Optimization of the ship movement trajectory in the...
7
116 Scientific Journals 18(90) Scientific Journals Zeszyty Naukowe Maritime University of Szczecin Akademia Morska w Szczecinie 2009, 18(90) pp. 116–122 2009, 18(90) s. 116–122 Optimization of the ship movement trajectory in the navigational decision support system Optymalizacja trajektorii ruchu statków w nawigacyjnych systemach wspomagania decyzji Zbigniew Pietrzykowski, Janusz Magaj Akademia Morska w Szczecinie, Wydział Nawigacyjny, Instytut Nawigacji Mor skiej 70-500 Szczecin, ul. Wały Chrobrego 1–2 Key words: decision support, optimization of ship movement trajectory, safety of navigation Abstract Ship collisions belong to major hazards to the safety of navigation. This article presents a prototype navigational decision support system aimed at assisting the navigator in the process of ship conduct. The problem of choosing the right track in ship encounter situations and optimization criteria are considered. The authors present algorithms for the optimization of ship‟s route in collision situations, implemented in the navigational decision support system being developed. The description of the system operation intended to determine optimized ship movement trajectories is based on simulated ship encounters. Słowa kluczowe: wspomaganie decyzji, optymalizacja trajektorii ruchu statków, bezpieczeństwo nawigacji Abstrakt Kolizje statków należą do największych zagrożeń bezpieczeństwa nawigacji. W artykule przedstawiono pro- totyp systemu wspomagania decyzji nawigacyjnych, mającego na celu wspieranie nawigatora w procesie ki e- rowania statkiem. Rozważono również problem wyboru właściwej trasy statku w sytuacjach spotkaniowych, jak i kryteria optymalizacji trasy. Autorzy zaprezentowali algorytm optymalizacji trasy statku w sytuacjach kolizyjnych, realizowany w nawigacyjnym systemie wspomagania decyzji. Opis funkcjonowania systemu, mającego na celu ustalenia zoptymalizowanej trajektorii ruchu statku, oparty został na symulowanych spo- tkaniach statków. Formulation of the problem Shipboard navigational equipment and systems supply information that helps the navigator to take decisions in the process of ship conduct. Electronic navigation charts (ENC) are commonly used for displaying navigational situations and related information. These are data bases with standardized contents, structure and format, containing all chart information needed for navigation to be safe. The ENC is part of the Electronic Chart Display and Information System (ECDIS). The latter is a navigational information system enabling a display of selected information from the ENC incorporated in the system plus data from other navigational devices and systems. The design and implementation of navigational decision support systems is a new major step in developing information systems on board ships, an aid to the navigator responsible for safe ship conduct. These systems, apart from supplying information, perform other functions connected with solving navigational situations by generating solutions and proposing them to the navigator. One such function is the determination of a safe ship movement trajectory in the process of collision avoidance. The problem of choosing the right route in collision situations requires that a number of partial tasks should be solved. These include: situation analysis and assessment, and the determination of a ship trajectory that will ensure the safe passing
-
Upload
vuongkhanh -
Category
Documents
-
view
217 -
download
4
Transcript of Optimization of the ship movement trajectory in the...

116 Scientific Journals 18(90)
Scientific Journals Zeszyty Naukowe Maritime University of Szczecin Akademia Morska w Szczecinie
2009, 18(90) pp. 116–122 2009, 18(90) s. 116–122
Optimization of the ship movement trajectory in the navigational decision support system
Optymalizacja trajektorii ruchu statków w nawigacyjnych systemach wspomagania decyzji
Zbigniew Pietrzykowski, Janusz Magaj
Akademia Morska w Szczecinie, Wydział Nawigacyjny, Instytut Nawigacji Morskiej 70-500 Szczecin, ul. Wały Chrobrego 1–2
Key words: decision support, optimization of ship movement trajectory, safety of navigation
Abstract Ship collisions belong to major hazards to the safety of navigation. This article presents a prototype
navigational decision support system aimed at assisting the navigator in the process of ship conduct.
The problem of choosing the right track in ship encounter situations and optimization criteria are considered.
The authors present algorithms for the optimization of ship‟s route in collision situations, implemented in the
navigational decision support system being developed. The description of the system operation intended to
determine optimized ship movement trajectories is based on simulated ship encounters.
Słowa kluczowe: wspomaganie decyzji, optymalizacja trajektorii ruchu statków, bezpieczeństwo nawigacji
Abstrakt Kolizje statków należą do największych zagrożeń bezpieczeństwa nawigacji. W artykule przedstawiono pro-
totyp systemu wspomagania decyzji nawigacyjnych, mającego na celu wspieranie nawigatora w procesie kie-
rowania statkiem. Rozważono również problem wyboru właściwej trasy statku w sytuacjach spotkaniowych,
jak i kryteria optymalizacji trasy. Autorzy zaprezentowali algorytm optymalizacji trasy statku w sytuacjach
kolizyjnych, realizowany w nawigacyjnym systemie wspomagania decyzji. Opis funkcjonowania systemu,
mającego na celu ustalenia zoptymalizowanej trajektorii ruchu statku, oparty został na symulowanych spo-
tkaniach statków.
Formulation of the problem
Shipboard navigational equipment and systems
supply information that helps the navigator to take
decisions in the process of ship conduct. Electronic
navigation charts (ENC) are commonly used for
displaying navigational situations and related
information. These are data bases with standardized
contents, structure and format, containing all chart
information needed for navigation to be safe. The
ENC is part of the Electronic Chart Display and
Information System (ECDIS). The latter is a
navigational information system enabling a display
of selected information from the ENC incorporated
in the system plus data from other navigational
devices and systems.
The design and implementation of navigational
decision support systems is a new major step in
developing information systems on board ships, an
aid to the navigator responsible for safe ship
conduct. These systems, apart from supplying
information, perform other functions connected
with solving navigational situations by generating
solutions and proposing them to the navigator. One
such function is the determination of a safe ship
movement trajectory in the process of collision
avoidance.
The problem of choosing the right route in
collision situations requires that a number of partial
tasks should be solved. These include: situation
analysis and assessment, and the determination
of a ship trajectory that will ensure the safe passing

Optimization of the ship movement trajectory in the navigational decision support system
Zeszyty Naukowe 18(90) 117
of a vessel or vessels. The latter task is an example
of optimization problems. Its constraints are due
to the specific character of the area, ship‟s
manoeuvrability, regulations in force and other
factors. It is also important to take account of safety
criteria as well as economy-based criteria that
navigators apply while choosing the right route.
tasks of the navigational decision support system
The basic tasks of the navigational decision
support system are as follows: automatic acquisi-
tion and distribution of navigational information,
analysis of the navigational situation, solving
a collision situation and interaction with the
navigator.
In particular, the system should enable:
acquisition, fusion and integration of naviga-
tional data available on board,
display of a navigational situation,
analysis of the navigational situation taking
account of navigators‟ criteria,
signalling dangerous situations and showing the
current level of navigational safety,
planning a manoeuvre or manoeuvres and
movement trajectory in collision situations,
display of the proposed manoeuvre or
manoeuvres,
possibility of explaining (justifying) the deve-
loped solution.
The system should also store data for future
reproduction and analysis of ship movement
processes.
The systems in question are real time systems.
Their task is to observe the vessel and the
environment, register navigational information,
select, extract, verify and process that information.
The processed information presented to the navigator
concerns the identification and assessment of
a navigational situation and the proposed solutions
(decisions) ensuring safe navigation.
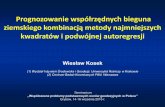
The general architecture of the navigational
decision support system developed by a team of the
Maritime University of Szczecin [1] is shown in
figure 1.
The key functions of the system are the
acquisition and distribution of navigational infor-
mation, analysis and assessment of a navigational
situation, solving collision situations and inter-
action with the navigator.
Information on the parameters of navigator‟s
own ship movement and that of other vessels is
fundamental for effective solutions to collision
situations. With this objective in view, algorithms
for navigational data acquisition, selection and
integration have been developed. The range and
accuracy of this information is of vital importance
for the navigator (situation assessment for making
decisions), and for the automatic process of solving
collision situations, i.e. optimization of the ship
movement trajectory.
Optimization of ship movement trajectory in a collision situation
How to alter the ship‟s course, especially when
a collision has to be avoided, can be presented as an
optimization problem [2]. The following steps have
to be made to formulate an optimization problem:
establish the problem parameters,
establish decision variables,
define limitations to an acceptable solution,
formulate the function of the criterion (objective
function) for the achievement of the objective.
The problem can be considered as a single- or
multi-stage control. In the former case the problem
comes down to a single choice that takes account of
preset criteria for the selection of ship‟s route. For
instance, the course alteration may be such that
other vessels will be passed at a preset safe distance
and the increased route length or time will be
minimized. This problem can be expressed with
this relation:
DF(X):X)F(X max (1)
where:
D – set of acceptable solutions of the optimi-
zation problem,
Fig. 1. Architecture of the navigational support system of a sea
going vessel
Rys. 1. Architektura systemu wspomagania decyzji nawigacyj-
nych na statku morskim

Zbigniew Pietrzykowski, Janusz Magaj
118 Scientific Journals 18(90)
X – solution,
X*
– optimized solution.
F – objective function (criterion).
As to the multi-stage control problem, the
optimization task consists in finding such a control
function tu
, determining the optimal trajectory
tx
, that the quality functional J should assume
the minimum value:
kt
tXtx,Utu
tt,tu,txfttu,txJ
0
00
dmin, 0 (2)
where
f0 – function of instantaneous losses,
u(t) U0 – set of acceptable control settings,
x(t) X0 – allowable trajectory space.
The problem may be aimed at establishing the
optimal trajectory by defining ship‟s turn points and
headings to proceed along the sections set by the
turn points or rudder and/or engine settings at
chosen moments of time.
In both cases the formulation of route choice
criteria is essential.
Criteria of the choice of route
The trajectory defined by the navigator and
related manoeuvres have to be effective, lawful [3],
timely and noticeable. The manoeuvres should be
feasible and should satisfy economical criteria such
as the minimum route and time lengthening and
fuel consumption.
The effective manoeuvre is one that puts the
ship on a trajectory enabling safe passing of
obstructions and navigational dangers.
The timely and noticeable manoeuvre means the
ship is being steered in a manner allowing other
traffic participants to take notice of it, assess the
manoeuvre effectiveness and will not force the
vessels in vicinity to take extra actions, which may
be induced by a late manoeuvre or insignificant
alterations of ship‟s course or speed the other
navigators will fail to notice.
The possibility of a given manoeuvre to be
performed depends on the allowable range of
control variables, ship‟s manoeuvrability and
present values of the ship state vector.
The economical aspect of the manoeuvre trans-
lates into the minimization of costs related with the
mentioned lengthened route and time, fuel, etc.
As to the criteria of safety assessment – how
safe it is to pass other vessels or objects – the
following can be distinguished [2]:
closest point of approach CPAL and time to the
closest point of approach TCPAL,
ship domain,
safety/risk level indicators.
CPAL is a widely used criterion for navigational
situation assessment, implemented in automatic
radar plotting aid (ARPA). The criterion assumes
that the navigator defines a minimum, i.e. safe
distance, at which other vessels or objects will pass
(CPAL). An additional criterion – TCPA – its
minimum value to be exact, is also defined by the
navigator.
The ship„s domain is an area around the vessel
that the navigator should keep clear of other
objects. Another ship‟s entry into the danger zone –
ship domain – is interpreted as a threat to
navigational safety [4]. Two- and three-dimensional
domains are proposed in the literature on the
subject. The former, describing an area around the
ship, may have various shapes: circle, rectangle,
ellipsis, polygon or more complex planar figures.
There are criteria incorporating at the same time
the two quantities: CPAL and TCPAL. One example
is the risk level indicator known as Kearon
coefficient.
It is possible to take into account uncertainties in
the safety assessment by using, e.g. fuzzy logic,
which enables expressing the safety level in
linguistic terms used by the human: „safe‟, „barely
safe‟, „dangerous‟ etc. Crisp values, e.g. the
measured distance x are attributed a degree of
membership (x) 0, 1. This means that apart
from the membership (1) or lack of membership
(0), as set forth in the classical sets theory, there
may exist partial membership. This includes the
fuzzy closest point of approach and ship fuzzy
domain.
The former of the fuzzy criteria of safety
assessment implies that a tolerance interval is
accepted CPALmin, CPALmax (CPALmin CPAL
CPALmax), and any CPA value is attributed its
degree of membership to the set „fuzzy closest
point of approach‟. The ship fuzzy domain is
similarly interpreted.
Both the fuzzy CPA and ship fuzzy domain are
criteria incorporating imprecise judgment characte-
ristic of the human.
According to commonly adopted principles of
good sea practice the moment of starting a collision
avoiding manoeuvre is defined on the basis of the
ship encounter phase or/and TCPAL. In the former
case it is the interval of distance to another vessel
(object) within which action (manoeuvre) should be
taken. The navigator may also define the moment

Optimization of the ship movement trajectory in the navigational decision support system
Zeszyty Naukowe 18(90) 119
of starting the manoeuvre as the TCPALmin by
specifying the minimum time to the closest point of
approach. While deciding on the moment of
starting the manoeuvre the navigator has to allow
for the time in which the ship responds (e.g. course
alteration or speed reduction). The criterion for the
timely manoeuvre performance can also be
described using the tools of the fuzzy sets theory.
The criterion of noticeable manoeuvre can be
formulated as follows: when the course is altered, it
is recommended that the change could be visible to
others. This means that the course alteration should
be possibly close to the suggested one, recom-
mended by experienced navigators and stated in the
literature on ship manoeuvring. The above criterion
can be described, like the fuzzy CPA and ship
fuzzy domain, using the fuzzy sets theory.
Lengthened route. Most frequently, in
optimization problems concerning the choice of
route such factors as lengthening of the track and
time, fuel etc. make up an element of the objective
function (quality indicator) and are minimized. The
lengthened route can also be described using the
value of shift from the original trajectory.
Assuming that the minimum and maximum
trajectory shifts accepted by the navigator are
known, we can describe the lengthened route using
a relevant membership function of the fuzzy set.
The presented criteria may be applied in
optimization problems of ship movement trajectory
in the process of single or multiple decision making
(single- and multi-stage control).
Multi-stage control
Dynamic programming is one of the standard
methods of dynamic optimization, used in multi-
stage problems of decision making and control.
The optimal ship control in terms of an
established control quality indicator is determined
using Bellman principle of optimality. The
principle defines the fundamental property of
optimal policy, which says that regardless of the
initial state and initial decision, the remaining
decisions must constitute an optimal policy with
regard to the state resulting from the first decision.
Consequently, the calculations start from the final
stage and follow backward to the initial stage. It has
been proved [5] that the process of ship collision
avoidance satisfied the duality conditions,
therefore, using the optimality principle we can
commence calculations from the initial stage and
continue to the final stage.
For a given finite space of states X = {x1, ... xn}
and finite space of control settings U ={u1, ... um},
transitions of states in subsequent k stages of
control are determined by this function:
f: X U X (3)
such that:
),(1 iii ttt uxfx
, i = 0, 1, 2, …, k–1 (4)
The equations of state transitions then have this
form:
12100
11
100112
001
,
,
,,
,
kk
kkk
ttttt
ttt
tttttt
ttt
u...,uu,uxf.....ff
uxfx.....................................................
u,uxffuxfx
uxfx
(5)
Attempting at the possible least lengthening of
track with a vessel proceeding at constant speed,
may be a control quality indicator (optimality
criterion), yielding the time-optimal control.
The area of collision risk is assumed to be
a safety criterion. The above constraints imposed
on state variables (safety criterion, COLREGs) and
control settings are taken into account by checking
whether the state variable has not exceeded the
constraints at each considered node r by rejecting
the nodes where excess values have been detected.
Accounting for the constraints we can determine
allowable control settings (U0) and allowable states
(X0).
For instance, the quality indicator (2) in the
route minimization problem will assume this form:
1
0,
1,min,,00
k
iXtxUtu
iidttutxJ (6)
where:
u(t) – set of allowable control settings,
x(t) – allowable trajectory space,
d(i, i+1) – track covered while transiting from
state itx to state
1itx
tx
– optimal trajectory,
tu
– control strategy, defining the opti-
mal trajectory.
The control strategy, determining the optimal
trajectory consists of a series of control settings:
110,...,,
kttt uuuu (7)
Respectively, the starting point is adopted to be
the ship‟s current position described by its state
vector, while the final point is:
fixed final point of the trajectory (control with
the fixed final point), mostly in restricted areas,

Zbigniew Pietrzykowski, Janusz Magaj
120 Scientific Journals 18(90)
fixed final course typically corresponding to the
original course, mostly in open sea areas.
The above problem can be solved by dynamic
programming methods, the bound-and-branch
method or using the graph theory tools [6].
Multi-stage control in a fuzzy environment
In consideration of the fact that there occur
inaccuracies and uncertainties (imprecisions) in
defining the goals and constraints in the problem of
choosing the optimal trajectory of ship movement
in real conditions, we can choose the multi-stage
decision making (control) in a fuzzy environment
[7] as an alternative to the classical approach of
dynamic optimization.
The concept of fuzzy environment is understood
as the ordered four G,C,D,U (G – fuzzy goal, C –
fuzzy constraints, D – fuzzy decision, U – set of
decisions) [8]. The fuzzy goal is defined as a fuzzy
set G U with the membership function G:
R,UX:μG 10 (8)
and the fuzzy constraint is a fuzzy set C U with
the membership function C:
R,UX:μC 10 (9)
For a given finite space of states X = {x1, ... xn}
and a finite space of control settings U ={u1, ... um}
the state transitions in subsequent control stages k
are determined by the function (4), (5).
In the case of decision making in a fuzzy
environment, i.e. with the constraint C and goal G,
described, respectively, by the membership func-
tions C(x) and G(x) the fuzzy decision D is found
from this relationship:
))(),((min)( xxx CGXx
D
(10)
It is assumed that the optimal decision is
a decision maximizing the degree of membership in
the set of fuzzy decision D:
))((max)( * xx DXx
D
(11)
This also applies to a situation where many
goals and many constraints exist. Then the fuzzy
decision is defined as:
)(.....)()(
)(.....)()()(
21
21
xxx
xxxx
CpCC
GsGGD
(12)
where:
p – number of goals,
s – number of constraints.
The control process for the space of states X and
of control settings U consists in selecting control
settings u with imposed constraints C(x), while the
states x have imposed goals G(x) in each control
stage. The process quality indicator of the multi-
stage decision making (control) for k control stages
is assumed to be the fuzzy decision [5]:
kkt GCGCGCxD 12110)(0
(13)
described by membership functions:
)()(
...)()()...,,(
1
10010
1
10
kk
k
tGktCk
tGtCtttD
xu
xuxuu
(14)
The obtained states kttt xxx ...,,,
21 are determined
by the subsequent application of the equations of
state transitions (5).
The problem of multi-stage control in a fuzzy
environment is formulated as follows:
010010
...,,max...,, tttDtttD xuuxuukk
(15)
Then the optimal strategy makes up a series of
control settings u*:
)...,,,(****
110
kttt uuuu (16)
Like in the multi-stage control discussed in
Chapter 5, the above problem can be solved by
dynamic programming methods, by the branch and
bound method, or by using the graph theory.
The trajectory optimization in the navigational decision support system
The algorithm for the determination of safe ship
movement trajectory, as presented in Chapter 3, has
been implemented as a module in the navigational
decision support system (see Chapter 2). The
module operates using data from data acquisition
and integration modules (positions, courses and
speeds of own and other ships). The system data,
formulated by the navigator, make up a separate
group. These data include, among others, current
visibility conditions, criteria of navigational
situation assessment, navigator‟s preferences
concerning the choice of optimization algorithm,
constraints connected with economical criteria of
the choice of route (extended track and time), as
well as the time Top of starting the manoeuvre,
enabling the navigator taking a decision and
performing (starting) the manouevre.
The optimization results – proposed safe
trajectories – are presented graphically on the
operator‟s/navigator‟s interface screen. An ENC is

Optimization of the ship movement trajectory in the navigational decision support system
Zeszyty Naukowe 18(90) 121
employed for the visualization of the situation and
proposed solutions. The display on the navigational
chart includes one trajectory described by the turn
points with their positions, times to reach these
points and courses required to proceed along the
determined trajectory. The navigator sees the
trajectory that is in compliance with international
collision regulations. The functionality of the chart
allows, on navigator‟s request, to display other
acceptable trajectories that the system works out.
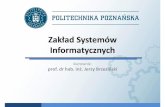
Figure 2 shows a navigational situation in the
form it is presented to the navigator on an ENC.
According to the regulations, the navigator‟s ship
(in good visibility conditions) is obliged to give
way to the ship on the starboard beam. The
suggested manoeuvre may threaten the other ships,
in relation to which the first ship has the right of
way. The safe trajectory has been determined by the
multi-stage control method for the preset
CPAL = 0.5 Nm.
Fig. 2. Ship encounter situation no 1; multi-stage control;
Top = 60 s; CPAL = 0.5 Nm
Rys. 2. Sytuacja spotkaniowa statków nr 1; kontrola wieloeta-
powa – multistage control; Top = 60 s, CPAL = 0,5 Mm
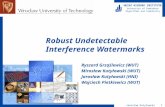
Figure 3 shows a ship movement trajectory
determined by the method of multi-stage control in
a fuzzy environment. The solution takes account of
the tolerance interval for the CPA value, described
by function of membership to the fuzzy set of safe
CPA.
Fig. 3. Ship encounter situation no 1; multi-stage control
in fuzzy environment; Top = 60 s, CPALmin = 0.5 Nm,
CPALmax = 3 Nm
Rys. 3. Sytuacja spotkaniowa statków nr 1; kontrola wieloeta-
powa w środowisku rozmytym; Top = 6 s, CPAL = 0,5 Mm,
CPAlmax = 3 Mm
Under the regulations in force, the navigator‟s
ship should perform a manoeuvre to starboard or
alter speed. If such a solution does not exist, the
system releases such information and proposes to
change the criteria for choosing a new route or to
consider a manoeuvre to port (fig. 4 ).
Fig. 4. Ship encounter situation no 2; multi-stage control;
Top = 180 s, CPALmin = 1 Nm, CPALmax =3 Nm
Rys. 4. Sytuacja spotkaniowa nr 2; kontrola wieloetapowa;
Top = 180 s, CPALmin = 1 Mm, CPALmax = 3 Mm
The change of parameters describing navigator‟s
preferences in the process of defining a safe
trajectory will start computational procedures (figs.
5 and 6).
Fig. 5. Ship encounter situation no 3; multi-stage control in
fuzzy environment; Top = 180 s, CPALmin = 0.5 Nm,
CPALmax =3 Nm
Rys. 5. Sytuacja spotkaniowa nr 3; kontrola wieloetapowa
w środowisku rozmytym; Top = 180 s, CPALmin = 0,5 Mn,
CPALmax = 3 Mm
Fig. 6. Ship encounter situation no 4; multi-stage control
in fuzzy environment; Top = 60 s, CPALmin =1 Nm,
CPALmax = 3 Nm
Rys. 6. Sytuacja spotkaniowa nr 4; kontrola wieloetapowa
w środowisku rozmytym; Top = 60 s, CPALmin = 1 Mm,
CPALmax = 3 Mm

Zbigniew Pietrzykowski, Janusz Magaj
122 Scientific Journals 18(90)
Summary
Avoiding collision situations has been
considered as one of the most important
navigational functions of the decision support
system, besides the acquisition and distribution of
navigational information, analysis and assessment
of navigational situations, and interaction with the
navigator.
The problem of the choice of route in ship
encounters is presented as an optimization problem.
The relevant criteria of the choice of route have
been characterized. Then two types of algorithms
for ship route optimization in collision situations
have been presented: multi-stage control and multi-
stage control in a fuzzy environment.
The latter algorithm provides an alternative
to the classical approach of dynamic optimization.
It takes account of typically human inaccuracies
and uncertainties in formulating goals and
constraints. The algorithm enables finding a solu-
tion which compromises contradictory goals
occurring in an optimization problem.
Based on the mentioned algorithms, the
discussed navigational decision support system has
proved operational providing safe optimized
trajectories in selected ship encounter situations.
References
1. PIETRZYKOWSKI Z., MAGAJ J., CHOMSKI J.: Model of
navigational decision support system on a sea-going vessel
m. Scientific papers AM Szczecin no. 13(85), Szczecin
2008, 65–73.
2. PIETRZYKOWSKI Z.: Modelling of Decision Processes in
Sea-Going Ship Movement Control. Studies No 43,
Maritime University of Szczecin, 2004.
3. COLREGs 1972, Convention on the International
Regulations for Preventing Collisions at Sea, International
Maritime Organization.
4. PIETRZYKOWSKI Z., URIASZ J.: The ship domain – a
criterion of navigational safety assessment in an open sea
area. The Journal of Navigation, 62, The Royal Institute of
Navigation, Cambridge 2009, 93–108.
5. PIETRZYKOWSKI Z.: Fuzzy Control in Solving collision
Situations at Sea, Computational Intelligence: Methods and
Applications. Eds. L. Rutkowski, R. Tadeusiewicz, L.A.
Zadeh, J. Żurada, AOW EXIT, Warszawa 2008, 103–111.
6. DEO N.: The Theory of Graphs and its Application in
Technology and Computer Science. PWN, Warszawa
1980.
7. KACPRZYK J.: Multi-stage fuzzy control. WNT, Warszawa
2001.
8. BELLMAN R.E., ZADEH L.A.: Decision making in a fuzzy
environment. Management Science, No 17, 1970.
Recenzent:
prof. dr hab. inż. Bolesław Mazurkiewicz
Akademia Morska w Szczecinie