[IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012...
4
Sidelobe level reduction for complex radar signals with small base Mariusz Łuszczyk Przemysłowy Instytut Telekomunikacji S.A. 30, Poligonowa St., 04-051,Warsaw, Poland tel.+48 22 486 52 08 , fax: +48 22 4865 263, email:[email protected] Aleksander Łabudziński Przemysłowy Instytut Telekomunikacji S.A. 30, Poligonowa St., 04-051,Warsaw, Poland tel.+48 22 486 55 43 , fax: +48 22 4865 263, email:[email protected] Abstract The mostly applicable radar signal is pulse signal with linear frequency modulation (LFM). The main feature such signal is time-bandwidth product (so called base) which is calculated as product of pulse duration and signal bandwidth. Theoretical peak to sidelobe level is achievable with time- bandwidth product value grater than 100. For time-bandwidth product smaller then 100 (i.e. short pulse duration or narrow deviation of FM modulation) peak-to-sidelobe level (PSL) and pulse compression coefficient are significantly reduced. Non-linear frequency modulated (NLFM) radar signal for small time-bandwidth product features better PSL and pulse compression coefficient. The NLFM signal synthesis algorithm and simulation results are presented in the paper. LFM and NLFM signals with small time-bandwidth product are compared and results are discussed in aspect of radar resolution improvement. Keywords: radar signal; pulse compression; waveform design; NLFM; peak-to-sidelobe level 1. Introduction Radar waveform design based on complex signals and their pulse compression are important issue in modern radar signal processing [1]. The matched filter is a filter whose impulse response, or transfer function are determined by a certain signal, in a way that it results in the maximum attainable signal to noise ratio (SNR) [3], [6]. Pulse compression involves using a matched filter to compress the energy in a signal into a relative narrow pulse. Moreover the pulse compression technique increases the range resolution of transmitted pulse without having to increase the peak transmit power [1]. Pulse compression ratio s K is defined as a relation maximum SNR at the matched filter output to the SNR at the matched filter input at the time 0 t , when the output signal amplitude is maximum ( )( ) ( ) i o s SNR t SNR K 0 max = (1) In practise pulse compression ratio is defined as relation width of main lobe of compressed signal measured at level of -4dB to the pulse duration (signal before compression). The LFM, or chirp waveform, has superior performance in pulse compression radar since they can be easily generated and processed. Many diverse techniques and devices have been developed to provide the required pulse compression processing for these signals [2]. However, the LFM has large sidelobes with respect to the mainlobe. Reducing the sidelobes can be accomplished by linear filtering the output, i.e., applying window functions. However, since the cumulative filtering is no longer precisely matched to the signal, it necessarily reduces output SNR as well, typically by 1-2 dB. A single decibel of SNR is equivalent to a 25% transmitted power. It has a great influence on power budget in modern power transmitters based on semiconductors power modules. The non-linear frequency modulation (NLFM) signal is another continuous phase modulation waveform applicable to pulse compression radar. The NLFM requires no time weighting for range sidelobe suppression and that can avoid SNR degradation associated with sidelobe filtering required with LFM radar signals. 2. Designing non-linear frequency modulated signal It is well-known that NLFM chirp modulation can advantageously shape the power spectral density such that the autocorrelation function exhibits substantially reduced sidelobes in comparison with LFM signal [2], [3]. An alternative method for modifying the shape of the spectrum which avoids energy loss is to distort the frequency modulation function rather than the amplitude window. However precision NLFM chirps are more difficult to design, produce, and process. In this section the design method is explained. An arbitrary frequency modulated signal (chirp) can be written () () () [ ] t j exp t a t s ϕ = (2) where: () t a - amplitude modulation function, () t ϕ - phase modulation function. The signal is limited to finite rectangular pulse with shape ⎪ ⎩ ⎪ ⎨ ⎧ ≤ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ else T t T t rect 0 2 1 1 (3) where T - is pulse time duration. The Fourier transform of the chirp can be expressed as () () () [ ] () () { } [ ] ∫ ϕ + ω - π = Φ = ∞ ∞ - dt t t j exp t a 2 1 f j exp f S f S (4) where: () f S - spectrum of , () f S - amplitude spectrum and () f Φ - spectrum phase function. A time the instaneous frequency is determined by the time derivative of phase at ( ) k k t f ϕ π ′ = 2 1 (5) IRS 2012, 19th International Radar Symposium, May 23-25, Warsaw, Poland 146 978-1-4577-1837-3/12/$26.00 ©2012 IEEE
-
Upload
aleksander -
Category
Documents
-
view
219 -
download
7
Transcript of [IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012...
![Page 1: [IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012 13th International Radar Symposium - Sidelobe level reduction for complex radar signals](https://reader040.fdocuments.pl/reader040/viewer/2022030105/57509f841a28abbf6b1a6361/html5/page/1.jpg)
Sidelobe level reduction for complex radar signals with small base
Mariusz Łuszczyk
Przemysłowy Instytut Telekomunikacji S.A.
30, Poligonowa St., 04-051,Warsaw, Poland
tel.+48 22 486 52 08 , fax: +48 22 4865 263,
email:[email protected]
Aleksander Łabudziński
Przemysłowy Instytut Telekomunikacji S.A.
30, Poligonowa St., 04-051,Warsaw, Poland
tel.+48 22 486 55 43 , fax: +48 22 4865 263,
email:[email protected]
Abstract
The mostly applicable radar signal is pulse signal with
linear frequency modulation (LFM). The main feature such
signal is time-bandwidth product (so called base) which is
calculated as product of pulse duration and signal bandwidth.
Theoretical peak to sidelobe level is achievable with time-
bandwidth product value grater than 100. For time-bandwidth
product smaller then 100 (i.e. short pulse duration or narrow
deviation of FM modulation) peak-to-sidelobe level (PSL)
and pulse compression coefficient are significantly reduced.
Non-linear frequency modulated (NLFM) radar signal for
small time-bandwidth product features better PSL and pulse
compression coefficient. The NLFM signal synthesis
algorithm and simulation results are presented in the paper.
LFM and NLFM signals with small time-bandwidth product
are compared and results are discussed in aspect of radar
resolution improvement.
Keywords: radar signal; pulse compression; waveform
design; NLFM; peak-to-sidelobe level
1. Introduction
Radar waveform design based on complex signals and
their pulse compression are important issue in modern radar
signal processing [1]. The matched filter is a filter whose
impulse response, or transfer function are determined by a
certain signal, in a way that it results in the maximum
attainable signal to noise ratio (SNR) [3], [6]. Pulse
compression involves using a matched filter to compress the
energy in a signal into a relative narrow pulse. Moreover the
pulse compression technique increases the range resolution of
transmitted pulse without having to increase the peak transmit
power [1].
Pulse compression ratio sK is defined as a relation
maximum SNR at the matched filter output to the SNR at the
matched filter input at the time 0t , when the output signal
amplitude is maximum
( ) ( )( )i
os
SNR
tSNRK 0max
= (1)
In practise pulse compression ratio is defined as relation
width of main lobe of compressed signal measured at level of
-4dB to the pulse duration (signal before compression).
The LFM, or chirp waveform, has superior performance
in pulse compression radar since they can be easily generated
and processed. Many diverse techniques and devices have
been developed to provide the required pulse compression
processing for these signals [2]. However, the LFM has large
sidelobes with respect to the mainlobe. Reducing the
sidelobes can be accomplished by linear filtering the output,
i.e., applying window functions. However, since the
cumulative filtering is no longer precisely matched to the
signal, it necessarily reduces output SNR as well, typically by
1-2 dB. A single decibel of SNR is equivalent to a 25%
transmitted power. It has a great influence on power budget in
modern power transmitters based on semiconductors power
modules.
The non-linear frequency modulation (NLFM) signal is
another continuous phase modulation waveform applicable to
pulse compression radar. The NLFM requires no time
weighting for range sidelobe suppression and that can avoid
SNR degradation associated with sidelobe filtering required
with LFM radar signals.
2. Designing non-linear frequency modulated signal
It is well-known that NLFM chirp modulation can
advantageously shape the power spectral density such that the
autocorrelation function exhibits substantially reduced
sidelobes in comparison with LFM signal [2], [3]. An
alternative method for modifying the shape of the spectrum
which avoids energy loss is to distort the frequency
modulation function rather than the amplitude window.
However precision NLFM chirps are more difficult to design,
produce, and process.
In this section the design method is explained. An
arbitrary frequency modulated signal (chirp) can be written
( ) ( ) ( )[ ]tjexptats ϕ= (2)
where: ( )ta - amplitude modulation function, ( )tϕ - phase
modulation function.
The signal is limited to finite rectangular pulse with
shape
⎪⎩⎪⎨⎧
≤=⎟⎠
⎞⎜⎝⎛
elseT
t
T
trect
02
11
(3)
where T - is pulse time duration.
The Fourier transform of the chirp can be expressed as
( ) ( ) ( )[ ] ( ) ( ){ }[ ]∫ ϕ+ω−π
=Φ=∞
∞−
dtttjexpta2
1fjexpfSfS (4)
where: ( )fS - spectrum of , ( )fS - amplitude spectrum and
( )fΦ - spectrum phase function.
A time the instaneous frequency is determined by the
time derivative of phase at
( )kk tf ϕπ
′=2
1 (5)
IRS 2012, 19th International Radar Symposium, May 23-25, Warsaw, Poland
146 978-1-4577-1837-3/12/$26.00 ©2012 IEEE
![Page 2: [IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012 13th International Radar Symposium - Sidelobe level reduction for complex radar signals](https://reader040.fdocuments.pl/reader040/viewer/2022030105/57509f841a28abbf6b1a6361/html5/page/2.jpg)
The stationary-phase concept says that the energy
spectral density at the frequency is relatively large if the rate
of change of the frequency at this time is relatively small. The
inverse relationship between spectral density and frequency
rate of changes is approximated by the expression [3].
( ) ( )( )k
k2
2
kt
ta2fU
ϕ′′π≈ (6)
In NLFM ( )kta is constant and shape the spectrum is
dependent of ( )ktϕ ′′ . ( )fU is approximate by a function
( )fV , which is independent of the amplitude function ( )tg .
According to the stationary-phase principle the second
derivative of phase spectrum is expressed [3]
( ) ( )( )ta
fVf
2
2
2π=Φ ′′ (7)
where: ( )fV is a window function which approximates
amplitude spectrum of designed NLFM signal. ( )fV is
defined over the frequency interval 22 BfB ≤≤− , the first
derivative ( )fΦ′ is obtained by integrating the second
derivative
( ) ( ) ζζ df
f
B
∫−
Φ ′′=Φ′
2
(8)
The group delay function ( )fT is given by the expression
( ) ( )ffT Φ′−=π2
1 (9)
The instantaneous frequency as a function of time is the
inverse of ( )fT
( ) ( )fTtf 1−= (10)
The phase function of the designed signal is obtained from the
frequency function
( ) ( ) ζζπϕ dft
t∫=
0
2 (11)
Phase function and amplitude function are required to
generate the complex envelope of NLFM signal.
The design method, step by step can be summarized as:
− choose pulse time duration T and signal bandwidth B ,
− choose the desired amplitude spectrum (Kaiser window
function in this case),
− choose the parameter value for window function,
− integrate a square root of window function in range over
designed signal bandwidth according to (8),
− calculate of the inverted function according to (9) and
(10),
− calculate ( )tϕ according (11),
− calculate the radar signal ( )ts according to (2).
3. Kaiser window function
To generate NLFM signal with uniform amplitude and a spectrum following a square root of one-parameter Kaiser window function the algorithm expressed in second section this paper is used. The Kaiser window function is defined by the formula
( )⎪⎪⎩
⎪⎪⎨⎧
≤≤⎟⎟⎟⎠⎞
⎜⎜⎜⎝⎛ ⎟⎠
⎞⎜⎝⎛
−−
=
otherwise
MnI
M
nI
wn
0
0
12
1
0
2
0
πα
πα (11)
where:
− 0I is the zeroth order modified Bessel function of the first
kind,
− α is an arbitrary real number that determines the shape of
the window in the frequency domain and
parameter πα=K ,
− M is an integer and the length of the sequence is N=M+1.
Obviously, it is difficult to get the explicit expressions of
( )tf , ( )tϕ to synthesize NLFM complex signal. So the
numerical method is employed to solve nonlinear equations
and perform integration in order to get their discrete values at sampling points. Kaiser window formula in Matlab
programming environment is expressed:
)(K 0))/bessel_ 1.^2-) Mn/ *(2 -(1sqrt *(K bessel_0=w (12)
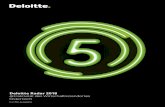
Kaiser window function with arbitrary parameter value 1K =
is depicted on the Fig 1. The shape of the function is the
spectrum of designed NLFM signal. Choosing Kaiser window
parameter value ( )K , the spectrum of the designed signal can
be changed.
Fig.1. Designed spectrum of NLFM signal based on Kaiser window
with parameter K=1.
4. Simulation results for signal with small time-
bandwidth product
According to the NLFM signal synthesis algorithm
presented in the second part of this paper some simulation
results are presented. For the experiment part of this paper intrapulse modulation parameter are arbitrary chosen:
− bandwidth modulation - MHzB 75.0= ,
− pulse time duration - sT µ20= .
Time-bandwidth product is 15=BT . Kaiser window
function with arbitrary chosen parameter 1K = is used to
approximate designed NLFM spectral shape (Fig.1).
Transformation of desired spectrum to a NLFM signal is
147
![Page 3: [IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012 13th International Radar Symposium - Sidelobe level reduction for complex radar signals](https://reader040.fdocuments.pl/reader040/viewer/2022030105/57509f841a28abbf6b1a6361/html5/page/3.jpg)
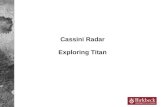
depicted on group delay function (Fig.2), instantaneous
frequency modulation frequency (Fig.3).
Fig.2 The group delay function of the designed NLFM signal.
The frequency characteristic of the NLFM signal vs. pulse
time duration time is presented in Fig. 3. The frequency
modulation characteristic is obtained on numerical method
way in Matlab environment.
Fig. 3 Modulation function of NLFM signal
(pulse duration T=20µs; bandwidth B=0,75MHz)
The resulting autocorrelation function is shown in Fig.6.
Designed NLFM signal has an almost flat pedestal of less then -40dB, excluding first time sidelobe at -37dB. The time
side lobes for designed NLFM signal are much better then for
LFM signal with the same time-bandwidth product [3,5].
The effective compression ratio is higher then the one time-bandwidth product. Main lobe width at -4dB level is
about 60ns. The pulse compression ratio is about -26dB.
The ambiguity function ( )Df,τχ (AF) is the essential tool
for assessment of complex radar signal. The function is
regarded as two-dimensional autocorrelation function with
two parameters: τ - time delay and Df - doppler shift. The
autocorrelation function is particular case of AF for Doppler
shift 0=Df . Autocorrelation function of LFM signal and
NLFM signal are depicted at Fig. 4 and Fig. 5 respectively.
The main feature both signals is small time-bandwidth
product, equals 15.
Fig. 4 Autocorrelation functions of LFM complex radar signals with pulse
duration T=20µs and bandwidth B=0,75MHz.
Fig. 5 Autocorrelation functions of NLFM complex radar signals with pulse
duration T=20µs and bandwidth B=0,75MHz:
Computer simulations were taken for LFM and NLFM
signals, where pulse compression ratio sK and PSL ratio
were considered (table 1). NLFM signal improves essential characteristics of complex signal with small time-bandwidth
product in comparison with LFM signals (i.e. PSL and pulse
compression ratio). PSL ratio for LFM signals with base less
than 100 have quite different characteristics than signals with base more than 100 [4]. PSL ratio significant deterioration
can not be accepted id radar application. NLFM signals (with
the base like LFM) can significantly improve discussed
characteristics. Moreover NLFM signal features SNR improvements referring to lack of weighting processing in
matched filtering [5].
Table 1 Main characteristics of compressed signal (LFM
and NLFM)
signal parameters
LFM NLFM
Ks PSL
[dB] Ks
PSL
[dB]
B=0,75MHz
T=5µs 2,5 -13 13 -29
T=10µs 5 -20 20 -28
T=20µs 10 -26 26 -37
B=6MHz
T=1µs 4 -18 10 -41
T=5µs 20 -32 100 -56
T=10µs 40 -38 110 -61
T=20µs 87 -43 200 -63
148
![Page 4: [IEEE 2012 13th International Radar Symposium (IRS) - Warsaw, Poland (2012.05.23-2012.05.25)] 2012 13th International Radar Symposium - Sidelobe level reduction for complex radar signals](https://reader040.fdocuments.pl/reader040/viewer/2022030105/57509f841a28abbf6b1a6361/html5/page/4.jpg)
4. Conclusion
In this paper the design of NLFM signal is based on the
Kaiser window function in terms of practical radar parameters. Parameter window offers possibility to control
the designed signal spectrum and the signal autocorrelation
function. Presented algorithm NLFM signal synthesis is
illustrated with essential signal characteristics in time and frequency domain. Nonlinear FM waveforms offer a radar
matched filter output with inherently low range sidelobes
(about -80dB) for signals with time-bandwidth product more
than 100. For signals with less base parameter the PSL rate and pulse compression rate are better in comparison with
LFM signal with the same base parameters.
References
[1] Liu, J., „Spectrum characteristic analysis of DDS-based
RF digital modulation“ Electrical and Electronic
Technology, 2001. TENCON. Proceedings of IEEE
Region 10 International Conference, vol. 2, 588-591, August 19-22, 2001.
[2] Kroszczyński J., „Kompresja impulsu w radiolokacji“
Prace PIT nr 58, 1967 (in Polish).
[3] Levanon N., Mozeson E., „Radar Signals“. John Wiley&Sons, Inc., Hoboken, New Jersey, 2004.
[4] Cook Ch.E., Bernfeld M., „Radar Signals. An
Introduction to Theory and Application“, Artech House
Inc., Boston 1993. [5] Leśnik C., „Nonlinear Frequency Modulated Signal
Design“. Acta Physica Polonica A, vol. 116, 2009.
[6] Endres, T. J., R. B. Hall, A. M. Lopez, „Design and
analysis methods of a DDS-based synthesizer for military spaceborne applications" Frequency Control
Symposium, 1994. 48th. Proceedings of the 1994 IEEE
International, 624-632, June 1-3, 1994.
149