
Elementy cyfrowe i układy logicznekmalecki.zut.edu.pl/ECiUL/ECiUL_wyklad_9_PLC.pdf · budowa -...
20
1 Elementy cyfrowe i uklady logiczne Wyklad 2 Legenda Programowalne Sterowniki Logiczne (PLC)
Transcript of Elementy cyfrowe i układy logicznekmalecki.zut.edu.pl/ECiUL/ECiUL_wyklad_9_PLC.pdf · budowa -...
1
Elementy cyfrowe i układy logiczne
Wykład
2222
Legenda
Programowalne Sterowniki Logiczne (PLC)
2
3333
Co to jest?
Sterowniki PLC(ang. Programmable Logic Controller)
są to takie sterowniki, których sposób
działania w postaci programu jest
pamiętany w sterowniku.
3
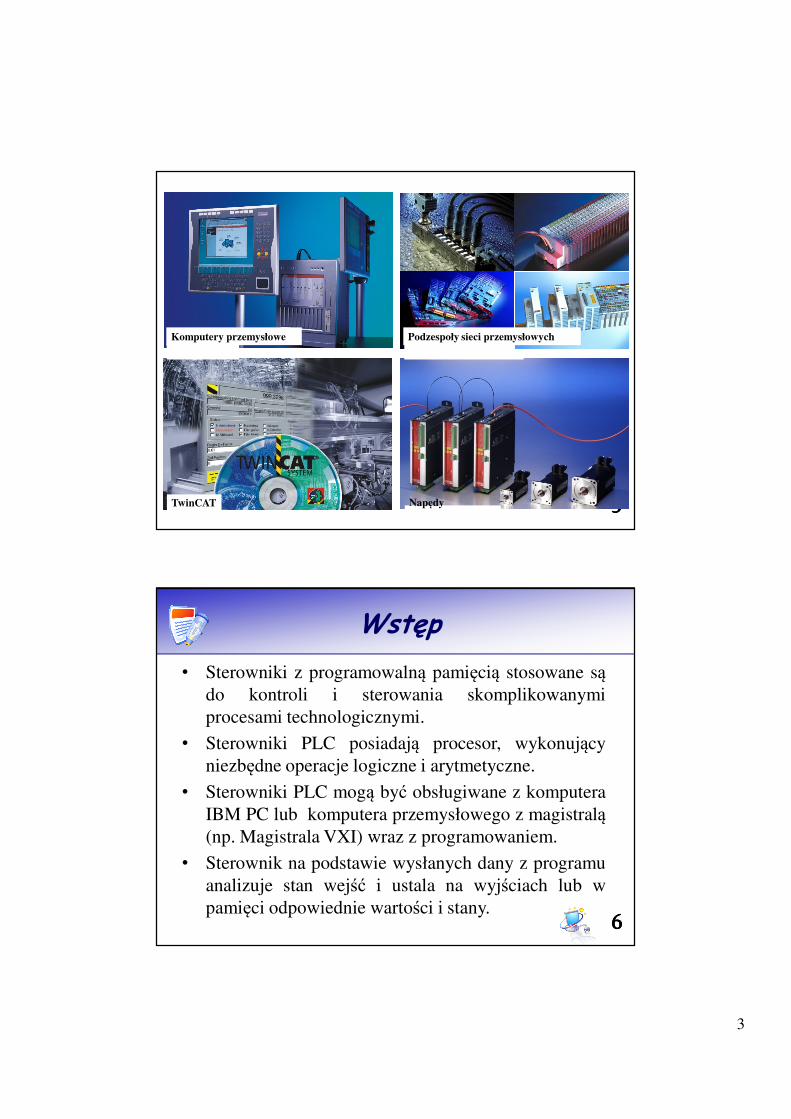
5555TwinCAT
Komputery przemysłowe
Napędy
Podzespoły sieci przemysłowych
6666
Wstęp
• Sterowniki z programowalną pamięcią stosowane są
do kontroli i sterowania skomplikowanymi
procesami technologicznymi.
• Sterowniki PLC posiadają procesor, wykonujący
niezbędne operacje logiczne i arytmetyczne.
• Sterowniki PLC mogą być obsługiwane z komputera
IBM PC lub komputera przemysłowego z magistralą
(np. Magistrala VXI) wraz z programowaniem.
• Sterownik na podstawie wysłanych dany z programu
analizuje stan wejść i ustala na wyjściach lub w
pamięci odpowiednie wartości i stany.
4
7777
Historia
� Rok 1968 - pierwszy sterownik dla przemysłusamochodowego (General Motors)
� Rok 1977 - zastosowanie mikroprocesora wsterownikach (Allan-Bradley)
� Lata 70' XX wieku - mikrokomputery sterujące
8888
Producenci sterowników PLC
• Siemens (Niemcy)
• Honeywell (USA)
• Allen Bradley (USA)
• Omron (Japonia)
• GE Fanuc (USA-Japonia)
• Hitachi (Japonia)
• Mitsubishi (Japonia)
• Matsushita (Japonia)
• AEG-Modicon (Niemcy-USA)
5
9999
Pożądane właściwości sterowników PLC
� łatwość programowania/zmiany programu, w tym równieżpodczas współpracy z obiektami, aby umożliwić łatwą i szybkąadaptację systemu do zmieniających się zadań sterowania
� niezawodne w warunkach bez klimatyzacji pracując w otoczeniu zdużymi wahaniami temperatury i dużymi zakłóceniamielektrycznymi, 24h na dobę
� łatwość montażu i napraw, najlepiej poprzez wymianępodzespołów (modułów)
� proste w konserwacji i proste do obsługiwania przez "osoby zwykształceniem średnim"
� możliwość komunikowania się z komputerami nadrzędnymi
� małe gabaryty
10101010
Cechy sterowników PLC� możliwości programowania
� prosty język opisu algorytmu sterowania
� bardzo łatwa forma programowania operacji logicznych
� wspomaganie w większości typowych funkcji przez specjalnysystem operacyjny czasu rzeczywistego
� łatwość uruchamiania algorytmu sterowania
� ułatwiona diagnostyka systemów sterowania
� przystosowanie do pracy w warunkach przemysłowych
� niższe koszty i opłacalność stosowania nawet w przypadkusterowania prostych obiektów
� szybkość przetwarzania
� modułowość
� elastyczność
� dokładność
� powtarzalność
6
11111111
Podział sterowników logicznych� wielkość
- małe – do 100 I/O- średnie – do 500 I/O- duże – ponad 500 I/O
� budowa- kompaktowa- modułowa
� moc obliczeniowa- wielkość pamięci programu- wielkość pamięci na zmienne- czas realizacji kilorozkazów
� rodzaj sygnałów wejściowych/wyjściowych- prądowe - analogowe- napięciowe - impulsowe- mieszane
12121212
Cechy charakterystyczne sterowników PLC
� specyficzny system operacyjny i sposób programowania
� język programowania zorientowany na wykonywanie nie tylkooperacji słownych, ale i bitowych
� przechowywanie programów użytkowych w pamięciEEPROM/FLASH i bateryjne podtrzymywanie pamięcioperacyjnej
� przystosowanie modułów wejść i wyjść do standardów napięćprzemysłowych
� duża obciążalność prądowa wyjść, umożliwiająca bezpośredniesterowanie układów wykonawczych
� przystosowanie konstrukcyjne do montażu w bezpośrednimotoczeniu obiektu sterowanego
� odporność na działania środowiska przemysłowego, bezkonieczności okresowej obsługi i konserwacji
7
13131313
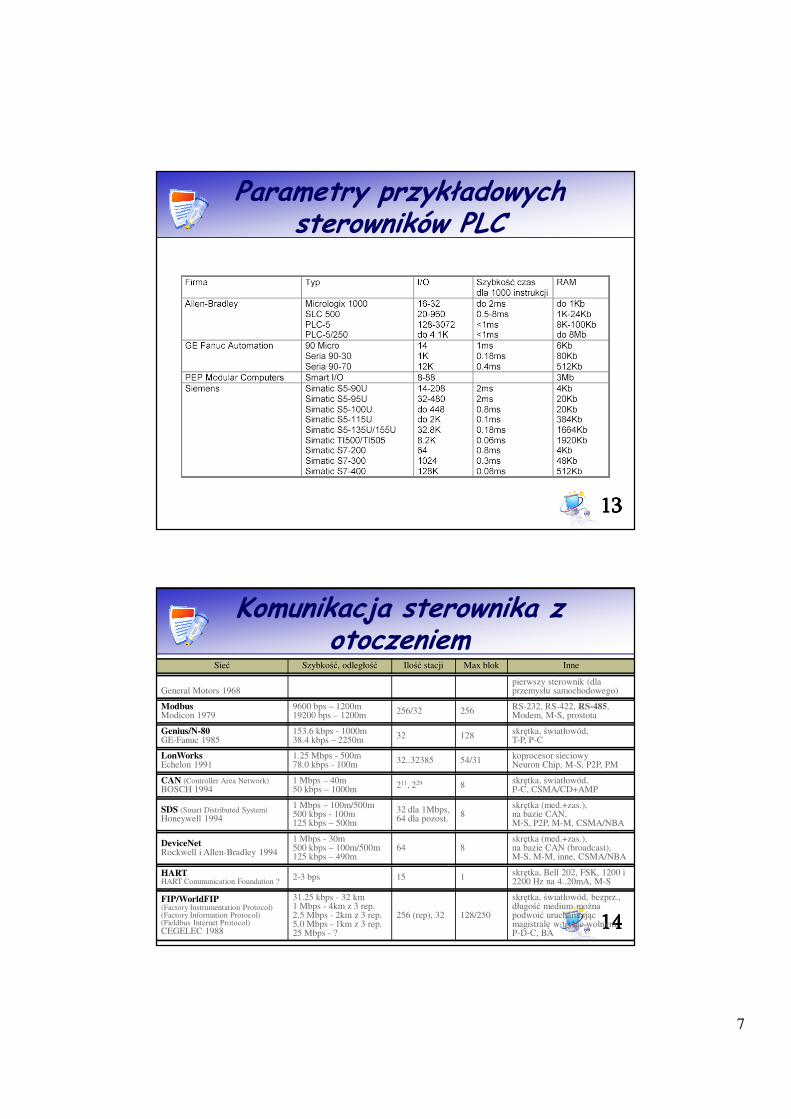
Parametry przykładowych sterowników PLC
14141414
Komunikacja sterownika z otoczeniem
Sieć Szybkość, odległość Ilość stacji Max blok Inne
ModbusModicon 1979
9600 bps – 1200m19200 bps – 1200m
256/32 256RS-232, RS-422, RS-485, Modem, M-S, prostota
Genius/N-80GE-Fanuc 1985
153.6 kbps - 1000m38.4 kbps – 2250m
32 128skrętka, światłowód,T-P, P-C
LonWorksEchelon 1991
1.25 Mbps - 500m78.0 kbps - 100m
32..32385 54/31koprocesor sieciowyNeuron Chip, M-S, P2P, PM
CAN (Controller Area Network)BOSCH 1994
1 Mbps – 40m50 kbps – 1000m
211, 229 8skrętka, światłowód,P-C, CSMA/CD+AMP
SDS (Smart Distributed System)Honeywell 1994
1 Mbps – 100m/500m500 kbps - 100m125 kbps – 500m
32 dla 1Mbps,64 dla pozost.
8skrętka (med.+zas.),na bazie CAN,M-S, P2P, M-M, CSMA/NBA
DeviceNetRockwell i Allen-Bradley 1994
1 Mbps - 30m500 kbps – 100m/500m125 kbps – 490m
64 8skrętka (med.+zas.),na bazie CAN (broadcast),M-S, M-M, inne, CSMA/NBA
HARTHART Communication Foundation ?
2-3 bps 15 1skrętka, Bell 202, FSK, 1200 i 2200 Hz na 4..20mA, M-S
FIP/WorldFIP(Factory Instrumentation Protocol)(Factory Information Protocol)(Fieldbus Internet Protocol)CEGELEC 1988
31.25 kbps - 32 km1 Mbps - 4km z 3 rep.2.5 Mbps - 2km z 3 rep.5.0 Mbps - 1km z 3 rep.25 Mbps - ?
256 (rep), 32 128/250
skrętka, światłowód, bezprz.,długość medium można podwoić uruchamiając magistralę w trybie wolnym,P-D-C, BA
General Motors 1968pierwszy sterownik (dla przemysłu samochodowego)
8
15151515
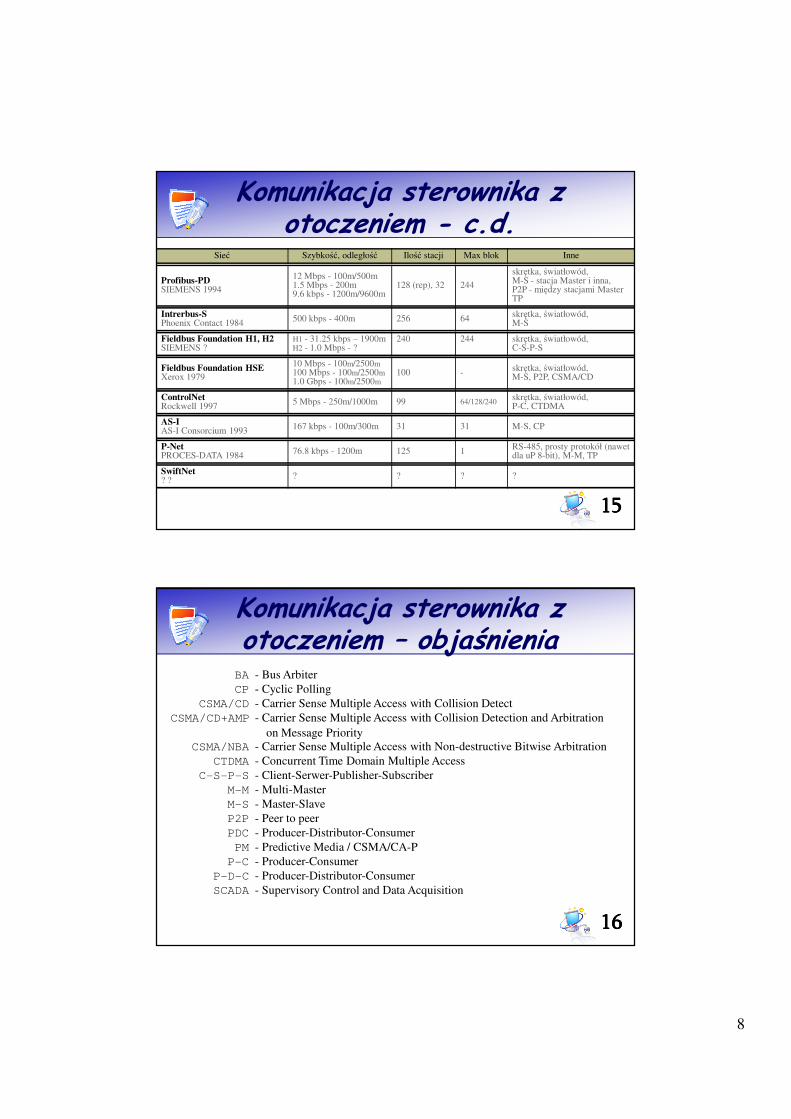
Komunikacja sterownika z otoczeniem - c.d.
Sieć Szybkość, odległość Ilość stacji Max blok Inne
Fieldbus Foundation HSEXerox 1979
10 Mbps - 100m/2500m100 Mbps - 100m/2500m1.0 Gbps - 100m/2500m
100 -skrętka, światłowód,M-S, P2P, CSMA/CD
Fieldbus Foundation H1, H2SIEMENS ?
H1 - 31.25 kbps – 1900mH2 - 1.0 Mbps - ?
240 244 skrętka, światłowód,C-S-P-S
ControlNetRockwell 1997
5 Mbps - 250m/1000m 99 64/128/240skrętka, światłowód,P-C, CTDMA
AS-IAS-I Consorcium 1993
167 kbps - 100m/300m 31 31 M-S, CP
P-NetPROCES-DATA 1984
76.8 kbps - 1200m 125 1RS-485, prosty protokół (nawet dla uP 8-bit), M-M, TP
SwiftNet? ?
? ? ? ?
Intrerbus-SPhoenix Contact 1984
500 kbps - 400m 256 64skrętka, światłowód,M-S
Profibus-PDSIEMENS 1994
12 Mbps - 100m/500m1.5 Mbps - 200m9.6 kbps - 1200m/9600m
128 (rep), 32 244
skrętka, światłowód,M-S - stacja Master i inna,P2P - między stacjami MasterTP
16161616
Komunikacja sterownika z otoczeniem – objaśnienia BA - Bus Arbiter
CP - Cyclic Polling
CSMA/CD - Carrier Sense Multiple Access with Collision Detect
CSMA/CD+AMP - Carrier Sense Multiple Access with Collision Detection and Arbitration
on Message Priority
CSMA/NBA - Carrier Sense Multiple Access with Non-destructive Bitwise Arbitration
CTDMA - Concurrent Time Domain Multiple Access
C-S-P-S - Client-Serwer-Publisher-Subscriber
M-M - Multi-Master
M-S - Master-Slave
P2P - Peer to peer
PDC - Producer-Distributor-Consumer
PM - Predictive Media / CSMA/CA-P
P-C - Producer-Consumer
P-D-C - Producer-Distributor-Consumer
SCADA - Supervisory Control and Data Acquisition
9
17171717
Zastosowania sieci przemysłowych
- komunikacja pomiędzy modułami sterowników
- komunikacja z czujnikami pomiarowymi
- komunikacja z inteligentnymi czujnikami i oprzyrządowaniem pracującymi na pętli prądowej 4..20mA
- zdalne programowanie i nadzór sterowników i innych urządzeń
- sterowanie i kontrola obwodów parametrów lotu w samolotach
- automatyzacja i sterowanie w pociągach
- automatyzacja pojazdów
- automatyzacja budynków
- systemy "inteligentnych budynków"
- systemy kontroli ruchu
- szybkie przesyłanie danych na nieduże odległości
- kontrola procesów przemysłowych
- monitorowanie i rejestrowanie danych pomiarowych
- komunikacja z systemami SCADA
18181818
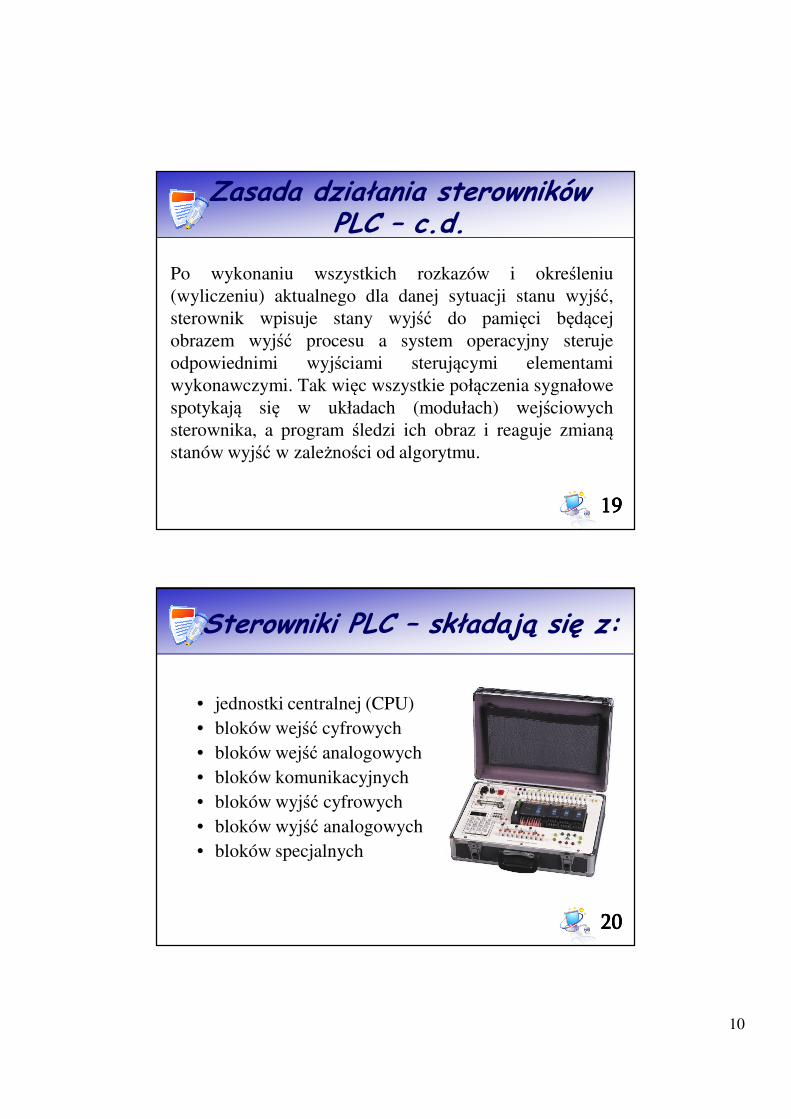
Zasada działania sterowników PLC
Podstawową zasadą pracy
sterowników jest praca cykliczna,
w której sterownik wykonuje
kolejno po sobie pojedyncze
rozkazy programu w takiej
kolejności, w jakiej są one
zapisane w programie. Na
początku każdego cyklu program
odczytuje "obraz" stanu wejść
sterownika i zapisuje ich stany.
10
19191919
Zasada działania sterowników PLC – c.d.
Po wykonaniu wszystkich rozkazów i określeniu
(wyliczeniu) aktualnego dla danej sytuacji stanu wyjść,
sterownik wpisuje stany wyjść do pamięci będącej
obrazem wyjść procesu a system operacyjny steruje
odpowiednimi wyjściami sterującymi elementami
wykonawczymi. Tak więc wszystkie połączenia sygnałowe
spotykają się w układach (modułach) wejściowych
sterownika, a program śledzi ich obraz i reaguje zmianą
stanów wyjść w zależności od algorytmu.
20202020
Sterowniki PLC – składają się z:
• jednostki centralnej (CPU)
• bloków wejść cyfrowych
• bloków wejść analogowych
• bloków komunikacyjnych
• bloków wyjść cyfrowych
• bloków wyjść analogowych
• bloków specjalnych
11
21212121
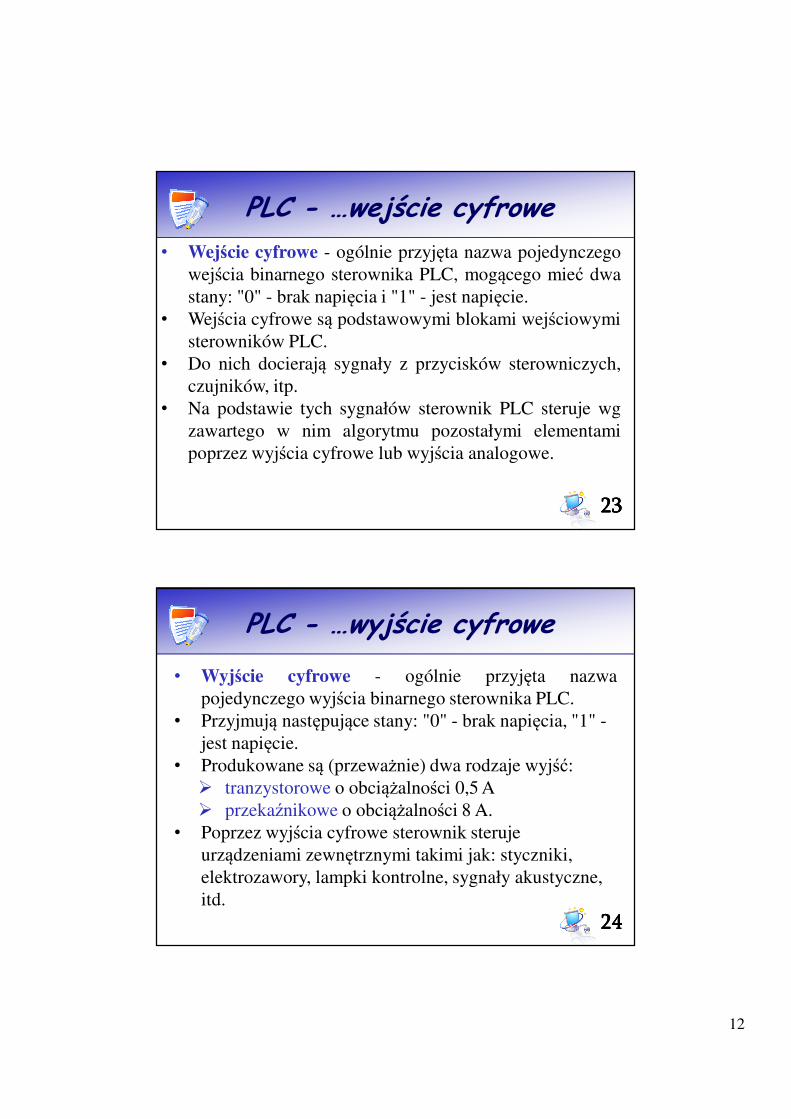
PLC - …jednostka centralna
Głównym elementem
każdego sterownika
jest jednostka
centralna, której
zadaniem jest:
• odczytywanie
stanów urządzenia,
• dokonywanie
operacji,
• określanie stanu
sterownika,
• synchronizacja
działania wszystkich
członów sterownika.
22222222
PLC - …jednostka centralna
• Jednostka centralna jest podstawowym elementem
decydującym o szybkości działania sterownika.
• Większość sterowników wyposażona jest w 16-bitowe
procesory, chociaż coraz częściej spotykamy się z
procesorami 32-bitowymi.
• Jednostka centralna może być wyposażona w kilka
procesorów.
• Sterowniki modułowe średniej wielkości posiadają
przeważnie 2 procesory, natomiast duże mają od kilku do
kilkunastu procesorów w swojej jednostce.
• Jednostki centralne CPU działają cyklicznie, pozwala to
na wykonywanie programu w ściśle określonym trybie.
12
23232323
PLC - …wejście cyfrowe
• Wejście cyfrowe - ogólnie przyjęta nazwa pojedynczego
wejścia binarnego sterownika PLC, mogącego mieć dwa
stany: "0" - brak napięcia i "1" - jest napięcie.
• Wejścia cyfrowe są podstawowymi blokami wejściowymi
sterowników PLC.
• Do nich docierają sygnały z przycisków sterowniczych,
czujników, itp.
• Na podstawie tych sygnałów sterownik PLC steruje wg
zawartego w nim algorytmu pozostałymi elementami
poprzez wyjścia cyfrowe lub wyjścia analogowe.
24242424
PLC - …wyjście cyfrowe
• Wyjście cyfrowe - ogólnie przyjęta nazwa
pojedynczego wyjścia binarnego sterownika PLC.
• Przyjmują następujące stany: "0" - brak napięcia, "1" -
jest napięcie.
• Produkowane są (przeważnie) dwa rodzaje wyjść:
� tranzystorowe o obciążalności 0,5 A
� przekaźnikowe o obciążalności 8 A.
• Poprzez wyjścia cyfrowe sterownik steruje
urządzeniami zewnętrznymi takimi jak: styczniki,
elektrozawory, lampki kontrolne, sygnały akustyczne,
itd.
13
25252525
PLC - …wejście analogowe
• Wejście analogowe - ogólnie przyjęta nazwa pojedynczego wejścia sterownika PLC dla standardowych sygnałów analogowych.
• Przyjęte standardy to: 0...20 mA, 4...20 mA, 0...10 V
• Służą do pomiarów m.in.: temperatury, ciśnienia, przepływu, obrotów, itp. Pomiary te odbywają się poprzez zamianę wartości np. temperatury na sygnał analogowy o wartości np. 0...10 V.
• Sygnały są przetwarzane w sterowniku, który reaguje wg ustalonego algorytmu.
26262626
PLC - …wyjście analogowe
• Wyjście analogowe - ogólnie przyjęta nazwapojedynczego wyjścia analogowego sterownikaPLC.
• Standardowe wyjścia analogowe mają wartości:0...20 mA, 4...20 mA, 0...10 V
• Jest podstawowym składnikiem bloków wyjśćanalogowych sterowników PLC.
• Sterownik poprzez te wyjścia może sterowaćurządzeniami zewnętrznymi takimi jak: regulatorytemperatury, przetwornica częstotliwości,serwonapęd, itp.
14
27272727
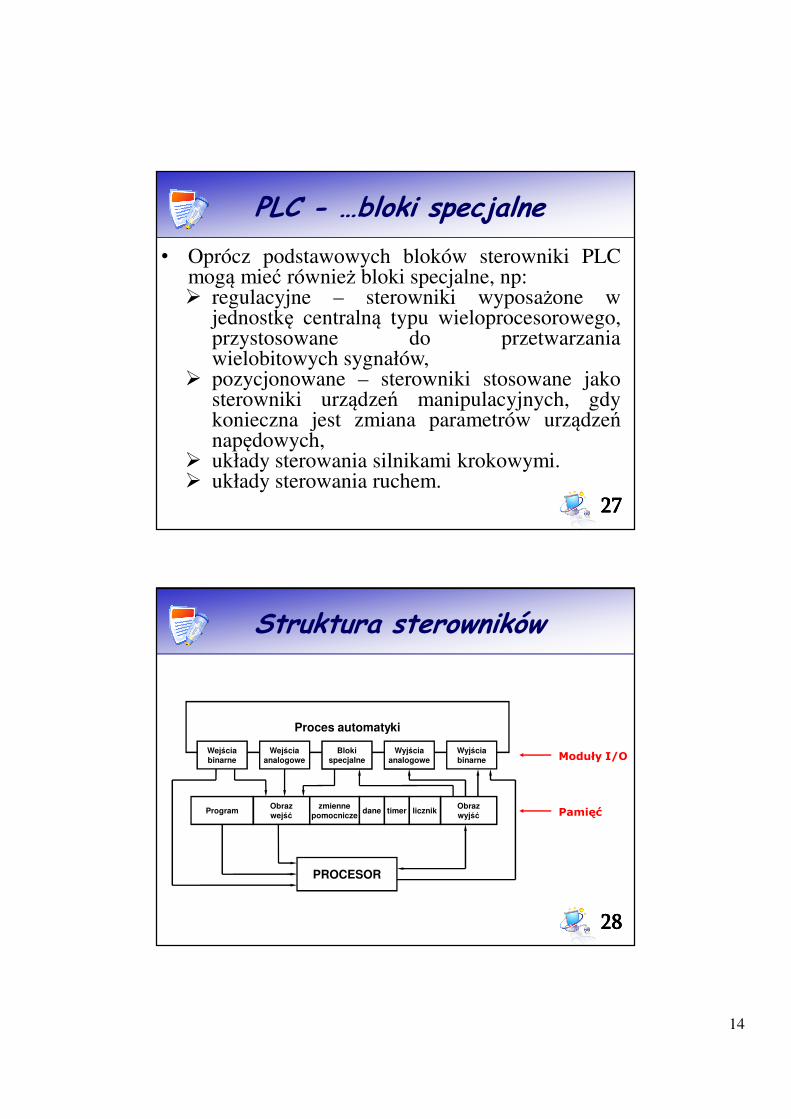
PLC - …bloki specjalne
• Oprócz podstawowych bloków sterowniki PLCmogą mieć również bloki specjalne, np:� regulacyjne – sterowniki wyposażone w
jednostkę centralną typu wieloprocesorowego,przystosowane do przetwarzaniawielobitowych sygnałów,
� pozycjonowane – sterowniki stosowane jakosterowniki urządzeń manipulacyjnych, gdykonieczna jest zmiana parametrów urządzeńnapędowych,
� układy sterowania silnikami krokowymi.� układy sterowania ruchem.
28282828
Struktura sterowników
Proces automatyki
Wyjściaanalogowe
Wejściabinarne
Wyjściabinarne
Wejściaanalogowe
ProgramObraz
wejśćlicznik
Obraz
wyjśćtimerdane
zmienne
pomocnicze
PROCESOR
Blokispecjalne Moduły I/O
Pamięć
15
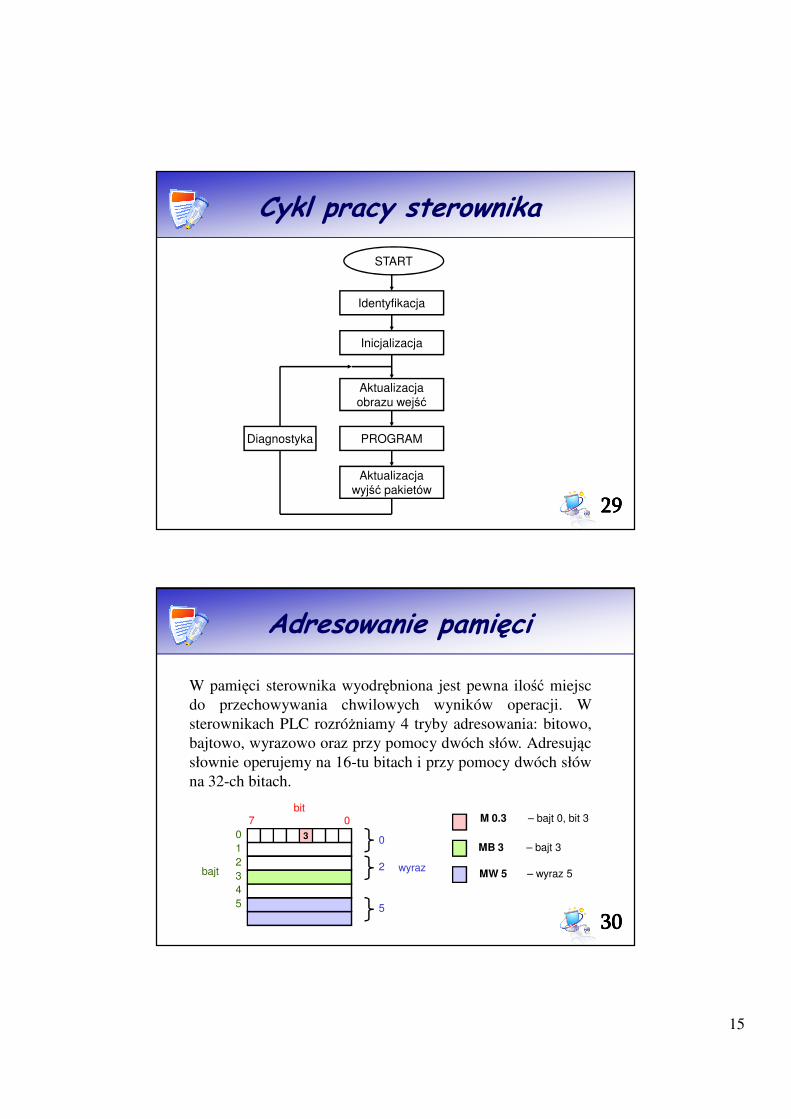
29292929
Cykl pracy sterownika
START
Identyfikacja
Inicjalizacja
Aktualizacja
obrazu wejść
PROGRAM
Aktualizacja
wyjść pakietów
Diagnostyka
30303030
Adresowanie pamięci
W pamięci sterownika wyodrębniona jest pewna ilość miejsc
do przechowywania chwilowych wyników operacji. W
sterownikach PLC rozróżniamy 4 tryby adresowania: bitowo,
bajtowo, wyrazowo oraz przy pomocy dwóch słów. Adresując
słownie operujemy na 16-tu bitach i przy pomocy dwóch słów
na 32-ch bitach.
0
1
2
3
4
5
0
2
5
07bit
bajt wyraz
3
M 0.3 – bajt 0, bit 3
MW 5 – wyraz 5
MB 3 – bajt 3
16
31313131
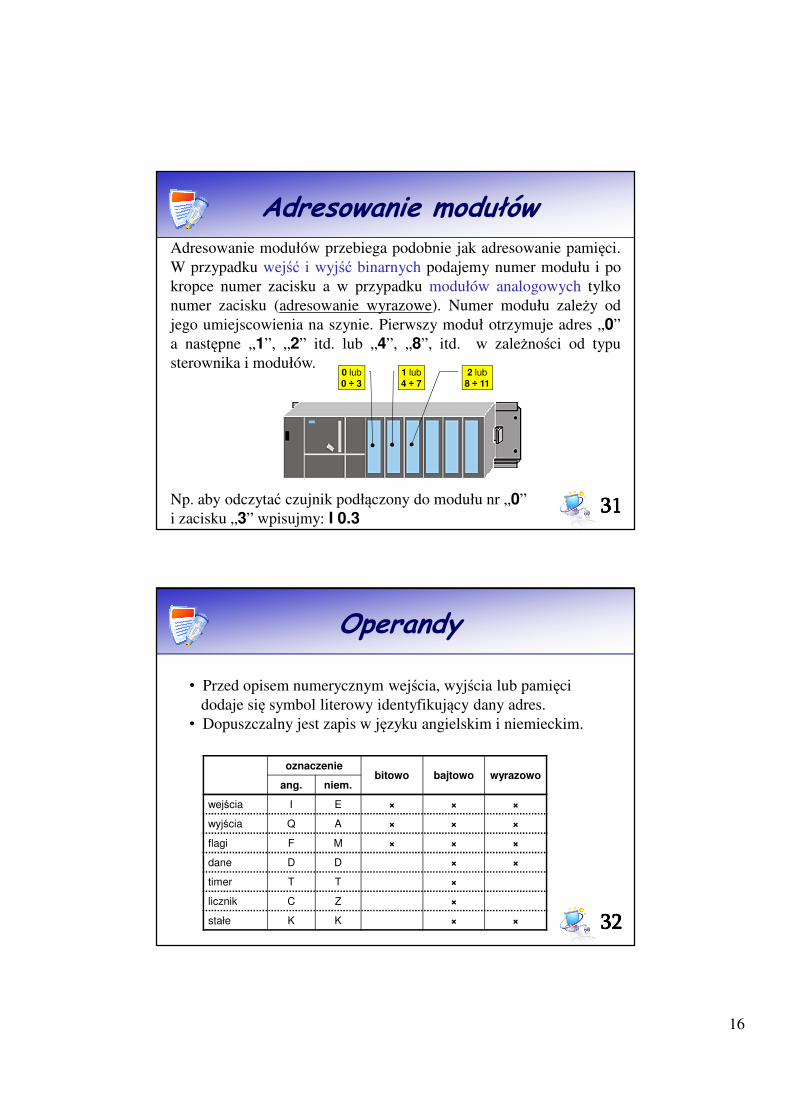
Adresowanie modułówAdresowanie modułów przebiega podobnie jak adresowanie pamięci.
W przypadku wejść i wyjść binarnych podajemy numer modułu i po
kropce numer zacisku a w przypadku modułów analogowych tylko
numer zacisku (adresowanie wyrazowe). Numer modułu zależy od
jego umiejscowienia na szynie. Pierwszy moduł otrzymuje adres „0”
a następne „1”, „2” itd. lub „4”, „8”, itd. w zależności od typu
sterownika i modułów.0 lub
0 ÷ 3
2 lub
8 ÷ 11
1 lub
4 ÷ 7
Np. aby odczytać czujnik podłączony do modułu nr „0”
i zacisku „3” wpisujmy: I 0.3
32323232
Operandy
• Przed opisem numerycznym wejścia, wyjścia lub pamięci
dodaje się symbol literowy identyfikujący dany adres.
• Dopuszczalny jest zapis w języku angielskim i niemieckim.
oznaczeniebitowo bajtowo wyrazowo
ang. niem.
wejścia I E × × ×
wyjścia Q A × × ×
flagi F M × × ×
dane D D × ×
timer T T ×
licznik C Z ×
stałe K K × ×
17
33333333
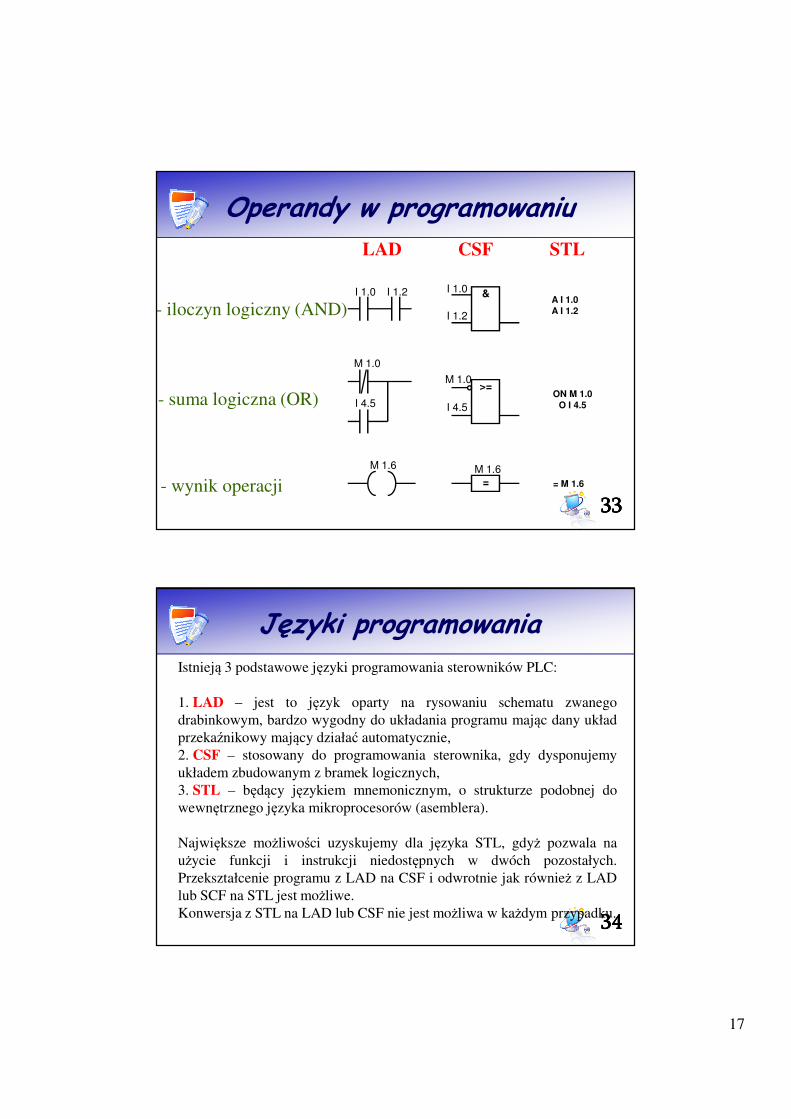
Operandy w programowaniu
&I 1.0 I 1.2 I 1.0
I 1.2
A I 1.0
A I 1.2
=
M 1.6
= M 1.6
M 1.6
LAD CSF STL
- iloczyn logiczny (AND)
- suma logiczna (OR)
- wynik operacji
M 1.0
I 4.5ON M 1.0
O I 4.5
>=M 1.0
I 4.5
34343434
Języki programowania
Istnieją 3 podstawowe języki programowania sterowników PLC:
1. LAD – jest to język oparty na rysowaniu schematu zwanego
drabinkowym, bardzo wygodny do układania programu mając dany układ
przekaźnikowy mający działać automatycznie,
2. CSF – stosowany do programowania sterownika, gdy dysponujemy
układem zbudowanym z bramek logicznych,
3. STL – będący językiem mnemonicznym, o strukturze podobnej do
wewnętrznego języka mikroprocesorów (asemblera).
Największe możliwości uzyskujemy dla języka STL, gdyż pozwala na
użycie funkcji i instrukcji niedostępnych w dwóch pozostałych.
Przekształcenie programu z LAD na CSF i odwrotnie jak również z LAD
lub SCF na STL jest możliwe.
Konwersja z STL na LAD lub CSF nie jest możliwa w każdym przypadku.
18
35353535
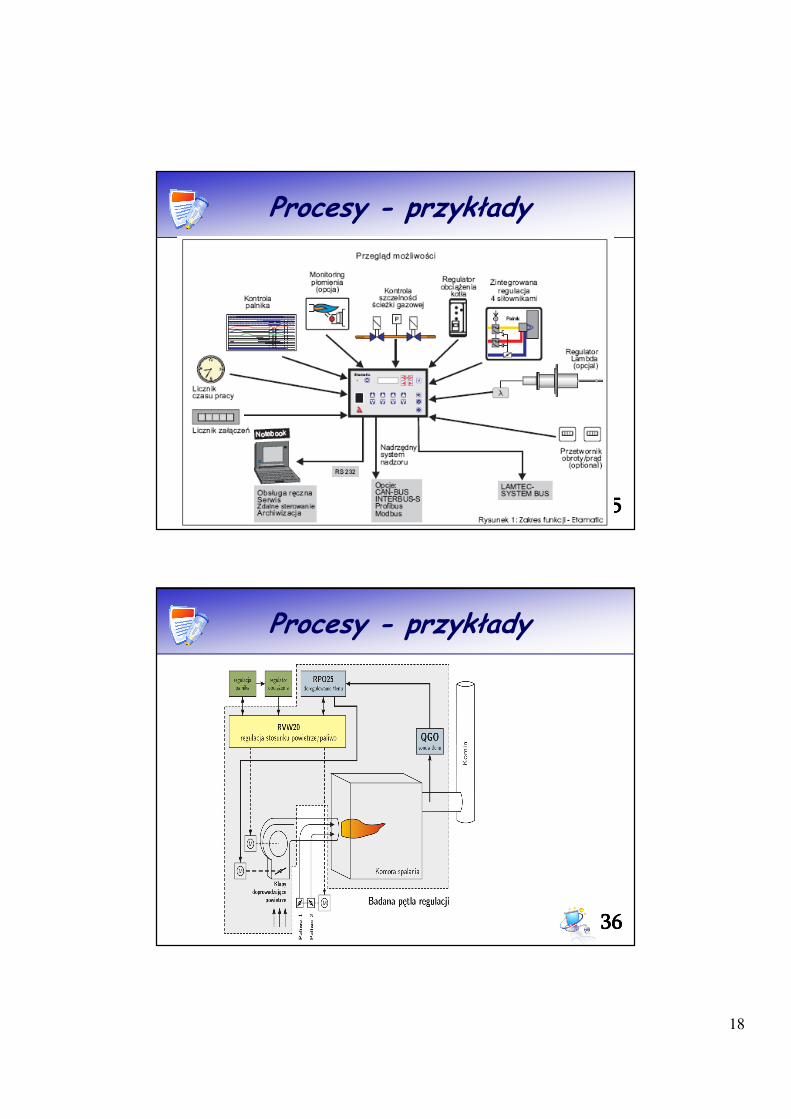
Procesy - przykłady
36363636
Procesy - przykłady
19
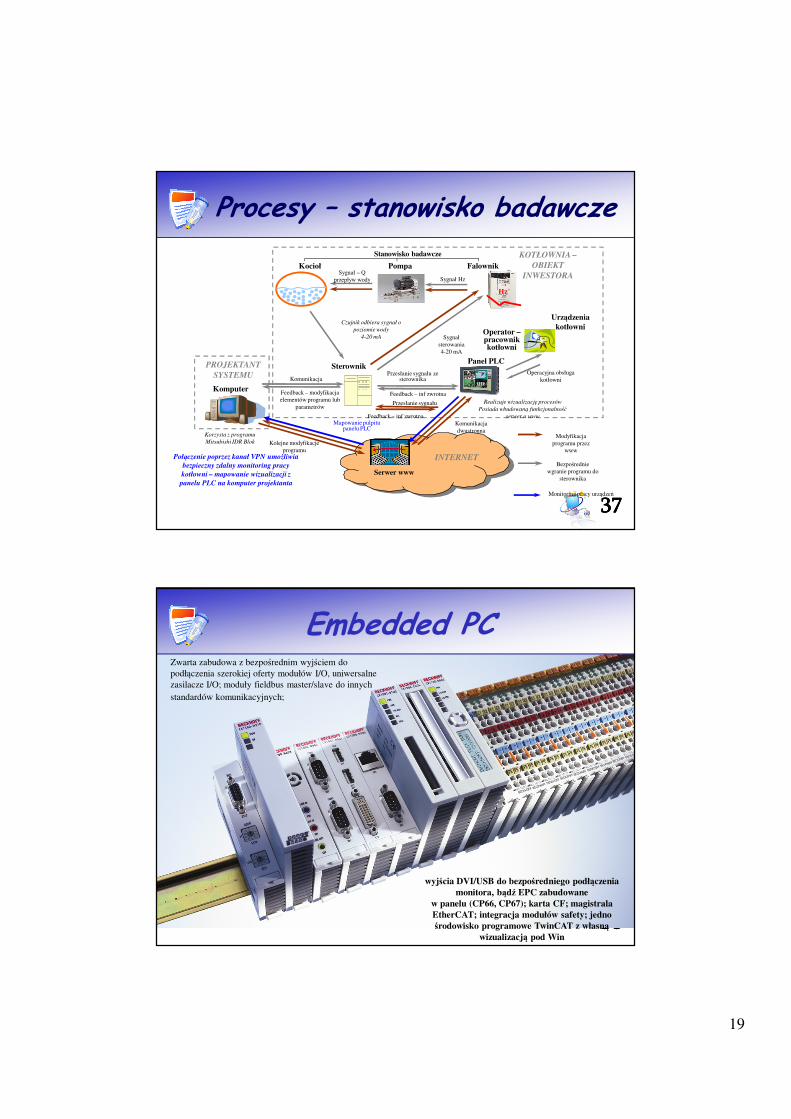
37373737
Procesy – stanowisko badawcze
Komputer
Kocioł Pompa Falownik
SterownikPanel PLC
Serwer www
KOTŁOWNIA –
OBIEKT
INWESTORA
PROJEKTANT
SYSTEMU
INTERNET
KomunikacjaPrzesłanie sygnału ze
sterownika
Korzysta z programu
Mitsubishi IDR Blok
Realizuje wizualizację procesów
Posiada wbudowaną funkcjonalność
serwer a www
Operacyjna obsługa
kotłowni
Sygnał
sterowania
4-20 mA
Sygnał HzSygnał – Q
przepływ wody
Czujnik odbiera sygnał o
poziomie wody
4-20 mA
Kolejne modyfikacje
programu
Przesłanie sygnału
Bezpośrednie
wgranie programu do
sterownika
Modyfikacja
programu przez
www
Feedback – modyfikacja
elementów programu lub
parametrów
Feedback – inf zwrotna
Feedback – inf zwrotna
Komunikacja
dwustronna
Stanowisko badawcze
Mapowanie pulpitu panelu PLC
Hz
Operator –pracownik kotłowni
Urządzenia
kotłowni
Połączenie poprzez kanał VPN umożliwia
bezpieczny zdalny monitoring pracy
kotłowni – mapowanie wizualizacji z
panelu PLC na komputer projektanta
Monitoring pracy urządzeń
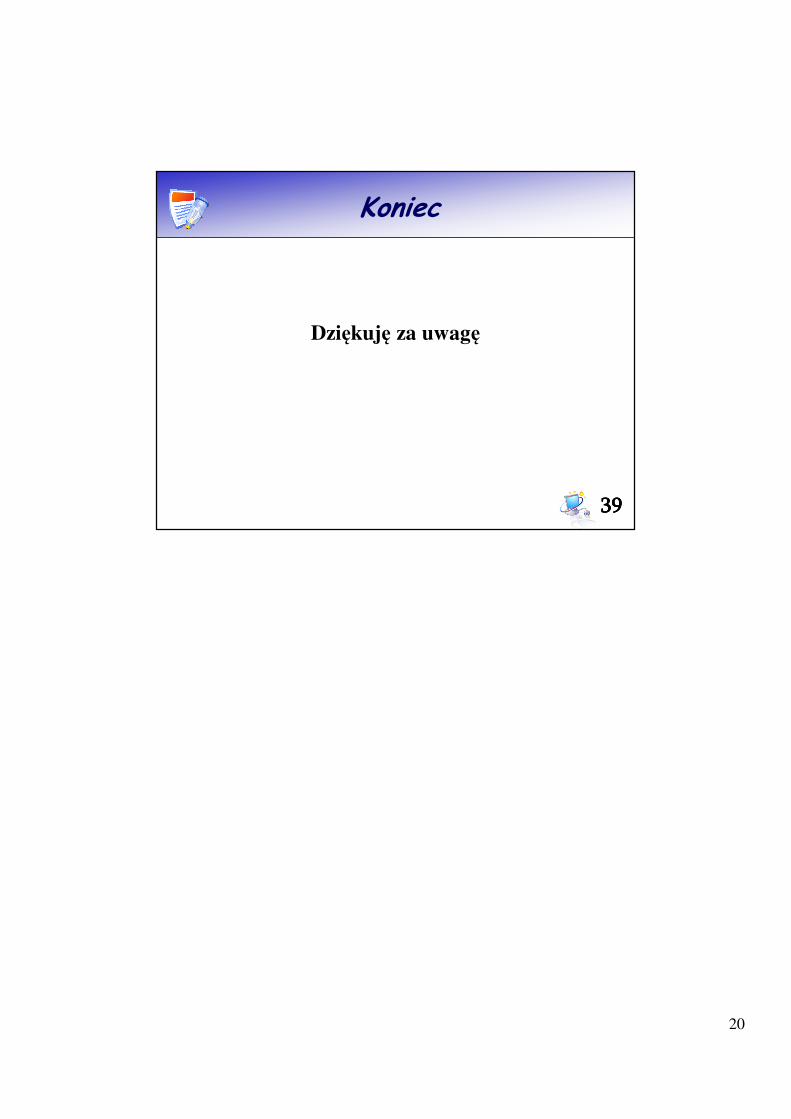
Embedded PC 38383838
Zwarta zabudowa z bezpośrednim wyjściem do
podłączenia szerokiej oferty modułów I/O, uniwersalne
zasilacze I/O; moduły fieldbus master/slave do innych
standardów komunikacyjnych;
wyjścia DVI/USB do bezpośredniego podłączenia
monitora, bądź EPC zabudowane
w panelu (CP66, CP67); karta CF; magistrala
EtherCAT; integracja modułów safety; jedno
środowisko programowe TwinCAT z własną
wizualizacją pod Win
Embedded PC
20
39393939
Koniec
Dziękuję za uwagę







![RAPORT O ODDZIAŁYWANIU NA RODOWISKO ę ś ę ś · 2019. 9. 5. · [ 16 ] Hydrologia – A. Byczkowski, Wydawnictwo SGGW Warszawa 1999 r. 2. RODZAJ, WIELKO ŚĆ I USYTUOWANIE INSTALACJI](https://static.fdocuments.pl/doc/165x107/6105605a00d9a166287fbbe8/raport-o-oddziaywaniu-na-rodowisko-2019-9-5-16-hydrologia.jpg)





![Prezentacja programu PowerPoint - dolnyslask.pl€¦ · Tabela z ulotki PARAMETR WIELKO ŚĆ Gęstość rzeczywista [g/cm3] 1,1 –2,5 Gęstość pozorna [g/cm3] 0,1 –0,6 Ogniotrwałość](https://static.fdocuments.pl/doc/165x107/605b24cc2c1838169a657a0b/prezentacja-programu-powerpoint-tabela-z-ulotki-parametr-wielko-gsto.jpg)