Materiały e-learning
14
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: ZAKŁAD KOMUNIKACYJNYCH TECHNOLOGII MORSKICH Materiały e-learning ELEKTROTECHNIKA I ELEKTRONIKA Materiały dla studentów studiów niestacjonarnych http://www.zktm.am.szczecin.pl/index.php/laboratoria Opracował: dr inż. Marcin Mąka, dr inż. Piotr Majzner Zatwierdził: dr inż. Piotr Majzner Obowiązuje od: 24. IX 2012
Transcript of Materiały e-learning

AKADEMIA MORSKA W SZCZECINIE
JEDNOSTKA ORGANIZACYJNA:
ZAKŁAD KOMUNIKACYJNYCH TECHNOLOGII MORSKICH
Materiały e-learning
ELEKTROTECHNIKA I ELEKTRONIKA
Materiały dla studentów studiów niestacjonarnych
http://www.zktm.am.szczecin.pl/index.php/laboratoria
Opracował: dr inż. Marcin Mąka, dr inż. Piotr Majzner
Zatwierdził: dr inż. Piotr Majzner
Obowiązuje od: 24. IX 2012

1. Pojęcie sygnałów elektrycznych
Sygnałem elektrycznym nazywamy przebieg czasowy napięcia lub natężenia prądu elektrycznego
wykorzystany do przekazania informacji, np. dźwięku, obrazu, danych, bodźców sterujących itp.
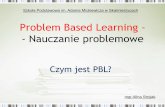
W podstawowej klasyfikacji rozróżnia się sygnały analogowe (ciągłe) i cyfrowe (dyskretne) (rys. 1.1.).
Rys. 1.1. Przykład sygnału ciągłego i dyskretnego
Sygnały analogowe mogą przyjmować nieskończenie wiele wartości dowolnie mało różniących
się od siebie, innymi słowy, zbiór wartości sygnału analogowego jest nieprzeliczalny. Sygnały cyfrowe
przyjmują tylko skończoną liczbę wartości, a więc ich wartości należą do zbioru przeliczalnego.
Sygnały analogowe mogą się zmieniać w dowolnej chwili, natomiast sygnały cyfrowe tylko w
pewnych punktach czasowych. Szczególnymi rodzajami tych sygnałów są sygnały harmoniczne
(analogowe) nazywane ogólnie sygnałami sinusoidalnymi oraz sygnały dwuwartościowe (cyfrowe)
nazywane w skrócie sygnałami binarnymi.
Ważne znaczenie w technice mają również sygnały nazywane ogólnie impulsowymi. Sygnałem
impulsowym jest sygnał o dużej amplitudzie trwający bardzo krótko. W praktyce określenie impuls
odnosi się najczęściej do przebiegów, których czas trwania jest znacznie krótszy niż okres powtarzania
(rys. 1.2).
Rys. 1.2. Przykłady sygnałów impulsowych

Impulsy mogą być dodatnie lub ujemne, pojedyncze lub grupowe, powtarzane okresowo lub
nieokresowe itd. Wiele wspólnych cech z sygnałami impulsowymi mają sygnały okresowe prostokątne
(rys.1.3) i piłokształtne (rys.1.4).
Rys. 1.3. Przykłady sygnałów prostokątnych Rys. 1.4. Przykłady sygnałów piłokształtnych
1.5.2. Parametry stosowane w opisie sygnałów elektrycznych
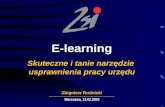
Na rysunku 1.5. przedstawiono przebieg sinusoidalny natężenia prądu elektrycznego. Wartość
chwilową tego sygnału (prądu sinusoidalnego) i(t) określa następująca zależność:
i(t) = Im sin( t +)
w której:
- Im – wartość maksymalna (amplituda) prądu;
- – faza początkowa prądu w chwili t = 0;
- t + – faza prądu w chwili t;
- = 2 – pulsacja (częstotliwość kątowa);
- = 1/T – częstotliwość, będąca odwrotnością okresu T.
W czasie jednego okresu T faza prądu zmienia się o 2, tzn. = 2.
Rys. 1.5. Interpretacja graficzna parametrów sygnału sinusoidalnego
Wartość skuteczną (effective) sygnału okresowego (prądu) o okresie T wyraża zależność:
f(t
) t
f(t
) t
t
f(t
)
t
f(t
)

dttiT
I
T
ef 0
2 )(1
Odpowiada ona wartości prądu stałego, który przepływając przez rezystor o stałej (niezmiennej)
wartości rezystancji, spowoduje wydzielenie w nim takiej samej ilości energii (w postaci ciepła), co
prąd sinusoidalny płynący w tym samym czasie. W przypadku prądu sinusoidalnego wartość
skuteczna natężenia prądu jest równa jego amplitudzie podzielonej przez 2 , czyli
Ief = Im/ 2 0,707 Im
Wartość średnią (average) sygnału okresowego (prądu) o okresie T wyraża zależność:
Iav = T
dttiT
0
)(1
Odpowiada ona wartości prądu stałego, który płynąc przez dany przekrój poprzeczny
przewodnika przeniósłby w tym samym czasie taki sam ładunek, jak prąd zmienny. Ponieważ w
przypadku prądu sinusoidalnego wartość średnia za cały okres, czyli tzw. wartość całookresowa, jest
równa zeru, dlatego zwykle w celu określenia wartości średniej prądu sinusoidalnego przyjmuje się
czas równy połowie okresu T/2, wówczas
Iav = 2/
0
)(2
T
dttiT
=
2Im 0,637 Im
Iloraz wartości skutecznej i średniej (prądu) określa tzw. współczynnik kształtu krzywej k = Ief /Iav,
który dla przebiegów sinusoidalnych jest równy k = /2 2 1,11.
Sygnał binarny (rys. 1.6.a) charakteryzuje się tym, że przyjmuje tylko dwie różne wartości
oznaczane zwykle symbolami L, H (Low – niski, High – wysoki) lub 0,1. Cyfry 0, 1 nazywa się
bitami (Binary digit). Wartości napięć i prądów odpowiadające tym dwu wartościom dwójkowym (0,
1) nie muszą być ustalane z bezwzględną dokładnością. Wystarczy, że zawierają się w pewnych dość
szerokich przedziałach poziomów L, H, rozdzielonych przedziałem wartości wzbronionych (rys.
1.6.b).
Rys. 1.6. Interpretacja graficzna parametrów sygnału binarnego
Sygnał binarny przedstawiony w funkcji czasu ma postać ciągu impulsów (zerojedynkowych).
Reprezentuje on określoną informację wyrażoną w odpowiednim kodzie, np. dwójkowym naturalnym,
dwójkowodziesiętnym (BCD) itp. Uporządkowany zbiór kolejno po sobie następujących bitów
stanowi słowo kodowe. Charakterystyczną cechą każdego kodu jest długość słowa kodowego,
wyrażająca się liczbą występujących w nim bitów. Do określania długości słowa jest stosowana
jednostka zwana bajtem (byte), składająca się z umownej liczby bitów; zazwyczaj 1 bajt odpowiada 8
bitom. W zależności od tego, czy poszczególne bity słowa kodowego są przekazywane kolejno
(szeregowo), czy jednocześnie (równolegle), rozróżnia się sygnały binarne szeregowe i równoległe.

Podstawowymi parametrami sygnału impulsowego są wartość maksymalna (amplituda) Am oraz
czasy narastania tr, opadania tf, trwania t1, odstępu t2, a także okres powtarzania T = t1 + t2. Interpretację graficzną tych parametrów podano na rysunku 1.7. Iloraz Czasu trwania (szerokości
impulsu) t1 i okresu powtarzania T określa tzw. współczynnik wypełnienia impulsu (tj. kw = t1/T).
Rys. 1.7. Interpretacja graficzna parametrów sygnału impulsowego
W elektronice często pojawia się określenie składowej stałej sygnału i składowej zmiennej
sygnału. W wielu przypadkach trudno mówić o napięciu stałym, jeżeli napięci to waha się w pewnych
nieznacznych przedziałach w stosunku do całego napięcia. Składową stałą przebiegu elektrycznego
(napięcia elektrycznego, prądu elektrycznego) nazywamy wartość średnią tego przebiegu (rys 1.8).
Składową zmienną przebiegu nazywamy różnicę pomiędzy przebiegiem a jego składową stałą
(rys 1.9). Inaczej mówiąc składową stałą jest ten fragment przebiegu który się nie zmienia, a składową
zmienną tylko ta jego część która się zmienia.
Rys. 1.8 Ilustracja przebiegu ze składowa stałą i zmienną Rys. 1.9 Przebieg tylko ze składową zmienną
Sygnały elektryczne, w zależności od tego jaką cechę sygnału chcemy uwypuklić, mogą być
prezentowane w różny sposób. Na rysunkach 1.2, 1.3, 1.4 sygnały były przedstawiane w sposób
przebiegu. Jest to najbardziej naturalna prezentacja sygnałów, w takiej postaci oglądamy je np. na
oscyloskopie. Przy tym systemie prezentacji na osi rzędnych odkładane są chwilowe wartości prądu
lub napięcia wyrażone w amperach lub woltach (albo w jednostkach pochodnych mA, mV i tp.), a na
osi odciętych czas wyrażany w sekundach lub jednostkach pochodnych.
W sytuacji gdy zależy nam szczególnie na pokazaniu zależności fazowych między sygnałami
elektrycznymi, bardziej przydatna okazuje się prezentacja wektorowa sygnałów. W tym systemie
prezentacji długości wektorów przedstawiają w przyjętej skali wartości napięć lub prądów, a kąty
między nimi zależności fazowe między poszczególnymi napięciami a prądami. Weźmy dla przykładu
prosty obwód elektryczny składający się z rezystancji R i pojemności C zasilany napięciem
sinusoidalnie zmiennym U o częstotliwości f przedstawiony na rys. 1.10.
Uav
U
t
U
t

Rys. 1.10 Napięcia w układzie RC.
Oczywiście, zarówno prąd płynący w obwodzie jak i napięcie zasilające oraz spadki napięć na
rezystancji i pojemności można by było przedstawić w postaci graficznej jako cztery poprzesuwane
względem siebie sinusoidy, jednak rysunek ten byłby mało czytelny. Zdecydowanie bardziej
przydatną będzie tu prezentacja wektorowa prądów i napięć (rys. 6.5.7).
Rys. 1.11. Wykres wskazowy do układ z rys. 1.10
Jeszcze inną metodą prezentacji sygnałów jest przedstawianie ich w postaci widma
częstotliwości. Rozważmy w tym celu prosty sygnał sinusoidalny przedstawiony graficznie na rys.
1.12.
Rys. 1.12
Sygnał ten możemy zapisać analitycznie w postaci:
gdzie:
– U0 – amplituda sygnału
– – pulsacja
I R C
U
UR UC
U UC I
UX
Rys. 5.7
U
t
T
tUu o sin
Tf
22

W celu przedstawienia tego sygnału w postaci widmowej na osi wyskalowanej w jednostkach
częstotliwości rysujemy prążek o wysokości równej, w przyjętej skali, amplitudzie sygnału. Położenie
prążka na osi określa jego częstotliwość (rys. 1.13).
Rys. 1.13 Widmo sygnały sinusoidalnegpo.
Należy zwrócić uwagę, że rysunki 1.12 i 1.13 przedstawiają ten sam sygnał, różnią się jedynie
sposobem jego prezentacji.
Prezentacji widmowej szczególnie często używa się dla sygnałów złożonych pojawiających się w
zagadnieniach związanych z łącznością radiową. W tym miejscu rozpatrzmy pojęcie sygnału
złożonego. Wspomniany wyżej sygnał sinusoidalny zwany również harmonicznym określa się w
elektronice mianem sygnału prostego. Każdy inny sygnał, o dowolnym kształcie, jest sygnałem
złożonym składającym się ze skończonej lub nieskończonej sumy sygnałów prostych (sinusoidalnych)
o różnych częstotliwościach. Sumę tą przedstawioną na osi częstotliwości w postaci układu prążków
nazywamy widmem częstotliwości sygnału złożonego. Rozkład widma zależy od charakteru sygnału
złożonego. Rozpatrzymy tu widma częstotliwości dla trzech grup sygnałów, a mianowicie dla
sygnałów okresowych, akustycznych i impulsowych.
Sygnał okresowy posiada regularne widmo prążkowe składające się ze skończonej lub
nieskończonej sumy sygnałów prostych (sinusoidalnych), o częstotliwościach będących
wielokrotnościami częstotliwości podstawowej sygnału złożonego. Suma ta będzie zawierała prążek o
częstotliwości zerowej, jeśli w sygnale złożonym występowała składowa stała. W zależności od
kształtu sygnału złożonego w widmie mogą występować harmoniczne tylko parzyste, tylko
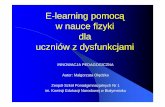
nieparzyste bądź zarówno parzyste jak i nieparzyste. Jako przykład na rys. 6.5.10 przedstawiono
widmo sygnału prostokątnego bez składowej stałej, o częstotliwości f0.
Rys. 1.14
Jak wynika z rysunku, w przypadku sygnału prostokątnego widmo składa się z
harmonicznych nieparzystych. Brak składowej stałej w sygnale powoduje brak prążka o
częstotliwości zerowej. Aczkolwiek ilość prążków w widmie jest nieskończenie wielka, to
jednak z uwagi na szybkie malenie wyższych harmonicznych, pod uwagę wystarczy wziąć
f [Hz]
U
Tf
10 t
T
f f0 3f0 5f0 7f0 9f0

maksymalnie dziesięć pierwszych harmonicznych, a więc pasmo zajmowane przez ten sygnał
rozciąga się praktycznie od fo do 9fo.
Podobny charakter ma widmo sygnału trójkątnego, również występują w nim harmoniczne
nieparzyste. Natomiast sygnały na wyjściach prostowników jedno lub dwupołówkowych
posiadają widmo składające się z harmonicznych parzystych. Oczywiście istnieją również
sygnały okresowe zawierające w widmie zarówno harmoniczne parzyste jak i nieparzyste.
Sygnał akustyczny składa się z wielu nałożonych na siebie dźwięków. Każdy z tych dźwięków
posiada określoną częstotliwość (wysokość tonu) oraz zawiera pewne harmoniczne, będące
wielokrotnościami częstotliwości podstawowej, które określają jego barwę. Widmo tego sygnału
będzie się więc składało z wielu nieregularnie rozłożonych prążków przedstawiających amplitudy
dźwięków składowych oraz ich harmonicznych. Na rys. 1.15. przedstawiono przykładowe widmo
sygnału akustycznego składające się z dwóch dźwięków, łącznie z ich harmonicznymi.
Rys..1.15 Widmo sygnału harmonicznego.
Sygnał akustyczny zawiera częstotliwości teoretycznie w paśmie 20 do 20 000 Hz. Szczególnie
istotna jest maksymalna częstotliwość tego sygnału. W praktyce zależy ona od technicznych
możliwości zapisu i odtwarzania dźwięków oraz pewnych uregulowań prawnych związanych z
systemem transmisji. I tak:
dla sygnałów naddawanych na VHF z modulacją częstotliwości fmax = 15 000 Hz
dla sygnałów naddawanych na MF i HF z modulacją amplitudy fmax = 4 500 Hz
dla sygnałów naddawanych w ramach łączności morskiej fmax = 2 800 Hz
Oczywiście im szersze pasmo nadawanych częstotliwości, tym lepsza jakość dźwięku.
Sygnał impulsowy posiada widmo ciągłe rozciągające się teoretycznie od zera do
nieskończoności. W praktyce części składowe widma o bardzo dużych częstotliwościach posiadają tak
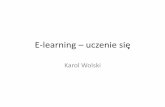
małe amplitudy, że można nie brać ich pod uwagę. Jako przykład tego typu widma na rys 1.16
przedstawiono pojedynczy impuls prostokątny o czasie trwania i jego widmo.
Widmo
f
f1 2f1 f2 3f1 4f1 2f2 5f1 3f2 4f2

Rys. 1.16. Sygnał i widmo sygnału inpulsowego.
Na powyższym rysunku pokazano cztery grupy zawierające częstotliwości składowe widma
impulsu prostokątnego. W rzeczywistości grup tych jest nieskończenie wiele, jednak dalsze części
widma mają tak małe amplitudy, że można nie brać ich pod uwagę. Ponieważ szerokość grupy jest
odwrotnie proporcjonalna do czasu trwania impulsu , więc cały brany pod uwagę zakres widma
również zależy od czasu trwania impulsu. Im krótszy impuls, tym szersze jest jego widmo
częstotliwości.
2. Wielkości fizyczne i ich jednostki miar stosowane najczęściej w elektronice
Jednostka miary jest to umownie przyjęta wartość danej wielkości fizycznej, która służy do
porównywania ze sobą innych wartości tej samej wielkości. Zbiór jednostek wielkości mierzalnych
nosi nazwę układu jednostek miar. Obecnie obowiązuje Międzynarodowy Układ Jednostek Miar
(Système International d’Unitès), w skrócie nazywany układem SI. Układ ten zawiera 7 jednostek
podstawowych i 2 jednostki uzupełniające (tab. 2.1), jednostki pochodne spójne z jednostkami
podstawowymi i uzupełniającymi oraz przedrostki służące do tworzenia jednostek wielokrotnych i
podwielokrotnych (tab. 2.2).
U
t U
f 0 2/ 4/ 6/ 8/

Tabela 2.1. Jednostki miar podstawowe i uzupełniające układu SI
Wielkość
Jednostka
nazwa
oznaczenie
Długość
Masa
Czas
Natężenie prądu elektrycznego
Temperatura (termodynamiczna)
Światłość
Liczność (ilość) materii
metr
kilogram
sekunda
amper
kelwin
kandela
mol
m
kg
s
A
K
cd
mol
podstawowe
Kąt płaski
Kąt bryłowy
radian
steradian
rad
sr
uzupełniające
Tabela 2.2. Przedrostki i oznaczenia do tworzenia jednostek miar wielokrotnych i podwielokrotnych układu SI
Przedrostek Oznaczenie Mnożnik Eksa
Peta
Tera
Giga
Mega
Kilo
Hekto
Deka
E
P
T
G
M
k
h
da
1 000 000 000 000 000 000 = 1018
1 000 000 000 000 000 = 1015
1 000 000 000 000 = 1012
1 000 000 000 = 109
1 000 000 = 106
1 000 = 103
100 = 102
10 = 101
Decy
Centy
Mili
Mikro
Nano
Piko
Femto
Atto
d
c
m
μ
n
p
f
a
10 –1
= 0,1
10 –2
= 0,01
10 –3
= 0,001
10 –6
= 0,000 001
10 –9
= 0,000 000 001
10-12
= 0,000 000 000 001
10-15
= 0,000 000 000 000 001
10-18
= 0,000 000 000 000 000 001
Podstawową zaletą układu SI jest to, że każdą z jednostek pochodnych można wyrazić za pomocą
iloczynu potęg jednostek podstawowych i uzupełniających, przy czym współczynnik liczbowy w tym
wyrażeniu jest równy 1.
Przykłady:
0,025 [A] = 25 [mA]
0,000000007 [F] = 7 [nF]
36000000 [Hz] = 36 [MHz]
Niektóre jednostki pochodne układu SI mają swoje własne nazwy, np. jednostka ładunku –
kulomb [C] itp. W tabeli 2.3. zestawiono jednostki wielkości elektrycznych i magnetycznych układu
SI najczęściej stosowane w elektronice.

Tabela 2.3. Jednostki miar wybranych wielkości elektrycznych i magnetycznych układu SI
Wielkość
Jednostka
Zależności między
jednostkami
nazwa
oznaczenie
Ładunek elektryczny
Napięcie elektryczne
Pojemność elektryczna
Rezystancja
Konduktancja
Indukcyjność
Indukcja magnetyczna
Strumień magnetyczny
Przenikalność elektryczna
Przenikalność magnetyczna
Moc
Energia, praca, ciepło
Częstotliwość
kulomb
wolt
farad
om
simens
henr
tesla
weber
farad na metr
henr na metr
wat
dżul
herc
C
V
F
Ω
S
H
T
Wb
F/m
H/m
W
J
Hz
1C = 1A·s
(1A·h = 3600 C)
1V = 1W/A
1F = 1C/V
1Ω = 1V/A
1S = 1/Ω
1H = 1V·s/A
1T = 1Wb/m2
(1Gs = 10-4
T)
1W = 1V·A
1J = W·s
1Hz = 1/s
Często wzmocnienie napięciowe lub wzmocnienie mocy pewnego układu elektronicznego wyraża
się za pomocą jednostki zwanej decybelem. Wzmocnienie napięciowe oraz wzmocnienie mocy liczy
się ze według wzoru:
gdzie Pwe i Uwe są mocą i napięciem wejściowym, Pwy i Uwy mocą i napięciem wyjściowym a kp i ku
wzmocnieniem mocy, wzmocnieniem napięcia wyrażonym w dB.
Uzupełnieniem układu jednostek jest tab. 2.4., w której zestawiono najważniejsze stałe fizyczne.
dBP
Pk
we
wy
p
10log10
dBU
Uk
we
wy
u
10log20

Tabela 2.4. Wybrane stałe fizyczne
Wielkość Oznaczenie Wartość Jednostka Ładunek elementarny e -1,6022·10
-19 C
Masa spoczynkowa elektronu me 9,1091·10-31
kg
Masa spoczynkowa protonu mp 1,6725·10-27
kg
Masa spoczynkowa neutronu mn 1,6748·10-27
kg
Stała Plancka h 6,6262·10-34
J·s
Stała Boltzmanna k 1,3807·10-23
J/K
Prędkość światła w próżni c0 2,9979·10+8
m/s
Przenikalność magnetyczna próżni μ0 4π·10-7
H/m
Przenikalność elektryczna próżni ε0 8,8541·10-12
F/m
W radiokomunikacji często operuje się pojęciem fali elektromagnetycznej. Najczęściej stosowane
parametry fali elektromagnetycznej to częstotliwość f wyrażana w hercach i długość fali wyrażana w
metrach. Zależność między nimi wyraża wzór:
][mf
cTc
gdzie c jest prędkością rozchodzenia się fali elektromagnetycznej wynoszącą w przybliżeniu c
3·10+8
m/s, a T okresem fali równym:
][1
sf
T
Można przyjąć, że prędkość rozchodzenia się fali elektromagnetycznej w powietrzu jest taka
sama jak w próżni i wynosi tyle samo co prędkość światła.
W tabeli 1.5 przedstawiono symbole graficzne niektórych częściej stosowanych elementów
elektronicznych.

Zadania do wykonania
1. Scharakteryzuj podstawowe wielkości elektryczne. Podaj ich symbole literowe
i jednostki.
2. Podaj treść prawa Ohma.
3. Wymień i krótko scharakteryzuj podstawowe elementy elektryczne ( symbole
literowe, graficzne, jednostki).
4. Podaj wzór na moc w układach elektrycznych.. Jak jest jednostka mocy ?
5. Na rysunku przedstawiono schemat układu elektrycznego. Prąd o jakim natężeniu I
płynie przez obwód ?
6. Na rysunku przedstawiono schemat układu elektrycznego. Jaka moc wydzieli się na
rezystorze R ?
7. Na rysunku przedstawiono schemat układu elektrycznego. Prąd o jakim natężeniu I
płynie przez obwód ?
8. Na rysunku przedstawiono schemat układu elektrycznego. Prąd o jakim natężeniu I
płynie przez obwód ?
9. Radiostacja okrętowa zasilana jest napięciem U = 24V. Maksymalna moc radiostacji
wynosi P = 600W. Jaki maksymalny prąd Imax popłynie przez radiostację ?.
U = 12 V
I = ?
R = 100
U = 24 V
I
R = 80
U = 10 V
R1= 10
R2= 40
I = ?
U = 10 V
R1 = R2 = 20 I = ?
R1 R2

10. Mostek na statku zasilany jest napięciem zmiennym o wartości U = 230 V. Na mostku
zamontowano zabezpieczenia prądowe Imax = 25 A. Urządzenia o jakiej w sumie
mocy Pmax możemy podłączyć na mostku ?
11. Narysuj i podaj parametry sygnału sinusoidalnego. Narysuj jego widmo
częstotliwościowe.
12. Narysuj i podaj parametry sygnału prostokątnego. Narysuj jego widmo
częstotliwościowe. Gdzie tego typu sygnału są stosowane ?
13. Narysuj i podaj parametry sygnału trójkątnego. Narysuj jego widmo
częstotliwościowe. Gdzie tego typu sygnału są stosowane ?
14. Narysuj sygnał sinusoidalny o amplitudzie U = 10 V i częstotliwości f = 10 kHz. Jaki
jest okres przebiegu T ? Narysuj widmo tego sygnału.
15. Narysuj sygnał sinusoidalny o amplitudzie U = 5 V, częstotliwości f = 1 kHz i
składowej stałej wynoszącej U = 10 V. Jaki jest okres przebiegu T ? Narysuj widmo
tego sygnału.
16. Podaj zależność pomiędzy długością fali a jej częstotliwością.
17. Częstotliwość fali radiowej wynosi f = 1 MHz. Jaka jest długość fali ( c = 3·108 m/s)
?
18. Zakładając, że długość anteny nadawczej powinna być równa długości fali oszacuj,
jaka powinna być długość anteny pracującej w morskim paśmie VHF (156-174MHz) ?
19. Radar morski z pasm X pracuje na częstotliwości f = 9GHz. Jak jest długość fali
radarowej ?
20. Scharakteryzuj widmo sygnału akustycznego.