MODELOWANIE I ANALIZA UKADU DO OBSUGI MODUÓW … · (urzdzenie zaprojektowane i wyprodukowane...
12
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 78 Transport 2011 Marek Szczotka Wydzia Zarzdzania i Informatyki Akademia Techniczno-Humanistyczna MODELOWANIE I ANALIZA UKADU DO OBSUGI MODUÓW INSTALOWANYCH NA DNIE MORZA Rkopis dostarczono, marzec 2011 Streszczenie: W pracy przedstawiono model ukadu przeznaczonego do instalacji offshore moduów niezbdnych do transportowania ropy i gazu z odwiertów w dnie morskim. System jest montowany na specjalnych jednostkach pywajcych, wyposaonych w ukady dynamicznego pozycjonowania. Jednym z istotniejszych elementów ukadu jest system AHC (Active Heave Compensation), który kompensuje ruchy statku spowodowane falowaniem. Zastosowano uproszczony ukad pneumatyczno- hydrauliczny, wraz z odpowiednimi algorytmami sterowania prac wcigarek. adunek jest opuszczany na dno za pomoc wcigarki z kompensacj. Zamodelowano równie dodatkowe liny prowadzce adunek. Przedstawiono wyniki przykadowych oblicze numerycznych, dla ukadu pracujcego w zadanych warunkach, przy wczonym oraz wyczonym ukadzie prowadzenia moduu w trakcie instalacji. Sowa kluczowe: urzdzenia offshore, instalacja moduów, modelowanie 1. SYSTEMY DO TRANSPORTU MODUÓW (MHS) Nieustajcy rozwój gospodarek wielu krajów wiata generuje zwikszone zapotrzebowanie na surowce energetyczne. Dlatego ju od kilku dekad znaczca cz energii pochodzi ze róde znajdujcych si pod dnami mórz i oceanów. Ich wydobycie staje si coraz bardziej kosztowne, poniewa istniejce zasoby w akwenach o maych gbokociach (do kilkuset metrów) s ju eksploatowane od duszego czasu. Nowe zoa ropy i gazu ziemnego, dla których powstaje obecnie wikszo infrastruktury zwizanej z ich eksploatacj, charakteryzuj si wikszymi wymaganiami w stosunku do systemów budowanych w minionych dekadach: du gbokoci (2000m i wicej), wysokim stanem mórz i oceanów, przy których prace wydobywcze musz by prowadzone w sposób cigy, a take silnymi prdami morskimi i niskimi temperaturami (obszary arktyczne). Coraz bardziej ekstremalne warunki wymagaj coraz wikszych nakadów przy jednoczesnym skróceniu czasu eksploatacji pól (s one czsto coraz mniejsze i coraz bardziej rozproszone) oraz obsugujcych ich urzdze. Czynnik ten bdzie w znacznym stopniu
Transcript of MODELOWANIE I ANALIZA UKADU DO OBSUGI MODUÓW … · (urzdzenie zaprojektowane i wyprodukowane...

P R A C E N A U K O W E P O L I T E C H N I K I W A R S Z A W S K I E J z. 78 Transport 2011
�
Marek Szczotka
Wydzia� Zarz�dzania i Informatyki Akademia Techniczno-Humanistyczna
MODELOWANIE I ANALIZA UK�ADU DO OBS�UGI MODU�ÓW INSTALOWANYCH
NA DNIE MORZA
R�kopis dostarczono, marzec 2011
Streszczenie: W pracy przedstawiono model uk�adu przeznaczonego do instalacji offshore modu�ów niezb�dnych do transportowania ropy i gazu z odwiertów w dnie morskim. System jest montowany na specjalnych jednostkach p�ywaj�cych, wyposa�onych w uk�ady dynamicznego pozycjonowania. Jednym z istotniejszych elementów uk�adu jest system AHC (Active Heave Compensation), który kompensuje ruchy statku spowodowane falowaniem. Zastosowano uproszczony uk�ad pneumatyczno-hydrauliczny, wraz z odpowiednimi algorytmami sterowania prac� wci�garek. �adunek jest opuszczany na dno za pomoc� wci�garki z kompensacj�. Zamodelowano równie� dodatkowe liny prowadz�ce �adunek. Przedstawiono wyniki przyk�adowych oblicze� numerycznych, dla uk�adu pracuj�cego w zadanych warunkach, przy w��czonym oraz wy��czonym uk�adzie prowadzenia modu�u w trakcie instalacji. S�owa kluczowe: urz�dzenia offshore, instalacja modu�ów, modelowanie
1. SYSTEMY DO TRANSPORTU MODU�ÓW (MHS)
Nieustaj�cy rozwój gospodarek wielu krajów �wiata generuje zwi�kszone zapotrzebowanie na surowce energetyczne. Dlatego ju� od kilku dekad znacz�ca cz�� energii pochodzi ze róde� znajduj�cych si� pod dnami mórz i oceanów. Ich wydobycie staje si� coraz bardziej kosztowne, poniewa� istniej�ce zasoby w akwenach o ma�ych g��boko�ciach (do kilkuset metrów) s� ju� eksploatowane od d�u�szego czasu. Nowe z�o�a ropy i gazu ziemnego, dla których powstaje obecnie wi�kszo� infrastruktury zwi�zanej z ich eksploatacj�, charakteryzuj� si� wi�kszymi wymaganiami w stosunku do systemów budowanych w minionych dekadach: du�� g��boko�ci� (2000m i wi�cej), wysokim stanem mórz i oceanów, przy których prace wydobywcze musz� by prowadzone w sposób ci�g�y, a tak�e silnymi pr�dami morskimi i niskimi temperaturami (obszary arktyczne). Coraz bardziej ekstremalne warunki wymagaj� coraz wi�kszych nak�adów przy jednoczesnym skróceniu czasu eksploatacji pól (s� one cz�sto coraz mniejsze i coraz bardziej rozproszone) oraz obs�uguj�cych ich urz�dze�. Czynnik ten b�dzie w znacznym stopniu

86 Marek Szczotka
�
wp�ywa� mi�dzy innymi na ceny paliw w nast�pnych latach. Z drugiej strony, te trudne warunki pracy wymuszaj� szybki rozwój technologii �rodków transportu i maszyn, niezb�dnych do funkcjonowania bran�y wydobywczej. Bezawaryjna praca tych urz�dze, niejednokrotnie w trudnych warunkach pogodowych (silne falowanie, pr�dy morskie oraz wiatr), wymaga specjalnego podej�cia do zagadnie niezawodno�ci i bezpieczestwa [1-3].
Cz�stym rozwi�zaniem przy ró�norodnych pracach prze�adunkowych jest stosowanie �urawi offshore, montowanych na statkach i platformach. Maszyny te nale�� do najbardziej efektywnych i uniwersalnych, charakteryzuj� si� licznymi zaletami. Jednak nie zawsze tego typu urz�dzenie jest najodpowiedniejsze do wykonania pewnych prac, poza tym ich cena jest bardzo wysoka. Ponadto �urawie cz�sto w tym samym czasie wykonuj� inne zadania, wi�c zachodzi potrzeba u�ycia drugiego d�wigu. W artykule przedstawiono dedykowany system do opuszczania i podnoszenia modu�ów u�ywanych przy eksploatacji morskich ruroci�gów na polach naftowych i gazowych. Mo�e on stanowi alternatyw� dla �urawi, dzi�ki dostosowaniu konstrukcji do specyfiki prac instalacyjnych. W szczególno�ci mo�e umo�liwia prowadzenie �adunku za pomoc� uk�adów dodatkowych lin i wci�garek, co jest trudne stosuj�c klasyczny �uraw.
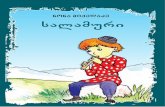
W pracy krótko omówiono model systemu MHS (Multi-purpose Handling System), który jest wyposa�ony w uk�ad wci�garek z systemami AHC, a tak�e zawiera wci�garki pomocnicze, stosowane do prowadzenia �adunku. Poni�ej na Rys. 1 przedstawiono widok urz�dzenia.
Rys. 1. Widok systemu MHS od strony torowiska umo�liwiaj�cego poziomy transport modu�ów (urz�dzenie zaprojektowane i wyprodukowane przez AXTech AS)
Struktura no�na („wie�a”) stanowi rodzaj konstrukcji ramowej, na której zamocowano
wci�garki dla lin prowadz�cych, g�ówn� wci�gark� z uk�adem AHC, kabin� sterownicz� oraz wiele innych komponentów dodatkowych (kr��ki, szyny mechanizmu jazdy ramy prowadz�cej �adunek, ci�gi komunikacyjne, oprzyrz�dowanie steruj�ce). MHS zosta�
wci�garki��
kabina�sterowania
moonpool
wózek�transportowy

Modelowanie i analiza uk�adu do obs�ugi modu�ów instalowanych na dnie morza 87
�
zamontowany na statku uczestnicz�cym w pracach instalacyjnych i obs�udze wydobycia ropy i gazu, przy czym do stosowania omawianego systemu niezb�dny jest specjalny kana� w kad�ubie statku (moonpool). Modu�y s� opuszczane i podnoszone z dna przez ten kana�, posiadaj�cy mi�dzy innymi w�a�ciwo�ci eliminuj�ce efekty dynamiczne pojawiaj�ce si� podczas przechodzenia �adunku przez lustro wody. Wykonanie podobnej operacji za pomoc� klasycznego �urawia offshore (a wi�c w przypadku kiedy �adunek jest opuszczany przez lustro wody poza obrysem kad�uba), wymaga znacznie wi�kszego zapasu ud�wigu �urawia, poniewa� operacje takie cechuj� si� znacznie wi�kszymi si�ami dynamicznymi. Zatem, przy tych samych warunkach pogodowych, prezentowany MHS wymaga mniejszych no�no�ci ni� wymaga�by �uraw pok�adowy. Modu�y s� transportowane po pok�adzie statku z hangaru (znajduj�cego si� w innej cz��ci pok�adu) do wie�y, wykorzystuj�c specjalne wózki i system szyn.
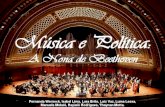
Rys. 2. MHS od strony generatora i wci�garki z uk�adem automatycznej kompensacji Przedstawiony w pracy uk�ad jest przeznaczony do opuszczania modu�ów o wymiarach
6.5m x 6.5m x 8m, na g��boko� do 1500m. Maksymalna zdolno� kompensacji falowania zostaje osi�gni�ta przy wysoko�ci fal 5.0m. Ca�kowita masa w�asna urz�dzenia to 120t (wraz z osprz�tem i linami). Centraln� cz��ci� systemu jest specjalnie zaprojektowany uk�ad nap�dowy dla wci�garek (Rys. 2): g�ównej z uk�adem AHC o ud�wigu nominalnym 35t, dwóch specjalnych dla utrzymania sta�ego naci�gu lin prowadz�cych modu� w trakcie podnoszenia, obs�uguj�cej ram� prowadz�c� modu� przez kad�ub statku (zabezpieczenie przez uderzeniami o �ciany boczne) oraz pomocnicze dla obs�ugi pomostu zamykaj�cego moonpool i kurtyn bocznych. Podstawow� funkcj� nap�du wci�garki z systemem AHC jest zapobieganie przed uderzeniem �adunku o dno w czasie jego podnoszenia i opuszczania. Wci�garka kompensuje ruchy nurzania i ko�ysania statku spowodowane falowaniem, poprzez odpowiedni dobór d�ugo�ci liny. Klasyczny uk�ad AHC wci�garki z nap�dem elektrycznym opisano mi�dzy innymi w pracy [4].
W niniejszej pracy przedstawiono model matematyczny umo�liwiaj�cy symulacj� jednej z mo�liwych operacji wykonywanych za pomoc� MHS. Skupiono si� na operacji podnoszenia i opuszczania �adunku przy dodatkowym istnieniu lin prowadz�cych.
wci�garka�AHC�35t
HPU�

88 Marek Szczotka
�
W analizie uwzgl�dniono efekty dynamiczne wywo�ane zarówno ruchem unoszenia statku w wyniku jego ruchu podczas falowania morza, ale tak�e oddzia�ywania lin. Wymuszenia pochodz� tak�e od si� hydrodynamicznych spowodowanych pr�dko�ciami cz�steczek wody (od falowania i pr�dów morskich).
2. PODSTAWOWE ZA�O�ENIA I OPIS MODELU UK�ADU
Model matematyczny, umo�liwiaj�cy symulacj� pracy uk�adu i ocen� wp�ywu wybranych parametrów na zachowanie si� �adunku i powstaj�ce w uk�adzie si�y dynamiczne, zbudowano uwzgl�dniaj�c poni�sze za�o�enia:
� ruch statku powsta�y w wyniku falowania morskiego traktuje si� jako znany
i opisany dowoln� funkcj� zale�n� od czasu i parametrów stanu morza i jednostki p�ywaj�cej,
� nie uwzgl�dnia si� podatno�ci struktury no�nej wie�y oraz pok�adu statku, � nap�d wci�garek lin prowadz�cych zapewnia wzgl�dnie sta�y naci�g lin,
realizowany przez dostarczenie sta�ego ci�nienia oleju do silników, � wci�garka g�ówna posiada hybrydowy uk�ad nap�dowy (hydro-pneumatyczny),
natomiast pr�dko� obrotowa b�bna jest wymuszana kinematycznie, � uwzgl�dnia si� podatno� lin prowadz�cych oraz podatno� g�ównej liny no�nej,
poprzez jej dyskretyzacj� metod� sztywnych elementów skoczonych (SES), � �adunek traktuje si� jako bry�� sztywn� o sze�ciu stopniach swobody, � prowadnice �adunku mog� by traktowane jako elementy spr��ysto-t�umi�ce
o dowolnie definiowalnych charakterystykach. Ruch statku, na którym zamontowane jest urz�dzenie, jest okre�lony je�li znane s�
sk�adowe wektora Dq , b�d�ce wspó�rz�dnymi uogólnionymi statku:
� �� �zsD THt ,,RAOfq � (1) gdzie: zS TH , - charakterystyczna wysoko� i okres fali,
�TDDDDDDD zyx �� �q - wspó�rz�dne okre�laj�ce ruch statku, � � � �ttxx DDDD �� �� ,..., , gdzie DDD zyx ,, s� przemieszczeniami jednostki
wzd�u� osi uk�adu bezw�adno�ciowego, natomiast k�ty DDD �� ,, s� k�tami obrotu Eulera ZYX wzgl�dem tego� uk�adu,
� �RAO - funkcje przej�cia statku (Response Amplitude Operators). Schemat uk�adu przedstawiono na rysunku 3.

Modelowanie i analiza uk�adu do obs�ugi modu�ów instalowanych na dnie morza 89
�
Rys. 3. Schemat uk�adu MHS Poniewa� za�o�ono, �e konstrukcja no�na („wie�a”) jest nieodkszta�calna, trajektorie
ruchu kr��ków mo�na wyznaczy stosuj�c przekszta�cenia jednorodne. Zatem ruch elementu liny stycznego do kr��ka zamocowanego na wie�y mo�na okre�li za pomoc� operacji [5]:
� � lsDls t ,
)0(, rTr �!� (2)
gdzie: )0(
,lsr - wspó�rz�dne punktu zej�cia liny z kr��ka w uk�adzie globalnym }0{ , constls ��,r - znane wspó�rz�dne w uk�adzie statku }{D , DT - macierz transformacji jednorodnej wspó�rz�dnych z uk�adu }{D do }0{ . Macierz transformacji jednorodnych jest zdefiniowana zgodnie z konwencj� k�tów
ZYX Eulera, w sposób podany w [5]. Liny prowadz�ce �adunek, jak równie� g�ówn� lin� no�n�, dyskretyzowano za pomoc�
metody sztywnych elementów skoczonych, która szczegó�owo opisana jest w monografii [6]. Pojedynczy sztywny element skoczony )(l
ises jest opisany przez wspó�rz�dne uogólnione (Rys. 4):
�Tli
li
li
li
li
li
li zyx )()()()()()()(~ �� �q (3)
gdzie: )()()( ,, l
il
il
i zyx - przemieszczenia elementu i w uk�adzie }{D , )()()( ,, l
il
il
i �� - k�ty obrotu Eulera elementu wzgl�dem uk�adu }{D ,
y
z � }0{x
}{L
moonpool
liny�prowadz�ce�
lina�g�ówna�
wie�a�
kr��ek�liny�g�ównej�
}{D
modu��
v�
a�
ruch�cz�stek�wody�
dno�
profil�fali�

90 Marek Szczotka
�
l - numer liny prowadz�cej �adunek (w pracy zak�adano 2,1�l ).
Rys. 4. Dyskretyzacja metod� sztywnych elementów skoczonych a) sztywny element skoczony )(l
ises fragmentu liny l (przed deformacj�) b) uk�ad po deformacji: odkszta�cenie liniowe )(~ l
ir" i k�towe )(~ li�" elementu )(l
iest Deformacja elementu spr��ysto-t�umi�cego )(l
iest umo�liwia, po przyj�ciu odpowiedniego modelu materia�u, wyznaczenie si� i momentów si� wyst�puj�cych w po��czeniu elementów )(
1l
ises i )(lises liny. Uzewn�trznienie si� i momentów si�
wynikaj�cych z odkszta�ce elementów, w odró�nieniu od obliczania sk�adników równa ruchu pochodz�cych od energii potencjalnej odkszta�ce spr��ystych, pozwala na modelowanie dowolnych, nieliniowych charakterystyk spr��ystych i spr��ysto-plastycznych materia�u [7].
Transformacji wspó�rz�dnych z uk�adu lokalnego, zwi�zanego ze sztywnym elementem skoczonym )(l
ises , dokonuje si� stosuj�c podobnie przekszta�cenie:
� � � � )(,
)()(,
)()(0
~)( lloci
li
lloci
li
liDD t rBrqTqTr !�!!� (4)
gdzie: �Tzyx 10000 �r - wektor wspó�rz�dnych w uk�adzie bezw�adno�ciowym,
�Tlloci
lloci
lloci
lloci zyx 1)(
,)(
,)(
,)(
, �r - wektor wspó�rz�dnych w uk�adzie lokalnym,
� �)()( ~~ li
li qT -
macierz transformacji z uk�adu lokalnego )(lises
do uk�adu statku }{D .
)a
)(ˆ lix
)(ˆ liz
)(ˆ liy
)({} li
)(lises
)(1
lises
)(1
lises �
)(liest
)(1
liest �
)(ˆ liy�
)(ˆ liz� )(ˆ l
ix�
)(1ˆ l
iy ��
)(1ˆ l
iz �� )(1ˆ l
ix ��
)(~ lir"
)(,
~ liLr �
)(1,
~ liR �r
)b)(1
lises
)(ˆ liy
)(ˆ liz
)({} li
)(ˆ lix
)(lises
)(ˆ liz�
)(ˆ liy�)(ˆ l
ix�
)(1{} l
i)(1ˆ l
iy
)(1ˆ l
iz
)(1ˆ l
ix
x
y
z }0{
)()()( ,, li
li
li zyx
)(~ li�"

Modelowanie i analiza uk�adu do obs�ugi modu�ów instalowanych na dnie morza 91
�
Równania ruchu liny prowadz�cej l wyprowadzono z równa Lagrange’a II rodzaju:
)(
)()()( l
klk
lk
lk Q
qD
qV
�##
�##
��
$ (5)
gdzie: )()()(
lk
lk
lk q
TqT
dtd
##
##
��
$ - operator Lagrange’a,
E , V - energia kinetyczna i potencjalna, D - funkcja dyssypacji energii, )(l
kQ - niepotencjalna si�a uogólniona,
lnk ,...,0� , - ln jest liczb� elementów skoczonych. �
Równania ruchu elementu )(lkses mo�na zapisa w postaci:
�
� �Dl
kl
kl
kl
kl
kl
k t qqqqqFqA ,~,~,~,~,~ )(1
)(1
)()()()(��! ��� (6)
gdzie: ���
�
���
�� )(
)()(
lk
lkl
k A00MA - macierz mas,
% &)()()()( ,, lk
lk
lk
lk mmmdiag�M - podmacierz 3x3 o sta�ych elementach,
)(lkm , )(
,)(,
)(, ,, l
kzlky
lkx III - masa i momenty bezw�adno�ci )(l
kses ,
� �)()()()()( ,, lk
lk
lk
lk
lk �� AA � -
podmacierz 3x3 o zmiennych elementach (zale�nych od )(l
k , )(lk� , )(l
k� ),
� )(lkF � ��
wektor prawych stron zawieraj�cy sk�adowe od si� uogólnionych, ruchu unoszenia, si� ci��ko�ci itp.
�Warunki pracy urz�dzenia okre�laj�, �e element )(l
nlses jest zamocowany na dnie morza.
W modelu realizuje si� to poprzez uwzgl�dnienie równania: �
constllocn
ln
ln lll
'!� )(,
)()(0, rBr . (7)
�Równanie (7) reprezentuje po��czenie kuliste, ��cz�ce )(l
nlses z dnem w punkcie
o wspó�rz�dnych lokalnych okre�lonych w )(,
llocnl
r .
Element )(0lses jest obci��ony si�� w linie prowadz�cej. Ruch b�bna wci�garki
prowadz�cej okre�lony jest wspó�rz�dn� uogólnion� )(lGW� , któr� wyznacza si� z równania:
�
)()()()()( lGW
ll
lconst
lGW
lGW rFTI �� (8)
gdzie: )(l
GWI - masowy moment bezw�adno�ci b�bna wci�garki,

92 Marek Szczotka
�
)(lconstT - sta�y moment nap�dowy,
)(lGWr - promie podzia�owy,
)(llF - si�a w linie l .
�Zak�ada si�, i� �adunek jest bry�� sztywn� o sze�ciu stopniach swobody. Jego ruch jest
okre�lony w uk�adzie bezw�adno�ciowym przez równania ruchu wyprowadzone równie� z równa Lagrange’a II rodzaju: �
� �LLLLL t qqFqA ��� ,,� (9)
gdzie: � �6,...,1,
)(, �
�jk
LjkL aA ,
()*
+,-�
TLj
LLk
Ljk tra )()()()(
, BHB ,
)(LH jest macierz� pseudo-masow�, �TLLLLLLL zyx �� �q ,
)(
)()(
Lk
LL
k q##
�BB , )(LB - macierz transformacji z }{L do }0{ ,
LF - wektor prawych stron równa ruchu. �
�adunek opuszczany jest za pomoc� liny g�ównej. Aby ograniczy wp�yw pr�dów morskich, stosuje si� prowadzenie �adunku z wykorzystaniem dodatkowych lin, Rys. 5. �
}0{
)1(lF
)2(lF
modu�
lina no�na
lina prowadz�ca lina
prowadz�ca
prowadnicapr�dy morskie,fale
przeguby kuliste
Lx
Lz
Ly
��
Rys. 5. �adunek (modu�) opuszczany przy wykorzystaniu lin prowadz�cych �
W celu okre�lenia si� dzia�aj�cych na �adunek oraz lin� l , za�o�ono, �e prowadnice posiadaj� sztywno� i t�umienie w kierunkach osi Lx oraz Lz . Obliczaj�c wspó�rz�dne pocz�tku i koca )(l
ises b�d�cego w kontakcie z prowadnic�: �
�Taaal
locail
ilia zyx 1)(
,,)()(
, �� rBr (10.1)
�Tbbbl
locbil
ilib zyx 1)(
,,)()(
, �� rBr (10.2)
gdzie: �Tlllocai
li 1002
)(,,
)(�r , �Tll
locbil
i 1002)(,,
)(�r ,

Modelowanie i analiza uk�adu do obs�ugi modu�ów instalowanych na dnie morza 93
�
oraz zak�adaj�c wspó�rz�dn� 0,Ly okre�lon� przez: � )()(
0,L
kL
Ly rB� !� (11) gdzie: �0010�� , )(L
kr - wektor wspó�rz�dnych prowadnicy w uk�adzie }{L , )(,...,1 L
pnk � , )(Lpn - liczba prowadnic,
�mo�na wyznaczy si�y wynikaj�ce z odkszta�ce prowadnicy z zale�no�ci:
� � �)(
0,)(,
)(,,
lcL
lzk
lkxc xxcF � (12.1)
� �)(0,
)(,
)(,,
lcL
lzk
lkzc zzcF � (12.2)
gdzie: � � aabl
c xxxmx ��)( , � � aab
lc zzzmz ��)( ,
ab
aL
yyyy
m
� 0, ,
0,0, , LL zx - wspó�rz�dne otrzymane z zale�no�ci (11) zak�adaj�c odpowiedni wersor w operatorze zw��aj�cym � ,
)(,
)(, , l
zklxk cc - wspó�czynniki sztywno�ci.
�W pracy za�o�ono, i� si�y hydrodynamiczne mog� by opisane zgodnie z równaniem
Morisona [8]. Za�o�enie to jest s�uszne zarówno dla lin jak i samego �adunku, je�li wymiar charakterystyczny jest co najmniej pi�ciokrotnie mniejszy od d�ugo�ci fali [9].
Równania ruchu ca�ego uk�adu, wraz z równaniami wi�zów, zapisano w formie uk�adu równa ró�niczkowych: �
� �� �qqGqD
qqHDRqA���
���
,,,,
tt
T �� (13)
gdzie: % &LGWGW IIdiag AAAA ,,,, )2()1()2()1(� , % &)()(
0)( ~,...,~ l
nll
ldiag AAA � ,
�TTLGWGW
TTqqqq )2()1()2()1( ��� - wektor wspó�rz�dnych uogólnionych,
� � � � Tl
nll T
l
T
���
���� qqq ~...~
0)( ,
H - wektor prawych stron równa ruchu, �Tzyxzyx RRRRRR )2()2()2()1()1()1(�R - wektor nieznanych reakcji wi�zów, GD, - macierze wspó�czynników równa wi�zów. �
Równania (13) ca�kowano metod� Rungego-Kutty IV rz�du ze sta�ym krokiem ca�kowania. Warunki pocz�tkowe zagadnienia dynamiki wyznaczano metod� Newtona rozwi�zuj�c uk�ad równa nieliniowych w zadaniu statyki.

94 Marek Szczotka
�
3. PRZY�ADOWE SYMULACJE NUMERYCZNE
W oparciu o wyprowadzony model matematyczny uk�adu zbudowano odpowiedni program komputerowy wykorzystuj�c �rodowisko programistyczne Microsoft Visual C++. Podstawowe dane za�o�one do oblicze przedstawiono w Tabeli 1.
Przyj�te wymuszenie statku w kierunku pionowym i wzd�u�nym (ruchy nurzania i oscylacji wzd�u�nych) jest opisane prostymi funkcjami harmonicznymi, co odpowiada przypadkowi fali regularnej (Rys. 6 a). K�ty obrotu statku przyj�to jako równe zeru. Za�o�ono równie� brak wymuszenia ruchu b�bna wci�garki g�ównej (d�ugo� liny odwini�tej z b�bna nie zmienia si�).
Na dynamik� �adunku oddzia�uj�, oprócz wymusze spowodowanych ruchem statku i/lub nawijaniem liny na b�ben g�ównej wci�garki, si�y hydrodynamiczne. Przyj�to, �e pr�dko� cz�stek wody spowodowana p�ywami wynosi: cv na powierzchni akwenu i maleje liniowo do zera przy powierzchni dna. Dodatkowe zmiany pr�dko�ci wody na danej g��boko�ci wynikaj� z ruchu orbitalnego cz�steczek, wywo�anego falowaniem. Uwzgl�dniono tak�e si�y hydrodynamiczne dzia�aj�ce na liny prowadz�ce i no�n�.
Tablica. 1
Podstawowe parametry modelu przyj�te w obliczeniach Parametr Warto� Parametr Warto�
masa �adunku Lm 4000kg naci�g lin )(,lnomlF , 2,1�l 16.2kN
g��boko� d 400m pr�dko� pr�du morza cv 0.0 - 0.5 sm
wysoko� fali sH 1.0m okres fali zT 9 s wspó�czynnik oporu
hydrodynamicznego �adunku LDC , 2.2 wspó�czynnik oporu
hydrodynamicznego liny lDC , 1.4
promie b�bna wci�garki liny prowadz�cej 0.15m �rednica nominalna lin prowadz�cych 24mm
Rys. 6. a) Przebiegi wymuszenia ruchu jednostki p�ywaj�cej,
b) pr�dko� �adunku wzd�u� osi y
)a )b
v L�[m
/s]�
przemieszczen
ia�[m
]�
czas�[s]czas�[s]

Modelowanie i analiza uk�adu do obs�ugi modu�ów instalowanych na dnie morza 95
�
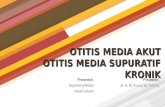
Dla �adunku opuszczonego na g��boko� 300m obliczono przemieszczenia wywo�ane falowaniem i parciem pr�du, a wyniki przedstawiono na Rys. 7. W przypadku braku systemu lin prowadz�cych, odchylenie �adunku w kierunku pr�dko�ci pr�du dochodzi do 4m. Zastosowanie lin prowadz�cych, nawet przy stosunkowo niskim naci�gu, prowadzi do ograniczenia tego przemieszczenia. W analizowanym przyk�adzie odchylenie �adunku wynosi ok. 0.5m. Przyj�ty tryb pracy wci�garek lin prowadz�cych zapewnia wzgl�dnie sta�y naci�g lin, dlatego w przypadku pojawienia si� znacznych si� bocznych (wywo�anych na przyk�ad silnym pr�dem), lina zostanie odwini�ta z b�bna i �adunek podlega zwi�kszonym przemieszczeniom poprzecznym. Po ustaniu si� poprzecznych, sta�y moment nap�dowy powoduje nawijanie si� lin, i �adunek jest sprowadzany do pozycji ustalonej przez napi�cie lin.
Rys. 7. a) Wp�yw lin prowadz�cych na wspó�rz�dn� x �adunku, b) si�y naci�gu liny prowadz�cej przy b�bnie oraz reakcja w miejscu mocowania liny w dnie Warto� bezwzgl�dn� reakcji pionowej obliczonej dla punktu zamocowania liny
prowadz�cej w dnie przedstawia rysunek 7 b). Bezw�adno� uk�adu powoduje, �e sterowanie prac� wci�garki (zastosowano sta�y moment nap�dowy bez informacji o stanie uk�adu) powinno uwzgl�dnia równie� pr�dko� zmiany po�o�enia statku. Niska warto� si� naci�gu lin prowadz�cych oraz znaczna masa �adunku, powoduje du�e warto�ci przemieszcze k�towych (i pr�dko�ci) b�bnów wci�garek, dlatego efekty dynamiczne ujawniaj� si� w postaci waha si�y napi�cia lin.
4. PODSUMOWANIE
W pracy przedstawiono uk�ad systemu do obs�ugi modu�ów stosowanych w instalacjach offshore przy wydobyciu ropy i gazu. Uproszczony model matematyczny umo�liwia wst�pn� analiz� si� powstaj�cych w trakcie pracy urz�dzenia w warunkach falowania morskiego. Wyniki symulacji mog� by przydatne w fazie projektowania urz�dzenia, definiowania wymaga i specyfikacji poszczególnych komponentów uk�adu, jak równie�
)a )b
czas�[s]
x L�[m
] �
F liny��[kN]�
czas�[s]

96 Marek Szczotka
�
do okre�lenia warunków granicznych, przy których mo�liwa jest jeszcze bezpieczna praca urz�dzenia. Ze wzgl�du na znaczne koszty poszczególnych modu�ów instalowanych na dnie morza, operacje zwi�zane z ich przemieszczaniem musz� by wykonane w sposób kontrolowany. Opracowany model i program wzgl�dnie szybko pozwalaj� na ocen� ustawie podstawowych parametrów eksploatacyjnych, geometrycznych i tych zwi�zanych z bezw�adno�ci�, dla danego rodzaju wymuszenia (warunków pogodowych).
Innym mo�liwym zastosowaniem przedstawionego modelu jest sterowanie prac� wci�garek AHC oraz pomocniczych, do uzyskiwania ��danego naci�gu lin prowadz�cych. Mo�liwe jest po��czenie modelu dynamiki z algorytmami sterowania, oraz czujnikami ruchu jednostki. Uk�ad taki zosta�y zbudowany oraz zainstalowany w prezentowanym w pracy urz�dzeniu. Jako� kompensacji waha �adunku, przy masach rz�du 20-30 ton wynosi 95% przy charakterystycznej wysoko�ci fal 5.0m. Wynik ten ca�kowicie wystarcza na bezpieczn� instalacj� infrastruktury w warunkach bardzo intensywnego falowania.
Autor dzikuje firmie AXTech AS (Molde, Norwegia), producentowi systemów MHS, za zgod na opublikowanie zdj� i szereg danych do oblicze.
Bibliografia
1. Hann M.: Komputerowa analiza niezawodno�ci i bezpieczestwa maszyn i konstrukcji okr�towych
poddanych ko�ysaniom. Okr�townictwo i �egluga, 2001. 2. Hann M.: Statics and dynamics of multi-cable systems for semi-submersibles. Marine Structures 1995,
Vol. 8, 1, s. 555-583. 3. Szelangiewicz T.: Wp�yw kotwicznego systemu utrzymania pozycji na ko�ysania statku w obecno�ci
wiatru pr�du i falowania. Prace Naukowe Politechniki Szczeciskiej, Nr 523, 1995. 4. Szczotka M.: Simulation of an AHC system during offshore installation. Logistyka 2010, 2, s. 2311-2320. 5. Craig J.J.: Wprowadzenie do robotyki. WNT, Warszawa 1995. 6. Wittbrodt E., Adamiec-Wójcik I., Wojciech S.: Dynamics of flexible multibody systems. The rigid finite
element method. Springer 2006. 7. Szczotka M.: Pipe laying simulation with an active reel drive. Ocean Eng. 2010, Vol. 37, 2, s. 539-548. 8. Morison J.R., O'Brien M.P., Johnson J.W., Schaaf S.A.: The force exerted by surface waves on piles.
Petroleum Transactions, 1950, Vol. 189, s. 149-154. 9. Chakrabarti S.K.: Hydrodynamics of offshore structures. WIT Press 1987.
MODELLING AND SIMULATION OF AN SUBSEA MODULE HANDLING SYSTEM
Summary: Dedicated, multi-purpose module handling system (MHS) is presented in the paper. Typically such equipment is assembled on a special offshore vessel, performing various construction works related to subsea field developments. Special modules (for example pumps, compressors, special tanks) are lowered towards the seabed and need to be positioned precisely on defined foundation. This is possible thanks to the application of the guide wires and an AHC (Active Heave Compensation) system. The module handling system is useful tool in the case of strong sea currents. When the module has to be lowered directly into a precise location on the seabed, general, offshore crane cannot be used easily. In this case, the MHS is far better solution. A simplified mathematical model of the system is shortly presented in the article, together with some example simulation results. The influence of the guide wires on the behavior of a load is presented through the results. Keywords: MHPS, simulation of module installation, offshore equipment
Recenzent: Lech Kobyli�ski