DRGANIA UKŁADÓW O SKO CZONEJ LICZBIE STOPNI …pojazdy.utp.edu.pl/ksiazki/BDM/R4.pdf ·...
26
...wielkie umysly, myl podobnie... ROZDZIAL IV DRGANIA UKLADÓW O SKOCZONEJ LICZBIE STOPNI SWOBODY 1. WSTP 2. ZALOENIA DO BADA MODELI 3. DRGANIA UKLADÓW O JEDNYM STOPNIU SWOBODY 4. DRGANIA UKLADÓW O DWÓCH STOPNIACH SWOBODY 5. DRGANIA UKLADÓW O SKOCZONEJ LICZBIE STOPNI SWOBODY
Transcript of DRGANIA UKŁADÓW O SKO CZONEJ LICZBIE STOPNI …pojazdy.utp.edu.pl/ksiazki/BDM/R4.pdf ·...

...wielkie umysły, myl podobnie...
ROZDZIAŁ IV
DRGANIA UKŁADÓW
O SKOCZONEJ LICZBIE STOPNI SWOBODY
1. WSTP 2. ZAŁOENIA DO BADA MODELI 3. DRGANIA UKŁADÓW O JEDNYM STOPNIU SWOBODY 4. DRGANIA UKŁADÓW O DWÓCH STOPNIACH SWOBODY 5. DRGANIA UKŁADÓW O SKOCZONEJ LICZBIE STOPNI SWOBODY

1. WSTP
Głównym celem dynamicznego badania konstrukcji jest pomiar jej rzeczywistej
odpowiedzi dla oceny poprawnoci wyników rozwizania teoretycznego, czyli weryfikacja modelu matematycznego dla uzyskania informacji o obcieniach oraz innych parametrach, które s wymagane w analizie dynamicznej. Badania dynamiczne pozwalaj na wprowadzanie uzasadnionych zmian projektowych konstrukcji w celu podniesienia jej wartoci uytkowych i niezawodnoci działania.
W tym rozdziale przedstawiono podstawy teoretyczne opisu i analizy układów mechanicznych o rónym stopniu skomplikowania. Dotyczy to rónej liczby stopni swobody, decydujcej o skomplikowaniu modelu maszyny, a tym samym o złoonoci analizy matematycznej.
Z punktu widzenia liczby stopni swobody wprowadza si podział układów mechanicznych na: - układy o jednym stopniu swobody, - układy o skoczonej liczbie swobody (układy dyskretne), - układy o nieskoczonej liczbie stopni swobody.
Układ, który moe gromadzi tylko jedn posta energii i lokalizowa j tylko w jednym elemencie, jest nazywany układem dynamicznym pierwszego rzdu, gdy równania opisujce jego ruch s funkcj tylko jednej zmiennej i jej pierwszej pochodnej. Inne zasady przedstawiono podczas opisu zachowania si modeli układów, w rónych warunkach wymusze.
2. ZAŁOENIA DO BADA MODELI
Rzeczywiste układy mechaniczne to układy masowo – dyssypacyjno - spryste opisywane za pomoc przemieszcze, ich pochodnych zwizanych z odkształceniami oraz wywołujcymi je siłami. Wielkoci opisujce s ze sob sprzone, s zmienne w czasie i nazywane s w dynamice maszyn sygnałami. Sygnały przemieszcze, prdkoci i przyspiesze oraz działajcych sił maj charakter uogólniony, tzn. przemieszczenia s zarówno translacyjne jak i rotacyjne, a siły s skupione i pary sił s reprezentowane przez ich momenty. Równania ruchu, opisujce drgania dyskretnego modelu fizycznego, maj w ogólnym przypadku posta [33,64]:
0),,...,...,,,,...,,...,,,,...,,...,,,,...,,( 21
....
2
..
1
...
2
.
1
.
21 =tRRRRqqqqqqqqqqqF wininink gdzie: n - liczba stopni swobody, w – liczba wizów, t – czas, Rj – j-ta nieznana siła
uogólniona (reakcja), qi – i-te przemieszczenie, iq.
- i-ta prdko uogólniona, iq..
- i-te przypieszenie uogólnione. Przy modelowaniu dynamicznych własnoci układów mechanicznych stosuje si szereg uproszcze w zakresie opisu i zasad budowy modeli fenomenologicznych.
W celu modyfikacji własnoci dynamicznych układów mechanicznych buduje si modele strukturalne, które odzwierciedlaj organizacj wewntrzn i zachowuj własnoci transformacyjne układu.
Kady układ mechaniczny złoony jest z elementów: masowych (punkty materialne, nieodkształcalne lub odkształcalne bryły), sprystych (spryny) i tłumicych (np. tłumiki). Mówi si wic o układach m, k, c (masowo – dyssypacyjno - sprystych). Tylko w uproszczeniu mona mówi o modelu masowym, masowo-sprystym lub masowo-

dyssypacyjnym. Kady układ (model), posiadajcy własnoci spryste wytrcony z połoenia równowagi, bdzie realizował ruch przemienny wokół połoenia równowagi. Taki ruch nazywamy drganiami mechanicznymi.
Drgania mechaniczne w zalenoci od: liczby stopni swobody układu, równania (równa) opisujcego ruch, sposobu wytrcenia z połoenia równowagi (sposobu wymuszenia), modelu układu, charakteru sygnału przemieszcze i kierunku ruchu dzielimy na [14,33,71]: - drgania układów o jednym stopniu swobody, o wielu stopniach swobody - drgania układów dyskretnych: o nieskoczonej liczbie stopni swobody - drgania układów cigłych; - drgania liniowe; nieliniowe; - drgania autonomiczne (swobodne); nieautonomiczne (wymuszone: zewntrznie lub wewntrznie); - drgania zachowawcze (bez tłumienia); niezachowawcze (z dyssypacj energii; lub z tłumieniem); - drgania zdeterminowane; stochastyczne; - drgania wzdłune, poprzeczne, translacyjne, rotacyjne (gitne, skrtne), itp.
Kluczem do okrelenia dynamiki obiektów czyli drga obiektów mechanicznych jest zatem znajomo moliwych odpowiedzi układu dynamicznego, do którego mona zredukowa badany obiekt. 2.1 Drgania translacyjne i skrtne W praktycznych zastosowaniach na pocztku rozwaa modelowane obiekty bada przedstawiane s jako elementarne modele drgajce o jednym stopniu swobody. Przykłady takich układów z wymuszeniem siłowym lub momentowym przedstawiono na rys. 4.1 [a).model o wymuszeniu siłowym, b). model o wymuszeniu momentowym]. Czy wnioski płynce z analizy drga typu skrtnego s takie same jak dla drga typu translacyjnego?
Rys.4.1 Schematy modeli fizycznych o jednym stopniu swobody dla drga translacyjnych a). oraz dla drga skrtnych b).
Stosujc zasad d’Alemberta dla kadego z modeli otrzymuje si równania: model translacyjny a). model skrtny b). =+ 0bezwli FF =+ 0bezwlsili MM
.
..
0)( =−−− xmxckxtF 0)(...
=−−− ϕϕϕ ICKtM ostatecznie za:
)(...
tFkxxcxm =++ )(...
tMKCI =++ ϕϕϕ (4.1) Otrzymane równania, słuszne nie tylko dla układu o jednym stopniu swobody, s
identyczne, a wic wnioski płynce z analizy ich rozwiza bd równie identyczne.

2.2 Wymuszenie siłowe i kinematyczne Dla tej samej ogólnoci rozwaa rozpatrzmy wymuszenia siłowe i kinematyczne przedstawione na rys.4.2. W pierwszym przypadku wymuszenie pochodzi od zadanej zewntrznej siły bd momentu, za w drugim przypadku mamy zadany ruch na torze (wymuszenie kinematyczne) [14]. Oba przypadki wymuszenia s modelowo równowane, a zadane przemieszczenie z(t) działajc poprzez spryn k i tłumik c jest ródłem siły równowanej F(t), przy czym
.
)( zckztF += . Wiedzc o tym mona dalsze rozwaania ograniczy do drga translacyjnych z wymuszeniem siłowym, a wnioski przenosi na dowolny ruch z dowolnym typem wymuszenia.
Rys.4.2 Ilustracja równowanoci wymuszenia siłowego a). i kinematycznego b) [14]. 2.3 Wyznaczanie parametrów zastpczych
Podstawowe metody wyznaczania parametrów (cech) strukturalnych modeli układów mechanicznych to metody identyfikacji; prostej dla układów prostych i złoonej dla układów o wielu stopniach swobody.
W przypadku prostych układów mechanicznych, niekoniecznie o małej liczbie stopni swobody, ale z łatwym podziałem na dyskretne elementy masowe, spryste i tłumice najbardziej efektywna jest metoda analityczna oparta na znajomoci geometrii i własnoci materiałowych elementów konstrukcyjnych układu.
Metoda analityczna zawiera si w kilku etapach. Najpierw dokonuje si mylowej dyskretyzacji rzeczywistego układu mechanicznego. Łczy si elementy w grupy o zblionych cechach dominujcych, np. o wyranie przewaajcych cechach masowych nad sprystymi lub tłumicymi. Elementy masowe traktuje si wic jako nieodkształcalne bryły lub punkty materialne. Elementy bezmasowe ((spryste i tłumice) najczciej traktowane jednoczenie jako sprysto-tłumice s ujmowane jako odkształcalne. Tak połczone elementy w grupy przedstawia si tylko jednym elementem zwanym zastpczym lub zredukowanym. Jest on reprezentowany tylko jednym parametrem zredukowanym, bdcym albo wprost parametrem strukturalnym, albo elementem pewnej kombinacji parametrów zredukowanych.
Parametry zastpcze wyznacza si dla potrzeb analizy dynamiki układu, najczciej przy załoeniu równowanoci dynamicznej grupy elementów konstrukcyjnych i elementu zastpczego. Równowano dynamiczna oznacza równowano energii ruchu elementów układu rzeczywistego i elementów zastpczych, co oznacza ich równowano energii kinetycznej, potencjalnej i funkcji dyssypacji energii.

2.4 Wyznaczanie mas zastpczych Rzeczywiste elementy masowe s w ogólnoci bryłami nieodkształcalnymi, wic ich energia kinetyczna jest sum energii kinetycznej ruchu postpowego z prdkoci Vs rodka masy oraz energii kinetycznej ruchu obrotowego dookoła osi chwilowego obrotu, przechodzcej przez rodek masy.
22
21
21
iiiikz JVmE ω+= (4.2)
Zastpczymi elementami masowymi mog by albo punkty materialne, albo bryły doskonale sztywne. Zakłada si najczciej, e punkty materialne wykonuj ruch prostoliniowy, a bryły ruch obrotowy dookoła stałej osi. Dokonujc redukcji masy korbowodu mechanizmu korbowo-tłokowego (rys.4.3) do dwóch punktów A i B pokrywajcych si z osi sworznia wału korbowego O oraz z osi sworznia tłokowego przyjmuje si oznaczenia: - masa korbowodu mk, - długo korbowodu lk, - moment bezwładnoci Js wzgldem osi przechodzcej przez rodek masy S odległy od osi
A o a = A S oraz od osi B o b = B S, przy czym a + b = lk.
Rys.4.3 Schemat mechanizmu korbowo - tłokowego. Równowano dynamiczna energii zachodzi musi dla dowolnych wartoci Vs ruchu
postpowego oraz ω ruchu obrotowego, a wic równie dla ich szczególnych wartoci równych niejednoczenie zeru. Wynikaj std równania równowanoci mas oraz równowanoci momentów bezwładnoci wzgldem osi przechodzcej przez rodek masy S: BAk mmm += dla ω = 0 (4.3)
22 bmamJ BAS += dla VS = 0 (4.4) a std wartoci mas zastpczych mA i mB :
22
2
babmJ
m kSA −
−= (4.5)
22
2
abamJ
m kSB −
−= (4.6)
Warunek równowanoci statycznej oznacza równowano momentów statycznych układu rzeczywistego i zastpczego: 0=− bmam BA (4.7) Spełnienie jednoczenie trzech warunków równowanoci statycznej i dynamicznej wymaga zastpienia korbowodu trzema punktami materialnymi (A,S,B) i wówczas równania równowagi s nastpujce:
SBAk mmmm ++= 22 bmamJ BAS += (4.8)

0=− bmam BA Masy zastpcze w układzie tym przyjmuj posta:
;k
SA al
Jm = ;
k
SB bl
Jm =
abJ
mm SkS −= (4.9)
2.5 Zastpcze sztywnoci modelowanych układów Jeeli w układzie wystpuj róne elementy spryste, naley wówczas wyznaczy zastpczy współczynnik sprystoci. Mona tu rozway dwa przypadki połcze sprystych – połczenie równoległe i szeregowe. Zastpczy współczynnik sprystoci wyznacza si z warunku równowagi energii potencjalnych. Jak wynika z rys.4.4 energia potencjalna połczenia równoległego przy przesuniciu o x wynosi:
22
21 2
121
xkxkEP += (4.10)
Rys.4.4 Połczenia spryste: równoległe a). i szeregowe b). oraz sztywno zastpcza.
Energia potencjalna układu zastpczego przy tym samym przesuniciu wynosi:
2
21
xkE zP = (4.11)
Po porównaniu tak opisanych energii otrzymuje si dla połczenia równoległego:
21 kkzk += (4.12)
Dla połcze szeregowych nadajemy przesunicie x na kocu spryny o współczynniku k2. Spryna o współczynniku sprystoci k1 zostanie odkształcona o z i energia potencjalna obu spryn wynosi:
22
21 )(
21
21
zxkzkEP −+= (4.13)
Poniewa w punkcie A jest równowaga dwóch sił: k1z = k2(x-z) , mona wyznaczy:
xkk
kz
21
2
+= (4.14)
Po podstawieniu (4.14) do (4.13) i przekształceniu otrzymuje si:
2
21
21
21
xkk
kkEP +
= (4.15)
Porównujc dalej (4.10) i (4.15) otrzymuje si zastpczy współczynnik sprystoci dla połczenia szeregowego:
21
21
kkkk
k z += (4.16)
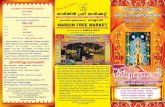
2.6 Oszacowanie zastpczego tłumienia obiektu Parametr ten jest niezbdny przy oszacowaniu amplitudy odpowiedzi rezonansowej modelu bd szybkoci zaniku drga. Do jego wyznaczenia naley z eksperymentu

wyznaczy logarytmiczny dekrement tłumienia ∆, bd stopie tłumienia ξ oraz czsto własn ω0, co czsto wykorzystuje si do weryfikacji modelu. Realizacja eksperymentu testem impulsowym, polegajcym na uderzeniowym wymuszeniu obiektu w punkcie spodziewanego działania wymuszenia i odbiorze odpowiedzi w punkcie redukcji R. Jako wynik uzyskuje si obraz drga zanikajcych, przedstawiony na rys.4.5.
ξΠ==∆ 2ln3
1
AA
∆=lnA1/A3=2Πξ Rys.4.5 Ilustracja do wyznaczenia logarytmicznego dekrementu tłumienia ∆ i zastpczego tłumienia cz.
Wynikiem eksperymentu jest tu logarytmiczny dekrement tłumienia ∆, bd stopie tłumienia ξ oraz czsto własna ω0, co słuy do weryfikacji oblicze i badanego modelu.
Drgania tłumione przedstawione na rys.4.5 s nieokresowe, jednak kolejne połoenia rodkowe i kolejne wychylenia s osigane po jednakowych odstpach czasu. Zatem, okres drga tłumionych mona wyznaczy z zalenoci:
22
0
1
22
nT
−==
ωπ
ωπ
(4.17)
który jest wikszy od okresu drga tłumionych:
0
01
2ω
π=TT (4.18)
Dekrement logarytmiczny tłumienia, definiowany jako stosunek wartoci dwóch kolejnych maksymalnych amplitud, przyjto za miar tłumienia drga:
11 )(
)(ln nT
Ttxtx =
+=∆ (4.19)
Stopie tłumienia dla ułatwienia dalszej analizy mona zapisa w postaci:
0ω
ξ hcc
kr
== oraz 1,2 === ξgdymkcc kr (4.20)
Dla rys. 4.5 mona napisa:
zz
z
zkr
z
kr km
ccc
cc
2===ξ (4.21)
W takim razie dekrement logarytmiczny tłumienia wynosi:
zz
z
zz
z
km
c
km
c πππξ ===∆2
22 (4.22)

a z tego tłumienie zastpcze:
zzz kmcπ∆= (4.23)
Znajc zatem z eksperymentu dekrement logarytmiczny tłumienia ∆ oraz z dalszych oblicze zastpcz mas i sztywno (mz, kz) mona wyznaczy warto zastpczego tłumienia cz w badanym modelu. 3. DRGANIA UKŁADÓW O JEDNYM STOPNIU SWOBODY
Drgania układu powstajce na skutek naruszenia połoenia równowagi układu mechanicznego, który nastpnie porusza si pod działaniem sił sprystych, cikoci lub tarcia nazywa si drganiami swobodnymi. W układach o jednym stopniu swobody naruszenie połoenia równowagi charakteryzuje si warunkami pocztkowymi: pocztkowym
połoeniem x0 i pocztkow prdkoci 0
*
x . 3.1 DRGANIA SWOBODNE
Drgania swobodne układu o jednym stopniu swobody mona przedstawi modelem jak na rys.4.6, bez uwzgldnienia siły zewntrznej P(t).
c = α Rys.4.6 Model układu o jednym stopniu swobody
Jako współrzdn uogólnion przyjmuje si przemieszczenie x masy m odniesione do
połoenia równowagi statycznej układu [8,13,17]. Drganiami wymuszonymi układu mechanicznego nazywa si takie drgania, które zachodz wskutek działania sił zewntrznych P(t) na układ. Równanie dynamiczne ruchu masy m otrzymuje si korzystajc z II zasady Newtona:
PGRSxm ++−−=**
(4.24) gdzie: P – siła wymuszajca, G – ciar masy układu, S – siła reakcji spryny, R – siła oporu tłumika.
Przy załoeniu, e odkształcenia spryny s niewielkie, mona przyj, e siła S jest liniow funkcj x: ][ stxkS δ+= (4.25) Współczynnik k nazywa si współczynnikiem sprystoci obcienia spryny do wywołanego przez nie ugicia [N/m]. Natomiast:
kG
st =δ (4.26)
oznacza ugicie statyczne spryny, wywołane ciarem G. Siła R moe przedstawia nie tylko opór tłumika specjalnie wprowadzonego układu,
ale równie siły tarcia w prowadnicach, opór orodka, w którym drga ciało, itp. Pozostajc na

gruncie układów liniowych, przyjmuje si, e siła oporu jest proporcjonalna do prdkoci ruchu ciała o masie m:
*
xcR = (4.27) Ten typ oporu nazywamy liniowym tłumieniem wiskotycznym (lepkim), współczynnik c nazywa si współczynnikiem tłumienia lepkiego i ma wymiar [kg/s] .
Za pomoc (4.27) mona wyrazi siły oporu tłumików olejowych lub sił tarcia w przypadku lizgania si po sobie czci dobrze smarowanych, czy te w czasie ruchu ciała w cieczy lub gazie przy załoeniu, e prdko v jest dostatecznie mała. Po podstawieniu (4.25) i (4.27) do (4.24) otrzymuje si:
kGtPkxxcxm stδ−+=++ )(***
(4.28) Jeeli teraz uwzgldnimy zaleno (4.26), otrzymamy poszukiwane równanie drga w postaci:
)(***
tPkxxcxm =++ (4.29) Drgania swobodne nie tłumione
Przyczyna ruchu obiektu, a wic i modelu wynika tu z zadanych warunków pocztkowych. Przyjmujc w (4.29) c = 0 i P(t) = 0, otrzymuje si równanie drga swobodnych układu zachowawczego (układu, w którym obowizuje zasada zachowania energii) w postaci:
0**
=+ kxxm (4.30) Dzielc obie strony (4.30) przez m, otrzymuje si:
020
**
=+ xx ω (4.31)
gdzie: mk=0ω nazywane jest czstoci drga własnych.
Rozwizanie ogólne równania (4.31) ma posta: tCtCx 0201 sincos ωω += (4.32) Równanie to zawiera dwie stałe dowolne C1, C2, które wyznacza si z warunków
pocztkowych. Przyjmujc, e w chwili t = 0, x = x0 oraz 0
**
xx = , wówczas:
01 xC = , 0
0
*
2 ωx
C = (4.33)
oraz
tx
txx 00
0
*
00 sinsin ωω
ω += (4.34)
Drgania swobodne (4.34) mona równie zapisa w postaci przemieszczenia drga: )sin( 0 ϕω += tAx (4.35)
gdzie:
2
0
0
*
20
+=
ωx
xA , 0
*00tg
x
x ωϕ = (4.36)
Ze wzorów (4.35) i (4.36) wynika, e drgania swobodne liniowego układu zachowawczego maj posta drga harmonicznych o amplitudzie A i kcie przesunicia fazowego ϕ , zalenego od warunków pocztkowych. Czstoci za drga własnych 0ω i okres drga

00
2ω
π=T zale wyłcznie od masy i sprystoci układu.
Róniczkujc równanie (4.35) otrzymuje si prdko drga:
)cos( 00
*
ϕωω += tAx (4.37) bdc równie okresow funkcj czasu o tym samym okresie co przesunicie. Z kolei róniczkujc prdko otrzymuje si warto przyspieszenia drga:
xtAx 200
20
**
)sin( ωϕωω −=+−= (4.38) Jest ono okresow funkcj czasu o tym samym okresie co przesunicie i prdko. Przypieszenie jest proporcjonalne do przesunicia i jest skierowane przeciwnie do przesunicia (4.38), czyli jest stale skierowane do połoenia równowagi [33,71]. Równanie (4.38) mona napisa w postaci:
020
**
=+ xx ω (4.39) i jest ono równaniem drga harmonicznych albo równaniem drga oscylatora harmonicznego. Wynika z niego, e drgania własne układu o jednym stopniu swobody s w zupełnoci okrelone przez czsto drga własnych. Amplituda drga zaley od warunków pocztkowych (patrz 4.36), natomiast czstoci własne i okres drga od nich nie zale.
Drgania swobodne tłumione Równanie drga swobodnych tłumionych otrzymuje si, przyjmujc we wzorze (4.29)
P(t)=0:
0***
=++ kxxcxm (4.40) lub po podzieleniu przez mas w postaci:
02 20
***
=++ xxhx ω (4.41)
gdzie: ,2mc
h = mk=2
0ω .
Rozwizaniem tego równania jest posta: rtAex = , a równanie charakterystyczne dla (4.41) ma posta: 02 2
02 =++ ωhrr (4.42)
Ogólne rozwizanie tego równania zaley od wartoci i znaku wyrónika, który ma znan posta: )(4 2
02 ω−=∆ h
Std: 20
22,1 ω−+−= hhr
trtr eAeAtx 2121)( += (4.43)
Analizujc pierwiastki charakterystyczne r1,2 zauwaa si, e wyznaczaj one trzy obszary zachowania si modelu, zalenie od wartoci współczynnika tłumienia h: 0ωh ; 0ω=h ; 0ωh . (4.44)
Wprowadzajc bezwymiarowy stopie tłumienia ξ , który spełnia relacje:
0ω
ξ hcc
kr
== ; mkcc kr 2== ; gdy 1=ξ (4.45)
wida, e krytyczna warto tłumienia zaley od masy i sprystoci. Wskazane trzy wartoci tłumienia (4.44) charakteryzuj tłumienie nadkrytyczne, krytyczne i podkrytyczne, dla których mona przypisa nastpujce rozwizania:

- tłumienie nadkrytyczne:
krcc , )1( ξ ; tt eAeAx 0
20
2 )1(2
)1(1
ωξξωξξ −−−−+− +=
- tłumienie krytyczne: krcc = , )1( =ξ ; tetAAx 0)( 21
ξω−+= (4.46) - tłumienie podkrytyczne:
krcc , )1( ξ ; tii eAeAx 02
02 )1(
2)1(
1ωξξωξξ −−−−−− +=
- okres drga tłumionych: 22
001
22
hT
−==
ωπ
ωπ
jest wikszy od okresu drga nie
tłumionych: 0
012ω
π=TT ;
- logarytmiczny dekrement tłumienia (jako stosunek dwu kolejnych amplitud) umoliwiajcy eksperymentalne okrelanie współczynnika tłumienia wyznacza si z
zalenoci: 11)(
)(ln hT
Ttxtx =
+=δ .
W zastosowaniach technicznych z tłumieniem nadkrytycznym mamy do czynienia w konstrukcji rónego rodzaju indykatorów wskazówkowych, za z tłumieniem podkrytycznym w układach amortyzacji. Materiały konstrukcyjne cechuj si bardzo małym stopniem tłumienia 1ξ co objawia si słabym zanikiem drga w konstruowanych układach. 3.2 DRGANIA WYMUSZONE
Moliwy charakter wymusze w funkcji czasu, które mog wystpowa w realnych przypadkach obcie dynamicznych układów sprystych mona podzieli na: procesy zdeterminowane, gdzie nastpstwo wartoci siły w czasie jest cile okrelone jedn funkcj p(t) = f(t) oraz procesy przypadkowe, gdzie opis wymuszenia ujmuje cały zbiór oddzielnych realizacji p(t) = fi(t). Dokładniejszy podział na klasy zwizane z rodzajem opisu procesów wymuszajcych i wskazaniem moliwoci ich zastosowa przedstawiono w rozdziale VII.
Drgania wymuszone to drgania powstajce wtedy, gdy punkt drgajcy w orodku o stałej tłumienia poddany jest dodatkowo działaniu siły sinusoidalnie zmiennej z biegiem czasu. Drgania odbywane w warunkach rzeczywistych, w dowolnym orodku materialnym, zawsze s połczone z przekazywaniem energii otoczeniu w zwizku z pokonywaniem sił oporu. W wyniku wykonywanej pracy energia ciała drgajcego maleje, zmniejsza si te amplituda drga.
Drgania nie podtrzymywane sił zewntrzn ulegaj tłumieniu, gasn, zanikaj — std ich nazwy: drgania tłumione, gasnce, zanikajce.
W orodkach o wikszych stałych tłumieniach (o wikszych dekrementach logarytmicznych tłumienia) wygaszanie drga jest gwałtowniejsze. Teoretycznie spadek amplitudy A do zera powinien nastpi dopiero po czasie t = to w praktyce ju po czasie skoczonym obserwuje si faktyczny zanik drga. Warto podkreli, e badanie drga tłumionych w okrelonym orodku pozwala wyznaczy jego współczynnik oporu. 3.2.1 Drgania wymuszone nietłumione Opis drga wymuszonych nietłumionych uzyskuje si, przyjmujc w (4.29) c=0 i P(t)=cosωt, w postaci:

tPkxxm ωcos0
**
=+ (4.47)
albo: tqxx ωω cos2**
=+ , gdzie: mk=2ω ,
mP
q 0= .
Równanie to jest równaniem róniczkowym liniowym niejednorodnym. Jego rozwizanie ogólne jest równe sumie rozwizania ogólnego x1 odpowiedniego równania jednorodnego (4.30) oraz rozwizania szczególnego x2: 21 xxx += (4.48) przy czym: tCtCx 02011 sincos ωω += . Rozwizania szczególnego równania (4.47) szukamy w postaci: tAx ωcos2 = (4.49) gdzie A jest stałym współczynnikiem, którego warto naley wyznaczy. Podstawiajc do wyraenia (4.47) wyraenie (4.49) otrzymuje si: 0cos])([ 22
0 =−− tqA ωωω (4.50) Aby powysze równanie było spełnione, winno by:
0)( 220 =−− qA ωω , czyli 22
0 ωω −= q
A , co po podstawieniu do (4.49) daje:
tq
x ωωω
cos220
2 −= (4.51)
Uwzgldniajc zalenoci (4.51) i (4.48) otrzymujemy zatem:
tq
tCtCx ωωω
ωω cossincos 220
0201 −++= (4.52)
Ruch punktu materialnego stanowi wic wynik superpozycji dwóch rodzajów ruchu drga harmonicznych. Pierwsze z nich pokrywaj si z badanymi wczeniej drganiami swobodnymi, drugie za odpowiadaj szczególnemu rozwizaniu (4.51). Te ostatnie drgania nosz nazw drga wymuszonych, a ich okres jest taki sam jak okres siły P wywołujcej te drgania: T=2π/ω. Amplituda drga wymuszonych wynosi wic [33]:
20
2
20
220 1
1
1
1
ωω
δ
ωωω
−=
−= st
qA (4.53)
gdzie: kP
st0=δ jest wychyleniem statycznym.
Gdy 0=ω , czyli gdy siła wymuszajca jest stała, otrzymujemy:kP
x st0
2 == δ , układ
wykonuje drgania swobodne, których rodkiem jest połoenie równowagi układu.
Gdy ∞→0ω
ω, to amplituda drga wymuszonych ∞→A . Gdy 1
0
→ωω
, tzn. gdy czsto
siły wymuszonej zblia si do czstoci własnej, amplituda ∞→A . Przypadek ten nosi nazw rezonansu i polega na zwielokrotnieniu amplitudy drga w porównaniu z ugiciem statycznym.
Rezonans jest zjawiskiem zachodzcym w układach drganiowych, gdy czstotliwo drga wymuszajcych ω jest równa lub bliska czstotliwoci drga własnych ω0. Rezonans polega na szybkim wzrocie amplitudy drga układu fizycznego, tym wikszym im mniejsze jest tłumienie drga w układzie. Charakterystyk rezonansow układu przedstawia krzywa

rezonansowa. Im szersza jest krzywa rezonansowa, tym łatwiej jest pobudzi układ drganiowy do drga wymuszonych - układ jest mniej selektywny. Powstaj w nim drgania ju przy czstotliwociach drga wymuszajcych, znacznie rónicych si od czstotliwoci rezonansowej. W miar zbliania si czstotliwoci drga wymuszajcych do czstotliwoci drga własnych układu, amplituda drga wymuszonych ronie i osiga maksymaln warto, gdy: ω = ωr.
Skoczona warto amplitudy drga rezonansowych wynika std, e w układach rzeczywistych cz energii zostaje stracona - układ jest dyssypatywny [14,33,71]. Drgania wymuszone tłumione Rozwaajc drgania układu mechanicznego z rys.1 w przypadku gdy tPtP ωsin)( 0= , mona napisa równanie drga wymuszonych tłumionych:
tPkxxcxm ωsin0
***
=++ (4.54)
Przyjmujc, e tłumienie jest podkrytyczne [ )1ξ zastosowania praktyczne] albo mkc równanie powysze po podzieleniu przez mas mona przedstawi w postaci:
tqxxhx ωω sin2 20
***
=++ (4.55)
Rozwizanie tego równania przy warunkach pocztkowych: 0,0,0*
=== xxt mona przedstawi w postaci: )sin()sin( 11 ϕωω −+−−= − tAvteAx ht (4.56) gdzie:
22222
0
14)(
11 ωωωω
h
qA
+−= , 222
1
12tg
ωωω
−−=
hh
v (4.57)
22222
0 4)( ωωω h
qA
+−= , 22
0
2tg
ωωωϕ
−= h
(4.58)
We wzorze (4.56) pierwszy składnik przedstawia drgania swobodne tłumione, powstałe na skutek przyłoenia siły wymuszajcej przy zerowych warunkach pocztkowych. Drugi składnik przedstawia natomiast drgania ustalone wymuszone. Po pewnym czasie drgania swobodne zostaj wytłumione i mona je pomin. Pozostaj drgania wymuszone majce posta drga harmonicznych o czstoci siły wymuszajcej : )sin( ϕω −= tAx . Drgania te s opónione w fazie w stosunku do obcienia o kt ϕ wyznaczony z drugiego wzoru (4.58). Drgania liniowe układu (o jss) przy wymuszeniu harmonicznym Jeeli układ mechaniczny posiada tylko jeden stopie swobody i posiada liniowe charakterystyki sprystoci i tłumienia (rys.4.7), a działa na niego harmoniczna siła wymuszajca, to równanie jego ruchu jest:
)t(HCqqBqA =++ , (4.59)
q – współrzdna uogólniona (przemieszczenie translacyjne x[m], rotacyjne ), A – m – masa [kg]; I masowy moment bezwładnoci [kgm2], B – b - współczynnik tłumienia translacyjnego [Ns/m];
b0 - współczynnik tłumienia rotacyjnego Nms/rad], C – c – współczynnik sztywnoci translacyjnej [N/m];
c0 – współczynnik sztywnoci rotacyjnej [Nm/rad], H(t) – F(t) – siła wymuszajca [N];
M(t) – moment wymuszajcy [Nm].

Rys.4.7 Modele układów o jednym stopniu swobody Drgania autonomiczne (swobodne) Jeeli na układ wstpnie wyprowadzony z połoenia równowagi nie działaj adne wymuszenia [H(t)=0], to otrzymujemy nastpujce równanie:
0CqqBqA =++ , (4.60)
Jest to równanie drga swobodnych tłumionych. Jeeli pominiemy tłumienie , to równanie ulegnie dalszemu uproszczeniu:
0CqqA =++ , (4.61)
Rozwizaniem ogólnym powyszego równania jest funkcja sygnału harmonicznego: ( ) ( )ϕ+ω= tsinqtq 00 (4.62)
0 – czsto kołowa sygnału [rad/s]; - faza sygnału harmonicznego [rad]. Po podstawieniu otrzymamy:
( ) ( ) 0tsinqAC 0020 =ϕ+ωω− (4.63)
która to zaleno, jest spełniona dla dowolnej chwili czasowej t tylko wtedy, gdy:
AC
AC ==− 020 stt 0 ωω (4.64)
Jest to czsto kołowa nie tłumionych drga własnych, nazywana czstoci własn układu. Okres drga własnych jest równy:
AC
22
T0
0 π=ω
π= (4.65)
Ogólne rozwizanie ma posta:
( )
ϕ+= t
CA
sinqtq 0 (4.66)
gdzie amplituda drga q0 i faza , s stałymi całkowania, zalenymi od warunków pocztkowych ruchu. Jeeli wystpuje tłumienie wiskotyczne (B0), to równanie drga (4.60) w wyniku podzielenia obustronnie przez współczynnik bezwładnoci A przyjmie nastpujc posta:
0qqh2q 20 =ω++ (4.67)
gdzie:
[ ]rad/s A2
Bh = (4.68)
jest jednostkowym współczynnikiem tłumienia wiskotycznego, natomiast
[ ]rad/s AC
0 =ω (4.69)
jest czstoci własn układu.

4. DRGANIA UKŁADÓW O DWÓCH STOPNIACH SWOBODY W wielu przypadkach analizy dynamicznej obiektów mechanicznych zamiast jednego
stopnia swobody trzeba uwzgldni kilka stopni swobody ruchu drgajcego. Dotyczy to szczególnie obiektów o konstrukcji niejednorodnej z gwałtown zmian własnoci masowo – sprysto – dyssypacyjnych, np. podwieszenie do belki ciaru na linie, wstawienie podatnego sprzgła w linii napdowej agregatu maszynowego czy podparcie bryły sztywnej sprynami i tłumikami w wielu płaszczyznach. Najmniejsz komplikacj wyrónia si tu model o dwóch stopniach swobody, na którego przykładzie mona wyjani wikszo cech szczególnych układów o wielu stopniach swobody [14,33,57].
Opis obiektu o dwóch stopniach swobody (rys.4.8) jest nieco trudniejszy, chocia efekt kocowy jest podobny [64].
UKŁAD O 2 SSW
Rys.4.8 Model układu o dwóch stopniach swobody Po uwolnieniu z wizów kadego elementu, otrzymuje si nastpujce układy sił działajcych na te elementy:
( ) ( ) ( )( ) ( ) ( ). , , :
;c- ,b- , , , :
1221222
11111221221
qqcqqbtPII
qqqqcqqbtPI
−−−−
(4.70)
Stosujc zasad d’Alemberta dla kadego z tych elementów, moemy zapisa dwa
równania:
( ) ( ) ( )
( ) ( ) ( )tPqqcqqbqm
tPqqcqqbqcqbqm
212212222
1122122111111
+−−−−=+−+−+−−=
(4.71)
Wprowadzajc pewne uporzdkowanie powyszych równa, otrzymamy układ róniczkowy równa ruchu:
( ) ( ) ( )( )tPqcqcqbqbqm
tPqcqccqbqbbqm
21222122222
1221212212111
=−+−+=−++−++
(4.72)
Stosujc prawa rachunku macierzowego, równanie ruchu (4.70) mona zapisa: ( ) ( ) ( )
( )tP
tP
q
q
cc
ccc
q
q
bb
bbb
q
q
m
m
2
1
2
1
22
221
2
1
22
221
2
1
2
1
00
=−
−++
−−+
+
(4.73)
lub ogólnie: QCqqBqA =++
(4.74)
Jak wida, mimo wielu załoe w czasie modelowania układu wystpujce tu równania ruchu układu s nieliniowe i ich rozwizanie nie jest proste. Mona to wykona

analitycznie, poprzez rónego typu linearyzacj członów nieliniowych, numerycznie całkujc krok po kroku metod rónic skoczonych, albo numerycznie na modelu analogowym.
Charakterystyczne wartoci opisu układu: czstoci własne i postacie drga, czsto trudne do wyznaczenia analitycznego mona okreli w drodze identyfikacji złoonej w czasie eksperymentu, co zostanie omówione w dalszej czci opracowania.
5. DRGANIA UKŁADÓW O SKOCZONEJ LICZBIE STOPNI SWOBODY
Układy drgajce mona umownie podzieli na dwa podzbiory: układy dyskretne i
układy cigłe. Umowno podziału wynika z tego, e układy drgajce s przestrzennymi elementami zbudowanymi z materiałów odkształcalnych, s wic układami cigłymi o nieskoczonej liczbie stopni swobody. Dla celów praktycznych wiele układów fizycznych mona jednak uwaa za dyskretne. W praktyce decyzja, czy dany układ potraktowa jako dyskretny, czy jako cigły zaley od argumentów uzasadniajcych z jednej strony dokładno wyników oblicze, a z drugiej korzy uzyskania wyników oblicze wynikajca z dyskretyzacji rozpatrywanego układu [33,57].
Układ dyskretny jest takim układem, którego równania ruchu mona wyrazi za pomoc zbioru równa róniczkowych zwyczajnych dla skoczonej liczby poszukiwanych funkcji jednej zmiennej rzeczywistej - czasu.
W analizie dynamicznej układów dyskretnych dla przypadku małych drga posługujemy si trzema rodzajami współrzdnych. Współrzdne zewntrzne (np. kartezjaskie) słuce do opisu konfiguracji układu drgajcego w połoeniu równowagi statycznej. Współrzdne lokalne, które s funkcjami czasu i opisuj przemieszczenia elementów masowych układu drgajcego z połoenia równowagi statycznej. Współrzdne uogólnione Lagrange’a, które s take funkcjami czasu, s zbiorem niezalenych wielkoci geometrycznych, za pomoc których mona okreli wszystkie przemieszczenia lokalne.
Liczba współrzdnych uogólnionych nie moe by mniejsza od liczby dynamicznych stopni swobody. Czsto liczb współrzdnych uogólnionych przyjmuje si równ liczbie dynamicznych stopni swobody. Jest to przypadek tzw. bazy minimalnej [8,14,33,57,71].
W przypadku małych drga współrzdne lokalne s liniow transformacj współ-rzdnych uogólnionych, przy czym współczynniki transformacji zale wyłcznie od konfiguracji układu dynamicznego.
Układ o skoczonej liczbie stopni swobody przedstawiany jest jako zbiór punktów materialnych połczonych bezmasowymi sprynami i tłumikami. Rozwaane układy liniowe w praktyce inynierskiej to najczciej takie, w których siły spryste i tłumienia s liniowymi funkcjami przemieszcze i prdkoci punktów materialnych. S to układy holonomiczne, a liczba stopni swobody równa si liczbie współrzdnych uogólnionych. Współrzdne uogólnione s przesuniciami lub ktami obrotu mas. Drgania swobodne nietłumione
Najbardziej ogóln postaci równa róniczkowych ruchu s równania Lagrange'a drugiego rodzaju. Ruch układu holonomicznego, skleronomicznego o n stopniach swobody, opisany we współrzdnych uogólnionych za pomoc tych równa, ma posta:
jj
j
QqE
q
Edtd =
∂∂−
∂
∂*
(4.75)
gdzie: E - energia kinetyczna układu, Qj - zewntrzna siła uogólniona odpowiadajca

współrzdnej qj, skierowana zgodnie z dodatnim zwrotem tej współrzdnej. Energia kinetyczna rozpatrywanego układu ma posta kwadratowej formy prdkoci
uogólnionych:
=
=n
jijiij qqaE
1,
**
21
),...,2,1,( nji = (4.76)
Liczby aij = aji nazywaj si w s p ó ł c z y n n i k a m i b e z w ł a d n o c i układu. W przypadku drga swobodnych układów sprystych bez tłumienia siły uogólnione Qj wyraaj si poprzez energi potencjaln układu:
j
j qV
Q∂∂−= ),...,2,1( nj = (4.77)
przy czym energia potencjalna układu jest dodatnio okrelon form kwadratow współrzdnych uogólnionych ze stałymi współczynnikami:
=
=n
jijiij qqcV
1,21
),...,2,1,( nji = (4.78)
gdzie liczby cij = cji nazywaj si współczynnikami sprystoci:
jiji
ij cqqV
c =
∂∂=
2
(4.79)
Energia potencjalna jest funkcj współrzdnych uogólnionych, ale mona przyj, e w połoeniu równowagi jest równa zeru. Podobnie w połoeniu równowagi s równe zeru uogólnione siły sprystoci, co pozwala po podstawieniach (4.77) i (4.78) do (4.75) uzyska równania róniczkowe ruchu w postaci:
nnnn qcqcqcqaqaqa 1212111
**
12
**
121
**
11 ...... −−−−=+++
nnnn qcqcqcqaqaqa 2222121
**
22
**
221
**
21 ...... −−−−=+++ (4.80) ......................................................................................
nnnnnnnnnn qcqcqcqaqaqa −−−−=+++ ...... 2211
**
2
**
21
**
1 Wprowadzajc dalej zdefiniowane energie w postaci :
=
=n
jjj qaE
1
2*
21
oraz =
=n
jijiij qqcV
1,21
(4.81)
to układ przechodzi w układ równa róniczkowych rozprzonych wzgldem uogólnionych przyspiesze:
nnqcqcqcqa 12121111
**
1 ... −−−−=
nnqcqcqcqa 22221212
**
2 ... −−−−= (4.82) ....................................................
nnnnnnn qcqcqcqa −−−−= ...2211
**
Jest to prosta posta równa róniczkowych ruchu. Z kolei jeeli do sumy kwadratów doprowadzi si energi potencjaln:
=
=n
jijiij qqaE
1,
**
21
oraz =
=n
jjj qcV
1
2
21
(4.83)

wówczas układ przechodzi w układ równa róniczkowych rozprzonych wzgldem współrzdnych uogólnionych:
nn qaqaqaqc**
12
**
121
**
1111 ... −−−−=
nn qaqaqaqc**
22
**
221
**
2122 ... −−−−= (4.84) .......................................................
nnnnnnn qaqaqaqc**
2
**
21
**
1 ... −−−−= i nazywa si odwrotn postaci równa ruchu.
Do prostej postaci równa ruchu mona doj, korzystajc bezporednio z drugiego prawa Newtona dla wydzielonych z układu punktów materialnych, wyraajc siły sprystoci przez przemieszczenia:
01
**
=+=
n
jiijii yrym (4.85)
gdzie: im - i-ta skupiona masa; iy - przemieszczenie masy; ijr - jednostkowa reakcja układu. Jeli oprócz mas skupionych układ mechaniczny ma take ciała sztywne, to kty
obrotu tych ciał mona oznaczy przez yi, a przez mi rozumie si momenty bezwładnoci wzgldem osi, wokół których zachodz obroty. Sumy znajdujce si w kadym z równa (4.85) przedstawiaj wzite z przeciwnym znakiem siły działajce na kad z mas [8,13]. 5.1 Drgania własne nietłumione (Zagadnienie własne)
Zagadnienie własne, dotyczce drga swobodnych nietłumionych, opisuje ruch układu dynamicznego bez sił wymuszajcych i bez uwzgldnienia tłumienia. Ruch jest spowodowany warunkami pocztkowymi, tj. nadaniem układowi pocztkowego przemieszczenia lub pocztkowej prdkoci.
Problematyk zagadnienia własnego podzielono nastpujce czci: a). analiz czstoci własnych i wektorów własnych - te wielkoci graj główn rol w okrelaniu reakcji dynamicznej liniowych układów poddanych działaniu sił wymuszajcych, b). okrelenie właciwoci powyszych poj, c). rozwizania zagadnienia własnego. Analiza czstoci własnych i wektorów własnych Równanie ruchu drga własnych otrzymuje si z równania ruchu (4.74) po pominiciu członu zawierajcego macierz tłumienia oraz wektor obcie zewntrznych. Wówczas otrzymuje si:
0**
=+ KqqB (4.86) gdzie: 0 jest wektorem zerowym. Warunki pocztkowe, po których nastpuje ruch układu, s nastpujce:
0)0( qq = oraz 0
**
)0( qq = (4.87) Rozwizanie dla zadanego zagadnienia pocztkowego (4.86) i (4.87) polega na
podaniu warunków, dla których jest moliwy ruch rozpatrywanego układu. Przez analogi z układem o jednym stopniu swobody załoymy, e drgania własne s ruchem harmonicznym i rozwizania równania (4.86) poszukujemy w postaci funkcji harmonicznych o czstoci ω i fazie pocztkowej ϕ, czyli:
)sin()( ϕω +=→
tqtq (4.88)

gdzie: →q jest wektorem amplitud drga własnych, który reprezentuje kształt przemieszcze
elementów masowych układu w kierunku współrzdnych uogólnionych, czyli kształt postaci drga.
Po podstawieniu wyraenia (4.88) i jego drugiej pochodnej do równania ruchu (4.86) otrzymuje si:
0)sin()( 2 =++−→
ϕωω tqKB (4.89) Poniewa równanie to powinno by spełnione dla dowolnej chwili t, otrzymamy nastpujcy
układ równa algebraicznych, w którym wystpuje nieznany wektor →q oraz nieznana czsto
kołowa ω :
0)( 2 =−→qBK ω (4.90)
Jest to układ liniowych jednorodnych równa algebraicznych, który ma rozwizania niezerowe tylko wówczas, gdy: 0)det( 2 =− BK ω (4.91)
Po rozwiniciu tego wyznacznika otrzymuje si wielomian n-tego stopnia wzgldem 2ω (dla układu majcego n dynamicznych stopni swobody). Równanie to nazywa si równaniem charakterystycznym zagadnienia własnego lub równaniem czstoci. Pierwiastkami równania (4.91) s czstoci kołowe drga własnych: nωωω ,...,, 21 , (n=d).
Wród pierwiastków mog wystpi pierwiastki wielokrotne, wektor utworzony ze zbioru czstoci uporzdkowanych w kolejnoci wartoci rosncych nazywa si wektorem czstoci, a pierwsz czsto ω1 nazywa si czstoci podstawow: ],...,,[ 21 nωωωω = .
Mona dowie, e dla symetrycznych i dodatnio okrelonych macierzy bezwładnoci i macierzy sztywnoci o wartociach rzeczywistych, wartoci liczbowe wektora ω s rzeczywiste i dodatnie.
Kadej czstoci ωi odpowiada takie rozwizanie iwq =→
, e :
0)( 2 =− ii wBK ω (4.92) Wektor wi nazywa si i-tym wektorem własnym lub i-t postaci drga własnych. Okrela on z dokładnoci do stałego czynnika rozkład przemieszcze na kierunkach współrzdnych uogólnionych podczas drga z czstoci ωi. Opisuje wic odkształcon posta układu dynamicznego drgajcego z dan czstoci drga własnych. Zbiór wektorów własnych ωi tworzy macierz własn W:
==
nnnn
n
n
n
www
www
www
wwwW
,...,,
........................
,...,,
,...,,
],...,,[
21
22221
11211
21 (4.93)
Rozwizanie drga własnych układu dyskretnego opisanego równaniem ruchu (4.86) lub (4.92) jest kombinacj liniow drga harmonicznych o czstociach kołowych ωi i amplitudach proporcjonalnych do wektorów wi , czyli: +=+=
icsiciisii qtqtWtqtqwtq ωωωω cossin)cossin()( (4.94)
gdzie: )(cossin tdiagt iωω = ; Tcncci qqqq ],...,,[ 21= .
Elementy wektorów qs oraz qc s dowolnym stałymi, które mona wyznaczy warunków pocztkowych (4.87).

Naley podkreli, e głównymi zagadnieniami analizy drga własnych dla danego układu dynamicznego s [8,13]: - obliczenia wektora czstoci drga własnych; - obliczenia macierzy własnej W (zbioru wektorów własnych); - analiza ruchu mas układu dla zadanych warunków pocztkowych.
Macierz własna W została zdefiniowana jako uporzdkowany zbiór wektorów własnych i zapisana została zalenoci (4.93). Macierz widmow ΩΩΩΩ definiuje si jako macierz diagonaln, gdzie na głównej przektnej znajduj si kwadraty czstoci własnych:
==Ω
n
n
w
diag
2
22
12
22
21
2
.........................
........................
..........
,
],...,,(ω
ω
ωωω (4.94)
Kada czsto własna i kady wektor własny spełniaj nastpujc zaleno (uogólnion do poj macierzy własnej W i macierzy widmowej ΩΩΩΩ macierzow: Ω= BWKW (4.95) która w zwartej formie przedstawia relacj wszystkich wartoci i wektorów własnych.
Mona stwierdzi, e wektory własne s nie tylko ortogonalne, ale take normalizowane z wag macierzy bezwładnoci. Rozwizanie zagadnienia własnego
Okrelenie właciwoci układu drgajcego, tj. macierzy widmowej ΩΩΩΩ i macierzy własnej W lub tylko ograniczonej liczby ich pierwszych elementów, wymaga rozwizania zagadnienia własnego (4.90), które dla wygody dalszych rozwaa mona napisa w nastpujcej postaci: BwKw λ= (4.96) gdzie: K - jest macierz sztywnoci; B - macierz bezwładnoci układu drgajcego o n dynamicznych stopniach swobody; za 2ωλ = . Istnieje n wartoci własnych iλ (rad2 / s2) i
odpowiada im n wektorów własnych w spełniajcych równanie (4.96). Wielkoci iλ i wi
tworz n par własnych ( iλ ,wi), i = 1, 2,...,n, gdzie wartoci własne mog by uporzdkowane w nastpujcy sposób: nn λλλλ ≤≤≤≤≤ −121 ...0 (4.97)
Wartoci własne iλ s pierwiastkami równania charakterystycznego (4.91), tj.: 0)det()( =−= BKf λλ (4.98) gdzie: f(λ) jest wielomianem n-tego stopnia. Jeli n jest du liczb (np. kilka tysicy lub wicej), to dymy do okrelenia pierwszych (najniszych) p czstoci własnych i odpowiadajcych im p wektorów własnych.
W dynamice maszyn macierz sztywnoci K jest zawsze dodatnio okrelona, a w sformułowaniach metody elementów skoczonych jest czsto macierz pasmow. Natomiast macierz B moe mie róne właciwoci - moe by macierz pełn lub pasmow i wówczas jest zawsze dodatnio okrelona. Moe by jednak równie macierz diagonaln, której niektóre elementy mog by równe zeru. Wówczas macierz B jest macierz pół dodatnio okrelon. Jeli elementy na jej głównej przektnej s wiksze od zera, to macierz B jest dodatnio okrelona.
Tworzenie niezawodnych i efektywnych metod rozwizania zagadnienia własnego było przedmiotem wielu prac naukowych - szczególnie po upowszechnieniu komputerów. S to głównie metody numeryczne - iteracyjne, których obliczenia s zakoczone wówczas, gdy

uzyska si rozwizanie z zadan dokładnoci. Metody te mona podzieli na główne trzy grupy: metody iteracji wektora, metody transformacyjne, techniki iteracyjne wielomianu równania charakterystycznego.
Uzasadnienie, e metody rozwizywania zagadnienia własnego maj charakter iteracyjny wynika std, e naley znale pierwiastki wielomianu równania charakterystycznego f(λ), (4.98). Nie istniej jednak jawne zalenoci na obliczenie tych pierwiastków w przypadkach, kiedy stopie wielomianu jest wikszy ni 4, czyli dla n > 4 konieczne jest zastosowanie procesu iteracyjnego. Dla okrelenia pary własnej ( iλ ,wi), jeli jeden człon jest obliczony iteracyjnie, drugi moe by obliczony bez iteracji.
Dotychczas przedstawiono wiele algorytmów, kombinacji dwóch lub wicej metod do rozwizania zagadnienia własnego duych systemów. Szczegółowe omówienie tych metod podaj specjalistyczne opracowania [8,13,17]. Przykład [8,13]. Wyznaczy macierzowe równanie ruchu i rozwiza zagadnienie własne modelu obliczeniowego przedstawionego na rys.4.9. Elementy pionowe s osiowo nieodkształcalne, moliwy jest wic tylko ruch poziomy obu mas. Rozwizanie. Układ ma dwa stopnie swobody. Do opisu ruchu przyjto dwie współrzdne uogólnione q1 i q2. Bilans energetyczny prowadzi do nastpujcych wyników:
Rys.4.9 Model układu dynamicznego o dwóch stopniach swobody - energia kinetyczna:
)2(21
)(21 2
2
*2
1
*2
2
*
2
2
1
*
1 qmqmqmqmEk +=+=
- energia potencjalna:
]23[
21
]2)[(21
])([21
2221
21
222212
2121
2122
211
kqqkqkq
qkqqkqkkqqkqkE p
+−=
=+−+=−+=
- praca sił wymuszajcych: 2211 )()( qtFqtFL += Wstawiajc powysze wyraenia do równa Lagrange’a otrzymuje si macierzowe równanie ruchu w postaci:

=
−−
+
)(
)(30
02
2
1
2
1
2
**
**
1
tF
tF
q
q
kk
kk
q
q
m
m
Równanie charakterystyczne zagadnienia własnego przyjmuje wic posta: 0352)( 222 =+−= kkmmf λλλ którego rozwizanie s dwa pierwiastki: mk /5,01 =λ oraz mk /0,22 =λ . Wektor czstoci ma nastpujce wartoci:
sradmk
mk/
42
/0,2
/5,0
2
1
=
=
=
ππ
ωω
ω
Okresy drga własnych dla poszczególnych czstoci s równe: sT 0,1/2 11 == ωπ , sT 5,0/2 22 =ωπ . Po okreleniu czstoci własnych w celu wyznaczenia wektorów własnych korzysta si z równania ruchu (4.92). Dla pierwszej czstoci mamy: [ ] 01
21 =− wBK ω
co dalej w jawnej postaci daje:
=
−−
−−0023
22
11
21
21
ωω
ωω
mkk
kmk
które po wstawieniu wartoci mk /5,021 =ω jest równowane układowi równa
algebraicznych jednorodnych:
05,0
02
2211
2111
=+−=−
kwkw
kwkw
Układ ten ma nieskoczenie wiele rozwiza, co nie pozwala na wyznaczenie amplitudy drga swobodnych, lecz jedynie umoliwia wyznaczenie kształtu drga układu z dokładnoci do stałej. Mamy wic, po skreleniu drugiego równania: 1121 2ωω =
To umoliwia po przyjciu dowolnej wartoci 11ω obliczy warto 21ω . W praktyce postpujemy tak, aby maksymalna warto wektora w1 była równa jednoci:
=
0,15,0
1w
Druga czsto umoliwia okrelenie drugiego wektora własnego, czyli: [ ] 02
22 =− wBK ω
Po wstawieniu wartoci mkw /0,222 = otrzymuje si układ równa:
0
0
2212
2212
=−−=−−
kwkw
kwkw
z którego wynika: 2212 ww −= . Wektor własny w2 korzystnie jest przyj w postaci:
−=
0,10,1
2w
Macierz własna rozpatrywanego przykładu jest wic nastpujca:
−=
0,10,10,15,0
W , a
wektory własne pokazano na rys. 4.10.

Rys.4.10 Pierwsza i druga posta drga własnych układu. 5.2 Drgania swobodne tłumione
Jeeli układ mechaniczny zawiera oprócz sił sprystych a elementów tarcia wiskotycznego (siły tłumienia zalene liniowo od prdkoci), to równania róniczkowe ruchu układu w prostej postaci s nastpujce:
= =
=++n
j
n
jjijjiji qcqqa
1 1
***
1 0α ),...,2,1( ni = (4.99)
lub w postaci odwrotnej:
= =
=++n
j
n
kjikkijjji yymy
1 1
***
0δαδ (4.100)
gdzie: kα - współczynnik tłumienia wiskotycznego. Jeeli kady z kierunków k pokrywa si z kadym z kierunków j (tj. jeli wszystkie
elementy tarcia s przyłoone do mas układu), to liczba powyszych równa jest równa n. Jeeli s take elementy tarcia, które daj siły oporu nie przyłoone bezporednio do jednej z mas układu, to równanie (4.100) mona ułoy take dla kierunku działania tych sił, przy czym kady z takich elementów tarcia zwiksza liczb stopni swobody układu o 1/2.
Rozwizanie układu równa (4.99) opisuj drgania swobodne tłumione, tj. drgania, jakie wykonuje układ mechaniczny wyprowadzony z połoenia równowagi, przy warunkach pocztkowych ruchu rónych od zera. Warunki te zapisujemy w nastpujcy sposób:
0=t , 0ii qq = , 0
**
ii qq = , ),...,2,1( ni = (4.101) Przy tych warunkach pocztkowych naley zbada przebieg rozwiza układu, np.
(4.99). Rozwizania układu tych równa szukamy w postaci funkcji: t
ii eAq λ= (4.102) gdzie: Ai -pewne stałe rzeczywiste, λ - liczba rzeczywista lub zespolona.
Po podstawieniu (4.102) do (4.99) i uproszczeniu przez eλt otrzymamy:
= =
=++n
j
n
jjijiijii AcAAa
1 1
2 0αλλ (4.103)
Jest to liniowy układ równa algebraicznych o niewiadomych Ai. Układ ten posiada niezerowe rozwizania, jeli współczynnik przy niewiadomych jest równy zeru. Współczynnik ten piszemy w nastpujcej postaci:

(4.104)
Równanie (4.104) nazywa si równaniem charakterystycznym, a jego rozwizanie pierwiastkami charakterystycznymi. Równanie charakterystyczne moe posiada pierwiastki rzeczywiste lub zespolone. W przypadku pierwiastków rzeczywistych ogólne rozwizanie moemy napisa w postaci:
=
=n
j
tiji
jeAy1
λ (4.105)
Jeeli pierwiastki charakterystyczne s zespolone, ogólne rozwizanie ma posta:
=
−=n
jj
tviji
jeAy1
)sin( ϕω (4.106)
gdzie: ijA - rozwizanie układu (4.103), jϕ - stałe zalene do warunków pocztkowych,
jjv ω, - odpowiednie czci rzeczywiste i urojone pierwiastka charakterystycznego jλ .
Poniewa jλ w rozwizaniach (4.102) i ,jv w (4.103) s ujemne, rozwizania układu (4.99) d do zera. Rozwizania (4.102) d do zera asymptotycznie, nie wykonujc oscylacji, a rozwizania (4.103) d do zera w sposób oscylacyjny [8,13]. 5.3 Drgania wymuszone nietłumione
Nieraz na układ n punktów materialnych działaj siły spryste oraz siły zewntrzne zalene od czasu P(t), działajce w kierunku i = l, 2, ..., n. Równanie róniczkowe ruchu moemy w prostej postaci zapisa nastpujco:
)(1
**
tPyrym i
n
jiijii =+
=
(4.107)
lub w postaci odwrotnej:
)(1
**
11 tPymy j
n
jijji
n
jij
==
=+ δδ (4.108)
Rozwizanie ogólne układu (4.107) lub (4.108) składa si z rozwizania ogólnego układu jednorodnego i rozwizania szczególnego układu niejednorodnego. Rozwizania ogólnego układu jednorodnego opisuj drgania swobodne nietłumione, które pominiemy w dalszych rozwaaniach (w układach rzeczywistych wystpuje pewne tłumienie i drgania swobodne zanikaj, z tego wzgldu moemy rozwizanie drga swobodnych pomin), a zajmiemy si - rozwizaniem szczególnym układu niejednorodnego. Rozwizania te opisuj drgania, które nazywamy drganiami wymuszonymi.
Poniewa do układów liniowych stosuje si zasad superpozycji, mona rozwaa drgania wymuszone kolejno siłami przyłoonymi do poszczególnych punktów materialnych, a nastpnie otrzymane rozwizania dodawa. Rozwizania równa róniczkowych (4.107) lub (4.108) mona przedstawi w postaci rozłoenia na postacie własne:

=
=n
jjj tqay
111 )(
=
=n
jjj tqay
122 )( (4.109)
..........................
=
=n
jjnjn tqay
1
)(
gdzie: aij - amplitudy znormowanych postaci własnych drga, a funkcje qj(t) wyznacza si z układu równa róniczkowych ruchu :
=
=+n
jjj tPaqq
111
211
**
)(ω
=
=+n
jjj tPaqq
122
222
**
)(ω (4.110)
.....................................
=
=+n
jjjnnnn tPaqq
1
2**
)(ω
gdzie: nωω ,...,1 - czstoci drga własnych. Jeeli siły Pj(t) maj posta wymusze harmonicznych w postaci:
,sin011 tPP ω= ,sin022 tPP ω= ..., ,sin0 tPP nn ω= (4.111) to rozwizaniem dowolnego z równa (4.110) jest suma:
taP
qi
n
jjij
i ωωω
sin22
10
−=
= (4.112)
Zamiast (4.112) mona napisa:
taPa
yi
n
jjij
n
sis
i ωωω
sin22
10
1
−=
== (4.113)
W tym przypadku amplitudy drga mog by take otrzymane nie bezporednio, jeeli podstawi si w (4.107) lub (4.108): tAy ii ωsin= (4.114)
Amplitudy drga Ai wyznaczamy z układu równa algebraicznych otrzymanych po podstawieniu (4.114) do (4.107) lub (4.108) i uproszczeniu przez ωt w prostej postaci:
=
=+−n
jiiijii PArAm
10
2ω (4.115)
lub w postaci odwrotnej:
= =
=−n
jj
n
jijijij PAmA
10
1
2 δδω (4.116)
Po rozwizaniu tych równa otrzymamy amplitudy drga układu. W przeciwiestwie do drga swobodnych tłumionych, które opisuj stan przejciowy, drgania wymuszone okrelaj stan ustalony. Stanem ustalonym jest równie stan spoczynku w połoeniu równowagi układu mechanicznego. Drgania wymuszone układów z tłumieniem dodatnim opisuj stan ustalony stacjonarny, gdy siła wymuszajca jest funkcj okresow. Drgania wymuszone nietłumione opisuj stan ustalony niestacjonarny, gdy czsto siły wymuszajcej

jest równa jednej z czstoci własnej układu, tzn. gdy mamy do czynienia ze zjawiskiem rezonansu [14,33,71]. 5.4 Drgania wymuszone tłumione
Przy harmonicznych siłach wymuszajcych (4.111) wpływ sił tarcia wiskotycznego wyraa si w dwóch podstawowych efektach: - fazy drga rónych punktów układu nie pokrywaj si ze sob i róni si od fazy sił wymuszajcych, - amplitudy drga punktów układu s mniejsze od odpowiadajcych im amplitud układu bez tarcia i wszdzie s skoczone.
Dynamiczne równania ruchu w prostej postaci maj zapis:
)(1 1
***
tPyryym i
n
j
n
jiijiijii =++
= =
α (4.117)
lub w postaci odwrotnej:
)(11
***
11 tPyymy j
n
jij
n
jijjjjj
n
jij
===
=++ δδαδ (4.118)
Amplitudy drga wymuszonych wyznacza si drog podstawienia rozwizania: tbtay iii ωω cossin += , ),...,2,1( ni = (4.119) do równa róniczkowych ruchu. W miejsce wyraenia (4.119) mona take przyj: )sin( ϕω −= tAy ii , ),...,2,1( ni = (4.120) gdzie:
22iii baA += ,
i
ii a
b=ϕtg (4.121)
Kt ϕi nazywa si ktem przesunicia fazowego, za Ai - amplitud drga. Rozwaania przedstawione w tym punkcie znajduj zastosowanie podczas analizy
stanu dynamicznego układów mechanicznych o dwóch i wicej stopniach swobody. Wiele z informacji tu przedstawionych stanowi podstaw wprowadzanej do bada dynamiki maszyn analizy modalnej.