New Bryła w ruchu postępowym, obrotowym i płaskimspakula/wp-content/uploads/10... · 2015. 12....
5
Mechanika - dynamika Bryla w ruchu postępowym, obrotowym i plaskim Bryla w ruchu postępowym, obrotowym i plaskim dr inż. Sebastian Pakula Akademia Górniczo-Hutnicza im. Stanislawa Staszica w Krakowie Wydzial Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki 15 grudnia 2015 e-mail: [email protected] dr inż. Sebastian Pakula – AGH WIMIR Strona 1 \ 5
Transcript of New Bryła w ruchu postępowym, obrotowym i płaskimspakula/wp-content/uploads/10... · 2015. 12....
-
Mechanika - dynamika Bryła w ruchu postępowym, obrotowym i płaskim
Bryła w ruchu postępowym,obrotowym i płaskim
dr inż. Sebastian Pakuła
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie
Wydział Inżynierii Mechanicznej i RobotykiKatedra Mechaniki i Wibroakustyki
15 grudnia 2015
e-mail: [email protected]
dr inż. Sebastian Pakuła – AGH WIMIR Strona 1 \ 5
-
Mechanika - dynamika Bryła w ruchu postępowym, obrotowym i płaskim
Kinematyka bryły:
Ruch obrotowy Ruch obrotowy Ruch płaski
KINEMATYKA
tr
x
y
t
r
x t
1 t
1 t
1R2R
1R2R
2r
1R
2R
M
x t
Kinematyka punktu
l
AV
A
O
Kinematyka w ruchomym ukł. współrzędnych
0 10m
Vs
5m
Vs
A
B
s
Ruch płaski
r
B
C A
S
O
0V0V
0V
0V
0Vr
B
A
S
O
r
r
r
r
C
B
A
S
O
0V
BV
CV
AV
0SV
C
B
A
S
O
V
B
A
S
O0V
0
AV
SV
AV
AV
A
SV 0V
AV
A
O
OV
1
2
O D
C
AV
CV
DV
S
B
BV
A
K
K 1S T
2S T
K
K 1S T
2S T
I II
Kolokwium - kinematyka
A
B
00
l
l O0
0
r
O
A Bl
s t
x
y
2t t
2 0,5s t t m
22s t t m
O
A
7t t
6OA m
l
2
3
2 3
x t
y t t
3
25
8
x t
y t t
A
B
l
l
O
0 const
O t
3R m
s t
R
2 2s t t
7t t
B
h
t
A
0r
O
A Bl
B C D
A E
F
G
r
B
C A
S
O
0ar
B
A
S
O
O
Ba
C
Ba
A
S
O
0V
0Sxa
C
0a
0a
0a
0a
przyspieszenie styczne punktu B względem punktu O
O
Ana
O
Sa
O
Ca
O
Aa O
Sna
O
Cna
O
Bna
przyspieszenie normalne punktu B względem punktu O
Ba
Aa
Sa
gdy toczenie bez poślizgu
0
S Sna a
Zasada superpozycji:
0
0A Aa a a 0 0
0A A Ana a a a
POSTĘPOWY OBROTOWY PŁASKI=+
O O O O
A B C Sa a a a r 0 0 0B B Bna a a
0 0 0
A A Ana a a
0 0 0
S S Sna a a
0 0 0
C C Cna a a
Przyspieszenia styczne:
2O O O O
An Bn Cn Sna a a a r
Przyspieszenia normalne:
B
A
S
O
V
B
A
S
O
V
aB
A
S
O
Va
oa
A
ona
A
oa
oa
a
A
ona Aoa A
oa
V
Aa
22w
ma
s
21u
ma
s
45o
const
y
z
x
x
s t
uv
wa
A
B
O
s
A Bl
0v const
?
?
B
B
v
a
r
r
t
r
r
C
III
I
II
r
t
C
III
I
II
II
B
EV
E
D
DV
EV DV
B
DV
EV
A
B
wv
uv
v
v MM
cora
a
wa
na
1 t
1R2r
3R
A
1
1r
2R2r
r 1
s t
b
a
0V
A
ruch obrotowy
ruch płaski
O1O
S
AV
A
n
AV
O
1O
S
0
AV
A
B
C
AaAVA
B
C
D
E
Rl
l
25t t
A
B
C
t
l
BC AC
B D
AE
const
h
b
v
A
r
B D
A E
const
h
b
KINEMATYKA
tr
x
y
t
r
x t
1 t
1 t
1R2R
1R2R
2r
1R
2R
M
x t
Kinematyka punktu
l
AV
A
O
Kinematyka w ruchomym ukł. współrzędnych
0 10m
Vs
5m
Vs
A
B
s
Ruch płaski
r
B
C A
S
O
0V0V
0V
0V
0Vr
B
A
S
O
r
r
r
r
C
B
A
S
O
0V
BV
CV
AV
0SV
C
B
A
S
O
V
B
A
S
O0V
0
AV
SV
AV
AV
A
SV 0V
AV
A
O
OV
1
2
O D
C
AV
CV
DV
S
B
BV
A
K
K 1S T
2S T
K
K 1S T
2S T
I II
Kolokwium - kinematyka
A
B
00
l
l O0
0
r
O
A Bl
s t
x
y
2t t
2 0,5s t t m
22s t t m
O
A
7t t
6OA m
l
2
3
2 3
x t
y t t
3
25
8
x t
y t t
A
B
l
l
O
0 const
O t
3R m
s t
R
2 2s t t
7t t
B
h
t
A
0r
O
A Bl
B C D
A E
F
G
r
B
C A
S
O
0ar
B
A
S
O
O
Ba
C
Ba
A
S
O
0V
0Sxa
C
0a
0a
0a
0a
przyspieszenie styczne punktu B względem punktu O
O
Ana
O
Sa
O
Ca
O
Aa O
Sna
O
Cna
O
Bna
przyspieszenie normalne punktu B względem punktu O
Ba
Aa
Sa
gdy toczenie bez poślizgu
0
S Sna a
Zasada superpozycji:
0
0A Aa a a 0 0
0A A Ana a a a
POSTĘPOWY OBROTOWY PŁASKI=+
O O O O
A B C Sa a a a r 0 0 0B B Bna a a
0 0 0
A A Ana a a
0 0 0
S S Sna a a
0 0 0
C C Cna a a
Przyspieszenia styczne:
2O O O O
An Bn Cn Sna a a a r
Przyspieszenia normalne:
B
A
S
O
V
B
A
S
O
V
aB
A
S
O
Va
oa
A
ona
A
oa
oa
a
A
ona Aoa A
oa
V
Aa
22w
ma
s
21u
ma
s
45o
const
y
z
x
x
s t
uv
wa
A
B
O
s
A Bl
0v const
?
?
B
B
v
a
r
r
t
r
r
C
III
I
II
r
t
C
III
I
II
II
B
EV
E
D
DV
EV DV
B
DV
EV
A
B
wv
uv
v
v MM
cora
a
wa
na
1 t
1R2r
3R
A
1
1r
2R2r
r 1
s t
b
a
0V
A
ruch obrotowy
ruch płaski
O1O
S
AV
A
n
AV
O
1O
S
0
AV
A
B
C
AaAVA
B
C
D
E
Rl
l
25t t
A
B
C
t
l
BC AC
B D
AE
const
h
b
v
A
r
B D
A E
const
h
b
KINEMATYKA
tr
x
y
t
r
x t
1 t
1 t
1R2R
1R2R
2r
1R
2R
M
x t
Kinematyka punktu
l
AV
A
O
Kinematyka w ruchomym ukł. współrzędnych
0 10m
Vs
5m
Vs
A
B
s
Ruch płaski
r
B
C A
S
O
0V0V
0V
0V
0Vr
B
A
S
O
r
r
r
r
C
B
A
S
O
0V
BV
CV
AV
0SV
C
B
A
S
O
V
B
A
S
O0V
0
AV
SV
AV
AV
A
SV 0V
AV
A
O
OV
1
2
O D
C
AV
CV
DV
S
B
BV
A
K
K 1S T
2S T
K
K 1S T
2S T
I II
Kolokwium - kinematyka
A
B
00
l
l O0
0
r
O
A Bl
s t
x
y
2t t
2 0,5s t t m
22s t t m
O
A
7t t
6OA m
l
2
3
2 3
x t
y t t
3
25
8
x t
y t t
A
B
l
l
O
0 const
O t
3R m
s t
R
2 2s t t
7t t
B
h
t
A
0r
O
A Bl
B C D
A E
F
G
r
B
C A
S
O
0ar
B
A
S
O
O
Ba
C
Ba
A
S
O
0V
0Sxa
C
0a
0a
0a
0a
przyspieszenie styczne punktu B względem punktu O
O
Ana
O
Sa
O
Ca
O
Aa O
Sna
O
Cna
O
Bna
przyspieszenie normalne punktu B względem punktu O
Ba
Aa
Sa
gdy toczenie bez poślizgu
0
S Sna a
Zasada superpozycji:
0
0A Aa a a 0 0
0A A Ana a a a
POSTĘPOWY OBROTOWY PŁASKI=+
O O O O
A B C Sa a a a r 0 0 0B B Bna a a
0 0 0
A A Ana a a
0 0 0
S S Sna a a
0 0 0
C C Cna a a
Przyspieszenia styczne:
2O O O O
An Bn Cn Sna a a a r
Przyspieszenia normalne:
B
A
S
O
V
B
A
S
O
V
aB
A
S
O
Va
oa
A
ona
A
oa
oa
a
A
ona Aoa A
oa
V
Aa
22w
ma
s
21u
ma
s
45o
const
y
z
x
x
s t
uv
wa
A
B
O
s
A Bl
0v const
?
?
B
B
v
a
r
r
t
r
r
C
III
I
II
r
t
C
III
I
II
II
B
EV
E
D
DV
EV DV
B
DV
EV
A
B
wv
uv
v
v MM
cora
a
wa
na
1 t
1R2r
3R
A
1
1r
2R2r
r 1
s t
b
a
0V
A
ruch obrotowy
ruch płaski
O1O
S
AV
A
n
AV
O
1O
S
0
AV
A
B
C
AaAVA
B
C
D
E
Rl
l
25t t
A
B
C
t
l
BC AC
B D
AE
const
h
b
v
A
r
B D
A E
const
h
b
Dynamiczne równania ruchu:m~a = ~F I~ω = ~M m~a = ~F
I~ω = ~M
Przykład:Oblicz przyspieszenie środka masy krążka, który jest ciągnięty za pomocą nawiniętej naniego liny z siła F .
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r r
m m1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
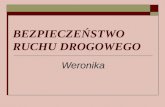
Dane: m, r, F
Szukane: a
Toczący się krążek bez poślizgu jest przykładem ruchu płaskiego. Oznaczamy współrzędneopisujące ruch płaski, uwalniamy układ od więzów i rysujemy siły oddziałujące na bryłę.
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r r
m m1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
x – współrzędna środka masy
ϕ – współrzędna kątowa obrotu bryły
T – siła tarcia
F – siła naciągu liny
Następnie zapisujemy dynamiczne równania ruchu bryły:
{mẍ = F − TIϕ̈ = Fr + Tr
gdzie: I = mr2
2 – moment bezwładności krążka względem głównej centralnej osi bezwład-ności.
dr inż. Sebastian Pakuła – AGH WIMIR Strona 2 \ 5
-
Mechanika - dynamika Bryła w ruchu postępowym, obrotowym i płaskim
Tworzymy równania więzów, wiążące ruch środka masy x z ruchem obrotowym ϕ. Rów-nanie to możemy napisać tylko w przypadku toczenia bez poślizgu!x = ϕrẍ = ϕ̈rPodstawiamy ϕ̈ = ẍ
ri moment bezwładności I do drugiego z układu równań i dzieląc
obustronnie przez r otrzymujemy:mẍ = F − Tm
2ẍ = F + T
Dodając następnie stronami i mnożąc przez 23 otrzymujemy:ẍ = 43FNa podstawie równania więzu możemy też wyznaczyć przyspieszenie kątowe:ϕ̈ = 43Fr
dr inż. Sebastian Pakuła – AGH WIMIR Strona 3 \ 5
-
Mechanika - dynamika Bryła w ruchu postępowym, obrotowym i płaskim
Zestaw zadań:Zad.1: 1. Wyprowadź różniczkowe równania ruchu oraz zapisz kinematyczne równaniawięzów dla układu przedstawionego na poniższym rysunku. Która z brył stoczy się szybciejz równi pochyłej?
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r rm m
1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
k
l
l
l
k
m
M
e
m
F
06
0 0
,m l
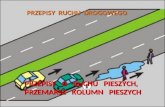
Zad.2: Pręt o masie m i długości 2l może wykonywać niewielkie obroty w płaszczyź-nie pionowej. Do pręta zamocowano dwie sprężyny o sztywności k. Wyznacz różniczkowerównania ruchu przedstawionego układu.
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r rm m
1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
k
2l
l
l
k
m
M
e
m
F
06
0 0
,m l
Dane: m, k, l
Szukane: równanie różniczkowe ruchu
dr inż. Sebastian Pakuła – AGH WIMIR Strona 4 \ 5
-
Mechanika - dynamika Bryła w ruchu postępowym, obrotowym i płaskim
Zad.3: Wibrator mechaniczny o masie m i promieniu bezwładności ρ jest napędza-ny stałym momentem M . Wyznacz równanie ruchu wibratora, który przymocowano dosztywnego fundamentu. Środek masy wibratora jest oddalony od osi obrotu o e.
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r rm m
1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
k
l
l
l
k
m
M
e
m
F
06
0 0
,m lDane: m, ρ,′M ′, e
Szukane: ϕ(t)
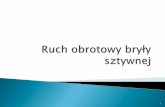
Zad.4: Pręt o masie m i długości l jest przymocowany przegubowo do nieważkich suwa-ków. Wyznacz równanie ruchu pręta ϕ(t) przy założeniu, że porusza się on w płaszczyźniepoziomej pod wpływem siły F przyłożonej do jednego z suwaków (jak na rysunku).
hH
bezmasowe krążki
G
R
h
m
m
aa
m
k
P
m m
k
P
ω
x
mA B
CDE
x
s=?
α
R
m
AB
CD E
b
kR
α
l
x=?
b
m
x
F
φ
x
Fbez poślizgu
T
b
x
z
a
Q
F
0 10m
Vs
5m
Vs
A
B
s
const
x
y
x
z
r
B
C A
S
O
r
B
A
S
O
0V
r
r
r
r
B
A
S
O
BV
CV
AV
0SV
C
C
B
A
S
O0V
0
AV
B
A
S
O
AV
SV
AV
AV
A
SV 0V
OV
1
2
AV
A
O D
C
AV
CV
DV
S
O
B
BV
A
0V
A
ruch obrotowy
ruch płaski
AV
A
ruch obrotowy
ruch płaski
AV
n
AV
OO
1O1O
S S
A
1O
S
r
x
r
AV
n
AV
0
AV
m
0V
RG
h
m
x
k
1P
2P
3P
1N 2N
t
a
α
m
m
F
0V
0nV
Rv
dmV
dmVRdt
l
Q
G
m
oV
R
Rr
1m
1m
2m
1S
N
T
1m g
2m
2m g
2S
1x
2x
Rr
2S
1S
mbF
mg
2S
P
2S
1S
pS
2S
x
y
la
m
N
bF
mg
2
1
R
x
1m
2m
k
m
l2
l
2
l
k k
x
0U
h
m
k
1O
C
sina t
k
1O
C
x
m
x
m h
2r
A
B
kA
B
l
m
nN
mg
m
R
G x
r r
ll
m
x
Zasada ruchu środka masy
2l
m
M
m
G
l
2Q
l1Q
Kolokwium I - dynamika
M
F
M
F
1m
2m
a
b
M
a
0
m
0
m m
a
y
xm
D
AB
C
y
l
m
xy
m
zN
uF
mg
yz
l
yN
corF
T
G
y
x
ua
Ruch złożony
y
m
const
a
b
O
B
A
ll
Dynamiczne układów o zmiennej masie:
Q
R
P
x
- ciężar jednostkowy liny
x
wv
R
x
Praca, moc, energia
α
ba r
μ
oM
x ba rS
zF
zF
oMR
P
N T
M
R
m
Zasady zachowania i równoważności
energii kinetycznej i pracy
l
A
B
m
Rh
h
l
C
BA
x
m r
m
h
1m
r
2m
l
1
A
O
2
V
B
C
Kolokwium I - dynamika
y
mk
m
0V
m
h
x
m
h
0V
l
h
a
y
m
l
a
Dynamika ruchu w układach złożonych
M
R
m
m
a
bb
a
k
P
Px
I
Rr
1m
2m
1S
N
T
1m g2m g
2S1x
2x
Rr
2m1m
1S
2S
Rr
rr
bezmasowe krążki
1,m
2m
0V
0V
0V
r rm m
1m
4m
2m
3m
2x
4x
3
3x
1x
4m
3m
2 2,m R
1r
1,m
1R
Dynamika punktu materialnego
h
1R
2 2,m I
1m
2R
3 3,m r
4m
r
1m
2m R
3m
F
2 2 2, , ,m r R
3m
oM
3 3,m R
k
m
l2
l
2
l
k k
x
1R
2 2,R r
1r 3r
2R
2r
4r
4l
2l
3l
1R 2R 4l
2l
3l
2R1R
1R
3R
l
3r
4r
1r1R
2R
1r 3r
2R
2r
4r
l 2l
4m
1m
3m
2m 2r
3r3k
1k
2k
Równania więzów
Równania Lagrange a II rodzaju
r
m
x
r
1m
2m R
F
1x
2x
3m
r
Kolokwium II (pęd,kręt,ukł. złożone)
h
0v
/ 2l
ll
x
y
r
3m
2m
1m
r
R
3m
2m
1 1,m I
3m
4m
2m
5m
0
2 2,m I
4m
5m
1m 3m
R
l
?s
E D
B
C
RC
ED
?x
m
B
x
k
m
k
A
A
gg
Kolokwium I poprawkowe
M
F
s
?l
opór powietrza
zaniebać
h
r
k
ma
A
B
g
1 1,I r2 2,I r
2 2 2, ,I r R
4m
0
3m
1 1 1, ,m I r
wvm
l
M
l
wvm
M
k
Kolokwium II poprawkowe
r
m
r
m
s t
m
r
h
0 ?I
3
4
SR
r
,I m
m
xr
g
2 2,m I
1I 3I
5m
4 4,m I
2 2 2 2, , ,m I R r 3 3 3 3, , ,m I R r
4 4 4, ,m I R
1 1 1 1, , ,m I R r
Kolokwium III poprawkowe
m
R k vg
?h
0v
2 2 2, ,I r R
3m
1mA
B
C
h
?l
0
0
m
m
Kolokwium IV poprawkowe
xua
r
R
s t
m
1 1 1 1, , ,J m R r
2 2,J R3 3 3, ,J m R
Kolokwium V zestaw prostych
m
?M
l x
m Ml
kM
m
0v
Mm
M
m
h
0 maxh
x
k
r
m
g
m
m
gJ
0v
h
maxh
maxx
L
g
1t
N
R
G
0v
P
AB
D C
O
l
P
1P
A
B C
D
1s
2s
l
1r
O
M
1m
r2m
x
B
A
C
l
g
1 1 1 1, , ,I m R r
2 2 2, ,I m R
g
R
mv
x
l
v
l
Ruch postępowy Ruch obrotowy
Ruch płaski
1 1 1 1, , ,I m R r
2 2,I R3 3,I R
m
m
1 1 1 1, , ,I m R r
2 2,I R
3 3 3, ,I m R
m
M
2 2,I R
3 3 3, ,I m R
20F N4m
0.3
4 8m kg
ua G
mm
m m
Q
G
a
m
Mh
l l
x
l
m
R
0v2 2,m r
3 3,m r
1 1,m r
h0M
0
1
V
m
Zasada zachowania i zmienności pędu
kv
km
0,8m kg
0V 1V2V
1,2M kg
1v
2v
wvM
2vm
wv
Zasada zachowania i zmienności Krętu
u
y
km
l
a rm
m
20,3I MR
R
0,5M t
l
2dmv1dmv
Fdt
xF dt
yF dt
v
mm
R
M
m
m
v
D
φ
x
F
T
Ftoczenie bez
poślizgu
m
r
k
l
l
l
k
m
M
e
m
F
06
0 0
,m l
Dane: m, l, F, ϕ(0), ϕ̇(0)
Szukane: ϕ(t)
dr inż. Sebastian Pakuła – AGH WIMIR Strona 5 \ 5