Wyspecjalizowane roboty mobilne i ich zastosowania z ... babiak - wyspecjalizowane roboty... · I...
19
Wyspecjalizowane roboty mobilne i ich zastosowania z naciskiem na przemysł górniczy przemysł górniczy Bartosz BABIAK Koło Naukowe Mechaników Górników Wydział inżynierii Mechanicznej i Robotyki
-
Upload
nguyennhan -
Category
Documents
-
view
218 -
download
0
Transcript of Wyspecjalizowane roboty mobilne i ich zastosowania z ... babiak - wyspecjalizowane roboty... · I...
Wyspecjalizowane roboty mobilne
i ich zastosowania z naciskiem na
przemysł górniczy przemysł górniczy
Bartosz BABIAK
Koło Naukowe Mechaników Górników
Wydział inżynierii Mechanicznej i Robotyki

Plan prezentacji
� Robot definicja
� Podział robotów
� Pierwsze roboty mobilne
� Pierwsze maszyny kroczące� Pierwsze maszyny kroczące
� Pierwsze roboty do prac podwodnych
� Roboty do prac podwodnych
� Górniczy Mobilny Robot Inspekcyjny GMRI
� Własny prototyp- zarys
� Bibliografia
Robot
Według definicji wprowadzonej w 1979 roku przez (Robotics Industries
Association) robot to:
Robot- słowo pierwszy raz użyte w 1921 przez czeskiego pisarza Karela Čapek’a , w sztuce „Opilek”, oznacza ciężką pracę ,wysiłek, pierwotnie
określało ono człowieka w uproszczonej wersji przeznaczonego do pracy,
obecnie oznacza urządzenie mechaniczne
Association) robot to:
"Programowalny, wielofunkcyjny manipulator zaprojektowany do przenoszenia
materiałów, części, narzędzi lub specjalizowanych urządzeń poprzez różne
programowalne ruchy, w celu realizacji różnorodnych zadań".
Słownik wyrazów obcych [PWN, Warszawa 2003]:
robot – maszyna lub urządzenie techniczne imitujące działanie
(czasem nawet wygląd) człowieka, odznaczające się
określonym stopniem automatyzacji […]
Podział robotów
Ze względu na przeznaczenie [1]:a) Do badań naukowych
b) Co celów szkoleniowych
c) Do celów przemysłowych
d) Do celów badawczych (pod
wodą, w przestrzeni
kosmicznej, na powierzchni
innych planet)
Według kryterium mobilności:a) Stacjonarne
b) Mobilne
(naziemne, portalowe)
innych planet)
Ze względu na generacje [1]:I generacji- głównie roboty przemysłowe
II generacji- roboty wyposażone w system wizyjny
III generacji
IV generacji
Ze względu na przeznaczenie [2]:• bojowe
• interwencyjno-inspekcyjne
• transportowe
• budowlane
• rolnicze
• osobiste i usługowe
• medyczne
• roboty do rozrywki i inne

Pierwsze roboty mobilne
Rys. 2. 1984-Zostaje opracowany PROWLER,
pierwszy z serii mobilnych robotów militarnych [4].Rys. 1. 1930-1940 – powstanie rosyjskich
teletanków, bezprzewodowych , bezzałogowych
czołgów sterowanych radiowo [5].
Rys.3. Robot Scout produkcji PIAP [2]

Pierwsze maszyny kroczące
Rys. 4. 1968, AMS- ciężarówka krocząca
firmy GE , sterowana przez operatora [6].
Rys. 5.Przykład zastosowania w celach
wojskowych [6]
Pierwsze roboty do prac podwodnych
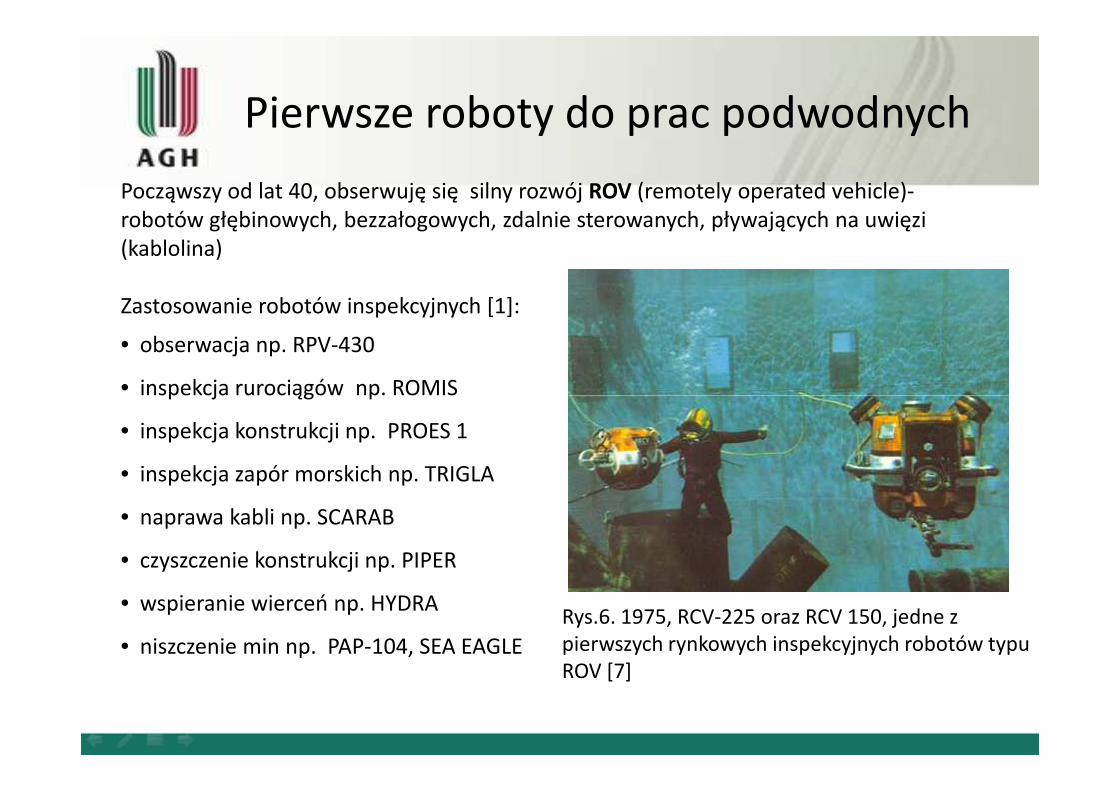
Począwszy od lat 40, obserwuję się silny rozwój ROV (remotely operated vehicle)-
robotów głębinowych, bezzałogowych, zdalnie sterowanych, pływających na uwięzi
(kablolina)
Zastosowanie robotów inspekcyjnych [1]:
• obserwacja np. RPV-430
• inspekcja rurociągów np. ROMIS• inspekcja rurociągów np. ROMIS
• inspekcja konstrukcji np. PROES 1
• inspekcja zapór morskich np. TRIGLA
• naprawa kabli np. SCARAB
• czyszczenie konstrukcji np. PIPER
• wspieranie wierceń np. HYDRA
• niszczenie min np. PAP-104, SEA EAGLE
Rys.6. 1975, RCV-225 oraz RCV 150, jedne z
pierwszych rynkowych inspekcyjnych robotów typu
ROV [7]
Roboty do prac podwodnych
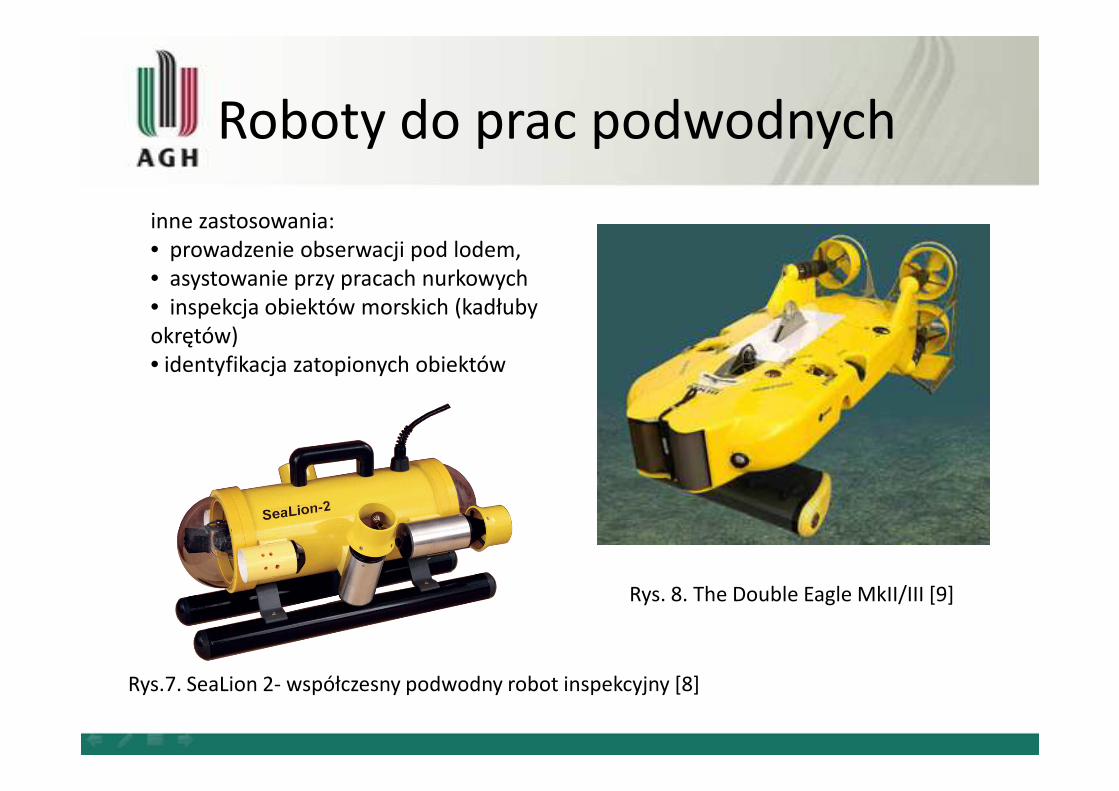
inne zastosowania:
• prowadzenie obserwacji pod lodem,
• asystowanie przy pracach nurkowych
• inspekcja obiektów morskich (kadłuby
okrętów)
• identyfikacja zatopionych obiektów
Rys. 8. The Double Eagle MkII/III [9]
Rys.7. SeaLion 2- współczesny podwodny robot inspekcyjny [8]
Roboty do prac podwodnych
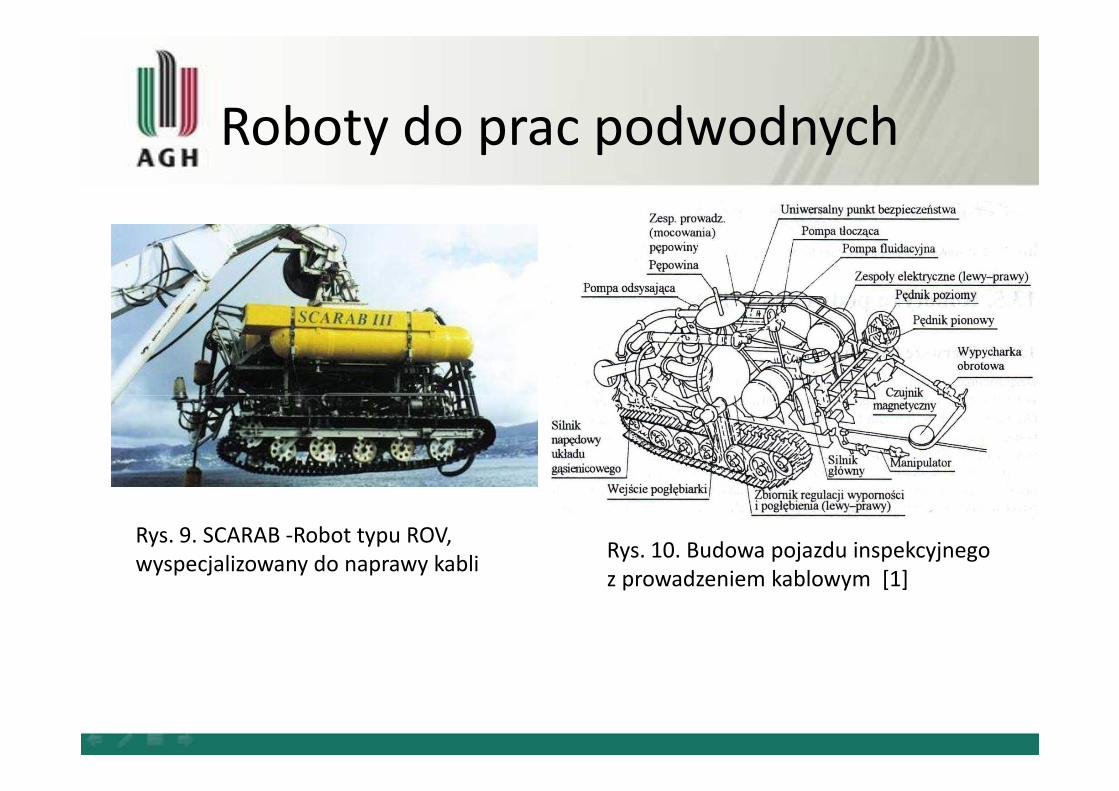
Rys. 9. SCARAB -Robot typu ROV,
wyspecjalizowany do naprawy kabli Rys. 10. Budowa pojazdu inspekcyjnego
z prowadzeniem kablowym [1]

Górniczy Mobilny Robot Inspekcyjny
GMRI Prototyp niekomercyjnego robota mobilnego przeznaczonego do badania
atmosfery i stanu wyrobiska górniczego, w którym występują zbyt niebezpieczne
warunki do wprowadzenia zastępu ratowniczego.
Wykonany został w latach 2008-2011 przez PIAP (Przemysłowy Instytut Automatyki i
Pomiarów PIAP w Warszawie) we współpracy z Instytutem Technik Innowacyjnych
EMAG w Katowicach [11].
Najważniejszymi funkcjami mobilnego robota są:Najważniejszymi funkcjami mobilnego robota są:
� pomiar parametrów atmosfery,
� wizualizacja stanu wyrobiska,
� transmitowanie danych do
� konsoli operatora
Rys. 11. Górniczy Mobilny Robot Inspekcyjny
Górniczy Mobilny Robot Inspekcyjny
GMRI
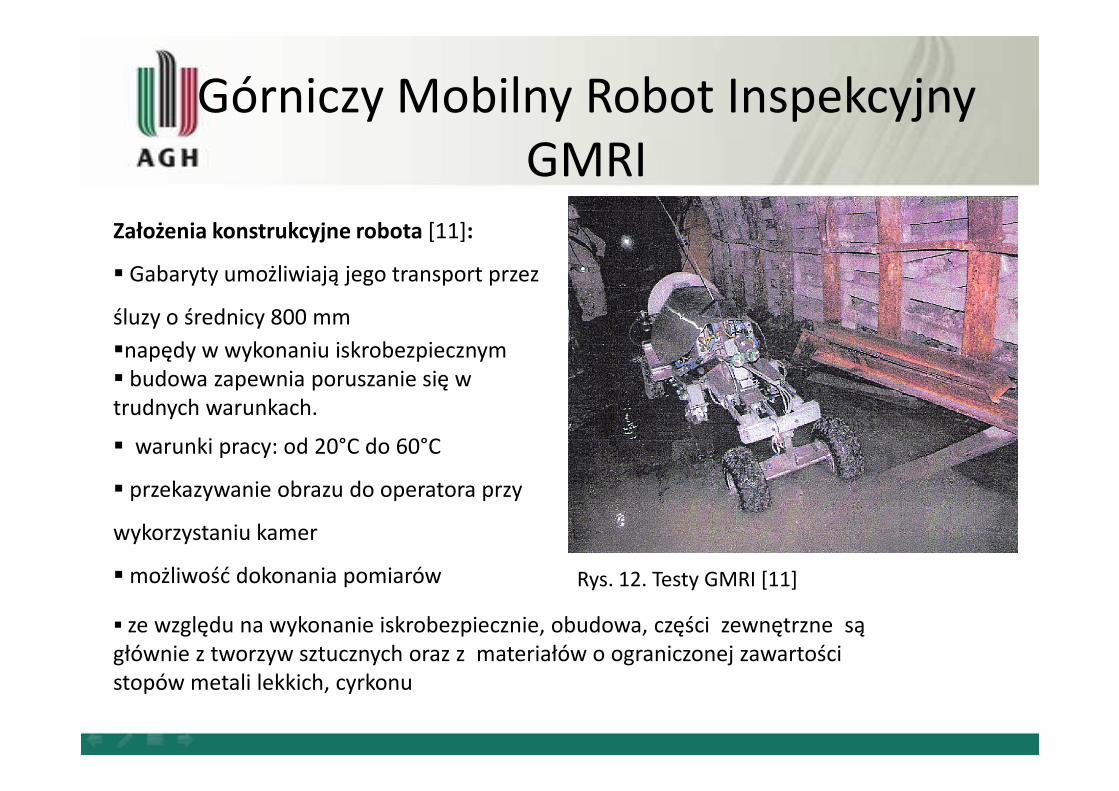
Założenia konstrukcyjne robota [11]:
� Gabaryty umożliwiają jego transport przez
śluzy o średnicy 800 mm
�napędy w wykonaniu iskrobezpiecznym
� budowa zapewnia poruszanie się w
trudnych warunkach.trudnych warunkach.
� warunki pracy: od 20°C do 60°C
� przekazywanie obrazu do operatora przy
wykorzystaniu kamer
� możliwość dokonania pomiarów
� ze względu na wykonanie iskrobezpiecznie, obudowa, części zewnętrzne są
głównie z tworzyw sztucznych oraz z materiałów o ograniczonej zawartości
stopów metali lekkich, cyrkonu
Rys. 12. Testy GMRI [11]
GMRI- budowa
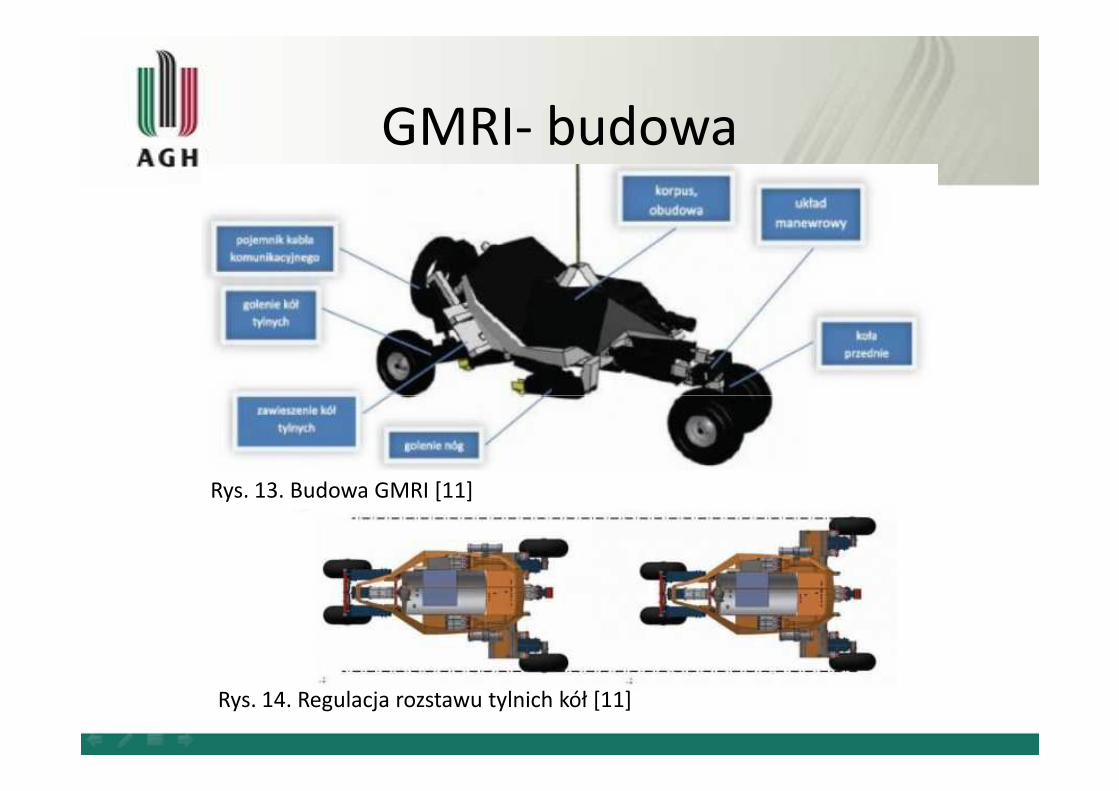
Rys. 14. Regulacja rozstawu tylnich kół [11]
Rys. 13. Budowa GMRI [11]
GMRI- budowa
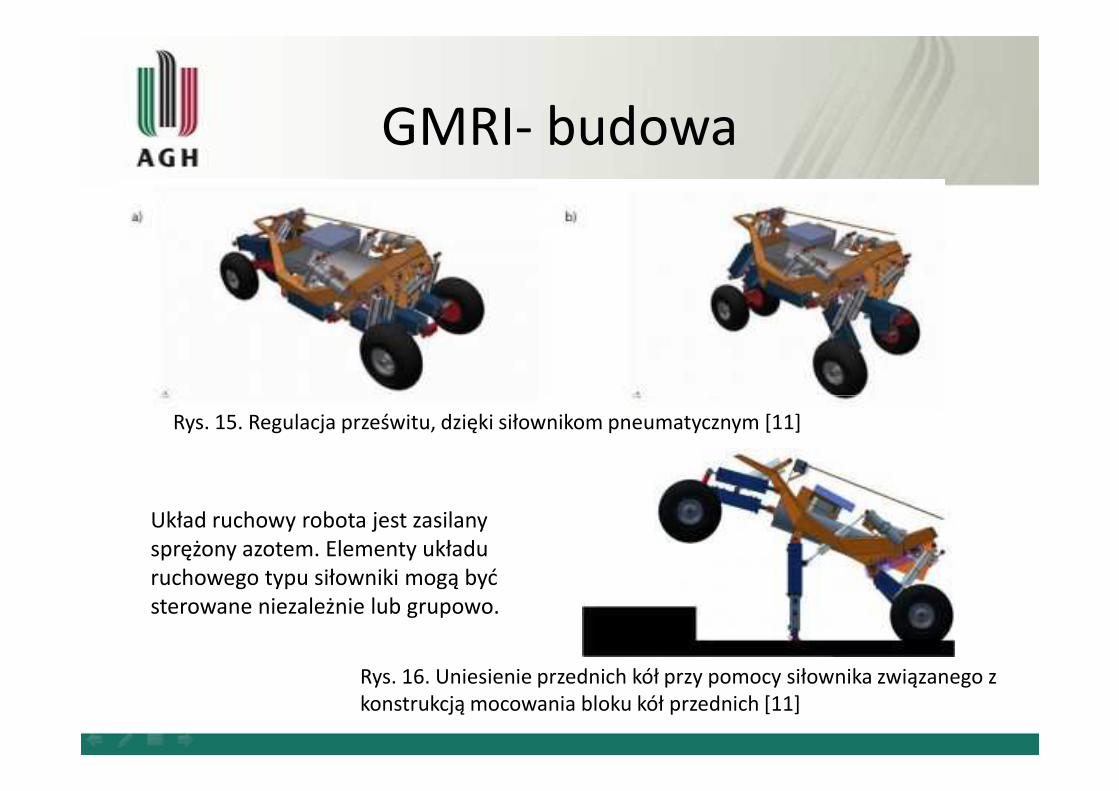
Układ ruchowy robota jest zasilany
sprężony azotem. Elementy układu
ruchowego typu siłowniki mogą być
sterowane niezależnie lub grupowo.
Rys. 15. Regulacja prześwitu, dzięki siłownikom pneumatycznym [11]
Rys. 16. Uniesienie przednich kół przy pomocy siłownika związanego z
konstrukcją mocowania bloku kół przednich [11]
GMRI- pomiary
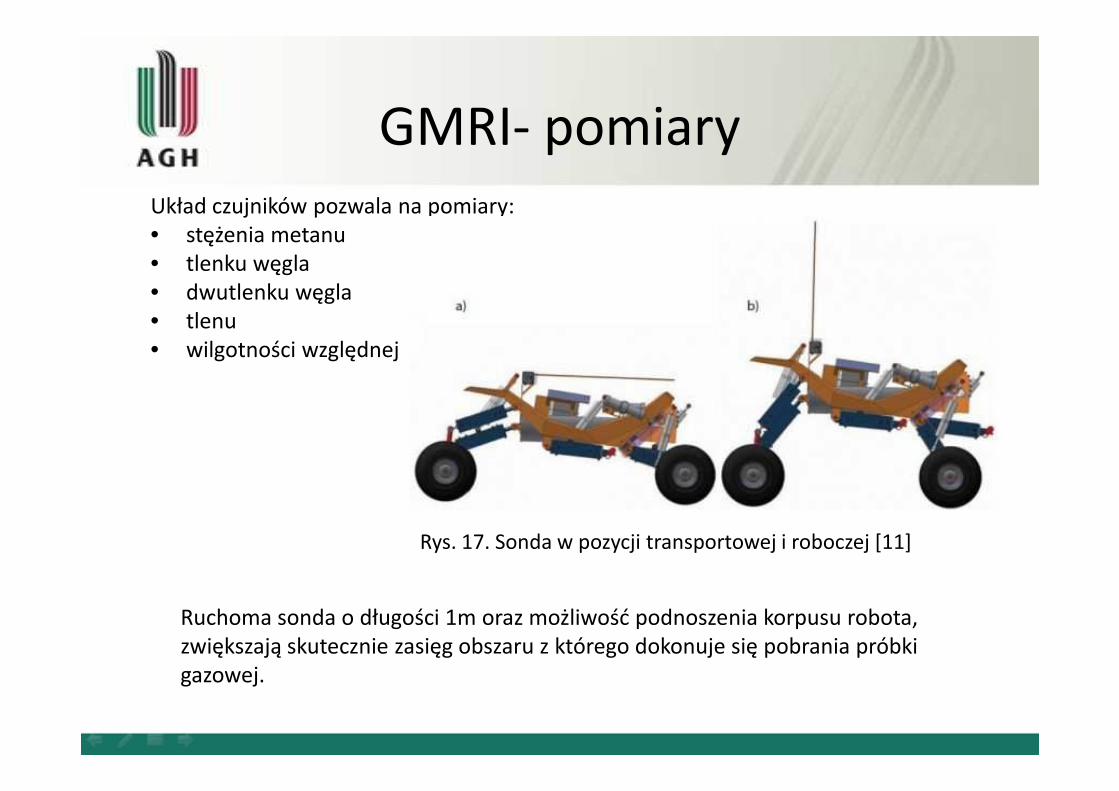
Układ czujników pozwala na pomiary:
• stężenia metanu
• tlenku węgla
• dwutlenku węgla
• tlenu
• wilgotności względnej
Rys. 17. Sonda w pozycji transportowej i roboczej [11]
Ruchoma sonda o długości 1m oraz możliwość podnoszenia korpusu robota,
zwiększają skutecznie zasięg obszaru z którego dokonuje się pobrania próbki
gazowej.
GRMI- dyrektywa ATEX
GRMI jest pierwszym na świecie robotem tego typu, który uzyskał górniczy
certyfikat:
EX I M1 Ex ia IGdzie:
I – oznacza Grupę I urządzeń przeznaczonych do pracy w kopalniach,
M1 – oznacza kategorię urządzeń, które mogą być stosowane zgodnie M1 – oznacza kategorię urządzeń, które mogą być stosowane zgodnie
dyrektywą ATEX i mogą pracować w atmosferze o dowolnej zawartości
metanu,
ia – typ zabezpieczenia, w którym ani iskra, ani temperatura nie mogą
spowodować zapłonu atmosfery wybuchowej (zarówno podczas normalnej
pracy, jak i przy uszkodzeniu).
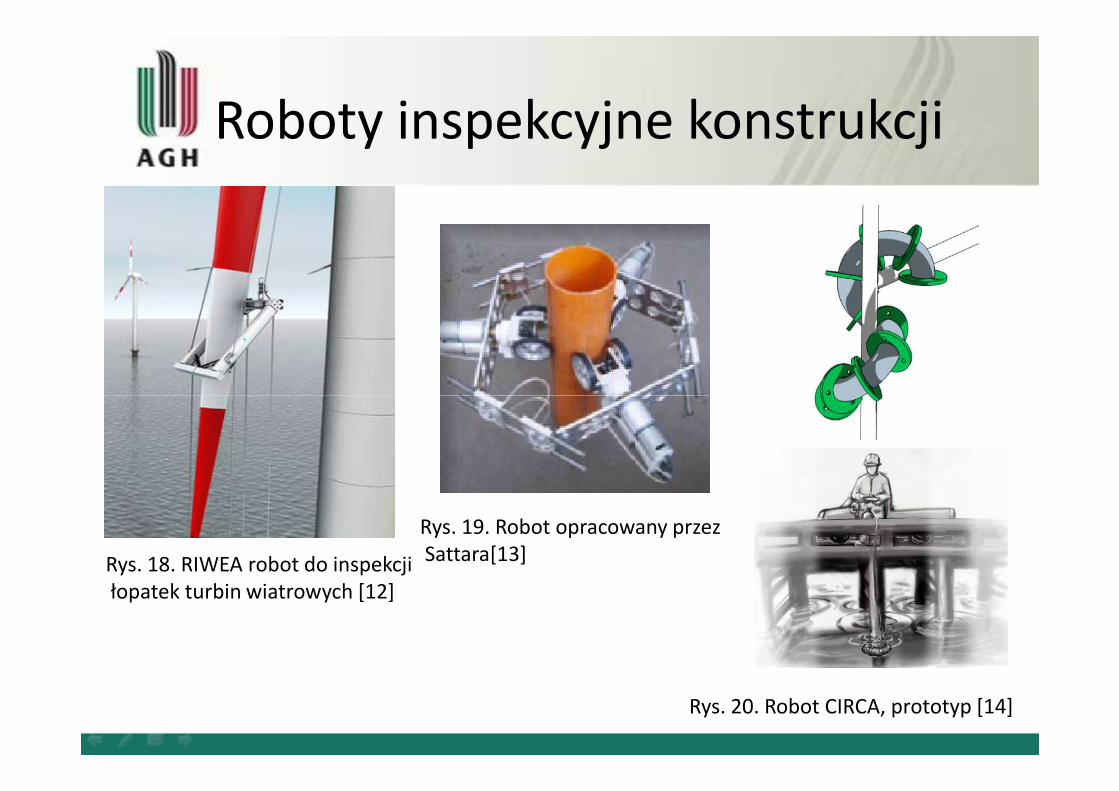
Roboty inspekcyjne konstrukcji
Rys. 18. RIWEA robot do inspekcji
łopatek turbin wiatrowych [12]
Rys. 19. Robot opracowany przez
Sattara[13]
Rys. 20. Robot CIRCA, prototyp [14]
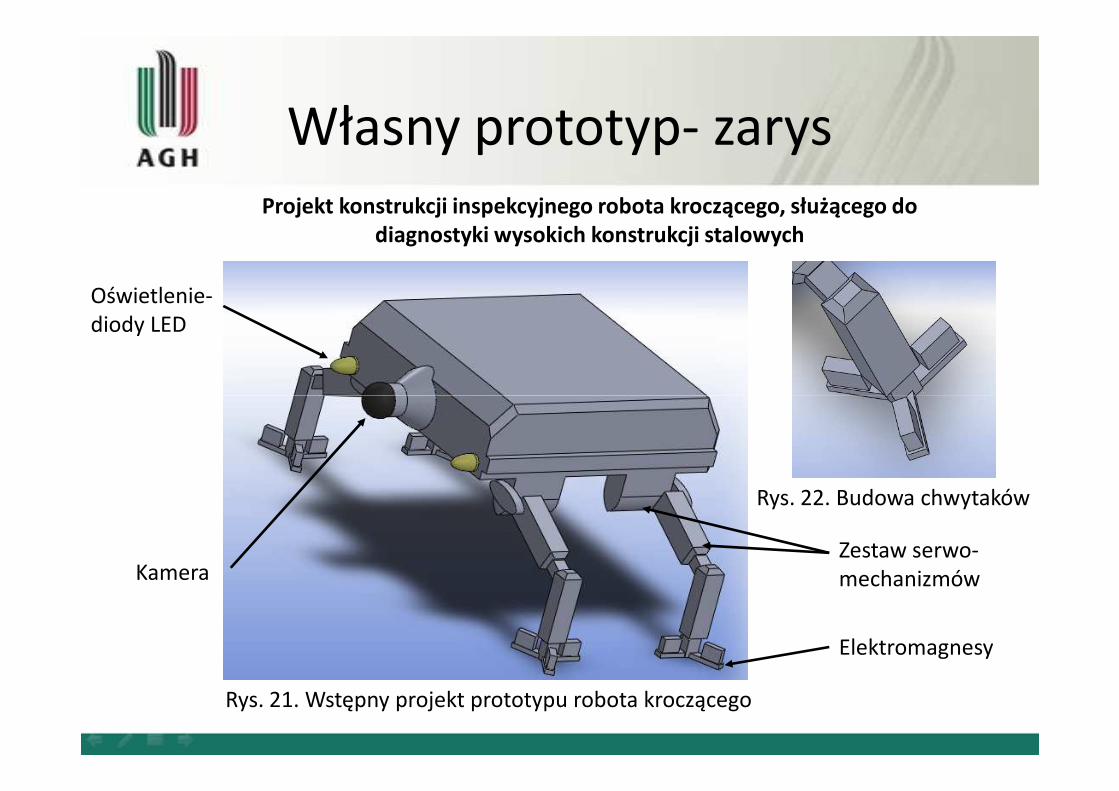
Własny prototyp- zarys
Projekt konstrukcji inspekcyjnego robota kroczącego, służącego do diagnostyki wysokich konstrukcji stalowych
Oświetlenie-
diody LED
KameraZestaw serwo-
mechanizmów
Elektromagnesy
Rys. 22. Budowa chwytaków
Rys. 21. Wstępny projekt prototypu robota kroczącego

Bibliografia[1] Morecki Adam: Podstawy robotyki Teoria i elementy manipulatorów i robotów. WNT, W-wa 1999r.
[2] Trojnacki Maciej: Tendencje rozwoju mobilnych robotów lądowych. Pomiary Automatyka Robotyka 6/2008
[3] Rozwój Robotyki. http://www.robotyka.com/teoria.php/teoria.4, grudzień 2012.
[4] Historia Robotyki lata 1970-1999. http://www.asimo.pl/historia/robotyka_kalendarium_1999.php, grudzień 2012.
[5] Wikipedia: Teletanki, http://pl.wikipedia.org/wiki/Teletank, grudzień 2012.
[6] Carnegie Mellon University’s Robotics Institute: GE walking truck.
www.frc.ri.cmu.edu/~hpm/project.archive/Image.Archive/other.robots, grudzień 2012.
[7] Wernil Robert: Observation Class ROVs Come of Age. Sixth International Symposium on Underwater Technology
UT2009, Wuxi, China, http://www.seatrepid.com/files/UT_PAPER_FINAL-WERNLI.pdf, grudzień 2012.
[8] W Fishers low-cost, high-performance ROVs. http://www.jwfishers.com/rov.htm, grudzień 2012.[8] W Fishers low-cost, high-performance ROVs. http://www.jwfishers.com/rov.htm, grudzień 2012.
[9] The Double Eagle MkII/III, SAAB Group. http://www.saabgroup.com/en/Naval/Underwater-Security/Remotely-
Operated-Vehicles/ROV-Double_Eagle_MkII_III/Features, grudzień 2012.
[10] ROV PILOT, http://www.victoriaelectricalservices.50megs.com/custom.html, grudzień 2012.
[11] Górska-Szkaradek Jolanta, Borkowicz Zbigniew: Pierwszy mobilny robot do zadań specjalnych w kopalniach. Pomiary
Automatyka Robotyka. http://www.par.pl/robotyka/roboty-mobilne/408-pierwszy-mobilny-robot-do-zadan-specjalnych-
w-kopalniach.html, grudzień 2012.
[12] RIWEA: The Rope-Climbing Wind Turbine Inspection Robot. http://cleantechnica.com/2009/01/21/riwea-the-rope-
climbing-wind-turbine-inspection-robot, grudzień 2012.
[13] Sattar T.: Climbing Ring Robot for Inspection of Offshore Wind Turbines. http://robotics.umng.edu.co/8.swf,
grudzień 2012.
[14] Goldman Gabriel: Virginia Tech- The Development of a Novel Climbing Inspection Robot Powered by Compressed
Air. http://www.romela.org/wiki/images/8/87/VT_CAGI_Small.pdf, grudzień 2012
[15] Historia robotyki, podstawowe pojęcia, rodzaje robotów. Politechnika Białostocka,
http://aragorn.pb.bialystok.pl/~teodora/RdI/W/W1.pdf, grudzień 2012.
Wyspecjalizowane roboty mobilne i ich
zastosowania z naciskiem na
przemysł górniczy
Dziękuję za uwagę
Bartosz BABIAK
Koło Naukowe Mechaników Górników
Wydział inżynierii Mechanicznej i Robotyki