ŚRODOWISKO MATLAB cz.2 Macierze – wykorzystanie operatorów ...
5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 1/11
Ostatnia aktualizacja: 2010-03-01 M. Tomera 1
Akademia Morska w GdyniKatedra Automatyki Okr ętowej
Teoria sterowania
Rachunek operatorowy − Matlab
Mirosław Tomera
Rachunek operatorowy jest jednym z narzędzi matematycznych służą cych do rozwią zywanialiniowych równań różniczkowych zwyczajnych. W porównaniu z metodą klasyczną , metoda
transformaty operatorowej przekształca równanie różniczkowe zwyczajne w równanie algebraiczne,którego zmienną jest operator Laplace'a s. Wówczas, w celu uzyskania rozwią zania w dziedzinieoperatora s przekształca się równanie algebraiczne przy użyciu prostych reguł matematycznych.
Ostateczne rozwią zanie równania różniczkowego uzyskiwane jest poprzez zastosowanie odwrotnejtransformaty Laplace'a. Podstawowe własności transformaty Laplace'a zebrane zostały w tabeli 1,
natomiast transformaty operatorowe najpopularniejszych funkcji w tabeli 2.
1. ROZKŁAD FUNKCJI OPERATOROWEJ NA UŁAMKI ZWYKŁE
Rozważ nastę pują cą funkcję operatorową zapisaną w postaci ilorazu dwóch wielomianów B( s)/ A( s):
0
1
1
01
1
...
...
)(
)(
a sa sa
b sb sb
s A
s Bn
n
n
n
mm
mm
+++
+++==
−
−
−−
den
num(1)
w których niektóre ze współczynników ia oraz jb mogą być równe zero. W MATLABIE wektory
wierszowe num oraz den określają współczynniki licznika i mianownika transmitancji. Wobec tego
[ ]01 ... bbb mm −=num
[ ]01 ... aaa nn −=den
Polecenie
[ ] ( )dennum,residuekp,r, = (2)
wyznacza residua r, bieguny p oraz współczynniki stałe k rozk ładu funkcji operatorowej na ułamki
proste ilorazu dwóch wielomianów B( s)/ A( s). Rozk ład na ułamki proste ilorazu wielomianów
B( s)/ A( s) jest wówczas nastę pują cy:
( )( )
( )( )
( )( )
k n p s
nr
p s
r
p s
r
s A
s B+
−++
−+
−== ...
2
2
1
1
)(
)(
den
num(3)
Przyk ład 1
Dokonaj rozk ładu na ułamki proste nastę pują cej funkcji operatorowej
1330226
42123
)(
)()(
234
2
++++
++===
s s s s
s s
sM
s L sG
den
num(1.1)
Rozwią zanie: Dla tej funkcji operatorowej zapis w MATLABIE jest nastę pują cy

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 2/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 2
>> num = [3 12 42]
>> den = [1 6 22 30 13]
zastosowanie polecenia
>> [r, p, k] = residue( num, den)
daje nastę puj
ą ce wyniki
r =
0.0300 + 0.0400i
0.0300 - 0.0400i
-0.0600
3.3000
p =
-2.0000 + 3.0000i
-2.0000 - 3.0000i
-1.0000
-1.0000
k =
[]
(Zauważ, że residua zwracane są w wektorze kolumnowym r, położenia biegunów w wektorze
kolumnowym p, a część całkowita w wektorze wierszowym k). Powyższy zapis w MATLABIE
odpowiada nastę pują cemu rozk ładowi na ułamki zwyk łe funkcji operatorowej (1.1):
( ) ( ) ( )2234
2
1
3.3
1
06.0
32
04.003.0
32
04.003.0
1330226
42122)(
++
+−
+−−−
−+
+−−+
=++++
++=
s s j s
j
j s
j
s s s s
s s sG (1.2)
Polecenie residue może być również używane do przekształcenia funkcji operatorowej
rozłożonej na ułamki proste na postać ilorazu dwóch wielomianów (licznika i mianownika).Polecenie to jest nastę pują ce:
>> [num1, den1] = residue(r, p, k)
gdzie wektory r, p, k mają wartości uzyskane z powyższego rozk ładu (1.2). Polecenie
>> printsys(num1, den1, ’s’)
wypisuje iloraz wielomianów w zależności od zmiennej s.
num/den =
3 s^2 + 12 s + 42
-----------------------------------
s^4 + 6 s^3 + 22 s^2 + 30 s + 13
czyli ta funkcja operatorowa ma tak ą samą postać jak funkcja wyjściowa opisana wzorem (1.1).
2. ZNAJDOWANIE ODWROTNYCH TRANSFORMAT LAPLACE'A
Znajdowanie odwrotnych transformat Laplace’a odbywa się przez rozk ład funkcji operatorowej naułamki zwyk łe i znalezienie odpowiadają cej jej funkcji czasowej przez zastosowanie transformatfunkcji znajdują cych się w tabeli 2. Przyk ład 2ilustruje tę metodę.

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 3/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 3
Tabela 1. Podstawowe własności transformaty Laplace’a
1. Liniowość
£ { 1af (t ) + 2bf (t )} = 1aF ( s) + 2bF ( s), a, b – stałe
2. Całkowanie w dziedzinie rzeczywistej
£
∫ ∞−
t
dt t f )( = s
s F )(+ ∫
−
∞−
0
)(1
dt t f s
3. Różniczkowanie w dziedzinie rzeczywistej
£ ∑−
=
−−−=
1
0
)(1)0()(
)( n
k
k k nn
n
n
f s s F sdt
t f d
3.a. pierwsza pochodna
£ )0()()(
f s sF dt
t df −=
3.b. druga pochodna
£ )0()0()()( )1(2
2
2
f sf s F sdt
t f d −−=
4. Całkowanie w dziedzinie zespolonej (zmiennej s)
£ sd s F t
t f
s
∫ ∞
=
)()(
5. Różniczkowanie w dziedzinie zespolonej (zmiennej s)
£ { })(t f t n = ( )n1−
n
n
ds
s F d )(
6. Przesunięcie w dziedzinie rzeczywistej
£ { f (t − T )}= )( s F e sT − , T jest stałą
7. Twierdzenie o wartości począ tkowej
)(lim)(lim0
s sF t f st ∞→→
=
8. Twierdzenie o wartości końcowej
)(lim)(lim0
s sF t f st →∞→
=
9. Przesunięcie w dziedzinie zespolonej (zmiennej s)
£ { })(t f eat = F ( s− a)
10. Zmiana skali
£ { f (at )} =
a
s F
a
1, a jest stałą dodatnią
11. Splot funkcji (twierdzenie Borela)
£ { })()( 21 t f t f ∗ = )()( 21 s F s F , gdzie )()( 21 t f t f ∗ = ∫ −
−t
d t f f
0
21 )()( τ τ τ

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 4/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 4
Tabela 2. Wybrane transformaty Laplace’a
f (t ) F ( s)
1. )(t δ (impuls jednostkowy) 1
2. )(1 t (skok jednostkowy) s
1
3. ( ) ( ) ( )t kT t t
k
T 10
⋅−= ∑∞
=
δ δ Tse−−1
1
4. ( )t t 1⋅ 2
1
s
5. ( )t t 12
1 2 ⋅3
1
s
6. ( )t t n
n 1!
1 ⋅1
1+n
s
7. ( )t e t 1⋅−σ σ + s
1
8. ( )t tet
1⋅−σ ( )2
1
σ + s
9. ( )t et n
t n 1!
1⋅−σ ( ) 1
1++ n
s σ
10. ( )t t 1sin ⋅ω 22 ω
ω
+ s
11. ( )t t 1cos ⋅ω 22 ω + s
s
12. ( )t t t 1sin ⋅ω ( )222
2
ω
ω
+ s
s
13. ( )t t t 1cos ⋅ω ( )222
22
ω
ω
+
−
s
s
14. ( )t t e t 1sin ⋅− ω σ
( ) 22ω σ
ω
++ s
15. ( )t t et
1cos ⋅− ω σ ( )
( ) 22ω σ
σ
+++
s
s
16. ( ) ( )t t Ae t 1cos ⋅+− φ ω σ
ω σ
φ
j s
Aej
−+2
1
+ω σ
φ
j s
Aej
++
−
2
1

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 5/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 5
Przyk ład 2
Znajdź funkcję czasową nastę pują cej funkcji operatorowej
( ) ( ) ( )21
3.3
1
06.0
32
04.003.0
32
04.003.0
)( +++
−
+−−−
−
++−−
+
= s s j s
j
j s
j
sG (2.1)
i wykreśl ją przy użyciu MATLABA.
Rozwią zanie: Funkcja operatorowa (2.1) jest już rozłożona na ułamki proste. W funkcji tej
wystę pują bieguny zespolone i dwa residua w postaci zespolonej oraz biegun dwukrotny.W celu zastosowania wzoru 16 z tabeli 2, residua zespolone należy przekształcić do postaciwyk ładniczej. Postać wyk ładniczą można znaleźć po zastosowaniu nastę pują cych poleceń:
>> M1 = abs( r(1));
M1 =
0.05
>> fi1 = angle( r(1))*180/pi
fi1 =
53.1301
Po znalezieniu postaci wyk ładniczej residuów zespolonych, funkcja operatorowa (2.1) możezostać zapisana w postaci
G( s) =32
05.0 53
j s
e j
−+
o
+32
05.0 53
j s
e j
++
− o
+1
06.0
+− s
+( )2
1
3.3
+ s(2.2)
Funkcja czasowa wyznaczana jest z postaci operatorowej przy użyciu odwrotnej transformaty
Laplace'a
)(t g = £ −1
{ })( sG (2.3)
czyli w tym przypadku
)(t g = £ −1
−++
−+
−
32
10
1
2
1
32
10
1
2
1 5353
j s
e
j s
e j joo
− 0.06 £ −1
+ 1
1
s+ 3.3 £
−1
( )
+ 21
1
s(2.4)
Po zastosowaniu wzorów (16) i (7) oraz (8) z tabeli 2, uzyskuje się nastę pują cą funkcję czasową
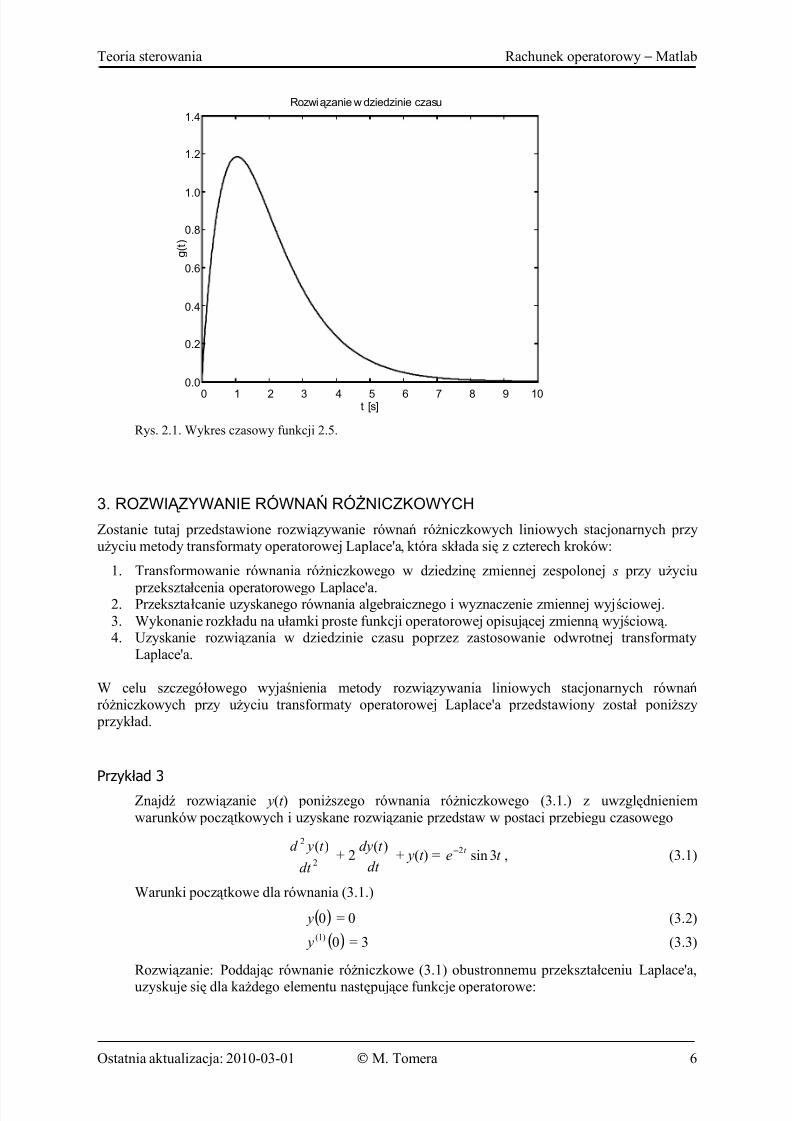
g (t ) = ( )o2 533cos1.0 +−t e
t − t e−06.0 + t te−3.3 dla t ≥ 0 (2.5)
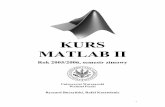
Wykres przebiegu czasowego funkcji (2.4) uzyskany zostanie po napisaniu nastę pują cych liniikodu programu.
t = [0:0.01:10];y = 0.1*exp(-2*t).*cos(3*t+53*pi/180)–0.06*exp(-t)+3.3*t.*exp(-t);
plot( t, y, 'k-')title('Rozwią zanie w dziedzinie czasu')
xlabel('t [s]')ylabel('g(t)')
grid on
Uzyskany wykres funkcji czasowej (2.5) znajduje się na rysunku 2.1.
5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 6/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 6
0 1 2 3 4 5 6 7 8 9 100.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4Rozwią zanie w dziedzinie czasu
t [s]
g ( t )
Rys. 2.1. Wykres czasowy funkcji 2.5.
3. ROZWIĄ ZYWANIE RÓWNAŃ RÓŻNICZKOWYCH
Zostanie tutaj przedstawione rozwią zywanie równań różniczkowych liniowych stacjonarnych przyużyciu metody transformaty operatorowej Laplace'a, która sk łada się z czterech kroków:
1. Transformowanie równania różniczkowego w dziedzinę zmiennej zespolonej s przy użyciu
przekształcenia operatorowego Laplace'a.2. Przekształcanie uzyskanego równania algebraicznego i wyznaczenie zmiennej wyjściowej.
3. Wykonanie rozk ładu na ułamki proste funkcji operatorowej opisują cej zmienną wyjściową .4. Uzyskanie rozwią zania w dziedzinie czasu poprzez zastosowanie odwrotnej transformaty
Laplace'a.
W celu szczegółowego wyjaśnienia metody rozwią zywania liniowych stacjonarnych równań
różniczkowych przy użyciu transformaty operatorowej Laplace'a przedstawiony został poniższy przyk ład.
Przyk ład 3Znajdź rozwią zanie y(t ) poniższego równania różniczkowego (3.1.) z uwzględnieniemwarunków począ tkowych i uzyskane rozwią zanie przedstaw w postaci przebiegu czasowego
2
2)(
dt
t yd + 2
dt
t dy )(+ y(t ) = t e
t 3sin
2− , (3.1)
Warunki począ tkowe dla równania (3.1.)
( )0 y = 0 (3.2)
( )0)1(
y = 3 (3.3)
Rozwią zanie: Poddają c równanie różniczkowe (3.1) obustronnemu przekształceniu Laplace'a,uzyskuje się dla każdego elementu nastę pują ce funkcje operatorowe:
5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 7/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 7
£ { })(t y = )( sY (3.4)
£
dt
t dy )(= )0()( y s sY − (3.5)
£
2
2)(
dt
t yd
= )0()0()()1(2
y sy sY s −− (3.6)
£ { }t e t 3sin
2− =( ) 22
32
3
++ s(3.7)
Po podstawieniu wyrażeń (3.4), (3.5), (3.6) oraz (3.7) do równania (3.1) otrzymuje się
[ ])0()0()()1(2
y sy sY s −− + 2 [ ])0()( y s sY − + )( sY =( ) 22
32
3
++ s(3.8)
Podstawiają c do równania (3.8) podane warunki począ tkowe
3)(2
− sY s + 2 )( s sY + )( sY = ( ) 2232
3
++ s (3.9)
lub
( )122 ++ s s )( sY = 3134
32
+++ s s
(3.10)
Wyznaczają c )( sY z równania (3.8) uzyskuje się
)( sY =( )( )12134
4212322
2
++++
++
s s s s
s s=
( )( )22
2
1134
42123
+++
++
s s s
s s(3.11)
Sprawdzenia poprawności wyznaczenia funkcji operatorowej (3.11) można dokonać korzystają cz twierdzenia o wartości począ tkowej (tabela 1, wzór 7), jednak poprawność tego sprawdzenia
nie gwarantuje, że jest pewność iż uzyskana funkcja operatorowa jest poprawna, ale pozwala nawykrycie bardzo dużych błędów.
)0( y = )(lim0
t yt →
= )(lim s sY s ∞→
=
432
32
13302261
42123
lim
s s s s
s s s
s ++++
++
∞→= 0 (3.12)
Uzyskana wartość jest równa pierwszemu warunkowi począ tkowemu y(0) = 0, jednak obliczenie to nie pozwala stwierdzić czy poprawne są współczynniki funkcji operatorowej(3.11). Cią g dalszy wyznaczania funkcji operatorowej (3.11) znajduje się w przyk ładzie 1, anastę pnie w przyk ładzie 2 i ostatecznie uzyskany wykres czasowy na rysunku 2.1. Kolejne
sprawdzenie uzyskanego wyniku przeprowadza się na wykresie czasowym, wykres musizaczynać się w punkcie określonym przez warunek począ tkowy y(0), natomiast wartość
ustalona można wyznaczyć korzystają c z twierdzenia o wartości końcowej (tabela 1, wzór 8),dla rozpatrywanego w tym przyk ładzie równania różniczkowego uzyskana funkcja czasowa
ustala się na poziomie wyznaczonym w poniższym równaniu (3.13)
)(∞ y = )(lim t yt ∞→
= )(lim0
s sY s→
=1330226
4233lim
234
23
0 ++++
++→ s s s s
s s s
s= 0 (3.13)
Czyli w tym przypadku rozwią zanie y(t ) powinno zaczynać się i ustalać przy wartości zero.
5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 8/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 8
ĆWICZENIA W MATLABIE
M1. Dla poniższych transformowanych
sygnałów, znajdź y(t ) dla t ≥ 0 i wykreślw MATLABIE.
a) )( sY =2+ s
s
b) )( sY =23
122 ++
+ s s
s
c) )( sY =( )
( )( )232
14
+++
s s
s
d) )( sY = s s s 52
1023 ++
e) )( sY =65
632
2
++− −
s s
e s
M2. Korzystają c z oprogramowanianarzędziowego MATLAB, dokonaj rozk ładuna ułamki proste nastę pują cych funkcjioperatorowych
a)( )
( )( )( )( )6543
110)(
+++++
= s s s s
s sG
b)
( )
( )( )64
110
)( 2 +++
= s s s
s
sG
c)( )
( )( )51
25)(
2 +++
= s s s
s sG
d)( )4
22)(
23
34
+++
= s s
s s sG
e)( )
( )35
3100)(
2
2
++++
= s s s
s s sG
f)( )( )222
1)(2 ++++=
s s s s s sG
g)( )( )11
5)(
2
2
+++=
−
s s s
e sG
s
h)( )( )22
5.01
1)(
++=
s s s sG
i)( )
( )( ) se
s s s
s sG −
++
+=
14
2100)(
2
j)( )
( )22 2
12)(
++
+=
s s s
s sG
k) ( )31
1)( += s
sG
l)( )( )22
2
551
12)(
+++
++=
s s s s
s s sG
M3. Znajdź odwrotne transformaty Laplace’adla funkcji operatorowych z zadania M2i narysuj je w MATLABIE.
M.4. Korzystają c z metod transformaty
Laplace’a rozwiąż nastę pują ce równaniaróżniczkowe dla t ≥ 0 z uwzględnieniem
warunków począ tkowych i przedstawuzyskane rozwią zania na wykresieczasowym:
a)3
3)(
dt
t yd + 5
2
2)(
dt
t yd + 4
dt
t dy )(= 2 )(t δ
)0( y = 1
)0()1(
y = −1
)0()2(
y = 1
b) 2
2)(
dt
t yd + 5
dt
t dy )(+ 6 )(t y = 2 t e−
)0( y = 0
)0()1( y = −2
c) dt
t dy )(+ 2 )(t y = 6 t 2cos
)0( y = 2
d)3
3)(
dt
t yd + 4
2
2)(
dt
t yd + 3
dt
t dy )(= 3 )(t δ
)0( y = 1
)0()1(
y = −1
)0()2( y = 1
e)dt
t dy )(+ 2 )(t y = 2
2
1t
)0( y = −1
f)dt
t dy )(+ 3 )(t y = 4 t 4sin
)0( y = 1

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 9/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 9
g)2
2)(
dt
t yd + 4
dt
t dy )(+ 5 )(t y = )(1 t ⋅
)0( y = −3
)0()1(
y = 2
h)2
2 )(
dt
t yd + 3
dt
t dy )(+ 2 )(t y = 3
t e
3−
)0( y = 0
)0()1(
y = 1
i)2
2)(
dt
t yd + 2
dt
t dy )(+ 2 )(t y = 3 t 2sin
)0( y = 2
)0()1( y = −3
j)2
2)(
dt
t yd + 2
dt
t dy )(+ )(t y = 5 t e
3−+ t
)0( y = 2
)0()1( y = 1
k)2
2 )(
dt
t yd +4 )(t y =
2t
)0( y = 1
)0()1(
y = 2
k)2
2)(
dt
t yd + 3
dt
t dy )(+ 6 y(t ) = t e
t 2cos
3−
)0( y = 1
)0()1(
y = 2
ODPOWIEDZI DO WYBRANYCH ĆWICZEŃ
M1.
a) y(t ) = )(t δ − 2t
e2−
b) y(t ) =t e
−− + 3t e
2−
c) y(t ) = −4t e
2−+ 4
t e3−
+8t te
3−
d) y(t ) = o4349.1532cos2361.2)(12 +⋅+⋅ − t et t
e) y(t ) = 3t
e2− −3
t e
3− −[6)2(2 −− t
e − 6( )23 −− t
e ] ( )21 −⋅ t
M2.
a)3
333.3
4
15
5
20
6
333.8)(
+−
++
+−
+=
s s s s sG
b)2
4167.02431.0
4
9375.0
6
6944.0)(
s s s s sG ++
+−
+=
c)2
24.1
1
25.1
5
15.0)(
s s s s sG +−
++
+=
d)3
5.0125.0
2
5.05625.0
2
5.05625.0)(
s s j s
j
j s
j sG +−
++
+−
−=
e) s s s sG100
697.0
94.110
303.4
94.110)( ++−+=
f) s j s j s s
sG25.0
1
25.0
1
25.0
2
25.0)( +
++−
−+−
−=
g) se j s
j
j s
j
s sG 2
866.05.0
4434.15.2
866.05.0
4434.15.2
1
5)(
−
++
+−+
−+−−
++
=
h)( ) s s s j s
j
j s
j sG
4
5.0
6.1
5.0
48.432.024.032.024.0)(
2+
+−
+−
+−
+−+
=
i) se s s j s
j
j s
j
s s j s
j
j s
j sG −
+
+−
+−−
+−
+−++
++
++−
+−
−−=
25
1
20
2
55.2
2
55.20
1
20
2
510
2
510)(
j)( ) ( ) s j s
j
j s
j j s j
j s j sG 5.0
3229.15.0
1890.02143.0
3229.15.0
1890.02143.03229.15.0675.025.0
3229.15.0675.025.0)(
22+
++−−+
−++−+
+++−+
−+−−=

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 10/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 10
k)( ) ( )32
1
1
1
2
1
0)(
+−
++
+=
s s s sG
l)62.3
1
38.1
6.2
1
24.0)(
+−
++
+−
+= s s s s
sG
M3.
a) t t t t eeeet g 3456 333.31520333.8)( −−−− ⋅−⋅+⋅−⋅=
b) t t eet g t t ⋅+⋅+⋅−⋅= −− 4167.0)(12431.09375.06944.0)(46
c) t t eet g t t ⋅+⋅−⋅+⋅= −− 2)(14.125.115.0)(5
d) 225.0)(1125.04.3182cos505.1)( t t t t g ⋅+⋅−+⋅= o
e) )(110094.11094.110)( 697.0303.4 t eet g t t ⋅+⋅−⋅= −−
f) )(125.0cos5.025.0)( 2 t t eet g t t ⋅+⋅−⋅= −−
g) ( ) ( ) ( )225.0 52102866.0cos773.5)( −−−− ⋅++−⋅= t t et et g o
h) )(146.148.41.53cos8.0)(5.05.0 t et et t g t t ⋅+⋅⋅−⋅−+⋅= −−o
i) ( )( )
( )1125205.11612cos1803.11204.1532cos3607.22)(1
−⋅+−+−⋅++−=−−−
t et et t g t t oo
j) )(15.09.1643229.1cos2590.09.1643229.1cos5179.0)( 5.05.0 t t tet et g t t ⋅++⋅+−⋅= −− oo
k) t t et tet g −− ⋅−⋅= 25.02)(
l) t t t eeet t g 62.338.16.22)(14.0)( −−− −+⋅−⋅=
M4.
a) )( sY =( )( )41
242
++++
s s s
s s=
s
5.0−
1
3333.0
+ s+
4
1667.0
+ s
)(t y = )(15.0 t ⋅ − t e−⋅3333.0 + t e 41667.0 −⋅
b) )( sY =
( )( )( )321
2
+++
−
s s s
s=
1
1
+ s
−2
4
+ s
+
3
3
+ s)(t y =
t e−
t e 24
−⋅− +t e 3
3−⋅
c) )( sY =( )( )42
8622
2
++
++
s s
s s=
2
5.0
+ s+
2
75.075.0
j s
j
−−
+2
75.075.0
j s
j
++
=2
5.0
+ s+
2
0607.1o45
j s
e j
−
−+
2
0607.1o45
j s
e j
+
)(t y =t
e2
5.0−⋅ + o452cos1213.2 −⋅ t
d) )( sY =( )( )31
332
++++
s s s
s s=
s
1 −
1
5.0
+ s+
3
5.0
+ s
)(t y = 1(t )t e−⋅− 5.0 +
t e 35.0
−⋅
e) )( sY =
( )2
1
3
3
+
+−
s s
s= −
2
125.1
+ s
+
s
125.0−
2
25.0
s
+3
5.0
s
)(t y =t
e2
125.1−⋅− + )(1125.0 t ⋅ t ⋅− 25.0 +
225.0 t ⋅
f) )( sY =( )( )163
322
2
++
+
s s
s=
3
64.1
+ s+
4
24.032.0
j s
j
−−−
+4
24.032.0
j s
j
++−
=3
64.1
+ s+
4
4.0o1301.143
j s
e j
−
−+
4
4.0o
1301.143
j s
e j
+
)(t y =t
e3
64.1−⋅ + ( o1301.1434cos8.0 −⋅ t

5/6/2018 Rachunek Operatorowy Matlab - slidepdf.com
http://slidepdf.com/reader/full/rachunek-operatorowy-matlab 11/11
Teoria sterowania Rachunek operatorowy − Matlab
Ostatnia aktualizacja: 2010-03-01 M. Tomera 11
g) )( sY =( )54
11032
2
+++−−
s s s
s s=
s
2.0+
j s
j
−++−2
2.26.1+
j s
j
−+−−2
2.26.1=
s
2.0+
j s
e j
−+ 2
7203.2o
0274.126
+
j s
e j
++
−
2
7203.2o
0274.126
)(t y = )(12.0 t ⋅ + o2 0274.126cos4406.5 +⋅ − t e t
h) )( sY =( )( )( )321
6
++++
s s s
s=
1
5.2
+ s−
2
4
+ s+
3
5.1
+ s
)(t y =t e−⋅5.2
t e 24
−⋅− +t e 3
5.1−⋅
i) )( sY =( )( )224
108222
23
+++
+++
s s s
s s s=
2
15.03.0
j s
j
−+−
+2
15.03.0
j s
j
−−−
+ j s
j
−+−1
1.03.1+
j s
j
+++1
3.03.1=
2
3354.0o4349.153
j s
ej
−+
2
3354.0o4349.153
j s
ej
+
−
+ j s
ej
−+
−
1
3038.1o3937.4
+ j s
ej
++1
3038.1o3937.4
)(t y = )o4349.1532cos6708.0 +⋅ t + )o
3937.4cos6077.2 −⋅ − t e t
j) )( sY =( )( )12
215922
234
++
++++
s s s
s s s s=
2
5
+ s+
1
1
+−
s+
( )21
9
+ s+
s
2−+
2
1
s
)(t y =t
e2
5−⋅ −
t e
−+
t te
−⋅9 − )(12 t ⋅ + t
k) )( sY =( )4
2223
34
+
++
s s
s s=
s
125.0−+
2
0
s+
3
5.0
s+
2
5.05625.0
j s
j
−−
+2
5.05625.0
j s
j
++
=
s
125.0−+
3
5.0
s+
2
7526.0o6.41
j s
ej
−
−
+2
7526.0o6.41
j s
ej
+
)(t y = − )(1125.0 t ⋅ +2
25.0 t +o
6.412cos5124.1 −⋅ t
l) )( sY =( )( )63136
1018722
23
++++
−−−−
s s s s
s s s=
23
075.0025.0
j s
j
−++
+23
075.0025.0
j s
j
++−
+9365.15.1
2259.0525.0
j s
j
−+−−
+9365.15.1
2259.0525.0
j s
j
−+−−
=
23
0791.0o6.71
j s
ej
−++
23
0791.0o6.71
j s
ej
++
−
+9365.15.1
5715.0o7.156
j s
ej
−+
−
+9365.15.1
5715.0o7.156
j s
ej
++=
)(t y =o6.712cos1582.0 3 +⋅ −
t e t +
o7.1569365.1cos143.1 5.1 −⋅ − t e
LITERATURA
1. Amborski K., A. Marusak, Teoria sterowania w ćwiczeniach, PWN, Warszawa, 1978.2. Nise N. S. ControlSystems Engineering , 3
rdedn, John Wiley & Sons, 2000.
3. Próchnicki W., M. Dzida, Zbiór zadań z podstaw automatyki, Gdańsk, 1993.4. Tomera M., Rachunek operatorowy Laplace'a, http://www.am.gdynia.pl/~tomera/teoria_ster.htm.