Roboty przemysłowe MELFApgsystems.pl/pdf/roboty/mitsubishi-electric-seria-melfa-rv-3s_PL.pdf · i...
4
MITSUBISHI ELECTRIC FACTORY AUTOMATION Roboty przemysłowe MELFA
Transcript of Roboty przemysłowe MELFApgsystems.pl/pdf/roboty/mitsubishi-electric-seria-melfa-rv-3s_PL.pdf · i...

MITSUBISHIELECTRIC
FACTORY AUTOMATION
Roboty przemysłowe MELFA
MITSUBISHIELECTRIC
FACTORY AUTOMATION
Robot RV-3SB RV-3SJB
Liczba osi 6 5
Miejsce montażuMontaż na podłodze,możliwe zawieszenie na suficielub ścianie*
Konstrukcja Robot o konstrukcjiprzegubowej
Maks. / nominalny udźwig ( kg) 3,5 / 3 3,5 / 3
Dokładność powtarzania (mm) ±0,02 ±0,02
Maks. prędkość (mm/s) 5,500 5,300
Typ sterowania CR2B CR2B
Obszar ruchu(stopniekątowe)
Korpus (J1) 340 340
Ramię (J2) 225 225
Łokieć (J3) 191 237
Obrót przedramienia(J4) 320 —
Pochylenie przegubudłoni (J5) 240 240
Obrót przegubu dłoni(J6) 720 720
Prędkość ruchu(stopnikątowych/s)
Korpus (J1) 250 250
Ramię (J2) 187 187
Łokieć (J3) 250 250
Obrót przedramienia(J4) 412 —
Pochylenie przegubudłoni (J5) 412 412
Obrót przegubu dłoni(J6) 660 660
Moment zna-mionowy(Nm)
obrót przedramienia (J4) 5,83 —
pochylenie przegubudłoni (J5) 5,84 5,84
obrót przegubu dłoni (J6) 3,9 3,9
Znamionowymomentbezwładności(kgm2)
obrót przedramienia (J4) 0,137 —
pochylenie przegubudłoni (J5) 0,137 0,137
obrót przegubu dłoni (J6) 0,047 0,047
Przewód pneumatyczny do narzędzi ø6 x 2 (główny), ø4 x 8(pomocniczy jako opcja)
Ciśnienie zasilania układupneumatycznego N/cm2 0,5 ±10 %
Waga robota (kg) 37 33
Stopień ochrony/klasa czystości pomieszczenia IP65 / klasa 10**
* Montaż na ścianie z ograniczeniem zakresu J1** Wersja specjalna
Sterownik CR2B
Rodzaj sterowania PTP i CP
Liczba sterowalnych osi Maksymalnie do 6 osi równocześnie
Procesor 64 bitowy RISC CPU + DSP
Funkcje sterujące
Funkcja paletyzacji iwielozadaniowości, optymalna regu-lacja przyspieszenia/zwłoki, optymal-ne sterowanie prędkością, sterowa-nie ciągłym ruchem jednostajnym,programowalne ograniczenie mo-mentu obrotowego, regulacjazgodności XYZ, monitoring kolizji
Język programowania MELFA-Basic IV
Metoda pozycjonowania Teaching Box, MDI
Maksymalna ilość programów 88
Maksymalna ilość punktówpozycjonowania 2,500 na program
Maksymalna ilość linijek programu 5,000 na program
Ilośćwejść/wyjść
Ogólne32 wejścia/32 wyjścia(możliwość rozszerzeniado 256 wejść/wyjść)
Specjalne Definiowane przez użytkownika
dla chwytaka8 wejść/0 wyjść(opcjonalnie można dodać do ośmiusygnałów wyjściowych dłoni)
Funkcje zabezpieczające Wyłącznik awaryjny oraz układzestyku drzwi
Interfejsy/rozszerzenia
RS-232C 1 (do podłączenia komputera)
RS-422 1 (do Teaching Unit)
Przyłącze do ręki 1 (do interfejsu dłoni)
Gniazda 3 (do opcji rozszerzeń)
Pamięć 1 (do opcjonalnej kasety pamięci)
I/O-link 1 (do równoległej jednostki I/O)
Warunkiotoczenia
Temperatura 0 – 40 °C
Wilgotność 45 – 85 % wilgotność względna
Napięcie zasilania 180 – 253 V AC; jednofazowe
Pobór mocy 2,0 kVA
Wymiary zewnętrzne(szer. x wys. x gł. w mm)
Waga 35 kg
EUROPEAN REPRESENTATIVES
AUSTRIAGEVA GmbHWiener Straße 89AT-2500 BadenPhone: +43 (0) 2252 / 85 55 20
BELGIUMKoning & Hartman b.v.Woluwelaan 31BE-1800 VilvoordePhone: +32 (0)2 / 257 02 40
CZECH REPUBLICB:TECH A.S.Na Ostrove 84CZ - 58001 Havlickuv BrodPhone: +420 (0)569 / 408 841
DENMARKlouis poulsenGeminivej 32DK-2670 GrevePhone: +45 (0)70 / 10 15 35
FINLANDBeijer Electronics OYAnsatie 6aFIN-01740 VantaaPhone: +358 (0) 9 / 886 77 500
GREECEKouvalias25, El. Venizelou AveGR-17671 KallitheaPhone: +302 (0) 2950 / 42902/3/4
HUNGARYAxicont Automatika Kft.Reitter F.U.132HU-1131 BudapestPhone: +36 (0)1 / 412-0882
ISRAELIlan & Gavish Ltd.24 Shenkar St., Kiryat ArieIL-49001 Petach-TiqvaPhone: +972 (0)3 / 922 18 24
NETHERLANDSKoning & Hartman b.v.Haarlerbergweg 21-23NL-1101 CH AmsterdamPhone: +31 (0)20 / 587 76 00
NORWAYBeijer Electronics ASTeglverksveien 1NO-3002 DrammenPhone +47 (0) 32 / 24 30 00
POLANDMPL Technology Sp.z o.o.Ul.Krakowska 50PL-32-083 BalicePhone: +48 (0)12 / 630 47 00
SERBIAINEA SR D.O.O.Karadjordjeva 12/260SER-113000 SmederevoPhone: +381 (0)26 / 617 163
SLOVAKIAAutoCont ControlRadlinského 47SK-02601 Dolný KubínPhone: +421 (0)43 / 5868 210
SLOVAKIACS MTRADE SLOVENSKOVajanskeho 58SK-92101 PiestanyPhone: +421 (0)33 / 7742 760
SLOVENIAINEA d.o.o.Stegne 11SI-1000 LjubljanaPhone +386 (0) 1 / 5 13 81 00
SWEDENBeijer Electronics ABBox 426S-20124 MalmöPhone +46 (0) 40 / 35 86 00
SWITZERLANDECONOTEC AGPostfach 282CH-8309 NürensdorfPhone +41 (0) 44 / 8 38 48 11
TURKEYGTSDarülaceze Cad.No.43A KAT:2TR-80270 Okmeydani-IstanbulPhone +90 (0) 212 / 3 20 16 40
RUSSIACONSYSPromyshlennaya st.42RU-198099 St. PetersburgPhone: +7 812 / 325 36 53
RUSSIAELEKTROSTYLEPoslannikov Per., 9, Str.1RU-107005 MoscowPhone +7 095 / 542-4323
RUSSIAICOSRyazanskij Prospekt, 8A, Office 100RU-109428 MoscowPhone +7 095 / 232 0207
SOUTH AFRICACBI LtdPrivate Bag 2016ZA-1600 IsandoPhone +27 (0) 11 / 9 28 20 00
EUROPEAN BRANCHES
FRANCEMITSUBISHI ELECTRIC EUROPE B.V.25, Boulevard des BouvetsF-92741 Nanterre CedexPhone +33 (0) 1 55 68 55 68
GERMANYMITSUBISHI ELECTRIC EUROPE B.V.Gothaer Straße 8D-40880 RatingenPhone +49 (0) 21 02/4 86-0
IRELANDMITSUBISHI ELECTRIC EUROPE B.V.Westgate Business Park, BallymountIRL-Dublin 24Phone: +353 (0)1 4198800
ITALYMITSUBISHI ELECTRIC EUROPE B.V.Viale Colleoni 7I-20041 Agrate Brianza (MI)Phone: +39 039 / 60 53 1
SPAINMITSUBISHI ELECTRIC EUROPE B.V.Carretera de Rubi, 76-80E-08190 Sant Cugat del VallésPhone +34 93/5 65 31 60
UKMITSUBISHI ELECTRIC EUROPE B.V.Travellers LaneGB-Hatfield Herts. AL10 8 XBPhone +44 (0) 1707/27 61 00
Mitsubishi Electric Europe B.V. /// FA - European Business Group /// Gothaer Straße 8 /// D-40880 Ratingen /// GermanyTel.: +49(0)2102-4860 /// Fax: +49(0)2102-486112 /// [email protected] /// www.mitsubishi-automation.com
Wszystkie znaki towarowe podlegają ochronie praw autorskich.Specyfikacje mogą ulec zmianie bez powiadomienia /// Nr art. 201300-A /// 12.2006

Roboty mogą być bardzo korzystną alter-natywą cenową przy realizacji różnych zadańz zakresu automatyzacji. Opinia, że robotyto drogi luksus jest daleka od rzeczywistości.Jeżeli rozpatrywać będziemy koszty robotaw odniesieniu do okresu jego użytkowania,który w tradycyjnych zastosowaniach wy-nosi ok. 6-7 lat, to będziemy zaskoczeni nie-wielkimi kosztami na zakup i eksploatacjęrobota wynoszącymi jedynie 1,65 Euro/go-dzinę.
Programowanie ramienia robota Mitsubishijest znacznie prostsze niż się to wydaje. Ję-zyk programowania składa się z prostych,zbliżonych do zdań elementów. I tak np. in-strukcja MOV powoduje poruszenie się ro-bota.
Ponadto użytkownik może mieć wiele ko-rzyści z zastosowania rozbudowanych pa-kietów oprogramowania do programowaniai symulacji Cosirop oraz Cosimir. Oba pakietyoprogramowania pozwalają na projektowa-nie i symulację zastosowania robotów jesz-cze przed zakupem rozpatrywanego sprzętu.
Roboty serii RV-3S opracowane zostały zmyślą o prostej integracji z istniejącą ko-mórką produkcyjną. I tak na przykład 32wbudowane wejścia i wyjścia pozwalają nabezpośrednią współpracę z czujnikami iorganami wykonawczymi, co prowadzi dokrótszego czasu cyklów oraz prostszej kon-strukcji systemu.
Kolejnym, ważnym wymogiem stawianymkażdej komórce produkcyjnej jest jej zdolnośćdo komunikowania się z innymi jednostkamiautomatyki. Seria RV-3S przystosowana jestdo podłączenia do trzech najważniejszychtypów sieci: Ethernet, Profibus/DP orazCC-Link.
W wypadku złożonych komórek produk-cyjnych o ograniczonej przestrzeni ruchu,lub w wypadku punktów pracy leżących wdużej odległości od siebie, RV-3S może ste-rować aż do 8 dodatkowymi osiami. Ponie-waż dwie z tych osi mogą pracować inter-polacyjnie, możliwe jest nieskomplikowane iefektywne sterowanie ruchem w celu omi-jania przeszkód. Pozostałe 6 osi pozwalanp. na sterowanie osią liniową, aby robotmógł poruszać się pomiędzy różnymipunktami jego zastosowania.
Ulepszone wyposażenie RV-3S to zwięk-szona elastyczność użytkowania w zakresiejego rozwiązań automatyzacji. Stopieńochrony IP 65 umożliwia zastosowanie nietylko przy maszynie lub na stanowiskupracy, ale również bezpośrednio w ma-szynie. Jest to szczególnie przydatna cechaw wypadku zastosowania w obrabiarkachdo obróbki skrawaniem, w których wys-tępują oleje chłodząco-smarujące.
Wszystkie dostarczane sterowniki Mitsubishiwyposażone są standardowo w kompletneoprogramowanie sterujące. Oznacza to, żeużytkownik nie musi kupować żadnych do-datkowych modułów oprogramowania dozastosowań specjalnych. Również wprzyszłości.
Ponadto, wszystkie programy do robotówMitsubishi MELFA są kompatybilne, a więcmożliwe jest ich bezproblemowe dosto-sowanie do danego robota.
� Najszybszy w swojej klasie
Roboty serii RV-3S są do 57 % szybsze od po-przednich modeli tej samej klasy. Maksy-malna prędkość postępowa wynosząca 5,5m/s może być nadal wykorzystywana przydokładności pozycjonowania wynoszącej±0,02 mm. Wynikają z tego krótsze czasytrwania cyklów bez równoczesnej utratydokładności.
Roboty na linii produkcyjnej
� Punkty osobliwe
Z reguły, roboty zatrzymują się jak tylkoznajdą się w pobliżu punktu osobliwego.Nowy robot RV-3S kontynuuje jednak swójruch aż do osiągnięcia położenia docelo-wego, co przyczynia się do niezakłóconegoprzebiegu pracy.
� Wszystkie osie z hamulcami
W wielu robotach tylko osie główne wy-posażone są w hamulce. W wypadku RV-3Swszystkie osie wyposażone są w hamulce.Oznacza to, że robot zachowuje swojąpozycję również w wypadku zaniku zasila-nia lub uruchomienia wyłącznika bezpie-czeństwa, co stanowi zabezpieczenie dlacałej instalacji.
Roboty te nadal wyposażone są w enkoderypołożenia bezwzględnego. Dzięki temu ak-tualna pozycja znana jest w każdej chwilibez konieczności przejazdu do punktu re-ferencyjnego.
� Kompensacja tolerancji wymiarówobrabianego przedmiotu
Funkcja ta umożliwia prowadzenie ramieniarobota podczas wchodzenia w obrabianyprzedmiot z wykorzystaniem sił zewnętrz-nych.
Na przykład, podczas wkładania sworznia wotwór, którego pozycja ze względu na tole-rancję wymiarów się zmienia, ramię robotamoże być wprowadzone w otwór poprzezuchwycenie krawędzi otworu. Dzięki temunawet w wypadku różnic wynikających z to-lerancji obrabianego przedmiotu zagwa-rantowane jest stuprocentowe pozycjono-wanie.
� Monitorowanie kolizji
Funkcja monitorowania kolizji służy zabez-pieczeniu całej instalacji, gdyż zderzenia sąbezpośrednio rejestrowane umożliwiającszybką reakcję. Nie może więc dojść dopowstania dużych, niszczących sił.
Wygląd ekranu programu Cosimir
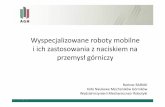
RV-3SB w obrabiarce do obróbki elektroiskrowej
§
©
Š
‡
ˆ
©
ŠŠ ˆˆ
‰ Š ‰
©
‰
‰
Š
©
Œ
‹
©
Š
‡
ˆ
©
Š
‡
ˆ
ˆ
Š
Œ
æ
ˆ
‡
‡
æ
ˆ
Š
æ
©
Š
Š
‡
æ
Œ
©
‹
ˆ
ˆ
‡
æ
ˆ
‡
æ
©
Š
ˆ
©
‰
‡
Š
Š‰
‰
ˆ‡
§ „
«
§
Š
Š
Š
Š
ˆ
ˆ
ˆ
ˆ
‰
‰
‰
‰
§
© ¼
À Å
«
§450
R339
330232
170°
R24
5
312
322
350
245
218
R30
1
R301
R641R
203
R319
R301
641
‹Œ
102
©
ˆ
‰‰ ŠŠ ‡‡
§
300
©
‰
‰
‰
2010
5
7064
‰‰ Š Š ‡‰‰ Š Š ‡‡
85
R
P
72
R94R546
ˆ Œ ‡
‹‹ ‰‰
‰‰ ˆˆ
©
Œ
‹
©
ˆ
©
Š
‡
‰
‰‹
Œ
‡
æ
ˆ
Š
Œ
æ
ˆ
ˆ
æ
‹‹ ‡‡
‰‰ ŠŠ ‡‡
©
‹
‰
ˆ
‡
æ
ˆ
‡
æ
©
‰
ˆ
©
‰
‡
Š
Š‰
‰
ˆ‡
§
«
§
‰
‡
æ
ŠŠ
ˆˆ
‰‰
Š Š ‡
§
©
À
§
Å ¾¾ ÃÃ ¼¼ ww
Ë ¼¼ ˆˆ
¼ ww
“
¥
w
¥
w
330
230
23040
312
271
642
102
109
R176R547
ŠŠ
ˆˆ
‰‰
350
ŠŠ
ˆˆ
‰‰
245
170°
R64
2
R27
1R203
322
©
‰
‰
‰
‰
135
105
7064
‰‰ Š Š ‡‡
120‰‰ Š Š ‡‡
85R
P72
RV-3SB RV-3SJB
Przestrzeń robocza w odniesieniu do punktu P
Przestrzeń robocza wodniesieniu do punktu P
Ograniczenieobszaru P
Kąt graniczny 2
Ograniczenieobszaru P
Kąt graniczny 1 strony przedniej
Kąt graniczny 2 strony przedniej
Ograniczenieobszaru P
Kąt graniczny 1
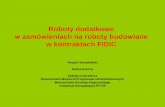
Wymiary zewnętrzne oraz obszar ruchu ramienia robota
120130
104109
190
Wartość granicznanachylenia przegubu dłoni
120130
104109
190
Ramię łamane robota RV-3SB/RV-3SJB oraz urządzenie sterujące CR2B
Wartość granicznanachylenia przegubu dłoni
Kąt graniczny strony przedniej
Ograniczenieobszaru P
Przestrzeń robocza w odniesieniu do punktu P
Kąt granicznyobszaru ruchu
Przestrzeń robocza wodniesieniu do punktu P

Roboty mogą być bardzo korzystną alter-natywą cenową przy realizacji różnych zadańz zakresu automatyzacji. Opinia, że robotyto drogi luksus jest daleka od rzeczywistości.Jeżeli rozpatrywać będziemy koszty robotaw odniesieniu do okresu jego użytkowania,który w tradycyjnych zastosowaniach wy-nosi ok. 6-7 lat, to będziemy zaskoczeni nie-wielkimi kosztami na zakup i eksploatacjęrobota wynoszącymi jedynie 1,65 Euro/go-dzinę.
Programowanie ramienia robota Mitsubishijest znacznie prostsze niż się to wydaje. Ję-zyk programowania składa się z prostych,zbliżonych do zdań elementów. I tak np. in-strukcja MOV powoduje poruszenie się ro-bota.
Ponadto użytkownik może mieć wiele ko-rzyści z zastosowania rozbudowanych pa-kietów oprogramowania do programowaniai symulacji Cosirop oraz Cosimir. Oba pakietyoprogramowania pozwalają na projektowa-nie i symulację zastosowania robotów jesz-cze przed zakupem rozpatrywanego sprzętu.
Roboty serii RV-3S opracowane zostały zmyślą o prostej integracji z istniejącą ko-mórką produkcyjną. I tak na przykład 32wbudowane wejścia i wyjścia pozwalają nabezpośrednią współpracę z czujnikami iorganami wykonawczymi, co prowadzi dokrótszego czasu cyklów oraz prostszej kon-strukcji systemu.
Kolejnym, ważnym wymogiem stawianymkażdej komórce produkcyjnej jest jej zdolnośćdo komunikowania się z innymi jednostkamiautomatyki. Seria RV-3S przystosowana jestdo podłączenia do trzech najważniejszychtypów sieci: Ethernet, Profibus/DP orazCC-Link.
W wypadku złożonych komórek produk-cyjnych o ograniczonej przestrzeni ruchu,lub w wypadku punktów pracy leżących wdużej odległości od siebie, RV-3S może ste-rować aż do 8 dodatkowymi osiami. Ponie-waż dwie z tych osi mogą pracować inter-polacyjnie, możliwe jest nieskomplikowane iefektywne sterowanie ruchem w celu omi-jania przeszkód. Pozostałe 6 osi pozwalanp. na sterowanie osią liniową, aby robotmógł poruszać się pomiędzy różnymipunktami jego zastosowania.
Ulepszone wyposażenie RV-3S to zwięk-szona elastyczność użytkowania w zakresiejego rozwiązań automatyzacji. Stopieńochrony IP 65 umożliwia zastosowanie nietylko przy maszynie lub na stanowiskupracy, ale również bezpośrednio w ma-szynie. Jest to szczególnie przydatna cechaw wypadku zastosowania w obrabiarkachdo obróbki skrawaniem, w których wys-tępują oleje chłodząco-smarujące.
Wszystkie dostarczane sterowniki Mitsubishiwyposażone są standardowo w kompletneoprogramowanie sterujące. Oznacza to, żeużytkownik nie musi kupować żadnych do-datkowych modułów oprogramowania dozastosowań specjalnych. Również wprzyszłości.
Ponadto, wszystkie programy do robotówMitsubishi MELFA są kompatybilne, a więcmożliwe jest ich bezproblemowe dosto-sowanie do danego robota.
� Najszybszy w swojej klasie
Roboty serii RV-3S są do 57 % szybsze od po-przednich modeli tej samej klasy. Maksy-malna prędkość postępowa wynosząca 5,5m/s może być nadal wykorzystywana przydokładności pozycjonowania wynoszącej±0,02 mm. Wynikają z tego krótsze czasytrwania cyklów bez równoczesnej utratydokładności.
Roboty na linii produkcyjnej
� Punkty osobliwe
Z reguły, roboty zatrzymują się jak tylkoznajdą się w pobliżu punktu osobliwego.Nowy robot RV-3S kontynuuje jednak swójruch aż do osiągnięcia położenia docelo-wego, co przyczynia się do niezakłóconegoprzebiegu pracy.
� Wszystkie osie z hamulcami
W wielu robotach tylko osie główne wy-posażone są w hamulce. W wypadku RV-3Swszystkie osie wyposażone są w hamulce.Oznacza to, że robot zachowuje swojąpozycję również w wypadku zaniku zasila-nia lub uruchomienia wyłącznika bezpie-czeństwa, co stanowi zabezpieczenie dlacałej instalacji.
Roboty te nadal wyposażone są w enkoderypołożenia bezwzględnego. Dzięki temu ak-tualna pozycja znana jest w każdej chwilibez konieczności przejazdu do punktu re-ferencyjnego.
� Kompensacja tolerancji wymiarówobrabianego przedmiotu
Funkcja ta umożliwia prowadzenie ramieniarobota podczas wchodzenia w obrabianyprzedmiot z wykorzystaniem sił zewnętrz-nych.
Na przykład, podczas wkładania sworznia wotwór, którego pozycja ze względu na tole-rancję wymiarów się zmienia, ramię robotamoże być wprowadzone w otwór poprzezuchwycenie krawędzi otworu. Dzięki temunawet w wypadku różnic wynikających z to-lerancji obrabianego przedmiotu zagwa-rantowane jest stuprocentowe pozycjono-wanie.
� Monitorowanie kolizji
Funkcja monitorowania kolizji służy zabez-pieczeniu całej instalacji, gdyż zderzenia sąbezpośrednio rejestrowane umożliwiającszybką reakcję. Nie może więc dojść dopowstania dużych, niszczących sił.
Wygląd ekranu programu Cosimir
RV-3SB w obrabiarce do obróbki elektroiskrowej
§
©
Š
‡
ˆ
©
ŠŠ ˆˆ
‰ Š ‰
©
‰
‰
Š
©
Œ
‹
©
Š
‡
ˆ
©
Š
‡
ˆ
ˆ
Š
Œ
æ
ˆ
‡
‡
æ
ˆ
Š
æ
©
Š
Š
‡
æ
Œ
©
‹
ˆ
ˆ
‡
æ
ˆ
‡
æ
©
Š
ˆ
©
‰
‡
Š
Š‰
‰
ˆ‡
§ „
«
§
Š
Š
Š
Š
ˆ
ˆ
ˆ
ˆ
‰
‰
‰
‰
§
© ¼
À Å
«
§450
R339
330232
170°
R24
5
312
322
350
245
218
R30
1
R301
R641R
203
R319
R301
641
‹Œ
102
©
ˆ
‰‰ ŠŠ ‡‡
§
300
©
‰
‰
‰
2010
5
7064
‰‰ Š Š ‡‰‰ Š Š ‡‡
85
R
P
72
R94R546
ˆ Œ ‡
‹‹ ‰‰
‰‰ ˆˆ
©
Œ
‹
©
ˆ
©
Š
‡
‰
‰‹
Œ
‡
æ
ˆ
Š
Œ
æ
ˆ
ˆ
æ
‹‹ ‡‡
‰‰ ŠŠ ‡‡
©
‹
‰
ˆ
‡
æ
ˆ
‡
æ
©
‰
ˆ
©
‰
‡
Š
Š‰
‰
ˆ‡
§
«
§
‰
‡
æ
ŠŠ
ˆˆ
‰‰
Š Š ‡
§
©
À
§
Å ¾¾ ÃÃ ¼¼ ww
Ë ¼¼ ˆˆ
¼ ww
“
¥
w
¥
w
330
230
23040
312
271
642
102
109
R176R547
ŠŠ
ˆˆ
‰‰
350
ŠŠ
ˆˆ
‰‰
245
170°
R64
2
R27
1R203
322
©
‰
‰
‰
‰
135
105
7064
‰‰ Š Š ‡‡
120‰‰ Š Š ‡‡
85R
P
72
RV-3SB RV-3SJB
Przestrzeń robocza w odniesieniu do punktu P
Przestrzeń robocza wodniesieniu do punktu P
Ograniczenieobszaru P
Kąt graniczny 2
Ograniczenieobszaru P
Kąt graniczny 1 strony przedniej
Kąt graniczny 2 strony przedniej
Ograniczenieobszaru P
Kąt graniczny 1
Wymiary zewnętrzne oraz obszar ruchu ramienia robota
120130
104109
190
Wartość granicznanachylenia przegubu dłoni
120130
104109
190
Ramię łamane robota RV-3SB/RV-3SJB oraz urządzenie sterujące CR2B
Wartość granicznanachylenia przegubu dłoni
Kąt graniczny strony przedniej
Ograniczenieobszaru P
Przestrzeń robocza w odniesieniu do punktu P
Kąt granicznyobszaru ruchu
Przestrzeń robocza wodniesieniu do punktu P

MITSUBISHIELECTRIC
FACTORY AUTOMATION
Roboty przemysłowe MELFA
MITSUBISHIELECTRIC
FACTORY AUTOMATION
Robot RV-3SB RV-3SJB
Liczba osi 6 5
Miejsce montażuMontaż na podłodze,możliwe zawieszenie na suficielub ścianie*
Konstrukcja Robot o konstrukcjiprzegubowej
Maks. / nominalny udźwig ( kg) 3,5 / 3 3,5 / 3
Dokładność powtarzania (mm) ±0,02 ±0,02
Maks. prędkość (mm/s) 5,500 5,300
Typ sterowania CR2B CR2B
Obszar ruchu(stopniekątowe)
Korpus (J1) 340 340
Ramię (J2) 225 225
Łokieć (J3) 191 237
Obrót przedramienia(J4) 320 —
Pochylenie przegubudłoni (J5) 240 240
Obrót przegubu dłoni(J6) 720 720
Prędkość ruchu(stopnikątowych/s)
Korpus (J1) 250 250
Ramię (J2) 187 187
Łokieć (J3) 250 250
Obrót przedramienia(J4) 412 —
Pochylenie przegubudłoni (J5) 412 412
Obrót przegubu dłoni(J6) 660 660
Moment zna-mionowy(Nm)
obrót przedramienia (J4) 5,83 —
pochylenie przegubudłoni (J5) 5,84 5,84
obrót przegubu dłoni (J6) 3,9 3,9
Znamionowymomentbezwładności(kgm2)
obrót przedramienia (J4) 0,137 —
pochylenie przegubudłoni (J5) 0,137 0,137
obrót przegubu dłoni (J6) 0,047 0,047
Przewód pneumatyczny do narzędzi ø6 x 2 (główny), ø4 x 8(pomocniczy jako opcja)
Ciśnienie zasilania układupneumatycznego N/cm2 0,5 ±10 %
Waga robota (kg) 37 33
Stopień ochrony/klasa czystości pomieszczenia IP65 / klasa 10**
* Montaż na ścianie z ograniczeniem zakresu J1** Wersja specjalna
Sterownik CR2B
Rodzaj sterowania PTP i CP
Liczba sterowalnych osi Maksymalnie do 6 osi równocześnie
Procesor 64 bitowy RISC CPU + DSP
Funkcje sterujące
Funkcja paletyzacji iwielozadaniowości, optymalna regu-lacja przyspieszenia/zwłoki, optymal-ne sterowanie prędkością, sterowa-nie ciągłym ruchem jednostajnym,programowalne ograniczenie mo-mentu obrotowego, regulacjazgodności XYZ, monitoring kolizji
Język programowania MELFA-Basic IV
Metoda pozycjonowania Teaching Box, MDI
Maksymalna ilość programów 88
Maksymalna ilość punktówpozycjonowania 2,500 na program
Maksymalna ilość linijek programu 5,000 na program
Ilośćwejść/wyjść
Ogólne32 wejścia/32 wyjścia(możliwość rozszerzeniado 256 wejść/wyjść)
Specjalne Definiowane przez użytkownika
dla chwytaka8 wejść/0 wyjść(opcjonalnie można dodać do ośmiusygnałów wyjściowych dłoni)
Funkcje zabezpieczające Wyłącznik awaryjny oraz układzestyku drzwi
Interfejsy/rozszerzenia
RS-232C 1 (do podłączenia komputera)
RS-422 1 (do Teaching Unit)
Przyłącze do ręki 1 (do interfejsu dłoni)
Gniazda 3 (do opcji rozszerzeń)
Pamięć 1 (do opcjonalnej kasety pamięci)
I/O-link 1 (do równoległej jednostki I/O)
Warunkiotoczenia
Temperatura 0 – 40 °C
Wilgotność 45 – 85 % wilgotność względna
Napięcie zasilania 180 – 253 V AC; jednofazowe
Pobór mocy 2,0 kVA
Wymiary zewnętrzne(szer. x wys. x gł. w mm)
Waga 35 kg
EUROPEAN REPRESENTATIVES
AUSTRIAGEVA GmbHWiener Straße 89AT-2500 BadenPhone: +43 (0) 2252 / 85 55 20
BELGIUMKoning & Hartman b.v.Woluwelaan 31BE-1800 VilvoordePhone: +32 (0)2 / 257 02 40
CZECH REPUBLICB:TECH A.S.Na Ostrove 84CZ - 58001 Havlickuv BrodPhone: +420 (0)569 / 408 841
DENMARKlouis poulsenGeminivej 32DK-2670 GrevePhone: +45 (0)70 / 10 15 35
FINLANDBeijer Electronics OYAnsatie 6aFIN-01740 VantaaPhone: +358 (0) 9 / 886 77 500
GREECEKouvalias25, El. Venizelou AveGR-17671 KallitheaPhone: +302 (0) 2950 / 42902/3/4
HUNGARYAxicont Automatika Kft.Reitter F.U.132HU-1131 BudapestPhone: +36 (0)1 / 412-0882
ISRAELIlan & Gavish Ltd.24 Shenkar St., Kiryat ArieIL-49001 Petach-TiqvaPhone: +972 (0)3 / 922 18 24
NETHERLANDSKoning & Hartman b.v.Haarlerbergweg 21-23NL-1101 CH AmsterdamPhone: +31 (0)20 / 587 76 00
NORWAYBeijer Electronics ASTeglverksveien 1NO-3002 DrammenPhone +47 (0) 32 / 24 30 00
POLANDMPL Technology Sp.z o.o.Ul.Krakowska 50PL-32-083 BalicePhone: +48 (0)12 / 630 47 00
SERBIAINEA SR D.O.O.Karadjordjeva 12/260SER-113000 SmederevoPhone: +381 (0)26 / 617 163
SLOVAKIAAutoCont ControlRadlinského 47SK-02601 Dolný KubínPhone: +421 (0)43 / 5868 210
SLOVAKIACS MTRADE SLOVENSKOVajanskeho 58SK-92101 PiestanyPhone: +421 (0)33 / 7742 760
SLOVENIAINEA d.o.o.Stegne 11SI-1000 LjubljanaPhone +386 (0) 1 / 5 13 81 00
SWEDENBeijer Electronics ABBox 426S-20124 MalmöPhone +46 (0) 40 / 35 86 00
SWITZERLANDECONOTEC AGPostfach 282CH-8309 NürensdorfPhone +41 (0) 44 / 8 38 48 11
TURKEYGTSDarülaceze Cad.No.43A KAT:2TR-80270 Okmeydani-IstanbulPhone +90 (0) 212 / 3 20 16 40
RUSSIACONSYSPromyshlennaya st.42RU-198099 St. PetersburgPhone: +7 812 / 325 36 53
RUSSIAELEKTROSTYLEPoslannikov Per., 9, Str.1RU-107005 MoscowPhone +7 095 / 542-4323
RUSSIAICOSRyazanskij Prospekt, 8A, Office 100RU-109428 MoscowPhone +7 095 / 232 0207
SOUTH AFRICACBI LtdPrivate Bag 2016ZA-1600 IsandoPhone +27 (0) 11 / 9 28 20 00
EUROPEAN BRANCHES
FRANCEMITSUBISHI ELECTRIC EUROPE B.V.25, Boulevard des BouvetsF-92741 Nanterre CedexPhone +33 (0) 1 55 68 55 68
GERMANYMITSUBISHI ELECTRIC EUROPE B.V.Gothaer Straße 8D-40880 RatingenPhone +49 (0) 21 02/4 86-0
IRELANDMITSUBISHI ELECTRIC EUROPE B.V.Westgate Business Park, BallymountIRL-Dublin 24Phone: +353 (0)1 4198800
ITALYMITSUBISHI ELECTRIC EUROPE B.V.Viale Colleoni 7I-20041 Agrate Brianza (MI)Phone: +39 039 / 60 53 1
SPAINMITSUBISHI ELECTRIC EUROPE B.V.Carretera de Rubi, 76-80E-08190 Sant Cugat del VallésPhone +34 93/5 65 31 60
UKMITSUBISHI ELECTRIC EUROPE B.V.Travellers LaneGB-Hatfield Herts. AL10 8 XBPhone +44 (0) 1707/27 61 00
Mitsubishi Electric Europe B.V. /// FA - European Business Group /// Gothaer Straße 8 /// D-40880 Ratingen /// GermanyTel.: +49(0)2102-4860 /// Fax: +49(0)2102-486112 /// [email protected] /// www.mitsubishi-automation.com
Wszystkie znaki towarowe podlegają ochronie praw autorskich.Specyfikacje mogą ulec zmianie bez powiadomienia /// Nr art. 201300-A /// 12.2006