Paper Heliostat
8
Abstract— The main objective of this paper is to design the me chani sm of ac ti ve trac kin g dual-axi s mode Sensor less he li ostat and pr oduce power us ing the conce ntrated sol ar ene rgy . The concentrated sol ar energy is converted using Thermo Electric Generators TEGs! which conver t the thermal ene rgy of the sun dire ctly into elec trici ty. The accur acy and stabi lity of tracking system will be analy"ed for future development usage. The paper aims to provide a prototype design for future large scale power production to mitigate energy crisis. The sensor less tracking of sun and movement of the system is governed by complex astronomical calculations which give us the location of the sun at a particular lati tud e# longit ude and ti me . The syst em empl oys accurate gear assemblies and feedback control system to ac hi eve pr eci se and smooth mo ti on re$ ui red for tracking. %aintenance free Software of the system needs only to be co nf igured once. &t on ly has on e ti me manufacturing cost and its maintenance cost is negligible with respect to output of the system. Index Te rms— Feedback Control System, Parabolic Reflector, Sensorless Sun tracking, Thermoelectric !enerators I. INTRODUCTION Even in today’ s world ma rket , with al l of the va st technoloy advancements and im!rovements, there are still !eo!le who live in darkness at niht and "se candle liht or kerosene lam!s to st"dy. These !eo!le have the knowlede that electricity e#ists$ however, the area in which they reside lacks the infrastr"ct"re and reso"rces for s"ch an amenity. %lso, thro"ho"t the world, the demand for "sea&le enery is increasin ra!idly, with electricity &ein the enery of choice. This electricity !rod"ction, however, does not come free. There is cost associa ted with the infrastr "ct"r e for settin "! new !ower !rod"ction facilities and the risin cost and lack of nat"ral reso"rces s"ch as oil, coal, and nat"ral as. One sol"tion is to steer away from conventional methods and look for novel, alternative, renewa&le enery res o"r ce s, s"c h as sol ar ene ry. The s"n is an e#c ell ent so"rce of radiant enery, and is the world’s most a&"ndant so"rce of enery. It emits electromanetic radiation with an averae irradiance of '()( *+m on the earth’s s"rface -', . The solar radiation incident on the Earth’s s"rface is com!rised of two ty!es of radiation / &eam and diff"se, ranin in the wavelenths from the "ltraviolet to the infrared 0(11 to 11 nm2, which is characteri3ed &y an averae solar s"rf ace tem!e rat"r e of a!!ro #imat ely 411156 -'1. The amo"nt of this solar enery that is interce!ted is )111 times reater than the s"m of all other in!"ts / terrestrial n"clear, e othe rmal an d r av itationa l ener i es, and l"na r ravitational enery -'. To !"t this into !ers!ective, if the enery !rod"ced &y ) acres of the s"rface of the s"n were har ves ted, the re wo" ld &e eno "h ene ry to s"! !ly the c"rrent enery demand of the world. 7e liosta t is a device con sis tin of an assem&ly which revolves slowly occ"!yin a trackin mechanism so as to convere s"nliht at a fi#ed foc"s. The concentrated s"nl i ht at the fo c"s !r ovides &e tt er sola r en er y concentration "sae. In order to maintain their hih !erformance in concentratin solar !ower systems, a concentratin &ody has most cr"cial im!ort an ce amon all !a rt s as any ir re "la ri ty in concentrator sha!e can make the foc"s !oint ar&itrary and non effective. 8or this reard 9h"ai et al. -( !ro!osed new desins for concentrator+cavity receiver systems "sin the :onte;Carlo ray;tracin method. In the st"dy, the radiation fl"# distri&"tion inside the receiver was calc"lated, and, &y !erformin ray;tracin analysis for differe nt eometry of receivers, they !ro!osed the <"!side;down !ear cavity= as Umar 8aroo> ' , :"hammad 9alman Tahir , Na"man 7aider ( , 7afi3 :"hammad Ishtia> %wan ? , :"33amil @an A"a ) De!artment of Electrical Enineerin University Of The B"nAa&, )?)1 ahore, Bakistan. ' enr."marfaroo>yahoo.com, s"!er&salmanhotmail.com, (na"manFhaiderhotmail.com, ? ishtia>Fawan'G)hotmail.com, ) AAF?F"hotmail.com Desin and Im!lementation of a ow Cost D"al;%#is 7eliostat :irror 9ystem for Bower Brod"ction B"r!oses
-
Upload
muzzamil-janjua -
Category
Documents
-
view
215 -
download
0
Transcript of Paper Heliostat

8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 1/8
Abstract— The main objective of this paper is to design
the mechanism of active tracking dual-axis mode
Sensorless heliostat and produce power using the
concentrated solar energy. The concentrated solar
energy is converted using Thermo Electric GeneratorsTEGs! which convert the thermal energy of the sun
directly into electricity. The accuracy and stability of
tracking system will be analy"ed for future development
usage. The paper aims to provide a prototype design for
future large scale power production to mitigate energy
crisis.
The sensor less tracking of sun and movement of the
system is governed by complex astronomical calculations
which give us the location of the sun at a particular
latitude# longitude and time. The system employs
accurate gear assemblies and feedback control system to
achieve precise and smooth motion re$uired for
tracking. %aintenance free Software of the system needsonly to be configured once. &t only has one time
manufacturing cost and its maintenance cost is negligible
with respect to output of the system.
Index Terms— Feedback Control System, Parabolic
Reflector, Sensorless Sun tracking, Thermoelectric
!enerators
I. INTRODUCTION
Even in today’s world market, with all of the vasttechnoloy advancements and im!rovements, there are still
!eo!le who live in darkness at niht and "se candle liht or kerosene lam!s to st"dy. These !eo!le have the knowlede
that electricity e#ists$ however, the area in which they residelacks the infrastr"ct"re and reso"rces for s"ch an amenity.%lso, thro"ho"t the world, the demand for "sea&le eneryis increasin ra!idly, with electricity &ein the enery of
choice. This electricity !rod"ction, however, does not comefree. There is cost associated with the infrastr"ct"re for settin "! new !ower !rod"ction facilities and the risincost and lack of nat"ral reso"rces s"ch as oil, coal, andnat"ral as. One sol"tion is to steer away from conventionalmethods and look for novel, alternative, renewa&le enery
reso"rces, s"ch as solar enery. The s"n is an e#cellentso"rce of radiant enery, and is the world’s most a&"ndantso"rce of enery. It emits electromanetic radiation with an
averae irradiance of '()( *+m on the earth’s s"rface -',. The solar radiation incident on the Earth’s s"rface iscom!rised of two ty!es of radiation / &eam and diff"se,
ranin in the wavelenths
from the "ltraviolet to the infrared0(11 to 11 nm2, which is characteri3ed &y an averae solar s"rface tem!erat"re of a!!ro#imately 411156 -'1. Theamo"nt of this solar enery that is interce!ted is )111 times
reater than the s"m of all other in!"ts / terrestrial n"clear,eothermal and ravitational eneries, and l"nar ravitational enery -'. To !"t this into !ers!ective, if theenery !rod"ced &y ) acres of the s"rface of the s"n were
harvested, there wo"ld &e eno"h enery to s"!!ly thec"rrent enery demand of the world.
7eliostat is a device consistin of an assem&lywhich revolves slowly occ"!yin a trackin mechanism soas to convere s"nliht at a fi#ed foc"s. The concentrateds"nliht at the foc"s !rovides &etter solar enery
concentration "sae.In order to maintain their hih !erformance in concentratinsolar !ower systems, a concentratin &ody has most cr"cialim!ortance amon all !arts as any irre"larity inconcentrator sha!e can make the foc"s !oint ar&itrary andnon effective. 8or this reard 9h"ai et al. -( !ro!osed new
desins for concentrator+cavity receiver systems "sin the:onte;Carlo ray;tracin method. In the st"dy, the radiationfl"# distri&"tion inside the receiver was calc"lated, and, &y !erformin ray;tracin analysis for different eometry of receivers, they !ro!osed the <"!side;down !ear cavity= as
Umar 8aroo>', :"hammad 9alman Tahir , Na"man 7aider (, 7afi3 :"hammad Ishtia> %wan?,
:"33amil @an A"a)
De!artment of Electrical Enineerin
University Of The B"nAa&, )?)1
ahore, Bakistan.'enr."marfaroo>yahoo.com, s"!er&salmanhotmail.com, (na"manFhaiderhotmail.com,?ishtia>Fawan'G)hotmail.com, ) AAF?F"hotmail.com
Desin and Im!lementation of a ow Cost D"al;%#is
7eliostat :irror 9ystem for Bower Brod"ction B"r!oses

8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 2/8
the cavity receiver that !resents the most sta&le enery fl"#
thro"h its a!ert"re.7eliostats have &een "sed to concentrate solar enery for many years. %mon the challenes to &e overcome areenery losses and s"n trackin. Chen et al. -? !ro!osed afi#ed asymmetric c"rvat"re with the s!innin;elevationtrackin method. This restriction was intended to e>"ali3e
the man"fact"re cost of the new heliostat with that of
traditional heliostats with a3im"th;elevation trackin ands!herical c"rvat"re. The res"lts showed that the newheliostat desin co"ld red"ce the receiver s!illae loss &y'1/(1H, and !rovided ood "niform !erformance witho"tlare variations with time of day. Instead of !erformin
trackin motions in discrete ste!s as it is done in mostheliostat systems, 6ri&"s et al. -) !ro!osed a contin"o"strackin methodoloy. % sinificant red"ction of trackinerror &y smooth contin"o"s trackin was achieved.:eas"rements of heliostat motion showed that aimin error d"e to trackin intervals was !ractically eliminated.
In order to avoid shadin of the dish &y thereceiver, 6ri&"s and Ries -4 !ro!osed a new concentrator
desin for small systems with a constraint of limitedmo&ility of the receiver which is accom!lished &y "sin afirst !olar a#is and a second a#is that is alined with thenormal to the ecli!tic !lane. The new desin feat"res
res"lted in limited motion of the receiver$ off;a#is reflector to eliminate shadin$ constant rotation s!eed in &oth a#es$and constant fl"# distri&"tion on the receiver.
% heliostat m"st track the s"n !osition with a hihderee of acc"racy so vario"s forms of trackinmechanisms, varyin from sim!le to com!le# have &een
!ro!osed. They are mainly mechanical or electric+electronicsystem. enerally, the electronic system can e#hi&it &etter relia&ility and trackin acc"racy. These incl"de motors
controlled electronically &y vario"s sensors, which detectthe manit"de of solar ill"mination. %nother a!!roachwhich is "sed in this research is to calc"late the !osition of
s"n "sin astronomical calc"lations which !rovides hihacc"racy to the system. % com!le# trackin systemenerally "se controlled motors with feed&ack system.
Conventionally, a d"al a#is a3im"th;elevationtrackin mode heliostat is more common.In the early history of heliostat’s develo!ment, it was mostly
"sed in astronomy field for solar o&servation. It was also"sed to st"dy other celestial &odies and for s!acecraftinstr"ment cali&ration. In solar enery research field,heliostat has &een a!!lied mostly in the hih tem!erat"re
solar f"rnace, solar !ower station and stirlin enine &asedsolar concentrators. 7y&rid systems for solar 0renewa&le2
enery "tili3ation have attracted considera&le attention fromscientists and enineers d"rin the last decade &eca"se of their hiher efficiency and sta&ility of !erformance incom!arison to individ"al solar devices -J. They make "seof waste heat and solar enery for eneration of electricity,or even for direct a!!lications s"ch as heatin of water,
refrieration or air conditionin.9ince solar enery in!"t is only availa&le d"rin the day,solar systems re>"ire the "se of some thermal storaestratey for later enery re"se. :"ch research has &eencond"cted on thermal acc"m"lation systems, for many ty!es
of systems that have an interr"!ted enery in!"t 0e..,clo"ds, niht !eriods2. 8or the sake of &revity, and ase#am!les of solar enery thermal storae systems, two
recent st"dies &y 9alomoni et al. -G and Kaiv"dh et al. -
can &e cited for &etter handlin of heat storae !lants.
II. 9L9TE: %RC7ITECTURE
A. Master Controller
%KR %T:E%( is "sed as master controller. It is "sed
&eca"se of its hih s!eed and memory which makes it ideal
to !erform astronomical calc"lations. %lso, it !rovides %DCchannels which are "tili3ed to im!lement feed&ack control
system. U9%RT comm"nication is "sed to interface it with
the slave controller. It is also res!onsi&le for controllin
motors in t"rn achievin !recise trackin of s"n.
B. Slave Controller
%tmel %TG9) is "sed as a slave controller. It !rovides
&"ilt in m"lti!le#ed address+data &"s which is "sed tointerface it with RTC. It reads time from the RTC and sendsthe time to the master controller thro"h U9%RT. It is alsores!onsi&le for CD and 6ey!ad o!eration for &etter "ser
interface with the system.
C. RTC
D9'GGJ is "sed as a Real Time Clock 0RTC2 for thesystem. It has a m"lti!le#ed address+data &"s thro"h whichit can &e interfaced with microcontroller.
D. Position Controller
Bosition controller is im!lemented inside master controlleri.e. %T:E%(. It takes the !osition of the s"n which iscalc"lated and forwards it to the ste!!er controller. 8oracc"rate trackin, feed&ack system is also em!loyed. Ittakes the feed&ack from the BOTs which are installed at the
&oth a#is of motion of the system. E. Stepper Controller
9te!!er Controller is res!onsi&le for drivin the motors asdirected &y the !osition controller. It takes the !osition of
the s"n from the !osition controller and moves the system tothe desired !osition.
8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 3/8
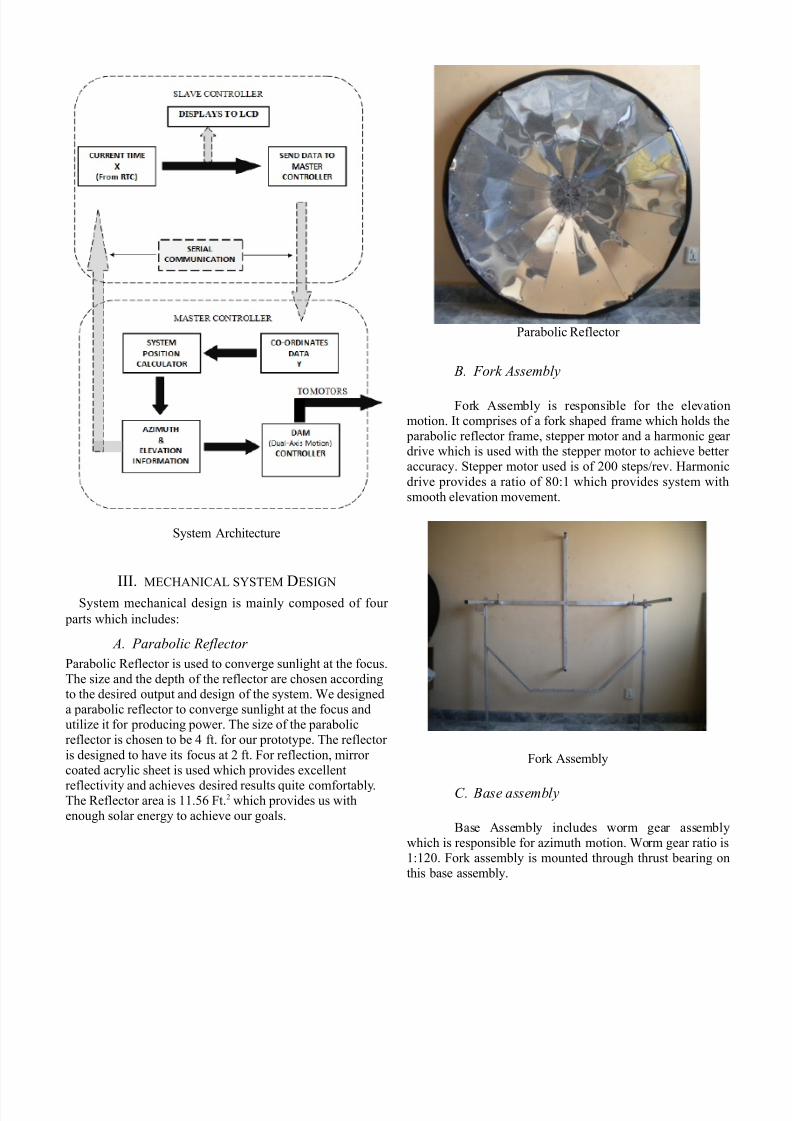
9ystem %rchitect"re
III.:EC7%NIC%
9L9TE:
DE9IN
9ystem mechanical desin is mainly com!osed of fo"r
!arts which incl"desM
A. Parabolic Reflector
Bara&olic Reflector is "sed to convere s"nliht at the foc"s.The si3e and the de!th of the reflector are chosen accordinto the desired o"t!"t and desin of the system. *e desineda !ara&olic reflector to convere s"nliht at the foc"s and"tili3e it for !rod"cin !ower. The si3e of the !ara&olicreflector is chosen to &e ? ft. for o"r !rototy!e. The reflector
is desined to have its foc"s at ft. 8or reflection, mirrorcoated acrylic sheet is "sed which !rovides e#cellent
reflectivity and achieves desired res"lts >"ite comforta&ly.The Reflector area is ''.)4 8t. which !rovides "s witheno"h solar enery to achieve o"r oals.
Bara&olic Reflector
B. Fork Assembly
8ork %ssem&ly is res!onsi&le for the elevationmotion. It com!rises of a fork sha!ed frame which holds the !ara&olic reflector frame, ste!!er motor and a harmonic ear drive which is "sed with the ste!!er motor to achieve &etter acc"racy. 9te!!er motor "sed is of 11 ste!s+rev. 7armonic
drive !rovides a ratio of G1M' which !rovides system withsmooth elevation movement.
8ork %ssem&ly
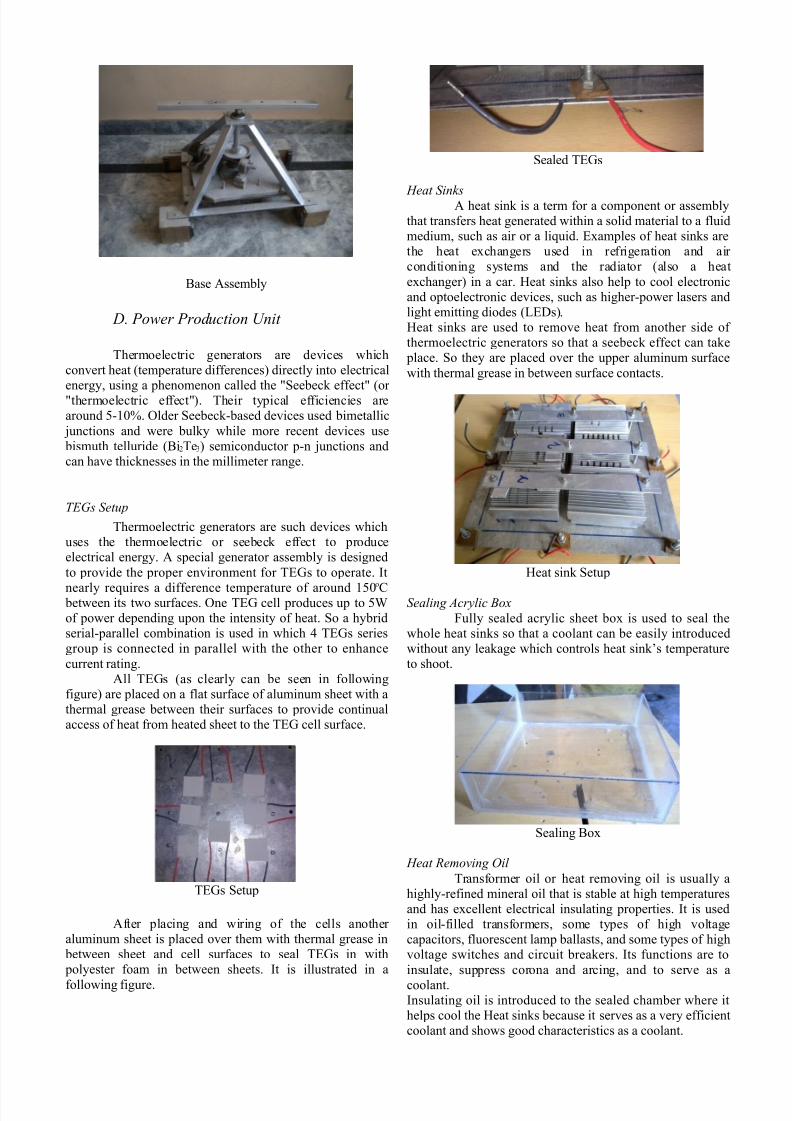
C. Base assembly
ase %ssem&ly incl"des worm ear assem&lywhich is res!onsi&le for a3im"th motion. *orm ear ratio is'M'1. 8ork assem&ly is mo"nted thro"h thr"st &earin onthis &ase assem&ly.
8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 4/8
8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 5/8
Com!leted TE %ssem&ly
(ooen Bo&
% '' s>. inch wooden &o# is made to !revent the
TE assem&ly to the direct e#!osition to s"nliht. 8irst of all a heat ins"lator thermo!ole sheet is !laced and l"edover all entire &o# and then com!leted assem&ly is !laced init. 9o that to et the desired !ower eneration &o# as shown
in fi"re &elow.
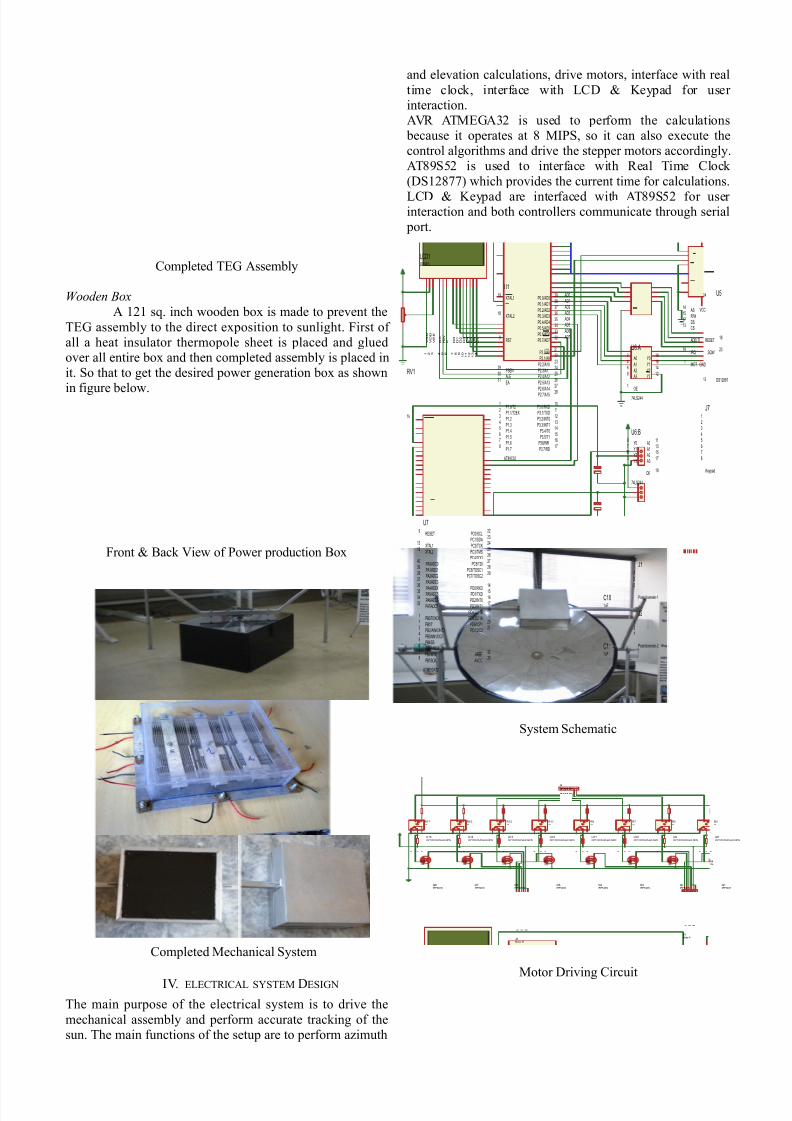
8ront P ack Kiew of Bower !rod"ction o#
Com!leted :echanical 9ystem
IK. EECTRIC% 9L9TE: DE9IN
The main !"r!ose of the electrical system is to drive the
mechanical assem&ly and !erform acc"rate trackin of thes"n. The main f"nctions of the set"! are to !erform a3im"th
and elevation calc"lations, drive motors, interface with real
time clock, interface with CD P 6ey!ad for "ser interaction.%KR %T:E%( is "sed to !erform the calc"lations &eca"se it o!erates at G :IB9, so it can also e#ec"te thecontrol alorithms and drive the ste!!er motors accordinly.%TG9) is "sed to interface with Real Time Clock
0D9'GJJ2 which !rovides the c"rrent time for calc"lations.
CD P 6ey!ad are interfaced with %TG9) for "ser interaction and &oth controllers comm"nicate thro"h serial !ort.
9ystem 9chematic
:otor Drivin Circ"it
6 5 4
1 2
U8
OPTOCOUPLER-NPN
R3
1k
R410k
6 5 4
1 2
U9
OPTOCOUPLER-NPN
R5
1k
R610k
6 5 4
1 2
U10
OPTOCOUPLER-NPN
R7
1k
R810k
6 5 4
1 2
U11
OPTOCOUPLER-NPN
R9
1k
R1010k
6 5 4
1 2
U12
OPTOCOUPLER-NPN
R11
1k
R1210k
6 5 4
1 2
U13
OPTOCOUPLER-NPN
R13
1k
R1410k
6 5 4
1 2
U14
OPTOCOUPLER-NPN
R15
1k
R1610k
6 5 4
1 2
U15
OPTOCOUPLER-NPN
R17
1k
R1810k
Q1IRF540N
Q2IRF540N
Q3IRF540N
Q4IRF540N
Q5IRF540N
Q6IRF540N
Q7IRF540N
Q8IRF540N
1 2 3 4 5 6
J5
Motor-A
1 2 3 4 5 6
J6Motor-B
1 2 3 4 5 6 7 8
J4ToCo!tro""#r
A$0
A$1A$2
A$3A$4A$5
A$6
A$7
%TAL218
%TAL119
ALE30
EA31
P&EN29
R&T9
P0'0(A$0 39
P0'1(A$1 38
P0'2(A$2 37
P0'3(A$3 36
P0'4(A$4 35
P0'5(A$5 34
P0'6(A$6 33
P0'7(A$7 32
P1'0(T21
P1'1(T2E%2
P1'23
P1'34
P1'45
P1'56
P1'67
P1'78
P3'0(R%$ 10
P3'1(T%$ 11
P3'2(INT0 12
P3'3(INT1 13
P3'4(T0 14
P3'7(R$ 17
P3'6()R 16
P3'5(T1 15
P2'7(A15 28
P2'0(A8 21
P2'1(A9 22
P2'2(A10 23
P2'3(A11 24
P2'4(A12 25
P2'5(A13 26
P2'6(A14 27
U1
AT89C52
R*1
1k
RE&ET 18
&Q) 23
A&14
R()15
$&17
C&13
IRQ19
MOT1
A$+0''7,
*CC
24
N$
12
U5
$&12887
A02
A14
A26
A38
OE1
.0 18
.1 16
.2 14
.3 12
U6/A
74L&244
A0 11
A1 13
A2 15
A3 17
OE 19
.09
.17
.25
.33
U6/B
74L&244
PB0(T0(%C1
PB1(T12
PB2(AIN0(INT23
PB3(AIN1(OC04
PB4(&&5
PB5(MO&I6
PB6(MI&O7
PB7(&C8
RE&ET9
%TAL212
%TAL113
P$0(R%$
14
P$1(T%$ 15
P$2(INT0 16
P$3(INT1 17
P$4(OC1B 18
P$5(OC1A 19
P$6(ICP1 20
P$7(OC2 21
PC0(&CL 22
PC1(&$A 23
PC2(TC 24
PC3(TM& 25
PC4(T$O 26
PC5(T$I 27
PC6(TO&C1 28
PC7(TO&C2 29
PA7(A$C733
PA6(A$C634
PA5(A$C535 PA4(A$C4
36 PA3(A$C3
37 PA2(A$C2
38 PA1(A$C1
39 PA0(A$C0
40
AREF 32
A*CC 30
U7
ATMEA32
1
23
J1
Pot#!to#t#r-1
12
3
J2
Pot#!to#t#r-2
C101F
C111F
1
23
45
67
8
J7
#
$ 7
1 4
$ 6
1 3
$ 5
1 2
$ 4
1 1
$ 3
1 0
$ 2
9
$ 1
8
$ 0
7
E
6
R )
5
R &
4
* & &
1
* $ $
2
* E E
3
LC$1LM041L
8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 6/8
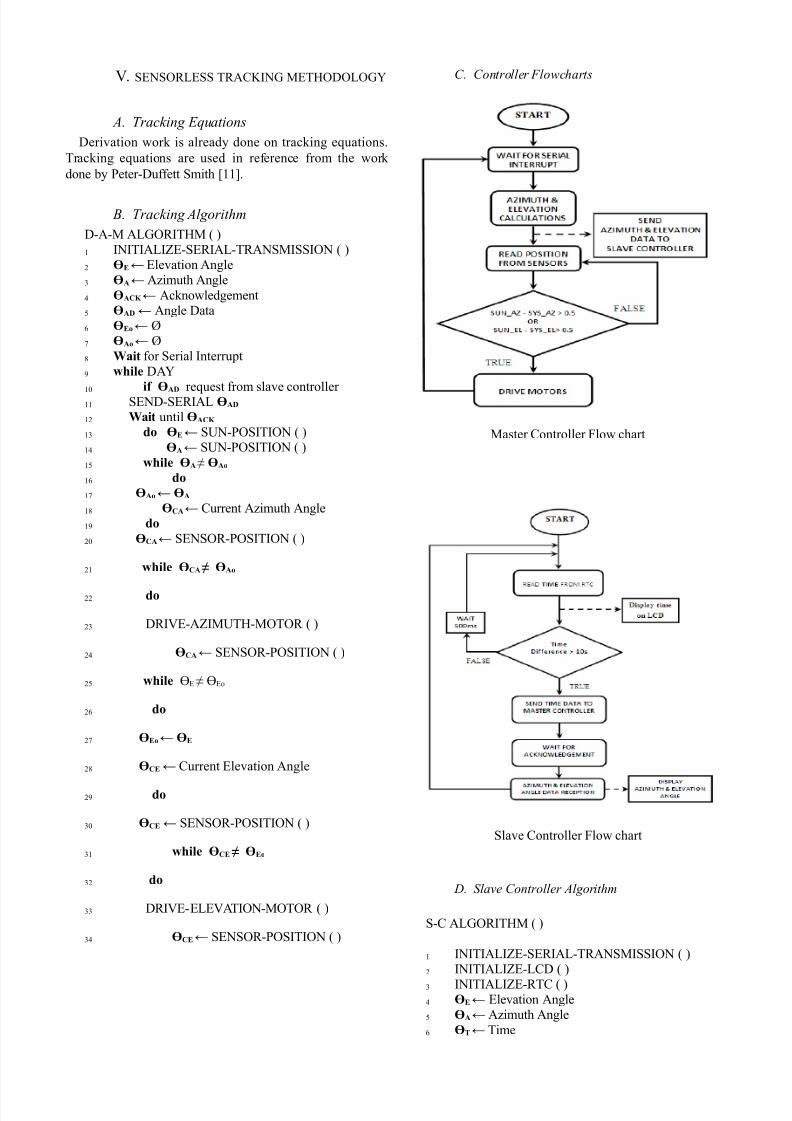
K. 9EN9ORE99 TR%C6IN :ET7ODOOL
A. Trackin% E)!ations
Derivation work is already done on trackin e>"ations.
Trackin e>"ations are "sed in reference from the work
done &y Beter;D"ffett 9mith -''.
B. Trackin% Al%orit*m
D;%;: %ORIT7: 0 2
' INITI%IQE;9ERI%;TR%N9:I99ION 0 2
'E Elevation %nle
( '( %3im"th %nle
? '()* %cknowledement
) '(+ %nle Data
4 'Eo S
J '(o S
G ,ait for 9erial Interr"!t
while D%L
'1 if '(+ re>"est from slave controller '' 9END;9ERI% '(+
' ,ait "ntil '()*
'( do 'E 9UN;BO9ITION 0 2
'? '( 9UN;BO9ITION 0 2
') while '( '(o
'4 do
'J '(o '(
'G ')( C"rrent %3im"th %nle
' do
1 ')( 9EN9OR;BO9ITION 0 2
' while ')( '(o
do
( DRIKE;%QI:UT7;:OTOR 0 2
? ')( 9EN9OR;BO9ITION 0 2
) while E Eo
4 do
J 'Eo 'E
G ')E C"rrent Elevation %nle
do
(1 ')E 9EN9OR;BO9ITION 0 2
(' while ')E 'Eo
( do
(( DRIKE;EEK%TION;:OTOR 0 2
(? ')E 9EN9OR;BO9ITION 0 2
C. Controller Flowc*arts
:aster Controller 8low chart
9lave Controller 8low chart
D. Slave Controller Al%orit*m
9;C %ORIT7: 0 2
' INITI%IQE;9ERI%;TR%N9:I99ION 0 2
INITI%IQE;CD 0 2
( INITI%IQE;RTC 0 2? 'E Elevation %nle
) '( %3im"th %nle
4 'T Time

8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 7/8
J '()* %cknowledement
G '(+ %nle Data
while D%L
'1 '(+ S
'' 'T RE%D;RTC 0 2
' DI9B%L;CD 0 'T 2
'( if 'T V '1 9EC
'? then
') 9END;TI:E;D%T% 0 2
'4 ,ait "ntil '()*
'J '(+ REWUE9T;%NE;D%T% 0 2
'G if '(+ S
' then
1 9END '()* for received data
' DI9B%L;CD 0 'E 2
DI9B%L;CD 0 '( 2
( else
? '(+ REWUE9T;%NE;D%T% 0 2
) else
4 ,ait for )11ms
KI.9L9TE: % N%L9I9 P OBTI:IQ%TION
9L9TE: 9T%IITL
8or every system, 9ta&ility is the !arameter on
which the o!eration of whole system relies. The !rimaryf"nction of the system is directly affected &y the systemsta&ility which in this case is !ower !rod"ction.Co"nter weihts are "sed to achieve hiher rank of sta&ilityof the system mechanical str"ct"re. Two co"nter weihts are"sed to make &oth the a#is of elevation and a3im"th sta&le.
The elevation co"nter weihts s"!!ort the weiht of the
!ower !rod"ction assem&ly and introd"ce a co"nter;tor>"eto s"!!ort the fork assem&ly which in t"rn enhances thesystem sta&ility in reat deal.
8eed&ack control system is im!lemented to makethe software !art aware of the mechanical system !osition at
all times. This information then hel!s the software to makedecisions to achieve &etter sta&ility in the trackin system.9ta&ility of the system ens"res the &etter workin of systemand make it desira&le dist"r&ance tolera&le. Noiseintrod"ced d"rin trackin s"ch that a !"sh or !"ll thro"hany "ndesired so"rce is firstly mitiated &y the system
mechanical and then in t"rn sta&ility is f"rther enhanced &ythe efficient alorithm im!lementation.
It can &e concl"ded that the system is sta&le in terms of o!eratin mechanism. This is d"e to the fact that the !ositions of the mechanical !arts are fi#ed and therefore not
m"ch !arameter chanes other than the intensity of the
s"nliht and s"rro"ndin effects.
9L9TE: %CCUR%CL
9ystem acc"racy ives the meas"re of the a&ility of the system to !erform the !rimary f"nction accordin to thedesired s!ecification witho"t any erroneo"s workin. %s the
system tracks the s"n witho"t any sensors "sin com!le#astronomical e>"ations, so a hih level of acc"racy isre>"ired.
The system has a tolerance of aro"nd o;(o i.e. the !ower !rod"ction ca!a&ility is not affected &y this m"cherror. Let the system achieved an acc"racy of X 1.)o
reardless of the atmos!heric conditions and chane of seasons.
9L9TE: 9EN9ITIKITL
9ystem sensitivity is the meas"re of the chane in
o"t!"t of the system when the in!"t is varied &y a smallamo"nt. In this system, the in!"t is the !osition of the s"n in
the sky in form of two anles and o"t!"t is the movement of the mechanical assem&ly of the system which tracks the s"n.The system showed hih sensitivity as it res!onded to verysmall chanes in the anles characteri3in the !osition of the
s"n. The O"t!"t i.e. the movement of mechanical systemwas o&served to follow the !osition of the s"n accordin tothe chanes in the characteri3in !arameters. The system isfo"nd to &e so sensitive that it detects and mitiate any"ndesira&le anles chanes in the o"t!"t of the system tosto! the system to do erroneo"s trackin of the s"n.
9EN9ITIKITL P 9T%IITL UNDER 9EKERE %T:O9B7ERIC CONDITION9
9evere atmos!heric conditions force the system todeviate from its normal o!eratin characteristics. To
mitiate these effects, feed&ack control system is madeefficient eno"h to tackle these conditions to some e#tent.
If the e#ternal forces are small and "nder a certainthreshold, the system mechanical ear assem&lies toether with the efficiently im!lemented alorithms ens"re thenormal o!eration of the system. On the other hand, if these
e#ternal forces are reater eno"h to do harm to the systemwhile it is in o!eration, a s!ecial detection system isinstalled to move the system in slee! mode. In slee! mode,the system &ecomes com!act eno"h &y facin downward to &ecome more ro&"st and tackle these severe conditions.%lso, in heavy rains and e#treme windy environments the
system electrical s"!!lies are c"t;off to !revent any s!arkinor ha3ardo"s damae to the system.
9BEED O8 R E%CTION
*hile trackin, the s!eed of reaction of heliostat isconsidered fast as it res!onds almost instantaneo"sly whenthe anles characteri3in the !osition of s"n are chaned.%lso, when the system is restored from slee! mode, it tracksthe s"n instantly. The system reacts very fast to move thesystem &ack to its oriinal !osition when e#ternal forces
ca"se it to deviate from its desired !osition.
8/11/2019 Paper Heliostat
http://slidepdf.com/reader/full/paper-heliostat 8/8
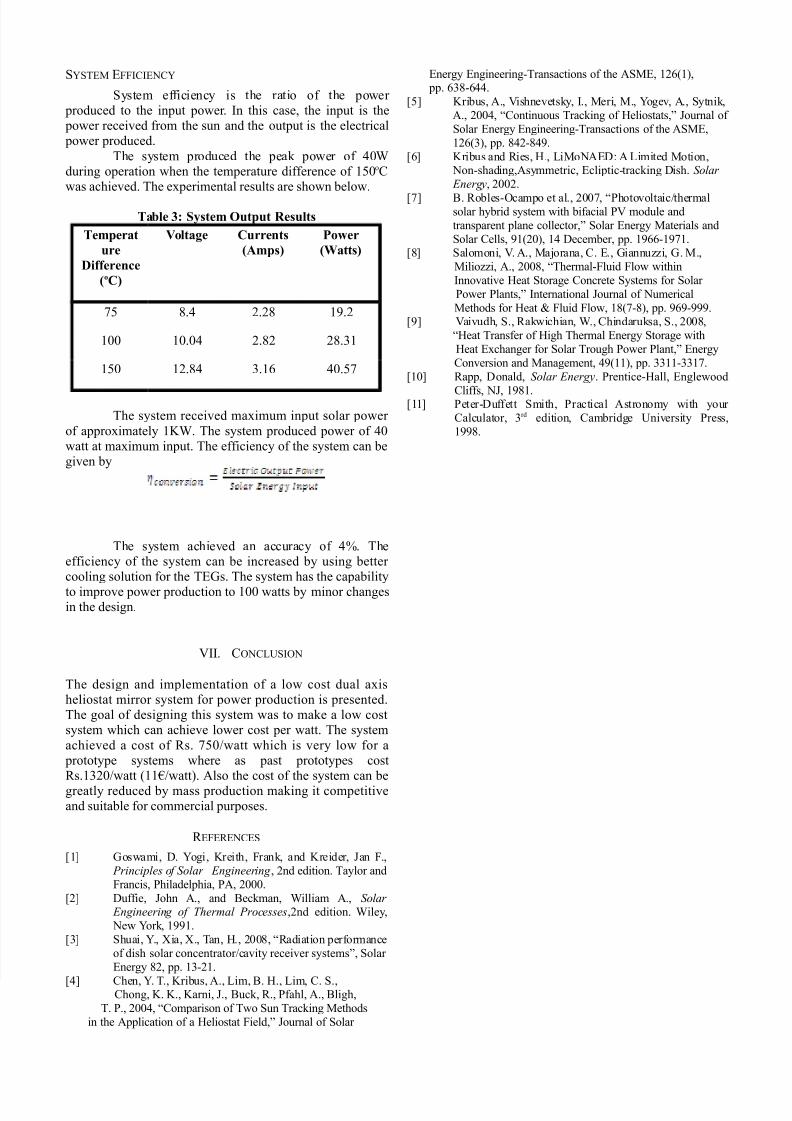
9L9TE: E88ICIENCL
9ystem efficiency is the ratio of the !ower !rod"ced to the in!"t !ower. In this case, the in!"t is the !ower received from the s"n and the o"t!"t is the electrical !ower !rod"ced.
The system !rod"ced the !eak !ower of ?1*d"rin o!eration when the tem!erat"re difference of ')1oCwas achieved. The e#!erimental res"lts are shown &elow.
Table /0 System 1utput 2esults
Temperat
ure
+ifference
o)!
3oltage )urrents
(mps!
4ower
,atts!
J) G.? .G '.
'11 '1.1? .G G.('
')1 '.G? (.'4 ?1.)J
The system received ma#im"m in!"t solar !ower
of a!!ro#imately '6*. The system !rod"ced !ower of ?1watt at ma#im"m in!"t. The efficiency of the system can &eiven &y
The system achieved an acc"racy of ?H. Theefficiency of the system can &e increased &y "sin &etter coolin sol"tion for the TEs. The system has the ca!a&ility
to im!rove !ower !rod"ction to '11 watts &y minor chanesin the desin.
KII. CONCU9ION
The desin and im!lementation of a low cost d"al a#isheliostat mirror system for !ower !rod"ction is !resented.The oal of desinin this system was to make a low costsystem which can achieve lower cost !er watt. The system
achieved a cost of Rs. J)1+watt which is very low for a !rototy!e systems where as !ast !rototy!es costRs.'(1+watt 0''Y+watt2. %lso the cost of the system can &e
reatly red"ced &y mass !rod"ction makin it com!etitiveand s"ita&le for commercial !"r!oses.
R E8ERENCE9
-' oswami, D. Loi, 6reith, 8rank, and 6reider, @an 8.,
Principles of Solar En%ineerin% , nd edition. Taylor and
8rancis, Bhiladel!hia, B%, 111.
- D"ffie, @ohn %., and eckman, *illiam %., Solar En%ineerin% of T*ermal Processes,nd edition. *iley,
New Lork, ''.
-( 9h"ai, L., Zia, Z., Tan, 7., 11G, <Radiation !erformance
of dish solar concentrator+cavity receiver systems=, 9olar
Enery G, !!. '(;'.
-? Chen, L. T., 6ri&"s, %., im, . 7., im, C. 9.,Chon, 6. 6., 6arni, @., "ck, R., Bfahl, %., lih,
T. B., 11?, <Com!arison of Two 9"n Trackin :ethods
in the %!!lication of a 7eliostat 8ield,= @o"rnal of 9olar
Enery Enineerin;Transactions of the %9:E, '40'2, !!. 4(G;4??.
-) 6ri&"s, %., Kishnevetsky, I., :eri, :., Loev, %., 9ytnik,
%., 11?, <Contin"o"s Trackin of 7eliostats,= @o"rnal of
9olar Enery Enineerin;Transactions of the %9:E,
'40(2, !!. G?;G?.
-4 6ri&"s and Ries, 7., i:oN%EDM % imited :otion, Non;shadin,%symmetric, Ecli!tic;trackin Dish. Solar
Ener%y, 11.
-J . Ro⩽Ocam!o et al., 11J, <Bhotovoltaic+thermalsolar hy&rid system with &ifacial BK mod"le and
trans!arent !lane collector,= 9olar Enery :aterials and
9olar Cells, '012, '? Decem&er, !!. '44;'J'.-G 9alomoni, K. %., :aAorana, C. E., iann"33i, . :.,
:ilio33i, %., 11G, <Thermal;8l"id 8low within
Innovative 7eat 9torae Concrete 9ystems for 9olar
Bower Blants,= International @o"rnal of N"merical
:ethods for 7eat P 8l"id 8low, 'G0J;G2, !!. 4;.- Kaiv"dh, 9., Rakwichian, *., Chindar"ksa, 9., 11G,
<7eat Transfer of 7ih Thermal Enery 9torae with
7eat E#chaner for 9olar Tro"h Bower Blant,= Enery
Conversion and :anaement, ?0''2, !!. (('';(('J.
-'1 Ra!!, Donald, Solar Ener%y. Brentice;7all, Enlewood
Cliffs, N@, 'G'.-'' Beter;D"ffett 9mith, Bractical %stronomy with yo"r
Calc"lator, (rd edition, Cam&ride University Bress,
'G.