LABORATORIUM METROLOGII Ćw. 18: Pomiary …. 1 Imię i nazwisko (e‐mail): Rok: Grupa: Zespół:...
12
str. 1 Imię i nazwisko (e‐mail): Rok: Grupa: Zespół: Data wykonania: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych II Zaliczenie: Podpis prowadzącego: Uwagi: Celem ćwiczenia jest poznanie metod pomiaru wielkości nieelektrycznych: położenia liniowego i kątowego oraz prędkości obrotowej. Każdy punkt niniejszego sprawozdania należy wykonać z należytą dokładnością. Szczególną uwagę należy zwrócić na opracowanie wniosków, które należy sformułować na podstawie zdobytej wiedzy na temat danego zagadnienia oraz przeprowadzonych pomiarów. Wnioskiem nie jest opis wykonanych na zajęciach pomiarów! Każdy punkt ćwiczenia powinien zawierać: schemat układu pomiarowego, krótki opis metodyki pomiarów, tabele z wynikami pomiarów i wynikami końcowymi oraz wykresy, obliczenia: wzory i przykład obliczeń, wnioski, wykaz zastosowanych przyrządów. Podstawą wykonania sprawozdania jest instrukcja do ćwiczenia. Instrukcję jak również niniejszy konspekt można pobrać ze strony Katedry Metrologii AGH: http://www.kmet.agh.edu.pl ‐> dydaktyka ‐> Materiały dla studentów. Przetworniki wielkości kątowych: 1. Obsługa silnika za pośrednictwem programu EziMOTION Plus‐R 2A. Pomiar położenia kątowego za pomocą enkodera inkrementalnego 2B. Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego 3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki statycznej 4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego Transformatorowy czujnik położenia liniowego: 5. Obserwacja sygnałów w torze przetwarzania 6. Pomiary wymiarów geometrycznych Wydział: EAIiIB Kierunek:
Transcript of LABORATORIUM METROLOGII Ćw. 18: Pomiary …. 1 Imię i nazwisko (e‐mail): Rok: Grupa: Zespół:...
str. 1
Imię i nazwisko (e‐mail):
Rok:
Grupa:
Zespół:
Data wykonania:
LABORATORIUM METROLOGII
Ćw. 18: Pomiary wielkości nieelektrycznych II Zaliczenie:
Podpis prowadzącego: Uwagi:
Celem ćwiczenia jest poznanie metod pomiaru wielkości nieelektrycznych: położenia liniowego i
kątowego oraz prędkości obrotowej.
Każdy punkt niniejszego sprawozdania należy wykonać z należytą dokładnością. Szczególną uwagę
należy zwrócić na opracowanie wniosków, które należy sformułować na podstawie zdobytej wiedzy na
temat danego zagadnienia oraz przeprowadzonych pomiarów. Wnioskiem nie jest opis wykonanych
na zajęciach pomiarów! Każdy punkt ćwiczenia powinien zawierać:
schemat układu pomiarowego,
krótki opis metodyki pomiarów,
tabele z wynikami pomiarów i wynikami końcowymi oraz wykresy,
obliczenia: wzory i przykład obliczeń,
wnioski,
wykaz zastosowanych przyrządów.
Podstawą wykonania sprawozdania jest instrukcja do ćwiczenia. Instrukcję jak również niniejszy
konspekt można pobrać ze strony Katedry Metrologii AGH: http://www.kmet.agh.edu.pl ‐> dydaktyka
‐> Materiały dla studentów.
Przetworniki wielkości kątowych:
1. Obsługa silnika za pośrednictwem programu EziMOTION Plus‐R 2A. Pomiar położenia kątowego za pomocą enkodera inkrementalnego 2B. Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego 3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki statycznej 4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego Transformatorowy czujnik położenia liniowego:
5. Obserwacja sygnałów w torze przetwarzania 6. Pomiary wymiarów geometrycznych
Wydział: EAIiIB Kierunek:

str. 2
1. Obsługa silnika za pośrednictwem programu EziMOTION PlusR.
a) Schemat połączeń oraz krótka charakterystyka zastosowanego napędu
Krótko scharakteryzuj zastosowany w ćwiczeniu napęd i jego parametry. Do czego w
ćwiczeniu służy silnik? Jakie jest znaczenie funkcji ‘Abs Move’, ‘INC Move’, ‘DEC move’?
str. 3
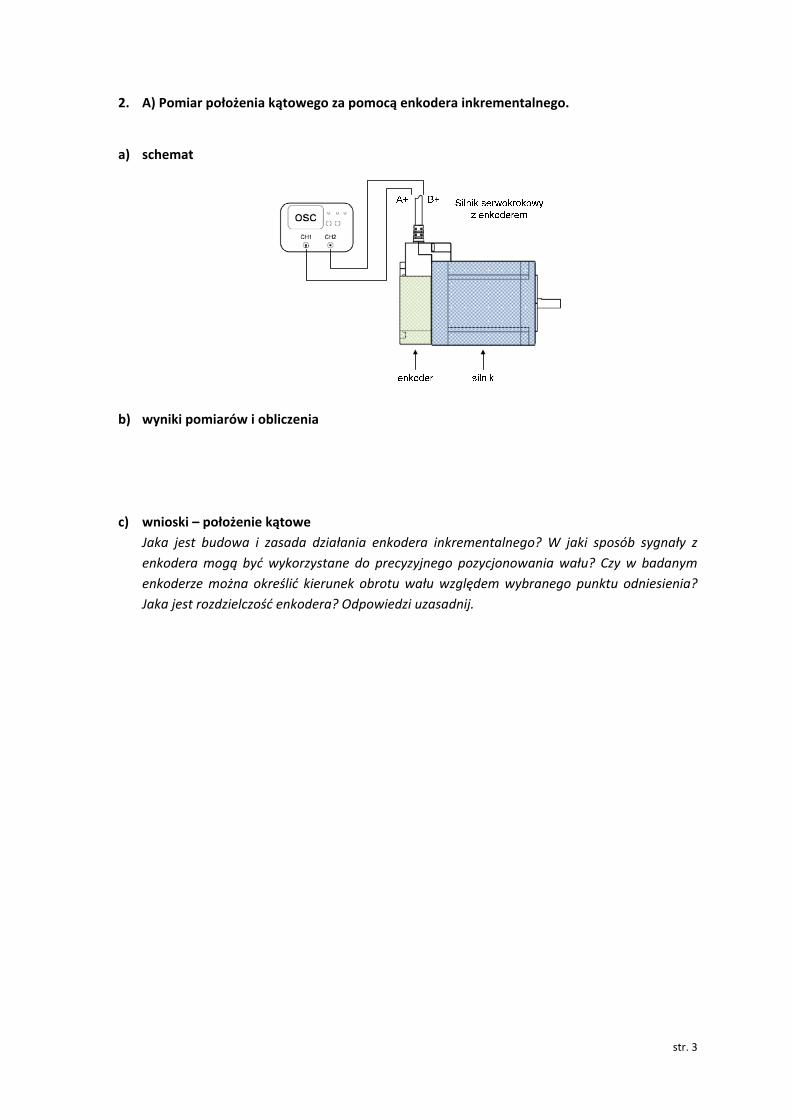
2. A) Pomiar położenia kątowego za pomocą enkodera inkrementalnego.
a) schemat
b) wyniki pomiarów i obliczenia
c) wnioski – położenie kątowe
Jaka jest budowa i zasada działania enkodera inkrementalnego? W jaki sposób sygnały z
enkodera mogą być wykorzystane do precyzyjnego pozycjonowania wału? Czy w badanym
enkoderze można określić kierunek obrotu wału względem wybranego punktu odniesienia?
Jaka jest rozdzielczość enkodera? Odpowiedzi uzasadnij.

str. 4
2. B) Pomiar prędkości obrotowej za pomocą enkodera inkrementalnego.
a) wyniki pomiarów
Sygnały A+ i B+ enkodera, dla obydwu kierunków wirowania wału przy tej samej prędkości są
przedstawione na rysunku:
b) wnioski – prędkość kątowa
Jaką informację zawiera przesunięcie fazowe między sygnałami A+ i B+? Czy zadana w
programie prędkość wirowania wału wyrażona w impulsach na sekundę jest taka sama jak
zmierzona częstotliwość impulsów enkodera? Jeśli tak (lub nie) to to dlaczego?
Dla kierunku INC (+) Dla kierunku DEC (‐)

str. 5
3. Kalibracja potencjometrycznego czujnika położenia kątowego ‐ wyznaczenie charakterystyki
statycznej
a) schemat
b) wyniki pomiarów i obliczenia
Tabela 2
Lp. α [°] Uwy [V]
1
2
3
4
5
6
7
8
9
10
11

str. 6
Poniżej umieścić rysunek dopasowanego modelu liniowego do wyników pomiarowych. Ile
wynoszą współczynniki modelu?
c) wnioski
Jaka jest budowa i zasada działania potencjometrycznego czujnika położenia kątowego? Ile
wynosi błąd nieliniowości? Czy przyjęty model liniowy poprawnie opisuje charakterystykę
statyczną czujnika? Do czego może służyć tak wyznaczona charakterystyka czujnika?

str. 7
4. Pomiar prędkości obrotowej za pomocą tachoprądnicy prądu stałego.
a) Schemat
b) wyniki pomiarów i rysunki
str. 8
c) wnioski
Jaka jest zasada działania tachoprądnicy prądu stałego? W jaki sposób można wykorzystać
znajomość charakterystyki statycznej prądnicy do pomiaru prędkości obrotowej wału? Czy dla
danej prędkości obrotowej wału wartość napięcia wyjściowego prądnicy zależy od kierunku
wirowania?
str. 9
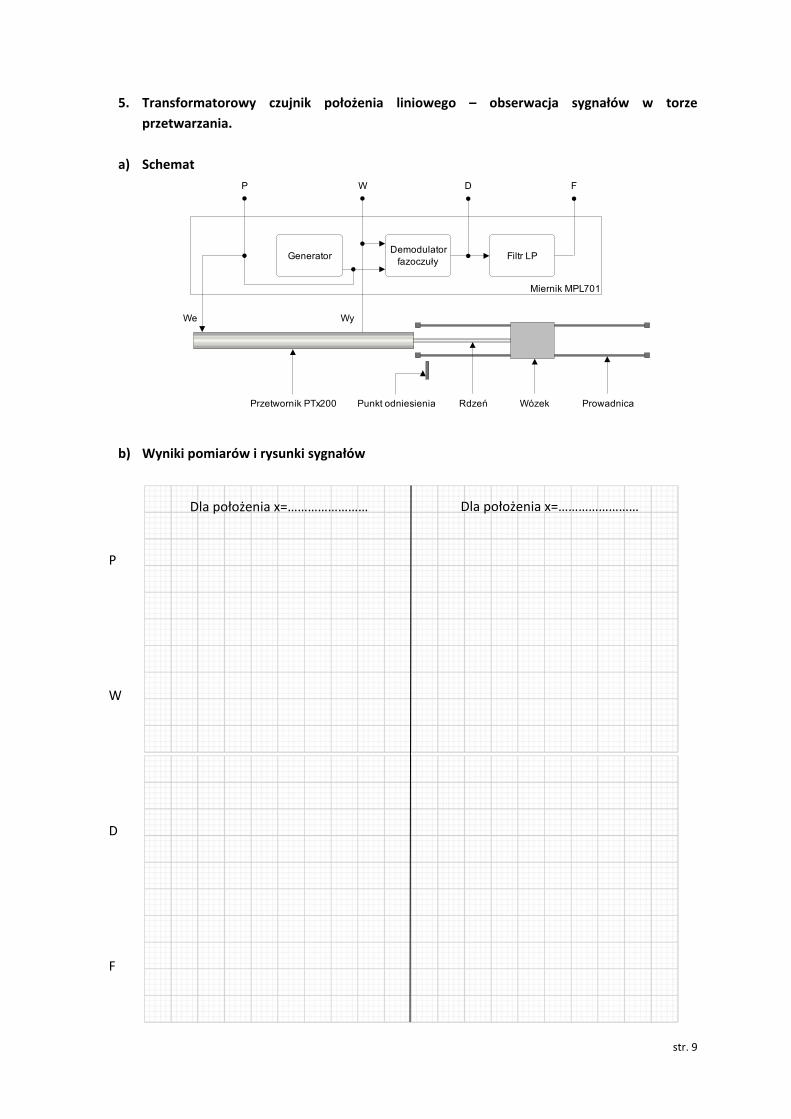
5. Transformatorowy czujnik położenia liniowego – obserwacja sygnałów w torze
przetwarzania.
a) Schemat
GeneratorDemodulator
fazoczułyFiltr LP
Przetwornik PTx200 Rdzeń Wózek Prowadnica
Miernik MPL701
P W D F
Punkt odniesienia
We Wy
b) Wyniki pomiarów i rysunki sygnałów
Dla położenia x=…………………… Dla położenia x=……………………
P
W
D
F

str. 10
c) Wnioski
Od czego zależy zmiana amplitudy sygnału wyjściowego, a od czego zmiana jego fazy
względem sygnału wejściowego? Czy sygnał po demodulacji fazoczułej niesie informacje o
położeniu rdzenia względem punktu zerowego? Jak można wykorzystać sygnał po filtracji
dolnoprzepustowej do pomiaru położenia rdzenia?
str. 11
6. Transformatorowy czujnik położenia liniowego – pomiary wymiarów geometrycznych.
a) Wyniki pomiarów
Tabela 3
Wymiar Xp [mm] Xk [mm] X [mm] U(X)
A
B
C
b) Wzory i obliczenia

str. 12
c) wnioski
Wykaz przyrządów i użytych w ćwiczeniu elementów