Ćwiczenie 18 Pomiary wielkości nieelektrycznych II ... · 6 2A. Pomiar położenia kątowego za...
14
1 Ćwiczenie 18 Pomiary wielkości nieelektrycznych II (pomiary położenia liniowego, kątowego oraz prędkości obrotowej) Program ćwiczenia: Przetworniki wielkości kątowych: 1. Obsługa silnika za pośrednictwem programu EziMOTION Plus‐R 2A. Pomiar położenia kątowego za pomocą enkodera inkrementalnego 2B. Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego 3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki statycznej 4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego Transformatorowy czujnik położenia liniowego: 5. Obserwacja sygnałów w torze przetwarzania 6. Pomiary wymiarów geometrycznych Wykaz przyrządów: Zasilacz/generator uniwersalny Oscyloskop Rigol DS1052E Multimetr Rigol DM3051 Układ do pomiaru wielkości kątowych Układ do pomiaru wielkości liniowych Literatura: [1] M. Miłek, Pomiary wielkości nieelektrycznych metodami elektrycznymi, Zielona Góra, 1998. [2] E. Romer, Miernictwo przemysłowe, PWN, Warszawa 1979. [3] A. Chwaleba, M. Poniński, A. Siedlecki, Metrologia elektryczna. WNT, Warszawa 1979, 1991, 1994, 2009 Dokumentacja techniczna przyrządów pomiarowych: [4] Katalog napędów EziMOTION Plus‐R [5] Dokumentacja techniczna czujnika położenia kątowego Burster 8820 [5] Dokumentacja techniczna przetwornika PTx200 oraz miernika MPL701 http://www.kmet.agh.edu.pl ‐> dydaktyka ‐> Materiały dla studentów Strony www: http://www.fastech.co.kr http://www.peltron.home.pl/przetworniki_przemieszczen1.html http://www.burster.com
Transcript of Ćwiczenie 18 Pomiary wielkości nieelektrycznych II ... · 6 2A. Pomiar położenia kątowego za...
1
Ćwiczenie 18
Pomiary wielkości nieelektrycznych II (pomiary położenia liniowego,
kątowego oraz prędkości obrotowej)
Program ćwiczenia:
Przetworniki wielkości kątowych:
1. Obsługa silnika za pośrednictwem programu EziMOTION Plus‐R 2A. Pomiar położenia kątowego za pomocą enkodera inkrementalnego 2B. Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego 3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki statycznej 4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego Transformatorowy czujnik położenia liniowego:
5. Obserwacja sygnałów w torze przetwarzania 6. Pomiary wymiarów geometrycznych
Wykaz przyrządów:
Zasilacz/generator uniwersalny
Oscyloskop Rigol DS1052E
Multimetr Rigol DM3051
Układ do pomiaru wielkości kątowych
Układ do pomiaru wielkości liniowych
Literatura:
[1] M. Miłek, Pomiary wielkości nieelektrycznych metodami elektrycznymi, Zielona Góra, 1998.
[2] E. Romer, Miernictwo przemysłowe, PWN, Warszawa 1979.
[3] A. Chwaleba, M. Poniński, A. Siedlecki, Metrologia elektryczna. WNT, Warszawa 1979, 1991, 1994, 2009
Dokumentacja techniczna przyrządów pomiarowych:
[4] Katalog napędów EziMOTION Plus‐R
[5] Dokumentacja techniczna czujnika położenia kątowego Burster 8820
[5] Dokumentacja techniczna przetwornika PTx200 oraz miernika MPL701
http://www.kmet.agh.edu.pl ‐> dydaktyka ‐> Materiały dla studentów
Strony www:
http://www.fastech.co.kr
http://www.peltron.home.pl/przetworniki_przemieszczen1.html
http://www.burster.com
2
Zakres wymaganych wiadomości:
1. Budowa i zasada działania silników krokowych oraz enkoderów (absolutnych i
inkrementalnych). Sposób pomiaru położenia kątowego i prędkości obrotowej za
pośrednictwem enkodra.
2. Sposób pomiaru położenia kątowego za pośrednictwem rezystancyjnych czujników
potencjometrycznych.
3. Pomiar prędkości obrotowej z wykorzystaniem tachogeneratorów prądu stałego i zmiennego
‐ budowa i zasada działania.
4. Charakterystyka statyczna przetworników pomiarowych i sposoby jej wyznaczania. Pojęcia
błędu czułości, zera i nieliniowości charakterystyki. Wyznaczanie liniowej aproksymacji
charakterystyki przetwornika metodą regresji liniowej (estymator najmniejszych kwadratów).
5. Budowa i zasada działania indukcyjnych przetworników położenia liniowego, w szczególności
przetworników dławikowych i transformatorowych.
6. Wyznaczanie błędów i niepewności pomiarowych.
Uwagi ogólne:
W ćwiczeniu jest wykorzystywany Mulitmetr RIGOL współpracujący z oprogramowaniem
Matlab.
Skrypty w programie Matlab wczytywane są za pomocą polecenia ‘Open’ z zakładki
‘Home’.
Po wczytaniu skryptu w oknie programu pojawi się jego treść. Program uruchamiany jest
klawiszem F5, lub poprzez kliknięcie ikony ‘Run’ w zakładce ‘Editor’.
Po uruchomieniu, program działa w tle, aż do momentu jego zatrzymania przez zamknięcie
okna z przebiegami sygnałów lub poprzez naciśnięcie kombinacji klawiszy ‘Ctr+C’. Dopiero
wtedy można wczytać kolejny skrypt i go uruchomić.
W Matlabie w łatwy sposób, można wykonywać zrzuty z ekranu (na potrzeby
sprawozdania). W tym celu wystarczy użyć opcji z menu ‘Edit ‐> Copy figure’, a obrazek
wkleić do programu Paint i zapisać.
UWAGA:Ćwiczeniemożnarozpocząćoddowolnego
punktu!Jeżelijednakzaczynaszodpunktu2,3lub4to
wcześniejnależyzaznajomićsięzobsługąprogramu
EziMOTION,czyliwykonaćpunkt1.
3
Wprowadzenie
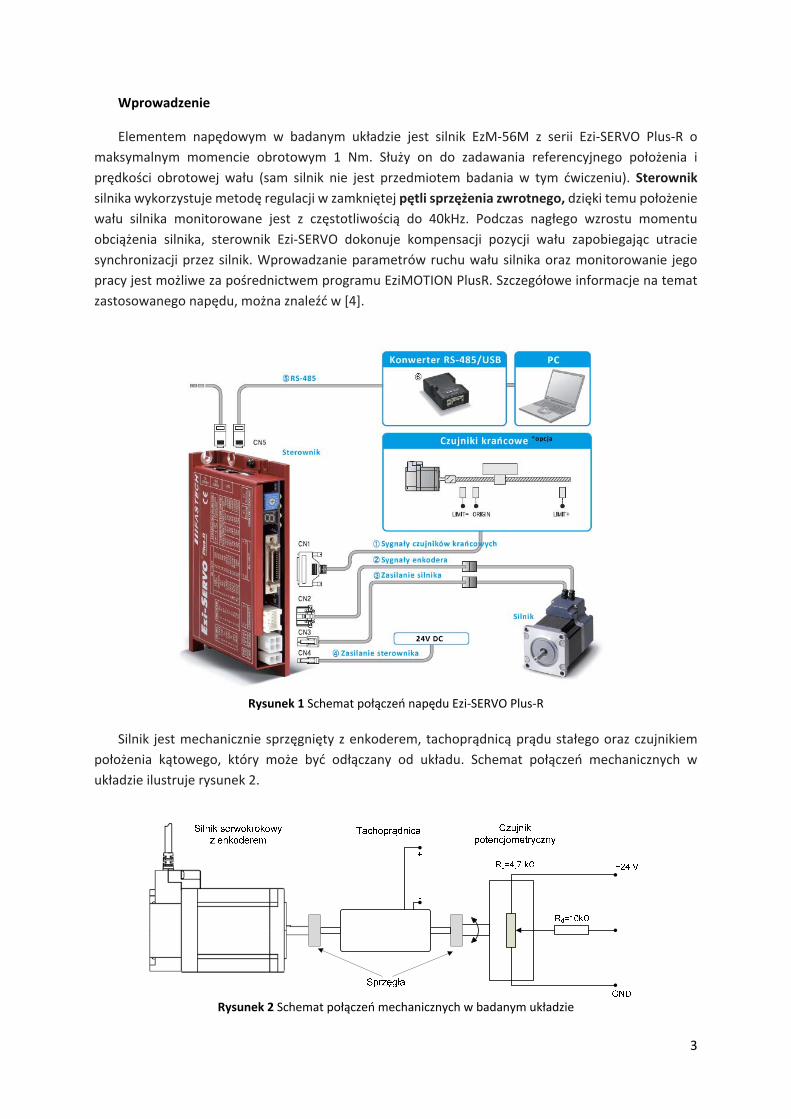
Elementem napędowym w badanym układzie jest silnik EzM‐56M z serii Ezi‐SERVO Plus‐R o
maksymalnym momencie obrotowym 1 Nm. Służy on do zadawania referencyjnego położenia i
prędkości obrotowej wału (sam silnik nie jest przedmiotem badania w tym ćwiczeniu). Sterownik
silnika wykorzystuje metodę regulacji w zamkniętej pętli sprzężenia zwrotnego, dzięki temu położenie
wału silnika monitorowane jest z częstotliwością do 40kHz. Podczas nagłego wzrostu momentu
obciążenia silnika, sterownik Ezi‐SERVO dokonuje kompensacji pozycji wału zapobiegając utracie
synchronizacji przez silnik. Wprowadzanie parametrów ruchu wału silnika oraz monitorowanie jego
pracy jest możliwe za pośrednictwem programu EziMOTION PlusR. Szczegółowe informacje na temat
zastosowanego napędu, można znaleźć w [4].
Rysunek 1 Schemat połączeń napędu Ezi‐SERVO Plus‐R
Silnik jest mechanicznie sprzęgnięty z enkoderem, tachoprądnicą prądu stałego oraz czujnikiem
położenia kątowego, który może być odłączany od układu. Schemat połączeń mechanicznych w
układzie ilustruje rysunek 2.
Rysunek 2 Schemat połączeń mechanicznych w badanym układzie
4
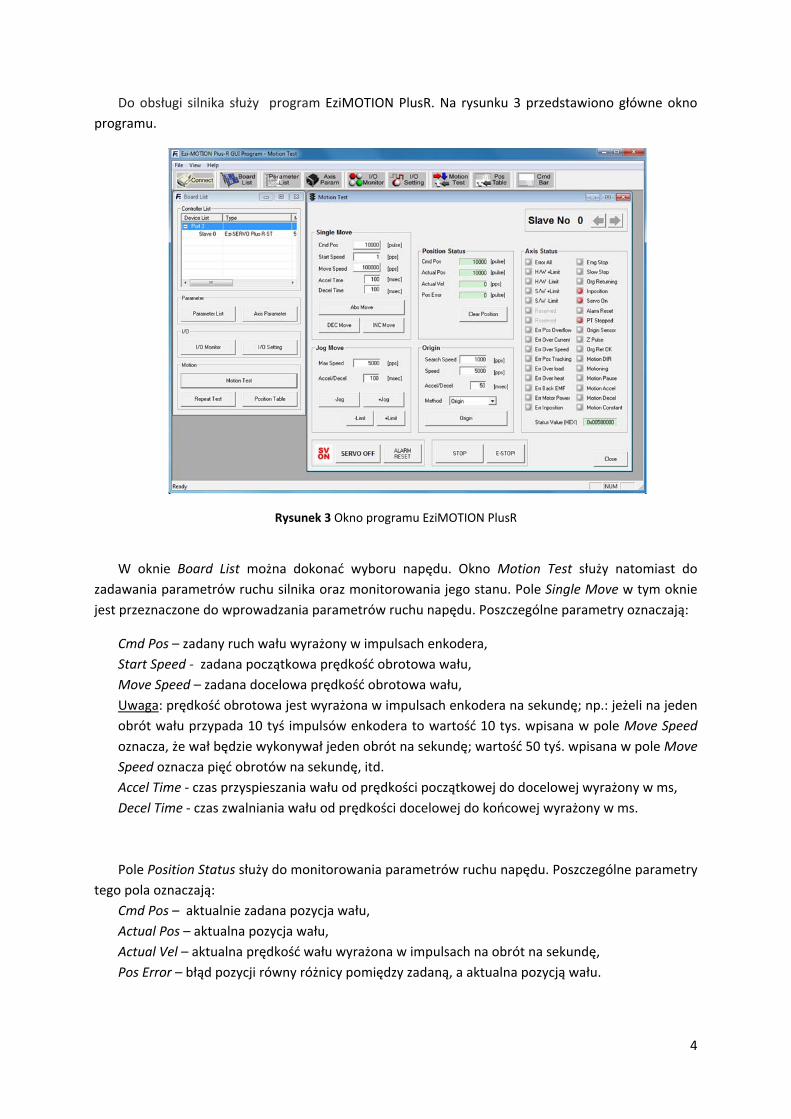
Do obsługi silnika służy program EziMOTION PlusR. Na rysunku 3 przedstawiono główne okno
programu.
Rysunek 3 Okno programu EziMOTION PlusR
W oknie Board List można dokonać wyboru napędu. Okno Motion Test służy natomiast do
zadawania parametrów ruchu silnika oraz monitorowania jego stanu. Pole Single Move w tym oknie
jest przeznaczone do wprowadzania parametrów ruchu napędu. Poszczególne parametry oznaczają:
Cmd Pos – zadany ruch wału wyrażony w impulsach enkodera,
Start Speed ‐ zadana początkowa prędkość obrotowa wału,
Move Speed – zadana docelowa prędkość obrotowa wału,
Uwaga: prędkość obrotowa jest wyrażona w impulsach enkodera na sekundę; np.: jeżeli na jeden
obrót wału przypada 10 tyś impulsów enkodera to wartość 10 tys. wpisana w pole Move Speed
oznacza, że wał będzie wykonywał jeden obrót na sekundę; wartość 50 tyś. wpisana w pole Move
Speed oznacza pięć obrotów na sekundę, itd.
Accel Time ‐ czas przyspieszania wału od prędkości początkowej do docelowej wyrażony w ms,
Decel Time ‐ czas zwalniania wału od prędkości docelowej do końcowej wyrażony w ms.
Pole Position Status służy do monitorowania parametrów ruchu napędu. Poszczególne parametry
tego pola oznaczają:
Cmd Pos – aktualnie zadana pozycja wału,
Actual Pos – aktualna pozycja wału,
Actual Vel – aktualna prędkość wału wyrażona w impulsach na obrót na sekundę,
Pos Error – błąd pozycji równy różnicy pomiędzy zadaną, a aktualna pozycją wału.
5
1. Obsługa silnika za pośrednictwem programu EziMOTION PlusR
Celem bieżącego punktu ćwiczenia jest poznanie właściwości napędu serwokrokowego, który służy
do zadawania referencyjnego położenia kątowego i prędkości obrotowej oraz poznanie obsługi
programu sterującego. Sam silnik nie jest przedmiotem badania w tym ćwiczeniu.
1) Upewnić się, że czujnik położenia kątowego jest odłączony mechanicznie od wału silnika, kabel USB jest podłączony do podstawy napędu, a zasilanie układu jest włączone.
2) Uruchomić program EziMOTION PlusR. Wybrać następujące parametry transmisji danych: numer
portu (Port No.) COM3, prędkość transmisji (Baudrate) 57600. Kliknąć przycisk Connect, a
następnie przejść do okna Motion Test.
3) W polu Single Move wpisać przykładowe parametry pracy napędu: pozycja (Cmd Pos) 50000,
prędkość początkowa (Start Speed) 1, prędkość docelowa (Move Speed) 10000, czas przyspieszania
od prędkości początkowej do docelowej (Accel Time) i zwalniania (Decel Time) 100.
4) Włączyć napęd klikając przycisk SERVO ON. Od tego momentu sterownik będzie utrzymywał wał
silnika w zadanej pozycji ‐ wału nie da się ręcznie obrócić.
5) Uruchomić silnik przyciskiem Abs Move. Po zatrzymaniu napędu zwrócić uwagę, że parametry Cmd
Pos oraz Actual Pos w polu Position Status są sobie równe – oznacza to, że wał silnika osiągnął
zadaną pozycję. Ewentualna różnica między wartościami tych parametrów jest równa błędowi
pozycjonowania wału Pos Error.
6) Przetestować działanie przycisków Abs Move, INC Move oraz DEC Move i na tej podstawie
zidentyfikować ich funkcje.
7) Kliknąć przycisk SERVO OFF aby wyłączyć napęd. Moment trzymający wał zostanie zwolniony.
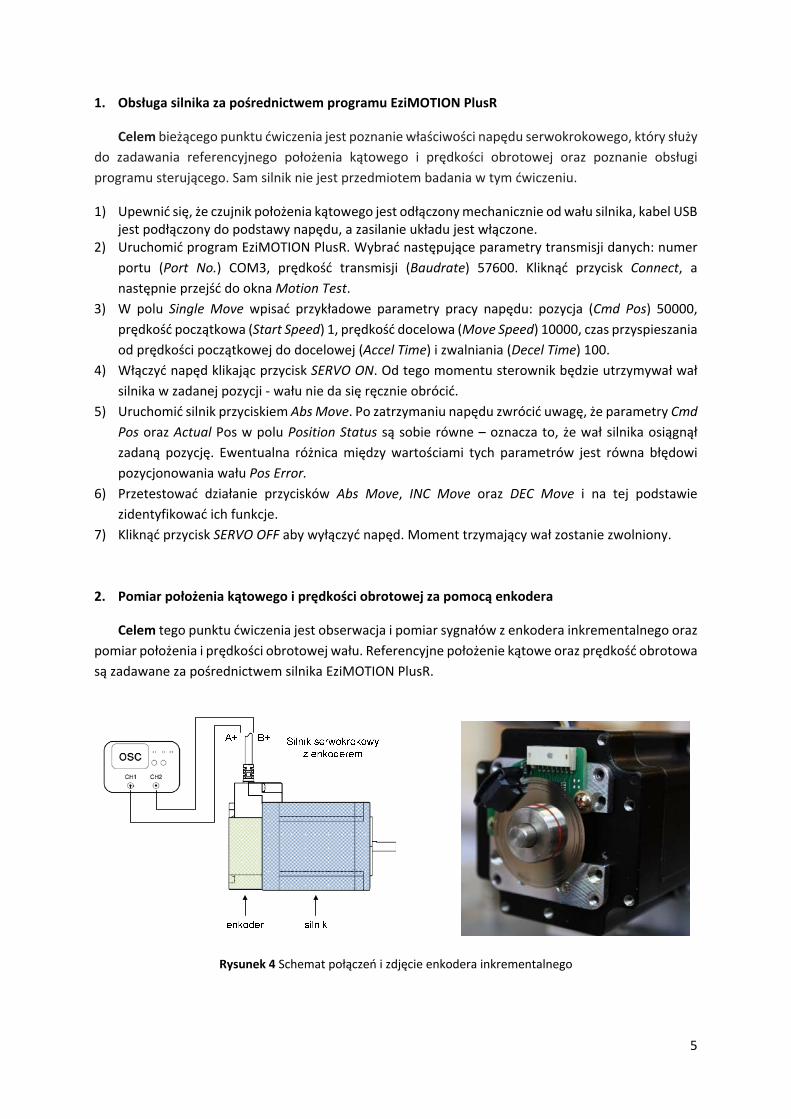
2. Pomiar położenia kątowego i prędkości obrotowej za pomocą enkodera
Celem tego punktu ćwiczenia jest obserwacja i pomiar sygnałów z enkodera inkrementalnego oraz
pomiar położenia i prędkości obrotowej wału. Referencyjne położenie kątowe oraz prędkość obrotowa
są zadawane za pośrednictwem silnika EziMOTION PlusR.
Rysunek 4 Schemat połączeń i zdjęcie enkodera inkrementalnego
6
2A. Pomiar położenia kątowego za pomocą enkodera inkrementalnego.
8) Wykonać punkty 1 – 3 niniejszej instrukcji, chyba, że zostały one już zrobione.
9) Upewnić się, że silnik jest wyłączony (w oknie Motion Test programu EziMOTION PlusR nie świeci
się kontrolka SVON, a wałem można swobodnie kręcić).
10) Wyzerować licznik impulsów enkodera (przycisk Clear Position w polu Position Status). Kręcąc
ręcznie wałem w obydwu kierunkach zaobserwować sygnały A+ i B+ enkodera za pomocą
oscyloskopu. (Ustawić oscyloskop w taki sposób, aby sygnały prostokątne na ekranie były łatwo
rozróżnialne: czułość kanałów 2V/dz, wartość współczynnika podstawy czasu 200us/dz).
Zwrócić uwagę na parametr Actual Pos w polu Position Status programu. Wyświetlana wartość to
zliczona przez licznik liczba impulsów z enkodera.
11) Oszacować liczbę impulsów enkodera przypadającą na obrót wału o 360°. Na tej podstawie określić
rozdzielczość r pomiaru położenia wału za pomocą enkodera.
2B. Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego.
12) Włączyć napęd klikając przycisk SERVO ON.
13) Przy ciągłym obrocie wału silnika zaobserwować sygnały A+ i B+ enkodera za pomocą oscyloskopu.
W tym celu w programie EziMOTION PlusR w polu Single Move wpisać wartość na tyle dużą aby
silnik obracał się w sposób ciągły przez kilkanaście sekund. Prędkość Move Speed zmienić na
100000 (ω1=10 obr/s).
14) Uruchomić silnik przyciskiem INC Move. Zaobserwować przebiegi na ekranie oscyloskopu, a w
sprawozdaniu naszkicować ich kształt.
15) Uruchomić silnik, tak aby wał obracał się w przeciwnym kierunku. Wykonać szkic sygnałów
analogiczne jak w poprzednim punkcie oraz za pomocą oscyloskopu zmierzyć częstotliwość f1
impulsów generowanych przez enkoder.
16) Ustawić prędkość obrotową na 40000 (ω2=4 obr/s), uruchomić silnik i zmierzyć częstotliwość f2
impulsów generowanych przez enkoder .
17) Wyłączyć napęd klikając przycisk SERVO OFF.
7
3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki
statycznej
Celem tego punktu ćwiczenia jest wyznaczenie charakterystyki statycznej potencjometrycznego
czujnika położenia kątowego Uwy=f(α), a więc wyznaczenie relacji pomiędzy wartościami napięcia
mierzonego na zaciskach czujnika, a referencyjnym położeniem kątowym wału α. Proces taki
nazywamy kalibracją (porównaj ćwiczenie 17 – Kalibracja wagi). Znajomość charakterystyki statycznej,
a w szczególności jej modelu liniowego służy do obliczenia wartości położenia kątowego na podstawie
pomiaru napięcia na zaciskach czujnika. Referencyjne położenie kątowe jest zadawane za
pośrednictwem silnika EziMOTION PlusR.
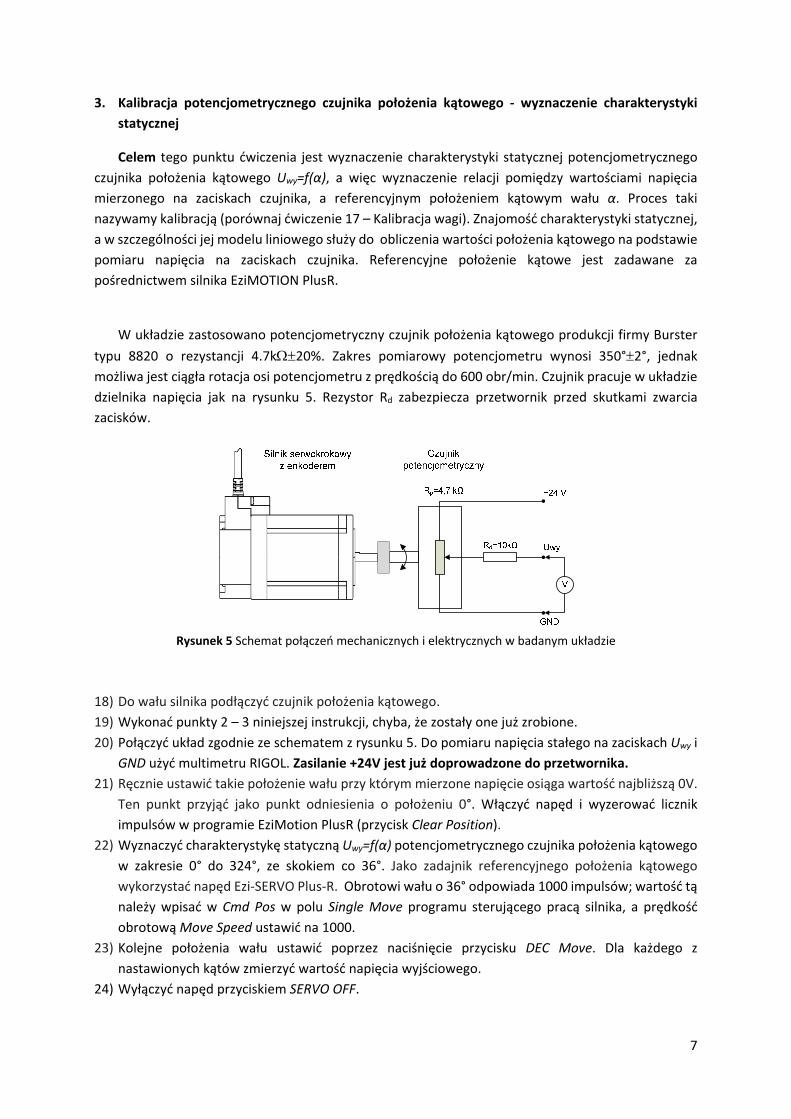
W układzie zastosowano potencjometryczny czujnik położenia kątowego produkcji firmy Burster
typu 8820 o rezystancji 4.7k20%. Zakres pomiarowy potencjometru wynosi 350°2°, jednak możliwa jest ciągła rotacja osi potencjometru z prędkością do 600 obr/min. Czujnik pracuje w układzie
dzielnika napięcia jak na rysunku 5. Rezystor Rd zabezpiecza przetwornik przed skutkami zwarcia
zacisków.
Rysunek 5 Schemat połączeń mechanicznych i elektrycznych w badanym układzie
18) Do wału silnika podłączyć czujnik położenia kątowego.
19) Wykonać punkty 2 – 3 niniejszej instrukcji, chyba, że zostały one już zrobione.
20) Połączyć układ zgodnie ze schematem z rysunku 5. Do pomiaru napięcia stałego na zaciskach Uwy i
GND użyć multimetru RIGOL. Zasilanie +24V jest już doprowadzone do przetwornika.
21) Ręcznie ustawić takie położenie wału przy którym mierzone napięcie osiąga wartość najbliższą 0V.
Ten punkt przyjąć jako punkt odniesienia o położeniu 0°. Włączyć napęd i wyzerować licznik
impulsów w programie EziMotion PlusR (przycisk Clear Position).
22) Wyznaczyć charakterystykę statyczną Uwy=f(α) potencjometrycznego czujnika położenia kątowego
w zakresie 0° do 324°, ze skokiem co 36°. Jako zadajnik referencyjnego położenia kątowego
wykorzystać napęd Ezi‐SERVO Plus‐R. Obrotowi wału o 36° odpowiada 1000 impulsów; wartość tą
należy wpisać w Cmd Pos w polu Single Move programu sterującego pracą silnika, a prędkość
obrotową Move Speed ustawić na 1000.
23) Kolejne położenia wału ustawić poprzez naciśnięcie przycisku DEC Move. Dla każdego z
nastawionych kątów zmierzyć wartość napięcia wyjściowego.
24) Wyłączyć napęd przyciskiem SERVO OFF.

8
Opracowanie wyników
25) Otrzymane punkty charakterystyki należy aproksymować prostą o równaniu:
[V] 0USU U
gdzie:
US ‐ czułość napięciowa czujnika położenia kątowego,
0U ‐ napięcie wyjściowe czujnika przy położeniu zerowym wału α=0,
‐ położenie kątowe wału.
Czułość napięciową SU i napięcie U0, które jednocześnie stanowią odpowiednio współczynnik
kierunkowy prostej oraz wyraz wolny, należy wyznaczyć metodą regresji liniowej (estymator
najmniejszych kwadratów). Obliczenia można wykonać ręcznie lub za pomocą programu Matlab.
W tym drugim przypadku po uruchomieniu programu, w oknie Command Window należy
wprowadzić dwa wektory odpowiadające wykonanym pomiarom a – położenie kątowe wału, U –
zmierzone wartości napięcia dla kolejnych położeń kątowych wału. (Uwaga: separatorem
dziesiętnym w Matlabie jest kropka „.”, a nie przecinek). Składnia polecenia jest następująca:
a = [0 36 72 108 144 180 216 252 288 324 ]
U = [U0 U36 U72 U108 U144 U180 U216 U252 U288 U324 ]
gdzie: U0 U36 … ‐ to zmierzone wartości napięcia.
Do aproksymacji liniowej danych pomiarowych można użyć narzędzia Curve Fitting z zakładki Apps.
Po uruchomieniu narzędzia Curve Fitting Tool, należy ustawić zmienną X data na a i zmienną Y data
na U. Program dokona aproksymacji.
Należy zanotować obliczone współczynniki prostej oraz utworzyć okno z rysunkiem przez polecenie
‘File ‐> Print to Figure’. Tak powstałe okno należy zapisać i umieścić w sprawozdaniu (W tym celu
wystarczy użyć opcji z menu ‘Edit ‐> Copy figure’, a obrazek wkleić do programu Paint i zapisać.)
26) Dla tak wyznaczonego modelu liniowego charakterystyki niezbędne jest określenie błędu
związanego z liniową interpolacją nieliniowej, rzeczywistej funkcji przetwarzania czujnika
położenia kątowego. Wartość bezwzględnego błędu nieliniowości funkcji przetwarzania wyznacza
się z zależności:
[V] max UUL wy
Można to zrobić ręcznie, lub posłużyć się opcją Residuals Plot z menu View.
9
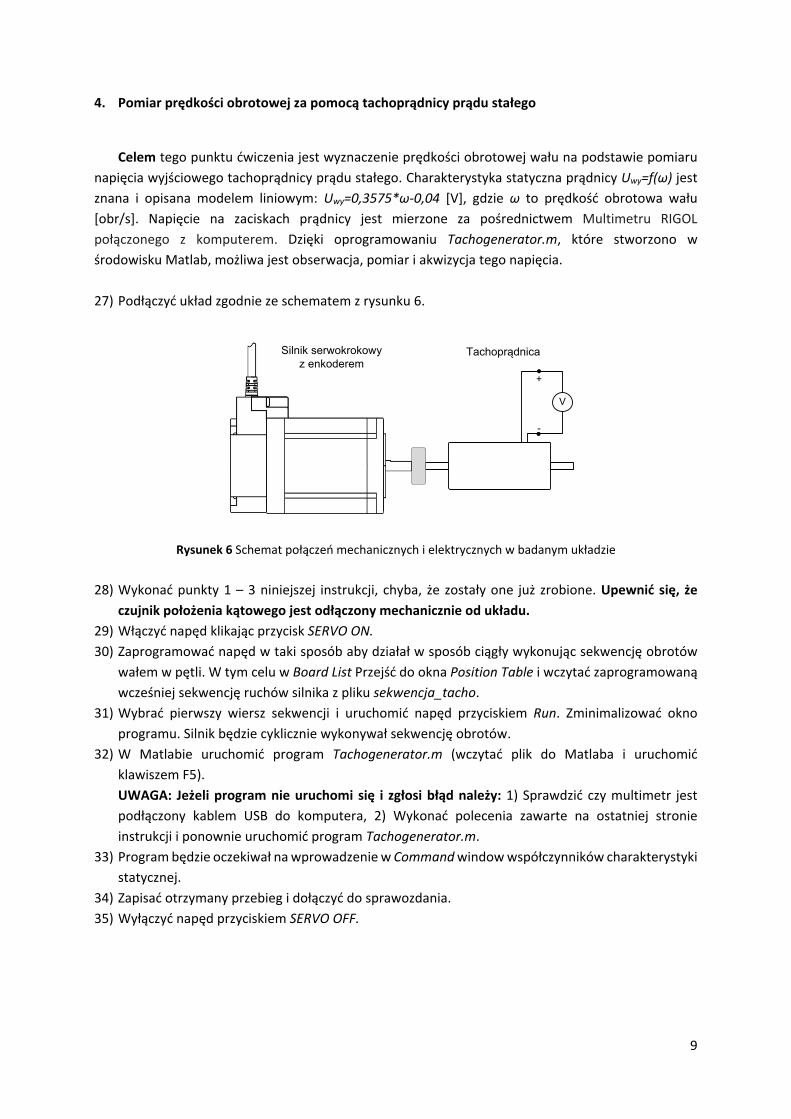
4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego
Celem tego punktu ćwiczenia jest wyznaczenie prędkości obrotowej wału na podstawie pomiaru
napięcia wyjściowego tachoprądnicy prądu stałego. Charakterystyka statyczna prądnicy Uwy=f(ω) jest
znana i opisana modelem liniowym: Uwy=0,3575*ω‐0,04 [V], gdzie ω to prędkość obrotowa wału
[obr/s]. Napięcie na zaciskach prądnicy jest mierzone za pośrednictwem Multimetru RIGOL
połączonego z komputerem. Dzięki oprogramowaniu Tachogenerator.m, które stworzono w
środowisku Matlab, możliwa jest obserwacja, pomiar i akwizycja tego napięcia.
27) Podłączyć układ zgodnie ze schematem z rysunku 6.
Silnik serwokrokowyz enkoderem
Tachoprądnica
+
-
V
Rysunek 6 Schemat połączeń mechanicznych i elektrycznych w badanym układzie
28) Wykonać punkty 1 – 3 niniejszej instrukcji, chyba, że zostały one już zrobione. Upewnić się, że
czujnik położenia kątowego jest odłączony mechanicznie od układu.
29) Włączyć napęd klikając przycisk SERVO ON.
30) Zaprogramować napęd w taki sposób aby działał w sposób ciągły wykonując sekwencję obrotów
wałem w pętli. W tym celu w Board List Przejść do okna Position Table i wczytać zaprogramowaną
wcześniej sekwencję ruchów silnika z pliku sekwencja_tacho.
31) Wybrać pierwszy wiersz sekwencji i uruchomić napęd przyciskiem Run. Zminimalizować okno
programu. Silnik będzie cyklicznie wykonywał sekwencję obrotów.
32) W Matlabie uruchomić program Tachogenerator.m (wczytać plik do Matlaba i uruchomić
klawiszem F5).
UWAGA: Jeżeli program nie uruchomi się i zgłosi błąd należy: 1) Sprawdzić czy multimetr jest
podłączony kablem USB do komputera, 2) Wykonać polecenia zawarte na ostatniej stronie
instrukcji i ponownie uruchomić program Tachogenerator.m.
33) Program będzie oczekiwał na wprowadzenie w Command window współczynników charakterystyki
statycznej.
34) Zapisać otrzymany przebieg i dołączyć do sprawozdania.
35) Wyłączyć napęd przyciskiem SERVO OFF.
10
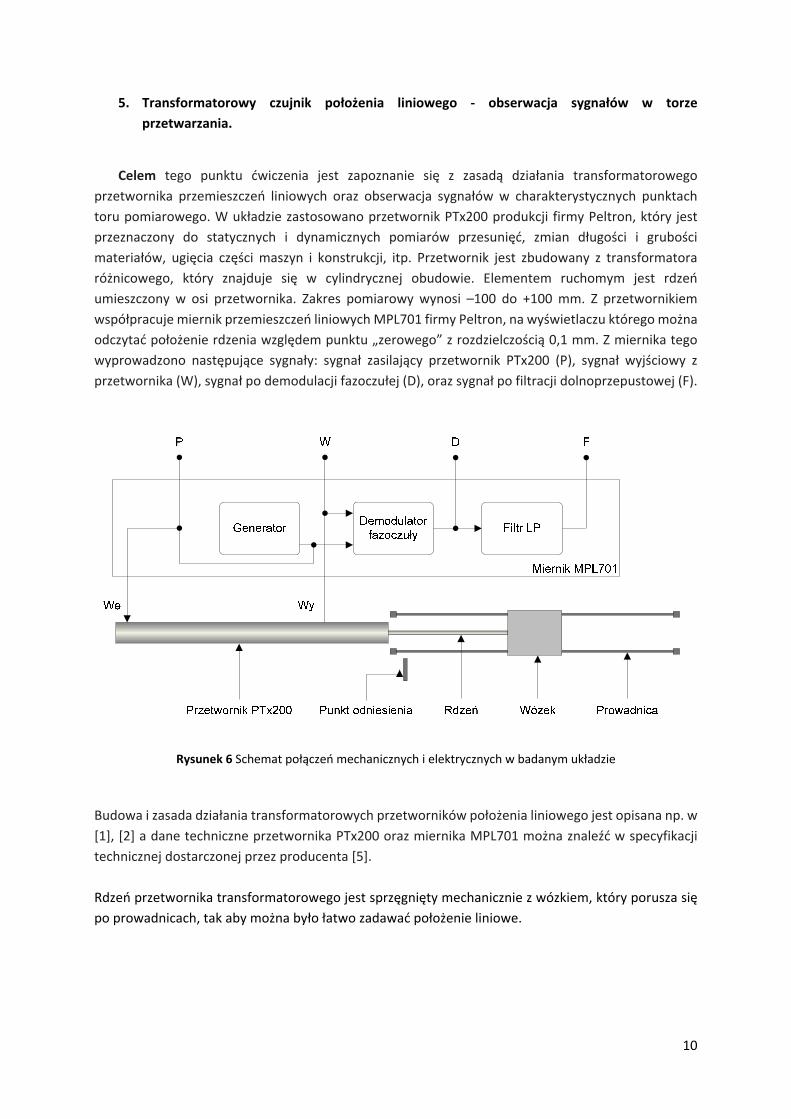
5. Transformatorowy czujnik położenia liniowego ‐ obserwacja sygnałów w torze
przetwarzania.
Celem tego punktu ćwiczenia jest zapoznanie się z zasadą działania transformatorowego
przetwornika przemieszczeń liniowych oraz obserwacja sygnałów w charakterystycznych punktach
toru pomiarowego. W układzie zastosowano przetwornik PTx200 produkcji firmy Peltron, który jest
przeznaczony do statycznych i dynamicznych pomiarów przesunięć, zmian długości i grubości
materiałów, ugięcia części maszyn i konstrukcji, itp. Przetwornik jest zbudowany z transformatora
różnicowego, który znajduje się w cylindrycznej obudowie. Elementem ruchomym jest rdzeń
umieszczony w osi przetwornika. Zakres pomiarowy wynosi –100 do +100 mm. Z przetwornikiem
współpracuje miernik przemieszczeń liniowych MPL701 firmy Peltron, na wyświetlaczu którego można
odczytać położenie rdzenia względem punktu „zerowego” z rozdzielczością 0,1 mm. Z miernika tego
wyprowadzono następujące sygnały: sygnał zasilający przetwornik PTx200 (P), sygnał wyjściowy z
przetwornika (W), sygnał po demodulacji fazoczułej (D), oraz sygnał po filtracji dolnoprzepustowej (F).
Rysunek 6 Schemat połączeń mechanicznych i elektrycznych w badanym układzie
Budowa i zasada działania transformatorowych przetworników położenia liniowego jest opisana np. w
[1], [2] a dane techniczne przetwornika PTx200 oraz miernika MPL701 można znaleźć w specyfikacji
technicznej dostarczonej przez producenta [5].
Rdzeń przetwornika transformatorowego jest sprzęgnięty mechanicznie z wózkiem, który porusza się
po prowadnicach, tak aby można było łatwo zadawać położenie liniowe.

11
36) Włączyć zasilanie miernika MPL701, oraz z zasilacza uniwersalnego doprowadzić zasilanie ±15V
do układu separatora.
37) Do kanału CH1 oscyloskopu doprowadzić sygnał wejściowy, zasilający uzwojenie pierwotne
przetwornika transformatorowego (P), a do kanału CH2 sygnał wyjściowy z uzwojenia
wtórnego transformatora (W).
38) Zmierzyć częstotliwość i amplitudę sygnału zasilającego przetwornik.
39) Poruszając rdzeniem przetwornika zaobserwować zmiany amplitudy i fazy sygnału
wyjściowego. Na tej postawie uzupełnić rysunki w konspekcie dla położeń rdzenia: ‐80mm oraz
40mm.
40) Do kanału CH2 doprowadzić sygnał po demodulacji fazoczułej (D). Poruszając rdzeniem
przetwornika zaobserwować zmiany w kształcie sygnału. Uzupełnić rysunki w konspekcie dla
ww. położeń rdzenia.
41) Do kanału CH2 doprowadzić sygnał po filtracji (F). Poruszając rdzeniem przetwornika
zaobserwować zmiany sygnału. Uzupełnić rysunki w konspekcie dla ww. położeń rdzenia.
6. Transformatorowy czujnik położenia liniowego ‐ pomiary wymiarów geometrycznych.
Celem tego punktu ćwiczenia jest wykonanie pomiarów wymiarów geometrycznych
prostopadłościennej próbki. Aby wyznaczyć dany wymiar należy wykonać dwa pomiary: położenia
punktu odniesienia Xp i położenia końca próbki względem punktu odniesienia Xk. Wymiar liniowy
próbki jest więc różnicą:
pk XXX
Wyniki pomiarów należy odczytać z wyświetlacza miernika MPL701.
42) Włączyć zasilanie miernika MPL701.
43) Wykonać niezbędne pomiary do wyznaczenia wymiarów geometrycznych próbki: A – długość,
B – szerokość, C – wysokość.
44) Wyznaczyć niepewności pomiarowe wg poniższego schematu.
Producent podaje błąd graniczny pomiaru jako:
[mm] 1100
3,0LSB
xxgr
.
Niepewność pomiaru wielkości X, jest więc zależna od niepewności „cząstkowych” z jakimi wyznaczone
są Xk i Xp, a do jej wyznaczenia należy posłużyć się prawem propagacji błędów dla pomiarów
pośrednich:
pBp
kBk
XuX
XXu
X
XXu 2
2
22

12
po prostych przekształceniach otrzymujemy:
pBkB XuXuXu 22
Niepewność złożona pomiaru X jest sumą geometryczną niepewności typu B kB Xu , pB Xu pomiaru
Xk i Xp. Niepewności te są związane z błędami granicznymi zależnościami:
3
kgrkB
XXu
,
3
pgrpB
XXu
13
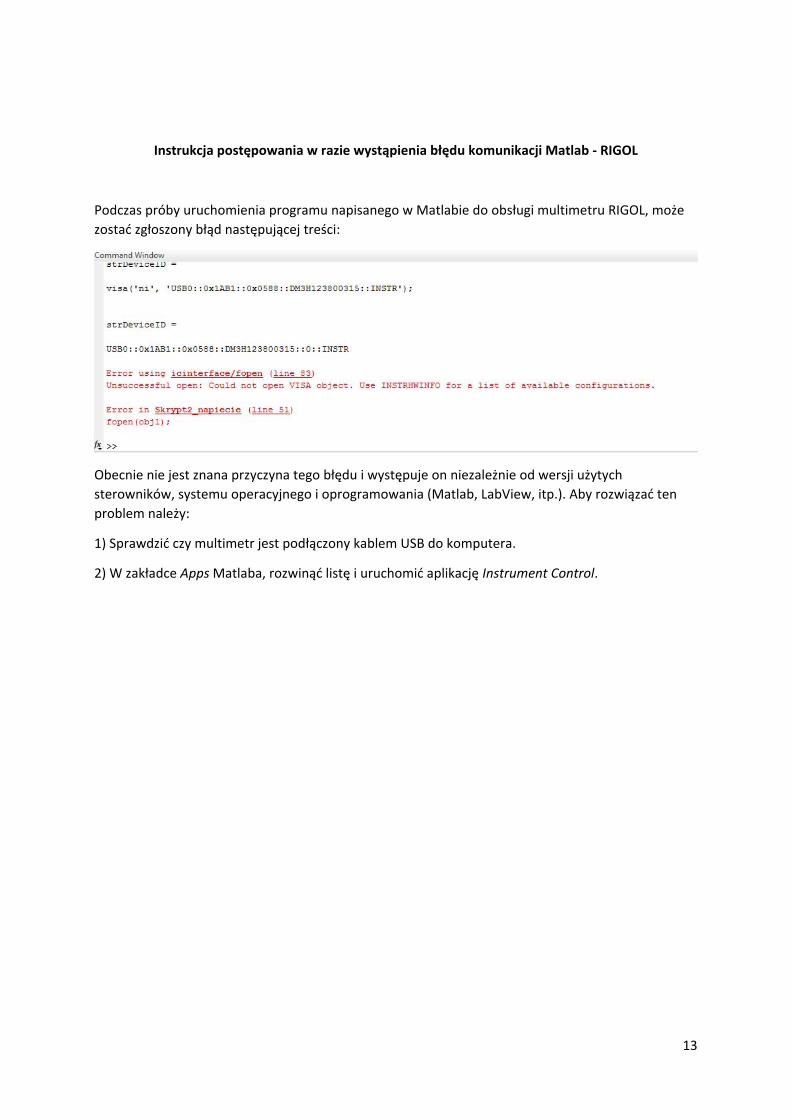
Instrukcja postępowania w razie wystąpienia błędu komunikacji Matlab ‐ RIGOL
Podczas próby uruchomienia programu napisanego w Matlabie do obsługi multimetru RIGOL, może
zostać zgłoszony błąd następującej treści:
Obecnie nie jest znana przyczyna tego błędu i występuje on niezależnie od wersji użytych
sterowników, systemu operacyjnego i oprogramowania (Matlab, LabView, itp.). Aby rozwiązać ten
problem należy:
1) Sprawdzić czy multimetr jest podłączony kablem USB do komputera.
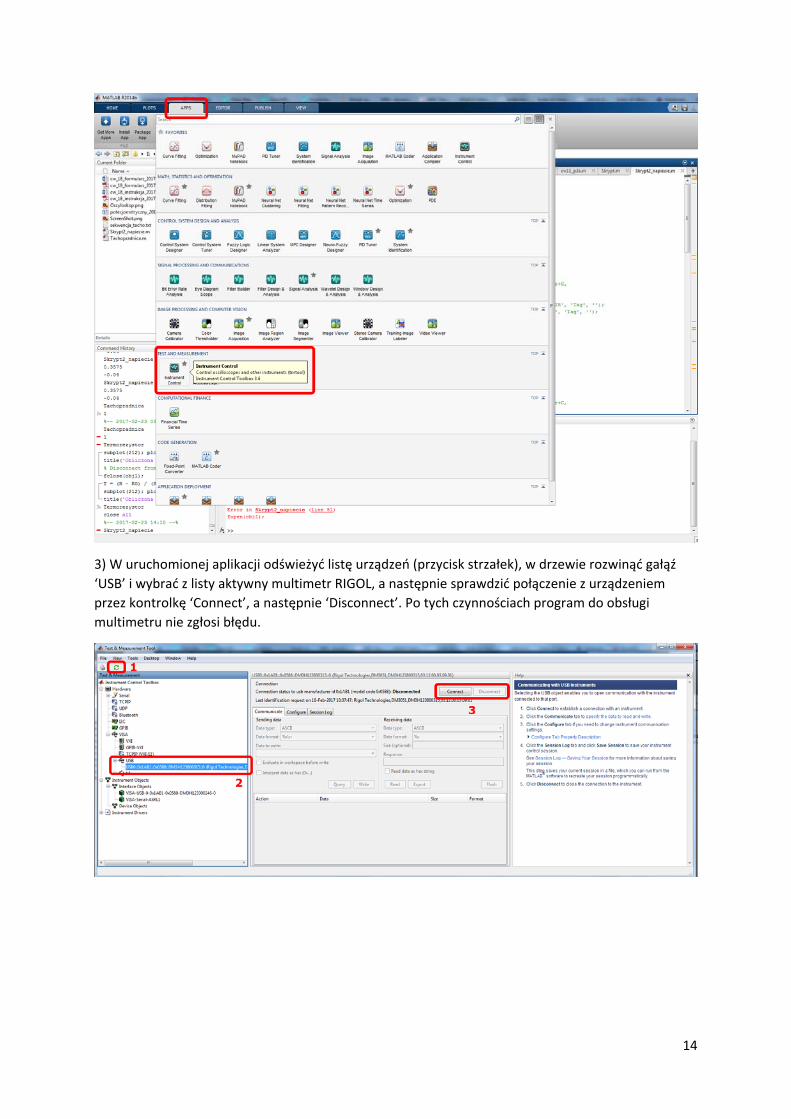
2) W zakładce Apps Matlaba, rozwinąć listę i uruchomić aplikację Instrument Control.
14
3) W uruchomionej aplikacji odświeżyć listę urządzeń (przycisk strzałek), w drzewie rozwinąć gałąź
‘USB’ i wybrać z listy aktywny multimetr RIGOL, a następnie sprawdzić połączenie z urządzeniem
przez kontrolkę ‘Connect’, a następnie ‘Disconnect’. Po tych czynnościach program do obsługi
multimetru nie zgłosi błędu.