Robust device independent randomness amplification with few devices
description

CUDA(Compute Unified Device Architecture)
W. Bożejko
GPGPU - General-purpose computing on graphics processing units

Plan
• Wstęp
• Model programowania
• Model pamięci
• CUDA API
• Przykład – iloczyn skalarny

Wstęp

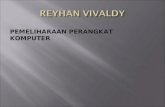
Tesla C870
Produkt Tesla C870
Obudowa ATX, 4.38” x 12.28”
Ilość GPU Tesla 1
Dedykowana pamięć 1.5 GB GDDR3
Szczytowa wydajność Ponad 500 gigaflopów
Precyzja obliczeń zmiennoprzecinkowych
Pojedyncza precyzja w standardzie IEEE 754
Interfejs pamięci 384-bit
Przepustowość pamięci 76.8 GBps
Maksymalny pobór mocy 170W
Interfejs systemowy PCI Express x16
Dodatkowe źródła zasilania Tak (2)Liczba slotów 2
Chłodzenie wentylator
• całkowity rozmiar pamięci globalnej 1,61 GB
• liczba multiprocesorów 16• liczba rdzeni (procesorów) 128• całkowity rozmiar pamięci stałej 65536 KB
• całkowity rozmiar pamięci współdzielonej przypadającej na jeden blok 16384 KB
• liczba rejestrów dostępna dla każdego bloku 8192
• częstotliwość zegara 1,35 GHz

CUDA – model programowania
• GPU jest widziane jako urządzenie obliczeniowe mogące wykonać część aplikacji która– musi być wykonana wielokrotnie– może być wyizolowana jako funkcja– działa niezależnie na różnych danych (model
SIMD)
• Taka funkcja może być skompilowana o wykonana na GPU

CUDA – model programowania
• Blok wątków (Thread Block)– Wątki mogą kooperować
• Mają szybką pamięć współdzieloną• Są zsynchronizowane• można je łatwo rozróżniać (mają Thread ID)
– Blok może być 1,2 lub 3-wymiarową tablicą

CUDA – model programowania
• Grid bloków wątków– Ograniczona ilość wątków w bloku– Pozwala wywołać większą liczbę wątków za
pomocą jednego wywołania– Bloki są identyfikowane za pomocą block ID
– Wymaga zmniejszenia kooperacji wątków
– Bloki mogą być 1 lub 2-wymiarowymi tablicami

CUDA – model programowania

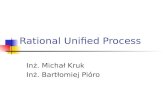
CUDA – model pamięci

CUDA – model pamięci• Shared Memory
– Wbudowana w chip• Znacznie szybsza niż pamięć lokalna i globalna• Tak szybka jak rejestry (jeśli nie ma konfliktów) • Dzielna na równej wielkości banki
– Kolejne 32-bitowe słowa są przypisane do kolejnych banków,
– Każdy bank ma przepustowość (bandwidth) 32 bity na 1 cykl zegara

CUDA – model pamięci• Shared Memory

CUDA API• Rozszerzenie języka C
– Kwalifikatory typu funkcji specyfikujące wykonanie na procesorze (host) lub na urządzeniu GPU
– Kwalifikatory typu zmiennej specyfikujące rodzaj pamięci w GPU
– Nowe składnia <<< mówiąca jak wykonać program na urządzeniu
– Cztery wbudowane zmienne pamiętające rozmiary grid’a i bloku oraz numery bloku i wątku

CUDA API• Kwalifikatory typu funkcji
__device__ • Wykonywane na GPU• Wywoływane tylko z GPU
__global__ • Wykonywane na GPU• Wywoływane tylko z procesora głównego (host’a)
__host__ • Wykonywane na host’cie, • Wywoływane tylko z procesora głównego (host’a)

CUDA API• Kwalifikatory typu zmiennych
__device__ • Umieszone w pamięci globalnej• Widoczne przez cały czas działania programu• Dostępne dla wszystkich wątków w grid’zie oraz z hosta (poprzez
runtime library)
__constant__ (ewentulanie razem z __device__) • Umieszczone w pamięci stałej (constant memory space), • Widoczne przez cały czas działania programu• Dostępne dla wszystkich wątków w grid’zie oraz z hosta (poprzez
runtime library)•
__shared__ (ewentulanie razem z __device__) • Umieszczone w pamięci współdzielonej (shared memory) bloku danego
wątku• Widoczne tak długo jak istnieje blok• Dostępne tylko dla wszystkich wątków w bloku

CUDA API• Konfiguracja wykonania
– Musi być sprecyzowana dla kazdego wywołania funkcji typu __global__
– Definiuje rozmiary grid’a i bloków– Umieszczana pomiędzy nazwą funkcji a listą
argumentów:
funkcja:__global__ void Func(float* parameter);
musi być wywołana tak: Func<<< Dg, Db, Ns >>>(parameter);

CUDA API• Konfiguracja wykonania
gdzie Dg, Db, Ns są:
– Dg jest typu dim3 wymiar i rozmiar gridaDg.x * Dg.y = ilość uruchamianych bloków;
– Db jest typu dim3 wymiar i rozmiar blokówDb.x * Db.y * Db.z = ilość wątków na blok;
– Ns jest typu size_t ilość bajtów w pamięci współdzielonej (shared memory) która jest dynamiczne alokowana dodatkowo do pamięci alokowanej statycznie
• Ns jest opcjonalne; domyślnie 0.

CUDA API• Wbdowane zmienne
– gridDim typu dim3 wymiary grida.
– blockIdx typu uint3 number bloku w grid’zie
– blockDim typu dim3 wymiary bloku
– threadIdx is of type uint3 numer wątku w
bloku

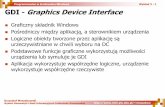
Przykład – iloczyn skalarny• Policzyć iloczyn skalarny
– 32 par wektorów– Kożdy po 4096 elementów
• Efektywna organizacja obliczeń:– grid składający się z 32 bloków– z 256 wątkami na blok
• Otrzymamy 4096/265 = 16 segmentów na wektor

• Dane będą trzymane w GPU jako dwie tablice; wynik umieszczony zostanie w tablicy
• Każdy iloczyn par wektórw An, Bn będzie obliczany w segmentach, dodawanych do wyniku
Vector A0 Vector A1 Vector AN-1…Vector B0 Vector B1 Vector BN-1…
Results 0 to N-1
Vector A0
Vector B0
Results 0 Results 1
Partial results 0 to S-1
segment 0 segment 1 segment S-1…
Przykład – iloczyn skalarny

Program dla host’aint main(int argc, char *argv[]){
CUT_CHECK_DEVICE(); …
h_A = (float *)malloc(DATA_SZ); …
cudaMalloc((void **)&d_A, DATA_SZ); …
cudaMemcpy(d_A, h_A, DATA_SZ, cudaMemcpyHostToDevice);
… ProdGPU<<<BLOCK_N, THREAD_N>>>(d_C, d_A, d_B); …
cudaMemcpy(h_C_GPU, d_C, RESULT_SZ, cudaMemcpyDeviceToHost);
…
CUDA_SAFE_CALL( cudaFree(d_A) ); free(h_A); …
CUT_EXIT(argc, argv);
}
Przykład – iloczyn skalarny

Funkcja dla GPU (Kernel Function)
• Parametry:– d_C: wskaźnik do wyniku
(tj. tablicy)– d_A, d_B wskaźniki do
danych (tablic)
• Tablice lokalne:– t[]: wynkki8 pojedynczego
wątku– r[]: używane do dodawania
wyników segmentów• I: numer (Id) wątku w bloku
__global__ void ProdGPU(float *d_C, float *d_A, float *d_B){ __shared__ float t[THREAD_N]; __shared__ float r[SLICE_N]; const int I = threadIdx.x;
for(int vec_n=blockIdx.x; vec_n<VECTOR_N; vec_n+=gridDim.x){
int base = ELEMENT_N * vec_n;
for(int slice = 0; slice < SLICE_N; slice++, base += THREAD_N){
t[I] = d_A[base + I] * d_B[base + I]; __syncthreads();
for(int stride = THREAD_N / 2; stride > 0; stride /= 2){
if(I < stride) t[I] += t[stride + I]; __syncthreads();
}
if(I == 0) r[slice] = t[0];
}
for(int stride = SLICE_N / 2; stride > 0; stride /= 2){ if(I < stride) r[I] += r[stride + I]; __syncthreads(); }
if(I == 0) d_C[vec_n] = r[0];
}}
Przykład – iloczyn skalarny

Funkcja dla GPU
• Uruchamiane dla każdej pary wektorów wejściowych
• Zostanie uruchomione tylko raz, ponieważ:
Grid dimension == number of vectors
vector number = block Id
__global__ void ProdGPU(float *d_C, float *d_A, float *d_B){ __shared__ float t[THREAD_N]; __shared__ float r[SLICE_N]; const int I = threadIdx.x;
for(int vec_n=blockIdx.x; vec_n<VECTOR_N; vec_n+=gridDim.x){
int base = ELEMENT_N * vec_n;
for(int slice = 0; slice < SLICE_N; slice++, base += THREAD_N){
t[I] = d_A[base + I] * d_B[base + I]; __syncthreads();
for(int stride = THREAD_N / 2; stride > 0; stride /= 2){
if(I < stride) t[I] += t[stride + I]; __syncthreads();
}
if(I == 0) r[slice] = t[0];
}
for(int stride = SLICE_N / 2; stride > 0; stride /= 2){ if(I < stride) r[I] += r[stride + I]; __syncthreads(); }
if(I == 0) d_C[vec_n] = r[0];
}}
Przykład – iloczyn skalarny

Funkcja dla GPU
• Uruchamiane dla każdego segmentu wektorów wejściowych
• Każdy wątek wylicza jeden iloczyn i zapamiętuje go
__global__ void ProdGPU(float *d_C, float *d_A, float *d_B){ __shared__ float t[THREAD_N]; __shared__ float r[SLICE_N]; const int I = threadIdx.x;
for(int vec_n=blockIdx.x; vec_n<VECTOR_N; vec_n+=gridDim.x){
int base = ELEMENT_N * vec_n;
for(int slice = 0; slice < SLICE_N; slice++, base += THREAD_N){
t[I] = d_A[base + I] * d_B[base + I]; __syncthreads();
for(int stride = THREAD_N / 2; stride > 0; stride /= 2){
if(I < stride) t[I] += t[stride + I]; __syncthreads();
}
if(I == 0) r[slice] = t[0];
}
for(int stride = SLICE_N / 2; stride > 0; stride /= 2){ if(I < stride) r[I] += r[stride + I]; __syncthreads(); }
if(I == 0) d_C[vec_n] = r[0];
}}
Przykład – iloczyn skalarny

Funkcja dla GPU
• Wyliczenie wyniku częściowego dla segmentu
• Zapamiętanie wyniku częsciowego
__global__ void ProdGPU(float *d_C, float *d_A, float *d_B){ __shared__ float t[THREAD_N]; __shared__ float r[SLICE_N]; const int I = threadIdx.x;
for(int vec_n=blockIdx.x; vec_n<VECTOR_N; vec_n+=gridDim.x){
int base = ELEMENT_N * vec_n;
for(int slice = 0; slice < SLICE_N; slice++, base += THREAD_N){
t[I] = d_A[base + I] * d_B[base + I]; __syncthreads();
for(int stride = THREAD_N / 2; stride > 0; stride /= 2){
if(I < stride) t[I] += t[stride + I]; __syncthreads();
}
if(I == 0) r[slice] = t[0];
}
for(int stride = SLICE_N / 2; stride > 0; stride /= 2){ if(I < stride) r[I] += r[stride + I]; __syncthreads(); }
if(I == 0) d_C[vec_n] = r[0];
}}
t[0] += t[128]
t[1] += t[129] t[0] += t[64]
t[2] += t[130] t[1] += t[65] … t[0] += t[1]
… …
… t[64]+= t[127]
t[127]+= t[255]
Przykład – iloczyn skalarny

Funkcja dla GPU
• Dodanie wyników dla wszystkich segmentów
• Zapisanie wyniku w pamięci
__global__ void ProdGPU(float *d_C, float *d_A, float *d_B){ __shared__ float t[THREAD_N]; __shared__ float r[SLICE_N]; const int I = threadIdx.x;
for(int vec_n=blockIdx.x; vec_n<VECTOR_N; vec_n+=gridDim.x){
int base = ELEMENT_N * vec_n;
for(int slice = 0; slice < SLICE_N; slice++, base += THREAD_N){
t[I] = d_A[base + I] * d_B[base + I]; __syncthreads();
for(int stride = THREAD_N / 2; stride > 0; stride /= 2){
if(I < stride) t[I] += t[stride + I]; __syncthreads();
}
if(I == 0) r[slice] = t[0];
}
for(int stride = SLICE_N / 2; stride > 0; stride /= 2){ if(I < stride) r[I] += r[stride + I]; __syncthreads(); }
if(I == 0) d_C[vec_n] = r[0];
}}
Przykład – iloczyn skalarny