Zawierają pliki: SI, Newton, Drgania, Coulomb, Amper, Einstein, Planck, Schrödinger
Małe drgania wokół położenia
równowagi.
Potencjał układu wykonującego małe drgania
Analizujemy układy dla których potencjał V(q=q1,q2,…..,qf ) posiada minimum dla określonych wartości współrzędnych uogólnionych qi ( i=1,2,…f-liczba stopni swobody), któremu to położeniu odpowiada stabilne położenie równowagi. Możemy dokonać transformacji tych współrzędnych tak by w położeniu tym
wszystkie współrzędne były równe zeru qi=0 skąd wynika iż
Dodatkowo korzystając z dowolności wyboru potencjału z dokładnością do stałej przyjmujemy iż V(q=0)=0.
Dalej zakładamy iż potencjał jest opisany jednorodną funkcją kwadratową
współrzędnych uogólnionych
Relacja taka może być spełniona ścisłe lub też w sposób przybliżony w przypadku gdy w trakcie ruchu układ jest blisko położenia równowagi. Wówczas rozwijając potencjał w szereg Taylora i pomijając wyrazy proporcjonalne do iloczynu trzech
i więcej współrzędnych uogólnionych dostajemy
∑∑∑∑
∑∑∑
= == =
= ==
==∂∂
∂≈
≈+=∂∂
∂+=
∂
∂+==
f
k
f
l
lkkl
f
k
f
l
lk
lk
f
k
f
l
lk
lk
f
k
k
k
qqKqqqqq
V
qqqqq
Vqq
q
VqVqV
1 11 1
2
1 1
2
1
2
1)0(
2
1
....)0(2
1)0()0()(
( ) ),.,,1(00 fiqq
V
i
===∂
∂
gdzie )0(2
=∂∂
∂== q
VKK
lk
lkkl
∑∑= =
=f
k
f
l
lkkl qqKqV1 12
1)( lkkl KK =gdzie
stałe
Energia kinetyczna układu wykonującego małe drgania
Przyjmujemy ponadto iż energia kinetyczna T jest jednorodną funkcją kwadratową
prędkości uogólnionych
Relacja taka zachodzi zawsze gdy w układzie w którym opisujemy ruch zależności współrzędnych kartezjańskich od uogólnionych nie zawierają explicite czasu czyli
Wówczas
gdzie
Dalej wprowadzamy przybliżenie
Gdy zależą od współrzędnych uogólnionych q to przyjmujemy za Mkl ich
wartości dla q=0 (uwzględniamy fakt iż zarówno współrzędne jak i prędkości uogólnione są małe w trakcie ruchu). Przy tych założeniach
( ) ( ) lf
l
f
k
kkl qqqaqqT &&& ∑∑= =
=1 12
1,
Mkl- stałe nie zależne od współrzędnych i prędkości uogólnionych określone jako
akl(q=0) , Mkl=Mlk
( ) ( )qaqa lkkl =
( )qxx jj =
l
f
l l
j
j qq
xx && ∑
= ∂
∂=
1
∑∑∑= ==
==f
k
f
l
lkkl
n
j
jjqqqa
xmT
1 1
3
1
2
)(2
1
2&&
&
l
jn
j k
j
jklq
x
q
xmqa
∂
∂
∂
∂=∑
=
3
1
)(
( ) lf
l
f
k
kkl qqMqTT &&& ∑∑= =
==1 12
1
kla
)0()( ==≈ qaMqa klklkl
( )
∑∑
∑
==
=
−=⇒==∂
∂−
∂
∂
−=−=
f
l
ljl
f
l
ljl
jj
f
lk
lkkllkkl
qKqMfjq
L
q
L
dt
d
qqKqqMVTL
11
1,
,,2,1,0
2
1
&&K&
&&
Funkcja Lagrange’a i równania Lagrange’a II rodzaju układu wykonującego małe drgania
Funkcja Lagrange’a
Równania Lagrange’a II rodzaju
Wprowadźmy macierze symetryczne i rzeczywiste czyli macierze będące macierzami
hermitowskimi
l
f
l
f
k
kkl qqMT &&∑∑= =
=1 12
1 lkkl MM =
Macierze te są dodatnio określone czyli dla dowolnej rzeczywistej macierzy
kolumnowej x≠0 mamy ( xT- macierz transponowana).
Wynika to z faktu iż dla dowolnych wartości współrzędnych i prędkości uogólnionych
w pobliżu położenia równowagi (gdy ) zachodzi
01 1
>∑∑= =
f
k
f
l
lkkl qqK01 1
>∑∑= =
f
k
f
l
lkkl qqM &&
qq &,
∑∑= =
=f
k
f
l
lkkl qqKV1 12
1
lkkl KK =Mkl,Kkl--stałe
( ) ∑∑
∑ ∑
==
= =
=
+=
=
+=
∂
∂
f
l
ljl
f
l
lljjl
f
l
f
k
kkjljl
j
qMqMM
qMqMq
L
11
1 1
2
1
2
1
&&
&&&
0≠q& 0≠q
[ ] [ ]
==
==
ffff
f
f
kl
ffff
f
f
kl
KKK
KKK
KKK
KK
MMM
MMM
MMM
MM
21
22221
11211
21
22221
11211
ˆˆ
0ˆ,0ˆ >> xKxxMx TT
( )
( )( )
( )
( ) ( )ϕωϕω +=+
=
= tCt
C
C
C
tq
tq
tq
tq
ff
coscos2
1
2
1
MM
Rozwiązania równań Lagrange’a poszukujemy w postaci
Po wstawieniu zapostulowanej postaci rozwiązań do równań Lagrange’a
uwzględniając to iż otrzymujemy równanie:
Równanie to ma niezerowe rozwiązania C≠0 pod warunkiem, że
Równanie charakterystyczne
( )[ ]
[ ]fT
f
T
fff
TT
qqqq
qqqq
q
q
q
q
q
q
q
q
q
q
q
qqKqMqKqqMqL
&&&&&&
&&
&&
&&
&
&
&
&M
&&&&
21
212
1
2
1
2
1
,,gdzie,ˆˆ,ˆˆ2
1
=
=
=
=
=−=−=
Zapisane przy pomocy tych macierzy funkcja Lagrange’a i równania Lagrange’a mają postać
Rozwiązując to równanie można określić f dozwolonych częstości ωi drgań układuSymetryczność i dodatnia określoność macierzy i zapewnia to iż (i=1,..,f)
są rzeczywiste oraz czyli częstości drgań są rzeczywiste.
gdzie
=
fC
C
C
CM
2
1
qq 2ω−=&& ( ) ( )ϕωϕωω +−=+− tCKtCM cosˆcosˆ2
02 >iω
M̂ K̂2
iω
( ) 0ˆˆ 2 =− CMK ω
( ) 0ˆˆdet 2 =− MK ω
które musi być spełnione dla dowolnego czasu t skąd wynika równanie:
Dla każdej częstości (i=1….,f) można znaleźć relacje między elementami
macierzy kolumnowej z równania
Gdy wszystkie częstości są różne to równanie te pozwala na wyznaczenie elementów
macierzy C(i) ( która może być rzeczywista ) z dokładnością do jednej stałej.
Gdy za stałą dowolną wybierzemy element (co jest możliwe gdy ) to zależności od czasu współrzędnych q1,…,qf związane z drganiem o częstości
gdzie
przy czym gdzie wyznacznik macierzy powstałej przez
skreślenie 1 wiersza i j kolumny w macierzy
Ogólna zależność q1,…,qf od czasu ma postać superpozycji drgań normalnych o różnych
częstościach
Wielkości to współrzędne normalne (zwykle się je dodatkowo przeskalowuje). 2f stałych dowolnych oraz można wyznaczyć z warunków początkowych ruchu. Możliwy jest ich dobór tak by obserwowane było drganie o jednej częstości
iω
=
)(
)(
2
)(
1
)(
i
f
i
i
i
C
C
C
CM
( ) 0ˆˆ )(2 =− ii CMK ω
)(.
)( iozn
i
m AC = 0)( ≠imC
0≠iω
( )[ ] iijiiiijij utAq ~~
cos~ )()()()( ∆=+∆= ϕω )(
)(
)(~i
m
i
ji
jC
C=∆
( )( ) )(1
)(1
)(
1
1~i
m
m
i
j
j
i
j∆−
∆−=∆
+
+
)(i
j∆
MK iˆˆ 2ω−
( )iii
i tAu ϕω += cos~ )(
∑∑==
∆==f
i
i
i
j
f
i
i
jj uqq1
)(
1
)( ~~
)(iA
iu~
iϕ
Ogólne rozwiązanie opisujące drgania (gdy dla każdego i ) można zapisać też
oczywiście w postaci
z macierzami kolumnowymi spełniającymi równanie (*)
Gdy niektóre z częstości drgań są jednakowe np. to wówczas nakłada się
na i dodatkowy warunek: gdzie
Gdy warunek powyższy jest spełniony automatycznie. Warunek ten razem z warunkiem (*) zapewnia możliwość określenia wszystkich elementów macierzy z
dokładnością do jednej stałej także wówczas gdy i przedstawienia drgań w postaci superpozycji drgań normalnych o jednakowych lub różnych częstościach
Moduł stałej można interpretować jako amplitudę drgań współrzędnej qj podczas drgań harmonicznych zachodzących z częstością .
Ewentualny przeciwny znak stałych i oznacza że w i-tym modzie drgańzachodzącym z częstością zmiany współrzędnych qj oraz qk wynikają z drgańzachodzących w przeciwnych fazach , zaś jednakowy znak obu stałych oznacza iżzmiany tych współrzędnych w tym modzie wynikają z drgań zachodzących w tej samej fazie
( ) ( )∑∑==
+=⇒=+=f
i
ii
if
i
ii
i
jj tCqfjtCq1
)(
1
)( cos,....,2,1cos ϕωϕω
)( jC
)(iC 0ˆ)()( =iTj CMC
ji ωω =
[ ])()(1)( ,........ jfjTj CCC =
ji ωω ≠
0≠iω
( ) 0ˆˆ )(2 =− ii CMK ω
=
)(
)(
2
)(
1
)(
i
f
i
i
i
C
C
C
CM
ji ωω =
)(iC
)(i
jC
iω)(i
jC )(ikC
iω
ij ≠
Dygresja: Gdy jedna z częstości np. m-ta co jest możliwe gdy dla pewnego
zestawu współrzędnych q z otoczenia q=0 ( z których nie wszystkie się zerują )
mamy (macierz K nie jest określona dodatnio ale ,,nieujemnie’’) to
zależność m-tej współrzędnej normalnej od czasu może być opisana funkcją liniową
czasu . Opisywany mod nie odpowiada wówczas drganiom lecz ruchowi (najczęściej
translacyjnemu) układu zachodzącemu w sposób nie zmieniający energii potencjalnej
układu. Wówczas w ogólnym rozwiązaniu należy zastąpić przez wyraz
gdzie - stała zależna od warunków początkowych ruchu.
01 1
=∑∑= =
f
k
f
l
lkkl qqK
0=mω
( )mmt ϕω +cosmt γ+ mγ
Informacje dla zainteresowanych (slajdy 10-11)
Dowód iż częstości drgań są rzeczywiste(nie korzystamy z założenia iż macierz jest rzeczywista)
Pokazujemy iż liczba jest rzeczywista gdzie oznacza macierz transponowaną i sprzężoną w sposób zespolony do macierzy A pokazując iż zachodzi
Podobnie można pokazać iż czyli liczba
jest także rzeczywista
Dalej można pokazać iż ponieważ
to
( )( ) ( ) )(*)(*)(*)( ˆˆ iTiiTi CKCCKC =( )( ) ( )( ) ( )( )( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) )(*)(**)(**)(*)(*)(
*)(*)(
*)(*)(
*)(*)(
ˆˆˆˆˆˆˆˆˆ
ˆˆˆ
iTiTTiTTi
TiTiTTT
T
TiTiiTiiTi
CKCCKCCKCABCCBA
CKCCKCliczbaCKC
==⇒=
=⇒=
( ) *TA
( )( ) ( ) )(*)(*)(*)( ˆˆ iTiiTi CMCCMC =
( ) 0ˆˆ )(2 =− ii CMK ω( ) ( ) ( ) )(*)(2)(2*)()(*)( ˆˆˆ iTiiii
TiiTiCMCCMCCKC ωω ==
Ponieważ macierze i są określone dodatnio i rzeczywiste to dla dowolnych
zachodzi
a zatem z relacji (*) wynika iż a zatem są rzeczywiste i różne od
zera (można je przyjąć jako liczby dodatnie)
0ˆ )(*)( >iTi CKC0ˆ )(*)( >iTi CMC
(*)
02 >iω
M̂
( ) )(*)( ˆ iTi CKC)(i
C
A zatem są liczbami rzeczywistymi2
iω
iω
( ) )(*)( ˆ iTi CMC
K̂0)( ≠iC
-symetryczna i
rzeczywista K̂
(Dygresja : W układach w których może też zajść
dla pewnego i np. i=m i wówczas częstość )
Analogiczny dowód tego iż opiera się na tym iż wokół położenia
równowagi dla dowolnych zachodzi )
Dowód tego iż gdy
Wszystkie wyrazy macierzy można przyjąć w postaci liczb rzeczywistychJeżeli macierz zespolona spełnia równanie
a macierze oraz a także wielkości są rzeczywiste to również
macierze oraz kombinacje liniowe oraz
spełniają to równanie. Przy tym macierze oraz są
rzeczywiste a jedna z nich jest na pewno różna od zera. A zatem macierz
spełniająca równanie można przyjąć jako rzeczywistą
)(iC
)(iC
( ) 0ˆˆ )(2 =− ii CMK ω
K̂ M̂2
iω
( )*)(iC ( )*)()( ii CC + ( )( )*)()( ii CCi −( )*)()( ii CC + ( )( )
*)()( iiCCi −
( ) 0ˆˆ )(2 =− ii CMK ω0)( ≠iC
0ˆ )(*)( >iTi CKC
0ˆ )(*)( >iTi CMC
[ ] [ ])()()()()()()()(
)()()()()()()()()(*)(
ImˆImReˆReImˆReReˆIm
ImˆImReˆReImReˆImReˆ
iTiiTiiTiiTi
iTiiTiiiTiTiiTi
CMCCMCCMCiCMCi
CMCCMCCiCMCiCCMC
+=+−
++=+−=
Ponieważ dla dowolnych mamy
to dla dowolnych
02
1
1 1
>= ∑∑= =
f
k
f
l
lkkl qqMT &&
0ImˆImReˆRe)(*)()(*)( >+ iTiiTi CMCCMC
0≠q&
01 1
≥∑∑= =
f
k
f
l
lkkl qqK 0ˆ)(*)( =iTi CKC
01 1
>∑∑= =
f
k
f
l
lkkl qqK0≠q
( ) ( ) 0ˆ/ˆ )(*)()(*)( == mTmmTmm CMCCKCω
0)( ≠iC )(*)( ˆ iTi CMC -liczba rzeczywista
0)( ≠iC
0ˆ)()( =iTj CMCDowód iż gdy ji ωω ≠
( ) )()(2)(2)()()()(2 ˆˆˆ0ˆˆ iTjiiiTjiTjii CMCCMCCKCCMK ωωω ==⇒=−
( ) ( ) ( )( ) )()(2)()(2)()(2
)()(2)()()()()()(
ˆˆˆ
ˆˆˆˆ
iTj
j
iTTj
j
iT
j
j
iT
j
j
iT
jiT
jTiTj
CMCCMCCCM
CCMCCKCCKCKC
ωωω
ω
===
===
)()(2)()(2)()( ˆˆˆ iTjj
iTj
i
iTjCMCCMCCKC ωω ==
Zakładamy iż i są macierzami rzeczywistymi i symetrycznymi . Zakładamy też iż macierze i są rzeczywiste Można pokazać iż
Z drugiej strony
A zatem
W przypadku gdy równość
może być spełniona tylko wówczas gdy
ji ωω ≠ ( ) ( ))()(2)()(2 ˆˆ iTjjiTji CMCCMC ωω =0ˆ )()( =iTj CMC
K̂ M̂)(iC TiC )(
( ) TTT ABBA ˆˆˆˆ = ( ) 0ˆˆ )(2 =− jj CMK ω
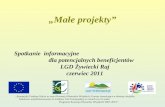
Przykład
1α
2α
y
x
1m1
m2
2
1l
2l
111 cosαly −=
111 sinαlx =
22112 sinsin αα llx +=
22112 coscos αα lly −−=
( ) 1111 cos αα && lx =
( ) 1111 sin αα && ly =
( ) ( ) 2221112 coscos αααα &&& llx +=
q1=α1,q2=α2 –współrzędne uogólnione
( ) ( )
( ) ( ) ( ) ( ) ( )[ ]
( ) ( ) 212121222222121221211
212121212
2
2
2
2
2
1
2
122
1
2
11
2
2
2
222
1
2
11
cos22
sinsincoscos22
22
ααααααα
ααααααααα
&&&&&
&&&&&
&&&&
−+++=
=++++=
=+++=
llmllm
lm
llmllm
lm
yxm
yxm
T
Energia kinetyczna
( ) ( ) 2221112 sinsin αααα &&& lly +=
Zbadanie ruchu wahadła podwójnego o l1=l
2=l i m
1=m
2=m w przybliżeniu
małych drgań
W położeniu równowagi α1=α2=0
W celu możliwości zapisu w postaci wzoru ogólnego
trzeba korzystając z faktu iż dokonać przybliżenia
co prowadzi do wyniku
( ) ( ) 212121222222121221211 cos22
ααααααα &&&&& −+++= llmllm
lm
T
1,1 21
W celu możliwości zapisu w postaci wzoru ogólnego
trzeba korzystając z faktu iż dokonać przybliżeń
co prowadzi do wyniku
A zatem
Energia potencjalna
( ) ( ) ( )[ ]=+−−==+=
22112111
2211
coscoscos ααα llgmglm
gymgymV
( ) constKKKKV ++++= 12212112222221112
1αααααα
1,1 21
( ) ( )ϕωϕωα
αα +
=+=
= t
C
CtC coscos
2
1
2
1
=
=
mgl
mgl
KK
KKK
0
02ˆ
2221
1211
=
=
22
22
2221
1211 2ˆmlml
mlml
MM
MMM
02
1
2
1
2
1
2
1
=+⇔−= ∑∑∑∑==== l
lkl
l
lkl
l
lkl
l
lkl KMKM αααα &&&&
Równania Lagrange’a II rodzaju
można zapisać w postaci
Ich rozwiązania poszukujemy w postaci
Po wstawieniu ich do równań
Lagrange’a II rodzaju otrzymujemy
układ 2 równań
00 222
1
2
222121222121 =++⇒=+++ ααααααα mglmlmlKKMM &&&&&&&&
( ) ( )( ) ( )ϕωωαϕωα
ϕωωαϕωα
+−=⇒+=
+−=⇒+=⇒
tCtC
tCtC
coscos
coscos
2
2
222
1
2
111
&&
&&
( )[ ] ( ) 0cos22 222122 =+−− ϕωωω tCmlCmlmgl( )[ ] ( ) 0cos222122 =+−+− ϕωωω tCmlmglCml
( ) ( ) mglmglmglmlmlmlmlVTL 322
12
2
1 22
2
112
2
21
22
2
22
1
2 ++−+++≈−= αααααααα &&&&&&
0220 122
1
2
212111212111 =++⇒=+++ ααααααα mglmlmlKKMM &&&&&&&&
00 212
2
2
22
=++⇒=∂
∂−
∂
∂ααα
ααmglmlml
LL
dt
d&&&&
&
0220 122
1
2
11
=++⇒=∂
∂−
∂
∂ααα
ααmglmlml
LL
dt
d&&&&
&
k=1
k=2
=
=
22
22
2221
1211 2ˆmlml
mlml
MM
MMM
Otrzymaliśmy układ równań jednorodnych na współczynniki C1 i C2 o postaci
Ma on rozwiązanie niezerowe tylko wówczas gdy
Dozwolone częstości drgań ω spełniają warunek
( )( ) 02
0ˆˆdet
442222
2
=−−⇒
⇒=−
ωω
ω
lmmlmgl
MK
( )[ ] ( ) ( ) 0220cos22 222122222122 =−−⇒=+−− CmlCmlmgltCmlCmlmgl ωωϕωωω
( )[ ] ( ) ( ) 00cos 222122222122 =−+−⇒=+−+− CmlmglCmltCmlmglCml ωωϕωωω
( ) 022ˆˆdet2222
2222
2 =−−
−−=−
ωω
ωωω
mlmglml
mlmlmglMK
=
=
mgl
mgl
KK
KKK
0
02ˆ
2221
1211
( ) 022ˆˆ2
1
2222
2222
2 =
⋅
−−
−−=−
C
C
mlmglml
mlmlmglCMK
ωω
ωωω
( ) 22222 ωω mlmlmgl −=−
( ) 22222 ωω mlmlmgl =−
Macierze odpowiadające ωi wyznaczamy z dokładnością do stałej z
równania
=
)1(
2
)1(
1)(
C
CC
i
( )
=⇒=⇒=
⋅
+−−−
−−+−⇒−==
)2(
1
)2(
1)2()2(
1
)2(
2)2(
2
)2(
1
22
20)21()22(
)22()21(222
C
CCCC
C
C
mglmgl
mglmgl
l
gωω
Pełne rozwiązanie będące superpozycją drgań o znalezionych częstościach ma postać
zależną od stałych , które można wyznaczyć z warunków początkowych
ruchu
( ) ( ) ( ) ( )22)2(1
)2(
1
11)1(
1
)1(
1
22
)2(
11
)1(
2
1cos
2cos
2coscos ϕωϕωϕωϕω
α
αα +
++
−=+++=
= t
C
Ct
C
CtCtC
( ) 22222 ωω mlmlmgl −=−
( ) 22222 ωω mlmlmgl =−
( )221 +=l
gω
( )222 −=l
gω
( ) 122
12
22 +=−
=l
g
l
gω
( ) 122
12
22 −=+
=l
g
l
gω
( ) 022ˆˆ)(
2
)(
1
2222
2222
)(2 =
⋅
−−
−−=−
i
i
ii
iii
iC
C
mlmglml
mlmlmglCMK
ωω
ωωω
( )
−=⇒−=⇒=
⋅
−−+−
+−−−⇒+==
)1(
1
)1(
1)1()1(
1
)1(
2)1(
2
)1(
1
12
20)21()22(
)22()21(222
C
CCCC
C
C
mglmgl
mglmgl
l
gωω
2
)2(
11
)1(
1 ,, ϕϕ CC
( ) ( ) 10/20,10/0 21 παπα ==== tt
( ) ( ) 00,00 21 ==== tt αα &&l =1m
0,10
,0,0 2)2(
11
)1(
1 ====⇒ ϕπ
ϕ CC
( ) ( ) 10/20,10/0 21 παπα −==== tt
( ) ( ) 00,00 21 ==== tt αα &&l =1m
0,0,0,10
2
)2(
11
)1(
1 ====⇒ ϕϕπ
CC
( ) ( ) 00,10/0 21 ==== tt απα
( ) ( ) 00,00 21 ==== tt αα &&
l =1m
Małe drgania wokół
położenia równowagi-współrzędne normalne.
( ) ( )
[ ] [ ]
[ ] [ ]
==
==
==
=
=−=−=−= ∑=
ffff
f
f
kl
ffff
f
f
kl
f
T
f
T
ff
TTf
lk
lkkllkkl
KKK
KKK
KKK
KK
MMM
MMM
MMM
MM
qqqqqqqq
q
q
q
q
q
q
q
qqKqqMqqqKqqMVTL
21
22221
11211
21
22221
11211
2121
2
1
2
1
1,
ˆˆ
gdzieˆˆ2
1
2
1
&&&&
&
M
&
&
&M
&&&&
Funkcja Lagrange’a w przybliżeniu małych drgań
Równania Lagrange’a II rodzaju
A ich rozwiązania można zapisać w postaci superpozycji drgań normalnych
zachodzących z częstościami spełniającymi równanie
Poszukujemy nowych współrzędnych uogólnionych (i=1,…,f) w których równania te
przyjmą postać .Problem ten sprowadza się do znalezienia
transformacji diagonalizującej jednocześnie macierze M i K. Dodatkowo zwykle
żądamy by macierz M po diagonalizacji była jednostkowa, a elementy macierzy K po
diagonalizacji były równe kwadratom częstości drgań dzięki czemu
iu02 =+ iii uu ω&&
( )∑=
−=f
k
kkk uuL1
222
2
1ω&
2
iω 0)ˆˆdet(2 =− MK iω
lkkl MM = lkkl KK =
0ˆˆ,,2,1,011
=+⇒+⇒==∂
∂−
∂
∂∑∑
==
qKqMqKqMfjq
L
q
L
dt
d f
l
ljl
f
l
ljl
jj
&&&&K&
Informacje dla zainteresowanych (slajdy 26-32)
( ) ( )
( )
( ) ( ) ( )
( ) ( )iif
i
if
i
ii
iT
TTTT
TT
TTTTTT
TTTT
TTT
tCtCRqRqRKRRKRK
qKqqMqqRRKRqRqRRMRqR
qRRKRRqqRRMRRq
qRRKRRqqRRMRRqqKqqMqL
RMRRMRRMRMRR
ϕωϕω +=+=≡′=≡′
′′′−′′′=
−=
=−=
=−=−=
===≡′=⇒
∑∑==
−
−−−−
−−
cos'cosˆˆ,ˆˆˆˆˆˆˆgdzie
ˆˆ2
1ˆˆˆˆˆˆˆˆˆˆ2
1
ˆˆˆˆˆˆˆˆˆˆ2
1
ˆˆˆˆˆˆˆˆˆˆ2
1ˆˆ2
1
ˆˆˆˆˆˆˆˆˆˆ,ˆˆ
1
)(
1
)(1
1111
*1*1
&&&&
&&
&&&&
Funkcje Lagrange’a można zapisać w postaci
macierz symetryczna rzeczywista transformacja do nowych współrzędnych
Ostatecznie funkcja Lagrange’a w nowych współrzędnych przyjmuje postać
Macierz M jest hermitowska, więc jej wartości własne są rzeczywiste. Wektory własne
odpowiadające różnym wartościom własnym są ortogonalne. Wektory własne odpowiadające tej
samej wartości własnej można zortogonalizować. A zatem istnieje możliwość znalezienia f
wektorów własnych ( f-wymiar macierzy) tworzących bazę ortogonalną. Ponieważ macierz M
jest hermitowska i rzeczywista to składowe wektorów własnych można wybrać tak by były
liczbami rzeczywistymi. Macierz R przejścia do bazy ortogonalnej złożona z unormowanych
ortogonalnych rzeczywistych wektorów własnych macierzy M jest unitarna i rzeczywista .
Macierz M zapisana w nowej bazie jest diagonalna.
R-macierz
unitarna
fµ
µ
µ
L
MOMM
L
L
00
00
00
2
1
Diagonalizacja macierzy M
∑∑==
′′′−′=f
lk
lkkl
f
k
kk qqKqL1,1
2
2
1
2
1&µ
Wiemy ze macierz amplitud występujących we wzorze
spełnia równanie
Mnożąc powyższe równanie lewostronnie przez macierz
i uwzględniając to iż oraz
otrzymujemy
Ponadto możemy znaleźć równanie spełnione przez macierz
amplitud występujących we wzorze
( ) 0ˆˆ )(2 =− ii CMK ω
( )∑=
+=f
i
ii
itCq
1
)( cos ϕω
( )∑=
+=f
i
ii
itCq
1
)( cos'' ϕω
)()( ˆ' ii CRC =
)(iC
( ) ( )( ) ( ) 0''ˆ'ˆ0ˆˆˆˆˆˆˆ
0ˆˆˆˆˆˆ0ˆˆˆˆˆ
)(2)(2
)(2)(12
=−⇔=−⇔
⇔=−⇔=− −
i
i
iT
i
T
iT
i
i
i
CMKCRRMRRKR
CRRMRKRCRRMKR
ωω
ωω
R̂
TRR ˆˆ 1 =− TRMRM ˆˆˆ'ˆ = TRKRK ˆˆˆ'ˆ =
fi ,..,1=
Dokonajmy kolejnej transformacji do zmiennych, w których macierz M’zostanie sprowadzona do macierzy jednostkowej
( )
flkKK
K
qKqqqqqKqqqKqL
lk
lk
klkl
TTf
lk
lkkl
f
k
k
f
lk
lkkl
f
k
kk
,,2,1,gdzie
ˆ1̂2
1
2
1
2
1
2
1
2
1
1,1
2
1,1
2
K
&&&&
=′′=′
≡′′
′′′′′′−′′′′=′′′′′′−′′=′′′−′= ∑∑∑∑====
µµ
µ
W nowych zmiennych funkcje Lagrange’a można zapisać w postaci
Ponadto
Macierz K’’ jest hermitowska, więc jej wartości własne są rzeczywiste. Wektory własne
odpowiadające różnym wartościom własnym są ortogonalne. Wektory własne odpowiadające tej
samej wartości własnej można zortogonalizować. A zatem istnieje możliwość znalezienia f
wektorów własnych ( f-wymiar macierzy) tworzących bazę ortogonalną . Ponieważ macierz K’’
jest hermitowska i rzeczywista to składowe wektorów własnych można wybrać tak by były
liczbami rzeczywistymi. Macierz Z przejścia do bazy ortogonalnej złożona z unormowanych
ortogonalnych rzeczywistych wektorów własnych macierzy K’’ jest unitarna i rzeczywista .
Macierz K’’ zapisana w nowej bazie jest diagonalna złozona z kwadratów czestości drgań .
Diagonalizacja macierzy K’’
flqq lll ,,2,1, K=′
≡″
µ
flCCi
ll
i
l ,....,1''')()( == µ
fk ,....,1=
( ) ( ) ( )
( ) ( ) ( ) 0''1̂ˆ0''0'
0'0'0'ˆˆ
)(2)(2'')(2''
)(2'')(2')(2
=−′′⇔=−⇔=−
=−⇔=−⇔=′−′
∑∑
∑∑i
i
l
i
lkliklk
l
i
llkliklk
l
i
lkllkikllk
l
i
lklkikl
i
i
CKCKCK
CKCKCMK
ωδωµµδωµ
δµµωµµδµωω
''K̂ -macierz symetryczna i rzeczywista czyli hermitowska
( )iif
i
i
ll tCq ϕω +=∑=
cos''''1
)(
( ) ( )
( )
( )∑=
−−−−
−−
−=
′′≡′′′−=
=′′′′−′′′′=′′′′′′−′′′′=
=′′=′′=′′≡′′′=⇒
f
k
kkk
TT
TTTT
f
TTT
uuL
qZuuKuuu
q"ZZKZZqqZZZZqqKqqqL
ZKZZKZZKZKZZ
1
222
1111
2
2
2
2
1
*1*1
2
1
ˆgdzie,ˆ1̂2
1
ˆˆˆˆˆˆˆ1̂ˆˆ2
1ˆ1̂2
1
00
00
00
ˆˆˆˆˆˆˆˆˆˆ,ˆˆ
ω
ω
ω
ω
&
&&
&&&&
L
MOMM
L
L
0'''
0
'''
0
''' )()()( ≠
= iii
i
iCCC
Funkcje Lagrange’a można zapisać w postaci
transformacja do nowych zmiennych
u tzw. współrzędnych normalnych
Ostatecznie funkcja Lagrange’a we współrzędnych normalnych przyjmuje postaćdiagonalną
Ponadto
i-ta współrzędna
Poprzez ciąg transformacji współrzędnych uogólnionych dokonaliśmy jednoczesnej diagonalizacji macierzy mas M i stałych sprężystości K.
Z-macierz
unitarna
Gdy nie ma dozwolonej częstości dla której to macierz odpowiadająca
częstości może mieć tylko jeden niezerowy element w wierszu i-tym. W przypadku
występowania częstości wielokrotnych można tak dobrać elementy macierzy by warunek ten
był również spełniony
kω ik ωω = )(''' iCiω
( ) ( ) ( ) 0'''0'''1̂ˆ0''1̂ˆ )(22)(2''')(2'' =−⇔=−⇔=− ikikiiii CCKCK ωωωω
)('')(''' ˆ ii CZC =
0)(''' =⇒≠ ikki Cωω fk ,....,1=
( )iif
i
i
ll tCu ϕω +=∑=
cos'''1
)(
( ) ( ) fitAtu
fiuu
ii
i
i
iii
,,2,1,cos
,,2,1,0
)(
2
K
K&&
=+=
==+
ϕω
ω
zaś równania Lagrange’a przyjmują postać
Zmiany każdej ze współrzędnych normalnych gdy są opisane funkcjąharmoniczną o ściśle określonej częstości. Wprowadzając oznaczenie
(równania dla jednowymiarowego oscylatora harmonicznego)
Poprzez transformację odwrotną można wrócić do zmiennych q
i zapisać drgania w pierwotnych współrzędnych uogólnionych q jako kombinację liniową modów normalnych
(drgania jednowymiarowego oscylatora)
Znalezione współrzędne to współrzędne normalne gdzieqWqRSZu ˆˆˆˆ ==
=
fq
q
q
qM
2
1
=
fu
u
u
uM
2
1
uZSRuWqTT ˆˆˆˆ 11 −− ==
IRRRRRSSR
RSZZSRRSZZSRWW
TT
TTT
ˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
11
1111
====
===
−−
−−−−
)()( ''' iii
CA =
0≠lω
≡
21
3
21
2
2/1
1
00
00
00
ˆ
µ
µ
µ
L
MOMM
L
L
S
We współrzędnych normalnych ( )∑=
−=f
k
kkk uuL1
222
2
1ω&
2ˆ'ˆ SM =
( ) 0ˆˆ )(2 =− ii CMK ωWiadomo iż spełniają równanie oraz równanie gdy .
=)(
)(
1
)(
i
f
i
i
C
C
C
Związek z opisuje relacja
Relacja odwrotna ma postać
A zatem można przewidzieć iż macierz występująca także w relacji
gdzie
=
0
0)(''')(''' i
i
iCC
)('''1)('''1)( ˆˆˆˆ iTTii CZSRCWC −− ==
[ ]
=== −−
)()()1(
)(
2
)(
2
)1(
2
)(
1
)(
1
)1(
1
)()()1(11 ,..,,...,ˆˆˆˆ
f
f
i
ff
fi
fi
fiTTZSRW
χχχ
χχχ
χχχ
χχχ
)('''
)(
)(
i
i
i
i
C
C=χ
( )∑=
+=f
i
ii
itCq
1
)( cos ϕω
Rozwiązanie równań Lagrange’a II rodzaju w przybliżeniu małych drgań zapisano w
ogólnej postaci
)(iC
czyli może różnić się od tylko stałą)(iC)(iχ
0ˆ)()( =iTj CMC
Rozwiązanie równań Lagrange’a II rodzaju dla współrzędnych normalnych można zapisać
w postaci gdzie ( )∑=
+=f
i
ii
itCu
1
)(''' cos ϕω
)(''' iC )()()(''' ˆˆˆˆ iii CRSZCWC ==
uWq1ˆ −=1ˆ −W
ij ≠
Stałe niezbędne do ścisłego wyznaczenia macierzy można wyznaczyćzauważając iż
Z powyższej relacji wynika iż muszą spełniać relacje
co pozwala na określenie stałych brakujących do wyznaczenia i macierzyPonadto zachodzi relacja
)(iχ
( ) ( ) 1ˆ )()( =iTi M χχ)(iχ 1ˆ −W
Znając współrzędne normalne u współrzędne uogólnione q można określić z relacji
Znając współrzędne uogólnione q można znaleźć współrzędne normalne u ze wzoru
uWq1ˆ −=
( ) qMWqWu T
== − ˆˆˆ 1
( ) ( ) ( ) ( ) ( ) ( ) ( )IZZZSSSZZSMSZZSRMRSZ
ZSRMRSZZSRMZSRWMW
TTTTT
TTT
TTT
TTTT
TTT
ˆˆˆˆˆˆˆˆˆˆ'ˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
1211111
111111
=====
===
−−−−−−
−−−−−−
( ) ( ) ( ) WMWWIWWMWIWMW TTT ˆˆˆˆˆˆˆˆˆˆˆˆˆ 11111 =⇒=⇒= −−−−−
1ˆ −W)(''' iiC
( ) ( ) 0ˆ )()( =iTj M χχ gdy ij ≠
Na slajdach 26-32 pokazano iż do jednoczesnej diagonalizacji macierzy
oraz może służyć macierz
Ma ona postać gdzie - stała
(*) i=1,…..,f
(**)
Relacje (*) i (**) są spełnione też oczywiście przez macierze
Macierze zdiagonalizowane określamy ze wzorów oraz
Spełnienie relacji (**) zapewnia iż macierz jest diagonalna
Spełnienie dodatkowej relacji (***) wyznaczającej zapewnia dodatkowo iż
jest to macierz jednostkowa.
Z (*) wynika iż
a zatem uwzględniając (**) gdy
Spełnienie relacji zapewnia iż macierz
jest diagonalna, a relacji (***) ze jej elementy są równe (***)
Uwaga: Wcześniej pokazano iż relacja (**) przy spełnieniu relacji (*) zachodzi
zawsze gdy . W innym przypadku stanowi ona warunek dodatkowy.
1ˆ −W
[ ])()()1(1 ,..,,...,ˆ fiW χχχ=− )()(
)(
''' ii
i
i
C
C=χ
M̂K̂
( ) 0ˆˆ )(2 =− ii CMK ω
0ˆ )()( =iTj CMC
ij ωω ≠
)('''
i
iC
0)( ≠iC - macierz kolumnowa spełniająca warunki
( ) 11 ˆˆˆ −− WMW T
)()(2)()()(2)( ˆˆˆˆ iTji
iTji
i
iCMCCKCCMCK ωω =⇒=
ij ≠
0ˆˆ )()(2)()( == iTjiiTj CMCCKC ω
ij ≠0ˆ )()( =iTj CKC gdy
( ) 11 ˆˆˆ −− WKW T
ij ≠
1ˆ )()( =iTi Mχχ (***)
2
iω
)(''' iiC
)(iχ
( ) 11 ˆˆˆ −− WMW T ( ) 11 ˆˆˆ −− WKW T
Relacje wiążącą współrzędne uogólnione qi z normalnymi ui można zapisać w postaci
Po jej wstawieniu do równania ruchu
otrzymujemy
Uwzględniając to iż
mamy
Uwzględniając fakt iż gdy relacja ta może być spełniona
tylko wówczas gdy i=1,..........,f
Równania określające zależność współrzędnych uogólnionych od czasu są takie jak dla oscylatorów harmonicznych jednowymiarowych gdy
A ich rozwiązania maja postać ogólną
Gdy to
∑∑==
− ===f
i
i
i
i
i
f
i
i
iuC
CuuWq
1
)(
)(1
)(1
'''
1ˆ χ
qKqM ˆˆ −=&&
∑∑==
−=f
i
i
i
i
i
f
i
i
i
i
i
uCKC
uCMC 1
)(
)(1
)(
)(ˆ
'''
1ˆ'''
1&&
( ) )(2)()(2 ˆˆ0ˆˆ iiiii CMCKCMK ωω =⇒=−
∑∑==
−=f
i
i
i
ii
i
f
i
i
i
i
i
uCMC
uCMC 1
)(2
)(1
)(
)(ˆ
'''
1ˆ'''
1ω&&
02 =+ iii uu ω&&
0≠iω
0=iω ( )ii
i tAu γ+=)(
( )iii
i tAu ϕω += cos)(
ii γϕ , - stałe
0ˆ )()( =iTj CMC ij ≠
gdzie
=
fu
u
u
u2
1
Relacje odwrotną wiążącą współrzędne normalne z uogólnionymi można zapisać w postaci
qWu ˆ=
gdzie macierz
( ) ( ) ( ) WMWWIWWMWIWMW TTT ˆˆˆˆˆˆˆˆˆˆˆˆˆ 11111 =⇒=⇒= −−−−−( ) ( ) MWWW T ˆˆˆˆ 111 −−− ==
gdyż
Ponadto zachodzi
( ) ( )uKuuIuqKqqMqL TTTT ˆˆ2
1ˆˆ2
1′′′−=−= &&&&
=′′′
2
2
2
2
1
00
00
00
ˆ
f
K
ω
ω
ω
L
MOMM
L
L
gdzie
=
100
010
001
ˆ
L
MOMM
L
L
I
=
fu
u
u
u
&
&
&
&2
1
[ ]fT uuuu 21= [ ]fT uuuu &&&& 21=
uWq1ˆ −=
( )∑=
−=f
k
kkk uu1
222
2
1ω&
=
=
mgl
mgl
KK
KKK
0
02ˆ
2221
1211
=
=
22
22
2221
1211 2ˆmlml
mlml
MM
MMM
Współrzędne normalne u1 oraz u2 dla wahadła podwójnego o m1=m2=m i l1=l2=l
1α
2α
y
x
1m1
m2
2
1l
2l
( )12212112222221112
1αααααα &&&&&& MMMMT +++=
( ) constKKKKV ++++= 12212112222221112
1αααααα
2
2112 mlMM ==2
11 2mlM =2
22 mlM =
mglK 211 = 02112 == KKmglconst 3−=mglK =22
==
2
1
α
ααq
( ) 0ˆˆ )(2 =− ii CMK ω
Poprzednio znaleziono oraz spełniające równanie
dla oraz odpowiednio
Dodatkowo wiadomo iż współrzędne uogólnione q=α wiążą się ze
współrzędnymi normalnymi relacją
Macierz ma postać
przy czym macierze kolumnowe spełniają równania
Równania (1) mają identyczną postać jak równania wyznaczające
A zatem
1ˆ −W
( ) 0ˆˆ )(2 =− ii MK χω ( )
≠
===
jigdy
jigdyM ij
jTi
0
1ˆ )()( δχχ
=
)(
2
)(
1)(
i
i
i
χ
χχ
)(iC
−=
)1(
1
)1(
1)1(
2C
CC
=
)2(
1
)2(
1)2(
2C
CC
)2(
1
)2(
2
)1(
1
)1(
2 2;2 χχχχ =−=
( )221 +=l
gω ( )222 −=
l
gω
uWq1ˆ −=
(1)(2)
[ ]
==−
)2(
2
)1(
2
)2(
1
)1(
1)2()1(1ˆχχ
χχχχW
Równania (2) gdy są
spełnione automatycznie bo
ji ≠
ji ωω ≠
=
2
1
u
uu
( ) [ ]
[ ]
[ ] 12
111
12
12
1ˆ
)(
2
)(
1
)(
2
)(
1)(
2
)(
1
2
)(
2
)(
1)(
2
)(
1
2
)(
2
)(
1
22
22
)(
2
)(
1
)()(
=
+
+⋅⇔
⇔=
⋅
⋅⇔
⇔=
⋅
⋅⇔=
ii
ii
ii
i
i
ii
i
i
iiiTi
ml
ml
mlml
mlmlM
χχ
χχχχ
χ
χχχ
χ
χχχχχ
=
22
222ˆmlml
mlmlM
[ ] [ ]2
)(
2
)(
1
2)(
2
2)(
1
122
ml
iiii =++ χχχχ
)2(
1
)2(
2
)1(
1
)1(
2 2;2 χχχχ =−=
[ ] [ ] [ ]2
2)1(
1
2)1(
1
2)1(
1
12222
ml=−+ χχχ
[ ] [ ] [ ]2
2)2(
1
2)2(
1
2)2(
1
12222
ml=++ χχχ
i=1
i=2
równania (2) gdy j=i przyjmują postać (i=1,2)
Ponieważ to
)22(2
1
2
)1(
1
−=
mlχ
)22(2
22
2
)1(
1
)1(
2
−
−=−=
mlχχ
,
.
+−
−
+−=
=−
)22(2
2
)22(2
2
)22(2
1
)22(2
1
ˆ
22
22
)2(
2
)1(
2
)2(
1
)1(
11
mlml
mlmlW
χχ
χχ
++
−=
22222
1 212
1
uu
mlα
Równania określające związek współrzędnych uogólnionych ze współrzędnymi normalnymi przyjmują więc postać
[ ] [ ] [ ]2
2)1(
1
2)1(
1
2)1(
1
12222
ml=−+ χχχ
[ ] [ ] [ ]2
2)2(
1
2)2(
1
2)2(
1
12222
ml=++ χχχ
)22(2
1
2
)2(
1
+=
mlχ
)22(2
22
2
)2(
1
)2(
2
+==
mlχχ
⋅
+−
−
+−=
⇒== −
2
1
22
22
2
11
)22(2
2
)22(2
2
)22(2
1
)22(2
1
ˆu
u
mlml
mlmluWq
α
αα
++
−−=
22222
2 212
2
uu
mlα
( )
( ) ( )[ ]
( ) ( )[ ]
++++
−+−−
=
+
+⋅
++
−
−
−=
=
⋅
⋅
++
−
−
−=
⇒= −
21
212
21
212
2
1
22
22
22
22
2
11
212222
1
212222
1
2
2
22
2
22
1
22
2
22
1
2
2
)22(2
2
)22(2
1
)22(2
2
)22(2
1
ˆ
αα
αα
αα
αα
α
α
mlml
mlml
mlml
mlml
mlml
u
uqMWu
T
Związek odwrotny ma postać
( ) ( ) ( )[ ]212
1 2122222
αα −+−−
=ml
u
( ) ( ) ( )[ ]212
2 2122222
αα ++++
=ml
u
Funkcja Lagrange’a we współrzędnych normalnych
++
−=
22222
1 212
1
uu
mlα
++
−−=
22222
2 212
2
uu
mlα
( ) ( )=+−+++= 222121222212
22
132
2αααααα mglmglml
mlL &&&&
=
−
++
−++
++
−−
++
++
−−+
+
−
++
−++
++
−=
2
4
22
2
22
2
2
4
22
2
22
2
4
1
322222
2
2
4
22
2
22
2
2
4
22
2
22
2
4
1
21
2
2
2
121
2
2
2
1
2
2
2
1
21
2
2
2
121
2
2
2
1
uuuuuuuu
l
g
mgluu
uuuuuuuu
&&
&&&&&&&&
=
++
−−
++
++
−−+
++
−=
2222
322222
2
2222
2
2
2
1
2
2
2
1
2
2
2
1
uu
l
g
mgluuuu &&&&
=
++
−−+
++
−−+
++
−=
22223
22222
2
2222
2
2
2
1
2
2
2
1
2
2
2
1 uu
l
gmgl
uuuuL
&&&&
( ) ( ) ( )
( ) ( )222221212221
2
2
2
1
2
2
2
1
2
13
2
1
22222
13
2
1
uumgluuL
ul
gu
l
gmgluu
ωω +−++=
−++−++=
&&
&&
Równania Lagrange’a II rodzaju we współrzędnych normalnych
00 12
11
11
=+⇒=∂
∂−
∂
∂uu
u
L
u
L
dt
dω&&
&
00 22
22
22
=+⇒=∂
∂−
∂
∂uu
u
L
u
L
dt
dω&&
&
opisują dwa niesprzężone oscylatory o częstościach
kołowych oraz ( )221 +=l
gω ( )222 −=
l
gω