Drgania układu o jednym stopniu swobody
62
Rodzaje drgań na przykladzie ukladu o jednym stopniu swobody
Transcript of Drgania układu o jednym stopniu swobody

Rodzaje drgań na przykładzie układu o jednym stopniu swobody

Układ o jednym stopniu swobody
k C
m
S pt sino
m
k
S pt sin
C
o
Schemat układuo jednym stopniu swobody
Przykład układuo jednym stopniu swobody

Zestawienie sił w układzieo jednym stopniu swobody z harmoniczn ą sił ą wymuszaj ącą
m
S pt sinoS pt sin
B
y
o
K
C
Siły działające na układ:
harmoniczna siła wymuszająca -
siła sprężystości (sztywność belki przeciwstawiająca się ruchowi) -
siła tłumienia (tłumienie wiskotyczne materiałowo-konstrukcyjne) –
siła bezwładności -
ptSo sin
kyK =
dt
dycycC == &
2
2
)(dt
ydmymtB −=−= &&

Równanie ruchu układuo jednym stopniu swobody
S pt sin
y
o
ptSkyycym o sin=++ &&&
tłumienieSiła wymuszająca (zmienna w czasie)
B
K
C
o
siła bezwładności sztywność
Drgania sprężyny bez tłumienia”http://www.edukator.pl/Prawo-Hooke-a,7661.html
HookesLaw_pl.exe

Siła bezwładno ści
ptSkyycym o sin=++ &&&
Siła bezwładności jest to oddziaływanie na obiekt, który znajduje się w układzie (np. samochodzie) nieinercjalnym, inaczej mówiąc układzie, który porusza się ruchem niejednostajnym czyli nie ze stałą prędkością. Siła bezwładności jest równa iloczynowi masy i przyśpieszenia (druga pochodna przesunięcia po równa iloczynowi masy i przyśpieszenia (druga pochodna przesunięcia po czasie).
2
2
)(dt
ydmymtB −=−= &&

Siła bezwładno ści - przykład
Samochód jedzie ze stałą prędkością Vo=100km/h. Jakie siła bezwładności Zadziała na pasażera o masie m=100kg, jeżeli samochód miał dobre hamulce i od momentu rozpoczęcia hamowania do zatrzymania się przejechał yo=100m. Zakładamy, że podczas hamowania opóźnienie było cały czas stałe równe a.
∫∫ =oo tt
adtdV
2
2
dt
yd
dt
dVa ==
constmaymtB =−=−= &&)( ∫∫ = adtdV00
dt
dyV =
przyspieszenie
prędkość
oo ttatV
00=
00 atV =
( ) ( ) 00 00 ⋅−=− aatVtV
∫∫∫ ==ooo ttt
atdtVdtdy000
oott
tay0
2
05.0= 00
200
5.0
5.0
tV
aty
===
( ) ( ) 05.05.00 00 ⋅−=− aatyty

Siła bezwładno ści - przykład
Samochód jedzie ze stałą prędkością Vo=100km/h. Jakie siła bezwładności zadziała na pasażera o masie m=100kg, jeżeli samochód miał dobre hamulce i od momentu rozpoczęcia hamowania do zatrzymania się przejechał yo=100m. Zakładamy, że Podczas hamowania opóźnienie było cały czas stałe równe a.
atV = ⋅⋅=00 atV =
000 5.0 tVy =0/1005.0100 thkmm ⋅⋅=
0)3600/(10001005.0100 tsmm ⋅⋅⋅=st 2.70 =
00 atV = sahkm 6.3/100 ⋅= sasm 2.7)3600/(1000100 ⋅=⋅2/9.13 sma =
kNN
smkgmaB
39.11390
/9.13100 2
===⋅==
Siła bezwładności:

Tłumienie
ptSkyycym o sin=++ &&&
Siła tłumienia jest działaniem wewnątrz konstrukcji, które przeciwstawia się ruchowi. W konstrukcjach jest tłumienie materiałowe i konstrukcyjne
dycycC == &
dt
dycycC == &
Struktura materiału – tarcie wewnętrznych składników wywołuje tłumienie materiałowe
Współpraca poszczególnych elementów (połączenia) wywołuje tłumienie konstrukcyjne

Zestawienie rodzajów drga ń
0=+ kyym &&Drgania własne
Drgania swobodne (drgania tłumione)
0=++ kyycym &&&
ptSkyym o sin=+&&
ptSkyycym o sin=++ &&&
Drgania wymuszone nie tłumione
Drgania wymuszone tłumione

Rozwiązywanie równa ń różniczkowych liniowych drugiego rz ędu
ptSkyycym o sin=++ &&&
Równanie
( )tyy =gdzie:
Rozwiązanie jest sumą dwóch równań
po yyy +=gdzie: yο – całka ogólna, yp – całka szczególna
P.Wielgos, Ocena skuteczności działania wielokrotnych, strojonych tłumików masowych w konstrukcjach budowlanych, 2010

Wyznaczanie całki ogólnej
ptSkyycym o sin=++ &&&
Całka ogólna dla równania
to rozwiązanie równania
W celu rozwiązania tego równania wykonuje się podstawienie
dla którego
0=++ kyycym &&&
rtey =rtrey =& rtery 2=&&

Wyznaczanie całki ogólnej
Podstawienie
do równania 0=++ kyycym &&&
rtey = rtrey =& rtery 2=&&
daje nam zależność
0=++ kyycym &&&
02 =++ rtrtrt kecreemr
Po podzieleniu równania przez ert otrzymujemy równanie kwadratowe ze zmienną r
02 =++ kcrmr

Wyznaczanie całki ogólnej
Rozwiązanie zależy od parametru ∆, który jest równy
02 =++ kcrmrRozwiązywane równanie kwadratowe:
lub po podstawieniu
mkc 42 −=∆
m
k=2ω222 4 ωmc −=∆
Liczba rozwiązań zależy czy ∆ jest mniejsza, większa lub równa 0.

Wyznaczanie całki ogólnej
Przypadek 1dwa rzeczywiste rozwiązania r1 i r2 równania kwadratowego
02 =++ kcrmr
Rozwiązywane równanie kwadratowe i parametr ∆ :222 4 ωmc −=∆
0>∆dwa rzeczywiste rozwiązania r1 i r2 równania kwadratowego a całka ogólna jest zapisana wzorem
Przypadek 2pierwiastek podwójny r=r1=r2 a całka ogólna jest zapisana wzorem
Przypadek 3dwa zespolone rozwiązania ia całka ogólna jest zapisana wzorem
trtr eCeCy 2121 +=
0=∆
( ) rteCxCy 21 +=0<∆
ir βα +=1 ir βα −=2
( ) ( )( )tCtCey t ββα sincos 21 +=

Drgania własne
0=+ kyym &&
Rozwiązanie równania drgań własnych
jest całką ogólną równania, opisującego drgania wymuszonenie tłumione czyli
ptSkyym o sin=+&&nie tłumione czyli
Równanie drgań własnych po wykonaniu podstawienia y(t)=ert
ma formę
lub po podstawieniu
czyli
02 =+ kmr
022 =+ ωrm
k=2ω24ω−=∆

Drgania własne
0=+ kyym &&
Rozwiązanie równania drgań własnych
lub po podstawieniu
ma rozwiązanie zczyli z dwoma pierwiastkami zespolonymi
04 2 <−= ω∆
022 =+ ωr
czyli z dwoma pierwiastkami zespolonymi
a
br
21
∆+−= ωωωi
ir ==−=
2
4
2
4 222
1
a
br
22
∆−−= ωωωi
ir −=−=−−=
2
4
2
4 222
2
ir βα +=1
ir βα −=2
ωβα
== 0
( ) ( )( )tCtCey t ββα sincos 21 +=
( ) ( )tCtCy ωω sincos 21 +=
Rozwiązanie ma postać
a po podstawieniu α i β otrzymujemy

Drgania własne – wyznaczenie stałych
0=+ kyym &&
Rozwiązanie równania drgań własnych
( ) ( )tCtCy ωω sincos 21 +=ma formę
z niewiadomymi, które wyznaczamy na podstawie warunków początkowych czyli dla czasu t=0.
Zakładamy, że dla t=0 przesunięcie masy y=0, gdzie a prędkość masy (wymuszoną), gdzieVy =&
( ) ( )tCtCy ωω sincos 21 +=
( ) ( )tCtCy ωωωω cossin 21 +−=&

Drgania własne – wyznaczenie stałych
Zakładamy, że dla t=0 przesunięcie masy y=0, gdzieczyli
( ) ( )tCtCy ωω sincos 21 +=
( ) ( )0sin0cos0 21 ⋅+⋅= ωω CC
010 21 ⋅+⋅= CC0=C
a prędkość masy (wymuszoną), gdzie
Czyli
Rozwiązanie
Vy =&( ) ( )tCtCy ωωωω cossin 21 +−=&
01 =C
( ) ( )0cos0sin 21 ⋅+⋅−= ωωωω CCV
10 21 ⋅+⋅−= ωω CCV
ωV
C =2
( ) ( ) ( ) ( )tAtV
tV
ty o ωωω
ωω
ω sinsinsincos0 ==+=

Drgania własne
Rozwiązanie równania drgań własnych
( ) ( )tCtCy ωω sincos 21 +=
0=+ kyym &&
ma formę
( ) ( )tCtCy ωω sincos 21 +=
A po uwzględnieniu warunków początkowych:
( )tAy oo ωsin=gdzie:ω – częstość drgań własnych,Ao – amplituda drgań własnych zależna
od warunków początkowych
drgania1.exe
( )tAy oo ωsin=
( )tAdt
dyV o
o ωω cos==
( )tsAdt
dVa o
o ωω sin2−==

Drgania swobodne układu
Drgania swobodne są to drgania układu rzeczywistego z tłumieniem jakie można obserwować po wstępnym wymuszeniu ruchu, a następnie pozostawieniu konstrukcji bez dodatkowych obciążeń zmiennych.
0=++ kyycym &&&
ptSkyycym o sin=++ &&&
Rozwiązanie równaniadrgań swobodnych
jest całką ogólną równania,opisującego drganiawymuszonetłumione czyli
0.00 5.00 10.00 15.00 20.00 25.00 30.00
-20.00-15.00-10.00
-5.000.005.00
10.0015.0020.00
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00
-10.00
-5.00
0.00
5.00
10.00
15.00

Drgania swobodne układu
Rozwiązanie równania drgań swobodnych, otrzymujemy na podstawie równania
02 =++ kcrmrrtey =które uzyskujemy po podstawieniu wzoru:rtey =
Rozwiązanie równania zależy od parametru równania kwadratowego:
222 4 ωmc −=∆

Drgania swobodne układu
Analizę problemu wykonuje się dla równania w prostszejformie, którą uzyskuje się po podzieleniu obu stron równania przez m
mkcrmr /02 =++ cmkcrmr /02 =++czyli
Delta równania kwadratowego wynosi:
02 22 =++ ωγrr
22 44 ωγ −=∆i przybiera prostszą formę
gdzie:ω – częstość drgań własnych,γ – współczynnik tłumienia.
m
c=γ2 k=2ω

Drgania swobodne układu
Rozwiązanie równania drgań swobodnych zależy od wzajemnej relacji ω i γ czyli mamy trzy przypadki:
Przypadek 1 - Duże tłumienie γ>ω czyli 0>∆
Przypadek 2 -Tłumienie krytyczne czyli 0=∆ωγ =
Przypadek 3 - Małe tłumienie γ<ω czyli 0<∆
Sytuacja najczęściej spotykana w konstrukcjach

Drgania swobodne układuPrzypadek 1 - Duże tłumienie γ>ω
0>∆Pierwiastki równania kwadratowego
22 ωγγ −−−=r
02 22 =++ ωγrr
222 ωγ −=∆
221 ωγγ −−−=r
222 ωγγ −+−=r
Rozwiązanie równania różniczkowego: 02 2 =++ yyy ωγ&&&
trtr eCeCy 2121 +=

Drgania swobodne układuPrzypadek 1 - Wyznaczenie stałych
Warunki początkowe: t=0, y=yo ,
Równanie ruchu (rozwiązanie równania)
ovvy ==&
Równanie prędkości po zróżniczkowaniu równania ruchu względem czasu
trtr eCeCy 2121 +=
21 CCyo +=i po uwzględnieniu warunków początkowych
trtr erCerCy 212211 +=&
2211 rCrCvo +=i po uwzględnieniu warunków początkowych

Drgania swobodne układuPrzypadek 1 - Wyznaczenie stałych
21 CCyo +=
2211 rCrCvo +=
Stałe wyznaczamy z układu równań:22
1 ωγγ −−−=r22
2 ωγγ −+−=rgdzie:
2211 rCrCvo +=
22
220
12 ωγ
ωγγ−−
−−+= yyvC oo
22
22
22 ωγ
ωγγ−
−++= ooo yyvC
2 ωγγ −+−=r
i są one opisane wzorami:

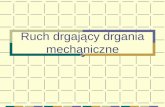
Drgania swobodne układuPrzypadek 1 - Przykład
m
S pt sino
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=2 rad/s,Częstość drgań własnych układu ω= 1 rad/s.

Drgania swobodne układuPrzypadek 1 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=2 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
Szukamy wielkości z równania:
[ ]rad/s73205.3321 −=−−=r
[ ]rad/s26795.0322 −=+−=r
trtr eCeCy 2121 +=
221 ωγγ −−−=r
222 ωγγ −+−=r

Drgania swobodne układuPrzypadek 1 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=2 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
Szukamy wielkości z równania:trtr eCeCy 21
21 +=22 ωγγ −−+ yyv
m264.0rad/s122
rad/s12m05.0rad/s2m05.0m/s1022
22
1 −=−−
−−⋅+=C
m941.2rad/s122
rad/s12m05.0rad/s2m05.0m/s1022
22
2 =−
−+⋅+=C
22
220
12 ωγ
ωγγ−−
−−+= yyvC oo
22
22
22 ωγ
ωγγ−
−++= ooo yyvC

Drgania swobodne układuPrzypadek 1 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=2 rad/s,Częstość drgań własnych układu ω= 1 rad/s. 1.8
2
2.2
2.4
2.6
2.8 Wykres zmian przemieszczeniaw czasie. Ruch jest nie drgający
i zanikający w czasie.
Rozwiązanie:
tt eey rad/s26795.0rad/s73205.3 2.941mm264.0 −− ⋅+⋅−=
0 1 2 3 4 5 6 7 8 9 10t [s]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6y
[m]

Drgania swobodne układuPrzypadek 2 - Tłumienie krytyczne γ=ω
0=∆Pierwiastki równania kwadratowego
γ−=== rrr
02 22 =++ ωγrr0=∆
γ−=== 21 rrr
Rozwiązanie równania różniczkowego:
02 2 =++ yyy ωγ&&&
( ) ( ) trt eCtCeCtCy γ2121 +=+=

Drgania swobodne układuPrzypadek 2 - Tłumienie krytyczne γ=ω
Warunki początkowe: t=0, y=yo ,
Równanie ruchu (rozwiązanie równania)
ovvy ==&
,
( ) teCtCy γ21 +=
Równanie prędkości po zróżniczkowaniu równania ruchu względem czasu
i po uwzględnieniu warunków początkowych
i po uwzględnieniu warunków początkowych
,
2Cyo =
γ21 CCvo +=
( ) tt reCetCy γγγ 21 1 ++=&

Drgania swobodne układuPrzypadek 2 - Wyznaczenie stałych
Stałe wyznaczamy z układu równań:
2Cyo =
γCCv +=
( ) teCtCy γ21 +=
gdzie:γ21 CCvo += γ−=r
oyC =2
γoo yvC −=1
i są one opisane wzorami:

Drgania swobodne układuPrzypadek 2 - Przykład
m
S pt sino
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=1 rad/s,Częstość drgań własnych układu ω= 1 rad/s.

Drgania swobodne układuPrzypadek 2 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=1 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
( ) rt+=Szukamy wielkości z równania: ( ) rteCtCy 21 +=
γ−=r
oyC =2
γoo yvC −=1
rad/s1−=r
C1=9.95m/s
C2=0.05m

Drgania swobodne układuPrzypadek 2 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=1 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
Wykres zmian przemieszczeniaw czasie. Ruch jest nie drgający
i zanikający w czasie.
3
3.5
4
Rozwiązanie:
( ) tety rad/s1m05.0m/s95.9 −+⋅=0 1 2 3 4 5 6 7 8 9 10
t [s]
0
0.5
1
1.5
2
2.5y
[m]

Drgania swobodne układuPrzypadek 3 - Małe tłumienie γ<ω
0<∆Urojone pierwiastki równania kwadratowego
22 ωγγ −−−= ir
02 22 =++ ωγrr
222 ωγ −=∆ i
ir βα −=, 221 ωγγ −−−= ir
222 ωγγ −+−= ir
Rozwiązanie równania różniczkowego: 02 2 =++ yyy ωγ&&&
( ) ( )( )tCtCey t ββα sincos 21 +=gdzie:
ir βα +=1
ir βα −=2,
γα −= 122 ωγωβ =−=
ω1 – częstość drgań swobodnych

Drgania swobodne układuPrzypadek 3 - Wyznaczenie stałych
Warunki początkowe: t=0, y=yo ,
Równanie ruchu (rozwiązanie równania)
ovvy ==&
i po uwzględnieniu warunków początkowych
( ) ( )( )tCtCey t ββα sincos 21 +=Cy =
Równanie prędkości po zróżniczkowaniu równania ruchu względem czasu
i po uwzględnieniu warunków początkowych
i po uwzględnieniu warunków początkowych
1Cyo =
( ) ( )( ) ( ) ( )( )tCtCetCtCey tt ββββββα αα cossinsincos 2121 +−++=&
2221 γωγ −+−= CCvo

Drgania swobodne układuPrzypadek 3 - Wyznaczenie stałych
Stałe wyznaczamy z układu równań:
1Cyo =22 γωγ −+−= CCv, ,
( ) ( )( )tCtCey t ββα sincos 21 +=
i są one opisane wzorami:
2221 γωγ −+−= CCvo
oyC =1
222γω
γ−
+= oo yv
C

Drgania swobodne układuPrzypadek 3 -Zmiana formy zapisu równania ruchu
Parametry drgań swobodnych z małym tłumieniem:
( )tCey tx βα cos11
=
( )tCey t βα sin=
Składowa rzeczywista:
( )tCey tx βα sin22
=Składowa urojona:
Początkowa amplituda drgań: 22
21 CCAo +=
Faza drgań:2
1arctanC
Co =ϕ
Równanie ruchu( )o
to teAy ϕωα += 1sin

Drgania swobodne układuPrzypadek 3 - Przykład
m
S pt sino
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=0.5 rad/s,Częstość drgań własnych układu ω= 1 rad/s.

Drgania swobodne układuPrzypadek 3 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=0.5 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
Szukamy wielkości z równania:( ) ( )( )tCtCey t ββα sincos += ( ) ( )( )tCtCey t ββα sincos 21 +=
γα −=
122 ωγωβ =−=
oyC =1
222γω
γ−
+= oo yv
C
rad/s5.0−=α[ ]rad/s866.05.02 1
22 ==−= ωβC1=0.05m
C2=11.5758 m

Drgania swobodne układuPrzypadek 3 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=0.5 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
22
21 CCAo +=
00432.0arctan2
1 ==C
Cϕ
Parametry drgań swobodnych z małym tłumieniem:
Ao=11.5759m

4
5
6
m]
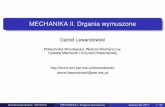
Drgania swobodne układuPrzypadek 3 - Przykład
Dane: Początkowe wychylenie yo=0.05m,Początkowa prędkość vo=10m/s,Tłumienie układu γ=0.5 rad/s,Częstość drgań własnych układu ω= 1 rad/s.
Wykres zmian przemieszczeniaw czasie. Ruch drgający
i zanikający w czasie.
0 1 2 3 4 5 6 7 8 9 10t [s]
0
1
2
3
y [m
Rozwiązanie:
( ) ( )( )ttey t rad/s866.0sinm5758.11rad/s866.0cosm05.0rad/s5.0 += −
( )00432.0rad/s866.0sinm5759.11 rad/s5.0 +⋅⋅= ⋅− tey t

10
11
12
13
14
15
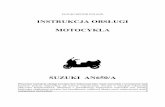
Drgania swobodne układuPrzypadek 3 - Parametry tłumienia
γ – współczynnik tłumienia
Na podstawie stosunku amplitud wyznacza się
0=++ kyycym &&&
c – współczynnik proporcjonalności tłumienia do prędkości02 =++ kyyym &&& γ
0 1 2 3 4 5 6 7 8 9 10t [s]
0
1
2
3
4
5
6
7
8
9
y [m
]
Ao
A1A2 Równanie krzywej przerywanej
toeAy γ−=
Na podstawie stosunku amplitud wyznacza sięlogarytmiczny dekrement tłumienia
( ) 11
)(ln T
Tty
ty γ=+
=∆11ln T
A
A
n
n γ==∆ −lub
T1 – okres swobodnych drgań tłumionych

3
4
5
6
y [m
]
Drgania swobodne układu -porównanie
Wykres zmian przemieszczenia w czasie dla:
2
2.5
3
3.5
4
y [m
]
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
y [m
]
0 1 2 3 4 5 6 7 8 9 10t [s]
0
1
2
drgania2.exe
Drgania wahadła tłumione
0 1 2 3 4 5 6 7 8 9 10t [s]
0
0.5
1
1.5
0 1 2 3 4 5 6 7 8 9 10t [s]
0
0.2
0.4
0.6
0.8
1
1.2
Przypadek 1Duże tłumienie γ>ωczyli
Przypadek 3Małe tłumienie γ<ωczyli 0>∆ 0=∆ 0<∆
Przypadek 2Tłumienie krytyczne γ>ω czyli

Drgania wymuszone
ptSkyym o sin=+&&
ptSkyycym o sin=++ &&&
Drgania wymuszone nie tłumione
Drgania wymuszone tłumione
Rozwiązanie (suma całki ogólnej i szczególnej)
po yyy +=
P.Wielgos, Ocena skuteczności działania wielokrotnych, strojonych tłumików masowych w konstrukcjach budowlanych, 2010

Wyznaczenie całki szczególnej
Rozwiązanie równania różniczkowego
Całka szczególna, przyjęta jest na podstawie założenia, że
ptSkyym o sin=+&&
Całka szczególna, przyjęta jest na podstawie założenia, że zmiana przesunięcia w czasie musi mieć podobną formę dozmian w czasie funkcji wymuszającej czyli prognozowane rozwiązanie ma formę
a jej pochodne( ) ( )ptAptAy p cossin 21 +=
( ) ( )ptpAptpAy p sincos 21 −=&
( ) ( )ptpAptpAy p cossin 22
21 −−=&&

Wyznaczenie całki szczególnej
Rozwiązanie równania różniczkowego
Po podstawieniu równań z prognozowanym rozwiązaniem mamy
ptSkyym o sin=+&&
mamy( ) ( ) ( ) ( )
ptSptkAptkAptpmAptpmA
o sincossincossin 21
22
21
==++−−
Wyrazy po lewej i prawej stronie równania muszą mieć te same współczynniki czyli
a po podstawieniuoSkApmA =+− 1
21 02
22 =+− kApmA
m
k=2ω( )
m
SpA o=− 22
1 ω ( ) 0222 =− pA ω

Drgania wymuszone nie tłumione
Rozwiązanie równania różniczkowegojest równanie
gdzie
ptSkyym o sin=+&&( ) ( )ptAptAy p cossin 21 +=
( )m
SpA o=− 22
1 ω ( ) 0222 =− pA ω
1SA o=
Całka szczególna, przyjęta na podstawie założenia, że zmiana przesunięcia w czasie musi mieć podobną formę dozmian w czasie funkcji wymuszającej i ostatecznie ma formę
gdzie:
( )22
1
pm
SA o
p −=
ω
( )ptAy pp sin=
02 =A( )221
1
pm
SA o
−=
ω

Drgania wymuszone nie tłumione
Równanie różniczkowe
ptSkyym o sin=+&&Całka ogólna, która jest rozwiązaniem równania
0=+ kyym &&
Rozwiązanie, które jest sumą całki ogólnej i szczególnej
( ) ( )tAptAy op ωsinsin +=
( )tAy oo ωsin=ma formę
Całka szczególna
0=+ kyym &&
( )ptAy pp sin=

Drgania wymuszone tłumione
Rozwiązanie równania różniczkowego
Całka szczególna
ptSkyycym o sin=++ &&&
Całka szczególna
gdzie:
( ) 22222 4
1
ppm
SA o
p
γω +−=
( )ϕ−= ptAy pp sin
22
2arctan
p
p
−=
ωγϕ
DrivenSHM_pl.exe
m
k=2ωm
c=γ2

Drgania wymuszone tłumione
Równanie różniczkoweptSkyycym o sin=++ &&&
( ) ( )ϕϕωγ −++= − ptAteAy pot
o sinsin 1
Rozwiązanie, które jest sumą całek ogólnej i szczególnej

Współczynnik dynamiczny
Współczynnik dynamiczny jest to stosunek:
amplitudy drgań wywołanychsiłą zmienną w czasie
S=Sosin(pt)
A(t)siłą zmienną w czasie z amplitudą siły So
do
przemieszczenia statycznego wywołanego siłą So - yst
A(t)
S=Sosin(pt)
Ap=A(t)
So
yst

Współczynnik dynamiczny drga ń wymuszonych nie tłumionych
( )1S
A o=
Maksymalna amplituda drgań wymuszonych nie tłumionych – układ drgający S=Sosin(pt)
A(t)
( )22
1
pm
SA o
p −=
ω
k
Sy o
st =
Przemieszczenie punktu konstrukcji o sztywności k- Brak drgań
A(t)
S=Sosin(pt)
Ap=A(t)
So
yst

Współczynnik dynamiczny drga ń wymuszonych nie tłumionych
1S2ωm
Sy o
st =
Z definicji częstości drgań własnych wynika:
2ωmk = czyli
( )22
1
pm
SA o
p −=
ω
ωm
( )222
2
2
22
1
11
1
−=
−=−=
ωω
ω
ω
ωβpp
m
Spm
S
o
o
st
p
y
A=β

Współczynnik dynamiczny drga ń wymuszonych tłumionych
Amplituda drgań wymuszonych tłumionych
( )1S
A op =
k
Sy o
st =
Przemieszczenie punktu konstrukcji o sztywności k
( ) 22222 4 ppmAp
γω +−=
2ωm
Sy o
st =

Współczynnik dynamiczny drga ń wymuszonych tłumionych
st
p
y
A=β ( )
2
22222
14
1
ω
γωβ
m
Sppm
S
o
o
+−=
2ωm
22
22
41
1
+
−
=
ωγ
ω
βpp

Rezonans drga ń
Współczynnik dynamiczny dla drgań wymuszonych tłumionych
2
1=β
Jeżeli , to p→ω
22
22
41
+
−
=
ωγ
ω
βpp
γβ
2
1=

Rezonans drga ń
2
1
1
−=
ω
βp
Współczynnik dynamiczny dla drgań wymuszonych nie tłumionych
Jeżeli , to p→ω ∞→β ωJeżeli , to ∞→β
W przypadku wymuszania drgań z częstością zbliżoną do częstości drgań własnych następuje znaczący wzrost amplitudy drgań. W przypadku braku tłumienia amplituda dąży do nieskończoności.

Rezonans drga ń
µ - amplituda
ωγ=b
Z. Dyląg i in., Mechanika budowli.
ω
Link do rezonansu:http://www.edukator.pl/Drgania-wymuszone,8067.html

Koniec
http://www.edukator.pl/
drgania1.exe
Drgania własneKoniec
drgania2.exe
Drgania wahadła tłumione