OCENA RYZYKA I ZARZ DZANIE BEZPIECZEŃSTWEM W … · katastrofy na morzu należy opracować...
16
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 82 Transport 2012 Mirosław Gerigk Wydział Oceanotechniki i Okrętownictwa, Politechnika Gdańska OCENA RYZYKA I ZARZĄDZANIE BEZPIECZEŃSTWEM W CZASIE KATASTROFY OBIEKTU OCEANOTECHNICZNEGO LUB STATKU NA MORZU Rękopis dostarczono, listopad 2011 Streszczenie: W pracy przedstawiono metodę oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym, która oparta jest na ocenie zachowania się obiektu lub statku w stanie uszkodzonym oraz na ocenie ryzyka wypadku. Do oceny zachowania się obiektu lub statku proponuje sie zastosowanie badań na modelach fizycznych lub symulacji komputerowej ze wskazaniem na tą drugą metodę. Do oceny ryzyka można zastosować analizę ryzyka, na przykład elementy Formalnej Oceny Bezpieczeństwa FSA zalecanej przez IMO (International Maritime Organization). Proponowana metoda oparta jest na zastosowaniu całościowego podejścia do bezpieczeństwa obiektów (statków), gdzie uwzględnia się wpływ na bezpieczeństwo czynników o charakterze projektowym, operacyjnym oraz tych, związanych z zarządzaniem obiektem (statkiem) i wpływem czynnika ludzkiego. W metodzie stosuje się całościowy macierzowy model ryzyka, który umożliwia wyznaczenie ryzyka utraty obiektu dla możliwie wszystkich scenariuszy wypadku. W celu przystosowania metody do oceny bezpieczeństwa obiektów w stanie uszkodzonym w czasie katastrofy na morzu należy opracować procedurę zarządzania bezpieczeństwem obiektu (statku) w czasie katastrofy na morzu. W pracy pokazano jak rozbudować obecną metodę, aby taką procedurę opracować. Zarządzanie bezpieczeństwem w proponowanej metodzie/procedurze oparte jest najpierw na ocenie ryzyka a następnie na zarządzaniu ryzykiem. Proponuje się zastosowanie wybranych metod zarządzania ryzykiem. Przedstawiono propozycję systemu oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym w czasie katastrofy na morzu. Słowa kluczowe: ocena ryzyka, zarządzanie bezpieczeństwem, obiekt oceanotechniczny lub statek w stanie uszkodzonym 1. WPROWADZENIE Artykuł dotyczy bezpieczeństwa transportu morskiego z ukierunkowaniem na bezpieczeństwo obiektów oceanotechnicznych, w tym statków, w stanie uszkodzonym w warunkach operacyjnych. Przedstawiono metodę oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym, która oparta jest na ocenie
Transcript of OCENA RYZYKA I ZARZ DZANIE BEZPIECZEŃSTWEM W … · katastrofy na morzu należy opracować...
P R A C E N A U K O W E P O L I T E C H N I K I W A R S Z A W S K I E J z. 82 Transport 2012
Mirosław Gerigk
Wydział Oceanotechniki i Okrętownictwa, Politechnika Gdańska
OCENA RYZYKA I ZARZĄDZANIE BEZPIECZEŃSTWEM W CZASIE KATASTROFY
OBIEKTU OCEANOTECHNICZNEGO LUB STATKU NA MORZU
Rękopis dostarczono, listopad 2011
Streszczenie: W pracy przedstawiono metodę oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym, która oparta jest na ocenie zachowania się obiektu lub statku w stanie uszkodzonym oraz na ocenie ryzyka wypadku. Do oceny zachowania się obiektu lub statku proponuje sie zastosowanie badań na modelach fizycznych lub symulacji komputerowej ze wskazaniem na tą drugą metodę. Do oceny ryzyka można zastosować analizę ryzyka, na przykład elementy Formalnej Oceny Bezpieczeństwa FSA zalecanej przez IMO (International Maritime Organization). Proponowana metoda oparta jest na zastosowaniu całościowego podejścia do bezpieczeństwa obiektów (statków), gdzie uwzględnia się wpływ na bezpieczeństwo czynników o charakterze projektowym, operacyjnym oraz tych, związanych z zarządzaniem obiektem (statkiem) i wpływem czynnika ludzkiego. W metodzie stosuje się całościowy macierzowy model ryzyka, który umożliwia wyznaczenie ryzyka utraty obiektu dla możliwie wszystkich scenariuszy wypadku. W celu przystosowania metody do oceny bezpieczeństwa obiektów w stanie uszkodzonym w czasie katastrofy na morzu należy opracować procedurę zarządzania bezpieczeństwem obiektu (statku) w czasie katastrofy na morzu. W pracy pokazano jak rozbudować obecną metodę, aby taką proceduręopracować. Zarządzanie bezpieczeństwem w proponowanej metodzie/procedurze oparte jest najpierw na ocenie ryzyka a następnie na zarządzaniu ryzykiem. Proponuje się zastosowanie wybranych metod zarządzania ryzykiem. Przedstawiono propozycję systemu oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym w czasie katastrofy na morzu.Słowa kluczowe: ocena ryzyka, zarządzanie bezpieczeństwem, obiekt oceanotechniczny lub statek w stanie uszkodzonym
1. WPROWADZENIE
Artykuł dotyczy bezpieczeństwa transportu morskiego z ukierunkowaniem na bezpieczeństwo obiektów oceanotechnicznych, w tym statków, w stanie uszkodzonym w warunkach operacyjnych. Przedstawiono metodę oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym, która oparta jest na ocenie
26 Mirosław Gerigk
zachowania się obiektu uszkodzonego lub statku oraz na ocenie ryzyka wypadku. Do oceny ryzyka stosuje się analizę ryzyka, w tym elementy Formalnej Oceny Bezpieczeństwa FSA zalecanej przez IMO. Proponowana metoda oparta jest na zastosowaniu całościowego podejścia do bezpieczeństwa obiektów, gdzie uwzględnia się wpływ na bezpieczeństwo czynników o charakterze projektowym, operacyjnym oraz tych, związanych z zarządzaniem i wpływem czynnika ludzkiego. Zastosowano całościowy model ryzyka, który umożliwia wyznaczenie ryzyka utraty obiektu, w oparciu o ocenę jego zachowania się w czasie wypadku. Analizę ryzyka przeprowadza się w oparciu o drzewa zdarzeń ETA, w których uwzględniono różne scenariusze wypadku. Poszczególne sekwencje zdarzeń mogą zawierać zagrożenia, zdarzenia pośrednie, zdarzenia dodatkowe i zdarzenia końcowe (konsekwencje). Ryzyko dla danego scenariusza wypadku oblicza się w oparciu o macierzowy model ryzyka. Miarą bezpieczeństwa obiektu w proponowanej metodzie jest ryzyko lub jego poziom. Ocenę ryzyka (RA, QRA) przeprowadza się stosując kryteria akceptacji ryzyka (RAC) w postaci macierzy ryzyka lub koncepcji ALARP. Przy ocenie ryzyka i zarządzając ryzykiem stosuje się tak zwane opcje kontroli ryzyka (RCO). W oparciu o tak opracowaną metodę można opracować proceduręzarządzania bezpieczeństwem obiektu lub statku w czasie katastrofy na morzu, która z kolei oparta jest na zarządzaniu ryzykiem wypadku. Zarządzanie bezpieczeństwem w metodzie/procedurze oparte jest wpierw na ocenie ryzyka, a następnie na zarządzaniu ryzykiem. Proponuje się zastosowanie wybranych metod zarządzania ryzykiem, które ukierunkowane są na podejmowanie decyzji. Są to metody: sztucznych sieci neuronowych ANN, koncepcji Taguchi'ego i wielokryterialne podejścia do podejmowania decyzji. Przedstawiono propozycję systemu oceny bezpieczeństwa obiektów oceanotechnicznych i statków w stanie uszkodzonym w czasie katastrofy na morzu, który by taką proceduręwykorzystywał.
Morza i oceny świata eksploatowane są z uwagi na żywność, zasoby mineralne i energię, co wymaga stałego rozwoju transportu morskiego, w tym statków, i infrastruktury morskiej. Akweny te odgrywają także coraz ważniejszą rolę z uwagi na rozwój turystyki. Nie należy też zapominać o tym, że nadal obowiązuje zasada strategiczna, że kto rządzi morzami rządzi lądami.
Obiekty oceanotechniczne powinny charakteryzować się odpowiednimi cechami funkcjonalnymi, efektywnościowymi i tymi związanymi z ich bezpieczeństwem. Ponieważpraca dotyczy obiektów i statków stosowanych w morskim przemyśle wydobywczym, ograniczymy się tutaj do typowych obiektów, które są w tym sektorze przemysłu stosowane. Zatem, dotyczy to następujących obiektów i statków [2, 3, 12]:
1) platform i obiektów produkcyjnych, o następujących stosowanych typach: TPG 3300, Spar Truss, TLP - 1 Leg, Buoy, Octobuoy, Semi-submersible, Tower, Spar Classic, TLP - 3 Leg, TLP - 4 Leg, FPSO, SSP buoy, inne;
2) statków do przewozu ropy i gazu i jednostek pomocniczych, są to: zbiornikowce, chemikaliowce, jednostki zaopatrzeniowe morskiego przemysłu wydobywczego typu OSV (Offshore Supply Vessels), holowniki, inne;
3) systemów i obiektów produkcyjnych posadowionych na dnie; 4) pływających i stacjonarnych turbin wiatrowych i elektrowni falowych. Tematyka artykułu ukierunkowana jest na bezpieczeństwo obiektów
oceanotechnicznych w stanie uszkodzonym w czasie katastrofy na morzu. Jak poważne mogą być konsekwencje katastrof związanych z eksploatacją obiektów
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 27
oceanotechnicznych, można zorientować się analizując katastrofy, które miały miejsce na świecie w okresie ostatnich kilku dekad. Za najgroźniejsze w XX i XXI wieku można uznać następujące katastrofy [3, 20]:
1) katastrofę zbiornikowca Amoco Cadiz (1978) - do morza dostało się ok. 223 000 ton ropy;
2) platformy wiertniczej Piper Alfa (1988) - zginęło 167 osób, straty 3.4 miliarda dolarów;
3) zbiornikowca Exxon Valdez (1989) - plama ropy na powierzchni 1300 km2, zginęły niezliczone ilości ryb, ptaków, fok, morsów i wielorybów;
4) wojnę w Zatoce Perskiej (1991) - uwolniono, wg. różnych źródeł, od 800 tys. do 1,5 mln ton ropy naftowej do morza; rozlewy ropy pokryły też 49 km2 powierzchni lądu a 953 km2 zostały skażone;
5) katastrofę platformy wydobywczej Deepwater Horizon (2010) - 11 pracowników poniosło śmierć, 17 osób zostało rannych, największa katastrofa ekologiczna w historii USA, całkowita ilość wycieku ropy do morza to prawie 5 mln baryłek (czyli ponad 666 tysięcy ton) ropy.
Z analizy powyższych i innych katastrof na morzu wynika, że dotychczasowe wypadki nie uchroniły ludzkości przed popełnianiem często tych samych błędów. Bardzo pouczająca w tym względzie jest także analiza wypadków, które wydarzyły się na akwenie Morza Bałtyckiego [14, 15].
Celem badań, których elementy przedstawiono w poniższym artykule, jest opracowanie metody do oceny ryzyka wypadku i zarządzania bezpieczeństwem obiektu oceanotechnicznego lub statku w stanie uszkodzonym w czasie katastrofy na morzu. Cechącharakterystyczną proponowanej metody powinna być możliwość szybkiego modelowania sytuacji w czasie katastrofy, w tym [3]:
1) identyfikacja stanu obiektu lub statku uszkodzonego; 2) analiza zachowania się obiektu lub statku uszkodzonego; 3) analiza ryzyka wypadku na wszystkich etapach katastrofy; 4) ocena bezpieczeństwa ludzi (pasażerów i załogi), mienia (obiektu lub statku oraz
ładunku) oraz środowiska naturalnego. Konieczność podjęcia takich badań wynika z następujących powodów: 1) wzrostu przewozów, w tym ładunków płynnych, na akwenie Morza Bałtyckiego
i w polskiej strefie odpowiedzialności SAR; 2) ewentualnych konsekwencji katastrofy obiektu oceanotechnicznego (platformy
wydobywczej) lub statku, ze szczególnym uwzględnieniem zbiornikowców do przewozu produktów ropo-pochodnych;
3) konieczności ratowania ludzi, mienia i ochrony środowiska naturalnego, na wypadek katastrofy obiektu oceanotechnicznego lub statku w polskiej strefie odpowiedzialności SAR.
28 Mirosław Gerigk
2. OBIEKT OCEANOTECHNICZNY LUB STATEK W STANIE USZKODZONYM
Obiekt oceanotechniczny znajduje się w stanie uszkodzonym, jeśli na skutek wystąpienia takich zagrożeń jak kolizja, uderzenie o przeszkodę, wejście na mieliznę, atak terrorystyczny czy inne, nastąpi dostawanie się dużych ilości wody zaburtowej do wnętrza kadłuba obiektu, co spowoduje znaczne obniżenie poziomu bezpieczeństwa obiektu do jego utraty włącznie. Obiekt może znaleźć się w stanie uszkodzonym także wtedy, gdy uszkodzeniu ulega jeden z podstawowych podsystemów obiektu lub gdy doszło na przykład do ataku terrorystycznego, co może prowadzić do dużych zmian w zachowaniu się obiektu.
Proces zatapiania przedziału lub danej grupy przedziałów wodoszczelnych, kadłuba obiektu uszkodzonego, dzieli się na etapy i fazy. Wyróżnia się etapy: początkowy, pośrednie i końcowy. Fazy zatapiania związane są ze stopniem wypełnienia zatapianego przedziału wodą zaburtową. Należy zdawać sobie sprawę z faktu, że w czasie zatapiania woda zaburtowa może dostawać się do wnętrza przedziału jak i wydostawać się z niego. Proces ten zależy od wielu czynników. Na obiekt w stanie uszkodzonym działają różne wymuszenia wewnętrzne i zewnętrzne, najczęściej o charakterze losowym. W stanie uszkodzonym, obiekt powinien zachować zarówno stateczność jak i pływalność. Przy czym za ważniejszą należy uznać zdolność obiektu do zachowania stateczności. Obie cechy decydują o przetrwaniu procesu zatapiania przez obiekt na każdym etapie i w każdej fazie zatapiania obiektu.
Powyższe cechy w znacznym stopniu decydują o tym, czy po zakończeniu procesu zatapiania, obiekt uszkodzony może kontynuować misję, czy należy go przeholować do portu (o własnych siłach (obiekt z napędem), na holu), czy też obiekt powinien oczekiwać na pomoc z zewnątrz. Może też dojść do utraty obiektu na skutek utraty stateczności i/lub utraty pływalności [3].
3. METODA OCENY BEZPIECZEŃSTWEM OBIEKTU OCEANOTECHNICZNEGO LUB STATKU
W STANIE USZKODZONYM
W ramach prac koordynowanych przez IMO, proponuje się zastosować do oceny bezpieczeństwa statków w stanie uszkodzonym, wymienione niżej metody.
Pierwsza metoda oparta jest na zastosowaniu całościowego modelu ryzyka [5-9, 17, 18]: R=PC PC/F PC/F/NS PC/F/NS/TTS C (1)
gdzie: PC – prawdopodobieństwo wystąpienia kolizji; PC/F – prawdopodobieństwo warunkowe zatapiania kadłuba po uszkodzeniu poszycia na skutek kolizji; PC/F/NS –
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 29
prawdopodobieństwo warunkowe nieprzetrwania kolizji na skutek zatapiania kadłuba po uszkodzeniu poszycia na skutek kolizji; PC/F/NS/TTS – prawdopodobieństwo warunkowe wystąpienia danego czasu tonięcia statku na skutek nieprzetrwania kolizji na skutek zatapiania kadłuba po uszkodzeniu poszycia na skutek kolizji; C – konsekwencje kolizji z uwagi na ofiary, zranienia, mienie (ładunek, statek) i środowisko.
Druga metoda, oparta jest na określeniu: 1) jakie zatopienie pod względem jego położenia i wielkości (określanej na podstawie
ilości wody jaka może się dostać do wnętrza kadłuba przez uszkodzenie w poszyciu kadłuba statku), statek jest w stanie przetrwać,
2) czasu zatapiania i możliwości powrotu uszkodzonego statku do portu. W metodzie tej cele bezpieczeństwa zostały podzielone na trzy kategorie [19]:
1) I - statek zachował pływalność i jest zdolny do powrotu do portu o własnych siłach RTP (ang. Return To Port),
2) II - statek zachował pływalność, ale jest niezdolny do powrotu do portu o własnych siłach WFA (ang. Waiting For Assistance),
3) III – statek prawdopodobnie przewróci się i zatonie, konieczne będzie opuszczenie statku AS (ang. Abandonment of the Ship).
Trzecia metoda oparta jest na koncepcji prawdopodobieństwa zupełnego przetrwania kolizji przez statek, występującego w postaci wskaźnika podziału grodziowego ASRtP(gdzie: SRtP – Safe Return to Port), który jest obliczany na podstawie charakterystyk stateczności resztowej (stateczności awaryjnej) statku w stanie uszkodzonym [8]:
ASRtP = 0,4 ASRtP,s + 0,4 ASRtP,p + 0,2 ASRtP,l (2)
gdzie: ASRtP,s, ASRtP,p i ASRtP,l – wskaźniki podziału grodziowego odpowiadające stanom załadownia statku: pełnemu (s), pośredniemu (p) i balastowemu (l).
Wskaźniki ASRtP,s, ASRtP,p i ASRtP,l należy obliczać zgodnie z zależnością podaną w przepisach [8].
Ocenę bezpieczeństwa obiektów w stanie uszkodzonym można przeprowadzić za pomocą metod prawno-nakazowych (preskrypcyjnych), które oparte są na obowiązujących przepisach lub za pomocą metod, opartych na ocenie zachowania się obiektu i ocenie ryzyka wypadku [3].
Jeśli chodzi o statki, istniejące metody mają charakter preskrypcyjny i oparte są na wymaganiach zawartych w przepisach konwencji (SOLAS, MARPOL). Metody te trudno zastosować do oceny bezpieczeństwa statków w stanie uszkodzonym, przeznaczonych do przewozu produktów ropopochodnych, chemikaliów i gazu. Wynika to między innymi z faktu, że są one ukierunkowane raczej na projektowanie. Niektóre elementy tych metod mają charakter semi-probabilistyczny lub wręcz deterministyczny. Najpoważniejszym mankamentem tych metod jest to, że przy ich zastosowaniu bierze siępod uwagę ograniczoną liczbę scenariuszy wypadku. Właśnie to wyklucza możliwość ich zastosowania do oceny bezpieczeństwa obiektu w stanie uszkodzonym w czasie katastrofy [3, 5-7].
Jeśli chodzi o morski przemysł wydobywczy, stosowane są bardziej zaawansowane metody oceny bezpieczeństwa niż w przypadku ogólnie pojętego okrętownictwa. Większość z nich oparta jest na zastosowaniu probabilistycznej oceny bezpieczeństwa PSA (Probabilistic Safety Assessment), oceny zachowania się obiektów PA (Performance
30 Mirosław Gerigk
Assessment) i oceny ryzyka wypadku RA (Risk Assessment). Zdecydowano się między innymi na zastosowanie do oceny bezpieczeństwa metodyki opartej na Przypadku Bezpieczeństwa (ang. Safety Case) - przypadek Piper Alfa. Zdaniem autora, przemysł ten nadal boryka się z brakiem poprawnego modelu/modeli ryzyka wypadku, nieprzetrwania katastrofy [3].
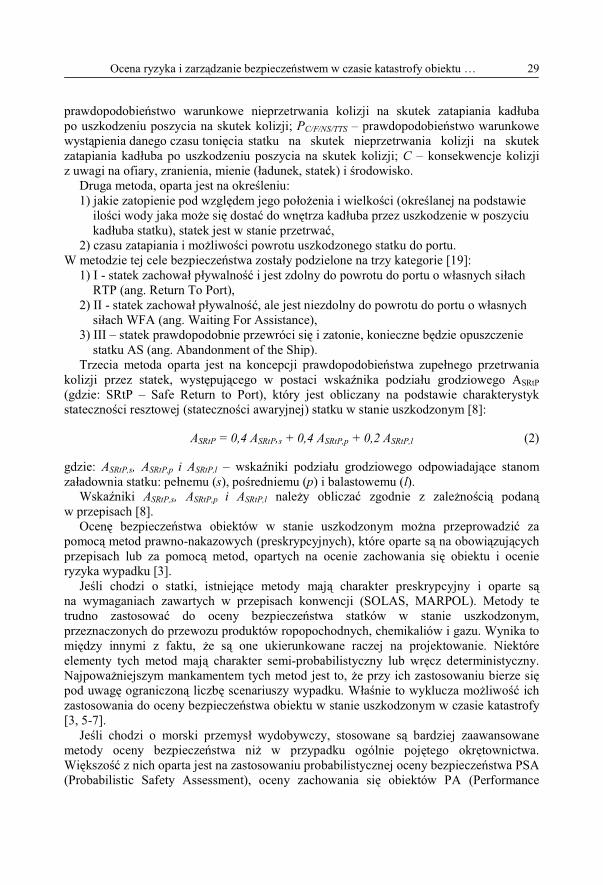
Z badań przeprowadzonych przez autora wynika, że do oceny bezpieczeństwa obiektów oceanotechnicznych w stanie uszkodzonym można zastosować metodę opartą na ocenie zachowania się obiektu i ocenie ryzyka wypadku [3]. Metodę taką opracowano w myślą o bezpieczeństwie statków w stanie uszkodzonym, ale z uwagi na fakt, że metoda ta ma cechy utylitarne, można ją także zastosować do oceny obiektów oceanotechnicznych [3]. Strukturę takiej metody przedstawiono na rysunku 1 [3].
Główną cechą metody jest to, że do oceny bezpieczeństwa obiektu zastosowano tak zwane podejście całościowe, które polega na [3]:
1) uwzględnieniu wpływu na bezpieczeństwo obiektu czynników o charakterze projektowym, eksploatacyjnym i tych związanych z zarządzaniem i czynnikiem ludzkim;
2) zastosowaniu całościowego modelu ryzyka, który umożliwia wzięcie pod uwagęmożliwie wszystkich scenariuszy wypadku.
Rys. 1. Struktura metody oceny bezpieczeństwa obiektów (statków) w stanie uszkodzonym, opartej na ocenie zachowania się
obiektu (statku) i ocenie ryzyka
Do oceny zachowania się obiektu można wykorzystać badania na modelach fizycznych lub symulację komputerową. Ocena zachowania się obiektu uszkodzonego dotyczy oceny jego pływalności, stateczności i zachowania się pod wpływem wymuszeń wewnętrznych (zatapianie, przesunięcie ładunku) i zewnętrznych (oddziaływanie falowania, wiatru). Ocenę zachowania się obiektu uszkodzonego za pomocą symulacji komputerowej można przeprowadzić stosując tak zwane liniowe lub nieliniowe modele kołysań. Bardziej wskazane jest zastosowanie nieliniowych modeli, gdyż zastosowane w nich stochastyczne nieliniowe równania ruchów obiektu umożliwiają uzyskanie rozwiązań w dziedzinie czasu.
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 31
Na obecnym etapie badań wykorzystuje się też modele liniowe, gdzie rozwiązania uzyskuje się w dziedzinie częstości falowania.
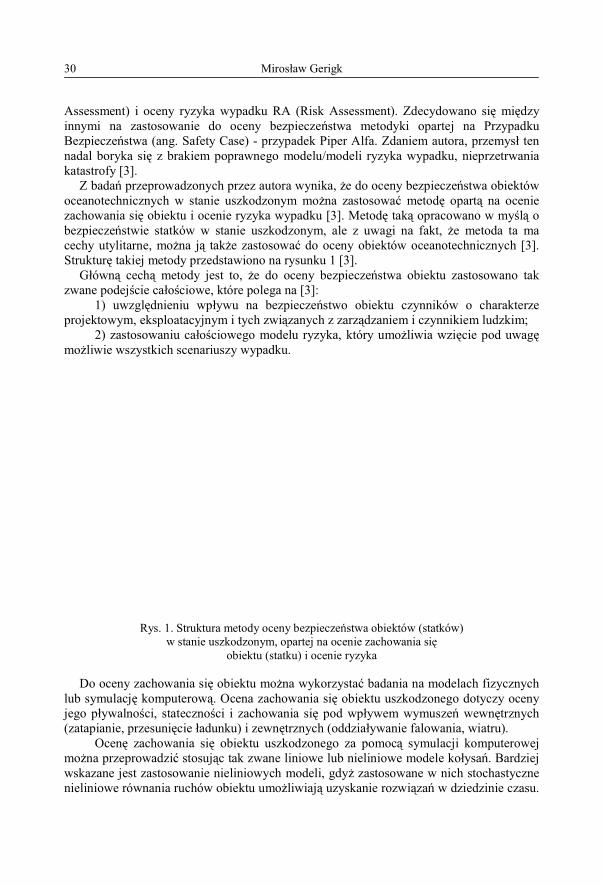
Siły hydrodynamiczne działające na kołyszący się obiekt wraz z siłami od działania wody w zatopionym przedziale można wyznaczyć za pomocą hybrydowej metody, zawierającej na przykład, elementy metody panelowej wyznaczania sił od ciśnienia w wodzie [2]. Ocena zachowania się obiektu na wszystkich etapach i we wszystkich fazach zatapiania obiektu, wymaga znajomości przebiegów czasowych kołysań liniowych i kątowych, dla wybranych stopni swobody obiektu przedstawionych na rysunku 2. W przypadku statku w stanie uszkodzonym takimi charakterystykami mogą być przebieg czasowy kołysań bocznych kątowych (roll) lub przebieg czasowy kołysań podłużnych kątowych statku (pitch), których przykład pochodzący z badań na dużym modelu fizycznym przedstawiono na rysunku 3 [3]. Na rysunku 3 charakterystyki te oznaczono odpowiednio jako przechył i przegłębienie. Należy zauważyć, że przebieg czasowy kołysań bocznych kątowych (roll) jest charakterystyką charakteryzującą się dużymi zmianami przebiegu i dużymi wartościami zmian kątów przechyłu statku. Między innymi z tych powodów charakterystyka ta ma większe znaczenie z uwagi na ocenębezpieczeństwa statku niż przedstawiony na rysunku 3, przebieg czasowy kołysańpodłużnych kątowych statku (pitch).
Ocena zachowania się obiektu w stanie uszkodzonym umożliwia opracowanie scenariuszy wypadku w postaci drzew zdarzeń (drzew konsekwencji) ETA. Drzewa zdarzeń ETA umożliwiają oszacowanie ryzyka wypadku dla poszczególnych scenariuszy wypadku [3].
Ocena ryzyka wypadku, które w metodzie nazwano ryzykiem nieprzetrwania katastrofy przez obiekt (statek) polega na oszacowaniu ryzyka, co przedstawiono w kolejnym rozdziale. Następnie dokonuje się oceny ryzyka (RA, QRA) stosując kryteria akceptacji ryzyka (RAC) w postaci macierzy ryzyka lub koncepcji ALARP.
ζ = z
η = y
Kołysania podłużne liniowe (surge)
Kołysania poprzeczne liniowe, kołysania burtowe (sway)
Kołysania podłużne kątowe, kiwanie (pitch)
G
ξ = x
Kołysania pionowe liniowe, nurzanie (heave)
Kołysania poziome kątowe, myszkowanie (yaw)
Kołysania poprzeczne kątowe, kołysania boczne (roll)
Rys. 2. Stopnie swobody obiektu (statku) na swobodnej powierzchni wody sfalowanej
32 Mirosław Gerigk
Rys. 3. Przykład przebiegu czasowego kołysań bocznych kątowych statku (roll) wraz z przebiegiem czasowym kołysań podłużnych kątowych statku (pitch)
Ogolnie, do oceny ryzyka w metodzie można zastosować nastepujące kryteria oceny ryzyka [3]:
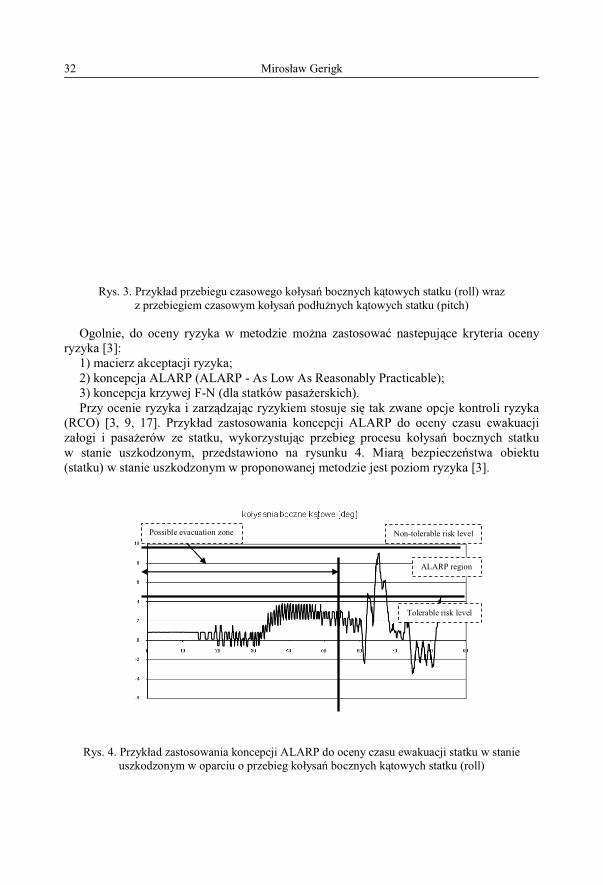
1) macierz akceptacji ryzyka; 2) koncepcja ALARP (ALARP - As Low As Reasonably Practicable); 3) koncepcja krzywej F-N (dla statków pasażerskich). Przy ocenie ryzyka i zarządzając ryzykiem stosuje się tak zwane opcje kontroli ryzyka
(RCO) [3, 9, 17]. Przykład zastosowania koncepcji ALARP do oceny czasu ewakuacji załogi i pasażerów ze statku, wykorzystując przebieg procesu kołysań bocznych statku w stanie uszkodzonym, przedstawiono na rysunku 4. Miarą bezpieczeństwa obiektu (statku) w stanie uszkodzonym w proponowanej metodzie jest poziom ryzyka [3].
Non-tolerable risk level
ALARP region
Tolerable risk level
Possible evacuation zone
Rys. 4. Przykład zastosowania koncepcji ALARP do oceny czasu ewakuacji statku w stanie uszkodzonym w oparciu o przebieg kołysań bocznych kątowych statku (roll)
Ocena ryzyka i zarz�dzanie bezpiecze�stwem w czasie katastrofy obiektu … 33
4. RYZYKO NIEPRZETRWANIA KATASTROFY PRZEZ OBIEKT OCEANOTECHNICZNY
LUB STATEK W STANIE USZKODZONYM Ryzyko wypadku w metodzie zosta�o zdefiniowane jako iloczyn prawdopodobie�stwa
wyst�pienia danego zagro�enia Pi i konsekwencji wypadku Ci [3, 13]:
Ri =Pi Ci (3)
Z kolei ryzyko nieprzetrwania kolizji przez statek zosta�o wyznaczone modeluj�c ryzyko w metodzie za pomoc� macierzowego modelu ryzyka. Bez wzgl�du na metod� zastosowan� do analizy i oceny zachowania si� statku w stanie uszkodzonym (badania na modelu fizycznym czy symulacja komputerowa), ryzyko nieprzetrwania kolizji przez statek nale�y obliczy� w sposób nast�puj�cy [3, 17]:
R = PC PF/C PoC CC (4)
gdzie: PC - prawdopodobie�stwo wyst�pienia kolizji, PF/C - prawdopodobie�stwo zatapiania obiektu po wyst�pieniu kolizji, PoC - prawdopodobie�stwo nieprzetrwania katastrofy przez obiekt (statek), CC - konsekwencje katastrofy szacowane na podstawie analizy zachowania si� uszkodzonego obiektu.
Przy czym prawdopodobie�stwo nieprzetrwania kolizji przez statek PoC mo�na wyznaczy� za pomoc� jednej z czterech metod [3]: zero-jedynkowej, statycznej, metody opartej o definicj� prawdopodobie�stwa zupe�nego przetrwania kolizji przez statek A, metody opartej na ocenie zachowania si� statku w stanie uszkodzonym i identyfikacji charakterystyk procesu stochastycznego ko�ysa� bocznych statku w stanie uszkodzonym (metoda w�asna), metody opartej na zastosowaniu teorii zbiorów rozmytych.
Analiza ryzyka przy u�yciu metody opartej na ocenie zachowania si� statku w stanie uszkodzonym polega najpierw na identyfikacji charakterystyki procesu stochastycznego ko�ysa� bocznych statku w stanie uszkodzonym. Nast�pnie nale�y obliczy� prawdopodobie�stwa warunkowe, dotycz�ce zdarze� inicjuj�cych ZIi, zdarze� g�ównych ZGj (zagro�enia), zdarze� po�rednich ZPk i zdarze� ko�cowych ZKl (konsekwencje w scenariuszu wypadku) [3].
W przypadku, gdy w danym scenariuszu zdarze�, na etapie zdarze� po�rednich, wyst�puj� te� zdarzenia dodatkowe ZDj, wyznaczenie prawdopodobie�stwa warunkowego wyst�pienia konsekwencji Ci (zdarze� ko�cowych w prawdopodobie�stwie PoC(Ci)) znacznie si� komplikuje [1, 3].
Wówczas prawdopodobie�stwo warunkowe wyst�pienia konsekwencji Ci (zdarze� ko�cowych w prawdopodobie�stwie PoC(Ci)), wyst�puj�ce we wzorze (5), nale�y obliczy� w sposób nast�puj�cy [3]:
� � � � � � � �1 1
Nzd Nzdi i j i j jj j
PoC C P C , ZD P C , ZD P ZD� �
�� � (5)
34 Mirosław Gerigk
gdzie: j – liczba indeksująca istniejące kategorie zdarzeń dodatkowych; Nzd – liczba kategorii zdarzeń dodatkowych; P(ZDj) – prawdopodobieństwo wystąpienia zdarzenia dodatkowego ZDj; P(Ci/ZDj) – prawdopodobieństwo warunkowe wystąpienia skutków Cipod warunkiem wystąpienia zdarzenia dodatkowego ZDj.
Stopień komplikacji związanych z oceną ryzyka nieprzetrwania katastrofy przez obiekt, przy uwzględnieniu wpływu czynnika ludzkiego, środowiska i zarządzania (podejście całościowe do bezpieczeństwa), przedstawiono schematycznie na rysunku 5.
Rys. 5. Schemat przedstawiający wpływ czynnika ludzkiego, środowiska i zarządzania (podejście całościowe do bezpieczeństwa) na ocenę ryzyka nieprzetrwania katastrofy
przez obiekt (statek): R = PC PF/C PoC CCS/C [3]
5. ZARZĄDZANIE BEZPIECZEŃSTWEM OBIEKTU OCEANOTECHNICZNEGO LUB STATKU W STANIE
USZKODZONYM. SYSTEM ZARZĄDZANIA BEZPIECZEŃSTWEM
W CZASIE KATASTROFY NA MORZU
Ocena ryzyka jest związana z wyznaczeniem wartości ryzyka, jako iloczynu prawdopodobieństwa wystąpienia danego zagrożenia i konsekwencji jego wystąpienia oraz na użyciu odpowiednich kryteriów oceny ryzyka. Zarządzanie ryzykiem jest możliwe na podstawie oceny ryzyka i polega na znalezieniu odpowiedzi na następujące pytania [3, 4, 10, 11, 16, 17]:
1) co można zrobić żeby obniżyć ryzyko? 2) jakie pociągnie to za sobą koszty? 3) jaki będzie tego wpływ na przyszłe rozwiązania dotyczące bezpieczeństwa?
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 35
Zarządzanie ryzykiem można zdefiniować, jako systematyczny i całościowy proces, który umożliwia ilościową ocenę ryzyka i zarządzanie nim [2]. Zarządzanie ryzykiem stanowi integralną część procesu zarządzania związanego z projektowaniem, eksploatacją i zarządzaniem systemem technicznym, którym jest statek i obejmuje następujące elementy:
1) ocenę ryzyka; 2) zarządzanie ryzykiem; 3) system bezpieczeństwa statku (czynniki bezpieczeństwa). Zarządzanie ryzykiem w metodzie jest oparte na strategii redukcji ryzyka, która polega
na [3]: 1) redukcji prawdopodobieństwa wystąpienia danych zdarzeń, obejmującej:
- redukcja prawdopodobieństwa wystąpienia zdarzeń pośrednich ZPk; - redukcja prawdopodobieństwa wystąpienia zdarzeń dodatkowych ZDj;
2) redukcji konsekwencji wypadku, obejmującej: - redukcja prawdopodobieństwa wystąpienia zdarzeń końcowych ZKl (w przypadku,
gdy brak zdarzeń dodatkowych); - redukcja prawdopodobieństwa wystąpienia konsekwencji PoC(Ci) (w przypadku,
gdy występują zdarzenia dodatkowe). Czynniki, wynikające z całościowego podejścia do bezpieczeństwa statku, z punktu
widzenia całego okresu życia statku i czynniki związane z rzeczywistością otaczającąstatek, powinny być uwzględnione w strukturze systemu zarządzania bezpieczeństwem. Należy podkreślić, że system bezpieczeństwa obejmuje elementy (i związki między nimi), które mają wpływ na bezpieczeństwo statku. System ten omówiono w literaturze [3].
System zarządzania bezpieczeństwem statku obejmuje elementy (i związki między nimi), które w czasie eksploatacji i w czasie katastrofy umożliwiają [3]:
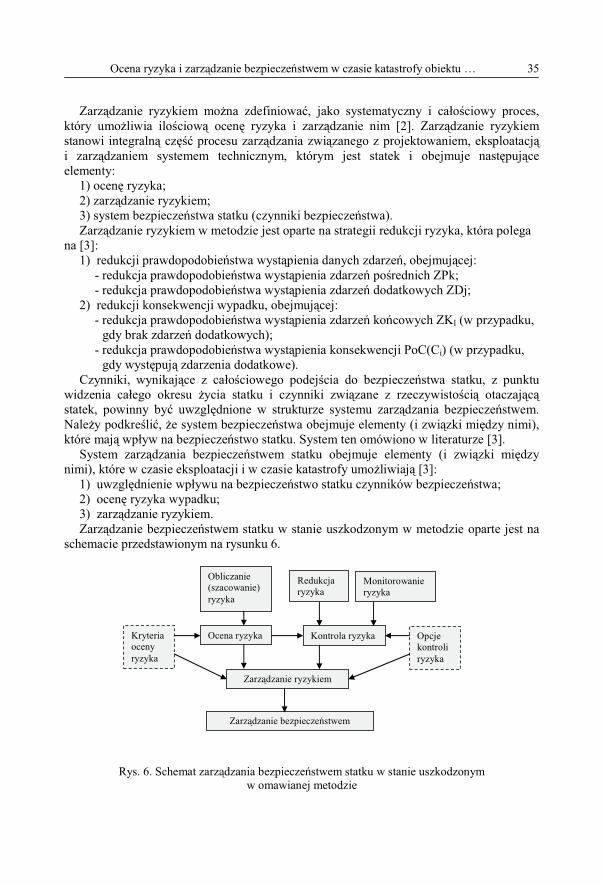
1) uwzględnienie wpływu na bezpieczeństwo statku czynników bezpieczeństwa; 2) ocenę ryzyka wypadku; 3) zarządzanie ryzykiem. Zarządzanie bezpieczeństwem statku w stanie uszkodzonym w metodzie oparte jest na
schemacie przedstawionym na rysunku 6.
Zarządzanie ryzykiem
Obliczanie (szacowanie) ryzyka
Kontrola ryzyka Ocena ryzyka Kryteria oceny ryzyka
Opcje kontroli ryzyka
Redukcja ryzyka
Monitorowanie ryzyka
Zarządzanie bezpieczeństwem
Rys. 6. Schemat zarządzania bezpieczeństwem statku w stanie uszkodzonym w omawianej metodzie
36 Mirosław Gerigk
Do zarządzania bezpieczeństwem w metodzie można zastosować następujące metody [10, 11, 13, 16]:
1) koncepcji Taguchi; 2) wielokryterialnego podejścia do podejmowania decyzji; 3) sztucznych sieci neuronowych ANN. Metoda Taguchi obejmuje kolejno następujące elementy: definicję problemu, czynniki
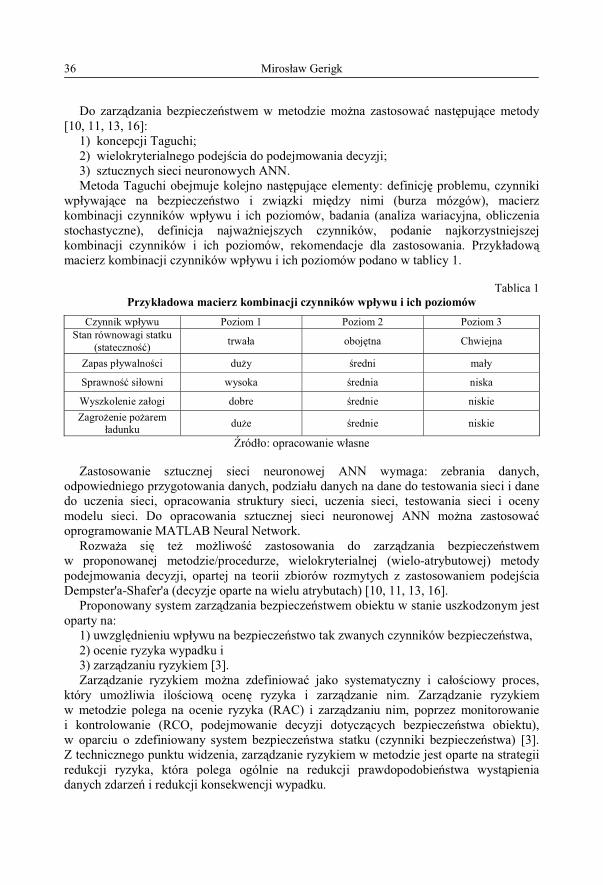
wpływające na bezpieczeństwo i związki między nimi (burza mózgów), macierz kombinacji czynników wpływu i ich poziomów, badania (analiza wariacyjna, obliczenia stochastyczne), definicja najważniejszych czynników, podanie najkorzystniejszej kombinacji czynników i ich poziomów, rekomendacje dla zastosowania. Przykładową
macierz kombinacji czynników wpływu i ich poziomów podano w tablicy 1.
Tablica 1 Przykładowa macierz kombinacji czynników wpływu i ich poziomów
Czynnik wpływu Poziom 1 Poziom 2 Poziom 3Stan równowagi statku
(stateczność) trwała obojętna Chwiejna
Zapas pływalności duży średni mały
Sprawność siłowni wysoka średnia niska
Wyszkolenie załogi dobre średnie niskie Zagrożenie pożarem
ładunku duże średnie niskie
Źródło: opracowanie własne
Zastosowanie sztucznej sieci neuronowej ANN wymaga: zebrania danych, odpowiedniego przygotowania danych, podziału danych na dane do testowania sieci i dane do uczenia sieci, opracowania struktury sieci, uczenia sieci, testowania sieci i oceny modelu sieci. Do opracowania sztucznej sieci neuronowej ANN można zastosowaćoprogramowanie MATLAB Neural Network.
Rozważa się też możliwość zastosowania do zarządzania bezpieczeństwem w proponowanej metodzie/procedurze, wielokryterialnej (wielo-atrybutowej) metody podejmowania decyzji, opartej na teorii zbiorów rozmytych z zastosowaniem podejścia Dempster'a-Shafer'a (decyzje oparte na wielu atrybutach) [10, 11, 13, 16].
Proponowany system zarządzania bezpieczeństwem obiektu w stanie uszkodzonym jest oparty na:
1) uwzględnieniu wpływu na bezpieczeństwo tak zwanych czynników bezpieczeństwa, 2) ocenie ryzyka wypadku i 3) zarządzaniu ryzykiem [3]. Zarządzanie ryzykiem można zdefiniować jako systematyczny i całościowy proces,
który umożliwia ilościową ocenę ryzyka i zarządzanie nim. Zarządzanie ryzykiem w metodzie polega na ocenie ryzyka (RAC) i zarządzaniu nim, poprzez monitorowanie i kontrolowanie (RCO, podejmowanie decyzji dotyczących bezpieczeństwa obiektu), w oparciu o zdefiniowany system bezpieczeństwa statku (czynniki bezpieczeństwa) [3]. Z technicznego punktu widzenia, zarządzanie ryzykiem w metodzie jest oparte na strategii redukcji ryzyka, która polega ogólnie na redukcji prawdopodobieństwa wystąpienia danych zdarzeń i redukcji konsekwencji wypadku.
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 37
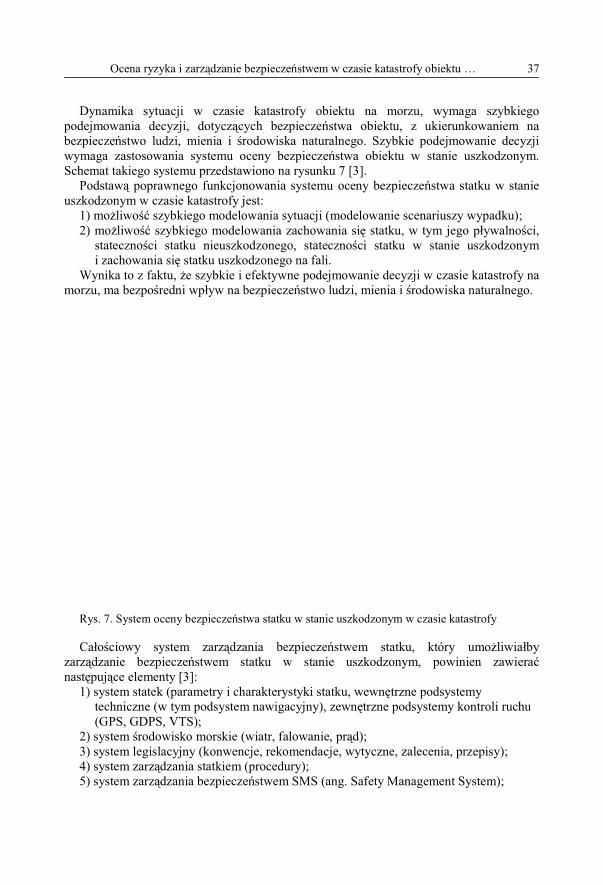
Dynamika sytuacji w czasie katastrofy obiektu na morzu, wymaga szybkiego podejmowania decyzji, dotyczących bezpieczeństwa obiektu, z ukierunkowaniem na bezpieczeństwo ludzi, mienia i środowiska naturalnego. Szybkie podejmowanie decyzji wymaga zastosowania systemu oceny bezpieczeństwa obiektu w stanie uszkodzonym. Schemat takiego systemu przedstawiono na rysunku 7 [3].
Podstawą poprawnego funkcjonowania systemu oceny bezpieczeństwa statku w stanie uszkodzonym w czasie katastrofy jest:
1) możliwość szybkiego modelowania sytuacji (modelowanie scenariuszy wypadku); 2) możliwość szybkiego modelowania zachowania się statku, w tym jego pływalności,
stateczności statku nieuszkodzonego, stateczności statku w stanie uszkodzonym i zachowania się statku uszkodzonego na fali.
Wynika to z faktu, że szybkie i efektywne podejmowanie decyzji w czasie katastrofy na morzu, ma bezpośredni wpływ na bezpieczeństwo ludzi, mienia i środowiska naturalnego.
Rys. 7. System oceny bezpieczeństwa statku w stanie uszkodzonym w czasie katastrofy
Całościowy system zarządzania bezpieczeństwem statku, który umożliwiałby zarządzanie bezpieczeństwem statku w stanie uszkodzonym, powinien zawieraćnastępujące elementy [3]:
1) system statek (parametry i charakterystyki statku, wewnętrzne podsystemy techniczne (w tym podsystem nawigacyjny), zewnętrzne podsystemy kontroli ruchu (GPS, GDPS, VTS);
2) system środowisko morskie (wiatr, falowanie, prąd); 3) system legislacyjny (konwencje, rekomendacje, wytyczne, zalecenia, przepisy); 4) system zarządzania statkiem (procedury); 5) system zarządzania bezpieczeństwem SMS (ang. Safety Management System);
38 Mirosław Gerigk
6) system czynnik ludzki; 7) zintegrowany system zarządzania ISM (ang. Integrated System Management); 8) system awaryjny umożliwiający opis uszkodzenia; 9) system alarmowy; 10) system ewakuacyjny; 11) system ratowniczy. Należy dodać, że cztery ostatnie elementy systemu zarządzania bezpieczeństwem statku
powinny być uaktywniane w momencie, gdy statek znajdzie się w stanie uszkodzonym.
6. WNIOSKI
Obecne prace badawcze związane są z dalszym rozwojem omówionej metody. Rozbudowywany jest całościowy model ryzyka oraz procedura zarządzania ryzykiem wypadku. Zamierzonym efektem badań jest opracowanie modelu obliczeniowego do szybkiej symulacji sytuacji na morzu w czasie katastrofy, który powinien umożliwiaćocenę zachowania się obiektu (statku) w stanie uszkodzonym i ocenę ryzyka na kolejnych etapach katastrofy.
Omawiane wyniki badań związane są z realizacją projektu badawczego własnego p.t. „Opracowanie modelu do analizy i oceny zachowania się statku w czasie katastrofy z wykorzystaniem modelu ryzyka nieprzetrwania kolizji przez statek”, finansowanego przez Ministerstwo Nauki i Szkolnictwa Wyższego (decyzja Nr 5703/B/T02/2010/39). Projekt ten jest realizowany na Politechnice Gdańskiej w latach 2010-2012, pod kierunkiem autora.
Metoda badań oparta jest na wcześniejszych pracach autora, związanych z opracowaniem "Kompleksowej metody oceny bezpieczeństwa statku w stanie uszkodzonym z uwzględnieniem analizy ryzyka" [3]. W pierwszym roku realizacji powyższego projektu przeprowadzono między innymi pracochłonne badania zatapiania dużego modelu fizycznego, których wyniki są i będą weryfikowane za pomocą symulacji komputerowej z użyciem numerycznej mechaniki płynów CFD. Równolegle do powyższych prac rozpoczęto prace nad opracowaniem własnego modelu do analizy i oceny zachowania się statku w czasie katastrofy. Zakończono dotychczas prace związane z modelowaniem zjawisk fizycznych występujących w czasie zatapiania statku. Zaawansowane są prace związane z modelowaniem kształtu kadłuba statku i jego podziałem przestrzennym oraz opracowaniem procedur dotyczących obliczeń w zakresie statyki statku w stanie uszkodzonym. Drugi rok realizacji projektu dotyczy opracowania procedur związanych z obliczeniami w zakresie dynamiki i dynamiki stochastycznej statku w stanie uszkodzonym. Projekt zakończy się opracowaniem tej części modelu, która będzie umożliwiała ocenę ryzyka nieprzetrwania kolizji przez statek w oparciu o opracowany model.
Ocena ryzyka i zarządzanie bezpieczeństwem w czasie katastrofy obiektu … 39
Bibliografia
1. Borysiewicz M., Furtek A., Potempski S.: Poradnik metod ocen ryzyka związanego z niebezpiecznymi instalacjami procesowymi. Instytut Energii Atomowej, Otwock – Świerk 2000.
2. Faltinsen O.M.: Sea loads on ships and offshore structures. Cambridge University Press, Cambridge 1990. 3. Gerigk M.: Kompleksowa metoda oceny bezpieczeństwa statku w stanie uszkodzonym
z uwzględnieniem analizy ryzyka. Monografie 101, Wydawnictwo Politechniki Gdańskiej, Gdańsk 2010. 4. Grabowski M., Merrick J.R.W., Harrald J.R., Mazzuchi T.A., Rene van Dorp J.: Risk modeling
in distributed, large-scale systems. IEEE Transactions on Systems, Man, and Cybernetics - part A: Systems and Humans, Vol. 30, No. 6, November 2000.
5. IMO (International Maritime Organization): Report of the Maritime Safety Committee on Its Eightieth Session, MSC 80/24/Add.1, London, 2005.
6. IMO (International Maritime Organization): Resolution MSC.194(80) Annex 2, Adoption of Amendments to the International Convention for the Safety of Life at Sea, 1974, As Amended, adopted on 20.05.2005.
7. IMO (International Maritime Organization): Resolution MSC.216(82) Annex 2, Adoption of Amendments to the International Convention for the Safety of Life at Sea, 1974, As Amended, adopted on 08.12.2006.
8. IMO (International Maritime Organization): Stability and Seakeeping Characteristics of Damaged Passenger Ships in a Seaway When Returning to Port by Own Power or Under Tow, A survey of residual stability margin, Submitted by Germany, SLF 52/8/1, London, 26 October 2009.
9. Jasionowski A., Vassalos D.: Conceptualising Risk. Proceedings of the 9th International Conference on Stability of Ships and Ocean Vehicles STAB 2006, Rio de Janeiro, 25-29 September 2006.
10. Jędrzejczyk Z., Kukuła K., Skrzypek J., Walkosz A.: Badania operacyjne w przykładach i zadaniach.Wydawnictwo naukowe PWN, Warszawa 2004.
11. Kaliszewski I.: Wielokryterialne podejmowanie decyzji - obliczenia miękkie dla złożonych problemów decyzyjnych. Wydawnictwo Naukowo-Techniczne, Warszawa 2008.
12. Moan T.: Marine structures for the future. Centre for Offshore Research and Engineering, National University of Singapore, CORE Report No. 2003-01, Singapore 2003.
13. Pillay A., Wang J.: Technology and Safety of Marine Systems. Elsevier Ocean Engineering Book Series, Volume 7, Elsevier 2003.
14. Romanowski Cz., Witek Piotr.: Może być strasznie. Budownictwo Okrętowe, nr 3 (548), Marzec 2005, pp. 27-31.
15. Romanowski Cz., Stareńczak P.B.: Co z tym Bałtykiem? Nasze Morze, nr 12 (24), grudzień 2007. 16. Sii H.S., Ruxton T., Wang J.: Novel risk assessment and decision support techniques for safety
management systems. Journal of Marine Engineering and Technology, No. A1, 2002. 17. Skjong R., Vanem E., Rusas S., Olufsen O.: Holistic and Risk Based Approach to Collision Damage
Stability of Passenger Ships. Proceedings of the 9th International Conference on Stability of Ships and Ocean Vehicles STAB 2006, Rio de Janeiro, 25-29 September 2006.
18. Vanem E., Skjong R.: Damage stability and Evacuation Performance Requirements of Passenger Ships. Proceedings of the 9th International Conference on Stability of Ships and Ocean Vehicles STAB 2006, Rio de Janeiro, 25-29 September 2006.
19. Vassalos D.: Safe return to port. Seminar for the 50th session of the IMO SLF Sub-Committee, London, May 2007.
20. http://pl.wikipedia.org/wiki/Kategoria:Katastrofy_morskie.
RISK ASSESSMENT AND SAFETY MANAGEMENT DURING A CATASTROPHE OF AN OCEAN ENGINEERING OBJECT OR SHIP AT SEA
Summary: A method for assessment of safety of the ocean engineering objects and ships in damaged conditions which is based on the object or ship performance and risk assessment. For the assessment of an object or ship performance the investigations using the physical models or computer simulation may

40 Mirosław Gerigk
be applied. It is preferred to use the second approach. For the risk assessment a risk analysis can be used. For example some elements of the Formal Safety Assessment can be implemented. This methodology has been introduced by IMO (International Maritime Organization). The proposed method is based on application of the holistic approach to safety of the objects (ships) where the influence of the design, operational, managerial and human factors on safety is taken into account. The holistic matrix type risk model is applied within the method and it enables to estimate the risk of not surviving taking into account the majority of all the possible scenarios. To make possible to apply the proposed method for assessment of safety of the damaged objects during a disaster at sea a procedure for safety management of an object (ship) should be worked out. It is presented in the paper how to develop the current method to obtain such the procedure. The risk management in the proposed method/procedure is based first of all on the risk assessment and risk management after that. The chosen methods of risk management have been proposed to apply. A proposal of the system of safety assessment of the ocean engineering objects and ships in damaged conditions during a catastrophe at sea is presented. Keywords: risk assessment, safety management, ocean engineering object or ship in damaged conditions