Wydział Fizyki i Informatyki Stosowanej · Wydział Fizyki i Informatyki Stosowanej Praca...
45
Wydzial Fizyki i Informatyki Stosowanej Praca magisterska Michal Stalmach kierunek studiów: Informatyka Stosowana specjalność: Informatyka w nauce i technice Zastosowanie metody elementów skończonych do opisu stanów wlasnych dwuwymiarowego oscylatora harmonicznego Opiekun: dr hab. inż. Bartlomiej Szafran Kraków, styczeń 2009
Transcript of Wydział Fizyki i Informatyki Stosowanej · Wydział Fizyki i Informatyki Stosowanej Praca...
Wydział Fizyki i Informatyki Stosowanej
Praca magisterska
Michał Stalmach
kierunek studiów: Informatyka Stosowana
specjalność: Informatyka w nauce i technice
Zastosowanie metody elementówskończonych do opisu stanów własnych
dwuwymiarowego oscylatoraharmonicznego
Opiekun: dr hab. inż. Bartłomiej Szafran
Kraków, styczeń 2009

Oświadczam, świadomy odpowiedzialności karnej za poświadczenie nieprawdy, że niniejsząpracę dyplomową wykonałem(-am) osobiście i samodzielnie i nie korzystałem ze źródeł innychniż wymienione w pracy.
2
Kraków, styczeń 2009
Tematyka pracy magisterskiej i praktyki dyplomowej Michała Stalmacha,studenta V roku studiów kierunku informatyka stosowana, specjalności
informatyka w nauce i technice
Temat pracy magisterskiej: Zastosowanie metody elementów skończonych do opisustanów własnych dwuwymiarowego oscylatora harmonicznego
Opiekun pracy: dr hab. inż. Bartłomiej SzafranRecenzenci pracy: ..................................................
Miejsce praktyki dyplomowej: WFiIS AGH, Kraków
Program pracy magisterskiej i praktyki dyplomowej
1. Omówienie realizacji pracy magisterskiej z opiekunem.
2. Zebranie i opracowanie literatury dotyczącej tematu pracy.
3. Praktyka dyplomowa:
• zapoznanie się z ideą,
• przygotwanie oprogramowania,
• dyskusja i analiza wyników,
• sporządzenie sprawozdania z praktyki.
4. Kontynuacja obliczeń związanych z tematem pracy magisterskiej.
5. Zebranie i opracowanie wyników obliczeń.
6. Analiza wyników obliczeń numerycznych, ich omówienie i zatwierdzenie przez opiekuna.
7. Opracowanie redakcyjne pracy.
Termin oddania w dziekanacie: ...................
.............................................................. ..............................................................(podpis kierownika katedry) (podpis opiekuna)
3
Merytoryczna ocena pracy przez opiekuna:
Pan Michał Stalmach zbadał działanie metody elementów skończonych w kwantowym pro-blemie oscylatora harmonicznego. W pracy zastosowano bazę funkcji Lagrange’a. W częścidotyczącej oscylatora dwuwymiarowego przebadane zostały elementy kwadratowe, czworokąt-ne oraz trójkątne. Omówiono obszernie problem optymalizacji siatki dla stanu podstawowegooraz dla stanów wzbudzonych. Optymalizacja siatki wykorzystuje wariacyjny charakter metody.Szczegóły rachunku zostały dokładnie opisane, a wyniki przedstawione w sposób klarowny. PanMichał Stalmach wykazał się dużą inwencją i samodzielnością w doborze strategii optymalizacjisiatki. Omówione wyniki i metody mogą być użyteczne dla badań nad problemami z bardziejzłożonym potencjałem uwięzienia.
Końcowa ocena pracy przez opiekuna: bradzo dobry (5.0)
Data: .................................. Podpis: ..................................
Merytoryczna ocena pracy przez recenzenta:
Autor w swojej pracy przebadał metodę elementów skończonych w zastosowaniu do rozwią-zywania niezależnego od czasu równania Schroedingera w układach jedno i dwuwymiarowych.Przebadany został wpływ wyboru elementów skończonych (czworokątne i trójkątne) oraz funk-cji kształtu na dokładność uzyskiwanych rozwiązań. Przeprowadzona została optymalizacjapudła obliczeniowego. Przebadano również możliwość zagęszczania siatki w obszarach najwięk-szej zmienności funkcji falowych. W sumie praca zawiera bardzo dużo materiału obliczeniowegotestującego skomplikowaną ale ważną i w niektórych zastosowaniach niezastąpioną metodę ob-liczeniową. Praca napisana jest ze zrozumieniem problemu, ilustrowana dużą ilością tabel i ko-lorowych wykresów. Uzyskane wyniki mogą być pomocne każdemu kto jest zmuszony posłużyćsię w obliczeniach numerycznych metodą elementów skończonych.
Końcowa ocena pracy przez recenzenta: celujący (6.0)
Data: .................................. Podpis: ..................................
Skala ocen: (6.0 – celująca), 5.0 – bardzo dobra, 4.5 – plus dobra, 4.0 – dobra, 3.5 – plus dostateczna, 3.0 – dostatetczna, 2.0 – niedostatetczna
4
Spis treści
1 Wstęp 6
2 Kwantowy oscylator harmoniczny - 1D 72.1 Opis teoretyczny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Operator energii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1.2 Analityczne rozwiązania problemu własnego . . . . . . . . . . . . . . . . 8
2.2 Metoda elementów skończonych z liniowymi funkcjami kształtu dla oscylatorajednowymiarowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.1 Opis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2.2 Wyniki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Kwantowy oscylator harmoniczny - 2D 173.1 Opis teoretyczny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Metoda elementów skończonych - elementy czworokątne . . . . . . . . . . . . . . 17
3.2.1 Pierwsze wyniki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2.2 Optymalizacja pudła obliczeniowego . . . . . . . . . . . . . . . . . . . . . 243.2.3 Zagęszczanie siatki dla elementów czworokątnych . . . . . . . . . . . . . 273.2.4 Wygładzanie siatki metodą Laplace’a . . . . . . . . . . . . . . . . . . . . 29
3.3 Metoda elementów skończonych - elementy trójkątne . . . . . . . . . . . . . . . 333.3.1 Pierwsze wyniki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.3.2 Zagęszczanie siatki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4 Podsumowanie i wnioski 44
5
1 Wstęp
Zjawiska fizyczne zachodzące w ośrodku ciągłym są często opisywane przez cząstkowe rów-nania różniczkowe, które tylko w szczególnych przypadkach udaje się rozwiązać analitycznie.Do modelowania zjawisk oraz do opisu działania wielu urządzeń musimy używać metod nume-rycznych [1, 2, 3]. Do rozwiązywania równań cząstkowych wprowadzono wiele różnych podejśćnumerycznych. Najprostszym z nich jest metoda różnic skończonych, w której dyskretyzuje sięciągły ośrodek, zastępuje się pochodne przez ilorazy różnicowe i pracuje się na siatce punktów,zwanych niekiedy węzłami. Główną zaletą tej metody jest jej prostota. Jednak jej złożonośćobliczeniowa silnie rośnie z rozmiarem przestrzeni. Ponadto, metoda różnic skończonych nie-zbyt dobrze radzi sobie z problemami, w których konieczny jest dokładniejszy opis rozwiązańwe fragmencie pudła obliczeniowego. Lokalne zagęszczanie siatki różnicowej wiąże się ze stoso-waniem asymetrycznych ilorazów różnicowych, których dokładność jest mniejsza niż ilorazówcentralnych. Z tego powodu, metoda różnic skończonych jest mało przydatna do opisu proble-mów złożonych i w zastosowaniach przemysłowych jest rzadko używana. Najbardziej popularnąmetodą dla praktycznych zastosowań jest metoda elementów skończonych [1, 2]. W metodzie tejcały ośrodek dzielimy na fragmenty zwane elementami. W każdym z nich wprowadzamy pewnąliczbę węzłów. Mają one inną interpretację niż w metodzie różnic skończonych. Z każdym z wę-złów związana jest jedna lub więcej wielomianowych funkcji kształtu. Najczęściej wprowadzasię jedną funkcję kształtu na węzeł. W tym przypadku funkcje kształtu są wielomianami inter-polacyjnymi Lagrange’a. W metodzie szukamy rozwiązań w węzłach, a rozwiązanie równaniaróżniczkowego poza węzłami jest superpozycją funkcji kształtu dla danego elementu.
Metoda elementów skończonych jest metodą wariacyjną, w której używa się złożonej, lo-kalnie wielomianowej funkcji próbnej. Z funkcją próbną można związać pewien funkcjonał.Na przykład w problemach elektrostatyki funkcjonałem tym jest całka z lagranżjanu układuładunek-pole. Dla problemów stanów własnych w mechanice kwantowej odpowiednim funkcjo-nałem jest wartość oczekiwana energii. Rozwiązanie przybliżone jest tym bliższe dokładnemuim mniejsza jest wartość funkcjonału. Dzięki temu, wartość funkcjonału można potraktowaćjako wskazówkę dla optymalizacji funkcji próbnej. Dla metody elementów skończonych pozwa-la to na optymalizację rozmiarów pudła obliczeniowego, rozmieszczenia i kształtu elementów.Swoboda w wyborze elementów jest uważana za największą siłę metody.
Celem niniejszej pracy było sprawdzenie działania metody elementów skończonych dla jed-nego z najbardziej popularnych problemów w mechanice kwantowej – równania oscylatora har-monicznego. Kwantowy oscylator harmoniczny jest szczególnie ważny w mechanice kwantowej,ponieważ jest jednym z niewielu problemów, które można rozwiązać analitycznie, co pozwoli nadyskusję dokładności metody. Problem oscylatora harmonicznego jest ważny np. dla nanostruk-tur półprzewodnikowych. Są to układy wiążące pewną liczbę elektronów lub dziur. Źródłempotencjału uwięzienia jest często pole elektryczne. Potencjał pola elektrycznego dla ciągłegorozkładu ładunków jest gładki i w otoczeniu minimum często opisać go można przy pomocyparaboli. Potencjał paraboliczny występuje właśnie w problemie oscylatora harmonicznego.
W drugim rozdziale pracy zbadany jest problem jednowymiarowego oscylatora harmonicz-nego. Do studium zastosowano najprostsze – odcinkami liniowe – funkcje kształtu. Funkcje tesą stosunkowo mało elastyczne, i jak pokażemy szczególnie ważna dla nich jest optymalizacjapołożenia węzłów. W trzecim rozdziale pracy badany jest problem oscylatora dwuwymiarowe-go w wersji zarówno izotropowej jak i anizotropowej. Lekka anizotropia wprowadzona zostaław celu dyskusji optymalizacji położenia węzłów dla stanów wzbudzonych, dla zniesienia wie-lokrotnej degeneracji poziomów energetycznych oscylatora izotropowego. Przebadane zostałyprzypadki elementów czworokątnych i w szczególności kwadratowych. Zastosowano równieżelementy trójkątne. Sprawdzono w praktyce kilka metod zagęszczania siatki i wygładzania roz-kładu elementów.
6

2 Kwantowy oscylator harmoniczny - 1D
2.1 Opis teoretyczny
2.1.1 Operator energii
W formalizmie Hamiltona wyrażenie na energię dane jest funkcją położenia i pędu, zwaną funk-cją Hamiltona. Hamiltonian ten dla jednowymiarowej cząstki w zewnętrznym polu przyjmujepostać:
H(x, p) =p2
2m+ V (x) (1)
Z uwagi na zależność hamiltonianu od położenia i pędu, operator energii konstruujemy wsta-wiając do powyższej zależności zamiast klasycznych argumentów odpowiednie operatory:
H =−~2
2md2
dx2+ V (x) (2)
Jest to tak zwany operator Hamiltona.Kwantowy oscylator harmoniczny to odpowiednik klasycznego układu złożonego z cząstki w po-lu sił sprężystych. Potencjał oscylatora harmonicznego jest proporcjonalny do kwadratu odległo-ści cząstki od położenia równowagi (przy czym za położenie równowagi przyjmyjemy początekukładu):
V (x) =k
2x2 (3)
W powyższym wzorze k jest współczynnikiem sprężystości, zastępujemy go inną stałą przyj-mując:
k = mω2 (4)
przez co hamiltonian układu ma postać:
H =−~2
2md2
dx2+mω2
2x2 (5)
W celu otrzymania bezwymiarowej postaci hamiltonianu musimy pozbyć się stałych wystę-pujących w wyrażeniu. Dokonamy tego dobierając odpowiednio jednostki odległości i energii.Za jednostkę długości przyjmiemy a [4]. Wstawiając do hamiltonianu otrzymamy:
H =−~2
2ma2
d2
dx2+mω2
2a2x2 (6)
Jednostkę długości dobieramy tak, aby ujednolicić stałe w obu składnikach hamiltonianu. Chce-my aby:
~2
2ma2=mω2
2a2x2 (7)
Stąd otrzymujemy:
a =
√~mω
(8)
co po wstawieniu do hamiltonianu daje:
H =(− d2
dx2+ x2
)~ω2
(9)
Jeżeli za jednostkę energii przyjmiemyε = ~ω (10)
7

uzyskamy tzw. bezwymiarową postać hamiltonianu:
H =12
(− d2
dx2+ x2
)(11)
2.1.2 Analityczne rozwiązania problemu własnego
Równanie własne: (− d2
dx2+ x2 − E
)Ψ(x) = 0 (12)
rozwiązujemy stosując podstawienie:
Ψ(x) = e−x2ϕ(x) (13)
dzięki któremu dla funkcji ϕ(x) uzyskujemy równanie:
0 =(− d2
dx2+ x2 − E
)e−x2
2 ϕ(x) = − ddx
((−x)e−
x2
2 ϕ(x) + e−x2
2 ddxϕ(x)
)+ (x2 − E) e−
x2
2 ϕ(x) = e−x2
2
(1− x2 + 2x d
dx− d2
dx2+ x2 − E
)ϕ(x)
= e−x2
2
(1 + 2x d
dx− d2
dx2− E
)ϕ(x)
z którego wynika, iż funkcja ϕ(x) musi spełniać zależność:
ϕ′′ − 2xϕ′ + (E − 1)ϕ = 0 (14)
Równanie to dla E−1 = 2n, gdzie n ∈ (0, 1, 2, ...), posiada rozwiązania w postaci wielomianówstopnia n, noszących nazwę wielomianów Hermite’a:
Hn(x) = (−1)nex2 dn
dxne−x
2(15)
Dla wartości E nie spełniających podanego warunku równanie własne hamiltonianu nie posia-da rozwiązań skończonych w całej przestrzeni. Uzyskaliśmy więc dyskretny układ poziomówenergetycznych:
En = (n+12
)~ω (16)
wraz z odpowiadającymi im funkcjami własnymi:
Ψn(x) =1√√πn!2n
e−x2
2 Hn(x) (17)
8

2.2 Metoda elementów skończonych z liniowymi funkcjami kształtu
dla oscylatora jednowymiarowego
2.2.1 Opis
Poszukujemy rozwiązania niezależnego od czasu równania Schroedinger’a:(H − E
)Ψ = 0 (18)
w podprzestrzeni Ω ⊂ R, gdzie E ∈ σ(H) przyjmuje dyskretne wartości własne kwantowegohamiltonianu H.
Niech funkcje φi(i = 1, ..., N) stanowią bazę przestrzeni Ω. Poszukiwaną funkcję falową możnaprzedstawić w postaci:
Ψ(x) =∑m
∑n
cmn φmn (x) (19)
gdzie cmn - liczby rzeczywiste; m - ilość elementów, na które podzielona została przestrzeń Ω;n - ilość węzłów w jednym elemencie
W jednowymiarowej przestrzeni Ω fizycznie problem opisany jest na siatce punktów [xi, ..., xN ].Siatkę tą dzielimy na N − 1 elementów odniesiania, zwanych elementami skończonymi, w któ-rych przeprowadzać będziemy obliczenia. Pojedynczy element skończony Km = (xm−1, xm)w przestrzeni referencyjnej jest odcinkiem o współrzędnych (−1, 1). Mapowanie z przestrzeni
Rysunek 1: Jednowymiarowy element w przestrzeni referencyjnej
referencyjenej do fizycznej określone jest zależnością
x =xm−1 + xm
2+xm − xm−1
2ξ (20)
gdzie ξ należy do przedziału (−1, 1).
Każdy węzeł posiada unikalny numer globalny oraz numer lokalny wewnątrz elementu, do któ-rego należy.
Rysunek 2: Globalna numeracja węzłów na siatce [U ], lokalna numeracja wewnątrz elementu [u]
Po zmianie numeracji na globalną równanie (19) przyjmuje postać:
Ψ(x) =∑i
ciφi(x) (21)
9

Wewnątrz elementów skończonych obieramy funkcje jednoznacznie określające rozkład analizo-wanej wielkości fizycznej w zależności od wartości tych wielkości fizycznych w węzłach. Są to takzwane funkcje węzłowe lub funkcje kształtu. Liczba funkcji kształtu w pojedynczym elemencieskończonym jest równa liczbie jego węzłów, ponadto funkcje te zawsze są tak zbudowane, abyw węzłach których dotyczą ich wartości wynosiły jeden, a pozostałych węzłach przyjmowa-ły wartość zero. W tym rozdziale zastosujemy najprostsze - liniowe funkcje kształtu. W tymprzypadku w każdym elemencie mamy tylko dwa węzły, każdy związany z początkiem i koń-cem elementu. Dla jednowymiarowego elementu o dwóch węzłach definiujemy liniowe funkcjewęzłowe mające postać:
φ1(ξ) =12− 1
2ξ (22)
φ2(ξ) =12
+12ξ (23)
Dodatkowo funkcje φi(x) stanowią bazę przestrzeni Ω, w której poszukujemy rozwiązania.
Rysunek 3: Funkcje kształtu dla elementu skończonego
Rozwiązując równanie własne kwantowego oscylatora harmonicznego znajdziemy wartości szu-kanych współczynników ci.Do równania:
−12d2ψn(x)dx2
+12x2ψn(x) = Enψn(x)
∣∣∣×φj ∫ dx (24)
wstawiamy (21) otrzymując:
∑i
12
(∫ xm+1
xmdxdφj(x)dx
dφi(x)dx
+ x2φi(x)φj(x))ci = E
∑i
∫ xm+1
xmdxφj(x)φi(x)ci (25)
Jest to tzw. uogólnione macierzowe równanie własne:
Hc = ESc (26)
gdzie H jest macierzą hamiltonianu określoną wzorem:
Hij =⟨φi, Hφj
⟩:=∫
Ωφi(Hφj)dΩ =
∫ xm+1
xmdxdφj(x)dx
dφi(x)dx
+ x2φi(x)φj(x) (27)
natomiast S jest macierzą przekrywania określoną przez:
Sij = 〈φi, φj〉 :=∫
ΩφiφjdΩ =
∫ xm+1
xmdxφj(x)φi(x) (28)
Całki oraz pochodne ‘przenosimy’ do przestrzeni referencyjnej korzystając z mapowania (20)oraz uwzględniając skalę transformacji (jakobian) m-tego elementu równą
Jm =dx
dξ(29)
10

Dla przestrzeni jednowymiarowej jakobian nie zależy od ξ i dla użytych liniowych funkcji kształ-tu jego wartość wynosi
Jm =hm2
(30)
gdzie hm - długość m-tego elementuOstatecznie otrzymujemy:
Hmij = 1
2
∫ 1−1
(φ′i(ξ)φ
′j(ξ)
1Jm
+ x(ξ)2φi(ξ)φj(ξ)Jm)dξ (31)
Smij =∫ 1−1 dξφi(ξ)φj(ξ)Jm (32)
Całki w powyższych wzorach liczymy numerycznie używając sześciopunktowej jednowymiarowejkwadratury Gauss’a [5]: ∫ 1
−1dξg(ξ) =
6∑i=1
wig(xi) (33)
gdzie wi - wagi kwadratury, xi - węzły kwadratury, a g(ξ) - funkcja podcałkowa.Globalne macierze sztywności oraz przekrywania znajdujemy sumując, odpowiednie wartościlokalnych macierzy dla każdego z m elementów przechodząc po każdym z węzłów i,j:
H(lg(i,m), lg(j,m)) =∑m
∑i,j
H(lg(i,m), lg(j,m))
S(lg(i,m), lg(j,m)) =∑m
∑i,j
S(lg(i,m), lg(j,m))
gdzie pętla po m przebiega przez wszystkie elementy, a po i, j po parach wszystkich węzłóww elemencie m. W powyższym wzorze lg(l, k) to funkcja przyporządkowująca globalny numerwęzła dla lokalnego węzła l w elemencie k.Dla tak przygotowanych macierzy rozwiązujemy uogólnione macierzowe równanie własne znaj-dując wartości współczynników ci. Po rozwiązaniu równania własnego, możemy wyznaczyćprzebieg przybliżonego rozwiązania w przestrzeni odniesienia elementu m, ze wzoru
u(ξ) =2∑i=1
cmi φi(ξ). (34)
Wyniki w przestrzeni rzeczywistej uzyskamy wykorzystując mapowanie (20).
11
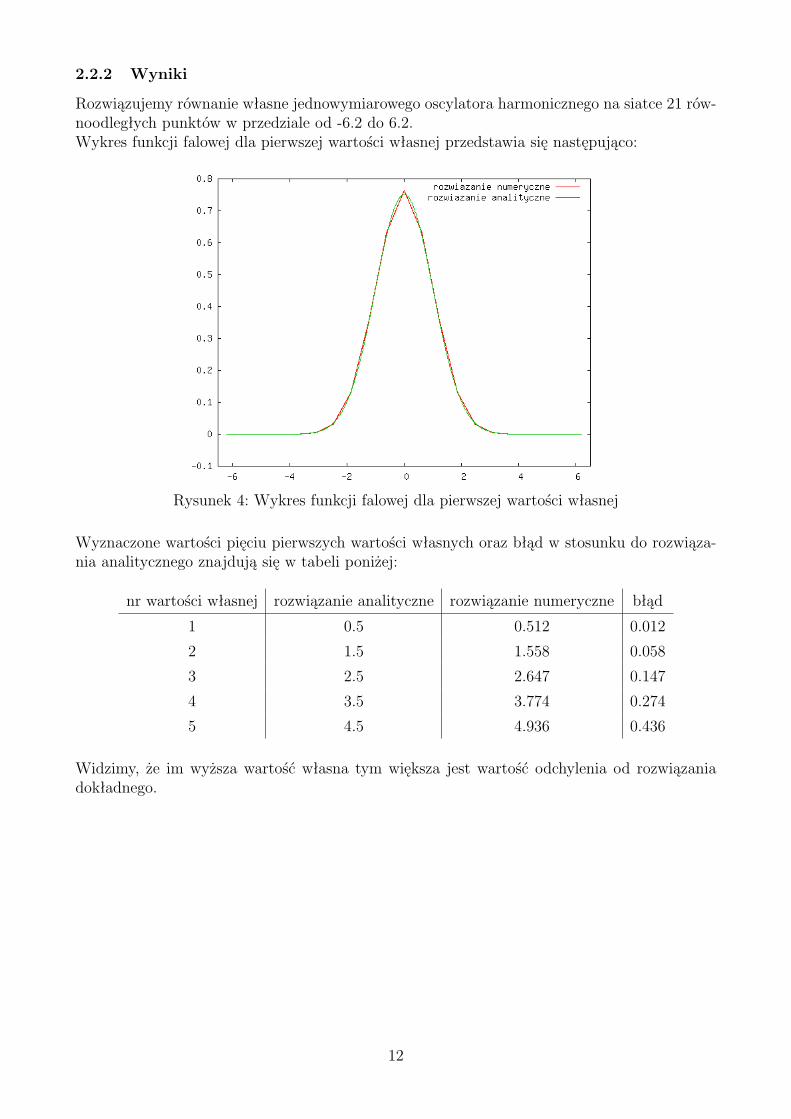
2.2.2 Wyniki
Rozwiązujemy równanie własne jednowymiarowego oscylatora harmonicznego na siatce 21 rów-noodległych punktów w przedziale od -6.2 do 6.2.Wykres funkcji falowej dla pierwszej wartości własnej przedstawia się następująco:
Rysunek 4: Wykres funkcji falowej dla pierwszej wartości własnej
Wyznaczone wartości pięciu pierwszych wartości własnych oraz błąd w stosunku do rozwiąza-nia analitycznego znajdują się w tabeli poniżej:
nr wartości własnej rozwiązanie analityczne rozwiązanie numeryczne błąd
1 0.5 0.512 0.012
2 1.5 1.558 0.058
3 2.5 2.647 0.147
4 3.5 3.774 0.274
5 4.5 4.936 0.436
Widzimy, że im wyższa wartość własna tym większa jest wartość odchylenia od rozwiązaniadokładnego.
12
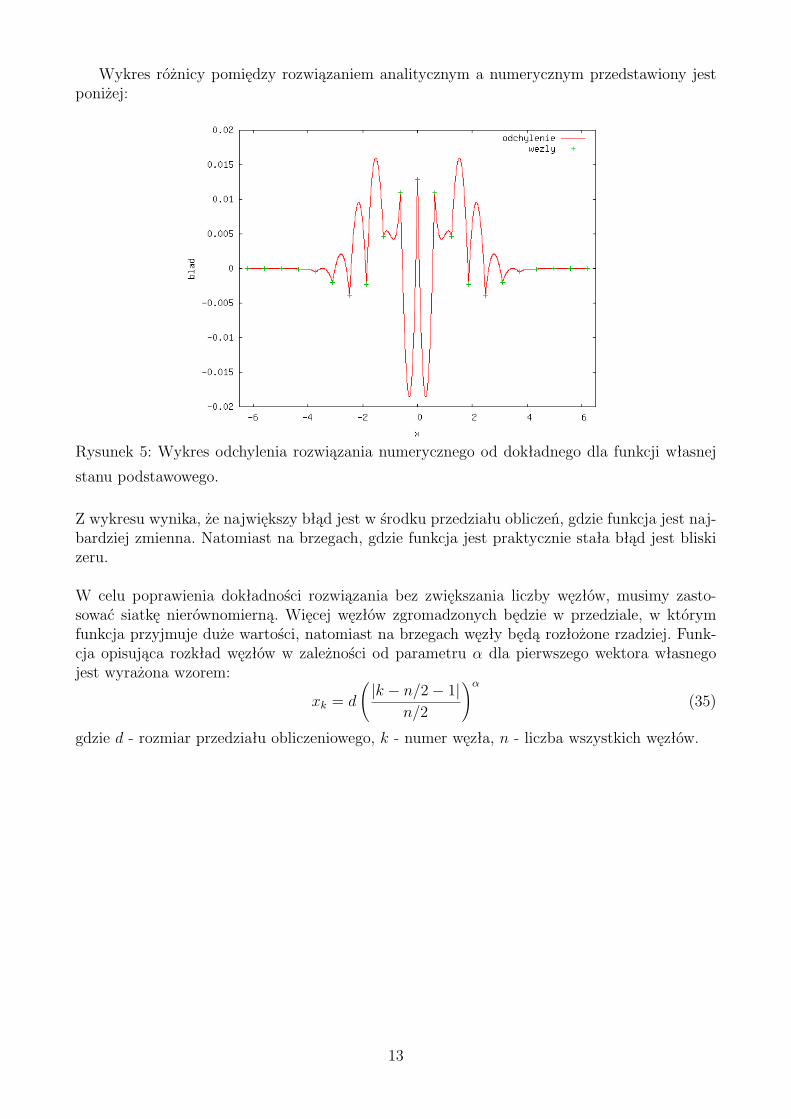
Wykres różnicy pomiędzy rozwiązaniem analitycznym a numerycznym przedstawiony jestponiżej:
Rysunek 5: Wykres odchylenia rozwiązania numerycznego od dokładnego dla funkcji własnej
stanu podstawowego.
Z wykresu wynika, że największy błąd jest w środku przedziału obliczeń, gdzie funkcja jest naj-bardziej zmienna. Natomiast na brzegach, gdzie funkcja jest praktycznie stała błąd jest bliskizeru.
W celu poprawienia dokładności rozwiązania bez zwiększania liczby węzłów, musimy zasto-sować siatkę nierównomierną. Więcej węzłów zgromadzonych będzie w przedziale, w którymfunkcja przyjmuje duże wartości, natomiast na brzegach węzły będą rozłożone rzadziej. Funk-cja opisująca rozkład węzłów w zależności od parametru α dla pierwszego wektora własnegojest wyrażona wzorem:
xk = d
(|k − n/2− 1|
n/2
)α(35)
gdzie d - rozmiar przedziału obliczeniowego, k - numer węzła, n - liczba wszystkich węzłów.
13
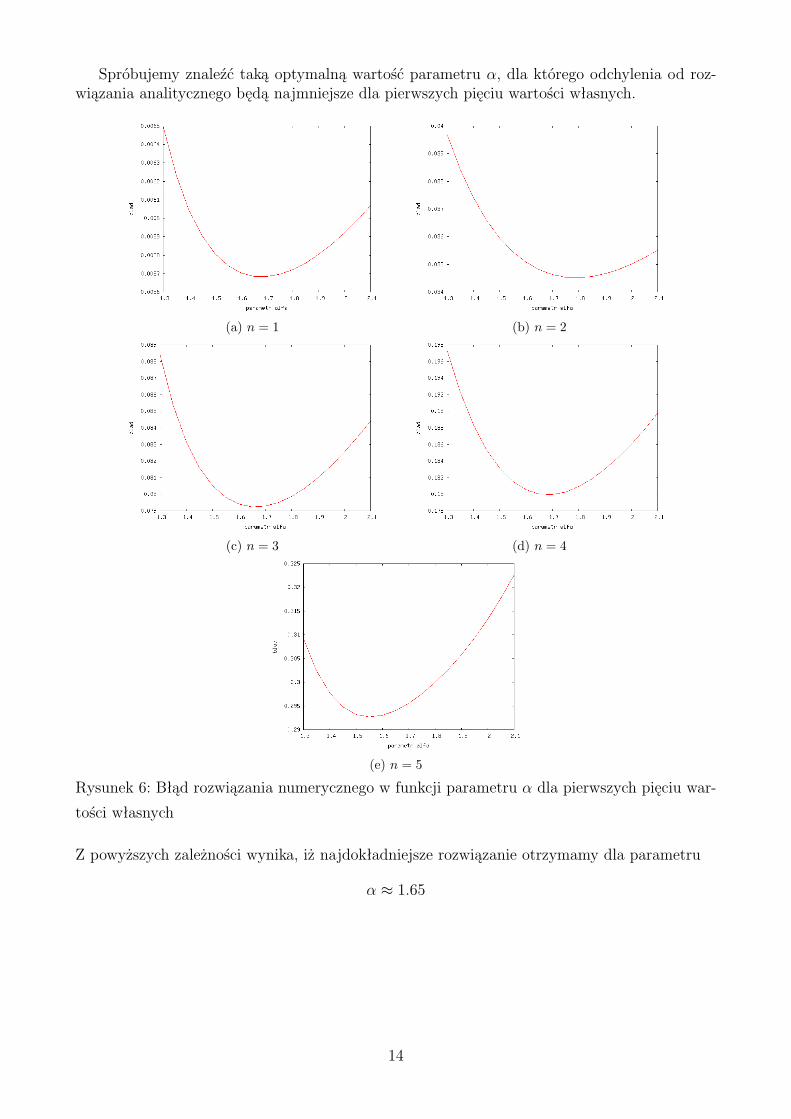
Spróbujemy znaleźć taką optymalną wartość parametru α, dla którego odchylenia od roz-wiązania analitycznego będą najmniejsze dla pierwszych pięciu wartości własnych.
(a) n = 1 (b) n = 2
(c) n = 3 (d) n = 4
(e) n = 5
Rysunek 6: Błąd rozwiązania numerycznego w funkcji parametru α dla pierwszych pięciu war-
tości własnych
Z powyższych zależności wynika, iż najdokładniejsze rozwiązanie otrzymamy dla parametru
α ≈ 1.65
14
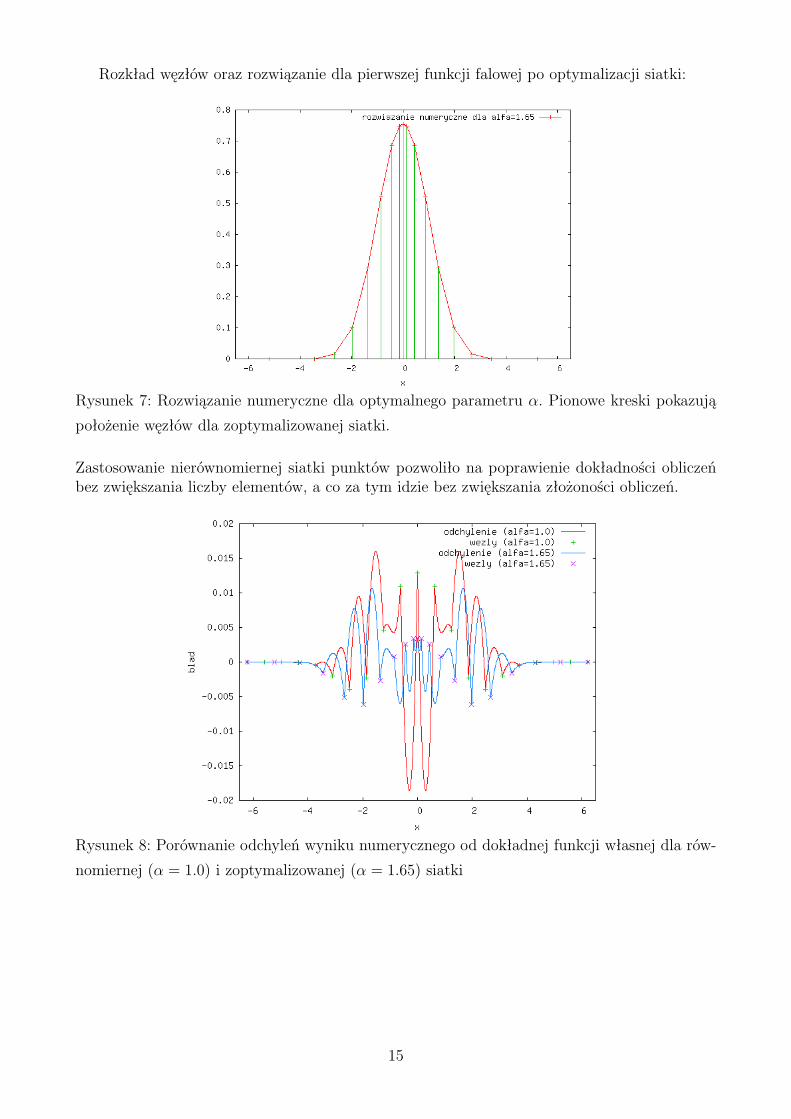
Rozkład węzłów oraz rozwiązanie dla pierwszej funkcji falowej po optymalizacji siatki:
Rysunek 7: Rozwiązanie numeryczne dla optymalnego parametru α. Pionowe kreski pokazują
położenie węzłów dla zoptymalizowanej siatki.
Zastosowanie nierównomiernej siatki punktów pozwoliło na poprawienie dokładności obliczeńbez zwiększania liczby elementów, a co za tym idzie bez zwiększania złożoności obliczeń.
Rysunek 8: Porównanie odchyleń wyniku numerycznego od dokładnej funkcji własnej dla rów-
nomiernej (α = 1.0) i zoptymalizowanej (α = 1.65) siatki
15
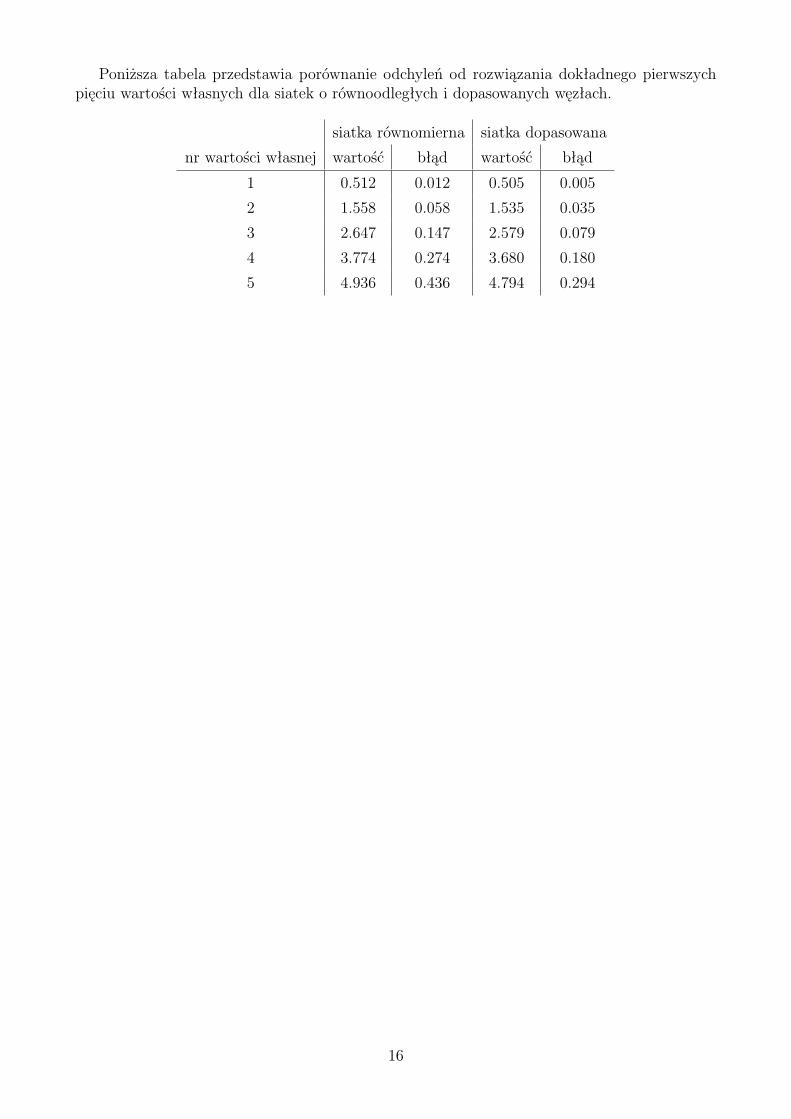
Poniższa tabela przedstawia porównanie odchyleń od rozwiązania dokładnego pierwszychpięciu wartości własnych dla siatek o równoodległych i dopasowanych węzłach.
siatka równomierna siatka dopasowana
nr wartości własnej wartość błąd wartość błąd
1 0.512 0.012 0.505 0.005
2 1.558 0.058 1.535 0.035
3 2.647 0.147 2.579 0.079
4 3.774 0.274 3.680 0.180
5 4.936 0.436 4.794 0.294
16

3 Kwantowy oscylator harmoniczny - 2D
3.1 Opis teoretyczny
Hamiltonian układu
Dla układu dwuwymiarowego operator Hamiltona jest sumą jednowymiarowych operatorówzmiennych x oraz y:
H = Hx + Hy (36)
gdzie:
Hx =−~2
2ma2
∂2
∂x2+mω2
2a2x2 (37)
Hy =−~2
2ma2
∂2
∂y2+mω2
2a2y2 (38)
Po podstawieniu powyższych zależności i odpowiednich przekształceniach otrzymujemy bezwy-miarową postać hamiltonianu dla dwuwymiarowego oscylatora harmonicznego:
H = −12
(∂2
∂x2+
∂2
∂y2
)+
12
(x2 + y2
)(39)
Równanie własne i energia układu
Analogicznie jak przy funkcji Hamiltona, tak i przy znajdowaniu równania własnego oraz pozio-mów energetycznych dwuwymiarowego oscylatora harmonicznego, stosujemy separację zmien-nych. Funkcje własne mają postać:
Ψn(x, y) = ψi(x)ψj(y) (40)
gdzie
ψi(x) =1√√πi!2i
e−x2
2 Hi(x) (41)
ψj(y) =1√√πj!2j
e−y2
2 Hj(y) (42)
natomiast energia układu wyraża się przez:
En = Exi + Ey
j = i+ j + 1 (43)
3.2 Metoda elementów skończonych - elementy czworokątne
Opis
Rozwiążemy niezależne od czasu równanie Schroedinger’a:(H − E
)Ψ = 0 (44)
w podprzestrzeni Ω ⊂ R2, gdzie E ∈ σ(H) przyjmuje dyskretne wartości własne kwantowegoHamiltonianu H.
17

Obieramy przybliżenie funkcji falowej:
Ψ(x, y) =∑m
∑n
cmn φmn (x, y) (45)
gdzie m - ilość elementów, na które podzielona została przestrzeń, a n - ilość węzłów w jednymelemencie
Po zmianie numeracji na globalną powyższe równanie przyjmuje postać:
Ψ(x, y) =∑i
ciφi(x, y) (46)
Funkcje φi(x, y) stanowią bazę przestrzeni Ω, a wartości ci są liczbami rzeczywistymi.Po przekształceniach otrzymujemy uogólnione równanie własne:
Hc = ESc (47)
gdzie H - macierz Hamiltonianu, S - macierz przekrywania
Obszar Ω dzielimy na m kwadratowych elementów, tzw. elementów skończonych - tak jak toprzedstawiono na rysunku 9. Każdy element oraz węzeł posiada swój unikalny, globalny numer.
Rysunek 9: Podział obszaru Ω na kwadratowe elementy skończone
Pojedynczy element w przestrzeni referencyjnej jest kwadratem o bokach (±1,±1).
Rysunek 10: Pojedynczy element w przestrzeni referencyjnej
Mapowanie kwadratowego elementu odniesienia (ξ1, ξ2) do czworokątnego elementu fizycznegom dane jest przez wzór: (
xy
)=
4∑i=1
(x
(m)i
y(m)i
)φi(ξ1, ξ2) (48)
gdzie(x
(m)i , y
(m)i
)są współrzędnymi i-tego wierzchołka elementu m w przestrzeni fizycznej,
natomiast funkcja φi jest jedną z czterech biliniowych funkcji kształtu.
18
Funkcje kształtu dla kwadratowego elementu skończonego to:
φ1(ξ1, ξ2) =14
(1 + ξ1)(1 + ξ2) (49)
φ2(ξ1, ξ2) =14
(1 + ξ1)(1− ξ2) (50)
φ3(ξ1, ξ2) =14
(1− ξ1)(1− ξ2) (51)
φ4(ξ1, ξ2) =14
(1− ξ1)(1 + ξ2) (52)
Funkcje te są iloczynami liniowych funkcji Lagrange’a w kierunkach ξ1 i ξ2.
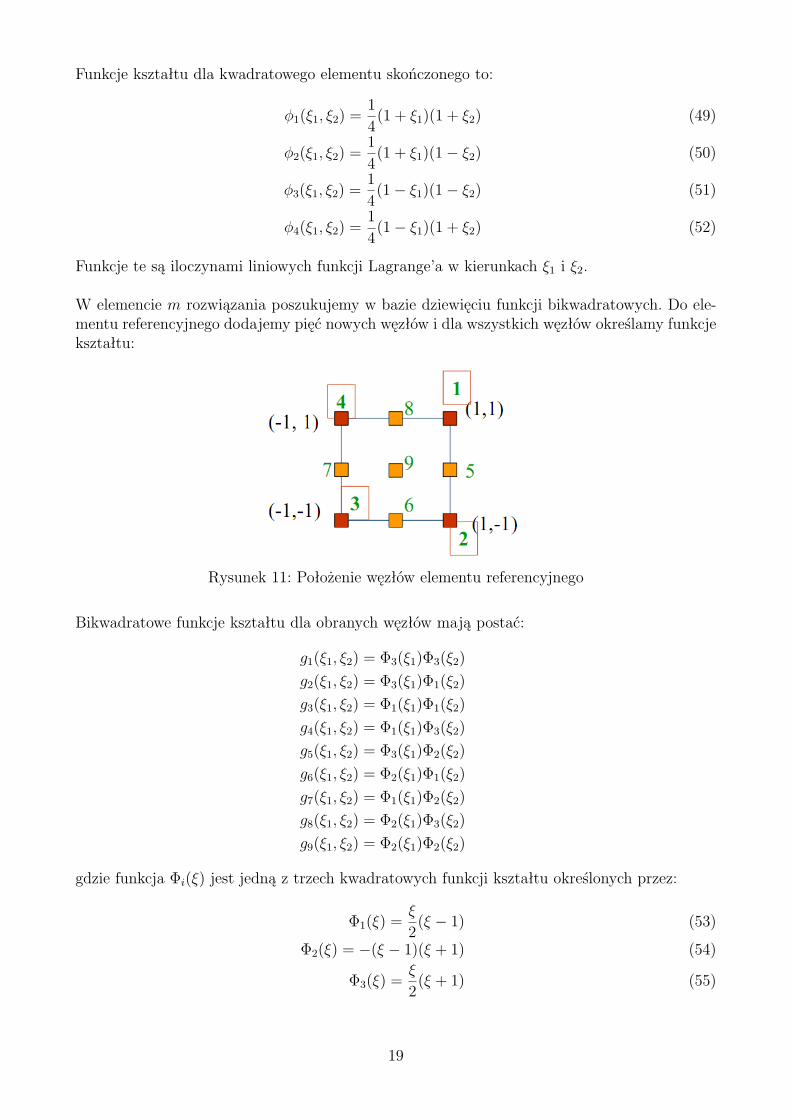
W elemencie m rozwiązania poszukujemy w bazie dziewięciu funkcji bikwadratowych. Do ele-mentu referencyjnego dodajemy pięć nowych węzłów i dla wszystkich węzłów określamy funkcjekształtu:
Rysunek 11: Położenie węzłów elementu referencyjnego
Bikwadratowe funkcje kształtu dla obranych węzłów mają postać:
g1(ξ1, ξ2) = Φ3(ξ1)Φ3(ξ2)g2(ξ1, ξ2) = Φ3(ξ1)Φ1(ξ2)g3(ξ1, ξ2) = Φ1(ξ1)Φ1(ξ2)g4(ξ1, ξ2) = Φ1(ξ1)Φ3(ξ2)g5(ξ1, ξ2) = Φ3(ξ1)Φ2(ξ2)g6(ξ1, ξ2) = Φ2(ξ1)Φ1(ξ2)g7(ξ1, ξ2) = Φ1(ξ1)Φ2(ξ2)g8(ξ1, ξ2) = Φ2(ξ1)Φ3(ξ2)g9(ξ1, ξ2) = Φ2(ξ1)Φ2(ξ2)
gdzie funkcja Φi(ξ) jest jedną z trzech kwadratowych funkcji kształtu określonych przez:
Φ1(ξ) =ξ
2(ξ − 1) (53)
Φ2(ξ) = −(ξ − 1)(ξ + 1) (54)
Φ3(ξ) =ξ
2(ξ + 1) (55)
19
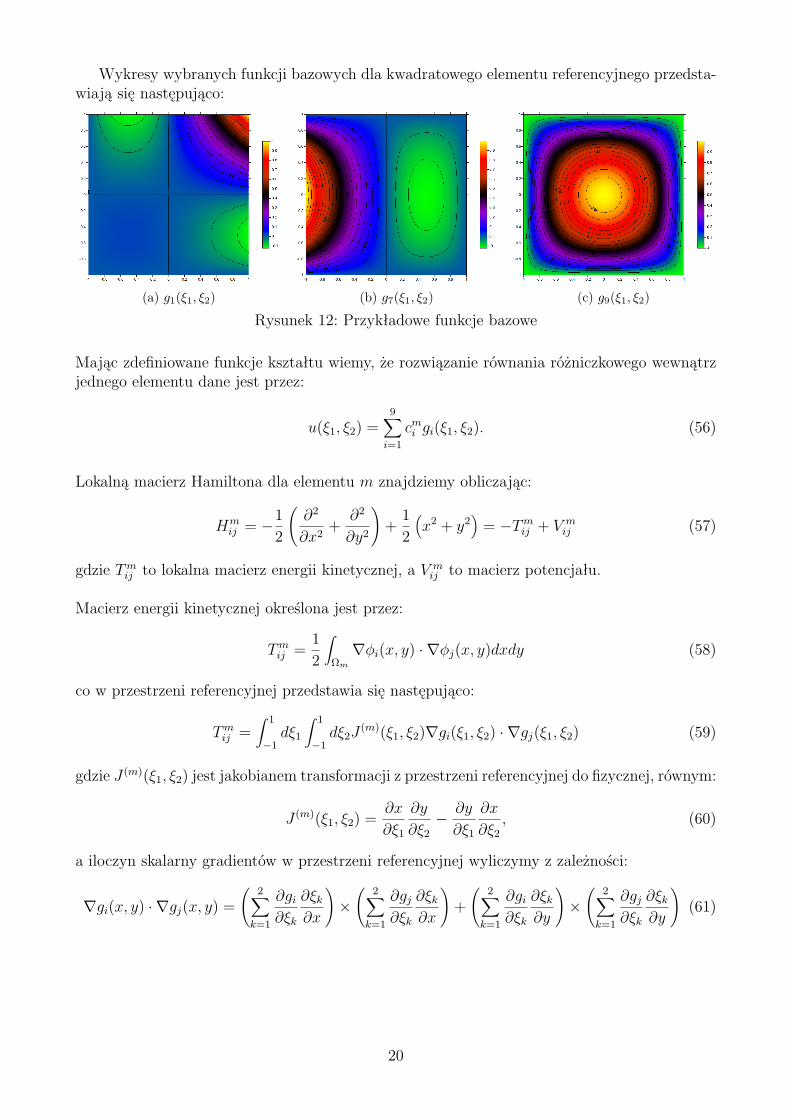
Wykresy wybranych funkcji bazowych dla kwadratowego elementu referencyjnego przedsta-wiają się następująco:
(a) g1(ξ1, ξ2) (b) g7(ξ1, ξ2) (c) g9(ξ1, ξ2)
Rysunek 12: Przykładowe funkcje bazowe
Mając zdefiniowane funkcje kształtu wiemy, że rozwiązanie równania różniczkowego wewnątrzjednego elementu dane jest przez:
u(ξ1, ξ2) =9∑i=1
cmi gi(ξ1, ξ2). (56)
Lokalną macierz Hamiltona dla elementu m znajdziemy obliczając:
Hmij = −1
2
(∂2
∂x2+
∂2
∂y2
)+
12
(x2 + y2
)= −Tmij + V m
ij (57)
gdzie Tmij to lokalna macierz energii kinetycznej, a V mij to macierz potencjału.
Macierz energii kinetycznej określona jest przez:
Tmij =12
∫Ωm∇φi(x, y) · ∇φj(x, y)dxdy (58)
co w przestrzeni referencyjnej przedstawia się następująco:
Tmij =∫ 1
−1dξ1
∫ 1
−1dξ2J
(m)(ξ1, ξ2)∇gi(ξ1, ξ2) · ∇gj(ξ1, ξ2) (59)
gdzie J (m)(ξ1, ξ2) jest jakobianem transformacji z przestrzeni referencyjnej do fizycznej, równym:
J (m)(ξ1, ξ2) =∂x
∂ξ1
∂y
∂ξ2− ∂y
∂ξ1
∂x
∂ξ2, (60)
a iloczyn skalarny gradientów w przestrzeni referencyjnej wyliczymy z zależności:
∇gi(x, y) · ∇gj(x, y) =( 2∑k=1
∂gi∂ξk
∂ξk∂x
)×( 2∑k=1
∂gj∂ξk
∂ξk∂x
)+( 2∑k=1
∂gi∂ξk
∂ξk∂y
)×( 2∑k=1
∂gj∂ξk
∂ξk∂y
)(61)
20

Zgodnie z mapowaniem elementu odniesienia do elementu fizycznego ze wzoru (48) pochodnewspółrzędnych fizycznych po referencyjnych określone są wzorami:
∂x
∂ξ1=
14
(x
(m)1 + x
(m)2 − x(m)
3 − x(m)4 + ξ2
(x
(m)1 − x(m)
2 + x(m)3 − x(m)
4
))(62)
∂x
∂ξ2=
14
(x
(m)1 − x(m)
2 − x(m)3 + x
(m)4 + ξ1
(x
(m)1 − x(m)
2 + x(m)3 − x(m)
4
))(63)
∂y
∂ξ1=
14
(y
(m)1 + y
(m)2 − y(m)
3 − y(m)4 + ξ2
(y
(m)1 − y(m)
2 + y(m)3 − y(m)
4
))(64)
∂y
∂ξ2=
14
(y
(m)1 − y(m)
2 − y(m)3 + y
(m)4 + ξ1
(y
(m)1 − y(m)
2 + y(m)3 − y(m)
4
))(65)
Pochodne odwrotne ∂ξk∂x
oraz ∂ξk∂y
potrzebne do wyznaczenia iloczynu skalarnego gradientóww przestrzeni referencyjnej obliczamy z zależności:(∂ξ1
∂x∂ξ1∂y
∂ξ2∂x
∂ξ2∂y
)=( ∂x∂ξ1
∂x∂ξ2
∂y∂ξ1
∂y∂ξ2
)−1
=1
J (m)(ξ1, ξ2)( ∂y
∂ξ2− ∂x∂ξ2
− ∂y∂ξ1
∂x∂ξ1
)(66)
Lokalna macierz potencjału elementu m w przestrzeni referencyjnej dana jest przez:
V mij =
12
∫ 1
−1dξ1
∫ 1
−1dξ2J
(m)gi(ξ1, ξ2)gj(ξ1, ξ2)(x(ξ1, ξ2)2 + y(ξ1, ξ2)2
)(67)
Macierz przekrywania, będąca odpowiednikiem wektora obciążeń, określona jest wzorem:
Smij =∫ 1
−1dξ1
∫ 1
−1dξ2J
(m)gi(ξ1, ξ2)gj(ξ1, ξ2) (68)
Obliczając wartości lokalnych macierzy wszystkie całki liczymy numerycznie używając złożeniasześciopunktowych jednowymiarowych kwadratur Gauss’a w każdym z kierunków:
∫ 1
−1dξ1
∫ 1
−1dξ2g(ξ1, ξ2) =
N∑i=1
N∑j=1
wiwjg(xi, xj) (69)
gdzie wk - wagi kwadratury, xk - węzły kwadraturyGlobalne macierze sztywności oraz przekrywania znajdujemy sumując według wzoru odpowied-nie wartości lokalnych macierzy dla każdego zm elementów przechodząc po każdym z węzłów i,j:
H(lg(i,m), lg(j,m)) =∑m
∑i,j
Hmij (70)
S(lg(i,m), lg(j,m)) =∑m
∑i,j
Smij (71)
gdzie funkcja lg(l, k) przyporządkowuje globalny numer węzła dla lokalnego węzła l w elemen-cie k.
Do macierzy globalnych wprowadzamy warunki brzegowe. Chcemy, aby funkcje własne zni-kały na brzegu - osiągniemy to przez wyzerowanie k-tego wiersza oraz kolumny, gdzie k toglobalny numer węzła brzegowego, a następnie ustawienie wartości Hkk = 1 oraz Skk = −1.Spowoduje to, że dostaniemy zdegenerowaną wartość własną równą −1 tylu krotnie ile jestwęzłów brzegowych.
21

Tak przygotowane macierze wstawiamy do układu równań i znajdujemy wartości współczynni-ków ci. Następnie ze wzoru
u(ξ1, ξ2) =9∑i=1
cmi gi(ξ1, ξ2). (72)
znajdujemy rozwiązanie w każdym z węzłów siatki.
22
3.2.1 Pierwsze wyniki
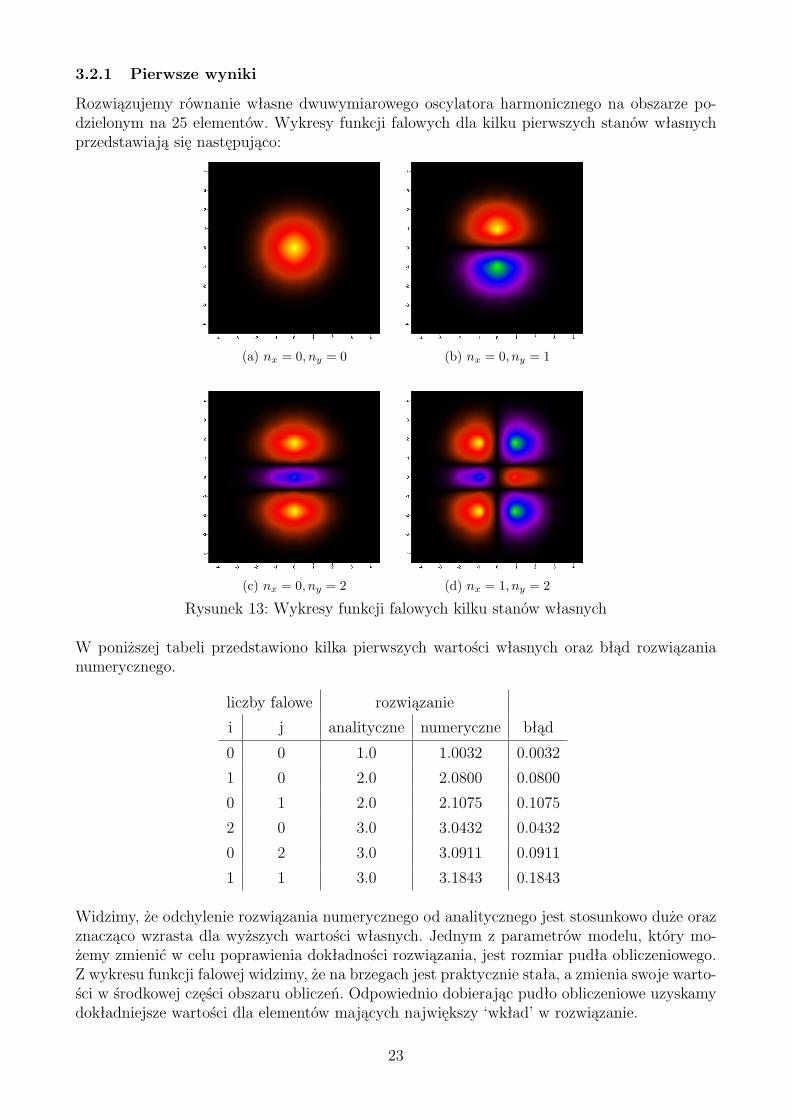
Rozwiązujemy równanie własne dwuwymiarowego oscylatora harmonicznego na obszarze po-dzielonym na 25 elementów. Wykresy funkcji falowych dla kilku pierwszych stanów własnychprzedstawiają się następująco:
(a) nx = 0, ny = 0 (b) nx = 0, ny = 1
(c) nx = 0, ny = 2 (d) nx = 1, ny = 2
Rysunek 13: Wykresy funkcji falowych kilku stanów własnych
W poniższej tabeli przedstawiono kilka pierwszych wartości własnych oraz błąd rozwiązanianumerycznego.
liczby falowe rozwiązanie
i j analityczne numeryczne błąd
0 0 1.0 1.0032 0.0032
1 0 2.0 2.0800 0.0800
0 1 2.0 2.1075 0.1075
2 0 3.0 3.0432 0.0432
0 2 3.0 3.0911 0.0911
1 1 3.0 3.1843 0.1843
Widzimy, że odchylenie rozwiązania numerycznego od analitycznego jest stosunkowo duże orazznacząco wzrasta dla wyższych wartości własnych. Jednym z parametrów modelu, który mo-żemy zmienić w celu poprawienia dokładności rozwiązania, jest rozmiar pudła obliczeniowego.Z wykresu funkcji falowej widzimy, że na brzegach jest praktycznie stała, a zmienia swoje warto-ści w środkowej części obszaru obliczeń. Odpowiednio dobierając pudło obliczeniowe uzyskamydokładniejsze wartości dla elementów mających największy ‘wkład’ w rozwiązanie.
23
3.2.2 Optymalizacja pudła obliczeniowego
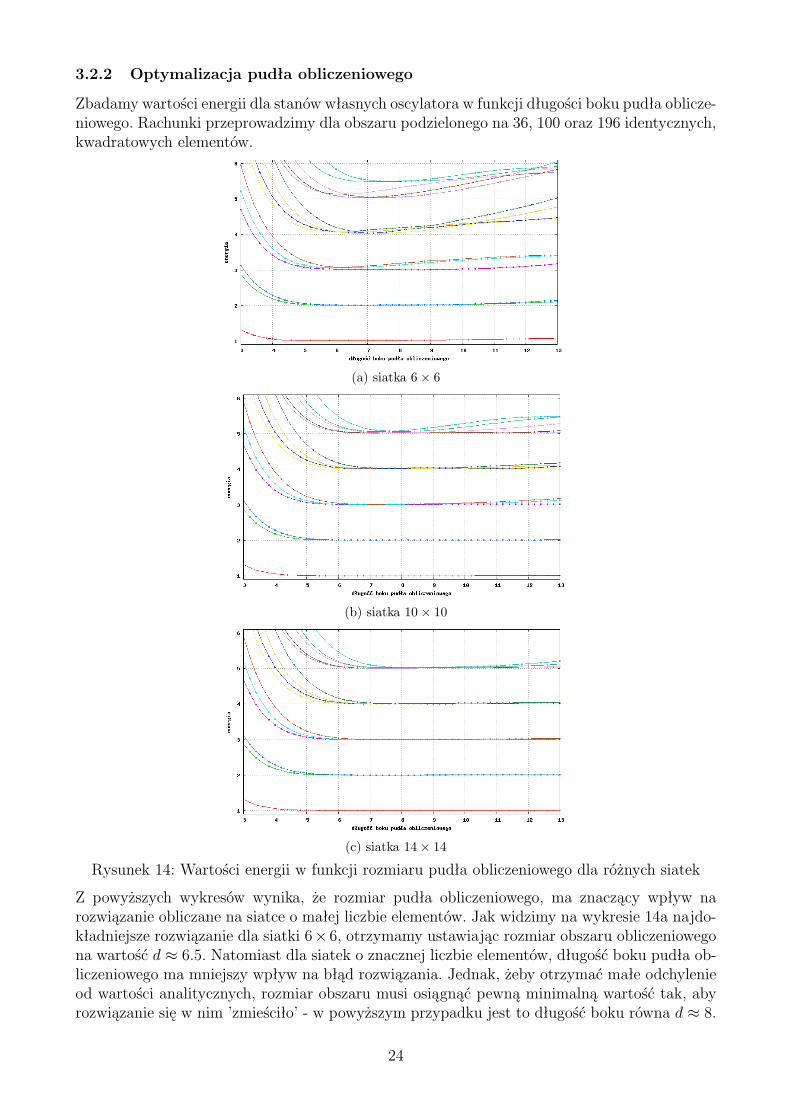
Zbadamy wartości energii dla stanów własnych oscylatora w funkcji długości boku pudła oblicze-niowego. Rachunki przeprowadzimy dla obszaru podzielonego na 36, 100 oraz 196 identycznych,kwadratowych elementów.
(a) siatka 6× 6
(b) siatka 10× 10
(c) siatka 14× 14
Rysunek 14: Wartości energii w funkcji rozmiaru pudła obliczeniowego dla różnych siatek
Z powyższych wykresów wynika, że rozmiar pudła obliczeniowego, ma znaczący wpływ narozwiązanie obliczane na siatce o małej liczbie elementów. Jak widzimy na wykresie 14a najdo-kładniejsze rozwiązanie dla siatki 6×6, otrzymamy ustawiając rozmiar obszaru obliczeniowegona wartość d ≈ 6.5. Natomiast dla siatek o znacznej liczbie elementów, długość boku pudła ob-liczeniowego ma mniejszy wpływ na błąd rozwiązania. Jednak, żeby otrzymać małe odchylenieod wartości analitycznych, rozmiar obszaru musi osiągnąć pewną minimalną wartość tak, abyrozwiązanie się w nim ’zmieściło’ - w powyższym przypadku jest to długość boku równa d ≈ 8.
24
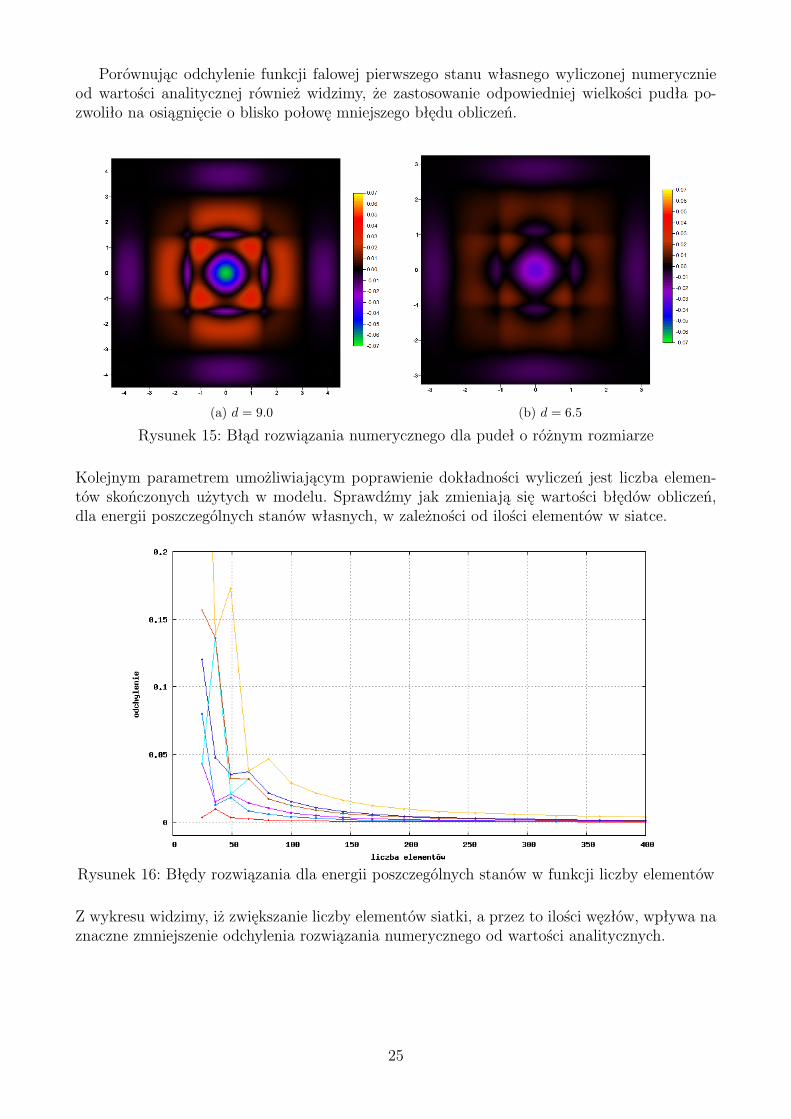
Porównując odchylenie funkcji falowej pierwszego stanu własnego wyliczonej numerycznieod wartości analitycznej również widzimy, że zastosowanie odpowiedniej wielkości pudła po-zwoliło na osiągnięcie o blisko połowę mniejszego błędu obliczeń.
(a) d = 9.0 (b) d = 6.5
Rysunek 15: Błąd rozwiązania numerycznego dla pudeł o różnym rozmiarze
Kolejnym parametrem umożliwiającym poprawienie dokładności wyliczeń jest liczba elemen-tów skończonych użytych w modelu. Sprawdźmy jak zmieniają się wartości błędów obliczeń,dla energii poszczególnych stanów własnych, w zależności od ilości elementów w siatce.
Rysunek 16: Błędy rozwiązania dla energii poszczególnych stanów w funkcji liczby elementów
Z wykresu widzimy, iż zwiększanie liczby elementów siatki, a przez to ilości węzłów, wpływa naznaczne zmniejszenie odchylenia rozwiązania numerycznego od wartości analitycznych.
25

Degeneracja wartości własnych
O zdegenerowanych wartościach własnych mówimy w przypadku, gdy jednej wartości własnejodpowiada kilka różnych funkcji własnych. Krotnością degeneracji nazywamy liczbę niezależ-nych funkcji odpowiadających jednej wartości własnej. W tabeli ?? widzimy, że dla trzeciawartość własna jest zdegenerowana trzykrotnie. Degeneracja wartości własnych w przypadkukwantowego oscylatora w 2-wymiarowej przestrzeni wynika z symetrii modelu. W celu zniesie-nia degeneracji musimy ’zaburzyć’ symetrię wprowadzając inną wartość potencjału w kierunkux niż w kierunku y. Zgodnie ze wzorem (36) wiemy, że hamilonian 2-wymiarowego oscylatoraharmonicznego jest sumą hamiltonianów w każdym z kierunków
H = Hx + Hy =−~2
2ma2
∂2
∂x2+ Vx(x) +
−~2
2ma2
∂2
∂y2+ Vy(y) (73)
gdzie Vx(x) = mω2x2 x2 oraz Vy(y) = mω2y
2 y2 określają potencjały w kierunkach odpowiednio x i y.Ustawienie ωx 6= ωy pozwoli na otrzymanie różnych wartości potencjałów.Popatrzmy jak przedstawiać się będą wartości energii dla poszczególnych stanów własnych,jeżeli zastosujemy różne wartości potencjałów. Zgodnie ze wzorem (10) za jednostkę energiiprzyjmujemy wartość ε = ~ω przez co energia układu wyraża się przez
Enxny = Enx + Eny =(nx +
12
)εx +
(ny +
12
)εy (74)
Przyjmując ωx = 1.1ωy wartości energii poszczególnych stanów własnych będą określone zależ-nością
Enxny =(nx +
12
)1.1ε+
(ny +
12
)ε (75)
dzięki czemu zniesiona zostanie degeneracja wszystkich stanów wzbudzonych, ponieważ każdemstanowi własnemy odpowiadać będzie inna wartość energii, przykładowo E12 6= E21.
Znajdujemy wartości energii kilku pierwszych stanów własnych dla siatki 10 × 10 i zniesio-nej degeneracji.
liczby falowe rozwiązanie
nx ny analityczne numeryczne błąd
0 1 2.05 2.05619 0.00619
1 0 2.15 2.15740 0.00740
0 2 3.05 3.06946 0.01946
1 1 3.15 3.16174 0.01174
2 0 3.25 3.27590 0.02590
0 3 4.05 4.08615 0.03615
1 2 4.15 4.17502 0.02502
2 1 4.25 4.28024 0.03024
3 0 4.35 4.39059 0.04059
W powyższej tabeli widzimy, że wszystkim stanom własnym odpowiadają różne wartości ener-gii.
26
3.2.3 Zagęszczanie siatki dla elementów czworokątnych
Zwiększanie liczby węzłów w siatce pozwala na znaczne poprawienie dokładności wyników ob-liczeń, jednak skutkuje to wydłużeniem czasu kalkulacji i zwiększeniem zapotrzebowania nazasoby pamięciowe. Z uwagi na fakt, że cała siatka jest równomiernie pokryta punktami częstoliczymy bardzo dokładnie obszary, w których funkcja jest mało zmienna i nie wymaga obliczeńz dużą dokładnością, np. na brzegach pudła obliczeniowego. Dlatego lepszym rozwiązaniem jestznalezienie obszarów, w których funkcja wykazuje dużą zmienność i pokrycie ich bardziej gęstąsiatką - mającą większą liczbę elemenów, niż obszary, w których rozwiązanie zmienia się tylkonieznacznie.
W celu zoptymalizowania siatki, w miejscach gdzie funkcja jest najbardziej zmienna, musi-my znaleźć ”wkład” każdego elemetu w modelu do ogólnego rozwiązania. Wiemy, że wartośćwłasna jest równa wartości oczekiwanej dla unormowanego wektora własnego, więc:
Eµ =〈Ψµ|HΨµ〉〈Ψµ|Ψµ〉
=m∑i=1
εµm (76)
gdzie m jest liczbą elementów siatki, a εµm jest poszukiwaną wartością przyczynka do energiistanu µ pochodzącą od elementu m.Rozpisując εµm mamy:
εµm =∑9k=1
∑9l=1C(lg(m, k), µ)C(lg(m, l), µ)H(k, l,m)
〈Ψµ|Ψµ〉(77)
gdzie:lg(m, i) - funkcja przyporządkowująca globalny numer dla lokalnego węzła i w elemencie m,C(i, µ) - obliczona wartość współczynnika globalnego numeru węzła i dla stanu µ,H - lokalny hamiltonian dla elementu m,a norma 〈Ψµ|Ψµ〉 rozpisana po elementach wyraża się przez:
〈Ψµ|Ψµ〉 =m∑i=1
9∑k=1
9∑l=1
C(lg(i, k), µ)C(lg(i, l), µ)ES(k, l, i) (78)
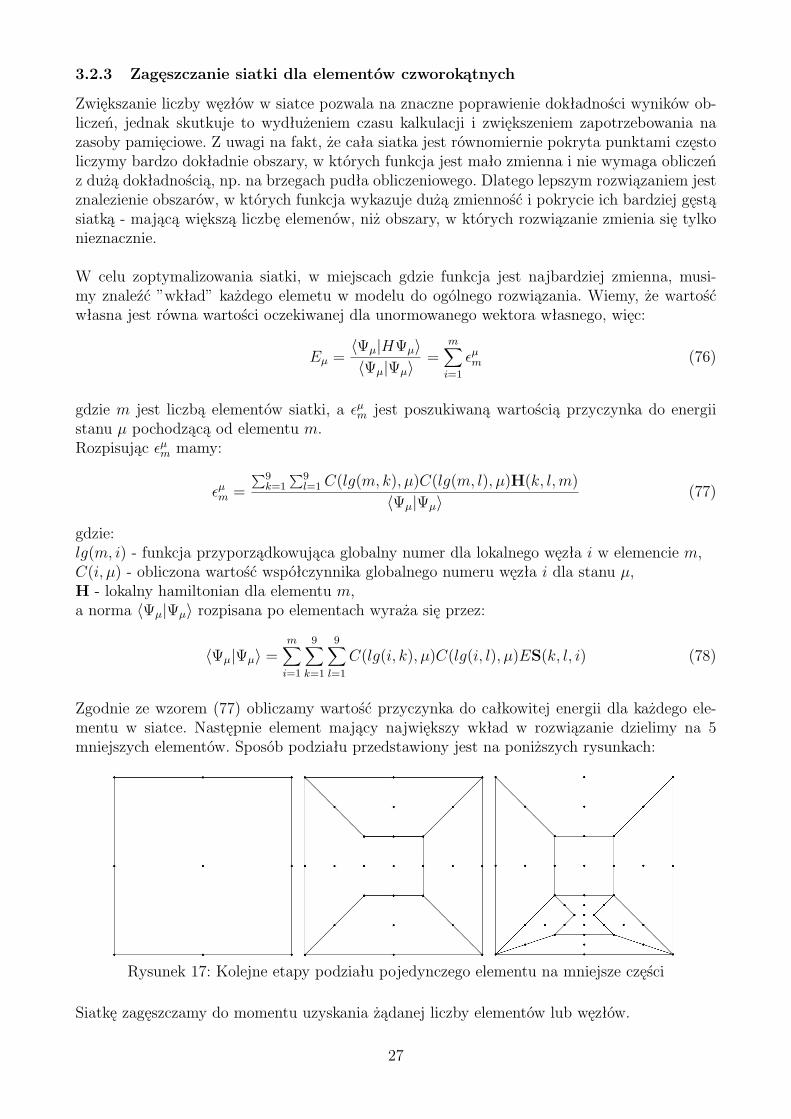
Zgodnie ze wzorem (77) obliczamy wartość przyczynka do całkowitej energii dla każdego ele-mentu w siatce. Następnie element mający największy wkład w rozwiązanie dzielimy na 5mniejszych elementów. Sposób podziału przedstawiony jest na poniższych rysunkach:
Rysunek 17: Kolejne etapy podziału pojedynczego elementu na mniejsze części
Siatkę zagęszczamy do momentu uzyskania żądanej liczby elementów lub węzłów.
27
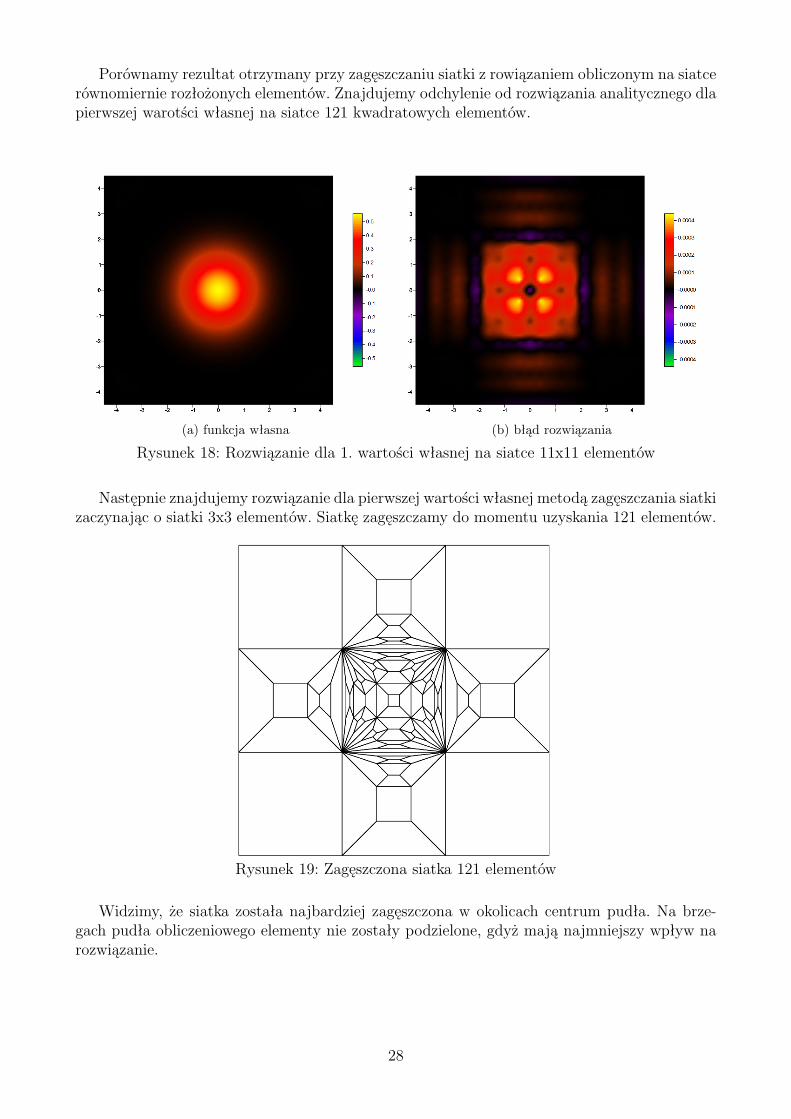
Porównamy rezultat otrzymany przy zagęszczaniu siatki z rowiązaniem obliczonym na siatcerównomiernie rozłożonych elementów. Znajdujemy odchylenie od rozwiązania analitycznego dlapierwszej warotści własnej na siatce 121 kwadratowych elementów.
(a) funkcja własna (b) błąd rozwiązania
Rysunek 18: Rozwiązanie dla 1. wartości własnej na siatce 11x11 elementów
Następnie znajdujemy rozwiązanie dla pierwszej wartości własnej metodą zagęszczania siatkizaczynając o siatki 3x3 elementów. Siatkę zagęszczamy do momentu uzyskania 121 elementów.
Rysunek 19: Zagęszczona siatka 121 elementów
Widzimy, że siatka została najbardziej zagęszczona w okolicach centrum pudła. Na brze-gach pudła obliczeniowego elementy nie zostały podzielone, gdyż mają najmniejszy wpływ narozwiązanie.
28

Sprawdźmy jak przedstawia się rozwiązanie dla powyższej siatki.
(a) funkcja własna (b) błąd rozwiązania
Rysunek 20: Rozwiązanie dla 1. wartości własnej na zagęszczonej siatce 121 elementów
Po zagęszczeniu siatki wartość energii dla pierwszej wartości własnej równa jest E=1.006,co w porównaniu do energii E=1.001 obliczonej dla siatki równomiernej, jest nieco gorszymwynikiem.Porównując wartości błędów obliczeń dla zagęszczonej oraz równomiernej siatki 121 elementówwidzimy, że poprzez zwiększenie liczby elementów w środkowym obszarze pudła obliczeniowego,uzyskaliśmy mniejszy błąd rozwiązania na tym obszarze. Natomiast na brzegach pudła, gdziepozostały elementy o stosunkowo dużej powierzchni, błąd rozwiązania jest znacząco większy wporównaniu do wyników dla siatki kwadratowych równomiernie rozłożonych elementów.
3.2.4 Wygładzanie siatki metodą Laplace’a
Optymalizując siatkę elementy dzielone są na coraz mniejsze części, co po kilku podziałach tegosamego elementu, może skutkować nieoptymalnymi elmentami o wydłużonym kształcie prowa-dzącymi do pogorszenia dokładności obliczeń. Sposobem na poprawienie jakości optymalizowa-nej siatki jest jej wygładzanie. Pozwala ono na uzyskanie elementów o bardziej optymalnychkształtach. Do wygładzania siatki użyjemy wygładzania Laplace’a.
29
Wygładzanie Laplace’a jest prostym algorytmem lokalnego wygładzania siatki. Algorytmwyznacza nowe położenie optymalizowanego węzła względem współrzędnych sąsiadujących znim węzłów.Funkcja kosztu dla wygładzania Laplace’a jest sumą kwadratów długości krawędzi mającychwspólny węzeł i przedstawia się następująco:
f(x, y) =k∑i=1
(‖vi‖L2
)2=
k∑i=1
((x− xi)2 + (y − yi)2
)(79)
gdzie k - liczba sąsiednich węzłów.Znalezienie minimum tej funkcji sprowadza się do znalezienia środka geometrycznego węzłówsąsiadujących z optymalizowanym:
∂f
∂x=∂f
∂y= 0 (80)
więc nowe współrzędne optymalizowanego węzła (x′, y′) obliczamy ze wzorów:
x′ =1k
k∑i=1
xi, y′ =1k
k∑i=1
yi (81)
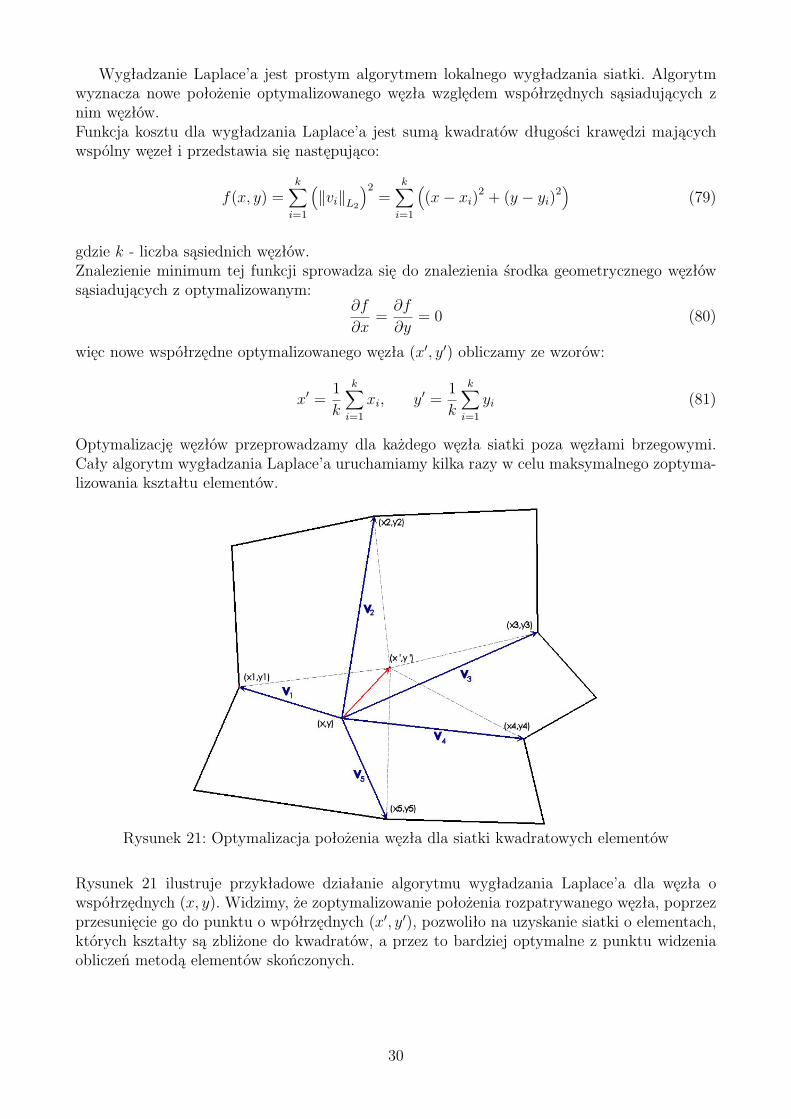
Optymalizację węzłów przeprowadzamy dla każdego węzła siatki poza węzłami brzegowymi.Cały algorytm wygładzania Laplace’a uruchamiamy kilka razy w celu maksymalnego zoptyma-lizowania kształtu elementów.
Rysunek 21: Optymalizacja położenia węzła dla siatki kwadratowych elementów
Rysunek 21 ilustruje przykładowe działanie algorytmu wygładzania Laplace’a dla węzła owspółrzędnych (x, y). Widzimy, że zoptymalizowanie położenia rozpatrywanego węzła, poprzezprzesunięcie go do punktu o wpółrzędnych (x′, y′), pozwoliło na uzyskanie siatki o elementach,których kształty są zbliżone do kwadratów, a przez to bardziej optymalne z punktu widzeniaobliczeń metodą elementów skończonych.
30
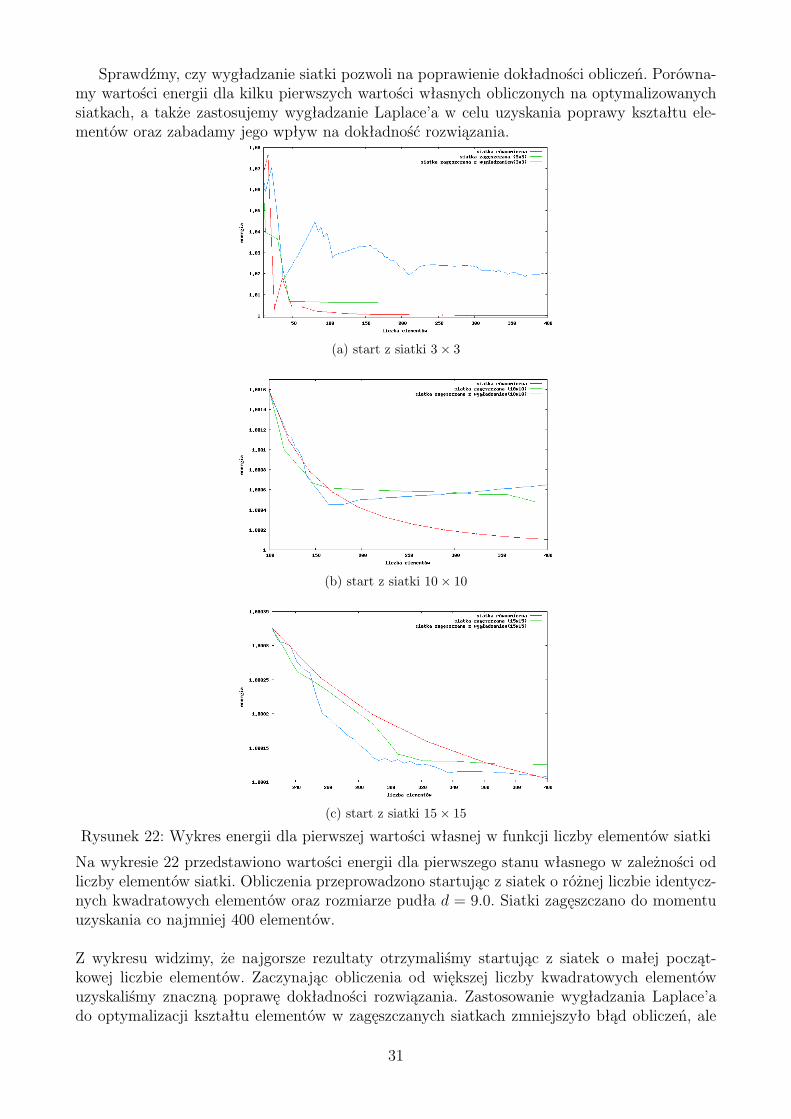
Sprawdźmy, czy wygładzanie siatki pozwoli na poprawienie dokładności obliczeń. Porówna-my wartości energii dla kilku pierwszych wartości własnych obliczonych na optymalizowanychsiatkach, a także zastosujemy wygładzanie Laplace’a w celu uzyskania poprawy kształtu ele-mentów oraz zabadamy jego wpływ na dokładność rozwiązania.
(a) start z siatki 3× 3
(b) start z siatki 10× 10
(c) start z siatki 15× 15
Rysunek 22: Wykres energii dla pierwszej wartości własnej w funkcji liczby elementów siatki
Na wykresie 22 przedstawiono wartości energii dla pierwszego stanu własnego w zależności odliczby elementów siatki. Obliczenia przeprowadzono startując z siatek o różnej liczbie identycz-nych kwadratowych elementów oraz rozmiarze pudła d = 9.0. Siatki zagęszczano do momentuuzyskania co najmniej 400 elementów.
Z wykresu widzimy, że najgorsze rezultaty otrzymaliśmy startując z siatek o małej począt-kowej liczbie elementów. Zaczynając obliczenia od większej liczby kwadratowych elementówuzyskaliśmy znaczną poprawę dokładności rozwiązania. Zastosowanie wygładzania Laplace’ado optymalizacji kształtu elementów w zagęszczanych siatkach zmniejszyło błąd obliczeń, ale
31
tylko w przypadku, gdy obliczenia były rozpoczynane od siatek o dużej liczbie elementów. Star-tując z siatki składającej się z 15× 15 elementów i stosując zagęszczanie uzyskaliśmy poprawędokładności obliczeń w stosunku do siatki równomiernej. Ponadto wygładzając tą siatkę do-datkowo zmniejszyliśmy błąd obliczeń. Jednak przewaga dokładności siatek zagęszczanych jestwidoczna tylko dla siatek skłądających się z mniej niż 350 elementów. Powyżej tej wartościstosując siatkę równomierną uzyskujemy dokładniejsze rozwiązanie.
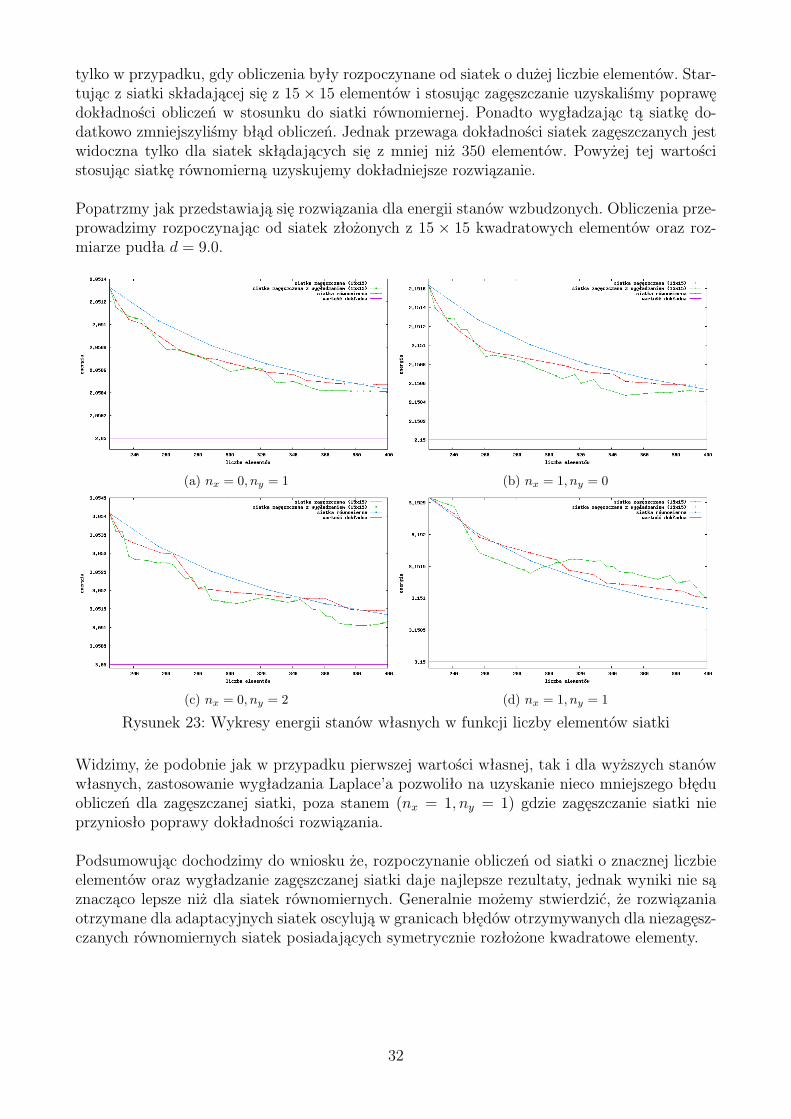
Popatrzmy jak przedstawiają się rozwiązania dla energii stanów wzbudzonych. Obliczenia prze-prowadzimy rozpoczynając od siatek złożonych z 15 × 15 kwadratowych elementów oraz roz-miarze pudła d = 9.0.
(a) nx = 0, ny = 1 (b) nx = 1, ny = 0
(c) nx = 0, ny = 2 (d) nx = 1, ny = 1
Rysunek 23: Wykresy energii stanów własnych w funkcji liczby elementów siatki
Widzimy, że podobnie jak w przypadku pierwszej wartości własnej, tak i dla wyższych stanówwłasnych, zastosowanie wygładzania Laplace’a pozwoliło na uzyskanie nieco mniejszego błęduobliczeń dla zagęszczanej siatki, poza stanem (nx = 1, ny = 1) gdzie zagęszczanie siatki nieprzyniosło poprawy dokładności rozwiązania.
Podsumowując dochodzimy do wniosku że, rozpoczynanie obliczeń od siatki o znacznej liczbieelementów oraz wygładzanie zagęszczanej siatki daje najlepsze rezultaty, jednak wyniki nie sąznacząco lepsze niż dla siatek równomiernych. Generalnie możemy stwierdzić, że rozwiązaniaotrzymane dla adaptacyjnych siatek oscylują w granicach błędów otrzymywanych dla niezagęsz-czanych równomiernych siatek posiadających symetrycznie rozłożone kwadratowe elementy.
32
3.3 Metoda elementów skończonych - elementy trójkątne
Tak jak poprzednio zastosujemy metodę elementów skończonych do znalezienia rozwiązanianiezależnego od czasu rówania Schroedinger’a(
H − E)
Ψ = 0 (82)
w podprzestrzeni Ω ⊂ R2, gdzie E ∈ σ(H).Przybliżonym rozwiązaniem równania (82) będzie funkcja falowa określona wzorem
Ψ(x, y) =∑i
ciφi(x, y) (83)
gdzie funkcje φi(x, y) stanowią bazę przestrzeni Ω, a wartości ci są liczbami rzeczywistymi,które znajdziemy rozwiązując równanie macierzowe
Hc = ESc (84)
w którym H to macierz Hamiltonianu, a S określa macierz przekrywania.W tym przypadku obszar Ω podzielimy na m trójkątnych elementów skończonych, w którychzdefiniujemy funkcje bazowe.
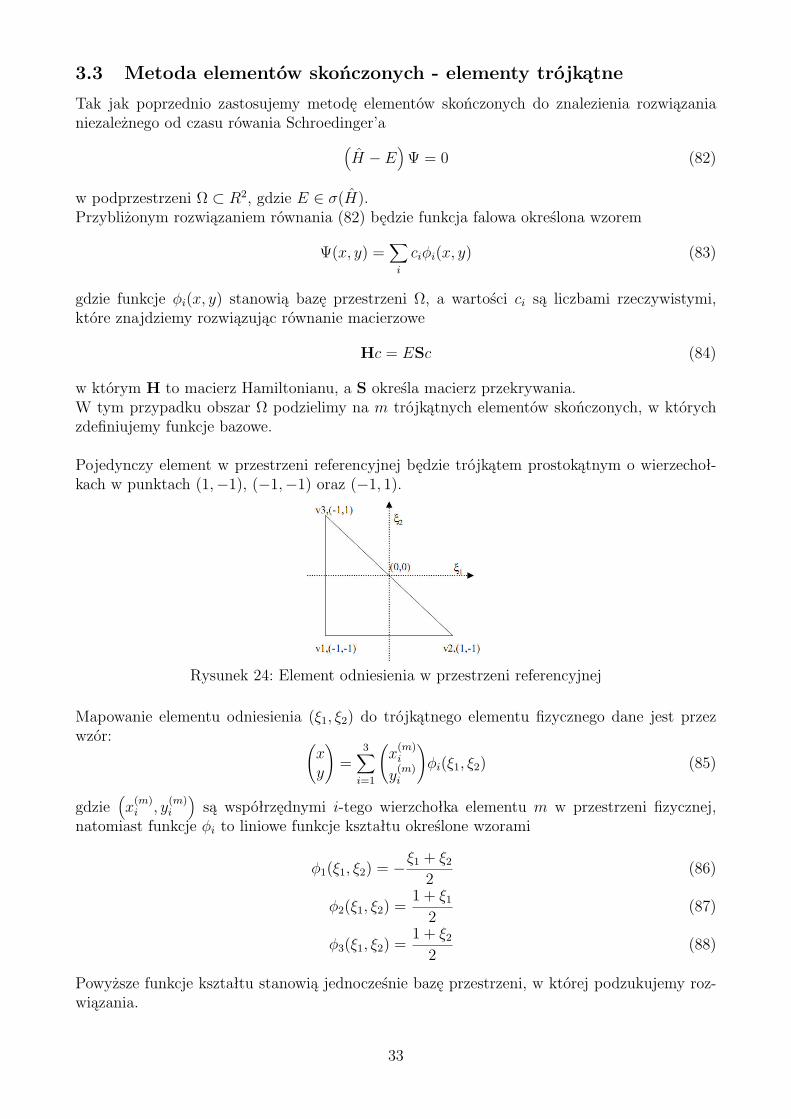
Pojedynczy element w przestrzeni referencyjnej będzie trójkątem prostokątnym o wierzechoł-kach w punktach (1,−1), (−1,−1) oraz (−1, 1).
Rysunek 24: Element odniesienia w przestrzeni referencyjnej
Mapowanie elementu odniesienia (ξ1, ξ2) do trójkątnego elementu fizycznego dane jest przezwzór: (
xy
)=
3∑i=1
(x
(m)i
y(m)i
)φi(ξ1, ξ2) (85)
gdzie(x
(m)i , y
(m)i
)są współrzędnymi i-tego wierzchołka elementu m w przestrzeni fizycznej,
natomiast funkcje φi to liniowe funkcje kształtu określone wzorami
φ1(ξ1, ξ2) = −ξ1 + ξ2
2(86)
φ2(ξ1, ξ2) =1 + ξ1
2(87)
φ3(ξ1, ξ2) =1 + ξ2
2(88)
Powyższe funkcje kształtu stanowią jednocześnie bazę przestrzeni, w której podzukujemy roz-wiązania.
33

Wykresy funkcji bazowych dla trójkątnego elementu referencyjnego przedstawiają się na-stępująco:
(a) φ1(ξ1, ξ2) (b) φ2(ξ1, ξ2) (c) φ3(ξ1, ξ2)
Rysunek 25: Funkcje bazowe elementu trójkątnego
Ponieważ mapowanie elementu odniesienia do fizycznego jest ściśle liniowe, a nie biliniowe jakw przypadku czworokątów, mamy pewność, że przy przechodzeniu z przestrzeni referencyjnejdo fizycznej zostanie zachowana równoległość ścian elementów.
Rysunek 26: Transformacja elementu z przestrzeni referencyjnej do fizycznej
Mając określone funkcje bazowe rozwiązania możemy zdefiniować wzór na obliczenie lokalnejmacierzy sztywności dla elementu m, który zgodnie ze wzorem (57) przedstawia się następująco:
Hmij = −1
2
∫Ωm∇φi(x, y) · ∇φj(x, y)dxdy +
12
∫Ωm
φi(x, y)φj(x, y)(x2 + y2)dxdy (89)
natomiast lokalna macierz przekrywania określona jest zależnością
Smij =∫
Ωmφi(x, y)φj(x, y)dxdy. (90)
Przenosząc powyższe równania do przestrzeni referencyjnej otrzymujemy odpowiednio
Hmij =− 1
2
∫ 1
−1dξ1
∫ ξ1
−1dξ2J
(m)(ξ1, ξ2)∇gi(ξ1, ξ2) · ∇gj(ξ1, ξ2)+
12
∫ 1
−1dξ1
∫ ξ1
−1dξ2J
(m)gi(ξ1, ξ2)gj(ξ1, ξ2)(x(ξ1, ξ2)2 + y(ξ1, ξ2)2
) (91)
orazSmij =
∫ 1
−1dξ1
∫ ξ1
−1dξ2J
(m)gi(ξ1, ξ2)gj(ξ1, ξ2) (92)
Wartość wyrażenia ∇gi(ξ1, ξ2) · ∇gj(ξ1, ξ2) znajdziemy zgodnie ze wzorem (61).
34

Natomiast jakobian J (m) określony jest wzorem
J (m) =∂x
∂ξ1
∂y
∂ξ2− ∂y
∂ξ1
∂x
∂ξ2=
14
[(−x1 + x2)(−y1 + y3)− (−y1 + y2)(−x1 + x3)] (93)
skąd wynika, że
J (m) =∆
∆ref
(94)
gdzie ∆ref jest polem trójkąta w przestrzeni referencyjnej i ma stałą wartością równą ∆ref = 2,a ∆ jest polem trójkąta w przestrzeni fizycznej i jest równa
∆ =12
∣∣∣∣∣∣∣1 x1 y1
1 x2 y2
1 x3 y3
∣∣∣∣∣∣∣ (95)
Jak widzimy wartość jakobianu zależy jedynie od pola powierzchni trójkąta w przestrzeni fi-zycznej, a nie od położenia, jak to miało miejsce w przypadku elementów czworokątnych.
Ponieważ we wzorach (91) oraz (92) górna granica całkowania po zmiennej ξ2 jest zmienna,do scałkowania posłużymy się ekonomiczną kwadraturą Gauss’a dla trójkąta odniesienia [1].Jest to sześciopunktowa kwadratura pozwalająca na scałkowanie wielomianów 4. stopnia, któ-rej punkty i wagi określone są następująco:
współrzędna ξ1 współrzędna ξ2 waga
-0.108103018168070 -0.108103018168070 0.446763179356022
-0.108103018168070 -0.783793963663860 0.446763179356022
-0.783793963663860 -0.108103018168070 0.446763179356022
-0.816847572980458 -0.816847572980458 0.219903487310644
-0.816847572980458 0.633695145960918 0.219903487310644
0.633695145960918 -0.816847572980458 0.219903487310644
Tabela 1: Wartości współrzędnych i wag ekonomicznej kwadratury Gauss’a
Graficzne przedstawienie rozkładu punktów ekonomicznej kawdratury Gauss’a w trójkącie od-niesienia przedstawia poniższy wykres.
Rysunek 27: Rozkład punktów kwadratury
35

Całki we wzorach (91) oraz (92) liczymy numerycznie według zależności:∫ 1
−1dξ1
∫ ξ1
−1dξ2g(ξ1, ξ2) =
∑k
wkg(ξk1 , ξk2 ) (96)
gdzie wk - wagi kwadratury, ξk1 ,ξk2 - węzły kwadratury, g(ξk1 , ξk2 ) - funkcja podcałkowa.
Mając określone metodę całkowania numerycznego oraz wzory na lokalne macierze, dalsze ob-liczenia przeprowadzamy analogicznie do przypadku z elementami czworokątnymi, czyli znaj-dujemy lokalne macierze dla każdego elementu, które następnie składamy w macierze globalne,kolejnym krokiem jest wprowadzenie warunków brzegowych, a na końcu znalezienie szukanychwspółczynników ci oraz określenie rozwiązania w każdym punkcie siatki zgodnie ze wzorem (83).
36
3.3.1 Pierwsze wyniki
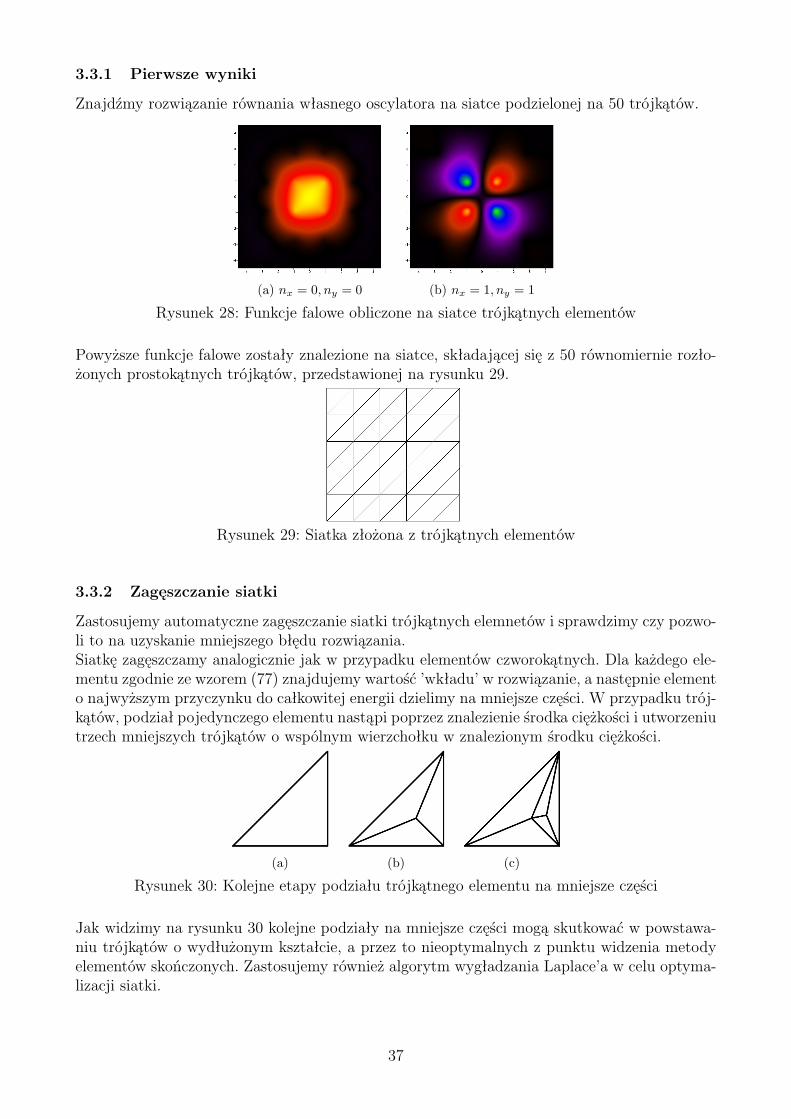
Znajdźmy rozwiązanie równania własnego oscylatora na siatce podzielonej na 50 trójkątów.
(a) nx = 0, ny = 0 (b) nx = 1, ny = 1
Rysunek 28: Funkcje falowe obliczone na siatce trójkątnych elementów
Powyższe funkcje falowe zostały znalezione na siatce, składającej się z 50 równomiernie rozło-żonych prostokątnych trójkątów, przedstawionej na rysunku 29.
Rysunek 29: Siatka złożona z trójkątnych elementów
3.3.2 Zagęszczanie siatki
Zastosujemy automatyczne zagęszczanie siatki trójkątnych elemnetów i sprawdzimy czy pozwo-li to na uzyskanie mniejszego błędu rozwiązania.Siatkę zagęszczamy analogicznie jak w przypadku elementów czworokątnych. Dla każdego ele-mentu zgodnie ze wzorem (77) znajdujemy wartość ’wkładu’ w rozwiązanie, a następnie elemento najwyższym przyczynku do całkowitej energii dzielimy na mniejsze części. W przypadku trój-kątów, podział pojedynczego elementu nastąpi poprzez znalezienie środka ciężkości i utworzeniutrzech mniejszych trójkątów o wspólnym wierzchołku w znalezionym środku ciężkości.
(a) (b) (c)
Rysunek 30: Kolejne etapy podziału trójkątnego elementu na mniejsze części
Jak widzimy na rysunku 30 kolejne podziały na mniejsze części mogą skutkować w powstawa-niu trójkątów o wydłużonym kształcie, a przez to nieoptymalnych z punktu widzenia metodyelementów skończonych. Zastosujemy również algorytm wygładzania Laplace’a w celu optyma-lizacji siatki.
37
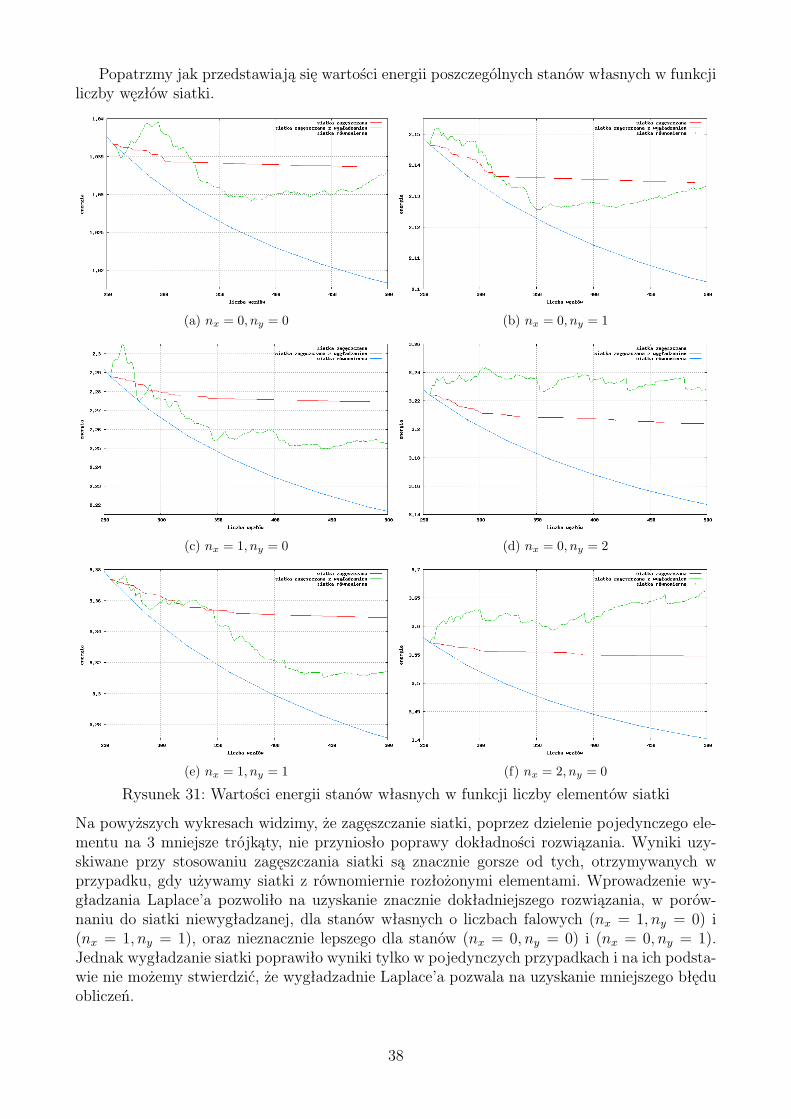
Popatrzmy jak przedstawiają się wartości energii poszczególnych stanów własnych w funkcjiliczby węzłów siatki.
(a) nx = 0, ny = 0 (b) nx = 0, ny = 1
(c) nx = 1, ny = 0 (d) nx = 0, ny = 2
(e) nx = 1, ny = 1 (f) nx = 2, ny = 0
Rysunek 31: Wartości energii stanów własnych w funkcji liczby elementów siatki
Na powyższych wykresach widzimy, że zagęszczanie siatki, poprzez dzielenie pojedynczego ele-mentu na 3 mniejsze trójkąty, nie przyniosło poprawy dokładności rozwiązania. Wyniki uzy-skiwane przy stosowaniu zagęszczania siatki są znacznie gorsze od tych, otrzymywanych wprzypadku, gdy używamy siatki z równomiernie rozłożonymi elementami. Wprowadzenie wy-gładzania Laplace’a pozwoliło na uzyskanie znacznie dokładniejszego rozwiązania, w porów-naniu do siatki niewygładzanej, dla stanów własnych o liczbach falowych (nx = 1, ny = 0) i(nx = 1, ny = 1), oraz nieznacznie lepszego dla stanów (nx = 0, ny = 0) i (nx = 0, ny = 1).Jednak wygładzanie siatki poprawiło wyniki tylko w pojedynczych przypadkach i na ich podsta-wie nie możemy stwierdzić, że wygładzadnie Laplace’a pozwala na uzyskanie mniejszego błęduobliczeń.
38
Zagęszczanie przez podział rekurencyjny
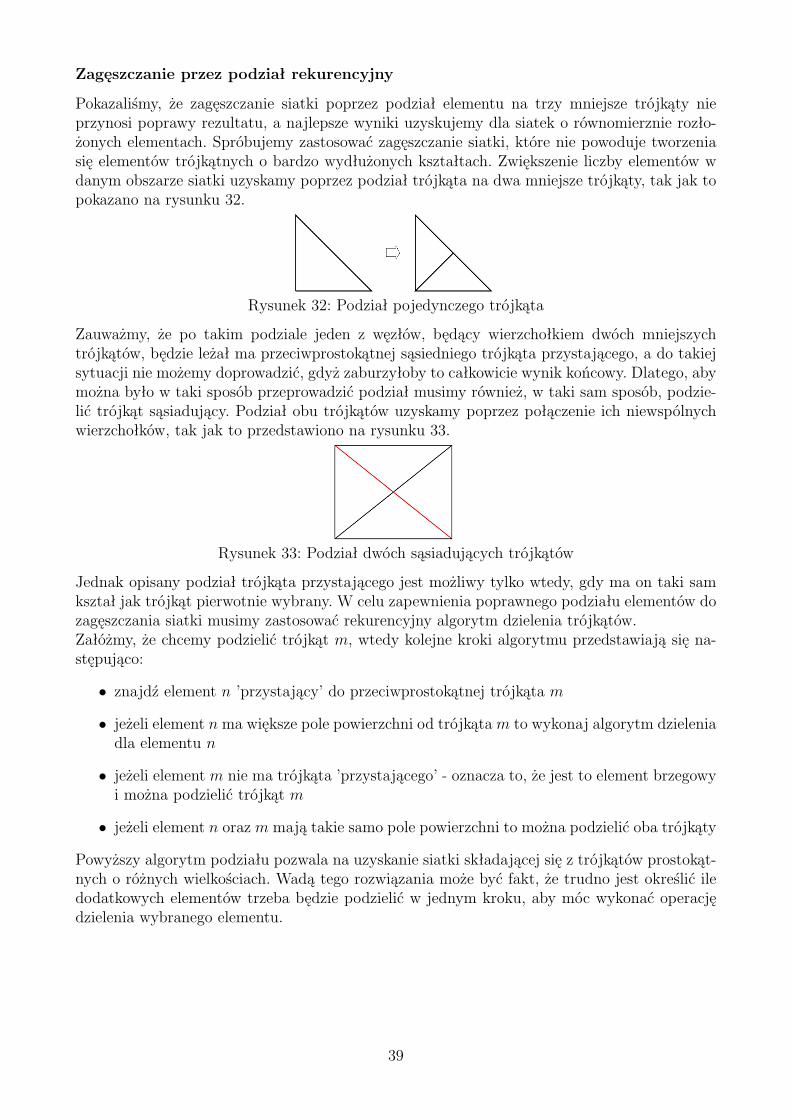
Pokazaliśmy, że zagęszczanie siatki poprzez podział elementu na trzy mniejsze trójkąty nieprzynosi poprawy rezultatu, a najlepsze wyniki uzyskujemy dla siatek o równomierznie rozło-żonych elementach. Spróbujemy zastosować zagęszczanie siatki, które nie powoduje tworzeniasię elementów trójkątnych o bardzo wydłużonych kształtach. Zwiększenie liczby elementów wdanym obszarze siatki uzyskamy poprzez podział trójkąta na dwa mniejsze trójkąty, tak jak topokazano na rysunku 32.
Rysunek 32: Podział pojedynczego trójkąta
Zauważmy, że po takim podziale jeden z węzłów, będący wierzchołkiem dwóch mniejszychtrójkątów, będzie leżał ma przeciwprostokątnej sąsiedniego trójkąta przystającego, a do takiejsytuacji nie możemy doprowadzić, gdyż zaburzyłoby to całkowicie wynik końcowy. Dlatego, abymożna było w taki sposób przeprowadzić podział musimy również, w taki sam sposób, podzie-lić trójkąt sąsiadujący. Podział obu trójkątów uzyskamy poprzez połączenie ich niewspólnychwierzchołków, tak jak to przedstawiono na rysunku 33.
Rysunek 33: Podział dwóch sąsiadujących trójkątów
Jednak opisany podział trójkąta przystającego jest możliwy tylko wtedy, gdy ma on taki samkształ jak trójkąt pierwotnie wybrany. W celu zapewnienia poprawnego podziału elementów dozagęszczania siatki musimy zastosować rekurencyjny algorytm dzielenia trójkątów.Załóżmy, że chcemy podzielić trójkąt m, wtedy kolejne kroki algorytmu przedstawiają się na-stępująco:
• znajdź element n ’przystający’ do przeciwprostokątnej trójkąta m
• jeżeli element n ma większe pole powierzchni od trójkąta m to wykonaj algorytm dzieleniadla elementu n
• jeżeli element m nie ma trójkąta ’przystającego’ - oznacza to, że jest to element brzegowyi można podzielić trójkąt m
• jeżeli element n oraz m mają takie samo pole powierzchni to można podzielić oba trójkąty
Powyższy algorytm podziału pozwala na uzyskanie siatki składającej się z trójkątów prostokąt-nych o różnych wielkościach. Wadą tego rozwiązania może być fakt, że trudno jest określić iledodatkowych elementów trzeba będzie podzielić w jednym kroku, aby móc wykonać operacjędzielenia wybranego elementu.
39
Kryterium wyboru elementu do podziału jest identyczne jak w przypadku elementów czwo-rokątnych. Znajdujemy rozwiązanie na rzadkiej siatce, następnie zgodnie ze wzorem (77) ob-liczamy wartość przyczynka do energii każdego elementu. Znajdujemy element o najwyższejwartości wkładu w rozwiązanie i uruchamiamy dla niego algorytm podziału opisany powy-żej. Po przeprowadzeniu podziału siatki ponownie rozwiązujemy równanie własne dla większejliczby elementów. Cały proces powtarzamy do momentu uzyskania żądanej liczby węzłów siatki.
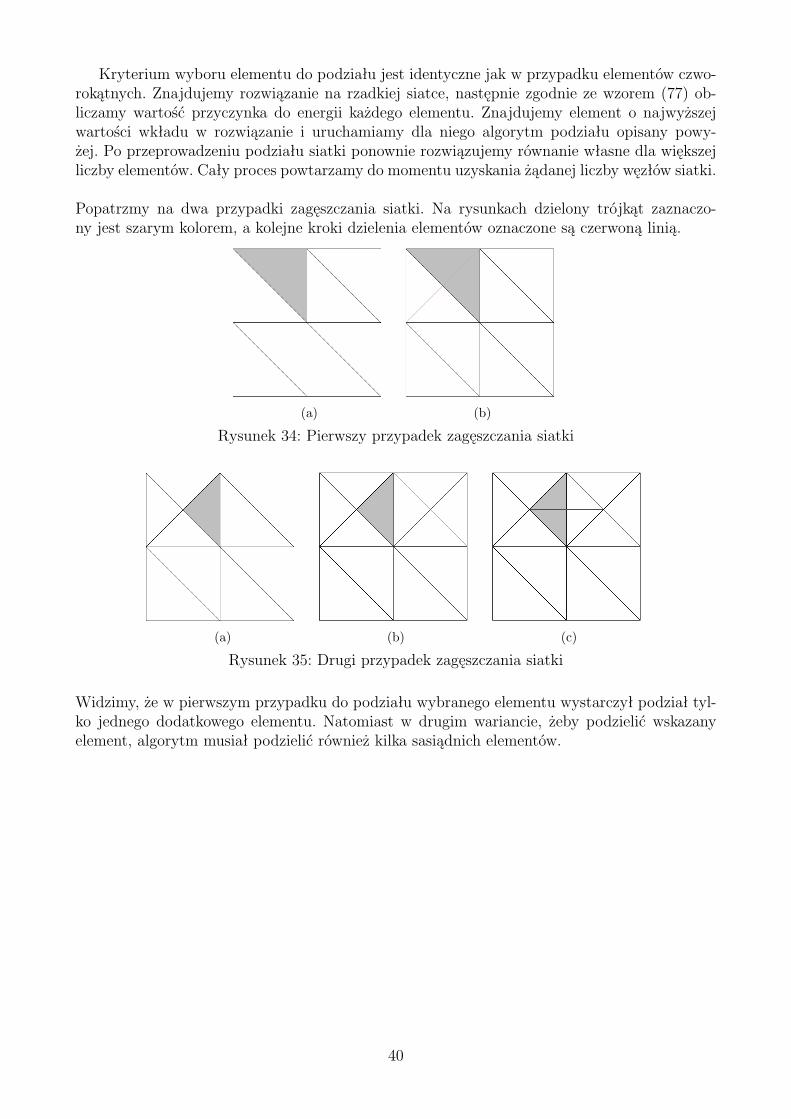
Popatrzmy na dwa przypadki zagęszczania siatki. Na rysunkach dzielony trójkąt zaznaczo-ny jest szarym kolorem, a kolejne kroki dzielenia elementów oznaczone są czerwoną linią.
(a) (b)
Rysunek 34: Pierwszy przypadek zagęszczania siatki
(a) (b) (c)
Rysunek 35: Drugi przypadek zagęszczania siatki
Widzimy, że w pierwszym przypadku do podziału wybranego elementu wystarczył podział tyl-ko jednego dodatkowego elementu. Natomiast w drugim wariancie, żeby podzielić wskazanyelement, algorytm musiał podzielić również kilka sasiądnich elementów.
40
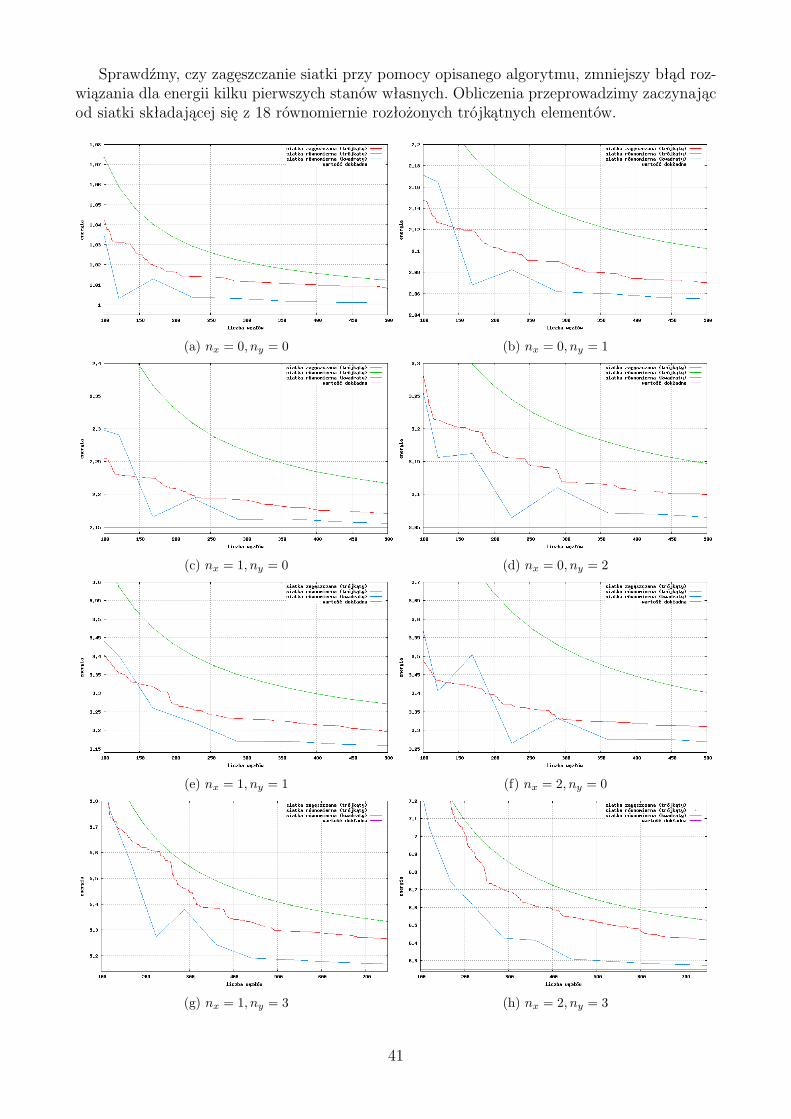
Sprawdźmy, czy zagęszczanie siatki przy pomocy opisanego algorytmu, zmniejszy błąd roz-wiązania dla energii kilku pierwszych stanów własnych. Obliczenia przeprowadzimy zaczynającod siatki składającej się z 18 równomiernie rozłożonych trójkątnych elementów.
(a) nx = 0, ny = 0 (b) nx = 0, ny = 1
(c) nx = 1, ny = 0 (d) nx = 0, ny = 2
(e) nx = 1, ny = 1 (f) nx = 2, ny = 0
(g) nx = 1, ny = 3 (h) nx = 2, ny = 3
41
Na powyższych wykresach widzimy, że po zastosowaniu zagęszczania rekurencyjnego, dzielą-cego elementy na mniejsze trójkąty prostokątne, dla wszystkich wyników, uzyskaliśmy znacznąpoprawę dokładności obliczeń energii poszczególnych stanów, w porównaniu do trójkątnej siatkirównomiernej mającej taką samą liczbę węzłów. Dla niektórych stanów dokładność rozwiąza-nia poprawiła się o ponad połowę. Dla porównania przedstawione są również wartości energiiposzczególnych stanów własnych oscylatora znalezionych na siatce złożonej z kwadratowych ele-mentów skończonych. Z uwagi na fakt, że w elemencie trójkątnym mamy trzy węzły, natomiastw czworokątnym mamy dziewięć węzłów, porównanie dokładności obliczeń poszczególnych sia-tek przeprowadzono w funkcji całkowitej liczby węzłów siatki. Widzimy, że wyniki otrzymanedla zagęszczanej rekurencyjnie siatki trójkątnej są jednak gorsze od tych dla równomiernej siat-ki czworokątnej.
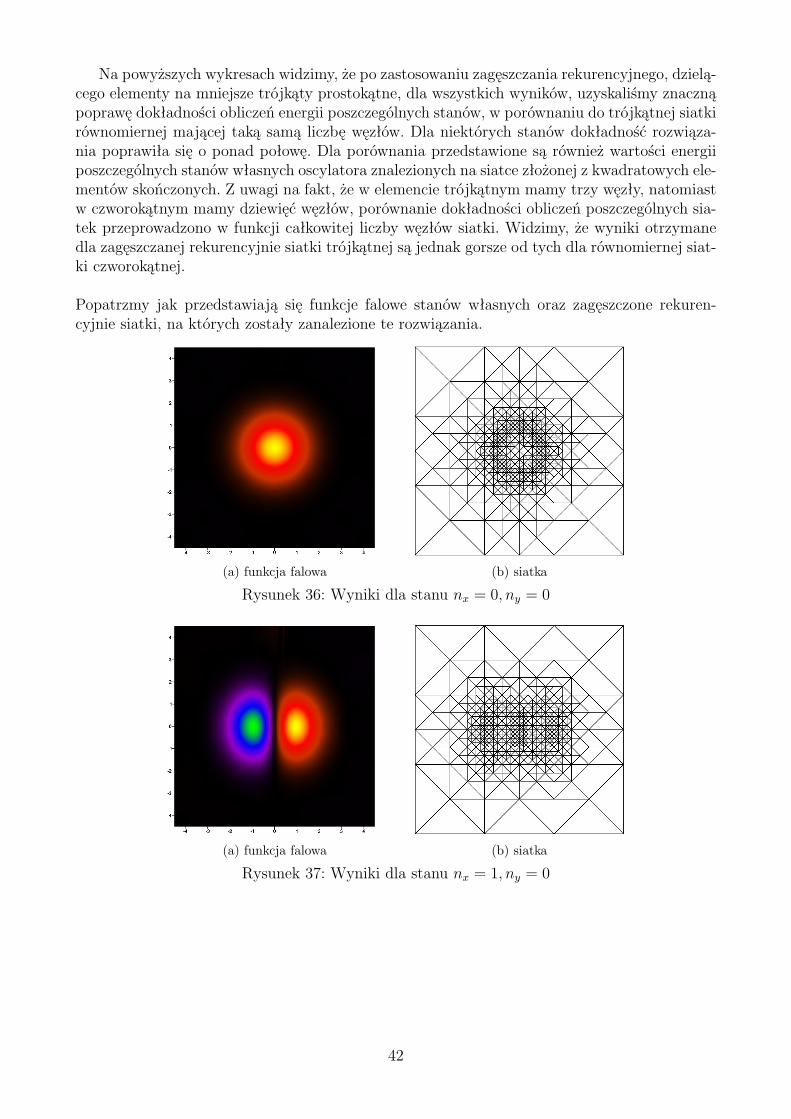
Popatrzmy jak przedstawiają się funkcje falowe stanów własnych oraz zagęszczone rekuren-cyjnie siatki, na których zostały zanalezione te rozwiązania.
(a) funkcja falowa (b) siatka
Rysunek 36: Wyniki dla stanu nx = 0, ny = 0
(a) funkcja falowa (b) siatka
Rysunek 37: Wyniki dla stanu nx = 1, ny = 0
42
(a) funkcja falowa (b) siatka
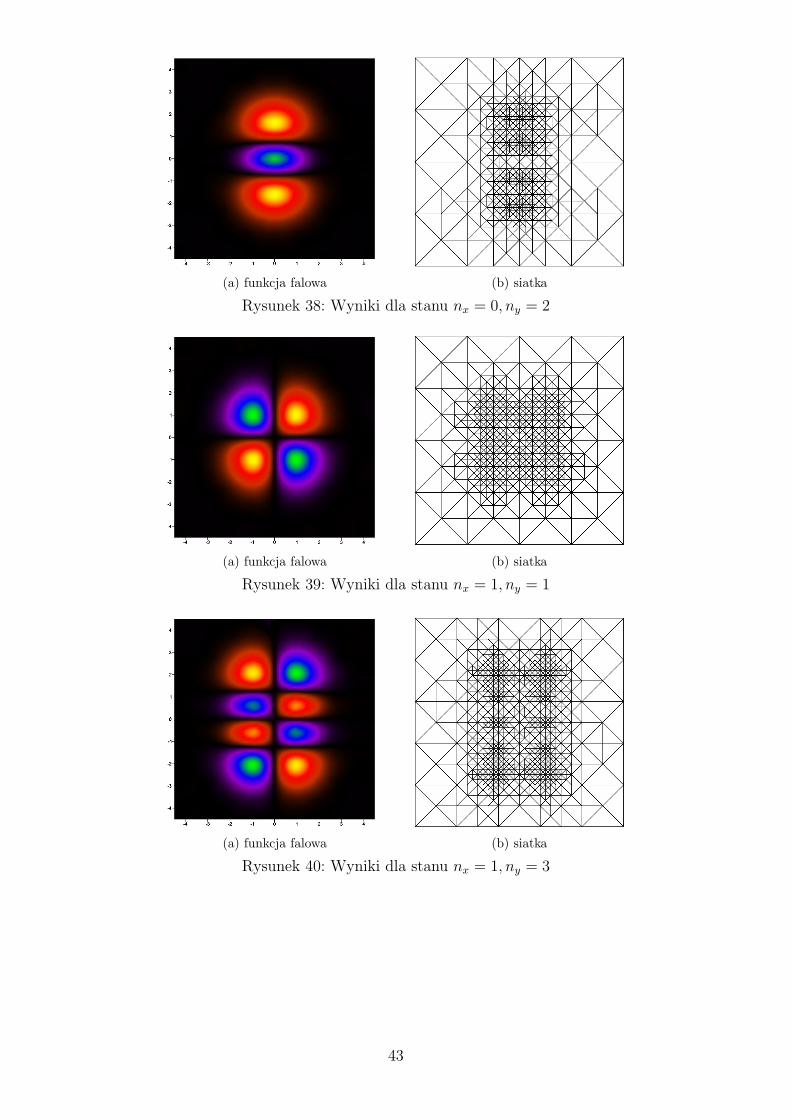
Rysunek 38: Wyniki dla stanu nx = 0, ny = 2
(a) funkcja falowa (b) siatka
Rysunek 39: Wyniki dla stanu nx = 1, ny = 1
(a) funkcja falowa (b) siatka
Rysunek 40: Wyniki dla stanu nx = 1, ny = 3
43

(a) funkcja falowa (b) siatka
Rysunek 41: Wyniki dla stanu nx = 2, ny = 3
Widzimy, że dla wszystkich stanów własnych oscylatora siatki zostały poprawnie zagęszczo-ne w miejscach, które mają największy wpływ na rozwiązanie. Natomiast na brzegach pudłaobliczeniowego na obszarach, w których funkcje są praktycznie stałe, pozostały elementy o du-żym polu powierzchni i o niewielkim zagęszczeniu. Zauważmy, że dla stanu podstawowego siatkajest najgęstsza na okręgu wokół centrum oscylatora.
4 Podsumowanie i wnioski
Podsumowanie
Na początku pracy, dla wprowadzenia metody elementów skończonych dla niezależnego odczasu równania Schroedingera, rozważono jednowymiarowy kwantowy oscylator harmoniczny.W pierwszej aplikacji metody wykorzystano liniowe funkcje kształtu dla jednowymiarowychelementów skończonych oraz zbadano dokładność dla siatki równoodległych węzłów. Prze-prowadzono również optymalizacje rozmiaru elementów. W kolejnym kroku opisano metodęelementów skończonych dla równania własnego dwuwymiarowego oscylatora harmonicznego.W pierwszym rachunku przyjęto elementy kwadratowe oraz dziewięć bikwadratowych funkcjikształtu na element. Następnie przeprowadzono optymalizację rozwiązań odpowiednio przez wa-riacyjny dobór rozmiaru pudła obliczeniowego. Dla dyskusji zoptymalizowanych położeń węzłówdla stanów wzbudzonych wprowadzono zaburzenie obrotowej symetrii potencjału dla zniesie-nia degeneracji stanów wzbudzonych oscylatora ze względu na moment pędu. Opisano metodyzagęszczania siatki składającej sie z elementów czworokątnych oraz wygładzania siatki meto-dą Laplace’a. Porównano dokładność wyników uzyskanych przy zagęszczaniu i wygładzaniasiatki z wynikami uzyskiwanymi dla siatek równomiernych. Następnie określono sposób rozwią-zania problemu własnego oscylatora przy pomocy metody elementów trójkątnych z liniowymifunkcjami kształtu. Przedstawiono dwie metody zagęszczania siatek trójkątnych. Porównanodokładność rozwiązań dla różnych strategii zagęszczania trójkątnej siatki z wynikami otrzy-manymi dla siatek złożonych z elementów czworokątnych przy różnym rzędzie użytych funkcjikształtu. Ostatecznie pokazano kilka wykresów funkcji falowych oraz zoptymalizowanych siatektrójkątnych.
44

Wnioski
Pokazano, że wyniki uzyskiwane przy użyciu algorytmu automatycznego zagęszczania siatkielementów czworokątnych mają podobną dokładność, co rezultaty dla siatki złożonej z równo-miernie rozłożonych kwadratów. Wyniki uzyskiwane w obu przypadkach były obarczone po-dobnym błędem obliczeń. Jednak dla problemów potencjałów bardziej złożonych niż oscyla-tor harmoniczny, bardziej obiecującym wydaje się być algorytm automatycznego zagęszczaniasiatki. Nieco prostszą w implementacji okazała się metoda elementów skończonych z trójkątny-mi elementami, ponieważ w pojedynczym elemencie zastosowano trzy węzły i liniowe funkcjekształtu. W przypadku użycia funkcji liniowych dla trójkątnych elementów, optymalizacja siatkijest znacznie ważniejsza niż dla bardziej elastycznych funkcji bikwadratowych stosowanych dlaelementów czworokątnych. Celem trzeciego rozdziału było wyznaczenie optymalnego rozkładuelementów dla stanu podstawowego i stanów wzbudzonych. Wiemy, że potencjał harmonicznyjest gładki, natomiast o lokalnej wartości energii decyduje energia kinetyczna proporcjonalnado kwadratu gradientu funkcji falowej. Uzyskane wyniki faktycznie wskazują, że optymalnyrozklad węzłów mapuje obszary najsilniejszej zmienności funkcji falowej.
Literatura
[1] P. Solin, Partial Differential Equations and the Finite Element Method.
[2] O.C. Zienkiewicz, Finite Element Method, its basis & fundamentals.
[3] R.Grzymkowski, A.Kapusta, I. Nowak, D. Słota, Metody Numeryczne, Zagadnienia Brze-gowe.
[4] S. Bednarek, Mechanika kwantowa.
[5] A. Quarteroni, Numerical mathematics.
45