EGZOSZKIELET KOŃCZYNY GÓRNEJ - MODEL Z … · MIROSŁAW PAJOR, PAWEŁ HERBIN 40 EGZOSZKIELET...
7
MIROSŁAW PAJOR, PAWEŁ HERBIN 40 EGZOSZKIELET KOŃCZYNY GÓRNEJ - MODEL Z WYKORZYSTANIEM RZECZYWISTYCH PARAMETRÓW RUCHU Mirosław Pajor 1a , Paweł Herbin 1b, 1 Instytut Technologii Mechanicznej, Zachodniopomorski Uniwersytet Technologiczny w Szczecinie a [email protected], b [email protected], Streszczenie W nowoczesnych urządzeniach duży nacisk kładziony jest na komunikację pomiędzy operatorem a maszyną. Za- uważalny jest trend rozwoju interfejsów sterowania mających na celu zwiększenie interakcji pomiędzy człowiekiem i maszyną. Zastosowanie urządzeń skanujących ruchy człowieka często nie zapewnia wystarczającej interakcji z maszyną. Z pomocą przychodzą konstrukcje egzoszkieletowe umożliwiające realizacje sterowania z siłowym sprzężeniem zwrotnym. Zastosowanie tego typu sterowania umożliwia "odczucie" dynamiki, obciążenia oraz kolizji pomiędzy sterowanym urządzeniem a jego otoczeniem. Celem prowadzonych prac symulacyjnych było opracowa- nie podstawy matematycznej do budowy rzeczywistego urządzenia oraz układu sterowania Master-Slave. Uzyska- ne wyniki z modeli dynamicznych posłużyły jako dane obciążeń dla modeli obliczanych za pomocą metody ele- mentów skończonych. Słowa kluczowe: dynamika, robot, egzoszkielet, teleoperacja EXOSKELETON OF UPPER LIMB - MODEL USING REAL MOVEMENT PARAMETERS Summary In modern devices great emphasis is placed on communication between an operator and machine. Noticeable is the trend of development control interfaces designed to increase interaction between human and machine. The use of human movements scanning equipment often do not provide sufficient interaction with the machine. Come to the aid of exoskeletons constructions permitting the force-feedback control with feedback. Application of this type of control to make feel of dynamic loads and collisions between the controlled device and it is environment. Objective of the work was to create a simulation basis for the construction of real device and control system Mas- ter-Slave. The obtained results from dynamic models been used, as information load models computed using the finite element method. Keywords: dynamics, robot, exoskeleton, teleoperation 1. WSTĘP Zauważalny jest trend rozwoju interfejsów komunikacyj- nych człowiek-maszyna (HMI) w kierunku zwiększenia nacisku na ergonomię i intuicyjność obsługi urządzeń[1]. Skanowanie ruchu, sterowanie gestem kończyn górnych oraz głosem operatora umożliwia wykorzystanie natural- nych metod komunikacji człowieka. Metody te jednak nie umożliwiają obustronnej interakcji z maszyną[1,2]. Konieczne jest stworzenie interfejsu umożliwiającego przekazanie informacji do użytkownika o ograniczeniach dynamiki lub o zakresie przestrzeni roboczej, w której dane urządzanie może się poruszać. Jednym z rozwiązań może być wykorzystanie kontrolek lub komunikatów wyświetlanych na wyświetlaczu. Jednak rozwiązanie to z uwagi na konieczność koncentracji użytkownika nad wykonywaną czynnością może być nieskuteczne. Skano- wanie ruchu kończyny górnej oraz interakcja w postaci sprzężenia siłowego umożliwia integrację interfejsu ste- rowania z ruchami kończyny górnej. Urządzenie umożli-
Transcript of EGZOSZKIELET KOŃCZYNY GÓRNEJ - MODEL Z … · MIROSŁAW PAJOR, PAWEŁ HERBIN 40 EGZOSZKIELET...

MIROSŁAW PAJOR, PAWEŁ HERBIN
40
�
EGZOSZKIELET KOŃCZYNY GÓRNEJ -
MODEL Z WYKORZYSTANIEM
RZECZYWISTYCH PARAMETRÓW RUCHU
Mirosław Pajor1a, Paweł Herbin1b, �
1Instytut Technologii Mechanicznej, Zachodniopomorski Uniwersytet Technologiczny w Szczecinie [email protected], [email protected],
�
�
Streszczenie W nowoczesnych urządzeniach duży nacisk kładziony jest na komunikację pomiędzy operatorem a maszyną. Za-uważalny jest trend rozwoju interfejsów sterowania mających na celu zwiększenie interakcji pomiędzy człowiekiem i maszyną. Zastosowanie urządzeń skanujących ruchy człowieka często nie zapewnia wystarczającej interakcji z maszyną. Z pomocą przychodzą konstrukcje egzoszkieletowe umożliwiające realizacje sterowania z siłowym sprzężeniem zwrotnym. Zastosowanie tego typu sterowania umożliwia "odczucie" dynamiki, obciążenia oraz kolizji pomiędzy sterowanym urządzeniem a jego otoczeniem. Celem prowadzonych prac symulacyjnych było opracowa-nie podstawy matematycznej do budowy rzeczywistego urządzenia oraz układu sterowania Master-Slave. Uzyska-ne wyniki z modeli dynamicznych posłużyły jako dane obciążeń dla modeli obliczanych za pomocą metody ele-mentów skończonych.
Słowa kluczowe: dynamika, robot, egzoszkielet, teleoperacja
�
EXOSKELETON OF UPPER LIMB - MODEL USING REAL
MOVEMENT PARAMETERS
Summary In modern devices great emphasis is placed on communication between an operator and machine. Noticeable is the trend of development control interfaces designed to increase interaction between human and machine. The use of human movements scanning equipment often do not provide sufficient interaction with the machine. Come to the aid of exoskeletons constructions permitting the force-feedback control with feedback. Application of this type of control to make feel of dynamic loads and collisions between the controlled device and it is environment. Objective of the work was to create a simulation basis for the construction of real device and control system Mas-ter-Slave. The obtained results from dynamic models been used, as information load models computed using the finite element method.
Keywords: dynamics, robot, exoskeleton, teleoperation
1.� WSTĘP
Zauważalny jest trend rozwoju interfejsów komunikacyj-nych człowiek-maszyna (HMI) w kierunku zwiększenia nacisku na ergonomię i intuicyjność obsługi urządzeń[1]. Skanowanie ruchu, sterowanie gestem kończyn górnych oraz głosem operatora umożliwia wykorzystanie natural-nych metod komunikacji człowieka. Metody te jednak nie umożliwiają obustronnej interakcji z maszyną[1,2]. Konieczne jest stworzenie interfejsu umożliwiającego przekazanie informacji do użytkownika o ograniczeniach
dynamiki lub o zakresie przestrzeni roboczej, w której dane urządzanie może się poruszać. Jednym z rozwiązań może być wykorzystanie kontrolek lub komunikatów wyświetlanych na wyświetlaczu. Jednak rozwiązanie to z uwagi na konieczność koncentracji użytkownika nad wykonywaną czynnością może być nieskuteczne. Skano-wanie ruchu kończyny górnej oraz interakcja w postaci sprzężenia siłowego umożliwia integrację interfejsu ste-rowania z ruchami kończyny górnej. Urządzenie umożli-

EGZOSZK
wiające skanwane jest Egzoszkielet dzeniem umo
•� wzm•� wsp•� ster
stymzwro
Prace nad esą prowadzonwych[3,4,5,6,kinematyką, Zaobserwowaingerencji mPraca człowiwania uwzgleprzedstawionczłowiekiem a
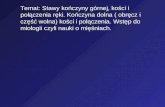
Rys. 1. Schem(HRI ang. Hum
Do najbardziczyć:
•� X-ATele
•� Uppof C
•� ALE
Wymienione wykorzystaniwirtualnymi[4kosmicznej z nego.
W ramach prjana jest konw układzie Mwia interakcsterującym wpraca jest wyniopomorskim
KIELET KO
nowanie wraz egzoszkieletemw rozumieniu
ożliwiającym:
mocnienie siły omaganie rehaowanie obiektmi z uwzględotnego.
egzoszkeletamne przez 7]. Powstałe ksposobem n
ane rozwiązanimaszyny z sysieka z maszynedniającego in
no przykładowa egzoszkielete
mat działania uman Robot Inter
iej zawansowa
ARM-2 erobotics & Haper-Limb ExosCalifornia, Los Ex- Wearable
zespoły badaiem egzoszkiel4,5] oraz do tuwzględnieni
rowadzonych pncepcja sterowMaster-Slave. cję urządzeniaw obydwu kierycinkiem projm Uniwersytec
OŃCZYNY G
ze sprzężeniemm (szkieletemu biomechanic
ludzkich mięśabilitacji, tami wirtualnydnieniem siło
mi kończyny gwiele zes
konstrukcje rónapędu oraz ia skupione sąstemem taktyną wymaga zantencje człowi
wy schemat intem.
układu robotyczrface)
anych konstru
EXOSKELETaptics Laboratskeleton EXOAngeles, BionRobotics [5,6]
awcze prowadletów do steroteleoperacji [3iem siłowego s
prac nad egzowania obiektamSterowanie te
a sterowanegorunkach (rys. 2ektu realizowcie Technolog
GÓRNEJ - M
m siłowym nam zewnętrznycznym jest ur
śni,
ymi lub rzeczyowego sprzęże
górnej człowispołów nauóżnią się od siefunkcjonalnoś
ą wokół probleylnym człowiestosowania steieka[5]. Na ryterfejsu pomię
znego egzoszkie
ukcji można z
TON- Etory [7]
O-UL7- Univernics lab [4]
dzą badania owania obiekt3,6] w przestrzsprzężenia zw
oszkieletem rozmi rzeczywistego typu umoo z urządzen2). Prezentowanego w Zach
gicznym w Sz
MODEL Z W
�
41
azy-ym). rzą-
ywi-enia
ieka uko-ebie ścią. emu eka. ero-s. 1
ędzy
�
eletu
zali-
ESA
rsity
nad ami zeni
wrot-
zwi-ymi ożli-niem wana hod-cze-
cinie, wania W ramukładuszy arMasterbadań doświakończy
W nintycznycowanytowanaz kinemna skła
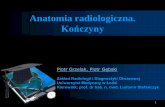
Rys. 2.
2.�
Na poczłowietematyz kinezbudow(D-H)[niach kinemaz osiamNa ryswspółrdelowametry
Tab.i
0
1
2
3
4
5
6
7
WYKORZYS
którego celemżurawiem sa
mach projektuu Master (egzortykuł dotyczr (egzoszkielebyło opracow
adczalnych, pyny górnej.
niejszym artyy kinematyki y na podstawa kinematykamatyką ludzkiadać się z moż
Schemat układ
MODEL
EGZOSZ
GÓRNEJ
odstawie budoeka [8] opracoyczny egzoszkematyką końwano na pods[9]. Modelowaswobody. Wszatycznymi obrmi obrotu possunkach 2 i 3rzędnych zwiąanego egzoszkD-H dla modu
1. Parametry Przegub
Baza
Bark
łokieć
nadgarstek
STANIEM R
m jest budowaamochodowym
u budowane sąoszkielet) orazzy modelu met). Celem prwanie modelu podczas który
kule przedstaprostej oraz d
wie następującea egzoszkieletuiej kończyny gżliwie najmnie
du sterowanie M
MATEMA
KIELETU
J
owy anatomiowano odpow
kieletu o kinemńczyny górnejstawie notacjiany obiekt reazystkie pary krotowymi o osszczególnych 3 zaprezentowązanych z kolekieletu. W tabułu ramienia.
D-H dla modu½Û ¦Û gÛ0° ¦´ g´�90° 0 0 �90° 0 0 0° Þ 0 �90° 0 0 �90° 0 ÞD�90° 0 0 �90° ÞE 0
RZECZYWI
a interaktywnm (układ Slaą modele matez Slave (żuraw
matematycznegrzeprowadzoneoraz wykona
ch rejestrowa
awiono modeldynamiki prosego założenia:u winna koresgórnej, jednakejszej liczby pr
Master-Slave
ATYCZNY
U KOŃCZ
icznej kończywiadający jej mmatyce korespj. Opis matei Denavita-Haalizuje ruch wkinematyczne siach pokrywaczęści kończyn
wano położenieejnymi elemenbeli 1 zestawi
ułu ramienia Û ΘÛ ´ 0 à � 90° àD � 90° àE � 90° àF � 90° àá � 90° àS � 90° àâ
ISTYCH...
nego stero-ave rys.2). ematyczne w). Niniej-go układu ego etapu
anie badań ano ruchy
l matema-stej, opra- zaprojek-spondować kże powin-rzegubów.�
�
Y
YNY
ny górnej model ma-pondującej ematyczny artenberga w 27 stop-są parami
ających się ny górnej. e układów ntami mo-iono para-


EGZOSZK
Tab.4. Masy ozoszkieletu
CzłonWspó
X [m
1 0
2 13
3 3
4 9
5 1
6 4
7 -
8 0Na podstawwyników pomracyjnych momomentu nastrowanych r
�
3.� OP
Przeprowadzgórnej podykprojektowaneantropometrymano wymagteryzujące kodzono także symalnych kczyny górnej.
Opracowaniei modelu kosię z położenstawów. Dla wykonano dw wieku 25 lpomiarów zos
Tab.5. Paletu ramie
i
Długość [mm]
Z uwagi na bcję egzoszkiewymiarów wkonieczne jesaby urządzenruchu stawów
KIELET KO
raz położenie śr
ółrzędne środk
mm] Y [mm
0 58
35 1
3 -44
99 0
2 0
41 0
7 93
0 0 wie stworzonegmiarów przebodelu matemapędowego wy
ruchów.
PIS BADA
enie analizy ktowane byłoego egzoszkielycznych końcgane w modeluończynę górnąbadanie mają
kątów oraz dy.
e modelu kinonstrukcji egzoniem i orienta
potrzeb przedla jednego lat i wadze 95stały zestawio
arametry wykenia
1
Xi 0
Yi 0
Zi 0
budowę ludzkeletu należy dwystępującychst ograniczeninie nie mogło w operatora.
OŃCZYNY G
rodków ciężkośc
ka ciężkości
m] Z [mm]
59
8
204
9
172
12
29
0 go modelu iiegów współrztycznego wyznmaganego do
AŃ
kinematyki luo koniecznościletu. Na podsczyny górnej u kinematyki ą danego osobące na celu wynamiki ruchó
nematyki oraoszkieletu wyacją osi obroteprowadzonychosobnika o kg. Wyniki p
one w tabelach
korzystane w m
2 3
0 0 30
0 0
0 300
kiej kończyny opasować do
h pomiędzy kie ruchomościwykonać ruch
GÓRNEJ - M
i elementów eg-
Masa
m [kg]
0,8
2,2
1,2
0,9
0,93
0,08
0,67
0 teracyjnego ozędnych konfinaczono przebrealizacji zar
udzkiej kończią lokalizacji stawie pomiaoperatora otrwielkości char
bnika. Przeprowyznaczenie mów ludzkiej k
az dynamiki ymaga zapozntu poszczególnh analiz pomwzroście 18
przeprowadzonh 5 oraz 6.
module egzosz
4 5 6
00 0 0
0 0 0
0 0 0
górnej, konstroperatora. Pr
kolejnymi osii przegubów thu poza zakre
MODEL Z W
�
43
-
oraz figu-biegi reje-
yny osi
arów rzy-rak-owa-mak-koń-
jak ania nych
miary 2cm nych
zkie-
7
0
0
0
ruk-rócz ami tak, sem
Tab.6.
W litewzajemmach prawejpowszejej prwzajemkończyw okrekątów szybkicwego z
Rys. 6. płaszcz
Na rysw płamarkerczyny w tabenym stw norm
WYKORZYS
Parametry wyk
Numer układ
23 �����4'����
1
X [m
Y [m
Z [m
2
X [m
Y [m
Z [m
3
X [m
Y [m
Z [m
4
X [m
Y [m
Z [m
5
X [m
Y [m
Z [m
eraturze opisymnego położen
badań wstępj kończyny gechnie znanej ostotę przy
mnego położenyny. Metoda eślonych płasz
dokonano zch Phantom zaprezentowan
Schemat stanowyzn wykorzysty
s. 6 zaprezentaszczyźnie horów wyznaczogórnej. Otrz
eli 7. Przedstatopniu zbliżonmie ISOM(z a
STANIEM R
korzystane w mo
du i 1
mm] 26
mm] 0
mm] 54
mm] 100
mm] 0
mm] 40
mm] 100
mm] 0
mm] 12
mm] 100
mm] 0
mm] -12
mm] 100
mm] 0
mm] -32
ywanych jest nia członów kpnych zrealizgórnej operatmetody SFTRzadowalającejnia kątowego
SFTR umozczyznach ciał wykorzystanv710. Schema
no na rys. 5.
wiska pomiarowywanych w meto
towano klatki oryzontalnej. ono kąty pomzymane wartoawione w tabne do zakresówang. Internatio
RZECZYWI
odule egzoszkiele
2 3 4
0 60 45
0 0 0
0 0 0
0 50 34
0 0 0
0 0 0
0 56 32
0 0 0
0 0 0
0 50 32
0 0 0
0 0 0
0 40 27
0 0 0
0 0 0
wiele metodkończyn [10,1owano pomia
tora z wykorR [12,13,14] zj dokładnościodpowiednich
ożliwia pomiła człowieka.�niem kamery at stanowiska
wego z uwzględnodzie SFTR
nagrania rucNa podstawi
między elemeności zostały zbeli 7 dane sąw ruchu prezenonal Standard
ISTYCH...
etu ręki
5
35
0
0
35
0
0
25
0
0
28
0
0
24
0
0
d pomiaru 1]. W ra-ary ruchu rzystaniem z uwagi na i pomiaru h członów ar kątów Pomiarów do zdjęć
a pomiaro-
nieniem
chu zgięcia ie pozycji
ntami koń-zestawione ą w znacz-ntowanych d Orthope-

dic Measuremliteraturze[8]
Tab.7. Zakresy
Naz
wa
staw
u
1
Obręcz kończyny
górnej
Staw łokciowy
Staw pro-mieniowo-nadgarst-
kowy
Staw nad-garstkowo-śródręczny
I
Staw śród-ręczno-
palcowy I
Staw śród-ręczno-
palcowy II-V
Staw mię-dzypalicz-
kowy I
Staw mię-dzypalicz-kowe bliż-sze II-V
Staw mię-dzypalicz-
kowe dalsze II-V
Model mwprowadzeniwie zarejestrelementów k
ments) oraz d.
y kątowe
rodz
aj r
uchu
2
wyprost-0-zgięcie
odwodzenie-0- przywodzenie
wyprost-0-zgiecie
rotacja zew-0-rot wew.
rotacja zew-0-rot wew.
wyprost-0-zgięcie
supinacja-0-pronacja
wyprost-0-zgięcie
Odwracanie-promieniowe-0-odwracanie łokciowe
wyprost-0-zgięcie
odwodzenie-0- przywodzenie
odprowadza-nie-0-obwodzenie
wyprost-0-zgięcie
wyprost-0-zgięcie
odwodzenie-0- przewodzenie
wyprost-0-zgięcie
wyprost-0-zgięcie
wyprost-0-zgięcie
matematycznya ograniczeni
rowanych dankończyny górn
MIR
do danych pr
Sym
bol pł
asz-
czyz
ny
Nor
my
wg
3
S 50-
F 17
T 30-
R(F0) 60
R(F90) 90
S 0-
R 90
S 50
F 20
VF 30
VS 4
CR 20
S 5-0-
S 30-0
F Zmi
S 15-0
S 0-0-
S 0-0-
y uzupełniona ruchu kątoych poprzez p
nej podczas ru
ROSŁAW PA
rzedstawionych
ISO
M w
sto
p-ni
ach
Zar
ejes
trow
ane
4 5
0-170 50-0-1
70-0-0 170-
0-135 27-0-1
0-0-70 60-0
0-0-80 90-0
0-150 0-0-1
0-0-80 89-0
0-0-60 50-0
0-0-30 20-0
0-0-15 30-0
40-0-0 40-
0-0-90 19-0
50 5-0-51
0-90 30-0-90
ienne
0-85 24-0-90
100 0-0-102
80 0-0-85
no o możliwowego na podpomiar położeuchów w okre
AJOR, PAW
44
h w
165
-0-0
135
0-70
0-78
148
0-78
0-55
0-32
0-18
-0-0
0-91
wość sta-enia eślo-
nych sczono jakie Uzyskanapędoprostej
�
4.�
Dla ottów wczeń wNa rysdla naprzeds
Rys. 7. kończyn
�
Rys. 8. czyźnie
Rys. 9.numer
WEŁ HERBI
stawach. Różmaksymalne można wygenane dane służowych przy użj.
WYNIK
trzymanych dymaganych do
wykorzystano sunkach 8 - 10ajbardziej obctawionego na
Zgięcie w płaszny górnej)
Wykresy param horyzontalnej
. Moment napę1
�� �� ����
��
��
��
�
�
! �+%�+����!&���2 �
IN
niczkując połprędkości i
nerować bez żą do wyznacżyciu opracow
KI
danych wykono realizacji zaopracowany m
0 zaprezentowaciążonych przrysunkach 6 o
zczyźnie horyzon
metrów ruchu po
ędowy wymaga
� �
'�������
łożenie kątowprzyspieszeniszkody dla czenia sił i m
wanego modelu
nano obliczeniadanego ruchumodel dynamiano momenty zegubów podcoraz 7.
ntalnej (staw ob
odczas zgięcia w
ny do ruchu w
� � �
we, wyzna-a kątowe, operatora. momentów u dynamiki
a momen-u. Do obli-ki prostej. napędowe zas ruchu
�bręczy
w płasz-
w przegubie
�

EGZOSZK
Rys. 10. Momenumer 2
Rys. 11. Momenumer 3
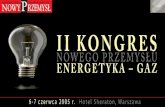
Wyznaczone węzły egzoszanaliz wytrzniem metodywielkości urzegzoszkieletuwane (kompkonstrukcyjnkoncepcyjnymNa rys. 11 modelu MESwahliwego owynikającymprezentuje rostrukcji propżonego siłamdynamiki prosztywnościowletu. Prace p�
Literatura
1.� Statecznunits. “A
2.� Pajor M„Napędy
3.� Schiele Aral Syste
�����
���
���
���
���
���
��
��
��
�
�
! �+%�+����!&���2 �
�����
���
�
��
��
��
��
��
��
��
! �+%�+����!&���2 �
KIELET KO
ent napędowy w
ent napędowy w
momenty nazkieletu posłuymałościowycy elementów ządzeń wykon. Zakładano b
ponenty handnych pod wzglęm zaproponoprzedstawionoS koncepcyjnosi 4 obciążo
mi z modelu dyozkład przemionowanego sił
mi i momentaostej. Obliczenwym poddano prowadzono it
a
ny K., Pajor MAdvances In M., Stateczny K
y i sterowanie”A.., van der Hems and Rehab
�� � �
�� � �
OŃCZYNY G
wymagany do ru
wymagany do ru
apędowe oraz żyły, jako da
ch wykonanycskończonych
nawczych napębowiem, że bęlowe nie speędem gabarytoowano napędo przykładownego hydrauliconego siłami oynamiki egozosieszczeń wystęłownika wahliami wyznaczoniom wytrzymkażdy z prze
teracyjnie w c
M.: Project of aManufacturingK., Urbański Ł” 2015, nr 1 s. elm F.C.T:: Kbilitation Eng
� �
'�������
� �
'�������
GÓRNEJ - M
uchu w przegubi
uchu w przegubi
siły obciążajane wejściowech z wykorzyoraz do oblicędzających ukędą one projekełniają wymogowym). Na etady hydrauliczwe symulacje cznego siłownoraz momentszkieletu. Rysępujących w kwego osi 4 obonymi z mod
małościowym ogubów egzoszcelu zminimal
a manipulationg Science And Ł.: Układ do m50-54.
Kinematic desgineering” 2006
� �
� �
MODEL Z W
�
45
ie
ie
jące do sta-czeń kład kto-gów apie zne. dla
nika ami . 11 kon-bcią-delu oraz zkie-lizo-
wania nia obc
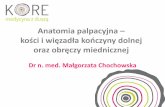
Rys. 12kinemamomen
5.�
EgzosztroniczZastoskorespupraszzmnieji analitów naegzoszkbezładdowycsowanitu końW takwymagpocząwmentówkończąJednymsensusumuszą planowekspermatemtu PBS
n system for mTechnology”2
manualnego pr
sign to improv6, No. 4, Vol.
WYKORZYS
masy egzoszkciążenia napęd
2. Rozkład przematycznej obrotowntami wynikając
PODSU
zkielet kończyznym, bardzoowanie mod
pondującego z zcza konstrukcszenie ilości iz umożliwiło apędowych, ktkieletu. Z uwa
dności na warh, w procesieie optymalizacńczyny górnej k zaawansowgane jest zastwszy od sensow występującąc na pomim z bardzo tu pomiędzy zze sobą wspó
wane jest wykymentalnych
matycznego.�PrS3/A6/28/201
manual movem2011, nr 4, p. rzesuwu zespo
ve ergonomics 14, p. 456-469
STANIEM R
kieletu, a co zdów.
�mieszczeń w mowej obciążonej mymi z modelu d
UMOWAN
yny górnej jeso zaawansowdelu kinematkinematyką lu
cję analizowanprzegubów. Pwyznaczenie
tóre wymaganagi na duży wrtość wymaga projektowanicji wymiarów ze względu n
wanym urządztosowanie wieorów położenicych w poszcarach elektrtrudnych zadazastosowanymółpracować. Wonanie modeluprowadzącychrace realizowa15 finansowane
ment of CNC m33-41.
ołów korpusow
in human mac9.
RZECZYWI
za tym idzie,
odelu siłownika maksymalnymi sdynamiki
NIE
st urządzeniemwanym techntycznego egzudzkiej kończy
nego urządzeniPrzeprowadzenmaksymalnyc
ne są do realizwpływ mas i manych momentia konieczne jelementów eg
na minimalizazeniu mechatelu rodzajów ia poprzez poczególnych promiograficznyań jest osiągn
mi komponentaW dalszym etu rzeczywistegh do weryfikacane są w ramaego przez NCB
machine tool b
wych obrabiark
chine interacti
ISTYCH...
zmniejsze-
�
3 pary siłami i
m mecha-ologicznie. zoszkieletu yny górnej ia, poprzez nie badań h momen-
zacji ruchu momentów tów napę-jest zasto-gzoszkiele-ację masy. ronicznym sensorów,
omiar mo-rzegubach, ych(EMG). nięcie kon-ami, które tapie prac go i badań cji modelu ach projek-BiR.
body
ki CNC.
ion. ”Neu-

MIROSŁAW PAJOR, PAWEŁ HERBIN
46
4.� Perry J.C., Rosen J., Burns S.: Upper-limb powered exoskeleton design. „IEEE Transactions on Mechatronics”, 2007, No. 4, Vol. tom 12, p. 408-417.
5.� Aiple M., Schiele A.: Pushing the limits of the CyberGraspTMfor haptic rendering. ”IEEE International Confer-ence of Robotics and Automation”, 2013, p. 3541-3546.
6.� Rebelo J., Schiele A.: Master-slave mapping and slave base placement optimization for intuitive and kinematically robust direct teleoperation. “IEEE International Conference on Control, Automation and Systems” 2012, p. 2017 – 2022.
7.� Schiele A., Hirzinger G.: A new generation of ergonomic exoskeletons – the high-performance X-Arm-2 for space robotics telepresence. “Intelligent Robots and Systems”, 2011, p. 2158 – 2165.
8.� Bochenek A., Reicher M., Bilikiewicz M.: Anatomia ogólna: kości, stawy i więzadła, mięśnie. Warszawa: Wyd. Lekarskie PZWL, 2007. ISBN 978-83-200-3682-4.
9.� Craig J.J.: Wprowadzenie do robotyki; mechanika i sterowanie. Warszawa: WNT, 1995. ISBN 83-204-1835-6. 10.� Chih-Ying Yang E.:: A novel measurement of intersegmental forces exerted on human lower limbs during for-
ward falling and regaining balance motions. “Measurement” 2015, No. 60, p. 114–120. 11.� Chih-Ying Yang E., Ming-Hsu Mao M.-H.: Analytical model for estimating intersegmental forces exerted on
human lower limbs during walking motion. “Measurement” 2014, No. 56, p. 30-36. 12.� Kinezyterapia. Pr. zbior. pod red. A. Zembatego. Kraków: Wyd. "Kasper", Sp. z o.o., 2002. ISBN 83-910437-4-6. 13.� Biomechanika narządu człowieka. Pr. zbior. pod red. D. Tejszerskiej, E. Świtońskiego, M. Gzika, Radom : Wyd.
Nauk. Instytutu Technologii Eksploatacji - PIB, 2011. ISBN 978-83-7204-998-8 14.� Buldt A.K., Levinger P., Murley G.S., Menz H.B., Nester C.J., LandorF K.B.: Foot posture is associated with
kinematics of the foot during gait: a comparison of normal, planus and cavus feet. “Gait & Posture” 2015, No. 42, p. 42-48.