2015 Signal Processing Symposium (SPSympo) 2015 Signal...
11
2015 Signal Processing Symposium (SPSympo) Debe Village June 10-12, 2015 Poland
Transcript of 2015 Signal Processing Symposium (SPSympo) 2015 Signal...

2015 Signal Processing Symposium(SPSympo)
Debe VillageJune 10-12, 2015
Poland
2015 Signal Processing Symposium(SPSympo)
Debe VillageJune 10-12, 2015
Poland
1

Editors
Anna Kurowska
Jacek MisiurewiczKrzysztof Różanowski
Olaf TruszczyńskiWarsaw University of TechnologyNowowiejska 15 / 19 00-665 Warsaw, Poland
Military Institute of Aviation MedicineKrasińskiego 54 / 5601-755 Warsaw, Poland
Phone:+48 22 234 74 78Fax: +48 22 825 23 00Email: [email protected]: [email protected]
Phone:+48 26 185 26 01Fax: +48 22 633 41 54Email: [email protected]: [email protected]
Web: http://www.spsympo2015.ise.pw.edu.pl
Copyright ©2015 by The Warsaw University of Technology (WUT). All rights reserved.
No part of the 2015 Signal Processing Symposium (SPSympo) proceedings (text passages, figures, data
or other material) may be reproduced, stored in a retrieval system, or transmitted in any form or by any
means, electronic, photocopying, recording, scanning, or otherwise, without either prior written
permission of the authors of an article or written permission of the WUT.
ISBN 978-83-7798-159-1
Printed in BEL Studio, ul. Powstańców Śl. 67B, 01-355 Warszawa, Poland
Editors
Anna Kurowska
Jacek MisiurewiczKrzysztof Różanowski
Olaf TruszczyńskiWarsaw University of TechnologyNowowiejska 15 / 19 00-665 Warsaw, Poland
Military Institute of Aviation MedicineKrasińskiego 54 / 5601-755 Warsaw, Poland
Phone: +48 22 234 74 78Fax: +48 22 825 23 00Email: [email protected]: [email protected]
Phone: +48 26 185 26 01Fax: +48 22 633 41 54Email: [email protected]: [email protected]
Web: http://www.spsympo2015.ise.pw.edu.pl
Copyright ©2015 by The Warsaw University of Technology (WUT). All rights reserved.
No part of the 2015 Signal Processing Symposium (SPSympo) proceedings (text passages, figures, data
or other material) may be reproduced, stored in a retrieval system, or transmitted in any form or by any
means, electronic, photocopying, recording, scanning, or otherwise, without either prior written
permission of the authors of an article or written permission of the WUT.
ISBN 978-83-7798-160-3
2

Table of Contents
SESSION A0Requirements of RADAR Techniques for Defence Activities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Carole E. Nahum (Office for Advanced Research and Innovation, DGA, French MoD, France)
SESSION A1 Passive Radar Algorithms / ProcessingDirect Signal Suppression Schemes for Passive Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
J.L. Garry, G.E. Smith, C.J. Baker (Electrical and Computer Engineering, The Ohio State University, USA)
Effective implementation of passive radar algorithms using General-Purpose computing on Graphics Processing Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Karolina Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Po-land), Mateusz Malanowski (Institute of Electronic Systems Warsaw University of Technology, Po-land), Michał Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Poland)
First results on ground targets tracking using UHF passive radars under non line-of-sight conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Pedro Gomez-del-Hoyo, Nerea del-Rey-Maestre, David Mata-Moya, María-Pilar Jarabo-Amores, Jaime Martin-de-Nicolas (Signal Theory and Communications Department Polytechnic School, University of Alcalá, Spain)
Range Only Target Localization in Multi-Static Passive Radar System: A Gradient Descent Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Salaheddin Alakkari, Khalid Jamil and Sami Alhumaidi (Prince Sultan Advanced Technologies Re-search Institute King Saud University, Saudi Arabia)
Tracking algorithm analysis for the PCL-PET fusion system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Leszek Lamentowski, Roman Mularzuk, Tadeusz Brenner (PIT-RADWAR S.A., Poland), Maciej Nieszporski (PIT-RADWAR S.A. and Wydział Fizyki Uniwersytet Warszawski, Poland)
SESSION B1 Biomedical Signals IPatient-specific epileptic seizure prediction using correlation features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Oleg Panichev, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Volodymyr Kharytonov (Kyiv Munici-pal Clinical Psychoneurological Hospital №1, Ukraine)
Robust Estimation of Respiratory Rate Based on Linear Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
5
Table of Contents
SESSION A0Requirements of RADAR Techniques for Defence Activities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Carole E. Nahum (Office for Advanced Research and Innovation, DGA, French MoD, France)
SESSION A1 Passive Radar Algorithms / ProcessingDirect Signal Suppression Schemes for Passive Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
J.L. Garry, G.E. Smith, C.J. Baker (Electrical and Computer Engineering, The Ohio State University, USA)
Effective implementation of passive radar algorithms using General-Purpose computing on Graphics Processing Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Karolina Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Po-land), Mateusz Malanowski (Institute of Electronic Systems Warsaw University of Technology, Po-land), Michał Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Poland)
First results on ground targets tracking using UHF passive radars under non line-of-sight conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Pedro Gomez-del-Hoyo, Nerea del-Rey-Maestre, David Mata-Moya, María-Pilar Jarabo-Amores, Jaime Martin-de-Nicolas (Signal Theory and Communications Department Polytechnic School, University of Alcalá, Spain)
Range Only Target Localization in Multi-Static Passive Radar System: A Gradient Descent Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Salaheddin Alakkari, Khalid Jamil and Sami Alhumaidi (Prince Sultan Advanced Technologies Re-search Institute King Saud University, Saudi Arabia)
Tracking algorithm analysis for the PCL-PET fusion system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Leszek Lamentowski, Roman Mularzuk, Tadeusz Brenner (PIT-RADWAR S.A., Poland), Maciej Nieszporski (PIT-RADWAR S.A. and Wydział Fizyki Uniwersytet Warszawski, Poland)
SESSION B1 Biomedical Signals IPatient-specific epileptic seizure prediction using correlation features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Oleg Panichev, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Volodymyr Kharytonov (Kyiv Munici-pal Clinical Psychoneurological Hospital №1, Ukraine)
Robust Estimation of Respiratory Rate Based on Linear Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
5
5

Comparison of First Order Statistical and Autoregressive Model Features for Activity Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Ömer Kayaaltı (Erciyes University Dept. of Computer Technologies Develi Hüseyin Şahin Vocatio-nal College, Turkey), Musa Hakan Asyalı (Yıldız Technical University Dept. of Biomedical Engine-ering Engineering Faculty, Turkey)
Polish Emotional Natural Speech Database . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Dorota Kamińska and Tomasz Sapiński and Adam Pelikant (Institute of Mechatronics and Informa-tion Systems Lodz Technical University, Poland)
SESSION A2 Passive Radar - ApplicationsRetrieving aircraft motion parameters, using acoustic passive radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Eugene Chervoniak, Rustem Sinitsyn, Felix Yanovsky (Electronics Department National Aviation University Kiev, Ukraine)
Passive radar imaging capabilities using space-borne commercial illuminators in surveillance applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
J.-L. Bárcena-Humanes, N. del-Rey-Maestre, M.P. Jarabo-Amores, D. Mata-Moya, P. Gomez-del--Hoyo (Signal Theory and Communications Department Polytechnic School, University of Alcal´a, Spain)
Signal Processing of GPS Radio Shadows Formed by Moving Targets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Chr. Kabakchiev (Sofia University, Bulgaria), I. Garvanov (ULSIT, Bulgaria), V. Be-har (IICT-BAS, Bulgaria), D. Kabakchieva (UNWE, Bulgaria), K. Kabakchiev (Uni-versity of Birmingham, UK), H. Rohling (TU Hamburg-Harburg, Germany), K. Kulpa (TU Warsaw, Poland), A. Yarovoy (TU Delft, The Netherland)
SESSION B2 Biomedical Signals II Application of fuzzy logic for Alzheimer’s disease diagnosis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Igor Krashenyi, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Javier Ramirez, Juan Manuel Gorriz (Department of Signal Theory, Telematics and Communications University of Granada, Spain)
R-R Interval Prediction for Adaptive Sensing of ECG Signal using Robust Regression . . . . . . . . . . . . . . . . . 89Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
Parameters analyzed of Higuchi’s fractal dimension for EEG brain signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Christian Flores Vega (School of Electrical Engineering, Universidad de Ingenieria y Tecnologia, Peru), Julien Noel (School of Energy Engineering, Universidad de Ingenieria y Tecno-logia, Peru)
k-NN Binary Classification of Heart Failures Using Myocardial Current Density Distribution Maps . . . . . 98Yevhenii Udovychenko, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Illya Chaikovsky (Glushkov Institute of Cybernetics of NAS of Ukraine, Ukraine)
6
Comparison of First Order Statistical and Autoregressive Model Features for Activity Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Ömer Kayaaltı (Erciyes University Dept. of Computer Technologies Develi Hüseyin Şahin Vocatio-nal College, Turkey), Musa Hakan Asyalı (Yıldız Technical University Dept. of Biomedical Engine-ering Engineering Faculty, Turkey)
Polish Emotional Natural Speech Database . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Dorota Kamińska and Tomasz Sapiński and Adam Pelikant (Institute of Mechatronics and Informa-tion Systems Lodz Technical University, Poland)
SESSION A2 Passive Radar - ApplicationsRetrieving aircraft motion parameters, using acoustic passive radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Eugene Chervoniak, Rustem Sinitsyn, Felix Yanovsky (Electronics Department National Aviation University Kiev, Ukraine)
Passive radar imaging capabilities using space-borne commercial illuminators in surveillance applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
J.-L. Bárcena-Humanes, N. del-Rey-Maestre, M.P. Jarabo-Amores, D. Mata-Moya, P. Gomez-del--Hoyo (Signal Theory and Communications Department Polytechnic School, University of Alcal´a, Spain)
Signal Processing of GPS Radio Shadows Formed by Moving Targets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Chr. Kabakchiev (Sofia University, Bulgaria), I. Garvanov (ULSIT, Bulgaria), V. Be-har (IICT-BAS, Bulgaria), D. Kabakchieva (UNWE, Bulgaria), K. Kabakchiev (Uni-versity of Birmingham, UK), H. Rohling (TU Hamburg-Harburg, Germany), K. Kulpa (TU Warsaw, Poland), A. Yarovoy (TU Delft, The Netherland)
SESSION B2 Biomedical Signals II Application of fuzzy logic for Alzheimer’s disease diagnosis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Igor Krashenyi, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Javier Ramirez, Juan Manuel Gorriz (Department of Signal Theory, Telematics and Communications University of Granada, Spain)
R-R Interval Prediction for Adaptive Sensing of ECG Signal using Robust Regression . . . . . . . . . . . . . . . . . 89Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
Parameters analyzed of Higuchi’s fractal dimension for EEG brain signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Christian Flores Vega (School of Electrical Engineering, Universidad de Ingenieria y Tecnologia, Peru), Julien Noel (School of Energy Engineering, Universidad de Ingenieria y Tecno-logia, Peru)
k-NN Binary Classification of Heart Failures Using Myocardial Current Density Distribution Maps . . . . . 98Yevhenii Udovychenko, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Illya Chaikovsky (Glushkov Institute of Cybernetics of NAS of Ukraine, Ukraine)
6
6

SESSION B3 Radar Front Ends A scalable computing platform for digital pulse compression and digital beamforming . . . . . . . . . . . . . . . . 105
Michał Meller, Łukasz Ćwikowski (Department of Information Processing, PIT-RADWAR S.A., Po-land)
C-band FMCW Radar Analog-Front-End for SAR/ISAR Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108K. Ndini, D. Gromek, M. Wielgo, P. Samczyński, M. Malanowski (Institute of Electronic Systems, Warsaw University of Technology, Poland)
Voltage tunable bandpass filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Arkadiusz Gołaszewski, Adam Abramowicz (Institute of Electronic Systems, Warsaw University of Technology, Poland)
Measurement of an Omnidirectional Antenna Pattern in an Anechoic Chamber and an Office Room with and without Time Domain Signal Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Przemyslaw Piasecki, Jakub Strycharz (Department of Passive Microwave Components and Anten-na Systems, PIT RADWAR S.A., Poland)
A New Concept of Dual-polarized, Wideband Corrugated Horn Array Antenna for High-resolution SAR Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Adam Raniszewski (PIT-RADWAR S.A., Poland)
SESSION A4 Noise Radars/MIMOFPGA-based Devices for Random Waveform Generation and Stepped Delay Signal Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Sergiy Lukin, Oleg Zemlyaniy and Konstantin Lukin (Usikov Institute for Radiophysics and Electro-nics NAS of Ukraine, Ukraine)
Radar Tomography via Time-Division MIMO Noise Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134K. Lukin, P. Vyplavin, V. Palamarchuk, S. Lukin, V.Kudryiashov, E. Mischenko (O.Ya. Usikov Institute for Radiophysics and Electronics, National Academy of Sciences of Ukraine, Ukraine)
Mismatched Filter for Range Sidelobes Suppression of Pseudo-Noise Signals . . . . . . . . . . . . . . . . . . . . . . . . 138Janusz S. Kulpa (Warsaw University of Technology, Institute of Electronic Systems, Poland)
Orthogonal Waveforms for Multiradar and MIMO Radar using Noise Radar Technology . . . . . . . . . . . . . . 142Francesco De Palo, Gaspare Galati (Department of Electronic Engineering, Tor Vergata University, Italy)
Simple X-band polarimetric micro–Doppler analyses of ground moving targets . . . . . . . . . . . . . . . . . . . . . . 146R. Rytel-Andrianik, P. Samczyński, M. Malanowski, A. Gromek, D. Gromek (Institute of Electronic Systems, Warsaw University of Technology, Poland), A. Meta, L. Corucci (MetaSensing BV Noor-dwijk, Netherlands)
SESSION B4 Signal Processing Signal Processing Methods for Fault Diagnostics in Engineering Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Mirosław Świercz (Faculty of Electrical Engineering Białystok University of Technology, Poland)
7
SESSION B3 Radar Front Ends A scalable computing platform for digital pulse compression and digital beamforming . . . . . . . . . . . . . . . . 105
Michał Meller, Łukasz Ćwikowski (Department of Information Processing, PIT-RADWAR S.A., Po-land)
C-band FMCW Radar Analog-Front-End for SAR/ISAR Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108K. Ndini, D. Gromek, M. Wielgo, P. Samczyński, M. Malanowski (Institute of Electronic Systems, Warsaw University of Technology, Poland)
Voltage tunable bandpass filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Arkadiusz Gołaszewski, Adam Abramowicz (Institute of Electronic Systems, Warsaw University of Technology, Poland)
Measurement of an Omnidirectional Antenna Pattern in an Anechoic Chamber and an Office Room with and without Time Domain Signal Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Przemyslaw Piasecki, Jakub Strycharz (Department of Passive Microwave Components and Anten-na Systems, PIT RADWAR S.A., Poland)
A New Concept of Dual-polarized, Wideband Corrugated Horn Array Antenna for High-resolution SAR Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Adam Raniszewski (PIT-RADWAR S.A., Poland)
SESSION A4 Noise Radars/MIMOFPGA-based Devices for Random Waveform Generation and Stepped Delay Signal Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Sergiy Lukin, Oleg Zemlyaniy and Konstantin Lukin (Usikov Institute for Radiophysics and Electro-nics NAS of Ukraine, Ukraine)
Radar Tomography via Time-Division MIMO Noise Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134K. Lukin, P. Vyplavin, V. Palamarchuk, S. Lukin, V.Kudryiashov, E. Mischenko (O.Ya. Usikov Institute for Radiophysics and Electronics, National Academy of Sciences of Ukraine, Ukraine)
Mismatched Filter for Range Sidelobes Suppression of Pseudo-Noise Signals . . . . . . . . . . . . . . . . . . . . . . . . 138Janusz S. Kulpa (Warsaw University of Technology, Institute of Electronic Systems, Poland)
Orthogonal Waveforms for Multiradar and MIMO Radar using Noise Radar Technology . . . . . . . . . . . . . . 142Francesco De Palo, Gaspare Galati (Department of Electronic Engineering, Tor Vergata University, Italy)
Simple X-band polarimetric micro–Doppler analyses of ground moving targets . . . . . . . . . . . . . . . . . . . . . . 146R. Rytel-Andrianik, P. Samczyński, M. Malanowski, A. Gromek, D. Gromek (Institute of Electronic Systems, Warsaw University of Technology, Poland), A. Meta, L. Corucci (MetaSensing BV Noor-dwijk, Netherlands)
SESSION B4 Signal Processing Signal Processing Methods for Fault Diagnostics in Engineering Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Mirosław Świercz (Faculty of Electrical Engineering Białystok University of Technology, Poland)
7
7

Studentized filter of time-frequency analysis and synthesis of the signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159Bogdan Semenov (National aviation university, Ukraine), Ihor Shelevytsky (Kryvyi Rih Pedagogical Institute, Ukraine)
Robust Number Plate Detector Based on Stroke Width Transform and Neural Network . . . . . . . . . . . . . . . 163Ievgen M. Gorovyi and Ivan O. Smirnov (Department of Microwave Electronics, Institute of Radio Astronomy of NAS of Ukraine, Ukraine)
Detection algorithm of non-Gaussian character of sample distribution and its implementation in radar data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Igor Prokopenko, Nadiya Babanska (Institute of Air Navigation National Aviation University, Ukraine)
Time of Arrival Estimation in Pulsar-Based Navigation Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Chr. Kabakchiev (Sofia University, Bulgaria), V. Behar (IICT-BAS, Bulgaria), P. Buist (NLR Amster-dam, The Netherland), I. Garvanov
SESSION A5 SAR / ISAR Efficient Data Focusing and Trajectory Reconstruction in Airborne SAR Systems . . . . . . . . . . . . . . . . . . . . 179
Ievgen M. Gorovyi, Oleksandr O. Bezvesilniy and Dmytro M. Vavriv (Depatment of Microwave Electronics, Institute of Radio Astronomy of NAS of Ukraine, Ukraine)
Motion Compensation for Unmanned Aerial Vehicle’s Synthetic Apperture Radar . . . . . . . . . . . . . . . . . . . . 184Michal Labowski, Piotr Kaniewski (Institute of Radioelectronics, Faculty of Electronics, Military University of Technology, Poland)
Implementation of a real-time unfocused SAR algorithm using various computing platforms . . . . . . . . . . 189Krzysztof Radecki, Piotr Samczyński, Krzysztof Kulpa, Jędrzej Drozdowicz (Institute of Electronic Systems,Warsaw University of Technology, Poland)
Real-time synthetic aperture radar imagery displaying application . Implementation and results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Krzysztof Borowiec (Institute of Electronic Systems, Warsaw University of Technology, Poland)
SESSION B5 Weather RadarsCapabilities and Potential of an Avionic Polarimetric Weather Radar Simulator . . . . . . . . . . . . . . . . . . . . . . 201
Alberto Lupidi, Stefano Lischi, Fabrizio Cuccoli, Fabrizio Berizzi (Consorzio Nazionale Interun. per le Telecom., CNIT National Lab. of Radar and Surveillance Systems, RaSS, Italy), Luca Facheris (Università di Firenze, Dept. of Information Engineering, Italy)
Airborne targets detection using weather radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206Stanisław Rzewuski, Krzysztof Kulpa, Artur Gromek (Warsaw University of Technology, Institute of Electronic Systems, Poland)
Dynamics of Drop Polarization Basis under Atmospheric Factors Influence . . . . . . . . . . . . . . . . . . . . . . . . . 210Yuliya Averyanova, Anatoliy Averyanov, Felix Yanovsky (National Aviation University, Ukraine)
A new model for retrieving information about turbulence intensity from radar signal . . . . . . . . . . . . . . . . . 214Felix J. Yanovsky, Daria M. Turenko (National Aviation University, Ukraine), A.C.P. Oude Nijhuis, O.A. Krasnov, and A. Yarovoy (TU-Delft, the Netherlands)
8
Studentized filter of time-frequency analysis and synthesis of the signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159Bogdan Semenov (National aviation university, Ukraine), Ihor Shelevytsky (Kryvyi Rih Pedagogical Institute, Ukraine)
Robust Number Plate Detector Based on Stroke Width Transform and Neural Network . . . . . . . . . . . . . . . 163Ievgen M. Gorovyi and Ivan O. Smirnov (Department of Microwave Electronics, Institute of Radio Astronomy of NAS of Ukraine, Ukraine)
Detection algorithm of non-Gaussian character of sample distribution and its implementation in radar data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Igor Prokopenko, Nadiya Babanska (Institute of Air Navigation National Aviation University, Ukraine)
Time of Arrival Estimation in Pulsar-Based Navigation Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Chr. Kabakchiev (Sofia University, Bulgaria), V. Behar (IICT-BAS, Bulgaria), P. Buist (NLR Amster-dam, The Netherland), I. Garvanov
SESSION A5 SAR / ISAR Efficient Data Focusing and Trajectory Reconstruction in Airborne SAR Systems . . . . . . . . . . . . . . . . . . . . 179
Ievgen M. Gorovyi, Oleksandr O. Bezvesilniy and Dmytro M. Vavriv (Depatment of Microwave Electronics, Institute of Radio Astronomy of NAS of Ukraine, Ukraine)
Motion Compensation for Unmanned Aerial Vehicle’s Synthetic Apperture Radar . . . . . . . . . . . . . . . . . . . . 184Michal Labowski, Piotr Kaniewski (Institute of Radioelectronics, Faculty of Electronics, Military University of Technology, Poland)
Implementation of a real-time unfocused SAR algorithm using various computing platforms . . . . . . . . . . 189Krzysztof Radecki, Piotr Samczyński, Krzysztof Kulpa, Jędrzej Drozdowicz (Institute of Electronic Systems,Warsaw University of Technology, Poland)
Real-time synthetic aperture radar imagery displaying application . Implementation and results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Krzysztof Borowiec (Institute of Electronic Systems, Warsaw University of Technology, Poland)
SESSION B5 Weather RadarsCapabilities and Potential of an Avionic Polarimetric Weather Radar Simulator . . . . . . . . . . . . . . . . . . . . . . 201
Alberto Lupidi, Stefano Lischi, Fabrizio Cuccoli, Fabrizio Berizzi (Consorzio Nazionale Interun. per le Telecom., CNIT National Lab. of Radar and Surveillance Systems, RaSS, Italy), Luca Facheris (Università di Firenze, Dept. of Information Engineering, Italy)
Airborne targets detection using weather radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206Stanisław Rzewuski, Krzysztof Kulpa, Artur Gromek (Warsaw University of Technology, Institute of Electronic Systems, Poland)
Dynamics of Drop Polarization Basis under Atmospheric Factors Influence . . . . . . . . . . . . . . . . . . . . . . . . . 210Yuliya Averyanova, Anatoliy Averyanov, Felix Yanovsky (National Aviation University, Ukraine)
A new model for retrieving information about turbulence intensity from radar signal . . . . . . . . . . . . . . . . . 214Felix J. Yanovsky, Daria M. Turenko (National Aviation University, Ukraine), A.C.P. Oude Nijhuis, O.A. Krasnov, and A. Yarovoy (TU-Delft, the Netherlands)
8
8

Time of Arrival Estimation in Pulsar-Based Navigation Systems
Chr. Kabakchiev Sofia University Sofia, Bulgaria
V. Behar IICT-BAS
Sofia, Bulgaria [email protected]
P. Buist NLR Amsterdam The Netherland
I. Garvanov ULSIT
Sofia, Bulgaria [email protected]
D. Kabakchieva UNWE
Sofia, Bulgaria [email protected]
M. Bentum Univ. Twente, Enschede,
The Netherlands [email protected]
Abstract —This paper focuses on the Time of Arrival (TOA)
estimation problem related to new application of pulsar signals for airplane-based navigation. The aim of the paper is to propose and evaluate a possible algorithm for TOA estimation that consists of epoch folding, filtering, CFAR detection, cross-correlation and TOA calculation. The TOA estimation algorithm proposed is verified using real experimental data obtained from the Westerbork radio observatory in The Netherlands. The performance of the proposed TOA algorithm is evaluated in terms of SNR at the cross-correlator input and the TOA accuracy.
Index Terms—Pulsar signal detection, estimation, navigation
I. INTRODUCTION Pulsars are rotating neutron stars that periodically emit
broadband electromagnetic pulses. The emission period is the same as the rotation period. Although individual pulses vary in strength and shape, the average pulse shape is stable and characterizes each pulsar. In [1-4, 6], the authors discuss the possibility of an autonomous system for navigation of airplanes that is based on pulsar timing data. The pulsar periodic signals have timing stabilities comparable to atomic clocks and provide characteristic temporal signatures that can be used as natural navigation beacons, quite similar to the use of GPS satellites for navigation on Earth. By comparing pulse arrival times measured on-board the spacecraft with predicted pulse arrivals at some reference location, the spacecraft position can be determined autonomously with accuracies on the order of 5 kilometres. Therefore this new technology is an alternative to standard navigation based on radio tracking by ground stations, without the disadvantages of uncertainty increasing with distance from Earth and the dependence on ground control. The practical realization of the idea of pulsar-based navigation in space is difficult, firstly, the insufficient number of known pulsars, and secondly - sophisticated technology to detect them. But in recent years the situation has
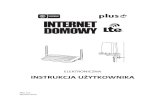
changed significantly. Since the discovery of the first pulsar in 1967, approximately 1800 pulsars have been found. The key problem in pulsar navigation systems is the estimation of the time of arrival (TOA) of the pulsar pulses [1]. If the pulsar pulses have a relatively stable width, then the TOA refers to some fiducial point of the pulsar profile. There are many algorithms to estimate the TOA of pulsar signals relatively to the pulsar template [6]. The cross-correlation (CC) method is basic solution of the TOA problem [6]. According to [1], the CC method correlates the signal after epoch folding with the pulsar template. The time argument that corresponds to the maximum peak in the output of the cross-correlation function is considered as an estimate of the time delay of the epoch folded signal. According to [1], the standard algorithm for TOA estimation of pulsar signals, implemented in most of radio observatories, usually includes epoch-folding (signal integration during a lot of pulse repetition periods) and correlation. The conceptual scheme of TOA estimation of pulsar signals is presented in Fig.1.
Figure 1. The basic concept of TOA estimation of pulsar signals
The key constraints towards the accuracy of TOA estimation are the very low signal-to-noise ratio (SNR) of the received pulsar signals, corrupted by impulsive interference, broadband interference and sometimes periodic terrestrial radiation, and
Receiver Folding Cross-Correlation
TOA Calculation
Pulsar template
Reference Clock
From Telescope
171
Time of Arrival Estimation in Pulsar-Based Navigation Systems
Chr. Kabakchiev Sofia University Sofia, Bulgaria
V. Behar IICT-BAS
Sofia, Bulgaria [email protected]
P. Buist NLR Amsterdam The Netherland
I. Garvanov ULSIT
Sofia, Bulgaria [email protected]
D. Kabakchieva UNWE
Sofia, Bulgaria [email protected]
M. Bentum Univ. Twente, Enschede,
The Netherlands [email protected]
Abstract —This paper focuses on the Time of Arrival (TOA)
estimation problem related to new application of pulsar signals for airplane-based navigation. The aim of the paper is to propose and evaluate a possible algorithm for TOA estimation that consists of epoch folding, filtering, CFAR detection, cross-correlation and TOA calculation. The TOA estimation algorithm proposed is verified using real experimental data obtained from the Westerbork radio observatory in The Netherlands. The performance of the proposed TOA algorithm is evaluated in terms of SNR at the cross-correlator input and the TOA accuracy.
Index Terms—Pulsar signal detection, estimation, navigation
I. INTRODUCTION Pulsars are rotating neutron stars that periodically emit
broadband electromagnetic pulses. The emission period is the same as the rotation period. Although individual pulses vary in strength and shape, the average pulse shape is stable and characterizes each pulsar. In [1-4, 6], the authors discuss the possibility of an autonomous system for navigation of airplanes that is based on pulsar timing data. The pulsar periodic signals have timing stabilities comparable to atomic clocks and provide characteristic temporal signatures that can be used as natural navigation beacons, quite similar to the use of GPS satellites for navigation on Earth. By comparing pulse arrival times measured on-board the spacecraft with predicted pulse arrivals at some reference location, the spacecraft position can be determined autonomously with accuracies on the order of 5 kilometres. Therefore this new technology is an alternative to standard navigation based on radio tracking by ground stations, without the disadvantages of uncertainty increasing with distance from Earth and the dependence on ground control. The practical realization of the idea of pulsar-based navigation in space is difficult, firstly, the insufficient number of known pulsars, and secondly - sophisticated technology to detect them. But in recent years the situation has
changed significantly. Since the discovery of the first pulsar in 1967, approximately 1800 pulsars have been found. The key problem in pulsar navigation systems is the estimation of the time of arrival (TOA) of the pulsar pulses [1]. If the pulsar pulses have a relatively stable width, then the TOA refers to some fiducial point of the pulsar profile. There are many algorithms to estimate the TOA of pulsar signals relatively to the pulsar template [6]. The cross-correlation (CC) method is basic solution of the TOA problem [6]. According to [1], the CC method correlates the signal after epoch folding with the pulsar template. The time argument that corresponds to the maximum peak in the output of the cross-correlation function is considered as an estimate of the time delay of the epoch folded signal. According to [1], the standard algorithm for TOA estimation of pulsar signals, implemented in most of radio observatories, usually includes epoch-folding (signal integration during a lot of pulse repetition periods) and correlation. The conceptual scheme of TOA estimation of pulsar signals is presented in Fig.1.
Figure 1. The basic concept of TOA estimation of pulsar signals
The key constraints towards the accuracy of TOA estimation are the very low signal-to-noise ratio (SNR) of the received pulsar signals, corrupted by impulsive interference, broadband interference and sometimes periodic terrestrial radiation, and
Receiver Folding Cross-Correlation
TOA Calculation
Pulsar template
Reference Clock
From Telescope
171
171
2015 Signal Processing Symposium (SPSympo), 10-12 June 2015, Debe, Poland2015 Signal Processing Symposium (SPSympo), 10-12 June 2015, Debe, Poland

the time-consuming processing of pulsar signals [3, 4]. As shown in [1], the accuracy of TOA estimation is inversely proportional to the level of SNR at the correlator input. To improve the correlation peak detection and time delay estimation, various filters can be used before the cross correlation. This technique is called generalized cross-correlation (GCC) [7]. The GCC method, proposed by Knapp and Carter, is the very popular technique due to their accuracy and computational complexity. The role of the filter in GCC method is to ensure a large sharp peak in the obtained cross-correlation thus ensuring a high time delay resolution.
In this paper we propose a possible algorithm to estimate TOA of pulsar signals that can be used in a pulsar-based navigation system mounted on the airplane board. The algorithm includes the following stages: epoch folding, filtering, automatic detection, time delay estimation and, finally, TOA calculation. After epoch folding and filtering, the filter output is processed by a CFAR detection algorithm. If the signal at the filter output is detected, then the time delay of the filtered signal relatively to the pulsar template can be estimated. The time argument that corresponds to the maximum peak in the output of the cross-correlation function is considered as an estimate of the time delay of the filtered signal. The TOA estimate is calculated on the base of the time delay estimate, reference clock and the filter group delay. In this algorithm the role of the filter is to improve SNR at the cross-correlator input and the role of the CFAR detector is to control false alarms. The TOA estimation accuracy of the proposed algorithm is evaluated using the experimental data obtained from the Westerbork radio observatory in The Netherlands. The experimental data contain the noisy signal received from pulsar B0329+54. The impact of each of the three filters, Moving Averaging Filter (MAF), MAF with Jumping Window (MAFJW) and the Matched Filter (MF), is evaluated in terms of SNR estimated at the filter output, and the corresponding accuracy of TOA estimation.
II. SIGNAL PROCESSING
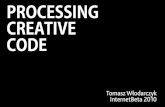
The block-scheme of the proposed algorithm for TOA estimation of pulsar signals is shown in Fig.2.
A. Epoch Folding The integration of the received signal during K sequential repetition periods of the input data (usually called as epoch folding) is done as non-coherent. It is the standard way that is implemented in most of radio observatories. After epoch-folding, the output signal y at time discrete n is formed as:
∑∑+ + + =kk
k k s k k sN QK
N IK
n x2
, 2 ,2
, 1 ,] [ 1 ] [ 1 ] [ (1)
In (1), Is,k and Qs,k are the quadrature components of the received pulsar signal in the k-th repetition period, N1,k and N2,k are quadrature components of zero mean Gaussian noise with variance σ
2 in the k-th period. As follows from (1), the
output signal x[n] is distributed according the non-central chi-square law with 2K degrees of freedom. It can be seen that for
K=1, the chi-square distribution becomes the exponential distribution.
Figure 2. Proposed algorithm for TOA estimation
B. Moving Average Filter The Moving Average Filter (MAF) is a simple low-pass FIR filter, which is often used for smoothing the sampled noisy signal. At a discrete time n, it takes (2N+1) samples from the moving window of the input data (xn-N, xn-N-1,…,xn-1, xn, xn+1,…,xn+N), calculates the average of those samples and produces an output sample yn. The MAF output is formed as:
∑−=−+
=N
N kk n xN
n y] [1 2
1 ] [ (2)
The filter impulse response in the time domain is 1/ (2N+1), where (2N+1) is the window length of the filter. The key problem is the optimal choice of the window length, i.e N. When choosing the window length of the MAF we must take into account not only the level of suppression of the noise variance, but the degree of distortion of the useful signal immersed in noise. If fcut is the highest frequency of the signal at the MAF output, then the improvement in SNR at the MAF output can be expressed as:
2
1
))2
cos( 2 1(1 2
1 ) (∑=
++
=N
ks
cut
fkf
NN Hπ (3)
From (3) follows that the optimal window size, i.e. (2Nopt+1) must be determined according to the following optimization criterion:
N optN H N)} ( max{ = (4)
C. Moving Average Filter with Jumping Window The Moving Average Filter with a Jumping Window (MAFJW) is a modified version of the MAF. It divides the period with N samples into L non-overlapping intervals (windows) of size M and calculates the average of samples in each interval. Therefore, the MAFJW acts not only as a low-
Input RF signal
Non-coherent Folding
Cross-correlation Pulsar template
Filtering (MAF, MAFJW and MF)
CFAR detection
Yes
TOA calculation
Pulsar template (For MF)
TOA
Reference Clock
172
the time-consuming processing of pulsar signals [3, 4]. As shown in [1], the accuracy of TOA estimation is inversely proportional to the level of SNR at the correlator input. To improve the correlation peak detection and time delay estimation, various filters can be used before the cross correlation. This technique is called generalized cross-correlation (GCC) [7]. The GCC method, proposed by Knapp and Carter, is the very popular technique due to their accuracy and computational complexity. The role of the filter in GCC method is to ensure a large sharp peak in the obtained cross-correlation thus ensuring a high time delay resolution.
In this paper we propose a possible algorithm to estimate TOA of pulsar signals that can be used in a pulsar-based navigation system mounted on the airplane board. The algorithm includes the following stages: epoch folding, filtering, automatic detection, time delay estimation and, finally, TOA calculation. After epoch folding and filtering, the filter output is processed by a CFAR detection algorithm. If the signal at the filter output is detected, then the time delay of the filtered signal relatively to the pulsar template can be estimated. The time argument that corresponds to the maximum peak in the output of the cross-correlation function is considered as an estimate of the time delay of the filtered signal. The TOA estimate is calculated on the base of the time delay estimate, reference clock and the filter group delay. In this algorithm the role of the filter is to improve SNR at the cross-correlator input and the role of the CFAR detector is to control false alarms. The TOA estimation accuracy of the proposed algorithm is evaluated using the experimental data obtained from the Westerbork radio observatory in The Netherlands. The experimental data contain the noisy signal received from pulsar B0329+54. The impact of each of the three filters, Moving Averaging Filter (MAF), MAF with Jumping Window (MAFJW) and the Matched Filter (MF), is evaluated in terms of SNR estimated at the filter output, and the corresponding accuracy of TOA estimation.
II. SIGNAL PROCESSING
The block-scheme of the proposed algorithm for TOA estimation of pulsar signals is shown in Fig.2.
A. Epoch Folding The integration of the received signal during K sequential repetition periods of the input data (usually called as epoch folding) is done as non-coherent. It is the standard way that is implemented in most of radio observatories. After epoch-folding, the output signal y at time discrete n is formed as:
∑ ∑ +++=k k
kkskks NQK
NIK
nx 2,2,
2,1, ][1][1][ (1)
In (1), Is,k and Qs,k are the quadrature components of the received pulsar signal in the k-th repetition period, N1,k and N2,k are quadrature components of zero mean Gaussian noise with variance σ2 in the k-th period. As follows from (1), the output signal x[n] is distributed according the non-central chi-square law with 2K degrees of freedom. It can be seen that for
K=1, the chi-square distribution becomes the exponential distribution.
Figure 2. Proposed algorithm for TOA estimation
B. Moving Average Filter The Moving Average Filter (MAF) is a simple low-pass FIR filter, which is often used for smoothing the sampled noisy signal. At a discrete time n, it takes (2N+1) samples from the moving window of the input data (xn-N, xn-N-1,…,xn-1, xn, xn+1,…,xn+N), calculates the average of those samples and produces an output sample yn. The MAF output is formed as:
∑ −=−
+= N
Nkknx
Nny ][
121][ (2)
The filter impulse response in the time domain is 1/ (2N+1), where (2N+1) is the window length of the filter. The key problem is the optimal choice of the window length, i.e N. When choosing the window length of the MAF we must take into account not only the level of suppression of the noise variance, but the degree of distortion of the useful signal immersed in noise. If fcut is the highest frequency of the signal at the MAF output, then the improvement in SNR at the MAF output can be expressed as:
2
1
))2
cos(21(12
1)( ∑=
++
=N
k s
cut
fkf
NNH
π (3)
From (3) follows that the optimal window size, i.e. (2Nopt+1) must be determined according to the following optimization criterion:
Nopt NHN )}(max{= (4)
C. Moving Average Filter with Jumping Window The Moving Average Filter with a Jumping Window (MAFJW) is a modified version of the MAF. It divides the period with N samples into L non-overlapping intervals (windows) of size M and calculates the average of samples in each interval. Therefore, the MAFJW acts not only as a low-
Input RF signal
Non-coherent Folding
Cross-correlation Pulsar template
Filtering (MAF, MAFJW and MF)
CFAR detection
Yes
TOA calculation
Pulsar template (For MF)
TOA
Reference Clock
172
172

pass filter but a decimator as well. When the signal processing is carried out in the time domain, the use of the MAFJW can be very useful in the sense of reducing the processing time.
D. Matched Filter According to the theory of matched filtering (MF), the filter impulse response is calculated as:
]1 [ / ]1 [ ] [+ − + − =n N p n N p n h (5) where p[n] is the pulsar template . The performance of the matched filter in the frequency domain can be expressed mathematically as:
)} ( ) ( { ] [f X f H IFFT n y⋅ = (6) H(f) is the frequency impulse response of the matched filter, and X(f) is the signal spectrum at the matched filter input.
E. CFAR Detection The CFAR detection approach is based on the criterion of Neyman – Pearson. According to this criterion, the following algorithm can be used for testing a simple hypothesis H1 (pulsar signal is present) against a simple alternative H0 (pulsar signal is absent):
otherwise H
l y T n y if HL
lfa
:
) ( )} ( max{ :
0
11∑=′ ⋅ ≥(7)
In the decision rule (7), y[n] is the signal power at the CFAR detector input, L is the size of a reference window for estimating the noise power and y’[l] are the signal power samples located in the noise zone, where l varies inside the interval [1, L]. In order to define the noise zone all input power samples y[n] are sorted in the ascended order and the first L sorted samples are defined as a noise zone. The detection constant Tfa is determined in accordance with the probability of false alarm, which is maintained by the detection algorithm. We assume that the hypothesis H1 is verified only in one single sample. Using the search strategy “Maximum” the probability of false alarm is defined as:
Nfa FAP P] 1[ 1− − = (8)
In (8), N is the total number of samples, and Pfa is the probability of false alarm in a single sample. In case of mean zero Gaussian noise at the receiver input, the probability of false alarm to be maintained in a single sample is:
Lfa faT P) 1/( 1+ = (9)
The probability Pfa is defined as a solution of the equation (8) for a given probability of false alarm PFA. The solution of (9) gives the detection constant:
1/ 1
− =−Lfa faP T (10)
F. TOA Estimation The Time of Arrival of pulsar signal is determined as:
group dif reft t t TOA− + = (11) In (11), tref is a reference clock, tdif is the time delay of the filtered signal relatively to the pulsar template, and tgroup is the group delay of the filter. The time difference tdif is the lag
of the cross-correlation peak. According to [1], the rough estimate of the accuracy of TOA estimation can be roughly estimated as:
N SNR Pcor TOA/ / ⋅ Δ = σ (12) In (12), Δ is the width of the normalized pulsar profile determined at the level of 0.7 (number of samples), P is the repetition period of pulsar signals (seconds), SNRcor is the value of SNR determined at the cross-correlator input, and N is the total number of samples within a repetition period.
G. SNR estimation The value of SNR at the correlator input is calculated as the following ratio:
) ( / )] ( [max ,n n s cory y mean y SNRσ − = (13) In the ratio (13) yS is the signal taken from the interval where the pulsar signal is present, and yn is the signal taken from the interval where only noise is present.
III. NUMERICAL RESULTS The aim of the study is to verify and evaluate the performance of the proposed algorithm for TOA estimation (shown in Fig.2) using the experimental records of the signals received from pulsar B0329+54 at the Westerbork radio observatory. The template of pulsar B0329+54 taken from the EPN database is sampled at the sampling rate of 1.4493 KHz and it contains 1024 samples. The experimental data are sampled at a frequency of 40 MHz, and the number of samples of the input signal within a repetition period is 28582316. In order to perform the matched filtering and the cross-correlation at the sampling frequency of 40 MHz, we approximated the pulsar template as a sum of three Gaussian pulses (Fig.3).
Figure 3.Template of the pulsar B0329+54
The corresponding amplitude spectrum of the pulsar template is shown in Fig. 4. It can be seen that the frequency bandwidth of the pulsar template is approximatly 200 Hz. In that case the cutoff frequency of 100 Hz can be used for optimization of the window length of the MAF filter using the optimization criterion (4).
173
pass filter but a decimator as well. When the signal processing is carried out in the time domain, the use of the MAFJW can be very useful in the sense of reducing the processing time.
D. Matched Filter According to the theory of matched filtering (MF), the filter impulse response is calculated as:
]1[/]1[][ +−+−= nNpnNpnh (5) where p[n] is the pulsar template . The performance of the matched filter in the frequency domain can be expressed mathematically as:
)}()({][ fXfHIFFTny ⋅= (6) H(f) is the frequency impulse response of the matched filter, and X(f) is the signal spectrum at the matched filter input.
E. CFAR Detection The CFAR detection approach is based on the criterion of Neyman – Pearson. According to this criterion, the following algorithm can be used for testing a simple hypothesis H1 (pulsar signal is present) against a simple alternative H0 (pulsar signal is absent):
otherwiseH
lyTnyifHL
lfa
:
)()}(max{:
0
11 ∑
=
′⋅≥(7)
In the decision rule (7), y[n] is the signal power at the CFAR detector input, L is the size of a reference window for estimating the noise power and y’[l] are the signal power samples located in the noise zone, where l varies inside the interval [1, L]. In order to define the noise zone all input power samples y[n] are sorted in the ascended order and the first L sorted samples are defined as a noise zone. The detection constant Tfa is determined in accordance with the probability of false alarm, which is maintained by the detection algorithm. We assume that the hypothesis H1 is verified only in one single sample. Using the search strategy “Maximum” the probability of false alarm is defined as:
NfaFA PP ]1[1 −−= (8)
In (8), N is the total number of samples, and Pfa is the probability of false alarm in a single sample. In case of mean zero Gaussian noise at the receiver input, the probability of false alarm to be maintained in a single sample is:
Lfafa TP )1/(1 += (9)
The probability Pfa is defined as a solution of the equation (8) for a given probability of false alarm PFA. The solution of (9) gives the detection constant:
1/1 −= − Lfafa PT (10)
F. TOA Estimation The Time of Arrival of pulsar signal is determined as:
groupdifref tttTOA −+= (11) In (11), tref is a reference clock, tdif is the time delay of the filtered signal relatively to the pulsar template, and tgroup is the group delay of the filter. The time difference tdif is the lag
of the cross-correlation peak. According to [1], the rough estimate of the accuracy of TOA estimation can be roughly estimated as:
NSNRP corTOA //⋅Δ=σ (12) In (12), Δ is the width of the normalized pulsar profile determined at the level of 0.7 (number of samples), P is the repetition period of pulsar signals (seconds), SNRcor is the value of SNR determined at the cross-correlator input, and N is the total number of samples within a repetition period.
G. SNR estimation The value of SNR at the correlator input is calculated as the following ratio:
)(/)]([ max, nnscor yymeanySNR σ−= (13) In the ratio (13) yS is the signal taken from the interval where the pulsar signal is present, and yn is the signal taken from the interval where only noise is present.
III. NUMERICAL RESULTS The aim of the study is to verify and evaluate the performance of the proposed algorithm for TOA estimation (shown in Fig.2) using the experimental records of the signals received from pulsar B0329+54 at the Westerbork radio observatory. The template of pulsar B0329+54 taken from the EPN database is sampled at the sampling rate of 1.4493 KHz and it contains 1024 samples. The experimental data are sampled at a frequency of 40 MHz, and the number of samples of the input signal within a repetition period is 28582316. In order to perform the matched filtering and the cross-correlation at the sampling frequency of 40 MHz, we approximated the pulsar template as a sum of three Gaussian pulses (Fig.3).
Figure 3.Template of the pulsar B0329+54
The corresponding amplitude spectrum of the pulsar template is shown in Fig. 4. It can be seen that the frequency bandwidth of the pulsar template is approximatly 200 Hz. In that case the cutoff frequency of 100 Hz can be used for optimization of the window length of the MAF filter using the optimization criterion (4).
173
173

Figure 4. Amplitude spectrum of the pulsar template
The SNR values calculated at the output of four types of signal processing are summarized in Table I. The first column in the table contains different numbers of integrated periods during the epoch-folding. The second column contains the SNR values estimated in case when before correlation only the epoch-folding procedure is performed. The next three columns contain the SNR values estimated in case when before correlation the signal processing includes two stages – epoch-folding and filtering. The optimal window length of the MAF is calculated using the optimization criterion (4) for fcut=100 Hz and fS=40 MHz.. The calculated MAF window is 148403.
TABLE I
Number of
Integrated Periods
SNR [dB]
Only
Folding
SNR [dB]
Folding &
MAFJW
Folding
& MAF
Folding
& MF
1 - 10.63 13.17 15.0 13 10.46 21.12 23.20 25.2 27 10.67 22.83 25.26 27.13 41 11.35 23.35 25.66 27.61 55 11.47 24.07 26.60 28.38 69 12.0 24.64 27.18 28.82 83 12.2 24.86 27.30 29.15 97 12.48 25.42 28.08 30.07 111 12.83 25.46 27.99 29.99 125 13.03 25.75 28.52 30.58
It can be seen that when the number of integrated periods is greater than 13, the SNR values at the output of the three filters are high enough in order to guarantee the high probability of signal detection at the CFAR detector output. The numerical results also show that the most values of SNR are achieved at the MF output. For comparison, the signals after epoch folding are shown in Fig.5 for 13 integrated periods and in Fig. 6 for 125 integrated periods. Comparing Fig. 5 and Fig.6 we can see that even 125 integrated periods are not sufficient for visible separation of the signal from noise.
00.511.522.53
x 107
0
200
400
600
800
1000
1200
1400Signal Power after folding
Time samples
Magnitude
Figure 5. Signal after epoch folding (13 periods)
00.511.522.53
x 107
100
150
200
250
300
350Signal Power after folding
Time samples
Magnitude
Figure 6. Signal after epoch folding (125 periods)
The cross-correlation coefficients between the epoch folded signal and the pulsar template are plotted in Fig.7 for 13 integrated periods and in Fig.8 for 125 integrated periods. It can be seen that in both case the cross-correlation coefficient does not exceed the level of 0.132. It means that the maximal value of the cross-correlation coefficient remains very low regardless of the increase in the number of periods. This explains the lower accuracy of TOA estimation accordinng to the standard approach, which is insufficient for reliable TOA estimation.
-5-4-3-2-1012345
x 106
0.11
0.112
0.114
0.116
0.118
0.12
0.122
0.124
0.126
0.128Cross-correlation after folding
Lag [time samples]
Norm
alized magnitude
Figure 7. Cross-correlation coefficient (13periods, max=0.127)
174
Figure 4. Amplitude spectrum of the pulsar template
The SNR values calculated at the output of four types of signal processing are summarized in Table I. The first column in the table contains different numbers of integrated periods during the epoch-folding. The second column contains the SNR values estimated in case when before correlation only the epoch-folding procedure is performed. The next three columns contain the SNR values estimated in case when before correlation the signal processing includes two stages – epoch-folding and filtering. The optimal window length of the MAF is calculated using the optimization criterion (4) for fcut=100 Hz and fS=40 MHz.. The calculated MAF window is 148403.
TABLE I
Number of
Integrated Periods
SNR [dB]
Only
Folding
SNR [dB]
Folding &
MAFJW
Folding
& MAF
Folding
& MF
1 - 10.63 13.17 15.0 13 10.46 21.12 23.20 25.2 27 10.67 22.83 25.26 27.13 41 11.35 23.35 25.66 27.61 55 11.47 24.07 26.60 28.38 69 12.0 24.64 27.18 28.82 83 12.2 24.86 27.30 29.15 97 12.48 25.42 28.08 30.07 111 12.83 25.46 27.99 29.99 125 13.03 25.75 28.52 30.58
It can be seen that when the number of integrated periods is greater than 13, the SNR values at the output of the three filters are high enough in order to guarantee the high probability of signal detection at the CFAR detector output. The numerical results also show that the most values of SNR are achieved at the MF output. For comparison, the signals after epoch folding are shown in Fig.5 for 13 integrated periods and in Fig. 6 for 125 integrated periods. Comparing Fig. 5 and Fig.6 we can see that even 125 integrated periods are not sufficient for visible separation of the signal from noise.
0 0.5 1 1.5 2 2.5 3
x 107
0
200
400
600
800
1000
1200
1400Signal Power after folding
Time samples
Mag
nitu
de
Figure 5. Signal after epoch folding (13 periods)
0 0.5 1 1.5 2 2.5 3
x 107
100
150
200
250
300
350Signal Power after folding
Time samples
Mag
nitu
de
Figure 6. Signal after epoch folding (125 periods)
The cross-correlation coefficients between the epoch folded signal and the pulsar template are plotted in Fig.7 for 13 integrated periods and in Fig.8 for 125 integrated periods. It can be seen that in both case the cross-correlation coefficient does not exceed the level of 0.132. It means that the maximal value of the cross-correlation coefficient remains very low regardless of the increase in the number of periods. This explains the lower accuracy of TOA estimation accordinng to the standard approach, which is insufficient for reliable TOA estimation.
-5 -4 -3 -2 -1 0 1 2 3 4 5
x 106
0.11
0.112
0.114
0.116
0.118
0.12
0.122
0.124
0.126
0.128Cross-correlation after folding
Lag [time samples]
Nor
mal
ized
mag
nitu
de
Figure 7. Cross-correlation coefficient (13periods, max=0.127)
174
174

-5-4-3-2-1012345
x 106
0.114
0.116
0.118
0.12
0.122
0.124
0.126
0.128
0.13
0.132Cross-correlation after folding
Lag [time samples]
Norm
alized magnitude
Figure 8. Cross-correlation coefficient (125 periods, max=0.131)
The output of the matched filter together with the CFAR threshold is shown in Fig.9. In contrary to Fig. 7 and Fig. 8, the cross-correlation coefficient between the MF output and the pulsar template is high and equals 0.81 (Fig.10).
00.511.522.53
x 107
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Detection: Matched filter output
Time samples
Norm
alized magnitude
signal powerCFAR threshold
Figure 9.The output of the MF (13 periods)
-5-4-3-2-1012345
x 106
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Cross-correlation after matched filter
Lag [time samples]
Norm
alized magnitude
Figure 10. Cross-correlation coefficient (13 periods, max=0.81)
The high value of the cross-correlation coefficient allows us to obtain the reliable estimate of the time delay of the filtered signal. Figure 10 also shows that the group delay of the matched filter must be taken into account in TOA calculation.
Table II contains the rough estimates of the accuracy of TOA estimation (σ TOA), which are calculated according to (12).
TABLE II Number
of integrated Periods
TOA accuracy [s]
Folding &
MAFJW
Folding &
MAF
Folding &
MF 1 3.0995·10
-4 1.7270·10
-4 1.1331·10
-4
13 2.7688·10-5 1.7151·10
-5 1.0821·10
-5
27 2.4748·10-5 1.0673·10
-5 6.9388·10
-6
41 1.6569·10-5 9.7339·10
-6 6.2128·10
-6
55 1.4037·10-5 7.8395·10
-6 5.2034·10
-6
69 1.2311·10-5 6.8594·10
-6 4.7020·10
-6
83 1.1703·10-5 6.6725·10
-6 4.3580·10
-6
97 1.0287·10-5 5.5575·10
-6 3.5260·10
-6
111 1.0193·10-5 5.6923·10
-6 3.6668·10
-6
125 9.5342·10-6 5.0383·10
-6 3.1354·10
-6
It can be seen that the accuracy of TOA estimation varies from 3·10
-4 s to 3·10
-6 s depending on the type of the used filter and
the number of integration periods.
IV. CONCLUSIONS A possible algorithm for TOA estimation of weak pulsar signals is proposed and evaluated using the experimental data of pulsar B0329+54 provided by the Westerbork radio observatory. The results obtained show that the presented algorithm can be successfully used for processing of pulsar signals.
ACKNOWLEDGMENT This work is partly financially supported by the project FNI T 02/2014 and the European FP7, project № 335063 (PulsarPlane).
REFERENCES [1] D. Lorimer, and M. Kramer, Handbook of pulsar astronomy, Cambridge
university press, N.Y.,2005 [2] J. Sala et al., “Feasibility study for a spacecraft navigation system
relying on pulsar timing information,” Tech. Rep. 03/4202, ARIADNA Study, June 2004.
[3] V. Chaudhri, “Fundamentals, Specifications, Architecture and Hardware towards Navigation System Based on Radio Pulsars”, M.Sc. Thesis, TU Delft, 2011
[4] P. Buist, S. Engelen, A. Noroozi, P. Sundaramoorthy, S. Verhagen, and C. Verhoeven,”Overview of Pulsar Navigation: Past, Present and Future Trends”,Journal of the Institute of Navigation”,vol.58, No 2, 2011, pp.153-164
[5] G. C. Carter: “Coherence and time delay estimation: an applied tutorial for research, development, test, and evaluation engineers”, Piscataway, NJ: IEEE Press, 1993
[6] R. Heusdens, S. Engelen, P. Buist, A. Noroozi,P. Sundaramoorthy, C. Verhoeven, M. Bentum, E. Gill, “Match Filtering Approach for Signal Acquisition in Radio-Pulsar Navigation”, Proc. of the 63rd International Astronautical Congress, Naples, Italy, 2012
[7] C. H. Knapp and C. G. Carter: “The generalized correlation method for estimation of time delay”, IEEE Trans, Acoust, Speech, Signal Processing, vol. ASSP-21, pp. 320-327, August 1976
175
-5 -4 -3 -2 -1 0 1 2 3 4 5
x 106
0.114
0.116
0.118
0.12
0.122
0.124
0.126
0.128
0.13
0.132Cross-correlation after folding
Lag [time samples]
Nor
mal
ized
mag
nitu
de
Figure 8. Cross-correlation coefficient (125 periods, max=0.131)
The output of the matched filter together with the CFAR threshold is shown in Fig.9. In contrary to Fig. 7 and Fig. 8, the cross-correlation coefficient between the MF output and the pulsar template is high and equals 0.81 (Fig.10).
0 0.5 1 1.5 2 2.5 3
x 107
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Detection: Matched filter output
Time samples
Nor
mal
ized
mag
nitu
de
signal powerCFAR threshold
Figure 9.The output of the MF (13 periods)
-5 -4 -3 -2 -1 0 1 2 3 4 5
x 106
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Cross-correlation after matched filter
Lag [time samples]
Nor
mal
ized
mag
nitu
de
Figure 10. Cross-correlation coefficient (13 periods, max=0.81)
The high value of the cross-correlation coefficient allows us to obtain the reliable estimate of the time delay of the filtered signal. Figure 10 also shows that the group delay of the matched filter must be taken into account in TOA calculation.
Table II contains the rough estimates of the accuracy of TOA estimation (σ TOA), which are calculated according to (12).
TABLE II Number
of integrated Periods
TOA accuracy [s]
Folding &
MAFJW
Folding &
MAF
Folding &
MF 1 3.0995·10-4 1.7270·10-4 1.1331·10-4
13 2.7688·10-5 1.7151·10-5 1.0821·10-5 27 2.4748·10-5 1.0673·10-5 6.9388·10-6 41 1.6569·10-5 9.7339·10-6 6.2128·10-6 55 1.4037·10-5 7.8395·10-6 5.2034·10-6 69 1.2311·10-5 6.8594·10-6 4.7020·10-6 83 1.1703·10-5 6.6725·10-6 4.3580·10-6 97 1.0287·10-5 5.5575·10-6 3.5260·10-6
111 1.0193·10-5 5.6923·10-6 3.6668·10-6 125 9.5342·10-6 5.0383·10-6 3.1354·10-6
It can be seen that the accuracy of TOA estimation varies from 3·10-4 s to 3·10-6 s depending on the type of the used filter and the number of integration periods.
IV. CONCLUSIONS A possible algorithm for TOA estimation of weak pulsar signals is proposed and evaluated using the experimental data of pulsar B0329+54 provided by the Westerbork radio observatory. The results obtained show that the presented algorithm can be successfully used for processing of pulsar signals.
ACKNOWLEDGMENT This work is partly financially supported by the project FNI T 02/2014 and the European FP7, project № 335063 (PulsarPlane).
REFERENCES [1] D. Lorimer, and M. Kramer, Handbook of pulsar astronomy, Cambridge
university press, N.Y.,2005 [2] J. Sala et al., “Feasibility study for a spacecraft navigation system
relying on pulsar timing information,” Tech. Rep. 03/4202, ARIADNA Study, June 2004.
[3] V. Chaudhri, “Fundamentals, Specifications, Architecture and Hardware towards Navigation System Based on Radio Pulsars”, M.Sc. Thesis, TU Delft, 2011
[4] P. Buist, S. Engelen, A. Noroozi, P. Sundaramoorthy, S. Verhagen, and C. Verhoeven,”Overview of Pulsar Navigation: Past, Present and Future Trends”,Journal of the Institute of Navigation”,vol.58, No 2, 2011, pp.153-164
[5] G. C. Carter: “Coherence and time delay estimation: an applied tutorial for research, development, test, and evaluation engineers”, Piscataway, NJ: IEEE Press, 1993
[6] R. Heusdens, S. Engelen, P. Buist, A. Noroozi,P. Sundaramoorthy, C. Verhoeven, M. Bentum, E. Gill, “Match Filtering Approach for Signal Acquisition in Radio-Pulsar Navigation”, Proc. of the 63rd International Astronautical Congress, Naples, Italy, 2012
[7] C. H. Knapp and C. G. Carter: “The generalized correlation method for estimation of time delay”, IEEE Trans, Acoust, Speech, Signal Processing, vol. ASSP-21, pp. 320-327, August 1976
175
175












![Wavelet2 - Zespół Przetwarzania Sygnałów [DSP AGH]poster-wavelet2.pdf · 2013-08-05 · Wavelet2 - Server for Signal and Language Processing Calculations Jakub Gałka, Bartosz](https://static.fdocuments.pl/doc/165x107/5f5ccd52dea5fb3f5f277b2b/wavelet2-zesp-przetwarzania-sygnaw-dsp-agh-poster-2013-08-05-wavelet2.jpg)



