Systemy CNC - wksir.zut.edu.pl · •GO1 Interpolacja liniowa z zadanym posuwem roboczym. •G02...
37
Politechnika Szczecińska Wydział Mechaniczny Systemy CNC Laboratorium nr 1 Programowanie tokarkowych układów CNC - sys. ProLight Laboratorium nr 2 Programowanie frezarkowych układów CNC - sys. EasyMove Opracował: Dr inż. Artur Berliński Szczecin 2009
Transcript of Systemy CNC - wksir.zut.edu.pl · •GO1 Interpolacja liniowa z zadanym posuwem roboczym. •G02...

Politechnika SzczecińskaWydział Mechaniczny
Systemy CNC
Laboratorium nr 1Programowanie tokarkowych układów CNC - sys. ProLight
Laboratorium nr 2Programowanie frezarkowych układów CNC - sys. EasyMove
Opracował:Dr inż. Artur Berliński
Szczecin 2009

1 Programowanie tokarkowych układów CNC - sys. ProLight
Istotą funkcjonowania obrabiarek CNC jest zatem przyjęcie założenia o istnieniu pewnego układu współrzędnych, w którym odbywa się sterowanie.
Schemat ideowy sterowania numerycznego NC
Z punktu widzenia automatyki sterowanie CNC jest układem automatycznej regulacji programowej, pracującym w zamkniętej pętli sprzężenia zwrotnego (Rys. 2).
Wartość zadana położenia (Zzad) elementów ruchomych obrabiarki (np. suportu) w danej osi sterowanej numerycznie (Z) jest wyznaczana na podstawie programu.
Następnie jest ona porównywana z wartością rzeczywistą położenia (Zrz), mierzoną przez przetwornik pomiarowy (C). Na podstawie różnicy pomiędzy wartością zadaną a rzeczywistą położenia w osi SN układ sterowania (CNC) generuje sygnał sterujący (S), kierowany do napędu osi (M), korygując tym samym jej położenie aż do uzyskania zerowej różnicy pomiędzy wartością zadaną a rzeczywistą położenia osi
(Zrz —> Zzad).
Układ sterowania WSLT Light jest układem sterowania ciągłego w dwóch osiach (2C) z interpolacją liniowo-kołową.

Orientacja układu współrzędnych obrabiarki
Układ ten przeznaczony jest do sterowania tokarek, wykazuje znaczne analogie do układów FANUC.
1.1 Podstawowe adresy układuKod: Funkcja:% Przyrostowy opis współrzędnych środka okręgu.$ Absolutny opis współrzędnych środka okręgu.\ Skok./ Skok opcjonalny.F Posuw w calach na minutę; łącznie z G04, liczba, sekund pauzy.G Instrukcje przygotowawcze.H Wybór wejścia dla urządzeń peryferyjnych.I Współrzędna środka okręgu na kierunku osi X (tylko dla interpolacji
kołowej). K Współrzędna środka okręgu na kierunku osi Z (tylko dla interpolacji
kołowej). L Licznik pętli; określa liczbę powtórzeń bloków lub podprogramu, kąt
rozdzielczości łuku. M Instrukcje maszynowe.N Numer kolejny bloku (jedynie dla potrzeb użytkownika).O Numer bloku startowego podprogramu.P Numer programu odniesienia (razem z M98 lub M99)..Q Głębokość warstwy skrawanej; głębokość
pojedynczego skoku zagłębienia wiertła podczas wiercenia.R Promień okręgu w interpolacji kołowej (stosowany z komendami
G02 i G03); Punkt wyjściowy dla narzędzia w cyklu wiercenia (z kodami cyklu zamkniętego).

S Prędkość obrotowa wrzeciona w obrotach na minutę.T Wybór narzędzia.U Przemieszczenie narzędzia przyrostowo w osi X.W Przemieszczenie narzędzia przyrostowo w osi Z.X Współrzędna przemieszczenia narzędzia w osi X.Z Współrzędna przemieszczenia narzędzia w osi Z.; Wstawienie komentarzu słownego po bloku programu.
Przyrostowy opis środka okręgu ( kod %).- wszystkie współrzędne okręgów podawane będą w układzie
przyrostowym bez wzglądu na zastosowane komendy G90 lub G91. Instrukcja powinna pojawić się jako pojedyncza w pierwszej linii programu
którego dotyczy.Absolutny opis środka okręgu (kod $)- ustawia sposób absolutny opisu środka okręgu w całym programie jak i w
innych powiązanych z nim podprogramów.Instrukcja powinna pojawić się jako pojedyncza w pierwszej linii programu
którego dotyczy.Skok (kod \) i skok opcjonalny (kod /).Komenda skok i skok opcjonalny pozwala na pominięcie kilku wybranych
linii w programie.Użycie komendy skok (\).Znak skoku należy umieścić na początku linii, którą chcemy pominąć. Po
uruchomieniu programu linia zostanie pominięta.Posuw roboczy (kod F). Instrukcja ta używana jest do określenia wartości prędkości z jaką będzie
przemieszczało się narzędzie (w calach lub mm na minutę w zależności od wcześniej wybranych jednostek). Np. F3 znaczy 3cale/minutę w systemie calowym, a w systemie metrycznym 3mm/minutę.
Instrukcja może być także użyta do opisu czasu postoju bezpośrednio po zastosowaniu instrukcji G04.
Np. G04F5 czytane jest przez system sterujący jako zatrzymanie działania maszyny na 5 sekund.
1.2 Instrukcje przygotowawcze (G).Funkcje G umieszcza się przed opisem przemieszczenia narzędzia.
Zawierają informacje jakiego typu operacja będzie wykonywana, w jakim układzie wymiarowania oraz czy przerwać pracę na czas interwencji operatora itp.
Rozróżnia się różne grupy instrukcji. W jednym bloku można stosować więcej niż jedną instrukcję przygotowawczą lecz tylko jedną z danej grupy w jednym bloku.
W systemie proLIGHT Turning Center wyróżnia się następujące grupy instrukcji:
1. grupa instrukcji interpolacji,2. grupa instrukcji jednostek miar,3. grupa instrukcji czasu oczekiwań,4. grupa instrukcji pracy w cyklach,

5. grupa instrukcji trybu programowania,6. grupa instrukcji ustalenia pozycji.7. Grupa instrukcji układów współrzędnych8. Grupa instrukcji kompensacyjnych
Ad 1 Grupa instrukcji interpolacji. Instrukcje te pozwalają na opis typu interpolacji
przemieszczenia narzędzia. Wstawienie instrukcji powoduje jej działanie do momentu aż w kolejnym z bloków nie pojawi się inna instrukcja z grupy interpolacji.
W skład tej grupy wchodzą następujące instrukcje:• G00 Przemieszczenie z posuwem szybkim.• GO1 Interpolacja liniowa z zadanym posuwem roboczym.• G02 Interpolacja kołowa w kierunku zgodnym do ruchu
wskazówek zegara. • G03 Interpolacja kołowa w kierunku przeciwnym do ruchu
wskazówek zegara. • G101 Interpolacja spline definiuje krzywe bazujące na
pkt, nie leżących na liniiAd 2 Grupa instrukcji jednostek miar. Jeśli jedna z tych instrukcji pojawi się na początku programu, jeszcze przed
wykonaniem jakiejkolwiek operacji następuje przyjęcie odpowiedniego układu jednostek dla całego programu. W przeciwnym razie dotyczyć ona będzie tylko części programu następującej po niej.
Kody do ustalania jednostek: G70 calowy G71 metryczny G20 calowy Fanuc G21 metryczny FanucAd 3 Grupa instrukcji czasu oczekiwań. Instrukcje z tej grupy dotyczą tylko bloku w którym się znajdują.
Program nie będzie kontynuowany dopóki warunek wpisany jako konieczny nie zostanie wypełniony. W skład tej grupy wchodzą następujące instrukcje:
G04 Zatrzymanie wszystkich przemieszczeń na czas w sekundach opisany po komendzie F. Po tym czasie następuje uruchomienie dalszego ciągu programu. Jest ona wykorzystywana głównie dla integracji pracy obrabiarki z robotem. Ponieważ kod F w tym przypadku określa czas oczekiwania, to w tym samym bloku instrukcji nie można zmienić wartości posuwu. Np: G04F10 spowoduje zatrzymanie na 10 sekund.
G05 Pauza- możliwość interwencji operatora. Następuje zatrzymanie wszystkich ruchów do momentu manualnego uruchomienia programu przez operatora (komenda Run/Continue).

G25 G26 Czeka z wykonaniem instrukcji z bloku do momentu gdy na wejściu#l TTL (Robot 1 lub wejście użytkownika #5) pojawi się wysoki sygnał. Służy do synchronizacji pracy z robotem .
Ad 4 Grupa instrukcji pracy w cyklach.Praca w cyklach pozwala na przedstawienie grupy
przemieszczeń narzędzia za pomocą jednej komendy. Tryb pracy w cyklach pozwala na zmniejszenie objętości programu w przypadku powtarzanych czynności. Ostatnio wykonywany cykl jest przechowywany do momentu aż nie zastąpi go inny cykl.
Ad 5Grupa instrukcji trybu programowania.Przy programowaniu absolutnym wszystkie współrzędne są odnoszone
do początku aktualnie ustawionego układu współrzędnych. Przy programowaniu przyrostowym współrzędne każdego ruchu są
dodawane do współrzędnych punktu wyjściowego danego przemieszczenia.
W skład tej grupy wchodzą następujące instrukcje:G90 programowanie absolutne.G91 programowanie przyrostowe.Ad 6Grupa instrukcji ustalania pozycji.Instrukcje ustawiania pozycji pozwalają na przemieszczenie narzędzia do z
góry ustalonego punktu lub przyjęcie nowego punktu do którego będą odnoszone następne ruchy.
W skład tej grupy wchodzą następujące instrukcje:G28 Ustawianie punktu odniesienia: instrukcja ta przemieszcza układ
wykonawczy na pozycję bazową tzw. homing, i ustawia go w pozycji 0,0 maszyny. Jest to automatyczna kalibracja obu osi.
G29 Powrót do punktu odniesienia: Przemieszczenie narzędzia do punktu sprecyzowanego we współrzędnych X i Z. Przeważnie używa się po instrukcjach G27 i G28.
G92 Wstępne wyznaczanie pozycji: Działa podobnie jak komenda ustawiania pozycji (Set Position) w Setup Menu. Współrzędne X i Y następują po instrukcji G92 definiując nowa aktualną pozycję narzędzia.
G98 Szybkie przemieszczenie do położenia wyjściowego po wykonaniu cyklu zamkniętego.
G99 Szybkie przemieszczenie do punktu R (może to być powierzchnia materiału lub inny punkt referencyjny) po zakończeniu cyklu zamkniętego.
Ad 7Grupa instrukcji układów współrzędnych. Użycie tych instrukcji pozwala na zastosowanie wielu układów
współrzędnych na jednym lub więcej elementów obrabianychW systemie można ustawić siedem układów współrzędnych.

G53 używany jest do szybkich przemieszczeń w układzie maszynowym (współrzędne maszynowe).
Pozostałe sześć instrukcji pozwala na zastosowanie do sześciu części tego samego detalu sześć różnych układów współrzędnych.
Instrukcje od G54 do G59 odnoszą się odpowiednio do układów 1-6. programowanie we współrzędnych biegunowych. G16 włączenie pracy w układzie biegunowym - podaje się długości
promienia w milimetrach i wartości kąta w stopniach jako współrzędnych oznaczonych literami X i Z.
G15 Aby zakończyć pracę systemu w układzie współrzędnych biegunowych.
Ad 8 Grupa instrukcji kompensacyjnych. Instrukcja ta pozwala na skalowanie i ustawienie kąta obrotu.Kody kompensacji:G51 wywołanie skalowania.G50 rezygnacja ze skalowania.G68 wywołanie rotacji.G69 rezygnacja z rotacji.Używanie kodów skalowania i obracaniaKody skalowania i obracania mogą być używane oddzielnie lub razem.
Każda z tych funkcji jest opisana w kolejnych paragrafach.SkalowanieMożna skalować cały fragment części, lub ustawić różne współczynniki
skalowania dla każdej z osi. Użyj następującego kodu do skalowania: G50 Anulowanie skalowania G51 Przywołanie skalowania
W kodzie G51 X i Z są punktami bazowymi skali, I i K są współczynnikami skali. I=X i K=Z.
G51 X0 Z0 I2 K2W tym przykładzie, X i Z są ustawione na zero i są punktami bazowymi
skali, pozostałe osie są skalowane ze współczynnikiem równym dwa.
Kod obracania (rotacji)Kod obrotu pozwala obracać zaprogramowany kształtdookoła punktu bazowego. Programy tokarskie rzadkopodlegają obracaniu ale jest ono w zasadzie działania takiesame jak skalowanie.G68 Przywołanie obracaniaG69 Anulowanie obracaniaG68 x0 z0 R90X i Z są środkiem obrotu, a 90 jest wartością obrotu w stopniach.
1.3 Funkcje wykonawcze (kod M)Kody te kontrolują funkcje obrabiarki podczas wykonywania programu.
Kody M powinny być umieszczane w oddzielnych blokach niż kody przemieszczeń aby uniknąć sytuacji np. załączenia obrotów wrzeciona podczas przemieszczenia lub po jego zakończeniu.

M00 Pauza; pozwala na umieszczenie pauzy w programie, działa jak G05.MO1 Stop opcjonalny; po włączeniu działa jak G05, po wyłączeniu jest
ignorowany a program jest realizowany dalej bez zmian,(za- i wyłączanie -Optional Stop w menu Run Settings lub Operator Panel)
M02 Koniec programu, działa po zatrzymaniu wszystkich ruchów; wyłącza silniki, wyjścia razem z wrzecionem (i accesory oullets)
M03 Włączenie wrzeciona, aktywowane w chwili wywołania w programie. Pozostaje dopóki nie przyjdzie komenda M05
M05 Wyłączenie wrzeciona, aktywowane po wywołaniu w programie. Pozostaje dopóki nie przyjdzie komenda M03
M06 Wymiana narzędzia (wyłączenie wszystkich czynności na obrabiarce).MO8 Osłona – otwarcieM09 Osłona – zamknięcieM10 Uchwyt otwarcieMil Uchwyt zamknięcieM20 Połączenie z następnym programem, pojawia się na końcu programu
i odsyła do następnej linii w kolejnym programie po wyłączeniu wszystkich ruchów. Możliwość zagnieżdżenia programów do 20-stu poziomów. Przykład:
N37 Z.2 N38 M20PROGRAM2.NC; Chain to PROGRAM TWO
Jeśli, programy łączone są w różnych katalogach nadysku, trzeba umieścić pełną ścieżkę dostępu dodołączanego programu. Jeśli software nie znajdziedołączanego programu, pojawi się odpowiednikomunikat.
M30 Koniec programu: to samo co M02.M35 Ustawienie TTL wyjścia #2 (Robot 2 lub Wyjście 5)
na załączone (On): służy do synchronizacji (więcejinformacji w sekcji L).
M38 Silniki napędów w gotowości. Używana przed pauzamiw pracy np. G05, uaktywnia się po przemieszczeniuopisanym w bloku np. w momencie gdy obrabiarkapozostaje bez nadzoru przed wymianą detaluobrabianego, silniki hamowane prądowo,
M47 Start ponowny uruchomionego programu, występuje powykonaniu wszystkich wykonywanych ruchów,posiada możliwość zwielokrotnienia np. po każdymwykonanym cyklu stosując instrukcję L.
M98 Wywołanie podprogramu, należy skorzystać z kodu Pdo wskazania numeru bloku początkowegopodprogramu. Użyj kodu L do określenia liczbyuruchomień. Możliwość zagnieżdżenia programów do20-stu poziomów.
M99 Wyjście z podprogramu, powrót do miejsca wyjścia irealizacja następnych bloków programu,Notatka:

M105 Wyświetlanie wiadomości na ekranie komputera (niestandardowy kod Light Machines ).
M111 Powrót do bazy osi X(home the x axis).M112 Powrót do bazy osi Z(home the Z axis).M22 Wyjście obecnej pozycji do pliku. Kod M22 jest używany do zapisu do
pliku podczas wykonywania programu. Typowo w pliku są umieszczane aktualne współrzędne X,Z.
1.4 Wartości korekcyjne narzędzi tokarskich układu proLight
Jak wspomniano wcześniej, układ sterowania dla prawidłowego funckjonowania musi znać wymiary charakterystyczne narzędzia (nazywane korekcyjnymi).
Są one przechowywane w rejestrach narzędziowych. Mają one postać adresowanych rekordów, zawierających pewną liczbę pól o wartościach rzeczywistych, przechowujących dane narzędziowe.

Typ ostrza OperacjeParametry korekcyjne
Geometria ostrza w pł. Podstawowej Pr
„Diamond”• Toczenie
ogólne
• Wysięg w kier Z• Wysięg w kier X• Promień naroża • kont pochylenia
pom. kraw. skr.• Wysokość
„Triangle” • Toczenie ogólne
• Wysięg w kier Z• Wysięg w kier X• Promień naroża • kont pochylenia
gł/pom. kraw. skr.
• Wysokość
„Button” • Toczenie ogólne
• Wysięg w kier Z• Wysięg w kier X• Promień naroża
„Grooving”• Cięcie • rowko
wanie
• Wysięg w kier Z• Wysięg w kier X• Promień naroża • Szerokość• Wysokość
„Thread” • Gwintowanie
• Wysięg w kier Z• Wysięg w kier X• Szerokość• Wysokość

„Trace” • Cięcie
• Wysięg w kier Z• Wysięg w kier X• Wysokość
1.5 Programowanie ruchów narzędzi układu proLight
Interpolacja punktowa G0Interpolacja punktowa (zwana też ruchem szybkim) polega na
przemieszczaniu się narzędzia do zaprogramowanego punktu końcowego z dużymi prędkościami w osiach sterowanych numerycznie.
W proLIGHT Turning Center, kod (GOO) może przesuwać narzędzie z maksymalną prędkością (30 ipm= 762mm/min) do podanych współrzędnych.
Interpolacja punktowa jest przeznaczona wyłącznie do ruchów ustawczych narzędzia. Należy pamiętać, że skutkiem ruchu szybkiego może być kolizja (kontakt narzędzia lub innego elementu ruchomego z przedmiotem obrabianym lub innym elementem obrabiarki). Z tego względu wszystkie ruchy z interpolacją punktową należy programować bardzo starannie.
N20 G90 G00 X10 Z20 (narządzie przemieszcza się z dowolnego punktu do punktu P1, programowanie absolutne)
N25 G00 G91 X30 Z40 (narzędzie przemieszcza się od punktu P1 do P2,programowanie przyrostowe)
Interpolacja liniowa G1Interpolacja liniowa - Rys. 47 - należy do najprostszych, a zarazem
najczęściej wykorzystywanych ruchów roboczych (obróbczych).

Wymaga zaprogramowania posuwu (adres F) - podobnie jak pozostałe interpolacje robocze. Ruch roboczy związany jest również z większą dokładnością pozycjonowania w punkcie końcowym.
Interpolacja liniowa na tokarce pozwala toczyć powierzchnie czołowe, walcowe i stożkowe, na frezarce - wiercić, rozwiercać, frezować powierzchnie czołowe, wytaczać itp.
N25 GO1 G90 X40 Z60 F0.1 (narzędzie przemieszcza się od punktu PI do P2 z posuwem 0.1 mm/obr, programowanie absolutne)
N25 GO1 G91 X30 Z40 F0.1 (narzędzie przemieszcza się od punktu PI do P2, programowanie przyrostowe)
Fragment programu operacji tokarskiej zapisany w układzie absolutnym i przyrostowym:
mowanie asolutne i przyrostowe

N.. (programowanie absolutne)N30 GOI G90 X20 Z80 F0.3 (powierzchnia walcowa 40)N40 X35 Z65 (powierzchnia stożkowa)N50Z10 (powierzchnia walcowa ę70) N.. (programowanie przyrostowe)N30 GOI G91 X20 Z30 F0.3 (powierzchnia walcowa ę40)N40X15Z15 (powierzchnia stożkowa)N50 Z55 (powierzchnia walcowa ę70) Interpolacja kołowa G2/G3
Przewidziano dwie metod programowania okręgu: 1. Absolutne programowanie środka okręgu z wykorzystaniem
niemodalnych parametrów interpolacji I, J, K - za ich pomocą programowany jest punkt środka okręgu względem aktualnego, przedmiotowego układu współrzędnych
2. Przyrostowe programowanie środka okręgu - Wymaga deklaracji kodu % (Arc Center Incremental Mode) z wykorzystaniem niemodalnych parametrów interpolacji I, J, K - za ich pomocą programowany jest punkt środka okręgu; traktowane są one jako wektory składowe (w odpowiednich osiach - I w X, J w Y, K w Z) wektora od punktu początkowego ruchu do punktu środka okręgu -programowanie przyrostowe, niezależne od funkcji G90/G91.
W tej metodzie promień okręgu jest wyznaczany przez układ sterowania z twierdzenia Pitagorasa (Rys. 54).

Rys. 54. Interpolacja kołowa G2/G3 z parametrami interpolacji I,J,K (przyrostowo)
Rozdzielczość kątowa okręguKod L określa rozdzielczość kątową dla interpolacji kołowej. System
realizując zarys łuku dzieli go na serię elementów. Kod L określa kąt łuku aproksymowanego linią. Im mniejszy kąt tym płynniejszy zarys.
L=360o/z, gdzie z liczba odcinków aproksymujących okrąg:z=10 kąt L=36o
z=6 kąt L=60o
G2 X10 Z15 I10 K10 L60
Ujemna wartość kodu L daje normalizację współczynnika:L = alfa * r {w calach},
więc większy kąt daje mniejszą wartość stopnia. Dla przykładu, gdzie domyślnie ustawiona wartość kodu L = -1:
• kąt z promieniem 1 aproksymuje linie o 1 stopień kąta.• kąt z promieniem 0.5 aproksymuje linie o 2 stopnie kąta.
(Stopień = -L/R, lub Stopień = -(-l)/0.5, co daje 2)System domyślnie ustawia wartość tego kąta jako 2 stopnie.Można ustawić wartość mniejszą lecz należy pamiętać że system posiada
ograniczona zdolność rozdzielczą.

1.6 PodprogramyPodprogramy są używane do uruchamiania powtarzalnych bloków kodu
NC. Ponieważ podprogram może być wielokrotnie uruchamiany, nie ma potrzeby kilkakrotnego wprowadzania tego samego kodu.
Ich zadaniem jest uczynienie programu bardziej przejrzystym, łatwiejszym w analizie, a często także ograniczenie jego objętości (dzięki wielokrotnemu wywoływaniu z programu głównego zamiast powtarzaniu w programie głównym identycznych bloków).
Jeżeli jeszcze wprowadzić opcje parametryzacji to podprogramy doprowadzą nas do powszechnie stosowanych cykli obróbkowych.
Poznanie techniki podprogramów jest zatem pierwszym krokiem do zrozumienia cykli obróbkowych.
Kody NC używane w proLIGHT Turning Center:M98 Wywołanie podprogramu.M99 Powrót z podprogramu.Kod P - Kod P jest używany jako odnośnik do pierwszej linijki podprogramu
( która rozpoczyna się od kodu O) Kod P powinien być wprowadzany zaraz poM98
Kod L - Kod L w podprogramach służy jako licznik pętli. Komputer uruchamia podprogram tyle razy ile określa to kod L. Np. L5 podprogram jest wykonywany pięć razy (opcjonalnie).
Kod O - Kod O zastępuje kod N w pierwszej linijce podprogramu.Podprogram jest wywoływany M98 i kodem P. Kiedy M98wywołuje podprogram, program główny jest przerywany naczas wykonania podprogramu.Kod P wskazuje adres podprogramu (pierwszą linijkępodprogramu). Pierwsza linijka kodu podprogramu używakodu O zamiast kodu N.Wywołanie M99 powoduje powrót do programu głównego odmiejsca wywołania podprogramu.Wywołania podprogramu mogą być zagnieżdżone. Oznaczato, że wywołany podprogram może wywołać innypodprogram. Predefiniowana liczba poziomów zagnieżdżeniawynosi 20. Przykład podprogramu NCPoniższy program wykonuje serię lekko zfazowanycłi rowków. Ustawienie
jest na przedmiot o średnicy 0.75" i długości 2", więc materiałem wejściowym powinien być wałek trochę dłuższy 0.75"x2.5".
Zauważ, że program główny jest napisany absolutnie a podprogram inkrementalnie. To wymusza użycie G90 po uruchomieniu podprogramu aby umożliwić ruch powrotny do punktu startowego.
;THIS FILE FOR 2.5 INCH BY 0.75 INCH STOCK MOUNTED IN CHUCK;USE WITH A PROFILING TOOL NORMAL SIDE ORIENTATION;SET THE START POINT AT Z2 X0.375 G0 G90 G03; ABSOLUTE PROGRAMMING G0 X 3.80 Z20M98 P1000 L4; CALLS SUBPROGRAM 1000 AND EXECUTES IT 4
TIMES G90; ABSOLUTE PROGRAMMING

G0 X3.8 Z20M02; END OF PROGRAM ~~ O1000; START OF SUBPROGRAMG91; INCREMENTAL PROGRAMMING SELECTEDG1 X-0.40 Z-0.40 F3 /G1 Z-1.25 _/G1 X0.40 Z-0.40 \_/G0 Z-2.0 -\_/M99; END OF SUBPROGRAM
1.7 Cykle obróbkowe (Zamknięte cykle obróbkowe)
Cykle obróbkowe stanowią istotny składnik programów sterujących, pozwalający na
• znaczną automatyzację programowania, • ograniczenie rozmiarów programów oraz • umożliwiający szybką i prostą zmianę parametrów zabiegów,
przez nie opisywanych. Pod pojęciem cykli obróbkowych rozumie się stałe, sparametryzowane
podprogramy, umieszczone w układzie sterowania, służące do programowania obróbki typowych zabiegów, np. wiercenia, gwintowania, toczenia itp.
Z uwagi na charakter obróbki cykle obróbkowe zostały podzielone na trzy grupy:
• cykle wiercenia; • cykle frezowania; • cykle toczenia.
Instrukcje zamkniętego cyklu umożliwiają wykonywanie wielu operacji wpisując tylko kilka linijek kodu. Są powszechnie używane dla powtarzalnych operacji w celu zredukowania długości kodu NC.

Komendy kodu Cyklu Zamkniętego są wykonywane dopóki nie zostaną zastąpione innym kodem Cyklu Zamkniętego.
Instrukcje zamkniętego cyklu:G32 Toczenie gwintów w cyklu zamkniętym (więcejinformacji w sekcji H) G72 Toczenie luków w cyklu zamkniętym (clockwise) G73 Toczenie łuków w cyklu zamkniętym
(counterclockwise) G77 Toczenie powierzchni bocznych (side turning) w cyklu zamkniętym
(Fanuc G90) G79 Toczenie zakończeń w cyklu zamkniętym (Fanuc G92) G80 Opuszczenie trybu pracy w cyklu zamkniętym G81 Wiercenie (Straight drilling) G83 Nawiercania (Peck drilling)Poniższe kody są używane w cyklu zamkniętym:G98 Szybkie przesunięcie do pozycji początkowej po zakończeniu cyklu
zamkniętego; domyślna funkcja systemowa.G99 Szybkie przesunięcie do punktu R po zakończeniu cyklu zamkniętego.Kod K - Używany do określenia liczby powtórzeń. Domyślna wartość =1.
Kiedy K=0, dane dotyczące wiercenia są przechowywane.Kod P Używany do określenia długości postoju w sekundach.Kod Q - Używany do określenia głębokości cięcia. W trybie nawiercania
(peck drilling) każde nawiercenie (peck) korzysta z tej samej wartości Q. Q jest zawsze dodatnie. Jeśli użytkownik wprowadzi wartość ujemną, zostanie ona zamieniona na dodatnią. Przy toczeniu powierzchni bocznych i końcowych w cyklu zamkniętym wartość Q określa głębokość każdego toczenia zgrubnego.
Kod R - Używany do określenia startowego punktu odniesienia dla nawiercania (peck drilling) lub określenia zbieżności przy toczeniu powierzchni bocznych i końcowych w cyklu zamkniętym. Punkt ten może znajdować się na powierzchni materiału lub może to być inny punkt odniesienia.
Cykle toczenia zarysu po łuku G72 i G73Kod G72 (G73) umożliwia toczenie zarysu po łuku (pow. kuliste) w jednej
kwarcie zgodnie (lub przeciwnie do ) z ruchem wskazówek zegara, np.:
G0 X0.001 Z1; START POINTG72 X.5 Z.5 I0 K.5 Q.04G80W drugim bloku kodu, G72 określa łuk zgodny z ruchem wskazówek
zegara CW, kody I i K określają punkt środkowy łuku, oraz Q dla określenia głębokości skrawania.
G0 X0.001 Z1G73 X.5 Z.5 I0 K.5 Q.04G80

Instrukcja G73 działa podobnie z tym że w kierunku przeciwnym do ruch wskazówek zegara (CCW). Np.:
G0X0.001Z1 G73X.5Z.5I0K.5Q.004G80
Toczenie powierzchni cylindrycznych G77Kod G77 może być użyty dla wykonania 4 funkcji:- toczenie powierzchni cylindrycznych zewnętrznych;- toczenie powierzchni cylindrycznych wewnętrznych;- toczenie powierzchni stożkowych zewnętrznych / wewnętrznych;Narzędzie wykonuje ruch, ruchem roboczym) do współrzędnej X;Z po czym
wraca ruchem szybkim do punktu startowego. Np.:G0 X.6 Z.8G77 X.4 Z.5 F10G80

Toczenie z podziałem na naddatki wymaga podania jego wielkości. Np.:G0X.6Z.8G77 X.25 Z.5 Q.02 F10G80
ZbieżnośćZbieżność uzyskuje się przez dodanie kodu R. Poniższe przykłady pokazują
dodatnią zbieżność (używając ujemnej wartości R) i ujemną zbieżność (używając dodatniej wartości R).
G77 X0.25 Z0.5 R-0.1 F10

G77 X0.25 Z0.5 R0.1 F10
G77 X0.25 Z0.5 Q0.02 R0.1 F10
Toczenie powierzchni czołowych G79G79 można używać wraz z kodem Q i R tak jak G77. Przykład typowego
użycia G79:GO; START POINT G79 X.2 Z.8Q.03 F10 G80

Cięcia wykonane w cyklu G79 z dodatnim i ujemnym R
Zakończenie cyklu G80G80 służy do zakończenia pracy w cyklu zamkniętym. Kod ten zaprzestaje
wykonywania aktualnego cyklu i powraca do normalnych operacji. Również wszystkie inne dane toczenia są usunięte. Można również zakończyć pracę w cyklu zamkniętym korzystając z kodu G00 lub GO1; kod G80 zostanie automatycznie wykonany przed G00 czy GOI.
Wiercenie otworów G81 i G83Wiercenie krótkich otworów G81 (straight drilling). Wiercenie stopniowe z odwiórowaniem G83 (peck drilling). Parametry cyklu:R - punkt wycofania nad materiał Q – Wartość kolejnych stopni Cykle wiercenia można kojarzyć z instrukcjami:
• G98 domyślnie służy do szybkiego przemieszczenia do punktu początkowego (Z), (brak spowoduje powrót ruchem roboczym) lub,

• G99 do szybkiego powrotu do określonego wcześniej punktu R.
G0 X0 Z1; RAPID TO 0,1G81 Z.9 R1 F2; CENTER DRILL TO DEPTH OF Z.9 FROM Zl FEED 2, RAPID
TO INITIAL POINT G80G83 Z.5 R1 Q.1 R0.9 F3;PECK DRILL TO Z.5 FROM Z1 EACH PECK .1, RAPID
TO POINT G80; CANCEL CANNED CYCLE M2; END PROGRAM
Cykl toczenia gwintów G32N25 G0 X7 Z-9.8; POCZATEK GWINTUN26 S190 M03 ; NOWE OBROTY N27 G04 F5 ; STOP 5 SEKUND

N28 G32 X6.4 Z-20 Q0.05 F1.5 ; X i Z - KONIEC GWINTU, Q-GLEBOKOSC poj. przejścia, F - S K O K G W I N T U
N30 G80 ;KONIEC GWINTOWANIA
1.8 Intrpolacja SPLINEPodczas gdy interpolacja kołowa definiuje łuki jako kawałki koła,
interpolacja spline definiuje krzywe bazujące na punktach nie leżących na linii.
Takie bardziej elastyczne krzywe nazywane są krzywymi Bezier. Nazwa pochodzi od nazwiska francuskiego inżyniera pracującego dla firmy
Renault, który stworzył formuły matematyczne opisujące krzywe stosowane w projektowaniu samochodów.
Inaczej niż w przypadku współrzędnych łuku definiowanego przez punkt początkowy i środek krzywizny, współrzędne krzywych Bezier określamy przez dwa punkty końcowe (brzegowe) i dwa punkty kontrolne.
Najczęściej stosowany w grafice typ krzywych - ścieżek zdefiniowanych przez położenie czterech punktów - dwóch końców zwanych węzłami oraz tzw. punktów kontrolnych opisujących kąt nachylenia.
Krzywa Bezier to pojedyncza krzywa rysowana od końcowego punktu E1 do końcowego pkt. E2.
Jest wyznaczona przez półprostą przechodzącą przez punkt E1 i C1oraz półprostą E2 C2.
Jeśli by przesunąć jeden z punktów kontrolnych, zmieni się kont półprostej a krzywa podąży za nią w sposób zapewniający stycznoąść

Punkty końcowe krzywej Bezier są zakotwiczone, tak więc kształt krzywej zależy od położenia punktów kontrolnych.
Punkty kontrolne wpływają na kształt krzywej na wiele sposobów, umożliwiając dużą elastyczność definicji krzywej.
Konstrukcja matematyczna krzywej Bezier jest dość skomplikowana.Krzywe Bezier są generowane automatycznie przez program CAD i nie ma
potrzeby tworzenia ich manualnie. Wszystko co użytkownik powinien wiedzieć to dwa punkty końcowe krzywej i dwa punktu kontrolne.
Wprowadzenie współrzędnych tych czterech punktów, w pełni wystarcza do matematycznego wyznaczenia krzywej przez komputer. Poniżej znajduje się prosta metoda konstrukcyjna wyznaczenia krzywej Bezier.
Konstrukcja geometryczna krzywej bezier jest następująca:Połączenie punktów kontrolnych C1 i C2 oraz pkt końcowych E1, E2Wyznaczenie odcinka 1 ze środka odcinka E1 C1 i C1 C2
Podobnie - Wyznaczenie odcinka 2 ze środka odcinka E2 C2 i C2 C2.3 ze środków otrzymanych 1, 2.

Korzystając z 1, 2, 3 wyznacza się 4-9.Procedurę powtarza się do otrzymania krzywej łamanej o zadowalającej
liczbie segmentów
W rzeczywistości krzywa bezier jest zbiorem połączonych ze sobą prostych odcinków.
Programowanie Interpolacji Spline Polega na wprowadzeniu współrzędnych punktów początkowego,
końcowego i obu kontrolnych do części programu NC. Poniżej blok kodu NC zawierający interpolację spline:N24 G0 X.5 Z3; START POINT N25 G101 X2 Z.5 I1.5 K3 A2 C1.5N26 G1 Z0Blok N24 przesuwa narzędzie do punktu startowegoBlok drugi (N25) można analizować w sposób następujący:N25 Numer linii w sekwencji = 25G101 Kod przygotowawczy do interpolacji splineX2 wartość wsp.X dla punktu końcowegoZ.5 wartość wsp.Z dla punktu końcowegoI1.5 wartość wsp.X dla pierwszego punktu kontrolnegoK3 wartość wsp.Z dla pierwszego punktu kontrolnegoA2 wartość wsp.X dla drugiego punktu kontrolnegoC1.5 wartość wsp.Z dla drugiego punktu kontrolnegoJeżeli punkt startowy jest X.5, Z3, krzywa wygląda
następująco:

Poprzednio, kiedy używaliśmy interpolacji kołowej określaliśmy segmenty łuku w stopniach korzystając z kodu L. W interpolacji spline kod L wykorzystać do zdefiniowania liczby segmentów potrzebnych do uzyskania krzywej Bezier. Im więcej segmentów tym dokładniej sza(gładsza) będzie aproksymacja krzywej.
Zarówno zbyt duże jak i zbyt małe wartości przyporządkowane kodowi L mogą spowodować problemy.
1.9 Przykład

N01 M08N02 G04 F02N03 M10N04 G05N05 M11N06 G04 F02N07 M09N08 G04 F02N10 G54 G0 X0 Z0N20 G90 S1500 M03N25 M06 T01 F300N30 G0 G55 X12 Z42.5N35 G77 X5 Z35 Q0.5 R-2N40 G80N45 G0 G55 X11 Z35N50 G01 X5N55 G72 X10 Z30 I5 K30 Q0.5N60 G80N65 G54 G00 X0 Z0N70 M06 T03N75 G0 G55 X12 Z25N95 G79 X5 Z17 Q1 R-5N100 G80N105 G54 G00 X0 Z0N110 M06 T01 N115 G0 G55 X12 Z14N120 G01 X5N125 G73 X8 Z11 I8 K14 Q0.5N130 G80N135 G01 X10N145 Z-2N150 G54 G00 X0 Z0N155 M06 T02N160 G0 G55 X11 Z25N165 G1 X5N170 G73 X10 Z30 I5 K30 Q0.5N180 G80N185 G54 G00 X0 Z0N190 M06 T03N195 G55 G0 X12 Z0N200 G01 X2N205 G0 X12N210 G54 X0 Z0N500 M30

2 Programowanie frezarkowych układów CNC - sys. EasyMove
Obrabiarka o niewielkich rozmiarach stosowana do obróbki przedmiotów o małych gabarytach z materiałów łatwo obrabialnych takich jak mosiądz, stopy aluminium, miedź, drewno, tworzywa sztuczne.
Używana jest przeważnie do celów dydaktycznych oraz wszelkie prace Grawerskie.
Standardowo maszyna pracuje w układzie 3 osi, opcjonalnie można wyposażyć obrabiarkę w 4-tą oś obrotową,.
Zakres przesuwu w poszczególnych osiach wynosi odpowiednio X 295mm Y 200mm Z 130mm. Osie X i Y są osiami poziomymi natomiast oś Z jest osią wrzeciona (pionową).
Stół frezarki wykonuje ruch wyłącznie w osi Y natomiast wrzeciono może być przemieszczane wzdłuż osi poziomej X jak i pionowej Z.
Zarówno stół jak i wrzeciono zamocowane są na bezluzowych prowadnicach tocznych i są napędzane poprzez śruby toczne pracujące również bezluzowo.
Wrzeciono o mocy 900W z płynną regulacją zmian prędkości zamontowane we frezarce CPM 3020 osiąga prędkość obrotową od 11000obr/min do 25000 obr/min.

Budowa frezarki CPM 3020
OSŁONA
WRZECIONO
UCHWYT PRZEDMIOTOWY
STÓŁ PRZEDMIOTOWY
X
Y
Z
610
705
250X500
655 1 2 3 4 5 6
1 – przycisk bezpieczeństwa – po wciśnięciu przycisku następuje natychmiastowe przerwanie pracy frezarki.
2 – przełącznik z kluczem – klucz może być ustawiony w dwóch pozycjach a mianowicie w pozycji:
- AUTO – jest to tryb automatyczny, w którym program obróbkowy wykonywany jest w całości, może być zatrzymywany i ponownie uruchamiany przy użyciu przycisków stop i start.

- TEST – jest to tryb, w którym wczytywany program wykonywany jest wiersz po wierszu
3 – przycisk zasilania – po naciśnięciu przycisku zostaje doprowadzone zasilanie do frezarki, lecz aby wyłączyć frezarkę należy wcisnąć przycisk bezpieczeństwa gdyż przycisk zasilania jest przyciskiem jednostanowym i wyłączenie nim jest niemożliwe.
4 – przycisk startu – jeżeli program obróbkowy jest przechowywany w pamięci FLASH EPROM (pamięć frezarki) to wciśnięcie przycisku spowoduje wykonanie tego programu. W przypadku gdy podczas wykonywania programu został wciśnięty przycisk stop naciśnięcie przycisku start spowoduje kontynuację zatrzymanego programu.
5 – przycisk stopu – naciśnięcie przycisku powoduje zatrzymanie wykonywanego przez frezarkę programu i wyłączenie obrabiarki. W przypadku sterowania DNC istnieje możliwość odwołania stopu poprzez wywołanie odpowiedniej funkcji natomiast przy sterowaniu CNC obróbkę można kontynuować wciskając przycisk start.
6 – przycisk stanu osłony – jeżeli przycisk się świeci wówczas frezarka nie pracuje i osłonę można otworzyć, natomiast kiedy przycisk jest zgaszony na frezarce wykonywana jest praca i podniesienie osłony jest niemożliwe.
Frezarka połączona jest z komputerem za pomocą łącza szeregowego RS 232 przez, które następuje dwustronna komunikacja między komputerem, a frezarką.
Przez łącze te z komputera przesyłany jest program obróbkowy jak i również przesyłane są informacje z frezarki dotyczące np. błędów, jakie zachodzą podczas obróbki.
We frezarce znajduje się łącze DB9 umożliwiające współpracę z robotem. Frezarka CPM 3020 może pracować w elastycznym systemie wytwarzania, a program obróbkowy, który ma być wykonany wywołany jest i uruchamiany w odpowiednim momencie przez nadrzędny komputer ( sterowanie DNC).
Opis Instrukcji sterujących, języka programowania używanych do programowania frezarki CPM 3020
Jednostki geometryczne - µmNp. 10mm=10 000 jedn. ukł. Easymove CNCN... – numer bloku programuREF XYZA – zjazd na punkt referencyjny w osiach XYZAMOVE ABS X... Y... Z... A... – przemieszczenie ruchem roboczym z
interpolacją liniową w układzie bezwzględnym (absolutnym)
MOVEABS X20000 Y15000 Z5000 Przemieszczenie w osiach do punktu o współrzędnych X 20mm Y 15mm Z
5mm.
FAST ABS X... Y...Z...A... - przemieszczenie ruchem szybkim z interpolacją liniową w układzie bezwzględnym (absolutnym).
FAST ABS X100000 Y20000 Z2000

Przemieszczenie w osiach do punktu o współrzędnych X 100mm Y 20mm Z 2mm
MOVE REL X...Y...Z... - przemieszczenie ruchem roboczym z interpolacją liniową w układzie przyrostowym
MOVE REL X100000 Y20000 Z2000Przemieszczenie w osi X o 100mm w osi Y o 20mm w osi Z o 2mm
FAST REL X...Y...Z... - przemieszczenie ruchem szybkim z interpolacją liniową w układzie przyrostowym
FAST REL X40000 Y1000 Z300Przemieszczenie w osi X o 40mm w osi Y o 1mm w osi Z o 0.3mm
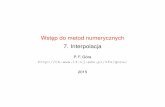
PLANE XY (XZ) (YZ) - deklaracja płaszczyzny, w której wykonywana będzie interpolacja kołowa. Po zadeklarowaniu płaszczyzny używa się komend CWABS, CCWABS, CWREL i CCWREL opisanych poniżej dzięki, którym wykonywana jest interpolacja kołowa
CWABS I... J... X... Y... – ruch roboczy z interpolacją kołową w układzie bezwzględnym (absolutnym) zgodny z ruchem wskazówek zegara. I oraz J są to parametry interpolacji (rys.5.14)
CCWABS I... J... X... Y... – ruch roboczy z interpolacją kołową w układzie bezwzględnym (absolutnym) przeciwny do ruchu wskazówek zegara. I oraz J są to parametry interpolacji
CWREL I... J... X... Y... – ruch roboczy z interpolacją kołową w układzie przyrostowym zgodny z ruchem wskazówek zegara. I oraz J są to parametry interpolacji
CCWREL I... J... X... Y... – ruch roboczy z interpolacją kołową w układzie przyrostowym przeciwny do ruchu wskazówek zegara. I oraz J są to parametry interpolacji

Y
X
A
B
C
150
90
85 165
50
70
J
I
Parametry interpolacji w układzie przyrostywym
CWREL I-65000 J20000 X-80000 Y60000 Wykonanie łuku w układzie przyrostowym
CWABS I-65000 J20000 X85000 Y150000 Wykonanie łuku w układzie absolutnym
WAIT – przestój czasowy w [ms]WAIT 2000Przestój czasowy wynoszący 2s. WP ZERO – zerowanie układu współrzędnych
WP ZERO X... Y... Z... – zerowanie układu współrzędnych aktualnego punktu. Po wywołaniu tej komendy początek lokalnego układu współrzędnych znajdował się będzie w zadeklarowanym punkcie o współrzędnych X...Y...Z...
WP ZERO X10000 Y30000 Z25000Początek lokalnego układu współrzędnych oddalonego od układu
rzeczywistego w osi X o 10mm w osi Y o 30mm w osi Z o 25mm
WPCLEAR – odwołanie komendy WP ZERO. Początek układu współrzędnych po wywołaniu tej komendy powraca do wcześniej zadeklarowanego układu współrzędnych odwołując obecny.
SPINDLE CW/CCW RPM... TIME...– włączenie obrotów CW zgodne z kierunkiem ruchu wskazówek zegara CCW przeciwne do kierunku ruchu wskazówek zegara. RPM – deklaracja obrotów wrzeciona [obr/min] (RPM0 wyłącza obroty wrzeciona), TIME - opóźnienie włączenia obrotów wrzeciona [ms]

SPINDLECW RPM1000 TIME2000Włączenie obrotów wrzeciona z opóźnieniem dwóch sekund i 1000obr/min.WPREG n X.. Y.. Z.. – deklaracja lokalnego układu współrzędnych (‘n’
numer zadeklarowanego układu współrzędnych)WPREG1 X35000 Y40000 Z2000Początek lokalnego układu współrzędnych znajduje się w punkcie o
współrzędnych X35mm Y40mm Z2mmWPREG n ACT – wywołanie zadeklarowanego układu współrzędnych (‘n’
numer wywoływanego układu współrzędnych)WPREG1 ACTWywołanie w programie zadeklarowanego lokalnego układu
współrzędnych o numerze ‘1’.VEL – deklaracja wartości posuwu roboczego w [μm/s]VEL 3000Posuw roboczy równy 3mm/sFASTVEL – deklaracja wartości posuwu w [μm/s]. Ruch szybki
FASTVEL 40000Posuw roboczy równy 40mm/sPROGEND – koniec programu.Cykle obróbkoweDRILL X... Y... – wartość przesunięcia podczas wiercenia w układzie
absolutnym [μm]. DRILLDEF P... – przesunięcie względem początku osi Z nad materiał w
miejsce gdzie ma się ustawić wiertłoDRILLDEF C1/C2/C3 – wiercenie pojedynczego otworuC1/ z
przetrzymaniem C2/ cykl wiercenia z odwiórowaniemC3DRILLDEF D... – głębokość otworu wierconego względem początku układu
odniesieniaDRILLDEF T... – czas przetrzymania na końcu wywierconego otworu w
[ms] DRILLDEF V... – posuw roboczy [μm/s].DRILLDEF F... – głębokość pierwszego wiercenia w układzie
przyrostowymDRILLDEF O... – głębokość kolejnych wierceń (przyrostowo)DRILLDEF I... – długość wycofywania przy wierceniu z odwiórowaniem
(C3).DRILLDEF R... – wartość wycofaniaDRILLDEF L... – wartość wycofania narzędzia mierzona względem
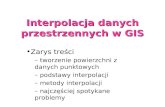
płaszczyzny referencyjnejDRILLDEF S... – pozycja wiertła po wycofaniuPrzykład wiercenia otworów (rys.5.15) z wykorzystaniem wszystkich trzech
cykli wiercenia:

30
50
70
Y
X
Z
X D
15
P F
O
V
S
Rys.5.15 Parametry dane wiercenia.DRILLDEF P3000 DRILLDEF D30000 DRILLDEF T2000 DRILLDEF V5000DRILLDEF F8000 DRILLDEF O5000 DRILLDEF I1000 DRILLDEF R1000 DRILLDEF L1000 DRILLDEF S5000 DRILLDEF C1 DRILL X30000 Y15000 DRILLDEF C2 DRILL X50000 Y15000 DRILLDEF C3 DRILL X70000 Y15000 Przy pomocy powyższego programu zostają wywiercone trzy
nieprzelotowe otwory o głębokości 30mm. Pierwszy z nich wiercony jest do końca ze stałym posuwem V=8mm/s,
Przy wierceniu drugiego otworu następuje przetrzymanie czasowe T=2s po osiągnięciu maksymalnej głębokości zaprogramowanego wiercenia ‘D’.
W przypadku wiercenia trzeciego otworu zostaje uaktywniony cykl wiercenia z odwiórowaniem. Wartości wycofań przy odwiórowaniu wynoszą I=1mm, a głębokości kolejnych zagłębień wiertła w trakcie

odwiórowania wynoszą O=5mm. Po zakończeniu wiercenia wiertło wycofuje się ponad przedmiot na wysokość S=5mm.
Przykład
A I RA I R
N00 VEL 10000N05 FASTVEL 200000N10 FASTABS Z10000
N15 FASTABS X10000 Y10000 ;Wsp. lit AN20 FASTABS Z-1000N30 MOVEREL X7500 Y20000 ;litera: AN35 MOVEREL X7500 Y-20000N40 FASTABS Z1000N45 FASTREL X-12188 Y7500 N50 MOVEABS Z-1000N55 MOVEREL X9375N60 FASTABS Z1000
N65 FASTABS X30000 Y10000 ;Wsp. lit IN70 MOVEABS Z-1000N75 MOVEREL Y20000 ;litera: IN80 FASTABS Z1000
N85 FASTABS X35000 Y10000 ;Wsp. lit RN90 MOVEABS Z-1000N95 MOVEREL Y20000 ;litera: RN100 MOVEREL X5000N105 CWREL I0 J-5000 Y-10000 N110 MOVEREL X-5000N111 MOVEABS Z1000N112 FASTREL X5000N113 MOVEABS Z-1000N115 MOVEREL X5000 Y-10000N120 FASTABS Z1000
N150 FASTABS X5000 Y0N155 MOVEABS Z-1000N160 MOVEREL X45000 Y0N165 CWREL I5000 J0 X5000 Y5000N170 MOVEREL X0 Y30000N175 CWREL I0 J5000 X-5000 Y5000N180 MOVEREL X-45000 Y0N185 CWREL I-5000 J0 X-5000 Y-5000N190 MOVEREL X0 Y-30000N195 CWREL I0 J-5000 X5000 Y-5000
N200 FASTABS Z10000N205 FASTABS X0 Y0N210 PROGEND

M i B MN00 VEL 10000N05 FASTVEL 200000N10 FASTABS Z10000
N15 FASTABS X10000 Y10000 ;Wsp. lit MN25 MOVEABS Z-1000N30 MOVEREL X0 Y20000 ;litera: MN35 MOVEREL X7000 Y-10000N35 MOVEREL X7000 Y10000N30 MOVEREL X0 Y-20000N40 MOVEABS Z1000
N45 FASTABS X30000 Y10000 ;Wsp. lit iN50 MOVEABS Z-1000N45 MOVEREL X0 Y12000 N40 MOVEABS Z1000N45 FASTREL X0 Y8000 N50 MOVEABS Z-1000N55 MOVEABS Z1000
N60 FASTABS X35000 Y10000 ;Wsp. lit BN65 MOVEABS Z-1000N70 MOVEREL X0 Y20000N75 MOVEREL X5000 Y0N80 CWREL I0 J-4000 Y-8000N85 MOVEREL X-5000 Y0N90 MOVEREL X5000 Y0N95 CWREL I0 J-6000 Y-12000N100 MOVEREL X-5000 Y0N105 MOVEABS Z1000
N110 FASTABS X50000 Y10000 ;Wsp. lit MN115 FASTABS Z1000N120 MOVEABS Z-1000N125 MOVEREL X0 Y20000 ;litera: MN130 MOVEREL X7000 Y-10000N135 MOVEREL X7000 Y10000N140 MOVEREL X0 Y-20000N145 MOVEABS Z1000
N150 FASTABS X5000 Y0N155 MOVEABS Z-1000N160 MOVEREL X65000 Y0N165 CWREL I5000 J0 X5000 Y5000N170 MOVEREL X0 Y35000N175 CWREL I0 J5000 X-5000 Y5000N180 MOVEREL X-65000 Y0N185 CWREL I-5000 J0 X-5000 Y-5000N190 MOVEREL X0 Y-35000N195 CWREL I0 J-5000 X5000 Y-5000

N200 FASTABS Z50000N205 FASTABS X0 Y0N210 PROGEND