Bezpieczeństwo przesyłu danych finansowych i osobowych, klientów w energetyce

INSTYTUT AUTOMATYKI I INFORMATYKI STOSOWANEJ
na kierunku Automatyka i Robotykaw specjalności Automatyka i Robotyka
Układ elektroniczny do akwizycji danych z jednostkiinercyjnej za pośrednictwem EtherCAT
Bartosz Joacutezef KaczorNumer albumu 241797
PromotorDr inż Tomasz Winiarski
Warszawa 2017
Streszczenie
Układ elektroniczny do akwizycji danych z jednostkiinercyjnej za pośrednictwem EtherCAT
Przedmiotem niniejszej pracy jest stworzenie oraz oprogramowanie układu elek-tronicznego umożliwiającego podłączenie jednostki inercyjnej ADIS16362 do magi-strali EtherCAT W pracy tej opisana jest struktura zaprojektowanego układu odmodułu głoacutewnego poprzez urządzenie komunikujące się z istniejącą infrastrukturąkomunikacyjną EtherCAT po podłączenie jednostki inercyjnej Znajdziemy roacutew-nież opis wytworzonego oprogramowania znajdującego się zaroacutewno na wytworzonymurządzeniu jak i urządzeniu nadrzędnym w komunikacji (komputerze PC) W ramachpracy został roacutewnież przeprowadzony przegląd dostępnych na rynku rozwiązań tegotypu oraz algorytmoacutew służących do korekcji odczytu siły Zostały roacutewnież zaimple-mentowane programy testowe i przeprowadzone na ich podstawie badania
Podjęcie tego tematu było motywowane wynikami eksperymentoacutew z jednostkąinercyjną komunikującą się za pomocą interfejsu USB Ujawniły one zmienne poacuteź-nienie w komunikacji Opoacuteźnienie to wahało się nawet do kilkudziesięciu milisekundDodatkowym powodem wyboru sposobu komunikacji była chęć ujednolicenia sposo-boacutew połączenia urządzeń w ramach całego robota
Słowa kluczowe EtherCAT IMU Anybus B40 IRp-6
2
Abstract
The electronic system for data acquisition from inertial unitvia EtherCAT
The subject of this thesis is to create software and electronic system that allowsconnecting the ADIS16362 inertial unit to the EtherCAT bus In this work thestructure of the designed system is described from the main hardware unit by thedevice communicating with existing EtherCAT infrastructure to hardware interfaceconnecting to IMU In this paper we also find a description of the produced softwarelocated on both the manufactured device and the master communication device(PC) As a part of the work was also carried out a review of commercially availablesolutions of this type and correction algorithms for force measurement There havealso been implemented test programs and executed experiments with its use
The choice of this topic was motivated by the result of experiments with iner-tial unit communicating via the USB interface They revealed a variable delay incommunication This delay ranged up to tens of milliseconds Another reason forchoosing this way of communication was to standardize the ways to link deviceswithin the entire robot
Keywords EtherCAT IMU Anybus B40 IRp-6
3
4
Spis treści
1 Wstęp 711 Założenia i problematyka pracy 712 Układ Pracy 7
2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwezastosowania układu 921 Definicje 922 Działanie jednostki inercyjnej 10
221 Akcelerometry MEMS 10222 Żyroskopy MEMS 11223 Żyroskopy światłowodowe 11
23 Działanie magistrali Ethercat 11231 COE 12232 Synchronizacja zegara 12
24 Jednostki inercyjne ze złączami I2C oraz SPI 1225 Jednostki inercyjne ze złączami przemysłowymi 1326 Możliwe zastosowania proponowanego układu 14
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym 14262 Korekcja odczytu siły z czujnika nadgarstkowego 14
3 Opis budowanego układu 1531 Opis Układu 15
311 Moduł głoacutewny 16312 Moduł jednostki inercyjnej (IMU) 16313 Anybus M40 EtherCAT 17
32 Opis złącz 17321 Złącze międzypłytkowe 17322 Złącze zasilania 18323 Złącze interfejsu EtherCAT 19324 Złącze Jtag 20325 Złącze Anybus B40-CPU 20
4 Opis oprogramowania 2341 Protokoły komunikacyjne 23
411 Standard EtherCAT 23412 Can over EtherCAT 23
42 Oprogramowanie MCU 24421 Konfiguracja peryferioacutew 24422 Sterownik Anybus 25423 Przerwania 30
43 Sterownik w strukturze OROCOS 31
Spis treści 5
5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
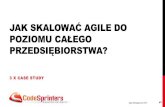
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
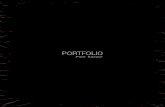
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
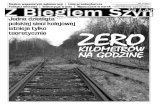
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Streszczenie
Układ elektroniczny do akwizycji danych z jednostkiinercyjnej za pośrednictwem EtherCAT
Przedmiotem niniejszej pracy jest stworzenie oraz oprogramowanie układu elek-tronicznego umożliwiającego podłączenie jednostki inercyjnej ADIS16362 do magi-strali EtherCAT W pracy tej opisana jest struktura zaprojektowanego układu odmodułu głoacutewnego poprzez urządzenie komunikujące się z istniejącą infrastrukturąkomunikacyjną EtherCAT po podłączenie jednostki inercyjnej Znajdziemy roacutew-nież opis wytworzonego oprogramowania znajdującego się zaroacutewno na wytworzonymurządzeniu jak i urządzeniu nadrzędnym w komunikacji (komputerze PC) W ramachpracy został roacutewnież przeprowadzony przegląd dostępnych na rynku rozwiązań tegotypu oraz algorytmoacutew służących do korekcji odczytu siły Zostały roacutewnież zaimple-mentowane programy testowe i przeprowadzone na ich podstawie badania
Podjęcie tego tematu było motywowane wynikami eksperymentoacutew z jednostkąinercyjną komunikującą się za pomocą interfejsu USB Ujawniły one zmienne poacuteź-nienie w komunikacji Opoacuteźnienie to wahało się nawet do kilkudziesięciu milisekundDodatkowym powodem wyboru sposobu komunikacji była chęć ujednolicenia sposo-boacutew połączenia urządzeń w ramach całego robota
Słowa kluczowe EtherCAT IMU Anybus B40 IRp-6
2
Abstract
The electronic system for data acquisition from inertial unitvia EtherCAT
The subject of this thesis is to create software and electronic system that allowsconnecting the ADIS16362 inertial unit to the EtherCAT bus In this work thestructure of the designed system is described from the main hardware unit by thedevice communicating with existing EtherCAT infrastructure to hardware interfaceconnecting to IMU In this paper we also find a description of the produced softwarelocated on both the manufactured device and the master communication device(PC) As a part of the work was also carried out a review of commercially availablesolutions of this type and correction algorithms for force measurement There havealso been implemented test programs and executed experiments with its use
The choice of this topic was motivated by the result of experiments with iner-tial unit communicating via the USB interface They revealed a variable delay incommunication This delay ranged up to tens of milliseconds Another reason forchoosing this way of communication was to standardize the ways to link deviceswithin the entire robot
Keywords EtherCAT IMU Anybus B40 IRp-6
3
4
Spis treści
1 Wstęp 711 Założenia i problematyka pracy 712 Układ Pracy 7
2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwezastosowania układu 921 Definicje 922 Działanie jednostki inercyjnej 10
221 Akcelerometry MEMS 10222 Żyroskopy MEMS 11223 Żyroskopy światłowodowe 11
23 Działanie magistrali Ethercat 11231 COE 12232 Synchronizacja zegara 12
24 Jednostki inercyjne ze złączami I2C oraz SPI 1225 Jednostki inercyjne ze złączami przemysłowymi 1326 Możliwe zastosowania proponowanego układu 14
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym 14262 Korekcja odczytu siły z czujnika nadgarstkowego 14
3 Opis budowanego układu 1531 Opis Układu 15
311 Moduł głoacutewny 16312 Moduł jednostki inercyjnej (IMU) 16313 Anybus M40 EtherCAT 17
32 Opis złącz 17321 Złącze międzypłytkowe 17322 Złącze zasilania 18323 Złącze interfejsu EtherCAT 19324 Złącze Jtag 20325 Złącze Anybus B40-CPU 20
4 Opis oprogramowania 2341 Protokoły komunikacyjne 23
411 Standard EtherCAT 23412 Can over EtherCAT 23
42 Oprogramowanie MCU 24421 Konfiguracja peryferioacutew 24422 Sterownik Anybus 25423 Przerwania 30
43 Sterownik w strukturze OROCOS 31
Spis treści 5
5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Abstract
The electronic system for data acquisition from inertial unitvia EtherCAT
The subject of this thesis is to create software and electronic system that allowsconnecting the ADIS16362 inertial unit to the EtherCAT bus In this work thestructure of the designed system is described from the main hardware unit by thedevice communicating with existing EtherCAT infrastructure to hardware interfaceconnecting to IMU In this paper we also find a description of the produced softwarelocated on both the manufactured device and the master communication device(PC) As a part of the work was also carried out a review of commercially availablesolutions of this type and correction algorithms for force measurement There havealso been implemented test programs and executed experiments with its use
The choice of this topic was motivated by the result of experiments with iner-tial unit communicating via the USB interface They revealed a variable delay incommunication This delay ranged up to tens of milliseconds Another reason forchoosing this way of communication was to standardize the ways to link deviceswithin the entire robot
Keywords EtherCAT IMU Anybus B40 IRp-6
3
4
Spis treści
1 Wstęp 711 Założenia i problematyka pracy 712 Układ Pracy 7
2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwezastosowania układu 921 Definicje 922 Działanie jednostki inercyjnej 10
221 Akcelerometry MEMS 10222 Żyroskopy MEMS 11223 Żyroskopy światłowodowe 11
23 Działanie magistrali Ethercat 11231 COE 12232 Synchronizacja zegara 12
24 Jednostki inercyjne ze złączami I2C oraz SPI 1225 Jednostki inercyjne ze złączami przemysłowymi 1326 Możliwe zastosowania proponowanego układu 14
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym 14262 Korekcja odczytu siły z czujnika nadgarstkowego 14
3 Opis budowanego układu 1531 Opis Układu 15
311 Moduł głoacutewny 16312 Moduł jednostki inercyjnej (IMU) 16313 Anybus M40 EtherCAT 17
32 Opis złącz 17321 Złącze międzypłytkowe 17322 Złącze zasilania 18323 Złącze interfejsu EtherCAT 19324 Złącze Jtag 20325 Złącze Anybus B40-CPU 20
4 Opis oprogramowania 2341 Protokoły komunikacyjne 23
411 Standard EtherCAT 23412 Can over EtherCAT 23
42 Oprogramowanie MCU 24421 Konfiguracja peryferioacutew 24422 Sterownik Anybus 25423 Przerwania 30
43 Sterownik w strukturze OROCOS 31
Spis treści 5
5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

4
Spis treści
1 Wstęp 711 Założenia i problematyka pracy 712 Układ Pracy 7
2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwezastosowania układu 921 Definicje 922 Działanie jednostki inercyjnej 10
221 Akcelerometry MEMS 10222 Żyroskopy MEMS 11223 Żyroskopy światłowodowe 11
23 Działanie magistrali Ethercat 11231 COE 12232 Synchronizacja zegara 12
24 Jednostki inercyjne ze złączami I2C oraz SPI 1225 Jednostki inercyjne ze złączami przemysłowymi 1326 Możliwe zastosowania proponowanego układu 14
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym 14262 Korekcja odczytu siły z czujnika nadgarstkowego 14
3 Opis budowanego układu 1531 Opis Układu 15
311 Moduł głoacutewny 16312 Moduł jednostki inercyjnej (IMU) 16313 Anybus M40 EtherCAT 17
32 Opis złącz 17321 Złącze międzypłytkowe 17322 Złącze zasilania 18323 Złącze interfejsu EtherCAT 19324 Złącze Jtag 20325 Złącze Anybus B40-CPU 20
4 Opis oprogramowania 2341 Protokoły komunikacyjne 23
411 Standard EtherCAT 23412 Can over EtherCAT 23
42 Oprogramowanie MCU 24421 Konfiguracja peryferioacutew 24422 Sterownik Anybus 25423 Przerwania 30
43 Sterownik w strukturze OROCOS 31
Spis treści 5
5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Spis treści
1 Wstęp 711 Założenia i problematyka pracy 712 Układ Pracy 7
2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwezastosowania układu 921 Definicje 922 Działanie jednostki inercyjnej 10
221 Akcelerometry MEMS 10222 Żyroskopy MEMS 11223 Żyroskopy światłowodowe 11
23 Działanie magistrali Ethercat 11231 COE 12232 Synchronizacja zegara 12
24 Jednostki inercyjne ze złączami I2C oraz SPI 1225 Jednostki inercyjne ze złączami przemysłowymi 1326 Możliwe zastosowania proponowanego układu 14
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym 14262 Korekcja odczytu siły z czujnika nadgarstkowego 14
3 Opis budowanego układu 1531 Opis Układu 15
311 Moduł głoacutewny 16312 Moduł jednostki inercyjnej (IMU) 16313 Anybus M40 EtherCAT 17
32 Opis złącz 17321 Złącze międzypłytkowe 17322 Złącze zasilania 18323 Złącze interfejsu EtherCAT 19324 Złącze Jtag 20325 Złącze Anybus B40-CPU 20
4 Opis oprogramowania 2341 Protokoły komunikacyjne 23
411 Standard EtherCAT 23412 Can over EtherCAT 23
42 Oprogramowanie MCU 24421 Konfiguracja peryferioacutew 24422 Sterownik Anybus 25423 Przerwania 30
43 Sterownik w strukturze OROCOS 31
Spis treści 5
5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

5 Badania weryfikacyjne 3551 Opis stanowiska eksperymentalnego 3552 Projekt eksperymentoacutew 3553 Wyniki eksperymentoacutew 3754 Podsumowanie 42
A Schematy modułoacutew urządzenia 51
B Wykresy pobranych trajektorii 57
6 Spis treści
Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rozdział 1
Wstęp
11 Założenia i problematyka pracy
Robotyka jest bardzo szeroką i ciekawą dziedziną Z czasem systemy robotyczne wy-posażone są w coraz większą ilość czujnikoacutew ktoacutere mierzą najroacuteżniejsze parametrypracy robota jak i roacutewnież środowiska w ktoacuterym pracuje
Założeniem pracy było stworzenie układu interfejsującego jednostkę inercyjnąADIS16362 Rozwiązanie musiało zapewnić niezawodną komunikacje z kompute-rem sterującym robotem Ponieważ systemy robotyczne muszą działać w reżimieczasu rzeczywistego roacutewnież komunikacja z projektowanym układem musiała dzia-łać w ścisłym reżimie czasowym Dodatkowo ważnym czynnikiem decydującym o uży-teczności w niektoacuterych systemach robotycznych jest nie tylko okres pomiaru aleroacutewnież ustalenie momentu pomiaru z jak największą dokładnością Dlatego wymo-giem okazał się pomiar synchronizowany do czego potrzebny jest interfejs umożli-wiający synchronizację zegara we wszystkich urządzeniach magistrali Dodatkowymograniczeniem był rozmiar ponieważ układ ma nadać się do montażu w ograni-czonej przestrzeni nadgarstka robota IRP6 oraz w potencjalnych innych robotachgdzie występują ograniczenia przestrzenne Układ został więc zbudowany z mięk-kim (z możliwością niewielkiego przekroczenia) ograniczeniem rozmiaru ustalonymna 50x50x50mm
12 Układ Pracy
Niniejsza praca składa się z pięciu rozdziałoacutew Rozdział 2 zawiera podstawy teore-tyczne działania jednostki inercyjnej oraz jej elementoacutew magistrali EtherCAT orazprzegląd dostępnych na rynku jednostek inercyjnych i przykłady zastosowania jed-nostek inercyjnych w robotyce Poroacutewnywane są w nim ich parametry oraz sposobykomunikacji ich wady i zalety Opisane są tam roacutewnież przykładowe zastosowaniajednostki inercyjnej w robotyce usługowej Rozdział 3 zawiera opis mechaniczny orazelektroniczny budowanego układu opis złącz oraz wyprowadzonych na ich styki sy-gnałoacutew W rozdziale 4 znajduje się opis oprogramowania wytworzonego w ramachpracy znajdującego się zaroacutewno w wytworzonym urządzeniu jak i tego pracującegona komputerze sterującym robota Wreszcie rozdział 5 w ktoacuterym znajdziemy pro-jekt oraz wyniki eksperymentoacutew przeprowadzonych z wykorzystaniem manipulatoraIrp6 oraz wytworzonego układu
Rozdział 1 Wstęp 7
8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

8 Rozdział 1 Wstęp
Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rozdział 2
Wstęp teoretyczny przegląddostępnych rozwiązań oraz możliwezastosowania układu
Jednostka inercyjna jest urządzeniem służącym do pomiaru przyspieszeń liniowychprędkości obrotowych oraz w niektoacuterych przypadkach orientacji w polu magnetycz-nym Zawiera ono w sobie troacutejosiowe akcelerometr oraz żyroskop (dodatkowo nie-ktoacutere modele zawierają troacutejosiowy magnetometr pozwalający na wyznaczenie orien-tacji względem pola magnetycznego) Urządzenia takie roacuteżnią się pomiędzy sobąparametrami oraz sposobem połączenia z urządzeniem nadrzędnym
W tym rozdziale czytelnik zostanie wprowadzony w podstawowe zagadnienia natemat działania jednostki inercyjnej Najpierw w sekcji 21 przedstawiony zosta-nie spis definicji oraz skroacutetoacutew Zasady działania jednostki inercyjnej zostały opi-sane w sekcji 22 W sekcji 23 przedstawione zostały podstawy działania magistraliEtherCAT oraz jej mechanizmoacutew
Jednostki inercyjne dzielą się przede wszystkim ze względu na obecność magne-tometru częstotliwość pomiaru (oraz dostarczania danych wyjściowych) oraz nasposoacuteb komunikacji Przykłady urządzeń komunikujących się za pomocą interfejsoacutewI2C oraz SPI opisane są w sekcji 24 a te komunikujące się za pomocą standardoacutewprzemysłowych opisane są w sekcji 25 Na końcu wzbogacony tą wiedzą w sekcji 26czytelnik pozna przykładowe zastosowania takiego urządzenia w zadaniach robotyki
21 Definicje
IMU - z Angielskiego Inertial Measurement Unit - zespoacuteł czujnikoacutew pozwalającyna pomiar Przyspieszeń ciała oraz prędkości kontowych z jakimi się porusza Cza-sami roacutewnież zawiera on Magnetometr pozwalający na pomiar orientacji urządzeniawzględem pola magnetycznego (zazwyczaj ziemi)
ETHERCAT - Ethernet for Control Automation Technology - jest standardemkomunikacji w urządzeniach automatyki Bazuje on na architekturze Ethernet Stan-dard ten został stworzony do zastosowań czasu rzeczywistego i pozwala na ustalenieczasu pomiaru z dokładnością do kilkudziesięciu mikrosekund
PDO - Process Data Object - Paczka danych procesowych służąca do przekazy-wania stanu urządzenia Ten typ obiektoacutew pozwala na ciągły odczyt danych
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 9
SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

SDO - Service Data Object - Są to paczki danych pozwalające na konfiguracjeurządzenia podrzędnego
FMMU - jest urządzeniem odpowiedzialnym za mapowanie obiektoacutew PDO dopamięci urządzenia podrzędnego Pośredniczy ono w każdej komunikacji za pomocąmagistrali ethercat [7]
ROS - Robot Operating System - Jest to zbioacuter bibliotek oraz oprogramowaniezapewniające komunikacje międzyprocesowa spoacutejne środowisko uruchomienioweoraz środowisko do budowy oprogramowania
Węzeł - Jest to pojedyncza instancja programu uruchomionego w ramach opro-gramowania ROS
Temat - Jest to kanał komunikacji międzyprocesowej udostępniany przez opro-gramowanie ROS Topik posiada dwa typy Nodoacutew podłączonych do niego Publisherjet to node ktoacutery wysyła dane w danym topicu Subscriber jest nodem odbierającymdane z topicu Każdy kanał ma określony typ danych ktoacutere można na nim nadawaćoraz może mieć wielu nadawcoacutew (Publisher) i odbiorcoacutew (Subscriber)
OROCOS - Open RObot Control Software - jest otwartym oprogramowaniemsłużącym do sterowania systemami robotycznymi w czasie rzeczywistym Wszystkieakcje ktoacutere muszą być wykonywane w reżimie czasu rzeczywistego są uruchamianew ramach struktury OROCOSMCU - W skroacutecie mikrokontroler układ scalony zawierający w sobie rdzeń proce-sora oraz peryferia zewnętrzne W tym przypadku MCU to mikrokontrolerTM4C129ENCPDT wyposażony w rdzeń Cortex-M4F
MEMS - Od angielskiego microelectromechanical system Jest to zintegrowanyukład elektromechaniczny ktoacuterego co najmniej jeden wymiar znajduje się w skalimikro
22 Działanie jednostki inercyjnej
Jednostka inercyjna jest urządzeniem złożonym z kilku czujnikoacutew Najczęściej wszyst-kie zawarte w niej urządzenia wykonane sa w technologi MEMS Często spotykanąw ostatnich latach sytuacją jest że wszystkie te urządzenia znajdują się w jed-nym układzie scalonym Akcelerometry zawierające się w jednostkach inercyjnychwystępują praktycznie tylko w wersji MEMS a podstawy ich działania opisane sąw podsekcji 221 Żyroskopy roacutewnież w zdecydowanej większości występują jakowykonane w tej technologii elementy krzemowe ktoacuterych zasadę działania opisanow podsekcji 222 Jednak okazało się że można roacutewnież spotkać jednostki inercyjnezawierające żyroskopy światłowodowe przedstawione w podsekcji 223 Urządzeniate jednak najczęściej dedykowane są do zastosowań na dużych maszynach takich jakstatki morskie czy samoloty
221 Akcelerometry MEMS
Akcelerometry MEMSmożna dzielić na dwa typy Pierwszym z nich są akcelerometrypiezorezystancyjne [3] Akcelerometry te opierają się o dosyć prostą zasadę działania
10 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Masa odchylająca się pod wpływem siły bezwładności proacutebuje odkształcić piezorezy-story wmontowane w belkę na ktoacuterej jest zaczepiona Mierząc rezystancję wspomnia-nych piezorezystoroacutew można ustalić siłę działającą na masę oraz dzięki znajomościmasy wartość przyspieszenia ktoacuteremu poddawany jest układ Oczywiście wspoacutełcze-sne układy stosują zaawansowane techniki w celu zmniejszenia wpływu przyspieszeńw innych osiach niż badana oraz zabezpieczeniu przed uszkodzeniem wywołanymnadmiernymi przeciążeniami Jednak zasada działania pozostaje ta sama
Drugim rodzajem akcelerometroacutew MEMS są akcelerometry pojemnościowe Ak-celerometr pojemnościowy do swojego działania wymaga dwoacutech elementoacutew elek-trody stałej oraz elektrody połączonej z masą ktoacutera będzie poruszana siłą bezwład-ności Gdy masa zbliża się do elektrody stałej pojemność się zwiększa gdy natomiastsiła bezwładności działa w drugą stronę pojemność się zmniejsza Takie założeniapozwalają na pomiar przyspieszenia w akcelerometrze pojemnościowym
222 Żyroskopy MEMS
Obecnie produkowane żyroskopy MEMS to żyroskopy wibracyjne [3] Ich zasadadziałania jest nieco bardziej skomplikowana niż zasada działania akcelerometroacutewMEMS W układzie takim masę należy wprawić w wibracje wzdłuż jednej z osi (naprzykład x) leżącej na płaszczyźnie zawierającej dwie z nich (na przykład płaszczy-zna xy) W tej sytuacji pomiar możliwy będzie przy obrocie wokoacuteł trzeciej osi (z)Przy obrocie wokoacuteł osi Z czujnika siła Coriolisa przeniesie drgania z osi X na oś Ymierząc amplitudę tych drgań (na przykład za pomocą metody pojemnościowej jakw akcelerometrze pojemnościowym) można ustalić prędkość obrotu wokoacuteł danej osi
223 Żyroskopy światłowodowe
Działanie żyroskopoacutew światłowodowych oparte jest o efekt Sagnaca [12] jest toefekt polegający na przesunięciu w fazie dwuch rozszczepionych wiązek światła bie-gnących po pętli w przeciwnych kierunkach jeżeli układ się obraca Efekt ten jestspowodowany tym że w obracającym się układzie światło lecące w jedną stronę musipokonać dłuższą drogę niż światło lecące w stronę przeciwną Efekt ten stosuje sięw żyroskopach światłowodowych wielokrotnie zwiekszając drogę jaką musi pokonaćświatło poprzez zwiększenie ilości zwojoacutew światłowodu Żyroskopy takie mają bar-dzo wysoką czułość (nawet do jednej dziesięciotysięcznej stopnia na godzinę) orazbardzo niski dryft
23 Działanie magistrali Ethercat
EtherCAT jest standardem stworzonym przez firmę Beckhoff Automation Standardten jest jednak otwarty i powstają otwarte implementacje jego elementoacutew Choćsam standard swoje niższe warstwy opiera na Ethernecie (warstwę fizyczną orazczęść warstwy łącza danych) to wyższe z nich roacuteżnią się między sobą ze względuna zastosowanie na przykład protokołem warstwy aplikacji jest protokoacuteł Can OverEtherCAT opisany w podsekcji 231 W podsekcji 232 znajduje się wprowadzeniedo działania rozproszonego zegara magistrali EtherCAT
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 11
(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

(a) Struktura ramki ethercat źroacutedło [5] (b) Struktura ramki danych źroacutedło [5]
Rysunek 21 Schematy przedstawiające strukturę ramki w komunikacji ethercat
231 COE
CANopen Over EtherCAT [5] jest protokołem warstwy aplikacji działającym w sieciEthercat jest to protokoacuteł komunikacyjny bazujący na systemie CAN Wykorzystanieimplementacji protokołu CoE sprawia że EtherCAT jest kompatybilny z urządze-niami obsługującymi CANopen Aby zrozumieć w jaki sposoacuteb datagramy CANopenprzekazywane są w protokole ethercat musimy przyjrzeć się strukturze jego ramkiTa (pokazana na rysunku 21(a)) zawiera czternastobajtowy nagłoacutewek ramki ether-cat dwubajtowe pole długości wiadomości wiadomość oraz czterobajtową sumękontrolną W polu wiadomości może znajdować się wiele datagramoacutew każdy z nichmoże być adresowany do innego urządzenia w magistrali ethercat Każdy datagramzawiera swoacutej nagłoacutewek ktoacutery adresuje go do danego urządzenia pole danych orazsumę kontrolną Skład pola danych pokazany na rysunku 21(b) a składa się onoz nagłoacutewka ktoacutery między innymi zawiera typ ktoacutery wskazuje na protokoacuteł warstwyaplikacji czyli na przykład CoE Następnie w ramce znajduje się komenda oraz od-powiadające jej dane
232 Synchronizacja zegara
Algorytm synchronizacji czasu w standardzie ethercat oparty jest o standard Pre-cision Time Protocol Jest to standard zaakceptowany przez IEEE o sygnaturzeIEEE 1588-2008 służący do submikrosekundowej synchronizacji czasu między urzą-dzeniami połączonymi w jedną sieć Więcej o działaniu samego protokołu możemyprzeczytać w publikacjach [15] [8] W protokole EtherCAT do synchronizacji zegarawyznaczany jest pierwsze urządzenie podrzędne na magistrali Ponieważ urządzeniapodrzędne magistrali EtherCAT wspierają synchronizacje sprzętową za pomocą pro-tokołu PTP możliwe jest odciążenie węzła głoacutewnego
24 Jednostki inercyjne ze złączami I2C oraz SPI
Szerokie spektrum tych urządzeń korzysta z interfejsoacutew I2C oraz SPI Taki spo-soacuteb podłączenia daje możliwość szybkiego przesyłu danych jednak ograniczeniemw takim przypadku jest odległość na jaka można prowadzić komunikację I2C niema zdefiniowanego maksymalnego zasięgu a maksymalną pojemność linii komuni-kacyjnej na poziomie 400 pF [16] co ogranicza zasięg komunikacji do pojedynczychmetroacutew w warunkach idealnych Magistrala SPI roacutewnież nie podaje maksymalnegozasięgu jednak w optymalnych warunkach jest to ok 2m
12 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Jednostki inercyjne ze złączami I2C oraz SPI są zazwyczaj tańszymi modelamiW większości są oferowane jako układy elektroniczne do montażu powierzchniowegoOto kilka przykładoacutew tego typu jednostek
bull LSM9DS0 - Jednostka inercyjna firmy ST electronics z interfejsem komunika-cyjnym SPII2C wyposażona w akcelerometr żyroskop i magnetometr Mak-symalne proacutebkowanie magnetometru to 100Hz akcelerometru 1600Hz żyro-skop ma maksymalną częstotliwość dostarczania danych 760Hz Jednostka do-starczana jest w obudowie LGA-24 o rozmiarach 4x4x1mm
bull ADIS16362 - Jednostka inercyjna firmy Analog devices jest to jednostka za-wierająca akcelerometr oraz żyroskop (oba troacutejosiowe) Charakteryzuje się onawysoką maksymalną częstotliwością proacutebkowania ponieważ dla obu czujnikoacutewwynosi ona 1200Hz Interfejs komunikacyjny stanowi złącze SPI Urządzeniedostarczane jest w obudowie w kształcie sześcianu 2x2 cm z miejscami naprzykręcenie jej do urządzenia W przeciwieństwie do poprzedniego urządze-nia jednostka posiada program kalibracji
25 Jednostki inercyjne ze złączami przemysłowymi
Inne z tych urządzeń komunikują się za pomocą dedykowanych standardoacutew prze-mysłowych ktoacutere charakteryzują się znacznie większą odpornością na zakłoacuteceniaa także na ciężkie warunki pracy Warto w tym miejscu zaznaczyć że jak dotąd narynku nie ma jednostki inercyjnej ktoacutera komunikowała by się za pomocą magistraliEthercat
Jednostki inercyjne omawiane w tym podrozdziale są urządzeniami ze złączamiprzemysłowymi przez co rozumiemy że złącza te charakteryzują się dużą nieza-wodnością Niestety modele zapewniające taki komfort są zazwyczaj znacznie więk-sze oraz droższe
bull MTi 100-series - Jednostki inercyjne firmy Xsens jest jednostką zawierającąakcelerometr i żyroskop Maksymalna częstotliwość dostarczania danych to2000Hz Jednostka ta komunikuje się za pomocą interfejsoacutew RS232 RS485422 UART USB Urządzenie to jest dostarczone w wodoodpornej obudo-wie mocowanej do urządzenia na śruby z przemysłowym złączem służącym dokomunikacji oraz zasilania Producent deklaruje że urządzenie posiada żyro-skop filtrujący wpływ wibracji
bull KVH 1750 IMU - Jednostka inercyjna firmy KVH jest urządzeniem posiada-jącym żyroskop światłowodowy oraz 3 oddzielne akcelerometry MEMS Inter-fejs komunikacyjny tego modułu to RS-422 Obudowa tej jednostki to waleco średnicy 89 mm i wysokości 74 mm przytwierdzany za pomocą sześciu śrubUrządzenie może produkować dane z częstotliwością do 1000Hz Charaktery-zuje się ono bardzo niskim dryftem żyroskopu Dryft ten typowo musi byćkorygowany za pomocą magnetometru
bull 6DF-1N2-C2-HWL - Jednostka inercyjna firmy Honeywell wyposażona jestw akcelerometr oraz żyroskop (oba troacutejosiowe) Interfejs komunikacyjny tegourządzenia to CAN Maksymalna częstotliwość dostarczania danych to 100Hz
Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu 13
26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

26 Możliwe zastosowania proponowanego układu
Możliwe zastosowania jednostek inercyjnych w robotyce pojawiają się tam gdziewystępuje ruch inny od jednostajnego prostoliniowego W tym rozdziale rozważymydwa zastosowania w ktoacuterych proponowany układ może pokazać swoje zalety wy-nikające ze sposobu komunikacji W sekcji 261 omoacutewimy przypadek zastosowaniajednostki inercyjnej do wspomagania procesu nawigacji robota mobilnego o napę-dzie roacuteżnicowym Sekcja 262 dotyczyć będzie przypadku użycia takiego urządzeniado korekty odczytu siły z czujnika umieszczonego w nadgarstku manipulatora
261 Nawigacja Robota Mobilnego o napędzie roacuteżnicowym
W tej sekcji przedstawiony zostanie przykład nawigacji robota mobilnego o napę-dzie roacuteżnicowym Przykładem takiego robota może być robot o konstrukcji takiejjak baza mobilna elektron [10] czyli robot posiadający wiele koacuteł po jednej stro-nie co generuje problemy z odtworzeniem trajektorii ruchu robota przez odczytyz czujnikoacutew odometrycznych Dzieje się tak przez to że budowa robota wprowa-dza poślizgi podczas skrętoacutew Robot taki ze względu na roacuteżne czynniki zewnętrznenp typ podłoża nieroacutewności podłoża skręca w okoacuteł trudnej do ustalenia osi obrotuktoacutera w dodatku może być zmienna (np gdy jedno koło jest na innym typie podłożaniż wszystkie inne) Aby temu zapobiec można użyć do estymacji trajektorii ruchurobota pomiaroacutew pochodzących z czujnika inercyjnego razem z odczytami z senso-roacutew odometrycznych Aby tego dokonać potrzebna jest fuzja odczytoacutew z roacuteżnychczujnikoacutew Istnieje wiele metod podejścia do tego tematu jednak jednym z częściejspotykanych w literaturze jest użycie rozszerzonego filtru Kalmana [18] [17] [4]
262 Korekcja odczytu siły z czujnika nadgarstkowego
Drugim przykładem zastosowania jednostki inercyjnej w robotyce jest korekcja od-czytu z czujnika siły [20] Nie jest to zastosowanie tak szeroko omawiane w literaturzejak nawigacja wspomagana inercyjnie opisana w sekcji 261 Pomimo niewielkiegozainteresowania jest to bardzo ciekawy temat badawczy głoacutewnie ze względu na chęćwyeliminowania bdquopikoacutewrdquo odczytoacutew siły wynikających z nagłej zmiany kierunku ru-chu ramienia bądź też drgnięcia wynikającego z niedoskonałości regulatora Do tegozastosowania konstruuje się obserwator siły oparty o filtr Kalmana [6]
14 Rozdział 2 Wstęp teoretyczny przegląd dostępnych rozwiązań oraz możliwe zastosowania układu
Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rozdział 3
Opis budowanego układu
W ramach tej pracy powstał układ elektroniczny umożliwiający komunikację mię-dzy urządzeniem jednostki inercyjnej a magistralą ethercat Zaroacutewno projekt płytekdrukowanych dwoacutech rozłącznych modułoacutew opisanych w sekcji 31 jak i projekt sche-matyczny skutkujący układem sygnałoacutew na każdym ze złącz opisanych w sekcji 32pochłonęły wiele pracy Pogodzenie wszystkich wymagań zaroacutewno mechanicznychjak i elektrycznych czy tych dotyczących możliwości ponownego wykorzystania mo-dułu głoacutewnego stanowiły dla autora wyzwanie
31 Opis Układu
Opracowany układ składa się z dwoacutech niezależnych modułoacutew połączonych przez złą-cza o wysokiej gęstości Moduł głoacutewny opisany jest w sekcji 311 a moduł jednostkiinercyjnej w sekcji 312 Konstrukcja taka pozwala na uniwersalne wykorzystaniemodułu głoacutewnego poprzez wymianę zamontowanych modułoacutew np zamiast modułujednostki inercyjnej można zaprojektować sterownik silnikoacutew lub inne urządzeniewymagające komunikacji za pośrednictwem EtherCATrsquoa Do modułu głoacutewnego pod-łączony jest układ odpowiadający za komunikację z magistralą EtherCAT opisanyjest on w sekcji 313 Moduł głoacutewny przedstawiony jest na rysunku 31(a) a modułjednostki inercyjnej na rysunku 31(b)
(a) płytka modułu głoacutewnego (b) płytka modułu jednostki inercyjnej
Rysunek 31 Wizualizacja płytek
Rozdział 3 Opis budowanego układu 15
311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

311 Moduł głoacutewny
Moduł głoacutewny schematycznie przedstawiony na rysunku 32 oparty jest o procesorTM4C129EN Odpowiada on za komunikację z urządzeniem obsługującym magi-stralę EtherCAT W tym przypadku rolę tę odgrywa układ Anybus B40 EtherCAT313 Mikrokontroler TM4C129EN został wybrany z powodu posiadania interfejsuEPI (External peripherial interface) Jest to roacutewnoległy interfejs używany do komu-nikacji z urządzeniem Anybus B40 może on pracować z częstotliwością 30 MHz coprzy ośmiobitowej szerokości magistrali daje transfer na poziomie 30 MBs Jegopodłączenie do mikrokontrolera opisane jest w sekcji 325 Dodatkowo na złączauniwersalne wyprowadzone są wszystkie inne porty mikrokontrolera oraz zasilaniei masa układu
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
Rysunek 32 Rysunek płytki głoacutewnej wraz z podanymi wymiarami
312 Moduł jednostki inercyjnej (IMU)
Moduł jednostki inercyjnej zawiera samą jednostkę inercyjną ADIS16362 podłą-czoną do złącza płytka-płytka Jednostka inercyjna komunikuje się z procesorem zapomocą interfejsu SPI IMU jest zintegrowanym urządzeniem cyfrowym ktoacutere po-siada funkcje sprawdzania swojego stanu oraz autokalibracji Opis połączeń znajdujesię w tablicy 31
Tablica 31 Opis podłączeń do jednostki inercyjnejPin jednostki inercyjnej Pin procesora Opis
DIO3 NC ndashSCLK PA2 SPI ClockDIN PA4 SPI data inputDIO1 NC ndashDIO2 NC ndashDIO4 PB2 Sync Clock InputDOUT PA5 SPI data outputCS PA3 SPI chip select
RESET PB1 not reset
16 Rozdział 3 Opis budowanego układu
313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

313 Anybus M40 EtherCAT
Anybus B40 EtherCAT przedstawiony na zdjęciu 33(a) jest modułem pozwalają-cym na szybką komunikację z masterem EtherCAT Układ ten posiada dwa złącza(jedno do połączenia interfejsu sieciowego oraz jedno do komunikacji z mikrokon-trolerem) Są one przedstawione na rysunku 33(b)
(a) Zdjęcie modułu odpowiadającego za komu-nikację EtherCAT
(b) Rysunek złączy modułu Anybus B40 źroacute-dło [2]
Rysunek 33 Wizualizacja płytek
32 Opis złącz
Urządzenie zawiera zestaw złącz o roacuteżnym przeznaczeniu Złącza międzypłytkowemają zapewnić komunikację między modułami (głoacutewnym oraz jednostki inercyjnej)Są to dwa podłużne złącza zawierające po 40 stykoacutew ich opis znajduje się w sek-cji 321 Złącze zasilania umieszczone jest na płytce modułu jednostki inercyjnejOpis tego złącza znajduje się w sekcji 322 Następne złącza znajdujące się na płytcemodułu głoacutewnego to złącza służące do podłączenia kabla ethernetowego Umożliwiato komunikację za pomocą EtherCATrsquoa Opis tych złącz znajduje się w sekcji 323Złącze programowania to standardowe złącze jtag o rastrze 127 mm znajduje sięono na płytce modułu głoacutewnego i jest opisane w sekcji 324 Ostatnim opisywanymzłączem jest to łączące procesor z układem Anybus B40 Opis tego złącza znajdujesię w sekcji 325
321 Złącze międzypłytkowe
Złącze międzypłytkowe służy do połączenia obu modułoacutew Są to dwa gniazda umiesz-czone na płycie modułu głoacutewnego z czego każde posiada piny numerowane tak jakna rysunku 34 Zastosowane złącza to TE CONNECTIVITY AMP 5179030-1Na module znajdziemy dwa tego typu złącza numerowane jako J6 oraz J7 jak narysunku 32
Rozdział 3 Opis budowanego układu 17
Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rysunek 34 Standard numeracji na złączu międzypłytkowym
Opis wyprowadzeń złącz przedstawiony jest w tabeli 32 Wszystkie nazwy pinoacutewprzedstawione są tak jak w mikrokontrolerze TM4C1294NCPDT [9] firmy TexasInstruments ktoacuterego ten moduł używa
Tablica 32 Opis podłączeń w złączu międzypłytkowymJ6 J7 J6 J7
numer pinu nazwa pinu nazwa pinu numer pinu nazwa pinu nazwa pinuzłącza złącza
1 PL6 3v3 21 PD2 5V2 PB1 GND 22 PD1 5V3 PC0 GND 23 PD7 PA24 PP3 PL7 24 PD6 PH35 PP5 PB2 25 PD5 PH26 PN2 PM4 26 PD4 PA37 PN3 PM5 27 PE5 PA48 PN5 PM6 28 PE4 PF19 PH1 PK5 29 PB4 PF310 PH0 PK7 30 PB5 PG311 PJ1 PQ5 31 PP0 PG412 PP1 PG6 32 PJ0 PG713 PQ3 PG5 33 PN4 PQ614 PE0 PG2 34 PN1 PM715 PE1 PF4 35 PN0 PK616 PE2 PF2 36 PP4 PK417 PE3 PF0 37 PQ4 PL518 PQ2 PA5 38 PC1 GND19 PD0 5V 39 PC2 GND20 PD3 5V 40 PC3 3v3
322 Złącze zasilania
Złącze zasilania umieszczone na płytce jednostki inercyjnej jest złączem typu micro-fit 30 Numeracja połączeń przedstawiona jest na rysunku 35 a opis połączeń w ta-beli 34 Układ zasilany jest za pomocą napięcia 5V plusmn5 źroacutedło napięcia powinno
18 Rozdział 3 Opis budowanego układu
mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

mieć wydajność na poziomie co najmniej 11A Taka wydajność zapewni działaniezestawu obu opisanych modułoacutew Sam moduł głoacutewny wymaga 1A prądu
1112
1314
Rysunek 35 Schemat złącza zasilania
Tablica 33 Opis połączeń złącza zasilaniaPin Nazwa Opis1 +5 Napięcie zasilające +5V plusmn52 NC3 NC4 GND Wspoacutelna masa
323 Złącze interfejsu EtherCAT
Na płytce modułu głoacutewnego znajdują się dwa złącza do podłączania przewodoacutewethernetowych etykietowanych jako J4 i J5 jak na rysunku 36(b) Numeracja pinoacutewzobrazowana jest na rysunku 36(a) Złącze J4 jest złączem wyjściowym a złącze J5złączem wejściowym Oznacza to że do gniazda J5 należy podłączyć interfejs komu-nikacyjny urządzenia nadrzędnego lub złącza wyjściowego poprzedniego urządzeniapodrzędnego
(a) numeracja pinoacutew
A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
6 6
B1
J5J4
R77
R66
R55
R1
R2
R5
R6
R7
C66
C55
C44
C3
C4
C7
Cld
o
CV1
CV2
CV3
CV4CV5CV6CV7
CV
8
CV9
CV10
CV11
CV12
CV
13
R11
R12
R13R14
DL3
DL4
NONAME1
J2
View from Top side (Scale = 2)
X1
U1
R20
R21
R33R34
R35
Rp
g
Rp
u
Rs
Cx2
Cx1
C1C2
C5C6
C21
Cin
Co
ut
CVref1
CVref2
R15
R16
R17
R18
U2
DL1 DL2
1
T2 T1
View from Bottom side (Scale = 2)
40m
m
43mm
4mm
14m
m
484
4mm
5294mm
195
5mm
49mm51mm
Oslash3mm
Oslash08mm
Oslash12mm
Oslash3mm202
mm
Oslash12mm
Oslash08mm
33mm
A3
UNLESS OTHERWISE SPECIFIEDDIMENSIONS ARE IN MILLIMETERSSURFACE FINISHTOLERANCES LINEAR ANGULAR
FINISH DEBURR AND BREAK SHARP EDGES
DRAW
CHKD
APPVD
MFG
QA
NAME SIGNATURE DATA
MATERIAL
TITLE
DO NOT SCALE DRAWING REVISION
DWG N0
WEIGHT SCALE 11 SHEET 1 OF 2
J6
J7
J4J5
J8
J9
(b) położenie złącz na płytce
Rysunek 36 Numeracja pinoacutew oraz położenie złącz na płytce
Rozdział 3 Opis budowanego układu 19
Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Tablica 34 Opis połączeń złącza EtherCATPin Nazwa Opis1 Tx+ Transmit positive2 Tx- Transmit negative3 Rx+ Receive positive4 Rx- Receive negative5 Ekran Ekran przewodu
324 Złącze Jtag
Złącze Jtag znajduje się na płytce modułu głoacutewnego jest ono oznaczone jako J2 na32 Jest to złącze typu Cortex Debug Connector Standard ten jest zdefiniowanyw dokumencie [11]
Rysunek 37 Schemat złącza jtag
325 Złącze Anybus B40-CPU
Podłączenie jednostki obsługującej protokoacuteł EtherCAT do mikrokontorlera odbywasię za pomocą złącza hosta tego układu (J8 na rysunku 32) Numeracja tego złączapokazana jest na rysunku 38 a sygnały podłączone do mikrokontrolera opisane sąw tabeli 35
Rysunek 38 Numeracja złącza hosta źroacutedło [2]
20 Rozdział 3 Opis budowanego układu
Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Tablica 35 Opis połączeń złącza EtherCATnumer pinu złącza Nazwa pinu B40 Nazwa pinu CPU
03 RESET PA004 A0 PA605 A1 PA706 A2 PG107 A3 PG009 A4 PM310 A5 PM211 A6 PM112 A7 PM013 A8 PL015 A9 PL116 A10 PL217 A11 PL319 A12 PQ020 A13 PQ121 D7 PK722 D6 PK623 D5 PK525 D4 PK426 D3 PK327 D2 PK229 D1 PK131 D0 PK036 CS PL437 WEWELCT PP238 IRQPA PB039 OE PB354 MI0SYNC PA1
Rozdział 3 Opis budowanego układu 21
22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

22 Rozdział 3 Opis budowanego układu
Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rozdział 4
Opis oprogramowania
W ramach niniejszej pracy zostały wytworzone dwa programy Pierwszy z nich jestto firmware wgrywany na mikrokontroler Oprogramowanie to opisane w sekcji 42jest odpowiedzialne za interfejsowanie jednostki inercyjnej z kontrolerem magistraliethercat Drugą częścią oprogramowania stworzoną w ramach pracy jest sterow-nik włączony w strukturę OROCOS Jego działanie opisane w sekcji 43 polega naudostępnieniu pomiaroacutew z jednostki inercyjnej do użytku zaroacutewno wewnątrz opro-gramowania uruchomionego w reżimie czasu rzeczywistego pod kontrolą OROCOSjak i poza nim w strukturze ROS
41 Protokoły komunikacyjne
W tym rozdziale omoacutewione zostaną protokoły komunikacyjne dzięki ktoacuterym reali-zowana jest komunikacja z jednostką nadrzędną stworzonym urządzeniem Najpierwopisane zostaną założenia standardu EtherCAT Miały one niebagatelny wpływ nawyboacuter sposobu komunikacji a te najistotniejsze opisane są w sekcji 411 Natomiastprotokoacuteł Can over EtherCAT został wybrany ze względu na łatwość jego użytkowa-nia Jego opis znajduje się w sekcji 412
411 Standard EtherCAT
Głoacutewnym założeniem magistrali EtherCAT było osiągnięcie kroacutetkich cykli komuni-kacyjnych (lt 100micros) oraz małych zmian opoacuteźnienia (lt1 micros) aby osiągnąć dokładnąsynchronizację urządzeń podłączonych do sieci Urządzenia w magistrali EtherCATdzielimy na urządzenia podrzędne oraz nadrzędne Urządzenia podrzędne połączoneszeregowo kolejno odbierają pakiet i w locie uzupełniają żądane wartości Następniepaczka przekazywana jest od urządzenia do urządzenia po czym wraca do węzłanadrzędnego
412 Can over EtherCAT
CAN over EtherCAT jest protokołem opartym o mechanizmy zdefiniowane w stan-dardzie CANopen Rcopy (EN 50325-4) Pozwala on na mapowanie elementoacutew danychz urządzeń podrzędnych do obiektoacutew na urządzeniu nadrzędnym Istnieją dwa typyobiektoacutew PDO (Proces Data Object) oraz SDO (Service Data Object) pierwszesłużą do przesyłania danych w czasie rzeczywistym między urządzeniami podrzęd-nymi a nadrzędnym (np przesyłanie pomiaroacutew jednostki inercyjnej) drugi służy doustawień konfiguracyjnych układu W układzie dostępne jest 6 obiektoacutew PDO
Rozdział 4 Opis oprogramowania 23
42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

42 Oprogramowanie MCU
Oprogramowanie MCU wytworzone w ramach niniejszego projektu służy do pośred-niczenia między układem jednostki inercyjnej a modułem Anybus ktoacutery odpowiadaza sprzętową obsługę magistrali ethercat Oprogramowanie pozwalające obsłużyćmaszynę stanoacutew zawartą w module Anybus zostało dostarczone przez producentamodułu i jest opisane w podsekcji 422 Wykonana w tej pracy została więc ta częśćoprogramowania ktoacutera odpowiedzialna jest za komunikację z modułami na pozio-mie sprzętu i jest omoacutewiona w podsekcji 421 Zaimplementowany został roacutewnieżmechanizm obsługi jednostki inercyjnej i mechanizm pozwalający na odpowiedniąobsługę pomiaru w trybie synchronizowanym (Nie znajdował się on w sterownikuponieważ mechanizm ten silnie zależy od wykonywanych zadań) Te dwa ostatniemechanizmy zaimplementowane są za pomocą przerwań opisanych w podsekcji 423
421 Konfiguracja peryferioacutew
Implementacja najniższej warstwy oprogramowania czyli obsługi wejść wyjść mi-krokontrolera może być logicznie podzielona na dwie części Pierwszą z nich jestkonfiguracja wejść wyjść służących do komunikacji z jednostką inercyjną Komunika-cja z jednostką inercyjną odbywa się za pomocą interfejsu SPI oraz dwoacutech sygnałoacutewsterujących Jeden z nich służy jednostce inercyjnej do sygnalizowania że pomiarzostał zakończony drugi zaś służy do zlecenia pomiaru jednostce inercyjnej
Druga porcja wejść i wyjść wykorzystywana jest przez moduł kontroli Ether-CATrsquoa Urządzenie to jest obsługiwane za pomocą magistrali EPI Ta jest skonfiguro-wana tak aby pracować w trybie 8-bitowym z dwunastoma bitami adresu Magistralata działając z prędkością trzydziestu MHz zapewnia maksymalną przepustowość napoziomie 30 MBs Dodatkowo do kontroli układu wykorzystywane są sygnały re-setIRQSYNC Sygnał reset pozwala na wyzerowanie maszyny stanu modułu Any-bus natomiast linia IRQ pozwala modułowi zgłaszać przerwania ostatni sygnałSYNC służy roacutewnież do zgłaszania przerwań Przerwania modułu zgłaszane za po-mocą sygnału IRQ są żądaniami komunikacji najczęściej odczytuzapisu ProcessData odczytu zapisu Service Data czy żądania zmiany stanu modułu np zmianytrybu synchronizacji Przerwanie zgłaszane przez sygnał SYNC jest przerwaniemwskazującym punkt synchronicznego odczytu wejść (inicjacji pomiaru) bądź zapisuwyjść (np zadania wartości na silniki w przypadku gdyby był to sterownik silnikoacuteww obecnej implementacji brak jest wyjść ktoacutere można ustawić)
Z sygnałem SYNC wiąże się kilka pojęć ktoacutere definiują sposoacuteb działania od-czytuzapisu z synchronizacją Pojęcia te zilustrowane są na rysunku 41 a opisaneponiżej
bull Cycle time - czyli minimalny czas całego cyklu działania (w tym przypadkuminimalny czas trwania cyklu to 1 ms)
bull Output Processing Time - minimalny czas przetwarzania danych do wystawie-nia na wyjścia
bull Output Valid - czas od impulsu synchronizacji do ustawienia zadanych danychna wyjściu układu
bull Input Valid - Czas potrzebny od sygnału synchronizacji do czasu pomiaru
24 Rozdział 4 Opis oprogramowania
bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

bull Input Processing Time - czas potrzebny od wykonania pomiaru do wysłaniago do modułu Anybus
Rysunek 41 Zależności czasowe dla sygnału synchronizacji
422 Sterownik Anybus
Drugim elementem oprogramowania jest biblioteka dostarczona przez producentaPomimo że jest to produkt w miarę kompletny to należy go skonfigurować aby dzia-łał w trybie odpowiadającym konfiguracji sprzętowej układu W naszym przypadkużądanym trybem jest komunikacja za pomocą szyny roacutewnoległej (w mikrokontrolerzeEPI) Dzięki temu możemy mapować pamięć modułu dostarczonego przez Anybusdo przestrzeni adresowej procesora co zapewnia nam prostotę w dostępie do zaso-boacutew tego urządzenia Kolejnym ważnym parametrem bez ktoacuterego nie możliwa byłabypraca w trybie synchronizowanego odczytu jest komunikacja za pomocą przerwańPo skonfigurowaniu tego parametru Anybus może zażądać komunikacji z naszymmodułem w odpowiednim dla niego czasie (to moduł Anybus zarządza synchroniza-cją czasu z masterem ethercat)
Wreszcie wymagana jest konfiguracja mapowania obiektoacutew za pomocą ktoacuterychukład przesyła dane
Konfiguracja biblioteki sterownika odbywa się na kilku poziomach Pierwszymz nich jest konfiguracja obiektoacutew za pomocą ktoacuterych będziemy przesyłać dane przezprotokoacuteł COE
Obiekty służące do przesyłania danych między skonstruowanym urządzeniema węzłem nadrzędnym komunikacji ethercat dzielą się na dwa typy Pierwszym z nichjest typ PDO czyli Process Data Object Jest to typ danych służący do komunikacjiw reżimie czasu rzeczywistego W wykonanej aplikacji dostępnych jest sześć obiek-toacutew tego typu Ich spis znajduje się w tabeli 41 Są to oczywiście wartości zmierzonekolejno przyspieszeń liniowych oraz prędkości kątowych Obroacutebka tych danych w mi-krokontrolerze sprowadza się jedynie do rzutowania ich na liczbę całkowitą ze zna-kiem Oznacza to że przyspieszenia wysyłane są w formacie 0333mg (tysięcznychprzyspieszenia ziemskiego) na bit Format prędkości kątowej zależy od konfiguracjiżyroskopu w tym przypadku dostępne są 3 zakresy pomiarowe prędkości kątowejPierwszy to zakres plusmn300s drugi plusmn150s oraz trzeci plusmn75s Pierwsze ustawie-nie wymaga jedynie rejestru opisanego w tabeli 42 jako Gyro range Settings Abyustawić najwyższy zakres pomiaru należy ustawić w tym rejestrze wartość 4 Dla
Rozdział 4 Opis oprogramowania 25
niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

niższych zakresoacutew pomiarowych są to odpowiednio wartości 2 dla zakresu plusmn150soraz 1 dla zakresu plusmn75s Dla utrzymania dokładności zakresy te wymagają roacutew-nież ustawienia filtru cyfrowego Filtr cyfrowy jednostki inercyjnej konfiguruje sięza pomocą pola Digital Filter Settings opisanego w tabeli 42 Dla zakresu plusmn150swartość tego rejestru musi być większa bądź roacutewna 2 a dla zakresu plusmn75s większabądź roacutewna 4
Tablica 41 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa Opis Typ Adres
danychAcceleration X Wartość przyspieszenia w osi X 16b int 0x2065Acceleration Y Wartość przyspieszenia w osi Y 16b int 0x2066Acceleration Z Wartość przyspieszenia w osi Z 16b int 0x2067Rotation Speed X Wartość prędkości kontowej wokoacuteł osi X 16b int 0x2068Rotation Speed Y Wartość prędkości kontowej wokoacuteł osi Y 16b int 0x2069Rotation Speed Z Wartość prędkości kontowej wokoacuteł osi Z 16b int 0x206a
Obiekty typu SDO są obiektami służącymi do niecyklicznej komunikacji z urzą-dzeniem Używa się ich zazwyczaj do konfiguracji urządzenia podrzędnego lub spora-dycznego pobierania od niego informacji W implementacji urządzenia podrzędnegoethercat znajduje się wiele obiektoacutew SDO W większości służą one do konfigura-cji urządzenia SDO zaimplementowane w ramach pracy służą przede wszystkimdo konfiguracji oraz sprawdzania stanu jednostki inercyjnej Są one przedstawionew tabeli 42
Trzy pierwsze z nich to pola umożliwiające odczyt temperatury żyroskopoacutew poje-dynczych osi Dla tych wpisoacutew liczba 0 oznacza 25C a każda kolejna wartość wnosizmianę temperatury o 0 136C Pola te mają możliwość odczytu ale z oczywistychwzględoacutew nie można do nich zapisać Kolejne trzy wpisy w tabeli odwołując się doopcji sprawdzania oraz ustawienia wartości kompensujących odchylenie w pomia-rze żyroskopu Wartości od 7 do 9 to wartości kompensacji odczytu przyspieszenialiniowego
Wartość na pozycji dziesiątej to wartość zmieniająca ustawienia filtroacutew cyfro-wych jednostki inercyjnej Filty cyfrowe jednostki inercyjnej służą do zmniejszeniawpływu zakłoacuteceń na pomiar struktura filtrowania przedstawiona jest na rysunku42(a) na tym schemacie filtr cyfrowy wizualizowany jest przez dwa ostatnie ele-menty w ścieżce przetwarzania sygnału można roacutewnież zauważyć że ustawienie filtru(N) wpływa zaroacutewno na filtrowanie sygnału akcelerometru jak i żyroskopu Usta-wienia opisywanego rejestru są wykładnikiem dla poziomu filtrowania Zwiększonefiltrowanie oproacutecz zmniejszenia wpływu zakłoacuteceń zmniejsza roacutewnież możliwości do-starczenia sygnału o wysokiej częstotliwości Tłumienie filtroacutew roacuteżnych poziomoacutewprzedstawione jest na rysunku 42(b) Na osi pionowej oznaczone jest tłumienie sy-gnału w danej częstotliwości Na osi poziomej oznaczona jest częstotliwość względemczęstotliwości proacutebkowania Przykładowo dla domyślnej częstotliwości proacutebkowania(8192 SPS) przy ustawieniu do obiektu SDO bdquoDigital Filter Settingsrdquo wartości 4 coprzekłada się na poziom filtru roacutewny 16 tłumienie sygnału zaczyna znacznie rosnąćokoło wartości 16 Hz
Kolejna wartość czyli Gyro Range Settings to wpis pozwalający na ustawieniezakresu pomiarowego dla żyroskopu Dostępne są trzy zakresy pomiarowe plusmn75splusmn150s plusmn300s Odpowiadają im wartości odpowiednio 1 2 4 Dla zakresuplusmn75s wymagane jest aby wartość wpisana w pole Digital Filter Settings była
26 Rozdział 4 Opis oprogramowania
Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Tablica 42 Opis Obiektoacutew SDO dostępnych w urządzeniuNazwa Opis Typ da-
nychAdres
Gyro Temperature X Wartość temperatury żyro-skopu w osi X
16b uint 0x21FC
Gyro Temperature Y Wartość temperatury żyro-skopu w osi Y
16b uint 0x21FD
Gyro Temperature Z Wartość temperatury żyro-skopu w osi Z
16b uint 0x21FE
Gyro bias offset X Wartość korekty odchyleniażyroskopu w osi X
16b uint 0x21FF
Gyro bias offset Y Wartość korekty odchyleniażyroskopu w osi Y
16b uint 0x2200
Gyro bias offset Z Wartość korekty odchyleniażyroskopu w osi Z
16b uint 0x2201
Accelerometer bias offset X Wartość korekty odchyleniaakcelerometru w osi X
16b uint 0x2202
Accelerometer bias offset Y Wartość korekty odchyleniaakcelerometru w osi Y
16b uint 0x2203
Accelerometer bias offset Z Wartość korekty odchyleniaakcelerometru w osi Z
16b uint 0x2204
Digital Filter Settings Wartość filtru 16b uint 0x2205Gyro Range Settings Zakres żyroskopu 16b uint 0x2206Autonull Gyro Bias Procedura kalibracji żyro-
skopubool 0x2207
Restore Factory Calibration Przywroacuteć ustawienia fa-bryczne
bool 0x2208
Precision Autonull Bias procedura dokładnej kalibra-cji żyroskopu
bool 0x2209
Product ID Kod produktu 16b uint 0x220ASerial Number Numer seryjny produktu 16b uint 0x220B
nie mniejsza niż 4 dla zakresu plusmn150s jest to odpowiednio 2 Zakres plusmn300s nieposiada takich ograniczeń
AutoNull Gyro Bias obiekt ktoacuterego ustawienie powoduje uruchomienie proce-dury kalibracji parametroacutew Gyro Bias jednostka inercyjna powinna znajdować sięwtedy w bezruchu Kolejna Opcja służy do odzyskiwania ustawień fabrycznych off-setoacutew ale roacutewnież zakresu pomiarowego akcelerometru oraz ustawień wewnętrznegocyfrowego filtru Ostatnie dwie pozycje to numeryczny kod produktu oraz numerseryjny
Drugim mniej abstrakcyjnym poziomem na ktoacuterym należy skonfigurować biblio-tekę dostarczoną wraz z modułem Anybus jest poziom definicji preprocesora w jed-nym z plikoacutew nagłoacutewkowych Służą one do sygnalizacji bibliotece jakie są możliwościkomunikacyjne między mikroprocesorem a modułem Anybus Stałe wykorzystywanew wytworzonym oprogramowaniu przedstawione są w tabeli 43 a listę wszystkichmożliwości konfiguracyjnych można znaleźć w [1]
Po inicjalizacji wejść wyjść procesora program przechodzi do głoacutewnej pętliktoacutera zajmuje się śledzeniem maszyny stanu zawartej w module Anybus a przed-stawionej na rysunku 43 Reszta zadań została oddelegowana do obsługi w prze-rwaniach
Rozdział 4 Opis oprogramowania 27
Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Tablica 43 Opis Obiektoacutew PDO dostępnych w urządzeniuNazwa OpisABCC_USER_MAX_NUM_APPL_CMDS Ilość komend ktoacutere można wysłać bez
otrzymania odpowiedziABCC_USER_MAX_NUM_ABCC_CMDS Ilość komend ktoacutere można odebrać
bez wysłania odpowiedziABCC_USER_MAX_MSG_SIZE Wielkość największej używanej w pro-
gramie odpowiedzi Gdy nie jestznana największa odpowiedź jaka bę-dzie nadawana należy ustawić naj-większa obsługiwaną wartość tj 1524bajty
ABCC_USER_MAX_PROCESS_DATA_SIZE Wielkość największej obiektoacutew PDO
używanych podczas komunikacjiABCC_USER_ERR_REPORTING_ENABLED Odblokowuje funkcję raportującą
błędy (ktoacuterą należy zaimplementowaćw systemie)
ABCC_USER_DEBUG_ERR_ENABLED Odblokowuje wypisywanie informacji
debugujących po wywołaniu funkcjibłędu ABCC_CbfDriverError()
ABCC_USER_DEBUG_PRINT Przypisanie funkcji wypisywania in-formacji debugowych
ABCC_USER_POLL_WRPD Jeżeli stała jest zdefiniowana za każ-dym razem gdy uruchomiona zosta-nie funkcja ABCC_RunDriver() uru-chomiona zostanie roacutewnież funkcjaodświeżająca WRPD Czyli obiektyktoacutere są PDO i są dostępne do za-pisu(odebrania od mastera)
ABCC_USER_DRV_PARALLEL Sterownik będzie używany w trybieroacutewnoległym z obsługą zdarzeniową
ABCC_USER_INT_ENABLED Odblokowuje obsługę przerwań ze-wnętrznych od Anybus
28 Rozdział 4 Opis oprogramowania
Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Nazwa OpisABCC_USER_INT_ENABLE_MASK Określa możliwe typy przerwań wartość jest sumą
logiczą flagABP_INTMASK_RDPDIEN - Odblokowuje czy-tanie PDO w przerwaniuABP_INTMASK_STATUSIEN - Odblokowujesprawdzanie statusu urządzenia w przerwaniuABP_INTMASK_RDMSGIEN - Odblokowujeodczyt wiadomości w przerwaniuABP_INTMASK_WRMSGIEN - Odblokowujezapis wiadomości w przerwaniuABP_INTMASK_ANBRIEN - Odblokowujeprzerwanie zmiany statusu przez moduł Anybus
ABCC_USER_MEMORY_MAPPED_ACCESS Odblokowuje tryb mapowania pamięci Anybus do
przestrzeni adresowej mikrokontrolera co znacznieułatwia komunikację
ABCC_USER_PARALLEL_BASE_ADR Zawiera adres pamięci mapowanej do mikrokon-
trolera (0xA0000000)
(a) Schemat układu filtroacutew cyfrowych Źroacutedło[19]
(b) Wykres tłumienia filtroacutew cyfrowych Źroacutedło[19]
Rysunek 42 Filtry cyfrowe jednostki inercyjnej
Rozdział 4 Opis oprogramowania 29
Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rysunek 43 Maszyna stanu jednostki Anybus Źroacutedło [2]
423 Przerwania
Do mikrokontrolera doprowadzone są 3 linie przerwań zewnętrznych Linia prze-rwania komunikacji modułu Anybus zarządza komunikacją z urządzeniem AnybusSchemat tej procedury przedstawiony jest na rysunku 44 Po odebraniu przerwa-nia na tej linii w pierwszej kolejności odczytywany jest z urządzenia Anybus rejestrmoacutewiący o przyczynie przerwania Gdy ta zostanie ustalona z modułu Anybus od-czytywane są (lub zapisywane) odpowiednie wartości jeżeli zachodzi taka potrzebawywoływane są roacutewnież funkcje specyficzne dla danego typu komunikacji Obsługarożnych typoacutew komunikacji jest dostarczona przez bibliotekę obsługującą modułAnybus
Żądanie komunikacji anybus
Sprawdzenie czy sterownik oczekuje na gotowość anybus do komunikacji
Ustaw Anybus gotowy do komunikacji
[Oczekuje]
Określ typy komunikatoacutew obsługiwanych w przerwaniach
[Nie oczekuje]
Odczytaj typ komunikatu
Czy komunikat obsługiwany w przerwaniuOdbierz komunikat
TakNie
Przetwoacuterz komunikat
Rysunek 44 Obsługa przerwania komunikacji z Anybus
30 Rozdział 4 Opis oprogramowania
Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Druga linia przerwania jest linią pochodzącą od jednostki inercyjnej Sygnałprzerwania na tej linii sygnalizuje możliwość odebrania danych Procedura odbie-rania danych wykonuje się roacutewnież w przerwaniu dzieje się tak ponieważ ważnejest natychmiastowy ich odbioacuter i przepisanie do odpowiednich adresoacutew skąd zostanąwysłane do modułu Anybus co pokazane jest na schemacie 45
Dane dostępne Zablokuj przerwania Odczytaj dane Odblokuj przerwania
Rysunek 45 Obsługa przerwania komunikacji z jednostką inercyjną
Ostatnią linią przerwania jaka została doprowadzona do mikrokontrolera jest li-nia sygnału SYNC przedstawiona na rysunku 46 Sygnał ten jest odpowiedzialny zaobsługę mechanizmoacutew związanych z komunikacją synchroniczną Ponieważ w przed-stawianej aplikacji nie występują sygnały wyjściowe do wysterowania zaimplemen-towana jest tylko część odpowiadająca za pozyskanie pomiaru z jednostki inercyjnejProcedura przerwania wygląda tak jak na rysunku
Żądanie synchronizacji Czy czas Input Valid jest zerowy
Konfiguruj Timer
Nie
Tak
Uruchom Timer
Timer zakończył odliczanie
Zleć Pomiar do IMU
Rysunek 46 Obsługa przerwania sygnału synchronizacji
Pierwszym krokiem procedury obsługi przerwania jest sprawdzenie czy czas In-put Valid jest zerowy (domyślnie jest ustawiany na 0) jeżeli jest inaczej urucha-miamy Timer w trybie pojedynczego zliczania na czas Input Valid Jeżeli czas tenjest zerowy lub bo odliczeniu czasu za pomocą timera zlecamy pomiar jednostceinercyjnej Zlecenie pomiaru wygląda w następujący sposoacuteb Najpierw ustawiamysygnał zlecenia pomiaru w stan wysoki następnie ustawiamy Timer na odliczenie 5us i opuszczamy przerwanie w ktoacuterym byliśmy (przerwanie może pochodzić z sy-gnału SYNC lub timera inicjowanego gdy czas Input Valid jest roacuteżny od zera) Poodliczeniu pięciu mikro sekund Timer wywoła przerwanie w ktoacuterym sygnał zleceniapomiaru ustawiamy na poziomie niskim i opuszczamy przerwanie
43 Sterownik w strukturze OROCOS
Druga część oprogramowania została napisana w celu skomunikowania pomiędzymagistralą ethercat a innymi programami działającymi w ramach struktury ramo-wej ROS i OROCOS Jest to prosty sterownik działający w strefie użytkownikaoraz opierający się o pakiet ec_hardware zawierający się w oprogramowaniu ir-pOS Pakiet ec_hardware jest sterownikiem dostosowanym do użycia przez sys-tem OROCOS Klasa sterownika jednostki inercyjnej dziedziczy po klasie ECDri-
Rozdział 4 Opis oprogramowania 31
ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

ver co pozwala na komunikację z programem mastera Ethercat oraz na tworze-nie jego instancji podczas działania systemu przez komponent nazywający się roacutew-nież ECHardware Najważniejsze zadania sterownika przedstawione zostały w li-stingu 41 Pierwsza z nich nosi nazwę configureHook jest to funkcja uruchamianapodczas konfiguracji usług oprogramowania OROCOS ta funkcja w pierwszej kolej-ności przypisuje obiekty adresom PDO (inicjalizacja adresoacutew odbywa się w konstruk-torze) po czym wczytuje z przekazanej jej konfiguracji parametry zakresu pomiaro-wego oraz ustawień filtru zapisuje mnożnik prędkości kątowej i wysyła konfiguracjedo urządzenia Wartości uruchomieniowe tych parametroacutew znajdują się w pliku o roz-szerzeniu YAML o nazwie master_configyaml Druga funkcja uruchamiana w każ-dym cyklu sterowania ma za zadanie pobrać wartości mierzone z jednostki inercyjnejNastępnie dokonuje konwersji do formatu [ms2] zapisuje do obiektu wiadomościstandardowego typu sensor_msgsImu Typ tej wiadomości jest standardowym ty-pem znajdującym się w systemie ROS służącym do opisywania pomiaroacutew jednostekinercyjnych Przed wysłaniem wiadomości na specjalny temat zostaje ona opatrzonastemplem czasowym co umożliwia poacuteźniejsza identyfikację momentu otrzymania da-nych nawet poza środowiskiem czasu rzeczywistego jakie zapewnia OROCOS Pouruchomieniu sterownika jego działanie przedstawione na rysunku 47 sprowadza siędo odpytywania za pomocą mastera ethercata jednostki inercyjnej o dane oraz eks-portowaniu tych danych do środowiska ROS dla dowolnego podsystemu sterowaniado użycia
Listing 41 prototypy kluczowych funkcji sterownika imubool IMUDriver conf igureHook ( const YAML Node ampc fg ) uint16_t range = 0x2 uint16_t f i l t e r = 0x4 rangeSca l e = Pre150degpsec
thisminusgtaddPDOEntry(ampacceleration_x_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_y_pdo_ ) thisminusgtaddPDOEntry(ampacceleration_z_pdo_ ) thisminusgtaddPDOEntry(amprotation_x_pdo_ ) thisminusgtaddPDOEntry(amprotation_y_pdo_ ) thisminusgtaddPDOEntry(amprotation_z_pdo_ ) thisminusgtaddPDOEntry(ampcontrol1_pdo_ )
i f ( c f g [ range ] ) range = c fg [ range ] asltint gt()i f ( range==1)rangeSca l e = Pre75degpsec i f ( range==2)rangeSca l e = Pre150degpsec i f ( range==4)rangeSca l e = Pre300degpsec
i f ( c f g [ f i l t e r ] ) f i l t e r = c f g [ f i l t e r ] asltint gt()
slave_minusgtaddSDOConfig (0 x2205 0 f i l t e r ) slave_minusgtaddSDOConfig (0 x2206 0 range ) return true
32 Rozdział 4 Opis oprogramowania
void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

void IMUDriver updateInputs ( ) int16_t ax ay az rx ry rz sensor_msgs Imu wr
ax = acceleration_x_pdo_ read ( ) ay = acceleration_y_pdo_ read ( ) az = acceleration_z_pdo_ read ( )
rx = rotation_x_pdo_ read ( ) ry = rotation_y_pdo_ read ( ) r z = rotation_z_pdo_ read ( )
wr l i n e a r_a c c e l e r a t i o n x = ( static_castltdoublegt(ax ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n y = ( static_castltdoublegt(ay ) accSca l e )lowast g wr l i n e a r_a c c e l e r a t i o n z = ( static_castltdoublegt(az ) accSca l e )lowast g
wr angu la r_ve loc i ty x = static_castltdoublegt(rx ) rangeSca l e wr angu la r_ve loc i ty y = static_castltdoublegt(ry ) rangeSca l e wr angu la r_ve loc i ty z = static_castltdoublegt(rz ) rangeSca l e
wr header stamp = rt t_ro s c l o ck host_now ( ) port_imu_msr_outport_ wr i t e (wr )
Podsystem sterowania
Jednostka inercyjna rzeczywisty
receptor
OROCOSowySterownik IMU
Ethercat Master
ROS
OROCOSWirtualny receptor
Jednostka inercyjna
Rysunek 47 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej
Rozdział 4 Opis oprogramowania 33
34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

34 Rozdział 4 Opis oprogramowania
Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Rozdział 5
Badania weryfikacyjne
Weryfikacja działania układu została przeprowadzona z użyciem robota IRP-6 bę-dącego na wyposażeniu laboratorium Zespołu Programowania Robotoacutew i SystemoacutewRozpoznających działającego na Wydziale Elektroniki i Technik Informacyjnych Po-litechniki Warszawskiej [14] Środowisko eksperymentalne wykorzystane na potrzebytej pracy opisane jest w sekcji 51 Następnie w sekcji 52 omoacutewiony zostanie projektoraz cel przeprowadzonych eksperymentoacutew Wyniki eksperymentoacutew opisane w sek-cji 53 rzucą nieco światła na możliwości zbudowanego układu Wreszcie w sekcji54 podsumujemy wyniki eksperymentoacutew oraz zaznaczymy mocne i słabsze stronyzbudowanego układu
51 Opis stanowiska eksperymentalnego
Jednostka inercyjna została zamontowana na ramieniu robota irp6 Jest to roboto siedmiu stopniach swobody dzięki dodatkowemu torowi jezdnemu Robot ten jestroacutewnież wyposażony w nadgarstkowy czujnik siły Uproszczony schemat manipula-tora wraz z zbliżeniem na miejsce montowania jednostki inercyjnej przedstawionyjest na rysunku 51 Robot ten sterowany jest za pomocą komputera PC komunikują-cego się ze sterownikami silnikoacutew za pomocą magistrali Ethercat oraz protokołu CanOver Ethercat Sterowanie odbywa się pod kontrolą oprogramowania IRpOS [13]Oprogramowanie to można potraktować jako wirtualny receptor bądź jako oprogra-mowanie warstwy abstrahującej sprzęt Częstotliwość pętli sterowania robota to 500[Hz] pomiar przyspieszeń za pomocą jednostki inercyjnej oraz pomiar sił odbywasię w każdym cyklu pętli sterowania
52 Projekt eksperymentoacutew
Eksperymenty zaprojektowane oraz przeprowadzone na robocie irp6 miały na celuweryfikację działania układu sprawdzenie wpływu filtrowania sygnału na odczytyjednostki inercyjnej oraz sprawdzenie przydatności tego układu do zadania korekcjiodczytu siły w czujniku nadgarstkowym robota na ktoacuterym został zainstalowany
Do badań użyto dwoacutech typoacutew trajektorii testowych Obie z nich zakładały stałąorientację końcoacutewki robota tak aby oś Z chwytaka skierowana była w doacuteł jak narysunku 52
Trajektoria typu pierwszego była zaplanowana tak aby z osobna we wszystkichosiach poruszać końcoacutewką robota po sinusoidzie następnie po kilku okresach sinusazatrzymać się i natychmiast zacząć odtwarzać ten ruch w drugą stronę Trajektoria
Rozdział 5 Badania weryfikacyjne 35
2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

2
20
Wrist(W)
Sensor(S)
Base(0)
ZX
Gripper
(G)
Z
IMU(M)
Force
Rysunek 51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20]
typu drugiego polegała na poruszaniu się po okręgu leżącym kolejno w płaszczy-znach yz xy xz i tak jak poprzednio po wykonaniu kilku okręgoacutew końcoacutewka masię zatrzymać i zacząć poruszać się w drugą stronę a potem przejść do kolejnejpłaszczyzny
Zaplanowane trajektorie nie zmieniały orientacji chwytaka (a także czujnika siłyi jednostki inercyjnej) co pozwoliło na założenie że wektor przyspieszenia grawita-cyjnego działa w kierunku i ze zwrotem zgodnym z wersorem Z6 Ponieważ jednostkainercyjna ma inną orientację niż czujnik siły pomiar musi zostać poddany przekształ-ceniu ktoacutere pokazane jest we wzorach 51 52 Następnie należało usunąć wpływgrawitacji na pomiar przyspieszenia co pokazują wzory 53 54
R =
0 0 10 minus1 01 0 0
(51)
Ag = R lowast Ai (52)
G =
00g
(53)
Agg = Ag minusG (54)
Następnym krokiem testowania było sprawdzenie czy odczytane w ten sposoacuteb danemogą posłużyć do korekcji siły Model estymowanej siły jest przedstawiony we wzo-rze 55 Aby to stwierdzić należy najpierw ustalić masę tej części chwytaka ktoacuteraznajduje się za czujnikiem siły (w kierunku i o zwrocie osi Z6) Estymacja ta zostaładokonana za pomocą najmniejszych kwadratoacutew Według liniowej wersji tej metodymasę można wyznaczyć ze wzoru 56 Gdzie As to wektor wybranych pomiaroacutew
36 Rozdział 5 Badania weryfikacyjne
przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

przyspieszenia w wybranej osi a Fo jest wektorem siły mierzonej w odpowiedniejosi oraz odpowiadających pomiarom przyspieszenia Każdy z pomiaroacutew ma stem-pel czasowy mierzony w nanosekundach Z tego powodu do obliczeń używany byłostatni dostępny pomiar przyspieszenia (dla każdego pomiaru siły)
Fest = minusm lowast Agg (55)
m = minus(ATs lowast As)
minus1 lowast ATs lowast Fo (56)
Z6
X6Y6
Rysunek 52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej
53 Wyniki eksperymentoacutew
Przedstawione w tej sekcji wyniki opierają się na trzech seriach pomiarowych prze-prowadzonych z udziałem czujnika siły oraz jednostki inercyjnej Pełne przebiegi dlatych serii można zobaczyć w dodatku B Na wykresach 53 54 55 przedstawionezostały pomiary z czujnika siły w osi x oraz pomiary jednostki inercyjnej roacutewnieżw osi x (po obroacuteceniu układu wspoacutełrzędnych) kolejnych serii pomiarowych Pierw-sza z nich 53 jest pobrana z użyciem trajektorii typu pierwszego opisanej w sekcji52 oraz z ustawieniami filtru jednostki inercyjnej na minimalnym poziomie (war-tość pola Digital Filter Settings roacutewna 1) Odczyt ten nosi widoczne ślady podziałuna trzy części ( ich granice znajdują się w okolicach 21 i 42 sekundy pomiaru)Pierwsza z tych części to ta w ktoacuterej robot porusza końcoacutewką wzdłuż osi w ktoacuterejwykonywany jest pomiar widoczny tam jest wyraźnie działanie wpływu siły iner-cyjnej związanej z zadaną trajektorią Około dziesiątej sekundy pomiaru występujeznaczny skok zmierzonej siły jest to efekt nagłej zmiany kierunku poruszania sięrobota Druga sekcja jest okresem w ktoacuterym robot poruszał się wzdłuż osi y w tejsekcji nie występują znaczne skoki mierzonej (w osi x) wartości siły ani przyspie-szenia Trzecia sekcja pokazuje wzrost wartości mierzonych na obu sensorach co
Rozdział 5 Badania weryfikacyjne 37
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
oznacza że ruch w osi z nie jest idealnie odseparowany od ruchu w osi x Druga seriapomiarowa 54 oparta została o taką samą trajektorię Jedyną roacuteżnicą było tu zasto-sowanie większej wartości filtrowania dla jednostki inercyjnej (wartość pola DigitalFilter Settings roacutewna 4) W tym przypadku widać że choć sekcja druga i trzeciapomiaru w przypadku czujnika siły wygląda niemali identycznie jak w poprzednimprzykładzie to pomiar uzyskany z jednostki inercyjnej jest praktycznie zerowy Filtrusunął większość sygnału wysokoczęstotliwościowego ktoacutery pojawiał się w poprzed-nim przykładzie Sytuacja ta miała roacutewnież wpływ na usunięcie znacznej części pikuwystępującego w okolicach dziesiątej sekundy pomiaru Oznacza to że pomiar niejest przydatny do korekcji odczytu siły ponieważ w tym zadaniu potrzebny jest od-czyt umożliwiający stwierdzenie piku pochodzącego na przykład z zatrzymania sięmanipulatora Dlatego też w dalszej części rozważań przyjrzymy się jedynie pomia-rom zebranym z niskim ustawieniem poziomu filtracji sygnału Trzecia seria 55 jestserią testową Ponieważ w każdym momencie ruchu końcoacutewka robota porusza sięw dwoacutech osiach wyznaczenie siły korygującej siłę inercyjną powinno być znacznietrudniejsze Decydujące dla wynikoacutew pracy jest stwierdzenie czy pomiar pochodzącyz jednostki inercyjnej jest na tyle szybki aby niwelować piki pomiaru siły takie jakpokazane w powyższych przykładach
Wyznaczenie masy chwytaka odbyło się za pomocą danych z każdej osi pierwszejprzedstawionej serii pomiarowej Dane wybrane do wyznaczania masy chwytaka zo-stały wybrane tak aby zmniejszyć udział szumoacutew pomiarowych w tym procesie Więcw danej osi zostały uwzględnione jedynie pomiary gdy robot poruszał się wzdłuż tejosi (od t = 0s do t asymp 21s z osi x t asymp 21s do t asymp 42s z osi y t asymp 42s do t asymp 65s z osiz) W ten sposoacuteb masa została oszacowana na m asymp 13547[kg]
Dzięki aproksymacji masy chwytaka możliwe było wyznaczenie siły bezwładnościjaka powinna na niego działać na podstawie pomiaroacutew jednostki inercyjnej Pierw-szym przykładem jest obliczenie i korekcja odczytu siły podczas ruchu wzdłuż osi x56 Na rysunku 56(a) widać że przebieg ktoacutery w idealnych warunkach powinienbyć sinusoidą jest w pewnym stopniu zniekształcony Jednak estymowana siła poka-zana na rysunku 56(b) roacutewnież posiada sporą dozę zakłoacuteceń Zakłoacutecenia te w dużejczęści nie wynikają z szumu własnego czujnika tylko ze sposobu sterowania mani-pulatorem Na przykład duża doza tego szumu ma okres około 50[ms] co odpowiadaokresowi zadawania kolejnych punktoacutew docelowych przez skrypt generujący trajek-torie Roacuteżnica tych dwoacutech sił pokazana jest na rysunku 56(c) Na tym rysunku od
38 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres oczytu przyspieszenia w osi x
Rysunek 54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Wykres odczytu siły w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) Wykres odczytu przyspieszenia w osi x
Rysunek 55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej
Rozdział 5 Badania weryfikacyjne 39
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(a) Siła zmieżona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(b) Siła obliczona w osi x
czas (ns) 109
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
(c) Siła skorygowana w osi x
Rysunek 56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
44 46 48 5 52 54 56 58 6 62 64-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 57 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y
razu można zobaczyć że amplituda sygnału znacznie spadła maksymalna wartośćw tej sekcji spadła z 3 [N] do 15 [N]
Kolejnym ciekawym przykładem jest ten część trajektorii w ktoacuterej robot poruszasię po płaszczyźnie prostopadłej do osi x w ktoacuterej pomiar przedstawiamy W tymprzykładzie wydaje się że siła estymowana jest niedoszacowana co widać szczegoacutelniew skokach siły takich jak ta w t = 64s
Przykładem dobitnie pokazującym że sam układ jest na tyle szybki aby zniwelo-wać skoki siły bezwładności spowodowane sterowaniem robota jest ten widoczny narysunku 58 Na rysunku przedstawiającym silę odczytaną z nadgarstkowego czuj-nika siły 58(a) widać jak duże wartości może osiągać siła bezwładności w kroacutetkimczasie W tym przypadku siła estymowana 58(b) ma bardzo podobne wartości dotych zmierzonych z czego wynika siła skorygowana ktoacutera swoacutej pik ma na pozio-mie minus5[N ] W miejscu w ktoacuterym oryginalny odczyt siły wynosił minus15[N ] co dajeredukcję o około 66
Następne dwa przykłady pochodzą nie z trajektorii uczącej lecz z trajektoriitestowej ktoacutera przedstawiona została na rysunku 55 Przykład ten (widoczny narysunku 59) obejmuje okres od 27 do 32 sekundy pomiaru i jak wszystkie inne zostałon pobrany z danych z osi x N fragment ruchu po płaszczyźnie XY oraz momentzatrzymania robota Siła estymowana (rysunek 59(b)) roacuteżni się od siły zmierzonej(rysunek 59(a)) niedoszacowanymi skokami siły w momencie zatrzymania się ro-bota co najlepiej widać na wykresie siły skorygowanej 59(c) Oproacutecz tego roacuteżnicesą niewielkie
Ostatni przykład(rysunek B3) to pochodzący z między 54 a 55 sekundy po-miar W tej sekcji sygnał jest silnie zakłoacutecany przez sprzężenia z ruchu w drugiejosi Pomiar siły przedstawiony dla tego segmentu na rysunku B3(g) jest na tylezniekształcony że posiada pik o wartości prawie 5[N ] tam gdzie powinno być jego
40 Rozdział 5 Badania weryfikacyjne
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
101 102 103 104 105 106 107 108 109-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 58 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-niu manipulatora
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(b) Siła obliczona w osi x
czas (ns) 1010
28 285 29 295 3 305 31 315 32-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
Rysunek 59 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xywraz z momentem zatrzymania manipulatora
minimum Siła estymowana (a więc roacutewnież pomiar przyspieszenia) przedstawionana rysunku B3(h) zdaje się być mniej obciążona tym zakłoacuteceniem co widać nawykresie siły skorygowanej (rysunek B3(i)) ta posiada maksima lokalne tam gdziepowinny być minima trajektorii W tej części trajektorii maksymalne pomiary siłzmniejszyły się nieznacznie w stosunku do wartości zmierzonych
Przedstawione przykłady wskazują na to że jednostka inercyjna może być zasto-sowana do zadania korekcji odczytu siły (lub odczytu siły uogoacutelnionej) czujnika nad-garstkowego Są to jednak jedynie przykłady działania w poszczegoacutelnych sytuacjachW tabeli 51 przedstawiono zaś statystykę dotyczącą całych trajektorii Wartości teoparte są o długość wektoroacutew siły zmierzonej oraz skorygowanej Biorą one więc poduwagę wszystkie trzy osie w ktoacuterych dokonany był pomiar Trajektoria pierwsza tota przedstawiona na rysunku 53 jako że służyła ona do wyznaczenia parametrumasy chwytaka robota spodziewane było znaczne poprawienie odczytu siły Okazuje
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(a) Siła zmieżona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(b) Siła obliczona w osi x
czas (ns) 1010
55 555 56 565 57 575-5
-4
-3
-2
-1
0
1
2
3
4
5
(c) Siła skorygowana w osi x
Rysunek 510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz
Rozdział 5 Badania weryfikacyjne 41
się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

się że roacuteżnica wartości średniej siły w tej serii pomiarowej spadła o nieco ponad 05[N] Pomimo niewielkiego jak by się mogło wydawać jej spadku średnia wartość wy-nosi niewiele ponad 1 [N] Inaczej sprawa ma się co do wartości maksymalnej bo tuwyniki wskazują na dużą poprawę bo spadek ma wartość około 93 [N] Trajektoriadruga to ta przedstawiona na rysunku 55 Musimy zauważyć że ze względu na ruchwzdłuż dwoacutech osi wartość średnia pomiaru jest większa a maksymalna jest prawieidentyczna W tym przypadku spadek wartości średniej w skorygowanym odczyciesiły wynioacutesł około 074 [N] czyli nieco więcej niż w trajektorii pierwszej Roacuteżnica sił(zmierzonej i skorygowanej) maksymalnych wynosi natomiast około 8 [N] to wyniknieco mniejszy niż w przebiegu pierwszym
Tablica 51 Statystyka dotycząca długości wektoroacutew siłyNazwa opisywanej wartości Trajektoria 1 Trajektoria 2Średnia długość wektora siły zmierzonej 16219 21895Średnia długość wektora siły skorygowanej 11002 14455Maksymalna długość wektora siły zmierzonej 245354 245398Maksymalna długość wektora siły skorygowanej 152327 164627
54 Podsumowanie
W ostatnich latach dzięki eksplozji dostępnej mocy obliczeniowej w robotyce moż-liwa jest implementacja coraz bardziej skomplikowanych pętli sterowania Wrazz tym otwierają się możliwości dla przetwarzania coraz większej ilości danych Za-chęca to do konstruowania systemoacutew robotycznych pozwalających na większą inte-rakcję z otoczeniem Do tworzenia takich systemoacutew potrzebne są rozwiązania sprzę-towe oraz programowe pozwalające na przewidywalną komunikacje wraz z możliwo-ścią synchronizacji momentu pomiaru Takie urządzenia choć pojawiają się to przedewszystkim w segmencie serwo-sterownikoacutew Rynek czujnikoacutew szczegoacutelnie z interfej-sem EtherCat jest wciąż wąski
W ramach tej pracy został zaprojektowany zrealizowany oraz oprogramowanyukład pośredniczący w komunikacji między jednostką inercyjną a kontrolerem urzą-dzenia podrzędnego magistrali EtherCAT
Przeprowadzono badania dowodzące że wykonany układ ma możliwości aby byćzastosowany do korekcji pomiaru siły w czujniku nadgarstkowym robota Wyniki ba-dań potwierdzają przydatność układu do zadania korekcji pomiaru siły Układ zacho-wuje się stabilnie istnieje możliwość przeprowadzania pomiaroacutew w sposoacuteb synchro-nizowany jest łatwy w integracji z systemem robotycznym dzięki standardowemusposobowi komunikacji Minusem tego rozwiązania jest koszt układu potrzebnegodo komunikacji EtherCAT
42 Rozdział 5 Badania weryfikacyjne
Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Bibliografia
[1] HMS Industrial Networks AB Anybus CompactCom 40 Driver User ManualDocId HMSI-27-225
[2] HMS Industrial Networks AB Anybus CompactCom B40 Design Gu-ide httpwwwanybuscomuploadAnybus-CompactCom20B4020Brick-4697-Anybus_CompactCom_B40_design_guidepdf
[3] Minhang Bao Analysis and design principles of MEMS devices Elsevier 2005
[4] C Boucher A Lahrech J-C Noyer Non-linear filtering for land vehicle naviga-tion with gps outage Systems Man and Cybernetics 2004 IEEE InternationalConference on wolumen 2 strony 1321ndash1325 IEEE 2004
[5] Yongming Chen Hua Chen Mingzhong Zhang Yin Li The relevant researchof coe protocol in ethercat industrial ethernet Intelligent Computing and In-telligent Systems (ICIS) 2010 IEEE International Conference on wolumen 2strony 67ndash70 IEEE 2010
[6] Javier Gaacutemez Garciacutea Anders Robertsson Juan Goacutemez Ortega Rolf Johans-son Force and acceleration sensor fusion for compliant robot motion controlRobotics and Automation 2005 ICRA 2005 Proceedings of the 2005 IEEEInternational Conference on strony 2709ndash2714 IEEE 2005
[7] Ethercat Technology Group Ethercat Slave Implementation Gu-ide httpwwwethercatorgpdfenglishETG2200_V2i0i0_SlaveImplementationGuidepdf
[8] Jiho Han Deog-Kyoon Jeong A practical implementation of ieee 1588-2008transparent clock for distributed measurement and control systems IEEEtransactions on instrumentation and measurement 59(2)433ndash439 2010
[9] Texas Instruments Incorporated TivaTM TM4C1294NCPDT Microcontrol-ler DATA SHEET httpwwwticomlitdssymlinktm4c1294ncpdtpdf
[10] Bartosz Kaczor Budowa platformy mobilnej o napędzie roacuteżnicowym Bachelorrsquosthesis WEiTI 2015
[11] ARM Ltd Specyfikacja złącz Jtag httpinfocenterarmcomhelptopiccomarmdocfaqsattached13634cortex_debug_connectorspdf
[12] Robert P Moeller William K Burns Low noise fiber gyroscope system whichincludes excess noise subtraction Lipiec 19 1994 US Patent 5331404
Bibliografia 43
[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

[13] Warsaw University of Technology IRpOS software wiki page httpsgithubcomRCPRG-ros-pkgirp6_robotwiki
[14] Warsaw University of Technology Robot Programing and Pattern RecognitionGroup httprobotykaiapwedupl
[15] Ruxandra Lupas Scheiterer Chongning Na Dragan Obradovic Guumlnter SteindlSynchronization performance of the precision time protocol in industrial auto-mation networks IEEE Transactions on Instrumentation and Measurement58(6)1849ndash1857 2009
[16] NXP Semiconductors UM10204 I2C-bus specification and user manual httpwwwnxpcomdocumentsuser_manualUM10204pdf
[17] Jakub Simanek Michal Reinstein Vladimir Kubelka Evaluation of the ekf-based estimation architectures for data fusion in mobile robots IEEEASMETransactions on Mechatronics 20(2)985ndash990 2015
[18] Salah Sukkarieh Low cost high integrity aided inertial navigation systems forautonomous land vehicles Praca doktorska The University of Sydney 2000
[19] Linear Technology ADIS16362 data sheet httpwwwanalogcommediaentechnical-documentationdata-sheetsADIS16362pdf
[20] Tomasz Winiarski Konrad Banachowicz System akwizycji skorygowanej siłyuogoacutelnionej kontaktu robota manipulacyjnego z otoczeniem Pomiary Automa-tyka Robotyka (2)390ndash394 2013 The acquisition system of general force ofcontact between robotic manipulator and the environment (in Polish)
44 Bibliografia
Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Spis rysunkoacutew
21 Schematy przedstawiające strukturę ramki w komunikacji ethercat 12
31 Wizualizacja płytek 1532 Rysunek płytki głoacutewnej wraz z podanymi wymiarami 1633 Wizualizacja płytek 1734 Standard numeracji na złączu międzypłytkowym 1835 Schemat złącza zasilania 1936 Numeracja pinoacutew oraz położenie złącz na płytce 1937 Schemat złącza jtag 2038 Numeracja złącza hosta źroacutedło [2] 20
41 Zależności czasowe dla sygnału synchronizacji 2542 Filtry cyfrowe jednostki inercyjnej 2943 Maszyna stanu jednostki Anybus Źroacutedło [2] 3044 Obsługa przerwania komunikacji z Anybus 3045 Obsługa przerwania komunikacji z jednostką inercyjną 3146 Obsługa przerwania sygnału synchronizacji 3147 Komunikacja OROCOSrsquoowego sterownika jednostki inercyjnej 33
51 Schemat maniulatora IRP6 wraz z miejscem montowania jednostkiinercyjnej Źroacutedło [20] 36
52 Schemat manipulatora IRP6 w pozycji początkowej do trajektorii te-stowej 37
53 Trajektoria typu pierwszego z minimalnym ustawieniem filtrowaniaw jednostce inercyjnej 38
54 Trajektoria typu pierwszego ze średnim ustawieniem filtrowania w jed-nostce inercyjnej 39
55 Trajektoria typu drugiego z minimalnym ustawieniem filtrowania w jed-nostce inercyjnej 39
56 Część trajektorii uczącej pokazująca ruch wzdłuż osi x 4057 Część trajektorii uczącej pokazująca wibracje związane z ruchem osi y 4058 Część trajektorii uczącej pokazująca skok siły przy nagłym zatrzyma-
niu manipulatora 4159 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xy
wraz z momentem zatrzymania manipulatora 41510 Część trajektorii weryfikującej pokazująca ruch po płaszczyźnie xz 41
B1 Trajektoria ucząca z minimalnym zastosowaniem filtru 58B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu 59B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru 60
Spis rysunkoacutew 45
46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

46 Spis rysunkoacutew
Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Spis tablic
31 Opis podłączeń do jednostki inercyjnej 1632 Opis podłączeń w złączu międzypłytkowym 1833 Opis połączeń złącza zasilania 1934 Opis połączeń złącza EtherCAT 2035 Opis połączeń złącza EtherCAT 21
41 Opis Obiektoacutew PDO dostępnych w urządzeniu 2642 Opis Obiektoacutew SDO dostępnych w urządzeniu 2743 Opis Obiektoacutew PDO dostępnych w urządzeniu 28
51 Statystyka dotycząca długości wektoroacutew siły 42
Spis tablic 47
48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

48 Spis tablic
Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Spis Dodatkoacutew
Dodatek A 51
Dodatek B 57
Spis tablic 49
50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

50 Spis tablic
Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Dodatek A
Schematy modułoacutew urządzenia
Dodatek A Schematy modułoacutew urządzenia 51
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
A
nybu
s-B
ase
SchD
ocD
raw
n B
y
~RES
ET10
3
A0
~WEH
DIP
1_0
104
A1
DIP
1_1
105
A2
DIP
1_2
106
A3
DIP
1_3
107
A4
DIP
1_4
109
A5
DIP
1_5
110
A6
DIP
1_6
111
A7
DIP
1_7
112
A8
~LD
~SS
113
A9
SCLK
115
A10
DO
MIS
O11
6
A11
DIM
OSI
117
A12
ASM
_RX
119
A13
ASM
_TX
120
D7
DIP
2_7
121
D6
DIP
2_6
122
D5
DIP
2_5
123
D4
DIP
2_4
125
D3
DIP
2_3
126
D2
DIP
2_2
127
D1
DIP
2_1
129
MD
013
0D
0D
IP2_
013
1O
M0
132
OM
113
3
OM
213
5~C
S13
6~W
E~W
ELC
T13
7~I
RQ
PA
138
~OE
139
~LED
4AD
1514
1~L
ED4B
D14
142
~LED
3AD
1314
3
~LED
3BD
1214
5LE
D2A
D11
146
LED
2BD
1014
7LE
D1A
D9
148
LED
1BD
814
9
RX
ASM
_RX
151
TXA
SM_T
XO
M3
152
MI1
153
MI0
SY
NC
154
Hos
t Con
nect
or
B Any
bus_
CC
_B40
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
Dat
aBus
Pin
sU
1E
TM4C
1292
NC
PDTI
3R
PA6
40
PA7
41
PG0
49PG
150
PB3
92
PQ0
5
PQ1
6
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PP2
103
Adr
esB
us P
ins
U1F
TM4C
1292
NC
PDTI
3R
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7A
0A
1A
2A
3A
4A
5A
6A
7A
8A
9A
10A
11A
12A
13
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
PA0
33
PA1
34
PB0
95
U1A
TM4C
1292
NC
PDTI
3R
GN
D
R33
10k
R34
10k
R35
10k
Any
bus
Page
15
Any
bus
uC c
onne
ctio
n
1
Bar
osz
Kac
zor
1
4
PI0103
PI0104
PI0105
PI0106
PI0107
PI0109
PI0110
PI0111
PI0112
PI0113
PI0115
PI0116
PI0117
PI0119
PI0120
PI0121
PI0122
PI0123
PI0125
PI0126
PI0127
PI0129
PI0130
PI0131
PI0132
PI0133
PI0135
PI0136
PI0137
PI0138
PI0139
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
COB
PIR3301 PIR3302 CO
R33
PIR3401 PIR3402 COR34
PIR3501 PIR3502 CO
R35
PIU1033
PIU1034
PIU1095 COU1
A
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
COU1
E PIU105
PIU106
PIU1040
PIU1041
PIU1049
PIU1050
PIU1075
PIU1076
PIU1077
PIU1078
PIU1081
PIU1082
PIU1083
PIU1084
PIU1085
PIU1092
PIU10103
COU1
F
PI0104
PIU1040
NLA0
PI0105
PIU1041
NLA1
PI0106
PIU1050
NLA2
PI0107
PIU1049
NLA3
PI0109
PIU1075
NLA4
PI0110
PIU1076
NLA5
PI0111
PIU1077
NLA6
PI0112
PIU1078
NLA7
PI0113
PIU1081
NLA8
PI0115
PIU1082
NLA9
PI0116
PIU1083
NLA10
PI0117
PIU1084
NLA11
PI0119
PIU105
NLA12
PI0120
PIU106
NLA13
PI0131
PIU1018
NLD0
PI0129
PIU1019
NLD1
PI0127
PIU1020
NLD2
PI0126
PIU1021
NLD3 PI0125
PIU1022
NLD4
PI0123
PIU1023
NLD5 PI0122
PIU1024
NLD6
PI0121
PIU1025
NLD7
PIR3301 PIR3401
PIR3501
PI0103
PIU1033
PI0130
PI0132
PIR3302
PI0133
PIR3402
PI0135
PIR3502
PI0136
PIU1085
PI0137
PIU10103
PI0138
PIU1095
PI0139
PIU1092
PI0141
PI0142
PI0143
PI0145
PI0146
PI0147
PI0148
PI0149
PI0151
PI0152
PI0153
PI0154
PIU1034
52 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
C
onne
ctor
sSch
Doc
Dra
wn
By
PQ2
11
PQ3
27
PQ5
57
PQ6
58
PM7
71PM
672
PM5
73PM
474
PL5
86
PL7
93PL
694
PQ4
102
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
TM4C
1292
NC
PDTI
3R
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12PE
213
PE1
14PE
015
PH0
29
PH1
30
PH2
31
PH3
32
PA2
35
PA3
36
PA4
37
PA5
38
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG2
51
PG3
52
PG4
53
PG5
54
PG6
55
PG7
56
PK7
59PK
660
PK5
61PK
462
PB2
91PB
196
PC3_
TDO
_SW
O97
PC2_
TDI
98PC
1_TM
S_SW
DIO
99PC
0_TC
K_S
WC
LK10
0
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1G
TM4C
1292
NC
PDTI
3R
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PH0
PH1
PH2
PH3
PJ0
PJ1
PK4
PK5
PK6
PK7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
PC0
PC1
PC2
PC3
3V3
GN
D
RST
92
101
74
83 5
6
J2 Pin
200
mm
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
Con
nect
or s
chem
a
1
Bar
tosz
Kac
zor
2
4
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIJ201
PIJ202
PIJ203
PIJ204
PIJ205
PIJ206
PIJ207
PIJ208
PIJ209
PIJ2010
COJ2
PIU1011
PIU1027
PIU1057
PIU1058
PIU1071
PIU1072
PIU1073
PIU1074
PIU1086
PIU1093
PIU1094
PIU10102
PIU10104
PIU10105
PIU10106
PIU10107
PIU10108
PIU10109
PIU10110
PIU10111
PIU10112
PIU10118
PIU10119
COU1B
PIU101
PIU102
PIU103
PIU104
PIU1012
PIU1013
PIU1014
PIU1015
PIU1029
PIU1030
PIU1031
PIU1032
PIU1035
PIU1036
PIU1037
PIU1038
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1051
PIU1052
PIU1053
PIU1054
PIU1055
PIU1056
PIU1059
PIU1060
PIU1061
PIU1062
PIU1091
PIU1096
PIU1097
PIU1098
PIU1099
PIU10100
PIU10116
PIU10117
PIU10120
PIU10121
PIU10123
PIU10124
PIU10125
PIU10126
PIU10127
PIU10128
COU1G
PI1041
PI1080
PIJ201
PI1059
PI1060
PI1061
PI1062
PI1042
PI1043
PI1078
PI1079
PIJ202
PIJ203
PIJ205
PIJ204
PI1063
PIU1035
NLPA2
PI1066
PIU1036
NLPA3
PI1067
PIU1037
NLPA4
PI1058
PIU1038
NLPA5
PI102
PIU1096
NLPB1
PI1045
PIU1091
NLPB2
PI1029
PIU10121
NLPB4
PI1030
PIU10120
NLPB5
PI103
PIJ209
PIU10100
NLPC0
PI1038
PIJ2010
PIU1099
NLPC
1
PI1039
PIJ207
PIU1098
NLPC2
PI1040
PIJ208
PIU1097
NLPC3
PI1019
PIU101
NLPD
0
PI1022
PIU102
NLPD1
PI1021
PIU103
NLPD
2
PI1020
PIU104
NLPD3
PI1026
PIU10125
NLPD
4
PI1025
PIU10126
NLPD5
PI1024
PIU10127
NLPD
6
PI1023
PIU10128
NLPD
7
PI1014
PIU1015
NLPE0
PI1015
PIU1014
NLPE1
PI1016
PIU1013
NLPE2
PI1017
PIU1012
NLPE3
PI1028
PIU10123
NLPE4
PI1027
PIU10124
NLPE5
PI1057
PIU1042
NLPF0
PI1068
PIU1043
NLPF1
PI1056
PIU1044
NLPF2
PI1069
PIU1045
NLPF3
PI1055
PIU1046
NLPF4
PI1054
PIU1051
NLPG2
PI1070
PIU1052
NLPG3
PI1071
PIU1053
NLPG4
PI1053
PIU1054
NLPG5
PI1052
PIU1055
NLPG6
PI1072
PIU1056
NLPG7
PI1010
PIU1029
NLPH0
PI109
PIU1030
NLPH1
PI1065
PIU1031
NLPH2
PI1064
PIU1032
NLPH3
PI1032
PIU10116
NLPJ0
PI1011
PIU10117
NLPJ1
PI1076
PIU1062
NLPK4
PI1049
PIU1061
NLPK5
PI1075
PIU1060
NLPK6
PI1050
PIU1059
NLPK7
PI1077
PIU1086
NLPL5
PI101
PIU1094
NLPL6
PI1044
PIU1093
NLPL7
PI1046
PIU1074
NLPM
4
PI1047
PIU1073
NLPM
5
PI1048
PIU1072
NLPM
6
PI1074
PIU1071
NLPM
7
PI1035
PIU10107
NLPN0
PI1034
PIU10108
NLPN1
PI106
PIU10109
NLPN2
PI107
PIU10110
NLPN3
PI1033
PIU10111
NLPN4
PI108
PIU10112
NLPN5
PI1031
PIU10118
NLPP0
PI1012
PIU10119
NLPP1
PI104
PIU10104
NLPP3
PI1036
PIU10105
NLPP4
PI105
PIU10106
NLPP5
PI1018
PIU1011
NLPQ
2
PI1013
PIU1027
NLPQ3
PI1037
PIU10102
NLPQ
4
PI1051
PIU1057
NLPQ5
PI1073
PIU1058
NLPQ
6
PIJ206
NLRST
Dodatek A Schematy modułoacutew urządzenia 53
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
N
etw
ork
SchD
ocD
raw
n B
y
B_1
PR
XP
3
B_1
CEN
SD
A4
B_1
NR
XN
5
B_2
PSD
P7
B_2
CEN
SC
L8
B_2
NS
DN
9
B_3
PTX
EN11
B_3
CEN
12
B_3
NT
XD
IS13
B_4
PTX
P15
B_4
CEN
~B
USP
16
B_4
NT
XN
17
NW
_LED
4B19
NW
_LED
4A20
NW
_LED
3B21
NW
_LED
3A22
NW
_LED
2B23
NW
_LED
2A24
NW
_LED
1B25
NW
_LED
1A26
A_1
PR
XP
29A
_1C
ENS
DA
30A
_1N
RX
N31
A_2
PSD
P33
A_2
CEN
SC
L34
A_2
NS
DN
35
A_3
PTX
EN37
A_3
CEN
38A
_3N
TX
DIS
39
A_4
PTX
P41
A_4
CEN
~B
USP
42A
_4N
TX
N43
C_T
X45
C_R
X46
C_T
XEN
47~C
_BU
SP48
GA
TE1
49G
ATE
250
Net
wor
k C
onne
ctor
A Any
bus_
CC
_B40
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T1 47
uHB_
1PB_
1CEN
B_1N
B_1P
B_1C
EN
B_1N
B_2P
B_2C
ENB_
2N
B_2P
B_2C
EN
B_2N
16V
100n
F
C1
16V
100n
F
C2
GN
DS
PE
2kV
1nF
C3
R1
75R
275
R5
1M2k
V1n
F
C4 PE
CSM
0645
D
TD+
1
TD-
2
TDC
3
RD
C4
RD
+5
RD
-6
RX
-7
RX
+8
RC
T9
TCT
10TX
-11
TX+
12T2 47
uH
A_1
P
A_1
CEN
A_1
N
A_2
P
A_2
CEN
A_2
N
16V
100n
F
C5
16V
100n
F
C6
GN
DS
PE
2kV
1nF
C7
R6
75R
775
A_1
PA
_1C
ENA
_1N
A_2
PA
_2C
ENA
_2N
DL1
R18
220
R17
220
R16
220
R15
220
R14
220
R13
220
R12
220
R11
220
DL2
DL3
DL4
GN
DS
3210 4
J4 Clic
k_M
ate
5x1
3210 4
J5 Clic
k_M
ate
5x1
Net
wor
k co
nnec
tor
1
3
4B
arto
sz k
aczo
r
PI03
PI04
PI05
PI07
PI08
PI09
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PI020
PI021
PI022
PI023
PI024
PI025
PI026
PI029
PI030
PI031
PI033
PI034
PI035
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
COA
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301 PIC302
COC3
PIC401 PIC402
COC4
PIC501 PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIDL101 PIDL102
PIDL103 PIDL104 CODL1
PIDL201 PIDL202
PIDL203 PIDL204 CODL2
PIDL301 PIDL302
PIDL303 PIDL304 CODL3
PIDL401 PIDL402
PIDL403 PIDL404 CODL4
PIJ400
PIJ401
PIJ402
PIJ403
PIJ404
COJ4 PIJ500
PIJ501
PIJ502
PIJ503
PIJ504
COJ5
PIR101 PIR102 COR
1 PIR201 PIR202 COR
2
PIR501 PIR502 COR
5
PIR601 PIR602 COR
6 PIR701 PIR702 COR
7
PIR1101 PIR1102 COR1
1
PIR1201 PIR1202 COR12
PIR1301 PIR1302 COR13
PIR1401 PIR1402 COR14
PIR1501 PIR1502 COR15
PIR1601 PIR1602 COR16
PIR1701 PIR1702 COR17 PIR1801 PIR1802
COR1
8
PIT101
PIT102
PIT103
PIT104
PIT105
PIT106
PIT107
PIT108
PIT109
PIT1010
PIT1011
PIT1012
COT1
PIT201
PIT202
PIT203
PIT204
PIT205
PIT206
PIT207
PIT208
PIT209
PIT2010
PIT2011
PIT2012
COT2
PI030
PIC501
PIT203
NLA01CEN
PI031
PIT202
NLA0
1N
PI029
PIT201
NLA0
1P
PI034
PIC601
PIT204
NLA02CEN
PI035
PIT206
NLA0
2N
PI033
PIT205
NLA0
2P
PI04
PIC101
PIT103
NLB01CEN
PI05
PIT102
NLB0
1N
PI03
PIT101
NLB0
1P
PI08
PIC201
PIT104
NLB02CEN
PI09
PIT106
NLB0
2N
PI07
PIT105
NLB0
2P
PIC102 PIC202
PIC502 PIC602
PIDL101 PIDL103
PIDL201 PIDL203
PIDL301 PIDL303
PIDL401 PIDL403
PI011
PI012
PI013
PI015
PI016
PI017
PI019
PIR1102
PI020
PIR1202
PI021
PIR1302
PI022
PIR1402
PI023
PIR1502
PI024
PIR1602 PI025
PIR1702 PI026
PIR1802
PI037
PI038
PI039
PI041
PI042
PI043
PI045
PI046
PI047
PI048
PI049
PI050
PIC301 PIR101
PIR201
PIC401
PIJ404 PIJ504
PIR502
PIC701 PIR601
PIR701
PIDL102
PIR1701
PIDL104
PIR1801
PIDL202
PIR1501
PIDL204
PIR1601
PIDL302
PIR1301
PIDL304
PIR1401
PIDL402
PIR1101
PIDL404
PIR1201
PIJ400
PIT1012
PIJ401
PIT1011
PIJ402
PIT108
PIJ403
PIT107
PIJ500
PIT2012
PIJ501
PIT2011
PIJ502
PIT208
PIJ503
PIT207 PIR102
PIT1010
PIR202
PIT109
PIR602
PIT2010
PIR702
PIT209
PIC302
PIC402
PIC702
PIR501
54 Dodatek A Schematy modułoacutew urządzenia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-13
Shee
t o
fFi
le
CU
sers
P
ower
Supp
lyS
chD
ocD
raw
n B
y
5V GN
D
GN
D
3V3
GN
DS
GN
DS
3V3 R
pu10
k 16V
10nF
C21
GN
DS
Rs
470
TAC
TD60
B1
GN
DS
16V
10uF
Cin
R20
510k
Rpg
499k
R21
162k
16V
22uF
Cou
t
16V
4uF
Cld
o
3V3
GN
DS
GN
DS
16V
12pF
Cx2
16V
12pF
Cx1
GN
DS
3V3
1
GN
D2
GN
D6
GN
D10
GN
D14
GN
D18
3V3
27
GN
D28
GN
D32
GN
D36
GN
D40
GN
D44
3V3
51
GN
D52
Pow
er p
ins
3V3
101
GN
D10
2
GN
D10
8
GN
D11
4
GN
D11
8
GN
D12
4
GN
D12
8
GN
D13
4G
ND
140
GN
D14
4G
ND
150
3V3
155
GN
D15
6
C Any
bus_
CC
_B40
3V3
GN
DS
GN
DG
ND
S
WA
KE_
N64
HIB
_N65
XO
SC0
66
XO
SC1
67
RST
_N70
OSC
088
OSC
189
U1C
TM4C
1292
NC
PDTI
3R
VD
D7
VD
DA
8
VR
EFA
+9
GN
DA
10
VD
D16
GN
D17
VD
D26
VD
D28
VD
D39
VD
D47
GN
D48
VD
D63
VB
AT
68
VD
D69
VD
D79
GN
D80
VD
DC
87
VD
D90
VD
D10
1
VD
D11
3
GN
D11
4
VD
DC
115
VD
D12
2
U1D
TM4C
1292
NC
PDTI
3R
RST
GN
DX
18M
Hz
GN
D
EN1
PG2
VIN
3
VIN
4G
ND
5G
ND
6FB
7V
OU
T8
TPS8
2085
GN
D9
U2
TPS8
2085
GN
D
R66
500k
2kV
1nF
C55 PE
GN
DR
5550
0k2k
V1n
F
C44 PE
GN
D
R77
500k
2kV
1nF
C66 PE
GN
D
16V
100n
F
CV
116
V10
0nF
CV
216
V10
0nF
CV
316
V10
0nF
CV
4
3V3
16V
100n
F
CV
516
V10
0nF
CV
616
V10
0nF
CV
716
V10
0nF
CV
816
V10
0nF
CV
916
V10
0nF
CV
1016
V10
0nF
CV
1116
V10
0nF
CV
1216
V10
0nF
CV
13
GN
D
16V
1uF
CV
ref1
16V
10nF
CV
ref2
GN
DG
ND Po
wer
supp
ly
1
4
4 B
arto
sz K
aczo
r
PI01
PI02
PI06
PI010
PI014
PI018
PI027
PI028
PI032
PI036
PI040
PI044
PI051
PI052
PI0101
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0155
PI0156
COC
PIB101
PIB102
PIB103 PI
B104 COB1
PIC2101 PIC2102
COC2
1
PIC4401 PIC4402
COC44
PIC5501 PIC5502
COC55
PIC6601 PIC6602
COC66
PICin01 PICin02
COCin
PICldo01 PICldo02
COCl
do
PICout01 PICout02
COCo
ut
PICV101 PICV102
COCV1
PICV201 PICV202
COCV
2 PICV301 PICV302
COCV
3 PICV401 PICV402
COCV
4 PICV501 PICV502
COCV5
PICV601 PICV602
COCV
6 PICV701 PICV702
COCV
7 PICV801 PICV802
COCV
8 PICV901 PICV902
COCV
9 PICV1001 PICV1002
COCV10
PICV1101 PICV1102
COCV11
PICV1201 PICV1202
COCV12
PICV1301 PICV1302
COCV13
PICVref101 PICVref102
COCV
ref1
PICVref201 PICVref202
COCVref2
PICx101 PICx102
COCx1
PICx201 PICx202
COCx2
PIR2001 PIR2002 COR20
PIR2
101
PIR2
102 COR
21
PIR5501 PIR5502 COR55
PIR6601 PIR6602 COR
66
PIR7701 PIR7702 CO
R77
PIRpg01 PIRpg02 CO
Rpg
PIRpu01 PIRpu02 CORpu
PIRs01
PIRs
02
CORs
PIU1064
PIU1065
PIU1066
PIU1067
PIU1070
PIU1088
PIU1089
COU1
C
PIU107
PIU108
PIU109
PIU1010
PIU1016
PIU1017
PIU1026
PIU1028
PIU1039
PIU1047
PIU1048
PIU1063
PIU1068
PIU1069
PIU1079
PIU1080
PIU1087
PIU1090
PIU10101
PIU10113
PIU10114
PIU10115
PIU10122
COU1
D
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
COU2
PIX101 PIX102 PIX10GND
PIX10GND2 COX
1
PI01
PI027
PI051
PI0101
PI0155
PICout01
PICV101 PICV201
PICV301 PICV401
PICV501 PICV601
PICV701 PICV801
PICV901 PICV1001
PICV1101 PICV1201
PICV1301
PICVref101 PICVref201
PIR2002 PIRpg02
PIRpu02
PIU107
PIU108
PIU109
PIU1016
PIU1026
PIU1028
PIU1039
PIU1047
PIU1063
PIU1068
PIU1069
PIU1079
PIU1090
PIU10101
PIU10113
PIU10122
PIU208
PICin01
PIU201
PIU203
PIU204
PI02
PI06
PI010
PI014
PI018
PI028
PI032
PI036
PI040
PI044
PI052
PI0102
PI0108
PI0114
PI0118
PI0124
PI0128
PI0134
PI0140
PI0144
PI0150
PI0156
PIB101
PIB102
PIC2102
PIC4401 PIC5501
PIC6601
PICin02
PICldo02
PICout02
PICV102 PICV202
PICV302 PICV402
PICV502 PICV602
PICV702 PICV802
PICV902 PICV1002
PICV1102 PICV1202
PICV1302
PICVref102 PICVref202
PICx102 PICx202
PIR2
101
PIR5502 PIR6602
PIR7702
PIU1010
PIU1017
PIU1048
PIU1064
PIU1080
PIU1088
PIU10114
PIU205
PIU206
PIU209
PIX10GND
PIX10GND2
PIB103 PI
B104 PIRs01
PICldo01
PIU1087
PIU10115
PICx101
PIU1067
PIX101
PICx201
PIU1066
PIX102
PIR2001 PIR2
102
PIU207
PIRpg01
PIU202
PIU1065
PIU1089
PIC4402 PIC5502
PIC6602
PIR5501 PIR6601
PIR7701
PIC2101 PIRpu01 PI
Rs02
PIU1070
NLRST
Dodatek A Schematy modułoacutew urządzenia 55
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Rev
isio
nSi
ze A4
Dat
e20
16-0
6-15
Shee
t o
fFi
le
CU
sers
IM
UO
ldS
chD
ocD
raw
n B
y
8642 16141210 18 20 22 24
17 19 21 239 11 13 157531J5 H
eade
r 12x
2
5V
GN
D
5V
16V
100n
F
C1
16V
100n
F
C2
GN
DRS
TCSD
OU
TD
IO4
DIO
3SC
LKD
IND
IO1
DIO
2
PA2
PA3
PA4
PA5
PB1
PB2
GN
DG
ND
5V5V
PA2
PA3
PA4
PA5
PB1
PB2
PB4
PB5
PC0
PC1
PC2
PC3
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PH0
PH1
PH2
PH3
PK4
PK5
PK6
PK7
PE0
PE1
PE2
PE3
PE4
PE5
PF0
PF1
PF2
PF3
PF4
PG2
PG3
PG4
PG5
PG6
PG7
PL5
PL6
PL7
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PQ2
PQ3
PQ4
PQ5
PQ6
PP0
PP1
PP3
PP4
PP5
PJ0
PJ1
GN
DG
ND
3V3
3V3
2161
1959
2363
2666
2767
1858
22
545
2929
3030
33
3838
3939
4040
3676
949
3575
1050
3232
1111
242
141
55
3636
44
1212
3131
2464
2565
99
1010
2323
2424
2525
2626
2020
2121
2222
1919
3878
1A TE-F
ine-
Stac
k-40
-S_e
th
3979
1454
3070
3171
1353
1252
3272
1757
2868
1656
2969
1555
1414
1515
1616
1717
2828
2727
4080
343
3373
1151
3737
1313
1818
88
3333
77
66
3434
3535
3474
848
747
646
444
11
3777
2060
2262
1B TE-F
ine-
Stac
k-40
-S_e
th
5V5V
Any
bus
1A c
onsu
mpt
ion
1 23 4
J2
5V
GN
D
PI102
PI103
PI104
PI105
PI109
PI1010
PI1011
PI1012
PI1019
PI1020
PI1021
PI1022
PI1023
PI1024
PI1025
PI1026
PI1029
PI1030
PI1031
PI1032
PI1036
PI1038
PI1039
PI1040
PI1041
PI1042
PI1045
PI1049
PI1050
PI1058
PI1059
PI1061
PI1063
PI1064
PI1065
PI1066
PI1067
PI1075
PI1076
PI1078
CO1A
PI101
PI106
PI107
PI108
PI1013
PI1014
PI1015
PI1016
PI1017
PI1018
PI1027
PI1028
PI1033
PI1034
PI1035
PI1037
PI1043
PI1044
PI1046
PI1047
PI1048
PI1051
PI1052
PI1053
PI1054
PI1055
PI1056
PI1057
PI1060
PI1062
PI1068
PI1069
PI1070
PI1071
PI1072
PI1073
PI1074
PI1077
PI1079
PI1080
CO1B
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIJ201
PIJ202
PIJ203
PIJ204
COJ2
PIJ501
PIJ502
PIJ503
PIJ504
PIJ505
PIJ506
PIJ507
PIJ508
PIJ509
PIJ5
010
PIJ5011
PIJ5012
PIJ5013
PIJ5014
PIJ5
015
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
COJ5
PI1041
PI1080
PI1059
PI1060
PI1061
PI1062
PIC101 PIC201
PIJ201
PIJ5
010
PIJ5011
PIJ5012
PI1066
PIJ506
NLCS
NLPA3
PI1067
PIJ505
NLDIN
NLPA4
PIJ507
NLDI
O1 PIJ509
NLDI
O2 PIJ501
NLDI
O3
PI1045
PIJ502
NLDI
O4
NLPB2
PI1058
PIJ504
NLDOUT
NLPA5
PI1042
PI1043
PI1078
PI1079
PIC102 PIC202
PIJ204
PIJ5013
PIJ5014
PIJ5
015
PIJ202
PIJ203
PIJ5
016
PIJ5
017
PIJ5
018
PIJ5019
PIJ5020
PIJ5021
PIJ5022
PIJ5023
PIJ5024
PI1063
PIJ503
NLPA2
NLSCLK
PI102
PIJ508
NLPB1
NLRS
T
PI1029
NLPB4
PI1030
NLPB5
PI103
NLPC0
PI1038
NLPC1
PI1039
NLPC2
PI1040
NLPC3
PI1019
NLPD0
PI1022
NLPD1
PI1021
NLPD2
PI1020
NLPD3
PI1026
NLPD4
PI1025
NLPD5
PI1024
NLPD6
PI1023
NLPD7
PI1014
NLPE0
PI1015
NLPE
1
PI1016
NLPE2
PI1017
NLPE3
PI1028
NLPE4
PI1027
NLPE
5
PI1057
NLPF
0
PI1068
NLPF
1
PI1056
NLPF2
PI1069
NLPF3
PI1055
NLPF
4
PI1054
NLPG2
PI1070
NLPG3
PI1071
NLPG4
PI1053
NLPG5
PI1052
NLPG6
PI1072
NLPG7
PI1010
NLPH0
PI109
NLPH1
PI1065
NLPH2
PI1064
NLPH3
PI1032
NLPJ0
PI1011
NLPJ1
PI1076
NLPK4
PI1049
NLPK5
PI1075
NLPK6
PI1050
NLPK7
PI1077
NLPL5
PI101
NLPL6
PI1044
NLPL7
PI1046
NLPM
4
PI1047
NLPM
5
PI1048
NLPM
6
PI1074
NLPM
7
PI1035
NLPN0
PI1034
NLPN1
PI106
NLPN2
PI107
NLPN3
PI1033
NLPN4
PI108
NLPN5
PI1031
NLPP0
PI1012
NLPP1
PI104
NLPP3
PI1036
NLPP4
PI105
NLPP5
PI1018
NLPQ2
PI1013
NLPQ3
PI1037
NLPQ4
PI1051
NLPQ5
PI1073
NLPQ6
56 Dodatek A Schematy modułoacutew urządzenia
Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

Dodatek B
Wykresy pobranych trajektorii
Dodatek B Wykresy pobranych trajektorii 57
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B1 Trajektoria ucząca z minimalnym zastosowaniem filtru
58 Dodatek B Wykresy pobranych trajektorii
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B2 Trajektoria ucząca z zastosowaniem filtru o średnim ustawieniu
Dodatek B Wykresy pobranych trajektorii 59
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii

czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(a) Siła zmieżona w osi x
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(b) przyspieszenie zmieżonew osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(c) Siła skorygowana w osi x
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(d) Siła zmieżona w osi y
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(e) przyspieszenie zmieżonew osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(f) Siła skorygowana w osi y
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(g) Siła zmieżona w osi z
czas (ns) 1010
0 1 2 3 4 5 6
Prz
yspi
esze
nie
(ms
2)
-20
-15
-10
-5
0
5
10
15
20
(h) przyspieszenie zmieżonew osi z
czas (ns) 1010
0 1 2 3 4 5 6-20
-15
-10
-5
0
5
10
15
20
(i) Siła skorygowana w osi z
Rysunek B3 Trajektoria weryfikująca z minimalnym zastosowaniem filtru
60 Dodatek B Wykresy pobranych trajektorii
![[Fotografia]. Podstawowe pojęcia / Krzysztof Pacholak, Tomasz Kaczor](https://static.fdocuments.pl/doc/165x107/55d2f7fbbb61eb681b8b46cb/fotografia-podstawowe-pojecia-krzysztof-pacholak-tomasz-kaczor.jpg)