Wpływ tarcia na serwomechanizmy - eia.pg.edu.pl · Zjawisko to znane jest od bardzo dawna. ......
20
Wpływ tarcia na serwomechanizmy
Transcript of Wpływ tarcia na serwomechanizmy - eia.pg.edu.pl · Zjawisko to znane jest od bardzo dawna. ......

Wpływ tarcia na
serwomechanizmy

Zakłócenia oddziałujące na serwomechanizm
Siły potencjalne/grawitacji,
Tarcie,
Zmienny moment bezwładności,
Zmienny moment obciążenia

Tarcie
Zjawisko to znane jest od bardzo dawna.
Badał je już Leonardo da Vinci,
Pionierem współczesnej tribologii był: Guillaume Amontons, który w 1699 roku opublikował swoje badania dotyczące zjawiska tarcia. Sformułował na ich podstawie prawa, które
Charles Augustin de Coulomb potwierdził w roku 1781, że
siła tarcia jest proporcjonalna do siły nacisku normalnego N oraz właściwości powierzchni :
T= N*μ
T - siła tarcia (tzw. Tarcie Coulomba), N - siła nacisku, μ - współczynnik tarcia,
Tarcie tak zdefiniowane nazwano tarciem Coulomba

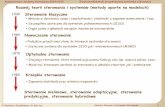
Wyróżnia się kilka składowych tarcia:
- tarcie statyczne,
- tarcie Coulomba,
- tarcie wiskotyczne,
- efekt Stribecka
tarcie statyczne
Tarcie Coulomba
tarcie wiskotyczna
Efekt Stribecka
Prędkość Stribecka

Statyczne modele tarcia – w różnych obiektach istotne są różne
składniki siły tarcia
- tarcie statyczne,
- tarcie Coulomba,
- tarcie wiskotyczne,
- efekt Stribecka
- tarcie Coulomba,
- tarcie statyczne,
- tarcie Coulomba,
- tarcie wiskotyczne,
- tarcie Coulomba,
- tarcie wiskotyczne,
w różnych obiektach istotne są różne składniki siły tarcia

Model tarcia statyczny
0.),sgn()*)((
0,/)( 2)(
vdlavvFeFFF
vdlaFvF
v
v
v
csc
s
fs
Nieciągłość !

Rodzaje błędów w serwomechanizmach i powodujące je
składowe tarcia
Zadanie Rodzaj błędu Dominujący czynnik tarcia
Regulacja błędy ustalone lub cykl
graniczny Tarcie statyczne
Śledzenie ze zmianą kierunku ruchu
utrata płynności ruchu Tarcie statyczne
Śledzenie z małą prędkością ruchu
drgania cierne (Stick-slip oscillators)
Tarcie statyczne i efekt Stribecka
Śledzenie z dużą prędkością ruchu
duże błędy ustalone lepkie środowisko smarów, tarcie
wiskotyczne

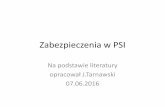
Śledzenie trajektorii zadanej (położenie kątowe w funkcji czasu) bez
udziału tarcia (po lewej) i z tarciem (po prawej) –
wartość zadana- zielony, wartość mierzona – niebieski
Drgania cierne
Zadany ruch: 1rad w ciągu 1.5s
Utrata płynności ruchu przy śledzeniu trajektorii z małą prędkością

Drgania cierne
0 0.05 0.1 0.15 0.2 0.25-0.5
0
0.5
1
1.5
2
2.5predkosc katowa
czas [sek]
pre
dk
os
c [
rad
/s]
0 0 .05 0.1 0.15 0.2 0.250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9moment Te
czas [sek]
mo
me
nt
Te
[N
*m
]
0 0 .02 0.04 0.06 0.08 0.1 0.120
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05polozenie teta
czas [sek]
teta
[ra
d]
prędkość moment
położenie

Błąd ustalony
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.05
0.1
0.15
0.2
0.25polozenie teta
czas [sek]
teta
[ra
d]
0 0 .02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-2
0
2
4
6
8
10
12
14
16predkosc katowa
czas [sek]
pre
dk
os
c [
rad
/s]
0 0 .02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1moment elektromagnetyczny
czas [sek]
mo
me
nt
Te
[N
*m
]
położenie prędkość
moment
Dlaczego
tak jest?

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25polozenie teta
czas [sek]
teta
[ra
d]
Cykl graniczny
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-4
-2
0
2
4wyjscie z regulatora predkosci
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5wejscie na regulator pradu
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-40
-20
0
20
40wyjscie z regulatora pradu
Moment zadany
położenie
Cykl graniczny

0 0.5 1 1.5 2 2.5 3-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5polozenie teta
czas [sek]
teta
[ra
d]
0 .2 0.3 0.4 0.5 0.6 0.7 0.8 0.90.25
0.3
0.35
0.4
0.45
0.5polozenie teta
czas [sek]
teta
[ra
d]
Wpływ tarcia na pracę serwomechanizmu przy śledzeniu trajektorii ze
zmianą kierunku ruchu
utrata płynności ruchu,
drgania cierne

0 0.5 1 1.5 2 2.5 3-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5predkosc katowa
czas [sek]
pre
dk
os
c [
rad
/s]
0 0 .5 1 1.5 2 2.5 3-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1moment Te
czas [sek]
mo
me
nt
Te
[N
*m
]
utrata płynności ruchu,
drgania cierne
Wpływ tarcia na pracę serwomechanizmu przy śledzeniu trajektorii ze
zmianą kierunku ruchu
moment
prędkość

śledzenie trajektorii z dużą prędkością
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.2
0
0.2
0.4
0.6
0.8
1
1.2polozenie katowe
czas [sek]
teta
[ra
d]
0 0 .02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9moment elektromagnetyczny
czas [sek]
mo
me
nt
Te
[N
*m
]
0 0 .001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0.01
0.02polozenie katowe
czas [sek]
teta
[ra
d]
bez tarcia
z tarciem
Tarcie wiskotyczne powoduje błędy ustalone

Kompensacja wpływu tarcia
1. W latach 40-ych w żyroskopach zastosowano mechaniczny
wibrator, wprowadza on dodatkową siłę, która wprawia układ w
ruch zanim efekt sklejenia (tarcie statyczne) się pojawi.
Współcześnie do sygnału sterującego można dodawać sygnał o
wysokiej częstotliwości.
2. W układach regulacji o strukturze kaskadowej można dodać
sygnał kompensujący tarcie (oparty na modelu tarcia) w pętli
wewnętrznej (regulacji prądu). Do realizacji konieczny jest
dokładny pomiar prędkości, bez opóźnienia pomiarowego.
Estymacja siły/momentu tarcia na podstawie modelu.
3. W zadaniach śledzenia znanej trajektorii można stosować
predykcję tarcia i częściowo kompensować w układach typu
feedforward.

Kompensacja tarcia z obserwatorem momentu/siły
tarcia
Serwo z tarciem
Liniowy regulator
położenia
Obserwator/model
tarcia

Układ sterowania serwomechanizmu z generatorem trajektorii
(modelem wzorcowym, FF)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2polozenie zadane
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.2
0
0.2
0.4
0.6prekosc zadana
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.1
-0.05
0
0.05
0.1przyspieszenie zadane

Kompensacja wpływu tarcia w układzie sterowania z generatorem
trajektorii i modelem tarcia
Zadany prąd (moment)
Model tarcia Generator trajektorii
Model silnika
(fragment)
Prędkość zadana
Dodatkowy moment
kompensujący tarcie
Fragment układu serwo z poprzedniego slajdu z dołożonym modelem tarcia

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18polozenie katowe
czas[sek]
polo
zenie
[rad]
kaskada
z modelem wzorcowym
teta zadana
0.1 0.15 0.2 0.25 0.3
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
polozenie katowe
czas[sek]
polo
zenie
[rad]
kaskada
z modelem wzorcowym
teta zadana
Kompensacja z generatorem trajektorii i z modelem tarcia

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18polozenie katowe
czas[sek]
polo
zenie
[rad]
kaskada
z modelem wzorcowym
teta zadana
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1przebieg tarcia
czas[sek]
taricie
[N
*m]
tarcie wzorcowe
tarcie rzeczywiste
Kompensacja z generatorem trajektorii i z modelem tarcia