Metoda wektorowych równań konturowych
27
Analiza kinematyczna mechanizmów Metoda wektorowych równań konturowych
Transcript of Metoda wektorowych równań konturowych

Analiza kinematyczna mechanizmówMetoda wektorowych równań konturowych

Metoda wektorowych równań konturowych
AD
C
B
y
x
j (t)
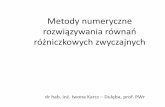
AB=a BC=b CD=c AD=d
d
c
b
a
ra + rb - rd - rc = 0
Dane: j (t)

aay
ax
Metoda wektorowych równań konturowych
ax = a cos ay = a sin
x
y

AD
C
B
y
x
j(t)
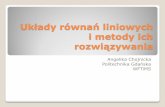
AB=a BC=b CD=c AD=d
d
c
b
a
Dane: j (t)
Metoda wektorowych równań konturowych
3
2
rxa + rx
b - rxd - rx
c = 0ry
a + ryb - ry
d - ryc = 0
ra + rb - rd - rc = 0
a cos j + b cos 2 - d - c cos 3 = 0a sin j + b sin 2 - c sin 3 = 0
Szukane : 2 , 3
2 , 3

2
32
2
32
sinsinsin
coscoscos
cab
cdab
j
j
( )( )
2
32
22
2
32
22
sinsinsin
coscoscos
cab
cdab
j
j
( )( ) ( )2
3
2
3
2
2
2
22
sinsincoscos
sincos
cacda
b
jj
( )33
3
2222
coscossinsin2
cos2cos2
jj
j
ac
cdaddcab
Metoda wektorowych równań konturowych

ac
dcbak
c
dk
a
dk
2
2222
321
( )333231 coscossinsincoscos jjj kkk
Podstawienie:
Metoda wektorowych równań konturowych
( )33
32222
coscossinsin
cos/cos/2/)(
jj
j cdcdacdcab
A. Gronowicz: Podstawy analizy układów kinematycznych

Podstawienie:
21
21
cos
21
22
sin32
32
3
32
3
3
tg
tg
tg
tg
022
332
CBtgAtg
gdzie:
( ) 321
321
cos1sin2
coscos
kkkCB
kkkA
jj
jj
A
ACBBarctg
2
4
2
2
3 2 rozwiązania


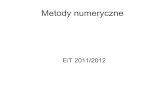
Metoda wektorowych równań konturowychAlgorytmizacja - Matlab
A D
C
B
j(t)
d
c
b
a
3
2a cos j + b cos 2 - d - c cos 3 = 0a sin j + b sin 2 - c sin 3 = 0
Czworobok.m-------------------------------------------function F=czworobok(teta);global fia=0.1; b=0.8; c=0.85; d=0.6;
f1=a*cos(fi)+ b*cos(teta(1))- d-c*cos(teta(2));f2=a*sin(fi)+ b*sin(teta(1)) - c*sin(teta(2));F=[f1 f2];
Start.m----------------------------------------global fiteta0=[1 1.5];for i=1:100
fi=(i-1)*2*pi/100;teta=fsolve(@czworobok, teta0);fi1(i)=fi*180/pi;teta2(i)=teta(1)*180/pi;teta3(i)=teta(2)*180/pi;teta0=teta;
end

0 50 100 150 200 250 300 350 40060
70
80
90
100
110
120
130
fi
teta
2,
teta
3
teta2
teta3
A D
C
B
j(t)
d
c
b
a
3
2
a cos j + b cos 2 - d - c cos 3 = 0a sin j + b sin 2 - c sin 3 = 0
a=0.1; b=0.8; c=0.85; d=0.6;j = 0 - 360o (0 - 2*pi)

Analiza kinematyczna Metoda wektorowych równań konturowych
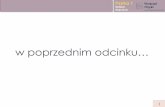
r1 + r2‘ + r2 - r3 - r0= 0
j1 j1

Analiza kinematyczna Metoda wektorowych równań konturowych
r1x + r2
x ’+ r2x - r3
x - r0x = 0
r1y + r2
y ’+ r2y - r3
y - r0y = 0
j1
j3
j2'
j2 Dane: j1(t)
Szukane: j2‘, r2
j2 j2‘ 270o
j3 j2‘
r1 cos j1 + r2‘ cos j2‘ + r2 cos(j2‘ 270o) - r3 cos j2
‘ - r0 = 0r1 sin j1 + r2‘ sin j2‘ + r2 sin(j2
‘ 270o) - r3 sin j2‘ = 0
r1 + r2‘ + r2 - r3 - r0= 0
r1 cos j1 + r2‘ cos j2‘ + r2 cos j2 - r3 cos j3 - r0 = 0r1 sin j1 + r2‘ sin j2‘ + r2 sin j2 - r3 sin j3 = 0
r2 , j2’

0rrrr
0rrrr
7865
4132
4 równania rzutów
Metoda wektorowych równań konturowych
r2
r3
r4
r1
r5
r6
r7
r8

Metoda wektorowych równań konturowych

Metoda wektorowych równań konturowych
Położenia prędkości przyspieszenia
AD
C
B
y
x
1(t)
d
c
b
a
Dane:
3
2
ra + rb - rd - rc = 0
Szukane :
2
12
111
111
1 )(
dt
d
dt
d
dt
d
t
3322
3322
32
,
,
,
Równanie położeń:

Szukane:
0sinsinsin
0coscoscos
321
321
cba
cdba
Równania rzutów:
Równania prędkości – pierwsza pochodna względem czasu
0sinsinsin 332211 cba
0coscoscos 332211 cba
ra + rb - rd - rc = 0
Równanie położeń:
rxa + rx
b - rxd - rx
c = 0ry
a + ryb - ry
d - ryc = 0
Dane: 1, Wyznaczone: 2 , 3
3322 , Dane: 11

Po uporządkowaniu:
0coscos
sinsin
cos
sin
3
2
32
32
1
1
1
cb
cb
a
a
11
11
3
2
cos
sin
a
aA
11
1
3
2
32
32
cos
sin
coscos
sinsin
a
a
cb
cb
32
32
coscos
sinsin
cb
cbA
11
1
3
2
cos
sin
a
aA

Metoda wektorowych równań konturowych
Prędkości – odwracanie macierzy A
32
32
coscos
sinsin
cb
cbA
Odwracanie macierzy:
A-1= 1/det(A) *ATdop
gdzie:
det(A) - wyznacznik macierzy
Adop - macierz dopełnień algebraicznych
adopij = (-1)i+j Mij
......
......
......ij
dopdop aA

Metoda wektorowych równań konturowych
Prędkości – odwracanie macierzy A
0coscos
sinsin)det(
32
32
cb
cbA
)sin( )sincoscos(sin)det(
32
3232
bcbcA
T
dop
32
1 A )sin(
1
bcA

D=Metoda wektorowych równań konturowych
Prędkości – odwracanie macierzy A
Warunek istnienia macierzy odwrotnej A-1 :
det(A) ≠ 0
)sin()det( 32 bcA
0)sin()det( 32 bcA ?, 32
Jeżeli det(A) = 0, macierz A-1 nie istnieje. Co to oznacza?

Metoda wektorowych równań konturowych
Położenia osobliwe
0)sin()det( 32 bcA
1) b = 0 lub c =0A D
C
B
1(t)
d
c
b
a
3
2
AC=D
B
1(t)
d
c=0
a b
AD
B =C
1(t)
d
b=0
a c
Układy zdegenerowane

Metoda wektorowych równań konturowych
Położenia osobliwe
0)sin()det( 32 bcA
A D
C
B
1(t)
d
c
b
a
3
22) 2 3
A
D
C
B
3
2
3 2
1(t)

Metoda wektorowych równań konturowych
Położenia osobliwe
0)sin()det( 32 bcA
A D
C
B
1(t)
d
c
b
a
3
2
3) 2 3 p 2 3 p
4) 2 3 p 3 2 p
A
D
C
B
3
2
2 3 p
1(t)
A
DCB
3
2
3 2p
1(t)

Metoda wektorowych równań konturowych
Położenia osobliwe
0)sin()det( 32 bcA
5) 2 p 3 2 0, 3 p
A
D
CB
3
2= 0
1(t)
A D
CB 3=p
2= 0
1(t)
A
D
CB
3
2= 0
1(t)A
D
C
B
3
2> 0
1(t)

Równania prędkości
Równania przyspieszeń – druga pochodna względem czasu
0sincos
sincossincos
0cossin
cossincossin
3
2
333
2
2
2221
2
111
3
2
333
2
2
2221
2
111
cc
bbaa
cc
bbaa
3,2,12
2
idt
d
dt
di
iii
Metoda wektorowych równań konturowych
Przyśpieszenia
0coscoscos
0sinsinsin
332211
332211
cba
cba

Dane napęd:Wyliczone położeniai prędkości:
Szukane:
0sinsin
coscos
coscos
sinsin
sincos
cossin
2
3
2
2
32
32
3
2
32
32
2
1
1
11
11
cb
cb
cb
cb
aa
aa
Po uporządkowaniu:
111 , ),( t
2
3
2
2
32
32
2
1
1
11
11
3
2
32
32
sinsin
coscos
sincos
cossin
coscos
sinsin
cb
cb
aa
aa
cb
cb
3232 , , ,
3322 ,

2
1
1
11
11
2
3
2
2
32
32
1
32
32
3
2
sincos
cossin
sinsin
coscos
coscos
sinsin
aa
aa
cb
cb
cb
cb
32
32
coscos
sinsin
cb
cbB
1
32
321
coscos
sinsin
cb
cbB
2
1
1
11
11
2
3
2
2
32
321
3
2
sincos
cossin
sinsin
coscos
aa
aa
cb
cbB