Przegląd Mechaniczny 1/2010
52
1’10 PL ISSN 0033-2259 POD PATRONATEM STOWARZYSZENIA IN˚YNIERÓW I TECHNIKÓW MECHANIKÓW POLSKICH INDEKS 245836 Cena 20 z∏ (w tym 0% VAT)
-
Upload
przeglad-mechaniczny -
Category
Documents
-
view
247 -
download
0
description
Â
Transcript of Przegląd Mechaniczny 1/2010

1’10PL ISSN 0033-2259
POD PATRONATEM STOWARZYSZENIA IN˚YNIERÓW I TECHNIKÓW MECHANIKÓW POLSKICH
INDEKS 245836
Cena 20 z∏ (w tym 0% VAT)


ROK WYD. LXIX � ZESZYT 1/2010 1
Cena 20 z∏
Wydanie publikacji dofinansowane przez Ministerstwo Nauki i Szkolnictwa Wy˝szego
Za treÊç og∏oszeƒ i p∏atnych wk∏adek redakcja nie odpowiada
ROK WYD. LXIX
PRZEGLÑD MECHANICZNYMiesi´cznik naukowo-techniczny
ROK ZA¸O˚ENIA1935
STYCZE¡ 2010 • NR 1/10
Nak∏ad 1000 egz.
Miesi´cznik notowany na liÊcie czasopism punktowanychMinisterstwa Nauki i Szkolnictwa Wy˝szego – 6 pkt.
WYDAWCA:
Instytut Mechanizacji Budownictwai Górnictwa Skalnego
ul. Racjonalizacji 6/802-673 Warszawa
3
17
24
31
39
43
45
47
SPIS TREÂCI str.
ADRES REDAKCJI:IMBiGS – „Przeglàd Mechaniczny”ul. Racjonalizacji 6/8, 02-673 Warszawatel./fax: (0-22) 853 81 13, tel. (0-22) 843 02 01 w. 255e-mail: [email protected]://www.przegladmechaniczny.pl
REDAGUJE ZESPÓ¸:Redaktor naczelny: prof. dr hab. in˝. Jan Szlagowskitel. (0-22) 660-82-85, tel./fax (0-22) 849 99 95Zast´pca red. nacz.: prof. dr hab. in˝. Zbigniew DàbrowskiSekretarz redakcji: mgr Anna MasséRedaktorzy dzia∏ów: prof. nzw. dr hab. in˝. Dariusz Bo-roƒski (Mechanika p´kania), dr in˝. Martyna Jachimowicz(Problemy – NowoÊci – Informacje), prof. dr hab. in˝. An-drzej Kocaƒda (Materia∏y konstrukcyjne), prof. nzw. drhab. in˝. Leszek P∏onecki (Automatyka i robotyka),Maria Popielawska, prof. dr hab. in˝. Jan RyÊ (Podstawykonstrukcji maszyn), prof. dr hab. in˝. Jerzy Wróbel(Komputerowe metody CAD/CAM/CAE), dr in˝. Zbigniew˚ebrowski (Hydraulika i pneumatyka)
RADA PROGRAMOWA:Prof. dr hab. in˝. Stanis∏aw Oziemski – przewodniczàcy(IMBiGS), dr in˝. Tomasz Babul (SIMP), prof. dr hab. in˝.Krzysztof Go∏oÊ (Polit. Warszawska, IMBiGS), prof. dr hab.in˝. Czes∏aw Cempel (Polit. Poznaƒska), prof. dr hab. in˝.Witold Gutkowski (IMBiGS), prof. dr hab. in˝. JanuszKowal (AGH), prof. dr hab. in˝. Eugeniusz Rusiƒski (Polit.Wroc∏awska), dr hab. in˝. Roman Staniek, prof. nzw. (SIMP),prof. dr hab. in˝. Eugeniusz Âwitoƒski (Polit. Âlàska), prof.dr hab. in˝. Wies∏aw Tràmpczyƒski (Polit. Âwi´tokrzyska),prof. dr hab. in˝. W∏adys∏aw W∏osiƒski (PAN)
STALI WSPÓ¸PRACOWNICY:dr hab. in˝. Andrzej Dudczak (IMBiGS), prof. dr hab. in˝.Tadeusz Kacperski (IMBiGS), prof. dr hab. in˝. ArkadiuszM´˝yk (Polit. Âlàska), dr hab. in˝. Tadeusz Smolnicki (Polit.Wroc∏awska)
KIEROWNIK ZAK¸ADU WYDAWNICTW I PROMOCJI:Ryszard Kwiecieƒ – tel. kom. (0) 602 390 703e-mail: [email protected]
WARUNKI PRENUMERATYPrzyj´cie prenumeraty – wy∏àcznie na podstawie do-konanej wp∏aty na blankietach ogólnie dost´pnychw bankach i w UPT (tzw. polecenie przelewu lub przekazdla wp∏at na rachunki bankowe) na odpowiedzialnoÊçzamawiajàcego. Nieprawid∏owo wype∏nione blankietywp∏at (niezgodnie z podanymi ni˝ej wskazówkami) nieb´dà przyj´te.Na blankiecie wp∏at nale˝y podaç nast´pujàce dane:dok∏adnà nazw´ i adres (z kodem pocztowym) zama-wiajàcego, nazw´ czasopisma, liczb´ egzemplarzy i okresprenumeraty.Wp∏aty – zgodnie z podanymi cenami nale˝y dokonaçw banku lub UPT na konto IMBiGS – BPH S.A.O/Warszawa nr 97 1060 0076 0000 3210 0014 6850.Prenumerata ze zleceniem wysy∏ki za granic´ – osobyprawne i fizyczne. Nale˝y podaç dok∏adny adres odbiorcyza granicà. Cena prenumeraty jest dwukrotnie wy˝sza odceny normalnej. Zmiany w prenumeracie, np. zmian´liczby tytu∏ów, liczby egzemplarzy, rezygnacj´ z prenu-meraty itp. mo˝na zg∏aszaç pisemnie, z mocà obowià-zujàcà od nast´pnego kwarta∏u.Cena prenumeraty na 2010 r:kwartalnie – 60 z∏pó∏rocznie – 120 z∏rocznie – 240 z∏Informacji o prenumeracie udziela redakcja, gdzie równie˝mo˝na nabywaç egzemplarze archiwalne po uprzednimwp∏aceniu nale˝noÊci na konto lub w kasie w redakcji.
Dtp: „AWiWA” - tel. (0-22) 780 45 98Druk: Oficyna Poligraficzna APLA Sp. j.ul. Sandomierska 89, 25-325 Kielce
PROBLEMY – NOWOÂCI – INFORMACJE
ARTYKU¸Y G¸ÓWNE
Badania porównawcze uk∏adu regulacji mikro-procesorowej dla uk∏adów nap´dzanych sil-nikami hydraulicznymi ma∏ych pr´dkoÊciobrotowych – Andrzej Skrocki, Jan Szlagowski
Systemy transferu technologii w Polsce, Irlandii,Finlandii i Niemczech – Aneta Masternak-Janus,Andrzej Kocaƒda
Badania symulacyjne i szybkie prototypowanieruchu robota czterono˝nego o strukturze ssaka– Maciej T. Trojnacki
Pojazdy ekologiczne – przysz∏oÊç samochodówhybrydowych – Antoni Szumanowski
Mobile robot with hydrostatic drive controlledby PLUS+1 module – Artur Guzowski, AndrzejSobczyk
METODY I URZÑDZENIA POMIAROWE
Urzàdzenie do badania topografii powierzchnipróbek wielkowymiarowych
Z CZASOPISM ZAGRANICZNYCH
Dziesi´ç zasad efektywnego i zrównowa˝onegoprojektowania – t∏umaczenie i opracowanieMartyna Jachimowicz

ROK WYD. LXIX � ZESZYT 1/20102
Przeglàd Mechaniczny No 1/2010PL ISSN 0033-2259
Htathfns ukfdys[ cnfnmtq
Przeglàd Mechaniczny No. 1/2010PL ISSN 0033-2259
Summaries of main article
Guzowski A., Sobczyk A.: Mobile robot with hydrostatic drive con-trolled by PLUS+1 module. Przeglàd Mechaniczny No. 1/2010,cnh. 43-45> hbc. 5.D cnfnmt ghtlcnfdktyf rjywtgwbz vj,bkmyjuj hj,jnf clbcnfywbjyysv eghfdktybtv. Jcyjdyjq wtkm/ hf,jns ,skfhfphf,jnrf ghbdjlyjq cbcntvs b gktxf hj,jnf c lbc-nfywbjyysv eghfdktybtv !eghfdktybt gjpbwbtq> crjhjcnm/b cbkjq@. Dct ˝ktvtyns hj,jnf ghbdjlzncz d ldb;tybtghb gjvjob kbytqys[ gytdvjldbufntkmtq dscjrjujlfdktybz. ¸nj hfphtiftn ghbvtyznm vtymibt rjvgjytyns>xtv ˝ktrnhbxtcrbt> d ˝njv ;t lbfgfpjyt vjoyjcnb.Cbcntvf eghfdktybz PLUS+1 abhvs Sauer-Danfossbcgjkmpetncz lkz eghfdktybz ˝ktrnhjublhfdkbxtcrbvb˝ktvtynfvb cbcntvs. ¸nf cbcntvf jcyjdfyf yf nt[yjkjubbCANBus b ghbujlyf lkz eghfdktybz vj,bkmysvb> f nfr;tfdnjyjvysvb hj,jnfvb. Ghtlcnfdktyfz cbcntvf eghfdktybzhfphtiftn ghjdjlbnm ntcns b ghbvtyznm hfpkbxystfkujhbnvs eghfdktybz. Ghtlcnfdktyf nt[ybxtcrfz ljre-vtynfwbz> c[tvf ublhfdkbxtcrjq b ˝ktrnhbxtcrjq cbcntvseghfdktybz.
Masternak-Janus A., Kocaƒda A.: Cbcntvs nhfycathf nt[-yjkjubb d Gjkmit> Bhkfylbb> Abykfylbb b Uthvfybb.Przeglàd Mechaniczny No. 1/2010, cnh. 24-31> hbc. 4.Cbcntvf nhfycathf nt[yjkjubb !NN@ hfphtiftn ˝aatrnbdyjtghjntrfybt ghjwtccf nt[yjkjubb. Jyf cjcnjbn bp nht[ehjdytq% ehjdtym herjdjlbntktq> ehjdtym dcgjvfufybznhfycathf nt[yjkjubb> ehjdtym bcgjkybntktq bccktljdfybqb byyjdfwbq. Chtlb cnhfy EC zdkz/ncz bynthtcysvbcbcntvs NN> bvt/obtcz d Bhkfylbb> Abykfylbb b Uth-vfybb. Jyb ˝aatrnbdyj dcgjvfuf/n vt[fybpvs NN> ,kf-ujlfhz xtve dkbz/n yf gjdsitybt byyjdfwbjyyjcnb brjyrehtynyjcnb. D gjkmcrjq cbcntvt nhfycathf nt[yjkjubbe;t lfdyj ghjdjlzncz bpvtytybz> wtkm/ rjnjhs[ zdkztnczghbcgjcj,ktybt r gjnht,yjcnb ghjvsiktyyjcnb> jcyjdfyyjqyf pyfybz[.
Skrocki A., Szlagowski J.: Chfdybntkmyst bccktljdfybz cbc-ntvs vbrhjghjwtccjhyjuj htuekbhjdfybz lkz cbcntv>ghbdjlbvs[ d ldb;tybt ublhfdkbxtcrbvb ldbufntkzvbvfks[ crjhjcntq. Przeglàd Mechaniczny No. 1/2010, cnh.17-24> hbc. 13> nf,. 1.Ghtlcnfdktys chfdybntkmyst bccktljdfybz cbcntvshtuekbhjdfybz crjhjcnb b gjpbwbjybhjdfybz vfybgekznjhf>ghbdjlbvjuj d ldb;tybt gjhiytdsv hflbfkmysv ublhf-dkbxtcrbv ldbufntktv nbgf MR160 b jh,bnfkmysvldbufntktv GMSW320 d j,kfcnb vfks[ crjhjcntqdhfotybz. Bcgjkmpjdfyyst vtlktyyjdhfof/obtcz ldbufntkb%gjhiytdjq hflbfkmysq b jh,bnfkmysq cjukfcyj lfyysvbp rfnfkjuf bvt/n vbybvfkmye/ crjhjcnm dhfotybz>cjjndtncndtyyj 1 j,#vby b 10 j,#vby> f vfrcbvfkmystcrjhjcnb cjjndtncndtyyj 900 j,#vby b 240 j,#vby> xnjlftn rhfnyjcnm crjhjcnb yf ehjdyt 900 b 24. D bcckt-letvjq cbcntvt ghbyznf vbybvfkmyfz crjhjcnm dhfotybzvfybgekznjhf jr. 0>02 – 0>03 j,#vby> ghb nht,etvjv lzgf-pjyt crjhjcnb dhfotybz jrjkj 1500. Xnj,s htfkbpjdfnmaeyrwbjyfkmyst nht,jdfybz> ghtl(zdkztvst cjdhtvtyysvgjdjhjnysv vt[fybpvfv> ,skj htityj ghbvtybnm vbrhj-ghjwtccjhyjt eghfdktybt ˝nb[ ldbufntktq> hf,jnf/ob[d cbcntvt fdnjvfnbxtcjuj htuekbhjdfybz. Ghbvtytyysqvtnjl hfphtibk pyfxbntkmyj cybpbnm cnf,bkmye/ crjhjcnmdhfotybz bccktletvs[ ldbufntktq> hfcibhzz ˝nbv j,kfcnmb[ ghbvtytybz.
Trojnacki M. T.: Cbvekzwbjyyst bccktljdfybz b ,scnhjtghtlcnfdktybt ldb;tybz xtneht[yj;yjuj hj,jnf cjcnhernehjq dcfcsdf/otq ujkjdrb. Przeglàd MechanicznyNo. 1/2010, cnh. 31-39> hbc. 16.D hf,jnt ghtlcnfdktys htpekmnfns cbvekzwbjyys[ bcckt-ljdfybq ldb;tybz hj,jnf d gfrtnt Matlab/Simulink b j,-ce;lty cgjcj, htfkbpfwbb vekmnbgkbrfwbb ˝njuj ldb;tybzc ghbvtytybtv ghbyflkt;yjcntq Virtual Reality. Jgbcfyfecnfyjdrf ˝rcgthbvtynfkmys[ bccktljdfybq b gjvtotyshtpekmnfns ,scnhjuj ghtlcnfdktybz ldb;tybz hj,jnf cbcgjkmpjdfybtv ghbyflkt;yjcntq Real Time Windows Targetgfrtnf Matlab b rjynhjkmyj-bpvthbntkmyjq rfhns AdvantechPCI 1710. Ghjdtltyyst ˝rcgthbvtynfkmyst bccktljdfybzjwtybkb ghfdbkmyjcnm ghtlkj;tyys[ vtnjljd cbyntpfldb;tybz hj,jnf.
Guzowski A., Sobczyk A.: Mobile robot with hydrostaticdrive controlled by PLUS+1 module. Przeglàd Me-chaniczny No. 1/2010, p. 43-45, figs 5.This paper presents a concept of remote controlledmobile robot. The main goal of presented activity wasa remote control of drive system and robot’s arm (posi-tion, velocity and force control). All mechanisms of therobot are driven with high pressure hydraulic linearor/and rotational actuators. It will allow using smallerthan electric components for the same power range.Sauer-Danfoss PLUS+1 system was applied to controlof electro-hydraulic components system. This systemsbased on CANBus technology is suitable for creationcontrol system of mobile, and in the next step, autono-mous machine. Such control system enables to carry, testand apply various control algorithms. At the beginning,technical documentation, hydraulic system scheme andelectric control scheme were been elaborated.
Masternak-Janus A., Kocaƒda A.: Technology transfersystems in Poland, Ireland, Finland and Germany.Przeglàd Mechaniczny No. 1/2010, p. 24-31, figs 4.Technology transfer (TT) system allows effective tech-nology transfer and consists of three levels: decision-makers level, support level and executives level. Amongthe EU countries interesting are TT systems existing inIreland, Finland and Germany. These systems effectivesupport TT mechanisms, influence on innovations andcompetitiveness. In Polish TT system have been adjustedfor requirements of knowledge-based economy.
Skrocki A., Szlagowski J.: Comparative research ofmicroprocessor control system for systems driven byhydraulic engines with small speeds. Przeglàd Mecha-niczny No. 1/2010, p. 17-24, figs 13, tab. 1.There were presented comparative research of speedcontrol system and positioning of manipulator driven byhydraulic radial piston engine MR160 type and by orbitalengine GMSW320 in range of small rotational speeds.Applied low-speed engines: radial piston and orbital,according to catalogue data have minimal rotationalspeed: 1 rpm/min and 10 rpm/min, and maximum speed:900 rpm/min and 240 rpm/min (multiplication factor was900 and 24). In the case of investigated system assumedminimal rotational speed of manipulator was about02 – 0,03 rpm/min, when required range of rotationalspeed was 1500. In the order to realize functional require-ments of modern rotational mechanism, it was decided toapply microprocessor control of engines working inautomatic control system mode. This method allowed todecrease of stable minimal rotational speed of investi-gated engines and expand range of their applications.
Trojnacki M. T.: Simulation experiments and rapidprototyping of four-legged robot with mammal struc-ture. Przeglàd Mechaniczny No. 1/2010, p. 31-39, figs 16.Results of simulations of robot’s motion in Matlab/Simulink were presented, as well as method of animationof the movement using Virtual Reality. Experimentenvironment was described and results of rapidprototyping of robot’s motion with the use of Real TimeWindows Target in Matlab and Advantech PCI 1700multifunction card were presented. Obtained resultsverified correctness of proposed methods of robot’smotion synthesis.

ROK WYD. LXIX � ZESZYT 1/2010 3
problemy • nowoÊci • informacje
W bie˝àcym roku b´dziemyobchodziç jubileusz 75-lecia„Przeglàdu Mechanicznego”. Cza-sopismo po raz pierwszy uka-za∏o si´ 10 stycznia 1935 roku.Pierwszy zeszyt „PM” zawiera∏artyku∏y dotyczàce: badaƒ ma-teria∏owych, badaƒ nad silnikiemDiesla, spawania, metrologii.
Nasuwa si´ tutaj refleksja.Âwiat dokona∏ rewolucji nau-
kowej, technicznej i informatycz-nej, ale problemy wtedy istotnei nierozwiàzane sà równie˝ dzisiajdalej analizowane.
Od stycznia 2001 r. wydawcà„PM” jest Instytut Mechaniza-cji Budownictwa i GórnictwaSkalnego.
IMBiGS wraz z Radà Prog-ramowà i Redakcjà „PM” posta-nowi∏ godnie uczciç jubileuszjednego z najstarszych czasopismz dziedziny budowy maszyn,organizujàc Sesj´ Jubileuszowà.
W zeszytach wydawanychw 2010 roku oraz podczas plano-wanej na 12.02.2010 r. SesjiJubileuszowej pragniemy poka-zaç drog´, jakà przeby∏ „Prze-glàd Mechaniczny” oraz jegoCzytelnicy i Autorzy.
Poka˝emy tak˝e drog´, jakàprzeby∏a in˝ynieria mechaniczna(szczegó∏owe informacje nastronie internetowej).
Zeszyty wydawane w 2010 r.b´dà zawiera∏y artyku∏y dotyczàcenast´pujàcych zagadnieƒ:
� Rozwój metod obliczenio-wych
� Rozwój materia∏ów konstruk-cyjnych
� Rozwój nap´dów pojazdów� Rozwój nap´dów hydraulicz-
nych
� Rozwój technologii budowymaszyn
� Rozwój uk∏adów sterowaniamaszyn
Patronat honorowy nad obcho-dami jubileuszu „Przeglàdu Me-chanicznego”obj´li:
� Waldemar Pawlak – Wice-premier, Minister Gospodarki
� Prof. dr hab. Barbara Kud-rycka – Minister Nauki i Szkol-nictwa Wy˝szego
W Komitecie Honorowym Ju-bileuszu znalaz∏y si´ nast´pujàceosoby:
1. Stefan Góralczyk – DyrektorIMBiGS, Przewodniczàcy,
2. Ewa Maƒkiewicz-Cudny –Prezes FSN NOT,
3. Andrzej Ciszewski – PrezesSIMP,
4. Roman Baczyƒski – PrezesZarzàdu Metalexport-S,
5. W∏odzimierz Bramowicz –Dyrektor Bosch Rexroth Sp. z o.o.,
6. Leszek Buczyƒski – by∏y re-daktor naczelny „PM”,
7. Eugeniusz Budny – by∏y dy-rektor IMBiGS,
8. Ryszard Kardasz – PrezesZarzàdu Przemys∏owego CentrumOptyki S.A.,
9. Henryka Kopacz – by∏a re-daktor naczelna „PM”,
10. Edward Edmund Nowak –Prezes Zarzàdu BUMAR,
11. Enrico Pavoni – Prezes FiatAuto Poland,
12. Krzysztof Trofiniak – PrezesZarzàdu Huty Stalowa Wola S.A.
Komitet Naukowy Jubileuszu„Przeglàdu Mechanicznego” two-rzà Profesorowie:
W∏adys∏aw W∏osiƒski – Prze-wodniczàcy, Czes∏aw Cempel,
Krzysztof Go∏oÊ, Witold Gut-kowski, Tadeusz Kacperski, Ja-nusz Kowal, Stanis∏aw Oziemski,Eugeniusz Rusiƒski, Jan Szla-gowski, Eugeniusz Âwitoƒski,Wies∏aw Tràmpczyƒski.
Przez wiele lat „Przeglàd Me-chaniczny” by∏ organem g∏ów-nym Stowarzyszenia In˝ynierówMechaników Polskich SIMP(obecnie wydawany jest podpatronatem tego Stowarzyszenia).Informowa∏ o pracach SIMP i lu-dziach go tworzàcych. Od po-czàtku swojego istnienia towa-rzyszy∏ rzetelnie polskiemu prze-mys∏owi. Równie˝ w trudnychlatach transformacji ustrojowejw Polsce „PM” musia∏ znaleêçswoje miejsce na rynku prasyfachowej. Sta∏ si´ znaczàcymmiesi´cznikiem naukowo-tech-nicznym, wa˝nym dla Êrodowiskanaukowego Polski oraz jej kadryin˝ynierskiej.
Instytut Mechanizacji Budow-nictwa i Górnictwa Skalnegobardzo wysoko ceni sobie faktwydawania „PM”. Wysoka pozy-cja naukowa i poznawcza czaso-pisma sprawia, ˝e jest on wizy-tówkà IMBiGS i dumà poÊródinnych publikacji.
Tegoroczny jubileusz „PM” jestbardzo wa˝ny równie˝ ze wzgl´-du na fakt, ˝e w 2011 r. Instytuttak˝e obchodziç b´dzie jubileusz60-lecia swojego istnienia, a wi´czarówno wydawca, jak i wydaw-nictwo majà za sobà d∏ugà tra-dycj´.
Przekazujàc szczere gratulacjeca∏emu zespo∏owi redakcyjnemu,˝ycz´ wszystkim zaanga˝owa-nym w przygotowanie kolejnychnumerów zdrowia i wielu chwilsatysfakcji z dobrze wykonanejpracy, a Instytutowi dalszej takznaczàcej wspó∏pracy dla rozwojunauki i wzrostu znaczenia Êro-dowiska in˝ynierskiego.
Dyrektor IMBiGSdr Stefan Góralczyk
Jubileusz „Przeglàdu Mechanicznego”
Od Wydawcy

ROK WYD. LXIX � ZESZYT 1/20104
problemy • nowoÊci • informacje
10 stycznia 1935 r. ukaza∏ si´pierwszy numer „Przeglàdu Mecha-nicznego”. Stowarzyszenie In˝ynie-rów Mechaników Polskich podj´∏odecyzj´ o przekszta∏ceniu wydaw-nictwa „Mechanik” (wydawanego od1 stycznia 1909 r.) w dwutygodnik„Przeglàd Mechaniczny” obejmujàcywszystkie dzia∏y zwiàzane z budowài eksploatacjà maszyn, w tym za-gadnienia zwiàzane z nowoczesnymiw tamtych czasach konstrukcjamisamochodów i samolotów. Genezàjego powstania by∏a potrzeba in-tegracji Êrodowiska in˝ynierskiegozajmujàcego si´ budowà maszyn.
W „S∏owie wst´pnym” zamiesz-czonym w pierwszym zeszycie czaso-pisma przedstawiono jego zakrestematyczny oraz okreÊlono cel utwo-rzenia pisma dla in˝ynierów me-chaników.
„Przeglàd Mechaniczny” mia∏publikowaç: „...
1. rozprawy i referaty z nast´pu-jàcych obejmowanych przez to pismodzia∏ów: a) energetycznego, b) kon-strukcyjnego, c) obróbki metali,d) metaloznawczego; z uwzgl´dnie-niem równie˝ takich wyodr´bnia-jàcych si´ dziedzin, jak automobi-lizm i lotnictwo, odlewnictwo, spa-walnictwo, komunikacja, zarzàdzaniezak∏adami wytwórczemi itd.;
2. sprawozdania ze zjazdów mi´-dzynarodowych i krajowych oraz po-kazów, wystaw, konkursów itd.;
3. sprawozdania z prasy technicz-nej polskiej i zagranicznej;
4. wiadomoÊci z dziedziny zagad-nieƒ przemys∏owo-gospodarczychi spo∏ecznych;
5. bibliografie wydawnictw tech-nicznych polskich i cudzoziemskich;
6. kronik´ dzia∏alnoÊci SIMP;7. zagadnienia spo∏eczno-tech-
niczne.W przekonaniu o potrzebie takiego
czasopisma oraz o donios∏oÊci roli,jakà b´dzie ono mia∏o do spe∏nienia,przyst´pujemy do jego wydawania,wypisujàc na jego sztandarze s∏owadewizy SIMP: s∏u˝b´ krajowi przezwyt´˝onà prac´ na polu technikii wytwórczoÊci, majàcà na celu wy-zyskanie bogactw przyrody ku za-pewnieniu najwi´kszego rozwojugospodarczego i bezpieczeƒstwaRzplitej.
Wierzymy, i˝ „Przeglàd Mechanicz-ny” spotka si´ wÊród in˝ynierów me-chaników nie tylko z zainteresowa-niem, lecz i poparciem, zarówno przezrozpowszechnianie pisma, jak i przezczynnà w niem wspó∏prac´. O takiewspó∏dzia∏anie z nami goràco pro-simy”.
Pierwszym redaktorem odpowie-dzialnym zosta∏ in˝. Czes∏aw Mikul-ski, a w Zarzàdzie Czasopisma i Komi-tecie Redakcyjnym by∏o wielu zna-komitych in˝ynierów, w tym wieluprofesorów (por. nr 1/1935 do∏àczo-ny w wersji elektronicznej).
Przy lekturze pierwszych numerów„Przeglàdu Mechanicznego” nasuwasi´ spostrze˝enie, ˝e problemy wte-dy istotne i wa˝ne nadal sà aktualne.Dotyczy to przyk∏adowo takich za-gadnieƒ, jak: energetyczne, paliwo-we, konstrukcyjne, materia∏owe, diag-nostyka maszyn i urzàdzeƒ.
Ostatni numer 8 z 1939 r. nie zapo-wiada∏ zawieruchy II wojny Êwiato-wej i tego, ˝e przez najbli˝sze kilkalat czasopismo nie b´dzie wydawa-ne. Dopiero w styczniu 1947 r. wzno-wiono wydawanie „PM”, uzasadnia-jàc to nast´pujàco:
„Po siedmioletniej przerwie, wy-wo∏anej wypadkami wojennymi,wznawiamy wydawnictwo czaso-pisma „Przeglàd Mechaniczny” o po-ziomie i zakresie zbli˝onym do przed-wojennego, ograniczajàc si´ jeno doram miesi´cznika. Potrzeba takiegowydawnictwa wystàpi∏a wyraêniew okresie, kiedyÊmy je stracili, kie-dy jego ∏amy zosta∏y zamkni´tew zwiàzku z rozp´taniem wojny naziemiach polskich.
Centralny Zarzàd Przemys∏u Me-talowego skupiajàcy dziÊ prawieca∏oÊç problemów przemys∏u me-talowego podjà∏ inicjatyw´ w tejsprawie i upowa˝ni∏ dotychcza-sowego redaktora tego wydaw-nictwa do wznowienia pisma jakoorganu Centralnego Zarzàdu Prze-mys∏u Metalowego. Czasopismopozostaje równie˝ organem Sto-warzyszenia In˝ynierów i Techni-ków Mechaników Polskich „SIMP”b´dàcego dalszym ciàgiem zreorga-nizowanego Stowarzyszenia In˝y-nierów Mechaników Polskich „SIMP”– za∏o˝yciela czasopisma…
„Przeglàd Mechaniczny” pojawiasi´ po ukazaniu si´ i zdobyciu ju˝pewnych tradycji powojennychbratniego pisma „Mechanik”.
Jaki chcemy mieç poziom i kie-runek czasopisma „Przeglàd Me-chaniczny”?
Zgodnie z uchwa∏ami KomitetuRedakcyjnego czasopisma „Mecha-nik” podanymi w Nr 7 i 8 tego cza-sopisma, artyku∏y zamieszczanew „Mechaniku” powinny byç dos-t´pne dla wykwalifikowanych rze-mieÊlników, którzy przez pog∏´-bianie swych wiadomoÊci dà˝à dozaj´cia stanowisk przodowników,instruktorów i mistrzów technicz-nych. „Przeglàd Mechaniczny” b´-dzie mia∏ poziom wy˝szy, in˝ynier-ski, dost´pny równie˝ dla technika,który przez prac´ nad sobà i roz-szerzenie horyzontów technicznychdà˝y do zaj´cia stanowisk in˝y-nierskich.
75 lat „Przeglàdu Mechanicznego”

ROK WYD. LXIX � ZESZYT 1/2010 5
problemy • nowoÊci • informacjeZakres dzia∏alnoÊci „Przeglàdu
Mechanicznego” obejmuje w praw-dzie wszystkie dziedziny, na którychopiera si´ dzia∏alnoÊç przemys∏u me-talowego, ze szczególnym uwzgl´d-nieniem nast´pujàcych tematów:
a) zagadnienia gospodarcze z dzie-dziny przemys∏u metalowego,
b) zagadnienia odzwierciadlajàcepost´p techniczny w przemyÊle me-talowym w kraju i zagranicà,
c) artyku∏y o charakterze nauko-wym, lecz zwiàzane z post´pemtechniki,
d) metaloznawstwo,e) odlewnictwo,f) konstrukcje maszyn i urzàdzeƒ
mechanicznych,g) zagadnienia energetyczne,h) organizacja pracy i przedsi´-
biorstw metalowych…”.W tym pierwszym powojennym
numerze ze stycznia 1947 r. artyku-∏y publikowali znakomici autorzy,z których wymieni´ tylko prof. Maksy-miliana Tytusa Hubera, który omawia∏hipotezy wytrzyma∏oÊciowe (PM nr1/1947, s. 2). Od tego momentu „PM”jest wydawany nieprzerwanie a˝ dodziÊ, a jego skromna szata graficznaulega zmianom.
Przez wiele lat „PM” by∏ organemSIMP. Informowa∏ o pracach SIMPi ludziach go tworzàcych. Od poczàt-ku swojego istnienia w latach przed-wojennych i powojennych, niezale˝-nie od prze∏omowych dat w historiikraju, „PM” pokazywa∏ rozwój pol-skiego i Êwiatowego przemys∏ui polskiej nauki. Pilnie obserwowa∏i rejestrowa∏ zmiany zachodzàcew mechanice oraz budowie i eks-ploatacji maszyn. W kolejnych rocz-
nikach „PM” jak w soczewce widaçrozwój techniki i nauki, który dokona∏si´ w czasie jego istnienia na rynkuwydawniczym. Z lektury archiwalnychroczników wynika prawda oczywista:Êwiat dokona∏ rewolucji naukowej,technicznej i informatycznej, ale nadalborykamy si´ z nierozwiàzanymi dokoƒca problemami korozji, zm´cze-nia, kszta∏towania, recyklingu itp.
Mnie przypad∏o prowadzenie „PM”w ostatnich 10 latach. By∏y to trud-ne lata transformacji ustrojowejw Polsce. W tym okresie pismomusia∏o znaleêç swoje miejsce narynku prasy naukowo-technicznej.StaliÊmy si´ liczàcym miesi´cznikiemnaukowo-technicznym, istotnym dlaÊrodowiska naukowego Polski.
Prze∏omowà datà w historii „PM”by∏ rok 2001. Jego wydawcà zosta∏Instytut Mechanizacji Budownictwai Górnictwa Skalnego. Decyzji pod-j´tej przez ówczesnego dyrektoraprof. dr. hab. in˝. Eugeniusza Bud-nego czasopismo zawdzi´cza swojedalsze istnienie. Nadal pozostajeorganem SIMP, a od 2007 r. wyda-wane jest pod patronatem tego Sto-warzyszenia.
Przez te wszystkie lata publikowaliw „Przeglàdzie Mechanicznym” zna-komici autorzy: naukowcy i in˝ynie-rowie. Nie starczy∏oby miejsca i czasuna wymienienie ich wszystkich. Przy-bli˝my tutaj sylwetki kilku z nich,którzy zapisali si´ w historii rozwojuÊwiatowej i polskiej in˝ynierii me-chanicznej:
– prof. Jan Czochralski (Nowo-czesne kolejowe metale ∏o˝yskowe– PM nr 12/1936), znany metalurg,chemik i metaloznawca. Twórca me-tody pomiaru szybkoÊci krystalizacjimetali do otrzymywania monokrysz-ta∏ów pó∏przewodników, zwanej me-todà Czochralskiego,
– prof. Maksymilian Tytus Huber(Teorie wytrzyma∏oÊciowe – PM nr1/1947), znakomity mechanik, twórcahipotezy odkszta∏cenia postaciowe-go majàcej istotny wp∏yw na rozwójteorii plastycznoÊci,
– prof. Mieczys∏aw Wolfke (Za-gadnienia naukowe lotów stratosfe-rycznych – PM nr 7/8/1938), polskifizyk – twórca podstaw telewizji i ho-lografii, uczeƒ Alberta Einsteina orazodkrywca dwóch odmian ciek∏egohelu,
– prof. Wac∏aw Moszyƒski (Wsprawie normalizacji tolerancji wy-miarowych pó∏wyrobów hutniczych– PM nr 10/1937), znakomity spec-jalista w zakresie podstaw budowy
maszyn. Autor doskona∏ych podr´cz-ników akademickich,
– prof. Bohdan Stefanowski (Mo˝-liwoÊci rozwojowe turbin parowychna tle post´pów w roku 1935 – PMnr 1/1936), znakomity termodynamik,twórca Instytutu Techniki CieplnejPolitechniki Warszawskiej,
– prof. Gustaw Andrzej Mokrzycki(Samoloty w 14 Salonie Lotniczymw Pary˝u – 16.XI-2.XII.1934 – PMnr 5/1935), znakomity uczony pracu-jàcy w Polsce, Kanadzie i USA. Autorlicznych prac i patentów z dziedzinyaerodynamiki, nawigacji i automatykilotniczej. Twórca samolotu PZL 22,
– prof. Aleksander Krupkowski(Prace VII-go Kongresu Mi´dzynaro-dowego Górnictwa, Metalurgii i Geo-logii Stosowanej – 1936) metalurg.Opracowa∏ termodynamicznà teori´procesów utleniania oraz redukcjitlenków metali, jak równie˝ rafinacjimetali technicznych,
– prof. Boles∏aw To∏∏oczko (Budo-wa kot∏ów parowych w roku 1935 –PM 1/1936), maszynoznawca i ener-getyk. Specjalizowa∏ si´ w budo-wie maszyn cieplnych i energetycecieplnej,
– prof. Stanis∏aw Kocaƒda (Bada-nia mikrobudowy prze∏omów zm´-czeniowych w latach 1954-2004 –PM nr 1/2004), wybitny uczony w za-kresie zm´czeniowego p´kania metalii konstrukcji. Twórca polskiej szko∏ybadaƒ zm´czeniowych,
– prof. Karol Taylor (Wspó∏czes-ne samochody osobowe – PM nr1/1936), konstruktor silników spa-linowych. Projektowa∏ konstrukcjepierwszego polskiego ciàgnika rolni-czego z Ursusa,

ROK WYD. LXIX � ZESZYT 1/20106
problemy • nowoÊci • informacje
– prof. Ignacy Brach (cz∏onek RadyProgramowej inaugurujàcej wyda-wanie pisma po II wojnie Êwiatowej),wybitny in˝ynier, twórca HipotezyWielokrotnego Kruszenia Ska∏, wspó∏-autor razem z in˝ynierem RyszardemWalczewskim unikalnego rozwiàzaniaprzesuwnego osprz´tu do koparekjednonaczyniowych,
– prof. Zbigniew Osiƒski (Poszu-kiwanie prawdy w mechanice – PMnr 16/1996), twórca teorii konstrukcjii zasad konstrukcji.
W ciàgu 75 lat istnienia czasopis-ma „Przeglàdem Mechanicznym” kie-rowali nast´pujàcy redaktorzy na-czelni:
1. 1935 r. – 1939 r. – redaktor od-powiedzialny – in˝. Czes∏aw Mikulski
2. 1947 r. – 1949 r. – prof. in˝. Ed-mund Oska
3. 1950 r. – in˝. mechanik AdamTadeusz Troskolaƒski
4. 1951 r. – 1960 r. – prof. mgr in˝.Marian Wakalski
5. 1961 r. – 1977 r. – in˝. mechanikW∏adys∏aw Kaw´cki
6. 1978 r. – 1990 r. – mgr in˝. Le-szek Buczyƒski
7. 1991 r. – 1992 r. – mgr in˝. JacekKostmanowicz
8. 1993 r. – 1994 r. – mgr in˝. Hen-ryka Kopacz
9. 1995 r. – 1999 r. – prof. dr hab.in˝. Wies∏aw Tràmpczyƒski
10. 2000 r. – i obecnie – prof. drhab. in˝. Jan Szlagowski
Radà Programowà „Przeglàdu Me-chanicznego” kierowali:
1. 1935 r. – prof. dr Bogdan Ste-fanowski (Przewodniczàcy KomitetuRedakcyjnego)
2. 1960 – 1990 – prof. dr hab. in˝.Zdzis∏aw Paw∏owski
3. 1995 – 2001 – prof. dr hab. in˝.Zbigniew Osiƒski
4. 2002 – 2005 – prof. dr hab. in˝.Maciej Zarzycki
6. 2005 – 2008 – prof. dr hab. in˝.Dionizy Dudek
7. 2008 r. i aktualnie – prof. dr hab.in˝. Stanis∏aw Oziemski
Przez lata istnienia „Przeglàdu Me-chanicznego” wspó∏pracowa∏o z nimwielu redaktorów dzia∏owych, redak-torów merytorycznych, redaktorówtechnicznych, grafików, pracownikówadministracyjnych, korektorów. Wielez tych osób zwiàza∏o si´ z redakcjàna d∏ugie lata. WÊród wieloletnichredaktorów dzia∏ów nale˝y wymie-niç: prof. Eugeniusza Budnego, prof.Tadeusza Burakowskiego, prof. Zbig-niewa Dàbrowskiego, dr. in˝. Krzysz-tofa Chodnikiewicza, dr. Jerzego Ja-chimowicza, prof. Stanis∏awa Kocaƒ-d´, prof. Stanis∏awa Oziemskiego,prof. Jerzego Wróbla, a wÊród pra-cowników etatowych Zofi´ Bieszcza-nin, Lucyn´ ¸abudzkà, Teres´ Szyma-nek, Kazimierza Wielgusa.
Aktualnie redakcja ma sta∏y zes-pó∏ wypróbowanych pracownikówi wspó∏pracowników. Od oko∏o 30 latprace administracyjne wykonujep. Maria Popielawska, a redakcjà
technicznà pisma zajmuje si´ panTadeusz Kowalski. Niezwykle skru-pulatne korekty na potrzeby czaso-pisma od kilkunastu lat wykonujep. Barbara Ko∏towska, pliki w for-macie postscriptowym i w pdf ju˝prawie 20 lat zapisuje dla nas paniAnna Wieczorek, dzia∏y tematyczneod kilku lat przygotowuje redaktorMartyna Jachimowicz, a wszystkieprace redakcyjne od 20 lat koordy-nuje sekretarz redakcji Anna Massé.Ich systematyczna praca ma decy-dujàcy wp∏yw na terminowe ukazy-wanie si´ kolejnych zeszytów.
75 lat to pi´kny wiek, ale „PM”czuje si´ m∏ody i dalej chce nadà-˝aç za lawinowym rozwojem naukii techniki w XXI wieku. Aktualnymwyzwaniem ludzkoÊci jest problemoszcz´dnoÊci energii i ochrony Êro-dowiska i dlatego ten pierwszyw roku jubileuszowym numer po-Êwi´camy rozwa˝aniom dotyczàcymnowych metod i rozwiàzaƒ w tymzakresie.
MyÊl´, ˝e zeszyt ten i nast´pneb´dà dla naszych Czytelników inte-resujàce oraz stanà si´ impulsemdo dalszego rozwoju naszego czaso-pisma, któremu ˝ycz´ 100 lat.
Redaktor naczelnyprof. Jan Szlagowski
W zeszycie 2 „Przeglàdu Mechanicznego” (str. 71) opisany zosta∏ 3-cz∏onowy
pociàg motorowy „Zefir”, zaopatrzony w 600-konny silnik firmy „Winton”. Pociàg
ten rozwinà∏ na przestrzeni 431 mil (oko∏o 690 km) Êrednià szybkoÊç 84 mil
(ok. 135 km/h).
Ostatnio Union Pacific Railroad Co. przeprowadzi∏a próbnà jazd´ z nowym
pociàgiem podobnego typu, sk∏adajàcym si´ z jednego wagonu silnikowego, jed-
nego baga˝owego, jednego restauracyjnego oraz trzech wagonów sypialnych.
Ca∏kowita d∏ugoÊç pociàgu wynosi oko∏o 114 m. Wagon silnikowy nap´dzany
jest przez 12-cylindrowy dwusuwowy silnik 900 KM f-my „Winton” w uk∏adzie V.
Silnik ten posiada Êrednic´ cylindra 8" (20,32 mm). Skok t∏oka 10" (254 mm).
Liczba obrotów 750/min. Ârednie ciÊnienie efektywne 5,8 kg/cm2. Wydmuch
odbywa si´ tam przez cztery zawory wylotowe, umieszczone w g∏owicy, prze-
p∏ókiwanie zaÊ przez szczeliny w cylindrze, ods∏aniane przez t∏ok. Waga silnika
gotowego do ruchu wynosi 18000 funtów (ca 8200 kg).
Silnik ten nap´dza pràdnice o wadze 11700 funtów (ca 5300 kg). ¸àczny ci´˝ar
czterech nap´dowych silników elektrycznych wynosi 26400 funtów (ca 11700 kg).
Ca∏kowity ci´˝ar urzàdzeƒ nap´dowych, ∏àcznie z ch∏odnicà i pomocniczym
silnikiem nap´dzajàcym pràdnic´ pràdu zmiennego 200 V (oÊwietlenie) wynosi
79 000 funtów (ca 35 000 kg).
Pociàg ten rozwinà∏ maksymalnà szybkoÊç 122 mil/h, t. j. oko∏o 196 km/h, oraz
przeby∏ przestrzeƒ 820 km z przeci´tnà szybkoÊcià 84 mil/h (ca 135 km/h).
W budowie znajdujà si´ dalsze dwa pociàgi, które posiadaç b´dà po 6 sypialnych
wagonów Pullmanowskich, przyczem do nap´du zostanà u˝yte 16-cylindrowe
silniki „Winton” o mocy 1200 KM.
(Oi1 Engine 1934, zesz. 13, 14, 18, 19).
A. W.
Przeglàd Mechaniczny nr 7/1935
Najszybszy pociàg Êwiata

ROK WYD. LXIX � ZESZYT 1/2010 7
problemy • nowoÊci • informacje
CHCÑC scharakteryzowaç post´p, osiàgni´ty w roku
ubieg∏ym w dziedzinie paliw silnikowych, musimy sobie
przedewszystkiem zdaç spraw´, przez jakiego rodzaju
bodêce ten post´p zosta∏ wywo∏any. Mamy tu wi´c obok
zwi´kszenia czysto technicznych wymagaƒ, zw∏aszcza
ze strony silników lotniczych, równie˝ wzgl´dy usamo-
dzielnienia si´ gospodarczego (Niemcy), a tak˝e ch´ç
wyzyskania produktów ubocznych przy przeróbce po-
chodnych ropy naftowej (Stany Zjednoczone).
Dà˝enia ró˝nych krajóww dziedzinie paliw silnikowych
Tak wi´c coraz wyraêniej zaznaczajà si´ tendencje
stosowania, obok benzyny naturalnej, równie˝ i wytwo-
rzonej z odmiennych surowców benzyny syntetycznej
oraz innych paliw zast´pczych. Odrazu zresztà stwier-
dziç mo˝na, ˝e w dziedzinie tych paliw zast´pczych rok
ubieg∏y nie przyniós∏ nic szczególnie nowego, poza
zwi´kszeniem w Niemczech przymusowej domieszki
alkoholu z 6 do 10%.
We Francji i W∏oszech rok ubieg∏y nie przyniós∏ wogóle
nowych osiàgni´ç w dziedzinie paliw. Francja, doniedaw-
na interesujàca si´ osiàgni´ciami niemieckiemi w dzie-
dzinie up∏ynnienia w´gla kopalnego, ostatnio ho∏duje
zasadzie magazynowania benzyny importowanej oraz
popiera usilnie gazogeneratory na samochodach. Do
stanowiska takiego przyczynia si´ zapewne niedogodne
z wojskowego punktu widzenia po∏o˝enie francuskich
z∏ó˝ w´glowych.
W∏ochy znajdujà si´, pod wzgl´dem paliwowym,
w po∏o˝eniu gorszem jeszcze ni˝ Francja, gdy˝ nie po-
siadajà nietylko w∏asnej nafty, ale, w∏aÊciwie, równie˝
i w´gla, podobnie wi´c jak Francja, popierajà spirytus
oraz gaz generatorowy, majàc tu ju˝ takie osiàgni´cia,
jak np. wóz sportowy na gaz generatorowy o szybkoÊci
przekraczajàcej 100 km/h. Jakkolwiek i w innych krajach
ten rodzaj nap´du si´ rozwija, jak np. w Niemczech, gdzie
istnieje ju˝ szereg linij autobusowych tak nap´dzanych,
to jednak trzeba stwierdziç, ˝e nie osiàgni´to tu jeszcze
ostatecznego rozwiàzania technicznego.
Anglja, jakkolwiek posiada bogate êród∏a nafty w swych
kolonjach, bàdê krajach gospodarczo jej podleg∏ych,
ostatnio wstàpi∏a jednak równie˝ na drog´ gospodar-
czego uniezale˝nienia si´, budujàc du˝à fabryk´ benzyny
syntetycznej z antracytu. Produkcja oparta jest w∏aÊciwie
na metodzie Bergiusa, tylko przystosowanej do rodzaju
w´gla angielskiego, nie mo˝na wi´c tu mówiç o jakichÊ
specjalnie nowych osiàgni´ciach.
JeÊli chodzi o Rosj´, mimo posiadania przez nià bo-
gatych z∏ó˝ ropy naftowej, przy stosunkowo nieznacznej
konsumpcji, dochodzà nas jednak s∏uchy o intensywnej,
pracy na polu paliw syntetycznych i o nowych osiàg-
ni´ciach, których rozwa˝enie musimy jednak od∏o˝yç na
póêniej, wobec braku dostatecznie pewnych danych.
Zdobycze technicznePo l i m e r y z a c j a g a z ó w.
W dziedzinie paliw syntetycznych mamy do zano-
towania trzy wa˝ne wydarzenia. Jedno z nich, to poli-
meryzacja gazów, g∏ównie krakingowych, pozwalajàca
na uzyskanie benzyn pierwszorz´dnych z punktu wi-
dzenia odpornoÊci na detonacj´, bo posiadajàcych liczby
oktanowe z regu∏y wy˝sze od 80, a cz´sto przekracza-
jàce 100. Stany Zjednoczone, w których metoda kra-
kingowa jest bardzo rozpowszechniona, posiadajà ogrom-
ne iloÊci produktów ubocznych krakingu – pod postacià
gazów (przeci´tny sk∏ad: 24% metanu, 13% etanu,
18% etylenu, 37% propylenu i in.), procentowo niezbyt
du˝e, jednak na bezwzgl´dnà miar´ ogromne – wobec
olbrzymiej, niewspó∏miernej z Europà, produkcji benzyn,
– nic wi´c dziwnego, ˝e ch´ç wykorzystania tych gazów
nietylko sk∏oni∏a do licznych badaƒ nad polimeryzacjà,
ale równie˝ doprowadzi∏a do stworzenia produkcji prze-
mys∏owej benzyn „polimeryzacyjnych”. ZdolnoÊç pro-
dukcyjna niektórych tego rodzaju zak∏adów przekracza
150 tonn na dob´1. Na opisywany rozwój mia∏y zapewne
równie˝ wp∏yw wymagania, stawiane przez lotnictwo,
poszukujàce paliw coraz odporniejszych na detonacj´,
a pozwalajàcych na podniesienie mocy w∏aÊciwej silnika.
Pewnà sk∏onnoÊç benzyn polimeryzacyjnych do gu-
mowania (utleniania) usuwa drobny, bo wynoszàcy
zaledwie 0,01% dodatek inhibitora. Proces polimeryzacji
przy u˝yciu katalizatorów mo˝e przebiegaç ju˝ przy
7 do 12 at i 260° C, zaÊ przy ciÊnieniach 70 do 200 at.
i temperaturach do 600° C – nawet bez katalizatorów,
przytem wydajnoÊç przekracza nieraz 1 l/1 m3 gazu, – jest
wi´c zach´cajàca. Nale˝y tu jednak sobie uprzytomniç,
˝e iloÊci gazów krakingowych, jakie mo˝na mieç w paƒ-
stwach europejskich do dyspozycji, sà stosunkowo tak
ma∏e, ˝e zastosowanie polimeryzacji w skali przemys∏owej
mia∏oby znaczenie drugorz´dne.
U w o d o r n i a n i e p r z e m y s ∏ o w e
w ´ g l a k a m i e n n e g o .
Drugiem wa˝nem wydarzeniem by∏o wprowadzenie
w Niemczech uwodorniania w´gla kamiennego w skali
przemys∏owej. Próbna aparatura wypróbowana by∏a w∏aÊ-
ciwie ju˝ w ostatnich miesiàcach r. 1934.2) Metoda ta,
z punktu widzenia mi´dzynarodowego rynku paliw,
mog∏aby si´ spotkaç z zarzutem nierentownoÊci, podobnie
Zagadnienia paliwowe w roku 1935Dr in˝. B. SzczeniowskiDocent Politechniki Warszawskiej
1 Patrz: „Oil and Gas”, 19352 Patrz; Z. d. V. D. I. Nr. 32/1935

ROK WYD. LXIX � ZESZYT 1/20108
problemy • nowoÊci • informacje
3 „Przeglàd Mechaniczny” Nr. 19/1935
jak znana ju˝ metoda Bergiusa up∏ynniania w´gla
brunatnego, jakkolwiek jest od tej ostatniej nieco taƒ-
sza, zastosowana jednak zosta∏a w Niemczech w skali
przemys∏owej przedewszystkiem ze wzgl´dów samo-
wystarczalnoÊci gospodarczej, czyli po prostu t. zw.
„obrony”, wiadomo bowiem, ˝e z obecnego zapotrze-
bowania Êrodków nap´dowych, wynoszàcego oko∏o
2 miljonów tonn rocznie, tylko trzecià cz´Êç pokrywa∏y
Niemcy z produkcji krajowej.
B e n z y n a s y n t e t y c z n a
z g a z u w o d n e g o .
Trzeciem wa˝nem wydarzeniem, równie˝ w Niem-
czech, by∏o przemys∏owe rozwiàzanie wynalezionej ju˝
w 1925 roku przez Fischera i Tropscha metody otrzy-
mywania benzyny syntetycznej z gazu wodnego, bàdê
innych gazów przemys∏owych3. I tu przyczyny posta-
wienia produkcji by∏y zapewne te same, co poprzednio.
Pozostaje jeszcze wspomnieç o paliwach gazowych,
spr´˝anych w butlach. W dziedzinie tej, poza opisanà
w Nr. 23 „Przeglàdu Mech.” próbà zastosowania
w Niemczech gazu koksownianego, niema nic nowego
do zanotowania, o ile pominiemy post´py, osiàgni´te
w dziedzinie wytwarzania samych butli.
Zagadnienie paliwa silnikowego w PolsceTakie sà osiàgni´cia poza naszemi granicami. A u nas?
O ile pozostawimy na uboczu prace nad mieszankami,
jako wykonane ju˝ dawniej, stwierdziç musimy, ˝e poza
próbami stosowania krakingu nic si´ w∏aÊciwie na szerszà
skal´ na odcinku paliwowym nowego nie dzieje. Ten
stan rzeczy uzasadniaç wprawdzie mo˝na g∏´bokim
kryzysem „motoryzacyjnym”, jaki Polska prze˝ywa.
Je˝eli jednak weêmiemy z jednej strony pod uwag´,
˝e kryzys ten minie, bo musi minàç – w imi´ naj-
˝ywotniejszych naszych potrzeb, zaÊ z drugiej strony –
nasze „trudne” i b´dàce na wyczerpaniu z∏o˝a ropy
naftowej, jasne si´ staje, ˝e ju˝ czas najwy˝szy pomyÊ-
leç o paliwach zast´pczych, – o ile nie mamy byç ska-
zani na import Êrodków nap´dowych. Badania za-
graniczne i nasze stwierdzi∏y ju˝, ˝e spirytus, jako
domieszka dopuszczalny, a nawet po˝àdany, nie mo˝e
byç brany, przynajmniej narazie, pod uwag´ jako sa-
modzielne paliwo silnikowe na szerokà skal´. Jakie˝
sà wi´c mo˝liwoÊci? Na to pytanie odpowiedzieç mo˝e
tylko placówka badawcza, specjalnie zagadnieniu paliw
poÊwi´cona, a której jaknajrychlejsze utworzenie jest
zagadnieniem pierwszorz´dnej donios∏oÊci. Z surowców
posiadamy zarówno drzewo, w´giel, jak i gaz ziemny;
spirytus surowy mo˝e równie˝, ze wzgl´du na specjalne
warunki gospodarczo-rolnicze naszego kraju, z powodze-
niem odegraç rol´ produktu wyjÊciowego. Chodzi tylko
o inicjatyw´ oraz zapewnienie Êrodków, narazie choçby
minimalnych, na podj´cie badaƒ. Zauwa˝my, ˝e ob-
cià˝enie ceny 1 1 paliwa kwotà jednego grosza na ten
cel da∏oby ju˝ oko∏o miljona z∏otych rocznie. Ten grosz
nie musi zresztà pójÊç z kieszeni konsumenta, jest to
bowiem drobiazg w porównaniu z sumà 28 groszy
w postaci op∏at i podatków, z których 19 groszy idzie na
cele czysto fiskalne, – nie mówiàc ju˝ o tem, ˝e takie
drobne uszczuplenie podatku le˝y nietylko w interesie
spo∏ecznym, ale, na dalszà met´, korzystne jest równie˝
z punktu widzenia dochodów Skarbu Paƒstwa.
Przeglàd Mechaniczny nr 1/1936

ROK WYD. LXIX � ZESZYT 1/2010 9
problemy • nowoÊci • informacje
Kolejna edycja targów EURO-TOOL odby∏a si´ w Krakowie w ter-minie 20 – 23 paêdziernika 2009 r.W targach wzi´∏o udzia∏ ponad250 wystawców z 20 krajów re-prezentujàcych 600 producentówobrabiarek, narz´dzi i wyposa˝eniatechnologicznego. WielkoÊç ekspo-zycji przekroczy∏a 3500 m2. W ofer-cie targowej znalaz∏y si´ wyrobynajbardziej poszukiwane na ryn-ku: wysoko zautomatyzowane, wy-sokowydajne obrabiarki, precyzyj-ne narz´dzia o du˝ej trwa∏oÊci,nowoczesne urzàdzenia kontrolno--pomiarowe i nowe technologieobróbki materia∏ów. Na targachobecne by∏y firmy oferujàce do-radztwo finansowe, doradztwo wzakresie certyfikacji wyrobów obra-biarkowych i narz´dzi, konsultacjetechniczne oraz us∏ugi badawczei in˝ynieryjne.
Wielu wystawców zaprezen-towa∏o innowacyjne rozwiàzaniai nowe produkty. Firma AMKOVOSp. z o.o. prezentowa∏a tokark´uniwersalnà firmy TRENS a.s.,a AMP Sp. z o.o. innowacyjnetechnologie projektowania urzà-dzeƒ do obróbki cieplnej, nowo-czesne pakiety izolacji dla piecówpró˝niowych, nowoczesne urzà-dzenia do obróbki cieplnej, w tymlutowania i spiekania. APX TECH-NOLOGIE Sp. z o.o. pokaza∏a cen-trum tokarskie sterowane nume-rycznie japoƒskiej firmy MORI SEIKItyposzeregu NZ, zaprojektowa-ne do wysokowydajnej produkcjimasowej. Integracja w jednej ob-rabiarce dwóch symetrycznychwrzecion (elektrowrzeciono 22 kW,6000 obr/min) i do trzech g∏owic(3 x 16 pozycji narz´dziowych; sil-nik nap´du bezpoÊredniego BMT®
7,5 kW na narz´dziu nap´dzanym)
wyposa˝onych opcjonal-nie w oÊ Y – zakres ruchu110 mm realizowany zapomocà ramy oktago-nalnej (system ORC®)oraz praca z pr´tem oÊrednicy do 65 mm,umo˝liwia integracj´ ope-racji tokarsko-frezarskichi pozwala na gotowowykonaç nawet bardzoskomplikowane elementy na jednejobrabiarce. AVIA S.A. prezentowa-∏a tokark´ CNC ze skoÊnym ∏o˝emAVIATurn 30M, wyposa˝onà w ste-rowanie osi C, umo˝liwiajàcà zain-stalowanie obrotowych narz´dzi,a tak˝e pionowe centrum obróbko-we serii VMC o wyjàtkowo sztywnejkonstrukcji i najwy˝szej klasy kom-ponentach. DOLFAMEX Sp. z o.o.oferowala frezy trzpieniowe w´g-likowe „DOLFA 4-SNX” do wydajnejobróbki materia∏ów trudno obra-bialnych: stali nierdzewnych, kwa-soodpornych, stopów na bazietytanu i niklu. Firma GORBREXMACHINERY TRADE Sp. z o.o.prezentowa∏a Centrum TokarskieCNC Goodway GLS-200M z nap´-dzanymi narz´dziami, osià C, ko-nikiem programowalnym o Êred-nicy toczenia 280 mm, d∏. obróbki340 mm i maks. przelocie pr´ta51 mm. KOVOSVIT MAS POLSKASp. z o.o. w tym roku równie˝przedstawia swoje nowoÊci. Jestto nowa seria pó∏automatów to-karskich typu SP430. Modu∏owawersja maszyny o maksymalnejÊrednicy obróbki 430 mm umo˝-liwia zestawienie ca∏ego szereguwariantów technologicznych: odtokarki z dwiema osiami sterowa-nymi, a˝ po centrum tokarskiez osià Y, wrzeciennikiem przeciw-nym i dolnà g∏owicà narz´dziowàz nap´dzanymi narz´dziami. FirmaMexim s.c., przedstawiciel reno-mowanych producentów maszyndo obróbki skrawaniem i obróbkiplastycznej, zaprezentowala szli-fierk´ do p∏aszczyzn z poziomà osiàwrzeciona produkcji bia∏oruskiejfirmy Krasny Borets. Obrabiarkaprzeznaczona jest do obróbki p∏asz-czyzn ró˝nych wyrobów metodàszlifowania, jak równie˝ przy za-stosowaniu przyrzàdów do profi-lowania tarczy szlifierskiej i usta-
wiania elementów, powierzchniprofilowanych, rowków, wyst´póworaz szlifowania powierzchni czo-∏owej tarczy w granicach ograni-czonych os∏onà tarczy szlifierskiej.PFN PAFANA S.A. pokaza∏a m.in.nowy wyrób – frez nasadzany czo-∏owy R626.62-125. PHmet Sp. z o.o.oferowa∏a du˝à gam´ demagne-tyzerów p∏ytowych, r´cznych i tu-nelowych. Na szczególnà uwag´w tej grupie zas∏ugujà demagne-tyzery p∏ytowe, które znajdujà sze-rokie zastosowanie w narz´dziow-niach, warsztatach, przy liniachprodukcyjnych. Umo˝liwiajà oneodmagnesowanie przedmiotów ta-kich jak ∏o˝yska, narz´dzia, formy,Êruby i t∏oczniki. RENISHAW Sp.z o.o. podczas tegorocznej wystawyzaprezentowa∏a bogaty wybór in-nowacyjnych rozwiàzaƒ w zakresie:systemów do ustawiania przed-miotu, narz´dzi oraz kontroli naobrabiarkach CNC; systemów diag-nostycznych obrabiarek CNC; wy-posa˝enia wspó∏rz´dnoÊciowychmaszyn pomiarowych; trzpieni po-miarowych do sond inspekcyjnychi sond do ustawiania narz´dzi;systemów do precyzyjnego po-miaru przemieszczenia liniowegoi kàtowego; systemów laserowychdo oceny stanu technicznego i ka-libracji obrabiarek CNC oraz maszynwspó∏rz´dnoÊciowych. Firma RO-MATEX na targach EUROTOOL2009 pokaza∏a 5-osiowe centrumszlifierskie CNC firmy MichaelDeckel. Istotne cechy maszyny to:bezpoÊrednie nap´dy wszystkichosi obrotowych, opatentowany pio-nowy uk∏ad narz´dzia, 6-pozycyj-ny automatyczny wymieniacz Êcier-nic i sonda pomiarowa w stan-dardzie, nowoczesny sterownik PC.Maszyna ma zwartà budow´, zaj-muje ma∏o miejsca i zapewnia ∏atwydost´p do przestrzeni roboczej.
EUROTOOL 2009
fot. am
fot. am

ROK WYD. LXIX � ZESZYT 1/201010
problemy • nowoÊci • informacje
HANNOVER MESSE to przyjaznaplatforma spotkaƒ dla firm prze-mys∏owych przyciàgajàca wystaw-ców i goÊci z ca∏ego Êwiata. Wprzysz∏ym roku, w ramach hano-werskich targów, które odb´dà si´w terminie 19 – 23 kwietnia, zainau-gurowane zostanà dwie nowe im-prezy bran˝owe CoilTechnica orazMobiliTec.
CoilTechnica to nowa wa˝na im-preza uzupe∏niajàca bogate spekt-rum targów odbywajàcych si´ w ra-mach HANNOVER MESSE. Produ-cenci transformatorów, cewek i sil-ników elektrycznych zaprezentujàszeroki wybór produktów i us∏ug.
Targi CoilTechnica odbywaç si´b´dà co dwa lata. W 2010 r. zloka-lizowane zostanà w bardzo ucz´sz-czanej hali 6, w bezpoÊredniej blis-koÊci targów automatyki przemys-∏owej Industrial Automation oraz tar-gów sektora energetycznego i dos-tawców dla przemys∏u Energy andIndustrial Supply.
Partnerem imprezy CoilTechnicajest Sekcja Producentów Podzespo-∏ów dzia∏ajàca w ramach Central-nego Zwiàzku Przemys∏u Elektro-technicznego i Elektronicznego ZVEI(Zentralverband Elektrotechnik-und Elektronikindustrie).
Wystawcy targów CoilTechnicab´dà mogli skorzystaç z obecnoÊcireprezentantów ró˝nych bran˝ i na-wiàzaç kontakty biznesowe. Naj-wa˝niejsze obszary tematyczne pre-mierowej edycji CoilTechnica to ma-teria∏y izolacyjne, cewki i uzwojeniacewkowe, nawijarki, wyposa˝enieprodukcyjne, podzespo∏y i akcesoriaelektroniczne, a tak˝e systemy dotestowania, pomiaru i diagnostyki.Uzupe∏nieniem targów CoilTechnicab´dzie kongres bran˝owy, w czasie
którego du˝y nacisk po∏o˝ony zos-tanie na prezentacj´ nowych tren-dów technologicznych oraz techno-logi´ wytwarzania transformatorów,cewek i silników elektrycznych.
MobiliTec to zupe∏nie nowa im-preza targowa uzupe∏niajàca bogatàtematyk´ HANNOVER MESSE. Jejzakres tematyczny to g∏ównie nap´-dy elektryczne i hybrydowe, mobilnesystemy magazynowania energii,paliwa alternatywne oraz innowa-cyjne êród∏a energii. Na HANNOVERMESSE 2010 pokazane zostaniebardzo szerokie spektrum techno-logii w s∏u˝bie ludzkiej mobilnoÊci.Dla tej interesujàcej tematyki wy-brano ucz´szczanà i centralnie zlo-kalizowanà hal´ 27.
Na HANNOVER MESSE 2010 naj-wi´kszy w Europie pawilon wysta-wienniczy po raz pierwszy zarezer-wowany zostanie dla firm i insty-tutów prezentujàcych osiàgni´ciaw zakresie ogniw paliwowych i na-p´dów wodorowych. Wystawa taznajdowaç si´ b´dzie w bezpoÊred-nim sàsiedztwie targów MobiliTecoraz cz´Êci targów energetyki po-Êwi´conej odnawialnym êród∏omenergii. W Hydrogen + Fuel CellsPavilion swe produkty i us∏ugi za-prezentuje oko∏o 150 wystawcówz 25 krajów Êwiata. B´dà wÊród nichnie tylko du˝e mi´dzynarodowekoncerny, lecz równie˝ firmy ma∏ei Êrednie, a tak˝e instytuty ba-dawcze. Ich oferta obejmie bardzobogaty zakres tematyczny: od uzys-kiwania wodoru, poprzez ogniwapaliwowe – równie˝ przenoÊne i mo-bilne, ró˝ne zastosowania ogniwpaliwowych oraz systemy testujà-ce, po transport wodoru, koncepcjesk∏adowania i ca∏à zwiàzanà z tyminfrastruktur´.
Rozszerzona oferta HANNOVER MESSE 2010
ZAK¸ADY MECHANICZNE „TAR-NÓW” S.A. zaprezentowa∏y dwieobrabiarki: szlifierk´ uniwersalnàRUP-280 oraz tokark´ uniwersal-na LZ-400. Szlifierka uniwersalnaRUP-280 o szybkoÊci skrawania45 m/s przeznaczona jest do szli-fowania powierzchni obrotowychzewn´trznych i wewn´trznych, za-równo cylindrycznych, jak i sto˝-kowych, oraz p∏askich czó∏ przed-miotów okràg∏ych i ko∏nierzy. To-karka uniwersalna LZ-400 na licen-cji niemieckiej firmy G.D.W. jestprzeznaczona do precyzyjnego wy-konywania cz´Êci Êredniej wielkoÊ-ci w zakresie dok∏adnoÊci narz´-dziowej wg DIN 8605. Ma du˝à roz-pi´toÊç pr´dkoÊci obrotowej wrze-ciona (dwuzakresowy bezstopnio-wy nap´d), szeroki zakres posuwóworaz skoków nacinanych gwintów:metrycznych, calowych, modu∏o-wych i Diametral Pitch.
Komisja Konkursowa pod prze-wodnictwem prof. dr. hab. in˝.Józefa Gawlika oceni∏a zg∏oszonedo konkursu rozwiàzania i przyz-na∏a nast´pujàce nagrody:
– w kategorii obrabiarkiDU˚EGO SMOKA WAWELSKIE-
GO otrzyma∏a firma STIGAL za wy-palark´ plazmowà sterowanà CNCDYNAMIC produkcji firmy STIGAL
MA¸EGO SMOKA WAWELSKIE-GO otrzyma∏a firma RADZIS¸AWFRANCZAK RAFELA za wyci-nark´ laserowà EASY CUT EC1030D/0002 produkcji firmy EasyLaser
– w kategorii narz´dziaMA¸EGO SMOKA WAWELSKIE-
GO otrzyma∏a firma SAINT-GOBAINABRASIVES Sp. z o.o. za Êciernicediamentowe NORTON MSL pro-dukcji firmy Saint-Gobain Abra-sives INC
– w kategorii aparatura pomia-rowo-kontrolna
DU˚EGO SMOKA WAWELSKIE-GO otrzyma∏a firma PRIMA POLSKA
Sp. z o.o. za urzàdzenie pomiaroweFLATSCOPE 2D CNC produkcjifirmy Werth Messtechnik GmbH
– w kategorii oprzyrzàdowanietechnologiczne
MA¸EGO SMOKA WAWELSKIE-GO otrzyma∏a firma PHmet Sp.z o.o. za demagnetyzer tunelowyDEM-T1 produkcji firmy WalkerBraillon Magnetics
Targom towarzyszy∏a konferen-cja INTELTRANS Wydzia∏u Mecha-nicznego Politechniki Krakowskiej.Ka˝dego targowego dnia odbywa-
∏y si´ te˝ seminaria tematyczne,przygotowane przez wystawców.Instytut Mechaniki Precyzyjnej zor-ganizowa∏ seminarium poÊwi´co-ne technologiom obróbki cieplnejpodwy˝szajàcym trwa∏oÊç narz´dzi,natomiast Instytut Zaawansowa-nych Technologii Wytwarzania przy-gotowa∏ seminarium poÊwi´conemikrotechnologiom wytwarzaniawe wspó∏czesnym przemyÊle. Fir-ma Walter Polska przygotowa∏a dlaswoich klientów konferencj´ „Nowenarz´dzia do nowych wyzwaƒ”.
fot. am

ROK WYD. LXIX � ZESZYT 1/2010 11
problemy • nowoÊci • informacje
„... Du˝y koszt paliwa stanowi prze-
szkod´ w eksploatacji, i to nietylko
materjalnà, ale i psychicznà, wià˝àc
bezpoÊrednio ka˝dy kilometr drogi
z powa˝nym wydatkiem. Jednak
ograniczanie eksploatacji zwi´ksza
obcià˝enie wydatkami sta∏emi i jest
sprzeczne z duchem motoryzacji,
podniecajàcym do je˝d˝enia coraz
wi´cej i coraz pr´dzej. To te˝
zmniejszenie kosztu paliwa – to
intensywna eksploatacja, obni˝enie
kosztów sta∏ych na 1 km i tem
wi´kszy spadek ca∏kowitego kosztu
przejazdu kilometra. Jako dalszà
konsekwencj´, pociàgnàç to musi
wzrost iloÊci taboru kursujàcego,
tendencj´ do ulepszenia dróg, a przez
to dalszy wzrost szybkoÊci, wzmo-
˝enie eksploatacji i spadek wszyst-
kich pozosta∏ych sk∏adników kosztu
ca∏kowitego.
Do tego celu mo˝emy zdà˝aç
dwiema drogami: 1) przez zmniej-
szenie oporów oraz 2) przez stoso-
wanie taniego paliwa.
1) Zmniejszenie oporów drogo-
wych odbywa si´ przez polepsze-
nie zawieszenia i ogumienia. Praca
w tym kierunku jest prowadzona
bardzo intensywnie we wszystkich
krajach, jednak zmniejszenie opo-
rów post´puje bardzo powoli – zato
du˝e rezultaty osiàga si´ przez
umo˝liwienie zwi´kszania szybkoÊci
i przez ochronienie samochodu od
wstrzàsów. Wp∏ywa to g∏ównie na
zmniejszenie kosztów amortyzacji
i napraw, w mniejszym stopniu na
koszta sta∏e i koszta ogumienia,
najmniej na koszta paliwa.
Zmniejszenie oporów powietrza
powoduje przedewszystkiem
oszcz´dnoÊç na paliwie, w mniej-
szym stopniu na kosztach sta∏ych.
Osiàga si´ je przez zmian´ opro-
filowania nadwozia oraz przez
zmiany konstrukcyjne w podwoziu
(obni˝enie).
Samochód z roku 1920, przy
wadze 1 000 kg, napotyka∏ opór
powietrza przy 50 km/h 30 kg, przy
70 km/h – 60 kg, przy 100 km/h
— 120 kg (przez ekstrapolacj´).
Taki˝ samochód z roku 1930,
obni˝ony i wyd∏u˝ony, ma opory
powietrza 2 razy mniejsze; taki˝
samochód o kszta∏tach op∏ywowych,
o konstrukcji jeszcze ma∏o rozpow-
szechnionej, który za kilka lat b´dzie
ogólnie budowany, ma opór powiet-
rza jeszcze 3 — 4 razy mniejszy.
Jednak to zmniejszenie oporu
powietrza jest równowa˝one przez
stosowanie zwi´kszonych szybkoÊci:
gdy samochód z roku 1920 jecha∏
z szybkoÊcià 50 km/godz., samochód
roku 1930 równie cz´sto osiàgaç
b´dzie 70 km, zaÊ przysz∏y samo-
chód roku 1940 — 120 km/godz.
Ka˝dy z nich przy swojej szybkoÊci
b´dzie spotykaç ten sam opór po-
wietrza.
2) Gdy inne Êrodki okazujà si´
nie doÊç skuteczne, zachodzi ko-
niecznoÊç zwrócenia si´ do taƒszego
paliwa.
Rozró˝niamy nast´pujàce Êrodki
obni˝enia ceny paliwa:
a) Ulepszenie pracy silnika, by
przez spalenie tej samej iloÊci ben-
zyny uzyskaç wi´kszà iloÊç konio-
godzin. Stosowany indywidualnie
– zmniejsza nieco wydatek, stoso-
wany ogólnie – odcià˝a nieco rynek
benzynowy z popytu (dzia∏ajàc na
zni˝k´ ceny), jednak w stopniu
mniejszym, ni˝ wzrost iloÊci kur-
sujàcych samochodów w d∏u˝szym
okresie czasu.
b) Stosowanie paliw zast´pczych
do silników gaênikowych – miesza-
nek alkoholowych i benzolowych,
benzyny krakowej, benzyny gazo-
linowej i in., mniej lub wi´cej roz-
powszechnionych. Rola ich polega na
odcià˝eniu rynku, stwarzajàc dla
benzyny tendencj´ lekko zni˝kowà.
c) Zastàpienie silników gaêni-
kowych przez wysokopr´˝ne ma za-
kres, ograniczony do ci´˝kich samo-
chodów ci´˝arowych. Jakkolwiek
nowsze konstrukcje mogà byç sto-
sowane do pojazdów coraz l˝ejszych,
to jednak konkurujà one w tej
kategorji z trudnoÊcià, ze wzgl´du
na du˝à wag´ i cen´ silnika, oraz
szybsze jego zu˝ywanie si´. Nawet
najpomyÊlniejsze rozwiàzania kon-
strukcyjne silnika spowodujà szyb-
sze jego zu˝ywanie si´, gdy˝ wymaga
on paliwa o specjalnych w∏asnoÊ-
ciach, otrzymywanego w ograniczo-
nej iloÊci, i wzrost liczby silników
wysokopr´˝nych podniesie cen´
paliwa do granic op∏acalnoÊci za-
miany rodzaju silnika.
d) Silnik na paliwo sta∏e rokuje
najwi´cej mo˝liwoÊci. Typem jego
dzisiejszym jest silnik z generato-
rem gazowym, typem przysz∏oÊci
b´dzie prawdopodobnie silnik na
py∏ w´glowy. Równie˝ zdobywajà
prawo obywatelstwa silniki, w
których wytwarzanie gazu odbywa
si´ w instalacji sta∏ej, np. w gazowni
miejskiej, a gaz w postaci gotowej
w butlach zabierany jest na samo-
chód.
Jednak najwi´cej danych do szyb-
kiego rozwoju i popchni´cia na-
przód rozwoju motoryzacji w blis-
kiej przysz∏oÊci – posiada samochód
ze zmontowanym na nim genera-
torem.
Jego zakres jest szerszy, ni˝ samo-
chodu gaênikowego: w gór´ – do naj-
silniejszych ci´˝arowych, na których
benzyna si´ nie op∏aca, w dó∏ – do
lekkich osobowych, a nawet, jako
osobliwoÊç, istniejà ju˝ motocykle
z generatorami.”
Ârodki zmniejszenia kosztów paliwa
K. Grosglik-Groniowski: Tanie paliwo jako droga do motoryzacji.Przeglàd Mechaniczny nr 10/1935

ROK WYD. LXIX � ZESZYT 1/201012
problemy • nowoÊci • informacje
Fot. 1 (mj)
Fot. 2 (mj)
Fot. 3 (mj)
Od 3 do 7 marca 2010 r. na nowychterenach targowych w Monachiumodb´dzie si´ kolejna ju˝ edycja nie-zwykle popularnych w Niemczechi za granicà Specjalistycznych Tar-gów Techniki i Wyposa˝enia War-sztatów – IHM PROFI, imprezy pre-zentujàcej ca∏y wachlarz ró˝norod-nych ofert w zakresie techniki i wy-posa˝enia warsztatów. Prezentowa-ne na tych targach innowacyjnerozwiàzania i technologie wyznacza-jà kierunek rozwoju ca∏ej bran˝y.Ich poprzednia edycja zgromadzi∏aa˝ 72 610 odwiedzajàcych.
Ekspozycja targów IHM PROFIzaprezentowana zostanie w dwóchhalach (B1 i B2) o ∏àcznej powierzchni22 000 m2. Jednym z najwa˝niejszychobszarów tematycznych b´dzie kom-pleksowa oferta skierowana do prze-mys∏u motoryzacyjnego.
Oferta nadchodzàcej edycji targówb´dzie obejmowa∏a m.in. nast´pu-jàce zagadnienia: cz´Êci zamienne +
elektronika i elektryka + maszyny,urzàdzenia i narz´dzia specjalistycz-ne + materia∏y i surowce + osprz´tsamochodowy + podnoÊniki + pro-dukty chroniàce przed korozjà +produkty lakiernicze + silniki i skrzy-nie biegów + smary do silnikówi maszyn + urzàdzenia diagnostycz-ne i pomiarowe + urzàdzenia s∏u˝àcedo pomiaru emisji spalin + wypo-sa˝enie warsztatów samochodowych+ wyposa˝enie myjni samochodo-wych + opony i felgi + wyposa˝e-nie stacji paliw + bezpieczeƒstwoi ochrona pracy + frezarki + maga-zynowanie + maszyny, urzàdzeniai narz´dzia specjalistyczne + na-rz´dzia i maszyny do obróbki drewnai tworzyw sztucznych + narz´dziai maszyny do obróbki metali + na-rz´dzia i maszyny do obróbki szk∏ai ceramiki + odzie˝ robocza + pojaz-dy u˝ytkowe + szlifierki + wewnàtrz-zak∏adowy transport + wiertarki +wyposa˝enie warsztatów.
Druga edycja targów BLECHPolska odby∏a si´ 27 – 29 paêdzier-nika na terenie Centrum Targowe-go w Kielcach. By∏o to wa˝ne wy-darzenie dla firm zajmujàcych si´produkcjà, obróbkà i dystrybucjàblach.
60 wystawców z 12 krajów zapre-zentowa∏o swojà ofert´. Tematykatargów obejmowa∏a: maszyny, linietechnologiczne, narz´dzia oraz ma-teria∏y stosowane w procesach for-mowania, t∏oczenia, walcowania,rozwiàzania w zakresie automatyzacjiprocesów produkcji, technologii gi´-cia blach, ∏àczenia, technologii la-serowych, systemów CAD/CAM, ob-róbki powierzchni, kontrol´ jakoÊci,instalacje przemys∏owe i magazyno-we, ochron´ Êrodowiska i recykling.
Wi´kszoÊç wystawców BLECHPolska 2009 stanowili zagraniczniproducenci i firmy us∏ugowe, g∏ów-nie z Niemiec i W∏och.
WÊród wystawców by∏y tak znanefirmy, jak ThyssenKrupp Stahl-Ser-vice-Center (ThyssenKrupp Stal Ser-wis Polska) (fot. 1) oferujàca klien-tom nowoczesne technologie ob-róbki stali czy te˝ dzia∏ajàca na ryn-ku od 1890 r. firma AMF AndreasMaier GmbH & Co.KG dostarczajàcana rynek zaciski, Êruby i zamki. Wielefirm zaprezentowa∏o innowacyjnewyroby i technologie. Oferowanaprzez w∏oskà firm´ IMEAS polerkaATN Polishing Machine ma zaim-plementowany innowacyjny systemumo˝liwiajàcy wykorzystywanie jejzarówno w liniach w pe∏ni zauto-matyzowanych, jak te˝ w zak∏adachstarszego typu; jest ona bardzopor´czna, a jej konstrukcja opartazosta∏a na koncepcji modu∏owej.Firma HEL-WITA Sp. z o.o. przedsta-wi∏a ofert´ pras mechanicznych,serwopras, automatów wykrawajà-
co-t∏oczàcych (fot. 2). Firma DAYTONPROGRESS GmbH prezentowa∏aelementy do wyt∏aczarek – specjalnezaawansowane podzespo∏y do ma-szyn i narz´dzi stosowanych w ob-róbce plastycznej, ci´ciu i wyt∏acza-niu blach. Firma DEMIS SDV-SantioliAG specjalizujàca si´ w obróbcepowierzchniowej z wykorzystaniemtechnologii szlifowania na sucho ofe-rowa∏a ulepszonà niedawno przezfirm´ obrabiark´ wielofunkcyjnàz serii TOP-K do szlifowania i szczot-kowania powierzchni z wykorzys-taniem tego samego modu∏u. Szli-
fierki szerokotaÊmowe serii TOP-SAmajà zakres pracy w granicach1500 – 2000 mm i przeznaczone sàzarówno do obróbki p∏askich arku-szy z blachy, jak zwojów blaszanych.Firma AGTOS Polska Sp. z o.o. (fot. 3)oferowa∏a oczyszczarki strumienio-we. Zastosowana w nich innowa-cyjna technologia filtrowania poz-wala na szybkà i bezproblemowàwymian´ wk∏adów dzi´ki ich spec-jalnemu sto˝kowemu kszta∏towi.GSW Group pokaza∏a na targachurzàdzenia do odprowadzania od-padów oraz technologie szybkiejwymiany narz´dzi.
BLECH Polska 2009
Specjalistyczne Targi Techniki i Wyposa˝enia Warsztatów – IHM PROFI 2010

ROK WYD. LXIX � ZESZYT 1/2010 13
problemy • nowoÊci • informacje

ROK WYD. LXIX � ZESZYT 1/201014
problemy • nowoÊci • informacje
Obecnie dla konstruktorów po-jazdów wyzwaniem jest zaprojek-towanie samochodu nowej gene-racji. Powinien on spe∏niaç jed-noczeÊnie wiele wymagaƒ doty-czàcych efektywnoÊci, kosztów orazochrony Êrodowiska. Wymagania temogà byç spe∏nione przez za-stosowanie w produkcji samo-chodów zaawanso-wanych technologiii materia∏ów.
Wiele firm po-szukuje rozwiàzaƒw tym zakresie. Wniemieckiej firmie
emisji spalin. Innowacyjne zawie-szenie skrzyni biegów jest jednymz pierwszych lekkich elementówkonstrukcyjnych stosowanych wprzemyÊle samochodowym. Ele-ment wykonany z tworzywa sztucz-nego mo˝e byç formowany w ni˝-szych temperaturach ni˝ jegoodpowiednik wykonany ze stopu
aluminium, co zmniejsza energo-ch∏onnoÊç procesu produkcji. Jed-noczeÊnie istnieje wi´cej mo˝liwoÊcirecyklingu tego typu cz´Êci.
Kolejnym celem jest zmniejsze-nie emisji gazów spalinowych przezpopraw´ efektywnoÊci procesu spa-lania. Trwajà prace nad nowà gene-racjà silników o du˝ej pojemnoÊci,pracujàcych przy ciÊnieniach prze-kraczajàcych 3 bary. Silniki takiewymagajà zastosowania specjal-nych przewodów ciÊnieniowych(fot. 3). W tym celu wykorzystanonowy materia∏ b´dàcy po∏àczeniemdzianiny i gumy. Przewody i linieprzewodów, produkowane przezfirm´ ContiTech AG, ∏àczà wszystkiewa˝niejsze elementy i zespo∏y cz´Êciwyst´pujàce w nowoczesnych sa-
mochodach. Sà za-projektowane tak,aby zmniejszaçemisj´ tlenkówazotu, przesy∏açw sposób bez-pieczny nowe ro-dzaje paliw oparte
Narz´dzia CoroThread 266 mogà byçstosowane we wszystkich ga∏´ziach prze-mys∏u do wykonywania gwintów wszyst-kich typów i we wszystkich typach ma-teria∏ów obrabianych, przy zachowaniuwi´kszej precyzji oraz lepszej symetrii.Asortyment obejmuje p∏ytki o zarysiepe∏nym, zarysie V i p∏ytki wielopunktowe.
Nowa p∏ytka o wielkoÊci 16 uzupe∏niaistniejàcy asortyment p∏ytek o wielkoÊ-ciach 22 i 27, cechujàcy si´ wyjàtkowàsztywnoÊcià systemu CoroThread 266®
oferujàc korzyÊci p∏ynàce z zastosowa-nia unikatowego z∏àcza iLock™. Trójkàtnap∏ytka skrawajàca ma po jednym rowkuustalajàcym dla ka˝dego z trzech ostrzy.Rowki nachodzà na wypuk∏à szyn´ pro-wadzàcà p∏ytki podporowej zamocowa-nej w oprawce, umo˝liwiajàc ustawieniep∏ytki we w∏aÊciwej pozycji w gnieêdzie.Rozwiàzanie to umo˝liwia zmniejszenie si∏skrawania i poprawia zarówno precyzj´wykonania gwintu, jak i trwa∏oÊç narz´-dzia.
Konstrukcja zapewnia równomiernyrozk∏ad si∏ dzia∏ajàcych na p∏ytk´ podczasobróbki, eliminujàc powstawanie punk-tów spi´trzenia napr´˝eƒ, dzi´ki czemup∏ytka i oprawka majà korzystne warunkipracy. Skutkuje to zwi´kszeniem trwa∏oÊcinarz´dzi i oprawek oraz nieprzerwanàobróbkà.
Wysoki poziom stabilnoÊci CoroThread266® jest cechà umo˝liwiajàcà wyko-nywanie gwintów o ró˝nych zarysach przymniejszej liczbie przejÊç i z wi´kszàdok∏adnoÊcià. Obs∏uga narz´dzia zosta∏aznaczàco uproszczona dzi´ki dok∏adnemupozycjonowaniu p∏ytki, co pozwala naskrócenie czasu przeznaczonego nawymian´ narz´dzi.
Do narz´dzi systemu CoroThread 266®
Sandvik Coromant wprowadza przez-naczony do toczenia gwintów gatunekw´glika GC1125. Dzi´ki wyjàtkowej kom-pozycji zapewniajàcej wydajne gwin-towanie, uwzgl´dniajàcej lepszà odpor-noÊç na temperatur´ i zu˝ycie, GC1125daje wy˝szà precyzj´ toczenia gwintówprzez d∏u˝szy czas. Liczne testy wykaza∏y,˝e gatunek ten zapewnia wymaganetolerancje gwintu przy jednoczeÊniemniejszej liczbie przejÊç.
ContiTech AG opracowano olejo-odporne paski rozrzàdu, które mogàbyç stosowane zamiast ∏aƒcuchównap´dów pomp olejowych lub ele-mentów wa∏u rozrzàdu (fot. 1). Takierozwiàzanie wp∏ywa znaczàco nazmniejszenie emisji CO2, poniewa˝zastosowanie pasków nap´du po-woduje zmniejszenie zu˝ycia paliwaze wzgl´du na mniejsze tarcie, a tak-˝e zmniejsza ha∏as.
Innym przyk∏adem innowacji mo˝ebyç rozrusznik o nap´dzie pasowymwyposa˝ony w specjalne wielorow-kowe pasy klinowe (V-ribbed belts)produkcji ContiTech AG. Jego za-stosowanie zmniejsza zu˝ycie paliwaw ruchu miejskim o 5 – 10%.
Lekka konstrukcja pojazdu równie˝istotnie wp∏ywa na zmniejszenie
Innowacyjne rozwiàzaniadla przemys∏u motoryzacyjnego
Fot. 1. CONTI® OILRUNNER – pasek na-p´du rozrzàdu zast´-pujàcy ∏aƒcuch roz-rzàdu (fot. ContiTech)
Fot. 2. Zawieszenieskrzyni biegów wy-konane z tworzywasztucznego zmniej-sza wag´ pojazdu(fot. ContiTech)
Fot. 3. Specjalne przewody ciÊnieniowedla nowej generacji silników wykonanesà z materia∏u b´dàcego po∏àczeniemdzianiny i gumy (fot. ContiTech)
P∏ytka CoroThread®
na surowcach odnawialnych orazzwi´kszaç efektywnoÊç instalacjiklimatyzacyjnej.

ROK WYD. LXIX � ZESZYT 1/2010 15
problemy • nowoÊci • informacje
Zak∏ad Kolporta˝u WydawnictwaSIGMA-NOT Sp. z o.o.ul. Ku WiÊle 700-707 Warszawatel. (0-22) 840 30 86,tel./fax (0-22) 840 35 89Konto: BPH S.A. Oddzia∏ w Warszawiepl. gen. Hallera 653 1060 0076 0000 4282 1000 0012
RUCH S.A. Oddzia∏ Warszawaoraz oddzia∏y w ca∏ym krajuInfolinia: 0-804 200 600www.ruch.com.pl
KOLPORTER S.A.ul. Strycharska 624-659 KielceInfolinia: 0-800 400 500
GARMOND PRESS S.A.ul. Nakielska 301-106 Warszawatel. (0-22) 836 70 59, 836 70 08www.garmond.com.pl
Redakcja PRZEGLÑD MECHANICZNYul. Racjonalizacji 6/8, 02-673 Warszawatel. (0-22) 853 81 13
(0-22) 843 02 01 w. 255www.przegladmechaniczny.plCena 1 egz. w 2010 r. – 20 z∏
Cena prenumeraty w 2010 r. (w tym VAT)wersja drukowana na noÊniku CD (pdf)kwartalnie – 60 z∏ kwartalnie – 36,60 z∏pó∏rocznie – 120 z∏ pó∏rocznie – 73,20 z∏rocznie – 240 z∏ rocznie – 146,40 z∏Redakcja przyjmuje zamówienia na prenumerat´ przezca∏y rok. Warunkiem przyj´cia i realizacji zamówienia jestotrzymanie z banku potwierdzenia wp∏aty.Prenumerata ze zleceniem wysy∏ki za granic´ – dla osóbprawnych i fizycznych – jest dwukrotnie wy˝sza.Wp∏at na prenumerat´ mo˝na dokonaç na ogólnie dost´p-nych blankietach w urz´dach pocztowych (przekazy pie-ni´˝ne) lub w bankach (polecenie przelewu), przekazujàcÊrodki pod adresem:Instytut Mechanizacji Budownictwa i Górnictwa Skalnego
„Przeglàd Mechaniczny”ul. Racjonalizacji 6/8, 02-673 Warszawa
konto: BPH S.A. O/Warszawa97 1060 0076 0000 3210 0014 6850
Na blankiecie wp∏aty nale˝y podaç liczb´ egzemplarzy,okres prenumeraty oraz adres wysy∏kowy.
WARUNKI PRENUMERATY„Przeglàdu Mechanicznego” w 2010 r.
Prenumerat´ czasopisma mo˝na zamawiaç za poÊrednictwem nast´pujàcych instytucji:

ROK WYD. LXIX � ZESZYT 1/201016
problemy • nowoÊci • informacje

ROK WYD. LXIX � ZESZYT 1/2010 17
Prof. dr hab. in˝. Jan Szlagowski jest pracownikiemWydzia∏u SiMR PW, a mgr in˝. Andrzej Skrocki jest pra-cownikiem firmy Bosch Rexroth Sp. z o.o.
W ostatnich latach widoczny jest szybki rozwójautomatyzacji maszyn roboczych. Spowodowane jestto m.in. znacznym spadkiem cen elementów elektro-nicznych oraz zwi´kszajàcymi si´ wymaganiamistawianymi nowoczesnym maszynom roboczym.G∏ówne z nich to: oszcz´dnoÊç energii, wzrost wy-dajnoÊci i dok∏adnoÊci pracy, poprawienie komfortui bezpieczeƒstwa pracy operatora oraz ochrona Êro-dowiska przez zmniejszenie emisji zanieczyszczeƒ.Podstawowe czynnoÊci maszyn roboczych wykonu-jàcych prace w cyklu automatycznym to m.in. procesdok∏adnego pozycjonowania narz´dzia lub prze-mieszczania przedmiotów [1].
Jednym z automatyzowanych ruchów maszynyroboczej (np. koparki) jest obrót o zadany kàt lubz zadanà pr´dkoÊcià platformy (nadwozia, na którymznajduje si´ narz´dzie robocze). Bardziej precyzyjnepozycjonowanie ∏y˝ki pozwala na szybsze wykony-wanie wykopów, w sposób oszcz´dniejszy, dok∏ad-niejszy, a tym samym z mniejszym wp∏ywem nazanieczyszczenie Êrodowiska i zm´czenie operatora.
Zautomatyzowane maszyny specjalne mogà byçwykorzystywane jako manipulatory pracujàce w te-renach niebezpiecznych lub wykonujàce czynnoÊcizagra˝ajàce cz∏owiekowi, jak np. prace na obszarzeska˝onym, usuni´cia niewybuchu itp. Innym za-stosowaniem mogà byç nap´dy du˝ych anten, scenobrotowych w teatrach i wiele innych. Dla tychaplikacji precyzyjne ruchy z zachowaniem odpo-wiedniej precyzji ustawiania narz´dzia i szybkoÊciwykonywania ruchów sà bardzo wa˝ne.
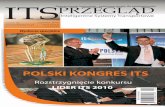
Badane silniki wolnoobrotowe (rys. 1): t∏okowy pro-mieniowy i orbitalny wed∏ug katalogów majà mini-malne pr´dkoÊci obrotowe, odpowiednio 1 obr/mini 10 obr/min, przy pr´dkoÊci maksymalnej odpo-wiednio 900 obr/min i 240 obr/min, ale wymogi narozpi´toÊç pr´dkoÊci niektórych ruchów manipula-tora sà znacznie wi´ksze. Dla badanego/zak∏ada-nego systemu minimalna pr´dkoÊç powinna wyno-siç ok. 0,02 – 0,03 obr/min, przy wymaganej roz-pi´toÊci pr´dkoÊci obrotowej oko∏o 1500. Zastoso-wanie wielostopniowej przek∏adni mechanicznejw celu obni˝enia pr´dkoÊci obrotowej wykluczam.in. dok∏adnoÊç pozycjonowania, jakà musi spe∏niaçnap´d mechanizmu obrotu maszyny specjalnej, lubobni˝y sprawnoÊç uk∏adu.
Aby zrealizowaç wymagania funkcjonalne stawia-ne nowoczesnym mechanizmom obrotu, zdecydo-
wano o zastosowaniu sterowania mikroprocesoro-wego tych silników pracujàcych w uk∏adzie regulacjiautomatycznej.
Zastosowanie mikroprocesorowego systemu re-gulacji pr´dkoÊci i po∏o˝enia umo˝liwia uzyskanielepszych parametrów badanych uk∏adów nap´-dowych wykorzystujàcych badane silniki hydraulicz-ne, rozszerzajàc zakres ich stosowania.
Badania porównawczeuk∏adu regulacji mikroprocesorowejdla uk∏adów nap´dzanych silnikamihydraulicznymi ma∏ych pr´dkoÊci obrotowych
ANDRZEJ SKROCKIJAN SZLAGOWSKI
W artykule opisano stanowisko badawcze orazprzedstawiono wyniki badaƒ porównawczych. Sta-nowisko badawcze nap´du hydraulicznego mecha-nizmu obrotu, zbudowane na bazie minikoparki,umo˝liwia wykonywanie ruchów obrotowych w pe∏-
Rys. 1. Widok stanowiska laboratoryjnego: a) widok na za-z´bienie silnika t∏okowego, b) widok na zaz´bienie silnikaorbitalnego

ROK WYD. LXIX � ZESZYT 1/201018
nym zakresie kàta i pomiar po∏o˝enia z dok∏adnoÊ-cià 0,05°.
Zastosowano p∏yty redukcyjne umo˝liwiajàce wy-mian´ silników i przebadanie zachowania si´ uk∏a-dów dla silników hydraulicznych: t∏okowego pro-mieniowego MR160 produkcji firmy Calzoni i orbi-talnego GMSW320 produkcji firmy Rexroth w za-∏o˝onym zakresie pr´dkoÊci obrotowej.
Silniki hydrauliczne� Silnik t∏okowy promieniowy MR160Pierwszym silnikiem, który zastosowano na sta-
nowisku laboratoryjnym, by∏ silnik wolnoobrotowyt∏okowy promieniowy MR160. Parametry tego silnikaoraz silnika orbitalnego GMSW320 zosta∏y przed-stawione w tabeli.
Elementami wyporowymi silnika t∏okowego (rys. 2)sà cylindry i s∏upy cieczy, które przenoszà momentobrotowy na wa∏ zdawczy. Konstrukcja silnika jestbardzo oryginalna. Na krzywk´ wewn´trznà wyko-nanà na wale w postaci mimoÊrodu 2 wywierajànacisk si∏y, z których powstaje moment obrotowy. Si∏tych nie wytwarzajà t∏oki czy korbowody, lecz s∏upycieczy znajdujàce si´ w komorzecylindra E. Tuleje 6 i 7 s∏u˝àwy∏àcznie do uszczelnienia tychs∏upów cieczy. Wskutek tegozmniejszone jest tarcie, którew typowych tego rodzaju silni-kach wyst´puje mi´dzy krzywkàa dociskanymi do niej t∏okami
Rys. 2. Przekrój silnika hydraulicznegot∏okowego MR160-1. 1 – korpus, 2 – wa∏z mimoÊrodem, 3 – g∏owica, 4 – po-krywa rozrzàdu, 5 – ∏o˝yska toczne,6 – tuleja zewn´trzna, 7 – tuleja wew-n´trzna, 8.1 – tarcza rozdzielcza, 8.2 –p∏yta rozdzielcza, 8.3 – pierÊcieƒ reak-cyjny, 9 – komora; A, B – wejÊcia,C – wylot przecieków, D – kana∏ dolo-towy, E – komora cylindra, F – komoraprzecieków
Rys. 3. Przekrój silnika orbitalnego.1 – korpus, 2 – wa∏ zdawczy, 3 – wa∏Cardana, 4 – ko∏o o zaz´bieniu wew-n´trznym, 5 – rolka, 6 – ko∏o o zaz´-bieniu zewn´trznym, 7 – wa∏ek tarczyrozdzielczej, 8 – tarcza rozdzielcza,9 – gniazdo przy∏àczeniowe [4]
bàdê korbowodami, dzi´ki czemu silniki te majà bar-dzo du˝à sprawnoÊç.
� Silnik orbitalny GMSW320Silniki orbitalne (rys. 3) cechujà si´: prostà i zwartà
konstrukcjà o ma∏ej liczbie cz´Êci i ma∏ej masie,wysokim ciÊnieniem roboczym, du˝à ch∏onnoÊciài niskà pr´dkoÊcià obrotowà, co umo˝liwia wytwa-rzanie du˝ych mocy. Ponadto wyró˝niajà si´ ma∏àpulsacjà ch∏onnoÊci, wysokà sprawnoÊcià oraz cicho-bie˝nà pracà [2, 3]. Te cechy silników orbitalnychumo˝liwiajà spe∏nienie postawionych wymagaƒ.Elementami wyporowymi silnika orbitalnego sà dwako∏a z´bate o zaz´bieniu cykloidalnym wewn´trz-nym 4 i zewn´trznym 6. Ko∏o o zaz´bieniu zew-n´trznym ma o 1 zàb mniej w stosunku do ko∏ao zaz´bieniu wewn´trznym. Równoleg∏e zasilaniewielu komór roboczych utworzonych przez ma∏e ko∏o6 i wspó∏pracujàce z nim ko∏o zewn´trzne 4 umo˝li-wia uzyskanie du˝ych ch∏onnoÊci w∏aÊciwych, a tymsamym i du˝ych wartoÊci momentów na wa∏kuwyjÊciowym 2. Du˝e ch∏onnoÊci w∏aÊciwe umo˝li-wia orbitujàce (w przeciwnym kierunku ni˝ obrotywa∏u 2) ko∏o 6 [5]. Wspó∏praca kó∏ w silniku orbi-talnym polega na tym, ˝e wszystkie z´by obu kó∏pozostajà we wzajemnym kontakcie wzd∏u˝ linii z´ba.Charakter tej wspó∏pracy sprawia, ˝e smarowaniepowierzchni pozostajàcych w stycznoÊci z´bów niejest wystarczajàce i powoduje wyst´powanie znacz-nych oporów tarcia, co widoczne jest szczególnie przyniskich pr´dkoÊciach obrotowych.
Konstrukcja silnika orbitalnego GMSW320, o pa-rametrach wg tab., utrudnia stosowanie go przyniskich pr´dkoÊciach obrotowych (tzn. zdecydowanie
Porównanie parametrów technicznych silnika t∏okowegoMR160 i orbitalnego GMSW320
MR160 GMSW320
Ch∏onnoÊç w∏aÊciwa, cm3 159,7 325,7CiÊnienie nominalne, bar 250 140Moment nominalny, Nm 635 540Min. obroty, obr/min 1 10

ROK WYD. LXIX � ZESZYT 1/2010 19
poni˝ej minimalnych obrotówgwarantowanych przez produ-centa). Pomimo tego zdecydo-wano si´ zbadaç silnik orbitalnyi sprawdziç, czy uk∏ad „mikro-procesorowej” regulacji automa-tycznej jest w stanie odpowied-nio sterowaç i poprawiç para-metry jego pracy przy niskich obrotach.
Aby lepiej poznaç zachowanie si´ uk∏adu nap´-dowego z silnikiem orbitalnym, nale˝a∏o go zamo-delowaç i wykonaç symulacj´ komputerowà jegopracy. Mia∏o to daç odpowiedê na pytanie, czy w ogólemo˝liwe jest wykorzystanie silnika orbitalnego za-miast (dro˝szego) silnika t∏okowego do nap´duplatformy. Do tego celu wykorzystano programMATLAB Simulink [6]. ZnajomoÊç specyfiki pracy
silnika orbitalnego pozwoli∏a nazbudowanie odpowiednich algo-rytmów sterowania pr´dkoÊciàtego silnika. Na rys. 4 przedsta-wiono model komory roboczej.Zmian´ obj´toÊci komory roboczejzamodelowano funkcjà sinus. Ko-mory robocze na zmian´ nape∏-niajà si´ i opró˝niajà w ustalonymcyklu. Podczas jednego obrotunast´puje 7 x 6 = 42 nape∏nieƒi tyle samo opró˝nieƒ komór ro-boczych. Zmiany obj´toÊci komórroboczych przedstawiono na rys. 5.
Przebieg ch∏onnoÊci silnikazosta∏ przedstawiony na rys. 6.Widoczne sà wyraêne t´tnienia
Rys. 4. Model komory roboczej silnikaorbitalnego
Rys. 5. Zmiana obj´toÊci komór roboczych w silniku orbitalnym
Rys. 6. Przebieg ch∏onnoÊci silnika orbitalnego
Rys. 7. Schemat funkcjonalny sta-nowiska badawczego [7]
(42 na 1 obrót silnika). Ten charakter pracy utrudniasterowanie silnikiem przy ma∏ych pr´dkoÊciachobrotowych.
Opis stanowiska badawczego
KoniecznoÊç zrealizowania sprzecznych wymagaƒfunkcjonalnych stawianych manipulatorom, w szcze-gólnoÊci dok∏adnoÊci pozycjonowania, a jednoczeÊ-

ROK WYD. LXIX � ZESZYT 1/201020
nie uzyskania/utrzymania du˝ejniezawodnoÊci zmusi∏a do przy-j´cia mo˝liwie najprostszegouk∏adu nap´du obrotu. Jest tonap´d z jednostopniowà prze-k∏adnià z´batà o prze∏o˝eniui = 6,666, z∏o˝onà z ∏o˝yska wieƒ-cowego zaz´bionego z ko∏em z´-batym osadzonym na wale silnikahydraulicznego (rys. 7).
Silnik zasilany jest z zasilaczahydraulicznego z pompà o sta∏ejwydajnoÊci przez zawór elektro-hydrauliczny typu serwo z prze-kryciem zerowym. Ze wzgl´du nawymagania funkcjonalne nap´duzastosowano wersj´ serwoza-woru z przekryciem zerowym.Taka konstrukcja zaworu umo˝-liwia jednoczeÊnie pozycjono-wanie i sterowanie pr´dkoÊciàobrotowà. Zmiana pr´dkoÊci ob-rotowej silnika dokonywana jestprzez d∏awienie przep∏ywu, aregulacja pr´dkoÊci przez zmian´ napi´cia zasila-jàcego cewk´ zaworu elektrohydraulicznego.
Do pomiaru pozycji oraz pr´dkoÊci zastosowanojeden czujnik – enkoder optyczny. Enkoder wysy∏a douk∏adu mikrokontrolera informacje o aktualnej pozycjiplatformy, które w odniesieniu do jednostki czasuinformujà o rzeczywistej pr´dkoÊci. Zespó∏ mikro-kontrolera umo˝liwia porównanie wartoÊci rzeczy-wistych z wartoÊcià zadanà i generuje sterujàcy syg-na∏ elektryczny do serwozaworu, w celu osiàgni´ciazadanej wartoÊci pr´dkoÊci.
Ca∏y uk∏ad jest sterowany z komputera nadrz´d-nego. Program umo˝liwia sterowanie oraz akwizycj´danych (pr´dkoÊci i po∏o˝enia) dla ró˝nych nastaw:czasów próbkowania, jak równie˝ wzmocnieƒ regu-latorów pr´dkoÊci i pozycjonowania [8].
Stanowisko badawcze sk∏ada si´ z trzech pod-zespo∏ów:
– komputera z oprogramowaniem umo˝liwiajà-cym sterowanie pracà nap´du i rejestrowanie infor-macji o aktualnym po∏o˝eniu, pr´dkoÊci i sterowaniuuk∏adu,
– pakietu sterownika odbierajàcego poleceniez komputera i regulujàcego prac´ uk∏adu nap´-dowego, oraz
– uk∏adu wykonawczego – mechanizmu nap´duobrotu minikoparki.
Na rys. 8 przedstawiono schemat hydraulicznyzrealizowanego uk∏adu.
Silnik elektryczny 13 nap´dza pomp´ hydraulicznàz´batà 14 o sta∏ym wydatku (12 dm3/min). T∏oczonyolej jest kierowany do zaworu elektrohydraulicz-nego typu serwo 7. W po∏o˝eniu beznapi´ciowymprzewody hydrauliczne ∏àczàce rozdzielacz z silnikiemsà zamkni´te, a pompa pracuje na przelew. Silnikhydrauliczny przez jednostopniowà przek∏adni´ z´-batà nap´dza wieniec z´baty ∏o˝yska, na którymzamocowano obcià˝niki zast´pujàce bezw∏adnoÊç.
Zainstalowany w uk∏adzie blok zaworowy 5, zwanyzaworem krzy˝owym, z∏o˝ony jest z dwóch zaworówprzelewowych 6 oraz dwóch zaworów zwrotnych 4.Spe∏nia on rol´ zabezpieczenia przed nag∏ym wzros-tem ciÊnienia w przypadku gwa∏townego zahamo-wania silnika. WartoÊç ciÊnienia ograniczona jestnastawà zaworów przelewowych. Tworzàce si´ pod-ciÊnienie w kanale ssawnym sprzyja powstawaniukawitacji. Aby uniknàç tego zjawiska, w bloku zawo-rowym zainstalowane sà równie˝ zawory zwrotne,którymi w razie potrzeby jest zasysany olej ze zbior-nika. Dzi´ki temu uzyskuje si´ efekt hamowaniaw ruchu obrotowym.
Rys. 8. Schemat hydrauliczny stanowiska badawczego: 1 – ∏o˝yskowieƒcowe, 2 – silnik hydrauliczny wolnoobrotowy, 3 – p∏ytaprzy∏àczeniowa, 4 – zawór zwrotny, 5 – zawór krzy˝owy, 6 – zawórprzelewowy, 7 – elektrohydrauliczny serwo, 8 – zawór przelewowy,9 – zawór zwrotny, 10 – filtr ciÊnieniowy, 11 – ch∏odnica, 12 – filtroddechowy, 13 – silnik nap´dowy, 14 – pompa o sta∏ym wydatku
Rys. 9. Widok ekranu przedstawiajàcy rejestracj´ przebiegupr´dkoÊci obrotowej platformy i napi´cia sterujàcego – re-gulacja pr´dkoÊci

ROK WYD. LXIX � ZESZYT 1/2010 21
Rys. 10. Widok stanowiska badawczego
Rys. 11. Wykresy przedstawiajàce przebiegi pr´dkoÊci i sterowania silników przy regulowanym napi´ciu zasilajàcym serwozawórdla okresu próbkowania 100 ms i zadanej pr´dkoÊci 200 DZ/s (0,183 obr/min) oraz wzmocnienia reg.ca∏.= 2: a) silnik orbitalny,b) silnik t∏okowy
Przyk∏adowy widok ekranu komputera z przebie-gami pr´dkoÊci i sterowania przedstawiono na rys. 9.Na rys. 10 przedstawiono zdj´cie stanowiska badaw-czego z zasilaczem hydraulicznym.
Wyniki z badaƒ porównawczychsilników hydraulicznych
W pracy zamieszczono tylko wybrane najbardziejcharakterystyczne przebiegi, które ukazujà cechybadanych nap´dów mechanizmu obrotu. Wykresyprzedstawiajà przebiegi czasowe pr´dkoÊci obroto-wej platformy i sygna∏u sterowania serwozaworem.Na stanowisku badawczym zbierane by∏y danew jednostkach, jakie uzyskiwane sà z enkodera, orazjednostkach binarnego s∏owa sterowania, które jestzamieniane na napi´cie w przetworniku cyfrowo--analogowym. Jednostka kàta obrotu podawana jestw dzia∏kach DZ (1 DZ odpowiada 1/216 cz´Êci obrotu),a jednostki sterowania w dz (odpowiada napi´ciusterowania serwozaworem wynoszàcym 2 mV, przyzakresie ± 4 V).
Na rys. 11 przedstawiono przebiegi pr´dkoÊcii sterowania platformy dla takich samych wartoÊcizadanych i parametrów regulatora przy zastoso-waniu ró˝nych silników. Zadana pr´dkoÊç obroto-wa platformy wynosi 200 DZ/s, tj. 0,183 obr/min(1,22 obr/min – pr´dkoÊç obr. silnika hydrauliczne-go). Na wykresie zaznaczono przebieg pr´dkoÊcijako n [obr/min], a przebieg sterowania jako S [V].
Na rys. 11a przedstawiono przebieg pr´dkoÊcii sterowania dla silnika orbitalnego dla zadanej pr´d-koÊci 200 DZ/s (tj. 0,183 obr/min). Uk∏ad regulacjistara si´ stabilizowaç pr´dkoÊç na za∏o˝onym po-ziomie. Widzimy wyraênà reakcj´ uk∏adu regulacjina odchylenia od zadanej pr´dkoÊci. Uk∏ad regu-lacji odczytuje co okres próbkowania (100 ms)rzeczywistà pr´dkoÊç i porównuje jà z pr´dkoÊciàzadanà. Je˝eli wyst´puje uchyb pr´dkoÊci, to w zale˝-noÊci od ustawionych wzmocnieƒ poszczególnychregulatorów wp∏ywa na sygna∏ sterujàcy cewkà

ROK WYD. LXIX � ZESZYT 1/201022
serwozaworu. Je˝eli uk∏ad odczyta, ˝e chwilowa pr´d-koÊç rzeczywista jest wi´ksza od za∏o˝onej, wtedyodpowiednio zmniejsza sygna∏ napi´cia na cewk´serwozaworu, d∏awiàc przep∏yw. Je˝eli rzeczywistachwilowa pr´dkoÊç jest ni˝sza od za∏o˝onej, wtedyzwi´ksza przep∏yw. B∏àd Êredniej pr´dkoÊci podczastego przebiegu wynosi poni˝ej 0,1%. Na podstawieprzeprowadzonych badaƒ widaç, ˝e stosujàc regu-lacj´ automatycznà, mo˝na wyraênie poprawiç prac´silników hydraulicznych orbitalnego i t∏okowego,rozszerzajàc tym zakres ich zastosowania. Warto wi´crozwijaç takie systemy.
Na rys. 11b przedstawiony jest przebieg stabili-zowanej pr´dkoÊci silnika t∏okowego. Mo˝emy zau-wa˝yç wyraêne najszybsze zmiany zmierzonych pr´d-koÊci wyst´pujàce w miejscach zmiany kierunkuruchu t∏oków silnika.
Przebieg pr´dkoÊci silnika t∏okowego jest stabil-niejszy ni˝ silnika orbitalnego. Wynika to z jego cechkonstrukcyjnych. Widzimy wyraênie ∏agodniejszàreakcj´ uk∏adu regulacji dla silnika t∏okowego w po-równaniu z silnikiem orbitalnym. Pr´dkoÊç obrotowasilników podczas tego przebiegu wynosi 1,22 obr/min.Odnoszàc to do danych katalogowych minimalnychobrotów, widzimy, ˝e silnik t∏okowy pracuje w zakresieobrotów gwarantowanych przez producenta. Na-tomiast silnik orbitalny pracuje zdecydowanie poni˝ejobrotów gwarantowanych przez producenta.
Na rys. 12 widzimy porównanie przebiegów ba-danych silników dla najni˝szej mo˝liwej do uzyska-nia pr´dkoÊci obrotowej dla silnika orbitalnego, przyktórej da∏o si´ skutecznie stabilizowaç pr´dkoÊç.Na wykresie 12a przedstawiony jest przebieg silnikaorbitalnego, natomiast na wykresie 12b przebiegsilnika t∏okowego. Zadanà pr´dkoÊcià dla obu silni-ków by∏a pr´dkoÊç 10 DZ/s – 0,0092 obr/min plat-formy, co odpowiada 0,061 obr/min pr´dkoÊci silnika,dla czasu próbkowania 100 ms. Tym samym uda∏osi´ uzyskaç zadowalajàco stabilnà pr´dkoÊç obro-tów platformy dla pr´dkoÊci oko∏o 163 razy ni˝szejni˝ podawana w katalogu pr´dkoÊç minimalna dlasilnika orbitalnego oraz 16 razy ni˝szej dla silnikat∏okowego.
Widzimy, ˝e dla tych samych parametrów prze-biegi sà bardzo stabilne, a uk∏ad regulacji nadal po-prawnie reaguje na zmiany pr´dkoÊci. Porównujàcoba silniki, widzimy, ˝e zgodnie z przewidywaniamiuk∏ad z silnikiem t∏okowym zachowuje si´ o wielelepiej. Zarówno przebieg pr´dkoÊci, jak i sterowaniajest bardzo stabilny w porównaniu z uk∏adem z sil-nikiem orbitalnym.
W obu przypadkach widaç, ˝e uk∏ad poprawniepracuje i w zadowalajàcym stopniu reaguje na zmianypr´dkoÊci i stabilizuje jà.
Kolejne wykresy zamieszczone na rys. 13 przed-stawiajà porównanie przebiegów pr´dkoÊci i stero-
Rys. 12. Wykresy przedstawiajàce przebiegi pr´dkoÊci i sterowania przy regulowanym napi´ciu zasilajàcym serwozawór dla okresupróbkowania 100 ms i zadanej pr´dkoÊci 10 DZ/s (0,0092 obr/min) dla wzmocnienia reg.prop. = 2, reg.ca∏. = 4: a) silnika orbi-talnego, b) silnika t∏okowego

ROK WYD. LXIX � ZESZYT 1/2010 23
wania dla czasu próbkowania 100 ms i zadanejpr´dkoÊci 50 DZ/s – 0,046 obr/min (0,3 obr/min sil-nika). Podobnie jak na przedstawionych wykresach,widzimy ∏agodniejszy przebieg dla silnika t∏okowe-go (rys. 13b) ni˝ dla silnika orbitalnego (rys. 13a).Niemniej jednak uk∏ad regulacji poprawnie pracujei stabilizuje zadanà pr´dkoÊç. Na wykresie pr´dkoÊcisilnika orbitalnego widzimy wyraêne szybkie zmianypr´dkoÊci co oko∏o 4,66 s, na które poprawnie i bardzodynamicznie reaguje uk∏ad regulacji. Te powtarzajàcesi´ regularne piki odpowiadajà chwilowym maksy-malnym nape∏nieniom komór mi´dzyz´bnych. Innasytuacja ma miejsce na wykresie silnika t∏okowego.Na jeden obrót silnika wyst´puje 10 szybkich zmianpr´dkoÊci. Wyst´pujà one w miejscach zmiany kie-runku ruchu t∏oków silnika.
WnioskiNa stanowisku badawczym uzyskano bardzo dobre
wyniki sterowania pr´dkoÊcià platformy w zakresiema∏ych pr´dkoÊci dla badanego uk∏adu zarównoz silnikiem t∏okowym, jak i orbitalnym. Lepsze para-metry uzyska∏, zgodnie z przewidywaniami, silnik t∏o-kowy promieniowy. Silnik t∏okowy promieniowy jestsilnikiem dro˝szym i lepszym, natomiast silnik orbi-talny jest silnikiem bardzo tanim, niezalecanym dotakich aplikacji. Mimo to zachowywa∏ si´ poprawnie.Zastosowanie mikroprocesorowego sterowania w obuprzypadkach polepszy∏o parametry pracy silników,
rozszerzajàc tym samym zakres ich stosowania. Do-bierajàc odpowiednie parametry regulatorów uda∏osi´ uzyskaç dla silnika orbitalnego (Vmin = 10 obr/min)sterowalnoÊç mechanizmem obrotu w zakresie0,0092 obr/min (0,00096 rad/s) ÷ 6,68 obr/min(0,7 rad/s), uzyskujàc krotnoÊç prze∏o˝enia na po-ziomie 700.....
Dobór odpowiednich parametrów regulatorówsilnika t∏okowego promieniowego (Vmin = 1 obr/min),umo˝liwi∏ uzyskanie sterowalnoÊci w zakresie0,0048 obr/min (0,0005 rad/s) ÷ 6,68 obr/min(0,7 rad/s), uzyskujàc krotnoÊç na poziomie 1400.Przy czym górne ograniczenie pr´dkoÊci wynika∏owy∏àcznie z wydatku zastosowanej pompy.
Uk∏ad regulacji pr´dkoÊci oraz pozycjonowaniapracowa∏ poprawnie z oboma badanymi silnikamiprzy tych samych nastawach regulatorów. Dlategonadaje si´ do zastosowania w podobnych aplikacjach.
Stwierdzono, ˝e nap´d obrotu z uk∏adem auto-matycznej regulacji spe∏nia podstawowe wymaganiafunkcjonalne, a wi´c mo˝e s∏u˝yç jako nap´d w ma-szynie specjalnej (np. roboty do usuni´cia niewy-buchu, nap´dy radarów itp.), gdzie jest wymaganadu˝a dok∏adnoÊç pozycjonowania obrotu i utrzy-mywanie p∏ynnej zmiany pr´dkoÊci obrotowej.
O wiele lepiej daje si´ sterowaç silnik t∏okowypromieniowy, który jest dro˝szy. Koszt silnika orbi-talnego jest kilkukrotnie ni˝szy, ale równie˝ zacho-wuje si´ poprawnie. Zastosowanie tego silnika
Rys. 13. Wykresy przedstawiajàce przebiegi pr´dkoÊci i sterowania przy regulowanym napi´ciu zasilajàcym serwozawór dla okresupróbkowania 100 ms i zadanej pr´dkoÊci 50 DZ/s (0,046 obr/min) dla wzmocnienia reg.ca∏. = 2: a) silnika orbitalnego, b) silnikat∏okowego

ROK WYD. LXIX � ZESZYT 1/201024
znacznie obni˝a koszt ca∏ego nap´du, umo˝liwiajàczastosowanie tego rozwiàzania równie˝ w taƒszychmaszynach.
Na podstawie przeprowadzonych badaƒ stwier-dzono, ˝e stosujàc regulacj´ automatycznà, mo˝nawyraênie poprawiç prac´ silników hydraulicznychorbitalnego i t∏okowego, rozszerzajàc tym zakres ichzastosowania. Warto wi´c rozwijaç takie systemy.
LITERATURA1. Szlagowski J.: Problemy automatyzacji pracy maszyn ro-
boczych. Wyd. MET, Warszawa 2001.2. Balawender A.: Analiza energetyczna i metodyka badaƒ
silników hydraulicznych wolnoobrotowych. Monografia.Zeszyty Naukowe P. Gdaƒskiej, Mechanika LIV, nr 422/1988,Gdaƒsk.
3. Stryczek J.: Projektowanie wysokosprawnych pomp i sil-ników hydraulicznych na przyk∏adzie maszyn gerotorowychi orbitalnych. Rozdzia∏ 5 pracy zbiorowej. Kierunki rozwojunap´dów hydraulicznych i konstrukcji maszyn roboczych.Fluid Power Net Publication, Kraków 1999.
4. Szydelski Z.: Nap´d i sterowanie hydrauliczne. WK¸, War-szawa 1999.
5. Stryczek S.: Nap´d hydrostatyczny. WNT, Warszawa 1997.6. Mrozek B., Mrozek Z.: Matlab 6: poradnik u˝ytkownika.
Wyd. PLJ, Warszawa 2001.7. Miros∏aw T., Szlagowski J., ˚ebrowski Z.: Control and posi-
tion control of rotary drive in the working machine. DrittesDeutsch-Polnisches Seminar „Innovation und Fortschritt inder Fluidtechnik“, Zakopane 1999.
8. Miros∏aw T.: Metodyka sterowania elektrohydraulicznymnap´dem obrotu w zakresie ma∏ych pr´dkoÊci. Rozprawadoktorska. PW, Warszawa 2003.
Dr in˝. Aneta Masternak-Janus jest pracownikiem Poli-techniki Âwi´tokrzyskiej w Kielcach, a prof. dr hab. in˝.Andrzej Kocaƒda jest pracownikiem Politechniki War-szawskiej.
System transferu technologii (TT) umo˝liwiaefektywny przebieg procesów transferu technologii.Sk∏ada si´ z trzech poziomów: poziomu decydentów,poziomu wsparcia transferu technologii, poziomuwykonawców badaƒ i innowacji. WÊród krajów UEinteresujàce sà systemy TT wyst´pujàce w Irlandii,Finlandii i Niemczech. Wspierajà one skuteczniemechanizmy TT, dzi´ki czemu wp∏ywajà na wzrostinnowacyjnoÊci i konkurencyjnoÊci. W polskim sys-temie transferu technologii od lat dokonujà si´ zmia-ny majàce na celu dopasowanie do potrzeb gospo-darki opartej na wiedzy. Korzystanie z doÊwiadczeƒpaƒstw rozwini´tych w zakresie stosowania naj-lepszych praktyk w budowaniu systemu transferutechnologii mo˝e przyczyniç si´ do polepszeniasytuacji w tworzeniu i wdra˝aniu nowych rozwiàzaƒdo praktyki gospodarczej.
Wprowadzenie
W dobie przechodzenia do gospodarek opartych nawiedzy tworzenie nowych technologii i ich transfernabiera coraz wi´kszego znaczenia. Innowacyjnerozwiàzania zapewniajà szybki wzrost gospodarczyi dobrobyt spo∏eczeƒstwa. Mogà powodowaç przejÊ-cie krajów mniej rozwini´tych na wy˝szy stopieƒ„drabiny technologicznej”. Transfer technologii poz-wala natomiast na uzyskanie nowych technologiiprzez wdra˝anie efektów prac badawczo-rozwo-jowych. Dlatego celem polityki naukowej i techno-logicznej wielu paƒstw jest wprowadzanie mecha-nizmów wspomagajàcych procesy transferu tech-nologii, tak aby przebiega∏y one sprawnie i efek-tywnie. WÊród stosowanych dzia∏aƒ sà: zwi´kszanie
nak∏adów na prace badawczo-rozwojowe, pobudzanieprzedsi´biorczoÊci, powo∏ywanie instytucji, którychmisjà jest stymulowanie dzia∏aƒ innowacyjnychw przemyÊle i us∏ugach, zapewnianie dost´pu dowykwalifikowanej kadry naukowej pracujàcej przytworzeniu wynalazków.
W dzisiejszych czasach wynalazca musi byç nietylko naukowcem, ale równie˝ sprzedawcà w∏asnegopomys∏u. Z ka˝dym pomys∏em nale˝y si´ przebiç,a najcz´stszym problemem jest zdobycie Êrodkówkoniecznych do jego zrealizowania. Najbardziej roz-wini´te kraje na Êwiecie pomagajà naukowcomi przedsi´biorcom w tworzeniu nowych rozwiàzaƒi wdra˝aniu ich do komercyjnych zastosowaƒ. W tymcelu niezb´dne jest istnienie sprawnego systemutransferu technologii, czyli systemu wprowadzonegow ˝ycie po to, aby umo˝liwiç efektywny przebiegprocesów TT. W wi´kszoÊci krajów mo˝na wyró˝niçtrzy poziomy sk∏adajàce si´ ze struktur organiza-cyjnych zapewniajàcych pozyskiwanie i wdra˝aniewynalazku w gospodarce:
– poziom decydentów, czyli rzàd i jego cia∏a do-radcze, który mo˝e w∏àczaç si´ w procesy innowa-cyjne i transfer technologii poprzez odpowiedniàpolityk´ naukowo-technologicznà,
– poziom wsparcia, czyli ró˝ne oÊrodki innowacjii przedsi´biorczoÊci wspierajàce proces transferutechnologii,
– poziom wykonawców badaƒ i innowacji, czyliszko∏y wy˝sze, przedsi´biorstwa, jednostki B+R, in-dywidualni wynalazcy.
Te wypracowane struktury mogà pobudzaç lubblokowaç transfer technologii. Wa˝ne sà relacje po-mi´dzy poszczególnymi poziomami, zapewniajàcestabilny przep∏yw Êrodków pieni´˝nych oraz wiedzy,informacji i technologii mi´dzy ró˝nymi podmio-tami, wp∏ywajàce na efektywnoÊç tworzenia nowychrozwiàzaƒ itp. Relacje te mogà byç kreowane zapomocà polityki innowacyjnej i naukowo-techno-
Systemy transferu technologii w Polsce, Irlandii,Finlandii i Niemczech
ANETA MASTERNAK-JANUSANDRZEJ KOCA¡DA

ROK WYD. LXIX � ZESZYT 1/2010 25
logicznej w paƒstwie. Rzàd przy u˝yciu dost´pnychÊrodków i metod tworzy Êcie˝ki komunikacyjne mi´-dzy poszczególnymi ogniwami systemu, a przez towarunki i mo˝liwoÊci rozwoju innowacji i nowychtechnologii. Przyk∏adem takiej ingerencji sà programynaukowo-technologiczne, mi´dzy innymi o charak-terze materialnym, skierowane do przedsi´biorstwi Êrodowiska naukowego. Programy zapewniajà re-dukowanie niepewnoÊci przy tworzeniu nowychrozwiàzaƒ i pobudzajà wspó∏prac´ ró˝nych podmio-tów w ramach transferu technologii. Ingerencjarzàdu mo˝e polegaç tak˝e na okreÊlaniu obszarównauki i techniki wa˝nych dla gospodarki, do którychma trafiaç pomoc paƒstwa i które we wszelkichdzia∏aniach majà byç traktowane priorytetowo.
OÊrodki innowacji i przedsi´biorczoÊci realizujàpolityk´ naukowà i technologicznà paƒstwa. Sà toinstytucje i podmioty wyspecjalizowane w pobu-dzaniu, rozwijaniu i komercjalizacji nowych tech-nologii. Znajdujà si´ wÊród nich zarówno agendyrzàdowe, jak i oÊrodki poÊrednio powiàzane z decy-dentami. Z oÊrodkami innowacji i przedsi´biorczoÊcikontaktujà si´ twórcy nowych technologii, poszu-kujàc tam wsparcia swoich dzia∏aƒ zwiàzanychz transferem technologii.
WÊród krajów UE na szczególnà uwag´ zas∏ugu-jà systemy transferu technologii w Irlandii, Finlandiii Niemczech. Systemy te skutecznie wspierajà me-chanizmy transferu technologii, przez co wp∏ywajàna wzrost innowacyjnoÊci i przewagi konkurencyjnejoraz przyczyniajà si´ do zajmowania przez wymie-nione paƒstwa pozycji liderów w UE pod wzgl´demró˝nych wskaêników naukowo-technologicznych.Polska, dà˝àc do zmniejszenia luki technologicznejw stosunku do paƒstw rozwini´tych, od lat wpro-wadza zmiany w systemie transferu technologii, abyjak najlepiej przystosowaç go do potrzeb gospo-darki opartej na wiedzy. Wiele z tych zmian idziew dobrym kierunku, a poznanie irlandzkich, fiƒskichi niemieckich doÊwiadczeƒ w za-kresie najlepszych rozwiàzaƒwykorzystywanych w funkcjo-nujàcych tam systemach trans-feru technologii mo˝e przyczyniçsi´ do polepszenia sytuacji wtworzeniu i wdra˝aniu nowychtechnologii.
System transferutechnologii w Irlandii
Irlandia jest krajem nastawio-nym g∏ównie na transfer tech-nologii w formie bezpoÊrednichinwestycji zagranicznych (BIZ)oraz import zagranicznej tech-nologii niematerialnej w postacipatentów, licencji, know-how itp.WartoÊç inwestycji bezpoÊrednich
w Irlandii w 2005 r. osiàgn´∏a kolosalnà sum´ 150,8mld euro [1], a wskaênik wydatków na importtechnologii niematerialnej w tym roku wyniós∏9,71% PKB [2]. Pod wzgl´dem obu wskaênikówIrlandia obj´∏a pozycj´ lidera wÊród paƒstw UE.Wszelkie dzia∏ania podejmowane w tym kraju w celubudowania systemu transferu technologii majà nauwadze utrzymanie odpowiedniego klimatu inwes-tycyjnego i zapewnienie bezpieczeƒstwa bezpo-Êrednim inwestycjom zagranicznym. W ostatnichlatach zacz´to zwracaç wi´kszà uwag´ na pozys-kiwanie technologii ze êróde∏ wewn´trznych, czegowyrazem by∏o przeznaczanie coraz wi´kszych Êrod-ków na badania. Nak∏ady na dzia∏alnoÊç badawczo--rozwojowà jako procent PKB wzros∏y w 2006 r.o oko∏o 18% w stosunku do roku 2000 [3]. Sytuacjataka znalaz∏a odbicie w dzia∏aniach zwiàzanych z wpro-wadzaniem ró˝nych form wsparcia przedsi´biorcóww dzia∏alnoÊci innowacyjnej i B+R przez istniejàceoÊrodki innowacji i przedsi´biorczoÊci. Wypracowanyirlandzki system u∏atwiajàcy transfer technologiiz zaznaczonymi g∏ównymi zale˝noÊciami pomi´dzyogniwami systemu przedstawiono na rys. 1.
W Irlandii za prowadzenie polityki naukowej i tech-nologicznej odpowiedzialny jest minister przemys∏u,handlu i zatrudnienia, któremu asystuje ministerstanu ds. nauki, technologii i innowacji. W obr´bieMinisterstwa Przemys∏u, Handlu i Zatrudnienia dzia∏aBiuro ds. Nauki i Technologii (OST), odpowiedzialneza prowadzenie, rozwój i koordynacj´ polityki nau-kowej, technologicznej i innowacyjnej. Pod przewod-nictwem ministra przemys∏u, handlu i zatrudnieniadzia∏a Mi´dzywydzia∏owy Komitet Nauki i Techniki,który ustalajàc priorytety wydatków rozdziela Êrodkina nauk´ pomi´dzy poszczególne ministerstwa.Instytucjà odpowiedzialnà za promocj´ i rozwójprzedsi´wzi´ç naukowych i technologicznych jestForfas. Organ ten dzia∏a pod nadzorem MinisterstwaPrzemys∏u, Handlu i Zatrudnienia i Êwiadczy us∏ugi
Rys. 1. System transferu technologiiw Irlandii

ROK WYD. LXIX � ZESZYT 1/201026
doradcze i informacyjne powiàzanym z nim insty-tucjom, takim jak: Enterprise Ireland, Agencja Rozwo-ju Przemys∏owego czy Irlandzka Fundacja Naukowa.Czuwa w ten sposób nad realizacjà za∏o˝eƒ, strategiii programów rzàdowych w tych instytucjach. Podzwierzchnictwem Forfas dzia∏a Irlandzka Rada ds.Nauki, Technologii i Innowacji (ICSTI), która zapew-nia porady i ekspertyzy dla rzàdu. Cz∏onkami radyjest 25 ekspertów z ró˝nych dziedzin nauki.
WÊród oÊrodków wpierajàcych transfer techno-logii w Irlandii wyró˝niajà si´ Agencja Rozwoju Prze-mys∏owego i Enterprise Ireland. Ich misjà przewod-nià jest przyciàganie bezpoÊrednich inwestycji za-granicznych do Irlandii, co udaje si´ mi´dzy innymidzi´ki dzia∏alnoÊci zagranicznych oddzia∏ów rozlo-kowanych na ca∏ym Êwiecie. Agencja Rozwoju Prze-mys∏owego zapewnia równie˝ us∏ugi doradcze i finan-sowe majàce na celu wsparcie dzia∏alnoÊci inno-wacyjnej i B+R przedsi´biorstw, równie˝ tych, którechcà ulokowaç swój biznes w Irlandii. EnterpriseIreland oferuje firmom dost´p do venture capital,a tak˝e dotacje na rozruch firmy, rozwój biznesu,dzia∏alnoÊç eksportowà, dzia∏alnoÊç B+R i inno-wacyjnà. Irlandzka Fundacja Naukowa oraz Urzàdds. Szkolnictwa Wy˝szego promujà i inspirujà bada-nia naukowe, oferujàc naukowcom i zespo∏om ba-dawczym dotacje, granty i stypendia na dzia∏alnoÊçB+R. Ze wsparcia Irlandzkiej Fundacji Naukowej mogàkorzystaç równie˝ przedsi´biorcy.
Charakterystycznymi czynnikami wp∏ywajàcymina skutecznoÊç irlandzkiego systemu transferutechnologii sà:
– stabilna polityka naukowo-technologiczna za-pewniajàca osiàganie ró˝norodnych celów wa˝nychdla gospodarki,
– spójne i wspó∏pracujàce ze sobà otoczenieinstytucjonalne posiadajàce czytelnie rozdzielone za-dania w ramach okreÊlonych obszarów,
– ogromny potencja∏ negocjacyjny w zakresieprzyciàgania zagranicznych przedsi´biorców dlawzrostu innowacyjnoÊci i poziomu technologicznegoIrlandii,
– umiej´tnoÊci w zakresie wspierania nowychprzedsi´biorców w ich dzia∏alnoÊci innowacyjneji badawczo-rozwojowej.
System transferu technologii w Finlandii
Fiƒski system innowacji i transferu technologii jestjednym z najlepiej dzia∏ajàcych na Êwiecie. JegosprawnoÊç i skutecznoÊç potwierdza fakt, ˝e Finlan-dia od lat zajmuje czo∏owe pozycje w Êwiatowychrankingach konkurencyjnoÊci i przoduje pod wzgl´-dem ró˝nych wskaêników gospodarczych i nauko-wo-technicznych. Szczególnà uwag´ zwraca si´w Finlandii na tworzenie nowoczesnych rozwiàzaƒ,które przynoszà korzyÊci gospodarce, a istotnymczynnikiem wspierajàcym to dzia∏anie jest dost´p doÊrodków finansowych na badania, rozwój i wdro˝e-nia. Kraj ten jest liderem wÊród paƒstw UE podwzgl´dem nak∏adów na dzia∏alnoÊç badawczo--rozwojowà, które w 2006 r. wynosi∏y 3,45% PKB [3].Celem oÊrodków dzia∏ajàcych w fiƒskim systemietransferu technologii jest zach´canie naukowcówi przedsi´biorców do transferu technologii, a zw∏asz-cza do podejmowania badaƒ w obszarach wa˝nychdla gospodarki fiƒskiej. Schemat systemu transferutechnologii w Finlandii pokazano na rys. 2.
Finlandia by∏a pierwszym krajem w UE, którywprowadzi∏ zasad´ koordynowania polityki nauko-wej na szczeblu wy˝szym ni˝ poszczególne mi-nisterstwa, tworzàc Fiƒskà Rad´ Nauki i Technologiipod przewodnictwem premiera. Rada posiada pod-komitet ds. polityki naukowej pod przewodnictwemministra edukacji oraz podkomitet ds. polityki tech-nologicznej pod przewodnictwem ministra handlui przemys∏u [4]. Jej zadaniem jest prowadzenie politykinaukowej i technologicznej w paƒstwie, mi´dzyinnymi przez rozdzielanie Êrodków publicznych nanauk´ i technologi´ pomi´dzy ministerstwami.
Ârodki na tworzenie i wdra˝anie nowych technolo-gii trafiajà do przedsi´biorstw, szkó∏ wy˝szych orazró˝nych instytutów badawczych mi´dzy innymiprzez instytucje, takie jak: Akademia Fiƒska (podleg∏a
ministrowi edukacji), NarodowaAgencja ds. Technologii TEKES(podleg∏a ministrowi handlu iprzemys∏u) oraz Fiƒski Funduszna rzecz Badaƒ i Rozwoju SITRA(instytucja podleg∏a parlamen-towi). Specyficznà formà wspie-rania komercjalizacji wynikówbadaƒ naukowych w dzia∏al-noÊci przemys∏owej oraz narz´-dziem integrujàcym przemys∏i nauk´ sà programy technolo-giczne prowadzone przez TEKES.Programy takie sà prowadzone
Rys. 2. System transferu technologii w Finlandii

ROK WYD. LXIX � ZESZYT 1/2010 27
wspólnie przez naukowców i przedsi´biorcóww strategicznych dla gospodarki fiƒskiej obszarach.W 2006 r. realizowane by∏y 23 programy tech-nologiczne o Êrednim bud˝ecie 16,5 mln euro. ¸àcznybud˝et programów wyniós∏ 380 mln euro, a do-finansowanie agencji kszta∏towa∏o si´ na poziomie190 mln euro [5]. Szko∏y wy˝sze i instytuty badaw-cze w Finlandii otrzymujà Êrodki pieni´˝ne na dzia-∏alnoÊç B+R w postaci grantów i dotacji od AkademiiFiƒskiej. W 2007 r. kwota finansowania wynios∏a260 mln euro [6]. Wspieraniem nowo powsta∏ychi rozwijajàcych si´ firm poprzez us∏ugi finansowe,doradcze i szkoleniowe zajmuje si´ instytucja SITRA,która w 2007 r. przeznaczy∏a na finansowanie prog-ramów w obszarach priorytetowych 5,7 mln euro,a na fundusz venture capital 15,7 mln euro [7]. Opróczwymienionych instytucji w Finlandii dzia∏a wieleinnych oÊrodków innowacji i transferu technologii,które zapewniajà wsparcie w procesie tworzeniai komercjalizacji wynalazków, jak np. Fundacja ds.Fiƒskiej WynalazczoÊci, Fiƒskie Inwestycje Przemys∏u(FII) czy Fiƒski Fundusz Ârodowiska Pracy.
Charakterystycznymi czynnikami wp∏ywajàcymina skutecznoÊç fiƒskiego systemu transferu tech-nologii sà:
– istnienie spójnego otoczenia instytucjonalnegoposiadajàcego czytelne misje i okreÊlone obszarydzia∏ania, a jednoczeÊnie wspó∏pracujàcego ze sobà,
– istnienie sieci wspó∏pracy mi´dzy instytutamibadawczymi i szko∏ami wy˝szymi a przedsi´bior-stwami (przedsi´biorstwa przeznaczajà Êrodki naprace badawcze tam prowadzone),
– prowadzenie badaƒ przydatnych dla gospodar-ki i istnienie skutecznego systemu komercjalizacjinowych technologii (innowacyjne koncepcje sàzawsze wykorzystywane w przedsi´biorstwach).
System transferu technologii w Niemczech
Niemiecki system wspierania innowacji i transferutechnologii jest jednym z najbardziej rozbudowanychsystemów w UE. Jego dzia∏ania skierowane sà nainicjowanie i wspieranie badaƒ naukowych dlazaspokajania potrzeb przemys∏u. Niemcy nale˝à doczo∏ówki paƒstw w UE w zakresie przeznaczanianak∏adów na B+R – w 2006 r. nak∏ady na B+R wy-nios∏y 2,51% PKB [3]. Wysokie nak∏ady na badaniai istnienie du˝ej liczby instytucji tworzàcych nowerozwiàzania znajdujà odzwierciedlenie w du˝ej liczbiewynalazków i patentów. Niemcy sà liderem w UE podwzgl´dem liczby zg∏aszanych patentów – w 2006 r.wskaênik wynalazków zg∏oszonych w NiemieckimUrz´dzie Patentowym na 1 mln mieszkaƒców wy-niós∏ 735 [8], a wskaênik wynalazków zg∏oszonych doEuropejskiego Urz´du Patentowego na 1 mln miesz-kaƒców osiàgnà∏ wartoÊç 302 [9, 10]. Dla porówna-nia: w Finlandii, która równie˝ przeznacza wysokienak∏ady na badania, w 2005 r. wskaênik wynalaz-ków zg∏oszonych do Fiƒskiego Urz´du Patentowegona 1 mln mieszkaƒców wyniós∏ 394 [11], a w 2006 r.wskaênik wynalazków zg∏oszonych do EuropejskiegoUrz´du Patentowego na 1 mln mieszkaƒców – 319[9 – 10]. Schemat systemu transferu technologiiw Niemczech pokazano na rys. 3.
OdpowiedzialnoÊç za wzmacnianie postaw przed-si´biorczych i innowacyjnych, wspieranie transferu
wiedzy i technologii, inicjowanie badaƒ naukowychjest rozdzielona w Niemczech pomi´dzy dwa poziomyrzàdowe: federalny i rejonowy, a w szczególnoÊcipomi´dzy dwa ministerstwa: Ministerstwo Federalneds. Kszta∏cenia i Badaƒ (BMBF) oraz MinisterstwoFederalne ds. Gospodarki i Technologii (BMWi) [12].Organem ∏àczàcym dwa poziomy rzàdowe w zakre-sie tworzenia polityki naukowej jest instytucja o naz-wie Wspólna Konferencja Naukowa (GWK). Jej cz∏on-kami sà minister federalny ds. kszta∏cenia i badaƒ,federalny minister finansów oraz ministrowie po-szczególnych landów. Instytucja ta rozdziela Êrodkina badania naukowe w ramach wprowadzanychprogramów mi´dzy takie oÊrodki, jak: NiemieckaWspólnota ds. Badaƒ (DFG), Instytuty Maksa Plancka(MPG), Instytuty Fraunhofera (FhG), StowarzyszeniaHelmholtza (HGF), Instytuty Leibniza (WGL), GrupaRobocza Przemys∏owego Zwiàzku Badawczego „Ottovon Guericke” AiF. Zadaniem powy˝szych oÊrodkówjest uruchamianie i koordynowanie wprowadzanychprzez ministerstwa programów w szko∏ach wy˝szych,instytutach badawczych i przedsi´biorstwach. Zapolityk´ technologicznà w Niemczech odpowiedzialnejest Ministerstwo Federalne ds. Gospodarki i Tech-nologii, które wykonuje swoje za∏o˝enia równie˝w ramach uruchamianych programów, a ich realizacjàzajmujà si´ ró˝ne oÊrodki innowacji i TT.
Niemiecka Wspólnota ds. Badaƒ wspiera i inicjujebadania wy∏àcznie w szko∏ach wy˝szych i instytu-tach badawczych. Wspieraniem dzia∏alnoÊci inno-wacyjnej i B+R przedsi´biorstw zajmuje si´ GrupaRobocza Przemys∏owego Zwiàzku Badawczego „Ottovon Guericke” AiF. Prowadzone przez AiF programymajà przyczyniaç si´ do zwi´kszania wspó∏pracymi´dzy naukà a przemys∏em oraz do podnoszenia po-ziomu innowacyjnoÊci, zw∏aszcza wÊród MSP. G∏ów-nym celem dzia∏alnoÊci Instytutów Maksa Plancka,Instytutów Fraunhofera, Stowarzyszeƒ Helmholtzaoraz Instytutów Leibniza jest prowadzenie dzia∏alnoÊciB+R. Instytuty Maksa Plancka stanowiace grup´76 instytutów cz∏onkowskich zajmujà si´ g∏ównie pro-wadzeniem badaƒ podstawowych, zw∏aszcza z dzie-dziny nauk socjologicznych, humanistycznych i ogól-nych oraz prowadzeniem badaƒ uzupe∏niajàcychprace wykonywane w szko∏ach wy˝szych. InstytutyFraunhofera liczàce 57 instytutów cz∏onkowskichskupiajà swoje dzia∏ania na prowadzeniu badaƒ no-watorskich i u˝ytecznych dla przemys∏u i dla spo-∏eczeƒstwa. Âwiadczà przedsi´biorcom równie˝ wieledodatkowych us∏ug, jak np.: ocena u˝ytecznoÊciwynalazku i mo˝liwoÊci patentowych, ocena handlo-wego potencja∏u skutków prowadzenia badaƒ, two-rzenie strategii komercjalizacji wynalazku, pomocw wyszukiwaniu partnerów gospodarczych. Stowa-rzyszenia Helmholtza sk∏adajàce si´ z 16 centrównaukowych prowadzà prace badawcze w szeÊciukluczowych obszarach naukowych: energia, ziemiai Êrodowisko, zdrowie, kluczowe technologie, struk-tura materii, transport i przestrzeƒ. Stowarzyszeniaudzielajà szczególnego wsparcia m∏odym naukow-com, rekomendujàc ich do pracy w przemyÊle, po-magajàc w zdobyciu sta˝y, w planowaniu Êcie˝ekkariery. Instytuty Leibniza stanowiàce sieç 86 in-stytutów prowadzà prace badawcze w szerokimzakresie dziedzin: od ekonomii, przez socjologi´, naukiogólne do nauk in˝ynierskich i Êrodowiskowych.

ROK WYD. LXIX � ZESZYT 1/201028
Charakterystycznym czynnikiem wp∏ywajàcym naskutecznoÊç niemieckiego systemu transferu tech-nologii jest ogromna wiedza ekspercka zgromadzonaw licznych instytutach federalnych i rejonowychowocujàca tworzeniem i wdra˝aniem technologii.Natomiast s∏aboÊcià prezentowanego systemu jeststopieƒ jego skomplikowania i rozdrobnienia wy-nikajàcy przede wszystkim z ustroju politycznego. Zapolityk´ innowacyjnà odpowiedzialne sà tu tak na-prawd´ dwa ministerstwa: BMBF i BMWi, co mo˝eograniczaç mo˝liwoÊci stworzenia w pe∏ni zintegro-wanej polityki innowacyjnej. Ponadto muszà istnieçinstytucje, których zadaniem jest koordynowaniedzia∏aƒ realizowanych na szczeblu federalnym i zwiàz-kowym (obecna GWK) [13].
System transferu technologii w Polsce
W polskim systemie transferu technologii od latdokonujà si´ zmiany majàce na celu dopasowanietego systemu do potrzeb gospodarki opartej na wie-dzy. W porównaniu z Irlandià, Finlandià i NiemcamiPolska jest mniej rozwini´ta zarówno pod wzgl´-dem gospodarczym, jak i pod wzgl´dem stosowaniai tworzenia nowych technologii. Mimo coraz pow-szechniejszej ÊwiadomoÊci dotyczàcej koniecznoÊcizwi´kszania nak∏adów paƒstwa i prywatnych przed-si´biorców na prace B+R, nak∏ady te sà nadal bardzoniskie – w 2006 r. wynosi∏y zaledwie 0,56% PKB [3].Znajduje to wyraz w niskiej liczbie wynalazkówi patentów – w 2006 r. wskaênik wynalazków zg∏o-szonych do Urz´du Patentowego na 1 mln miesz-kaƒców przyjà∏ wartoÊç 57 [14], przez co by∏ a˝ 13 razymniejszy ni˝ w Niemczech. W obliczu braku w∏as-
nych Êrodków na badania, dzia∏ania systemu trans-feru technologii w Polsce nakierowane sà g∏ównie napozyskiwanie Êrodków unijnych na dzia∏alnoÊç in-nowacyjnà i B+R. Obecny system transferu tech-nologii przedstawiono na rys. 4.
W ramach lepszego zarzàdzania naukà i technolo-già ju˝ przed 2005 r. przekszta∏cono Komitet BadaƒNaukowych w Rad´ Nauki dzia∏ajàcà przy Minister-stwie Nauki i Szkolnictwa Wy˝szego. Rada Nauki pe∏nirol´ organu opiniodawczo-doradczego, sporzàdza-jàc oceny i projekty dzia∏aƒ dotyczàce polityki nau-kowej i naukowo-technicznej paƒstwa. Organami radysà: Komitet Polityki Naukowej i Naukowo-Technicznej,Komisja Badaƒ na rzecz Rozwoju Nauki, KomisjaBadaƒ na rzecz Rozwoju Gospodarki. MNiSW roz-dziela Êrodki na nauk´ pomi´dzy szko∏y wy˝sze,jednostki badawczo-rozwojowe, placówki naukowePolskiej Akademii Nauk (PAN). W 2005 r. utworzonoMinisterstwo Rozwoju Regionalnego (MRR), któregozadaniem jest monitorowanie maksymalnego wy-korzystania Êrodków przyznanych Polsce przez UE.Politykà gospodarczà i innowacyjnà zajmuje si´Ministerstwo Gospodarki (MG), tworzàc np. strategiei programy dla rozwoju polskiego przemys∏u.
Dobrym kierunkiem realizowania polityki nau-kowej i technologicznej w Polsce jest powo∏aniew 2007 r. Narodowego Centrum Badaƒ i Rozwoju(NCBiR) nadzorowanego przez ministra nauki i szkol-nictwa wy˝szego. Centrum ma realizowaç strategicz-ne programy badaƒ naukowych i prac rozwojowych,a w szczególnoÊci: og∏aszaç konkursy na wykonanie,oceniaç i wybieraç oferty, nadzorowaç realizacj´i rozliczaç z wykonanego zadania. Obecnie Centrumrealizuje kilka programów krajowych i mi´dzyna-
Rys. 3. System transferu technologii w Niemczech

ROK WYD. LXIX � ZESZYT 1/2010 29
rodowych, jak np. „Inicjatywa Technologiczna I”,którego celem jest dofinansowanie projektów ba-dawczych, celowych oraz prac przygotowawczychdo wdro˝enia, lub np. „Program Wspólny AAL” na-kierowany na stymulowanie generowania innowa-cyjnych produktów, us∏ug i systemów bazujàcychna technologii informacyjno-komunikacyjnej (ICT).
WÊród oÊrodków innowacji i TT zdecydowaniewyró˝nia si´ PARP – rzàdowa agencja podlegajàcaministrowi gospodarki. PARP zajmuje si´ wdra˝aniemprogramów rozwoju gospodarki realizowanych przezministerstwa, np. program „Innowacyjna Gospo-darka” realizowany przez Ministerstwo RozwojuRegionalnego (MRR) przy wspó∏udziale MG i MNiSWczy te˝ „Program Operacyjny Rozwój Polski Wschod-niej” realizowany przez MRR. Nale˝y zaznaczyç, ˝ewprowadzane w Polsce programy sà finansowaneg∏ównie ze Êrodków unijnych, przy wspó∏udzialewk∏adu w∏asnego. Pozosta∏e dzia∏ania majàce na celuwspieranie transferu technologii realizowane przezPARP to mi´dzy innymi:
– Êwiadczenie us∏ug doradczych, eksperckich,szkoleniowych w zakresie innowacji i transferu tech-nologii,
– gromadzenie i udost´pnianie przedsi´biorcomwiedzy, raportów, analiz, informacji gospodarczych,
– wspieranie inicjatyw rozwoju infrastruktury TT(np. opracowywanie studiów wykonalnoÊci i biznes-planów),
– prowadzenie dzia∏aƒ zmierzajàcych do rozwojui wzmacniania zwiàzków kooperacyjnych mi´dzyró˝nymi instytucjami przedsi´biorczoÊci i innowa-cji poprzez np. koordynowanie dzia∏alnoÊci Krajo-wego Systemu Us∏ug dla Ma∏ych i Ârednich Przed-si´biorstw (KSU).
WÊród pozosta∏ych oÊrodków innowacji i transferutechnologii mo˝na wyró˝niç instytucje takie jak:
� Agencja Rozwoju Przemys∏u (ARP), wÊród dzia∏aƒktórej mo˝na wymieniç inicjowanie tworzenia par-
ków przemys∏owych i technologicznych opartych namajàtku restrukturyzowanych przedsi´biorstw orazpomoc w wyszukiwaniu partnerów gospodarczych,
� Naczelna Organizacja Techniczna (NOT), Êwiad-czàca us∏ugi w zakresie ekspertyz i opinii technicz-nych, prac projektowych, doradztwa technicznego,realizacji prac wdro˝eniowych, a tak˝e prowadzà-ca szkolenia dla kadry technicznej i mened˝erskieji organizujàca sta˝e zagraniczne dla m∏odej kadry zagranicà,
� Krajowa Izba Gospodarcza (KIG), g∏ównieprowadzàca dzia∏alnoÊç szkoleniowà i doradczà wzakresie promocji i wdra˝ania innowacji w firmach,
� Fundacja na rzecz Nauki Polskiej (FNP), zajmu-jàca si´ wspieraniem dzia∏alnoÊci naukowców i zes-po∏ów badawczych poprzez system nagród i sty-pendiów, wspieraniem dzia∏aƒ umo˝liwiajàcychwdra˝anie osiàgni´ç naukowych do praktyki gos-podarczej m.in. przez przyznawanie subwencji nawdro˝enia,
� Stowarzyszenie Organizatorów OÊrodków Inno-wacji i Przedsi´biorczoÊci (SOOIP), które prowadzidzia∏alnoÊç szkoleniowà i doradczà w zakresie przed-si´biorczoÊci, innowacji i transferu technologii, a tak-˝e zajmuje si´ popularyzacjà wiedzy i osiàgni´ç nau-kowych przez organizowanie szkoleƒ i konferencji,
� Polska Agencja Informacji i Inwestycji Zagra-nicznych, której celem jest dzia∏alnoÊç informacyjnai promowanie Polski w celu przyciàgni´cia inwes-torów zagranicznych.
Wykonawcami badaƒ w Polsce sà: szko∏y wy˝sze,jednostki badawczo-rozwojowe (jbr-y), jednostki PANoraz przedsi´biorstwa. Faktem jest, ˝e przedsi´-biorstwa zajmujà si´ dzia∏alnoÊcià B+R w bardzoograniczonym zakresie – w 2006 r. tylko 32% firmprzeznacza∏o Êrodki finansowe na B+R [15]. Dlaporównania w 2006 r.: w Irlandii wÊród wykonaw-ców badaƒ przedsi´biorstwa stanowi∏y 67% [16],w Finlandii – 71% [17], a w Niemczech w 2005 r. – 69%
Rys. 4. System transferu technologii w Polsce

ROK WYD. LXIX � ZESZYT 1/201030
[18]. Poza tym nak∏ady na B+R przedsi´biorstww Polsce sà bardzo niskie – w 2005 r. stanowi∏y za-ledwie 0,18% PKB [19].
PAN jest paƒstwowà instytucjà naukowà, któradzia∏a w kierunku rozwoju i promocji nauki, a nad-zór nad nià sprawuje Prezes Rady Ministrów. Pla-cówkami naukowymi akademii sà instytuty, zak∏a-dy, centra, stacje badawcze i inne jednostki prowa-dzàce badania naukowe i prace badawczo-rozwojowe.W swojej dzia∏alnoÊci PAN wspó∏dzia∏a ze szko∏amiwy˝szymi i ró˝nymi instytucjami naukowymi. Jed-nostki badawczo-rozwojowe sà placówkami paƒ-stwowymi, ale posiadajà równie˝ status przedsi´-biorcy, tzn. prowadzàc badania naukowe, kierujà si´tak˝e potrzebà zysku. Jbr-y w wi´kszoÊci sà pod-porzàdkowane organizacyjnie Ministerstwu Gospo-darki. Sektor jbr w 2008 r. stanowi∏ 162 jednostki [20]o zró˝nicowanym potencjale naukowym i ekono-micznym. Badania w instytutach w oko∏o 20-30% sàfinansowane z bud˝etu paƒstwa.
W zwiàzku z tym, ˝e Polska jest krajem o s∏abympotencjale technologicznym i naukowym, i co si´z tym wià˝e – niewielkich dokonaniach w sferzenaukowo-technologicznej, trudno tu mówiç o czyn-nikach, które wp∏ywajà na skutecznoÊç prezento-wanego wy˝ej systemu TT. Natomiast jednà z jegos∏aboÊci jest izolowanie istniejàcych jednostekbadawczych od zak∏adów przemys∏owych (prezen-tuje to pionowa kreska mi´dzy przedsi´biorstwamia jednostkami naukowymi na rys. 4). Wspó∏prac´utrudnia brak mechanizmów proinnowacyjnych. Pozatym polskie oÊrodki innowacji i TT nie sà ze sobàÊciÊle powiàzane, tak jak to ma miejsce w systemiefiƒskim, gdzie ró˝ne instytucje podejmujà wspólneprojekty i wspó∏pracujà ze sobà. W celu zmianyistniejàcego stanu rzeczy niezb´dne sà dalsze reformysystemu transferu technologii.
Podsumowanie
Przedstawione systemy transferu technologiiw Irlandii, Finlandii, Niemczech i Polsce wykazujàpodobieƒstwa w zakresie podzia∏u na trzy poziomystruktur organizacyjnych, czyli mo˝na tam wyodr´b-niç poziom decydentów, poziom wsparcia i poziomwykonawców badaƒ. Ró˝nice wynikajà natomiastz realizowanych przez nie celów, które polegajà nawspieraniu dominujàcych mechanizmów transferutechnologii.
W Irlandii dominujàcymi mechanizmami TT sà:bezpoÊrednie inwestycje zagraniczne oraz importzagranicznej technologii. Wydaje si´, ˝e dzia∏ajàcytam system TT wspomaga te mechanizmy przezodpowiednie posuni´cia polityki rzàdowej, np. niskipodatek od zysków, czy te˝ dzia∏alnoÊç krajowychinstytucji pilnujàcych bezpieczeƒstwa inwestycjii wspierajàcych rodzimà dzia∏alnoÊç naukowà.
W Finlandii dominujàcym mechanizmem, za po-mocà którego dokonuje si´ transfer technologii, jestprzede wszystkim realizacja B+R w ramach prog-ramów badawczych. System TT w tym kraju bardzoskutecznie wspiera ten mechanizm przez polityk´rzàdowà, w ramach której przeznacza si´ ogromneÊrodki finansowe na badania, oraz przez instytucje TT,które sprawnie rozdysponowujà te Êrodki i jednoczàÊrodowisko naukowców i przedsi´biorców.
G∏ównymi sposobami transferu technologiiw Niemczech sà: realizacja prac B+R, a w ostatnichlatach wspieranie przedsi´wzi´ç innowacyjnychw ma∏ych i Êrednich przedsi´biorstwach. Mimopewnych niedoskona∏oÊci prezentowanego niemiec-kiego systemu TT (przedstawionych wy˝ej) wydajesi´, ˝e na tyle dobrze wspiera on te mechanizmy, ˝ewp∏ywa to na dobre wyniki osiàgane przez Niemcyw ró˝nych wskaênikach gospodarczych i naukowo--technicznych.
W Polsce brak jest sprawdzonych mechanizmówTT, trudno te˝ wyodr´bniç mechanizmy dominujàce.Obecnie g∏ównym celem wypracowanego systemutransferu technologii jest zdobywanie Êrodkówunijnych na rozwój gospodarczy i rozdyspono-wywanie tych Êrodków na ca∏y kraj w ramachwdra˝anych programów. Programy te dotyczà tak˝ewspierania innowacyjnoÊci i przedsi´biorczoÊciw firmach – w przysz∏oÊci nale˝y wi´c spodziewaçsi´ pewnych rezultatów.
W systemach transferu technologii w Irlandii, Fin-landii i Niemczech istniejà instytucje, które inicjujà,wspierajà i finansujà dzia∏alnoÊç naukowà w szko-∏ach wy˝szych, czyli Akademia Fiƒska, Irlandzki Urzàdds. Szkolnictwa Wy˝szego, Niemiecka Wspólnotads. Badaƒ. Instytucje te decydujà o alokacji Êrodkówfinansowych w ró˝nych obszarach badawczychw ramach programów badawczych dla szkó∏ wy˝-szych, inicjujà wspó∏prac´ szkó∏ wy˝szych przezkooperacj´ naukowców i tworzenie zespo∏ów ba-dawczych pracujàcych nad nowymi technologiami,zajmujà si´ zacieÊnianiem zwiàzków mi´dzy naukàa gospodarkà. W polskim systemie transferu tech-nologii brak jest podobnej instytucji. W sytuacji, kiedyzwiàzki mi´dzy naukowcami a przedsi´biorcami sàw Polsce bardzo s∏abe, jej istnienie by∏oby bardzopo˝àdane.
Specyficznà instytucjà wyst´pujàcà w irlandzkimsystemie transferu technologii jest Agencja RozwojuPrzemys∏owego, która przyciàga do Irlandii bezpo-Êrednie inwestycje zagraniczne. Wiadomo, ˝e transfertechnologii w postaci bezpoÊrednich inwestycjizagranicznych mo˝e stymulowaç rozwój gospodar-czy, dzi´ki temu, ˝e wià˝e si´ z przep∏ywem kapita∏u,nowoczesnych technik produkcyjnych, metod orga-nizacyjnych i know-how. W sytuacji Polski, która nietworzy nowoczesnych rozwiàzaƒ technologicznychwe w∏asnym zapleczu B+R, BIZ mog∏yby wprowa-dziç takie technologie do kraju. Dlatego wydaje si´potrzebne utworzenie specjalnej instytucji, którasprowadza∏aby inwestorów do Polski. W tym celunale˝y zezwoliç na wi´kszà niezale˝noÊç ju˝ istnie-jàcej Agencji Informacji i Inwestycji Zagranicznych,tak aby mia∏a ona mo˝liwoÊç podejmowania wobecinwestorów pewnych zobowiàzaƒ w imieniu rzàdu.Obecnie agencja prowadzi g∏ównie dzia∏alnoÊçinformacyjnà.
LITERATURA1. http://www.mg.gov.pl/2. http://oberon.sourceoecd.org/vl=2664213/cl=37/nw=1/
rpsv/sti2007/gh11-4.htm, „Technology balance of payments,2005”
3. http://epp.eurostat.ec.europa.eu/, „Gross domestic expen-diture on R&D (GERD)”
4. http://www.research.fi, „Research in Finland”, str. 45. http://www.tekes.fi/annual_review06/page22.asp, „Annual
Review 2006”

ROK WYD. LXIX � ZESZYT 1/2010 31
6. http://www.aka.fi7. http://www.sitra.fi, „Annual Report 2007”, Sitra, str. 598. www.dpma.de, „Jahresbericht 2006”, Deutsches Patent-
und Markenamt, str. 99. www.epo.org, „European applications filed in 2005”10. www.epp.eurostat.ec.europa.eu, „Total population”11. http://www.stat.fi/til/pat/index_en.html12. http://www.bmbf.de, „Administrative Structure of Govern-
ment-funded Science and Technology (R&D) in Germany”13. http://globaleconomy.pl/content/view/2424/21/, M. Kolka,
„Stan i perspektywy innowacyjnoÊci w Unii Europejskiej”14. „Nauka i technika w 2005”, GUS, Warszawa 2006, str. 20015. „Rocznik statystyczny województw 2007”, GUS, Warszawa
2007, str. 586
16. „Research and Development Statistics in Ireland 2006 – ata glance”, Forfas 2007, str. 12
17. http://www.research.fi/en/resources/R_D_expenditure/R_D_expenditure_table
18. „Forschung und Innovation in Deutschland 2007”, Bundes-ministerium für Bildung und Forschung, Bonn-Berlin 2007,str. 12
19. http://epp.eurostat.ec.europa.eu, „R&D expenditure andpersonnel”, Statistics in focus 23/2007, str. 2
20. http://148.81.190.219/e107/prezentacje/rafalski.htm, L. Ra-falski „Jednostki badawczo-rozwojowe w 2008 r.”, pre-zentacja w ramach konferencji „Nowe finansowanie.Wi´ksza dost´pnoÊç. Lepsza jakoÊç”, Warszawa, 25 stycznia2008 r.
Dr Maciej T. Trojnacki jest pracownikiem Przemys∏owegoInstytutu Automatyki i Pomiarów w Warszawie.
Wykaz wa˝niejszych oznaczeƒl – d∏ugoÊç kroku,h – wysokoÊç podniesienia nogi,H – wysokoÊç podniesienia korpusu robota,l0 – przesuni´cie osi obrotu stopy wzgl´dem osi obro-tu nogi w pozycji poczàtkowej,xBj, yBj – wspó∏rz´dne punktów Bj w uk∏adzie Rxyzkorpusu,α, β, γ – kàty: przechylenia, pochylenia i obrotu kor-pusu robota wzgl´dem nieruchomego uk∏adu od-niesienia OXYZ,θij – kàt przegubowy zwiàzany z obrotem i-tego cz∏onuj-tej nogi,uRC – pr´dkoÊç ustalonego ruchu post´powego kor-pusu robota do przodu lub ty∏u,γC – maksymalna pr´dkoÊç kàtowa, z jakà obraca si´korpus robota,ui.j – sygna∏ sterujàcy serwomechanizmem realizu-jàcym obrót i-tego cz∏onu j-tej nogi,sj – sygna∏y ze styczników zamontowanych w stopachrobota.
Badania symulacyjne ruchu robotów pozwalajàw pierwszym przybli˝eniu zweryfikowaç popraw-noÊç przyj´tych metod syntezy ruchu. Wyniki takichbadaƒ dla robotów czterono˝nych mo˝na odnaleêçw wi´kszoÊci prac zwiàzanych z syntezà ich ruchu,m.in. [1 – 15]. Z kolei animacja ruchu robota umo˝li-wia wizualnà analiz´ poprawnoÊci realizacji ruchu,co ze wzgl´du na ograniczonà wyobraêni´ przestrzen-nà cz∏owieka u∏atwia wychwycenie ewentualnychb∏´dów w syntezie ruchu oraz stanowi uzupe∏nieniebadaƒ symulacyjnych. Wyniki badaƒ symulacyjnychpoparte animacjami ruchu mo˝na odnaleêç m.in.w pracach [10, 13, 14]. Realizacja badaƒ ekspery-mentalnych pozwala na ostatecznà weryfikacj´ przy-j´tych rozwiàzaƒ. W szczególnoÊci badania ekspe-rymentalne pozwalajà na wychwycenie trudnych dozamodelowania zjawisk fizycznych, np. zwiàzanychz tarciem. Takimi badaniami poparte sà np. prace
[3, 6, 7, 10 – 13, 16, 17, 19]. W niektórych pracach,jak [11, 16, 18, 19] autorzy pomijajà etap badaƒsymulacyjnych, realizujàc od razu badania ekspery-mentalne. Najbardziej kompleksowym podejÊciemw syntezie ruchu robotów czterono˝nych jest reali-zacja zarówno badaƒ symulacyjnych popartychanimacjami ruchu, jak i badaƒ eksperymentalnych.Badania symulacyjne dostarczajà wprawdzie mniejwiarygodne wyniki w porównaniu z badaniami ekspe-rymentalnymi, jednak˝e umo˝liwiajà analiz´ wi´k-szej liczby parametrów, minimalizujàc koszty w przy-padku koniecznoÊci modyfikacji algorytmu ruchurobota. Omawiane kompleksowe podejÊcie do syn-tezy ruchu robotów czterono˝nych mo˝na znaleêçnp. w pracach [12, 17]. ¸agodne przejÊcie pomi´dzyrealizacjà badaƒ symulacyjnych i eksperymental-nych mo˝na uzyskaç, stosujàc metod´ szybkiegoprototypowania zaprojektowanych algorytmów ru-chu. Idea takiej metody polega na tym, ˝e badaniasymulacyjne i eksperymentalne realizuje si´ w po-dobnym Êrodowisku, a zamiast docelowego kon-trolera robota wykorzystuje si´ do realizacji badaƒeksperymentalnych karty kontrolno-pomiarowe.
Publikacja stanowi kontynuacj´ artyku∏u pt.: „Syn-teza ruchu robota czterono˝nego o strukturze ssaka”[20]. W pracy [20] dokonano przeglàdu metod syn-tezy ruchu robotów kroczàcych ze szczególnymuwzgl´dnieniem robotów czterono˝nych oraz przed-stawiono metod´ syntezy ruchu robota czterono˝-nego o strukturze ssaka. Omówiono w niej struktur´kinematycznà robota i pokazano jego model kon-strukcji. Opisano sposób syntezy elementarnych ru-chów robota, takich jak ruch pod∏u˝ny i ruch obro-towy. Podano rozwiàzanie zadania odwrotnego kine-matyki dla nóg robota, umo˝liwiajàce wyznaczeniekàtów przegubowych. Syntez´ ruchu robota zreali-zowano z uwzgl´dnieniem po∏o˝enia jego Êrodkamasy i punktu zerowego momentu.
W niniejszej pracy zamieszczono wyniki badaƒsymulacyjnych ruchu robota w pakiecie Matlab/Simulink, bazujàc na wczeÊniej opracowanej metodzieruchu [20], oraz omówiono sposób realizacji anima-
Badania symulacyjne i szybkie prototypowanie ruchurobota czterono˝nego o strukturze ssaka
MACIEJ T. TROJNACKI
.

ROK WYD. LXIX � ZESZYT 1/201032
.
.
. ..
cji jego ruchu z zastosowaniem przybornika VirtualReality. Opisano Êrodowisko badaƒ eksperymen-talnych oraz zamieszczono wyniki szybkiego pro-totypowania ruchu robota z zastosowaniem przy-bornika Real Time Windows Target pakietu Matlabi karty kontrolno-pomiarowej Advantech PCI 1710.Wykonane badania eksperymentalne zweryfikowa∏ypoprawnoÊç proponowanych metod syntezy ruchurobota.
Badania symulacyjne
� Ârodowisko badaƒ symulacyjnychW badaniach symulacyjnych ruch robota zada-
wany by∏ przy u˝yciu d˝ojstika, z wykorzystaniemaktualnego stanu 4 osi analogowych i 12 przycisków.Dla wszystkich zadawanych za pomocà osi ana-logowych d˝ojstika sygna∏ów wprowadzono stref´nieczu∏oÊci w celu wyeliminowania przypadkowegowychylenia d˝ojstika i jego skr´cenia. Sygna∏y te by∏ytak˝e filtrowane za pomocà filtru inercyjnego pierw-szego rz´du w celu wyeliminowana zbyt szybkichi przypadkowych zmian tych sygna∏ów. Wychyleniepod∏u˝ne dêwigni d˝ojstika lU powodowa∏o ruchpod∏u˝ny korpusu robota, boczne lV – ruch boczny,skr´cenie lR – ruch obrotowy, natomiast równoczesnewychylenie pod∏u˝ne i skr´cenie dêwigni d˝ojstika– zakr´canie.
Ustawienie przepustnicy lP determinuje pr´dkoÊçruchu ustalonego robota:
pRC = (–lP + 100)/5000, m/s (1)
Pr´dkoÊci decydujàce o ruchu robota sà okreÊlanew funkcji tej pr´dkoÊci. Mianowicie, pr´dkoÊç usta-lonego ruchu pod∏u˝nego uRC jest okreÊlana z za-le˝noÊci:
uRC = pRC sgn(–lU), m/s (2)
maksymalna pr´dkoÊç kàtowa obrotu w∏asnegokorpusu robota γC jako:
γC = 250 sgn(–lR)pRC π/180, rad/s (3)
a maksymalna pr´dkoÊç ruchu bocznego vRC z rów-nania:
vRC = pRC sgn(–lV), m/s (4)
Promieƒ zakr´tu robota jest okreÊlany na podstawiewielkoÊci skr´cenia dêwigni d˝ojstika lR z zale˝noÊci:
R = lR/50 + 2,5 sgn(–lR), m (5)
G∏ówna p´tla programu realizowana by∏a codt = 0,02 s, czyli co przyj´ty krok dyskretyzacji. TakawartoÊç kroku dyskretyzacji wynika z faktu, ˝e tylesamo wynosi okres PWM sterowania standardowymiserwomechanizmami.
Wszystkie przyciski d˝ojstika by∏y sprawdzanew p´tli g∏ównej co a · dt. W p´tli tej, w zale˝noÊci odstanu przycisków, sterowane wielkoÊci by∏y zwi´k-szane lub zmniejszane o zadane wartoÊci jednost-kowe. WielkoÊci, które mog∏y byç zmieniane za po-mocà przycisków, to: H, l, h i r, gdzie: H – wysokoÊçpodniesienia korpusu robota, l – d∏ugoÊç kroku– domyÊlnie l = lmax = 0,06 m, h – wysokoÊç kroku
– domyÊlnie h = 0,03 m, r – po∏owa rozstawu stóprobota – domyÊlnie r = d / 2 = 0,05 m.
Oprogramowanie generujàce ruch robota zosta∏opomyÊlane w taki sposób, aby by∏o mo˝liwe zarów-no wykorzystanie go w badaniach symulacyjnychz zastosowaniem pakietu Matlab/Simulink, jak i narzeczywistym sterowniku robota. Ca∏oÊç oprogra-mowania zosta∏a napisana w j´zyku C. Na tej pod-stawie zosta∏a stworzona s-funkcja programu Matlab,która spe∏nia∏a funkcj´ wirtualnego sterownika ro-bota. Zadaniem oprogramowania by∏o ostateczniewyznaczanie wartoÊci PWM do sterowania serwo-mechanizmami na podstawie sygna∏ów pochodzà-cych z d˝ojstika. WielkoÊci sterowaƒ serwomecha-nizmów by∏y wykorzystywane w badaniach ekspe-rymentalnych robota metodà szybkiego prototy-powania, tj. bez u˝ycia sterownika robota, a jedyniez zastosowaniem sterownika serwomechanizmówi karty kontrolno-pomiarowej dzia∏ajàcej pod kontrolàpakietu Matlab/Simulink.
Schemat dzia∏ania oprogramowania w wersjisymulacyjnej by∏ nast´pujàcy:
1. Odczyt sygna∏ów sterujàcych ruchem robotaz d˝ojstika,
2. Wybór rodzaju i etapu ruchu na podstawiedotychczasowego ruchu i sygna∏ów pochodzàcychz d˝ojstika,
3. Obliczenie pr´dkoÊci zwiàzanych z wybranymruchem,
4. Synteza ruchu punktów R i Bj [20] (dla ruchuobrotowego i zakr´cania dodatkowo obrót γ) w uk∏a-dzie nieruchomym OXYZ,
5. Transformacja wspó∏rz´dnych punktów Bj douk∏adu Rxyz zwiàzanego z korpusem robota,
6. Rozwiàzanie zadania odwrotnego kinematyki– okreÊlenie kàtów θi,j,
7. Obliczenie pr´dkoÊci i przyspieszeƒ kàtowychw przegubach robota (θi,j, θi,j),
8. OkreÊlenie wspó∏rz´dnych Êrodka masy robotaxCG, yCG, zCG w uk∏adzie zwiàzanym z korpusem robota,
9. Wyznaczenie sk∏adowych si∏ dzia∏ajàcych naÊrodek masy robota Gx, Gy, Gz w uk∏adzie zwiàzanymz korpusem robota,
10.OkreÊlenie teoretycznego po∏o˝enia punktuzerowego momentu – xZMP, yZMP, zZMP w uk∏adzie zwià-zanym z korpusem robota,
11.Wyznaczenie sterowaƒ serwomechanizmów ui.j,12.Wizualizacja wyników i animacja ruchu robota.W niniejszej pracy prezentowane sà wyniki badaƒ
symulacyjnych dla ruchu robota do przodu i jegoobrotu w lewo.
� Animacja ruchu robotaRównolegle z symulacjami ruchu robota reali-
zowana by∏a animacja jego ruchu wykonana z za-stosowaniem przybornika Virtual Reality pakietuMatlab/Simulink. Przybornik ten pozwala tworzyçrealistycznie trójwymiarowe animacje. Umo˝liwiazadawanie ruchu uk∏adu podczas symulacji. Dzi´kitemu podczas symulacji mo˝na w bardzo szybkii wygodny sposób zrozumieç dzia∏anie projekto-wanego uk∏adu oraz przetestowaç go w czasie rze-czywistym poprzez zastosowanie dodatkowo przy-bornika Real Time Windows Target. Za pomocà blokuVR Sink (rys. 1a) definiuje si´ m.in., jakie elementyrobota b´dà nap´dzane. Mo˝liwe jest zadawaniezarówno przesuni´ç, jak i obrotów. W trakcie animacji,

ROK WYD. LXIX � ZESZYT 1/2010 33
która odbywa si´ w osobnym oknie (rys. 1b) mo˝namanipulowaç animowanà scenà, w tym prze∏àczaçsi´ na zdefiniowane widoki z ró˝nych kamer. Przyu˝yciu przybornika VR animowane sà zarówno prostemodele fizyczne, jak i z∏o˝one, które mogà byç za-projektowane w takich programach, jak 3DStudioMax czy AutoCAD. Istnieje tak˝e mo˝liwoÊç pod-∏àczenia i obs∏ugi d˝ojstika lub myszki.
� Wyniki badaƒ symulacyjnychW badaniach symulacyjnych rozpatrzono elemen-
tarne ruchy robota takie, jak ruch pod∏u˝ny i ruchobrotowy. Wyniki tych badaƒ opisano na przyk∏a-dzie dwóch poni˝szych symulacji.
Symulacja 1Pierwszà prezentowanà symulacj´ zrealizowano
dla ruchu pod∏u˝nego do przodu. Symulacj´ prze-
prowadzono dla danych: pRC = 0,03 m/s (pr´dkoÊçruchu ustalonego), l = 0,06 m (d∏ugoÊç kroku),h = 0,03 m (wysokoÊç kroku), l0 = 0,02 m (prze-suni´cie osi obrotu stopy wzgl´dem osi obrotu nogiw pozycji poczàtkowej [19]) i H = 0,22 m (wysokoÊçpodniesienia korpusu robota).
Robot rozpoczà∏ ruch, rozp´dzajàc si´ do pr´dkoÊcipRC, wykonujàc przy tym przemieszczenia nóg 1 i 4o po∏ow´ nominalnej d∏ugoÊci kroku. Póêniej kor-pus porusza∏ si´ ruchem jednostajnym, a nogi 2 i 3,a nast´pnie 1 i 4 przemieÊci∏y si´ o zadanà d∏ugoÊçkroku. Wreszcie nastàpi∏o hamowanie korpusu ro-bota i przemieszczenie nóg 2 i 3 o po∏ow´ nominal-nej d∏ugoÊci kroku. Na rys. 2a zamieszczono prze-biegi czasowe parametrów ruchu punktu R korpusurobota wyra˝one w nieruchomym uk∏adzie wspó∏-rz´dnych OXYZ, a na rys. 2b tory ruchu punktów B1
Rys. 1. Okno parametrów bloku VR Sink przybornika Virtual Reality (a) oraz okno animacji ruchu robota (b)
Rys. 2. Przebiegi czasowe parametrów ruchu punktu R korpusu robota (tylko sk∏adowe X) (a) oraz tory ruchu punktów B1 i B2 nógrobota w uk∏adzie Rxyz w trakcie ruchu do przodu

ROK WYD. LXIX � ZESZYT 1/201034
i B2 stóp robota w uk∏adzie Rxyz zwiàzanym z jegokorpusem, z zaznaczeniem w nawiasach kolejnoÊciprzenoszenia nóg oraz charakterystycznych chwilczasu t0 – t4. Dla punktu B3 kszta∏t toru ruchu jestpodobny do B2, a dla B4 do B1, co wynika z przyj´tejsekwencji przestawieƒ nóg. Wszystkie wartoÊcipokazano w uk∏adzie Rxyz zwiàzanym z robotem.Charakterystyczne chwile czasu wynoszà odpo-wiednio: t0 = 0,5 s, t1 = 1,5 s, t2 = 2,5 s, t3 = 3,5 s,t4 = 4,5 s.
Na rys. 3 pokazano zmian´ w czasie kàtów prze-gubowych robota (z zaznaczeniem cienkimi czer-wonymi liniami ich dopuszczalnych zakresów wy-nikajàcych z ograniczeƒ konstrukcyjnych i z zasto-sowanych serwomechanizmów). Na rys. 4 z koleizilustrowano zmian´ w czasie pr´dkoÊci kàtowychw tych samych przegubach (z zaznaczeniem cienkimiczerwonymi liniami maksymalnych wartoÊci poda-nych przez producenta dla napi´cia zasilajàcego 6 [V]).
Na rys. 5 natomiast pokazano przebiegi czasowewspó∏rz´dnych Êrodka masy robota (a) i punktuZMP (b) w uk∏adzie zwiàzanym z korpusem robota.Wspó∏rz´dne Êrodka masy robota (rys. 5a) zmieniajàsi´ g∏ównie wzd∏u˝ osi z, co jest zwiàzane z cyklicz-nym podnoszeniem i opuszczaniem nóg. Wspó∏rz´d-ne x zmieniajà si´ równie˝ cyklicznie, lecz w mniej-szym stopniu, a wspó∏rz´dne y nie ulegajà zmianie.Z rys. 5b wynika, ˝e tylko wspó∏rz´dna x punktu ZMPzmienia si´ w trakcie ruchu robota do przodu. Nawykresie mo˝na zaobserwowaç asymetri´ przebiegu,która jest zwiàzana z niezerowà wartoÊcià wspó∏-rz´dnej x0 Êrodka masy korpusu1).
Symulacja 2Kolejnà symulacj´ przeprowadzono dla przypadku
ruchu obrotowego robota w lewo i nast´pujàcychparametrów: γC = 7,5 °/s (maksymalna pr´dkoÊçkàtowa obrotu korpusu), h = 0,03 m (wysokoÊçkroku), l0 = 0,02 m (przesuni´cie osi obrotu stopywzgl´dem osi obrotu nogi w pozycji poczàtkowej [20])i H = 0,22 m (wysokoÊç podniesienia korpusu).
Obrót korpusu robota nast´powa∏ w czterechcyklach. W pierwszym cyklu nogi 1 i 4 (przenoszone)wykonywa∏y obrót w lewo, a 2 i 3 (podparte) w prawoprzy równoczeÊnie obracajàcym si´ w lewo korpu-sie robota. W ten sposób korpus robota obróci∏ si´w lewo o 5°. W drugim cyklu nogi 2 i 3 wykonywa∏yobrót w lewo, a 1 i 4 w prawo, w efekcie czego korpusobróci∏ si´ o kolejne 5°, a nogi powróci∏y do pozycjiwyjÊciowej wzgl´dem korpusu. Podobna sytuacjamia∏a miejsce w pozosta∏ych dwóch cyklach ruchu.W trakcie ka˝dego z cykli pr´dkoÊç kàtowa obrotuw∏asnego korpusu zmienia∏a si´ od zera do γC,a nast´pnie od γC do zera, czyli korpus raz by∏ roz-p´dzany w ruchu obrotowym, a raz hamowany.
Na rys. 6a pokazano przebiegi czasowe paramet-rów kàtowych ruchu korpusu robota wynikajàcez jego obrotu wokó∏ osi z. W trakcie obracania kor-pusu robota, Êrodek masy robota (rys. 6b) prze-mieszcza∏ si´ cyklicznie tylko wzd∏u˝ osi z. Wspó∏-rz´dne punktu ZMP praktycznie nie ulega∏y zmianiew trakcie obrotu korpusu robota (co by∏o spowo-dowane symetrycznym ruchem nóg wzgl´dem Êrodkageometrycznego korpusu), dlatego nie zosta∏y onezamieszczone. Na rys. 7 i 8 zaprezentowano przebiegiczasowe kàtów i pr´dkoÊci kàtowych w przegubachrobota z zaznaczonymi cienkimi liniami ogranicze-
Rys. 3. Kàty przegubowe robota z zaznaczeniem ich dopusz-czalnych zakresów
Rys. 4. Pr´dkoÊci kàtowe w przegubach robota z zaznaczeniemmaksymalnych wartoÊci podanych przez producenta dla na-pi´cia zasilajàcego 6 [V]
Rys. 5. Wspó∏rz´dne Êrodka masy robota (a) i punktu ZMP (b) w uk∏adzie zwiàzanym z korpusem robota
.
..
1) Film prezentujàcy animacj´ ruchu robota do przodu za-mieszczony jest pod adresem: http://pl.youtube.com/watch?v=u_UXwaNuwmo. ˚ó∏ty punkt na animacji symbo-lizuje Êrodek masy robota.

ROK WYD. LXIX � ZESZYT 1/2010 35
Rys. 6. Przebiegi czasowe: parametrów kàtowych ruchu kor-pusu robota (obrót wokó∏ osi z) (a) i wspó∏rz´dnych Êrodkamasy robota w uk∏adzie zwiàzanym z korpusem robota Rxyz (b)
Rys. 7. Kàty przegubowe robota z zaznaczeniem ich dopusz-czalnych zakresów
Rys. 8. Pr´dkoÊci kàtowe w przegubach robota z zaznacze-niem maksymalnych wartoÊci podanych przez producentadla napi´cia zasilajàcego 6 [V]
niami wynikajàcymi m.in. z zastosowanych serwo-nap´dów – analogicznie jak w poprzedniej symulacji2).
Badania eksperymentalne� Ârodowisko szybkiego prototypowaniaW przypadku badaƒ eksperymentalnych wyko-
rzystano wczeÊniej wyznaczone wartoÊci sterowaƒserwomechanizmów, które zapami´tano w sterow-niku serwomechanizmów umieszczonym na robo-cie. W trakcie ruchu robota rejestrowano wielkoÊcidost´pne pomiarowo za pomocà karty kontrolno--pomiarowej Advantech PCI 1710 i przybornika RealTime Windows Target pakietu Matlab/Simulink.
Przybornik Real Time Windows Target umo˝liwiarealizacj´ algorytmu sterowania w czasie rzeczy-wistym z zastosowaniem pakietu Matlab/Simulinkw Êrodowisku Windows. Wymaga on dodatkowozainstalowania kompilatora, np. j´zyka C. Przed roz-pocz´ciem pracy z przybornikiem nale˝y go odpo-wiednio skonfigurowaç, tj.: wybraç odpowiednikompilator oraz zainstalowaç jàdro (kernel). Przy-bornik Real Time Windows Target umo˝liwia wyko-rzystanie w schemacie blokowym Simulinka blo-ków reprezentujàcych dost´pne wejÊcia i wyjÊcia.Dzi´ki temu mo˝na w uk∏adzie sterowania wyko-rzystaç takie elementy, jak: d˝ojstik, porty LPT orazdost´pne wejÊcia/wyjÊcia kart kontrolno-pomia-rowych.
Przybornik ten zosta∏ u˝yty do szybkiego proto-typowania ruchu robota czterono˝nego. W trakciebadaƒ eksperymentalnych wykorzystano bloki AnalogInput oraz Digital Input, które pozwoli∏y na odczytodpowiednich sygna∏ów wysy∏anych z robota.
Niezb´dnà czynnoÊcià przed przystàpieniem dobadaƒ eksperymentalnych by∏o wyznaczenie zwiàzkupomi´dzy sterowaniem PWM serwomechanizmówa kàtami przegubowymi robota oraz zale˝noÊcipomi´dzy tymi kàtami a napi´ciami mierzonymi na
2) Film prezentujàcy animacj´ obracania si´ robota w lewozamieszczony jest pod adresem: http://pl.youtube.com/watch?v=kbXUJv7z87U, a pod adresem: http://pl.youtube.com/watch?v=yN4iuFuSbzQ mo˝na znaleêç film prezentujàcyanimacj´ zró˝nicowanego ruchu robota, sk∏adajàcego si´z kilku elementarnych ruchów – m.in. z ruchu pod∏u˝nego doprzodu i obrotu w lewo.

ROK WYD. LXIX � ZESZYT 1/201036
potencjometrach w przegubach robota. W trakciekalibracji (rys. 9a) okaza∏o si´, ˝e charakterystyki tezale˝à od obcià˝enia nogi, tj. od tego, czy noga jestw fazie podparcia czy przenoszenia.
Do sterowania ruchem serwomechanizmów za-stosowano prototypowy sterownik serwomecha-nizmów (rys. 9b), który zosta∏ po∏àczony przewodemz komputerem PC i generowa∏ sterowania PWMserwomechanizmami w zale˝noÊci od odbieranychdanych. Zawiera∏ on tak˝e funkcj´ zapami´tywaniaprzes∏anych danych, którà wykorzystano w badaniacheksperymentalnych robota. Dodatkowo robot zosta∏wyposa˝ony w uk∏ad do pomiaru pràdu pobieranegoprzez poszczególne serwomechanizmy (rys. 9c).
Ostatecznie dla czterono˝nego robota kroczàcegozosta∏o przygotowane Êrodowisko szybkiego proto-typowania, którego schemat pokazano na rys. 10.
Do rejestrowania wyników badaƒ eksperymen-talnych zosta∏a u˝yta karta kontrolno-pomiarowaAdvantech PCI 1710. Karta ta posiada m.in. 16 po-
jedynczych lub 8 ró˝nicowych wejÊç analogowych,2 wyjÊcia analogowe (dok∏adnoÊç 12 bit) oraz16 wejÊç i 16 wyjÊç cyfrowych. W badaniach ekspe-rymentalnych u˝yto 16 wejÊç analogowych i 4 wejÊ-cia cyfrowe. Badania zosta∏y przeprowadzone dladwóch wariantów, tj. dla pomiaru 8 sygna∏ów z po-tencjometrów i 8 sygna∏ów zu˝ycia pràdu przeznap´dy, oraz dla rejestracji 12 sygna∏ów zu˝yciapràdu przez serwomechanizmy. W obu przypadkachrejestrowano tak˝e sygna∏y ze styczników zamon-towanych w stopach robota.
� Wyniki badaƒ eksperymentalnychBadania eksperymentalne wykonano najpierw dla
elementarnych ruchów robota, a nast´pnie dla zró˝-nicowanego ruchu robota zawierajàcego kilka ele-mentarnych ruchów.
W ramach niniejszej pracy zamieszczono wynikibadaƒ eksperymentalnych dla przypadku ruchurobota do przodu i obrotu w lewo, a nast´pnie po-równano je z wynikami badaƒ symulacyjnychw celu ich weryfikacji.
Eksperyment 1 – Ruch pod∏u˝ny do przoduW pierwszym eksperymencie robot porusza∏ si´ do
przodu, przemieszczajàc si´ po wyk∏adzinie3).Ruch robota sk∏ada∏ si´ z 3 etapów, tj.: rozp´dzania,
ruchu ustalonego oraz hamowania. W trakcie roz-p´dzania i hamowania nogi robota wykonywa∏y prze-mieszczania o po∏ow´ nominalnej d∏ugoÊci kroku.W ruchu ustalonym korpus robota przemieszcza∏si´ analogicznie jak w symulacji 1, tj. z pr´dkoÊcià0,03 m/s. W trakcie ruchu robota wysokoÊç pod-
Rys. 9. Kalibracja serwomechanizmów i potencjometrów w przegubach robota (a),sterownik serwomechanizmów (b) i uk∏ad do pomiaru pràdu pobieranego przezserwomechanizmy (c)
Rys. 10. Schemat Êrodowiska szybkiego prototypowania dla robota
Rys. 11. Zmiana kàtów przegubowych robota w trakcie ruchudo przodu obliczona na podstawie pomiaru napi´ç na po-tencjometrach i znanej charakterystyki (kàt – napi´cie)
3) Film prezentujàcy ruch robota do przodu po wyk∏adziniezamieszczony jest pod adresem: http://pl.youtube.com/watch?v=QNROENAMnQY.

ROK WYD. LXIX � ZESZYT 1/2010 37
niesienia korpusu wynosi∏a 0,22 m, nominalna d∏u-goÊç kroku 0,06 m, a wysokoÊç kroku 0,03 m.
Na rys. 11 i 12 zamieszczono porównanie wyni-ków badaƒ symulacyjnych i eksperymentalnych.Prezentowane wykresy zawierajà rzeczywiste prze-biegi czasowe kàtów (rys. 11) i pr´dkoÊci kàtowych(rys. 12) w przegubach robota z zaznaczeniem ichwartoÊci teoretycznych (cienkie linie), które wynikajàz przeprowadzonej symulacji. Oznaczenia kàtówprzegubowych sà zgodne z [20]. Ostatni wykres(rys. 13) prezentuje sygna∏y ze styczników zamon-towanych w stopach robota. Analizujàc uzyskanewyniki, mo˝na zauwa˝yç du˝à asymetri´ wyst´pu-jàcà w trakcie ruchu rzeczywistego robota. Przejawemtego jest m.in. nierównomierny rozk∏ad si∏ reakcjistóp, co jest widoczne zarówno w trakcie ruchurobota, jak i po jego zatrzymaniu (rys. 13).
Rys. 12. Zarejestrowane pr´dkoÊci kàtowe w przegubach ro-bota oraz wartoÊci zadane (cienkie linie)
Rys. 13. Sygna∏y ze styczników zamontowanych w stopachrobota
Rys. 14. Zmiana kàtów przegubowych robota w trakcie ruchudo przodu obliczona na podstawie pomiaru napi´ç na po-tencjometrach i znanej charakterystyki (kàt – napi´cie)
Rys. 15. Zarejestrowane pr´dkoÊci kàtowe w przegubach robo-ta oraz wartoÊci zadane (przerywane linie)
Rys. 16. Sygna∏y ze styczników w stopach robota
Po zatrzymaniu si´ robota jeden ze stycznikówzamontowanych w stopach by∏ roz∏àczony (s3 = 1),mimo ˝e stopa znajdowa∏a si´ w fazie podparcia.By∏o to efektem tego, ˝e noga ta przejmowa∏amniejszà ni˝ pozosta∏e si∏´ reakcji pod∏o˝a. By∏o tospowodowane b∏´dami kàtów przegubowych nógrobota. Z kolei w trakcie ruchu robota, przy prze-noszeniu nóg 2 i 3, przez chwil´ stycznik w drugiejstopie by∏ roz∏àczony (s2 = 0). By∏o to skutkiem tego,˝e w trakcie chodu diagonalnego robot przechyla∏si´ na boki – w tym przypadku przechyli∏ si´ w stron´przenoszonej nogi 2, która b´dàc tu˝ nad pod∏o˝em,zetkn´∏a si´ z nim, w efekcie czego stycznik w jejstopie zosta∏ na chwil´ zwarty.
Eksperyment 2 – Ruch obrotowy w lewoW drugim eksperymencie robot przemieszcza∏ si´
po ∏awce, obracajàc si´ w lewo4).
4) Film prezentujàcy obracanie si´ robota w lewo na ∏awcezamieszczony jest pod adresem: http://pl.youtube.com/watch?v=BLBNsaocdnQ.
Podobnie jak w symulacji obrót korpusu robotanast´powa∏ w czterech cyklach. W pierwszym cyklunogi 1 i 4 (przenoszone) wykonywa∏y obrót w lewo,a 2 i 3 (podparte) w prawo przy równoczeÊnie obra-cajàcym si´ w lewo korpusie robota. Korpus robotaobraca∏ si´ z maksymalnà pr´dkoÊcià kàtowà 7,5 °/s,wysokoÊç podniesienia korpusu wynosi∏a 0,22 m,a wysokoÊç kroku 0,03 m. Uzyskane wyniki badaƒeksperymentalnych zilustrowano na rys. 14 – 16. Narys. 15 i 16 pokazano odpowiednio rzeczywiste prze-biegi czasowe kàtów i pr´dkoÊci kàtowych w prze-gubach robota z zaznaczeniem ich wartoÊci teore-tycznych (cienkie linie), które wynikajà z przepro-
wadzonej symulacji. Na ostatnim wykresie (rys. 16)pokazano sygna∏y ze styczników zamontowanychw stopach robota.
Z analizy uzyskanych wyników i z zarejestrowa-nych filmów wynika, ˝e ruch obrotowy robota cechujesi´ wi´kszà symetrià w porównaniu z ruchem po-d∏u˝nym. Tym razem wyst´pujà zdecydowaniemniejsze przechylenia korpusu robota, co jest spo-wodowane symetrycznym wzgl´dem jego Êrodkageometrycznego ruchem nóg. Natomiast podob-

ROK WYD. LXIX � ZESZYT 1/201038
nie jak w przypadku ruchu pod∏u˝nego równie˝w ruchu obrotowym mo˝na zaobserwowaç niesy-metryczny rozk∏ad si∏ reakcji stóp, co by∏o spowo-dowane b∏´dami kàtów przegubowych nóg robota.
W efekcie tych b∏´dów, na poczàtku symulacji,kiedy robot jeszcze sta∏, stycznik w pierwszej nodzeby∏ rozwarty (s1 = 1), mimo ˝e stopa znajdowa∏a si´w fazie podparcia. Tego typu b∏´dy wyst´powa∏yzw∏aszcza w fazie czteropodporowej, gdy˝ wówczassi∏y reakcji stóp by∏y mniejsze i niewielki b∏àd usta-wienia nogi powodowa∏, ˝e si∏a reakcji niekiedy by∏azbyt ma∏a do tego, aby odpowiedni stycznik zosta∏zwarty.
Dla opisanego w niniejszej pracy robota wykonanowiele innych eksperymentów, w których robot wy-konywa∏ elementarne i z∏o˝one ruchy5).
PodsumowanieW pracy zamieszczono wyniki badaƒ symula-
cyjnych i eksperymentalnych ruchu robota poparteanimacjami ruchu i filmami prezentujàcymi wyni-ki badaƒ eksperymentalnych. Badania te bazowa∏yna opracowanej w pracy [20] metodzie syntezy ruchurobota. Badania symulacyjne i eksperymentalnezrealizowano przy u˝yciu pakietu Matlab/Simulink.Animacje ruchu robota wykonano z zastosowaniemprzybornika Virtual Reality. Badania eksperymental-ne przeprowadzono metodà szybkiego prototypowa-nia z zastosowaniem przybornika Real Time WindowsTarget pakietu Matlab i karty kontrolno-pomiarowejAdvantech PCI 1710. Wykonane badania ekspery-mentalne zweryfikowa∏y poprawnoÊç proponowa-nych metod syntezy ruchu robota.
Z dotychczasowych badaƒ dotyczàcych stabilnoÊciruchu robota wynika, ˝e zmiana po∏o˝enia zarównoÊrodka masy robota (CG), jak i punktu zerowegomomentu (ZMP) jest niewielka. Zarówno punkt ze-rowego momentu, jak i rzut Êrodka masy robotana p∏aszczyzn´ pod∏o˝a, znajdujà si´ we wn´trzup∏aszczyzny podparcia dla wszystkich rozpatrywanychrodzajów ruchu robota.
Uzyskane podczas badaƒ eksperymentalnych wy-niki Êwiadczà o tym, ˝e w trakcie realizacji ruchurobota wyst´pujà du˝e b∏´dy, jeÊli chodzi o kàtyi pr´dkoÊci przegubowe. Wynikajà one z tego, ˝e innajest charakterystyka (kàty – sterowanie) dla nóg w fa-zie podparcia i dla przenoszenia, co jest zwiàzanez podatnoÊcià przegubów i wyst´pujàcych luzów.Do tego dochodzà b∏´dy odczytu kàtów przy wyz-naczaniu charakterystyki (kàty – sterowanie), b∏´dykalibracji potencjometrów (zwiàzane z odczytemkàtów), podatnoÊç osi potencjometrów i luzy w po-∏àczeniach osi potencjometrów z cz´Êciami nóg (turównie˝ wyst´pujà ró˝nice odczytu kàtów w przy-padku, gdy noga jest w fazie podparcia i przeno-szenia).
W symulacji komputerowej za∏o˝ono brak prze-chylania i pochylania robota w trakcie ruchu, na-tomiast w badaniach eksperymentalnych zauwa˝o-no ich wyst´powanie. By∏o to spowodowane przedewszystkim dok∏adnoÊcià kàtowà zastosowanychserwomechanizmów. Efektem tych b∏´dów by∏o to,˝e wysokoÊci poszczególnych nóg robota ró˝ni∏y si´
o kilka mm, mimo ˝e powinny one byç sobie równe.Dok∏adnoÊç t´ mo˝na poprawiç, zwi´kszajàc roz-dzielczoÊç PWM serwomechanizmów oraz stosujàcserwomechanizmy cyfrowe, które cechujà si´ wi´kszàdok∏adnoÊcià, szybkoÊcià oraz wi´kszym momentemtrzymajàcym, ale i wi´kszym poborem pràdu.
Wyst´pujàce przechylenia i pochylenia robotawynika∏y tak˝e z faktu, ˝e przy zmianie fazy ruchudanej nogi z przenoszenia do podparcia lub odwrot-nie zmienia∏ si´ zwrot momentu nap´dowego i za-stosowane nap´dy nie by∏y w stanie odpowiednioszybko zareagowaç na t´ zmian´, gdy˝ posiadajàprosty regulator proporcjonalny. Zastosowane w sto-pach robota spr´˝yny, wprowadzajàc podatnoÊç,cz´Êciowo zmniejsza∏y opisany efekt, ∏agodzàc przejÊ-cie pomi´dzy fazami ruchu.
Kierunki dalszych badaƒ mogà dotyczyç:– syntezy ruchu robota po równi pochy∏ej, scho-
dach i w zró˝nicowanym Êrodowisku,– syntezy ruchu robota o strukturze kraba,– minimalizacji zu˝ycia energii przez nap´dy ro-
bota,– analizy dynamicznej ruchu robota.
LITERATURA
1. Bai S., Low K. H., Zieliƒska T.: Quadruped free gait genera-tion for straight-line and circular trajectories. Advanced Ro-botics (1999), Vol. 13, No. 5, pp. 513 – 538.
2. Brown C. C., Huissoon J. P.: Temporal gait control of a quad-ruped robot. Robotics and Autonomous Systems 30 (2000)305 – 314.
3. Buehler M., Battaglia R., Cocosco A., Hawker G., Sarkis J.,Yamazaki K.: SCOUT: A simple quadruped that walks,climbs, and runs. IEEE Int. Conf. Robotics and Automation(ICRA), Leuven, Belgium, May 1998.
4. Buono P.-L., Golubitsky M.: Models of central patterngenerators for quadruped locomotion: I. Primary gaits.Journal of Mathematical Biology, Volume: 42, Issue: 4,April, 2001, pp. 291 – 326.
5. Buono P.-L.: Models of central pattern generators forquadruped locomotion: II. Secondary gaits. Journal ofMathematical Biology, Volume: 42, Issue: 4, April, 2001,pp. 327 – 346.
6. Chen Xuedong, Watanabe Keigo, Kiguchi Kazuo, IzumiKiyotaka: A Real-Time Kinematics on the Translational CrawlMotion of a Quadruped Robot. Journal of Intelligent andRobotic Systems, Volume: 29, Issue: 2, October 2000, pp.111 – 131.
7. Gonzalez de Santos P., Jimenez A.: Path tracking with quad-ruped walking machines using discontinuous gaits. Com-puters Elect. Engng 1995, Vol. 21, pp. 383 – 396.
8. Gonzalez de Santos P., Jimenez M. A., Armada M. A.:Dynamic Effects in Statically Stable Walking Machines.Journal of Intelligent and Robotic Systems, Volume: 23,Issue: 1, September 1998, pp. 71 – 85.
9. Hata Keiko, Saeki Katsutoshi, Sekine Yoshifumi: A pulse-type hardware CPG model for quadruped locomotionpattern. International Congress Series Volume: 1291, Com-plete, June, 2006, pp. 157 – 160.
10. Kurazume Ryo, Yoneda Kan, Hirose Shigeo: Feedforwardand Feedback Dynamic Trot Gait Control for QuadrupedWalking Vehicle. Autonomous Robots, Volume: 12, Issue: 2,March 2002, pp. 157 – 172.
11. Nagashino H., Nomura Y., Kinouchi Y.: A neural networkmodel for quadruped gait generation and transitions.Neurocomputing, Volume: 38-40, June, 2001, pp. 1469 –1475.
12. Sehoon Park, Yun-Jung Lee: Discontinuous zigzag gaitplanning of a quadruped walking robot with a waist-joint.Advanced Robotics, Vol. 21, No. 1 – 2, pp. 143 – 164 (2007).
13. Takemura H., Deguchi M., Ueda J., Matsumoto Y.,Ogasawara T.: Slip-adaptive walk of quadruped robot. Ro-botics and Autonomous Systems 53 (2005), pp. 124 – 141.
5) Pod adresem http://pl.youtube.com/watch?v=palR_IicoSomo˝na znaleêç film prezentujàcy zró˝nicowany ruch robotapo ∏awce, sk∏adajàcy si´ z kilku elementarnych ruchów. �

ROK WYD. LXIX � ZESZYT 1/2010 39
14. Trojnacki M.: The modeling, programming and computersimulation of motion for a four-legged robot. ProjektowanieMechatroniczne, Red. T. Uhl, Wydawnictwo Instytutu Tech-nologii Eksploatacji – PIB, Kraków 2006, ss. 149 – 160.
15. Zieliƒska T., Trojnacki M.: Stabilizujàca rola stopy w diago-nalnym chodzie robota. Prace Naukowe – Elektronika podred. K. Tchonia i C. Zieliƒskiego, zeszyt 166, tom 1, OficynaWydawnicza Politechniki Warszawskiej, Warszawa 2008,pp. 195 – 204.
16. Hiroshi Kimura, Yasuhiro Fukuoka, Avis H. Cohen: Biologi-cally inspired adaptive walking of a quadruped robot. Phil.Trans. R. Soc. A (2007) 365, pp. 153 – 170.
17. Kimura Hiroshi, Akiyama Seiichi, Sakurama Kazuaki:Realization of Dynamic Walking and Running of the Quad-ruped Using Neural Oscillator. Autonomous Robots,Volume: 7, Issue: 3, November 1999, pp. 247 – 258.
18. Mahajan A., Figueroa F.: Four-legged intelligent mobileautonomous robot. Robotics & Computer-IntegratedManufacturing 1997, Vol. 13, No. 1, pp. 51 – 61.
19. Sukhatme, Gaurav S.: The Design and Control of a Proto-type Quadruped Microrover. Autonomous Robots, Volume:4, Issue: 2, May 1997, pp. 211 – 220.
20. Trojnacki M.: Synteza ruchu robota czterono˝nego o struk-turze ssaka. Przeglàd Mechaniczny nr 12/09.
Dokoƒczenie z 38 str.
Prof. zw. dr hab. in˝. Antoni Szumanowski jest pracow-nikiem Wydzia∏u SiMR PW.
Jak wiadomo, nap´dy hybrydowe to nap´dymieszane. Lepiej je nazwaç wieloêród∏owymi, gdy˝okreÊla to jednoznacznie ich sposób funkcjonowa-nia – sumowanie energii z co najmniej dwóch êróde∏.Potoczna nazwa hybrydowe odnosi si´ w∏aÊnie dotakiego (dwuêród∏owego) nap´dusamochodów. W tym wypadkunajcz´Êciej silnikowi spalinowemu(cieplnemu) towarzyszy bateriaakumulatorów elektrochemicz-nych, zasilajàca silnik elektryczny.Nap´dem hybrydowym samo-chodu jest tak˝e system z ogni-wem paliwowym, które zast´pujesilnik spalinowy, stanowiàc z aku-mulatorami najbardziej klasycznynap´d dwuêród∏owy zwany sze-regowym (rys. 1a, b). Innymklasycznym uk∏adem jest nap´drównoleg∏y (rys. 2). Nazwy te sàju˝ historyczne i nie nale˝y ichkojarzyç ze Êcis∏à typologià po-∏àczeƒ.
Istotà nap´du hybrydowegosamochodów jest wysoko spraw-ny system sumowania (ró˝nico-
Pojazdy ekologiczne– przysz∏oÊç samochodów hybrydowychANTONI SZUMANOWSKI
wania) mocy obu wymienionych êróde∏. Jedno z nich(silnik cieplny) przyjmuje funkcje dostarczenia nie-zb´dnej energii, drugie (akumulatory) mocy szczy-towej. Wyst´puje tu wi´c zjawisko akumulacji energii,przy szczególnym podkreÊleniu immanentnej cechy
zarówno samochodów elektrycznych, jak i hybrydo-wych – hamowania odzyskowego pojazdu. Stàd in-tegralnà cz´Êcià nap´du hybrydowego jest nap´delektryczny, który w zale˝noÊci od rodzaju i pojem-noÊci zastosowanych akumulatorów mo˝e zapew-niç jazd´ czysto elektrycznà samochodu od kilku(pe∏ny nap´d hybrydowy HEV bez do∏adowaniaakumulatorów z sieci) do kilkudziesi´ciu kilomet-rów (nap´d zwany plug in hybrid – PHEV, czylirozszerzony nap´d elektryczny z silnikiem spali-nowym, w którym akumulatory do∏adowywane sàz sieci).
W obu przypadkach najwa˝niejszy jest dobór takiejstruktury nap´du, aby uzyskaç „przerywanà” prac´silnika spalinowego w zakresie jego najwy˝szejsprawnoÊci (rys. 3).
Poniewa˝ nap´d hybrydowy jest nap´dem z∏o-˝onym, czyli jego ogólna sprawnoÊç jest iloczynemu∏amków – sprawnoÊci wszystkich jego komponen-tów, przez które przenoszona jest moc, to ograni-czenie dzia∏ania silnika spalinowego do quasi-sta-bilnej pracy w zakresie wysokich sprawnoÊci jestjedynà przyczynà wi´kszej sprawnoÊci ogólnej sa-mochodu hybrydowego w porównaniu z samo-chodem klasycznym (rys. 4).
Rys. 1. Nap´dy hybrydowe szeregowe:a) z silnikiem spalinowym; b) z ogni-wem paliwowym: czerwone strza∏kioznaczajà przep∏yw energii podczaspracy hybrydowej, zielone – w czasiehamowania odzyskowego (podobnie nainnych ilustracjach)

ROK WYD. LXIX � ZESZYT 1/201040
***Historia samochodu elektrycznego zaczyna si´
w roku 1881. W 1897 r. w Nowym Jorku pojawi∏ysi´ taksówki elektryczne o zasi´gu jazdy ok. 40 kmprzy pr´dkoÊci ok. 20 km/h. W latach dwudziestychXX wieku w USA jeêdzi∏o ok. 30 000 pojazdówelektrycznych. Odkrycie w tym czasie z∏ó˝ ropy naf-towej w Teksasie obni˝y∏o ceny ropy – i tak zacz´∏asi´ era pojazdów spalinowych. Pojazd spalinowy wy-gra∏ wi´c z pojazdem elektrycznym i dominuje do dziÊ.Powstaje wi´c naturalne pytanie: jak d∏ugo jeszcze?
W latach 2003 – 2006 popyt na rop´ osiàgnà∏ gra-nic´ mo˝liwej poda˝y, powodujàc poziom cen nie-przewidziany przez ekonomistów. Towarzyszy∏ temuwzrost spekulacji, a w efekcie odnotowaliÊmy po-wa˝ny Êwiatowy kryzys gospodarczy. Zdecydowa-na wi´kszoÊç analityków zgadza si´, ˝e zasobówropy – w∏àczajàc te ostatnio oznajmione jako odkryte– starczy na oko∏o 45 – 50 lat, gazu naturalnego na60 lat. OczywiÊcie przy doÊç stabilnym poziomiezu˝ycia ropy, które niestety roÊnie, gdy˝ takie krajejak Chiny czy Indie gwa∏townie si´ motoryzujà.Chiny np. w 2020 roku w stosunku do lat 2002 – 2005potrojà zu˝ycie ropy w transporcie. Do tego trzebadodaç istotny wzrost kosztów wydobycia ropyz nowo eksploatowanych êróde∏ – szczególnie z dnamorskiego czy piasków roponoÊnych.
Minimalizacja strat wewn´trz-nych nap´du hybrydowego jestwi´c celem zasadniczym jego pro-jektowania. Nie jest to zadanieproste. Podstawowym krokiem jestdobór struktury nap´du. Jàdremstruktury jest, najogólniej mówiàc,(poza nap´dem szeregowym, gdziesumowanie odbywa si´ na za-sadzie sieci elektrycznej) dobórw∏aÊciwej przek∏adni mechanicz-nej, która albo sama, albo ste-rowana silnikiem elektrycznym jesttypu CVT (ciàg∏a zmiana prze-∏o˝enia, momentu i pr´dkoÊci). Na
kolejnych rysunkach (rys. 5a, b; 6) pokazano syste-my z przek∏adnià planetarnà o dwóch stopniachswobody, która jest uwa˝ana za najlepszy w´ze∏rozdzielajàcy moment i pr´dkoÊç w nap´dzie hyb-rydowym.
Omówione konstrukcje stanowià podstaw´ wspó∏-czesnych pojazdów hybrydowych.
Czy i kiedy wi´c samochody hybrydowe stanà si´powszechne?
Rys. 2. Nap´d hybrydowy równoleg∏y z silnikiem spalinowymi jeden z przyk∏adów wykonania – Fiat Ecodriver
Rys. 3. Porównanie punktów pracy silnika wysokopr´˝nego w cyklu europejskim NECE w: a) nap´dzie klasycznym orazb) hybrydowym z przek∏adnià planetarnà, takim jak na rys. 4; ∏atwo zauwa˝yç, ˝e du˝y rozrzut punktów na rys. a) jest przyczynàniskiej sprawnoÊci przeci´tnej nap´du klasycznego
Rys. 4. Porównanie sprawnoÊci ogólnej nap´dów samocho-dowych realizujàcych cykl NECE

ROK WYD. LXIX � ZESZYT 1/2010 41
Równie˝ zmiany klimatu global-nego sà ju˝ niekwestionowane.Przyczyna tych dynamicznychzmian wià˝e si´ z wcià˝ wzras-tajàcà emisjà gazów cieplarnia-nych, w tym przede wszystkimCO2. Pami´taç nale˝y, ˝e wskaênikemisji CO2 jest wynikiem zu˝yciaenergii. Czyli im mniej i sprawniejjà zu˝ywamy, tym mniej emituje-my CO2. Transport drogowy jestodpowiedzialny za ok. 30% emisjiCO2. Niemniej jednak w miastachstanowi to blisko 90%.
Na postawione wczeÊniej pyta-nie odpowiedê jest naturalna:trzeba zmieniç system nap´dówpojazdu – w pierwszym rz´dziemiejskich. Trzeba wprowadzaç narynek pojazdy ekologiczne.
Zdefiniowaç trzeba je nast´pu-jàco (rys. 7):
� Zu˝ywajà minimum energiiprzy maksimum sprawnoÊci ogól-nej.
� Cechujà si´ najni˝szym po-ziomem emitowanego ha∏asu.
� Sà bezpieczne przy zasto-sowaniu techniki automatycznejregulacji.
W pojazdach elektrycznych ihybrydowych rola akumulatoraelektrochemicznego jest nie doprzecenienia. DziÊ nast´puje dy-namiczny rozwój baterii litowych.W nap´dach akumulatorowychsamochodów elektrycznych sto-sujemy akumulatory typu HE(wysokiej energii), a w nap´dachhybrydowych HP (o wysokiejg´stoÊci mocy). W nap´dachPHEV – plug in hybrid koniecznyjest kompromis pomi´dzy od-powiednio du˝à g´stoÊcià ener-gii a g´stoÊcià mocy. Coraz cz´Ê-
Rys. 5. Nap´d z przek∏adnià planetarnà o dwóch stopniach swobody: a) nap´d Toyoty(1995-96), b) nap´d Szumanowskiego (1994)
Rys. 6. Nap´d z dwoma przek∏adniami planetarnymi o dwóch stopniach swobody GMAlisson stworzony przez Daimlera, a tak˝e w autobusach Solaris
Rys. 7. Przyk∏ady pojazdów ekologicznych
ciej rozwa˝a si´ jako wspomagajàce êród∏o mocysuper- lub ultrakondensatory elektrolityczne o bar-dzo ma∏ej pojemnoÊci elektrycznej, ale o zdolnoÊ-
ciach przenoszenia obcià˝eƒ pràdowych nawetwyra˝onych wartoÊcià 500 A. Niestety podra˝a tokoszt nap´du.
Koszt energii okreÊlasi´ wskaênikami jej iloÊci(MJ/l). Podobnie w (g/km)na km opisuje si´ emisj´CO2. Obni˝enie kosztówenergii wià˝e si´ z ogólnàsprawnoÊcià nap´du orazmasà pojazdu.
Aby dokonaç porów-naƒ nowych rozwiàzaƒoceny kosztów zu˝yciaenergii i emisji, ocenia si´je, u˝ywajàc odpowied-nich cykli jazdy.

ROK WYD. LXIX � ZESZYT 1/201042
Trzeba w tym miejscu podkreÊliç, ˝e g´stoÊç obj´-toÊciowa energii odniesiona do masy najlepszychlitowo-jonowych akumulatorów elektrochemicznychjest oko∏o 30 razy mniejsza, a g´stoÊç obj´toÊciowaodniesiona do zajmowanej przestrzeni jest oko∏o10 razy mniejsza ni˝ paliw p∏ynnych przetwarzanychprzez silnik spalinowy (rys. 8).
SprawnoÊç przeci´tna nap´du elektrycznego jestoko∏o 3 razy wi´ksza ni˝ mechanicznego z silnikiemspalinowym, co w praktyce mimo wszystko przek∏adasi´ np. w pojazdach akumulatorowych na ponad10-krotnie mniejszy zasi´g jazdy z jednego ∏adowaniaw porównaniu z podobnymi parametrami samocho-du klasycznego.
Pojazdy elektryczne muszà wi´c byç wykorzystaneracjonalnie, w okreÊlonych warunkach transporto-wych, np. w obr´bie aglomeracji przy limitowa-nych mocach oraz pr´dkoÊciach jazdy. Natomiastnap´dy hybrydowe, poprawiajàce znacznie spraw-noÊç spalania wymienionych paliw w silnikachcieplnych, nadajà si´ do wszechstronnego zasto-sowania. Szczególne miejsce znajduje tu nap´d zwanyplug in hybrid.
Bardzo istotnà rol´ w kosztach energii oraz emisjispalin spe∏nia masa pojazdu. Obecnie pracuje si´nad zmniejszeniem masy samochodów nawet trzy-krotnie (rys. 9). Nie jest to sprawa wy∏àcznie nowychmateria∏ów, ale techniki wytwarzania. Masowa, zro-botyzowana produkcja nie nadaje si´ teraz do tychtechnologii. W tym kontekÊcie otwierajà si´ mo˝-
liwoÊci produkcji niszowej, niskoseryjnej pojazdówekologicznych, szczególnie elektrycznych, ale przedewszystkim plug in hybrid.
W USA w 2007 r. sprzedano 352 tys. pojazdówhybrydowych. Znacznie ponad milion porusza∏osi´ po drogach amerykaƒskich w 2008 r. Ostro za-rysowa∏ si´ problem obni˝enia kosztów samocho-dów hybrydowych, w tym szczególnie akumulato-rów. Wzrastajàcy rynek – czyli produkcja, obni˝ykoszty. Niemniej jednak potrzeba nowych rozwià-zaƒ ca∏oÊciowych zmieniajàcych sposób dzia∏aniai form´ wspó∏czesnych samochodów. Przeprowa-dzone badania w wysoko rozwini´tych krajachwskazujà na wysokie preferencje blisko 60% klientów,którzy oczekujà Êredniej ceny samochodów HEVw granicach 20 000 USD, a dro˝szych, bo wi´kszeakumulatory PHEV, o zasi´gu czysto elektrycznymdo ok. 36 km, w cenie 23 000 USD, zaÊ samochodówo zasi´gu do ok. 110 km (znów wi´ksza bateria)w cenie 26 000 USD.
Bardzo istotnym dope∏nieniem tego rynku sà i b´dàniszowe pojazdy o konstrukcji rurowej, produkowanew warsztatach niewymagajàcych zastosowaniadrogich linii produkcyjnych.
***Samochód przysz∏oÊci to cztery ko∏a plus komputer.
Niewàtpliwie celem pojazdów ekologicznych jestich elektryfikacja i hybrydyzacja.
Dlaczego?� Bezpieczeƒstwo energetyczne: umiarkowane
zu˝ycie ropy naftowej w transporcie.� Ograniczenie emisji CO2.� Polepszenie jakoÊci powietrza dla obszarów
krytycznych (miasta).� Z∏agodzenie kryteriów zwiàzanych z emisjà spalin
powsta∏ych od chwili produkcji a˝ do spalania paliww pojeêdzie.
� Samochód elektryczny (BEV) u˝ytkowany wmieÊcie.
� Pe∏ny nap´d hybrydowy (HEV) z dominujàcymsilnikiem spalinowym, ale zasilanym gazem natu-ralnym lub jego mieszaninà z wodorem i biokom-ponentami – na podró˝e pozamiejskie.
� Plug in hybrid (PHEV) znajduje miejsce poÊredniepomi´dzy BEV a HEV; stosuje si´ mniejszy silnikspalinowy ni˝ w HEV, gdy˝ nie trzeba wykorzystywaçgo priorytetowo do do∏adowania akumulatorów,akumulatory majà wi´kszà pojemnoÊç ni˝ w HEV (np.:6 KWh zamiast 3 KWh), ale ponad dwukrotnie mniej-
szà ni˝ w ma∏ych pojazdach czystoelektrycznych.
Takie rozwiàzanie niszowegopojazdu miejskiego PHEV mamyw kraju i najbli˝sze lata poka˝à, czyb´dzie on szeroko stosowany.
Chcàc wi´c mieç wp∏yw na two-rzony w∏aÊnie globalny rynek po-jazdów ekologicznych, trzeba pa-mi´taç o pewnym powiedzeniu„dzia∏ajmy lokalnie, ale myÊlmyglobalnie”, gdy˝ tylko takie post´-
Rys. 8. W∏aÊciwoÊci energetyczne paliw w zestawieniu z aku-mulatorem litowo-jonowym
Rys. 9. Konstrukcja ultralekkiego, 3-metrowego, niszowegosamochodu miejskiego o ∏adownoÊci 450 kg, z ramà koszy-kowo-rurowà (Zak∏ad Nap´dów Wieloêród∏owych PW) i na-p´dem elektrycznym plug in hybrid �

ROK WYD. LXIX � ZESZYT 1/2010 43
powanie pozwoli na aktywne w∏àczenie si´ w nurtrozwoju pojazdów na przyk∏ad o nap´dzie hyb-rydowym.
LITERATURA
1. Szumanowski A.: Fundamentals of hybrid drives. ITEE, Ra-dom 2001.
2. Szumanowski A.: Hybrid Electric Vehicle Drive Design. ITEE,Radom 2006.
3. Szumanowski A., Nguyen K.V., Piórkowski P.: Analysisof Charging-Discharging of Nickel Metal Hybride (NiMH)Battery and Its Influence on the Fuel Consumption of Ad-vanced Hybrid Drives. GPC Detroit, Michigan, USA 2000.
4. Szumanowski A., Yuhua C., Piórkowski P.: Method of BatteryAdjustment for Hybrid Drive by Modeling and Simulation.2005 IEEE Vehicle Power and Propulsion (VPP) Conference inChicago, Illinois, USA.
5. Szumanowski A., Chang Yuhua, Piórkowski P.: Analysis ofDifferent Control Strategies and Operating Modes of Com-pact Hybrid Planetary Transmission Drive. 2005 IEEE VehiclePower and Propulsion (VPP) Conference (Sep.7-9, 2005,Illinois Institute of Technology) in Chicago, Illinois, USA.
Dokoƒczenie z 42 str.
For many years some research works have beenoriented on creating autonomous machines. Domainof remote control, especially for mobile applicationis developed very strongly in the world. The base ofit is intelligent control of gripping device. In suchsystems usually electric drives are used, but latelyhydrostatic drives are applied more often, especiallyin military and police mobile application.
Professional literature shows three directions ofhydraulic system improvement:
– reduction of hydraulic elements numbers in thesystem,
– usage a new, dedicated hydraulic componentsfor specific application,
– implementation of additional control and measur-ing transducers.
Vossoughi G., Donath M. and Nguyen Q.H., Ha Q.P.,Rye D.C., Durrant-Whyte H.F. describe control systemwith position, velocity, acceleration and cylinderpressure feedback. This concept improves motioncontrol of linkage work. Marcus Dapper presents amethod of sensors used in control system of manipu-lator trajectory where feedback control was imple-mented.
In this paper the idea of remote control mobilerobot is presented. Such robot will allow to test ofvarious intelligent autonomous control systems.
Goal of project
The goal of this project is a construction designand selection of components for drive system. Themachine should have, as it was assumed, features ofmobile robot. Hydraulic system was chosen as a robotdrive and operation system. Such solution is verycommon in heavy duty machineries and some ofproject results could be used as a base for automationof bigger machines equipped with electro hydraulicsystem. Controlled object will be designed to give thepossibility of creating mobile robot with features ofautonomous machine.
As a control system for electro hydraulic compo-nents, the Sauer-Danfoss PLUS+1 was applied. It isbased on CANBus technology and it was chosen todrive particular mechanisms. In this paper the con-tinuation of work described in article [1] is presented.Herein the implementation of three concepts of exca-vator control: automatic, semi-automatic and manualare shown.
Robot structure
Fig. 1 shows prototype of mobile robot. This robotstructure consists of chassis and working mecha-nisms with gripping device. Low-weighted elementswill be made from aluminium to reduce total weight ofrobot. The assumed vehicle speed is 20 km/h. Robot’schassis consist of three rubber wheels of 200 mmdiameter, on the left and right sides of the vehicle. Toreceive better drive capability both sets of wheelscould be coupled by the use of cog belt. Two wheels,so called driving wheels, are driven with hydrostaticmotors. Capability of turning is enabled by brakingone of hydrostatic motor. It is similar to steering sys-tems which are used in caterpillar mobile machines.
Working mechanism of proposed mobile robot isfour degrees of freedom mechanism. Movements ofeach element are driven by hydrostatic motor. Only
Mobile robot with hydrostatic drivecontrolled by PLUS+1 module
ARTUR GUZOWSKIANDRZEJ SOBCZYK
Mgr in˝. Artur Guzowski i dr in˝. Andrzej Sobczyk sàpracownikami Wydzia∏u Mechanicznego Politechniki Kra-kowskiej.
Fig. 1. View of proposed mobile robot

ROK WYD. LXIX � ZESZYT 1/201044
the gripping device operations aredriven by hydraulic cylinder.
Hydraulic drive system
Mobile robot hydraulic drivesystem is a two circuits systemsupplied by two pumps. It willgive more possibility of drivingand steering system; by usingboth pump delivery when otherrobot mechanisms are notworking. The robot movementspeed is limited and depends onthe flow consumption by thosemechanisms. Scheme of hydrau-lic drive system is presented inFig. 2.
Working mechanism could bedriven by high-speed hydraulicmotors located in articulatedjoints. A worm gear will be
applied into robot’s arms driveto reduce the angular velocity,increase the torque and ensureself-locking for position keeping/locking. The assumed trans-mission ratio of worm gearequals 50. A worm gear will bealso used as part of structure.The hydraulic scheme of drivenby hydrostatic motors mecha-nisms is shown in Fig. 3.
Control system
Control of the mobile robotwill be possible in 3 modes:automatic, semi-automatic andmanual. Idea of control is shownin Fig. 4.
Automatic mode allows touse autonomous feature of de-signing machine. In that optionrobot realize tasks according tospecified algorithms. The controlsystem will be equipped withsensors to avoid collisions, andto recognize object to be caught.Additionally, it will be possible toinvestigate usage of pictureanalyses as a part of the recogni-tion and robot position andorientation system in unknownenvironment – the special videocamera is mounted on robot.
Fig. 2. Scheme of hydraulic drive sys-tem
Fig. 3. The conception schema of mobile robot mechanisms hydraulic drive andcontrol system
Fig. 4. Idea of multi-modes mobilerobot control system

ROK WYD. LXIX � ZESZYT 1/2010 45
Fig. 5. Elements of control system
This last feature could help toevaluate the size and shape ofobjects and/or obstacles andchoose the best way of catchingor passing the obstacle.
Semi-automated mode enablesto take over control by radioremote control system. In that case, control system,installed on the machine, enables to inform the opera-tor about obstacles in hazardous or invisible zones, byusing video camera. In remote mode operator usesspecial control panel dedicated to PLUS+1 systemcontrollers.
In manual mode, control panel is directly con-nected to machine control system interface. Presenceof operator enables to control the robot directly andwith extra help of special detectors giving signalsabout danger coming from operation field (electricwire detectors, metal detectors, etc.)
Main parts of the control system are PLUS+1 con-trollers. These controllers and other control systemelements are supplied with 24 Volts DC. The anglesbetween parts of robot’s arm are measured byangle encoders installed at the arm joints. Hence it ispossible to control angle position and velocity of theworm gear. Complete specification of the elementsconnected to controller is shown in Fig. 5.
Control unit consist of two Sauer-Danfoss microcontrollers, MC050-020 type. Micro controller has50 pins, 32 bit fixed-point DSP, running at 150 MHzand 12 bit analog-to-digital converter. Among 50 ofpins there are 24 inputs and 12 outputs.
Summary
In the paper the concept of designing and buildingmobile robots has been presented. Simplified struc-ture of the robot has been shown. An interesting pro-posal of using hydrostatic motors with worm gearsinstead of cylinders for driving robot linkages has
been made. It allows to make robot equipment morecompact enlarging its working space.
In addition, proposals of drive and control systemshave been described and shown in schematic way.
Control system base on PLUS+1 produced bySauer-Danfoss was applied. Improved controllabilityand functionality will be obtained by the use of videocamera, joysticks and two-way transmitters, as wellas, compatible control panel.
In next step, the specification of number, types,accuracy and measuring components localizationon the machinery, what should ensure good qualityof control, will be done. It will obtain assumed con-trollability of autonomous mobile vehicle in future.
REFERENCES
1. Vossoughi G., Donath M.: Dynamic Feedback Linearizationfor Electro-hydraulically Actuated Control Systems. Journalof Dynamic Systems, Measurement, and Control, Vol. 117,1995, pp. 468 – 477.
2. Nguyen Q.H., Ha Q.P., Rye D.C., Durrant-Whyte H.F.: Force/Position Tracking for Electro-hydraulic Systems of a RoboticExcavator, 2000.
3. Dapper M.: Kraftsensorlose Manipulator Kraftsteuerung zurAbtastung unbekannter, harter Oberflächen. RheinischenFriedrich-Wilhelms-Universität, Bonn 2003.
4. Frankel J.F.: Development of a Haptic Backhoe Testbed.School of Mechanical Engineering. Georgia Institute of Tech-nology, 2004.
5. Guzowski A., Sobczyk A.: Radio Control System of Excava-tor Drive Mechanism. 4th FPNI PhD Symposium, Sarassota,June 2006.
6. Buczak G., Gawlik A., Sobczyk A.: Wodny hydrostatycz-ny uk∏ad nap´dowy wózka transportowego. Hydraulikai Pneumatyka nr 5/2008, s. 12 – 16.
metody i urzàdzenia pomiarowe
NPFLEX 3D Metrology System firmy Veeco jesturzàdzeniem przystosowanym do precyzyjnych po-miarów powierzchni elementów równie˝ o du˝ychwymiarach (rys. 1). W pomiarach wykorzystywanajest metoda interferencji Êwiat∏a bia∏ego. Przy u˝y-ciu NPFLEX mo˝na dokonywaç pomiarów paramet-rów powierzchni w sposób tradycyjny – metodamikontaktowymi podobnie jak w wypadku koordyna-cyjnych maszyn wspó∏rz´dnoÊciowych CMMs lubprofilometrów przemys∏owych. Zaletami urzàdzeniasà: obrazowanie powierzchni w 3D, szybkie zbieraniedanych pomiarowych oraz lepsza ocena potencjalnejfunkcjonalnoÊci badanego elementu.
Urzàdzenie do badania topografiipowierzchni próbek wielkowymiarowych
Za pomocà NPFLEX mo˝liwe jest dokonywaniepomiarów w szerokim zakresie wymiarów i kszta∏-tów próbek. Z pomiarów uzyskuje si´ pe∏nà infor-macj´ dotyczàcà badanej powierzchni, wykorzys-tywanà nast´pnie w ró˝nego typu analizach. Pomia-ry dokonywane sà w kierunku pionowym z rozdziel-czoÊcià rz´du nanometrów. Urzàdzenie s∏u˝y do po-miarów chropowatoÊci powierzchni, wymiarów kry-tycznych próbki, gruboÊci warstw oraz parametrówtrybologicznych.
W praktyce przemys∏owej kontrola jakoÊci wy-konania przedmiotu polega na badaniu teksturypowierzchni (rys. 2). Wykoƒczenie powierzchni wp∏y-

ROK WYD. LXIX � ZESZYT 1/201046
wa istotnie na jakoÊç elementu, jego funkcjonalnoÊç,trwa∏oÊç oraz podatnoÊç na zniszczenie.
NPFLEX 3D Metrology System umo˝liwia pomia-ry topografii powierzchni na wszystkich etapachpowstawania produktu, od powstania projektu dooceny produktu koƒcowego.
� Badania laboratoryjneW badaniach laboratoryjnych wymagana jest du˝a
elastycznoÊç dotyczàca zarówno mo˝liwoÊci po-miarowych, jak i zakresu analizy wyników. Metodainterferencji Êwiat∏a bia∏ego pozwala na dokonywa-nie bezkontaktowych pomiarów w 3D nawet w wy-padku powierzchni niemo˝liwych do badania innymi
metodami. Przyk∏adem zastosowania mogà byç po-miary chropowatoÊci implantów medycznych.
� Kontrola procesu produkcji i kontrola jakoÊciW przemyÊle lotniczym kontroluje si´ jakoÊç
powierzchni sto˝ka ochronnego rakiety, obrabianegometodà toczenia diamentem. Zwraca si´ uwag´ nafalistoÊç, rozerwania, zawalcowania, zadziory – pa-rametry wp∏ywajàce na aerodynamik´. Du˝e polewidzenia i mo˝liwoÊç analizowania tekstury w zakre-sie mikrometrów umo˝liwiajà precyzyjne okreÊlenieparametrów obróbki.
� Analiza procesu zniszczeniaBadania uszkodzonych i zniszczonych elementów
pozwalajà na wprowadzenie zmian do procesuprodukcji. Po∏àczenie nanometrycznej rozdzielczoÊciz mo˝liwoÊcià dokonywania wielokrotnej analizypojedynczego skanu umo˝liwia uzyskanie w sposóbbezkontaktowy trójwymiarowych danych z uszko-dzonego obszaru próbki (rys. 3).
Przy u˝yciu NPFLEX mo˝na charakteryzowaç próbkio ró˝nych wymiarach i kszta∏tach bez koniecznoÊciwycinania fragmentów materia∏u. Urzàdzenie jest wy-posa˝one w obiektywy z du˝à odleg∏oÊcià roboczà,umo˝liwia te˝ wiele wariantów mocowania próbekdo badaƒ (rys. 4). Przestrzeƒ roboczà mo˝na rów-nie˝ dostosowaç do wymiarów próbek. W wypad-
Rys. 1. NPFLEX umo˝liwia analiz´ stanu powierzchni elementów o ró˝-nych wymiarach: a) badanie turbiny silnika lotniczego, b) powierzchnia∏opatki turbiny z widocznà korozjà w˝erowà
Rys. 2. Obraz powierzchni po frezowaniu, widoczne zadzioryi rodzime defekty punktowe
Rys. 3. Obraz powierzchni próbki po zniszczeniuRys. 4. NPFLEX z obiektywem o odleg∏oÊci roboczej 34 mm,pomiar hypoidalnego ko∏a z´batego

ROK WYD. LXIX � ZESZYT 1/2010 47
NPFLEX mo˝e byç dostosowany do potrzeb kon-kretnego u˝ytkownika, m.in. mo˝e mieç nast´pujàcefunkcje:
– zastosowanie obrotowej g∏owicy optycznejpozwala na wielokrotne badania Êcian bocznych,ukoÊnych kraw´dzi i skoÊnych powierzchni,
– modu∏ Through Transmissive Media oraz komoraÊrodowiskowa umo˝liwiajà badania in-situ w warun-kach zmiennych temperatur (ch∏odzenie i grzanie)materia∏ów dyspersyjnych o gruboÊci do 5 mm,
– sk∏adane zwierciad∏o pozwala na obserwacjeotworów dolnych i Êcian bocznych w elementacho kszta∏cie czaszy.
Opracowano na podstawie materia∏ówfirmy Veeco Instruments Inc.
ku próbek o du˝ych wymiarach, takich jak ca∏y bloksilnika, istnieje mo˝liwoÊç zdemontowania stolikapomiarowego. Dzi´ki zastosowaniu w g∏owicyoptycznej opatentowanej technologii firmy Veecouzyskano odpowiedni kàt apertury numerycznej dladu˝ych odleg∏oÊci roboczych. To sprawia, ˝e za po-mocà NPFLEX mo˝na obrazowaç takie elementytopografii powierzchni, jak: g∏´bokie bruzdy, otworyo du˝ych ró˝nicach wysokoÊci.
Interferometr NPFLEX jest zaprojektowany w spo-sób uwzgl´dniajàcy warunki pracy w hali fabrycz-nej. Jest wyposa˝ony w granitowà podstaw´ zdol-nà do wytrzymania obcià˝enia ponad 200 kg. Kon-strukcja jest odporna na drgania. Innowacyjne roz-wiàzanie chroniàce obiektyw przed uszkodzeniemuniemo˝liwia jego kontakt z próbkà.
z czasopism zagranicznych
Repas R: Ten Principles of Sustainable, Cost-Effective Design.Machine Design, November 05/2009.T∏umaczenie i opracowanie: Martyna Jachimowicz
Producenci z wielu bran˝ k∏adà coraz wi´kszy nacisk nazrównowa˝ony rozwój. Przy projektowaniu i konstruowa-niu maszyn oprócz kosztów istotne znaczenie majà takieczynniki, jak bezpieczeƒstwo, zmniejszenie odpadów i za-nieczyszczeƒ oraz zmniejszona energoch∏onnoÊç. Zrów-nowa˝one projektowanie wymaga przeanalizowania wy-dajnoÊci technologicznej, bezpieczeƒstwa konstrukcji,funkcjonalnoÊci, produktywnoÊci, zu˝ycia materia∏ów orazkonserwacji.
Zasady zrównowa˝onego projektowania sà nast´pujàce:
1. Wyeliminowanie zb´dnych mechanicznych elemen-tów nap´du
Uproszczone konstrukcje z∏o˝one tylko z kilku kompo-nentów pracujà w sposób bardziej efektywny i sà taƒsze.Stare technologie przenoszenia mocy przy u˝yciu serwo-nap´dów polegajàce na stosowaniu ∏aƒcuchów, mecha-nizmów z´batkowych, nap´dów Êlimakowych cz´sto sàprzeszkodà w konstruowaniu wydajniejszych konstrukcji.Przestarza∏e elementy cz´sto si´ zu˝ywajà, wymagajàcz´stych konserwacji.
Projektanci w coraz wi´kszym stopniu wykorzystujàzaawansowane sposoby projektowania i symulacje kom-puterowe w celu wyeliminowania zb´dnych komponen-tów z konstrukcji, np. wa∏ów transmisyjnych, a tak˝e kosz-townych elementów hydraulicznych i pneumatycznych.Korzystajàc z narz´dzi mechatronicznych, konstruktor mo˝eanalizowaç zu˝ycie energii, budowaç wirtualne prototypyi dokonywaç wyboru najlepszego pod wzgl´dem me-chanicznym rozwiàzania konstrukcyjnego. To rozwiàzaniepozwala na zmniejszenie zu˝ycia energii, obni˝enie kosz-tów konserwacji oraz na zwi´kszenie okresu sprawnoÊciurzàdzenia i jego niezawodnoÊci.
Konstruktorzy maszyn stosujà technologi´ nap´du bez-poÊredniego (direct drive motion) w celu poprawieniawydajnoÊci. Wspomniana technologia pozwala na tworze-nie bardziej dok∏adnych, niezawodnych oraz bardziej wy-dajnych energetycznie urzàdzeƒ taƒszych w utrzymaniu.Przyk∏adowo wymiana przek∏adni Êlimakowej na nap´dbezpoÊredni przy u˝yciu si∏ownika spowodowa∏a wzrost
Dziesi´ç zasad efektywnegoi zrównowa˝onego projektowania
wydajnoÊci mechanicznej maszyny z 29 do 98%. Zasto-sowanie technologii nap´du bezpoÊredniego pozwala nastosowanie mniejszych serwonap´dów, co skutkuje zu˝y-ciem mniejszej iloÊci energii.
2. Zmniejszenie masy niezb´dnych komponentów me-chanicznych
Po wyeliminowaniu wszystkich zb´dnych elementówkonstrukcyjnych, nast´pnym krokiem jest zmniejszeniemasy pozosta∏ych elementów. W tym celu stosuje si´zaawansowane narz´dzia do analizy napr´˝eƒ i odkszta∏-ceƒ oraz modelowania konstrukcji. To pozwala projek-tantom na dobór alternatywnych materia∏ów, które sà l˝ejszei poprawiajà wydajnoÊç energetycznà urzàdzenia.
Metody projektowania szeroko stosowane w przemyÊlelotniczym pozwalajà na zmniejszenie wagi elementówkonstrukcji bez zmiany jej wytrzyma∏oÊci. Korzystajàc z me-tod projektowania 3D (CAD, MES), mo˝na zaprojektowaçelementy o bardziej skomplikowanych kszta∏tach. Zaawan-sowane techniki wytwarzania umo˝liwiajà uzyskaniepo˝àdanych kszta∏tów bez koniecznoÊci stosowania dalszejobróbki wykaƒczajàcej.
3. Zastàpienie nap´du hydraulicznego elektrycznymTam gdzie jest to mo˝liwe, zamiast hydraulicznych
i pneumatycznych elementów nap´du nale˝y stosowaçnap´d elektryczny (rys. 1). Elementy hydrauliczne i pneuma-tyczne pomimo ni˝szych kosztów poczàtkowych sà dro˝szew eksploatacji i wp∏ywajà na wy˝sze koszty energii.
Rys. 1. Nap´dy elektryczne, np. TL-Series firmy RockwellAutomation korzystajà z oprogramowania narz´dziowegoRSLogix 5000 firmy Rockwell, pozwalajàcego na okreÊlenieprofili obcià˝eƒ i ruchu, które zadecydujà o wyborze odpo-wiedniego silnika liniowego, a nast´pnie mogà szybkoskonfigurowaç system sterowania ruchem

ROK WYD. LXIX � ZESZYT 1/201048
Zintegrowane kontrolery bezpieczeƒstwa zmniejszajà liczb´specjalnych elementów zabezpieczajàcych znajdujàcychsi´ w hali produkcyjnej, a tak˝e liczb´ operacji zwiàzanychz utrzymaniem ruchu. BezpoÊrednià korzyÊcià dla u˝yt-kowników maszyn jest mniejsza liczba awarii oraz wi´ksza˝ywotnoÊç maszyny, przy mniejszych nak∏adach na kon-serwacj´. Ponadto zintegrowane systemy sterowania i kon-troli zapewniajà szerszy dost´p do danych operacyjnychmaszyny i pozwalajà na Êledzenie jej stanu. Zmniejsza toliczb´ przerw w pracy i ponownych rozruchów maszyny.
Kontrolery pr´dkoÊci sterujà dzia∏aniem takich urzàdzeƒjak lampki kontrolne, kurtyny Êwietlne oraz wy∏àczniki bez-pieczeƒstwa. Kontrolery pr´dkoÊci zmniejszajà pr´dkoÊçroboczà maszyny do poziomu bezpiecznego zarówno dlaurzàdzenia, jak i dla operatora. Kontrolery pr´dkoÊci poz-walajà operatorowi dokonywaç przeglàdu oraz wykonywaçinne zadania, podczas gdy maszyna pozostaje w ruchu.Ich stosowanie zwi´ksza równie˝ okres sprawnoÊci maszynyi zmniejsza zu˝ycie energii, poniewa˝ maszyna nie musibyç cz´sto wy∏àczana i ponownie uruchamiana.
Innym sposobem skojarzenia kontroli bezpieczeƒstwa zestandardowym systemem sterowania maszynà jest po-∏àczenie sieciowe. Wprowadzenie po∏àczeƒ sieciowych dajeproducentom wiele korzyÊci, w tym: zwi´kszenie wydaj-noÊci produkcji, zmniejszenie okablowania na hali fab-rycznej, lepszà diagnostyk´ maszyn i urzàdzeƒ, szybszydost´p do wszelkich danych zwiàzanych z pracà urzàdzeƒ.Sieç umo˝liwia bezprzewodowà komunikacj´ i ca∏kowitàautomatyzacj´ procesu produkcji.
7. Rozmieszczenie kontrolerów i urzàdzeƒ sprz´-gajàcych w pobli˝u miejsca stosowania
Podczas gdy wiele urzàdzeƒ sterujàcych jest mon-towanych w szafach sterowniczych, mo˝liwe jest prze-niesienie ca∏ego uk∏adu sterujàcego w po∏o˝enie znajdu-jàce si´ blisko maszyny.
Standardowe elementy automatyki, tzn. kontrolery, roz-ruszniki silnika, nap´dy, czujniki, styczniki, elementy sie-ciowe, skrzynki rozdzielcze, urzàdzenia I/O i HMI mogà byçrozmieszczone bezpoÊrednio na maszynie (on-machine).
Niektóre podzespo∏y sterowania montowano na ma-szynach od zawsze, jednak zmiana polega na liczbie pod-zespo∏ów przeniesionych bli˝ej miejsca dzia∏ania aplikacji.Rozwiàzanie on-machine skraca czas projektowania i in-stalacji, a tak˝e czas monta˝u ca∏ego uk∏adu sterowania.To rozwiàzanie pozwala równie˝ na wyeliminowanie b∏´-dów zwiàzanych z instalacjà.
8. Rozwój kodowania modu∏owegoProgramowanie elementów automatyki jest kosztowne
i poch∏ania oko∏o 80% kosztów projektowania i wykona-nia ca∏ego uk∏adu sterowania. Wykorzystanie do progra-mowania standardowych metod programowania i modelipozwala na skrócenie czasu programowania, diagnozowaniai konserwowania systemu.
9. Lepsze wykorzystanie diagnostykiUrzàdzenia zbierajàce dane sà obecnie integralnà cz´Êcià
kontrolerów. Umo˝liwia to monitorowanie i zapobieganieewentualnym uszkodzeniom maszyny.
Urzàdzenia wyposa˝one w po∏àczenia z siecià Interneti Ethernet pozwalajà na wykrywanie uszkodzeƒ na od-leg∏oÊç. Wp∏ywa to na obni˝enie kosztów przez wyelimi-nowanie kosztów dojazdu i przeglàdu na miejscu.
10. Wbudowanie systemów IT do maszynyUrzàdzenia IT, w które sà wyposa˝one maszyny, mogà
dostarczaç informacji na temat wydajnoÊci energetycznejoraz ca∏kowitej sprawnoÊci wykorzystywanego sprz´tu.Systemy IT zwi´kszajà tak˝e korzyÊci wynikajàce ze sto-sowania systemów monitorujàcych track-and-trace. Dzi´kitym systemom u˝ytkownik mo˝e przeÊledziç ca∏y procesprodukcyjny i wprowadziç ewentualne zmiany.
Nap´dy elektryczne ∏àczà du˝à szybkoÊç z du˝à do-k∏adnoÊcià, powtarzalnoÊcià i niezawodnoÊcià. Ponadtoich modu∏owa konstrukcja pozwala na stosowanie w wielutypach maszyn.
4. Przeprowadzanie kontroli po zaprojektowaniu ele-mentów mechanicznych konstrukcji, ale przed projek-towaniem uk∏adu sterowania
Kontrola bezpieczeƒstwa konstrukcji pozwala in˝ynie-rom na okreÊlenie ryzyka we wczesnym stadium powsta-wania projektu. Sprawdzenie dotyczy stopnia zintegrowa-nia uk∏adu sterowania i pomaga w doborze architekturytego uk∏adu. Wbudowanie systemu kontroli bezpieczeƒstwaw uk∏ad sterowania umo˝liwia skrócenie czasu wytwarza-nia urzàdzenia, a u˝ytkownikom pozwala na optymali-zacj´ produkcji dzi´ki zautomatyzowanemu systemowi,który steruje pracà maszyny w sposób bardziej efektywnyi bezpieczny (rys. 2).
5. Zabezpieczenie i kontrola dost´pu do ruchomychcz´Êci
JeÊli ryzyko zwiàzane z u˝ytkowaniem danej maszynynie mo˝e zostaç wyeliminowane, wówczas instaluje si´bariery ochronne. Niezamontowane na sta∏e zabezpie-czenia, takie jak zdejmowalne wahliwe lub przesuwne kur-tyny bezpieczeƒstwa, sà stosowane, gdy konieczny jestcz´sty dost´p do niebezpiecznego obszaru. W innychwypadkach zintegrowany system bezpieczeƒstwa moni-toruje obecnoÊç operatora maszyny.
Zintegrowany system bezpieczeƒstwa jest przydatny dotych zastosowaƒ, w których konieczne sà zaawansowanefunkcje. Prawid∏owo zaprojektowany system bezpieczeƒ-stwa i zabezpieczenia redukujà czas dost´pu i powodujà, ˝emaszyna staje si´ bezpieczniejsza, a jej praca bardziejwydajna.
6. Zintegrowane systemy bezpieczeƒstwa zmniejszajàz∏o˝onoÊç uk∏adu sterowania
Coraz cz´Êciej ∏àczy si´ standardowe funkcje sterowa-nia z funkcjà kontroli bezpieczeƒstwa maszyn, co pozwalauniknàç podwójnego oprzyrzàdowania, wp∏ywa na zwi´k-szenie produktywnoÊci i zmniejszenie kosztów produkcji.
Rys. 2. GuardMotion jest nowoczesnym rozwiàzaniem w za-kresie bezpieczeƒstwa maszynowego, umo˝liwia konstruk-torom maszyn wprowadzenie rozwiàzaƒ zwi´kszajàcychbezpieczeƒstwo u˝ytkowania i zapewniajàcych maksymalnewykorzystanie mo˝liwoÊci maszyn

Z KRAJU I ZE ÂWIATA Nast´pny zeszytKomputerowa analiza napr´˝eƒ MESwybranych elementów metalowegosprz´g∏a podatnego skr´tnie– w artykule przedstawiono wynikiprzeprowadzonej analizy napr´˝eƒwybranych elementów metalowegosprz´g∏a podatnego skr´tnie z wyko-rzystaniem metody elementów skoƒ-czonych, do zamodelowania oraz sy-mulacji komputerowej obcià˝eƒ po-szczególnych podzespo∏ów zastoso-wano program Autodesk Inventor2009.
Aplikacja gospodarki narz´dziowejdla NX– w pracy opisano aplikacj´ wspo-magajàcà gospodark´ narz´dziowà,pozwalajàcà na przechowywanie zbio-ru danych oraz na ich ∏atwy eksportdo systemu NX, przedstawiona w ar-tykule aplikacja mo˝e zostaç wyko-rzystana do zarzàdzania narz´dziamiskrawajàcymi w systemie CAD/CAMoraz byç inspiracjà do tworzenia tech-nologicznych baz danych uspraw-niajàcych dzia∏anie firm i przedsi´-biorstw.
Techniki szybkiego prototypowania– przedstawiono mo˝liwoÊci, jakiedaje zastosowanie technik szybkiegoprototypowania, omówiono podstawyprocesu rapid prototyping oraz poda-no obszary zastosowania tych metod,a tak˝e ich g∏ówne zalety i wady,w zamieszczonej w pracy tabeli zesta-wiono najcz´Êciej stosowane technikirapid prototyping z podaniem nazwyi krótkiej charakterystyki procesu.
Przeglàd eksperymentalnych metodbadaƒ uk∏adów dolotowych t∏okowychsilników spalinowych– w artykule dokonano przeglàdui krótkiego opisu eksperymentalnychmetod badaƒ uk∏adu dolotu powiet-rza, g∏ównie w aspekcie strat przep∏y-wu powietrza, warunków przep∏ywustrugi powietrza i nape∏nienia cylin-drów t∏okowego silnika spalinowego,w przeglàdzie uwzgl´dniono metod´Tanaki, nast´pnie opisano metod´Hubera i jej modyfikacje przeprowa-dzone w WAT oraz metody opracowa-ne w Instytucie Pojazdów PW przezF. Rawskiego. Przeglàd koƒczy opismetody Hartenberga.
� Precision Urban Hopper toniewielki robot, majàcy wielkoÊçpude∏ka na buty, którego na po-trzeby wojska opracowa∏a firmaBoston Dynamics z Massachu-setts. Robot porusza si´ na czte-rech sporych kó∏kach i potrafiprzeskoczyç przeszkod´ o wyso-koÊci nawet 7,5 m dzi´ki poru-szanej t∏okiem „nodze”. Robot wy-posa˝ony jest w system GPS i mapomóc w dzia∏aniach zwiadow-czych na terenie miast.� Z raportu, który powsta∏ w2009 r. na potrzeby PolskiejAgencji Rozwoju Przedsi´bior-czoÊci w ¸ódzkim RegionalnymParku Naukowo-Technologicznym,wynika, ˝e w Polsce sà modnetechnoparki, a ich rozwój zwià-zany jest ze strategià UE, któraw znaczàcy sposób finansuje teinicjatywy. W polskie technoparkizainwestowano 650 mln z∏, a po-∏owa tych Êrodków pochodzi∏az funduszy unijnych. Zgodnie z ra-portem w Polsce jest 47 tzw.inicjatyw parkowych, w którychdzia∏ajà 583 firmy i pracuje ponad17 tys. osób.� Fundacja na rzecz Nauki Pol-skiej po raz kolejny wyró˝ni∏apolskich uczonych, których odkry-cia i osiàgni´cia zapewniajà Polscemiejsce w nauce Êwiatowej. Wdziedzinie nauk humanistycznychi spo∏ecznych nagrod´ otrzyma∏prof. Jerzy Strzelczyk z InstytutuHistorii Uniwersytetu im. A. Mic-kiewicza w Poznaniu. Prof. AndrzejKoliƒski z Wydzia∏u Chemii Uni-wersytetu Warszawskiego otrzy-ma∏ nagrod´ za dzia∏alnoÊç wdziedzinie nauk przyrodniczychi medycznych. W dziedzinie naukÊcis∏ych nagrod´ otrzyma∏ prof.Józef BarnaÊ z Instytutu FizykiUniwersytetu im. A. Mickiewiczai Instytutu Fizyki Molekularnej PANw Poznaniu, a w dziedzinie nauktechnicznych prof. Bogdan Mar-ciniec z Wydzia∏u Chemii Uni-wersytetu im. A. Mickiewicza.� Japoƒski producent kompu-terów NEC przedstawi∏ wynalazeknazwany Tele Scouter. Zintegro-wano w nim oprawki do okularówz minikomputerem i monitorem,a ca∏oÊç funkcjonuje jako t∏umacz.S∏owa wypowiedziane przez roz-mówców sà nagrywane, a nas-t´pnie przesy∏ane do serwera,gdzie zostajà przeanalizowane iprzet∏umaczone. Serwer przesy∏at∏umaczenie w formie tekstowejdo Tele Scoutera interlokutora,który na monitorze czyta je ju˝w swoim j´zyku. Urzàdzenie jestna razie w stadium ekspery-mentalnym.
Z ARCHIWUMOcenia si´, ˝e Stany Zjedno-
czone wyprodukowa∏y w r. 1967
20,3 mln ton papieru, a wi´c
o 100 tys. ton wi´cej ni˝ przed
rokiem oraz 21,9 mln ton tektury
i kartonu.
Polska eksportuje ok. 1100
ró˝nych asortymentów narz´dzi
skrawajàcych, precyzyjnych i po-
miarowych elektrycznych i pneu-
matycznych. Obecnie narz´dzia
takie produkuje 67 zak∏adów, nie
liczàc wytwórców spó∏dzielczoÊci
pracy.
Po raz czwarty Paƒstwowy
Inspektorat Gospodarki Paliwo-
wo-Energetycznej, NOT i Try-
buna Ludu og∏osi∏y konkurs
oszcz´dzania paliw i energii.
Ogólna suma nagród w konkur-
sie wynosi 1 325 000 z∏, w tym
nagroda pierwsza – 100 tys. z∏
oraz dwie drugie po 50 tys. z∏.
Prezydium Komitetu Nauki i
Techniki zapowiedzia∏o urucho-
mienie w najbli˝szym czasie
dwóch zak∏adów wytwarzajàcych
tlenek glinu. Tym samym sprawa
produkcji aluminium z glinu,
wed∏ug oryginalnej metody, ruszy
wreszcie z miejsca.
Produkcja tworzyw sztucznych
w Stanach Zjednoczonych osiàg-
n´∏a w ub. r. poziom 6570 tys. ton.
Ponad 2/3 tej produkcji to two-
rzywa polimeryzacyjne: polietylen
1736, tworzywa winylowe 1301
i styrenowe 1153 tys. ton.
Âwiatowe zapotrzebowanie na
rud´ ˝elaznà nieustannie roÊnie,
co powoduje, ˝e wzrasta rów-
noczeÊnie zale˝noÊç krajów –
producentów ˝elaza i stali od
importu surowca. W 1950 roku
17% przetopionej na Êwiecie rudy
˝elaza pochodzi∏o z importu.
W 1964 roku udzia∏ ten wzrós∏
do 30%, a w roku bie˝àcym
prawdopodobnie do 33%. Prze-
widuje si´, ˝e w 1975 roku udzia∏
importowanej rudy w Êwiatowej
produkcji ˝elaza osiàgnie 36%.
Wed∏ug stanu na dzieƒ 1 stycz-
nia br. przemys∏ polski produku-
je 6035 wyrobów powszechnego
u˝ytku uprawnionych do oznacza-
nia znakiem jakoÊci. W tej liczbie
153 wyroby posiadajà atest klasy
Q, 5131 oznaczonych jest jedynkà,
a 751 – tzw. znakiem kontrolnym.
Przeglàd Mechaniczny nr 6/1968