Crm Clase5

of 32
Transcript of Crm Clase5
-
8/17/2019 Crm Clase5
1/32
Dinámica
Facultad de Ciencias de la Electr´ onica
Benemérita Universidad Aut´ onoma de Puebla
Maestŕıa en Ciencias de la Electr´ onica, Opci´ on en Automatizaci´ on
Fernando Reyes Cortés
Control de Robots Manipuladores
ftp://ece.buap.mx/pub/profesor/FernandoReyes/crm/
Primavera 2016
-
8/17/2019 Crm Clase5
2/32
Introducci´ on Din´ amica d
Parte I
Din ámica de robots manipuladores
ContenidoIntroducci ónDinámica de robots manipuladores
Din ámica de Euler-Lagrange
Ecuaciones de movimiento de Euler-Lagrange
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
-
8/17/2019 Crm Clase5
3/32
Introducci´ on Din´ amica d
Un robot manipulador es un sistema mec´ anico muy complejo cuya descripci ón anaĺıtica requiere de ecuaciondiferenciales.
La naturaleza no lineal, multivariable y acoplada de su comportamiento din´ amico ofrece un amplio espectrola formulaci ón de problemas de control te´oricos y prácticos.
El modelo dinámico del robot manipulador permite explicar todos los fen´ omenos f́ısicos que se encuentran enestructura mec´anica, tales como efectos inerciales, fuerzas centŕıpetas y de Coriolis, par gravitacional y fricci´
La mecánica anaĺıtica representa la herramienta s´ olida de las ciencias exactas para formular modelos matem´ atde sistemas mecánicos, en este contexto la din´amica es la parte de la f́ısica que estudia la relaci´ on que existe e
las fuerzas que act úan sobre un cuerpo y el movimiento que en él se origina.
Modelado de la f́ısica como el de Newton o el de Hamilton, las ecuaciones de movimiento de Euler-Lagranrepresentan la mejor alternativa de modelado para robots manipuladores debido a las propiedades matem´ atque se deducen de manera natural usando esa metodoloǵıa. Este procedimiento facilita el an´ alisis y diseñoalgoritmos de control.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
-
8/17/2019 Crm Clase5
4/32
Introducci´ on Din´ amica d
La utilidad del modelo din ámico de robots manipuladores es fundamental para prop´ ositos de s imulaci´ on, disey construcci´ on del sistema mecánico , ası́ como a nálisis y dise˜ no de algoritmos de control .En el área de simulaci´ on el modelo dinámico es la parte clave debido a que puede reproducir todos los fen´ omef́ısicos del robot sin la necesidad de usar un robot real (realidad virtual), y esta caracteŕıstica resulta estratégicapara evaluar algoritmos de control, técnicas de planeaci´ on de trayectorias, programaci´ on de aplicaciones indusales, etc. La simulaci ón es el empleo del modelo dinámico para analizar y describir su comportamiento din´ amen un sistema electr ónico y de ah́ı inferir aplicaciones.No confundir la simulaci ón con animaci ón, son procesos diferentes; la animaci ón no requiere incorporar efecdinámicos en el movimiento del robot, generalmente son ecuaciones est´ aticas como la cinemática directa.Para dise ñar algoritmos de control de robots manipuladores es fundamental conocer el modelo din´ amico, sotodo cuando la técnica de dise˜no se basa en la estructura del modelo din´amico como lo es la teorı́a de estabilidde Lyapunov; en este caso las propiedades matem´ aticas del modelo din ámico son explotadas para facilitar
análisis y propuesta de nuevas estrategias de control.Otra de las ventajas que representa el modelo din´ amico es su empleo para diseñar y construir robots manipladores. Los robots industriales no se dise˜nan de manera emṕırica, existe un procedimiento cient́ıco para podediseñar y construir un robot industrial el cual se sustenta en la din´ amica del robot.Los esquemas y planos de ingenieŕıa de los eslabones son deducidos del modelo din´amico y trasladados a programa CAD para su maquinado mec´ anico. De esta forma, un robot industrial puede ser estudiado y pueden hacer las adecuaciones pertinentes antes de llegar a la etapa de construcci´ on f́ısica.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
-
8/17/2019 Crm Clase5
5/32
Introducci´ on Din´ amica d
dinámica
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
I t d i´ Di ´ i d
-
8/17/2019 Crm Clase5
6/32
Introducci on Din amica d
dinámica
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
7/32
Introducci on Din amica d
Ecuaciones de movimiento de Euler-Lagrange
La energı́a total E (hamiltoniano ) del robot manipulador est´ a dada por la suma de la energı́a cinética Kenerǵıa potencial U (q ):
E (q , q̇ ) = K(q , q̇ ) + U (q )donde q , q̇ ∈ IRn representan los vectores de posici ón y velocidad articular, respectivamente. Obsérvese que la ecinética K(q , ˙bfq ) tiene una dependencia de la posici´on y velocidad articular, mientras que la enerǵıa potenciaestá relacionada con el campo conservativo de la gravedad y por lo tanto ´ unicamente depende de la posici´onEl lagrangiano L(q , q̇ ) de un robot manipulador de n grados de libertad se dene como la diferencia entre lacinética K(q , q̇ ) y la energı́a potencial U (q ):
L(q , q̇ ) = K(q , q̇ ) − U (q ).
Las ecuaciones de movimiento de Euler-Lagrange de un robot manipulador de n grados de libertad est´an da
d dt
∂ L(q , q̇ )∂ q̇ −
∂ L(q , q̇ )∂ q
= τ −υ (q̇ , τ )donde q = [q 1, q 2, · · · , q n ]
T
∈ IRn representa el vector de posiciones articulares o coordenadas generaliza
q̇ = [q̇ 1, q̇ 2, · · · , q̇ n ]T
∈ IRn es el vector de velocidades articulares, τ = [τ 1, τ 2, · · · , τ n ]
T
∈ IRn es el vector de
aplicados, donde el i-ésimo par τ i se encuentra asociado con la i-ésima coordenada generalizada q i , y υ (q̇ , f e ) es el vector de fuerzas o pares de fricción que depende de la velocidad articular q̇ y de la fricción estática fse encuentra presente en las articulaciones del mismo; t ∈ IR+ representa el tiempo, n ∈ N es el número de gde libertad.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
8/32
Introducci on Din amica d
La enerǵıa cinética tiene una estructura matem´ atica cuadr´atica bien denida en funci´on de la velocidad articu
K(q , q̇ ) = 1
2 q̇ T M (q )q̇
M (q ) ∈ IRn × n
es la matriz de inercia del manipulador, y es una matriz denida positiva (por lo tanto simétrica)Por otro lado, la enerǵıa potencial U (q ) no tiene una forma espećıca. Sin embargo, tiene una dependencexclusivamente del vector de posici ón q , ya que se considera su presencia a campos conservativos como la fuede gravedad.las ecuaciones de movimiento de Euler-Lagrange pueden escribirse en forma compacta como:
∂ L(q , q̇ )∂ q̇
= ∂ ∂ q̇
12
q̇ T M (q )q̇ − ∂ U (q )
∂ q̇ = M (q )q̇ .
d dt
∂
L(q , q̇ )∂ q̇ = M (q )q̈ + Ṁ (q )q̇
∂ L(q , q̇ )∂ q
= ∂ ∂ q
12
q̇ T M (q )q̇ − ∂ U (q )
∂ q
τ = M (q )q̈ + Ṁ (q )q̇ − ∂ ∂ q
12
q̇ T M (q )q̇ + ∂ U (q )
∂ q + f f (q̇ , f e )
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
9/32
Introducci on Din amica d
Modelo din ámico
El modelo dinámico de un robot manipulador de n grados de libertad, formado con eslabones ŕıgidos conectados particulaciones libres de elasticidad en cadena cinem´ atica abierta.
τ = M (q )q̈ + C (q , q̇ )q̇ + g (q ) + f f (q̇ , f e )
q ∈ IRn es el vector de coordenadas generalizadas o posiciones articulares.q̇ ∈ IRn es el vector de velocidades articulares.q̈ ∈ IRn es el vector de aceleraciones articulares.M (q ) ∈ IRn × n es la matriz de inercia, la cual es simétrica y denida positiva.C (q , q̇ ) ∈ IRn × n es la matriz de fuerzas centŕıpetas y de Coriolis.
C (q , q̇ )q̇ = Ṁ (q )q̇
−
∂
∂ q
1
2 q̇ T M (q )q̇
g (q ) ∈ IRn es el vector de fuerzas o pares gravitacionales obtenido como el gradiente de la enerǵıa potencial, decir:g (q ) =
∂ U (q )∂ q
debida a la acci ón de la gravedad. f f (q̇ , f e )
∈ IRn es el vector de pares de fricción que incluye la fricción viscosa, de Coulomb y est ática ( f e
cada articulaci´on del robot.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Contr ol de Rob ot s Ma ni pul ador es MCEA- 20 800 Maes tŕı a en Ci enc ia s d e l a El ec tr ´ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
10/32
Fen ómenos f́ısicos y propiedades del modelo din´ amico
Efecto inercialEl efecto inercial representado por M (q )q̈ signica el cambio de estado de movimiento del robot manipulador.
El efecto inercial de un robot manipulador de n grados de libertad tiene las siguientes propiedades:
La matriz de inercia M (q ) ∈ IRn × n es una matriz simétrica, M (q ) = M (q )T , denida positiva M (q ) > 0. esto existe la matriz inversa M (q )− 1∈ IRn × n y también satisface que es una matriz simétrica M (q )− 1 = M (qy denida positiva M (q )− 1 > 0.En rob ótica una propiedad clave es la caracterı́stica distintiva de la matriz de inercia M (q ): es una matriz denpositiva. Esta propiedad se emplea mucho en el an´ alisis y diseño de esquemas de control. Su importancia raden que facilita la demostraci´on de unicidad y existencia del punto de equilibrio en la ecuaci´ on en lazo cerrintegrado por el modelo din ámico y el algoritmo de control.La matriz de inercia M (q ) satisface que
λ min M (q ) I ≤ M (q ) ≤ λ max M (q ) I donde I ∈ IRn × n es la matriz identidad, λmin M (q ) y λmax M (q ) representan los valores propios mı́nimo y m´ aximo dmatriz de inercia, respectivamente.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
11/32
El fenómeno inercial de un robot manipulador satisface que M (q )q̈ ≤ λmaxM (q ) q̈ ∀q ∈ IRn ; donde λmMrepresenta el valor propio m´aximo de la matriz de inercial.
Constante β del robot: para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe unconstante β > 0 tal que:
λ max M (q ) ≤ β ∀ q ∈ IRn Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante k M tal que:
M (x )z −M (y )z ≤ k M x −y z para todo vector x , y , z ∈ IRn .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
12/32
Fuerzas centŕıpetas y de CoriolisEl vector de fuerzas centŕıpetas y de Coriolis est´ an representadas por C (q̇ , q )q̇ . Las fuerzas centŕıpetas son fuerzradiales, teniendo un signo contrario a las fuerzas centrifugas. La fuerza de Coriolis representa una desviaci´ onmovimiento de traslaci´on debido a su componente de rotaci´on.
Las fuerzas centŕıpetas y de Coriolis tienen las siguientes propiedades:
La matriz de fuerzas centŕıpetas y de Coriolis C (q̇ , q ) ∈ IRn × n no es una matriz única, el vector C (q , q̇ )q̇ es.Cuando el vector de velocidades articulares es cero, la matriz de Coriolis satisface C (q , q̇ ) | q̇ = 0 = C (q , 0) = IRn × n para todo q ∈ IRn .Para todo vector q , x , y ∈ IRn se tiene que:
C (q , x )y = C (q , y )x .La matriz de fuerzas centŕıpetas y de Coriolis C (q , q̇ ) y la derivada con respecto al tiempo de la matriz de inerṀ (q ) satisfacen:
12
q̇ Ṁ (q ) −2C (q , q̇ ) q̇ ≡ 0Es decir, la matriz resultante Ṁ (q ) −2C (q , q̇ ) es una matriz antisimétrica. Recordar la propiedad x T Ask x entonces la matriz A sk ∈ IRn × n es antisimétrica, x ∈ IRn .La propiedad de antisimetŕıa facilita el dise˜ no y análisis de estabilidad cuya demostraci´ on para el problemacontrol de posici ón o regulación se reduce a tres sencillas fases. La estabilidad asint´ otica se obtiene emplenadteorema de LaSalle.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
13/32
Dinámica: fuerzas de Coriolis
dinámica din ámica
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
14/32
La derivada temporal de la matriz de inercia y la matriz de fuerzas centŕıpetas y de Coriolis satisfacen:
Ṁ (q ) = C (q , q̇ ) + C (q , q̇ )T .
Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante positiva k C 1que:
C (x , y )z ≤ k C 1 y z .para todo x , y , z ∈ IRn .Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existen constantes k C 1 y k C 2 tales q
C (x , z )w −C (y , v )w ≤ k C 1 z −v w + k C 2 x −y w z para todo vector v , x , y , z , w ∈ IRn .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
15/32
Par gravitacional
Las propiedades del par gravitacional son:
Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante k g > 0 tal q
k g ≥∂ g (q )
∂ q ∀ q ∈ IR,
g (x ) −g (y ) ≤ k g x −y ∀ x , y ∈ IRn .La constante k g se puede calcular como
k g ≥ n máx i , j ,q ∂ g i (q )
∂ q j
donde g i (q ) es el i –ésimo elemento del vector g (q ).Para el caso de robots provistos ´unicamente de articulaciones rotacionales existe una constante k tal que:
g (q ) ≤ k ∀q ∈ IRn .El vector de pares gravitacionales g (q ) y de velocidad articular q̇ satisfacen
t 0 g (q (σ))T q̇ (σ)d σ = U (q (t )) − U (0).
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
16/32
Fen ómeno de fricci ón
El fenómeno de fricción tiene el efecto f́ısico de oponerse al movimiento del robot, su caracteŕıstica principal es ufenómeno disipativo en velocidades diferentes a cero y con entradas acotadas dentro del primer y tercer cuadrantelo que permite considerar los modelos tradicionales de fricci´on viscosa y de Coulomb, para modelarlos como u
combinaci ón lineal de la fricción viscosa, Coulomb y est ática. La caracteŕıstica disipativa de la fricci´ on signica convierte la energı́a mec´anica en energı́a térmica.
El fenómeno de fricción es disipativo, esto signica que la enerǵıa mec´anica se transforma en energı́a térmica, es decsatisface q̇ T f f (q̇ ) > 0. El aspecto disipativo se traduce como desgaste y envejecimiento en las partes mec´ anicasrobot. Sin embargo, el fen ómeno de fricción ayuda a generar la regi ón de atracci ón para puntos de equilibrio establ
f f (q̇ , f e ) = B q̇ + F c signo( q̇ ) +[1 − | signo( q̇ 1 )| ] 0 · · · 0
0 [1 − | signo( q̇ 2 )| ] · · · 0
0 0 · · ·...
0 0 · · · [1 − | signo( q̇ n )| ]
f e
donde B , F c ∈ IRn × n son matrices diagonales de coecientes de fricci ón viscosa y de Coulomb, respectivamente. fricción estática f e está representada por f e = f e 1, f e 2, · · · , f en
T que es el vector de fricción estática que contienecoecientes de fricción estática de cado uno de los servomotores del robot manipulador.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
17/32
Cuando la velocidad es cero, únicamente est´a presente la fricci ón estática satisfaciendo:
f i (0, τ i ) = τ i −g i (q ), para − f ei ≤ τ i −g i (q ) ≤ f ei , donde f ei es el ĺımite del par de fricción estática para la i -ésima articulaci´ on.La función signo de la velocidad, signo( q̇ ), est á dada por:
signo( q̇ ) =
signo(q̇ 1)signo(q̇ 2)
...signo(q̇ n )
signo(q̇ i ) =1 si q̇ i > 00 si q̇ i = 0
−1 si q̇ i < 0
La fricción viscosa satisface lo siguiente:
B q̇
≤ B q̇
≤ λ max B
q̇
donde λmax B es el valor propio máximo de la matriz de coecientes de fricci ón voscosa B ∈ IRn × n .La fricción de Coulomb satisface lo siguiente:
F c signo( q̇ ) ≤ F c √ n ≤ λ max F c √ n donde λmax F c es el valor propio máximo de la matriz de coecientes de fricci ón de Coulomb F c ∈ IRn × n , n es número de gdl del robot.Otra forma de denir a la funci´on signo es la siguiente: signo:IR
→ {−1, 0, 1
} es denida como: signo(x ) =
si x = 0, signo (() 0) = 0 si x = 0, limx →0+ signo(0) = 1 = 0; la funci ón signo es discontinua en cero.Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
18/32
Linealidad en los par´ametrosLos robots manipuladores pertenecen a una clase de sistemas mec´ anicos no lineales con una estructura din´ amica bdenida. El modelo din ámico de un robot manipulador de n grados de libertad presenta la propiedad de linealidacon respecto a los par ámetros del robot que dependen de masas, momentos de inercias, centros de masa y coecientde fricción.
d dt
∂ φ L (q , q̇ )∂ q̇ −
∂ φ L (q , q̇ )∂ q
θ E = τ − f (q̇ ) .
Debido a que la fuerza de fricción presente en el robot es modelada como fricci ón de Coulomb y viscosa, entoncefricción es lineal con respecto a los coecientes de fricción, es decir:
f (q̇ ) = φF (q̇ )θ F
donde φF es una matriz de orden n ×2n y θ F es un vector de 2n ×1, el cual contiene los coecientes de friccioCoulomb. Por lo que la ecuaci ón toma la forma: d dt
∂ φ L (q , q̇ )∂ q̇ −
∂ φ L (q , q̇ )∂ q φF (q̇ )
Y (q , q̇ ,q̈ )θ = τ
donde
θ = [θ T E θT F ]
T
denota el vector de par´ametros din ámicos y de fricción del robot manipulador.Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
19/32
Linealidad en los par´ ametrosPropiedad fundamental de linealidad en los par´ ametros del modelo din ámico del robot manipulador:
M (q )q̈ + C (q , q̇ )q̇ + g (q ) + f (q̇ ) = Y (q , q̇ , q̈ )θ = τ
donde Y (q , q̇ , q̈ ) es una matriz n ×p de funciones conocidas, θ es el vector p ×1 que contiene los par metrosrobot y
p =
p1 +
p2 + 2
n .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
20/32
Modelo de enerǵıa
La enerǵıa del robot es la integral de la potencia del robot q̇ T τ sobre el intervalo de tiempo [0 , t ]. La enehamiltoniana H(q , q̇ ) del robot manipulador est´ a dada por la suma de la energı́a cinética K(q , q̇ ) más la enepotencial
U (q ):
H(q , q̇ ) = K(q , q̇ ) + U (q ).El modelo de energı́a del robot se basa en el principio de la conservaci´on de la energı́a, el cual establece que el trabefectuado por la fuerzas aplicadas a un sistema es igual al cambio de enerǵıa total del sistema:
t
0
q̇ T (σ)τ (σ)d σ
energı́a aplicada (t)=
H(q (t ), q̇ (t ))
− H(q (0), q̇ (0))
energı́a almacenada (t)+
t
0
q̇ T (σ) f f (σ))d σ
energı́a disipada (t)=
12
q̇ T (t )M (q (t )) q̇ (t ) + U (q (t )) − 12
q̇ T (0)M (q (0)) q̇ (0)
−U (q (0)) + t
0q̇ T (σ) f f (σ))d σ
donde q (0) , q̇ (0) son las condiciones iniciales de la posición y velocidad articular, respectivamente.
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
21/32
La propiedad de pasividad signica que existe una constante β ≥ 0 tal que:
t
0q̇ T (σ)τ (σ)d σ = H(q (t ), q̇ (t )) − H(q (0) , q̇ (0)) ≥ −β ∀t > 0
entonces la enerǵıa H(t ) no es negativa, por lo tanto H(0) = β .
Pasividad es un concepto que se emplea en circuitos eléctricos, por ejemplo un circuito es pasivo si sus componentson resistencias, capacitancias, bobinas, etc.Por analoǵıa en rob´otica pasividad signica que el robot puede ser analizado como si estuviera formado elementos pasivos como masas, resortes, y amortiguadores.La interpretaci´on fı́sica de pasividad es que la cantidad de enerǵıa disipada por el robot tiene una cota dada po
−β .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
22/32
Modelo de potencia
La potencia aplicada al robot manipulador es la variaci´ on temporal de la enerǵıa total y puede ser obtenida empleandlas ecuaciones de movimiento de Euler-Lagrange de la siguiente forma:
q̇ T τ = q̇ T d dt
∂ L(q , q̇ )∂ q̇ − L
(q , q̇ )∂ q
+ q̇ T f (q̇ )
= d
dt H(q , q̇ ) + q̇ T f f (q̇ , f e )
= q̇ T
M (q )q̈ +
1
2 q̇ T ˙
M (q )q̇ + {∇U (q )}T
q̇ + q̇ T
f f (q̇ , f e )
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
23/32
Metodoloǵıa para obtener el modelo din´ amico
Paso 1Obtener la cinem ática directa del centro de masa de cada uno de los eslabones. Para el i -ésimo eslab ón tomarcuenta la longitudes anteriores l i − 1 y ángulos q i y q i − 1 :
x i y i z i
= f R (l i , l i − 1, l ci , q i − 1, q i )
Paso 2Calcular la cinem ática diferencial del i -ésimo eslab ón y deducir la rapidez lineal:
v i = d
dt
x i y i z i
La rapidez lineal del centro de masa de cada eslab´on se calcula de la siguiente forma:v T i v i = ẋ 2i + ẏ 2i + ż 2i .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
24/32
Metodoloǵıa para obtener el modelo din´ amico
Paso 3:obtener el modelo energı́a:
H(q , q̇ ) = K(q , q̇ ) + U (q )La energı́a cinética K(q , q̇ ) incluye el movimiento de traslaci´on y rotaci ón, por ejemplo: Ki (q i , q̇ i ) = 12 m i v T i v12 I i [Σ
n i q̇ i ]
2, donde I i es el momento de inercia del i -ésimo eslab ón.La enerǵıa potencial U (q ) no tiene una forma espećıca como en el caso de la enerǵıa cinética, depende de geometrı́a del robot en general U i (q ) = m i gl ci h i (q ), siendo h i (q ) una funci ón que indica la altura del eslab´on respecto al origen del sistema de referencia del robot.Obtener el lagrangiano:
L(q , q̇ ) =
K(q , q̇ )
− U (q ).
Paso 4:Paso 4: aplicar las ecuaciones de movimiento de Euler-Lagrange e incluir el modelo de fricci ón.
τ i = d
dt ∂ L(q , q̇ )
∂ q̇ i − ∂ L(q , q̇ )
∂ q i + bi q̇ i +
f ci signo(q̇ i ) + f ei 1 − |signo(q̇ i )|
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
25/32
Centŕıfuga
EjemploCentŕıfuga
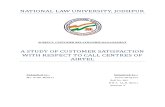
Obtener el modelo dinámico de una centŕıfuga: este sistema mecatr´onico es la base del electrodomésticoconocido como lavadora está compuesto por un servomotor con un ´angulo de rotaci ón q con respecto al eje
z el cual está alineado con el eje de giro. El plano xy está determinado por la regla de la mano derecha. Ladistancia del origen del sistema de referencia cartesiano al extremo nal del rotor es l 1. Una varilla de longitudl 2 se encuentra soldada a la parte nal de la echa del rotor y mantiene un ´ angulo de inclinaci ón constante ϕcon respecto a la horizontal (eje y ), l c 2 representa el centro de masa de la varilla. El movimiento rotatorio de lacentrı́fuga describe un cı́rculo sobre el plano xy . La acción de la gravedad g se encuentra en direcci ón contrariaal eje z .
:
Figura 1: Centŕıfuga.Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
26/32
Paso 1: el modelo de cinemática directa está dado por la siguiente ecuaci´on:
x y z
=l 2 cos(ϕ) cos(q )l 2 cos(ϕ) sen(q )l 1 + l 2 sen(ϕ)
Paso 2: la cinemática diferencial se encuentra dada por:
v = d
dt
x y z
= −l c 2 cos(ϕ) sen(q )
l c 2 cos(ϕ)cos(q )0
q̇
v T v = −l c 2 cos(ϕ) sen(q )q̇ 2 + l c 2 cos(ϕ) cos(q )q̇
2 = l 2c 2 cos2(ϕ)q̇ 2
Se toma el centro de masa l c 2 como punto de referencia para nalidades del an´ alisis dinámico. Por esto, substituida la longitud l por el centro de masa l c .Paso 3: el modelo de energı́a est á determinado por la energı́a cinética y potencial
K(q , q̇ ) = 1
2m v T v +
12
I q̇ 2
= 1
2ml 2c 2 cos(ϕ)2 + I q̇
2
U (q ) = mgz = mg l 1 + l c 2sen (ϕ) El lagrangiano de la centŕıfuga est´a dado por
L(q , q̇ ) = K(q , q̇ ) − U (q ) = 12 ml 2c 2 cos(ϕ)2 + I q̇ 2 −mg l 1 + l c 2sen (ϕ) Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
27/32
Paso 4: las ecuaciones de movimiento de Euler-Lagrange para el caso particular de la centŕıfuga, adquieren la fecuación escalar con la siguiente estructura:
τ = d
dt
∂ L(q , q̇ )∂ q̇ −
∂ L(q , q̇ )∂ q
+ f f ( f e , q̇ )
tomando en cuenta el lagrangiano de la centŕıfuga se tienen las siguientes expresiones:
∂ L(q , q̇ )∂ q̇
= ml 2c 2 cos(ϕ) + I q̇
d dt
∂ L(q , q̇ )∂ q̇
= ml 2c 2 sen(ϕ) + I q̈
∂
L(q , q̇ )∂ q = 0
Obsérvese que g (q ) = ∂ U (q )∂ q = 0, debido a que la centŕıfuga describe un cı́rculo sobre el plano horizontal xque la enerǵıa potencial es una constante. El modelo din´ amico de una centŕıfuga incluyendo el fen´omeno deestá dado por:
τ = ml 2c 2 sen(ϕ) + I q̈ + bq̇ + f c signo(q̇ ) + f e [1− |signo(q̇ )|]
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
28/32
Péndulo robot
EjemploPéndulo robot
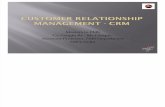
Un péndulo simple est´a formado por un servomotor y una barra met´ alica de longitud l . El sistema de referencia elige de tal forma que el eje z coincida con el eje de rotación del servo (es decir, en este caso perpendicular al pla
de la hoja) y el plano xy queda determinado por la regla de la mano derecha. La acci´ on de la gravedad g estádirigida en direcci ón del eje y negativo. El momento de inercia se denota por I , el centro de masa se representacomo l c y la masa del péndulo por m .
:
Figura 2: Péndulo-robot .Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
29/32
Paso 1: modelo de cinemática directa con respecto al centro de masa del péndulo-robot:
x y =
l c sen(q )
−l c cos(q )
La posición de casa fue tomada sobre el eje y negativo.Paso 2: modelo de cinemática diferencial:
v = d
dt x y =
l c cos(q )q̇ l c sen(q )q̇
La rapidez de traslaci´on está dada como v = ẋ , ẏ T . Obsérvese que v T v = v 2 = l 2c q̇ 2.Paso 3: la enerǵıa del péndulo est´ a compuesta de la enerǵıa cinética
K(q , q̇ ) y de la energı́a potencial
U (q ).
La enerǵıa cinética toma la siguiente forma:
K(q , q̇ ) = 1
2m v T v +
12
I q̇ 2
= 1
2ml 2c + I q̇ 2
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
30/32
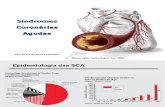
Por otro lado, la energı́a potencial U (q ) tiene la siguiente forma: U (q ) = mgh , donde h = h 1 −h 2 = −l c col c 1 −cos(q ) :
:
Figura 3: Desplazamiento del centro de masa l c del péndulo.
U (q ) = mgl c h = mgl c 1 −cos(q )El lagrangiano para el caso del péndulo est´ a dado por
L(q , q̇ ) = K(q , q̇ ) − U (q ) 12
ml 2c + I q̇ 2 −mgl c 1 −cos(q )Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
31/32
Paso 4: las ecuaciones de movimiento de Euler-Lagrange est´an dadas por la ecuaci ón 1, para el caso particularobot adquieren la forma de una ecuaci´on escalar con la siguiente estructura:
τ = d
dt
∂ L(q , q̇ )∂ q̇ −
∂ L(q , q̇ )∂ q
+ f f ( f e , q̇ )
Tomando en cuenta el lagrangiano se tienen las siguientes expresiones:
∂ L(q , q̇ )∂ q̇
= ml 2c + I q̇
d dt
∂ L(q , q̇ )∂ q̇
= ml 2c + I q̈
∂
L(q , q̇ )∂ q = mgl c sen(q )
Por lo tanto el modelo din ámico de un péndulo-robot incluyendo el fen´ omeno de fricción está dado por:
τ = ml 2c + I q̈ + mgl c sen(q ) + bq̇ + f c signo(q̇ ) + f e [1− |signo(q̇ )|]
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on
Introducci´ on Din´ amica d
-
8/17/2019 Crm Clase5
32/32
TareaDemostrar las siguientes propiedades matem´ aticas de la din ámica de un robot manipulador:
a). La matriz de inercia M (q ) satisface que
λ min M (q ) I ≤ M (q ) ≤ λ max M (q ) I b). Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante β > 0 tal qu
λ max M (q ) ≤ β ∀ q ∈ IRn c). Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante k M tal que:
M (x )z −M (y )z ≤ k M x −y z para todo vector x , y , z ∈ IRn .
d). Para el caso de robots provistos ´unicamente de articulaciones rotacionales, existe una constante k g > 0 tal q
g (x ) −g (y ) ≤ k g x −y ∀ x , y ∈ IRn .
Fernando Reyes Cortés Benemérita Universidad Aut´ onoma de Puebla Facultad de Ciencias deDi ńami ca Cont ro l d e Ro bo ts Ma ni pul ador es MCEA- 20 800 Ma es tŕı a en Ci enci as de l a El ect ŕ onica, Opci´ on en Automatizaci´ on