Co to sa równania ruchu? Jak je calkowac?dydaktyka.fizyka.umk.pl/Pliki/M.Przybylska.pdfRuch ciała...
29
Co to są równania ruchu? Jak je calkować? Maria Przybylska CA UMK 10.03.2010 M. Przybylska (CA UMK) Ruch i calki 10.03.2010 1 / 29
-
Upload
nguyenkien -
Category
Documents
-
view
214 -
download
0
Transcript of Co to sa równania ruchu? Jak je calkowac?dydaktyka.fizyka.umk.pl/Pliki/M.Przybylska.pdfRuch ciała...

Co to są równania ruchu? Jak je całkować?
Maria Przybylska
CA UMK
10.03.2010
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 1 / 29

Ruch ciała i jego opis
Problemy
co to jest ruch: zmiana położenia ciała względem pewnego układuodniesienia
jak przewidywać zmiany położenia ciała w czasie,
równania ruch jako infinitezymalny przepis na zmianę położenia wnieskończenie krótkim przedziale czasu,
jak przewidywać położenie ciała w skończonym przedziale czasu –całkowanie równań ruch
co robić gdy równań nie można scałkować – analiza jakościowarównań ruchu.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 2 / 29

Wielkości opisujące ruchpołożenie – punkt w R3 scharakteryzowanywektorem wodzącym r = (x , y , z)tor – krzywa zadana w sposób parametryczny
x = x(t), y = y(t), z = z(t)
prędkość
v(t) = lim∆t→0
r(t + ∆t)− r(t)∆t
=drdt
przyspieszenie
a(t) = lim∆t→0
v(t + ∆t)− v(t)∆t
=dvdt
=d2rdt2
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 3 / 29
Sir Isaac Newtonzainteresowania: filozofia naturalna(fizyka), matematyka, astronomia,filozofia, alchemia, teologia chrześcijańska
matematyka: rachunek różniczkowy icałkowy (walka o pierwszeństwo zLeibnizem), uogólnienie wzorubinomialnego na potęgi rzeczywiste,metoda Newtona znajdowaniaprzybliżonych zer funkcji, badaniewłasności szeregów,
fizyka: 3 prawa ruch, prawo powszechnejgrawitacji, zgodność praw Keplera zprawem powszechnego ciążenia,konstrukcja teleskopu refrakcyjnego, teoriaświatła i kolorów, pomiar prędkościdźwięku.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 4 / 29

Prawa ruchu – zasady dynamiki Newtona1 Jeśli na ciało nie działa żadna siła lub siły
działające równoważą się, to ciało pozostajew spoczynku lub porusza się ruchemjednostajnym prostoliniowym.“Każde ciało trwa w swym stanie spoczynkulub ruchu prostoliniowego jednostajnego,jeżeli siły przyłożone nie zmuszą ciała dozmiany tego stanu”
2 Jeśli na ciało działa siła F, to ciało poruszasię z przyspieszeniem a wprostproporcjonalnym do działającej siły F, aodwrotnie proporcjonalnym do masy ciała m.“Zmiana ruchu jest proporcjonalna doprzyłożonej siły poruszającej i odbywa się wkierunku prostej, wzdłuż której siła jestprzyłożona.”
ma = F
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 5 / 29
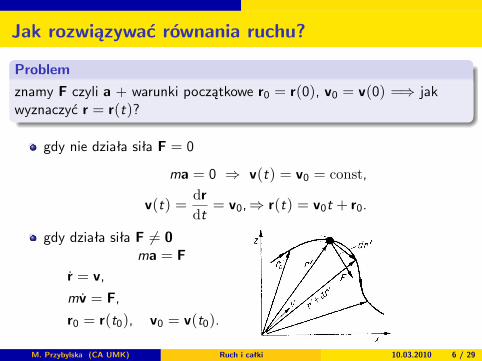
Jak rozwiązywać równania ruchu?
Problem
znamy F czyli a + warunki początkowe r0 = r(0), v0 = v(0) =⇒ jakwyznaczyć r = r(t)?
gdy nie działa siła F = 0
ma = 0 ⇒ v(t) = v0 = const,
v(t) =drdt
= v0,⇒ r(t) = v0t + r0.
gdy działa siła F 6= 0ma = F
r = v,
mv = F,
r0 = r(t0), v0 = v(t0).
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 6 / 29
Inne równania ruchu
Układy dynamiczne
xi = vi (x1, . . . , xn), i = 1, . . . , n
xi – wielkości charakteryzująceukład, np. współrzędne xi i składoweprędkości vi = xi .
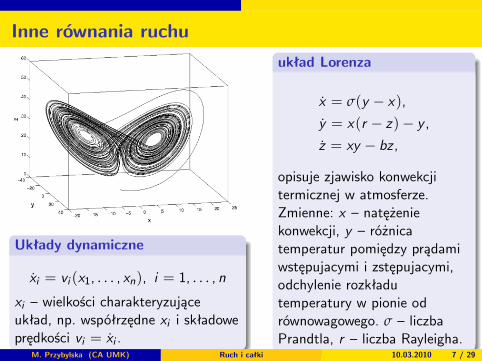
układ Lorenza
x = σ(y − x),y = x(r − z)− y ,z = xy − bz ,
opisuje zjawisko konwekcjitermicznej w atmosferze.Zmienne: x – natężeniekonwekcji, y – różnicatemperatur pomiędzy prądamiwstępujacymi i zstępujacymi,odchylenie rozkładutemperatury w pionie odrównowagowego. σ – liczbaPrandtla, r – liczba Rayleigha.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 7 / 29

Pytania, pytania ...
1 co oznacza znaleźć rozwiązania lub scałkować równania ruchu?2 rozwiązania w jakiej klasie funkcji?3 czy można w ścisły sposób odróżnić układy rozwiązalne od
nierozwiązalnych?4 jak dowodzić nierozwiązalności?5 jak odróżnić układy rozwiązalne od nierozwiązalnych bez znajdowania
jawnej postaci rozwiązań?6 czy istnieją wielkości, których obecność pociąga za sobą rozwiązalność
równań ruchu? Ich obecność wyznacza trajektorię w niejawny sposób.7 jak szukać takich wielkości,8 jak dowieść, że takich wielkości nie ma?
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 8 / 29
Całkowalność w kwadraturach – Newton, Poincare
Zapisane rozwiązania ogólnego przy pomocy skończonej liczbynastępujących po sobie operacji
działań algebraicznych (dodawanie, odejmowanie, mnożenie, dzielenie,rozwiązywanie równań algebraicznych (wyciąganie pierwiastków)
kwadratur czyli wyznaczanie funkcji pierwotnych (całeknieoznaczonych)
odwracanie funkcji
na zbiorze funkcji elementarnych.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 9 / 29
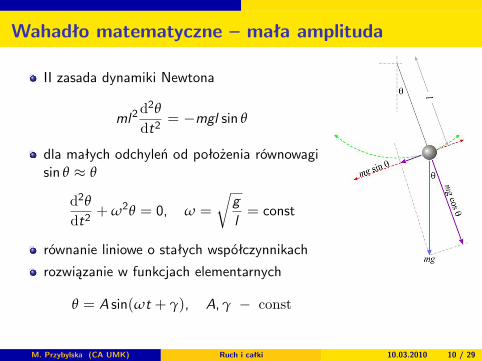
Wahadło matematyczne – mała amplituda
II zasada dynamiki Newtona
ml2d2θdt2
= −mgl sin θ
dla małych odchyleń od położenia równowagisin θ ≈ θ
d2θdt2
+ ω2θ = 0, ω =√gl
= const
równanie liniowe o stałych współczynnikach
rozwiązanie w funkcjach elementarnych
θ = A sin(ωt + γ), A, γ − const
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 10 / 29

Wahadło matematyczne – dowolna amplitudad2ϕdt2
+ ω2 sin ϕ = 0.
O użyteczności całki energii
h =12
ϕ2 −ω2 cos ϕ =12
ϕ20 −ω2 cos ϕ0
I do jakościowego zrozumieniadynamiki.Oznaczenie: Π = −ω2 cos ϕ
I do scałkowania równań ruchudϕ√
2(h+ ω2 cos ϕ)= dt, ⇒
∫ dϕ√2(h+ ω2 cos ϕ)
= t
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 11 / 29

Wahadło matematyczne – dowolna amplituda
d2θdt2
+ ω2 sin θ = 0.
Rozwiązania są znane i wyrażają się złożonymi funkcjami specjalnymprzypadek oscylacyjny gdy kąt zmienia się w pewnych granicachθ ∈ [−θmax, θmax]
θ = 2 arc sin[h sn ω(t − t0)]sn(·) – funkcja eliptyczna Jacobiego (sinus amplitudy)przypadek ruchu pełzajacego, ruch po separatrysie
θ = 4 arc tg exp[ω(t − t0)]− π
gdy θ → π, to t → ∞,przypadek rotacyjny, k = θ0/(2ω)
θ = 2 am[
θ02
(t − t0)]
, θ0(t − t0) = 2∫ θ/2
0
du√1− 1
k2 sin2(u)M. Przybylska (CA UMK) Ruch i całki 10.03.2010 12 / 29

Całkowalność a prawa zachowaniaukład dynamiczny
xi = vi (x1, . . . , xn), i = 1, . . . , n
Co to są całki pierwsze i ich własności
Całki pierwsze to funkcje zależne od zmiennych opisujacych układ:I = I (x1, . . . , xn), które pozostają stałe w trakcie dynamiki układu.
I (x1, . . . , xn) = I (x1(t0), . . . , xn(t0))
Przykłady: energia, pęd, moment pędu, ...
Kryterium infinitezymalne:dI (x1, . . . , xn)
dt:=
n
∑i=1
∂I∂x iv i = 0,
Istnienie n− 1 (funkcjonalnie) niezależnych całek pierwszychimplikuje całkowalność w kwadraturach
Wniosek: Układ posiadający n− 1 (funkcjonalnie) niezależnych całekpierwszych jest całkowalny.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 13 / 29

Równania Eulera
ΠΠΠ + ΩΩΩ×ΠΠΠ = 0,
ΠΠΠ = IΩΩΩ
I = diag(I1, I2, I3)– tensor bezwładności
I1 = Π21 + Π22 + Π23 = 〈ΠΠΠ,ΠΠΠ〉,
H =12
(Π21I1
+Π22I2
+Π23I3
)=
12〈ΠΠΠ, I−1ΠΠΠ〉
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 14 / 29

Zagadnienie dwóch ciał – redukcja
dwa punkty materialne 1 i 2 o masach m1 (np. Słońce) i m2 (np. Ziemia)o promieniach wodzących x1, x2 oddziałujace grawitacyjnie
F1,2 = −F2,1 =Gm1m2r2
rr
gdzie r = x2 − x1 i r = |r|. Układ posiada środek masy (wektor wodzacyR) i jeśli nie działają na niego żadne siły zewnętrzne to na mocy I prawadynamiki porusza się ruchem jednostajnym prostoliniowym lub pozostaje wspoczynku:
R(t) = R0 + R0(t − t0), R =m1x1 +m2x2m1 +m2
,
gdzie R0 = R(t0) i R0 = R(t0).Równania ruchu
m1x1 =Gm1m2r2
rr, m2x2 =
Gm1m2r2
rr
µr = −Gm1m2r2
rr, µ =
m1m2m1 +m2
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 15 / 29

Zagadnienie dwóch ciał – redukcja
Jeśli rozwiążemy problem zredukowany, to mamy rozwiązanie wyjściowegoukładu bo
x1(t) = R(t)− µ
m1r(t), x2(t) = R(t) +
µ
m1r(t).
Korzystamy z zasady zachowania momentu pędu
c = r× µv, v = r, r · c = 0
czyli ruch względny jest płaski. Przechodzimy do współrzędnychbiegunowych o początku w punkcie o masie m1 i położenie masy m2 jestwyznaczone przez r i θ. W tych współrzędnych dwie całki ruch mająpostać
c = µr2 ϕ, h =12
µr2 − Gm1m2r
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 16 / 29
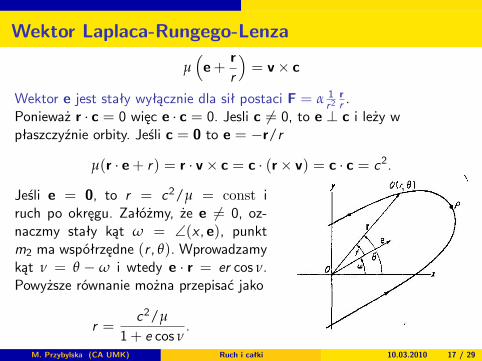
Wektor Laplaca-Rungego-Lenza
µ(
e +rr
)= v× c
Wektor e jest stały wyłącznie dla sił postaci F = α 1r2rr .
Ponieważ r · c = 0 więc e · c = 0. Jesli c 6= 0, to e ⊥ c i leży wpłaszczyźnie orbity. Jeśli c = 0 to e = −r/r
µ(r · e + r) = r · v× c = c · (r× v) = c · c = c2.
Jeśli e = 0, to r = c2/µ = const iruch po okręgu. Załóżmy, że e 6= 0, oz-naczmy stały kąt ω = ∠(x , e), punktm2 ma współrzędne (r , θ). Wprowadzamykąt ν = θ − ω i wtedy e · r = er cos ν.Powyższe równanie można przepisać jako
r =c2/µ
1 + e cos ν.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 17 / 29

Zagadnienie dwóch ciał – Rodzaje orbit
r =p
1 + e cos ν, p =
c2
µ.
0 < e < 1 – elipsa
e = 1 – parabola
e > 1 – hiperbola
Siedem wielkości skalarnych zachowywanych w trakcie ewolucji: składowec i e oraz energia h ale tylko pięć spośród nich jest funkcjonalnieniezależnych.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 18 / 29

Zagadnienie N ciał
n mas punktowych mi posiadających wektory wodzące xi ∈ R3oddziałujących grawitacyjnie
mi xi =N
∑j=1,j 6=i
Gmimj (xj − xi )|xi − xj |3
=∂U∂xi
, U = ∑1i<jN
Gmimj|xi − xj |
Potrzebnych 6N − 1 całek pierwszych a znanych jest tylko 7:1 3 składowe całkowitego pędu L = ∑ni=1mivi ,2 3 składowe całkowitego momentu pędu L = ∑Ni=1 xi ×mivi ,3 energia całkowita h = miv2i /2 + U,4 odseparowanie ruchu środka masy redukujące wymiar problemu.
Już zagadnienie 3 ciał jest niecałkowalne!
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 19 / 29
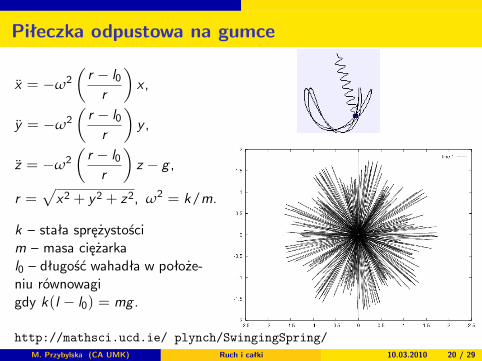
Piłeczka odpustowa na gumce
x = −ω2(r − l0r
)x ,
y = −ω2(r − l0r
)y ,
z = −ω2(r − l0r
)z − g ,
r =√x2 + y2 + z2, ω2 = k/m.
k – stała sprężystościm – masa ciężarkal0 – długość wahadła w położe-niu równowagigdy k(l − l0) = mg .
http://mathsci.ucd.ie/ plynch/SwingingSpring/M. Przybylska (CA UMK) Ruch i całki 10.03.2010 20 / 29

Jak zobaczyć niecałkowalność – cięcie Poincare
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 21 / 29
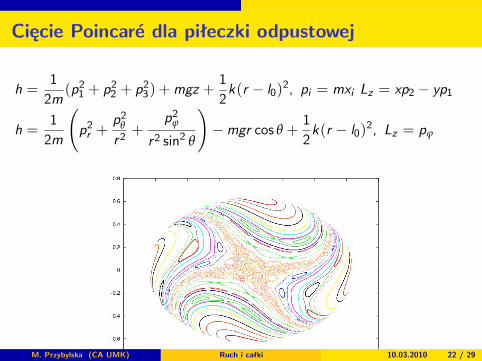
Cięcie Poincare dla piłeczki odpustowej
h =1
2m(p21 + p22 + p23) +mgz +
12k(r − l0)2, pi = mxi Lz = xp2 − yp1
h =1
2m
(p2r +
p2θr2
+p2ϕr2 sin2 θ
)−mgr cos θ +
12k(r − l0)2, Lz = pϕ
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 22 / 29

Jak ściśle dowodzić niecałkowalności? – równaniawariacyjne
Główna ideaInformacja o zachowaniu rozwiązań układu nieliniowego wokół pewnegorozwiązania szczególnego są zawarte w równaniach wariacyjnych.
W układziex = v(x), x = (x1, . . . xn)T ,
ze znanym rozwiązaniem szczególnym ϕ(t) dokonujemy podstawieniax = ϕ(t) + ξ
Równania wariacyjne
ddt
ξ = A(t)ξ, A(t) =∂v∂x
(ϕ(t)).
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 23 / 29
Algebraiczna teoria Galois
I Problem jak wyrazić pierwiastki wielomianu
a0xn + a1xn−1 + · · ·+ an−1x + an = 0, a0 6= 0, ai ∈ R,
przy pomocy ai używając tylko operacji algebraicznych: dodawania,odejmowania, mnożenia, dzielenia i rozwiązywania równań algebraicznychczyli czy równanie jest rozwiązalne przez pierwiastniki
n = 1, x = −a1a0
,
n = 2, x2 + px + q =(x +p2
)2=p2
4− q, p =
ba, q =
ca
x1,2 = −p2±√p2
4− q =
−b±√b2 − 4ac
2a,
n = 3 – Cardano
n = 4 – Ferrari.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 24 / 29
Całkowalność a różniczkowa teoria Galois
istnieje odpowiednik algebraicznej toerii Galois dla równańróżniczkowych liniowych (o niestałych współczynnikach) – tzw.różniczkowa teoria Galois,
przy pomocy tej teorii sprawdza się rozwiązalność równań liniowych.Można znaleźć nowe układy rozwiązalne,
można wyrazić warunki konieczne całkowalności nieliniowego układudynamicznego przy pomocy różniczkowej grupy Galois równańwariacyjnych,
uzyskane warunki są możliwe do sprawdzenia,
udowodniono niecałkowalność wielu układów a także znaleziono kilkanowych nieznanych układów całkowalnych.
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 25 / 29
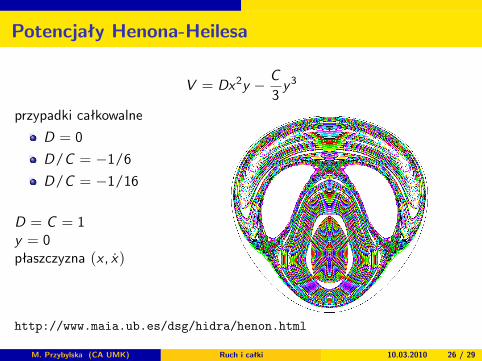
Potencjały Henona-Heilesa
V = Dx2y − C3y3
przypadki całkowalne
D = 0
D/C = −1/6
D/C = −1/16
D = C = 1y = 0płaszczyzna (x , x)
http://www.maia.ub.es/dsg/hidra/henon.html
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 26 / 29

O pewnym jednorodnym potencjale
V10 =4√
2q313
+5q1q222√
2+ q22q3 +
13q33
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 27 / 29

I1 = 12p42 − 27q62 − 18q42(q21 − 4
√2q1q3 + 2q23) + 4(6p21 − 3p23
+ 16√
2q31 − 2q33)(3p23 + 2q33) + 12q22(3p23(√
2q1 − 4q3)
+ 12p1p3(q1 +√
2q3)− 2q23(12q21 +√
2q1q3 + 2q23))
− 12p2q2(2p3(16q21 + 3q22 + 8√
2q1q3 − 4q23) + 3√
2p1(q22 + 4q23))
− 12p22(2p3(2√
2p1 + p3)− 4(q2 − q3)q3(q2 + q3)−√
2q1(5q22 + 8q23)),
I2 = 81q82(2√
2q1 + q3) + 216p2p3q52(√
2q1 + 2q3) + 54q62(p22 − 3p23
+ 4√
2q31 − 24q21q3 − 6√
2q1q23) + 384p2p3q21q2(3p22 + 8√
2q31 + 8q21q3
− 2√
2q1q23)− 72p41(3p23 + 2q33) + 144p2p3q32(p22 + 8q21(2
√2q1 + 3q3))
+ 144p31(√
2p22p3 + 3√
2p2q2q23 − 3p3q22(q1 +√
2q3))− 32(p62+ 12p42q
21q3 + 12p22q
31(√
2p23 + 4q1q23) + 32q61(3p23 + 2q33))
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 28 / 29
− 12p21(4p42 − 6p2p3q2(16q21 + 9q22 + 8√
2q1q3 − 4q23) + 9q42(2q21
+ 4√
2q1q3 + q23) + 32√
2q31(3p23 + 2q33) + 12p22(p23 + 4q22q3
−√
2q1(q22 − 2q23)) + 6q22(9√
2p23q1 + 2q23(−6q21 + 2√
2q1q3 + q23)))
− 144q42(p22(7q21 + 5
√2q1q3 + 2q23) + 3q21(3p23 − 2q3(−2q21
+ 2√
2q1q3 + q23)))− 48q22(p42(5√
2q1 + 4q3) + 4p22q21(8q21
+ 2√
2q1q3 + 3q23) + 8q31(9p23q1 + q23(−6√
2q21 + 4q1q3 +√
2q23)))
+ 6p1(16√
2p42p3 + 16p22p3(8q31 − 6q1q22 + 3√
2q22q3)
+ 4p32q2(−16√
2q21 + 32q1q3 +√
2(3q22 + 4q23)) + 3p3q22(9√
2q42
− 64q31(√
2q1 + 2q3)− 12q22(2√
2q21 + 8q1q3 +√
2q23))
+ 12p2q2(−3√
2p23q22 + 9q1q42 + 32q31q
23 + 4q22(4q31 + 6q1q23 +
√2q33))).
M. Przybylska (CA UMK) Ruch i całki 10.03.2010 29 / 29














![Collins Andy - Mowa Ciała [Co Znaczą Nasze Gesty]](https://static.fdocuments.pl/doc/165x107/55cf944c550346f57ba1074f/collins-andy-mowa-ciala-co-znacza-nasze-gesty.jpg)