Zdalne i autonomiczne statki Zdalne sterowane i autonomiczne … · 2018. 6. 25. · miliona euro,...
65
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki 1 AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England Zdalne i autonomiczne statki Zdalne sterowane i autonomiczne statki Kolejne kroki
Transcript of Zdalne i autonomiczne statki Zdalne sterowane i autonomiczne … · 2018. 6. 25. · miliona euro,...
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
1
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Zdalne i autonomiczne statki
Zdalne sterowane i autonomiczne statki Kolejne kroki
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
2
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
SPIS TREŚCI Str. Autorzy Wstęp 3 Esa Jokioinen Wprowadzenie 4 Inicjatywa AAWA 5 Wizja eksploatacji statków zdalnie sterowanych 6 Planowanie i inicjowanie rejsu 8 Odcumowanie i manewrowanie z portu 9 Tryby pracy na pełnym morzu 10 Podejście portowe i dokowanie 12 Możliwość stosowania różnych typów statków 12 Wnioski 13 Technologie dla morskiej świadomości sytuacyjnej i autonomicznej nawigacji
15 Jonne Poikonen
Autonomiczna nawigacja statku 18 Mika Hyvonen Znajomość obrazu sytuacji (SA) dla autonomicznych statków 23 Antti Kolu Komunikacja off-ship 30 Tero Jokela Jari Tissari Ari Paasio Konsekwencje prawne zdalnej i autonomicznej żeglugi 35 Henrik Ringbom Wprowadzenie 36 Felix Collin Prawo na morzu 36 Mika Viljanen Wymagania techniczne 40 Zasady odpowiedzialności 49
Podsumowanie 54 Bezpieczeństwo i ochrona w autonomicznej żegludze - wyzwania dla badań i rozwoju
56 Risto Jalonen
Risto Tuominen Wprowadzenie autonomicznych statków handlowych do operacji morskich
58 Mikael Wahlstrom
Czy statki „bezzałogowe” są bezpieczne? 59 Warunki wstępne bezpieczeństwa i ochrony 60 Główne obszary ryzyka - niektóre wybrane przykłady 62 Zarządzanie bezpieczeństwem i ochroną żeglugi w krótkim i długim okresie
68
Budowanie zrozumienia ryzyka na przyszłość 72 Zalecenia 72
Od innowacji do rynków - Ponowne definiowanie żeglugi 74 Jouni Saarni Ponowne definiowanie żeglugi - przejście do autonomicznej żeglugi
75 Sini Nordberg-Davies
Autonomiczna żegluga - kwestia relacji działalności biznesowej i sieci
77 Hannu Makkonen
Autonomiczna żegluga - odnowiony zbiór ról między najważniejszymi podmiotami
79
Sterowniki przejściowe do autonomicznej żeglugi 80 Przejściowa mapa drogowa 82 Wnioski 85
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
3
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Wprowadzenie Esa Jokioinen - Rolls-Royce - Head of Blue Ocean Team 1. Wprowadzenie "Autonomiczna żegluga to przyszłość przemysłu morskiego. Podobnie rewolucyjna jak inteligentny telefon, statek inteligentny zrewolucjonizuje całokształt działań i projektowania statków”
Mikael Makinen, President Rolls-Royce Marine Dziesięć lat temu sam pomysł, że można zarządzać swoim życiem przy pomocy małego, szklanego ekranu uważano za prawie niemożliwy do zrealizowania. Teraz niewielu z nas chciałoby bez niego obyć. Dwa lata temu rozmowa o inteligentnych statkach również była przez wielu uważana za futurystyczną fantazję. Obecnie perspektywa zdalnie sterowanego statku w celach komercyjnych, zrealizowana do końca dekady stała się rzeczywistością. Określone technologie, a w szczególności technologie czujników, potrzebne dla wykonania zdalnie sterowanych i autonomicznych statków już istnieją. Istotnym wyzwaniem tutaj jest znalezienie optymalnego sposobu połączenia ich w sposób wiarygodny i efektywny pod względem opłacalności morskiego transportu. Stale doskonalone są algorytmy decyzyjne, które pomogą takim statkom zdecydować, jakie działania należy podjąć w danej chwili, wykorzystując informacje z ciągle udoskonalanych czujników. Wymaga to jednak prawidłowej interpretacji zasad oraz przepisów morskich, których spełnienie tworzy poważne wyzwania interpretacyjne dla programisty. Rozwój systemów wspomagania podjętych decyzji będzie stopniowym i wielokrotnie powtarzanym procesem, wymagającym wielu działań badawczych i symulacyjnych. W celu uzyskania odpowiednich zezwoleń prawnych, a także właściwego wsparcia przemysłowego i akceptacji społecznej, zdalne i autonomiczne statki będą musiały być co najmniej tak samo bezpieczne jak statki pływające obecnie. Pozwalają one na znaczne zmniejszenie liczby błędów popełnianych przez ludzi, ale jednocześnie pojawią się nowe rodzaje zagrożeń i potrzeba ich rozwiązania. Wymagany będzie kompleksowy i dobrze zorganizowany sposób identyfikacji tych zagrożeń i właściwe postępowanie w stosunku do nich. Bezzałogowe statki otwierają ekscytujące możliwości zupełnie nowych sposobów konstrukcji statków i projektowania funkcji, które mają one realizować. Jeżeli na pokładzie nie ma ludzi, jesteśmy w stanie usunąć wiele ograniczeń w układzie danej jednostki. Jedną z najbardziej oczywistych rzeczy jest możliwość usunięcia przedziałów mieszkalnych, wraz z tym całą nadbudówkę pokładową. Pozwoli to zaoszczędzić znaczne koszty, zmniejszyć masę i powiększyć przestrzeń co spowoduje, że statek będzie zdolny do przewożenia większej ilości ładunku. Każdy statek zawiera wiele systemów zainstalowanych wyłącznie w celu służenia załodze. Ich usunięcie uprości konstrukcję całej jednostki, co powinno w znacznym stopniu poprawić niezawodność statku i jego wydajność, przy jednoczesnym obniżeniu kosztów budowy i eksploatacji. Przyszłe statki jednak nadal będą potrzebować ludzkiego nadzoru z lądu, aby utworzyć stabilne połączenie statku z lądem. Taka komunikacja musi być dwukierunkowa, dokładna, skalowalna i wspierana przez wiele systemów tworzących nadmiarowość i minimalizujących ewentualne ryzyko. W razie konieczności należy zapewnić wystarczającą wydajność łącza komunikacyjnego do monitorowania wszystkich czujników statku i oraz do zdalnego nim sterowania. Ciągła i gwarantowana łączność umożliwia monitorowanie działających urządzeń w czasie rzeczywistym oraz wykrywania, określania i diagnozowania wszystkich problemów związanych z ważnymi urządzeniami pomagającymi odbiorcom maksymalnie wykorzystać ich zasoby przez optymalizację zarówno operacji, jak i harmonogramów wymaganych konserwacji. Taki bogaty strumień danych i bardziej znormalizowane statki będą miały olbrzymie pozytywne konsekwencje dla branży żeglugowej. System ten umożliwi właścicielom statków sprawne zarządzanie swoją flotą, aby zoptymalizować realizowane operacje i maksymalizować osiągany zysk. Patrząc równocześnie na dane z
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
4
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
poszczególnych statków, będą oni mogli opracować optymalne zestawienie trasy, ładunku, harmonogramu konserwacji i cen paliwa dla floty jako całości uzyskując maksymalną wartość zysku w zbiorze jednak bardzo kosztownych aktywów. Na tym statku właściciele nie będą sami. Intensywna cyfryzacja danych stworzy nowe usługi żeglugowe, takie jak łatwiejsze i efektywne tworzenie karteli oraz związków, leasing aktywów, internetowe rynki usług cargo itp. Niektóre z tych usług będą wspierać istniejących uczestników rynku, a niektóre z nich będą tworzyć nowe możliwości - pozwalając nowym graczom na wejście na rynek i przejęcie udziałów dużych firm w taki sam sposób, jak tego dokonały Uber, Spotify i Airbnb w innych sektorach przemysłu. Rolls-Royce wraz z innymi partnerami projektu AAWA, DNV GL, Inmarsat, Deltamarin, NAPA, Brighthouse Intelligence, Finferries i ESL Shipping - i przy wsparciu firmy Tekes Rolls-Royce – również dołączyły do tej rewolucji. 2. Inicjatywa AAWA Inicjatywa Advanced Autonomous Waterborne Applications (AAWA) to projekt o wartości 6,6 miliona euro, finansowany przez Tekes (Fiński Fundusz Agencji ds. Technologii i Innowacji), którego celem jest opracowanie koniecznych specyfikacji i wstępnych projektów dla następnej generacji zaawansowanych rozwiązań okrętowych. Łączy ona uniwersytety, projektantów statków, producentów sprzętu i towarzystwa klasyfikacyjne w celu prowadzenia badań umożliwiających rozwiązywanie problemów pośród czynników ekonomicznych, społecznych, prawnych, regulacyjnych i technologicznych, które należy rozwiązać, aby autonomiczne statki stały się rzeczywistością. Projekt będzie kontynuowany do końca 2017 r. i utoruje drogę dla wielu rozwiązań - zaprojektowanych w celu umożliwienia zatwierdzenia badań projektu. Projekt połączy wiedzę fachową kilku z najlepszych akademickich naukowców z Tampere University of Technology; VTT Technical Research Centre of Finland Ltd; Abo Akademi University; Aalto University; University of Turku oraz wielu czołowych członków grupy morskiej, w tym Rolls-Royce, DNV GL, Inmarsat, Deltamarin, NAPA, Brighthouse Intelligence, Finferries i ESL Shipping. Szeroko zakrojone przedsięwzięcie dotyczy badań prowadzonych do tej pory przed zbadaniem określonych przypadków biznesowych w odniesieniu do zastosowań autonomicznych, bezpieczeństwa i ochrony związanych z projektowaniem i obsługą zdalnie sterowanych statków, konsekwencjami wynikającymi z przepisów i regulacji prawnych oraz istnieniem i gotowością sieci dostawców, która może dostarczyć komercyjnie wykorzystywane produkty w perspektywie krótko- i średnioterminowej. Technologiczny strumień działań, realizowany przez firmę Rolls-Royce, obejmuje konsekwencje zdalnej kontroli i autonomię statków w odniesieniu do napędu, urządzeń pokładowych oraz automatyzacji i kontroli wykorzystując tam, gdzie jest to możliwe, ustanowioną technologię do szybkiej komercjalizacji. Aby zdalnie sterowane i autonomiczne statki stały się rzeczywistością, trzeba odpowiedzieć na wiele zasadniczych pytań:
• Jaka technika jest konieczna i jak można najlepiej ją połączyć, aby statki mogły działać autonomicznie i wiele mil od brzegu;
• W jaki sposób autonomiczny statek może być co najmniej tak samo bezpieczny, jak obecnie istniejące statki, jakie może napotkać nowe zagrożenia i w jaki sposób się przed nimi uchronić;
• Jaka będzie motywacja dla armatorów i operatorów do inwestowania w statki autonomiczne oraz
• Czy autonomiczne statki są legalne i kto poniesie odpowiedzialność w razie wypadku? W 2015 r. w pierwszej fazie projektu zbadano obecny stan przemysłu morskiego i czego można się
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
5
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
nauczyć od innych branż - od dronów lotniczych i samochodów bez kierowców do smartfonów. W omawianym projekcie zbadano obecny stan zrozumienia problemów technologicznych, bezpieczeństwa, prawa i ekonomii związanych z obsługą zdalną i autonomiczną. Wyniki tych badań można znaleźć w tym dokumencie. Kolejne dwie fazy działań AAWA opierają się na wynikach pochodzących z pierwszej fazy i mają na celu opracowanie wymaganych specyfikacji technicznych, zasad prawnych i bezpieczeństwa dla przeprowadzenia dowodu uzasadniającego zalety koncepcji do końca 2017 roku. 3. Wizja zdalnego sterowania statkiem
Pojęcie autonomii dynamicznej W literaturze istnieje wiele różnych definicji autonomii i inteligencji maszyn. Poziomy autonomii (LOA) są dość często używane w celu opisania, do jakiego stopnia maszyna może działać samodzielnie. Prawdopodobnie najbardziej znane opisy dla LOA zostały opracowane przez Thomasa Sheridana. Skala Sheridana obejmuje ciągły zakres definicji od maszyny całkowicie kontrolowanej przez człowieka (czyli zdalnie sterowanej) poprzez maszynę, która jest w pełni autonomiczna i nie wymaga żadnego działania ze strony człowieka przed podjęciem przez nią działania. Tabela 1 – Poziomy autonomii Sheridana
Poziom Opis 10 Komputer wykonuje wszystko autonomicznie, ignoruje człowieka 9 Komputer informuje człowieka tylko w wypadku, kiedy sam tak zadecyduje 8 Komputer informuje człowieka tylko w wypadku, kiedy zostanie zapytany 7 Komputer wykonuje działania automatycznie w razie potrzeby informując człowieka
6 Komputer w ciągu ograniczonego czasu pozwala człowiekowi na zablokowanie automatycznie wykonywanych działań 5 Komputer wykonuje sugerowane działanie, jeżeli człowiek je zatwierdzi 4 Komputer sugeruje pojedynczą alternatywę 3 Komputer ogranicza alternatywy do kilku 2 Komputer oferuje kompletny zestaw alternatywnych rozwiązań
1 Komputer nie oferuje żadnej pomocy, człowiek jest odpowiedzialny za wszystkie decyzje i działania W badaniach opracowano różne warianty tego typu skali. Powszechnie przyjętym wnioskiem jest przekonanie, że takie skale mogą nie mieć zastosowania do całej operacji, ale są najbardziej użyteczne, gdy wykorzysta się je do różnych podrzędnych zadań dla maszyny autonomicznej. Wniosek ten ma również duże znaczenie dla autonomicznych statków, ponieważ zachowanie statku (to znaczy LOA) i wymagana ilość ludzkiej interakcji będzie zależeć od stanu statku i wykonywanych zadań pomocniczych. Ten rodzaj autonomii „regulowanej" lub „dynamicznej" jest pojęciem, które często jest omawiane w kontekście robotów mobilnych, w którym maszyna może pracować przez pewien okres czasu samodzielnie w zależności od ograniczeń wynikających z tolerancji przy podejmowaniu decyzji. Robot może samodzielnie wykonywać proste zadania, ale kiedy te zadania stają się coraz bardziej złożone, konieczna jest zwiększona interakcja z ludzkim operatorem. Statki zdalnie sterowane będą wykonywać określone działania zgodnie z tego typu podejściem do autonomii dynamicznej, ale w zależności od stanu statku i misji przez niego wykonywanej. W niektórych przypadkach, takich jak żegluga na otwartym morzu, statek może być prawie w pełni autonomiczny, podczas gdy w niektórych etapach rejsu wymagać będzie ścisłego nadzoru i podejmowania decyzji, a nawet pełnego działania telekomunikacyjnego ze strony operatora ludzkiego.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
6
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Aby zrozumieć, jak mogłyby funkcjonować autonomiczne statki, poniżej opisano przykład drobnicowca działającego między dwoma portami. Przykład ten ilustruje przykłady różnych poziomów autonomii podczas różnych faz rejsu. Dla uproszczenia przedstawiony jest pojedynczy statek obsługiwany przez jednego człowieka. 4. Planowanie i inicjowanie rejsu Istnieją pewne aspekty, związane z operacjami zdalnego sterowania, które operator powinien uwzględnić podczas planowania rejsu lub misji dla danego statku. Statki autonomiczne będą wykorzystywać różne sieci komunikacji satelitarnej i lądowej zależnie od ich dostępności, jakości oraz ceny. W większości autonomicznych trybów działania, systemy szerokopasmowej łączności satelitarnej o wysokiej przepustowości umożliwiają prowadzenie autonomicznego statku niezależnie od jego lokalizacji. Jednak niektóre tryby zdalnego sterowania lub zdalnego nadzoru mogą wymagać takiego opóźnienia i szerokości pasma, które w niekorzystnych warunkach pogodowych mogą przekraczać możliwości systemów satelitarnych. Operator powinien upewnić się, że dla zamierzonej misji jest dostępna łączność o wystarczająco dobrych parametrach. Ale nawet jeśli transfer danych autonomicznych statków ma najwyższy priorytet w tych sieciach, operator będzie musiał przeanalizować ruch i warunki pogodowe w celu podjęcia właściwej decyzji, co jest główną strategią działania na każdym etapie prowadzonej operacji. Z punktu zasad planowania rejsów oznacza to określenie, które główne działania należy obsługiwać w trybie zdalnego sterowania a które będą wykonywane autonomicznie. Gdy taka decyzja zostanie podjęta, operator będzie musiał dalej definiować strategie nawigacyjne wraz ze strategiami rezerwy awaryjnej dla każdego działania. Sekwencja strategii rezerwowych będzie wykonywana tylko wtedy, gdy statek doświadczy nieoczekiwanego ograniczenia łączności jednocześnie z wyzwaniami operacyjnymi, które zwykle wymagałyby interwencji operatora. Strategia rezerwy awaryjnej może obejmować: poproszenie operatora o podjęcie ręcznego sterowania (jeśli nie powiodło się), spowolnienie i przejście do kolejnego punktu trasy (jeśli zawiodło), zatrzymanie statku i pozostanie w trybie DP (jeśli nieudane), nawigowanie do poprzedniego punktu drogi (jeśli nie powiodło się), nawigowanie z powrotem do zaprogramowanej bezpiecznej lokalizacji. Polecenia i kolejność ich wykonywania nie są oczywiście takie same we wszystkich częściach rejsu. Na przykład próbując utrzymać swoją pozycję w środku zatłoczonej i wąskiej drogi wodnej w trudnych warunkach pogodowych, strategia taka może nie być możliwa. Plan rejsu oraz strategie rezerwy awaryjnej można zawsze modyfikować podczas rejsu przy użyciu satelitarnego łącza komunikacyjnego. Statek powinien również posiadać automatyczny system sprawdzania gotowości morskiej przed rozpoczęciem rejsu. Większość systemów może być sprawdzana zdalnie przez operatora, podczas gdy w niektórych obszarach (takich jak zabezpieczenie ładunku) załoga na lądzie może być również wykorzystana do sprawdzenia, czy rejs może zostać rozpoczęty. 5. Odcumowanie i manewrowanie w porcie Systemy cumowania dla autonomicznego statku mogą być w pełni lub półautomatyczne. W przypadku w pełni zautomatyzowanego systemu cumowniczego, całkowite operacje cumowania i odcumowania mogą być zdalnie sterowane lub będą automatycznie wykonywane przez autonomiczny statek. Półautomatyczne cumowanie oznacza, że połączenie do nabrzeża może zostać wykonane automatycznie, ale załoga będzie potrzebna, aby zabezpieczyć podejście do nabrzeża (tj. przy użyciu konwencjonalnych systemów cumowania opartych na linach). Obydwie te operacje potencjalnie będą wymagać pewnych modyfikacji w infrastrukturze nabrzeży co oznacza, że ekonomiczne uzasadnienie realizacji takiego systemu cumowania będzie zależeć od liczby statków, które będą w stanie korzystać z tego samego systemu podejścia do nabrzeża. Rozwiązania tego typu istnieją już na rynku i AAWA bada ich prawdopodobieństwo wykorzystania dla statków autonomicznych wraz z opracowaniem nowych potencjalnych układów automatycznego cumowania.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
7
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Rysunek 1 - Półautomatyczny system cumowania
Kiedy statek jest manewruje w zatłoczonym obszarze portowym, operator na lądzie może mieć możliwość bezpośredniego zdalnego sterowania lub kontroli nadzoru, która będzie wspierana przez systemy określania aktualnej sytuacji znajdujące się na pokładzie. W tego typu operacjach konieczne jest łącze komunikacyjne o dużej szerokości pasma i niskim czasie opóźnienia. W niektórych obszarach może to być zapewnione przez komunikacyjne sieci lądowe, a systemy łączności satelitarnej mogą pozostać jako rezerwa.
Rysunek 2 – Zdalna obsługa nadzorcza
Zdalne sterowanie może oznaczać bezpośrednie tryby pracy typu joystick, ponieważ dostępne są już istniejące dynamiczne rozwiązania pozycjonowania, takie jak prędkość zatrzymania, kurs statku lub względna pozycja do obiektu. Jednak w przypadku większości typów statków bardziej praktycznym sposobem jest sterowanie statkiem poprzez wysyłanie punktu docelowego, a komputer sterowania dynamicznym pozycjonowaniem i autonomiczny system sterowania zajmują się rzeczywistymi układami sterowania napędem. W niektórych obszarach jest potencjalnie możliwe, aby przejść bezpośrednio do trybu autonomicznego zamiast uruchamiania sterowania zdalnego lub nadzoru.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
8
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
6. Tryby pracy na otwartym morzu W normalnym trybie autonomicznym statek wykonuje planowaną misję (np. nawigację do następnego punktu trasy) zgodnie z określonym planem. W tym trybie minimalizowany jest transfer danych między statkiem a operatorem i ogranicza się on wyłącznie do przekazywania odpowiednich informacji dotyczących stanu danej jednostki, takich jak lokalizacja statku, jego kurs, prędkość czy ETA (przewidywany czas przybycia) do następnego punktu nawigacyjnego (lub najbliższego obszaru nadzoru) a także kluczowej informacji przekazywanych z systemów określających aktualną sytuację oraz krytycznych systemów okrętowych. Chociaż wymóg interakcji między statkiem a operatorem jest zwykle minimalny w normalnym stanie to jednak jest możliwe, że operator będzie nadzorował więcej niż jeden statek w tym samym czasie. Oznacza to, że poziom autonomii statku powinien być odpowiednio wysoki, aby zapewnić wykonanie misji zgodnie z planem realizowanym przez operatora. Dodatkowe informacje będą dostarczane automatycznie w przypadku, kiedy systemy znajomości obrazu sytuacji i system autonomicznej nawigacji autonomicznego systemu podejmowania decyzji będą ograniczone, a wymagane będą powiadomienie użytkownika, potwierdzenie lub odpowiednia interwencja. Oznacza to, że poziom autonomii będzie stale dynamicznie dostosowywany, jeśli wykonanie misji nie postępuje zgodnie z pierwotnym planem, a system autonomiczny nawigacji stwierdzi, że konieczne są określone korekty. W zależności od scenariusza operacyjnego będą wymagane różne poziomy interakcji operatora. Na przykład: jeśli statek zboczy z planowanego kursu pomiędzy dwoma punktami trasy, ale pozostanie w określonych granicach, system autonomicznej nawigacji informuje operatora o planowanym odchyleniu i daje operatorowi możliwość interwencji w ograniczonym czasie. Jednym z przykładów takiego odejścia może być podjęcie automatycznego działania, aby nie przeszkadzać innym statkom, nieznacznie zmieniając kurs lub prędkość. Operator może wybrać, czy wykorzystać radiotelefon VHF, aby skomunikować się z innym statkiem i potwierdzić, że działania podjęte przez statek są bezpieczne dla obu stron, a jeśli konieczne będą modyfikacje, operator może przejąć statek stosując kontrolę ręczną. Bardziej skomplikowanym przypadkiem wymagającym podejmowania określonej decyzji przez użytkownika jest sytuacja, kiedy statek wymaga zmiany kursu w taki sposób, aby kolejny punkt trasy został ponownie zaplanowany (np. zboczenie lub odejście od planowanej ścieżki nie wystarczy, aby rozwiązać dany problem nawigacyjny). Aby zapewnić, że takie zmiany planu zostaną wykonane w sposób bezpieczny, operator zostanie poproszony o potwierdzenie. System autonomicznej nawigacji oferuje jedną lub więcej alternatyw, w jaki sposób można zmodyfikować punkt drogi, ale ostatecznie operator podejmie decyzję, jak dana jednostka ma kontynuować rejs. Można również oczekiwać, że wystąpią złożone scenariusze, w których planowanie ścieżki i algorytmy systemu autonomicznej nawigacji nie będą w stanie jednoznacznie rozwiązać powstałej sytuacji. Przykładem może być wykrycie bardzo dużej liczby jednostek lub innych obiektów, a algorytmy planowania ścieżki nie będą w stanie ich zidentyfikować, a tym samym system nie będzie mógł ustalić, w jaki sposób powinna być prowadzona dalsza nawigacja. W tego typu scenariuszu statek natychmiast wysyła do operatora komunikat „pan-pan", sygnalizując pilną potrzebę pomocy. Statek posiada wcześniej zdefiniowany zestaw strategii rezerw awaryjnych, które zostaną uruchomione w celu wykonania wcześniej zaplanowanych poleceń, jeśli odpowiedź użytkownika nie została odebrana, i w sytuacji „pan-pan" - w zależności od nagłości sytuacji - automatyczne wykonanie strategii rezerw awaryjnych może być również natychmiast uruchomione.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
9
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Rysunek 3 – Różne scenariusze wymagają różnych poziomów zaangażowania operatora Działanie autonomicznej jednostki będzie łączyć dynamicznie różne poziomy autonomii w zależności od stanu statku i warunków zewnętrznych. Oczywiście, gdy algorytmy sterowania będą rozwijać się i dojrzewać w miarę upływu czasu, statki będą same zdolne do obsługi coraz bardziej złożonych sytuacji. Kiedy flota statków autonomicznych powiększy się, możliwe będzie powstanie takiej sytuacji, że autonomiczne statki będą mogły uczestniczyć w tych samych planach rejsów i będą komunikować się ze sobą automatycznie, co zmniejszy obciążenie operatora. Jednak zawsze statki obsadzone załogą będą pływać równolegle z autonomicznymi statkami co oznacza, że operator-człowiek będzie konieczny przez jakiś czas, aby interpretować otrzymane informacje, dopóki nie zostaną opracowane jasne standardy dzielenia takich informacji między statkami załogowymi i bezzałogowymi. 7. Podejście do portu i nabrzeża Podczas zbliżania się do obszaru portu operator może ponownie wybrać sterowanie typu zdalnego lub podwyższenie poziomu nadzoru statku. Może to być konieczne z punktu widzenia VTS, ale także dlatego, że może być wymagane pilotowanie. Pilotowanie może w przyszłości być zorganizowane na wiele różnych sposobów dla statków autonomicznych. Jedną z możliwości jest to, że pilot ma zdolność przejęcia kontroli nad autonomicznym statkiem lub alternatywnie operator autonomicznego statku może posiadać licencję pilota dla zamierzonych obszarów działania. Wdrożenie autonomicznych statków najprawdopodobniej zacznie się na wodach krajowych lub regionalnych i częstych kursów, co oznacza, że procedury pilotażowe i funkcjonalność współdziałania z VTS (ang. - Vessel Traffic Service - Służba kontroli ruchu) mogą być uzgodnione indywidualnie dla pierwszych statków. Podczas eksploatacji danej jednostki w pobliżu brzegu można ponownie polegać na systemach lądowych przeznaczonych dla komunikacji morskiej. Dodatkowo system nawigacji może korzystać z zewnętrznych systemów odniesienia na lądzie dla pozycjonowania, które będą użyteczne zwłaszcza w obszarach portowych. Ponadto można wykorzystywać lądowe systemy kamer i radarów, aby nawigować statkiem bezpiecznie wzdłuż nabrzeża. 8. Wykorzystanie różnych typów statków Przykład opisany we wcześniejszym rozdziale daje pewien obraz sytuacji, w jaki sposób autonomia dynamiczna mogłaby działać na rzecz sterowania statkami. Oczywiście typ i stopień autonomii będzie wysoce uzależniony od typu statku, jego wielkości, obszaru działania i warunków morskich. Na przykład autonomiczny holownik będzie przestrzegać tych samych zasad, ale ponieważ jego praca jest znacznie bardziej skupiona wokół misji holowniczej, zasady kontroli i autonomii powinny zostać zdefiniowane z innego punktu widzenia.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
10
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Ogólnie rzecz biorąc, im większa różnorodność i złożoność misji, tym bardziej jednostka będzie musiała polegać na pomocy operatora i zdalnym sterowaniu co najmniej w pierwszych fazach wdrożenia. Innym przykładem może być prom typu śródlądowego, wykonujący każdego dnia dziesiątki identycznych przejść. W tym przypadku sama misja charakteryzować się będzie dużo mniejszymi odchyleniami, a poziom autonomii w wykonywaniu zadania może być znacznie wyższy. Jednocześnie ważne jest aby pamiętać, że nawet jeżeli podstawowa misja nie będzie zbyt zróżnicowana, takie warunki jak pogoda i natężenie ruchu mogą się znacznie zmieniać. W takich przypadkach nadzór nad bezpieczeństwem operacji będzie prowadzić załoga pokładowa, nawet jeśli statek wykonuje swoją podstawową misję niemal autonomicznie. Oprócz różnic w rodzaju pracy i warunkach zewnętrznych, istnieją również znaczne różnice w sposobie reagowania statków na polecenia sterujące daną jednostką. Duży kontenerowiec i mały drobnicowiec będą musiały mieć określone swoje własne, specyficzne dla danego statku modele algorytmów sterowania, nawet jeżeli podstawy ich autonomicznego reagowania na różne warunki nawigacyjne byłyby zgodne z takimi samymi zasadami. Technicznie oznacza to również, że system znajomości obrazu sytuacji będzie różny, ponieważ opóźnienie (czas) reakcji dużego statku są znacznie większe, a jest wymagany wyższy poziom przewidywalności działań. 9. Wnioski W pierwszej fazie projektu AAWA zbadano obecny stan przemysłu morskiego oraz pobrano informacje, czego można się nauczyć od innych branż. W projekcie zbadano obecny stan świadomości dotyczącej wielu aspektów technologicznych, bezpieczeństwa, prawa i ekonomicznych dla pracy zdalnej i autonomicznej. Wstępne wnioski są następujące:
1. Nie będzie jednego rozwiązania dla statku zdalnego lub autonomicznego, ale raczej hybryda z dwóch rozwiązań, która będzie zależeć od typu i funkcji statku.
2. Technologie potrzebne do wykonania zdalnych i autonomicznych statków rzeczywiście już istnieją. Podstawowym wyzwaniem jest tutaj znalezienie optymalnego sposobu połączenia tych technologii w sposób wiarygodny i efektywny pod względem ponoszonych kosztów. Rozwój systemów wspomagania decyzji dla autonomicznych statków będzie stopniowym i iteracyjnym procesem i podlegać on będzie szeroko zakrojonym badaniom i symulacji.
3. Działanie zdalnie sterowanych i autonomicznych statków będzie co najmniej tak samo bezpieczne, jak istniejących statków. Istnieje realny potencjał, aby zmniejszyć błędy związane z działaniami ludzi, ale jednocześnie będą powstawać nowe typy zagrożeń, które należy zidentyfikować i którym należy sprostać.
4. Obowiązujące ustawodawstwo może zostać zmienione, jeśli zaistnieje taka wola polityczna. Aby zdalna i autonomiczna żegluga stała się realną rzeczywistością, konieczny będzie wysiłek na wszystkich szczeblach decyzyjnych, związanych z przepisami prawnymi. Trzeba zbadać kwestię legalności budowy i eksploatacji statku demonstracyjnego na szczeblu krajowym, przy jednoczesnym uwzględnieniu odpowiednich zmian w przepisach w IMO. Pytania dotyczące odpowiedzialności za autonomiczne statki podlegają zmianom przepisów narodowym, ale ogólnie rzecz biorąc wydaje się, że w tej dziedzinie potrzeba mniej zmian prawnych. Jednak powinno być zbadane, w jakim stopniu inne zasady odpowiedzialności, takie jak odpowiedzialność za produkty, wpłyną na tradycyjne zasady dotyczące odpowiedzialności i ubezpieczenia morskiego.
5. Zdalne i autonomiczne statki mają możliwości redefinicji zasad przemysłu morskiego i roli graczy w nim uczestniczących, z istotnymi konsekwencjami dla firm żeglugowych, budowniczych statków, twórców systemów morskich oraz firm technologicznych z innych sektorów (zwłaszcza branży samochodowej).
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
11
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Następne kroki to:
• rozwój i badania konkretnych rozwiązań technologicznych dla działania autonomicznego przy użyciu zarówno symulatorów, jak i prób na morzu w różnych warunkach środowiskowych – optymalny sposób połączenia różnych technologii czujników w zakresie różnych warunków pracy i stanów klimatycznych będzie przedmiotem serii prób w tym roku na pokładzie statku FinFerries, Stella, działającego między Korpo i Houtskar;
• badania naukowe w celu zapobiegania zmienionym i nowym zagrożeniom (jest wiele znanych i nieznanych zagrożeń) przedstawione przez nową i rozwijającą się technologię, opierając się na doświadczeniu przemysłu morskiego w zakresie systematycznej i kompleksowej oceny możliwego ryzyka w celu opracowania nowego podejścia do tego problemu;
• zbadanie prawnego wyzwania dotyczącego budowy i eksploatacji statku demonstracyjnego na szczeblu krajowym, przy jednoczesnym uwzględnieniu odpowiednich zmian w przepisach IMO;
• zbadanie poglądów stron zainteresowanych zdalną i autonomiczną żeglugą, pozwalające na ustalenie modeli kosztów i przychodów autonomicznej pracy dla różnych typów statków.
Rezultat II fazy będzie specyfikacją techniczną, prawną i bezpieczeństwa dla pełnego dowodu założeń strony przedstawiającej koncepcję przed końcem roku 2017 i zdalnie sterowany statek w celach komercyjnych do końca dekady. Rewolucja się rozpoczęła.
Technologia Jonne Poikonen, Senior Research Fellow, D.Sc. (Tech.), University of Turku Mika Hyvonen, Senior Research Fellow, D.Sc. (Tech.), Tampere University of Technology Antti Kolu, Doctoral Student, M.Sc. (Tech.), Tampere University of Technology Tero Jokela, Senior Research Fellow, D.Sc. (Tech.), University of Turku Jari Tissari, Project Researcher, M.Sc. (Tech.), University of Turku Ari Paasio, Professor, D.Sc. (Tech.), University of Turku Technologie dla morskiej znajomości sytuacji i nawigacji autonomicznej Technologie umożliwiające wprowadzenie zdalnych i autonomicznych statków już istnieją. Głównym zadaniem jest znalezienie optymalnego sposobu w celu połączenia ich niezawodnie i efektywnie pod względem optymalizacji kosztów. W ciągu ostatnich 10 lat obserwuje się rozwój autonomicznych pojazdów, zarówno na lądzie, jak i w powietrzu oraz na morzu. Nastąpiło to dzięki postępowi w technologiach, które umożliwiają realną ocenę otaczającego środowiska, planowanie trasy i kontrolę nad pojazdem w czasie rzeczywistym. Dzięki kombinacji szeregu zaawansowanych technologii czujnikowych, które stały się dostępne już poza zakresem wcześniejszego użycia ich w dziedzinach wojskowej i naukowej –
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
12
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
oraz szybko zwiększająca się wydajność przetwarzania danych - osiągnęliśmy poziom technologiczny, na którym możliwa jest całkowita autonomia tych pojazdów. Największy postęp osiągnięto w dziedzinie samochodów autonomicznych. Jest to naturalne ze względu na duży potencjał masowego rynku i globalną potrzebę zwiększenia bezpieczeństwa ruchu. Dla zastosowań wojskowych, znaczące badania naukowe i rozwój dokonał się w dziedzinach autonomicznych pojazdów lądowych, lotnictwa, a także statków morskich, takich jak małe patrole i łodzie bojowe [Elkins, 2010]. Ostatnie starania, aby stworzyć odpowiednie rozwiązania także dla cywilnych autonomicznych statków morskich znacząco się rozwinęły, np. w formie wielu nowych programów badawczych we współpracy z firmami akademickimi i morskimi, w tym również AAWA. Jedną z kluczowych technologii dla nawigacji niezawodnego autonomicznego pojazdu jest odpowiednie połączenie czujników. Przy tworzeniu obrazu znajomości sytuacyjnej [SA] dla autonomicznego pojazdu, żadna technologia pojedynczego czujnika nie może zapewnić wystarczającej wydajności we wszystkich możliwych warunkach. Zatem w celu zagwarantowania, że informacje o warunkach w pobliżu pojazdu będą wystarczająco dokładne przez cały okres eksploatacji, dane wejściowe wielu czujników należy właściwie połączyć i przeanalizować. Przetwarzanie danych pochodzących z tych czujników powinno być w sposób ciągły zintegrowane z następującym po nim planowaniem ścieżki i reaktywnymi systemami unikania kolizji, które utrzymują stale aktualizowaną szczegółową mapę środowiska pojazdu, umożliwiając pojazdowi zaplanowanie trasy i uniknięcie ewentualnej kolizji z obiektami lub innymi pojazdami. Mapę zebraną z danych czujników można również uzupełnić danymi z baz danych map statycznych, takich jak Google Maps dla samochodów lub elektronicznych map morskich [ECDIS] dla statków, które prezentują obiekty statyczne obszaru otaczającego jednostkę. Badania nad samochodami autonomicznymi oferują najbardziej rozległe źródło publicznie dostępnych informacji o technologiach opracowanych dla autonomicznych pojazdów. Górna część rysunku 1 ilustruje typowy strumień odczytów danych z czujników i przetwarzania tych danych, stosowany w samochodach autonomicznych. Obecnie stosuje się wiele czujników do pobierania danych z otoczenia pojazdu. Preferencje dla różnych typów czujników różnią się, np. Google stosuje LIDAR jako główne źródło czujników, które jest wspierane przez inne urządzenia, natomiast podejście firmy Tesla lub Mercedes Benz opiera się na połączeniu kamer i radarów samochodowych krótkiego zasięgu. Dobór optymalnej platformy czujników jest kwestią wydajności, niezawodności i opłacalności morskiego transportu. Używane dane z czujników SA są wykorzystywane, aby stworzyć mapę lokalną otoczenia samochodu, która jest porównywana z bardzo szczegółowymi mapami, a także z modelami 3D obszaru, w którym pojazd się porusza. Pozwala to na określenie obszaru pozycji i umieszczenie pojazdu ze znacznie większą dokładnością niż jest to możliwe w przypadku lokalizacji na podstawie GPS. W celu zapobiegania kolizjom jest również wykorzystywana lokalna mapa przeszkód otaczających samochód. [Franke, 2013], [Guizzo, 2011] W dolnej części rysunku 1 przedstawiono podejście do autonomii statków opracowywane obecnie w AAWA. Wiele istniejących rozwiązań technologicznych pochodzących z przemysłu motoryzacyjnego może być bezpośrednio, lub poprzez pewne dostosowania, wykorzystanych również do autonomicznej nawigacji morskiej. Głównym pytaniem jest więc nie to, czy wdrożenie nawigacji autonomicznego statku jest technicznie możliwe, ale jak stworzyć odpowiednie połączenie technologii i metod, które zapewniają wystarczający stopień wydajności i niezawodności, wymagany do praktycznego funkcjonowania dużych statków przy rozsądnych kosztach. Kluczowym aspektem jest pomyślnej autonomii pojazdów to niezawodność i bezpieczeństwo. Pomimo wszystkich ostatnich postępów technologicznych, nie zostały przedstawione przekonywujące demonstracje wystarczająco wiarygodnej nawigacji autonomicznego samochodu w zmieniających się warunkach rzeczywistych. Nawet najbardziej zaawansowane i powszechnie sprawdzone rozwiązania motoryzacyjne, takie jak samochody autonomiczne Google nadal walczą, czy poradzą sobie z nieznanymi środowiskami i nieoczekiwanymi zdarzeniami, wymagającymi
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
13
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
interwencji człowieka od czasu do czasu. Co ważniejsze, tolerancja dla ekstremalnych warunków pogodowych jest znaczącym wyzwaniem, które do tej pory nie zostało w pełni rozwiązane. Publikowane morskie rozwiązania zostały dotychczas realizowane na małych łodziach i tylko np. z ograniczonym wykorzystaniem połączenia czujników i autonomią oraz zazwyczaj w dość łagodnych warunkach pogodowych. W projekcie AAWA od samego początku skupiano się na trudnych, ale nadal realistycznych warunkach, a także na szczególnych wyzwaniach autonomii i wdrożeniu zdalnego sterowania nawet dla dużych statków oceanicznych. Będzie to możliwe dzięki ścisłej współpracy pomiędzy naukowcami i partnerami przemysłowymi. Mając na celu wdrożenie autonomicznej nawigacji i reaktywnego zapobiegania kolizjom, zastosowana aplikacja morska przedstawia zarówno zalety, jak i wyzwania w porównaniu z innymi autonomicznymi pojazdami. Ponieważ prędkość statku jest raczej niewielka, interpretacja danych czujnika SA i manewrów nawigacji nie musi być tak szybka, jak np. w przypadku aplikacji samochodowych. Statek nie jest również ograniczony np. wąską drogą co powoduje, że unikanie kolizji z innymi statkami jest znacznie łatwiejsze. Z drugiej strony bezwładność statku jest znaczna i nie jest możliwe np. wykonanie ostrego zakrętu lub szybkiego zatrzymania jednostki. Ważnym aspektem, który należy wziąć pod uwagę jest również to, że w przyszłym scenariuszu liczba autonomicznych statków będzie znacznie mniejsza od przewidywanej liczby samochodów autonomicznych. Chociaż nie jest możliwe zastosowanie zdalnego monitoringu przez człowieka (ze względu na centrum sterowania) dla miliardów autonomicznych samochodów, to centra kontroli brzegowej przeznaczone dla autonomicznych statków są możliwe. Centra takie mogą nadzorować działanie wielu statków, w razie potrzeby mogą również zastosować zdalne sterowanie. W raporcie przyjrzymy się bliżej dostępnym technologiom, które można zastosować do autonomii statków i pozostałych przed nami wyzwań, w celu uzyskania przed rokiem 2017r. wymaganej gotowości technologicznej dla strony przedstawiającej dowód omawianej koncepcji. 1. Autonomiczna nawigacja statku 1.1. Sterowanie reaktywne i planowanie ścieżki dla nawigacji bezkolizyjnej Problem unikania kolizji między statkami cieszyło się dużym zainteresowaniem po II wojnie światowej, a zostało to wywołane szybkim rozwojem radaru i gwałtownym wzrostem ruchu na morzach. Unikanie kolizji odgrywa istotną rolę w codziennej pracy marynarza, a ponieważ krytyczne decyzje człowieka są wysoce subiektywne, aby pomóc nawigacji, międzynarodowe zasady dotyczące unikania kolizji na morzu (COLREGs) są opracowywane przez Międzynarodową Organizację Morską (IMO). Techniki ruchu bezkolizyjnego można podzielić na metody globalne, oparte na planowaniu ścieżek, wykorzystując informacje priori lub lokalne metody, oparte na reaktywnej nawigacji przy użyciu informacji z czujników. Podczas planowania ruchu przewidywana droga jest określana przez obliczanie geometrycznej trajektorii, unikając znanych przeszkód, które w realnych niepewnych środowiskach mogą doprowadzić do kolizji. W reaktywnej nawigacji rzeczywistość środowiska podczas ruchu jest uwzględniana przy użyciu bardzo szybko powtarzającego się procesu spostrzeżenie - działanie. [Statheros, 2008], [Pietrzykowski, 2009], [Tam, 2009], [Campbell, 2012].
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
14
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Przykład samochodu autonomicznego
Rysunek 1. Porównanie źródeł strumieniowych samochodowych i morskich Planowanie drogi bezkolizyjnej dla maszyny autonomicznej poprzez środowisko zawierające nieruchome lub poruszające się przeszkody, w tym przypadku statek przemieszczający się zarówno w obszarze portu, jak i na otwartym morzu, jest problemem, który w ciągu ostatnich dziesięcioleci został obszernie przeanalizowany. Jest rzeczą wiadomą, że różne systemy wymagają różnych strategii planowania. Ponadto podczas planowania ścieżki należy uwzględnić kinematyczne i dynamiczne ograniczenia dla statku, które mogą utrudnić wykonanie planowanych manewrów. Na przykład: promień skrętu statku ogranicza minimalny kąt obrotu dopuszczalny dla ścieżki. Należy również wziąć pod uwagę dynamikę statku, tzn. fakt, że promień skrętu statku zależy również od prędkości jednostki. Przy planowaniu ścieżki dla autonomicznych statków uwzględnia się również elementy środowiskowe. Warunki pogodowe mają również znaczny wpływ na wybór najlepszej drogi. Wyzwania związane z reaktywną nawigacją wynikają głównie z niestabilności sterowania w pętli zamkniętej, ze względu na dynamiczne właściwości statku i cechy środowiska otaczającego (fale, wiatr, prąd morski) oraz ze względu na konieczność uzyskania właściwej informacji z działających czujników statku. [Statheros, 2008], [Pietrzykowski, 2009], [Tam, 2009], [Campbell, 2012], [Elkins 2010].
Szczegółowe mapy środowiska
(3D)
Oszacowanie lokalizacji i
pozycjonowania samochodu
Nawigacja i reaktywne
unikanie kolizji
Kamery i radary krótkiego zasięgu
Świadomość sytuacyjna (SA)
LIDAR (+kamery i
radary GPS czujniki
inercyjne
Przetwarzanie danych
czujników
Elektroniczne mapy nawigacyjne (mniej dokładne)
Proponowane przez AAWA morskie źródło strumieniowe
Kamery i radary krótkiego zasięgu
Świadomość sytuacyjna (SA)
Przetwarzanie danych
czujników
+ radary długiego zasięgu
LIDAR (+kamery i
radary
wykonane wstępne testowanie
będzie również badane
GPS czujniki
inercyjne + pogoda
Oszacowanie lokalizacji i
pozycjonowania samochodu
Nawigacja i reaktywne
unikanie kolizji
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
15
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Dwa najbardziej popularne stanowiska w stosunku do planowania ścieżki to rozwiązania oparte na wykresie i próbkowaniu. Rozwiązania oparte na wykresach, takich jak A* i D* oraz ich rozliczne warianty, stanowiły najbardziej przebadane algorytmy problemów planowania optymalnej ścieżki. Główną zaletą rozwiązań opartych na próbkowaniu, takich jak probabilistyczna mapa drogowa (PRM) i szybkie badanie drzewa losowego (RRT) oraz ich wariantów, stanowi możliwość łatwego uwzględnienia dynamicznych i kinematycznych ograniczeń dla pojazdu. Dla uniknięcia reaktywnych przeszkód, takie rozwiązania planowania optymalnej ścieżki mogą nie być wystarczająco wydajne. Dlatego też często stosuje się algorytmy, takie jak ograniczenia prędkości. [Campbell, 2012], [Casalino, 2009], [Lalish, 2012], [Evans, 2008], [Sharma, 2012], [Statheros, 2008] i [Tam, 2009]. 1.2. System Autonomicznej Nawigacji (ANS) AAWA W AAWA opracowywane jest rozwiązanie integracji architektury kompletnej autonomicznej nawigacji statku, która wykorzystuje system Dynamicznego Pozycjonowanie (Dynamic Positioning – DP) Rolls-Royce opracowany dla przyszłych autonomicznych statków i łączy go z Automatycznym Systemem Nawigacji (Automatic Navigation System – ANS) zawierający Znajomość Sytuacji (Situational Awareness – SA), Unikanie Kolizji (Collision Avoidance – CA), Planowanie Trasy (Route Planning – RP), moduły Definicji Stanu Statku (Ship State Definition – SSD) opracowane w ramach projektu AAWA. Rysunek 2 przedstawia schemat architektury ANS. System Znajomości Obrazu Sytuacji
Rysunek 2. Architektura Systemu Autonomicznej Nawigacji (ANS).
Najwyższym poziomem w systemie ANS jest moduł Definicji Stanu Statku (Ship State Definition – SSD) lub „wirtualny kapitan" (VC), który łączy w sobie informacje z różnych podsystemów ANS (SA, DP, RP i CA), a także z innych systemów automatyki statku, a operator określa aktualny stan systemów statku. Stan statku determinuje dopuszczalny tryb pracy statku, taki jak tryb autonomiczny, zdalne sterowanie lub tryb bezpieczny w wypadku awarii. Informacje o stanie z VC są również wykorzystywane i nieustannie informują operatora o aktualnym stanie statku. Dynamiczne systemy pozycjonowania pozwalają statkowi automatycznie utrzymywać jego pozycję lub kurs, używając swoich śrub napędowych, sterów i sterów strumieniowych. W przypadku połączenia z globalnym lub lokalnym odniesieniem pozycjonowania, np. Global Navigations Satellite System (GNSS), z czujnikami wiatru i zespołami pomiarów inercyjnych (Inertial Measurement Units – IMU), statek jest w stanie utrzymać pozycję nawet w trudnych warunkach pogodowych. Nowoczesne systemy DP, takie jak Rolls Royce Icon DP, są w stanie również manewrować statkiem przy niskiej prędkości. Pozwala to na integrację prawidłowego zachowania autonomicznego w sterowaniu statkiem. Ponieważ system DP już zawiera informacje o zdolnościach manewrowania statku, jest on w stanie obliczyć, jakie położenie może przyjąć jednostka w najbliższej przyszłości.
Czujniki znajomości sytuacji
Połączenie czujników
System sterowania napędem
System pozycjonowa-
nia dynamiczne-
go
Moduł planowania drogi
Moduł znajomości sytuacji
Moduł unikania kolizji
Moduł określania stanu statku
Syst
em N
awig
acji
Aut
onom
iczn
ej
Łącze danych
Zdalny operator
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
16
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Takie dynamiczne ograniczenia ruchu statku są przekazywane modułowi CA, aby umożliwić bardziej efektywne planowanie ścieżek lokalnych. Moduł Planowania Trasy (RPM) jest modułem oprogramowania, który jest odpowiedzialny za planowanie trasy od początku do końca, poprzez wstępnie zdefiniowanie punktów trasy, jednocześnie unikając przeszkód statycznych określonych na elektronicznych mapach nawigacyjnych i na ścieżkach żeglugi, jeżeli jest to wskazane. Moduł ten jest ściśle związany z planowaniem rejsu, który jest aktualnie realizowany przez załogę statku. Jednak moduł RP wykorzystuje planowany rejs jako istotną informację podczas planowania rzeczywistej trasy dla jednostki. Trasa składa się z określonych punktów drogi, kursów i prędkości statku. Moduł RP nie planuje tras w czasie rzeczywistym, ponieważ moduł CA jest odpowiedzialny za wykonywane takich wymaganych manewrów, aby uniknąć przeszkód. Moduł unikania kolizji (CA) jest odpowiedzialny za bezpieczne i bezkolizyjne nawigowanie. Wykorzystuje informacje z modułu Planowania Trasy, aby postępować zgodnie ze ścieżką, która prowadzi do celu, ale może również odejść od kursu, jeśli wykryta zostanie możliwość zagrożenia kolizją. Moduł SA dostarcza mapę lokalną i informacje o przeszkodach, pokazujące obecne przeszkody znajdujące się w pobliżu statku. Moduł DP dostarcza do modułu CA informacje dotyczące obszaru, w którym statek jest zdolny do określonego manewru i w ten sposób tworzy granice dla nowych punktów trasy, które można realnie wyznaczyć. Moduł CA posiada dwie główne funkcje: pierwsza to ocena ryzyka kolizji, druga służy do bezpiecznego nawigowania statkiem zarówno w porcie, jak i na otwartym morzu. Po wykryciu ryzyka kolizji od modułu SSD wymagany będzie odpowiedni stan informacji, w którym ostateczna definicja stanu statku będzie określana na podstawie wszystkich danych uzyskiwanych z różnych podsystemów. Moduł ANS znajomości obrazu sytuacji (SA) jest podłączony do wielu urządzeń czujnikowych różnych typów. Moduł SA łączy dane pochodzące z czujnika i pobiera od niego informacje istotne dla określenia stanu otoczenia statku, które mogą być również wykorzystywane przez system CA. Moduł SA może również wykonać redukcję niektórych danych z czujników dla poprawienia wydajności komunikacji danych off-ship. Zagadnienia dotyczące rozwoju technologii związane z systemem SA i czujnikami statku omówiono w sekcji 2 i 3. 1.3. Mapowanie środowiskowe i wykrywane przeszkód dla nawigacji autonomicznego
statku Mapowanie to inaczej odwzorowanie świata. Istnieje wiele sposobów, na jakie proces mapowania może być realizowany i jaki rodzaj prezentacji świata jest tworzony. Są one uzależnione od aplikacji, w których mapy są używane i od czujników wykorzystywanych do obserwacji środowiska. Informacje pobierane z map są wykorzystywane do planowania tras, unikania przeszkód lub lokalizowania autonomicznego statku. Na morzu i w obszarach portowych możliwe jest użycie map morskich i terenowych w celu uzyskania informacji o szlakach żeglugowych, mieliznach, rafach i terenach przybrzeżnych. Dynamiczne przeszkody, np. w postaci innych statków, są odwzorowywane przy użyciu systemu świadomości sytuacyjnej statku, w połączeniu z danymi AIS. Opracowano wiele metod przetwarzania danych percepcyjnych dotyczących modelowania i przedstawiania świata w 2D lub 3D, np. mapy siatki zajętości (obłożenia), siatka wysokości i mapy typu Quadtree. [Mooney] Dwa najczęstsze sposoby przedstawienia świata to mapy topologiczne i metryczne. Metody topologiczne opisują wzajemne położenie określonych lokalizacji przestrzennych w danym środowisku, podczas gdy mapy metryczne opisują świat poprzez prezentację geometryczną. Mapy topologiczne najlepiej nadają się do planowania ścieżki wysokiego poziomu oraz misji. Mapy metryczne zawierają informacje geometryczne, które są konieczne aby zaplanować i bezpiecznie zrealizować wymagane trajektorie, jednocześnie unikając kolizji. Proces mapowania tworzy prezentację otaczającego świata. [Elfes, 1987], [Broten 2012]. Przeszkody mogą być przedstawiane jako fragmenty mapy, ale może też korzystnym okazać się
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
17
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
prezentowanie przeszkód dynamicznych oddzielnie. Wykrywanie i śledzenie obiektów jest ściśle powiązane z procedurami unikania przeszkód i razem zapewniają one bezkolizyjną nawigację statku. Istnieje kilka metod opracowanych w celu śledzenia przeszkód, powszechnie stosowane są filtry Kalmana cząstkowe i rozszerzone. Gdy wykorzystywana jest osobna prezentacja dla przeszkód dynamicznych, z wykorzystaniem nowych technik połączenia czujników oraz komercyjnych funkcji śledzenia obiektów statku [ARPA], ich ruchy i działania mogą być łatwiejsze do przewidzenia. Na przykład przeszkody mogą mieć stałą prędkość lub wstępnie ustaloną ścieżkę, a także określone właściwości kinematyczne, które mogą być wykorzystane do przewidywania ich pozycji w przyszłości. [Sinisterra, 2014] 2. Świadomość sytuacyjna (SA) – obraz sytuacji dla autonomicznych statków 2.1. Sensoring środowiska statku Metody połączenia wielu typów czujników, takich jak LIDAR, kamery i radary były już aktywnie badane w zastosowaniach motoryzacyjnych [Herpel, 2008], [Mukhtar, 2015]. Na przykład radar bliskiego zasięgu lub LIDAR może zapewnić dokładne określenie zasięgu, szybkości i kątowego pomiaru obiektów, a tańsze i mniejsze kamery mogą zapewnić lepszą rozdzielczość przestrzenną dla prawidłowej klasyfikacji obiektów. Kamery Near-IR (NIR), z aktywnym oświetleniem, lub termiczne kamery LWIR mogą być wykorzystywane również do fotografowania nocnego. Z drugiej strony użycie radaru umożliwia działanie również w trudnych warunkach pogodowych (np. ulewny deszcz lub śnieg), w przypadku których zwykłe kamery (w tym IR) mogą zawieść. Podobne kwestie dotyczą również czujników morskich SA. Głównym problemem przy prawidłowym połączeniu czujników jest powiązanie danych z różnych źródeł i czujników w taki sposób, aby optymalna percepcja SA była zagwarantowana we wszystkich warunkach oraz we wszystkich sytuacjach. Dane SA są następnie wykorzystywane do mapowania lokalnych przeszkód, aby zapewnić możliwość reaktywnego unikania kolizji. 2.1.1 Technologie czujników dla świadomości sytuacyjnej Kamery Kamery są naturalnym wyborem dla SA. Są one tanie (z pewnymi wyjątkami), małe i trwałe oraz oferują bardzo dużą rozdzielczość przestrzenną z istotnymi informacjami o kolorystyce, pozwalających na identyfikację obiektów. Uzyskanie rzeczywistego obrazu w nocy jest możliwe dzięki termicznym rejestratorom obrazów na podczerwień, a para kamer może być zastosowana w stereoskopowej konfiguracji do (ograniczonego) wykrywania 3D. Ze względu na ogromną gamę zarówno komercyjnych jak i podrzędnych aplikacji, technologia kamer wciąż się poprawia. Duża istniejąca baza wiedzy na temat algorytmów analizy wizualnej dostarcza wielu potencjalnych rozwiązań także dla morskiej świadomości sytuacyjnej. Kamery HD na normalne spektrum wizyjne są postrzegane jako ważna technologia, którą należy połączyć z innymi danymi sensorycznymi. Wysoka rozdzielczość przestrzenna pozwala na rozpoznawanie obiektów i przeszkód, przez operatora zdalnego - człowieka lub poprzez algorytmy automatycznej analizy, a informacje o kolorach mogą pomóc w separacji (odróżnieniu) istotnych obiektów od tła (powierzchni morza). Pewną wadą kamer jest ogromna ilość danych, generowanych przez czujniki wysokiej rozdzielczości, które wymagają dużej wydajności przetwarzania i łącza danych o dużej szerokości pasma dla transmisji wyników oraz ich analizy. Jednak biorąc pod uwagę ewentualne wdrożenie morskiego SA na dużym statku, wymagania dotyczące np. małego rozmiaru lub niewielkiego poboru mocy przez sprzęt do przetwarzania danych, są znacznie mniej ostre niż w wielu innych autonomicznych jednostkach, takich jak samochody lub samoloty. Cyfrowe kamery na spektrum wizyjne mają pewne poważne ograniczenia: nie można ich używać w ciemności (poza wykrywaniem świateł), a ich spostrzeganie odległości szybko spada w złych warunkach pogodowych, takich jak mgła lub ulewny deszcz. Lepszą wydajność można uzyskać dzięki kamerom pracującym w zakresie podczerwieni (IR). Czujki Near-IR (NIR) są powszechnie
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
18
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
stosowane do obserwacji nocnych w kamerach zabezpieczających, ponieważ sygnały NIR można przechwytywać za pomocą niedrogich czujników kamer CMOS / CCD. Wymaga to jednak aktywnego oświetlenia miejsca na podczerwień, co nie jest zbyt praktyczne w wypadku statku SA. Prawdziwa pasywna obserwacja nocna może być realizowana za pomocą kamer Long-Wave IR (LWIR), które są wrażliwe na promieniowanie podczerwone w zakresie długości fali 8÷14 µm. Ponieważ promieniowanie cieplne LWIR jest biernie emitowane przez wszystkie obiekty, czujniki LWIR mogą być używane do obrazowania otoczenia w całkowitej ciemności. Ze względu na zmieniające się właściwości emitancji ciepła, w zależności od np. materiałów wierzchnich i geometrii powierzchni, można tworzyć wizualnie znaczący obraz nawet wśród obiektów i miejsc, gdzie średnia temperatura jest faktycznie stała. Jak widać na rysunku 3, obrazowanie termiczne może być korzystne nawet w warunkach dziennych, np. w trudnych warunkach oświetleniowych.
Rysunek 3. Scena w świetle dziennym uchwycona za pomocą normalnej kamery i kamery cieplnej
Kamery termowizyjne z oparciu o technologię mikrobolometru LWIR stanowią najbardziej dostępną technologię zobrazowania termicznego. Ponadto, w odróżnieniu od innych technologii IR, czujniki bolometru nie wymagają chłodzenia kriogenicznego, co prowadzi do prostszego (a w rezultacie solidniejszego) sprzętu – kamery. Wadą czujników LWIR opartych na bolometrze jest ich niska rozdzielczość (zwykle 640x480 pikseli, wprawdzie czujniki megapikselowe są dostępne, ale są one bardzo kosztowne), tzn. dla tej samej dokładności przestrzennej, pole widzenia (FOV) jest węższe niż w normalnej kamerze HD , jak widać z Rysunku 4.
Rysunek 4. Połączenie światła wizualnego i obrazowania termicznego w nocy
Ostatnio technologia kamer na podczerwień krótkofalową [SWIR – Short Wave IR)] stała się dostępna zarówno dla nie-wojskowych, jak i naukowych zastosowań [Stark, 2015]. Czujniki SWIR działają w zakresie długości fali 1-3 µm, gdzie wykrywany sygnał nie jest biernie emitowany [cieplnie], ale jest promieniowaniem odbitym. Czujniki SWIR zapewniają lepszą widoczność przez zamglenie lub mgłę niż kamery pracujące w zakresie spektrum wizyjnego i działają również w bardzo słabych warunkach oświetleniowych, chociaż nie w całkowitej ciemności. Stwierdzono, że
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
19
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
SWIR umożliwia lepszy zakres wykrywania w wilgotnych i mglistych warunkach niż LWIR [Wallace, 2013]. Jednakże technologia SWIR jest obecnie droższa niż np. LWIR i nie poprawia rozdzielczości przestrzennej. Chociaż czujniki na podczerwień oferują lepszą widoczność niż kamery na zakres światła widzialnego, ich wydajność również pogarsza się przy złej pogodzie. Na przykład różne pasma podczerwieni są tłumione różnie w zależności od stopnia wilgotności atmosfery, co może prowadzić do znacznego zróżnicowania zakresów widzialności w zależności od warunków pogodowych [Beier, 2004]. Dlatego też źródło czujnikowe, które jest odporne na działanie warunków pogodowych, takie jak np. radar, należy połączyć z mniej niezawodnymi danymi z kamery. Radar i LIDAR Określanie parametrów w oparciu o dane z kamery [połączenie wizualnego i termicznego obrazowania] ma dwie istotne wady w odniesieniu do pobierania SA w pojazdach autonomicznych: 1] niedostateczna tolerancja na warunki atmosferyczne i 2] brak łatwego sposobu na uzyskanie właściwej informacji o odległości obiektu. Można zastosować kombinację dwóch kamer jedno-okularowych do wykonania obrazowania stereo, tj. utworzyć mapę 3D sceny wizualnej poprzez odwzorowanie różnic między dwoma obrazami. Wadą obrazowania stereo jest złożoność obliczeniowa związana z dużą liczbą danych pobieranego obrazu stosowanych w algorytmie dopasowywania do systemu stereo. Również wybór linii odniesienia kamery, tj. fizycznej separacji dwóch czujników, skutecznie określa ograniczenia dotyczące zdolności systemu do rozpoznawania odległości. Dużo lepszą wydajność można uzyskać przy użyciu technologii aktywnych czujników, takich jak radar lub LIDAR. W zastosowaniach morskich wykorzystywanie radaru ma długą historię. Dlatego na rynku można znaleźć kilku dostawców systemów radarowych dla wykrywania przeszkód i mapowania. Na wydajność radaru wpływa pasmo częstotliwości roboczej radaru, ponieważ zwykle wyższe częstotliwości zapewniają lepszą rozróżnialność kątową i określanie odległości. Istnieje wiele radarów dostępnych na rynku, przeznaczonych do różnych celów, mających określone częstotliwości nośne, szerokość pasma, czas trwania transmisji, kształty fali, anteny itp. Zwykle radary morskie są radarami mikrofalowymi, wykorzystującymi pasma S lub X, które są odpowiednie dla różnych warunków pogodowych. [Heuel, 2013] Jednak rozdzielczość tradycyjnego radaru morskiego może być niewystarczająca dla reaktywnego unikania kolizji. Na przykład, biorąc pod uwagę autonomiczny statek lub zbliżający się do nabrzeża w obszarze portu, rozdzielczość radaru w najbliższym otoczeniu, tj. w granicach kilkuset metrów, powinna być wystarczająco duża aby wykryć, a być może śledzić, nawet niewielkie stacjonarne i poruszające się obiekty. Nowe radary na pasmo Ka i W, opracowane pierwotnie dla zastosowań motoryzacyjnych, mogą być również przydatne w aplikacjach statków autonomicznych, szczególnie w przypadku konieczności wykrywania przeszkód w bardzo bliskim otoczeniu. Oferują one znacznie lepszą rozróżnialność kątową i odległościową niż tradycyjne radary statku, kosztem zredukowanego zasięgu. Takie nowe typy radarów wraz z nowoczesnymi radarami na pasmo S-i X i kilkoma różnymi typami kamer są wykorzystywane w omawianym projekcie rozwoju, aby umożliwić reaktywne uniknięcie kolizji w pobliskim otoczeniu, a także autonomiczną nawigację np. w obszarach portowych. [Skolnik, 2008], [Seliga, 2010] Skaning laserowy (Light Detection And Ranging) LIDAR (lub LAser Detection And Ranging, LADAR) jest technologią czujników laserowych skanujących, która może zapewnić bardzo dokładne pomiary odległości. Urządzenia wielokanałowe (np. z systemem laserowym 64), takie jak te stosowane w autonomicznych samochodach testowych Google, mogą stworzyć bardzo szczegółową mapę 3D otoczenia pojazdu. Nawigację morską na bazie LIDAR zaproponowano i przedstawiono np. w [Jimenez, 2009], [Pastore, 2010] i [Halterman, 2010].
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
20
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Rysunek 5. Na lewo: widok radarowy obiektu. Na prawo: dane skanowania 3D LIDAR Jedną z pewnych wad technologii LIDAR jest fakt, że do operacji skanowania używa ona szybko przemieszczających się elementów mechanicznych, które mogą być podatne na awarie, zwłaszcza przy pracy przez dłuższy czas w trudnych warunkach morskich. Ponieważ LIDAR stosuje wiązkę laserową (zwykle laser impulsowy IR), jego zakres i dokładność zależy również od niekorzystnych warunków pogodowych, takich jak mgła, deszcz i śnieg, podobnie jak w przypadku kamery IR. 2.2. Połączenie danych z czujników i przetwarzanie W praktycznie wszystkich dziedzinach związanych z autonomią pojazdów, wykorzystanie połączenia czujników była postrzegane jako klucz do osiągnięcia wystarczającej niezawodności przy określaniu świadomości sytuacyjnej. Każdy osobny typ czujnika wykazuje szczególne wady i ograniczenia w niektórych warunkach (pogoda) lub problemy z ustawieniem jakości wykrywania (zakres, pole widzenia, identyfikacja). Ponadto nigdy nie można całkowicie zapobiec zarówno fałszywym pozytywnym, jak i fałszywym negatywnym wskazaniom dla jednego czujnika; zoptymalizowanie jednego prowadzi do zniekształceń pochodzących z drugiego. Łącząc możliwości różnych metod wykonania wielu czujników, takie indywidualne błędy i uchybienia można uśrednić oraz można osiągnąć lepszą wydajność całkowitą. Tabela 1 zgrubnie porównuje różne potencjalne typy czujników pod względem parametrów wydajności, odnoszących się do morskiego SA. Tabela 1. Porównanie różnych czujników morskich SA. Wizualne kamery
HD Kamery na
podczerwień Radar
okrętowy Radar krótkiego
zasięgu LIDAR Dźwięk
Dokładność przestrzenna ++ + - - - ++ - -
Pole widzenia + - ++ - + ++
Pomiar odległości - - ++ ++ ++ - -
Identyfikacja obiektu ++ + - - - - + +
24H, wszystkie operacje pogodowe - - + ++ ++ + (?) -(?) Obciążenie obliczeniowe analizy - - - ++ ++ - - + Odporność na warunki morskie ++ ++ ++ +(?) (?) (?)
Cena ++ - +- ++ - - +
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
21
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Na podstawie przeglądu istniejących rozwiązań przedstawianych w różnych dziedzinach autonomii i testowaniu technologii czujników już dokonanego w AAWA, połączenie różnych typów radarów i czujników wizualnych, w tym kamer termicznych na podczerwień, jest postrzegane jako możliwe rozwiązanie dla określania morskiej świadomości sytuacyjnej. Radary umożliwiają łatwe śledzenie odległości celu i mogą zapewnić wymaganą tolerancję przy złej pogodzie. Zastosowanie nowych radarów high-GHz opracowanych w celu zapobiegania kolizjom samochodowym może również zapewnić wystarczającą dokładność wykrywania obiektów w zakresach, które są zbyt krótkie i zbyt niedokładne dla konwencjonalnego radaru statku. Kamery mogą uzupełnić dane radarowe, dostarczając bardziej szczegółowych informacji na temat wykrytych obiektów. Ponadto połączenie kamer i radaru może również zwiększyć zdolność wykrywania obiektów. Termiczne kamery na podczerwień mogą widzieć obiekty także w całkowitej ciemności, natomiast informacje o kolorze z normalnych kamer HD można wykorzystać do segregowania obiektów na wodzie. Istotne znaczenie ma również możliwość zakupu systemu czujników. Chociaż wiele urządzeń czujnikowych wysokiej klasy może stanowić cenne uzupełnienie do systemu SA, należy stosować rozwiązania korzystające z dostępnych technologii. W tym znaczeniu, połączenie radaru i systemu wizyjnego ma przewagę nad np. czujnikami LIDAR. Sygnalizacja dźwiękowa (np. syreny) jest również integralną częścią obecnego procesu nawigacji morskiej. Dlatego też, aby zrealizować system SA, który ma być co najmniej tak samo odpowiedzialny, jak załoga ludzka, należy również uwzględnić przechwytywanie dźwięków i analizę otrzymanych danych. Ponieważ głośne i czyste dźwięki, np. syreny i gwizdki mogą być dość łatwo wykryte, ich źródła powinny również zostać dokładnie zlokalizowane względem statku, aby pomóc w reaktywnym unikaniu kolizji. Wymaga to więcej działań niż tylko uchwycenie i wykrycie dźwięku, źródło dźwięku również powinno zostać zlokalizowane przestrzennie, np. za pośrednictwem szeregu mikrofonów i uzyskanych danych dźwiękowych połączonych z innymi rodzajami czujników. Czujniki dźwięku mogą być również zastosowane w bardziej ogólny sposób w systemie SA, w celu wykrywania i identyfikacji innych statków przez dźwięki, które emitują one normalnie. Przetwarzanie danych z czujników Najbardziej intensywną obliczeniowo częścią strumienia danych przy połączeniu czujników jest analiza danych dostarczonych przez kamery. Sygnały wyjściowe generowane przez radary nie są zwykle zbyt zagęszczone (obiekty z pewnym szumem) i dlatego znacznie łatwiej je przetwarzać. Ważną częścią przetwarzania danych obrazu jest segmentacja danych wejściowych. Kamery wideo wysokiej rozdzielczości dostarczają ogromnych ilości danych, z których większość jest nieistotna dla procesu wykrywania obiektów i właściwego zrozumienia zawartości obrazu. Pierwszym krokiem w procesie analizy obrazu będzie zatem rozdzielenie pierwotnych danych wejściowych, tzn. usunięcie wszystkich informacji, które nie są istotne dla konkretnego zadania (tła) spośród tych elementów i obiektów, które powinny zostać wykryte (pierwszy plan). W przypadku zmniejszonej liczby danych obrazu można zastosować bardziej złożone algorytmy analizy dla śledzenia obiektów przestrzennych i tymczasowych oraz dla klasyfikacji obiektów. Na przykład można założyć, że scena morska składa się zawsze z trzech różnych zgrubnych obszarów: wody w dolnej części obrazu, nieba w górnej jego części i horyzontu w środku. Dzięki znajdowaniu linii horyzontu, duża część dostarczonych danych obrazu może zostać usunięta i pominięta w dalszym przetwarzaniu. Można także zastosować połączenie czujników, upraszczając proces przez zastosowanie informacji z czujników wykonanych inną technologią, które uzupełniają strumień danych z przetwarzanego obrazu. Na przykład wykrycie (lub jego brak) obiektów w zasięgu radaru może być zastosowane do prowadzenia algorytmu segmentacji obrazu oraz do większej koncentracji na potencjalnych obszarach obiektu, a fałszywe wykrycia mogą być odrzucane z danych obrazu, jeśli będzie zapewnione odpowiednie zaufanie do danych radarowych.
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
22
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Rysunek 6. Wykrywanie horyzontu i segmentacja obiektu
Dane z wielu czujników mogą być łączone na różne sposoby, jak to zilustrowano na rysunku 7. Połączenie na niskim poziomie odbywa się na pierwotnych lub prawie nieprzetworzonych danych z różnych czujników, natomiast w połączeniu wysokiego poziomu oddzielne strumienie danych są przetwarzane indywidualnie a dane o wykryciu pochodzące z różnych czujników są łączone na poziomie obiektu. Wykorzystanie niskopoziomowej syntezy jest bardziej naturalne między dwoma różnymi typami kamer, takimi jak czujniki wizualne i termiczne, natomiast połączenie między kamerami i radarami może być bardziej naturalnie wykonane na wyższym poziomie dla obiektu. W praktyce najskuteczniejszym sposobem na wykonanie połączenia danych z czujników między wieloma (> 2) różnymi rodzajami czujników jest prawdopodobnie kombinacja zarówno podejść do łączenia danych na wysokim poziomie, jak i na niższym poziomie. W procesie łączenia czujników morskich, radar może być wykorzystany do dostarczania kątów namiaru i pomiaru odległości dla różnych obiektów na interesującym nas obszarze. Informacje te mogą być odwzorowane jako odpowiednie obiekty przy wydzieleniu danych z wielu kamer, aby uzyskać więcej szczegółów. Obecność tego samego obiektu przedstawionego w danych pochodzących z wielu czujników zapewnia bardziej skuteczne wykrywanie niż źródło z pojedynczego czujnika, które może zawsze dostarczyć dane zaszumione lub niekompletne. Wyniki analizy ramka do ramki często zawierają szum, a obiekty są czasami tracone z uwagi na niepewność analizy. Dla reaktywnego unikania kolizji przestrzenne i czasowe śledzenie obiektów może zostać zastosowane w celu dostarczenia ciągłej świadomości sytuacyjnej. W celu osiągnięcia najlepszej możliwej niezawodności autonomicznej nawigacji, wszystkie inne dostępne źródła danych, które mogą pomóc w nawigacji statku i w procesie unikania kolizji, powinny być również łączone z danymi czujników pokładowych. Obejmują one już powszechnie stosowane technologie, takie jak GPS, AIS, ARPA i ECDIS, których sygnały wyjściowe mogą zostać połączone z danymi uzyskanymi z czujników poprzez przedstawienie map lokalnych wysokiego poziomu i globalnych. 3. Komunikacja off-ship Zdolność do zdalnej interakcji i kontrola człowieka powinna zostać umożliwiona przede wszystkim w sytuacjach, w których autonomia statku nie może sama rozwiązać problemu lub nie uzyska pozwolenia na rozwiązanie takiego problemu. Przekazywanie informacji SA zebranych przez czujniki statku do operatora zdalnego może wymagać przekazania znacznych ilości danych. Ze względu na praktyczne ograniczenia, np. łączność satelitarna na otwartym morzu, ta sama przepustowość może nie być dostępna przez cały czas. Należy rozpatrzyć metody zmniejszania ilości danych pochodzących z czujników tylko do absolutnie koniecznego dla operatora-człowieka minimum - w celu odpowiedniego postrzegania otoczenia statku. Należy również zwrócić uwagę
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
23
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
na takie kwestie, jak zabezpieczenie danych (umyślne manipulowanie) i niezawodność łącza oraz możliwości wykorzystania wielu alternatywnych sieci komunikacyjnych (satelitarnych, VHF, 4G) w zależności od ich dostępności, należy także zbadać potrzeby związane z wydajnością sieci. Transmisja wideo HD ze statku do centrum kontroli brzegowej nie jest wymagana przez cały czas. Może być konieczna tylko wtedy, gdy zdarzy się coś nieoczekiwanego, wymagającego uwagi centrum kontroli na brzegu. Taka sytuacja może polegać na przykład na wykryciu przeszkody, która wymaga identyfikacji przez człowieka, lub sytuacji, w której statek nie jest w stanie obliczyć niezawodnego manewru w celu uniknięcia przeszkody. Zakłada się, że przez większość czasu rejsu na otwartym morzu, autonomiczny system kontroli jest w stanie poradzić sobie z aktualną sytuacją przy użyciu systemów czujnikowych na pokładzie (unikanie kolizji, wykrywanie obiektów itp.). W związku z tym przez większość czasu wymagana jest stosunkowo niewielka ilość danych wychodzących ze statku, takich jak informacja o stanie statku lub ograniczone dane z czujników. Z drugiej strony, w razie konieczności na podstawie krótkiej wiadomości powinna być bezpośrednio dostępna wystarczająco wysoka zdolność przesyłowa. Liczba danych, które powinny być przesyłane rośnie szybciej, gdy do systemu dodawane są dodatkowe czujniki, zwłaszcza przy transmisji wideo o wysokiej rozdzielczości. Tradycyjnie do zdalnego monitorowania przez łącza danych o małej szerokości pasma są stosowane redukcja współczynnika częstotliwości wyświetlania klatek, niższa rozdzielczość obrazu i skuteczna kompresja sygnału wideo. Jednak aby jeszcze bardziej zredukować wymagania dotyczące kanału przesyłania danych, dzięki systemowi przetwarzania SA na pokładzie wejścia wszystkich czujników mogą być podzielone na segmenty, aby wyodrębnić tylko minimalną ilość danych, które mogą być wystarczające dla zrozumienia i oceny sytuacji przez człowieka. Segmentacja wstępna na pierwszym planie lub w tle wykonywana przez system SA statku umożliwia transmisję tylko niektórych określonych właściwości, obiektów lub regionów zainteresowania (ROI), jak to zilustrowano na rysunku 8. Jednak w warunkach niekrytycznych operator mógłby wyodrębnić wystarczającą świadomość sytuacyjną z bardzo rzadkich poddanych segmentacji właściwości obrazu, co mogłoby pozwolić na przesyłanie bardzo małych ilości danych.
Rysunek 7: Segmentacja obrazu w celu ograniczenia prędkości transmisji danych. U góry po lewej: oryginalny obraz (1900x1080 px) z poddanymi segmentacji obiektami. U góry po prawej: 1-bitowe dane krawędziowe. Na dole po lewej: 1-bitowe dane obiektu. Na dole po prawej: Obszar zainteresowania wychwytuje obszar obiektu (241x145 px).
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
24
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
Na otwartym morzu głównym środkiem łączności jest sygnał z satelity, jednak łączność satelitarna może być zakłócana przez niekorzystne warunki pogodowe. Poziom tłumienia sygnału spowodowanego przez np. ulewny deszcz zależy od pasma częstotliwości wykorzystywanego przez sieć satelitarną. Na przykład zanik sygnału występuje znacznie bardziej intensywnie w paśmie Ka (powyżej 20 GHz) niż w paśmie L (1 do 2 GHz) [Qingling, 2006]. Oznacza to zwykle, że bardzo zła pogoda może pogarszać wydajność łącz działających w pasmach Ka. Jednak połączenie w systemie pasm typu Ka z np. mniej wrażliwą na pogodę siecią pracującą w paśmie L, jak to zostało zrealizowane w systemie Inmarsat Global Xpress, zmniejsza ryzyko utraty wszystkich komunikatów nawet wtedy, gdy system pasma Ka przestanie działać. System Inmarsat umożliwia dynamiczne przełączanie pomiędzy dwoma typami satelitów bez interwencji ze strony użytkownika. Jednak przy przydzielaniu szerokości pasma do łączności poza statkiem (off-ship) należy wziąć pod uwagę ograniczone możliwości oferowane przez satelity pracujące w paśmie L. W przyszłości może zaistnieć duża liczba autonomicznych statków, pracujących na tej samej wiązce satelitarnej lub obszarze komórki w danej sieci komórkowej. Ponieważ łączna szerokość pasma w określonej wiązce lub obszarze komórki jest dzielona między wszystkich użytkowników, może wystąpić niedobór wydajności danego pasma w sytuacji, kiedy wiele statków jednocześnie będzie wymagać dużej szerokości pasma dla np. dla transmisji wideo HD. Problem ten mógłby być rozwiązany przez tworzenie zgrupowań lub floty statków, w których jeden statek byłby głównym prowadzącym. W ten sposób łączność do centrali sterowania z wybrzeża mogłaby być koordynowana przez statek prowadzący zapewniając komunikację między dwoma statkami (ship-to-ship) w polu widzenia. W ten sposób możliwa byłaby optymalizacja wykorzystania szerokości pasma satelitarnego w określonym obszarze przez ograniczenie konieczności, aby wszystkie statki w zgrupowaniu komunikowały jednocześnie się z operatorem znajdującym się w centrum kontroli brzegowej. Przy wdrażaniu sterowania i „inteligencji" całego systemu autonomii poprzez „Wirtualnego Kapitana" należy starannie rozpatrzyć możliwe skutki wpływu na wydajność łączności niekorzystnych warunków pogodowych lub przeciążenia, wynikającego z powodu równoczesnego połączenia wielu użytkowników. Tego typu trudne sytuacje mogą również wystąpić, jeśli niesprzyjające warunki pogodowe spowodują jednocześnie zmniejszenie zdolności systemu SA, wymagające większej interwencji z brzegu w obrębie systemu sterowania lub w zakresie podejmowania decyzji, lub zmniejszenie wymaganej zdolności przesyłania danych przez łącze do przesyłania danych z czujników z statku. Należy określić prawidłowe zachowania i przewidzieć konieczne środki ostrożności wymagane w takich sytuacjach. Zagadnienia te zostały omówione w opracowaniu architektury ANS w AAWA, poprzez Wirtualnego Kapitana i omówionej wcześniej definicji stanu statku. Bibliografia 1. [Beier, 2004] K. Beier, H. Gemperlein: „Simulation of infrared detection range at fog conditions
for Enhanced Vision Systems in civil aviation" (Symulacja zasięgu wykrywania w podczerwieni w warunkach zamglenia dla systemów Enhanced Vision w lotnictwie cywilnym), Aerospace Science and Technology 8, pp. 63-71, Elsevier, 2004.
2. [Broten, 2012] G. Broten, D. Mackay and J. Collier, „Probabilistic obstacle detection using 2 1/2 D terrain maps" (Probabilistyczne wykrywanie przeszkód za pomocą mapy 2 1/2 D terenu), in Computer and Robot Vision fCRV), Ninth Conference On, pp. 17-23, 2012.
3. [Cambell, 2012] S. Cambell, W. Naeem, G.W. Irwin. „A review on ing the autonomy of unmanned surface vehicles through intelligent cession avoidance manoeuvres" (Przegląd dotyczący poprawy autonomii bezzałogowych pojazdów naziemnych dzięki inteligentnym manewrom unikania przekazania), Annual reviews in Control, 2012.
4. [Casalino, 2009] Casalino, G.; Turetta, A.; Simetti, E., „A three-layered architecture for real time path planning and obstacle avoidance for surveillance USVs operating in harbour fields" (Trójwarstwowa architektura planowania ścieżki w czasie rzeczywistym i unikania przeszkód dla nadzorujących urządzeń USV działających w obszarach portowych) in OCEANS 2009 -
-
AAWA Statki zdalnie sterowane i autonomiczne – następne kroki
25
AAWA Position Paper © Rolls-Royce plc Registered office: 62 Buckingham Gate, London, SW1E 6AT. Company number 1004142. Registered in England
EUROPE , vol., no., pp.1-8,11-14 May 2009 5. [Elfes, 1987] A. Elfes, „Sonar-based real-world mapping and navigation" (Mapowanie
rzeczywiste i nawigacja w oparciu o sonar) IEEE Journal Of Robotics and Automation, vol. 3, pp. 249-265,1987.
6. [Elkins, 2010] L. Elkins, D. Sellers: „The Autonomous Maritime Navigation (AMN) Project: Field Tests, Autonomous and Cooperative Behaviours, Data Fusion, Sensors, and Vehicles" (Projekt autonomicznej żeglugi morskiej: testy terenowe, zachowania autonomiczne i wspólne, synteza danych, czujniki i pojazdy), Journal of Field Robotics 27(6), pp. 790-818, 2010. DOI: 10.1002/rob.20367
7. [Evans, 2008] J. Evans, P. Patron, B. Smith, D. M. Lane,(2008), „Design and evaluation of a reactive and deliberative collision avoidance and escape architecture for autonomous robots" (Projektowanie i ocena reaktywnej i rozważnej architektury dla unikania kolizji i ucieczki dla autonomicznych robotów), Autonomous Robots, 24(3), 247-266. 2008.
8. [Franke, 2013] U. Franke, D. Pfeiffer, C. Rabe, C. Knoeppel, M. Enzweiler, F. Stein, R. Herrtwich: „Making Bertha See", Proc. of the 2013 IEEE International Conference on Computer Vision Workshops, pp. 214-221, 2013.
9. [Guizzo 2011] E. Guizzo: „How Google's Self-Driving Car Works", (Jak działa samo-jeżdżący samochód Google) IEEE Spectrum fhttp://spectrum.ieee.org/), 18 Oct 2011.
10. [Halterman, 2010] R. Halterman, M. Bruch: "Velodyne HDL64E LIDAR for Unmanned Surface Vehicle Obstacle Detection" (LIDAR Velodyne HDL64E dla jednostek bezzałogowych do wykrywania przeszkód), SPIE Proc. 7692: Unmanned Systems Technology XII, Orlando, FL, April 2010.
11. [Heuel, 2013] Heuel S., Radar Waveforms for A&D and Automotive Radar (Kształty fali radarowych dla A&D) i radaru samochodowego) , white paper, 2013.
12. [Herpel, 2008] T. Herpel, C.Lauer, R. German, J. Salzberger: "Trade-Off between Coverage and Robustness of Automotive Environment Sensor Systems" (Zgodność pomiędzy zasięgiem a solidnością systemów detekcji środowiska samochodowego), Proc. of International Conference on Intelligent Sensors, ISSNIP 2008, pp. 551-556, 2008.
13. [Jimenez, 2009] A.R. Jimenez, F. Seco: "A Short-Range Ship Nawigacji System Based on Ladar Imaging and Target Tracking for Improved Safety and Efficiency" (System nawigacji okrętowej krótkiego zasięgu określony na podstawie obrazu lokatora lasewrowego i śledzenia celów w celu poprawy bezpieczeństwa i jego efektywności), IEEE Transactions on Intelligent Transportation Systems, Vol. 10, No. 1, pp. 186-197, 2009.
14. [Lalish, 2012] E. Lalish,K. A. Morgansen, K. A. (2012). „Distributed reactive collision avoidance" (Rozproszone reaktywne unikanie kolizji), Autonomous Robots, 32(3), 207-226. 2012.
15. [Mooney]D. Mooney, "Metric Path Planning" (Planowanie ścieżki metrycznej), http://www.eecs.ucf.edu/~gitars/cap6671/Papers/metric planning.pdf
16. [Mukhtar, 2015] A. Mukhtar, L. Xia, T.B. Tang: „Vehicle Detection Techniques for Collision Avoidance Systems: A Review" (Techniki wykrywania pojazdów dla systemów unikania kolizji: przegląd), IEEE Transactions on Intelligent Transportation Systems, Vol. 6, Issue 5, pp. 2318 - 2338, 2015.
17. [Pastore, 2010] T.J. Pastore, A.N. Patrikalakis: „Laser Scanners for Autonomous Surface Vessels in Harbor Protection: Analysis and Experimental Results" (Skanery laserowe dla ochrony autonomicznych


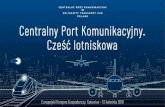

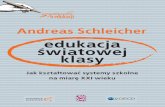


![Plan dlastudent.wzim.sggw.pl/wp-content/uploads/2015/10/Plan... · 2021. 2. 17. · Hurtownie danych (Lab) Krzysztof Karpio [zdalne] Grafika Komputerowa (Lab) Andrzei Sluzek [zdalne]](https://static.fdocuments.pl/doc/165x107/6119dcdecff0f515b32ad7f6/plan-2021-2-17-hurtownie-danych-lab-krzysztof-karpio-zdalne-grafika-komputerowa.jpg)