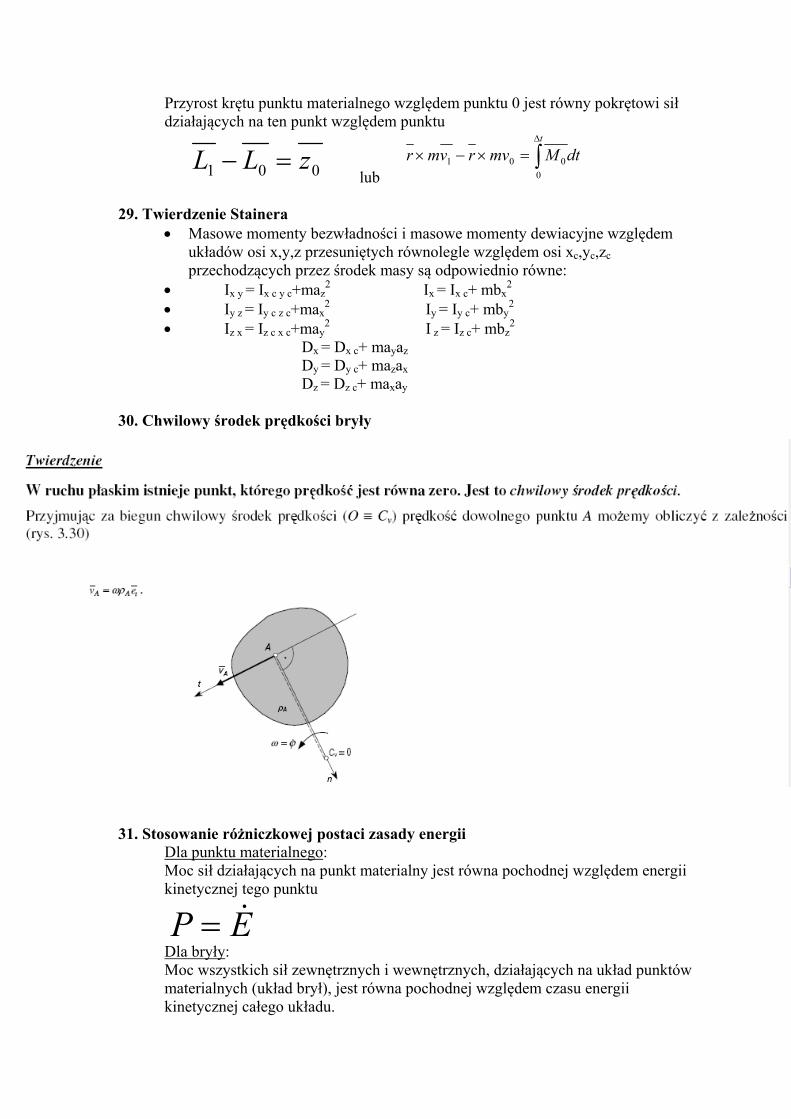
30. Chwilowy środek prędkości bryły
31. Stosowanie różniczkowej postaci zasady energii Dla punktu materialnego: Moc sił działających na punkt materialny jest równa pochodnej względem energii kinetycznej tego punktu
EP Dla bryły: Moc wszystkich sił zewnętrznych i wewnętrznych, działających na układ punktów materialnych (układ brył), jest równa pochodnej względem czasu energii kinetycznej całego układu.
EPP gdzie: P- moc wszystkich sił zewnętrznych, działających na rozpatrywanym układzie P’- moc wszystkich sił wewnętrznych, działających na rozpatrywanym układzie
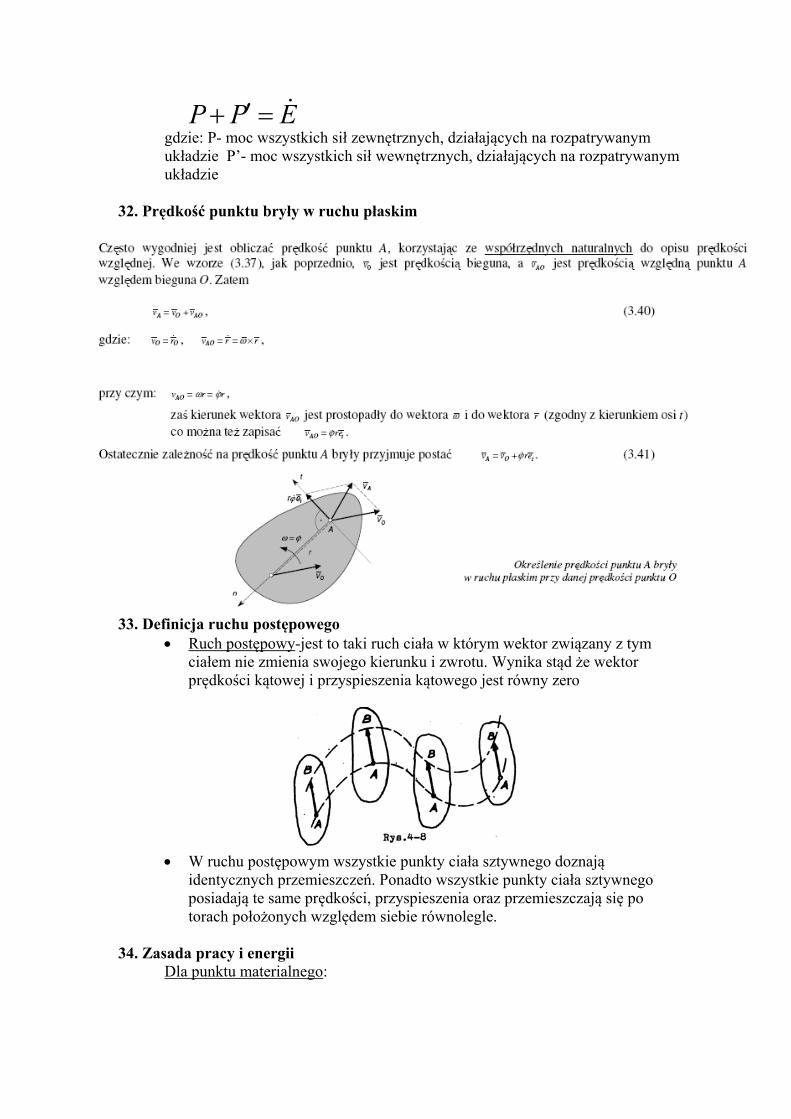
32. Prędkość punktu bryły w ruchu płaskim
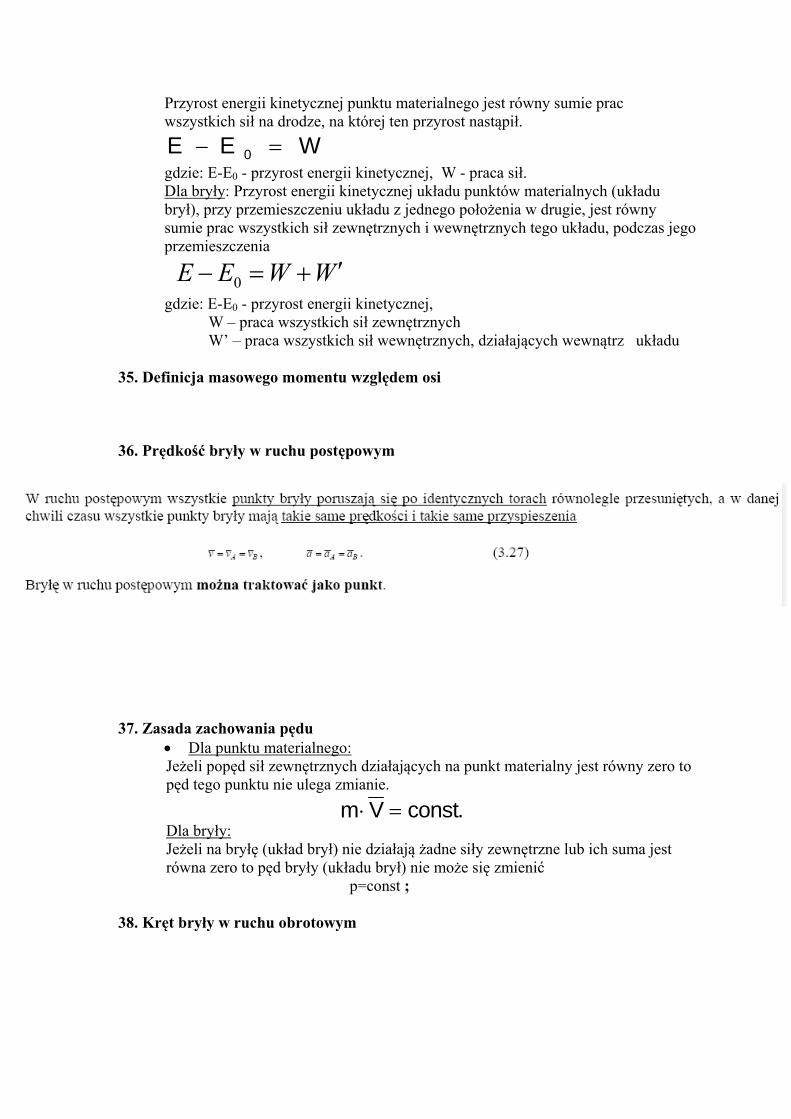
33. Definicja ruchu postępowego
Ruch postępowy-jest to taki ruch ciała w którym wektor związany z tym ciałem nie zmienia swojego kierunku i zwrotu. Wynika stąd że wektor prędkości kątowej i przyspieszenia kątowego jest równy zero
W ruchu postępowym wszystkie punkty ciała sztywnego doznają
identycznych przemieszczeń. Ponadto wszystkie punkty ciała sztywnego posiadają te same prędkości, przyspieszenia oraz przemieszczają się po torach położonych względem siebie równolegle.
34. Zasada pracy i energii
Dla punktu materialnego:
Przyrost energii kinetycznej punktu materialnego jest równy sumie prac wszystkich sił na drodze, na której ten przyrost nastąpił.
E E W 0 gdzie: E-E0 - przyrost energii kinetycznej, W - praca sił. Dla bryły: Przyrost energii kinetycznej układu punktów materialnych (układu brył), przy przemieszczeniu układu z jednego położenia w drugie, jest równy sumie prac wszystkich sił zewnętrznych i wewnętrznych tego układu, podczas jego przemieszczenia
WWEE 0
gdzie: E-E0 - przyrost energii kinetycznej, W – praca wszystkich sił zewnętrznych W’ – praca wszystkich sił wewnętrznych, działających wewnątrz układu
35. Definicja masowego momentu względem osi
36. Prędkość bryły w ruchu postępowym
37. Zasada zachowania pędu Dla punktu materialnego: Jeżeli popęd sił zewnętrznych działających na punkt materialny jest równy zero to pęd tego punktu nie ulega zmianie.
m V const . Dla bryły: Jeżeli na bryłę (układ brył) nie działają żadne siły zewnętrzne lub ich suma jest równa zero to pęd bryły (układu brył) nie może się zmienić p=const ;
38. Kręt bryły w ruchu obrotowym
39. Zależności miedzy masowymi momentami względem osi X Y Z i płaszczyzn X-Y;
Y-Z; Z-X
40. Zasada zachowania krętu Dla punktu materialnego: Jeżeli pokręt sił zewnętrznych działających na punkt materialny jest równy zero, to kręt tego punktu nie ulega zmianie
constvmr Dla bryły: Jeżeli moment sił zewnętrznych działających na bryłę (układ brył) względem punktu 0 jest równy zero, to kręt tej bryły (układu brył) względem punktu 0 nie może się zmienić.
L const .
41. Jak obliczamy główne momenty bezwładności Jeżeli znamy momenty bezwładności Jx, Jy, Jz i momenty dewiacyjne Dx, Dy,
Dz bryły, względem dowolnego układu prostokątnego x, y, z to główne momenty bezwładności tej bryły są równe wartościom własnym macierzy bezwładności.
JJ D D
D J D
D D J
x z y
z y x
y x z
a cosinusy kierunkowe głównych osi bezwładności są wektorami własnymi tej macierzy unormowanymi w ten sposób, że suma kwadratów ich składowych jest równa jedności.
42. Własności głównych osi bezwładności Twierdzenie Dla dowolnej bryły można znaleźć takie trzy osie wzajemnie prostopadłe, że momenty dewiacyjne względem tego układu są równe zero. Jeżeli główne osie bezwładności bryły przechodzą przez środek masy to nazywamy je głównymi centralnymi osiami bezwładności.
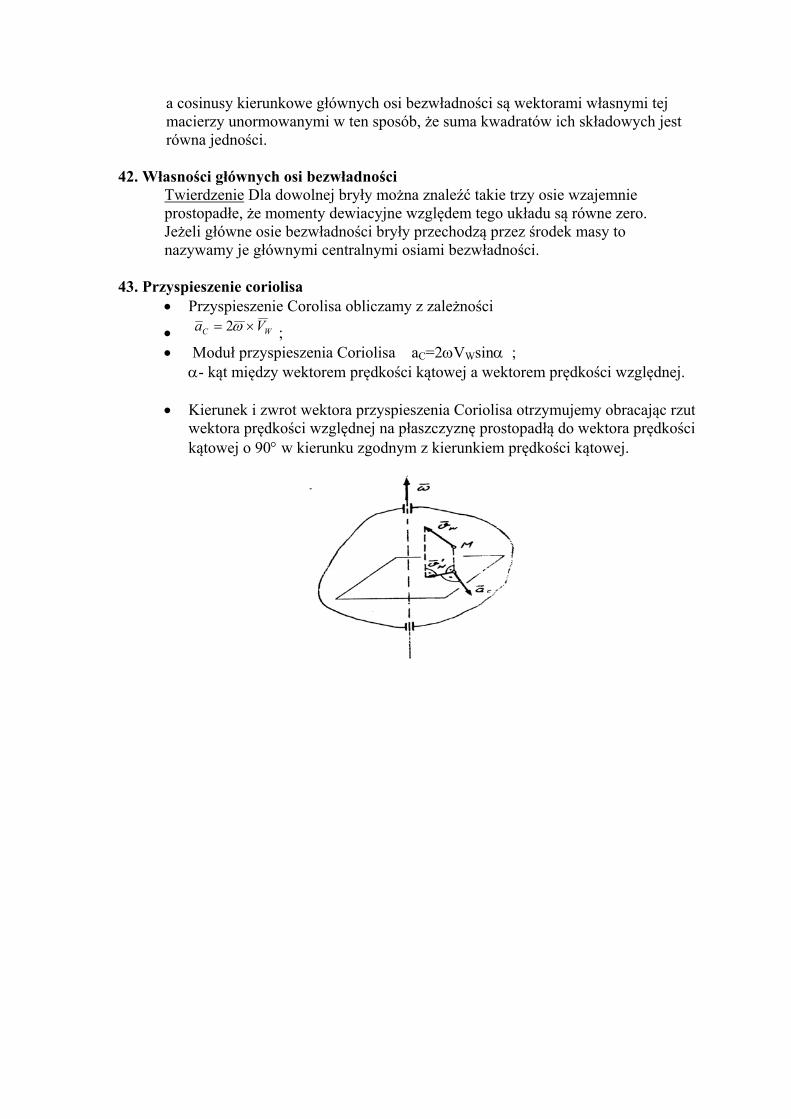
43. Przyspieszenie coriolisa Przyspieszenie Corolisa obliczamy z zależności
WC Va 2 ; Moduł przyspieszenia Coriolisa aC=2VWsin ;
- kąt między wektorem prędkości kątowej a wektorem prędkości względnej. Kierunek i zwrot wektora przyspieszenia Coriolisa otrzymujemy obracając rzut
wektora prędkości względnej na płaszczyznę prostopadłą do wektora prędkości kątowej o 90 w kierunku zgodnym z kierunkiem prędkości kątowej.