WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI … · firmy ABB. Robot ten charakteryzuje się...
10
MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji 287 Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Karol GOSPODARCZYK Wojskowa Akademia Techniczna WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI RUCHU OBIEKTU W BADANIU OPTOELEKTRONICZNYCH GŁOWIC ŚLEDZĄCYCH Streszczenie: W referacie przedstawiono projekt koncepcyjny wykorzystania robota przemysłowego do symulacji ruchu obiektu w badaniu optoelektronicznych głowic śledzących. Autorzy przedstawili problemy związane z prowadzeniem badań laboratoryjnych oraz wskazali zalety wykorzystania nowoczesnych środowisk programistycznych do przeprowadzania wstępnych analiz i tworzenia oprogramowania. USE OF INDUSTRIAL ROBOT FOR SIMULATION OF OBJECT MOTION IN STUDY OF OPTOELECTRONIC HEADS Abstract: This paper presents the conceptual design of an industrial robot used to simulate the movement of the object in the study of optoelectronic heads. The authors present the problems associated with conducting laboratory tests and pointed out the advantages of using modern programming environment to conduct preliminary analysis and software development. Słowa kluczowe: robot przemysłowy, głowica optoelektroniczna, symulacje komputerowe Keywords: industrial robots, optoelectronics head, computer simulations 1. WPROWADZENIE Prowadzone przez naukowców prace badawcze pociągają za sobą konieczność prowadzenia badań laboratoryjnych i terenowych. Pełne sprawdzenie poprawności funkcjonowania tworzonych modeli czy prototypów wiąże się z prowadzeniem badań w warunkach rzeczywistych. Jednak zanim to nastąpi, realizowanych jest wiele symulacji komputerowych oraz badań laboratoryjnych, których zadaniem jest przygotowanie do końcowych testów terenowych. W przypadku tworzenia nowych aplikacji powstają programy komputerowe, które umożliwiają przetestowanie tworzonych aplikacji. Przy tworzeniu nowych konstrukcji budowane są stanowiska laboratoryjne pozwalające na sprawdzenie najważniejszych parametrów urządzeń już na etapie badań laboratoryjnych. Obecnie w związku z projektami badawczymi zawierającymi w sobie elementy mechatroniczne, a więc m.in.: mechaniczne, elektroniczne i informatyczne, powstaje problem opracowywania rozbudowanych stanowisk laboratoryjnych. Na stanowiskach tych w pierwszej kolejności sprawdzane jest poprawne
Transcript of WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI … · firmy ABB. Robot ten charakteryzuje się...
MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
287
Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Karol GOSPODARCZYK Wojskowa Akademia Techniczna
WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI RUCHU OBIEKTU W BADANIU
OPTOELEKTRONICZNYCH GŁOWIC ŚLEDZĄCYCH Streszczenie: W referacie przedstawiono projekt koncepcyjny wykorzystania robota przemysłowego do symulacji ruchu obiektu w badaniu optoelektronicznych głowic śledzących. Autorzy przedstawili problemy związane z prowadzeniem badań laboratoryjnych oraz wskazali zalety wykorzystania nowoczesnych środowisk programistycznych do przeprowadzania wstępnych analiz i tworzenia oprogramowania.
USE OF INDUSTRIAL ROBOT FOR SIMULATION OF OBJECT
MOTION IN STUDY OF OPTOELECTRONIC HEADS
Abstract: This paper presents the conceptual design of an industrial robot used to simulate the movement of the object in the study of optoelectronic heads. The authors present the problems associated with conducting laboratory tests and pointed out the advantages of using modern programming environment to conduct preliminary analysis and software development. Słowa kluczowe: robot przemysłowy, głowica optoelektroniczna, symulacje komputerowe Keywords: industrial robots, optoelectronics head, computer simulations
1. WPROWADZENIE
Prowadzone przez naukowców prace badawcze pociągają za sobą konieczność prowadzenia badań laboratoryjnych i terenowych. Pełne sprawdzenie poprawności funkcjonowania tworzonych modeli czy prototypów wiąże się z prowadzeniem badań w warunkach rzeczywistych. Jednak zanim to nastąpi, realizowanych jest wiele symulacji komputerowych oraz badań laboratoryjnych, których zadaniem jest przygotowanie do końcowych testów terenowych. W przypadku tworzenia nowych aplikacji powstają programy komputerowe, które umożliwiają przetestowanie tworzonych aplikacji. Przy tworzeniu nowych konstrukcji budowane są stanowiska laboratoryjne pozwalające na sprawdzenie najważniejszych parametrów urządzeń już na etapie badań laboratoryjnych. Obecnie w związku z projektami badawczymi zawierającymi w sobie elementy mechatroniczne, a więc m.in.: mechaniczne, elektroniczne i informatyczne, powstaje problem opracowywania rozbudowanych stanowisk laboratoryjnych. Na stanowiskach tych w pierwszej kolejności sprawdzane jest poprawne

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
288
działanie poszczególnych komponentów tworzonych urządzeń, a następnie całego urządzenia. Wysokie wymagania gestorów sprawiają, iż coraz większe nakłady ponoszone są na wyspecjalizowane stanowiska laboratoryjne, dzięki którym można dokładnie zweryfikować parametry statyczne i dynamiczne. Rzetelne podejście i wykonanie badań laboratoryjnych gwarantuje bezproblemowe i szybkie przejście przez drogie badania terenowe, które tak właściwie powinny tylko potwierdzić oczekiwane rezultaty.
Ponieważ dotacje finansowe nie zawsze w pełni zaspokajają potrzeby finansowe zespołów badawczych, często stają one przed dylematem ewentualnego zakupu drogich wyspecjalizowanych stanowisk laboratoryjnych lub modernizacji istniejącej bazy poprzez dostosowanie posiadanego sprzętu do konkretnych potrzeb.
Należy tutaj pamiętać, że rozbudowa bazy laboratoryjnej pozwala na rozwój zespołu badawczego, a co za tym idzie – podejmowanie się złożonych problemów badawczych z gwarancją ich pozytywnego zakończenia. W niniejszym artykule przedstawiono możliwość wykorzystania robota przemysłowego do symulacji obiektu powietrznego przy badaniu optoelektronicznych głowic śledzących. Przy czym do opracowania stanowiska posłużono się środowiskiem do modelowania zrobotyzowanych komór produkcyjnych RobotStudio firmy ABB [1, 5].
2. ROBOT IRB 120 ORAZ KONCEPCJA JEGO WYKORZYSTANIA
Pomimo iż roboty przemysłowe są produkowane głównie z uwagi na zastosowanie ich w przemyśle, znajdują one coraz szersze zastosowanie w innych dziedzinach (m.in.: nauka, rozrywka). Roboty przemysłowe posiadają dużo zalet, które pozwalają na szybkie ich wykorzystanie, zwłaszcza na wstępnym etapie badań laboratoryjnych. Z punktu widzenia badania głowicy optoelektronicznej do zalet można zaliczyć: dużą elastyczność ruchów (symulacja dynamicznie zmieniających się scenariuszy), pełną programowalność trajektorii ruchów, możliwość wgrywania pomiarów wykonanych na rzeczywistych obiektach
i wygenerowania trajektorii ruchów, generowanie ruchów z dużą dokładnością (poniżej 1 mm) [3]. Roboty te jednak posiadają wady, które mogą uniemożliwić przeprowadzenie wszystkich symulacji: ograniczone prędkości i przyspieszenia w zależności od typu robota (brak możliwości
symulowania ruchów charakteryzujących się dużymi częstotliwościami zmian). Głównym celem budowy stanowiska przedstawionego w niniejszym artykule jest przeprowadzanie wstępnych badań sensorów (zwłaszcza optoelektronicznych) oraz napędów głowicy śledzącej w określonym zakresie. W związku z tym, iż zakres ruchów robota będzie ograniczony, odprawowanie większych kątów głowicy powinno być zrealizowane poprzez zamocowanie głowicy na nosicielu (programowalnej platformie). Podejście takie pozwoli na przeprowadzenie badań statycznych i dynamicznych głowicy.
Zaproponowany robot powinien posiadać udźwig do 3 kg, co pozwoli na zamontowanie na jego kołnierzu ciała doskonale czarnego imitującego obiekt powietrzny. W związku z tym, że jego głównym zadaniem będzie odtwarzanie zaplanowanych trajektorii ruchu celu, założono, że robot powinien posiadać 6 stopni swobody (duża swoboda manipulowania obiektami).

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
289
Po analizie do realizacji procesu symulacji ruchu imitatora celu wybrano robota IRB 120 firmy ABB. Robot ten charakteryzuje się małą masą własną (ok. 25 kg), umożliwiającą powieszenie robota na ścianie (jeżeli zajdzie taka potrzeba), w celu uzyskania możliwie dużej powierzchni przekroju poziomego przestrzeni roboczej [1].
Rys. 1. Ogólny widok przestrzeni roboczej robota IRB 120 firm ABB [4]
3. STANOWISKO BADAWCZE DO IMITACJI CELU POWIETRZNEGO
Podczas prowadzenia prac badawczo-rozwojowych opracowano koncepcję stanowiska laboratoryjnego umożliwiającego badanie wybranych parametrów optoelektronicznych głowic śledzących [2]. Wykorzystując środowiska programistyczne do projektowania zrobotyzowanych komór produkcyjnych, zamodelowano stanowisko. Następnie stanowisko to ukompletowano i uruchomiono.
MODEL WIRTUALNEGO STANOWISKA BADAWCZEGO W ŚRODOWISKU
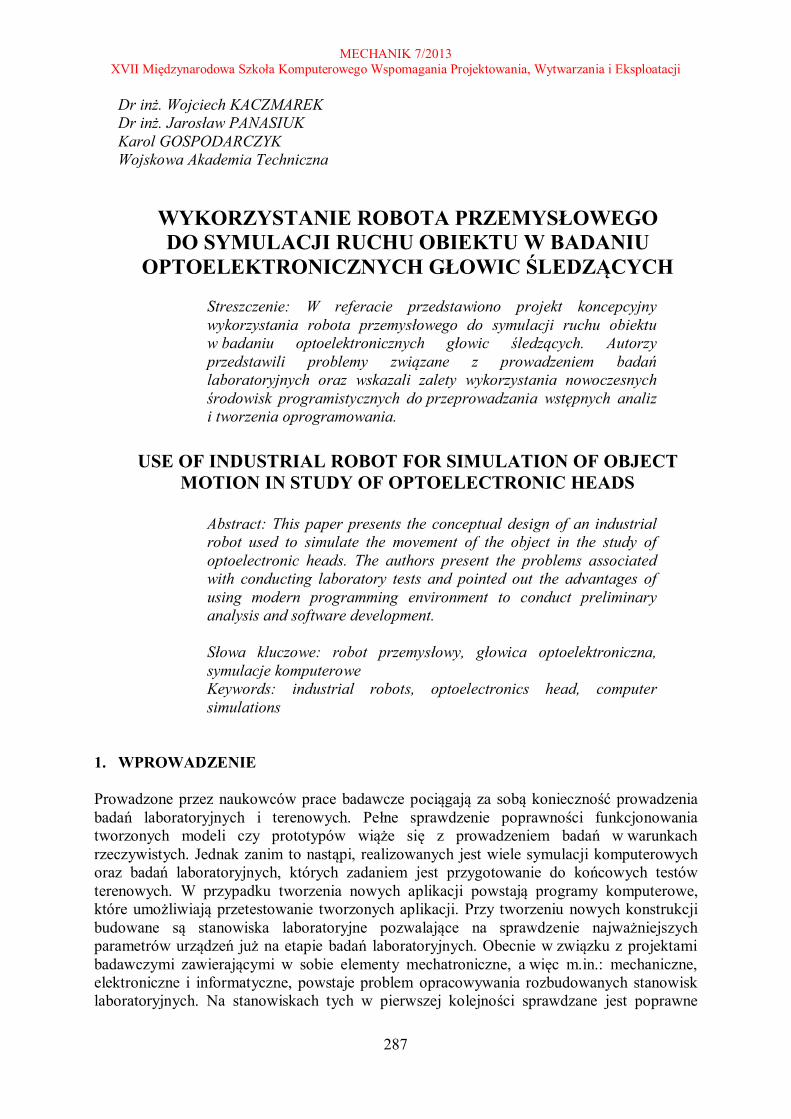
Model wirtualnego stanowiska badawczego został opracowany w środowisku RobotStudio 5.14 (rys. 2). Środowisko to jest oprogramowaniem symulacyjnym, wykorzystującym wirtualny kontroler robota. Pozwala ono na symulację ruchu robota lub wykonalności zadań bez konieczności uruchamiania rzeczywistych elementów stanowiska.
MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
290
Rys. 2. Widok wirtualnego stanowiska badawczego: 1 – stanowisko do imitacji obiektu powietrznego, 2 – szafa sterownicza dla wieloosiowej platformy nosiciela głowicy, 3 – wieloosiowa platforma (nosiciel głowicy śledzącej), 4 –
optoelektroniczna głowica śledząca, 5 – stanowisko operatora Zaprojektowanie stanowiska wiązało się z przejściem przez kilka etapów projektowania. Przejście to jest ściśle związane z komponentami, w jakie wyposażono środowisko. Środowisko RobotStudio jest podzielone na kilka komponentów [4]: Home – komponent zawierający narzędzia do podstawowych czynności, takich jak
dołączanie nowych systemów, bibliotek urządzeń, importowanie geometrii, tworzenie układów współrzędnych, tworzenie narzędzi, punktów docelowych ruchów, ścieżek, dodawanie do ścieżek instrukcji ruchów i akcji.
Modeling – komponent pozwalający na tworzenie oraz edycję trójwymiarowych brył, powierzchni, krzywych, tworzenie mechanizmów oraz narzędzi.
Simulation – komponent odpowiadający za kontrolę oraz konfigurację symulacji, umożliwiającą między innymi nagrywanie, odtwarzanie symulacji, a także tworzenie powiadomień o kolizji między obiektami, oraz zdarzeń, takich jak np. ruch obiektów.
Offline – komponent dający kontrolę nad wirtualnym kontrolerem IRC5, pozwalający na włączenie/wyłączenie kontrolera oraz jego restart, pozwalający na dostęp do poszczególnych zadań i programowania off-line stanowiska w języku RAPID. Komponent pozwala na tworzenie nowych, edytowanie lub usuwanie istniejących systemów robota za pomocą narzędzia „System Builder”.
Online – komponent dający dostęp i kontrolę nad rzeczywistym kontrolerem IRC5 (jeśli jest podłączony do komputera PC). Komponent pozwala między innymi na podglądanie zmiennych systemowych, kart wejść oraz wyjść kontrolera, programowanie i konfigurację on-line, a także przesyłanie plików pomiędzy kontrolerem a komputerem PC.
Add-Ins – komponent zawierający narzędzie „Visual Studio Tools for Applications”, które umożliwia tworzenie aplikacji wspomagających w języku Visual Basic lub C#.

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
291
W niniejszym artykule skupiono się na przedstawieniu stanowiska do imitacji obiektu powietrznego (rys. 3).
Rys. 3. Widok wirtualnego stanowiska do imitacji celu powietrznego
1 – eran, 2 – ciało doskonale czarne, 3 – robot IRB 120 firmy ABB, 4 – kontroler IRC5 robota IRB120, 5 – FlexPendant robota IRB 120 firmy ABB
OPRACOWANIE PROGRAMÓW STERUJĄCYCH Optoelektroniczna głowica śledząca jest wyposażona w video tracker Adept 104 angielskiej firmy. Aby możliwe było zweryfikowanie poprawności doboru nastaw tego urządzenia, zdecydowano się na opracowanie programów w języku RAPID umożliwiającym ruch imitatora celu po następujących trajektoriach ruchu:
ruch po elipsie, ruch po kole, ruch po trójkącie.
Trajektorie te zostały sparametryzowane pod kątem prędkości, kształtu, a także liczby powtórzeń. Na rysunku 4 przedstawiono panel operatora z okienkową aplikacją opracowaną przy wykorzystaniu programu ScreeMaker.

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
292
Rys. 4. Przykładowy widok dedykowanego panelu operatorskiego do parametryzacji ruchu po elipsie
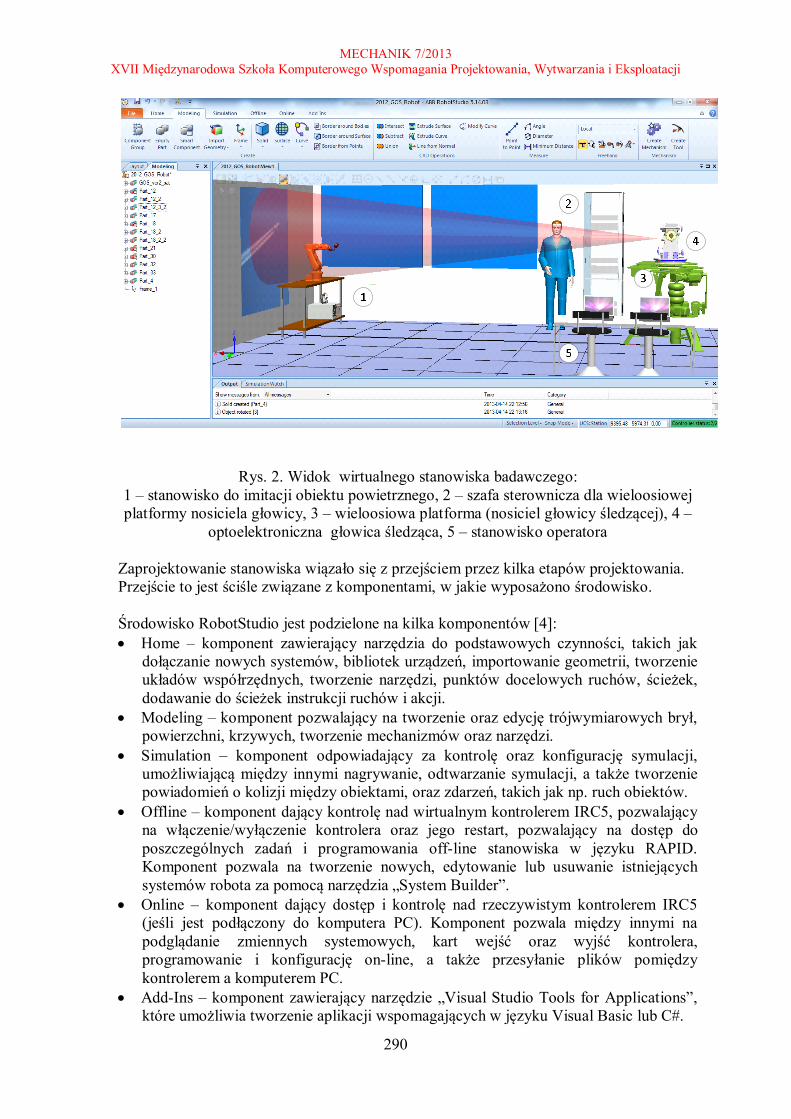
Przykład sparametryzowanego programu napisanego w języku RAPID dla trajektorii elipsy można przedstawić następująco (rys. 5): PROC elipsa() SingArea \Off; ConfL \Off; MoveL elipsa_pocz, speed,z30,cd_chwyt\WObj:=plaszcz; WHILE i<powtorzenia DO i:=i+1; MoveL Offs(elipsa_pocz, -er, (0.5*ed), 0), speed,z30, cd_chwyt\WObj:=plaszcz; MoveL Offs(elipsa_pocz, -er, -(0.5*ed), 0),speed,z30, cd_chwyt\WObj:=plaszcz; MoveC Offs(elipsa_pocz, 0, -(er+0.5*ed),0),Offs(elipsa_pocz, er, - 0.5*ed,0),speed,z30,cd_chwyt\WObj:=plaszcz; MoveL Offs(elipsa_pocz, er, (0.5*ed), 0),speed,z30, cd_chwyt\WObj:=plaszcz; MoveC Offs(elipsa_pocz, 0, (er+0.5*ed), 0), Offs(elipsa_pocz, -er, (0.5*ed), 0),speed,z30,cd_chwyt\WObj:=plaszcz; ENDWHILE MoveL elipsa_pocz, speed,fine,cd_chwyt\WObj:=plaszcz; i:=0; ENDPROC
MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
293
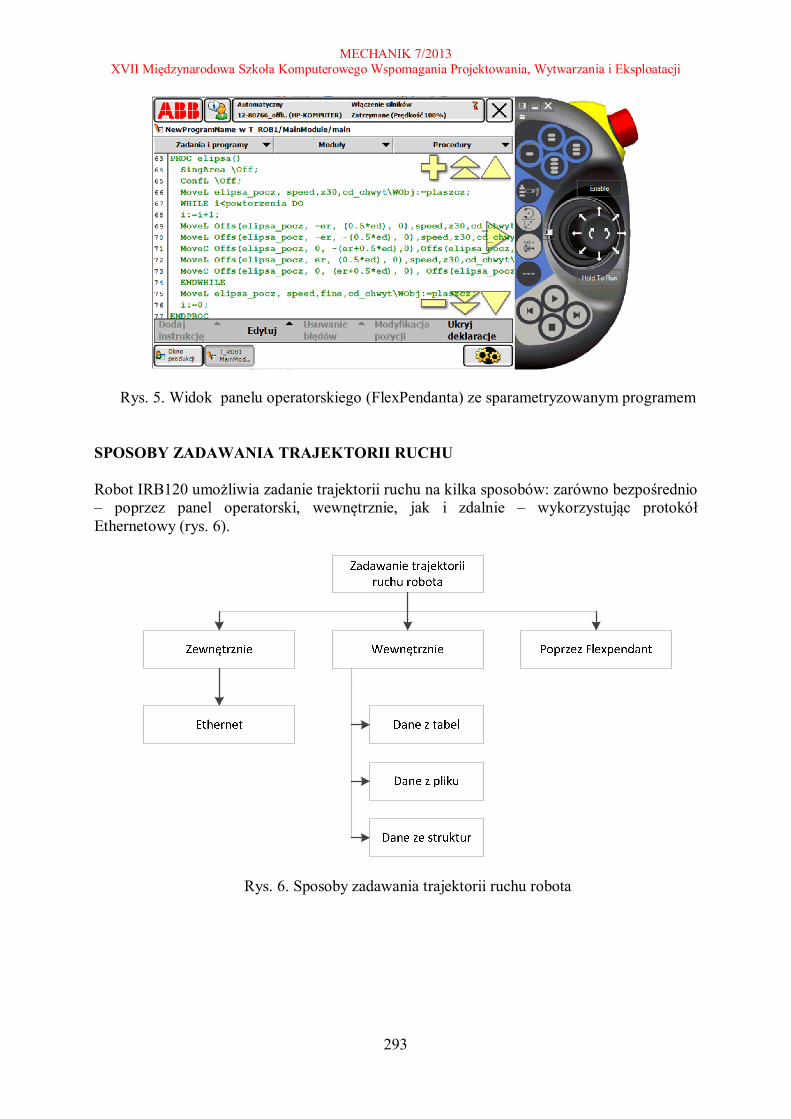
Rys. 5. Widok panelu operatorskiego (FlexPendanta) ze sparametryzowanym programem SPOSOBY ZADAWANIA TRAJEKTORII RUCHU Robot IRB120 umożliwia zadanie trajektorii ruchu na kilka sposobów: zarówno bezpośrednio – poprzez panel operatorski, wewnętrznie, jak i zdalnie – wykorzystując protokół Ethernetowy (rys. 6).
Rys. 6. Sposoby zadawania trajektorii ruchu robota

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
294
Istnieje kilka sposobów wprowadzania danych do kontrolera robota: Zewnętrznie przy użyciu protokołu TCP/IP. Oprogramowanie uruchomione na
komputerze PC łączy się z kontrolerem na zasadzie gniazd tzw. socketów. Po ustaleniu połączenia użytkownik wprowadza w oknie dialogowym parametry ruchu, takie jak: prędkość, kształt bądź liczbę cykli. Następnie informacje przesyłane są do kontrolera robota, który je przetwarza i wykonuje ruch. Zarówno po ukończeniu, jak i w czasie trwania pracy wysyłane są komunikaty kontrolne.
Pośrednio z wykorzystaniem panelu operatorskiego (FlexPendanta). Program jest uruchomiony w trybie automatycznym i czeka na wprowadzenie danych. Aby wykonać ruch, operator musi wybrać trajektorię, a następnie podać parametry ruchu, po czym następuje wykonanie polecenia. Przy czym dane mogą być pozyskiwane w różny sposób (np.: z pliku, z tabel, ze struktur).
Bezpośrednio, przy użyciu panelu operatorskiego. Program z wcześniej zadeklarowanymi parametrami trajektorii ruchu jest wprowadzany do pamięci kontrolera, a następnie uruchamiany w trybie automatycznym.
Główne funkcje programu w języku RAPID umożliwiającego zdalne łączenie się z kontrolerem przy użyciu protokołu TCP/IP przedstawiono poniżej: PROC Socket() SocketCreate server_socket; SocketBind server_socket, "192.168.1.4", 1000; SocketListen server_socket; SocketAccept server_socket, client_socket \ClientAddress:=client_ip; POCZ: MoveL Offs(elipsa_pocz, 0, 0, 0),speed,z30,cd_chwyt\WObj:=plaszcz; SocketReceive client_socket \Str := receive_string; ok:=StrToVal (receive_string, x); { Instrukcje sterujące ruchem robota } GOTO POCZ; ENDIF SocketClose server_socket; SocketClose client_socket; ENDPROC

MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
295
STANOWISKO BADAWCZE DO IMITACJI CELU POWIETRZNEGO
Stanowisko laboratoryjne ukompletowano i uruchomiono (rys. 7). Zainstalowany na stanowisku robot IRB 120 składa się z manipulatora, kontrolera IRC 5 Compact oraz systemu RobotWare 1.14 [7, 8].
Rys. 7. Ogólny widok stanowiska do imitacji celu powietrznego (fot. W. Kaczmarek)
Testowanie poprawności funkcjonowania stanowiska przeprowadzono z wykorzystaniem komputera. Komputer został podłączony do kontrolera robota za pomocą sieci Ethernet (rys. 8). Na komputerze uruchomiono środowisko RobotStudio w trybie on-line [5], dzięki czemu możliwe było pełne przejęcie kontroli nad robotem. Przeprowadzone testy potwierdziły poprawność funkcjonowania opracowanego oprogramowania.
Ethernet
IRC5Compact
RobotStudio on-line
Rys. 8. Schemat podłączenia komputera do kontrolera IRC5
MECHANIK 7/2013 XVII Międzynarodowa Szkoła Komputerowego Wspomagania Projektowania, Wytwarzania i Eksploatacji
296
4. PODSUMOWANIE
W artykule przedstawiono koncepcję wykorzystania robota przemysłowego do symulacji ruchu imitatora obiektu powietrznego. Do opracowania koncepcji stanowiska wykorzystano środowisko RobotStudio firmy ABB. Niewątpliwie ważną zaletą jego wykorzystania jest odzwierciedlenie w 100% pracy rzeczywistego robota. Umożliwiło to z dużą dokładnością przeprowadzenie wstępnych badań symulacyjnych oraz wskazanie ograniczeń projektowanego stanowiska badawczego.
Podczas prowadzenia badań, z backup’u rzeczywistego robota utworzono system robota w środowisku RobotStudio. Następnie w trybie off-line zamodelowano stanowisko. Po opracowaniu i przetestowaniu programów sterujących zaimplementowano je do urządzenia rzeczywistego. Opracowane programy sterujące przygotowano m.in.: pod kątem badania video trackera Adept 104, który jest składowym elementem nowo opracowywanej optoelektronicznej głowicy śledzącej. Uruchomione stanowisko badawcze pozwoli na dobranie parametrów video trackera zgodnie z jego przeznaczeniem, tj. do śledzenia obiektów powietrznych. Drugim ważnym celem budowy stanowiska jest wykorzystanie go podczas sprawdzenia poprawności doboru nastaw regulatorów sterujących napędami azymutu i elewacji głowicy. Podczas doboru tych parametrów szczególną uwagę należy zwrócić na śledzenie obiektów z minimalnymi prędkościami śledzenia oraz z maksymalnymi prędkościami wynikającymi z wstępnych założeń taktyczno-technicznych.
Śledząc rozwój robotyki oraz coraz bardziej różnorodne ich zastosowania (niemal we wszystkich dziedzinach przemysłu i nauki), celowe jest prowadzenie prac nad szerszym wykorzystaniem robotów przemysłowych w badaniach naukowych. Obecnie w laboratoriach Katedry Mechatroniki Wojskowej Akademii Technicznej znajduje się 5 robotów przemysłowych, przy czym w najbliższym okresie ich liczba zostanie zwiększona o nowe jednostki w związku z budową nowego laboratorium robotyki.
Praca naukowa finansowana ze środków na naukę w latach 2010-2012 jako projekt rozwojowy.
LITERATURA [1] Kaczmarek W., Panasiuk J.: Analiza porównawcza wybranych środowisk do
programowania robotów przemysłowych w trybie off-line, Mechanik, nr 7/2011.
[2] Panasiuk J.: Koncepcja zrobotyzowanego stanowiska do badania głowicy śledzącej, Sprawozdanie etapowe z realizacji projektu badawczo-rozwojowego OR00 0137 12, Warszawa, 2012.
[3] Tomaszewski K.: Roboty przemysłowe. Projektowanie układów mechanicznych, WNT, Warszawa, 1993.
[4] Product specification IRB 120 materiały firmy ABB.
[5] User guide for RobotStudio materiały firmy ABB. [6] User gudie for Rapid materiały firmy ABB.
[7] User gudie for RobotWare materiały firmy ABB. [8] User guide for IRC5 materiały firmy ABB.