Projektowanie Systemów Elektromechanicznych GK2... · • Zębate: – Proste; ... Mocowanie...
45
Projektowanie Systemów Elektromechanicznych Przekładnie dr inż. G. Kostro
Transcript of Projektowanie Systemów Elektromechanicznych GK2... · • Zębate: – Proste; ... Mocowanie...
Projektowanie Systemów
Elektromechanicznych
Przekładnie
dr inż. G. Kostro
Przekładnie
• Zębate:
– Proste;
– Złożone;
– Ślimakowe;
– Planetarne.
• Cięgnowe:
– Pasowe;
– Łańcuchowe;
– Linowe.
Przekładnie
• Hydrauliczne:
– Hydrostatyczne;
– Hydrokinetyczne – podstawą działania jest wykorzystanie energii kinetycznej płynu. Stosowane w automatycznych skrzyniach biegów. Charakteryzują się stosunkowo niską sprawnością i możliwością przeciążenia bez niebezpieczeństwa przeciążenia układu napędowego.
Przekładnie zębate
Zalety:
• Łatwość wykonania;
• Stosunkowo małe gabaryty;
• Stosunkowo cicha praca – przy
odpowiednim smarowaniu;
• Duża równomierność pracy;
• Wysoka sprawność (do 98%)
Przekładnie zębate
Wady:
• Stosunkowo niskie przełożenie dla
pojedynczego stopnia;
• Sztywna geometria;
• Brak naturalnego zabezpieczenia przed
przeciążeniem.
Przekładnie zębate - podział
Ze względu na umiejscowienie zazębienia
• Zazębienie zewnętrzne;
• Zazębienie wewnętrzne.
Rodzaj ruchu:
• Przekładnia obrotowa;
• Przekładnia liniowa.
Przekładnie zębate - podział
• Wzajemne usytuowanie osi obrotu
• Przekładnia czołowa:
– Walcowa;
– Stożkowa.
• Przekładnia śrubowa:
– Ślimakowa;
– Hiperboloidalna.
Przekładnia prosta
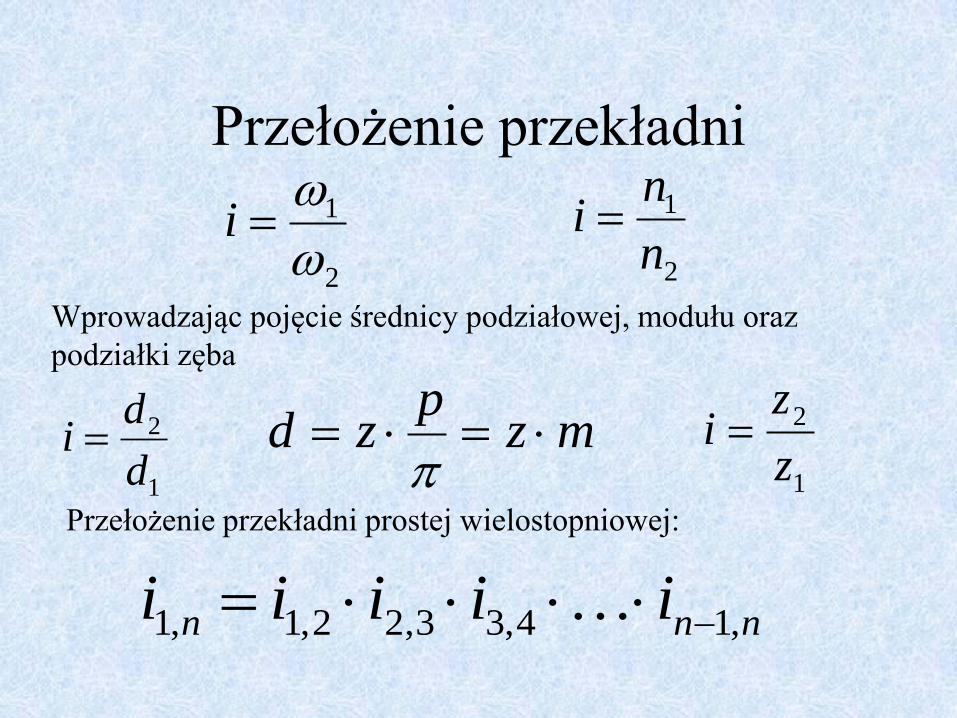
Przełożenie przekładni
2
1
i
2
1
n
ni
1
2
d
di
Wprowadzając pojęcie średnicy podziałowej, modułu oraz
podziałki zęba
mzp
zd 1
2
z
zi
Przełożenie przekładni prostej wielostopniowej:
nnn iiiii ,14,33,22,1,1
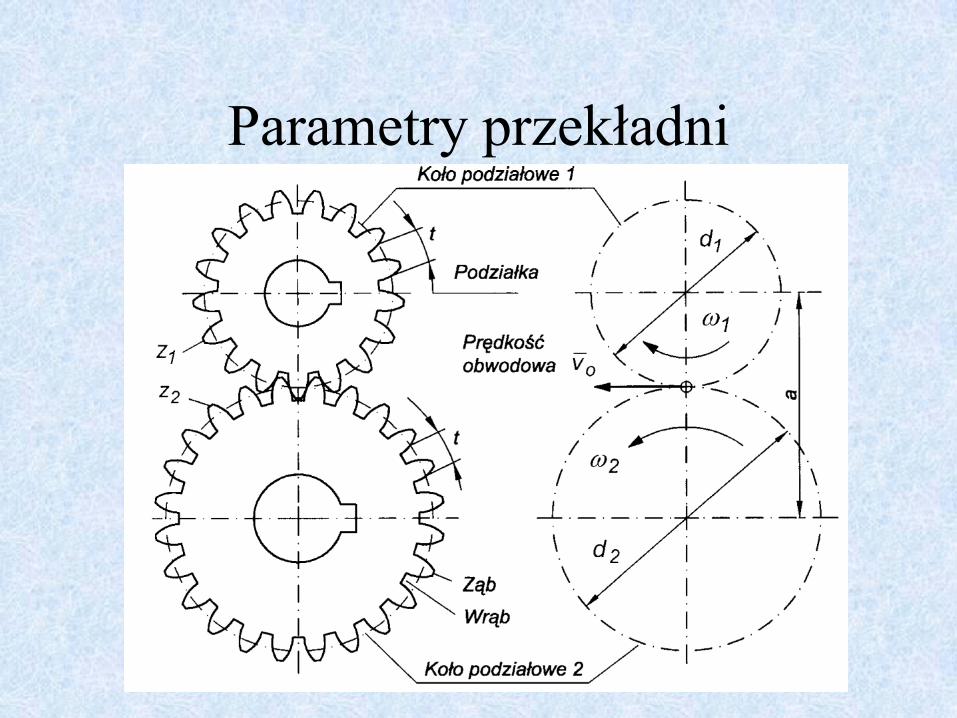
Parametry przekładni
Przekładnia ślimakowa
Przekładnia ślimakowa ma zastosowanie
wszędzie tam, gdzie istotne są zarówno
duże przełożenie jak i możliwość
napędzania jedynie z jednej strony przy
samohamowności z drugiej.
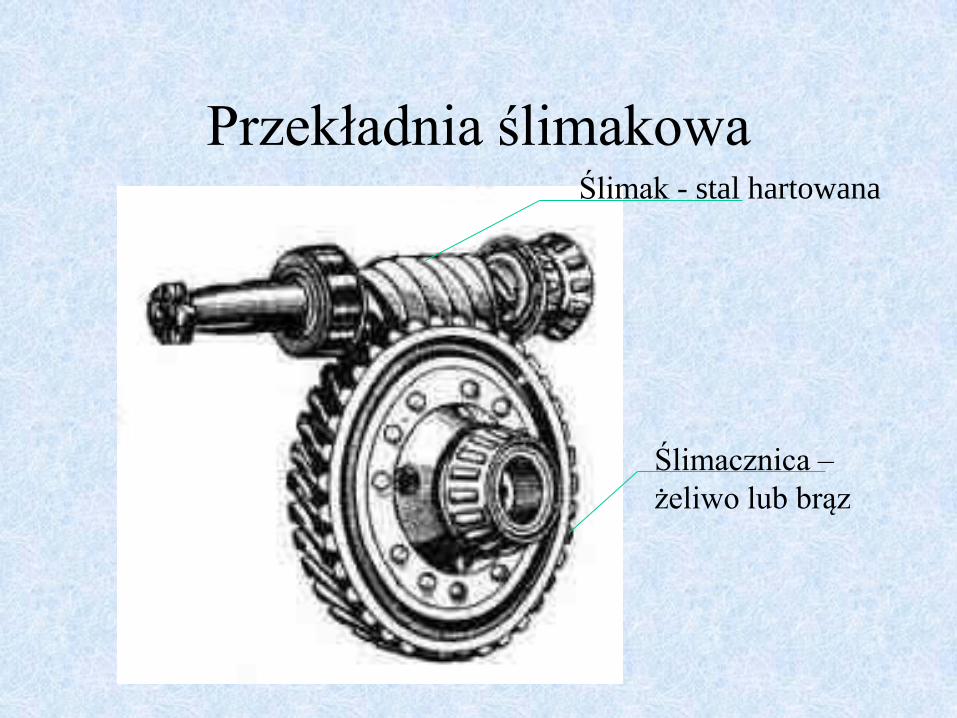
Przekładnia ślimakowa Ślimak - stal hartowana
Ślimacznica –
żeliwo lub brąz
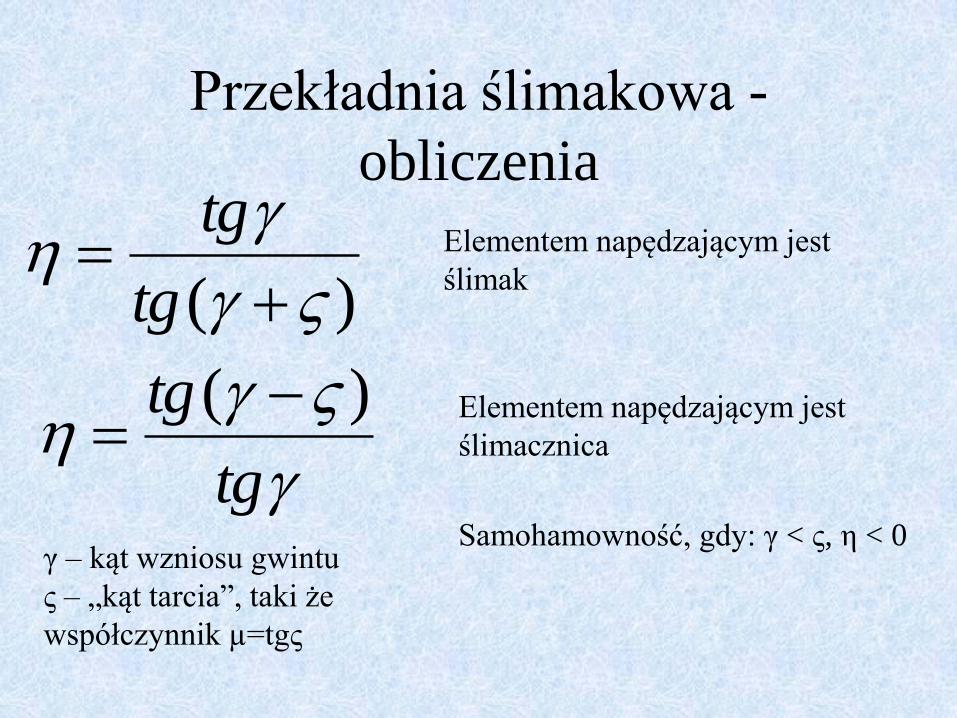
Przekładnia ślimakowa -
obliczenia
)(
tg
tg
tg
tg )(
γ – kąt wzniosu gwintu
ς – „kąt tarcia”, taki że
współczynnik µ=tgς
Elementem napędzającym jest
ślimak
Elementem napędzającym jest
ślimacznica
Samohamowność, gdy: γ < ς, η < 0
Zastosowanie
• Mechanizm naciągu strun w instrumentach
strunowych, takich jak gitara, skrzypce, pianino;
• Przełożenia w napędach mechanicznych, np.
ruchomy stół do frezarki, podajniki taśmowe;
• Redukcja obrotów, np. układ napędowy kosiarek;
• Samohamowne przełożenia mechanizmów małej
mocy, np. elektrycznie opuszczane szyby w
samochodzie,
• napęd wycieraczek samochodowych
Przekładnia planetarna
(obiegowa)
• Koło zębate wewnętrzne (centralne) z
uzębieniem zewnętrznym;
• Satelity połączone jarzmem (2, 3 lub 4);
• Koło zębate zewnętrzne z uzębieniem
wewnętrznym.
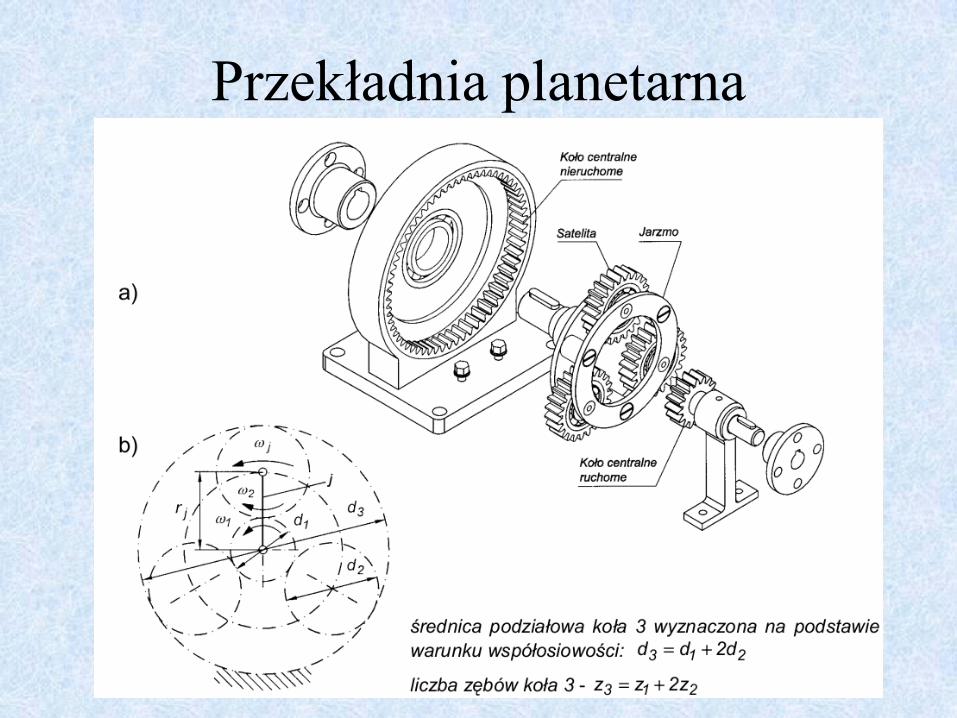
Przekładnia planetarna
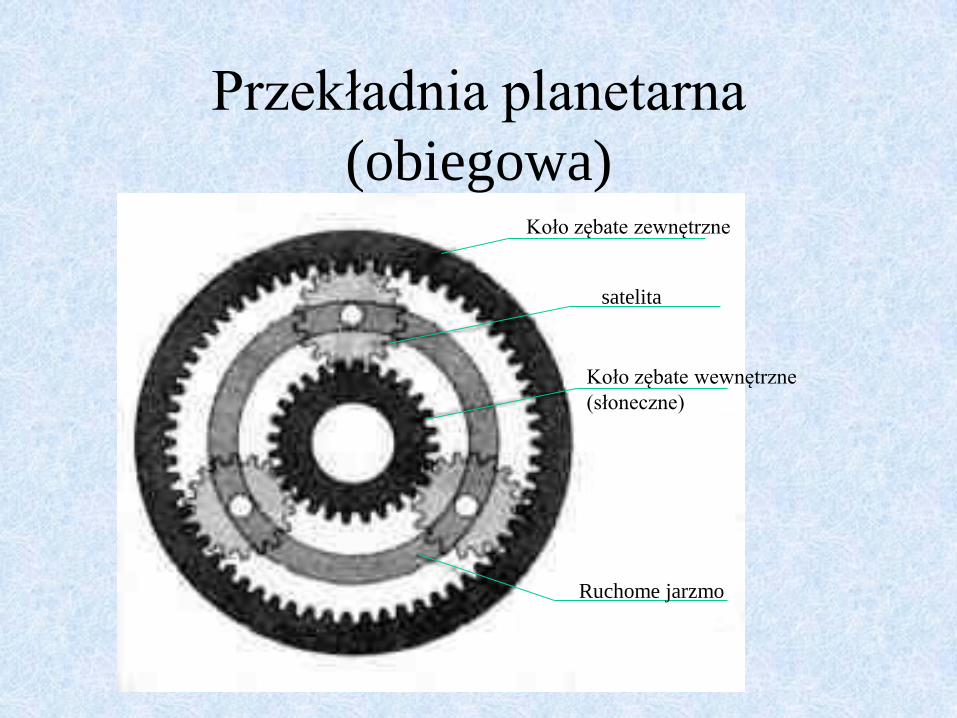
Przekładnia planetarna
(obiegowa) Koło zębate zewnętrzne
satelita
Koło zębate wewnętrzne
(słoneczne)
Ruchome jarzmo
Przekładnia planetarna -
przełożenie
Prędkość liniową „V” w ruchu płaskim
dowolnego punktu „A” ciała poruszającego
się ruchem obrotowym z prędkością kątową
„ω” względem nieruchomego w danej chwili
punktu „B” można policzyć jako iloczyn
prędkości kątowej „ω” i odległości „r”
pomiędzy punktami „A” i „B”
• Metoda chwilowego środka obrotu
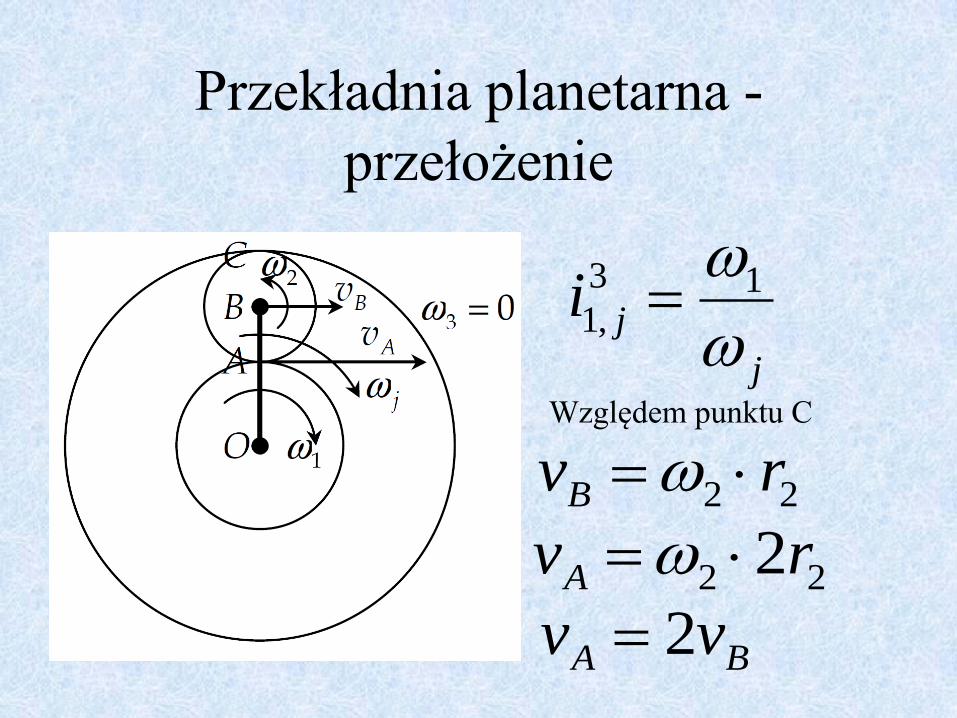
Przekładnia planetarna -
przełożenie
j
ji
13
,1
Względem punktu C
22 rvB
22 2rvA
BA vv 2
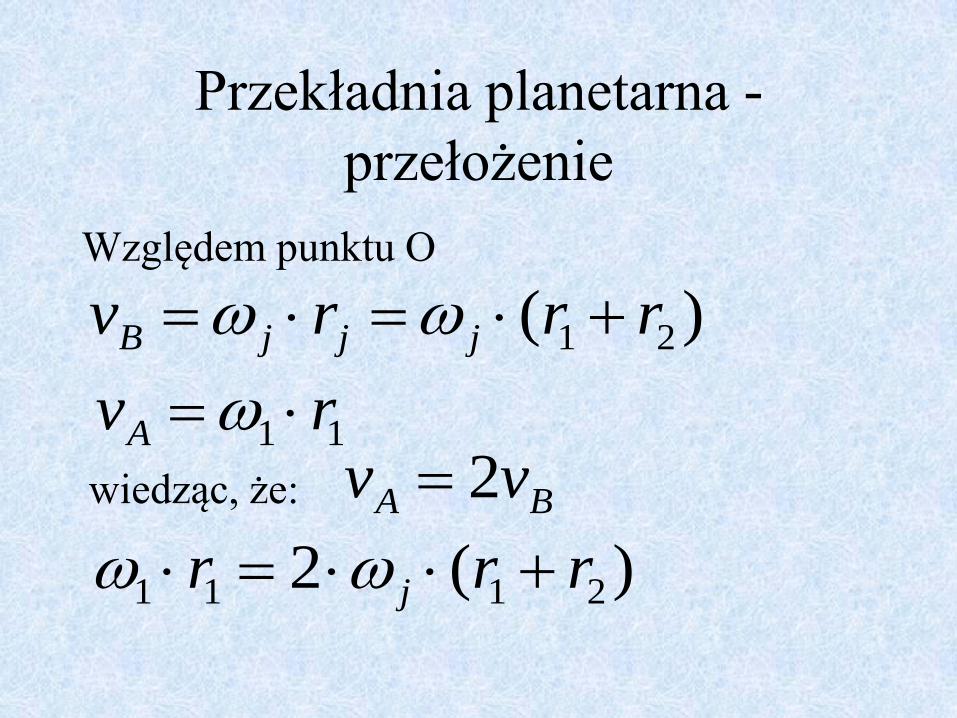
Przekładnia planetarna -
przełożenie
Względem punktu O
)( 21 rrrv jjjB
11 rvA wiedząc, że: BA vv 2
)(2 2111 rrr j
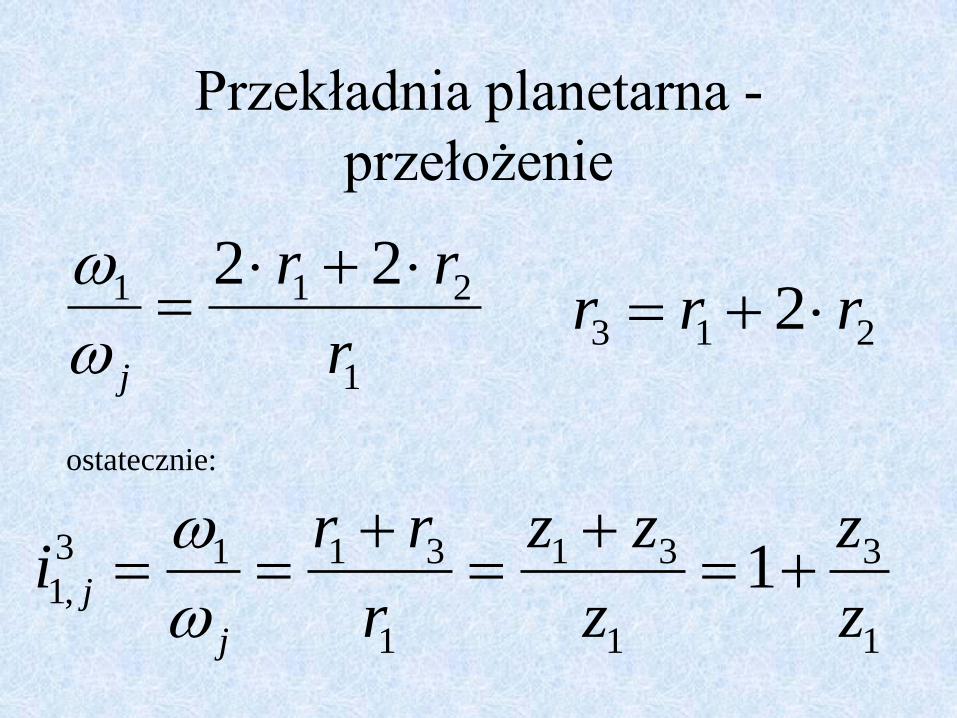
Przekładnia planetarna -
przełożenie
1
211 22
r
rr
j
213 2 rrr
1
3
1
31
1
3113
,1 1z
z
z
zz
r
rri
j
j
ostatecznie:
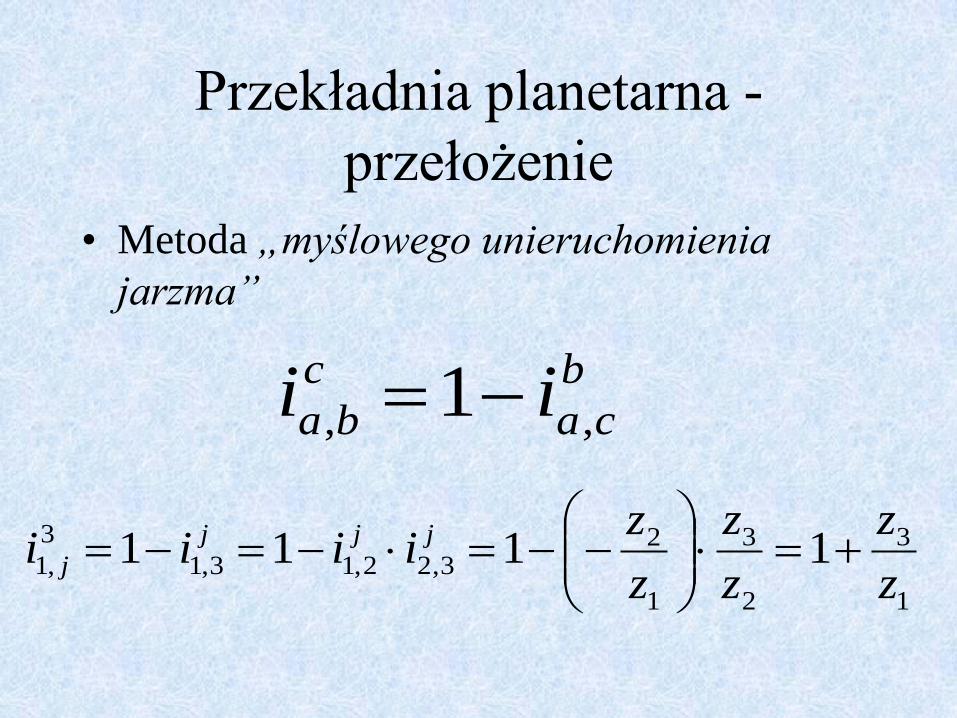
Przekładnia planetarna -
przełożenie
• Metoda „myślowego unieruchomienia
jarzma”
b
ca
c
ba ii ,, 1
1
3
2
3
1
23,22,13,1
3
,1 1111z
z
z
z
z
ziiii jjj
j
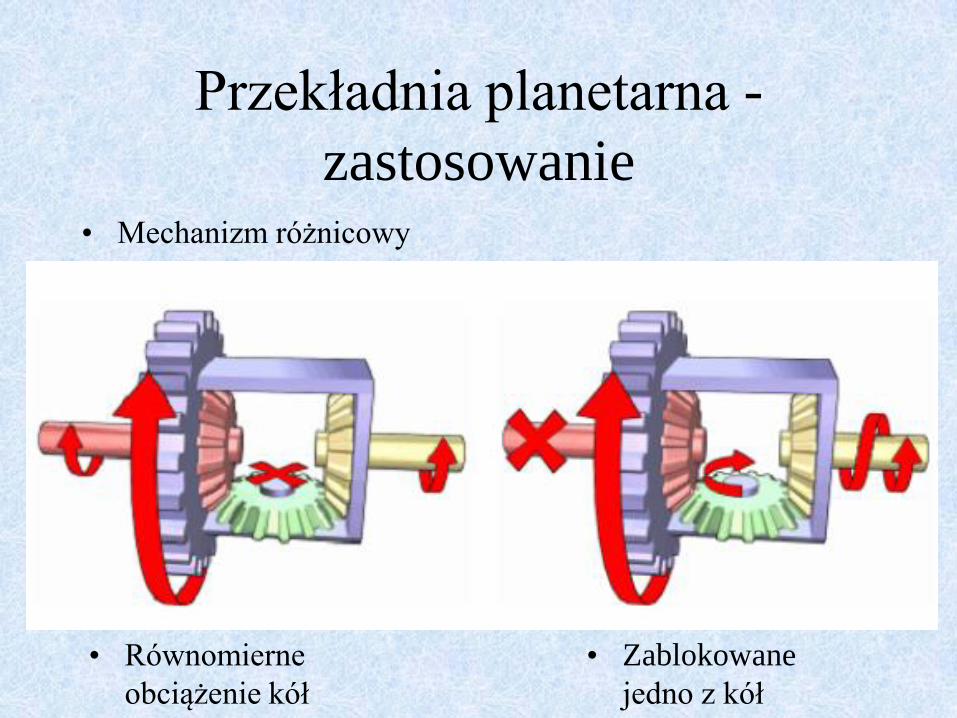
Przekładnia planetarna -
zastosowanie • Mechanizm różnicowy
• Równomierne
obciążenie kół
• Zablokowane
jedno z kół
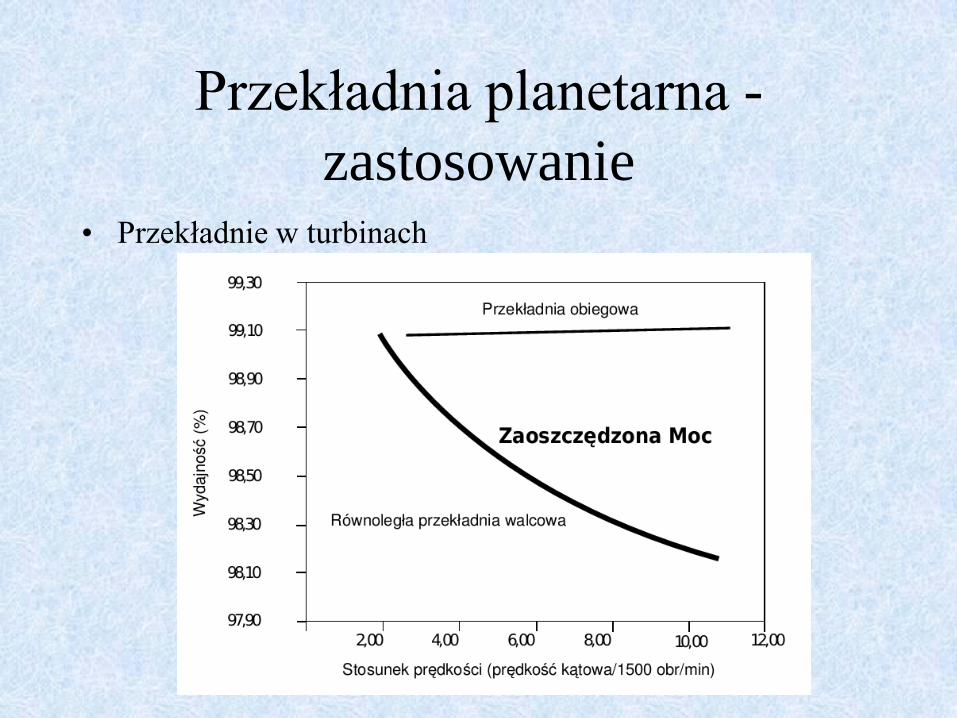
Przekładnia planetarna -
zastosowanie • Przekładnie w turbinach
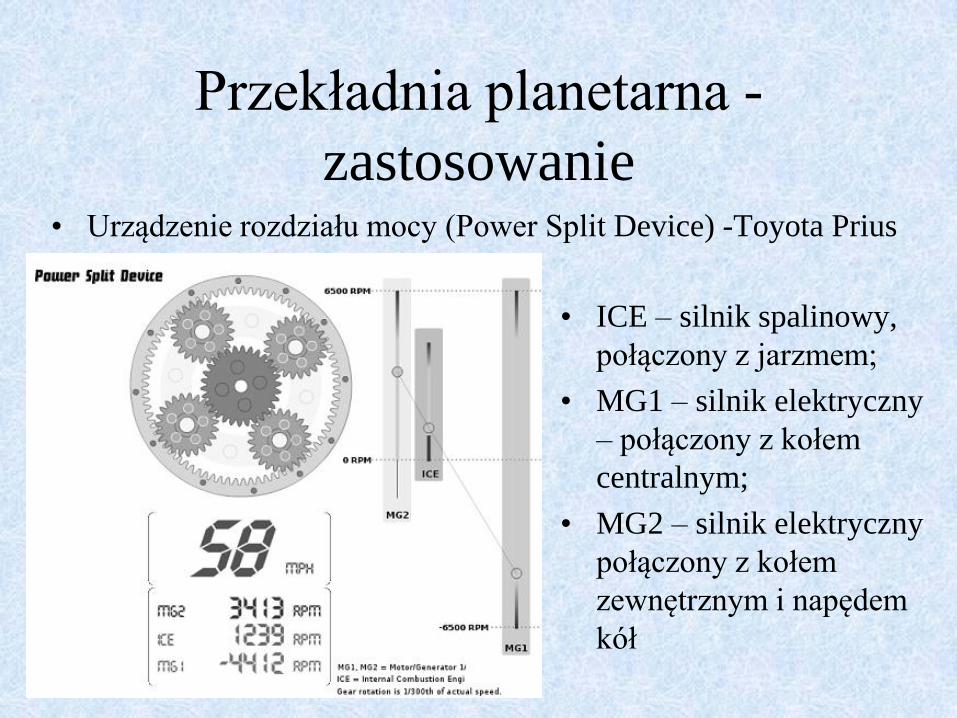
Przekładnia planetarna -
zastosowanie • Urządzenie rozdziału mocy (Power Split Device) -Toyota Prius
• ICE – silnik spalinowy,
połączony z jarzmem;
• MG1 – silnik elektryczny
– połączony z kołem
centralnym;
• MG2 – silnik elektryczny
połączony z kołem
zewnętrznym i napędem
kół
Stany pracy Power Split Device
• Praca silnika spalinowego z maksymalną
sprawnością;
• Sterowanie prędkością samochodu poprzez
zmianę prędkości silników elektrycznych;
• Działanie silnika MG1 jako rozrusznika;
• Zamiana energii mechanicznej ICE na energię
elektryczną w MG1 i MG2;
• Osiąganie dużych mocy przy jednoczesnym
włączeniu ICE, MG1 i MG2.

Przekładnie cięgnowe
Przekładnia pasowa
Zalety:
• Łagodzenie gwałtownych zmian obciążenia;
• Tłumienie drgań;
• Zabezpieczenie zespołów napędowych
przed nadmiernym przeciążeniem;
• Prostota, niskie koszty wytwarzania;
• Mała wrażliwość na dokładność
wzajemnego ustawienia osi
Przekładnia pasowa
• Wady:
• Mała zwartość;
• Duże siły obciążające wały i łożyska –
naciąg pasów;
• Niestałość przełożenia – poślizg pasów.
Sprawność: =0,95-0,96
- tarcie koło-pas, tarcie wewnętrzne, opory
aerodynamiczne
Przekładnia pasowa Mocowanie koła:
• Bezpośrednie
• Specjalne podpory
Pozorny współczynnik
tarcia:
β – kąt rozwarcia rowka
na kole: 34̊, 36̊, 38̊
Przełożenia: i = 1,2-6 (max. 10)
Liczba pasów przekładni:
• z = 1-5 (max. 8)
Duża liczba pasów:
• Mała zwartość przekładni
• Nierównomierne
przenoszenie obciążenia
• Duże prawdopodobieństwo
uszkodzenia przekładni
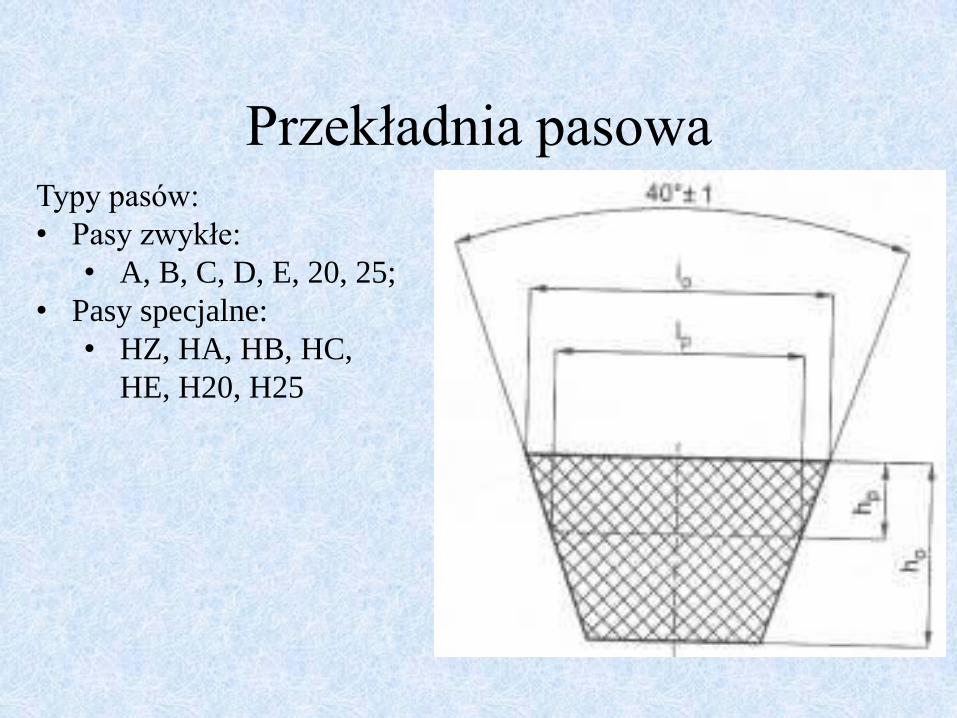
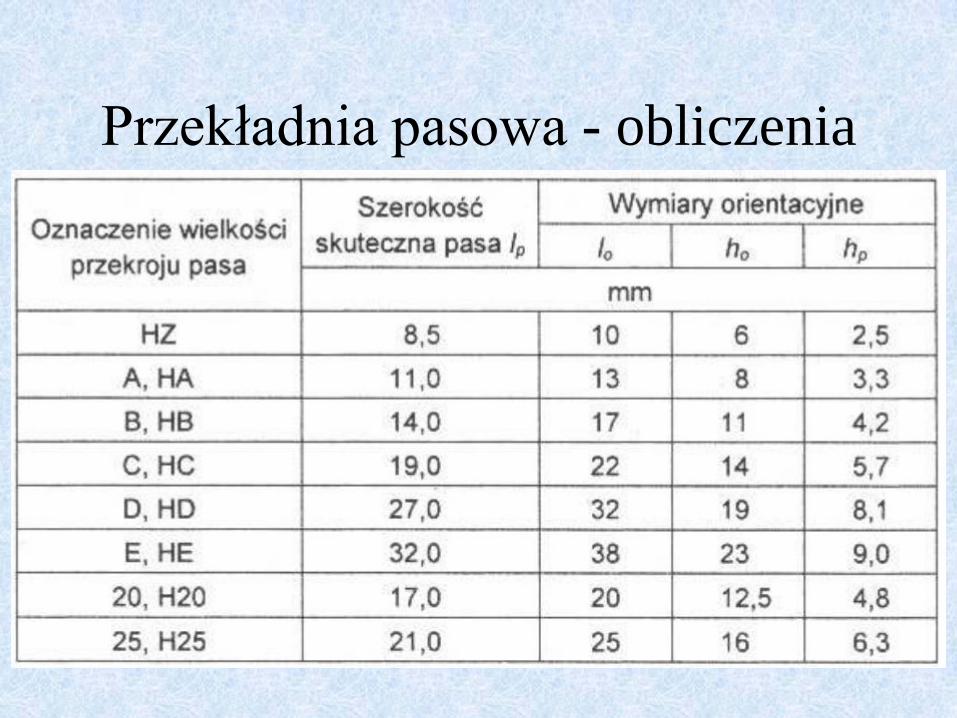
Przekładnia pasowa Typy pasów:
• Pasy zwykłe:
• A, B, C, D, E, 20, 25;
• Pasy specjalne:
• HZ, HA, HB, HC,
HE, H20, H25
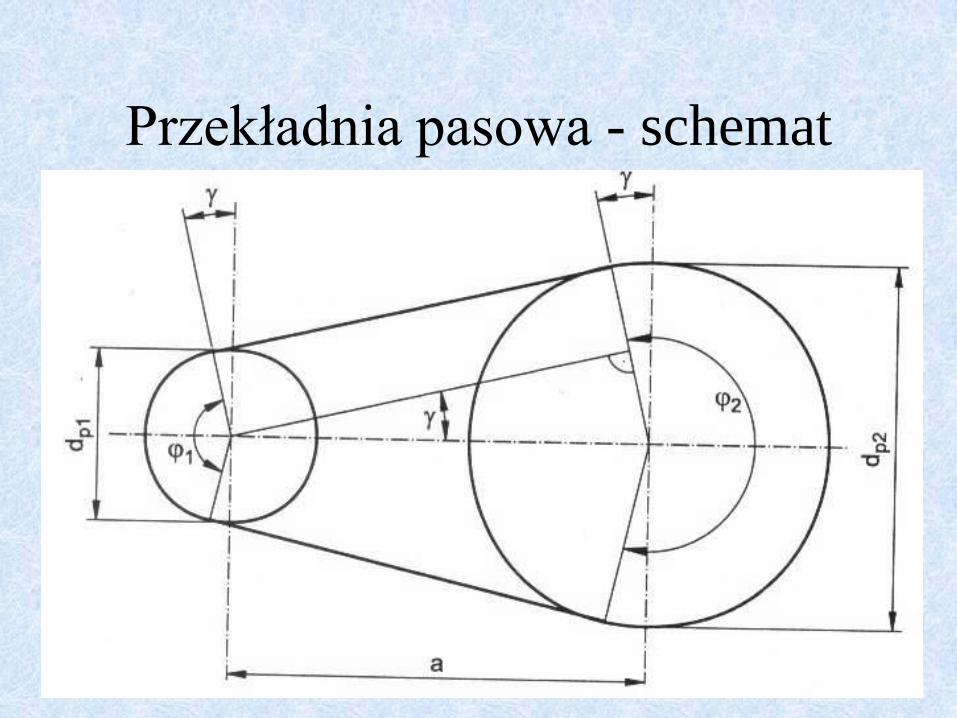
Przekładnia pasowa - schemat
Przekładnia pasowa - obliczenia 1. Wstępny dobór przekroju pasa, średnicy
mniejszego koła (najmniejsze w danym
typoszeregu, ze względu na zwartość
przekładni)
2. Obliczenie prędkości obwodowej na
średnicy skutecznej
2
pdv
Przekładnia pasowa - obliczenia
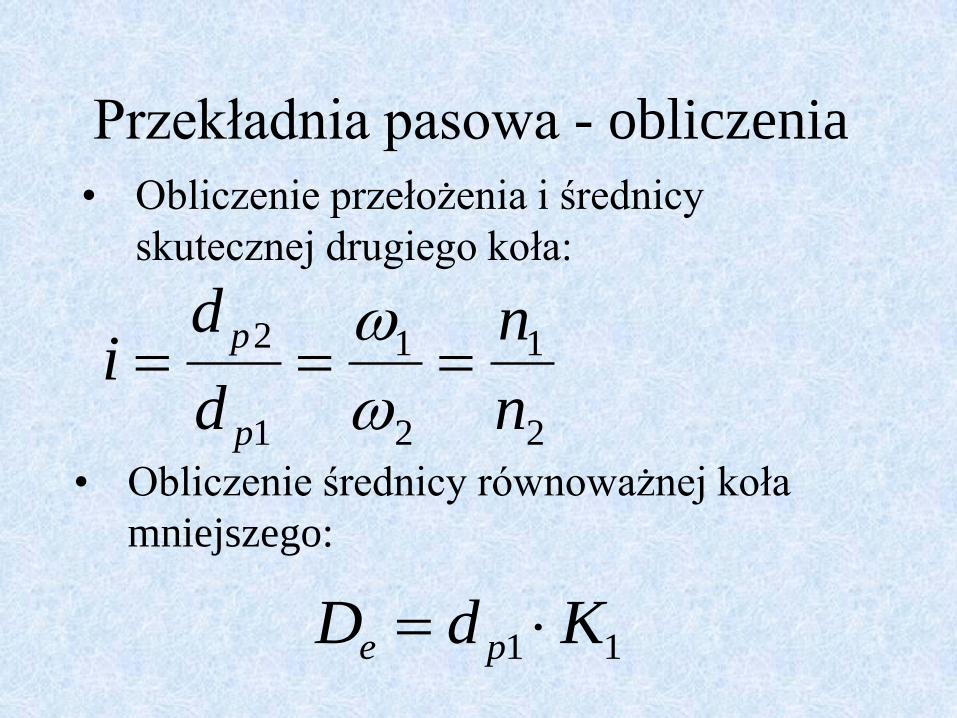
Przekładnia pasowa - obliczenia
• Obliczenie przełożenia i średnicy
skutecznej drugiego koła:
2
1
2
1
1
2
n
n
d
di
p
p
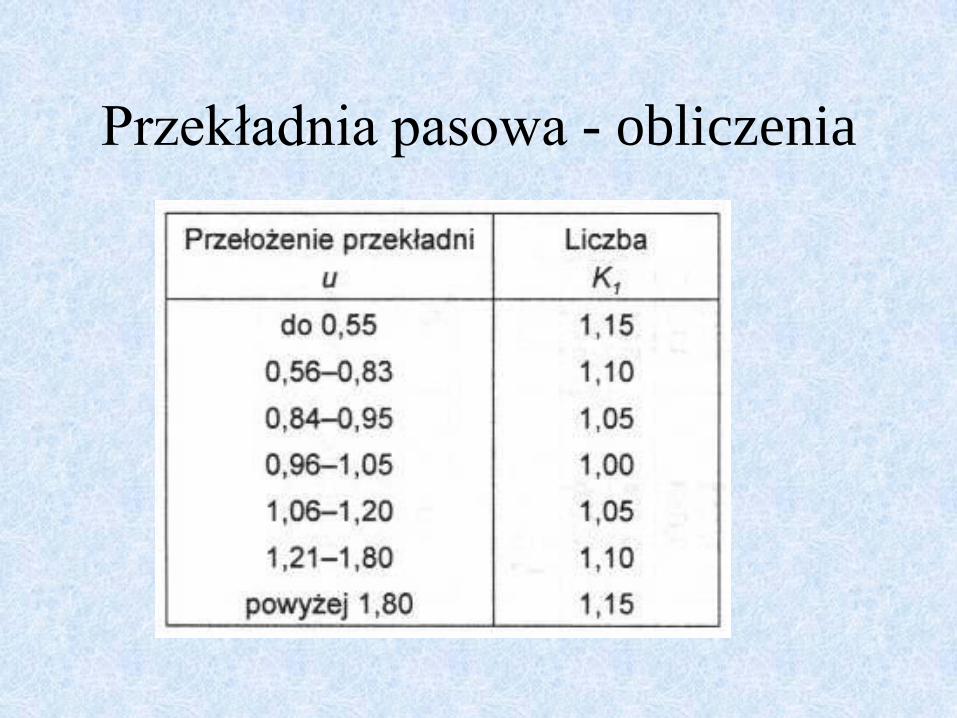
• Obliczenie średnicy równoważnej koła
mniejszego:
11 KdD pe
Przekładnia pasowa - obliczenia
Przekładnia pasowa - obliczenia
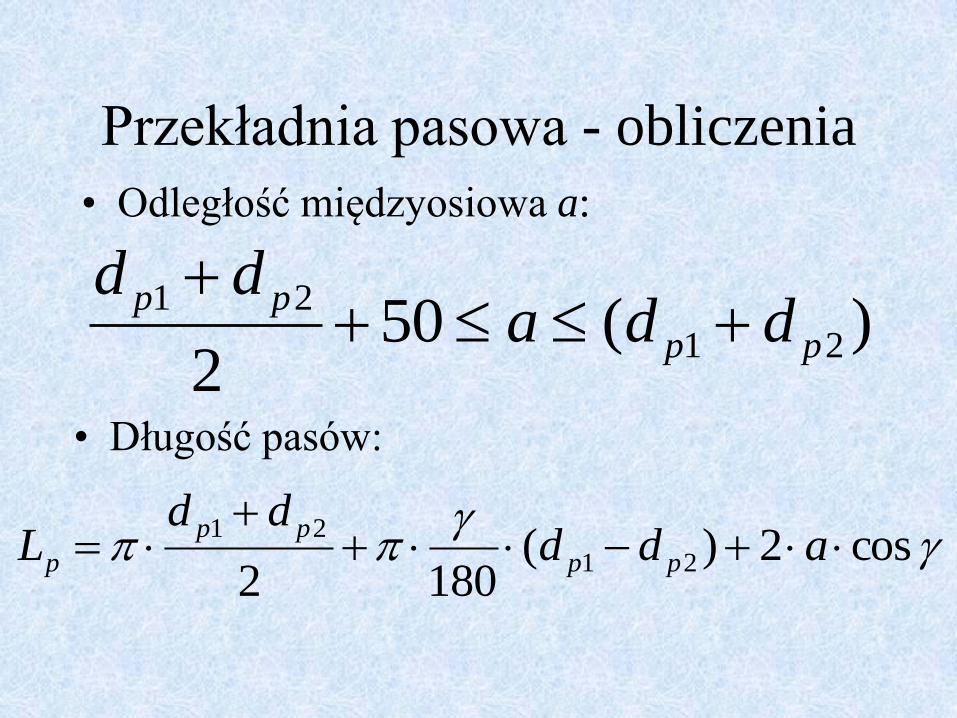
• Odległość międzyosiowa a:
)(502
21
21
pp
ppdda
dd
• Długość pasów:
cos2)(1802
21
21
add
ddL pp
pp
p
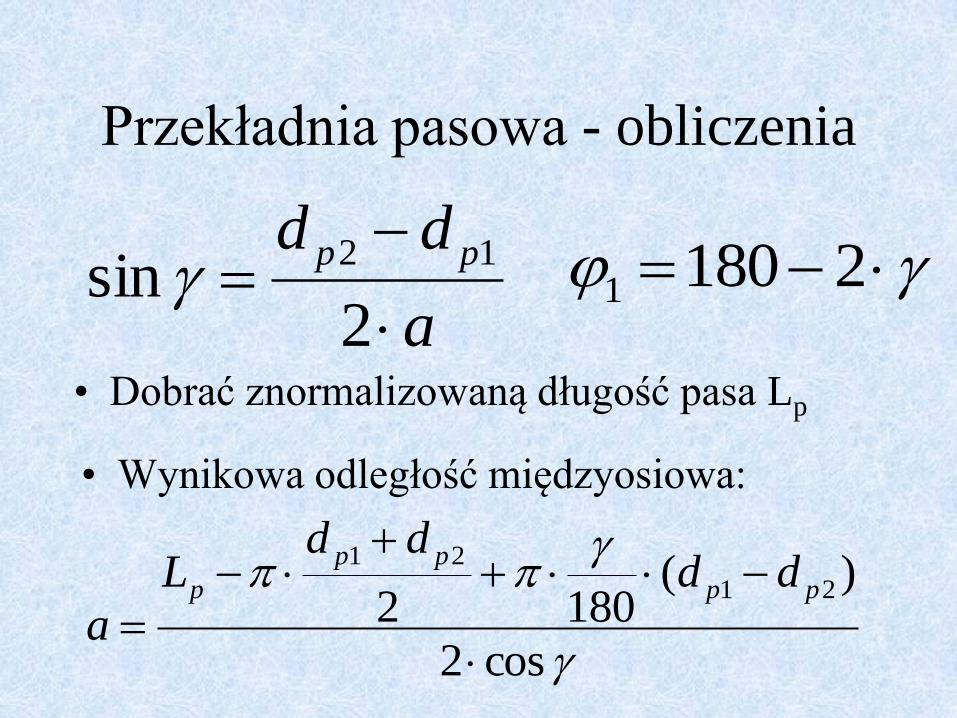
Przekładnia pasowa - obliczenia
a
dd pp
2sin
12 21801
• Dobrać znormalizowaną długość pasa Lp
• Wynikowa odległość międzyosiowa:
cos2
)(1802
21
21
pp
pp
p dddd
L
a
Przekładnia pasowa - obliczenia
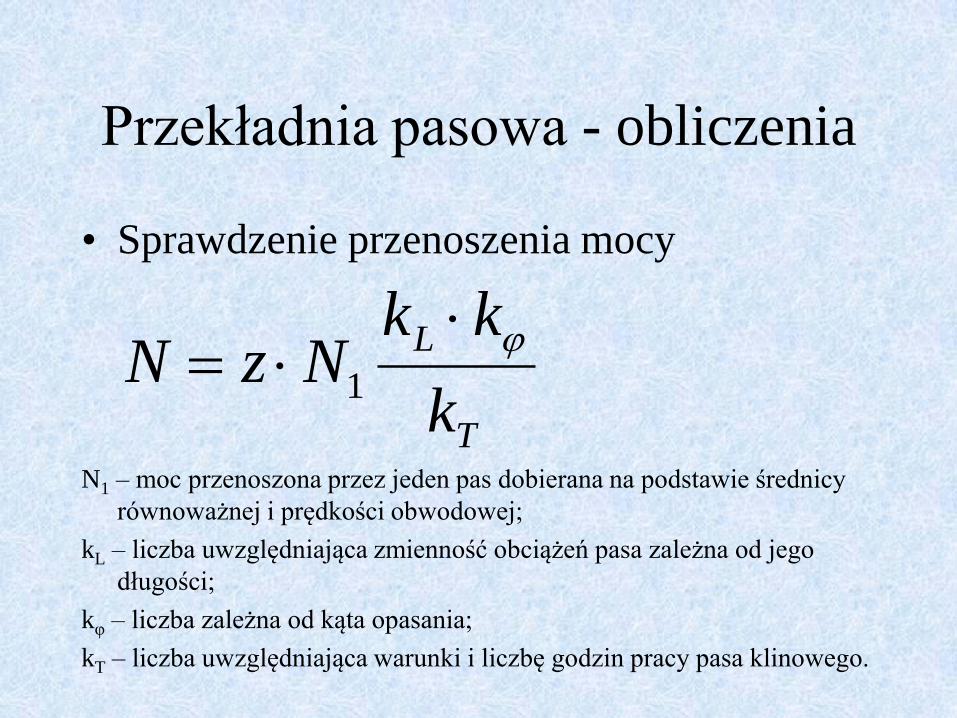
• Sprawdzenie przenoszenia mocy
T
L
k
kkNzN
1
N1 – moc przenoszona przez jeden pas dobierana na podstawie średnicy
równoważnej i prędkości obwodowej;
kL – liczba uwzględniająca zmienność obciążeń pasa zależna od jego
długości;
kφ – liczba zależna od kąta opasania;
kT – liczba uwzględniająca warunki i liczbę godzin pracy pasa klinowego.
Przekładnia pasowa - obliczenia
• Liczba pasów:
kk
kNz
L
T
Wariatory – pasy płaskie, stożkowe koła; pasy
klinowe, koła o zmiennej średnicy skutecznej;
płynna i skokowa zmiana przełożenia.
Wielokrążki
• Wielokrążek prosty;
• Wielokrążek potęgowy;
• Wielokrążek różnicowy
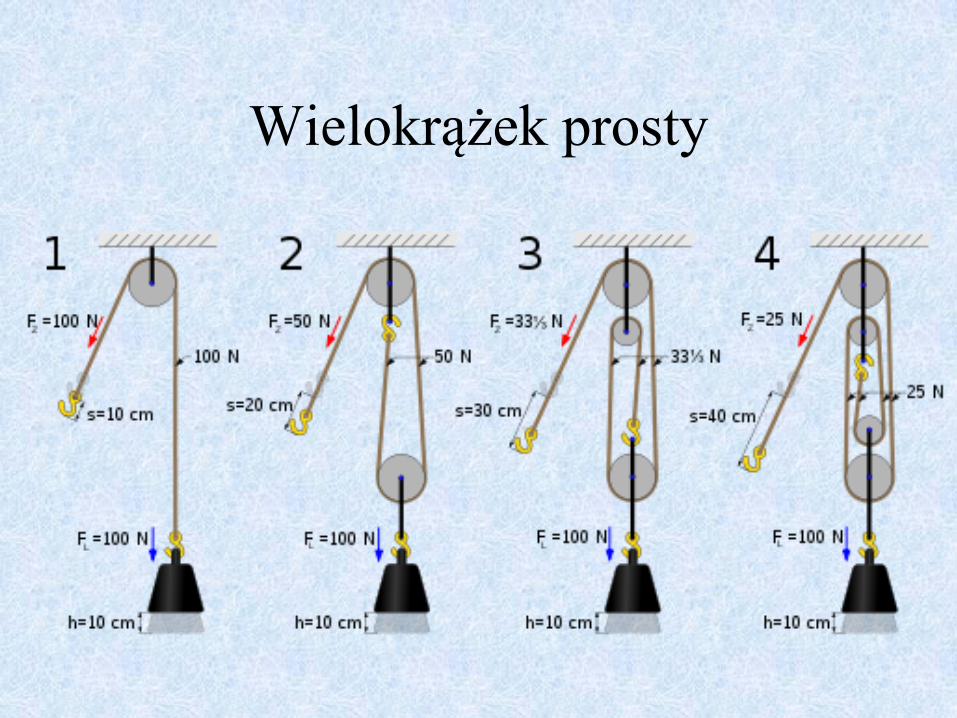
Wielokrążek prosty
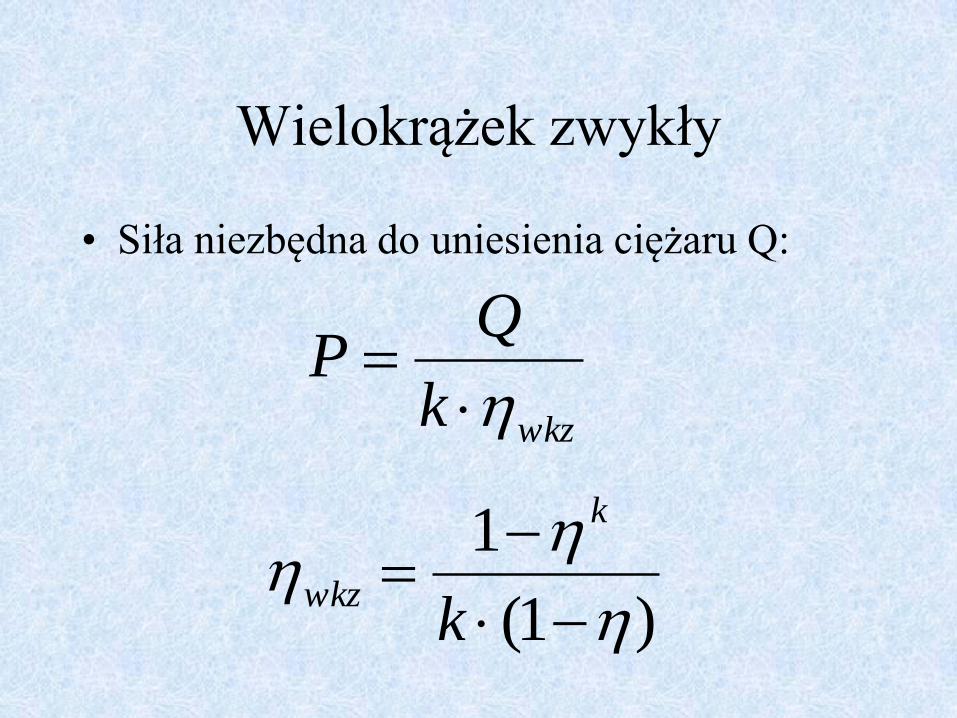
Wielokrążek zwykły
• Siła niezbędna do uniesienia ciężaru Q:
wkzk
QP
)1(
1
k
k
wkz
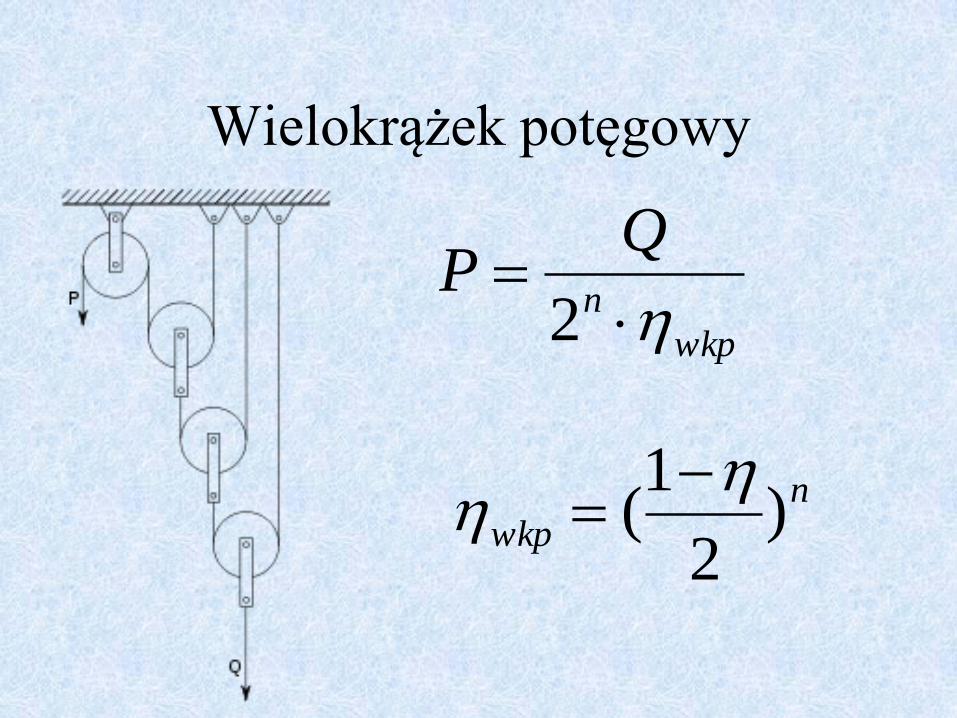
Wielokrążek potęgowy
wkp
n
QP
2
n
wkp )2
1(
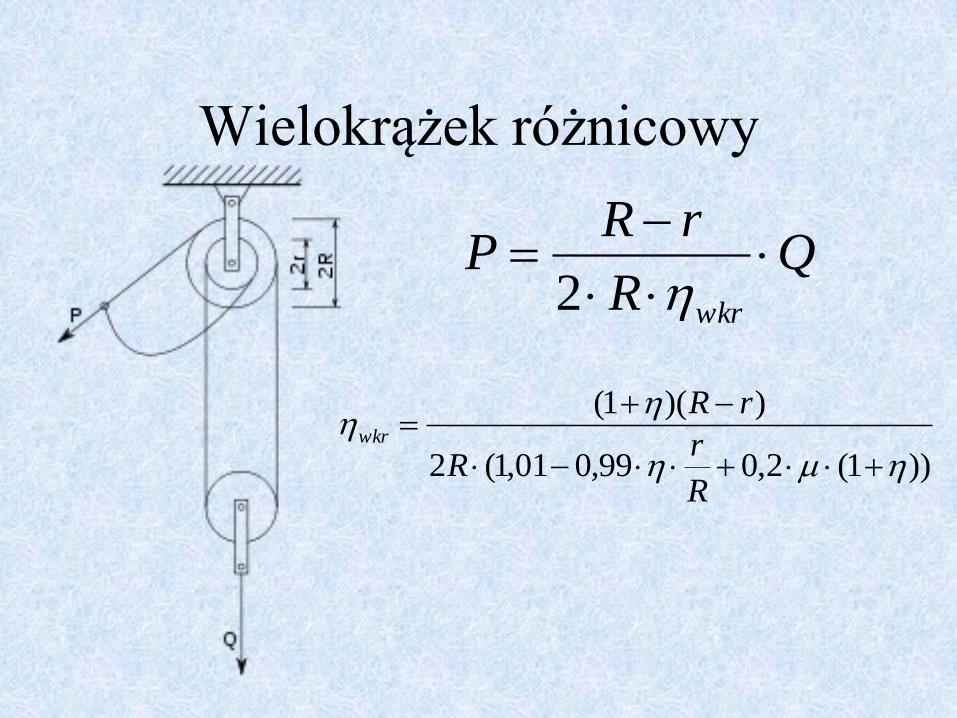
Wielokrążek różnicowy
QR
rRP
wkr
2
))1(2,099,001,1(2
))(1(
R
rR
rRwkr